
マルチ反対称最適制御性能構成を使用する流量比制御装置を含むガス送出方法及びシステム
【課題】単一の質量流量を多数の流れラインに分割するための流量比制御装置を含むガス送出システム用のマルチ反対称最適(MAO)制御アルゴリズムを開示する。
【解決手段】MAO制御アルゴリズムでは、各流れラインには、流れセンサ124及びバルブ126が設けられている。このバルブは、ターゲット流量比設定点を得るため、線型サチュレータと組み合わせたSISOフィードバック制御装置によって積極的に制御される。最適制御性能のため、これらのSISO制御装置及び線型サチュレータは実質的に同じである。各バルブ制御コマンドは、全ての他のバルブ制御コマンドに対してマルチ反対称であるということがわかっている。従って、MAO制御アルゴリズムは、任意の時期に少なくとも一つのバルブが許容可能な最大開放位置にあり、これによって、流量比設定点の所与の組について、最大総バルブコンダクタンスに関して最適解を提供することを保証する。
【解決手段】MAO制御アルゴリズムでは、各流れラインには、流れセンサ124及びバルブ126が設けられている。このバルブは、ターゲット流量比設定点を得るため、線型サチュレータと組み合わせたSISOフィードバック制御装置によって積極的に制御される。最適制御性能のため、これらのSISO制御装置及び線型サチュレータは実質的に同じである。各バルブ制御コマンドは、全ての他のバルブ制御コマンドに対してマルチ反対称であるということがわかっている。従って、MAO制御アルゴリズムは、任意の時期に少なくとも一つのバルブが許容可能な最大開放位置にあり、これによって、流量比設定点の所与の組について、最大総バルブコンダクタンスに関して最適解を提供することを保証する。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、2005年4月21日にジャニュア・ディン、ジョンA.スミス、及びカブー・ザルカー等の名で出願された、本譲受人に譲渡された(代理人事件番号56231−526、MKS−158)、現在継続中の米国特許出願第11/111,646号の一部継続出願である。
【0002】
本開示は、全体として、半導体プロセッシング機器に関し、更に詳細には、汚染のない正確に計量された量のプロセスガスを一つ又はそれ以上のプロセッシングツールの少なくとも二つの場所まで送出するための流量比制御装置に関する。更に詳細には、本開示は、単一のガスボックスからの流れを、一つ又はそれ以上のプロセッシングツールの少なくとも二つの位置に、好ましくは三つ又はそれ以上の位置に分割するためのシステム及び方法に関する。
【背景技術】
【0003】
半導体デバイスの製造では、多くの場合、真空チャンバ等のプロセッシングツールへの1ダースに及ぶガスの送出を注意深く同期すること及び正確に計測することが必要とされる。製造プロセスでは様々な方法が使用されており、多くの別個のプロセッシング工程が必要とされる。この場合、例えば、半導体デバイスの清浄化、研磨、酸化、マスキング、エッチング、ドーピング、又はメタライジングが行われる。使用された工程について、これらの工程の特定の順序及び必要とされる材料は、全て、特定のデバイスの製造に寄与する。
【0004】
従って、ウェーハ製造設備は、一般的には、化学蒸着法、プラズマ蒸着、プラズマエッチング、スパッタリング、及び他の同様のガス製造プロセスが実施される領域を含むように構成されている。プロセッシングツールは、化学蒸着反応器、真空スパッタリング機、プラズマエッチング機、プラズマCVDチャンバ、又は任意の他のデバイス、装置、又はシステムのいずれであっても、様々なプロセスガスが供給されねばならない。ツールには、汚染のない正確に計測した量の純粋なガスが供給されなければならない。
【0005】
代表的なウェーハ製造設備では、ガスは、配管又は導管を介してガス送出システムに連結されたタンクに貯蔵されている。このガス送出システムは、汚染のない正確に計測された量の純粋な不活性の又は反応性のガスを、製造設備のタンクから、プロセッシングツール及び/又はチャンバに送出するためのガスボックスを含む。ガスボックスは、代表的には、複数のガス流ラインを含む。これらのガス流ラインの各々は流れ計測ユニットを含む。この流れ計測ユニットは、バルブ、圧力調整器及びトランスジューサー、質量流量制御装置、フィルタ/ピュアリファイヤー、等を含んでいてもよい。各ガスラインは、分離したガス源に連結するためのそれ自体の入口を有するが、全てのガス経路は、プロセスツールに連結するための単一の出口につながっている。
【0006】
場合によっては、組み合わせたプロセスガスを、単一のツールの多数の位置に、又は多数のプロセッシングツールの間で送出できるように、分割し又は分離する。このような場合には、ガスボックスの単一の出口を多数の位置に二次流れラインを通して連結する。幾つかの用途では、例えば安全上の理由及び他の理由で、上流圧力を大気圧以下に(例えば15PSIAに)保持する必要がある場合には、流量比制御装置を使用し、ガスボックスの出口の一次流れを、予め選択された比に従って、二次流路間で分割する。流れ分割システムの例は、米国特許第4,369,031号、米国特許第5,453,124号、米国特許第6,333,272号、米国特許第6,418,954号、及び米国特許第6,766,260号、公開された米国特許出願第2002/0038669号、及び2005年4月21日にジャニュア・ディン、ジョンA.スミス、及びカブー・ザルカー等の名で出願された、本譲受人に譲渡された(代理人事件番号56231−526、MKS−158)現在継続中の米国特許出願第11/111,646号に記載されている。米国特許第6,766,260号の流量比制御装置は、各二次流れラインが別体の流れセンサ及び制御バルブによって制御されるため、特に興味深いものである。
【0007】
米国特許第6,766,260号に示された種類の流量比制御装置は、初期設定を行った後、所望の分割比に合わせて安定化されるが、流れは安定化に時間を要し、幾つかの用途では、これは満足のいくものではなかった。更に、流量比制御装置の前後の圧力降下が高く、制御装置は、二次流路のうちの一つの下流閉塞を取り扱うには制御性能が乏しかった。更に、システムは、二次流れラインのバルブの固定されたバルブ位置を最初に決定するのが困難であるため、設定が困難であった。更に、二つの二次流れラインを使用する現在の実施例について、流量比制御を行うため、高流バルブ(high flow valve) を固定バルブとし、低流バルブ(low flow valve)を被制御バルブとする必要がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許出願第11/111,646号
【特許文献2】米国特許第4,369,031号
【特許文献3】米国特許第5,453,124号
【特許文献4】米国特許第6,333,272号
【特許文献5】米国特許第6,418,954号
【特許文献6】米国特許第6,766,260号
【特許文献7】米国特許出願第2002/0038669号
【発明の概要】
【発明が解決しようとする課題】
【0009】
これらの従来技術の流量比制御装置は全て、ただ二つの二次流れラインの相対的な流量比を制御するように設計されている。分配を受けるシステムの二つ以上の二次流れラインの相対的流量比を制御しようとする場合には、事態が更に複雑になる。状態空間アプローチ(state space approach) を使用する、線形時不変(linear time invariant)(LTI)システムが提供するダイナミックレンジは不十分であり、制御バルブのバルブ曲線が非線形であるため、一組の線型化モデル係数だけを使用して多チャンネル流量比制御装置(以下、「MCFRC」と呼ぶ)を説明することは、不可能ではないにせよ困難である。更に、LTIシステムは、選択された変数の制御を必要とする。状態変数として使用する上での有力な候補は、圧力、温度、及び流量である。しかしながら、このような変数は常に観察できるわけではない。例えば、熱センサで絶対流量を検出する方法はない。更に、これらの状態変数の推算に利用できる圧力情報はない。最後に、高次の状態空間制御装置は、三つ又はそれ以上のラインを通る流量比を制御する必要がある分布システムに適していない。
【課題を解決するための手段】
【0010】
本開示の一つの特徴によれば、多チャンネルガス送出システムは、一次チャンネルと、少なくとも二つの二次チャンネルと、一次チャンネルを通してガスを受け取り、二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を制御するように、一次チャンネル及び複数の二次チャンネルに連結された流量比制御装置とを含む。
【0011】
本開示の別の特徴によれば、多チャンネルガス送出システムは、一次チャンネルと、少なくとも二つの二次チャンネルと、一次チャンネルを通してガスを受け取り、二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を制御するように、一次チャンネル及び複数の二次チャンネルに連結された流量比制御装置とを含む。流量比制御装置は、各二次チャンネル毎に流れセンサ及びバルブを含む。このバルブは、ターゲット流量比設定点を達成するため、単入力単出力(SISO)フィードバック制御装置及び線型サチュレータによって積極的に制御される。全てのSISOフィードバック制御装置は実質的に同じであり、全ての線型サチュレータは実質的に同じである。
【0012】
更に、本開示の別の特徴によれば、多チャンネルガス送出システムは、ガス入口チャンネル及び少なくとも二つの二次チャンネルと、これらの二次チャンネルの各々を通る流量を制御するように構成された、流れセンサ及びバルブを含む流量計と、少なくとも二つの二次チャンネルの各々を通るガスの流量の、全ての二次チャンネルを通る全組み合わせ流量に対する流量比を制御するように形成されており且つ構成されたマルチ反対称最適(MAO)制御装置とを含み、制御装置は、(a)二次流量の総流量に対する流量比を維持するように、二次流れライン内の質量流量の実質的に最適の制御を提供し、(b)二次流れラインの各々の質量流量を制御し、この制御は、一つの流れライン内の流量が減少し、二次流れの流量比が所定の設定点から外れた場合に、制御装置が、二次流れラインを通る相対的二次流れを調節し、流量比を所定の設定点に戻すように、二次流量の流量比を所定の設定点に維持するように形成されており、バルブのうちの少なくとも一つのバルブは、作動の任意の一つの時期に、実質的に最大の許容可能なバルブコンダクタンス位置を提供し、この際、他のバルブは、対応する二次チャンネルの各々を通る流量比の所定の値を維持するように積極的に制御される。
【0013】
最後に、本開示の更に別の特徴によれば、複数の二次チャンネルの各々を通る一次チャンネルからのガスの流量の、全流量に対する流量比を、任意の時期での流量比設定点{rspi}の所与の組についての実質的に最適の制御解に従って制御するためのシステム及び方法が提供される。この方法は、
(i)二次チャンネルの各々を通る計測された流量比を決定する工程と、
