
マンコンベア用手摺除菌装置
【課題】オゾンを用いて移動手摺の除菌を行うことができるマンコンベア用手摺除菌装置を得る。
【解決手段】マンコンベアのステップ1と同期して移動する移動手摺4を除菌するためのマンコンベア用手摺除菌装置であって、移動手摺4の除菌を行うための処理室を有する処理装置10と、処理室内にオゾンを供給するオゾン発生器11と、高電圧電極22および高電圧電源25により構成され、供給されたオゾンを分解するためのプラズマを発生するプラズマ発生器12とを備える。
【解決手段】マンコンベアのステップ1と同期して移動する移動手摺4を除菌するためのマンコンベア用手摺除菌装置であって、移動手摺4の除菌を行うための処理室を有する処理装置10と、処理室内にオゾンを供給するオゾン発生器11と、高電圧電極22および高電圧電源25により構成され、供給されたオゾンを分解するためのプラズマを発生するプラズマ発生器12とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えばエスカレータや動く歩道といったマンコンベアの移動手摺を除菌するマンコンベア用手摺除菌装置に関する。
【背景技術】
【0002】
エスカレータや動く歩道といったマンコンベアでは、乗客が乗るステップと同期するように移動手摺が駆動されている。この移動手摺は、ステップに乗降する乗客やステップ上にいる乗客が掴むために設けられたものである。
【0003】
本来、乗客は、マンコンベアを利用している間、常に移動手摺を掴んでいることが望ましい。しかしながら、マンコンベアは、不特定多数の人によって使用されるものなので、乗客の中には、移動手摺に触れることを不快に感じる人もいる。そのため、マンコンベアを利用する際に移動手摺を一切掴まない乗客や、ステップに乗降するときだけ移動手摺を掴み、ステップ上に移動すると移動手摺を放してしまう乗客も散見される。
【0004】
そこで、このような事情に鑑み、移動手摺の除菌を行うエスカレータハンドレール用安全装置が提案されている(例えば、特許文献1参照)。具体的には、この安全装置は、移動手摺に対して紫外線を照射したり、殺菌液を噴霧、塗布したりすることによって、移動手摺の除菌を行っている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4231505号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載された発明では、移動手摺に対して紫外線を照射したり、殺菌液を噴霧、塗布したりして、移動手摺を除菌している。しかしながら、上記特許文献1のものを含め、従来のものは、除菌性能が高く、かつ近年手軽に使用できるようになったオゾンを用いて移動手摺を除菌することが行われていない。また、紫外線照射ランプの劣化や殺菌液の減少により、継続的に安定して使用することが困難であるという問題もある。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、オゾンを用いて移動手摺の除菌を行うことができるマンコンベア用手摺除菌装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るマンコンベア用手摺除菌装置は、マンコンベアのステップと同期して移動する移動手摺を除菌するためのマンコンベア用手摺除菌装置であって、移動手摺の除菌を行うための処理室を有する処理装置と、処理室内にオゾンを供給するオゾン発生器と、高電圧電極および高電圧電源により構成され、供給されたオゾンを分解するためのプラズマを発生するプラズマ発生器と、を備えたものである。
【発明の効果】
【0009】
この発明に係るマンコンベア用手摺除菌装置によれば、オゾン発生器は、移動手摺の除菌を行うための処理室内にオゾンを供給し、プラズマ発生器は、供給されたオゾンを分解するためのプラズマを発生する。
そのため、オゾンを用いて移動手摺の除菌を行うことができるマンコンベア用手摺除菌装置を得ることができる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1に係るマンコンベアを示す要部側面図である。
【図2】この発明の実施の形態1に係るマンコンベアの構成を示すブロック図である。
【図3】この発明の実施の形態1に係るマンコンベア用手摺除菌装置を示す構成図である。
【図4】この発明の実施の形態1に係るマンコンベアの動作を示すフローチャートである。
【図5】この発明の実施の形態1に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図6】この発明の実施の形態1に係るマンコンベア用手摺除菌装置の除菌効果を示す説明図である。
【図7】この発明の実施の形態2に係るマンコンベア用手摺除菌装置を示す構成図である。
【図8】この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図9】この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図10】この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図11】この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図12】この発明の実施の形態3に係るマンコンベア用手摺除菌装置を示す構成図である。
【図13】図12に示すマンコンベア用手摺除菌装置の底面を示す底面図である。
【発明を実施するための形態】
【0011】
この発明を詳細に説明するために、添付の図面に従ってこれを説明する。なお、各図中、同一または相当する部分には同一の符号を付しており、その重複説明は、適宜に簡略化ないし省略する。
また、以下においては、マンコンベアの一例として、上下階床間の移動の際に利用されるエスカレータについて具体的な構成を説明し、動く歩道等の他の例については、その説明を省略する。
【0012】
実施の形態1.
