
マルチモードのGPS使用可能カメラ
【課題】GPS使用可能移動局記録デバイスにおいてロケーション位置を画像にタグ付けするために、カメラを具備するデバイス中で画像に地理的タグ付けする方法で、画像を取り込み、ポジションを決定するし、決定したポジションを画像にタグ付けする。
【解決手段】画像を取り込むことと、衛星信号とワイヤレスネットワーク信号との検出に基づいて、ポジションを決定することと、決定したポジションを画像にタグ付けすることとによって、画像に地理的タグ付けする。
【解決手段】画像を取り込むことと、衛星信号とワイヤレスネットワーク信号との検出に基づいて、ポジションを決定することと、決定したポジションを画像にタグ付けすることとによって、画像に地理的タグ付けする。
【発明の詳細な説明】
【関連技術の相互参照】
【0001】
該当なし。
【発明の背景】
【0002】
発明の分野
本発明は、一般的に、位置特定に関し、さらに詳細には、GPS使用可能移動局記録デバイスにおいてロケーション位置を画像にタグ付けすることに関する。
【0003】
発明の背景
写真を位置特定するマッピングシステムの人気が高まり続けることで、信頼できて、強固で、迅速で、正確な位置特定をカメラの機能とともに自動的に結び付ける、より多くの製品を消費者は望むだろう。知られているGPS使用可能カメラは、それぞれの写真が取り込まれた後にロケーション位置を決定する。これらのデバイスは、独立して動作する。すなわち、カメラは日付タイムスタンプを提供し、そして、GPSデバイスは、スタンドアローンGPSを使用して、日付および時間とともにロケーションのログを取る。後続する処理は、2組のデータをPC上でバッチ処理して、共通のタイムスタンプに基づいて写真をロケーションと組み合わせる。GPS使用可能カメラを使用してロケーション位置を決定する際の遅延が、大幅であることがある。さらに、GPS使用可能カメラは、そのユーザのニーズに最も合うようにユーザによってコンフィギュレーション可能ではなく、そして、位置特定を支援するために、ワイヤレスネットワークから取得したデータを使用しない。音声およびデータコールを行うためにワイヤレスネットワークを使用するGPS使用可能移動局もまた、より一般的になっている。FCCの911指令を満たすように、そして移動体のアプリケーションとユーザ対話とに対して拡張した機能性を提供するように、このようなGPS使用可能移動局を採用している。このようなカメラおよび移動局は、衛星のGPSネットワークとワイヤレスネットワークとの組み合わせた特徴を組み込んでおらず、画像を取り込むときにこの機能を利用しない。したがって、画像を取り込むときに使用する、これらの欠点のうちの1つ以上の欠点もない、よりフレキシブルで強固で位置特定システムが存在する必要がある。
【0004】
概要
本発明のいくつかの実施形態は、カメラを具備するデバイス中で画像に地理的タグ付けする方法を提供する。方法は、画像を取り込むことと;衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定することと;決定したポジションを画像にタグ付けすることとを含む。
【0005】
本発明のいくつかの実施形態は、カメラを具備するデバイス中で画像に地理的スタンプ付けする方法を提供する。方法は、衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定することと;ポジションを決定する動作の後に、画像を取り込むことと;決定したポジションを画像にタグ付けすることとを含む。
【0006】
本発明のいくつかの実施形態は、カメラを具備するデバイス中で画像のバッチを地理的スタンプ付けする方法を提供する。方法は、複数の画像を取り込むことと;複数の画像を選択することと;衛星信号の検出と、ワイヤレスネットワーク信号の検出とに基づいて、ポジションを決定することと;決定したポジションを複数の画像にタグ付けすることとを含む。
【0007】
本発明のいくつかの実施形態は、カメラを具備し、画像に地理的タグ付けするデバイス提供する。デバイスは、画像を取り込む手段と;衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段と;決定したポジションを画像にタグ付けする手段とを具備する。
【0008】
本発明のいくつかの実施形態は、カメラを具備し、画像のバッチを地理的スタンプ付けするデバイスを提供する。デバイスは、複数の画像を取り込む手段と;複数の画像を選択する手段と;衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段と;決定したポジションを複数の画像にタグ付けする手段とを具備する。
【0009】
本発明のいくつかの実施形態は、コンピュータ読み取り可能媒体を具備するコンピュータ読み取り可能プロダクトを提供する。コンピュータ読み取り可能媒体は、少なくとも1つのコンピュータに実行させるためのコードと、画像を取り込むように少なくとも1つのコンピュータに実行させるためのコードと;衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定するように少なくとも1つのコンピュータに実行させるためのコードと;決定したポジションを画像にタグ付けするように少なくとも1つのコンピュータに実行させるためのコードとを含む。
【0010】
本発明のいくつかの実施形態は、コンピュータ読み取り可能媒体を具備するコンピュータ読み取り可能プロダクトを提供する。コンピュータ読み取り可能媒体は、複数の画像を取り込むように少なくとも1つのコンピュータに実行させるためのコードと、複数の画像を選択するように少なくとも1つのコンピュータに実行させるためのコードと、衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定するように少なくとも1つのコンピュータに実行させるためのコードと、決定したポジションを複数の画像にタグ付けするように少なくとも1つのコンピュータに実行させるためのコードとを含む。
【0011】
本発明の、これらおよび他の様態、特徴、および利点は、以下で記述する実施形態に対する参照から明らかになるだろう。
【図面の簡単な説明】
【0012】
図面を参照して、ほんの一例として、本発明の実施形態を記述する。
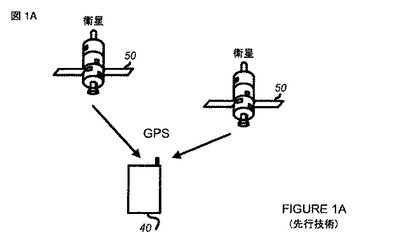
【図1A】図1Aは、信号を移動局に提供する衛星ビークルを示している。
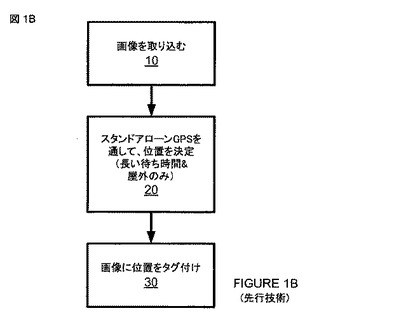
【図1B】図1Bは、ロケーション位置を画像にタグ付けするプロセスを示している。
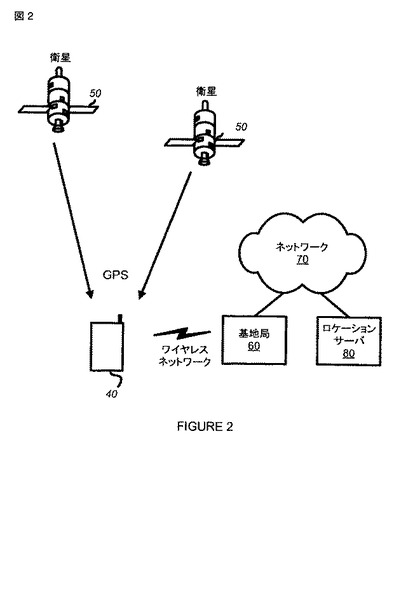
【図2】図2は、ワイヤレスネットワークおよび衛星ビークルと通信している移動局を示している。
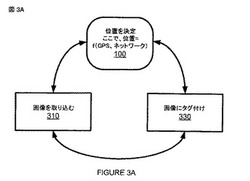
【図3A】図3Aは、本発明のいくつかの実施形態にしたがった、状態図を示している。
【図3B】図3Bは、本発明のいくつかの実施形態にしたがった、真偽表を示している。
【図4】図4は、本発明のいくつかの実施形態にしたがった、ロケーション位置を設定する手段を決定するフローチャートを示している。
【図5A】図5Aは、本発明のいくつかの実施形態にしたがった、スクリーンショットを図示している。
【図5B】図5Bは、本発明のいくつかの実施形態にしたがった、スクリーンショットを図示している。
【図6A】図6Aは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図6B】図6Bは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図6C】図6Cは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
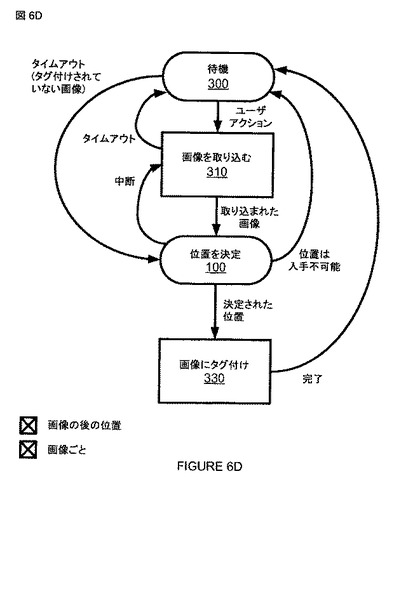
【図6D】図6Dは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示しているフローチャートを示している。
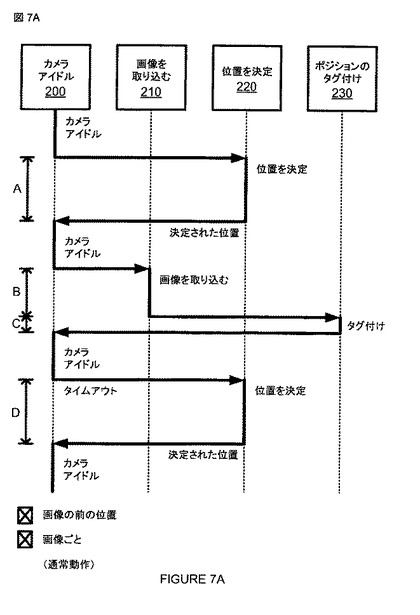
【図7A】図7Aは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
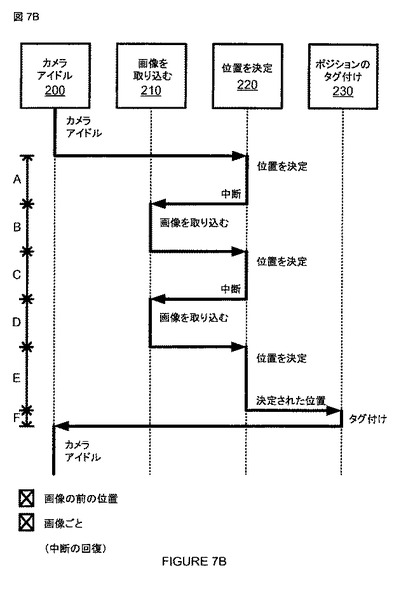
【図7B】図7Bは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
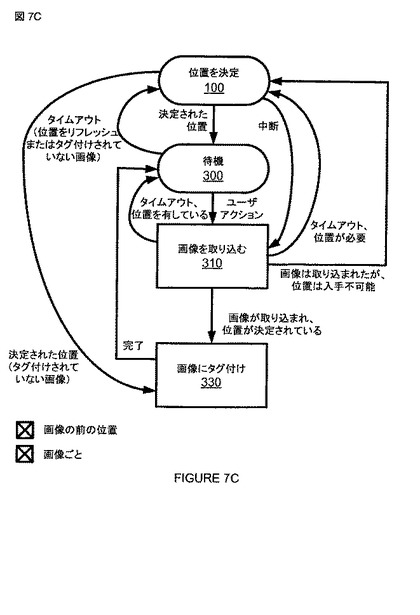
【図7C】図7Cは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示しているフローチャートを示している。
【図8A】図8Aは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図8B】図8Bは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図8C】図8Cは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示しているフローチャートを示している。
【図9A】図9Aは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図9B】図9Bは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図9C】図9Cは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示しているフローチャートを示している。
【図10A】図10Aは、本発明のいくつかの実施形態にしたがった、画像にタグ付けするプロセスフローを示している。
【図10B】図10Bは、本発明のいくつかの実施形態にしたがった、画像にタグ付けするプロセスフローを示している。
【本発明の詳細な説明】
【0013】
以下の記述では、本発明のいくつかの実施形態を図示している図面に対して、参照を行う。他の実施形態を利用してもよく、機械的、構成的、構造的、電気的、動作的変更を、本開示の精神および範囲から逸脱せずに行ってもよいことを理解する。以下の詳細な説明は、限定的に解釈すべきものではない。さらに、後続する詳細な説明のいくつかの部分は、電子回路中で、または、コンピュータメモリ上で実行できるデータビットに関する動作の、手順や、ステップや、論理ブロックや、処理や、他の記号的な表現の観点で示している。手順や、コンピュータ実行されるステップや、論理ブロックや、プロセス等は、所望の結果に導くステップまたは命令の首尾一貫したシーケンスであると、ここでは考える。ステップは、物理量の物理的操作を利用するステップである。これらの量は、記憶したり、転送したり、合成したり、比較したり、そうでなければ電子回路中でまたはコンピュータシステム中で操作したりすることができる、電気、磁気、または無線信号の形態をとることができる。これらの信号を、時には、ビット、値、エレメント、シンボル、キャラクタ、ターム、数と呼ぶことがあり、またはこれらの類するもので呼ぶことがある。それぞれのステップは、ハードウェア、ソフトウェア、ファームウェア、またはこれらの組み合わせによって実行してもよい。ハードウェアインプリメンテーションでは、例えば、処理ユニットは、1つ以上の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSP)、プログラマブルロジックデバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、制御装置、マイクロ制御装置、マイクロプロセッサ、電子デバイス、ここで記述した機能を実行するように設計されている他のデバイスユニット、および/またはこれらを組み合わせたもの内で実現してもよい。
【0014】
この明細書全体を通して、「1つの例」、「1つの特徴」、「例」、または「特徴」に対してなされる参照は、特徴および/または例に関連して記述する、特定の特徴、構成、または特徴は、主張する主題事項のうちの少なくとも1つの特徴および/または例に含まれることを意味する。したがって、この明細書全体を通したさまざまな場所におけるフレーズ「1つの例において」、「例」、「1つの特徴において」、または「特徴」の登場は、必ずしも、すべてが同じ特徴および/または例に言及しているわけではない。さらに、特定の、特徴、構成、または特性を、1つ以上の例および/または特徴に組み合わせてもよい。
【0015】
ここで言及する「命令」は、1つ以上の論理動作を表す表現に関連している。例えば、命令は、1つ以上のデータオブジェクト上で1つ以上の動作を実行する機械によりインタープリタ可能であることによって、「機械読み取り可能」である。しかしながら、これは、単なる命令の例であり、主張する主題事項はこの観点に限定されない。別の例では、ここで言及する命令は、エンコードされたコマンドを含むコマンドセットを有する処理回路によって実行可能であるエンコードされたコマンドに関連していることがある。このような命令は、処理回路によって理解される機械言語の形態でエンコードされてもよい。さらに、これらは、単なる命令の例であり、主張する主題事項は、この観点で限定されない。
【0016】
ここで言及する「記憶媒体」は、1つ以上の機械によって認識可能である表現を維持することができる媒体に関連している。例えば、記憶媒体は、機械読み取り可能な命令および/または情報を記憶する1つ以上の記憶デバイスを含んでいてもよい。このような記憶デバイスは、例えば、磁気、光学、または半導体記憶媒体を含むいくつかの媒体のタイプのうちの任意のものを含んでいてもよい。このような記憶デバイスは、長期間、短期間、揮発性または不揮発性メモリデバイスの何らかのタイプも含んでいてもよい。しかしながら、これらは、記憶媒体の単なる例であり、主張する主題事項はこれらの観点に限定されない。
【0017】
特に述べられていない限り、以下の説明から明らかであるように、「処理する」、「計算する」、「算出する」、「選択する」、「形成する」、「使用可能にする」、「阻止する」、「位置付ける」、「終了する」、「識別する」、「開始する」、「検出する」、「取得する」、「ホスト処理する」、「維持する」、「表す」、「推定する」、「受信する」、「送信する」、「決定する」、および/またはこれらに類するもののような用語を利用しての、この明細書全体を通した説明は、コンピュータまたは類似した電子コンピューティングデバイスのようなコンピューティングプラットフォームによって実行されてもよいアクションおよび/またはプロセスに、そして、コンピューティングプラットフォームのプロセッサ、メモリ、レジスタ、および/または他の情報記憶装置、送信デバイス、受信デバイス、および/またはディスプレイデバイス内の物理電子および/または磁気量および/または他の物理量として表現したデータを操作および/または変形するアクションおよび/またはプロセスに関連していることを、正しく認識する。このようなアクションおよび/またはプロセスは、例えば、記憶媒体中に記憶されている機械読み取り可能な命令の制御のもと、コンピューティングプラットフォームによって実行してもよい。このような機械読み取り可能な命令は、例えば、コンピューティングプラットフォームの一部として備えられている(例えば、処理回路の一部として備えられている、または、このような処理回路の外部にある)記憶媒体中に記憶されているソフトウェアまたはファームウェアを含んでいてもよい。さらに、特に述べられていない限り、フロー図を参照してまたは別の方法で、ここに記述するプロセスは、このようなコンピューティングプラットフォームによって、全体的にまたは部分的に実行および/または制御してもよい。
【0018】
ここで記述するワイヤレス通信技術は、ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)等のような、さまざまなワイヤレス通信ネットワークに関連することがある。用語「ネットワーク」および「システム」は、ここで、区別なく使用していることがある。WWANは、コード分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、単一搬送波周波数分割多元接続(SC−FDMA)ネットワーク等であってもよい。無線技術の例をいくつか挙げると、CDMAネットワークは、CDMA2000、ワイドバンドCDMA(W−CDMA)のような1つ以上の無線アクセス技術(RAT)を実現してもよい。ここで、CDMA2000は、IS−95、IS−2000、およびIS−856標準規格にしたがって実現される技術を含んでいてもよい。TDMAネットワークは、グローバルシステムフォーモバイル通信(GSM)(登録商標)、デジタルアドバンスド移動体電話機システム(D−AMPS)、または他のいくつかのRATを実現してもよい。GSMおよびW−CDMAは、「第3世代パートナーシッププロジェクト」(3GPP)と名付けられているコンソーシアムによる文書中に記述されている。CDMA2000は、「第3世代パートナーシッププロジェクト2」(3GPP2)と名付けられているコンソーシアムによる文書中に記述されている。3GPPおよび3GPP2の文書は、公に入手可能である。例えば、WLANは、IEEE802.11xネットワークを含んでいてもよく、WPANは、ブルートゥース(登録商標)ネットワーク、IEEE802.15xを含んでいてもよい。WWAN、WLAN、および/またはWPANを任意に組み合わせたものに関連して、ここで記述したワイヤレス通信インプリメンテーションを使用してもよい。
【0019】
図1Aは、信号を移動局40に提供している衛星ビークル50を示している。ここで使用したように、ハンドヘルド移動体デバイスまたは移動局(MS)は、その時々に変化するポジションまたはロケーションを有し得るデバイスに関連する。ポジションおよび/またはロケーションの変化は、ほんの数例として、方向、距離、向き等に対する変化を含んでいてもよい。特定の例では、移動局40は、セルラ電話機、ワイヤレス通信デバイス、ユーザ機器、ラップトップコンピュータ、パーソナルナビゲーションデバイス、他のパーソナル通信システム(PCS)デバイス、および/または他のポータブル通信デバイスを含んでいてもよい。移動局40はまた、機械読み取り可能な命令によって制御される機能を実行するように適合されている、プロセッサおよび/またはコンピューティングプラットフォームを備えていてもよい。
【0020】
ハンドへルド移動体デバイス40および/またはシステムは、衛星50から受信した信号に少なくとも部分的に基づいてデバイスのロケーションを推定してもよい。特に、このようなデバイス40および/またはシステムは、関係する衛星とナビゲーション衛星受信機との間のおよその距離を含む「擬似距離」測定値を取得してもよい。特定の例では、このような擬似距離は、1つ以上の衛星50からの信号を処理できる受信機において、衛星ポジショニングシステム(SPS)の一部として決定されてもよい。このようなSPSは、例えば、2、3個例を挙げると、グローバルポジショニングシステム(GPS)、Galileo、Glonass、または将来開発される何らかのSPSを含んでいてもよい。そのポジションを決定するために、衛星ナビゲーション受信機は、3つ以上の衛星に対する擬似距離測定値とともに、送信時におけるこれらの衛星のポジションを取得してもよい。衛星の軌道パラメータを把握することによって、任意の時点に対するこれらのポジションを計算することができる。その後、擬似距離測定値は、光速によって乗算される、信号が衛星から受信機に伝わる時間に、少なくとも部分的に基づいて決定されてもよい。具体的な実例として、SPSの、GPSおよび/またはGalileoタイプのロケーション決定のインプリメンテーションとして、ここで記述した技術を提供することがある一方で、これらの技術を他のタイプのSPSにも適用してもよいこと、そして主張する主題事項がこの観点に限定されないことを、理解すべきである。
【0021】
例えば、前述したSPSを含む、いくつかのSPSのうちの任意のものとともに、ここで記述した技術を使用してもよい。さらに、衛星と擬似衛星とを組み合わせたもの、または、擬似衛星を利用するポジショニング決定システムとともに、この技術を使用してもよい。擬似衛星は、GPS時間と同期されることがあるL帯域(または他の周波数)搬送波信号上で変調されるPRNコードまたは(例えば、GPSまたはCDMAセルラ信号に類似した)他のレンジングコードをブロードキャストする地上の送信機を備えていてもよい。遠隔受信機による識別を可能にするように、このような送信機に、一意的なPRNコードが割り当てられることがある。トンネル、鉱山、建物、都市の谷間、または他の閉じられたエリアにおけるような、軌道衛星からのSPS信号が入手不可能である状況に、擬似衛星は役立つかもしれない。擬似衛星の別のインプリメンテーションは、無線ビーコンとして知られている。ここで使用する用語「衛星」は、擬似衛星、擬似衛星の均等物、そして場合によっては他のものを含むことを意図している。ここで使用する用語「SPS信号」は、擬似衛星からのSPSと同様な信号、または、擬似衛星の均等物を含むことを意図している。
【0022】