(ii)計測された総流量(QTm)を、二次チャンネルの各々を通る計測された流量の関数として決定する工程と、
(iii)二次チャンネルの各々を通る計測された流量比を、対応する流量比設定点と比較し、このような二次チャンネルの各々のついてエラー信号を発生する工程と、
(iv)エラー信号の各々を対応するSISOフィードバック制御装置に適用し、二次チャンネルの夫々を通るガスの流量を制御するのに使用される対応する制御バルブと関連したバルブ制御コマンドを発生し、対応する二次チャンネルを通る流量比設定点の所与の組を得る工程とを含む。
【0014】
添付図面を参照すると、これらの図では、同じ参照番号を付したエレメントは、同様のエレメントを示す。
【図面の簡単な説明】
【0015】
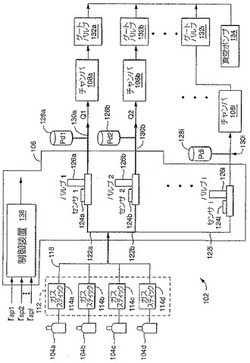
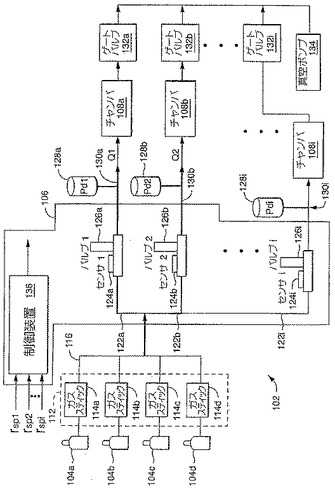
【図1】図1は、夫々のチャンネルを通るガスの流量を、全てのチャンネルを通して送出される総流量に対して所定の流量比で送出するように本開示に従って形成された流量比制御装置を含む、マルチチャンネルガス送出システムの好ましい実施例の概略ブロックダイヤグラムである。
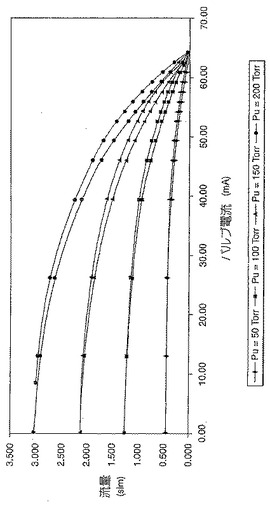
【図2】図2は、代表的な常開のバルブについての、様々な上流圧力での、バルブ制御信号対流量のグラフである。
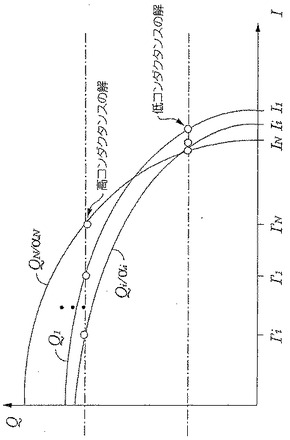
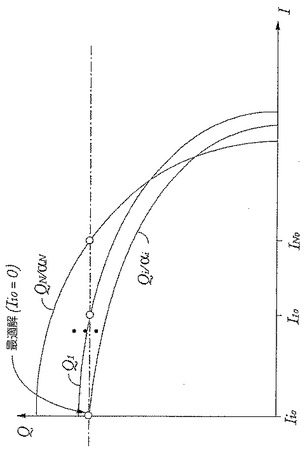
【図3】図3は、マルチチャンネル流量比制御装置(MCFRC)システムの流量比の所与の組についてのマルチバルブ制御解の例のグラフである。
【図4】図4は、図1の実施例に示すようなMCFRC構成に対して得られた最大総許容バルブコンダクタンスを示す、MCFRCシステムの流量比の所与の組についての最適バルブ制御解のグラフである。
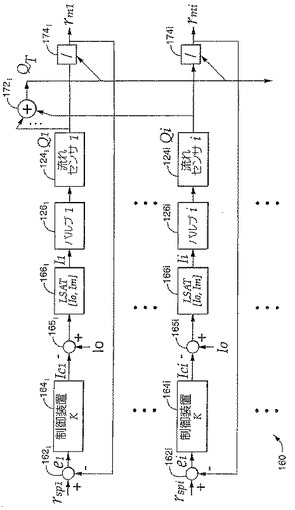
【図5】図5は、複数のチャンネルの各々を通るガスの流量の、全てのチャンネルを通る全組み合わせ流量に対する比を制御するように形成されており且つ構成された好ましいマルチ反対称最適(MAO)制御装置の機能的ブロックダイヤグラムである。
【発明を実施するための形態】
【0016】
図1を参照すると、本開示は、流量比制御装置を含む多チャンネルガス送出システム用の新規な制御アプローチを提供する。流量比制御装置は、多チャンネルガス送出システムの二次流路即ちチャンネルの各々を通るガスの流量の、全流量に対する比を正確に制御するように構成されている。制御システム及び制御方法は、汚染がない正確に計量された量のプロセスガス及びパージガスを半導体プロセスツール、チャンバ、及び/又は他のシステム、装置、及びデバイスに送出するための計量システムとともに使用するようになっている。制御システム及び制御方法は、単一のガス流を、比較的高い上流圧力を必要とせずに、予め選択された比の既知の正確な相対的な値で多数の二次流に分割するという利点を提供する。多チャンネルガス送出システム102の一部として図1に参照番号106で示す流量比制御装置は、例えば多くのプロセスガス及びパージガスを含む個々のガス又は多数のガスの混合物を、例えば参照番号104a、104b、104c、104dで示すガス供給部(例えばガスタンク)から選択的に受け取る。ガスボックス112は、ガス混合物を流量比制御装置106に供給する。流量比制御装置106は、プロセスチャンバ108a、108b、・・・、108iの夫々に連結された(別の態様では、ガスを計量して、単一のプロセスチャンバ及び/又は他のプロセスツールの様々なインジェクター又は領域に供給できる)状態で示してある。ガスボックス112は、複数のガススティック、例えば参照番号114a、114b、114c、及び114dを付したガススティックを含む。各ガススティックは、好ましくは、対応するガス供給部104に流動学的に連結されている。これは、対応するガス供給部104からのガスの流量を個々に制御するためである。図1には、四つのガス供給部104及び対応するガススティック114が示してあるが、ガス供給部104及びガススティック114の数は任意である(一つであってもよい)。各ガススティック114は、例えば、米国特許第6,418,954号に示すように、質量流量制御装置(MFC)、MFCの前方に位置決めされたバルブ、及びMFCの後方に位置決めされたバルブを含む。ガススティック114は、各々、制御可能なガス通路を提供し、そのため、汚染がない正確に計量された量のガス又はガスの組み合わせを流量比制御装置106に供給でき、次いでプロセスチャンバ108a、108b、・・・、108iに予め選択された流量比で正確に分離/分割する。図示してないけれども、ガススティック114の各々には、ガスを監視し又は制御するための、フィルタ、ピュアリファイヤー、圧力トランスジューサー、制御装置、等のこの他の構成要素が設けられていてもよい。ガススティック114は、例えば、各ガススティックからのガス流を、ガスボックスから離れる前に混合できるように、出口マニホールド116に互いに連結されている。出口マニホールド116は、流量比制御装置106に連結されている。
【0017】
流量比制御装置106は、二つ又はそれ以上の流路即ちライン122a、122b、・・・122iを含む。各流路は、センサ124及びバルブ126を含む。センサ124は、各流路を通る質量流量を制御するように、バルブ126の制御で使用するための流量信号を発生する。センサ124及びバルブ126は、かくして、各流路の夫々の出力質量流量Q1、Q2、・・・Qi、・・・Qnを制御する上で互いに使用される。流量比を、以下の数1に定義する。
【0018】
【数1】

【0019】
ここで、ri は、ライン122iの流量比であり、Qi は、ライン122iを通る流量であり、QT は、以下の数2に示すように定義された全ての流れライン122の総流量である。
【0020】
【数2】
【0021】
数1及び数2によれば、すべての流量比の和は1に等しく、これは以下の数3に示すように表現できる。
【0022】
【数3】
【0023】
本明細書中に説明した実施例では、制御バルブ126a、126b、・・・126iは常開のバルブであるが、開示のシステムは、全てが常閉のバルブであるように設計されていてもよいし、これらの二種類のバルブの組み合わせを含んでいてもよいということは理解されるべきである。各流路の出口ライン130a、130b、・・・130iは、対応するプロセスツールに連結されている。これらのプロセスツールは、図1では、夫々、プロセッシングチャンバ108a、108b、・・・108iである。これらのチャンバの出口は、好ましくはゲートバルブ132a、132b、・・・132iの形態の制御バルブに連結されている。これらのゲートバルブは、ガスをタンクからチャンバを通して引き出すのに使用するため、一つ又はそれ以上の真空ポンプ134と流体連通している。別の態様では、出口ラインの夫々を単一のプロセスツールの同数の位置に連通していてもよいし、二つ又はそれ以上のプロセスツールの各々の一つ又はそれ以上の位置にしていてもよい。制御装置136は、とりわけ、各ライン122iの一つ毎に流量比設定点入力rspi を受け取る。流量比設定点入力rspi は、下文で更に明らかになるように、総流量QT に対するライン122iの流量の流量比の予め選択された値即ち設定点である。制御装置は、とりわけ、ライン122a、122b、・・・122nの各々を通る(総流量に対する)質量流量比を、夫々の設定点に制御し維持するように形成されている。
【0024】
図1のMCFRCシステムは、したがって、二次流れラインの各々に提供される流量比及び流量について迅速な整定時間を提供し、流量比設定点の所与の組について、MCFRCシステムを通る圧力降下を最小にするように分析され、モデル化される。流量及び流量比についての整定時間は、以下の数4に定義するMCFRCシステムの時定数τpと比例するということがわかる。
【0025】
【数4】
【0026】
ここで、Vu は、MCFRCシステムの上流容積である。CT は、以下の数4に定義するMCFRCシステムの総バルブコンダクタンスである。
【0027】
【数5】
【0028】
ここで、Ci(Ii)は、バルブ126iのバルブコンダクタンスであり、これは、バルブ電流Ii の関数である。一般的にはバルブコンダクタンスCi は、以下の数6によって決定できる。
【0029】
【数6】
【0030】
ここで、Pu は、MCFRCシステムの上流圧力である。更に、上流圧力Pu は以下の数7によって決定できるということがわかる。
【0031】
【数7】
【0032】
数4及び数7からわかるように、流量及び流量比に対して整定時間を短くするため、及び上流圧力を最小にするため、従って、MCFRCシステムを通る圧力降下を最小にするため、MCFRCシステムの総バルブコンダクタンスCT を最大にしなければならない。従って、制御アルゴリズムによって、任意の時期に、流量比設定点の所与の組に対して総バルブコンダクタンスを最大にできる場合には、流量比制御装置は、流量及び流量比に対する整定時間を最も速くし、流量比制御装置を通る圧力降下を最小にすること関して最適の制御性能を達成する。
【0033】
下文に示すように、常開のバルブを持つMCFRCシステムの流量比設定点の所与の組{ri} についての最大総バルブコンダクタンスに関し、一つの及び唯一の最適の解が存在する。この結果は、常閉のバルブを持つMCFRCシステムにも適用される。図2は、二次流れラインの各々に位置決めされ得る種類の典型的な常開のバルブについてのバルブ制御電流Iiに対する流量Qiのグラフである。バルブ電流の上下の計測値を含む例示の四組のバルブ曲線を、四つの上流圧力50トール、100トール、150トール、及び200トールでの代表的な常開のバルブについて示すが、下流圧力はほぼ0トールである。図示のように、常開のバルブについては、バルブコンダクタンスは、バルブ電流の増大に従って減少する。I=0で、即ちこの常開のバルブについてバルブが全開で最大バルブコンダクタンスが得られる。
【0034】
補助流量比(auxiliary flow ratios)即ちαiは、以下の数8に示すように定義される。
【0035】
【数8】
【0036】
ここで、αi は、流れチャンネルiと流れチャンネルlの間の流量比である(Ql≠0と仮定する)。流量比の所与の組{ri}は、対応する補助流量比の組{αi}を提供する。図3は、バルブ電流(Ii)に対してプロットした変更流量(Qi/αi)の全ての変更バルブ曲線を示す。図3に示すように、横線が全ての変更バルブ曲線と交差する場合には、交点は、数9−1を満たさなければならない。
【0037】
【数9−1】
【0038】