図1は、この発明の実施の形態1に係るマンコンベアを示す要部側面図である。図2は、この発明の実施の形態1に係るマンコンベアの構成を示すブロック図である。図3は、この発明の実施の形態1に係るマンコンベア用手摺除菌装置を示す構成図である。
【0013】
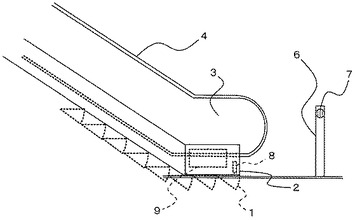
図1は、エスカレータの下部昇降口を示している。図1および図2において、マンコンベアは、乗客が上下階床間を移動する際に乗るステップ1、ステップ1の両側に設けられたデッキボード2、デッキボード2に支持されたガラスパネル等の内側板3、およびステップ1に乗降する乗客やステップ1上にいる乗客が掴むための移動手摺4を有している。
【0014】
移動手摺4は、一般に、断面C字状を呈し、無端状に形成されている。移動手摺4は、ステップ1と同期するように駆動されており、その上側部分と乗降口における反転部分とが、内側板3の縁部に沿って移動する。なお、移動手摺4の下側部分は、デッキボード2やトラス(図示せず)内を移動する。
【0015】
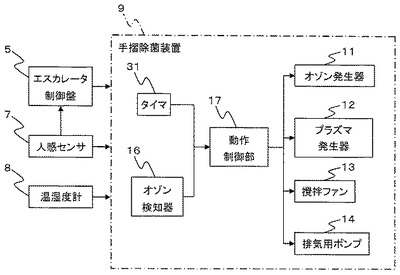
また、マンコンベアは、エスカレータの制御盤5、乗降口に立設されたポール6、ポール6に設けられた人感センサ7、デッキボード2内に設けられた温湿度計8、および同じくデッキボード2内に設けられた手摺除菌装置9を有している。
【0016】
制御盤5は、ステップ1や移動手摺4の走行制御等、エスカレータの運行全体を制御する。制御盤5は、エスカレータ起動時の起動信号や、ステップ1(移動手摺4)の速度信号等を、必要に応じて手摺除菌装置9に出力する。人感センサ7は、エスカレータの乗客の存在を検出すると、その検出信号を必要に応じて制御盤5や手摺除菌装置9に出力する。
【0017】
温湿度計8は、エスカレータ周囲の温度および湿度を測定する機能を有している。なお、温湿度計8の設置場所は、特に限定されるものではなく、例えば、手摺除菌装置9の近傍、制御盤5の近傍、またはポール6等に設置しても構わない。温湿度計8は、温度および湿度の検出信号を、必要に応じて手摺除菌装置9に出力する。
【0018】
手摺除菌装置9は、除菌性能が高く、かつ近年手軽に使用できるようになったオゾンを用いて移動手摺4の除菌を行う機能を備えている。手摺除菌装置9は、例えば、乗降口近傍のデッキボード2(または、トラス)内に配置される。なお、手摺除菌装置9設置側の乗降口がエスカレータの乗り口であれば、乗客が使用する直前の移動手摺4を除菌することができる。また、手摺除菌装置9設置側の乗降口がエスカレータの降り口であれば、乗客が使用した直後の移動手摺4を除菌することができる。
【0019】
以下、図3も参照しながら、手摺除菌装置9の構成について具体的に説明する。
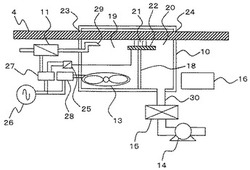
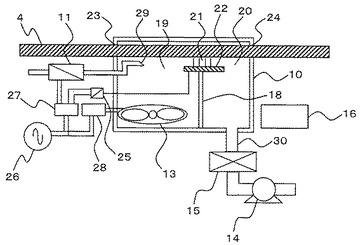
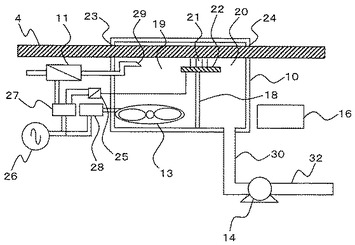
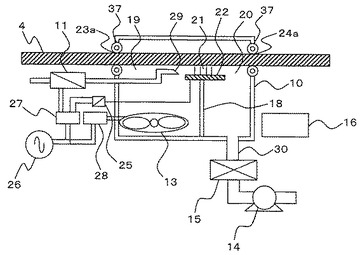
手摺除菌装置9は、処理装置10、オゾン発生器11、プラズマ発生器12、攪拌ファン13、排気用ポンプ14、オゾン分解触媒15、オゾン検知器16、動作制御部17により、その要部が構成される。
【0020】
処理装置10は、例えば、所定の密閉度を有する箱状を呈しており、その内部に、オゾンおよびプラズマ(電子)によって移動手摺4の除菌を行うための処理室が形成されている。即ち、手摺除菌装置9では、この処理室内をオゾンで充満させ、その中に移動手摺4を通し、プラズマ発生器12で発生したプラズマ(電子)によりオゾンを分解してできた殺菌力の高い活性力を持つ粒子によって除菌を行う。
【0021】
具体的には、この発明の実施の形態1に係る処理装置10には、仕切り板18によって2つの処理室19、20が形成されており、処理室19、20が、処理装置10の上側部分において、幅狭の連結部21で連結されている。なお、処理室19、20は、連結部21でのみ連結されており、他の部分では繋がっていない。この連結部21にプラズマ発生用の高電圧電極22が配置される。
【0022】
また、処理装置10には、移動手摺4を処理室に通すための貫通孔23、24が形成されている。貫通孔23は、処理装置10の一側上部に形成されており、処理室19に開口する。貫通孔24は、処理装置10の他側上部に形成されており、処理室20に開口する。貫通孔23、24は、上記連結部21と一直線状の空間を形成しており、移動手摺4は、処理装置10内において、貫通孔23、処理室19、連結部21、処理室20、貫通孔24を順次貫通するように配置される。
【0023】
オゾン発生器11は、オゾンを発生させ、その発生させたオゾンを処理装置10の処理室内に供給する機能を有している。プラズマ発生器12は、高電圧電極22および高電圧電源25で構成され、処理装置10内に供給されたオゾンをプラズマ(電子)により分解する機能を有している。
【0024】
この発明の実施の形態1に係るオゾン発生器11は、発生させたオゾンを一方の処理室19内に供給する。なお、手摺除菌装置9は、さらに電源26、電源26から電力の供給が行われるオゾン発生器11およびプラズマ発生器12用の制御器27、および電源26から電力の供給が行われる攪拌ファン13用の制御器28を有している。オゾン発生器11およびプラズマ発生器12の制御は、この制御器27を介して動作制御部17により行われる。
【0025】
攪拌ファン13は、オゾン発生器11から供給されたオゾンを処理室内で攪拌するためのものである。攪拌ファン13は、例えば、処理室19内に設けられており、オゾン発生器11からオゾン供給口29を通して処理室19内に供給されたオゾンを移動手摺4側に送ることができるように、オゾン供給口29に対して移動手摺4の反対側に配置される。攪拌ファン13の制御は、制御器28を介して動作制御部17により行われる。
【0026】
排気用ポンプ14は、処理装置10の処理室内の空気を外部に排出するためのものである。排気用ポンプ14は、例えば、処理室20に接続された配管30から処理室20内の空気を吸引し、その吸引した空気を処理装置10の外部に排出する。なお、排気用ポンプ14が駆動されることによって処理室20内の空気が外部に排出されるので、排気用ポンプ14が駆動している間、処理室19、20内は常に陰圧に保たれる。
【0027】