ハンドヘルド移動体デバイス40および/またはシステムは、SVS信号(例えば、GPS信号)を受信するための第1の受信機と、ネットワーク情報を受信するための第2の受信機(例えば、移動電話機受信機またはトランシーバまたはセルラ電話機受信機またはトランシーバ)と、画像取り込みデバイス(例えば、カメラ)とを備えている。ネットワーク情報を受信するための第2の受信機は、セルラ電話機の一部であってもよい。これらのケースでは、移動体デバイス40は、カメラおよび機能性移動電話機の双方として動作でき、これにより、ユーザは、双方向の音声および/またはデータ通信のような、典型的な移動電話機機能を持つことができる。代替的に、第2の受信機は、機能性移動電話機に結合されていなくてもよい。これらのケースでは、移動体デバイス40は、(すなわち、ネットワーク情報による、および、SVS信号による)位置特定の手段を備えているが、典型的な移動電話機の機能を持たない、拡張したカメラであると考えてもよい。
【0023】
ハンドヘルド移動体デバイス40および/またはシステムは、カメラ、ビデオカメラ、または他の画像センサのような、画像を取り込む手段をさらに備えていてもよい。センサは、静止画像、サウンドありの動画画像、サウンドなしの動画画像、またはサウンドトラックを、単独で、または、任意の組み合わせで取り込んでもよい。
【0024】
ハンドヘルド移動体デバイス40および/またはシステムは、衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段をさらに備えていてもよく、この手段には、1つ以上のマイクロプロセッサ、制御装置、ハードウェア、ファームウェアおよび/またはソフトウェアといったものがある。ハンドヘルド移動体デバイス40および/またはシステムは、決定したポジションを画像にタグ付けする手段をさらに備えていてもよく、1つ以上のマイクロプロセッサ、制御装置、ハードウェア、ファームウェアおよび/またはソフトウェアを備えている。
【0025】
いくつかの実施形態では、ハンドヘルド移動体デバイス40は、センサ、ワイヤレス受信機またはワイヤレストランシーバ、SPS受信機およびプロセッサを備えている。データを取り込むために、感知したデータのプロセッサと対であることが多いセンサを使用する。センサは、静止画像を取り込むための画像センサであってもよい。代替的に、センサは、オーディオトラックを取り込むために使用されるオーディオセンサであってもよい。代替的に、センサは、動画を取り込むために使用されるビデオセンサであってもよい。代替的に、センサは、画像センサおよびオーディオセンサの双方とも備えていてもよい。
【0026】
以下で図3Bに関して説明するように、ネットワークカバレッジを決定したり、1つ以上の基地局のポジション情報を取得したりするために、ワイヤレス受信機またはワイヤレストランシーバを使用する。1つ以上のSVに対して、SPSカバレッジを決定したり、移動体デバイス40のポジション情報を取得したりするために、GPS受信機のようなSPS受信機を使用する。画像センサや、ワイヤレス受信機または送信機や、SPS受信機を調整したり、画像をロケーション情報と合成、または、ロケーション情報を画像にタグ付けしたりするために、プロセッサを使用する。
【0027】
図1Bは、ロケーション位置を画像にタグ付けするプロセスを示している。例えば、決定したポジションをデジタル画像と関係付けることによって、デジタル画像は、地理的起源の表示がタグ付けされてもよい。代替的に、タグは、デジタル画像を含むデジタルファイル内の埋め込まれたフィールド(例えば、ヘッダ)中に記憶されてもよい。代替的に、タグは、デジタル画像をレビューするときに認識可能な、(例えば、写真上の日付け/タイムスタンプに類似した)可視または可聴ラベルの形態であってもよい。タグは、緯度および経度を含んでいてもよい。タグは、高度も含んでいてもよい。代替的に、または、さらに、タグは、都市または地方のアドレスに変換されてもよい。
【0028】
ステップ10において、移動局40が、画像データを取り込む(例えば、サウンドありの、または、サウンドなしのビデオ画像あるいは静止画像を取得する、あるいはオーディオトラクトを記録する)。次に、ステップ20において、移動局40が、スタンドアローンGPS技術を使用して、ロケーション位置を決定する。例えば、移動局40は、複数の衛星ビークル50からのGPS信号を検出したり、捕捉したり、復調したりしようと試行する。ここで提供する例において、GPS信号およびGPSシステムに対してなされる言及は、例示によってのみ参照される。さまざまな衛星ポジショニングシステム(SPS)技術のうちの任意のもの(例えば、GPSや、Galileoや、Glonass)を使用してもよい。一般的に、このような移動局40が、オープンな屋外環境中にあるときに、このGPS信号を捕捉する際、移動局40は最適に動作するが、残念なことに、このプロセスは、かなりの時間がかかる。最終的に、いったんロケーション位置が決定されると、移動体デバイス40がロケーション位置を画像にタグ付けする。
【0029】
図2は、ワイヤレスネットワークと通信している移動局40と、衛星ビークル50とを示している。いくつかの移動体デバイス40は、いずれもGPS使用可能であり、ワイヤレスネットワークと通信することができる。ワイヤレスネットワークは、基地局60と、ロケーションサーバ(LS)80と、ネットワーク70とを含む。基地局60(例えば、基地トランシーバ局(BTS)や、基地局制御装置(BSC)や、アクセスポイントや、これらに類するもの)は、無線送信機および受信機を備えており、特定のセルにおける音声およびデータコールを、移動体電話機とネットワークとに、そして移動体電話機とネットワークとから接続するために使用される。ロケーションサーバ80は、移動局のロケーションを決定する際に、移動局と協働する。ロケーションサーバは、移動局40がネットワークに接続されているのはどの基地局60かを把握することによって、移動局40を粗く位置付けるかもしれない。さらに、ロケーションサーバ80は、支援データを移動局40に送ってもよく、支援データは、暦および天体暦の衛星軌道データや、時間情報や、ドップラーウィンドウや、利用可能な衛星をより速く自動的に追跡する際に移動局40を支援するための他のサーチ支援データからなる。ロケーションサーバ80は、生のロケーションデータを移動局40から受信してもよい。ロケーションサーバ80は、移動局40よりも、計算能力がより高いので、ロケーションサーバ80は、移動局40からロケーションサーバ80に中継された信号を、より良く処理することができる。このようなコンフィギュレーションは、計算の大部分をロケーションサーバ80上にオフロードすることによって、GPS位置特定のために必要とされるCPU処理能力量を移動局40が減少させることができる。ネットワーク70は、さまざまなネットワーク相互接続コンポーネント(例えば、基地局制御装置(BSC)や、移動体スイッチングセンター(MSC)や、公衆電話交換ネットワーク(PSTN)や、これらに類するもの)を含む。
【0030】
本発明にしたがった、単一のデバイスには、画像取り込みデバイス(例えば、カメラ)、移動局(例えば、セルラ移動電話機)や、位置特定デバイス(例えば、GPSユニット)の機能性がある。しかしながら、3つのデバイスを単一のハウジングに単に組み合わせることは、ユーザビリティを不十分にすることがあり、いくつかの障害を招く。第1に、1つより多いバッテリーまたは電源を必要とすることがある。第2に、このような、集積デバイスは、回路を共有していない;したがって、一定の比率に応じて情報を共有しない。第3に、画像取り込みと、移動電話機の動作と、位置特定は、必然的に衝突する。第4に、重複したハードウェアを使用する。例えば、3つのデバイスは、それぞれ、プロセッサを有しており、プロセッサは、他の2つのプロセッサの状態に対するアクセスを持っておらず、都合よく情報を共有する能力を制限する。
【0031】
3つの独立したデバイスが、3つのデバイスの機能に対して単一のプロセッサを有するデバイスに組み込まれていると仮定すると、他のいくつかの障害に直面するかもしれない。例えば、実行する位置特定タスクと実行する取り込み画像タスクとの間に、競合が生じるかもしれない。位置特定には、かなりの量の処理能力が必要である。このことにより、ユーザが、位置特定エンジン実行に並行して、画像を取り込もうと試行したときに、取り込みタスクにかなりの待機時間を生じさせる。したがって、プロセッサの処理能力が不十分である場合には、優先スキームが必要であるかもしれない。例えば、画像を取り込むことは、ユーザが画像を取り込み始めたときに位置特定を停止させることになる可能性があるが、いったんユーザが画像を取り込むことを完了すると、位置特定タスクを再開させる必要があるかもしれない。
【0032】
以下で記述した実施形態のうちのいくつかが、これらの障害のうちの1つ以上の障害を緩和する。このような実施形態は、複数の機能タスク間の通信および対話を調整して、拡張機能およびユーザ経験を効果的に提供するように結合されている1つ以上のプロセッサを含んでいてもよい。
【0033】
マルチプロセッサソリューションは、共有メモリを含んでいてもよく、これにより、別個のプロセッサ上で実行するタスクが通信することを可能にする。例えば、第1のプロセッサ上で実行している位置特定タスクが、ロケーションを周期的に決定し、その決定したロケーションを共有メモリロケーション(例えば、メモリロケーションにアクセスするための2つのバスを有するメモリ)中に記憶してもよい。取り込み画像タスクは、第2のプロセッサ上で実行しているかもしれない。それぞれの画像が取り込まれた後に、共有メモリ中に記憶した最後のポジションを取り出すために、取り込み画像タスクが共有メモリにアクセスしてもよい。
【0034】
十分な処理能力を利用可能である場合には、単一のプロセッサソリューションが、2つ以上のタスクを並列して実行してもよい。例えば、取り込みタスクが、ドータータスクとして位置特定タスクをコールしてもよい。代替的に、単一プロセッサは、タスクを連続して実行してもよい。例えば、それぞれのタスクに、異なる優先順位を割り当ててもよく、これにより、1つのタスクがより高い優先順位を持つことを可能にし、より低い優先順位のタスクデバイスを中断することを可能にする。ハードウェアは、位置特定タスクを最初に実行し、その後、画像取り込みを促進するために、画像取り込みが、位置特定を一時的に停止させることを可能にしてもよい。いったん取り込み画像タスクがその処理を完了すると、位置特定タスクは、中断されたところから開始してもよい。
【0035】
いくつかの実施形態では、ユーザが画像を取り込み始めるまで、位置特定エンジンはアイドルである。ユーザが画像を取り込み始めた後に、いったん処理能力が入手可能であると(例えば、いったんユーザが画像または一連の画像を取り込み終えると、あるいは代替的に、いったんユーザが最初の画像を取り込み始めると)、取り込み画像プロセスは、位置特定エンジンを開始する。ポジション位置が入手可能になったとき、(例えば、別個のタグ付けタスク、または代替的に、画像取り込みタスクまたは位置特定タスクによる)タグ付け動作に戻って、位置特定タグを待っているそれぞれの画像にタグ付けする。いったん画像取り込みプロセスが完了して、画像がタグ付けされると、画像取り込みタスクは、アイドル状態に戻るように位置特定タスクに命令してもよい。
【0036】
さらに、より詳細に以下で記述するように、他のコンフィギュレーションが可能である。
【0037】
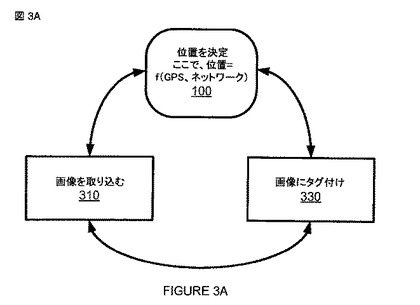
図3Aおよび図3Bは、本発明のいくつかの実施形態にしたがった、状態図および真偽表を示している。処理能力に制限のある移動局や、バッテリー電力の制限のある移動局は、3つのアクティブモード:状態100、状態310、および状態330のうちの1つで動作してもよい。特定の状況に応じて、移動局は、1つの何らかの状態から他の何らかの状態に移行してもよい。状態100において、移動局が、GPS衛星システムおよびワイヤレスネットワークからのデータの、品質と入手可能性とに基づいてロケーション位置を決定している。ロケーション位置は、1つ以上のGPS衛星から受信したデータのみから、1つ以上の基地局から受信したデータのみから、またはGPS衛星および1つ以上の基地局の双方から受信したデータから決定してもよい。例えば、ロケーション位置は、基地局によってブロードキャストされた識別子(例えば、セルまたはアクセスポイントの識別子)からのものであってもよく、あるいは、地上基地局にそれぞれ関係する複数のロケーションを重み付けることから決定してもよい。
【0038】
移動局が画像を取り込んでいないときや、有効なロケーション位置が入手不可能であるときに、移動局は状態100に入る。決定したポジションは、単一のポジション、ポジションの平均、ポジションの重み付けされた平均、ポジションの時間平均、またはこれらに類したものであってもよい。例えば、ポジションは、ポジションのシーケンスの補間からなっていてもよい。例えば、ビデオが取り込まれた直前および直後のポジションの補間を、決定したポジションとしてビデオ画像に対して使用してもよい。画像を取り込むプロセスをユーザが開始したときに、移動局は、状態100を中断し、いったん十分なロケーション位置が決定されると状態100を出てもよい。代替的に、移動局は、以下の手段:スタンドアローンGPSポジション決定、MSベースのポジション決定、MS支援ポジション決定、および/または、長期間の軌道情報によるスタンドアローンGPSポジション決定、のうちの1つ以上のものによって決定された1つ以上のポジションを補間してもよい。
【0039】
状態310において、移動局は、画像を取り込むプロセスにある。ユーザが、取り込み、すなわち記録ボタンをアクティブ化したときに、移動局は状態310に入る。(例えば、画像を最後に取り込んだときから予め定められた時間の後に)いったん画像取り込みプロセスが完了すると、移動局は状態310を出る。状態330において、移動局が、以前に取り込んだ画像にタグ付けする。有効なロケーション位置が存在するときに、いったん取り込まれた画像にポジションタグがないと、移動局はこの状態に入る。移動局はまた、ユーザの指示で状態330に入るかもしれない。
【0040】
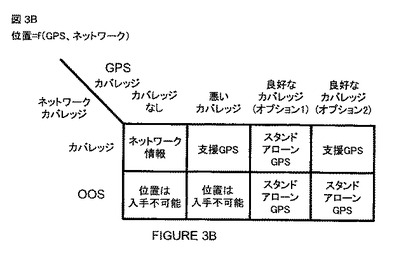
図3Bは、ネットワーク信号および/またはGPS信号の存在に基づいて、どのように移動局がロケーション位置を決定するかを示している。移動局は、衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいてポジションを決定する。衛星信号およびワイヤレスネットワーク信号の存在と品質とに応じて、移動局は、ポジション位置を決定するための方法を選択する。移動局は、ポジションを決定するためにモードのうちの1つを選択する。第1のモード(スタンドアローンGPSモード)では、移動局は、GPSシステムからの信号のみを使用する。第2のモード(支援GPSモード)では、移動局は、GPSシステムおよびワイヤレスネットワークの双方からの信号を使用する。第3のモード(ネットワーク情報モード)では、移動局は、ワイヤレスネットワークからの信号のみを使用する。移動局によって選択されたモードは、受信信号の、入手可能性と品質とに依存する。信号が入手不可能である場合には、移動局は、第4のモードで動作してもよく、第4のモードでは、ポジションの入力をユーザに促す。
【0041】
ここで、GPS信号について説明するが、GPS信号に加えて、または、GPS信号の代わりに、他のタイプのSPS信号を同様に使用してもよい。例えば、スタンドアローンGPS信号を使用することよりもむしろ、スタンドアローンGallieoモード、スタンドアローンGlasnosモード、または、2つ以上の異なるSPS信号を組み合わせたものを同等に使用してもよい。例えば、ポジションを決定する際に支援するために、GPS信号およびGlasnos信号の両方を捕捉および処理してもよい。
【0042】
移動局は、第1のしきい値を満たすGPS信号に基づいて、スタンドアローンGPSモードを選択してもよい。しきい値は、GPS信号の品質および/またはGPS信号の量に関連していてもよい。例えば、移動局は、最初に、良好なGPSカバレッジが入手可能であるか否かを決定する。例えば、それぞれ、有効な信号品質を有している、予め定められた数(例えば、3個、4個、5個、または6個)のGPS信号が移動局において入手可能である場合、移動局は、スタンドアローンGPS技術から、良好なGPSカバレッジと、基地局のポジション決定とを宣言できる。オプション1として示されているように、この従来のGPS技術は、強い信号状態で信頼性あるポジションを提供し得るので、他の技術を使用することは、不要であるかもしれない。悪い信号の状態では(例えば、高い建物または建物の木によって囲まれているとき、あるいは、建物の中で)、スタンドアローンGPSは信頼性が低くしか機能しない。さらに、悪い信号エリアでは、移動局40は、暦および天体暦データを衛星から受信することはできないかもしれない。
【0043】
移動局は、第1のしきい値よりも低い第2のしきい値を満たすGPS信号に基づいて、そしてネットワーク情報の入手可能性にさらに基づいて支援GPSモードを使用することを選択してもよい。利用可能なGPS衛星が悪い(例えば、衛星の数が少ない、および/または、所望の信号品質よりも低い)カバレッジしか提供しないが、移動局が基地局(BS)信号にアクセスできる場合には、移動局は、支援GPS(A−GPS)技術を使用して、または、基地局からの、セルまたはアクセスポイントの送信された識別子に基づいて、そのポジションを決定してもよい。A−GPSでは、移動局は、衛星からの暦および天体暦データを待つ、または、衛星からの暦および天体暦データを復調しようと試みるよりもむしろ、暦および天体暦データを基地局から受信するかもしれない。この支援データにより、移動局は、そのポジションを見つける際に、悪いGPS信号をより都合よく使用することができる。
【0044】
代替的に、オプション2として示されているように、移動局は、第1のしきい値を満たすGPS信号に基づいて、そしてネットワーク情報の入手可能性にさらに基づいて、支援GPSモードを選択してもよい。移動局が、良好なGPSカバレッジを有し、ネットワークカバレッジも有している場合、移動局は、場合によってはより迅速なポジション確定のために、支援GPSモードを使用してもよい。
【0045】
支援GPSモードでは、移動局は、GPS信号をより効率的に捕捉するために、支援データをネットワークから受信し、この支援データを使用してもよい。代替的に、または、さらに、移動局は、GPS信号を使用して第1のロケーションを、そしてネットワーク情報のみを使用して第2のロケーションを計算してもよい。(先に記述した)ネットワーク情報のみに基づいたロケーションは、1個、2個、3個、またはより多くの基地局のロケーションに基づいていてもよい。(例えば、不確実性に基づいて、2つのポジションに対して重み付けすることによって)第1および第2のロケーションを平均化して、移動局がその決定したロケーションとして使用してもよい第3のポジションを決定してもよい。代替的に、一連のロケーションを累積して、決定したロケーションを生成させてもよい。
【0046】
移動局は、第2のしきい値を満たさないGPS信号に基づいて、そしてネットワーク情報の入手可能性にさらに基づいて、ネットワーク情報モードを選択してもよい。GPS信号が入手不可能である(すなわち、移動局が、GPSカバレッジを有さないロケーションにある)場合、移動局は、そのロケーション位置を設定する際に、基地局信号から獲得したネットワーク情報のみを使用してもよい。ネットワーク情報モードでは、移動局は、ポジションを決定する際に、ネットワーク情報のみを使用する。例えば、移動局は、三辺測量または三角測量を使用してもよい。三辺測量は、基地局の相対的なポジションを、三角測量と類似した様式で決定する。角の測定値を(少なくとも1つの知られている距離とともに)使用して移動局のロケーションを計算する三角測量とは異なり、三辺測量は、これらの基地局のそれぞれと移動局との間の距離と、2つ以上の基地局のロケーションとを使用する。三辺測量を単独で使用して、2次元面上で移動局のロケーションを決定するために、一般的には、少なくとも3つの基地局のロケーションを使用するが、1つ、または、2つのみの基地局のロケーションを用いて、不確実性がより高いロケーションが計算されることがある。
【0047】
移動局は、GPS信号およびネットワーク信号の欠如に基づいて、オフラインモードを選択してもよい。GPS信号が入手不可能であり、移動局がサービス停止(OOS)エリア中にある場合、ロケーション位置は入手不可能である。このケースでは、画像にタグ付けするときに、移動局は、その最後の知られているロケーション位置を使用し、ユーザが位置を手動で提供することを許容してもよく、または代替的に、位置をブランクの状態にしてもよい。
【0048】
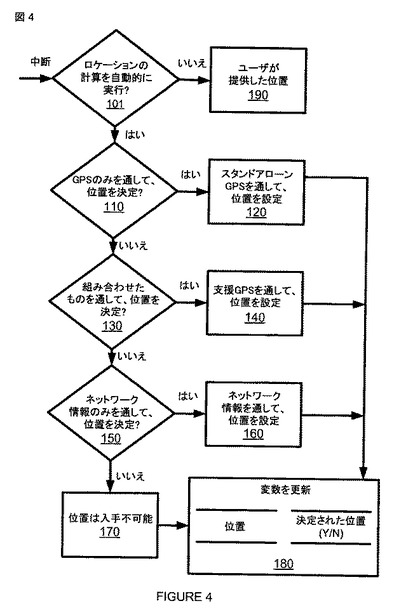
図4は、本発明のいくつかの実施形態にしたがった、ロケーション位置を設定するための手段を決定するフローチャートを示している。ステップ101では、ロケーション位置をユーザが手動で提供することを許容するか否かを決定するための、または、ロケーション計算を自動的に実行するか否かを決定するためのロケーション位置決定プロセスを、移動局が開始する。例えば、中断の結果として、ステップ101に入ってもよい。手動の場合には、190において処理が続く。自動の場合には、110において処理が続く。190において、ユーザは、位置、すなわちロケーション(例えば、経度および緯度、ストリートアドレス、テキスト記述)を提供する。
【0049】