これは、まさに、補助流量比の所与の組{αi}、又は流量比の所与の組{ri}を満たす状態である。交点と対応するバルブ電流の組{Ii} は、MCFRCシステムについての、流量比の所与の組{ri} を得るための解を提供する。図示のように、これらの変更バルブ曲線と任意の横線との交点は、流量比の所与の組{ri} を満たすためのバルブ電流{Ii} の一組の解を提供する。換言すると、MCFRCシステムについて、流量比の所与の組を得る上で多数の解が存在する。これらの多数の解間の相違は、総バルブコンダクタンスCT である。図3に示すように、横線が高ければ高い程、総バルブコンダクタンスが高くなる。横線が全ての変更バルブ曲線と交点を持たなくなるまで横線の高さを上げることによって総バルブコンダクタンス解を高くする。
【0039】
図4は、MCFRCシステムについての、流量比の所与の組{ri} を得るための最大総バルブコンダクタンスに関する最適解を示す。最適解は、バルブjが全開位置にあるとき、即ちIj=0 のときに得られる。横線の高さをこれ以上上げると解が得られなくなる。これは、有効解が、横線と全ての変更バルブ曲線との交点であるためである。従って、図4に示すように、MCFRCシステムに関し、流量比の所与の組{ri} を得るための一つの及び唯一の最適解が存在する。最適解は、バルブjが全開位置にあるとき、即ちIj=0 のときに得られる。他方、MCFRCシステムの一つのバルブが全開位置にあり、即ちIj=0 であり、流量比の所与の組{ri} が得られた場合には、MCFRCシステムは、最大総バルブコンダクタンスの最適解の状態にある。
【0040】
下文において、図5に示すマルチ反対称最適(MAO)制御アルゴリズムは、任意の所与の時期で最適解がある、即ち常開のバルブを持つMCFRCシステムについてバルブが常に全開位置にある、即ちIi=0 であるように示してある。この結果は、常閉のバルブを持つMCFRCシステムにも適用される。
【0041】
好ましくは、MCFRCシステムは、全てのバルブ126がMCFRC制御装置136で同時に制御されるように形成されている。MCFRC制御装置136は、ホスト制御装置140から流量比設定点の組{rspi} を受け取り、計測された実際の流量比{rmi}及び他のMCFRC状態情報を報告し、ホスト制御装置140に戻す。MCFRC制御装置136で実行されるMAO制御アルゴリズムの詳細を図5に示す。流れセンサ124の出力{Qmi}を集め、加算することによって、計測した総流量QTmを接合部172のところに発生する。次いで、計測された流量比{rmi=Qmi/QTm}を計算し、流量比設定点の組{rspi} と比較し、エラー信号{ei=rspi−rmi}を発生する。次いで、エラー信号{ei} を同じ信号入力及び信号出力(SISO)制御装置164に供給し{Ki(s)} 、バルブ制御コマンド{Ici}を発生する。制御装置164は、PID制御装置、進み遅れ制御装置、モデルベースト制御装置等の任意の種類のSISO制御装置であってもよいが、SISO制御装置164は、最適の性能結果を得るため、同じ、即ち種類及び制御パラメータが同じである。バルブ126に加えられる最終的バルブ駆動電流{Ii}は、第1に接合部165のところで最適のバイアス電流Io によってバルブ制御コマンド{Ici}を差し引くことによって得られ、次いで、線型サチュレータ166によって下限Io及び上限Imで修正する。線型サチュレータ166は、各々、以下の数9に示すように定義される。
【数9】
【0042】
ここで、Ioは下飽和限度として使用され、Imは上飽和限度として使用される。
MAO制御アルゴリズムの線型サチュレータ166は、ソフトウェア又はハードウェアのいずれかで実施できる。多くのバルブ駆動回路は、下出力限度及び上出力限度を有する。最適バイアス電流Ioが、常開のバルブについての下出力限度又は常閉のバルブについての上出力限度として加えられた場合には、線型サチュレータ166をファームウェア又はソフトウェアで実施する必要はない。
【0043】
最適バイアス電流Ioは、最大バルブコンダクタンスを提供する許容可能な電流である。図2に示す常開のバルブについて、最適バイアス電流はゼロである。即ち、Io=0である。理解されるように、各流れチャンネルは、流れセンサ、SISO制御装置、及び流れバルブを含む同じフィードバック制御ループ構造を有する。
【0044】
図5に示すMAO制御アルゴリズムは、任意の時期に流量比設定点の所与の組{rspi}についての最適制御解を得ることができるように示すことができる。即ち、常に、常開のバルブを持つMCFRCシステムについて全開位置即ちIj=0 にあるバルブ126jがある。線型サチュレータ166の前の任意の流れチャンネルiのバルブ制御コマンドIci(i=1、2、・・・N)は、数10に示すように、全ての他のバルブ制御コマンドIcj(j=1、2、・・・N、j≠i)の和に対して反対称であるということがわかる。
【0045】
【数10】
【0046】
この特性をマルチ反対称(multiple antisymmetry)と呼ぶ。更に、線型サチュレータ166の後に少なくとも一つのバルブ駆動電流Ik が存在し、この電流が、数11に示すように、最適バイアス電流Io と等しいということがわかる。
【0047】
【数11】
【0048】
従って、図5に示す制御アルゴリズムを、本明細書中、「マルチ反対称最適」(又は「MAO」)制御と呼ぶ。MAO制御アルゴリズムは、MCFRCシステムについて、任意の時期に最適解が得られることを保証する。上文中に論じたように、最適解では、総バルブコンダクタンスが最大であり、整定時間及びMCFRCの前後の圧力降下の両方が最小である。
【0049】
MAO制御アルゴリズムは、いずれのバルブが全開位置にあるのかを明らかに表示しないが、全ての流れバルブのうちの少なくとも一つのバルブが全開位置にあることを保証する。これは、上文中に論じたように、上掲の数10のマルチ反対称特性のためである。図1に示すように、全ての流れバルブは、同じ入口122を共有するため、上流圧力条件が同じである。全ての流れバルブの下流圧力条件が同じである場合には、最高流量のバルブが全開位置になければならない。しかしながら、低流れチャンネルのうちの一つで重大な下流閉塞の問題点が生じた場合、MAO制御アルゴリズムは、当該下流閉塞流れチャンネルの流れバルブを駆動し、更に大きく開放する。これは、必要であれば、全開位置で停止する。流量比設定点を満たさない場合には、MAO制御アルゴリズムは、最高流れバルブを、その全開位置から比較的閉鎖された位置まで駆動する。これは、ターゲット流量比設定点に達するためである。このようにして、MAO制御アルゴリズムは、様々な流れチャンネル間の重大な下流閉塞の問題点を自動的に取り扱うことができる。
【0050】
MAO制御アルゴリズムは、2チャンネル流量比制御装置の特殊な場合にも適用される。このような構成は、2005年4月21日にジャニュア・ディン、ジョンA.スミス、及びカブー・ザルカー等の名で出願された、本譲受人に譲渡された(代理人事件番号56231−526、MKS−158)、現在継続中の米国特許出願第11/111,646号に記載されたDAO制御アルゴリズムと異なる。現在継続中の米国特許出願第11/111,646号に開示されたDAO制御アルゴリズムは、両二次チャンネルを制御するため、単一のSISO制御装置を使用するが、本発明のMAO制御アルゴリズムは、最適の性能を得るため、二つの二次チャンネルの各々に一つづつの二つの同じ制御装置を必要とする。MAO制御アルゴリズム又はDAO制御アルゴリズムのいずれについて、バルブ制御コマンドIc1及びIc2は、数14に示す反対称特性を有する。
【0051】
【数14】
【0052】
MAO制御アルゴリズムを2チャンネル流量比制御装置に適用した場合、二つのSISO制御装置が同じである。数14によって示唆されているように、MAO制御アルゴリズムに必要なSISO制御装置の一方を取り外し、負の制御出力コマンド−Ic を他方のバルブ制御ループに逸らすことができる。このようにして、現在継続中の米国特許出願第11/111,646号に記載された2チャンネル流量比制御装置については、MAO制御アルゴリズムはDAO制御アルゴリズムと同じになる。しかしながら、以下に説明するように、例えば最適以下の性能を許容できる場合には、二つの異なるSISO制御装置又は二つの異なる線型サチュレータを使用しようとする場合がある。
【0053】
かくして、MAO制御装置は、下記の事項を提供するように形成される。即ち、
(a)総流量に対する二次流れの流量比を所定の設定点流量比に維持するように、二次流れラインの質量流量の反対称最適制御を行い、
(b)少なくとも一つのバルブが最適バルブ電流Ioにあり、これにより作動の任意の一つの時点で最大許容可能バルブコンダクタンス点を提供し、この際、他方のバルブは、流量比の所定の設定値を維持するように能動的に制御され、
(c)一方の流れラインの流れが減少したため、二次流れの流量比が、予め選択された設定点からずれた場合、制御装置が、二次流れラインを通る二次流れを相対的に調節し、流量比を予め選択された設定点に戻すように、二次流れの流量比を所定の設定点に維持するように二次流れラインの質量流量を制御する。
【0054】
かくして、本開示に従って提供された新規であり且つ改良されたガス送出システム及び方法を説明した。本明細書中に説明した例示の実施例は、限定でなく例示として提供されたものであって、当業者は、添付の特許請求の範囲に記載された本開示の広い特徴から、その精神及び範囲のいずれからも逸脱することなく、様々な変形、変更、及び代替を行うことができる。例えば、本明細書中の大部分において、バルブを常開のバルブとして説明したが、常閉のバルブであってもよい。更に、上文中に説明したように最適制御性能について、制御装置164は同じSISOフィードバック制御装置である。即ち、これらの制御装置は、同じ種類であり、同じ制御パラメータを有する。更に、最適制御性能について同じ線型サチュレータを必要とする。しかしながら、多くの用途において、最適下限の、即ち実質的に最適の性能を受け入れることができ、そのため、SISOフィードバック制御装置、及び/又は線型サチュレータは同じでなく、及び/又は作動中にバルブのいずれも完全には開放しない(この場合、最大バルブコンダクタンスは提供されない)。本明細書中では、「実質的に最適」という用語は、最適性能に数%足りず、100%よりも低いけれども、所望の結果を得るのに十分に高いということを意味する。例えば、このような実質的に最適の性能は、幾つかの用途では、最適値の95%であってもよく、それでも満足のいく結果を提供する。二つの二次流れラインだけの流量比を制御する場合には、SISOフィードバック制御装置及び/又は線型サチュレータは同じである必要がなく、実質的に同じであるに過ぎず、様々な実施を提供する二つのフィードバック制御装置が必要とされる。これらの二つのフィードバック制御装置は、現在継続中の米国特許出願第11/111,646号に開示されたDAOと異なる態様で作動する。
【0055】