なお、図3に示す構成の手摺除菌装置9では、外部の空気が貫通孔23、24から処理室内に進入すると、その空気の大部分はオゾン発生器11においてオゾン化されることなく、処理室20から配管30を通過して外部に排出されてしまう。即ち、貫通孔23、24から処理室内に空気が進入すると、処理室内のオゾン濃度が低下し、手摺除菌装置9の殺菌効果が低下してしまう。
【0028】
このような事態を防止するために、例えば、オゾン供給口29を高電圧電極22の極近傍に取り付け、排気用ポンプ14の吸引圧力に応じて、オゾン供給口29から処理室内に進入するオゾン量が調整可能となるような構成であれば、貫通孔23、24からの空気の流入を防ぐことができ、処理室内のオゾン濃度を高い状態に保つことが可能となる。
【0029】
オゾン分解触媒15は、オゾン発生器11で発生したオゾンがそのまま処理室の外に排出されてしまうことを防止するためのものである。例えば、オゾン分解触媒15は、処理室20と排気用ポンプ14とを接続する配管30の途中に設けられ、配管30を通過する空気中のオゾンを分解する。即ち、排気用ポンプ14によって処理室20から配管30内に吸引された空気は、このオゾン分解触媒15を通過する際に、その中に含まれるオゾンが分解され、その後、排気用ポンプ14を通過して外部に排出される。なお、図3に示すように、オゾン分解触媒15を排気用ポンプ14の前段に配置しておくことにより、排気用ポンプ14をオゾンから保護することも可能となる。
【0030】
オゾン検知器16は、所定の基準値以上のオゾンを検知する機能を有している。オゾン検知器16は、処理装置10の処理室内から漏れ出したオゾンを検知するために設けられたものであり、処理室の外部に設置される。なお、オゾン検知器16は、オゾンの有無を複数のレベルで検知できる機能を備えたものや、オゾンの濃度自体を検知できる機能を備えたもの(いわゆる、オゾン濃度計)であってもよい。オゾン検知器16は、例えば、所定の基準値以上のオゾン(即ち、処理室からのオゾン漏れ)を検知すると、動作制御部17に対してその検知信号を出力する。
【0031】
動作制御部17は、手摺除菌装置9に備えられている各構成の動作を制御する機能を有している。手摺除菌装置9には、所定のタイマ31も備えられており、動作制御部17は、外部機器(例えば、制御盤5や人感センサ7等)からの入力信号や、タイマ31、オゾン検知器16からの入力信号等に基づいて、オゾン発生器11、攪拌ファン13、排気用ポンプ14等の各動作を適切に制御する。
【0032】
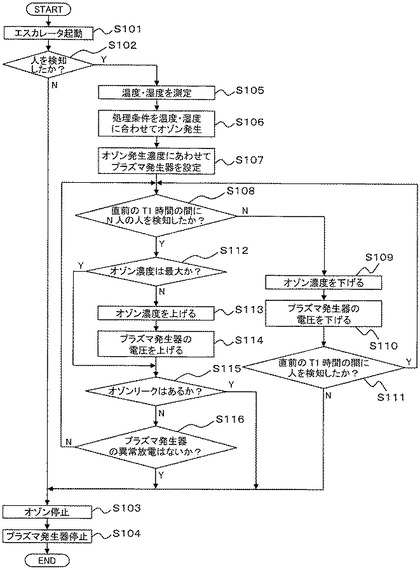
次に、図4も参照しながら、上記構成を有するエスカレータ(特に、手摺除菌装置9)の動作について、具体的に説明する。図4は、この発明の実施の形態1に係るマンコンベアの動作を示すフローチャートである。
【0033】
まず、エスカレータが起動されると(ステップS101)、制御盤5によってステップ1および移動手摺4が駆動される。エスカレータの起動時、手摺除菌装置9では、オゾンの発生は停止されており、制御盤5から起動信号が入力されても、人感センサ7によって乗客が検出されるまでは、処理室内へのオゾンの供給は行われず、プラズマ発生器12も停止したままである(ステップS102においてNo、ステップS103、ステップS104)。
【0034】
続いて、エスカレータの起動後、人感センサ7によって乗客が検出されると(ステップS102においてYes)、人感センサ7から手摺除菌装置9に対して検出信号が入力される。手摺除菌装置9は、人感センサ7から検出信号を受信することにより、温湿度計8から現在の温度および湿度の各情報を取り込む(ステップS105)。
【0035】
次に、手摺除菌装置9は、ステップS105で取得した温度および湿度の各情報に基づいて、除菌条件を設定し、オゾンを発生させる(ステップS106)。その後、手摺除菌装置9は、発生したオゾン量に合わせて、プラズマ発生器12の条件を設定する(ステップS107)。
【0036】
具体的には、動作制御部17は、オゾン発生器11、プラズマ発生器12、攪拌ファン13および排気用ポンプ14を駆動するとともに、ステップS105で測定された温度および湿度に基づいて、オゾン発生器11から処理室19内に供給されるオゾンの量を調節する。
【0037】
このとき、処理室内にオゾン濃度計を別途備えておくことにより、そのオゾン濃度計による測定濃度をフイードバックさせて、処理室内のオゾン濃度を一定に保持するような制御を行ってもよい。その後、供給されたオゾン量に合わせて、高電圧電極22に繋がる高電圧電源25の出力を調整して、プラズマ発生器12の出力を調整する。
【0038】
なお、オゾン発生器11から処理室19内に供給されたオゾンは、攪拌ファン13によって処理室19内で移動手摺4に吹き付けられた後、排気用ポンプ14が動作することによって生じた気流に乗り、連結部21に設けられた高電圧電極22、処理室20、配管30を順次通って、オゾン分解触媒15に達する。
【0039】
また、オゾンは、高電圧電極22およびオゾン分解触媒15で分解され、酸素に戻った状態で処理装置10の外部に排出される。なお、オゾン発生器11からオゾンが供給されている間は、排気用ポンプ14が動作しているので、処理室19、20内は、常に陰圧に保たれており、オゾンが貫通孔23、24から外部に排出されることはない。
【0040】
続いて、ステップS106においてオゾンの供給を開始し、ステップS107においてプラズマ発生器12の始動を開始すると、動作制御部17は、タイマ31による計測時間と人感センサ7からの検出信号とに基づいて、直前の時間T1の間に、N人の乗客が検知されたか否かを判定する(ステップS108)。なお、時間T1、および、乗客の人数Nの各値は、記憶手段(図示せず)に予め記憶されている。
【0041】
ここで、直前の時間T1の間に検知された乗客がN人よりも少ない場合(即ち、エスカレータ乗客が少ない場合)、動作制御部17は、処理室19、20内のオゾン濃度を、ステップS106で設定した値から、所定値まで下げるように各機器を制御する(ステップS108においてNo、ステップS109)。その後、動作制御部17は、オゾン濃度に合わせて、プラズマ発生器12の出力を下げるよう調節する(ステップS110)。
【0042】
動作制御部17は、ステップS109において処理室19、20内のオゾン濃度を低下させ、ステップS110でプラズマ発生器12の出力を低下させると、次に、直前の時間T1の間に人感センサ7によって乗客が検知されたか否かを判定する(ステップS111)。
【0043】