110において、スタンドアローンGPSによるロケーション確定が可能であるか否かを、例えば、移動局が、良好なGPSカバレッジを有するか否か、または、現在の天体暦および暦情報を有するか否かを、移動局が決定する。そうである場合には、120において、移動局が、スタンドアローンGPSのみを通して、そのロケーション位置を決定および設定する。そうでない場合には、130において、移動局が、技術を組み合わせたものを使用してロケーション位置を決定できるか否かを決定する。例えば、GPSカバレッジは入手可能であるものの悪く、移動局が基地局と接続がある場合、移動局は140に続く。140において、移動局が、支援GPSを通して、そのロケーション位置を決定および設定する。例えば、移動局が、基地局を通して、ワイヤレスネットワークから支援データを最初に受信する。
【0050】
次に、移動局は、GPS信号を捕捉およびロケーション位置を決定するために、この支援データを使用する。GPSカバレッジが存在しない場合、移動局は150に進み、150において、移動局が、ネットワーク情報のみから基地局のロケーション位置を決定してもよい。すなわち、GPS信号が存在しないが、基地局を通した、ネットワークに対する接続が存在する場合、移動局は、粗ロケーション位置を提供するために、基地局から受信する情報を使用してもよい。160のように、移動局は、ネットワーク情報を通して、そのロケーションを決定および設定する。
【0051】
GPSカバレッジが存在せず、移動局がサービス停止(OOS)エリア中にある場合、移動局は170に進み、170において、位置は現在入手不可能であることを、移動局が決定する。いくつかの実施形態において、位置が入手不可能である場合、手動で位置を入力するようにユーザに問い合わせがされる。(120、140、または160から)ロケーション位置が入手可能である場合、あるいは、(170から)位置が入手不可能である場合、180において、移動局が、現在のロケーション位置を含む変数と、ロケーション位置が決定されていることを示しているフラグとを適切に更新してもよい。
【0052】
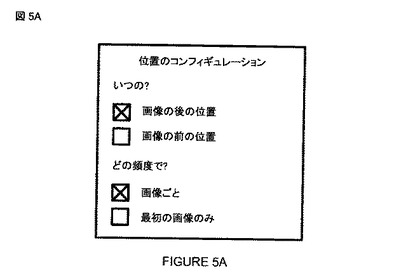
図5Aおよび図5Bは、本発明のいくつかの実施形態にしたがった、スクリーンショットを図示している。ユーザは、画像にタグ付けするために、どのロケーション位置を使用するかを決定してもよい。すなわち、ユーザは、1つ以上の画像を取り込むことに関連して、どの1つ以上のポジションが使用されるかを移動体デバイスに示す1つ以上のコンフィギュレーション可能なパラメータを設定してもよい。
【0053】
図5Aは、コンフィギュレーションスクリーンを示している。画像が取り込まれる前に、または、画像が取り込まれた後にロケーション位置が決定されるかを、ユーザは選択してもよい。第1のオプションでは、ユーザは、画像が取り込まれた後に決定されたロケーション位置を使用するように移動局に命令する。第2のオプションでは、ユーザは、画像が取り込まれる前に決定されたロケーション位置を使用するように移動局に命令する。(示していない)第3のオプションでは、ユーザは、入手可能な最適なロケーション位置を使用するように移動局に命令する(例えば、2つの位置−画像が取り込まれる前の位置、および、画像が取り込まれた後の位置―を決定して、画像の取り込みに時間的に最も近いロケーション位置を使用する)。ユーザは、どの頻度で新しいロケーション位置を画像にタグ付けするかも設定してもよい。例えば、ユーザは、その個々のロケーション位置を画像ごとに決定することを選択してもよい。代替的に、一連の取り込んだ画像における最初の画像に対してロケーション位置を決定することを、ユーザは選択してもよい。すなわち、最初に取り込まれた画像に対して、ロケーション位置を決定し、その後、後続する画像(例えば、最初の画像から、または、以前の画像から予め定められた秒数の画像)に、最初の取り込まれた画像に対して使用されたのと同じ決定されたロケーション位置がタグ付けされる。
【0054】
他の変数も、ユーザコンフィギュレーション可能であってもよく、または同様にシステムコンフィギュレーション可能であってもよい。例えば、ロケーションプロセスの中断から、画像取り込みプロセスを可能または不可能にするために、変数が設定またはクリアされてもよい(例えば、以下で図7Cを参照して説明する、画像を取り込む310、および、位置を決定100)。例えば、変数が設定された場合、画像を取り込もうと試行するユーザは、ロケーションプロセスを停止させる。変数がクリアされた場合、画像を取り込もうと試行しているユーザは、ロケーションプロセスか完了するまで待たされるだろう
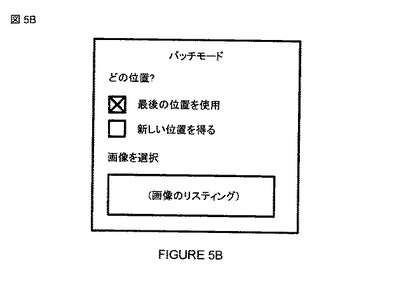
図5Bは、バッチモード中に使用されるスクリーンショットを示している。スクリーンショットは、オプションのリストと、画像のリスティングとを含む。示した画像のリスティングは、移動局内で入手可能な以前に取り込まれた画像のリストである。画像のリスティングは、ロケーション位置の品質(GPS位置、粗位置、位置なし)および/または画像が取り込まれた日付けおよび時間に基づいて、フィルタリングまたは順序付けしてもよい。例えば、タグ付けされていない画像のみを、リストアップしてもよいし、または代替的に、GPSロケーション位置がない画像のみをリストアップしてもよい。さらに、画像は、関係する属性のあるリストとして、または、縮小画像(サムネイル)として表示してもよい。
【0055】
バッチモードでは、ユーザは、一度に、多数の画像にタグ付けしてもよい。例えば、画像のリスティングから選択された1組の画像に、位置なしというタグが付けられている場合、ユーザは、ロケーション位置をこの1組の画像に設定するように命令してもよい。さらに、1組の画像に粗ロケーション位置のみがタグ付けされている場合、ユーザは、新しいロケーション位置を設定するように移動局に命令してもよい。第1のオプションでは、ユーザは、移動体デバイスにおいて入手可能な最後のロケーション位置を使用して、画像のリスティングからユーザが選択した1組の画像にタグ付けするように移動局に命令する。第2のオプションでは、ユーザは、新しいロケーション位置を得て、この新しいロケーション位置を、選択した1組の画像にタグ付けするように移動局に命令する。(示していない)第3のオプションでは、ユーザは、位置(例えば、ロケーションのテキスト記述、アドレス、GPS座標、またはこれらに類するもの)を手動で入力して、手動で入力した位置を、選択した1組の画像にタグ付けするように移動局に命令する。
【0056】
図6A、図6B、図6C、図6D、図7A、図7B、図7C、図8A、図8B、図8C、図9A、図9B、および図9Cは、本発明のいくつかの実施形態にしたがった、移動局に対する動作のさまざまな、通常モードおよび中断モードを図示している、時系列図およびフローチャートを示している。移動局は、画像を取り込むことと、ロケーション位置を決定することと、画像にタグ付けすることとの間でバランスを取る。図面は、移動局のカメラの4つの状態:カメラのアイドル状態200と、3つのアクティブ状態−画像取り込み状態210と、ロケーション位置決定状態220と、ポジションのタグ付け状態230と−を示している。カメラのアイドル状態220において、または同様に待機状態330において、それぞれ開始する。いったん移動局が電源投入され、ユーザ入力を待っていると、または代替的に、いったんカメラ(または他の記録デバイス)が電源投入され、ユーザ入力を待っていると、この状態に入るかもしれない。
【0057】
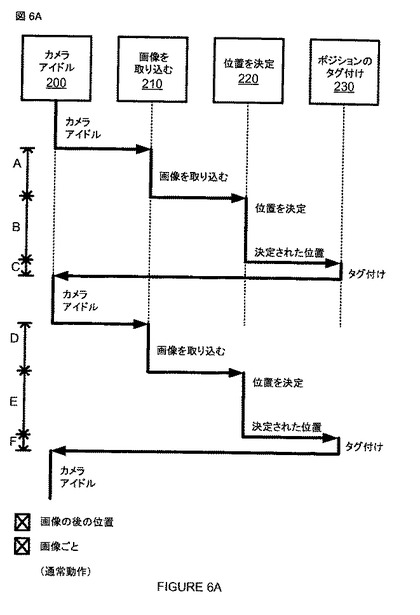
図6A、図6B、図6C、および図6Dは、画像が取り込まれた後に画像ごとにロケーション位置を獲得するように移動局がコンフィギュレーションされている例を示している。図6Aに示したように、ユーザが画像取り込みを開始したとき、移動局はカメラアイドル状態200を出て、これにより、状態210に入る。期間「A」の間に、画像が取り込まれる。いったん画像取り込みが完了すると、移動局は、状態220に入ることによって、ロケーション位置の決定を開始する。図3Bを参照して上述したように、移動局は、良好なGPS信号、悪いGPS信号、または存在しないGPS信号の入手可能性とともに、基地局信号の入手可能性、すなわちサービス停止(OOS)エリア中にあるかを組み合わせたものに基づいてロケーション位置を決定する。移動局は、時間の期間「B」にわたって、ロケーション位置を決定するように動作する。いったんロケーション位置を決定すると、移動局は、状態230に入ることによって、決定したロケーション位置を画像にタグ付けし、移動局がアイドル状態200に戻るまで、大変短い時間の量「C」しかかからない。(「D」における)2番目の画像の取り込みに続いて、(「E」における)新しいポジション決定が続き、最後に(「F」において)画像にタグ付けする後続するユーザアクションにより、このプロセスは繰り返す。
【0058】
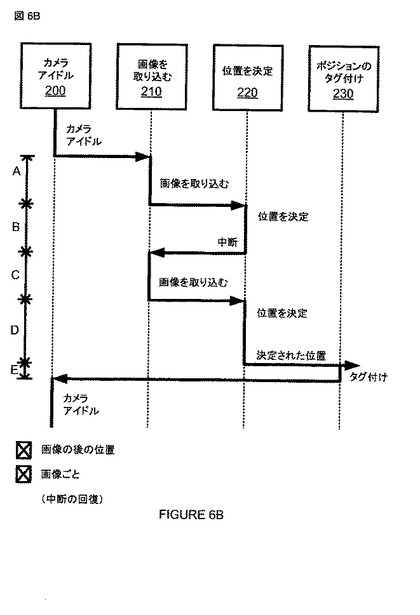
図6Bは、画像のシーケンスを取り込む移動局を示している。アイドル状態200から、移動局は、期間「A」の間に画像取り込み(状態210)を開始する。いったん画像が取り込まれると、移動局が、期間「B」にわたって、ロケーション位置を決定する(状態220)。この例では、ロケーション位置が決定される前に、ユーザが、2番目の画像取り込みを開始することによって、ロケーション位置決定プロセスを中断する(再入状態210)。「C」の間に、2番目の画像が取り込まれる。次に、移動局は、状態220に再び入り、期間「D」の間に、ロケーション位置の決定を完了する。いったんロケーション位置を決定すると、期間「E」の間に、ちょうど取り込まれた2つの前の画像に、決定したロケーション位置がタグ付けされる。いったん画像がタグ付けされると、カメラは、カメラのアイドル状態220に戻る。
【0059】
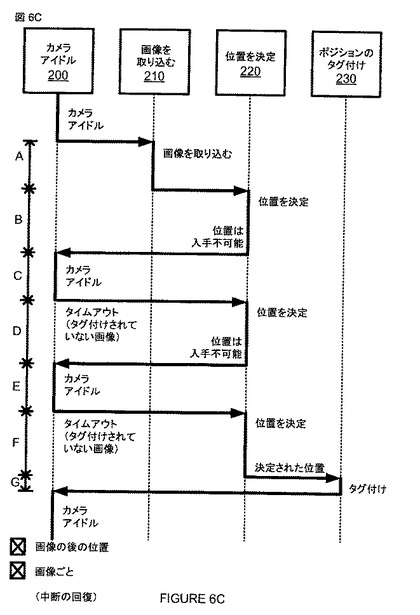
図6Cは、画像を取り込むことに続いて、ロケーション位置を決定しようとする一連の試行を示している。「A」において、移動局は、アイドル状態200のままであり、画像を取り込む状態210に入る。「B」において、例えば、移動局が、GPSカバレッジのないOOSエリア中にある場合、移動局は、位置を決定しようと試行するが、不成功に終わる。移動局は、予め定められた値でタイマを設定し、Cの期間の間に、アイドル状態200に再び入る。「D」において、タイマがタイムアウトし、移動局が、ロケーション位置を決定する第2の時間を試行する。再び、この例では、位置は入手不可能である。移動局は、アイドル状態200における「E」の期間の間、再び、タイマを設定して待機する。「F」においてもう一度、タイマがタイムアウトすると、移動局は、ロケーション位置決定状態220に再び入る。この例では、ロケーション位置を決定する。「G」において、移動局は状態230に入り、より早く取り込まれた画像にタグ付けすることに進む。最後に、移動局は、アイドル状態200に戻る。
【0060】
図6Dは、画像が取り込まれた後に、ロケーション位置を画像ごとに獲得するようにコンフィギュレーションされている移動局に対するイベントおよびアクションを要約しているフロー図を示している。(アイドル状態200に相当する)待機状態300において、フローが開始してもよい。ユーザが画像の取り込みを開始する場合、移動局は状態300を出てもよい。代替的に、ユーザがカメラモードを使用可能にした場合、移動局は状態300を出てもよい。さらに、タイムアウトが生じた場合、移動局は、状態300を出てもよい。状態310において、移動局が、画像または画像の緊密なシーケンスの取り込みを開始する。いったん最後の画像が取り込まれると、移動局は状態310を出て、ロケーション位置決定プロセスを開始するために状態100に入ってもよい。状態310に入ったが、画像が取り込まれなかった場合、移動局は、タイムアウトし、状態300において待機するために戻ってもよい。状態100において、移動局が、ロケーション位置を決定するプロセスを開始する。ロケーション位置が決定された場合(これにより、状態330に入る)、位置が入手不可能である場合(これにより、タイマを設定し、待機状態300に戻る)、または状態310における画像取り込みプロセスをユーザが開始することによって中断が生じた場合、移動局は状態100を出る。状態330において、移動局は、タグ付けされていない取り込まれた画像(または画像のシーケンス)にタグ付けし、待機状態300に戻る。
【0061】
図7A、図7B、および図7Cは、画像が取り込まれる前に、画像ごとに獲得されたロケーション位置を使用するように移動局がコンフィギュレーションされている例を示している。
【0062】
図7Aでは、「A」において、移動局が、アイドル状態200を出て、ロケーション位置を決定する状態220に入り、その位置を決定し、決定した位置をメモリに保存する。タイマの期限が切れたときに、現在のロケーション位置が新しいロケーション位置にリフレッシュされるように、移動局は期限切れタイマを設定してもよい。例えば、期限切れタイマは、予め定められた時間の期間(例えば、5分、10分、15分、20分、25分、30分、45分、または60分)に設定してもよい。このような方法で、移動局は、将来のタイムスタンプ付けのために、正確なロケーション位置、または、ほとんど正確なロケーション位置を有する。期限切れタイマが設定された後、移動局は、アイドル状態200に再び入る。少ししてから、または、予め定められた時間の後に、ユーザは、移動局が、画像を取り込む状態210に入るようにさせる。移動局は、メモリに保存された有効なロケーション位置をすでに有しているので、画像は、状態230における期間「C」の間に、すぐにタグ付けされるかもしれない。いったんタグ付けされると、移動局は、アイドル状態200に再び入ってもよい。この例では、期限切れタイマの期限は、切れており、現在のロケーション位置がリフレッシュされるべきであることを示している。「D」の間に、移動局は状態220に入り、新しいロケーション位置を決定し、以前のロケーション位置を置換して、決定したロケーション位置をメモリに保存する。このコンフィギュレーションでは、ロケーション位置を取得したものの、必ずしも使用しなくてもよい。ロケーション位置を使用する場合には、ロケーション位置を決定した後に取り込まれた画像に対して使用する。
【0063】
図7Bは、ユーザが画像を取り込むことによってポジション決定プロセスが中断されるイベントのシーケンスを示している。「A」において、移動局は、ロケーション位置決定を開始するために状態220に入る。ユーザは、(状態210における「B」において)最初の画像を取り込み始めることによって、このプロセスを中断する。いったん画像取り込みが完了すると、移動局は、ロケーション位置決定プロセスを続けるために状態220に再び入る。この例は、ユーザが、画像を取り込む状態210に再び入ることによって、このプロセスの第2の中断を示している。いったん完了すると、再び、移動局は、(状態220における「E」において)ロケーション位置特定プロセスを続ける。最後に、プロセスは、ロケーション位置を決定し、(状態230における「F」において)以前に取り込まれたタグ付けされていない画像にタグ付けする。移動局は、その後、アイドル状態200に戻る。
【0064】
図7Cは、画像が取り込まれる前に、画像ごとにロケーション位置を獲得するようにコンフィギュレーションされている移動局に対するイベントおよびアクションを要約しているフロー図を示している。画像が取り込まれる前に獲得されるロケーション位置を使用するように移動局がコンフィギュレーションされているときに、処理は、ロケーション位置を決定する状態110により開始する。プロセスがロケーション位置を決定した場合(これにより、待機状態300に出る)、または、中断が生じた場合(これにより、状態310に出る)、例えば、ユーザが画像を取り込もうと試すことによって、移動局は状態100を出てもよい。状態300において、移動局が、ユーザアクションまたはタイムアウトを待っている。ユーザが画像の取り込みを開始した場合、移動局は、状態310に進む。移動局が、画像を取り込み、ロケーション位置が入手可能である場合、移動局は、画像にタグ付けする状態330に進む。一方、画像は取り込まれたが、位置は入手不可能である場合、移動局は、ロケーション位置を決定する状態100に戻る。予め定められたタイムアウト期間の後、画像が取り込まれなかった場合、ロケーション位置を必要とする場合には、移動局は、タイムアウトし、(状態100において)ロケーション位置を決定するために戻ってもよく、あるいは、位置が不要である場合には、タイムアウトし、(状態300において)待機するために戻ってもよい。いったんロケーション位置が古くなり、リフレッシュされる必要があると、または、時間の予め定められた期間に対して位置が入手不可能である場合に状態300は、タイムアウトするようにコンフィギュレーションされてもよい。このリフレッシュタイマの期限が切れたときに、移動局は、状態100において新しいロケーション位置を決定するために状態300を出る。いったん新しいロケーション位置が決定されると、移動局は、状態100を出て、まったくタグ付けされていない画像にタグ付けするために状態330に入ってもよい。
【0065】
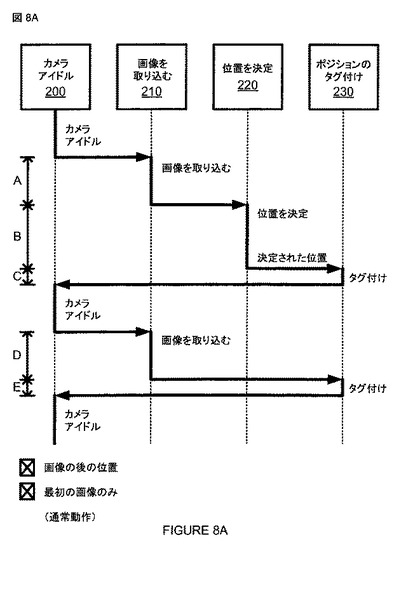
図8A、図8B、および図8Cは、画像のシーケンス中の最初の画像が取り込まれた後に、ロケーション位置を獲得するように、そして画像のシーケンスのそれぞれに対して同じロケーション位置を使用するように移動局がコンフィギュレーションされている例を示している。以前の画像の前の、予め定められた時間の期間内にそれぞれの画像が取り込まれ始めたことに基づいて、画像のグループは画像のシーケンスであると決定してもよい。例えば、シーケンス中の画像は、すぐに先行する画像から、30秒、1分、2分、3分、4分、5分、または、他の何らかの予め定められた時間の期間で取り込まれる。代替的に、シーケンス中の画像は、予め定められた時間ウィンドウ内に取り込まれる。例えば、シーケンス中の画像は、最初の画像から、5分、10分、15分、または30分のウィンドウ内に取り込まれる。代替的に、シーケンスを終了するように移動局にユーザが命令するまで、画像のシーケンスは続いてもよい。
【0066】
図8Aは、同じロケーション位置がタグ付けされている取り込まれた画像のシーケンスを示している。「A」において、ユーザが、状態210で最初の画像を取り込む。「B」における、最初の画像の取り込みに続いて、状態220でロケーション位置を決定する。「C」において、決定したロケーション位置を使用して、最初の画像に状態230でタグ付けする。移動局は、アイドル状態200に戻る。「D」において、移動局が、2番目の画像を状態210で取り込む。状態200で新しいロケーション位置を決定する代わりに、以前に決定したロケーション位置を使用して、状態230で、2番目の画像にタグ付けする。シーケンス中の後続する画像は、状態210で同様に取り込まれて、状態230でタグ付けされる。決定したロケーション位置は、リフレッシュされたポジションロケーション位置に将来置換され、後続する画像のシーケンスに使用してもよい。
【0067】
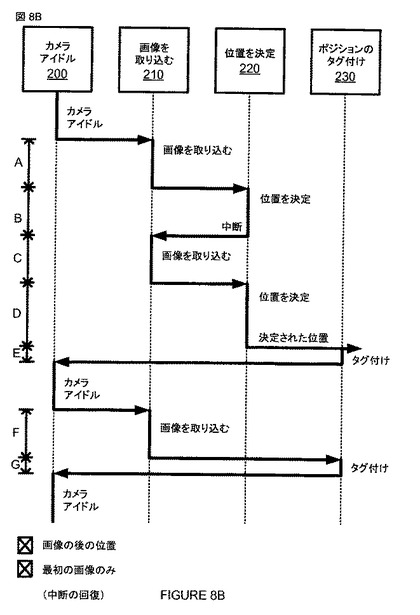
図8Bは、ユーザが画像を取り込むことによって、ポジション決定プロセスが中断されるイベントのシーケンスを示している。「A」において、移動局が、最初の画像を取り込むために状態210に入る。「B」において、移動局が、ロケーション位置決定を開始するために状態220に入る。ユーザは、(状態210における「C」において)2番目の画像の取り込みを開始することによってこのプロセスを中断する。いったん画像取り込みが完了すると、移動局は、(「D」において)ロケーション位置決定プロセスを続けるために状態220に再び入る。いったん移動局が、新しいロケーション位置を決定して、メモリに保存すると、移動局は、(状態230における「E」において)、以前に取り込まれた2つのタグ付けされていない画像にタグ付けする。その後、移動局は、アイドル状態200に戻る。(状態210における「F」において)ユーザが3番目の画像を取り込むことにより、画像のシーケンスは続く。3番目の画像も、(状態230における「G」において)同じロケーション位置がタグ付けされる。画像のシーケンスが終了するまで、同じロケーション位置が使用される。最終的に、保存されたロケーション位置は、リフレッシュされて更新されたロケーション位置と置換してもよい。
【0068】
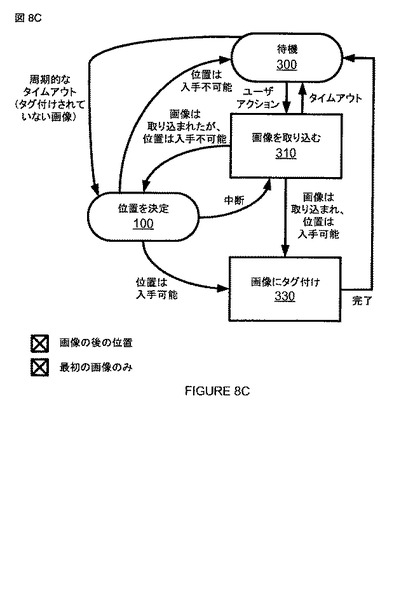
図8Cは、画像のシーケンス中の最初の画像が取り込まれた後に、ロケーション位置を獲得するように、そして画像のシーケンスのそれぞれに対して同じロケーション位置を使用するようにコンフィギュレーションされている移動局に対するイベントおよびアクションを要約しているフロー図を示している。移動局が待機状態300にあることで、フローは開始する。ユーザアクションは、移動局が、画像取り込み状態310に入るようにさせる。画像が取り込まれ、位置が入手不可能である場合、移動局は、ロケーション位置を決定する状態100に入る。画像が取り込まれて、(例えば、写真のシーケンス中の以前の写真から結果的に得られる)ロケーション位置が利用可能である場合、移動局は、画像にタグ付けする状態330に入る。画像が取り込まれなかった場合、移動局はタイムアウトし、待機状態300に戻ってもよい。いったん画像がタグ付けされると、移動局は待機状態300に戻る。状態100においてロケーション位置を決定するプロセスの間に、移動局が、ロケーション位置を決定して、1つ以上の画像にタグ付けするために状態330に入ってもよく、ユーザが別の画像を取り込むことによってプロセスが中断され、状態310に入ってもよく、または、ロケーション位置を取得することができず、待機状態300に戻るかもしれない。状態300において待機している間、移動局は、周期的にタイムアウトし、タグ付けされていない画像に対するロケーション位置を取得しようと試行してもよい。タグ付けされていない画像に自動的にタグ付けするときに、その試行を最終的に放棄するまで、予め定められた時間の期間にわたって、移動局は、周期的にタイムアウトしてもよい。