本明細書中に開示した本開示のガス送出システム及び方法、及びその全てのエレメントが、添付の特許請求の範囲のうちの少なくとも一つの範囲内に含まれる。本開示のシステム及び方法のエレメントのうち、特許請求の範囲から外されるものはなく、或いは特許請求の範囲の解釈を必然的に制限しようとするものはない。これらの特許請求の範囲において、単数のエレメントに対する言及は、特段の記載のない限り、「一つ及び唯一の」を意味しようとするものではなく、むしろ、「一つ又はそれ以上の」を意味する。本開示に亘って説明した様々な実施例のエレメントの構造的に及び機能的に等価の、当業者に現在周知の又は後に知られるようになる全てのものは、特に、本明細書の開示の一部とされ、特許請求の範囲に含まれる。更に、本明細書中に開示されたものは、こうした開示が特許請求の範囲に明快に記載されているかどうかに関わらず、公共に帰せられるものではない。特許請求の範囲に記載されたエレメントは、「ための手段」という言い方を使用して言及されない限り、又は方法についての特許請求の範囲の場合に「ための工程」という言い方を使用して言及されない限り、35U.S.C.§112第6項の下で解釈されるべきではない。
【符号の説明】
【0056】
102 多チャンネルガス送出システム
104 ガス供給部
106 流量比制御装置
108 プロセスチャンバ
112 ガスボックス
114 ガススティック
116 出口マニホールド
122 流路即ちライン
126 バルブ
130 出口ライン
132 ゲートバルブ
134 真空ポンプ
【技術分野】
【0001】
本願は、2005年4月21日にジャニュア・ディン、ジョンA.スミス、及びカブー・ザルカー等の名で出願された、本譲受人に譲渡された(代理人事件番号56231−526、MKS−158)、現在継続中の米国特許出願第11/111,646号の一部継続出願である。
【0002】
本開示は、全体として、半導体プロセッシング機器に関し、更に詳細には、汚染のない正確に計量された量のプロセスガスを一つ又はそれ以上のプロセッシングツールの少なくとも二つの場所まで送出するための流量比制御装置に関する。更に詳細には、本開示は、単一のガスボックスからの流れを、一つ又はそれ以上のプロセッシングツールの少なくとも二つの位置に、好ましくは三つ又はそれ以上の位置に分割するためのシステム及び方法に関する。
【背景技術】
【0003】
半導体デバイスの製造では、多くの場合、真空チャンバ等のプロセッシングツールへの1ダースに及ぶガスの送出を注意深く同期すること及び正確に計測することが必要とされる。製造プロセスでは様々な方法が使用されており、多くの別個のプロセッシング工程が必要とされる。この場合、例えば、半導体デバイスの清浄化、研磨、酸化、マスキング、エッチング、ドーピング、又はメタライジングが行われる。使用された工程について、これらの工程の特定の順序及び必要とされる材料は、全て、特定のデバイスの製造に寄与する。
【0004】
従って、ウェーハ製造設備は、一般的には、化学蒸着法、プラズマ蒸着、プラズマエッチング、スパッタリング、及び他の同様のガス製造プロセスが実施される領域を含むように構成されている。プロセッシングツールは、化学蒸着反応器、真空スパッタリング機、プラズマエッチング機、プラズマCVDチャンバ、又は任意の他のデバイス、装置、又はシステムのいずれであっても、様々なプロセスガスが供給されねばならない。ツールには、汚染のない正確に計測した量の純粋なガスが供給されなければならない。
【0005】
代表的なウェーハ製造設備では、ガスは、配管又は導管を介してガス送出システムに連結されたタンクに貯蔵されている。このガス送出システムは、汚染のない正確に計測された量の純粋な不活性の又は反応性のガスを、製造設備のタンクから、プロセッシングツール及び/又はチャンバに送出するためのガスボックスを含む。ガスボックスは、代表的には、複数のガス流ラインを含む。これらのガス流ラインの各々は流れ計測ユニットを含む。この流れ計測ユニットは、バルブ、圧力調整器及びトランスジューサー、質量流量制御装置、フィルタ/ピュアリファイヤー、等を含んでいてもよい。各ガスラインは、分離したガス源に連結するためのそれ自体の入口を有するが、全てのガス経路は、プロセスツールに連結するための単一の出口につながっている。
【0006】
場合によっては、組み合わせたプロセスガスを、単一のツールの多数の位置に、又は多数のプロセッシングツールの間で送出できるように、分割し又は分離する。このような場合には、ガスボックスの単一の出口を多数の位置に二次流れラインを通して連結する。幾つかの用途では、例えば安全上の理由及び他の理由で、上流圧力を大気圧以下に(例えば15PSIAに)保持する必要がある場合には、流量比制御装置を使用し、ガスボックスの出口の一次流れを、予め選択された比に従って、二次流路間で分割する。流れ分割システムの例は、米国特許第4,369,031号、米国特許第5,453,124号、米国特許第6,333,272号、米国特許第6,418,954号、及び米国特許第6,766,260号、公開された米国特許出願第2002/0038669号、及び2005年4月21日にジャニュア・ディン、ジョンA.スミス、及びカブー・ザルカー等の名で出願された、本譲受人に譲渡された(代理人事件番号56231−526、MKS−158)現在継続中の米国特許出願第11/111,646号に記載されている。米国特許第6,766,260号の流量比制御装置は、各二次流れラインが別体の流れセンサ及び制御バルブによって制御されるため、特に興味深いものである。
【0007】
米国特許第6,766,260号に示された種類の流量比制御装置は、初期設定を行った後、所望の分割比に合わせて安定化されるが、流れは安定化に時間を要し、幾つかの用途では、これは満足のいくものではなかった。更に、流量比制御装置の前後の圧力降下が高く、制御装置は、二次流路のうちの一つの下流閉塞を取り扱うには制御性能が乏しかった。更に、システムは、二次流れラインのバルブの固定されたバルブ位置を最初に決定するのが困難であるため、設定が困難であった。更に、二つの二次流れラインを使用する現在の実施例について、流量比制御を行うため、高流バルブ(high flow valve) を固定バルブとし、低流バルブ(low flow valve)を被制御バルブとする必要がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許出願第11/111,646号
【特許文献2】米国特許第4,369,031号
【特許文献3】米国特許第5,453,124号
【特許文献4】米国特許第6,333,272号
【特許文献5】米国特許第6,418,954号
【特許文献6】米国特許第6,766,260号
【特許文献7】米国特許出願第2002/0038669号
【発明の概要】
【発明が解決しようとする課題】
【0009】
これらの従来技術の流量比制御装置は全て、ただ二つの二次流れラインの相対的な流量比を制御するように設計されている。分配を受けるシステムの二つ以上の二次流れラインの相対的流量比を制御しようとする場合には、事態が更に複雑になる。状態空間アプローチ(state space approach) を使用する、線形時不変(linear time invariant)(LTI)システムが提供するダイナミックレンジは不十分であり、制御バルブのバルブ曲線が非線形であるため、一組の線型化モデル係数だけを使用して多チャンネル流量比制御装置(以下、「MCFRC」と呼ぶ)を説明することは、不可能ではないにせよ困難である。更に、LTIシステムは、選択された変数の制御を必要とする。状態変数として使用する上での有力な候補は、圧力、温度、及び流量である。しかしながら、このような変数は常に観察できるわけではない。例えば、熱センサで絶対流量を検出する方法はない。更に、これらの状態変数の推算に利用できる圧力情報はない。最後に、高次の状態空間制御装置は、三つ又はそれ以上のラインを通る流量比を制御する必要がある分布システムに適していない。
【課題を解決するための手段】
【0010】
本開示の一つの特徴によれば、多チャンネルガス送出システムは、一次チャンネルと、少なくとも二つの二次チャンネルと、一次チャンネルを通してガスを受け取り、二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を制御するように、一次チャンネル及び複数の二次チャンネルに連結された流量比制御装置とを含む。
【0011】
本開示の別の特徴によれば、多チャンネルガス送出システムは、一次チャンネルと、少なくとも二つの二次チャンネルと、一次チャンネルを通してガスを受け取り、二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を制御するように、一次チャンネル及び複数の二次チャンネルに連結された流量比制御装置とを含む。流量比制御装置は、各二次チャンネル毎に流れセンサ及びバルブを含む。このバルブは、ターゲット流量比設定点を達成するため、単入力単出力(SISO)フィードバック制御装置及び線型サチュレータによって積極的に制御される。全てのSISOフィードバック制御装置は実質的に同じであり、全ての線型サチュレータは実質的に同じである。
【0012】
更に、本開示の別の特徴によれば、多チャンネルガス送出システムは、ガス入口チャンネル及び少なくとも二つの二次チャンネルと、これらの二次チャンネルの各々を通る流量を制御するように構成された、流れセンサ及びバルブを含む流量計と、少なくとも二つの二次チャンネルの各々を通るガスの流量の、全ての二次チャンネルを通る全組み合わせ流量に対する流量比を制御するように形成されており且つ構成されたマルチ反対称最適(MAO)制御装置とを含み、制御装置は、(a)二次流量の総流量に対する流量比を維持するように、二次流れライン内の質量流量の実質的に最適の制御を提供し、(b)二次流れラインの各々の質量流量を制御し、この制御は、一つの流れライン内の流量が減少し、二次流れの流量比が所定の設定点から外れた場合に、制御装置が、二次流れラインを通る相対的二次流れを調節し、流量比を所定の設定点に戻すように、二次流量の流量比を所定の設定点に維持するように形成されており、バルブのうちの少なくとも一つのバルブは、作動の任意の一つの時期に、実質的に最大の許容可能なバルブコンダクタンス位置を提供し、この際、他のバルブは、対応する二次チャンネルの各々を通る流量比の所定の値を維持するように積極的に制御される。
【0013】
最後に、本開示の更に別の特徴によれば、複数の二次チャンネルの各々を通る一次チャンネルからのガスの流量の、全流量に対する流量比を、任意の時期での流量比設定点{rspi}の所与の組についての実質的に最適の制御解に従って制御するためのシステム及び方法が提供される。この方法は、
(i)二次チャンネルの各々を通る計測された流量比を決定する工程と、
(ii)計測された総流量(QTm)を、二次チャンネルの各々を通る計測された流量の関数として決定する工程と、
(iii)二次チャンネルの各々を通る計測された流量比を、対応する流量比設定点と比較し、このような二次チャンネルの各々のついてエラー信号を発生する工程と、
(iv)エラー信号の各々を対応するSISOフィードバック制御装置に適用し、二次チャンネルの夫々を通るガスの流量を制御するのに使用される対応する制御バルブと関連したバルブ制御コマンドを発生し、対応する二次チャンネルを通る流量比設定点の所与の組を得る工程とを含む。
【0014】
添付図面を参照すると、これらの図では、同じ参照番号を付したエレメントは、同様のエレメントを示す。
【図面の簡単な説明】
【0015】