ここで、直前の時間T1の間に人感センサ7から検出信号を受信していれば、ステップS108に進み(ステップS111においてYes)、人感センサ7から検出信号を受信していなければ、ステップS103に進む。即ち、上記制御によれば、人感センサ7によって最後の乗客が検出されてから上記時間T1が経過すると、動作制御部17は、オゾン発生器11からのオゾンの供給を停止させ(ステップS111においてNo、ステップS103)、プラズマ発生器12を停止する(ステップS104)。
【0044】
一方、直前の時間T1の間に感知された乗客がN人以上の場合(ステップS108においてYes)、動作制御部17は、現在のオゾン濃度が最大に設定されているか否かを判定する(ステップS112)。このとき、オゾン濃度が最大に設定されていなければ、動作制御部17は、処理室19、20内のオゾン発生量が一段階上がるように各機器を制御し(ステップS112においてNo、ステップS113)、それに合わせてプラズマ発生器12の出力を上げる(ステップS114)。
【0045】
その後、動作制御部17は、オゾン検知器16からの検知信号に基づいて、オゾン漏れの有無を判定し(ステップS115)、オゾン漏れが発生していなければ、プラズマ発生器12に異常放電がないか否かを判定する(ステップS115においてNo、ステップS116)。なお、オゾン濃度が最大に設定されていれば、ステップS115に進む(ステップS112においてYes)。
【0046】
ここで、オゾン漏れが発生しているか、プラズマ発生器12に異常放電が発生していれば、ステップS103に進んで上記処理を行う(ステップS115においてYes、ステップS116においてYes)。なお、プラズマ発生器12に異常が発生していなければ、ステップS108に進む(ステップS116においてNo)。
【0047】
この発明の実施の形態1によれば、除菌性能が高く、かつ近年手軽に使用できるように
なったオゾンを用いて移動手摺4の除菌を行うことができる。また、プラズマ発生器12で発生したプラズマ(電子)によりオゾンを分解することで、次式(1)により発生するより強い殺菌力を持つ酸素原子、さらに水分が共存する場合には、次式(2)により発生するヒドロキシラジカル等の活性種を利用して除菌を行うことができる。
【0048】
O3+e→O+O2+e (1)
O+H2O→2OH (2)
ここで、eは電子を示す。
【0049】
即ち、上記構成の手摺除菌装置9であれば、オゾン発生器11から供給されたオゾンが、処理室19から連結部21、処理室20に送られる際に、そのオゾンから強い殺菌力をもつ酸素原子やヒドロキシラジカル等の活性種を発生させ、移動手摺4の表面(外側面、C字状の内側面)付近で、手摺表面全体に満遍なく酸素原子、ヒドロキシラジカル等の活性種、および分解しきれなかったオゾンを当てることができ、優れた除菌効果を発揮できる。
【0050】
また、上記構成の手摺除菌装置9であれば、オゾン発生器11から処理室内に供給されたオゾンがそのまま外部に排出されたり、オゾンが貫通孔23、24を通って外部に排出されたりする恐れもない。さらに、万一オゾン漏れが発生しても、その発生をオゾン検知器16によって直ちに検知することができ、オゾンの供給停止等、適切な動作を迅速に行うことができる。
【0051】
また、上記構成の手摺除菌装置9では、直前の所定時間内に人感センサ7によって検出された乗客数に基づいて、オゾン発生器11から処理室内に供給されるオゾンの量を調節している。このため、乗客が多い場合は、オゾン濃度およびプラズマ発生器12の出力を上げて除菌効率を高めたり、また、乗客が少ない場合は、無駄なオゾンの発生を防止したりする等、状況に応じた適切な運転を実現することが可能となる。
【0052】
なお、この発明の実施の形態1では、処理室20から配管30に取り込んだ空気を、オゾン分解触媒15を通過させてから外部に排出する場合について説明した。しかしながら、オゾンおよび酸素原子、ヒドロキシラジカル等の活性種には脱臭効果があるので、手摺除菌装置9において除菌のために使用したオゾン等を、エスカレータの他の部分で脱臭用として再利用してもよい。
【0053】
図5は、この発明の実施の形態1に係るマンコンベア用手摺除菌装置の他の構成を示す構成図であり、手摺除菌装置9の排気ガスを脱臭用として両利用する場合の構成を示したものである。
【0054】
図5に示す手摺除菌装置9は、図3に示すものからオゾン分解触媒15を取り除いたものに相当する。即ち、図5に示す手摺除菌装置9では、排気用ポンプ14が動作することによって処理室20から配管30内に吸引された空気は、その中に含まれるオゾンが分解されることなく、配管30を通過する。なお、排気用ポンプ14の先には、さらに配管32が接続されており、処理室20から吸引されたオゾンを含む空気は、この配管32を通って、エスカレータの主枠内(例えば、機械室内)に、または特定部位に向けてそのまま放出される。
【0055】
エスカレータでは、硫黄を含むオイルが使用されている場合がある。このような場合、例えば、排気用ポンプ14からオイルの使用部位まで配管32を延ばすことにより、オゾンを含む空気を配管32によってオイル使用部位まで導き、その使用部位に向けてオゾン(を含む空気)を放出する。これにより、硫黄特有の臭いをオゾンによって消すことができ、乗客の不快感を和らげることが可能となる。
【0056】
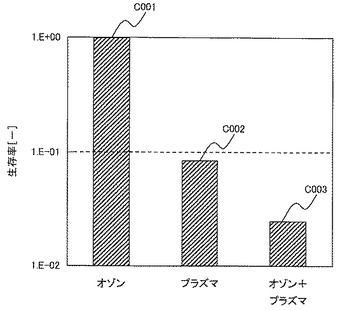
次に、図6を参照しながら、この発明の実施の形態1により得られた効果について説明する。図6は、この発明の実施の形態1に係るマンコンベア用手摺除菌装置の除菌効果を示す説明図である。
【0057】
図6は、オゾン単独で処理濃度10ppm、被処理対象物への曝露時間30分で処理した場合の微生物の生存率(C001)、オゾンなしでプラズマ発生器12の印加電圧2.3kVで処理した場合の微生物の生存率(C002)、オゾン濃度10ppm、プラズマ発生器12の印加電圧2.3kVで処理した場合の微生物の生存率(C003)を示している。なお、処理対象の微生物として、エスカレータの使用条件を加味し、乾燥した環境でも死滅しにくい表皮ブドウ球菌を用いた。
【0058】
図6より、オゾンだけでは死滅しない微生物に対しても、プラズマ発生器12のみの30分間の処理で、生存率が60%(除菌率40%)まで低下し、オゾンとプラズマ発生器12の併用で、生存率が2.5%(除菌率97.5%)まで低下する。このように、この発明の実施の形態1により、極めて高い除菌性能が得られることがわかった。
【0059】
実施の形態2.