【0069】
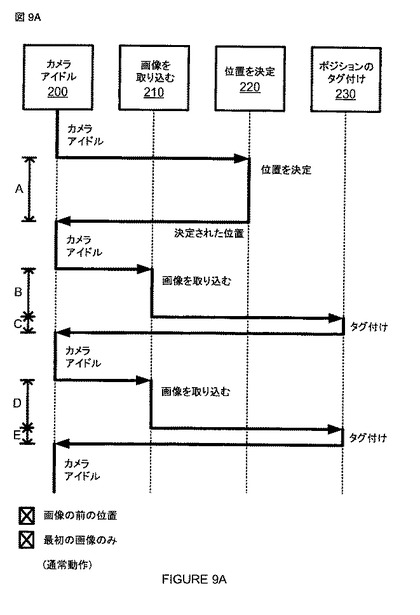
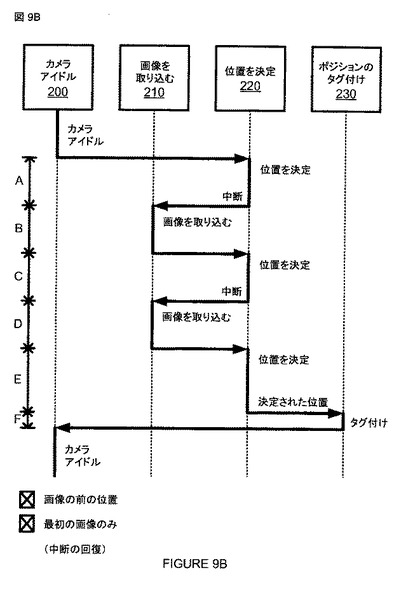
図9A、図9B、および図9Cは、画像のシーケンス中の最初の画像が取り込まれる前に獲得されたロケーション位置を使用するように、そして、画像のシーケンスのそれぞれに対して同じロケーション位置を使用するように、移動局がコンフィギュレーションされている例を示している。
【0070】
図9Aは、画像のシーケンスを取り込み、同じ予め決定されたロケーション位置をこれらの画像にタグ付けするプロセスを示している。「A」において、最初の画像が取り込まれる前にロケーション位置を決定することで、処理が始まる。いったんロケーション位置が決定されると、移動局は、待機状態200に入る。「B」において、ユーザが、状態210で最初の画像を取り込み、移動局が、状態230における「C」においてタグ付けし、待機状態200に戻る。このプロセスは、シーケンス中の画像ごとに繰り返してもよい。例えば、「D」において、ユーザが2番目の画像を状態210で取り込み、移動局が、「E」における状態230においてタグ付けし、待機状態200に戻る。
【0071】
図9Bは、ロケーション位置が決定される前に画像を取り込むために、決定プロセスを中断する移動局を示している。「A」において、移動局が、状態220でロケーション位置の決定を開始する。(「B」において)移動局が、状態210で最初の画像を取り込むために状態220を中断し、(「C」において)状態220でロケーション位置を決定するために戻る。再び、(「D」において)移動局は、状態220で、2番目の画像を取り込むために、ロケーション位置決定プロセスを中断する。この例では、2番目の画像が取り込まれた後、(「E」において)移動局は、状態220で、ロケーション位置を決定するそのプロセスを完了する。(「F」において)移動局は、2つのタグ付けされていない画像にタグ付けして、アイドル状態200に戻る。
【0072】
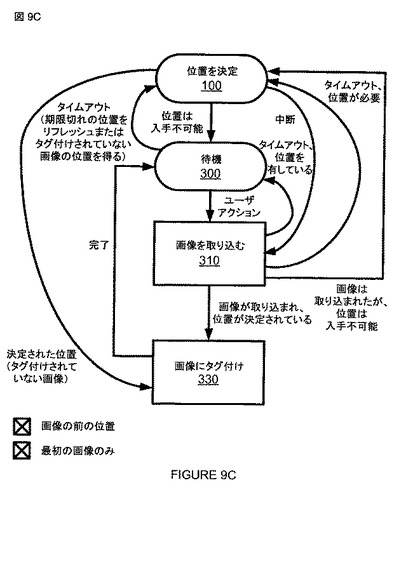
図9Cは、画像のシーケンス中の最初の画像が取り込まれる前に獲得されたロケーション位置を使用するように、そして、画像のシーケンスのそれぞれに対して同じロケーション位置を使用するようにコンフィギュレーションされている移動局に対するイベントおよびアクションを要約しているフロー図を示している。処理は、ロケーション位置を決定する状態100において開始する。いったんロケーション位置が状態100において決定されると、移動局は、決定したロケーション位置をメモリに対して保存し、待機状態300に入るか、または、タグ付けされていない画像にタグ付けするために状態330に入る。代替的に、位置が入手不可能である場合、移動局は、将来の予め定められた時間の期間において決定を試行するために、タイマを設定し、待機状態200に入る。決定プロセスの間、ユーザアクションは、移動局が、決定プロセスを中断して、画像を取り込む状態310に入るようにさせてもよい。画像が取り込まれ、ロケーション位置がすでに決定されている場合(これにより、状態330に入る)、画像は取り込まれたが、位置はまだ入手不可能である場合(これにより、状態100に入る)、移動局は、画像を取り込むための待機をタイムアウトするが、画像は取り込まれず、ロケーション位置がすでに保存されている場合(これにより、状態300に入る)、そして、移動局は、画像を取り込むための待機をタイムアウトするが、画像は取り込まれず、位置が保存されていない場合(これにより、状態100に入る)、移動局は状態310を出てもよい。いったん、タグ付けされていない画像が状態330においてタグ付けされると、移動局は、待機状態300に戻る。状態300において待機している間、移動局は、タイムアウトし、状態100に再び入ってもよい。例えば、移動局は、以前に保存されたロケーション位置をリフレッシュするためにタイムアウトしてもよい。1つ以上の取り込まれた画像がタグ付けされておらず、予め定められた時間の期間がまだ過ぎていない場合にも、移動局はタイムアウトすることがあり、これにより、移動局は、別の試行および位置特定を行うことができる。
【0073】
上述したいくつかのコンフィギュレーションは、画像が取り込まれる前に決定されたポジションを移動局が1つ以上の画像にタグ付けすることを提供する。上述したいくつかのコンフィギュレーションは、画像が取り込まれた後に決定されたポジションを移動局が1つ以上の画像にタグ付けすることを提供する。移動局は、画像にタグ付けするために、2つの異なるポジション間で選択を行ってもよい。例えば、移動局は、最後の入手可能なロケーション位置を画像にタグ付けしてもよい。最後のロケーション位置から、画像が取り込まれた時間までの、時間の期間(TIME_PREVIOUS_FIX)を記録してもよい。移動局は、後に、更新されたロケーション位置を決定してもよい。取り込まれた画像から、更新されたロケーション位置までの、時間の期間(TIME_FIX_NEXT)も記録してもよい。この次の期間(TIME_FIX_NEXT)が、以前の期間(TIME_PREVIOUS_FIX)よりも短い場合、移動局は、以前のタグを、この更新されたロケーション位置と置換してもよい。代替的な実施形態では、画像取り込みの時間がロケーション位置の2つの時間の間にある場合、画像取り込みの時間を使用して、2つの連続的なロケーション位置間のロケーションを補間することができる。
【0074】
今説明したように、いくつかの実施形態では、以前に決定されたロケーションが、画像が取り込まれた後に決定されたロケーション位置が、または、2つのロケーション位置の良好な方が、最初の画像にタグ付けされる。いくつかの実施形態では、最初の画像だけに一意的なロケーション位置をタグ付けするモードに入るか否かを、移動局は決定する。例えば、複数の画像を互いから短い時間の量内に取得するスポーツモードでは、移動局は、同じロケーション位置を、取得した画像のすべてに適用してもよい。
【0075】
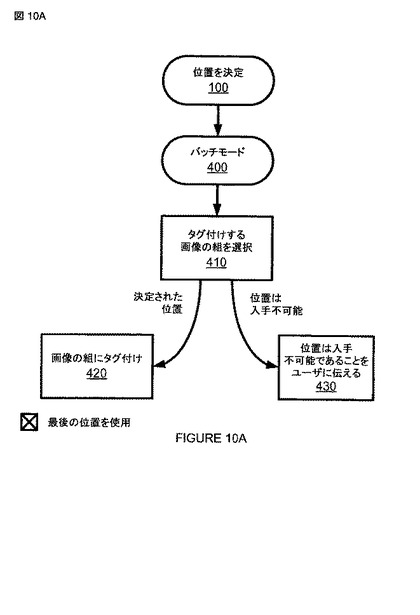
図10Aおよび図10Bは、本発明のいくつかの実施形態にしたがった、画像にタグ付けするプロセスフローを示している。図10Aは、画像にタグ付けするバッチモードを示しており、ここでは、最後のロケーション位置を使用するように移動局がコンフィギュレーションされている。100において、移動局が、ロケーション位置を決定する。いつか将来の時間において、ユーザは、バッチモード400に入る。バッチモードでは、ユーザは、図5Bで示したような「最後のロケーション位置を使用する」オプションを選択してもよい。移動局は、タグ付けする画像のリスト(例えば、最後の組のタグ付けされていない画像、すべてのタグ付けされていない画像、またはこれらに類するもの)を示す。410において、ユーザは、最後に決定したロケーション位置がタグ付けされることになる1組の画像を選択する。420において、ロケーション位置が、以前に決定されてメモリに保存されていた場合、移動体は、メモリ中に保存されている最後に決定されたロケーション位置をそれぞれの画像にタグ付けする。430において、メモリ中で位置が入手不可能である場合、位置は入手不可能であることを、移動局はユーザに知らせる。代替的に、このようなロケーション位置がメモリ中に存在しないときに、「最後の位置を使用」オプションによる1組の画像にタグ付けするオプションは、このオプションをグレーアウトするように、ユーザに対する表示を変更してもよく、これにより、このオプションは選択不可能になる。
【0076】
代替的に、位置、すなわち地理的インジケータを提供するようにユーザが問い合わせされることがある。例えば、位置が入手不可能である場合、画像が取り込まれたロケーションを記載するようにユーザは入力を促されることがあり(例えば、ユーザは、「Wat Ayuthayya」入力すると、デバイスは、1組の画像に、このテキストをタグ付けすることができる)、これにより、その後、後処理および逆ジオコーディングが可能になるだろう。将来のある時点で、それぞれの画像からのこのテキストは、サーバにポート出力され、このサーバは、ユーザが入力したテキストを、等価GPS決定位置に整合させて変換する。その後、ユーザが入力したテキストに加えて、または、ユーザが入力したテキストの代わりに、画像に位置をタグ付けすることができる。
【0077】
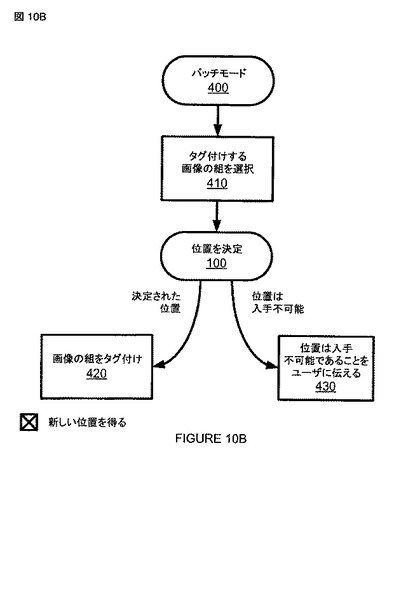
図10Bは、画像にタグ付けするバッチモードを示しており、新しいロケーション位置を得るように移動局がコンフィギュレーションされている。400において、ユーザが、バッチモード400に入る。バッチモードでは、ユーザは、図5Bに示したような「新しい位置を得る」オプションを選択してもよい。410において、ユーザは、次に決定されるロケーション位置がタグ付けされることになる1組の画像を選択する。100において、移動局が、ロケーション位置を決定する。420において、ロケーション位置が決定された場合、移動体は、この決定されたロケーション位置をそれぞれの画像にタグ付けする。430において、位置を決定できなかった場合、移動局は、位置は入手不可能であることをユーザに通知する。
【0078】
したがって、本発明は、特許請求の範囲の精神および範囲内での改良および変更により実施できることを、理解すべきである。記述は、網羅的であることを意図せず、または、開示した正確な形態に本発明を限定することを意図していない。本発明は、改良および変更により実施できることを理解すべきである。
【関連技術の相互参照】
【0001】
該当なし。
【発明の背景】
【0002】
発明の分野
本発明は、一般的に、位置特定に関し、さらに詳細には、GPS使用可能移動局記録デバイスにおいてロケーション位置を画像にタグ付けすることに関する。
【0003】
発明の背景
写真を位置特定するマッピングシステムの人気が高まり続けることで、信頼できて、強固で、迅速で、正確な位置特定をカメラの機能とともに自動的に結び付ける、より多くの製品を消費者は望むだろう。知られているGPS使用可能カメラは、それぞれの写真が取り込まれた後にロケーション位置を決定する。これらのデバイスは、独立して動作する。すなわち、カメラは日付タイムスタンプを提供し、そして、GPSデバイスは、スタンドアローンGPSを使用して、日付および時間とともにロケーションのログを取る。後続する処理は、2組のデータをPC上でバッチ処理して、共通のタイムスタンプに基づいて写真をロケーションと組み合わせる。GPS使用可能カメラを使用してロケーション位置を決定する際の遅延が、大幅であることがある。さらに、GPS使用可能カメラは、そのユーザのニーズに最も合うようにユーザによってコンフィギュレーション可能ではなく、そして、位置特定を支援するために、ワイヤレスネットワークから取得したデータを使用しない。音声およびデータコールを行うためにワイヤレスネットワークを使用するGPS使用可能移動局もまた、より一般的になっている。FCCの911指令を満たすように、そして移動体のアプリケーションとユーザ対話とに対して拡張した機能性を提供するように、このようなGPS使用可能移動局を採用している。このようなカメラおよび移動局は、衛星のGPSネットワークとワイヤレスネットワークとの組み合わせた特徴を組み込んでおらず、画像を取り込むときにこの機能を利用しない。したがって、画像を取り込むときに使用する、これらの欠点のうちの1つ以上の欠点もない、よりフレキシブルで強固で位置特定システムが存在する必要がある。
【0004】
概要
本発明のいくつかの実施形態は、カメラを具備するデバイス中で画像に地理的タグ付けする方法を提供する。方法は、画像を取り込むことと;衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定することと;決定したポジションを画像にタグ付けすることとを含む。
【0005】
本発明のいくつかの実施形態は、カメラを具備するデバイス中で画像に地理的スタンプ付けする方法を提供する。方法は、衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定することと;ポジションを決定する動作の後に、画像を取り込むことと;決定したポジションを画像にタグ付けすることとを含む。
【0006】
本発明のいくつかの実施形態は、カメラを具備するデバイス中で画像のバッチを地理的スタンプ付けする方法を提供する。方法は、複数の画像を取り込むことと;複数の画像を選択することと;衛星信号の検出と、ワイヤレスネットワーク信号の検出とに基づいて、ポジションを決定することと;決定したポジションを複数の画像にタグ付けすることとを含む。
【0007】
本発明のいくつかの実施形態は、カメラを具備し、画像に地理的タグ付けするデバイス提供する。デバイスは、画像を取り込む手段と;衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段と;決定したポジションを画像にタグ付けする手段とを具備する。
【0008】
本発明のいくつかの実施形態は、カメラを具備し、画像のバッチを地理的スタンプ付けするデバイスを提供する。デバイスは、複数の画像を取り込む手段と;複数の画像を選択する手段と;衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段と;決定したポジションを複数の画像にタグ付けする手段とを具備する。
【0009】
本発明のいくつかの実施形態は、コンピュータ読み取り可能媒体を具備するコンピュータ読み取り可能プロダクトを提供する。コンピュータ読み取り可能媒体は、少なくとも1つのコンピュータに実行させるためのコードと、画像を取り込むように少なくとも1つのコンピュータに実行させるためのコードと;衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定するように少なくとも1つのコンピュータに実行させるためのコードと;決定したポジションを画像にタグ付けするように少なくとも1つのコンピュータに実行させるためのコードとを含む。
【0010】
本発明のいくつかの実施形態は、コンピュータ読み取り可能媒体を具備するコンピュータ読み取り可能プロダクトを提供する。コンピュータ読み取り可能媒体は、複数の画像を取り込むように少なくとも1つのコンピュータに実行させるためのコードと、複数の画像を選択するように少なくとも1つのコンピュータに実行させるためのコードと、衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定するように少なくとも1つのコンピュータに実行させるためのコードと、決定したポジションを複数の画像にタグ付けするように少なくとも1つのコンピュータに実行させるためのコードとを含む。
【0011】
本発明の、これらおよび他の様態、特徴、および利点は、以下で記述する実施形態に対する参照から明らかになるだろう。
【図面の簡単な説明】
【0012】
図面を参照して、ほんの一例として、本発明の実施形態を記述する。
【図1A】図1Aは、信号を移動局に提供する衛星ビークルを示している。
【図1B】図1Bは、ロケーション位置を画像にタグ付けするプロセスを示している。
【図2】図2は、ワイヤレスネットワークおよび衛星ビークルと通信している移動局を示している。
【図3A】図3Aは、本発明のいくつかの実施形態にしたがった、状態図を示している。
【図3B】図3Bは、本発明のいくつかの実施形態にしたがった、真偽表を示している。
【図4】図4は、本発明のいくつかの実施形態にしたがった、ロケーション位置を設定する手段を決定するフローチャートを示している。
【図5A】図5Aは、本発明のいくつかの実施形態にしたがった、スクリーンショットを図示している。
【図5B】図5Bは、本発明のいくつかの実施形態にしたがった、スクリーンショットを図示している。
【図6A】図6Aは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図6B】図6Bは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図6C】図6Cは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図6D】図6Dは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示しているフローチャートを示している。
【図7A】図7Aは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図7B】図7Bは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図7C】図7Cは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示しているフローチャートを示している。
【図8A】図8Aは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図8B】図8Bは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図8C】図8Cは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示しているフローチャートを示している。
【図9A】図9Aは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図9B】図9Bは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示している時系列図を示している。
【図9C】図9Cは、本発明のいくつかの実施形態にしたがった、移動局の通常の動作を図示しているフローチャートを示している。
【図10A】図10Aは、本発明のいくつかの実施形態にしたがった、画像にタグ付けするプロセスフローを示している。
【図10B】図10Bは、本発明のいくつかの実施形態にしたがった、画像にタグ付けするプロセスフローを示している。
【本発明の詳細な説明】
【0013】
以下の記述では、本発明のいくつかの実施形態を図示している図面に対して、参照を行う。他の実施形態を利用してもよく、機械的、構成的、構造的、電気的、動作的変更を、本開示の精神および範囲から逸脱せずに行ってもよいことを理解する。以下の詳細な説明は、限定的に解釈すべきものではない。さらに、後続する詳細な説明のいくつかの部分は、電子回路中で、または、コンピュータメモリ上で実行できるデータビットに関する動作の、手順や、ステップや、論理ブロックや、処理や、他の記号的な表現の観点で示している。手順や、コンピュータ実行されるステップや、論理ブロックや、プロセス等は、所望の結果に導くステップまたは命令の首尾一貫したシーケンスであると、ここでは考える。ステップは、物理量の物理的操作を利用するステップである。これらの量は、記憶したり、転送したり、合成したり、比較したり、そうでなければ電子回路中でまたはコンピュータシステム中で操作したりすることができる、電気、磁気、または無線信号の形態をとることができる。これらの信号を、時には、ビット、値、エレメント、シンボル、キャラクタ、ターム、数と呼ぶことがあり、またはこれらの類するもので呼ぶことがある。それぞれのステップは、ハードウェア、ソフトウェア、ファームウェア、またはこれらの組み合わせによって実行してもよい。ハードウェアインプリメンテーションでは、例えば、処理ユニットは、1つ以上の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSP)、プログラマブルロジックデバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、制御装置、マイクロ制御装置、マイクロプロセッサ、電子デバイス、ここで記述した機能を実行するように設計されている他のデバイスユニット、および/またはこれらを組み合わせたもの内で実現してもよい。
【0014】
この明細書全体を通して、「1つの例」、「1つの特徴」、「例」、または「特徴」に対してなされる参照は、特徴および/または例に関連して記述する、特定の特徴、構成、または特徴は、主張する主題事項のうちの少なくとも1つの特徴および/または例に含まれることを意味する。したがって、この明細書全体を通したさまざまな場所におけるフレーズ「1つの例において」、「例」、「1つの特徴において」、または「特徴」の登場は、必ずしも、すべてが同じ特徴および/または例に言及しているわけではない。さらに、特定の、特徴、構成、または特性を、1つ以上の例および/または特徴に組み合わせてもよい。
【0015】