【図1】図1は、夫々のチャンネルを通るガスの流量を、全てのチャンネルを通して送出される総流量に対して所定の流量比で送出するように本開示に従って形成された流量比制御装置を含む、マルチチャンネルガス送出システムの好ましい実施例の概略ブロックダイヤグラムである。
【図2】図2は、代表的な常開のバルブについての、様々な上流圧力での、バルブ制御信号対流量のグラフである。
【図3】図3は、マルチチャンネル流量比制御装置(MCFRC)システムの流量比の所与の組についてのマルチバルブ制御解の例のグラフである。
【図4】図4は、図1の実施例に示すようなMCFRC構成に対して得られた最大総許容バルブコンダクタンスを示す、MCFRCシステムの流量比の所与の組についての最適バルブ制御解のグラフである。
【図5】図5は、複数のチャンネルの各々を通るガスの流量の、全てのチャンネルを通る全組み合わせ流量に対する比を制御するように形成されており且つ構成された好ましいマルチ反対称最適(MAO)制御装置の機能的ブロックダイヤグラムである。
【発明を実施するための形態】
【0016】
図1を参照すると、本開示は、流量比制御装置を含む多チャンネルガス送出システム用の新規な制御アプローチを提供する。流量比制御装置は、多チャンネルガス送出システムの二次流路即ちチャンネルの各々を通るガスの流量の、全流量に対する比を正確に制御するように構成されている。制御システム及び制御方法は、汚染がない正確に計量された量のプロセスガス及びパージガスを半導体プロセスツール、チャンバ、及び/又は他のシステム、装置、及びデバイスに送出するための計量システムとともに使用するようになっている。制御システム及び制御方法は、単一のガス流を、比較的高い上流圧力を必要とせずに、予め選択された比の既知の正確な相対的な値で多数の二次流に分割するという利点を提供する。多チャンネルガス送出システム102の一部として図1に参照番号106で示す流量比制御装置は、例えば多くのプロセスガス及びパージガスを含む個々のガス又は多数のガスの混合物を、例えば参照番号104a、104b、104c、104dで示すガス供給部(例えばガスタンク)から選択的に受け取る。ガスボックス112は、ガス混合物を流量比制御装置106に供給する。流量比制御装置106は、プロセスチャンバ108a、108b、・・・、108iの夫々に連結された(別の態様では、ガスを計量して、単一のプロセスチャンバ及び/又は他のプロセスツールの様々なインジェクター又は領域に供給できる)状態で示してある。ガスボックス112は、複数のガススティック、例えば参照番号114a、114b、114c、及び114dを付したガススティックを含む。各ガススティックは、好ましくは、対応するガス供給部104に流動学的に連結されている。これは、対応するガス供給部104からのガスの流量を個々に制御するためである。図1には、四つのガス供給部104及び対応するガススティック114が示してあるが、ガス供給部104及びガススティック114の数は任意である(一つであってもよい)。各ガススティック114は、例えば、米国特許第6,418,954号に示すように、質量流量制御装置(MFC)、MFCの前方に位置決めされたバルブ、及びMFCの後方に位置決めされたバルブを含む。ガススティック114は、各々、制御可能なガス通路を提供し、そのため、汚染がない正確に計量された量のガス又はガスの組み合わせを流量比制御装置106に供給でき、次いでプロセスチャンバ108a、108b、・・・、108iに予め選択された流量比で正確に分離/分割する。図示してないけれども、ガススティック114の各々には、ガスを監視し又は制御するための、フィルタ、ピュアリファイヤー、圧力トランスジューサー、制御装置、等のこの他の構成要素が設けられていてもよい。ガススティック114は、例えば、各ガススティックからのガス流を、ガスボックスから離れる前に混合できるように、出口マニホールド116に互いに連結されている。出口マニホールド116は、流量比制御装置106に連結されている。
【0017】
流量比制御装置106は、二つ又はそれ以上の流路即ちライン122a、122b、・・・122iを含む。各流路は、センサ124及びバルブ126を含む。センサ124は、各流路を通る質量流量を制御するように、バルブ126の制御で使用するための流量信号を発生する。センサ124及びバルブ126は、かくして、各流路の夫々の出力質量流量Q1、Q2、・・・Qi、・・・Qnを制御する上で互いに使用される。流量比を、以下の数1に定義する。
【0018】
【数1】
【0019】
ここで、ri は、ライン122iの流量比であり、Qi は、ライン122iを通る流量であり、QT は、以下の数2に示すように定義された全ての流れライン122の総流量である。
【0020】
【数2】
【0021】
数1及び数2によれば、すべての流量比の和は1に等しく、これは以下の数3に示すように表現できる。
【0022】
【数3】
【0023】
本明細書中に説明した実施例では、制御バルブ126a、126b、・・・126iは常開のバルブであるが、開示のシステムは、全てが常閉のバルブであるように設計されていてもよいし、これらの二種類のバルブの組み合わせを含んでいてもよいということは理解されるべきである。各流路の出口ライン130a、130b、・・・130iは、対応するプロセスツールに連結されている。これらのプロセスツールは、図1では、夫々、プロセッシングチャンバ108a、108b、・・・108iである。これらのチャンバの出口は、好ましくはゲートバルブ132a、132b、・・・132iの形態の制御バルブに連結されている。これらのゲートバルブは、ガスをタンクからチャンバを通して引き出すのに使用するため、一つ又はそれ以上の真空ポンプ134と流体連通している。別の態様では、出口ラインの夫々を単一のプロセスツールの同数の位置に連通していてもよいし、二つ又はそれ以上のプロセスツールの各々の一つ又はそれ以上の位置にしていてもよい。制御装置136は、とりわけ、各ライン122iの一つ毎に流量比設定点入力rspi を受け取る。流量比設定点入力rspi は、下文で更に明らかになるように、総流量QT に対するライン122iの流量の流量比の予め選択された値即ち設定点である。制御装置は、とりわけ、ライン122a、122b、・・・122nの各々を通る(総流量に対する)質量流量比を、夫々の設定点に制御し維持するように形成されている。
【0024】
図1のMCFRCシステムは、したがって、二次流れラインの各々に提供される流量比及び流量について迅速な整定時間を提供し、流量比設定点の所与の組について、MCFRCシステムを通る圧力降下を最小にするように分析され、モデル化される。流量及び流量比についての整定時間は、以下の数4に定義するMCFRCシステムの時定数τpと比例するということがわかる。
【0025】
【数4】
【0026】
ここで、Vu は、MCFRCシステムの上流容積である。CT は、以下の数4に定義するMCFRCシステムの総バルブコンダクタンスである。
【0027】
【数5】
【0028】
ここで、Ci(Ii)は、バルブ126iのバルブコンダクタンスであり、これは、バルブ電流Ii の関数である。一般的にはバルブコンダクタンスCi は、以下の数6によって決定できる。
【0029】
【数6】
【0030】
ここで、Pu は、MCFRCシステムの上流圧力である。更に、上流圧力Pu は以下の数7によって決定できるということがわかる。
【0031】
【数7】
【0032】
数4及び数7からわかるように、流量及び流量比に対して整定時間を短くするため、及び上流圧力を最小にするため、従って、MCFRCシステムを通る圧力降下を最小にするため、MCFRCシステムの総バルブコンダクタンスCT を最大にしなければならない。従って、制御アルゴリズムによって、任意の時期に、流量比設定点の所与の組に対して総バルブコンダクタンスを最大にできる場合には、流量比制御装置は、流量及び流量比に対する整定時間を最も速くし、流量比制御装置を通る圧力降下を最小にすること関して最適の制御性能を達成する。
【0033】
下文に示すように、常開のバルブを持つMCFRCシステムの流量比設定点の所与の組{ri} についての最大総バルブコンダクタンスに関し、一つの及び唯一の最適の解が存在する。この結果は、常閉のバルブを持つMCFRCシステムにも適用される。図2は、二次流れラインの各々に位置決めされ得る種類の典型的な常開のバルブについてのバルブ制御電流Iiに対する流量Qiのグラフである。バルブ電流の上下の計測値を含む例示の四組のバルブ曲線を、四つの上流圧力50トール、100トール、150トール、及び200トールでの代表的な常開のバルブについて示すが、下流圧力はほぼ0トールである。図示のように、常開のバルブについては、バルブコンダクタンスは、バルブ電流の増大に従って減少する。I=0で、即ちこの常開のバルブについてバルブが全開で最大バルブコンダクタンスが得られる。
【0034】
補助流量比(auxiliary flow ratios)即ちαiは、以下の数8に示すように定義される。
【0035】
【数8】
【0036】
ここで、αi は、流れチャンネルiと流れチャンネルlの間の流量比である(Ql≠0と仮定する)。流量比の所与の組{ri}は、対応する補助流量比の組{αi}を提供する。図3は、バルブ電流(Ii)に対してプロットした変更流量(Qi/αi)の全ての変更バルブ曲線を示す。図3に示すように、横線が全ての変更バルブ曲線と交差する場合には、交点は、数9−1を満たさなければならない。
【0037】
【数9−1】
【0038】
これは、まさに、補助流量比の所与の組{αi}、又は流量比の所与の組{ri}を満たす状態である。交点と対応するバルブ電流の組{Ii} は、MCFRCシステムについての、流量比の所与の組{ri} を得るための解を提供する。図示のように、これらの変更バルブ曲線と任意の横線との交点は、流量比の所与の組{ri} を満たすためのバルブ電流{Ii} の一組の解を提供する。換言すると、MCFRCシステムについて、流量比の所与の組を得る上で多数の解が存在する。これらの多数の解間の相違は、総バルブコンダクタンスCT である。図3に示すように、横線が高ければ高い程、総バルブコンダクタンスが高くなる。横線が全ての変更バルブ曲線と交点を持たなくなるまで横線の高さを上げることによって総バルブコンダクタンス解を高くする。
【0039】
図4は、MCFRCシステムについての、流量比の所与の組{ri} を得るための最大総バルブコンダクタンスに関する最適解を示す。最適解は、バルブjが全開位置にあるとき、即ちIj=0 のときに得られる。横線の高さをこれ以上上げると解が得られなくなる。これは、有効解が、横線と全ての変更バルブ曲線との交点であるためである。従って、図4に示すように、MCFRCシステムに関し、流量比の所与の組{ri} を得るための一つの及び唯一の最適解が存在する。最適解は、バルブjが全開位置にあるとき、即ちIj=0 のときに得られる。他方、MCFRCシステムの一つのバルブが全開位置にあり、即ちIj=0 であり、流量比の所与の組{ri} が得られた場合には、MCFRCシステムは、最大総バルブコンダクタンスの最適解の状態にある。
【0040】