この発明の実施の形態2においては、図7〜11を参照し、手摺除菌装置9の他の構成例について具体的な説明を行う。図7は、この発明の実施の形態2に係るマンコンベア用手摺除菌装置を示す構成図である。図8〜11は、この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【0060】
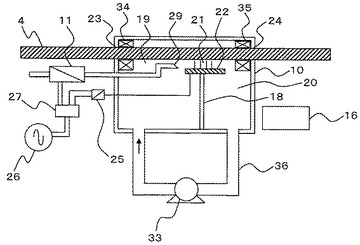
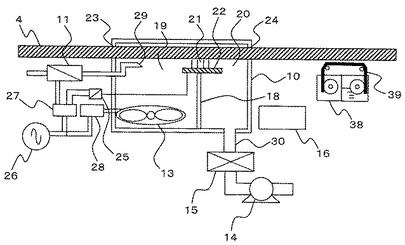
図7に示す手摺除菌装置9は、処理装置10、オゾン発生器11、高電圧電極22、循環用ポンプ33、オゾン分解触媒34、35、オゾン検知器16、動作制御部17により、その要部が構成される。
【0061】
図7において、処理装置10は、2つの処理室19、20が、連結部21の反対側で配管36によって連結されている。処理装置10の他の部分、およびオゾン発生器11、高電圧電極22、オゾン検知器16については、実施の形態1と同様の構成および機能を有するので、詳細な説明は省略する。
【0062】
循環用ポンプ33は、処理室内の空気を循環させるためのものである。循環用ポンプ33は、例えば、処理室19、20間を接続する配管36に設けられ、処理室20内の空気を、連結部21を介さずに処理室19へと送ることができるように構成されている。即ち、循環用ポンプ33が動作することにより、処理装置10内の空気は、処理室19、連結部21、処理室20、配管36を順次通って、再び処理室19に戻るように循環する。なお、循環用ポンプ33は、処理装置10内の空気を循環させる循環手段の一例として示したものである。上記機能を備えることができれば、循環手段として、例えばファン等の他の手段を採用しても構わない。
【0063】
オゾン分解触媒34、35は、処理室の内部において移動手摺4の周囲を取り巻くように、貫通孔23、24の各近傍に設置されている。オゾン分解触媒34、35の機能および設置目的は、上記オゾン分解触媒15と同様である。図7に示す手摺除菌装置9では、排気用ポンプ14が備えられていないので、オゾン供給中に処理室内を陰圧に保持しておくことができない。このため、処理室内の空気は、貫通孔23、24を通って処理装置10の外部に排出される。オゾン分解触媒34は、処理室19内の空気が貫通孔23を介して外部に排出される際に、その空気中に含まれるオゾンを分解する機能を有している。また、オゾン分解触媒35は、処理室20内の空気が貫通孔24を介して外部に排出される際に、その空気中に含まれるオゾンを分解する機能を有している。
【0064】
動作制御部17は、外部機器(例えば、制御盤5や人感センサ7等)からの入力信号や、タイマ31、オゾン検知器16からの入力信号等に基づいて、オゾン発生器11、高電圧電源25、循環用ポンプ33等の各動作を適切に制御し、例えば、図4に示す処理フローを実施する。
【0065】
この構成によれば、循環用ポンプ33によって処理室内の空気を適切に循環させることができ、オゾン発生器11から供給されたオゾンが、処理室19から連結部21、処理室20に送られる際に、そのオゾンから、高電圧電極22での分解により強い殺菌力をもつ酸素原子やヒドロキシラジカル等の活性種を発生させ、移動手摺4の表面(外側面・C字状の内側面)付近で、手摺方面全体に満遍なく酸素原子、ヒドロキシラジカル等の活性種、および分解しきれなかったオゾンを当てることができる。そのため、図3に示した手摺除菌装置9と同様に、優れた除菌効果を発揮できる。
【0066】
図8に示す手摺除菌装置9には、図3に示す各構成に加え、処理装置10にローラ37が設けられている。なお、ローラ37以外の構成については、図5または図7に示す構成が採用されていても構わない。
【0067】
実施の形態1では、処理装置10に2つの貫通孔23、24を形成し、この貫通孔23、24に移動手摺4を通して、移動手摺4の一部を処理室内に配置する場合について説明した。しかしながら、貫通孔23、24は、処理装置10の壁面に形成した単なる孔なので、排気用ポンプ14を駆動すると、移動手摺4と処理装置10との隙間(即ち、貫通孔23、24)から処理室内に空気が進入してしまう。なお、貫通孔23、24から処理室内に空気が進入すると、上述したように、処理室内のオゾン濃度が低下し、殺菌効率の低下を招いてしまう。
【0068】
そこで、図8に示す手摺除菌装置9では、処理室への出入口にローラ37を設置し、このローラ37によって、移動手摺4を処理室に通すための貫通孔23a、24aを形成している。具体的に、ローラ37は、移動手摺4を上下から挟み込むように配置され、外周面を移動手摺4に密着させたまま、移動手摺4の移動に連動して回転するように構成されている。ローラ37は、移動手摺4と密着する材質であって、移動手摺4の材質に、影響を与えない材質、例えば、ゴム等で構成される。
【0069】
ローラ37によって貫通孔23a、24aの全体を形成することができれば、移動手摺4と処理装置10との隙間を完全に閉塞して、当該部分からの空気の進入を完全に防止することができる。しかしながら、貫通孔23a、24aの全体を形成することができなくても、ローラ37によって少なくともその一部を形成することができれば、当該部分からの空気の進入を大幅に低減することができ、処理室内を高いオゾン濃度に維持することが可能となる。
【0070】
なお、貫通孔23a、24aは、移動手摺4がローラ37間に進入することによって初めて形成されるものであってもよいし、移動手摺4が存在しない状態で、処理室内に開口するものであってもよい。なお、ローラ37について記述を行ったが、空気の侵入を大幅に低減できる方法であればよく、例えば、カーテン状のシートを貫通孔23、24近傍に備えることで同様の効果を得ることができる。