ここで言及する「命令」は、1つ以上の論理動作を表す表現に関連している。例えば、命令は、1つ以上のデータオブジェクト上で1つ以上の動作を実行する機械によりインタープリタ可能であることによって、「機械読み取り可能」である。しかしながら、これは、単なる命令の例であり、主張する主題事項はこの観点に限定されない。別の例では、ここで言及する命令は、エンコードされたコマンドを含むコマンドセットを有する処理回路によって実行可能であるエンコードされたコマンドに関連していることがある。このような命令は、処理回路によって理解される機械言語の形態でエンコードされてもよい。さらに、これらは、単なる命令の例であり、主張する主題事項は、この観点で限定されない。
【0016】
ここで言及する「記憶媒体」は、1つ以上の機械によって認識可能である表現を維持することができる媒体に関連している。例えば、記憶媒体は、機械読み取り可能な命令および/または情報を記憶する1つ以上の記憶デバイスを含んでいてもよい。このような記憶デバイスは、例えば、磁気、光学、または半導体記憶媒体を含むいくつかの媒体のタイプのうちの任意のものを含んでいてもよい。このような記憶デバイスは、長期間、短期間、揮発性または不揮発性メモリデバイスの何らかのタイプも含んでいてもよい。しかしながら、これらは、記憶媒体の単なる例であり、主張する主題事項はこれらの観点に限定されない。
【0017】
特に述べられていない限り、以下の説明から明らかであるように、「処理する」、「計算する」、「算出する」、「選択する」、「形成する」、「使用可能にする」、「阻止する」、「位置付ける」、「終了する」、「識別する」、「開始する」、「検出する」、「取得する」、「ホスト処理する」、「維持する」、「表す」、「推定する」、「受信する」、「送信する」、「決定する」、および/またはこれらに類するもののような用語を利用しての、この明細書全体を通した説明は、コンピュータまたは類似した電子コンピューティングデバイスのようなコンピューティングプラットフォームによって実行されてもよいアクションおよび/またはプロセスに、そして、コンピューティングプラットフォームのプロセッサ、メモリ、レジスタ、および/または他の情報記憶装置、送信デバイス、受信デバイス、および/またはディスプレイデバイス内の物理電子および/または磁気量および/または他の物理量として表現したデータを操作および/または変形するアクションおよび/またはプロセスに関連していることを、正しく認識する。このようなアクションおよび/またはプロセスは、例えば、記憶媒体中に記憶されている機械読み取り可能な命令の制御のもと、コンピューティングプラットフォームによって実行してもよい。このような機械読み取り可能な命令は、例えば、コンピューティングプラットフォームの一部として備えられている(例えば、処理回路の一部として備えられている、または、このような処理回路の外部にある)記憶媒体中に記憶されているソフトウェアまたはファームウェアを含んでいてもよい。さらに、特に述べられていない限り、フロー図を参照してまたは別の方法で、ここに記述するプロセスは、このようなコンピューティングプラットフォームによって、全体的にまたは部分的に実行および/または制御してもよい。
【0018】
ここで記述するワイヤレス通信技術は、ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)等のような、さまざまなワイヤレス通信ネットワークに関連することがある。用語「ネットワーク」および「システム」は、ここで、区別なく使用していることがある。WWANは、コード分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、単一搬送波周波数分割多元接続(SC−FDMA)ネットワーク等であってもよい。無線技術の例をいくつか挙げると、CDMAネットワークは、CDMA2000、ワイドバンドCDMA(W−CDMA)のような1つ以上の無線アクセス技術(RAT)を実現してもよい。ここで、CDMA2000は、IS−95、IS−2000、およびIS−856標準規格にしたがって実現される技術を含んでいてもよい。TDMAネットワークは、グローバルシステムフォーモバイル通信(GSM)(登録商標)、デジタルアドバンスド移動体電話機システム(D−AMPS)、または他のいくつかのRATを実現してもよい。GSMおよびW−CDMAは、「第3世代パートナーシッププロジェクト」(3GPP)と名付けられているコンソーシアムによる文書中に記述されている。CDMA2000は、「第3世代パートナーシッププロジェクト2」(3GPP2)と名付けられているコンソーシアムによる文書中に記述されている。3GPPおよび3GPP2の文書は、公に入手可能である。例えば、WLANは、IEEE802.11xネットワークを含んでいてもよく、WPANは、ブルートゥース(登録商標)ネットワーク、IEEE802.15xを含んでいてもよい。WWAN、WLAN、および/またはWPANを任意に組み合わせたものに関連して、ここで記述したワイヤレス通信インプリメンテーションを使用してもよい。
【0019】
図1Aは、信号を移動局40に提供している衛星ビークル50を示している。ここで使用したように、ハンドヘルド移動体デバイスまたは移動局(MS)は、その時々に変化するポジションまたはロケーションを有し得るデバイスに関連する。ポジションおよび/またはロケーションの変化は、ほんの数例として、方向、距離、向き等に対する変化を含んでいてもよい。特定の例では、移動局40は、セルラ電話機、ワイヤレス通信デバイス、ユーザ機器、ラップトップコンピュータ、パーソナルナビゲーションデバイス、他のパーソナル通信システム(PCS)デバイス、および/または他のポータブル通信デバイスを含んでいてもよい。移動局40はまた、機械読み取り可能な命令によって制御される機能を実行するように適合されている、プロセッサおよび/またはコンピューティングプラットフォームを備えていてもよい。
【0020】
ハンドへルド移動体デバイス40および/またはシステムは、衛星50から受信した信号に少なくとも部分的に基づいてデバイスのロケーションを推定してもよい。特に、このようなデバイス40および/またはシステムは、関係する衛星とナビゲーション衛星受信機との間のおよその距離を含む「擬似距離」測定値を取得してもよい。特定の例では、このような擬似距離は、1つ以上の衛星50からの信号を処理できる受信機において、衛星ポジショニングシステム(SPS)の一部として決定されてもよい。このようなSPSは、例えば、2、3個例を挙げると、グローバルポジショニングシステム(GPS)、Galileo、Glonass、または将来開発される何らかのSPSを含んでいてもよい。そのポジションを決定するために、衛星ナビゲーション受信機は、3つ以上の衛星に対する擬似距離測定値とともに、送信時におけるこれらの衛星のポジションを取得してもよい。衛星の軌道パラメータを把握することによって、任意の時点に対するこれらのポジションを計算することができる。その後、擬似距離測定値は、光速によって乗算される、信号が衛星から受信機に伝わる時間に、少なくとも部分的に基づいて決定されてもよい。具体的な実例として、SPSの、GPSおよび/またはGalileoタイプのロケーション決定のインプリメンテーションとして、ここで記述した技術を提供することがある一方で、これらの技術を他のタイプのSPSにも適用してもよいこと、そして主張する主題事項がこの観点に限定されないことを、理解すべきである。
【0021】
例えば、前述したSPSを含む、いくつかのSPSのうちの任意のものとともに、ここで記述した技術を使用してもよい。さらに、衛星と擬似衛星とを組み合わせたもの、または、擬似衛星を利用するポジショニング決定システムとともに、この技術を使用してもよい。擬似衛星は、GPS時間と同期されることがあるL帯域(または他の周波数)搬送波信号上で変調されるPRNコードまたは(例えば、GPSまたはCDMAセルラ信号に類似した)他のレンジングコードをブロードキャストする地上の送信機を備えていてもよい。遠隔受信機による識別を可能にするように、このような送信機に、一意的なPRNコードが割り当てられることがある。トンネル、鉱山、建物、都市の谷間、または他の閉じられたエリアにおけるような、軌道衛星からのSPS信号が入手不可能である状況に、擬似衛星は役立つかもしれない。擬似衛星の別のインプリメンテーションは、無線ビーコンとして知られている。ここで使用する用語「衛星」は、擬似衛星、擬似衛星の均等物、そして場合によっては他のものを含むことを意図している。ここで使用する用語「SPS信号」は、擬似衛星からのSPSと同様な信号、または、擬似衛星の均等物を含むことを意図している。
【0022】
ハンドヘルド移動体デバイス40および/またはシステムは、SVS信号(例えば、GPS信号)を受信するための第1の受信機と、ネットワーク情報を受信するための第2の受信機(例えば、移動電話機受信機またはトランシーバまたはセルラ電話機受信機またはトランシーバ)と、画像取り込みデバイス(例えば、カメラ)とを備えている。ネットワーク情報を受信するための第2の受信機は、セルラ電話機の一部であってもよい。これらのケースでは、移動体デバイス40は、カメラおよび機能性移動電話機の双方として動作でき、これにより、ユーザは、双方向の音声および/またはデータ通信のような、典型的な移動電話機機能を持つことができる。代替的に、第2の受信機は、機能性移動電話機に結合されていなくてもよい。これらのケースでは、移動体デバイス40は、(すなわち、ネットワーク情報による、および、SVS信号による)位置特定の手段を備えているが、典型的な移動電話機の機能を持たない、拡張したカメラであると考えてもよい。
【0023】
ハンドヘルド移動体デバイス40および/またはシステムは、カメラ、ビデオカメラ、または他の画像センサのような、画像を取り込む手段をさらに備えていてもよい。センサは、静止画像、サウンドありの動画画像、サウンドなしの動画画像、またはサウンドトラックを、単独で、または、任意の組み合わせで取り込んでもよい。
【0024】
ハンドヘルド移動体デバイス40および/またはシステムは、衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段をさらに備えていてもよく、この手段には、1つ以上のマイクロプロセッサ、制御装置、ハードウェア、ファームウェアおよび/またはソフトウェアといったものがある。ハンドヘルド移動体デバイス40および/またはシステムは、決定したポジションを画像にタグ付けする手段をさらに備えていてもよく、1つ以上のマイクロプロセッサ、制御装置、ハードウェア、ファームウェアおよび/またはソフトウェアを備えている。
【0025】
いくつかの実施形態では、ハンドヘルド移動体デバイス40は、センサ、ワイヤレス受信機またはワイヤレストランシーバ、SPS受信機およびプロセッサを備えている。データを取り込むために、感知したデータのプロセッサと対であることが多いセンサを使用する。センサは、静止画像を取り込むための画像センサであってもよい。代替的に、センサは、オーディオトラックを取り込むために使用されるオーディオセンサであってもよい。代替的に、センサは、動画を取り込むために使用されるビデオセンサであってもよい。代替的に、センサは、画像センサおよびオーディオセンサの双方とも備えていてもよい。
【0026】
以下で図3Bに関して説明するように、ネットワークカバレッジを決定したり、1つ以上の基地局のポジション情報を取得したりするために、ワイヤレス受信機またはワイヤレストランシーバを使用する。1つ以上のSVに対して、SPSカバレッジを決定したり、移動体デバイス40のポジション情報を取得したりするために、GPS受信機のようなSPS受信機を使用する。画像センサや、ワイヤレス受信機または送信機や、SPS受信機を調整したり、画像をロケーション情報と合成、または、ロケーション情報を画像にタグ付けしたりするために、プロセッサを使用する。
【0027】
図1Bは、ロケーション位置を画像にタグ付けするプロセスを示している。例えば、決定したポジションをデジタル画像と関係付けることによって、デジタル画像は、地理的起源の表示がタグ付けされてもよい。代替的に、タグは、デジタル画像を含むデジタルファイル内の埋め込まれたフィールド(例えば、ヘッダ)中に記憶されてもよい。代替的に、タグは、デジタル画像をレビューするときに認識可能な、(例えば、写真上の日付け/タイムスタンプに類似した)可視または可聴ラベルの形態であってもよい。タグは、緯度および経度を含んでいてもよい。タグは、高度も含んでいてもよい。代替的に、または、さらに、タグは、都市または地方のアドレスに変換されてもよい。
【0028】
ステップ10において、移動局40が、画像データを取り込む(例えば、サウンドありの、または、サウンドなしのビデオ画像あるいは静止画像を取得する、あるいはオーディオトラクトを記録する)。次に、ステップ20において、移動局40が、スタンドアローンGPS技術を使用して、ロケーション位置を決定する。例えば、移動局40は、複数の衛星ビークル50からのGPS信号を検出したり、捕捉したり、復調したりしようと試行する。ここで提供する例において、GPS信号およびGPSシステムに対してなされる言及は、例示によってのみ参照される。さまざまな衛星ポジショニングシステム(SPS)技術のうちの任意のもの(例えば、GPSや、Galileoや、Glonass)を使用してもよい。一般的に、このような移動局40が、オープンな屋外環境中にあるときに、このGPS信号を捕捉する際、移動局40は最適に動作するが、残念なことに、このプロセスは、かなりの時間がかかる。最終的に、いったんロケーション位置が決定されると、移動体デバイス40がロケーション位置を画像にタグ付けする。
【0029】
図2は、ワイヤレスネットワークと通信している移動局40と、衛星ビークル50とを示している。いくつかの移動体デバイス40は、いずれもGPS使用可能であり、ワイヤレスネットワークと通信することができる。ワイヤレスネットワークは、基地局60と、ロケーションサーバ(LS)80と、ネットワーク70とを含む。基地局60(例えば、基地トランシーバ局(BTS)や、基地局制御装置(BSC)や、アクセスポイントや、これらに類するもの)は、無線送信機および受信機を備えており、特定のセルにおける音声およびデータコールを、移動体電話機とネットワークとに、そして移動体電話機とネットワークとから接続するために使用される。ロケーションサーバ80は、移動局のロケーションを決定する際に、移動局と協働する。ロケーションサーバは、移動局40がネットワークに接続されているのはどの基地局60かを把握することによって、移動局40を粗く位置付けるかもしれない。さらに、ロケーションサーバ80は、支援データを移動局40に送ってもよく、支援データは、暦および天体暦の衛星軌道データや、時間情報や、ドップラーウィンドウや、利用可能な衛星をより速く自動的に追跡する際に移動局40を支援するための他のサーチ支援データからなる。ロケーションサーバ80は、生のロケーションデータを移動局40から受信してもよい。ロケーションサーバ80は、移動局40よりも、計算能力がより高いので、ロケーションサーバ80は、移動局40からロケーションサーバ80に中継された信号を、より良く処理することができる。このようなコンフィギュレーションは、計算の大部分をロケーションサーバ80上にオフロードすることによって、GPS位置特定のために必要とされるCPU処理能力量を移動局40が減少させることができる。ネットワーク70は、さまざまなネットワーク相互接続コンポーネント(例えば、基地局制御装置(BSC)や、移動体スイッチングセンター(MSC)や、公衆電話交換ネットワーク(PSTN)や、これらに類するもの)を含む。
【0030】
本発明にしたがった、単一のデバイスには、画像取り込みデバイス(例えば、カメラ)、移動局(例えば、セルラ移動電話機)や、位置特定デバイス(例えば、GPSユニット)の機能性がある。しかしながら、3つのデバイスを単一のハウジングに単に組み合わせることは、ユーザビリティを不十分にすることがあり、いくつかの障害を招く。第1に、1つより多いバッテリーまたは電源を必要とすることがある。第2に、このような、集積デバイスは、回路を共有していない;したがって、一定の比率に応じて情報を共有しない。第3に、画像取り込みと、移動電話機の動作と、位置特定は、必然的に衝突する。第4に、重複したハードウェアを使用する。例えば、3つのデバイスは、それぞれ、プロセッサを有しており、プロセッサは、他の2つのプロセッサの状態に対するアクセスを持っておらず、都合よく情報を共有する能力を制限する。
【0031】
3つの独立したデバイスが、3つのデバイスの機能に対して単一のプロセッサを有するデバイスに組み込まれていると仮定すると、他のいくつかの障害に直面するかもしれない。例えば、実行する位置特定タスクと実行する取り込み画像タスクとの間に、競合が生じるかもしれない。位置特定には、かなりの量の処理能力が必要である。このことにより、ユーザが、位置特定エンジン実行に並行して、画像を取り込もうと試行したときに、取り込みタスクにかなりの待機時間を生じさせる。したがって、プロセッサの処理能力が不十分である場合には、優先スキームが必要であるかもしれない。例えば、画像を取り込むことは、ユーザが画像を取り込み始めたときに位置特定を停止させることになる可能性があるが、いったんユーザが画像を取り込むことを完了すると、位置特定タスクを再開させる必要があるかもしれない。
【0032】
以下で記述した実施形態のうちのいくつかが、これらの障害のうちの1つ以上の障害を緩和する。このような実施形態は、複数の機能タスク間の通信および対話を調整して、拡張機能およびユーザ経験を効果的に提供するように結合されている1つ以上のプロセッサを含んでいてもよい。
【0033】
マルチプロセッサソリューションは、共有メモリを含んでいてもよく、これにより、別個のプロセッサ上で実行するタスクが通信することを可能にする。例えば、第1のプロセッサ上で実行している位置特定タスクが、ロケーションを周期的に決定し、その決定したロケーションを共有メモリロケーション(例えば、メモリロケーションにアクセスするための2つのバスを有するメモリ)中に記憶してもよい。取り込み画像タスクは、第2のプロセッサ上で実行しているかもしれない。それぞれの画像が取り込まれた後に、共有メモリ中に記憶した最後のポジションを取り出すために、取り込み画像タスクが共有メモリにアクセスしてもよい。
【0034】
十分な処理能力を利用可能である場合には、単一のプロセッサソリューションが、2つ以上のタスクを並列して実行してもよい。例えば、取り込みタスクが、ドータータスクとして位置特定タスクをコールしてもよい。代替的に、単一プロセッサは、タスクを連続して実行してもよい。例えば、それぞれのタスクに、異なる優先順位を割り当ててもよく、これにより、1つのタスクがより高い優先順位を持つことを可能にし、より低い優先順位のタスクデバイスを中断することを可能にする。ハードウェアは、位置特定タスクを最初に実行し、その後、画像取り込みを促進するために、画像取り込みが、位置特定を一時的に停止させることを可能にしてもよい。いったん取り込み画像タスクがその処理を完了すると、位置特定タスクは、中断されたところから開始してもよい。
【0035】
いくつかの実施形態では、ユーザが画像を取り込み始めるまで、位置特定エンジンはアイドルである。ユーザが画像を取り込み始めた後に、いったん処理能力が入手可能であると(例えば、いったんユーザが画像または一連の画像を取り込み終えると、あるいは代替的に、いったんユーザが最初の画像を取り込み始めると)、取り込み画像プロセスは、位置特定エンジンを開始する。ポジション位置が入手可能になったとき、(例えば、別個のタグ付けタスク、または代替的に、画像取り込みタスクまたは位置特定タスクによる)タグ付け動作に戻って、位置特定タグを待っているそれぞれの画像にタグ付けする。いったん画像取り込みプロセスが完了して、画像がタグ付けされると、画像取り込みタスクは、アイドル状態に戻るように位置特定タスクに命令してもよい。
【0036】
さらに、より詳細に以下で記述するように、他のコンフィギュレーションが可能である。
【0037】
図3Aおよび図3Bは、本発明のいくつかの実施形態にしたがった、状態図および真偽表を示している。処理能力に制限のある移動局や、バッテリー電力の制限のある移動局は、3つのアクティブモード:状態100、状態310、および状態330のうちの1つで動作してもよい。特定の状況に応じて、移動局は、1つの何らかの状態から他の何らかの状態に移行してもよい。状態100において、移動局が、GPS衛星システムおよびワイヤレスネットワークからのデータの、品質と入手可能性とに基づいてロケーション位置を決定している。ロケーション位置は、1つ以上のGPS衛星から受信したデータのみから、1つ以上の基地局から受信したデータのみから、またはGPS衛星および1つ以上の基地局の双方から受信したデータから決定してもよい。例えば、ロケーション位置は、基地局によってブロードキャストされた識別子(例えば、セルまたはアクセスポイントの識別子)からのものであってもよく、あるいは、地上基地局にそれぞれ関係する複数のロケーションを重み付けることから決定してもよい。
【0038】