下文において、図5に示すマルチ反対称最適(MAO)制御アルゴリズムは、任意の所与の時期で最適解がある、即ち常開のバルブを持つMCFRCシステムについてバルブが常に全開位置にある、即ちIi=0 であるように示してある。この結果は、常閉のバルブを持つMCFRCシステムにも適用される。
【0041】
好ましくは、MCFRCシステムは、全てのバルブ126がMCFRC制御装置136で同時に制御されるように形成されている。MCFRC制御装置136は、ホスト制御装置140から流量比設定点の組{rspi} を受け取り、計測された実際の流量比{rmi}及び他のMCFRC状態情報を報告し、ホスト制御装置140に戻す。MCFRC制御装置136で実行されるMAO制御アルゴリズムの詳細を図5に示す。流れセンサ124の出力{Qmi}を集め、加算することによって、計測した総流量QTmを接合部172のところに発生する。次いで、計測された流量比{rmi=Qmi/QTm}を計算し、流量比設定点の組{rspi} と比較し、エラー信号{ei=rspi−rmi}を発生する。次いで、エラー信号{ei} を同じ信号入力及び信号出力(SISO)制御装置164に供給し{Ki(s)} 、バルブ制御コマンド{Ici}を発生する。制御装置164は、PID制御装置、進み遅れ制御装置、モデルベースト制御装置等の任意の種類のSISO制御装置であってもよいが、SISO制御装置164は、最適の性能結果を得るため、同じ、即ち種類及び制御パラメータが同じである。バルブ126に加えられる最終的バルブ駆動電流{Ii}は、第1に接合部165のところで最適のバイアス電流Io によってバルブ制御コマンド{Ici}を差し引くことによって得られ、次いで、線型サチュレータ166によって下限Io及び上限Imで修正する。線型サチュレータ166は、各々、以下の数9に示すように定義される。
【数9】
【0042】
ここで、Ioは下飽和限度として使用され、Imは上飽和限度として使用される。
MAO制御アルゴリズムの線型サチュレータ166は、ソフトウェア又はハードウェアのいずれかで実施できる。多くのバルブ駆動回路は、下出力限度及び上出力限度を有する。最適バイアス電流Ioが、常開のバルブについての下出力限度又は常閉のバルブについての上出力限度として加えられた場合には、線型サチュレータ166をファームウェア又はソフトウェアで実施する必要はない。
【0043】
最適バイアス電流Ioは、最大バルブコンダクタンスを提供する許容可能な電流である。図2に示す常開のバルブについて、最適バイアス電流はゼロである。即ち、Io=0である。理解されるように、各流れチャンネルは、流れセンサ、SISO制御装置、及び流れバルブを含む同じフィードバック制御ループ構造を有する。
【0044】
図5に示すMAO制御アルゴリズムは、任意の時期に流量比設定点の所与の組{rspi}についての最適制御解を得ることができるように示すことができる。即ち、常に、常開のバルブを持つMCFRCシステムについて全開位置即ちIj=0 にあるバルブ126jがある。線型サチュレータ166の前の任意の流れチャンネルiのバルブ制御コマンドIci(i=1、2、・・・N)は、数10に示すように、全ての他のバルブ制御コマンドIcj(j=1、2、・・・N、j≠i)の和に対して反対称であるということがわかる。
【0045】
【数10】
【0046】
この特性をマルチ反対称(multiple antisymmetry)と呼ぶ。更に、線型サチュレータ166の後に少なくとも一つのバルブ駆動電流Ik が存在し、この電流が、数11に示すように、最適バイアス電流Io と等しいということがわかる。
【0047】
【数11】
【0048】
従って、図5に示す制御アルゴリズムを、本明細書中、「マルチ反対称最適」(又は「MAO」)制御と呼ぶ。MAO制御アルゴリズムは、MCFRCシステムについて、任意の時期に最適解が得られることを保証する。上文中に論じたように、最適解では、総バルブコンダクタンスが最大であり、整定時間及びMCFRCの前後の圧力降下の両方が最小である。
【0049】
MAO制御アルゴリズムは、いずれのバルブが全開位置にあるのかを明らかに表示しないが、全ての流れバルブのうちの少なくとも一つのバルブが全開位置にあることを保証する。これは、上文中に論じたように、上掲の数10のマルチ反対称特性のためである。図1に示すように、全ての流れバルブは、同じ入口122を共有するため、上流圧力条件が同じである。全ての流れバルブの下流圧力条件が同じである場合には、最高流量のバルブが全開位置になければならない。しかしながら、低流れチャンネルのうちの一つで重大な下流閉塞の問題点が生じた場合、MAO制御アルゴリズムは、当該下流閉塞流れチャンネルの流れバルブを駆動し、更に大きく開放する。これは、必要であれば、全開位置で停止する。流量比設定点を満たさない場合には、MAO制御アルゴリズムは、最高流れバルブを、その全開位置から比較的閉鎖された位置まで駆動する。これは、ターゲット流量比設定点に達するためである。このようにして、MAO制御アルゴリズムは、様々な流れチャンネル間の重大な下流閉塞の問題点を自動的に取り扱うことができる。
【0050】
MAO制御アルゴリズムは、2チャンネル流量比制御装置の特殊な場合にも適用される。このような構成は、2005年4月21日にジャニュア・ディン、ジョンA.スミス、及びカブー・ザルカー等の名で出願された、本譲受人に譲渡された(代理人事件番号56231−526、MKS−158)、現在継続中の米国特許出願第11/111,646号に記載されたDAO制御アルゴリズムと異なる。現在継続中の米国特許出願第11/111,646号に開示されたDAO制御アルゴリズムは、両二次チャンネルを制御するため、単一のSISO制御装置を使用するが、本発明のMAO制御アルゴリズムは、最適の性能を得るため、二つの二次チャンネルの各々に一つづつの二つの同じ制御装置を必要とする。MAO制御アルゴリズム又はDAO制御アルゴリズムのいずれについて、バルブ制御コマンドIc1及びIc2は、数14に示す反対称特性を有する。
【0051】
【数14】
【0052】
MAO制御アルゴリズムを2チャンネル流量比制御装置に適用した場合、二つのSISO制御装置が同じである。数14によって示唆されているように、MAO制御アルゴリズムに必要なSISO制御装置の一方を取り外し、負の制御出力コマンド−Ic を他方のバルブ制御ループに逸らすことができる。このようにして、現在継続中の米国特許出願第11/111,646号に記載された2チャンネル流量比制御装置については、MAO制御アルゴリズムはDAO制御アルゴリズムと同じになる。しかしながら、以下に説明するように、例えば最適以下の性能を許容できる場合には、二つの異なるSISO制御装置又は二つの異なる線型サチュレータを使用しようとする場合がある。
【0053】
かくして、MAO制御装置は、下記の事項を提供するように形成される。即ち、
(a)総流量に対する二次流れの流量比を所定の設定点流量比に維持するように、二次流れラインの質量流量の反対称最適制御を行い、
(b)少なくとも一つのバルブが最適バルブ電流Ioにあり、これにより作動の任意の一つの時点で最大許容可能バルブコンダクタンス点を提供し、この際、他方のバルブは、流量比の所定の設定値を維持するように能動的に制御され、
(c)一方の流れラインの流れが減少したため、二次流れの流量比が、予め選択された設定点からずれた場合、制御装置が、二次流れラインを通る二次流れを相対的に調節し、流量比を予め選択された設定点に戻すように、二次流れの流量比を所定の設定点に維持するように二次流れラインの質量流量を制御する。
【0054】
かくして、本開示に従って提供された新規であり且つ改良されたガス送出システム及び方法を説明した。本明細書中に説明した例示の実施例は、限定でなく例示として提供されたものであって、当業者は、添付の特許請求の範囲に記載された本開示の広い特徴から、その精神及び範囲のいずれからも逸脱することなく、様々な変形、変更、及び代替を行うことができる。例えば、本明細書中の大部分において、バルブを常開のバルブとして説明したが、常閉のバルブであってもよい。更に、上文中に説明したように最適制御性能について、制御装置164は同じSISOフィードバック制御装置である。即ち、これらの制御装置は、同じ種類であり、同じ制御パラメータを有する。更に、最適制御性能について同じ線型サチュレータを必要とする。しかしながら、多くの用途において、最適下限の、即ち実質的に最適の性能を受け入れることができ、そのため、SISOフィードバック制御装置、及び/又は線型サチュレータは同じでなく、及び/又は作動中にバルブのいずれも完全には開放しない(この場合、最大バルブコンダクタンスは提供されない)。本明細書中では、「実質的に最適」という用語は、最適性能に数%足りず、100%よりも低いけれども、所望の結果を得るのに十分に高いということを意味する。例えば、このような実質的に最適の性能は、幾つかの用途では、最適値の95%であってもよく、それでも満足のいく結果を提供する。二つの二次流れラインだけの流量比を制御する場合には、SISOフィードバック制御装置及び/又は線型サチュレータは同じである必要がなく、実質的に同じであるに過ぎず、様々な実施を提供する二つのフィードバック制御装置が必要とされる。これらの二つのフィードバック制御装置は、現在継続中の米国特許出願第11/111,646号に開示されたDAOと異なる態様で作動する。
【0055】
本明細書中に開示した本開示のガス送出システム及び方法、及びその全てのエレメントが、添付の特許請求の範囲のうちの少なくとも一つの範囲内に含まれる。本開示のシステム及び方法のエレメントのうち、特許請求の範囲から外されるものはなく、或いは特許請求の範囲の解釈を必然的に制限しようとするものはない。これらの特許請求の範囲において、単数のエレメントに対する言及は、特段の記載のない限り、「一つ及び唯一の」を意味しようとするものではなく、むしろ、「一つ又はそれ以上の」を意味する。本開示に亘って説明した様々な実施例のエレメントの構造的に及び機能的に等価の、当業者に現在周知の又は後に知られるようになる全てのものは、特に、本明細書の開示の一部とされ、特許請求の範囲に含まれる。更に、本明細書中に開示されたものは、こうした開示が特許請求の範囲に明快に記載されているかどうかに関わらず、公共に帰せられるものではない。特許請求の範囲に記載されたエレメントは、「ための手段」という言い方を使用して言及されない限り、又は方法についての特許請求の範囲の場合に「ための工程」という言い方を使用して言及されない限り、35U.S.C.§112第6項の下で解釈されるべきではない。
【符号の説明】
【0056】
102 多チャンネルガス送出システム
104 ガス供給部
106 流量比制御装置
108 プロセスチャンバ
112 ガスボックス
114 ガススティック
116 出口マニホールド
122 流路即ちライン
126 バルブ
130 出口ライン
132 ゲートバルブ
134 真空ポンプ
【特許請求の範囲】
【請求項1】
多チャンネルガス送出システムにおいて、
一次チャンネルと、
少なくとも二つの二次チャンネルと、
前記一次チャンネルを通してガスを受け取り、前記二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を制御するように、前記一次チャンネル及び前記複数の二次チャンネルに連結された流量比制御装置とを含む、システム。