【0071】
図9上に示す手摺除菌装置9には、塗布・拭取装置38が設けられている。なお、塗布・拭取装置38以外の構成については、図3、5、7、8に示す何れの構成が採用されていても構わない。
【0072】
塗布・拭取装置38は、処理装置10の処理室内または処理室の手前で、移動手摺4に水または洗剤を塗布し、拭き取る機能を有している。なお、図9では、処理装置10の外部に塗布・拭取装置38を設置し、処理室の手前で水を塗布し、拭き取るものを一例として示している。塗布・拭取装置38は、例えば、水を染み込ませた布39を移動手摺4の移動に合わせて繰り出すことにより、この布39を、処理室に進入する直前の移動手摺4の表面に接触させて水を塗布し、汚れの拭き取りを行う。
【0073】
図9に示す手摺除菌装置9では、水が塗布された移動手摺4を処理室内に進入させることにより、移動手摺4の表面上の水分と処理室内のオゾン、プラズマ発生器12により発生した酸素原子とを反応させてヒドロキシラジカルを生成し、移動手摺4の除菌を行う。この構成によっても、より除菌効果の優れた手摺除菌装置9を提供することができる。
【0074】
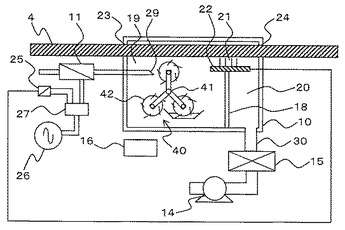
図10に示す手摺除菌装置9は、処理装置10、オゾン発生器11、高電圧電極22、排気用ポンプ14、オゾン分解触媒15、オゾン検知器16、ブラシ装置40、動作制御部17により、その要部が構成される。
【0075】
この手摺除菌装置9では、処理室19内にオゾン供給口29、高電圧電極22および後述のブラシ装置40が設けられている。なお、処理装置10の他の部分、およびオゾン発生器11、プラズマ発生器12、排気用ポンプ14、オゾン分解触媒15、オゾン検知器16、動作制御部17については、実施の形態1と同様の構成および機能を有するので、詳細な説明は省略する。
【0076】
ブラシ装置40は、処理室19内で移動手摺4の表面に付着したゴミを取り除くためのものである。ブラシ装置40は、例えば、ロータ軸41に連結された三連のブラシ42を備えており、ブラシ42を移動手摺4の表面に接触させて付着したゴミを掻き落とす。また、ブラシ装置40では、定期的にロータ軸41を回転させて一部のブラシ42を休ませ、その休ませたブラシ42を洗浄液に浸して処理室19内でブラシ42の洗浄を行う。
【0077】
なお、図10に示すブラシ装置40には、三連のブラシ42が備えられているが、これは単に一例を示したものである。ブラシ装置40は、少なくとも2つのブラシを備え、それらがゴミの掻き落としと洗浄とを周期的に移動する構成を有していればよい。
【0078】
この構成によれば、オゾンによって移動手摺4の表面全体を除菌しながら、移動手摺4の表面に付着しているゴミをブラシ装置40によって取り除くことができる。なお、ブラシ装置40によって処理室19内に掻き落とされたゴミにも菌が含まれているが、この菌についても、オゾン発生器11から処理室19内に供給されたオゾンによって除菌することができる。また、ブラシ42が処理室19内で定期的に洗浄されるので、ブラシ42自体を清潔に保つこともできる。
【0079】
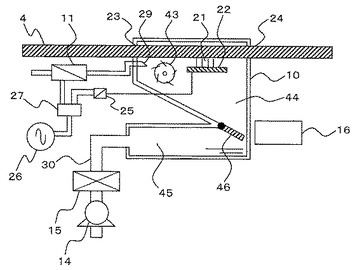
図11に示す手摺除菌装置9は、処理装置10、オゾン発生器11、高電圧電極22、排気用ポンプ14、オゾン分解触媒15、オゾン検知器16、ブラシ装置43、動作制御部17により、その要部が構成される。
【0080】
この手摺除菌装置9では、処理装置10に2つの処理室44、45が形成されており、処理室44、45は、弁46を介して上下に連結されている。上側の処理室44は、移動手摺4が通過するための空間を形成する。即ち、貫通孔23、24は、処理室44に開口しており、移動手摺4は、処理装置10内において、貫通孔23、処理室44、貫通孔24を順次貫通するように配置される。処理室44は、弁46を介して下側の処理室45に連結されており、弁46の設置位置が最下となるように、例えば、その底面が斜めに形成されている。
【0081】
また、処理室44には、その内部にブラシ装置43が設けられている。ブラシ装置43は、処理室44内において移動手摺4の表面に付着したゴミを取り除くためのものである。ブラシ装置43によって移動手摺4の表面から掻き落とされたゴミは、処理室44の底面を滑って弁46に達し、さらに弁46を通過して下側の処理室45内に落下する。下側の処理室45は、酸素原子やヒドロキシラジカル等の活性種、およびオゾンによって、上記ゴミに含まれる菌を除菌するための空間を形成する。
【0082】
即ち、オゾン供給口29から供給されたオゾンは、高電圧電極22を通して、オゾン、酸素原子、ヒドロキシラジカル等に変換されて処理室45内に供給される。また、排気用ポンプ14に接続された配管30は、処理室45に開口するように処理装置10に接続されている。このため、排気用ポンプ14が駆動している間は、処理室45が陰圧に保たれており、オゾン供給口29から処理室44内に供給されたオゾンは、弁46を通って処理室45に進入し、配管30を通ってオゾン分解触媒15で分解される。
【0083】
この構成によれば、移動手摺4の表面に付着しているゴミをブラシ装置43によって取り除き、そのゴミに含まれる菌を殺菌力の高い活性粒子によって除菌することができる。なお、手摺除菌装置9としてこの発明の実施の形態2に係る各構成を採用しても、除菌性能が高く、かつ近年手軽に使用できるようになったオゾンを用いて移動手摺4の除菌を行うことができる。また、この発明の実施の形態2において説明しなかった事項については、実施の形態1と同様である。
【0084】
実施の形態3.