移動局が画像を取り込んでいないときや、有効なロケーション位置が入手不可能であるときに、移動局は状態100に入る。決定したポジションは、単一のポジション、ポジションの平均、ポジションの重み付けされた平均、ポジションの時間平均、またはこれらに類したものであってもよい。例えば、ポジションは、ポジションのシーケンスの補間からなっていてもよい。例えば、ビデオが取り込まれた直前および直後のポジションの補間を、決定したポジションとしてビデオ画像に対して使用してもよい。画像を取り込むプロセスをユーザが開始したときに、移動局は、状態100を中断し、いったん十分なロケーション位置が決定されると状態100を出てもよい。代替的に、移動局は、以下の手段:スタンドアローンGPSポジション決定、MSベースのポジション決定、MS支援ポジション決定、および/または、長期間の軌道情報によるスタンドアローンGPSポジション決定、のうちの1つ以上のものによって決定された1つ以上のポジションを補間してもよい。
【0039】
状態310において、移動局は、画像を取り込むプロセスにある。ユーザが、取り込み、すなわち記録ボタンをアクティブ化したときに、移動局は状態310に入る。(例えば、画像を最後に取り込んだときから予め定められた時間の後に)いったん画像取り込みプロセスが完了すると、移動局は状態310を出る。状態330において、移動局が、以前に取り込んだ画像にタグ付けする。有効なロケーション位置が存在するときに、いったん取り込まれた画像にポジションタグがないと、移動局はこの状態に入る。移動局はまた、ユーザの指示で状態330に入るかもしれない。
【0040】
図3Bは、ネットワーク信号および/またはGPS信号の存在に基づいて、どのように移動局がロケーション位置を決定するかを示している。移動局は、衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいてポジションを決定する。衛星信号およびワイヤレスネットワーク信号の存在と品質とに応じて、移動局は、ポジション位置を決定するための方法を選択する。移動局は、ポジションを決定するためにモードのうちの1つを選択する。第1のモード(スタンドアローンGPSモード)では、移動局は、GPSシステムからの信号のみを使用する。第2のモード(支援GPSモード)では、移動局は、GPSシステムおよびワイヤレスネットワークの双方からの信号を使用する。第3のモード(ネットワーク情報モード)では、移動局は、ワイヤレスネットワークからの信号のみを使用する。移動局によって選択されたモードは、受信信号の、入手可能性と品質とに依存する。信号が入手不可能である場合には、移動局は、第4のモードで動作してもよく、第4のモードでは、ポジションの入力をユーザに促す。
【0041】
ここで、GPS信号について説明するが、GPS信号に加えて、または、GPS信号の代わりに、他のタイプのSPS信号を同様に使用してもよい。例えば、スタンドアローンGPS信号を使用することよりもむしろ、スタンドアローンGallieoモード、スタンドアローンGlasnosモード、または、2つ以上の異なるSPS信号を組み合わせたものを同等に使用してもよい。例えば、ポジションを決定する際に支援するために、GPS信号およびGlasnos信号の両方を捕捉および処理してもよい。
【0042】
移動局は、第1のしきい値を満たすGPS信号に基づいて、スタンドアローンGPSモードを選択してもよい。しきい値は、GPS信号の品質および/またはGPS信号の量に関連していてもよい。例えば、移動局は、最初に、良好なGPSカバレッジが入手可能であるか否かを決定する。例えば、それぞれ、有効な信号品質を有している、予め定められた数(例えば、3個、4個、5個、または6個)のGPS信号が移動局において入手可能である場合、移動局は、スタンドアローンGPS技術から、良好なGPSカバレッジと、基地局のポジション決定とを宣言できる。オプション1として示されているように、この従来のGPS技術は、強い信号状態で信頼性あるポジションを提供し得るので、他の技術を使用することは、不要であるかもしれない。悪い信号の状態では(例えば、高い建物または建物の木によって囲まれているとき、あるいは、建物の中で)、スタンドアローンGPSは信頼性が低くしか機能しない。さらに、悪い信号エリアでは、移動局40は、暦および天体暦データを衛星から受信することはできないかもしれない。
【0043】
移動局は、第1のしきい値よりも低い第2のしきい値を満たすGPS信号に基づいて、そしてネットワーク情報の入手可能性にさらに基づいて支援GPSモードを使用することを選択してもよい。利用可能なGPS衛星が悪い(例えば、衛星の数が少ない、および/または、所望の信号品質よりも低い)カバレッジしか提供しないが、移動局が基地局(BS)信号にアクセスできる場合には、移動局は、支援GPS(A−GPS)技術を使用して、または、基地局からの、セルまたはアクセスポイントの送信された識別子に基づいて、そのポジションを決定してもよい。A−GPSでは、移動局は、衛星からの暦および天体暦データを待つ、または、衛星からの暦および天体暦データを復調しようと試みるよりもむしろ、暦および天体暦データを基地局から受信するかもしれない。この支援データにより、移動局は、そのポジションを見つける際に、悪いGPS信号をより都合よく使用することができる。
【0044】
代替的に、オプション2として示されているように、移動局は、第1のしきい値を満たすGPS信号に基づいて、そしてネットワーク情報の入手可能性にさらに基づいて、支援GPSモードを選択してもよい。移動局が、良好なGPSカバレッジを有し、ネットワークカバレッジも有している場合、移動局は、場合によってはより迅速なポジション確定のために、支援GPSモードを使用してもよい。
【0045】
支援GPSモードでは、移動局は、GPS信号をより効率的に捕捉するために、支援データをネットワークから受信し、この支援データを使用してもよい。代替的に、または、さらに、移動局は、GPS信号を使用して第1のロケーションを、そしてネットワーク情報のみを使用して第2のロケーションを計算してもよい。(先に記述した)ネットワーク情報のみに基づいたロケーションは、1個、2個、3個、またはより多くの基地局のロケーションに基づいていてもよい。(例えば、不確実性に基づいて、2つのポジションに対して重み付けすることによって)第1および第2のロケーションを平均化して、移動局がその決定したロケーションとして使用してもよい第3のポジションを決定してもよい。代替的に、一連のロケーションを累積して、決定したロケーションを生成させてもよい。
【0046】
移動局は、第2のしきい値を満たさないGPS信号に基づいて、そしてネットワーク情報の入手可能性にさらに基づいて、ネットワーク情報モードを選択してもよい。GPS信号が入手不可能である(すなわち、移動局が、GPSカバレッジを有さないロケーションにある)場合、移動局は、そのロケーション位置を設定する際に、基地局信号から獲得したネットワーク情報のみを使用してもよい。ネットワーク情報モードでは、移動局は、ポジションを決定する際に、ネットワーク情報のみを使用する。例えば、移動局は、三辺測量または三角測量を使用してもよい。三辺測量は、基地局の相対的なポジションを、三角測量と類似した様式で決定する。角の測定値を(少なくとも1つの知られている距離とともに)使用して移動局のロケーションを計算する三角測量とは異なり、三辺測量は、これらの基地局のそれぞれと移動局との間の距離と、2つ以上の基地局のロケーションとを使用する。三辺測量を単独で使用して、2次元面上で移動局のロケーションを決定するために、一般的には、少なくとも3つの基地局のロケーションを使用するが、1つ、または、2つのみの基地局のロケーションを用いて、不確実性がより高いロケーションが計算されることがある。
【0047】
移動局は、GPS信号およびネットワーク信号の欠如に基づいて、オフラインモードを選択してもよい。GPS信号が入手不可能であり、移動局がサービス停止(OOS)エリア中にある場合、ロケーション位置は入手不可能である。このケースでは、画像にタグ付けするときに、移動局は、その最後の知られているロケーション位置を使用し、ユーザが位置を手動で提供することを許容してもよく、または代替的に、位置をブランクの状態にしてもよい。
【0048】
図4は、本発明のいくつかの実施形態にしたがった、ロケーション位置を設定するための手段を決定するフローチャートを示している。ステップ101では、ロケーション位置をユーザが手動で提供することを許容するか否かを決定するための、または、ロケーション計算を自動的に実行するか否かを決定するためのロケーション位置決定プロセスを、移動局が開始する。例えば、中断の結果として、ステップ101に入ってもよい。手動の場合には、190において処理が続く。自動の場合には、110において処理が続く。190において、ユーザは、位置、すなわちロケーション(例えば、経度および緯度、ストリートアドレス、テキスト記述)を提供する。
【0049】
110において、スタンドアローンGPSによるロケーション確定が可能であるか否かを、例えば、移動局が、良好なGPSカバレッジを有するか否か、または、現在の天体暦および暦情報を有するか否かを、移動局が決定する。そうである場合には、120において、移動局が、スタンドアローンGPSのみを通して、そのロケーション位置を決定および設定する。そうでない場合には、130において、移動局が、技術を組み合わせたものを使用してロケーション位置を決定できるか否かを決定する。例えば、GPSカバレッジは入手可能であるものの悪く、移動局が基地局と接続がある場合、移動局は140に続く。140において、移動局が、支援GPSを通して、そのロケーション位置を決定および設定する。例えば、移動局が、基地局を通して、ワイヤレスネットワークから支援データを最初に受信する。
【0050】
次に、移動局は、GPS信号を捕捉およびロケーション位置を決定するために、この支援データを使用する。GPSカバレッジが存在しない場合、移動局は150に進み、150において、移動局が、ネットワーク情報のみから基地局のロケーション位置を決定してもよい。すなわち、GPS信号が存在しないが、基地局を通した、ネットワークに対する接続が存在する場合、移動局は、粗ロケーション位置を提供するために、基地局から受信する情報を使用してもよい。160のように、移動局は、ネットワーク情報を通して、そのロケーションを決定および設定する。
【0051】
GPSカバレッジが存在せず、移動局がサービス停止(OOS)エリア中にある場合、移動局は170に進み、170において、位置は現在入手不可能であることを、移動局が決定する。いくつかの実施形態において、位置が入手不可能である場合、手動で位置を入力するようにユーザに問い合わせがされる。(120、140、または160から)ロケーション位置が入手可能である場合、あるいは、(170から)位置が入手不可能である場合、180において、移動局が、現在のロケーション位置を含む変数と、ロケーション位置が決定されていることを示しているフラグとを適切に更新してもよい。
【0052】
図5Aおよび図5Bは、本発明のいくつかの実施形態にしたがった、スクリーンショットを図示している。ユーザは、画像にタグ付けするために、どのロケーション位置を使用するかを決定してもよい。すなわち、ユーザは、1つ以上の画像を取り込むことに関連して、どの1つ以上のポジションが使用されるかを移動体デバイスに示す1つ以上のコンフィギュレーション可能なパラメータを設定してもよい。
【0053】
図5Aは、コンフィギュレーションスクリーンを示している。画像が取り込まれる前に、または、画像が取り込まれた後にロケーション位置が決定されるかを、ユーザは選択してもよい。第1のオプションでは、ユーザは、画像が取り込まれた後に決定されたロケーション位置を使用するように移動局に命令する。第2のオプションでは、ユーザは、画像が取り込まれる前に決定されたロケーション位置を使用するように移動局に命令する。(示していない)第3のオプションでは、ユーザは、入手可能な最適なロケーション位置を使用するように移動局に命令する(例えば、2つの位置−画像が取り込まれる前の位置、および、画像が取り込まれた後の位置―を決定して、画像の取り込みに時間的に最も近いロケーション位置を使用する)。ユーザは、どの頻度で新しいロケーション位置を画像にタグ付けするかも設定してもよい。例えば、ユーザは、その個々のロケーション位置を画像ごとに決定することを選択してもよい。代替的に、一連の取り込んだ画像における最初の画像に対してロケーション位置を決定することを、ユーザは選択してもよい。すなわち、最初に取り込まれた画像に対して、ロケーション位置を決定し、その後、後続する画像(例えば、最初の画像から、または、以前の画像から予め定められた秒数の画像)に、最初の取り込まれた画像に対して使用されたのと同じ決定されたロケーション位置がタグ付けされる。
【0054】
他の変数も、ユーザコンフィギュレーション可能であってもよく、または同様にシステムコンフィギュレーション可能であってもよい。例えば、ロケーションプロセスの中断から、画像取り込みプロセスを可能または不可能にするために、変数が設定またはクリアされてもよい(例えば、以下で図7Cを参照して説明する、画像を取り込む310、および、位置を決定100)。例えば、変数が設定された場合、画像を取り込もうと試行するユーザは、ロケーションプロセスを停止させる。変数がクリアされた場合、画像を取り込もうと試行しているユーザは、ロケーションプロセスか完了するまで待たされるだろう
図5Bは、バッチモード中に使用されるスクリーンショットを示している。スクリーンショットは、オプションのリストと、画像のリスティングとを含む。示した画像のリスティングは、移動局内で入手可能な以前に取り込まれた画像のリストである。画像のリスティングは、ロケーション位置の品質(GPS位置、粗位置、位置なし)および/または画像が取り込まれた日付けおよび時間に基づいて、フィルタリングまたは順序付けしてもよい。例えば、タグ付けされていない画像のみを、リストアップしてもよいし、または代替的に、GPSロケーション位置がない画像のみをリストアップしてもよい。さらに、画像は、関係する属性のあるリストとして、または、縮小画像(サムネイル)として表示してもよい。
【0055】
バッチモードでは、ユーザは、一度に、多数の画像にタグ付けしてもよい。例えば、画像のリスティングから選択された1組の画像に、位置なしというタグが付けられている場合、ユーザは、ロケーション位置をこの1組の画像に設定するように命令してもよい。さらに、1組の画像に粗ロケーション位置のみがタグ付けされている場合、ユーザは、新しいロケーション位置を設定するように移動局に命令してもよい。第1のオプションでは、ユーザは、移動体デバイスにおいて入手可能な最後のロケーション位置を使用して、画像のリスティングからユーザが選択した1組の画像にタグ付けするように移動局に命令する。第2のオプションでは、ユーザは、新しいロケーション位置を得て、この新しいロケーション位置を、選択した1組の画像にタグ付けするように移動局に命令する。(示していない)第3のオプションでは、ユーザは、位置(例えば、ロケーションのテキスト記述、アドレス、GPS座標、またはこれらに類するもの)を手動で入力して、手動で入力した位置を、選択した1組の画像にタグ付けするように移動局に命令する。
【0056】
図6A、図6B、図6C、図6D、図7A、図7B、図7C、図8A、図8B、図8C、図9A、図9B、および図9Cは、本発明のいくつかの実施形態にしたがった、移動局に対する動作のさまざまな、通常モードおよび中断モードを図示している、時系列図およびフローチャートを示している。移動局は、画像を取り込むことと、ロケーション位置を決定することと、画像にタグ付けすることとの間でバランスを取る。図面は、移動局のカメラの4つの状態:カメラのアイドル状態200と、3つのアクティブ状態−画像取り込み状態210と、ロケーション位置決定状態220と、ポジションのタグ付け状態230と−を示している。カメラのアイドル状態220において、または同様に待機状態330において、それぞれ開始する。いったん移動局が電源投入され、ユーザ入力を待っていると、または代替的に、いったんカメラ(または他の記録デバイス)が電源投入され、ユーザ入力を待っていると、この状態に入るかもしれない。
【0057】
図6A、図6B、図6C、および図6Dは、画像が取り込まれた後に画像ごとにロケーション位置を獲得するように移動局がコンフィギュレーションされている例を示している。図6Aに示したように、ユーザが画像取り込みを開始したとき、移動局はカメラアイドル状態200を出て、これにより、状態210に入る。期間「A」の間に、画像が取り込まれる。いったん画像取り込みが完了すると、移動局は、状態220に入ることによって、ロケーション位置の決定を開始する。図3Bを参照して上述したように、移動局は、良好なGPS信号、悪いGPS信号、または存在しないGPS信号の入手可能性とともに、基地局信号の入手可能性、すなわちサービス停止(OOS)エリア中にあるかを組み合わせたものに基づいてロケーション位置を決定する。移動局は、時間の期間「B」にわたって、ロケーション位置を決定するように動作する。いったんロケーション位置を決定すると、移動局は、状態230に入ることによって、決定したロケーション位置を画像にタグ付けし、移動局がアイドル状態200に戻るまで、大変短い時間の量「C」しかかからない。(「D」における)2番目の画像の取り込みに続いて、(「E」における)新しいポジション決定が続き、最後に(「F」において)画像にタグ付けする後続するユーザアクションにより、このプロセスは繰り返す。
【0058】
図6Bは、画像のシーケンスを取り込む移動局を示している。アイドル状態200から、移動局は、期間「A」の間に画像取り込み(状態210)を開始する。いったん画像が取り込まれると、移動局が、期間「B」にわたって、ロケーション位置を決定する(状態220)。この例では、ロケーション位置が決定される前に、ユーザが、2番目の画像取り込みを開始することによって、ロケーション位置決定プロセスを中断する(再入状態210)。「C」の間に、2番目の画像が取り込まれる。次に、移動局は、状態220に再び入り、期間「D」の間に、ロケーション位置の決定を完了する。いったんロケーション位置を決定すると、期間「E」の間に、ちょうど取り込まれた2つの前の画像に、決定したロケーション位置がタグ付けされる。いったん画像がタグ付けされると、カメラは、カメラのアイドル状態220に戻る。
【0059】
図6Cは、画像を取り込むことに続いて、ロケーション位置を決定しようとする一連の試行を示している。「A」において、移動局は、アイドル状態200のままであり、画像を取り込む状態210に入る。「B」において、例えば、移動局が、GPSカバレッジのないOOSエリア中にある場合、移動局は、位置を決定しようと試行するが、不成功に終わる。移動局は、予め定められた値でタイマを設定し、Cの期間の間に、アイドル状態200に再び入る。「D」において、タイマがタイムアウトし、移動局が、ロケーション位置を決定する第2の時間を試行する。再び、この例では、位置は入手不可能である。移動局は、アイドル状態200における「E」の期間の間、再び、タイマを設定して待機する。「F」においてもう一度、タイマがタイムアウトすると、移動局は、ロケーション位置決定状態220に再び入る。この例では、ロケーション位置を決定する。「G」において、移動局は状態230に入り、より早く取り込まれた画像にタグ付けすることに進む。最後に、移動局は、アイドル状態200に戻る。
【0060】
図6Dは、画像が取り込まれた後に、ロケーション位置を画像ごとに獲得するようにコンフィギュレーションされている移動局に対するイベントおよびアクションを要約しているフロー図を示している。(アイドル状態200に相当する)待機状態300において、フローが開始してもよい。ユーザが画像の取り込みを開始する場合、移動局は状態300を出てもよい。代替的に、ユーザがカメラモードを使用可能にした場合、移動局は状態300を出てもよい。さらに、タイムアウトが生じた場合、移動局は、状態300を出てもよい。状態310において、移動局が、画像または画像の緊密なシーケンスの取り込みを開始する。いったん最後の画像が取り込まれると、移動局は状態310を出て、ロケーション位置決定プロセスを開始するために状態100に入ってもよい。状態310に入ったが、画像が取り込まれなかった場合、移動局は、タイムアウトし、状態300において待機するために戻ってもよい。状態100において、移動局が、ロケーション位置を決定するプロセスを開始する。ロケーション位置が決定された場合(これにより、状態330に入る)、位置が入手不可能である場合(これにより、タイマを設定し、待機状態300に戻る)、または状態310における画像取り込みプロセスをユーザが開始することによって中断が生じた場合、移動局は状態100を出る。状態330において、移動局は、タグ付けされていない取り込まれた画像(または画像のシーケンス)にタグ付けし、待機状態300に戻る。
【0061】
図7A、図7B、および図7Cは、画像が取り込まれる前に、画像ごとに獲得されたロケーション位置を使用するように移動局がコンフィギュレーションされている例を示している。
【0062】