【請求項2】
請求項1に記載のシステムにおいて、
前記流量比制御装置は、対応する二次チャンネルを通るガスの流量を制御するため、前記二次チャンネルの各々に流量計を含む、システム。
【請求項3】
請求項2に記載のシステムにおいて、
各流量計はセンサ及びバルブを含み、前記センサは、夫々の二次チャンネルを通る流量の流量比を制御するように、前記流量計の対応するバルブの制御で使用するための流量信号を提供する、システム。
【請求項4】
請求項3に記載のシステムにおいて、
前記バルブは常開のバルブである、システム。
【請求項5】
請求項3に記載のシステムにおいて、
前記バルブは常閉のバルブである、システム。
【請求項6】
請求項1に記載のシステムにおいて、
前記流量比制御装置は、流量比設定点入力を受け取るための入力を前記二次チャンネルの各々に一つずつ含む、システム。
【請求項7】
請求項1に記載のシステムにおいて、
前記二次チャンネルを通る流量及び流量比についての整定時間を最も速くし、前記流量比制御装置を通る圧力降下を最小にするように、前記システムの前記バルブの総バルブコンダクタンスを最大にする、システム。
【請求項8】
請求項7に記載のシステムにおいて、
前記バルブのうちの一つのバルブは常に完全に開放している、システム。
【請求項9】
請求項1に記載のシステムにおいて、
全てのバルブが同時に制御される、システム。
【請求項10】
請求項1に記載のシステムにおいて、
ホスト制御装置を更に含み、
前記ホスト制御装置及び前記流量比制御装置は、前記ホスト制御装置が、前記流量比制御装置に、前記二次チャンネルの各々について一つずつの一組の流量比設定点の組を提供し、前記流量比制御装置が、前記ホスト制御装置に、実際に計測した流量比を提供するように形成されている、システム。
【請求項11】
請求項10に記載のシステムにおいて、
前記流量比制御装置は、対応する前記二次チャンネルを通るガスの流量を制御するため、前記二次チャンネルの各々に設けられた流量計を含み、各センサの出力は、対応する二次チャンネルを通る実際の流量の計測値を提供し、全てのセンサの出力の和が総流量の計測値を提供する、システム。
【請求項12】
請求項11に記載のシステムにおいて、
二次チャンネルの各々を通る実際の流量の計測値の前記総流量の計測値に対する比が、対応する二次チャンネルを通る実際の流量比の計測値を提供し、前記流量比制御装置は、実際の流量比を流量比設定点の組と比較し、これと対応して前記二次チャンネルのバルブを制御し、実際の流量比を対応する流量比設定点の組と等しいように維持する、システム。
【請求項13】
多チャンネルガス送出システムにおいて、
一次チャンネルと、
少なくとも二つの二次チャンネルと、
前記一次チャンネルを通してガスを受け取り、前記二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を制御するように、前記一次チャンネル及び前記複数の二次チャンネルに連結された流量比制御装置とを含み、
前記流量比制御装置は、二次チャンネルの各々について、流れセンサ及びバルブを含み、前記バルブは、ターゲット流量比設定点を達成するため、単入力単出力(SISO)フィードバック制御装置によって積極的に制御される、多チャンネルガス送出システム。
【請求項14】
請求項13に記載の多チャンネルガス送出システムにおいて、
前記SISOフィードバック制御装置は、PID制御装置、進み遅れ制御装置、モデルベースト予測制御装置のうちの少なくとも一つを含む、多チャンネルガス送出システム。
【請求項15】
請求項13に記載の多チャンネルガス送出システムにおいて、
各二次チャンネルは、センサ、バルブ、及びフィードバック制御装置を含む二次チャンネル制御ループを含み、前記システムは、更に、各二次チャンネル制御ループの各々に線型サチュレータを含む、多チャンネルガス送出システム。
【請求項16】
請求項15に記載の多チャンネルガス送出システムにおいて、
全てのSISOフィードバック制御装置は実質的に同じであり、全ての線型サチュレータは実質的に同じである、多チャンネルガス送出システム。
【請求項17】
多チャンネルガス送出システムにおいて、
ガス入口チャンネル及び少なくとも二つの二次チャンネルと、
前記二次チャンネルの各々を通る流量を制御するように構成された、流れセンサ及びバルブを含む流量計と、
少なくとも二つの二次チャンネルの各々を通るガスの流量の、全ての前記二次チャンネルを通る全組み合わせ流量に対する流量比を制御するように形成されており且つ構成されたマルチ反対称最適(MAO)制御装置とを含み、
前記制御装置は、
(a)前記二次流量の前記総流量に対する流量比を維持するように、前記二次流れライン内の質量流量の実質的に最適の制御を提供し、
(b)前記二次流れラインの各々の質量流量を制御し、この制御は、一つの流れライン内の流量が減少し、前記二次流れの流量比が前記所定の設定点から外れた場合に、前記制御装置が、前記二次流れラインを通る相対的二次流れを調節し、前記流量比を所定の設定点に戻すように、前記二次流れの流量比を所定の設定点に維持するように形成されており、
前記バルブのうちの少なくとも一つのバルブは、作動の任意の一つの時期に、実質的に最大の許容可能なバルブコンダクタンス位置を提供し、この際、他のバルブは、対応する二次チャンネルの各々を通る流量比の所定の値を維持するように積極的に制御される、多チャンネルガス送出システム。
【請求項18】
多チャンネル流量比制御装置システムにおいて、
(a)前記制御装置システムを一次チャンネルに連結するように形成されており且つ構成された入力と、
(b)前記制御装置システムを対応する多くの二次チャンネルに連結するように形成されており且つ構成された複数の出力と、
(c)対応する複数の流れセンサ、制御バルブ、及びSISO制御装置とを含む流量比制御装置を含み、
(i)流れセンサ、(ii)制御バルブ、及び(iii)SISO制御装置は、各二次チャンネルを通る流れを制御するために設けられており、
前記流量比制御装置は、前記一次チャンネルを通してガスを受け取り、前記二次チャンネルの各々を通るガスの流量の全流量に対する流量比を制御し、流量比設定点の所与の組{rspi} についての実質的に最適の制御解を任意の時期に得るように形成されており且つ構成されており、前記実質的に最適の制御解は、
(i)前記二次チャンネルの各々を通る計測された流量比を決定し、
(ii)計測された総流量{QTm}を代表する値として前記流れセンサの前記出力{Qmi}の和を決定し、
(iii)前記二次チャンネルの各々を通る計測された流量比を、対応する流量比設定点と比較し、このような二次チャンネルの各々についてのエラー信号を発生し、
(iv)前記エラー信号の各々をSISOフィードバック制御装置に適用し、対応する制御バルブと関連したバルブ制御コマンドを発生し、対応する二次チャンネルを通る流量比設定点の所与の組を得る、多チャンネル流量比制御装置システム。
【請求項19】
請求項18に記載のシステムにおいて、更に、
各バルブと一つずつ関連した複数の線型サチュレータを含み、前記解は、更に、
前記バルブの各々について、最終バルブ駆動電流{Ii}を、対応するバルブ制御コマンドよりも小さい、各バルブと関連した最適バイアス電流の関数として発生し、
各最終駆動電流を、下限{Io}及び上限{Im}を持つ対応する線型サチュレータで修正し、各線型サチュレータは、以下の数9によって定義され、
【数9】
ここで、Ioは、下飽和限度として使用され、Imは、上飽和限度として使用される、システム。
【請求項20】
請求項19に記載のシステムにおいて、
前記線型サチュレータは、ソフトウェアで実施される、システム。
【請求項21】
請求項19に記載のシステムにおいて、
前記線型サチュレータは、ハードウェアで実施される、システム。
【請求項22】
請求項19に記載のシステムにおいて、
前記バルブ制御コマンドは、前記SISO制御装置から、前記バルブの各々の前記線型サチュレータが数10のマルチ反対称特性を持つ前に発生され、
【数10】
ここで、Nは二次流れチャンネルの総数である、システム。
【請求項23】
請求項19に記載の方法において、
少なくとも一つのバルブが、任意の時期に許容可能な最大開放位置にある、方法。
【請求項24】
一次チャンネルから複数の二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を、任意の時期に、流量比設定点の所与の組{rspi} についての実質的に最適の制御解に従って制御する方法において、
(i)前記二次チャンネルの各々を通る計測された流量比を決定する工程と、
(ii)計測された総流量(QTm)を、前記二次チャンネルの各々を通る計測された流量の関数として決定する工程と、
(iii)前記二次チャンネルの各々を通る計測された流量比を、対応する流量比設定点と比較し、このような二次チャンネルの各々のついてエラー信号を発生する工程と、
(iv)前記エラー信号の各々を対応するSISOフィードバック制御装置に適用し、前記二次チャンネルの夫々を通るガスの流量を制御するのに使用される対応する制御バルブと関連したバルブ制御コマンドを発生し、対応する二次チャンネルを通る流量比設定点の所与の組を得る工程とを含む、方法。
【請求項25】
請求項24に記載の方法において、更に、
前記制御バルブの各々について、最終バルブ駆動電流{Ii}を、対応するバルブ制御コマンドよりも小さい、各制御バルブと関連した最適バイアス電流の関数として発生し、
各最終駆動電流を、下限{Io}及び上限{Im}を持つ対応する線型サチュレータで修正し、各線型サチュレータは、以下の数9によって定義され、
【数9】
ここで、Ioは、下飽和限度として使用され、Imは、上飽和限度として使用される、方法。
【請求項26】
請求項25に記載の方法において、
各最適駆動電流の修正はソフトウェアで実行される、方法。
【請求項27】
請求項25に記載の方法において、
各最適駆動電流の修正はハードウェアで実行される、方法。
【請求項28】
請求項25に記載の方法において、
前記バルブ制御コマンドは、前記SISO制御装置から、各バルブの前記線型サチュレータが数10のマルチ反対称特性を持つ前に発生され、
【数10】
ここで、Nは二次流れチャンネルの総数である、方法。
【請求項29】
請求項25に記載の方法において、
少なくとも一つのバルブが、任意の時期に許容可能な最大開放位置にある、方法。
【請求項1】
多チャンネルガス送出システムにおいて、
一次チャンネルと、
少なくとも二つの二次チャンネルと、
前記一次チャンネルを通してガスを受け取り、前記二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を制御するように、前記一次チャンネル及び前記複数の二次チャンネルに連結された流量比制御装置とを含む、システム。
【請求項2】
請求項1に記載のシステムにおいて、
前記流量比制御装置は、対応する二次チャンネルを通るガスの流量を制御するため、前記二次チャンネルの各々に流量計を含む、システム。
【請求項3】