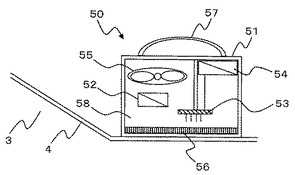
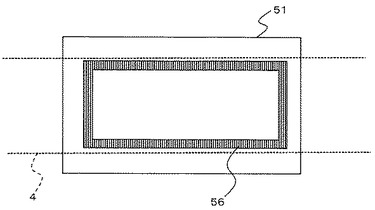
図12は、この発明の実施の形態3に係るマンコンベア用手摺除菌装置を示す構成図である。図13は、図12に示すマンコンベア用手摺除菌装置の底面を示す底面図である。
【0085】
図12、13に示す手摺除菌装置50は、上記手摺除菌装置9と同様に、除菌性能が高く、かつ近年手軽に使用できるようになったオゾンを用いて移動手摺4を除菌する機能を備えている。この可搬型の手摺除菌装置50は、例えば、処理装置51、オゾン発生器52、高電圧電極53、高電圧電源54、攪拌ファン55、シール材56、動作制御部(図示せず)により、その要部が構成されている。
【0086】
処理装置51は、例えば、上部に把手57が設けられ、その内部に、下方に開口する処理室58が形成されている。上記開口は、移動手摺4の幅よりも僅かに狭い幅の長方形状を呈しており、この開口を形成する処理装置51の縁部全体にシール材56が設けられている。
【0087】
オゾン発生器52、高電圧電極53、高電圧電源54および攪拌ファン55は、上記オゾン発生器11、高電圧電極22、高電圧電源25および攪拌ファン13と同様の機能を有している。即ち、オゾン発生器52は、処理室58内にオゾンを供給する機能を有し、攪拌ファン55は、オゾン発生器52から処理室58内に供給されたオゾンを処理室58内で攪拌させる機能を有し、高電圧電源54は、高電圧電極53に電圧を供給し、高電圧電極53は、オゾン発生器52で発生したオゾンを分解する機能を有している。オゾン発生器52、高電圧電源54および攪拌ファン55の動作は、例えば、ON/OFF釦等の入力信号に基づいて、動作制御部によって制御される。
【0088】
上記構成の手摺除菌装置50を使用する場合、エスカレータの保守員は、把手57を持って処理装置51(装置全体)を持ち上げ、処理装置51の下面に形成された上記開口が移動手摺4によって塞がれるように、処理装置51を移動手摺4に載せる。そして、保守員は、その状態で処理装置51を移動手摺4に押し付けることにより、シール材56を移動手摺4の上面に密着させて、処理室58を所定の密閉状態で外気から遮断する。即ち、この状態で処理室58内をオゾンで充満させることにより、高電圧電極53でオゾンが分解した酸素原子やヒドロキシラジカル、窒素酸化物等の活性種またはオゾン等で、上記開口を介して処理室58に面する移動手摺4の表面を除菌することができる。
【0089】
なお、移動手摺4はステップ1と同期して移動するので、例えば、処理装置51の上記縁部にローラを回軌自在に固定し、このローラの表面にシール材56を設けてもよい。かかる構成であれば、ローラの表面に設けられたシール材56が移動手摺4に押し付けられると、移動手摺4の移動に連動してローラが回転し、処理室58の密閉状態を確保したまま除菌処理を行うことができる。
【符号の説明】
【0090】
1 ステップ、2 デッキボード、3 内側板、4 移動手摺、5 制御盤、6 ポール、7 人感センサ、8 温湿度計、9、50 手摺除菌装置、10、51 処理装置、11、52 オゾン発生器、12 プラズマ発生器、13、55 攪拌ファン、14 排気用ポンプ、15、34、35 オゾン分解触媒、16 オゾン検知器、17 動作制御部、18 仕切り板、19 処理室(第1処理室)、20 処理室(第2処理室)、21 連結部、22、53 高電圧電極、23、23a 貫通孔(第1貫通孔)、24、24a 貫通孔(第2貫通孔)、25、54 高電圧電源、26 電源、27、28 制御器、29 オゾン供給口、30、32、36 配管、31 タイマ、33 循環用ポンプ、37 ローラ、38 塗布・拭取装置、39 布、40、43 ブラシ装置、41 ロータ軸、42 ブラシ、44、45、58 処理室、46 弁、56 シール材、57 把手。
【技術分野】
【0001】
この発明は、例えばエスカレータや動く歩道といったマンコンベアの移動手摺を除菌するマンコンベア用手摺除菌装置に関する。
【背景技術】
【0002】
エスカレータや動く歩道といったマンコンベアでは、乗客が乗るステップと同期するように移動手摺が駆動されている。この移動手摺は、ステップに乗降する乗客やステップ上にいる乗客が掴むために設けられたものである。
【0003】
本来、乗客は、マンコンベアを利用している間、常に移動手摺を掴んでいることが望ましい。しかしながら、マンコンベアは、不特定多数の人によって使用されるものなので、乗客の中には、移動手摺に触れることを不快に感じる人もいる。そのため、マンコンベアを利用する際に移動手摺を一切掴まない乗客や、ステップに乗降するときだけ移動手摺を掴み、ステップ上に移動すると移動手摺を放してしまう乗客も散見される。
【0004】
そこで、このような事情に鑑み、移動手摺の除菌を行うエスカレータハンドレール用安全装置が提案されている(例えば、特許文献1参照)。具体的には、この安全装置は、移動手摺に対して紫外線を照射したり、殺菌液を噴霧、塗布したりすることによって、移動手摺の除菌を行っている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4231505号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載された発明では、移動手摺に対して紫外線を照射したり、殺菌液を噴霧、塗布したりして、移動手摺を除菌している。しかしながら、上記特許文献1のものを含め、従来のものは、除菌性能が高く、かつ近年手軽に使用できるようになったオゾンを用いて移動手摺を除菌することが行われていない。また、紫外線照射ランプの劣化や殺菌液の減少により、継続的に安定して使用することが困難であるという問題もある。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、オゾンを用いて移動手摺の除菌を行うことができるマンコンベア用手摺除菌装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るマンコンベア用手摺除菌装置は、マンコンベアのステップと同期して移動する移動手摺を除菌するためのマンコンベア用手摺除菌装置であって、移動手摺の除菌を行うための処理室を有する処理装置と、処理室内にオゾンを供給するオゾン発生器と、高電圧電極および高電圧電源により構成され、供給されたオゾンを分解するためのプラズマを発生するプラズマ発生器と、を備えたものである。
【発明の効果】
【0009】
この発明に係るマンコンベア用手摺除菌装置によれば、オゾン発生器は、移動手摺の除菌を行うための処理室内にオゾンを供給し、プラズマ発生器は、供給されたオゾンを分解するためのプラズマを発生する。
そのため、オゾンを用いて移動手摺の除菌を行うことができるマンコンベア用手摺除菌装置を得ることができる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1に係るマンコンベアを示す要部側面図である。
【図2】この発明の実施の形態1に係るマンコンベアの構成を示すブロック図である。
【図3】この発明の実施の形態1に係るマンコンベア用手摺除菌装置を示す構成図である。
【図4】この発明の実施の形態1に係るマンコンベアの動作を示すフローチャートである。
【図5】この発明の実施の形態1に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図6】この発明の実施の形態1に係るマンコンベア用手摺除菌装置の除菌効果を示す説明図である。
【図7】この発明の実施の形態2に係るマンコンベア用手摺除菌装置を示す構成図である。
【図8】この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図9】この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図10】この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図11】この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【図12】この発明の実施の形態3に係るマンコンベア用手摺除菌装置を示す構成図である。
【図13】図12に示すマンコンベア用手摺除菌装置の底面を示す底面図である。
【発明を実施するための形態】
【0011】
この発明を詳細に説明するために、添付の図面に従ってこれを説明する。なお、各図中、同一または相当する部分には同一の符号を付しており、その重複説明は、適宜に簡略化ないし省略する。
また、以下においては、マンコンベアの一例として、上下階床間の移動の際に利用されるエスカレータについて具体的な構成を説明し、動く歩道等の他の例については、その説明を省略する。
【0012】
実施の形態1.