図7Aでは、「A」において、移動局が、アイドル状態200を出て、ロケーション位置を決定する状態220に入り、その位置を決定し、決定した位置をメモリに保存する。タイマの期限が切れたときに、現在のロケーション位置が新しいロケーション位置にリフレッシュされるように、移動局は期限切れタイマを設定してもよい。例えば、期限切れタイマは、予め定められた時間の期間(例えば、5分、10分、15分、20分、25分、30分、45分、または60分)に設定してもよい。このような方法で、移動局は、将来のタイムスタンプ付けのために、正確なロケーション位置、または、ほとんど正確なロケーション位置を有する。期限切れタイマが設定された後、移動局は、アイドル状態200に再び入る。少ししてから、または、予め定められた時間の後に、ユーザは、移動局が、画像を取り込む状態210に入るようにさせる。移動局は、メモリに保存された有効なロケーション位置をすでに有しているので、画像は、状態230における期間「C」の間に、すぐにタグ付けされるかもしれない。いったんタグ付けされると、移動局は、アイドル状態200に再び入ってもよい。この例では、期限切れタイマの期限は、切れており、現在のロケーション位置がリフレッシュされるべきであることを示している。「D」の間に、移動局は状態220に入り、新しいロケーション位置を決定し、以前のロケーション位置を置換して、決定したロケーション位置をメモリに保存する。このコンフィギュレーションでは、ロケーション位置を取得したものの、必ずしも使用しなくてもよい。ロケーション位置を使用する場合には、ロケーション位置を決定した後に取り込まれた画像に対して使用する。
【0063】
図7Bは、ユーザが画像を取り込むことによってポジション決定プロセスが中断されるイベントのシーケンスを示している。「A」において、移動局は、ロケーション位置決定を開始するために状態220に入る。ユーザは、(状態210における「B」において)最初の画像を取り込み始めることによって、このプロセスを中断する。いったん画像取り込みが完了すると、移動局は、ロケーション位置決定プロセスを続けるために状態220に再び入る。この例は、ユーザが、画像を取り込む状態210に再び入ることによって、このプロセスの第2の中断を示している。いったん完了すると、再び、移動局は、(状態220における「E」において)ロケーション位置特定プロセスを続ける。最後に、プロセスは、ロケーション位置を決定し、(状態230における「F」において)以前に取り込まれたタグ付けされていない画像にタグ付けする。移動局は、その後、アイドル状態200に戻る。
【0064】
図7Cは、画像が取り込まれる前に、画像ごとにロケーション位置を獲得するようにコンフィギュレーションされている移動局に対するイベントおよびアクションを要約しているフロー図を示している。画像が取り込まれる前に獲得されるロケーション位置を使用するように移動局がコンフィギュレーションされているときに、処理は、ロケーション位置を決定する状態110により開始する。プロセスがロケーション位置を決定した場合(これにより、待機状態300に出る)、または、中断が生じた場合(これにより、状態310に出る)、例えば、ユーザが画像を取り込もうと試すことによって、移動局は状態100を出てもよい。状態300において、移動局が、ユーザアクションまたはタイムアウトを待っている。ユーザが画像の取り込みを開始した場合、移動局は、状態310に進む。移動局が、画像を取り込み、ロケーション位置が入手可能である場合、移動局は、画像にタグ付けする状態330に進む。一方、画像は取り込まれたが、位置は入手不可能である場合、移動局は、ロケーション位置を決定する状態100に戻る。予め定められたタイムアウト期間の後、画像が取り込まれなかった場合、ロケーション位置を必要とする場合には、移動局は、タイムアウトし、(状態100において)ロケーション位置を決定するために戻ってもよく、あるいは、位置が不要である場合には、タイムアウトし、(状態300において)待機するために戻ってもよい。いったんロケーション位置が古くなり、リフレッシュされる必要があると、または、時間の予め定められた期間に対して位置が入手不可能である場合に状態300は、タイムアウトするようにコンフィギュレーションされてもよい。このリフレッシュタイマの期限が切れたときに、移動局は、状態100において新しいロケーション位置を決定するために状態300を出る。いったん新しいロケーション位置が決定されると、移動局は、状態100を出て、まったくタグ付けされていない画像にタグ付けするために状態330に入ってもよい。
【0065】
図8A、図8B、および図8Cは、画像のシーケンス中の最初の画像が取り込まれた後に、ロケーション位置を獲得するように、そして画像のシーケンスのそれぞれに対して同じロケーション位置を使用するように移動局がコンフィギュレーションされている例を示している。以前の画像の前の、予め定められた時間の期間内にそれぞれの画像が取り込まれ始めたことに基づいて、画像のグループは画像のシーケンスであると決定してもよい。例えば、シーケンス中の画像は、すぐに先行する画像から、30秒、1分、2分、3分、4分、5分、または、他の何らかの予め定められた時間の期間で取り込まれる。代替的に、シーケンス中の画像は、予め定められた時間ウィンドウ内に取り込まれる。例えば、シーケンス中の画像は、最初の画像から、5分、10分、15分、または30分のウィンドウ内に取り込まれる。代替的に、シーケンスを終了するように移動局にユーザが命令するまで、画像のシーケンスは続いてもよい。
【0066】
図8Aは、同じロケーション位置がタグ付けされている取り込まれた画像のシーケンスを示している。「A」において、ユーザが、状態210で最初の画像を取り込む。「B」における、最初の画像の取り込みに続いて、状態220でロケーション位置を決定する。「C」において、決定したロケーション位置を使用して、最初の画像に状態230でタグ付けする。移動局は、アイドル状態200に戻る。「D」において、移動局が、2番目の画像を状態210で取り込む。状態200で新しいロケーション位置を決定する代わりに、以前に決定したロケーション位置を使用して、状態230で、2番目の画像にタグ付けする。シーケンス中の後続する画像は、状態210で同様に取り込まれて、状態230でタグ付けされる。決定したロケーション位置は、リフレッシュされたポジションロケーション位置に将来置換され、後続する画像のシーケンスに使用してもよい。
【0067】
図8Bは、ユーザが画像を取り込むことによって、ポジション決定プロセスが中断されるイベントのシーケンスを示している。「A」において、移動局が、最初の画像を取り込むために状態210に入る。「B」において、移動局が、ロケーション位置決定を開始するために状態220に入る。ユーザは、(状態210における「C」において)2番目の画像の取り込みを開始することによってこのプロセスを中断する。いったん画像取り込みが完了すると、移動局は、(「D」において)ロケーション位置決定プロセスを続けるために状態220に再び入る。いったん移動局が、新しいロケーション位置を決定して、メモリに保存すると、移動局は、(状態230における「E」において)、以前に取り込まれた2つのタグ付けされていない画像にタグ付けする。その後、移動局は、アイドル状態200に戻る。(状態210における「F」において)ユーザが3番目の画像を取り込むことにより、画像のシーケンスは続く。3番目の画像も、(状態230における「G」において)同じロケーション位置がタグ付けされる。画像のシーケンスが終了するまで、同じロケーション位置が使用される。最終的に、保存されたロケーション位置は、リフレッシュされて更新されたロケーション位置と置換してもよい。
【0068】
図8Cは、画像のシーケンス中の最初の画像が取り込まれた後に、ロケーション位置を獲得するように、そして画像のシーケンスのそれぞれに対して同じロケーション位置を使用するようにコンフィギュレーションされている移動局に対するイベントおよびアクションを要約しているフロー図を示している。移動局が待機状態300にあることで、フローは開始する。ユーザアクションは、移動局が、画像取り込み状態310に入るようにさせる。画像が取り込まれ、位置が入手不可能である場合、移動局は、ロケーション位置を決定する状態100に入る。画像が取り込まれて、(例えば、写真のシーケンス中の以前の写真から結果的に得られる)ロケーション位置が利用可能である場合、移動局は、画像にタグ付けする状態330に入る。画像が取り込まれなかった場合、移動局はタイムアウトし、待機状態300に戻ってもよい。いったん画像がタグ付けされると、移動局は待機状態300に戻る。状態100においてロケーション位置を決定するプロセスの間に、移動局が、ロケーション位置を決定して、1つ以上の画像にタグ付けするために状態330に入ってもよく、ユーザが別の画像を取り込むことによってプロセスが中断され、状態310に入ってもよく、または、ロケーション位置を取得することができず、待機状態300に戻るかもしれない。状態300において待機している間、移動局は、周期的にタイムアウトし、タグ付けされていない画像に対するロケーション位置を取得しようと試行してもよい。タグ付けされていない画像に自動的にタグ付けするときに、その試行を最終的に放棄するまで、予め定められた時間の期間にわたって、移動局は、周期的にタイムアウトしてもよい。
【0069】
図9A、図9B、および図9Cは、画像のシーケンス中の最初の画像が取り込まれる前に獲得されたロケーション位置を使用するように、そして、画像のシーケンスのそれぞれに対して同じロケーション位置を使用するように、移動局がコンフィギュレーションされている例を示している。
【0070】
図9Aは、画像のシーケンスを取り込み、同じ予め決定されたロケーション位置をこれらの画像にタグ付けするプロセスを示している。「A」において、最初の画像が取り込まれる前にロケーション位置を決定することで、処理が始まる。いったんロケーション位置が決定されると、移動局は、待機状態200に入る。「B」において、ユーザが、状態210で最初の画像を取り込み、移動局が、状態230における「C」においてタグ付けし、待機状態200に戻る。このプロセスは、シーケンス中の画像ごとに繰り返してもよい。例えば、「D」において、ユーザが2番目の画像を状態210で取り込み、移動局が、「E」における状態230においてタグ付けし、待機状態200に戻る。
【0071】
図9Bは、ロケーション位置が決定される前に画像を取り込むために、決定プロセスを中断する移動局を示している。「A」において、移動局が、状態220でロケーション位置の決定を開始する。(「B」において)移動局が、状態210で最初の画像を取り込むために状態220を中断し、(「C」において)状態220でロケーション位置を決定するために戻る。再び、(「D」において)移動局は、状態220で、2番目の画像を取り込むために、ロケーション位置決定プロセスを中断する。この例では、2番目の画像が取り込まれた後、(「E」において)移動局は、状態220で、ロケーション位置を決定するそのプロセスを完了する。(「F」において)移動局は、2つのタグ付けされていない画像にタグ付けして、アイドル状態200に戻る。
【0072】
図9Cは、画像のシーケンス中の最初の画像が取り込まれる前に獲得されたロケーション位置を使用するように、そして、画像のシーケンスのそれぞれに対して同じロケーション位置を使用するようにコンフィギュレーションされている移動局に対するイベントおよびアクションを要約しているフロー図を示している。処理は、ロケーション位置を決定する状態100において開始する。いったんロケーション位置が状態100において決定されると、移動局は、決定したロケーション位置をメモリに対して保存し、待機状態300に入るか、または、タグ付けされていない画像にタグ付けするために状態330に入る。代替的に、位置が入手不可能である場合、移動局は、将来の予め定められた時間の期間において決定を試行するために、タイマを設定し、待機状態200に入る。決定プロセスの間、ユーザアクションは、移動局が、決定プロセスを中断して、画像を取り込む状態310に入るようにさせてもよい。画像が取り込まれ、ロケーション位置がすでに決定されている場合(これにより、状態330に入る)、画像は取り込まれたが、位置はまだ入手不可能である場合(これにより、状態100に入る)、移動局は、画像を取り込むための待機をタイムアウトするが、画像は取り込まれず、ロケーション位置がすでに保存されている場合(これにより、状態300に入る)、そして、移動局は、画像を取り込むための待機をタイムアウトするが、画像は取り込まれず、位置が保存されていない場合(これにより、状態100に入る)、移動局は状態310を出てもよい。いったん、タグ付けされていない画像が状態330においてタグ付けされると、移動局は、待機状態300に戻る。状態300において待機している間、移動局は、タイムアウトし、状態100に再び入ってもよい。例えば、移動局は、以前に保存されたロケーション位置をリフレッシュするためにタイムアウトしてもよい。1つ以上の取り込まれた画像がタグ付けされておらず、予め定められた時間の期間がまだ過ぎていない場合にも、移動局はタイムアウトすることがあり、これにより、移動局は、別の試行および位置特定を行うことができる。
【0073】
上述したいくつかのコンフィギュレーションは、画像が取り込まれる前に決定されたポジションを移動局が1つ以上の画像にタグ付けすることを提供する。上述したいくつかのコンフィギュレーションは、画像が取り込まれた後に決定されたポジションを移動局が1つ以上の画像にタグ付けすることを提供する。移動局は、画像にタグ付けするために、2つの異なるポジション間で選択を行ってもよい。例えば、移動局は、最後の入手可能なロケーション位置を画像にタグ付けしてもよい。最後のロケーション位置から、画像が取り込まれた時間までの、時間の期間(TIME_PREVIOUS_FIX)を記録してもよい。移動局は、後に、更新されたロケーション位置を決定してもよい。取り込まれた画像から、更新されたロケーション位置までの、時間の期間(TIME_FIX_NEXT)も記録してもよい。この次の期間(TIME_FIX_NEXT)が、以前の期間(TIME_PREVIOUS_FIX)よりも短い場合、移動局は、以前のタグを、この更新されたロケーション位置と置換してもよい。代替的な実施形態では、画像取り込みの時間がロケーション位置の2つの時間の間にある場合、画像取り込みの時間を使用して、2つの連続的なロケーション位置間のロケーションを補間することができる。
【0074】
今説明したように、いくつかの実施形態では、以前に決定されたロケーションが、画像が取り込まれた後に決定されたロケーション位置が、または、2つのロケーション位置の良好な方が、最初の画像にタグ付けされる。いくつかの実施形態では、最初の画像だけに一意的なロケーション位置をタグ付けするモードに入るか否かを、移動局は決定する。例えば、複数の画像を互いから短い時間の量内に取得するスポーツモードでは、移動局は、同じロケーション位置を、取得した画像のすべてに適用してもよい。
【0075】
図10Aおよび図10Bは、本発明のいくつかの実施形態にしたがった、画像にタグ付けするプロセスフローを示している。図10Aは、画像にタグ付けするバッチモードを示しており、ここでは、最後のロケーション位置を使用するように移動局がコンフィギュレーションされている。100において、移動局が、ロケーション位置を決定する。いつか将来の時間において、ユーザは、バッチモード400に入る。バッチモードでは、ユーザは、図5Bで示したような「最後のロケーション位置を使用する」オプションを選択してもよい。移動局は、タグ付けする画像のリスト(例えば、最後の組のタグ付けされていない画像、すべてのタグ付けされていない画像、またはこれらに類するもの)を示す。410において、ユーザは、最後に決定したロケーション位置がタグ付けされることになる1組の画像を選択する。420において、ロケーション位置が、以前に決定されてメモリに保存されていた場合、移動体は、メモリ中に保存されている最後に決定されたロケーション位置をそれぞれの画像にタグ付けする。430において、メモリ中で位置が入手不可能である場合、位置は入手不可能であることを、移動局はユーザに知らせる。代替的に、このようなロケーション位置がメモリ中に存在しないときに、「最後の位置を使用」オプションによる1組の画像にタグ付けするオプションは、このオプションをグレーアウトするように、ユーザに対する表示を変更してもよく、これにより、このオプションは選択不可能になる。
【0076】
代替的に、位置、すなわち地理的インジケータを提供するようにユーザが問い合わせされることがある。例えば、位置が入手不可能である場合、画像が取り込まれたロケーションを記載するようにユーザは入力を促されることがあり(例えば、ユーザは、「Wat Ayuthayya」入力すると、デバイスは、1組の画像に、このテキストをタグ付けすることができる)、これにより、その後、後処理および逆ジオコーディングが可能になるだろう。将来のある時点で、それぞれの画像からのこのテキストは、サーバにポート出力され、このサーバは、ユーザが入力したテキストを、等価GPS決定位置に整合させて変換する。その後、ユーザが入力したテキストに加えて、または、ユーザが入力したテキストの代わりに、画像に位置をタグ付けすることができる。
【0077】
図10Bは、画像にタグ付けするバッチモードを示しており、新しいロケーション位置を得るように移動局がコンフィギュレーションされている。400において、ユーザが、バッチモード400に入る。バッチモードでは、ユーザは、図5Bに示したような「新しい位置を得る」オプションを選択してもよい。410において、ユーザは、次に決定されるロケーション位置がタグ付けされることになる1組の画像を選択する。100において、移動局が、ロケーション位置を決定する。420において、ロケーション位置が決定された場合、移動体は、この決定されたロケーション位置をそれぞれの画像にタグ付けする。430において、位置を決定できなかった場合、移動局は、位置は入手不可能であることをユーザに通知する。
【0078】
したがって、本発明は、特許請求の範囲の精神および範囲内での改良および変更により実施できることを、理解すべきである。記述は、網羅的であることを意図せず、または、開示した正確な形態に本発明を限定することを意図していない。本発明は、改良および変更により実施できることを理解すべきである。
【特許請求の範囲】
【請求項1】
カメラを具備するデバイス中で画像に地理的タグ付けする方法において、
画像を取り込むことと、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定することと、
前記決定したポジションを前記画像にタグ付けすることとを含む方法。
【請求項2】
1つ以上の画像を取り込むことに関連してどの1つ以上のポジションが使用されるかを示す1つ以上のコンフィギュレーション可能なパラメータを使用することをさらに含む請求項1記載の方法。
【請求項3】
前記1つ以上のコンフィギュレーション可能なパラメータのうちの少なくとも1つをユーザによってコンフィギュレーションすることをさらに含む請求項2記載の方法。
【請求項4】
前記1つ以上のコンフィギュレーション可能なパラメータの第1の値は、前記画像を取り込む動作の後に、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第2の値は、前記画像を取り込む動作の前に、前記ポジションを決定する動作が生じることを示す請求項2記載の方法。
【請求項5】
前記1つ以上のコンフィギュレーション可能なパラメータの第1の値は、画像ごとに1度、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第2の値は、1組の画像に対して1度、前記ポジションを決定する動作が生じることを示す請求項4記載の方法。
【請求項6】
前記1つ以上のコンフィギュレーション可能なパラメータのうちの少なくとも1つをユーザによってコンフィギュレーションすることをさらに含み、
前記1つ以上のコンフィギュレーション可能なパラメータの第1の値は、前記画像を取り込む動作の後に、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第2の値は、前記画像を取り込む動作の前に、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第3の値は、前記画像を取り込む動作と同時に、前記ポジションを決定する動作が生じることを示す請求項2記載の方法。
【請求項7】
前記ポジションを決定する動作は、ポジションのシーケンスに依存する請求項1記載の方法。
【請求項8】
前記ポジションを決定する動作は、ポジションのシーケンスの補間からなる請求項1記載の方法。
【請求項9】
前記ポジションを決定する動作は、
スタンドアローンSPSモードと、
支援SPSモードと、
ネットワーク情報モードとのうちの選択された1つに基づいて前記ポジションを決定することを含む請求項1記載の方法。
【請求項10】
前記スタンドアローンSPSモードは、第1のしきい値を満たすSPS信号に基づいて選択され、
前記支援SPSモードは、前記第1のしきい値よりも低い第2のしきい値を満たす前記SPS信号に基づいて、そしてネットワーク情報の利用可能性にさらに基づいて選択され、
前記ネットワーク情報モードは、前記第2のしきい値を満たさない前記SPS信号に基づいて、そして前記ネットワーク情報の前記利用可能性にさらに基づいて選択される請求項9記載の方法。
【請求項11】
前記第1のしきい値は、前記SPS信号の品質を示す請求項10記載の方法。
【請求項12】
前記第1のしきい値は、前記SPS信号の量を示す請求項10記載の方法。
【請求項13】
前記ネットワーク情報は、セルの識別子を含む請求項10記載の方法。
【請求項14】
前記ネットワーク情報は、アクセスポイントの識別子を含む請求項10記載の方法。
【請求項15】
前記画像を取り込む動作は、
ポジションの以前の決定を中断することと、
メモリに対して前記画像を取り込むことと、
前記ポジションを決定する動作を開始することとを含む請求項1記載の方法。
【請求項16】
前記ポジションを決定しようと試行することと、
位置は入手不可能であることを決定することと、