請求項2に記載のシステムにおいて、
各流量計はセンサ及びバルブを含み、前記センサは、夫々の二次チャンネルを通る流量の流量比を制御するように、前記流量計の対応するバルブの制御で使用するための流量信号を提供する、システム。
【請求項4】
請求項3に記載のシステムにおいて、
前記バルブは常開のバルブである、システム。
【請求項5】
請求項3に記載のシステムにおいて、
前記バルブは常閉のバルブである、システム。
【請求項6】
請求項1に記載のシステムにおいて、
前記流量比制御装置は、流量比設定点入力を受け取るための入力を前記二次チャンネルの各々に一つずつ含む、システム。
【請求項7】
請求項1に記載のシステムにおいて、
前記二次チャンネルを通る流量及び流量比についての整定時間を最も速くし、前記流量比制御装置を通る圧力降下を最小にするように、前記システムの前記バルブの総バルブコンダクタンスを最大にする、システム。
【請求項8】
請求項7に記載のシステムにおいて、
前記バルブのうちの一つのバルブは常に完全に開放している、システム。
【請求項9】
請求項1に記載のシステムにおいて、
全てのバルブが同時に制御される、システム。
【請求項10】
請求項1に記載のシステムにおいて、
ホスト制御装置を更に含み、
前記ホスト制御装置及び前記流量比制御装置は、前記ホスト制御装置が、前記流量比制御装置に、前記二次チャンネルの各々について一つずつの一組の流量比設定点の組を提供し、前記流量比制御装置が、前記ホスト制御装置に、実際に計測した流量比を提供するように形成されている、システム。
【請求項11】
請求項10に記載のシステムにおいて、
前記流量比制御装置は、対応する前記二次チャンネルを通るガスの流量を制御するため、前記二次チャンネルの各々に設けられた流量計を含み、各センサの出力は、対応する二次チャンネルを通る実際の流量の計測値を提供し、全てのセンサの出力の和が総流量の計測値を提供する、システム。
【請求項12】
請求項11に記載のシステムにおいて、
二次チャンネルの各々を通る実際の流量の計測値の前記総流量の計測値に対する比が、対応する二次チャンネルを通る実際の流量比の計測値を提供し、前記流量比制御装置は、実際の流量比を流量比設定点の組と比較し、これと対応して前記二次チャンネルのバルブを制御し、実際の流量比を対応する流量比設定点の組と等しいように維持する、システム。
【請求項13】
多チャンネルガス送出システムにおいて、
一次チャンネルと、
少なくとも二つの二次チャンネルと、
前記一次チャンネルを通してガスを受け取り、前記二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を制御するように、前記一次チャンネル及び前記複数の二次チャンネルに連結された流量比制御装置とを含み、
前記流量比制御装置は、二次チャンネルの各々について、流れセンサ及びバルブを含み、前記バルブは、ターゲット流量比設定点を達成するため、単入力単出力(SISO)フィードバック制御装置によって積極的に制御される、多チャンネルガス送出システム。
【請求項14】
請求項13に記載の多チャンネルガス送出システムにおいて、
前記SISOフィードバック制御装置は、PID制御装置、進み遅れ制御装置、モデルベースト予測制御装置のうちの少なくとも一つを含む、多チャンネルガス送出システム。
【請求項15】
請求項13に記載の多チャンネルガス送出システムにおいて、
各二次チャンネルは、センサ、バルブ、及びフィードバック制御装置を含む二次チャンネル制御ループを含み、前記システムは、更に、各二次チャンネル制御ループの各々に線型サチュレータを含む、多チャンネルガス送出システム。
【請求項16】
請求項15に記載の多チャンネルガス送出システムにおいて、
全てのSISOフィードバック制御装置は実質的に同じであり、全ての線型サチュレータは実質的に同じである、多チャンネルガス送出システム。
【請求項17】
多チャンネルガス送出システムにおいて、
ガス入口チャンネル及び少なくとも二つの二次チャンネルと、
前記二次チャンネルの各々を通る流量を制御するように構成された、流れセンサ及びバルブを含む流量計と、
少なくとも二つの二次チャンネルの各々を通るガスの流量の、全ての前記二次チャンネルを通る全組み合わせ流量に対する流量比を制御するように形成されており且つ構成されたマルチ反対称最適(MAO)制御装置とを含み、
前記制御装置は、
(a)前記二次流量の前記総流量に対する流量比を維持するように、前記二次流れライン内の質量流量の実質的に最適の制御を提供し、
(b)前記二次流れラインの各々の質量流量を制御し、この制御は、一つの流れライン内の流量が減少し、前記二次流れの流量比が前記所定の設定点から外れた場合に、前記制御装置が、前記二次流れラインを通る相対的二次流れを調節し、前記流量比を所定の設定点に戻すように、前記二次流れの流量比を所定の設定点に維持するように形成されており、
前記バルブのうちの少なくとも一つのバルブは、作動の任意の一つの時期に、実質的に最大の許容可能なバルブコンダクタンス位置を提供し、この際、他のバルブは、対応する二次チャンネルの各々を通る流量比の所定の値を維持するように積極的に制御される、多チャンネルガス送出システム。
【請求項18】
多チャンネル流量比制御装置システムにおいて、
(a)前記制御装置システムを一次チャンネルに連結するように形成されており且つ構成された入力と、
(b)前記制御装置システムを対応する多くの二次チャンネルに連結するように形成されており且つ構成された複数の出力と、
(c)対応する複数の流れセンサ、制御バルブ、及びSISO制御装置とを含む流量比制御装置を含み、
(i)流れセンサ、(ii)制御バルブ、及び(iii)SISO制御装置は、各二次チャンネルを通る流れを制御するために設けられており、
前記流量比制御装置は、前記一次チャンネルを通してガスを受け取り、前記二次チャンネルの各々を通るガスの流量の全流量に対する流量比を制御し、流量比設定点の所与の組{rspi} についての実質的に最適の制御解を任意の時期に得るように形成されており且つ構成されており、前記実質的に最適の制御解は、
(i)前記二次チャンネルの各々を通る計測された流量比を決定し、
(ii)計測された総流量{QTm}を代表する値として前記流れセンサの前記出力{Qmi}の和を決定し、
(iii)前記二次チャンネルの各々を通る計測された流量比を、対応する流量比設定点と比較し、このような二次チャンネルの各々についてのエラー信号を発生し、
(iv)前記エラー信号の各々をSISOフィードバック制御装置に適用し、対応する制御バルブと関連したバルブ制御コマンドを発生し、対応する二次チャンネルを通る流量比設定点の所与の組を得る、多チャンネル流量比制御装置システム。
【請求項19】
請求項18に記載のシステムにおいて、更に、
各バルブと一つずつ関連した複数の線型サチュレータを含み、前記解は、更に、
前記バルブの各々について、最終バルブ駆動電流{Ii}を、対応するバルブ制御コマンドよりも小さい、各バルブと関連した最適バイアス電流の関数として発生し、
各最終駆動電流を、下限{Io}及び上限{Im}を持つ対応する線型サチュレータで修正し、各線型サチュレータは、以下の数9によって定義され、
【数9】
ここで、Ioは、下飽和限度として使用され、Imは、上飽和限度として使用される、システム。
【請求項20】
請求項19に記載のシステムにおいて、
前記線型サチュレータは、ソフトウェアで実施される、システム。
【請求項21】
請求項19に記載のシステムにおいて、
前記線型サチュレータは、ハードウェアで実施される、システム。
【請求項22】
請求項19に記載のシステムにおいて、
前記バルブ制御コマンドは、前記SISO制御装置から、前記バルブの各々の前記線型サチュレータが数10のマルチ反対称特性を持つ前に発生され、
【数10】
ここで、Nは二次流れチャンネルの総数である、システム。
【請求項23】
請求項19に記載の方法において、
少なくとも一つのバルブが、任意の時期に許容可能な最大開放位置にある、方法。
【請求項24】
一次チャンネルから複数の二次チャンネルの各々を通るガスの流量の、全流量に対する流量比を、任意の時期に、流量比設定点の所与の組{rspi} についての実質的に最適の制御解に従って制御する方法において、
(i)前記二次チャンネルの各々を通る計測された流量比を決定する工程と、
(ii)計測された総流量(QTm)を、前記二次チャンネルの各々を通る計測された流量の関数として決定する工程と、
(iii)前記二次チャンネルの各々を通る計測された流量比を、対応する流量比設定点と比較し、このような二次チャンネルの各々のついてエラー信号を発生する工程と、
(iv)前記エラー信号の各々を対応するSISOフィードバック制御装置に適用し、前記二次チャンネルの夫々を通るガスの流量を制御するのに使用される対応する制御バルブと関連したバルブ制御コマンドを発生し、対応する二次チャンネルを通る流量比設定点の所与の組を得る工程とを含む、方法。
【請求項25】
請求項24に記載の方法において、更に、
前記制御バルブの各々について、最終バルブ駆動電流{Ii}を、対応するバルブ制御コマンドよりも小さい、各制御バルブと関連した最適バイアス電流の関数として発生し、
各最終駆動電流を、下限{Io}及び上限{Im}を持つ対応する線型サチュレータで修正し、各線型サチュレータは、以下の数9によって定義され、
【数9】
ここで、Ioは、下飽和限度として使用され、Imは、上飽和限度として使用される、方法。
【請求項26】
請求項25に記載の方法において、
各最適駆動電流の修正はソフトウェアで実行される、方法。
【請求項27】
請求項25に記載の方法において、
各最適駆動電流の修正はハードウェアで実行される、方法。
【請求項28】
請求項25に記載の方法において、
前記バルブ制御コマンドは、前記SISO制御装置から、各バルブの前記線型サチュレータが数10のマルチ反対称特性を持つ前に発生され、
【数10】
ここで、Nは二次流れチャンネルの総数である、方法。
【請求項29】
請求項25に記載の方法において、
少なくとも一つのバルブが、任意の時期に許容可能な最大開放位置にある、方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−84287(P2013−84287A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−269002(P2012−269002)
【出願日】平成24年12月10日(2012.12.10)
【分割の表示】特願2009−550950(P2009−550950)の分割
【原出願日】平成20年1月11日(2008.1.11)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−269002(P2012−269002)
【出願日】平成24年12月10日(2012.12.10)
【分割の表示】特願2009−550950(P2009−550950)の分割
【原出願日】平成20年1月11日(2008.1.11)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]