アイドル状態に入ることと、
スタンプ付けされていない画像の存在に基づいて、前記アイドル状態をタイムアウトすることとをさらに含む請求項1記載の方法。
【請求項17】
ロケーション位置をリフレッシュするために、前記アイドル状態をタイムアウトすることをさらに含む請求項1記載の方法。
【請求項18】
未使用のロケーション位置をリフレッシュするために、前記アイドル状態をタイムアウトすることをさらに含む請求項1記載の方法。
【請求項19】
前記ポジションを決定する動作は、地上基地局にそれぞれ関係する複数のロケーションを重み付けすることを含む請求項1記載の方法。
【請求項20】
前記デバイスは、セルラ電話機をさらに含む請求項1記載の方法。
【請求項21】
前記デバイスは、パーソナルナビゲーションデバイスをさらに含む請求項1記載の方法。
【請求項22】
前記画像は、ビデオ画像を含む請求項1記載の方法。
【請求項23】
前記画像は、オーディオトラクトを含む請求項1記載の方法。
【請求項24】
前記画像は、静止画像を含む請求項1記載の方法。
【請求項25】
前記決定したポジションを画像にタグ付けする動作は、
前記画像が取り込まれる前に決定された第1のポジションを前記画像にタグ付けすることと、
前記画像が取り込まれた後に決定された第2のポジションを前記画像にタグ付けすることとを含む請求項1記載の方法。
【請求項26】
前記決定したポジションを画像にタグ付けする動作は、決定したポジションのシーケンスを前記画像にタグ付けすることを含む請求項1記載の方法。
【請求項27】
カメラを具備するデバイス中で画像に地理的スタンプ付けする方法において、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定することと、
前記ポジションを決定する動作の後に、画像を取り込むことと、
前記決定したポジションを前記画像にタグ付けすることとを含む方法。
【請求項28】
前記ポジションを決定する動作は、
スタンドアローンSPSモードと、
支援SPSモードと、
ネットワーク情報モードとのうちの選択された1つに基づいて、前記ポジションを決定することを含む請求項27記載の方法。
【請求項29】
前記スタンドアローンSPSモードは、第1のしきい値を満たすSPS信号に基づいて選択され、
前記支援SPSモードは、前記第1のしきい値よりも低い第2のしきい値を満たす前記SPS信号に基づいて、そしてネットワーク情報の利用可能性にさらに基づいて選択され、
前記ネットワーク情報モードは、前記第2のしきい値を満たさない前記SPS信号に基づいて、そして前記ネットワーク情報の利用可能性にさらに基づいて選択される請求項28記載の方法。
【請求項30】
前記第1のしきい値は、前記SPS信号の品質を示す請求項29記載の方法。
【請求項31】
前記第1のしきい値は、前記SPS信号の量を示す請求項29記載の方法。
【請求項32】
前記ネットワーク情報は、セルの識別子を含む請求項29記載の方法。
【請求項33】
カメラを具備するデバイス中で画像のバッチを地理的スタンプ付けする方法において、
複数の画像を取り込むことと、
前記複数の画像を選択することと、
衛星信号の検出と、ワイヤレスネットワーク信号の検出とに基づいて、ポジションを決定することと、
前記決定したポジションを前記複数の画像にタグ付けすることとを含む方法。
【請求項34】
前記ポジションを決定する動作は、前記複数の画像を選択する動作の前に生じる請求項33記載の方法。
【請求項35】
前記ポジションを決定する動作は、前記複数の画像を選択する動作の後に生じる請求項33記載の方法。
【請求項36】
前記ポジションを決定する動作は、
スタンドアローンSPSモードと、
支援SPSモードと、
ネットワーク情報モードとのうちの選択された1つに基づいて、前記ポジションを決定することを含む請求項33記載の方法。
【請求項37】
前記スタンドアローンSPSモードは、第1のしきい値を満たすSPS信号に基づいて選択され、
前記支援SPSモードは、前記第1のしきい値よりも低い第2のしきい値を満たす前記SPS信号に基づいて、そしてネットワーク情報の利用可能性にさらに基づいて選択され、
前記ネットワーク情報モードは、前記第2のしきい値を満たさない前記SPS信号に基づいて、そして前記ネットワーク情報の前記利用可能性にさらに基づいて選択される請求項36記載の方法。
【請求項38】
前記複数の画像に関連していつポジションが決定されるかを示す1つ以上のコンフィギュレーション可能なパラメータを使用することをさらに含む請求項33記載の方法。
【請求項39】
前記1つ以上のコンフィギュレーション可能なパラメータの第1の値は、前記画像を取り込む動作の後に、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第2の値は、前記画像を取り込む動作の前に、前記ポジションを決定する動作が生じることを示す請求項38記載の方法。
【請求項40】
カメラを具備し、画像に地理的タグ付けするデバイスにおいて、
画像を取り込む手段と、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段と、
前記決定したポジションを前記画像にタグ付けする手段とを具備するデバイス。
【請求項41】
前記ポジションを決定しようと試行する手段と、
位置は入手不可能であることを決定する手段と、
アイドル状態に入る手段と、
スタンプ付けされていない画像の存在に基づいて、前記アイドル状態をタイムアウトする手段とをさらに具備する請求項40記載のデバイス。
【請求項42】
カメラを具備し、画像のバッチを地理的スタンプ付けするデバイスにおいて、
複数の画像を取り込む手段と、
前記複数の画像を選択する手段と、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段と、
前記決定したポジションを前記複数の画像にタグ付けする手段とを具備するデバイス。
【請求項43】
コンピュータ読み取り可能媒体を具備するコンピュータ読み取り可能プロダクトにおいて、
前記コンピュータ読み取り可能媒体は、
少なくとも1つのコンピュータに実行させるためのコードと、
画像を取り込むように少なくとも1つのコンピュータに実行させるためのコードと、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定するように少なくとも1つのコンピュータに実行させるためのコードと、
前記決定したポジションを前記画像にタグ付けするように少なくとも1つのコンピュータに実行させるためのコードとを含むコンピュータ読み取り可能プロダクト。
【請求項44】
前記コンピュータ読み取り可能媒体は、
前記ポジションを決定しようと試行するように少なくとも1つのコンピュータに実行させるためのコードと、
位置は入手不可能であることを決定するように少なくとも1つのコンピュータに実行させるためのコードと、
アイドル状態に入るように少なくとも1つのコンピュータに実行させるためのコードと、
スタンプ付けされていない画像の存在に基づいて、前記アイドル状態をタイムアウトするように少なくとも1つのコンピュータに実行させるためのコードとをさらに含む請求項43記載のコンピュータ読み取り可能プロダクト。
【請求項45】
コンピュータ読み取り可能媒体を具備するコンピュータ読み取り可能プロダクトにおいて、
前記コンピュータ読み取り可能媒体は、
複数の画像を取り込むように少なくとも1つのコンピュータに実行させるためのコードと、
前記複数の画像を選択するように少なくとも1つのコンピュータに実行させるためのコードと、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定するように少なくとも1つのコンピュータに実行させるためのコードと、
前記決定したポジションを前記複数の画像にタグ付けするように少なくとも1つのコンピュータに実行させるためのコードとを含むコンピュータ読み取り可能プロダクト。
【請求項1】
カメラを具備するデバイス中で画像に地理的タグ付けする方法において、
画像を取り込むことと、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定することと、
前記決定したポジションを前記画像にタグ付けすることとを含む方法。
【請求項2】
1つ以上の画像を取り込むことに関連してどの1つ以上のポジションが使用されるかを示す1つ以上のコンフィギュレーション可能なパラメータを使用することをさらに含む請求項1記載の方法。
【請求項3】
前記1つ以上のコンフィギュレーション可能なパラメータのうちの少なくとも1つをユーザによってコンフィギュレーションすることをさらに含む請求項2記載の方法。
【請求項4】
前記1つ以上のコンフィギュレーション可能なパラメータの第1の値は、前記画像を取り込む動作の後に、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第2の値は、前記画像を取り込む動作の前に、前記ポジションを決定する動作が生じることを示す請求項2記載の方法。
【請求項5】
前記1つ以上のコンフィギュレーション可能なパラメータの第1の値は、画像ごとに1度、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第2の値は、1組の画像に対して1度、前記ポジションを決定する動作が生じることを示す請求項4記載の方法。
【請求項6】
前記1つ以上のコンフィギュレーション可能なパラメータのうちの少なくとも1つをユーザによってコンフィギュレーションすることをさらに含み、
前記1つ以上のコンフィギュレーション可能なパラメータの第1の値は、前記画像を取り込む動作の後に、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第2の値は、前記画像を取り込む動作の前に、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第3の値は、前記画像を取り込む動作と同時に、前記ポジションを決定する動作が生じることを示す請求項2記載の方法。
【請求項7】
前記ポジションを決定する動作は、ポジションのシーケンスに依存する請求項1記載の方法。
【請求項8】
前記ポジションを決定する動作は、ポジションのシーケンスの補間からなる請求項1記載の方法。
【請求項9】
前記ポジションを決定する動作は、
スタンドアローンSPSモードと、
支援SPSモードと、
ネットワーク情報モードとのうちの選択された1つに基づいて前記ポジションを決定することを含む請求項1記載の方法。
【請求項10】
前記スタンドアローンSPSモードは、第1のしきい値を満たすSPS信号に基づいて選択され、
前記支援SPSモードは、前記第1のしきい値よりも低い第2のしきい値を満たす前記SPS信号に基づいて、そしてネットワーク情報の利用可能性にさらに基づいて選択され、
前記ネットワーク情報モードは、前記第2のしきい値を満たさない前記SPS信号に基づいて、そして前記ネットワーク情報の前記利用可能性にさらに基づいて選択される請求項9記載の方法。
【請求項11】
前記第1のしきい値は、前記SPS信号の品質を示す請求項10記載の方法。
【請求項12】
前記第1のしきい値は、前記SPS信号の量を示す請求項10記載の方法。
【請求項13】
前記ネットワーク情報は、セルの識別子を含む請求項10記載の方法。
【請求項14】
前記ネットワーク情報は、アクセスポイントの識別子を含む請求項10記載の方法。
【請求項15】
前記画像を取り込む動作は、
ポジションの以前の決定を中断することと、
メモリに対して前記画像を取り込むことと、
前記ポジションを決定する動作を開始することとを含む請求項1記載の方法。
【請求項16】
前記ポジションを決定しようと試行することと、
位置は入手不可能であることを決定することと、
アイドル状態に入ることと、
スタンプ付けされていない画像の存在に基づいて、前記アイドル状態をタイムアウトすることとをさらに含む請求項1記載の方法。
【請求項17】
ロケーション位置をリフレッシュするために、前記アイドル状態をタイムアウトすることをさらに含む請求項1記載の方法。
【請求項18】
未使用のロケーション位置をリフレッシュするために、前記アイドル状態をタイムアウトすることをさらに含む請求項1記載の方法。
【請求項19】
前記ポジションを決定する動作は、地上基地局にそれぞれ関係する複数のロケーションを重み付けすることを含む請求項1記載の方法。
【請求項20】
前記デバイスは、セルラ電話機をさらに含む請求項1記載の方法。
【請求項21】
前記デバイスは、パーソナルナビゲーションデバイスをさらに含む請求項1記載の方法。
【請求項22】
前記画像は、ビデオ画像を含む請求項1記載の方法。
【請求項23】
前記画像は、オーディオトラクトを含む請求項1記載の方法。
【請求項24】
前記画像は、静止画像を含む請求項1記載の方法。
【請求項25】
前記決定したポジションを画像にタグ付けする動作は、
前記画像が取り込まれる前に決定された第1のポジションを前記画像にタグ付けすることと、
前記画像が取り込まれた後に決定された第2のポジションを前記画像にタグ付けすることとを含む請求項1記載の方法。
【請求項26】
前記決定したポジションを画像にタグ付けする動作は、決定したポジションのシーケンスを前記画像にタグ付けすることを含む請求項1記載の方法。
【請求項27】
カメラを具備するデバイス中で画像に地理的スタンプ付けする方法において、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定することと、
前記ポジションを決定する動作の後に、画像を取り込むことと、
前記決定したポジションを前記画像にタグ付けすることとを含む方法。
【請求項28】
前記ポジションを決定する動作は、
スタンドアローンSPSモードと、
支援SPSモードと、
ネットワーク情報モードとのうちの選択された1つに基づいて、前記ポジションを決定することを含む請求項27記載の方法。
【請求項29】
前記スタンドアローンSPSモードは、第1のしきい値を満たすSPS信号に基づいて選択され、
前記支援SPSモードは、前記第1のしきい値よりも低い第2のしきい値を満たす前記SPS信号に基づいて、そしてネットワーク情報の利用可能性にさらに基づいて選択され、
前記ネットワーク情報モードは、前記第2のしきい値を満たさない前記SPS信号に基づいて、そして前記ネットワーク情報の利用可能性にさらに基づいて選択される請求項28記載の方法。
【請求項30】
前記第1のしきい値は、前記SPS信号の品質を示す請求項29記載の方法。
【請求項31】
前記第1のしきい値は、前記SPS信号の量を示す請求項29記載の方法。
【請求項32】
前記ネットワーク情報は、セルの識別子を含む請求項29記載の方法。
【請求項33】
カメラを具備するデバイス中で画像のバッチを地理的スタンプ付けする方法において、
複数の画像を取り込むことと、
前記複数の画像を選択することと、
衛星信号の検出と、ワイヤレスネットワーク信号の検出とに基づいて、ポジションを決定することと、
前記決定したポジションを前記複数の画像にタグ付けすることとを含む方法。
【請求項34】
前記ポジションを決定する動作は、前記複数の画像を選択する動作の前に生じる請求項33記載の方法。
【請求項35】
前記ポジションを決定する動作は、前記複数の画像を選択する動作の後に生じる請求項33記載の方法。
【請求項36】
前記ポジションを決定する動作は、
スタンドアローンSPSモードと、
支援SPSモードと、
ネットワーク情報モードとのうちの選択された1つに基づいて、前記ポジションを決定することを含む請求項33記載の方法。
【請求項37】
前記スタンドアローンSPSモードは、第1のしきい値を満たすSPS信号に基づいて選択され、
前記支援SPSモードは、前記第1のしきい値よりも低い第2のしきい値を満たす前記SPS信号に基づいて、そしてネットワーク情報の利用可能性にさらに基づいて選択され、
前記ネットワーク情報モードは、前記第2のしきい値を満たさない前記SPS信号に基づいて、そして前記ネットワーク情報の前記利用可能性にさらに基づいて選択される請求項36記載の方法。
【請求項38】
前記複数の画像に関連していつポジションが決定されるかを示す1つ以上のコンフィギュレーション可能なパラメータを使用することをさらに含む請求項33記載の方法。
【請求項39】
前記1つ以上のコンフィギュレーション可能なパラメータの第1の値は、前記画像を取り込む動作の後に、前記ポジションを決定する動作が生じることを示し、
前記1つ以上のコンフィギュレーション可能なパラメータの第2の値は、前記画像を取り込む動作の前に、前記ポジションを決定する動作が生じることを示す請求項38記載の方法。
【請求項40】
カメラを具備し、画像に地理的タグ付けするデバイスにおいて、
画像を取り込む手段と、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段と、
前記決定したポジションを前記画像にタグ付けする手段とを具備するデバイス。
【請求項41】
前記ポジションを決定しようと試行する手段と、
位置は入手不可能であることを決定する手段と、
アイドル状態に入る手段と、
スタンプ付けされていない画像の存在に基づいて、前記アイドル状態をタイムアウトする手段とをさらに具備する請求項40記載のデバイス。
【請求項42】
カメラを具備し、画像のバッチを地理的スタンプ付けするデバイスにおいて、
複数の画像を取り込む手段と、
前記複数の画像を選択する手段と、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定する手段と、
前記決定したポジションを前記複数の画像にタグ付けする手段とを具備するデバイス。
【請求項43】
コンピュータ読み取り可能媒体を具備するコンピュータ読み取り可能プロダクトにおいて、
前記コンピュータ読み取り可能媒体は、
少なくとも1つのコンピュータに実行させるためのコードと、
画像を取り込むように少なくとも1つのコンピュータに実行させるためのコードと、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定するように少なくとも1つのコンピュータに実行させるためのコードと、
前記決定したポジションを前記画像にタグ付けするように少なくとも1つのコンピュータに実行させるためのコードとを含むコンピュータ読み取り可能プロダクト。
【請求項44】
前記コンピュータ読み取り可能媒体は、
前記ポジションを決定しようと試行するように少なくとも1つのコンピュータに実行させるためのコードと、
位置は入手不可能であることを決定するように少なくとも1つのコンピュータに実行させるためのコードと、
アイドル状態に入るように少なくとも1つのコンピュータに実行させるためのコードと、
スタンプ付けされていない画像の存在に基づいて、前記アイドル状態をタイムアウトするように少なくとも1つのコンピュータに実行させるためのコードとをさらに含む請求項43記載のコンピュータ読み取り可能プロダクト。
【請求項45】
コンピュータ読み取り可能媒体を具備するコンピュータ読み取り可能プロダクトにおいて、
前記コンピュータ読み取り可能媒体は、
複数の画像を取り込むように少なくとも1つのコンピュータに実行させるためのコードと、
前記複数の画像を選択するように少なくとも1つのコンピュータに実行させるためのコードと、
衛星信号とワイヤレスネットワーク信号とを検出しようとする試行に基づいて、ポジションを決定するように少なくとも1つのコンピュータに実行させるためのコードと、
前記決定したポジションを前記複数の画像にタグ付けするように少なくとも1つのコンピュータに実行させるためのコードとを含むコンピュータ読み取り可能プロダクト。
【図1A】


【図1B】
【図2】
【図3A】
【図3B】
【図4】
【図5A】
【図5B】
【図6A】
【図6B】
【図6C】
【図6D】
【図7A】
【図7B】
【図7C】
【図8A】
【図8B】
【図8C】
【図9A】
【図9B】
【図9C】
【図10A】
【図10B】
【図1B】
【図2】
【図3A】
【図3B】
【図4】
【図5A】
【図5B】
【図6A】
【図6B】
【図6C】
【図6D】
【図7A】
【図7B】
【図7C】
【図8A】
【図8B】
【図8C】
【図9A】
【図9B】
【図9C】
【図10A】
【図10B】
【公開番号】特開2013−85264(P2013−85264A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−264274(P2012−264274)
【出願日】平成24年12月3日(2012.12.3)
【分割の表示】特願2011−533267(P2011−533267)の分割
【原出願日】平成21年10月20日(2009.10.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.WCDMA
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−264274(P2012−264274)
【出願日】平成24年12月3日(2012.12.3)
【分割の表示】特願2011−533267(P2011−533267)の分割
【原出願日】平成21年10月20日(2009.10.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.WCDMA
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]