図1は、この発明の実施の形態1に係るマンコンベアを示す要部側面図である。図2は、この発明の実施の形態1に係るマンコンベアの構成を示すブロック図である。図3は、この発明の実施の形態1に係るマンコンベア用手摺除菌装置を示す構成図である。
【0013】
図1は、エスカレータの下部昇降口を示している。図1および図2において、マンコンベアは、乗客が上下階床間を移動する際に乗るステップ1、ステップ1の両側に設けられたデッキボード2、デッキボード2に支持されたガラスパネル等の内側板3、およびステップ1に乗降する乗客やステップ1上にいる乗客が掴むための移動手摺4を有している。
【0014】
移動手摺4は、一般に、断面C字状を呈し、無端状に形成されている。移動手摺4は、ステップ1と同期するように駆動されており、その上側部分と乗降口における反転部分とが、内側板3の縁部に沿って移動する。なお、移動手摺4の下側部分は、デッキボード2やトラス(図示せず)内を移動する。
【0015】
また、マンコンベアは、エスカレータの制御盤5、乗降口に立設されたポール6、ポール6に設けられた人感センサ7、デッキボード2内に設けられた温湿度計8、および同じくデッキボード2内に設けられた手摺除菌装置9を有している。
【0016】
制御盤5は、ステップ1や移動手摺4の走行制御等、エスカレータの運行全体を制御する。制御盤5は、エスカレータ起動時の起動信号や、ステップ1(移動手摺4)の速度信号等を、必要に応じて手摺除菌装置9に出力する。人感センサ7は、エスカレータの乗客の存在を検出すると、その検出信号を必要に応じて制御盤5や手摺除菌装置9に出力する。
【0017】
温湿度計8は、エスカレータ周囲の温度および湿度を測定する機能を有している。なお、温湿度計8の設置場所は、特に限定されるものではなく、例えば、手摺除菌装置9の近傍、制御盤5の近傍、またはポール6等に設置しても構わない。温湿度計8は、温度および湿度の検出信号を、必要に応じて手摺除菌装置9に出力する。
【0018】
手摺除菌装置9は、除菌性能が高く、かつ近年手軽に使用できるようになったオゾンを用いて移動手摺4の除菌を行う機能を備えている。手摺除菌装置9は、例えば、乗降口近傍のデッキボード2(または、トラス)内に配置される。なお、手摺除菌装置9設置側の乗降口がエスカレータの乗り口であれば、乗客が使用する直前の移動手摺4を除菌することができる。また、手摺除菌装置9設置側の乗降口がエスカレータの降り口であれば、乗客が使用した直後の移動手摺4を除菌することができる。
【0019】
以下、図3も参照しながら、手摺除菌装置9の構成について具体的に説明する。
手摺除菌装置9は、処理装置10、オゾン発生器11、プラズマ発生器12、攪拌ファン13、排気用ポンプ14、オゾン分解触媒15、オゾン検知器16、動作制御部17により、その要部が構成される。
【0020】
処理装置10は、例えば、所定の密閉度を有する箱状を呈しており、その内部に、オゾンおよびプラズマ(電子)によって移動手摺4の除菌を行うための処理室が形成されている。即ち、手摺除菌装置9では、この処理室内をオゾンで充満させ、その中に移動手摺4を通し、プラズマ発生器12で発生したプラズマ(電子)によりオゾンを分解してできた殺菌力の高い活性力を持つ粒子によって除菌を行う。
【0021】
具体的には、この発明の実施の形態1に係る処理装置10には、仕切り板18によって2つの処理室19、20が形成されており、処理室19、20が、処理装置10の上側部分において、幅狭の連結部21で連結されている。なお、処理室19、20は、連結部21でのみ連結されており、他の部分では繋がっていない。この連結部21にプラズマ発生用の高電圧電極22が配置される。
【0022】
また、処理装置10には、移動手摺4を処理室に通すための貫通孔23、24が形成されている。貫通孔23は、処理装置10の一側上部に形成されており、処理室19に開口する。貫通孔24は、処理装置10の他側上部に形成されており、処理室20に開口する。貫通孔23、24は、上記連結部21と一直線状の空間を形成しており、移動手摺4は、処理装置10内において、貫通孔23、処理室19、連結部21、処理室20、貫通孔24を順次貫通するように配置される。
【0023】
オゾン発生器11は、オゾンを発生させ、その発生させたオゾンを処理装置10の処理室内に供給する機能を有している。プラズマ発生器12は、高電圧電極22および高電圧電源25で構成され、処理装置10内に供給されたオゾンをプラズマ(電子)により分解する機能を有している。
【0024】
この発明の実施の形態1に係るオゾン発生器11は、発生させたオゾンを一方の処理室19内に供給する。なお、手摺除菌装置9は、さらに電源26、電源26から電力の供給が行われるオゾン発生器11およびプラズマ発生器12用の制御器27、および電源26から電力の供給が行われる攪拌ファン13用の制御器28を有している。オゾン発生器11およびプラズマ発生器12の制御は、この制御器27を介して動作制御部17により行われる。
【0025】
攪拌ファン13は、オゾン発生器11から供給されたオゾンを処理室内で攪拌するためのものである。攪拌ファン13は、例えば、処理室19内に設けられており、オゾン発生器11からオゾン供給口29を通して処理室19内に供給されたオゾンを移動手摺4側に送ることができるように、オゾン供給口29に対して移動手摺4の反対側に配置される。攪拌ファン13の制御は、制御器28を介して動作制御部17により行われる。
【0026】
排気用ポンプ14は、処理装置10の処理室内の空気を外部に排出するためのものである。排気用ポンプ14は、例えば、処理室20に接続された配管30から処理室20内の空気を吸引し、その吸引した空気を処理装置10の外部に排出する。なお、排気用ポンプ14が駆動されることによって処理室20内の空気が外部に排出されるので、排気用ポンプ14が駆動している間、処理室19、20内は常に陰圧に保たれる。
【0027】
なお、図3に示す構成の手摺除菌装置9では、外部の空気が貫通孔23、24から処理室内に進入すると、その空気の大部分はオゾン発生器11においてオゾン化されることなく、処理室20から配管30を通過して外部に排出されてしまう。即ち、貫通孔23、24から処理室内に空気が進入すると、処理室内のオゾン濃度が低下し、手摺除菌装置9の殺菌効果が低下してしまう。
【0028】
このような事態を防止するために、例えば、オゾン供給口29を高電圧電極22の極近傍に取り付け、排気用ポンプ14の吸引圧力に応じて、オゾン供給口29から処理室内に進入するオゾン量が調整可能となるような構成であれば、貫通孔23、24からの空気の流入を防ぐことができ、処理室内のオゾン濃度を高い状態に保つことが可能となる。
【0029】
オゾン分解触媒15は、オゾン発生器11で発生したオゾンがそのまま処理室の外に排出されてしまうことを防止するためのものである。例えば、オゾン分解触媒15は、処理室20と排気用ポンプ14とを接続する配管30の途中に設けられ、配管30を通過する空気中のオゾンを分解する。即ち、排気用ポンプ14によって処理室20から配管30内に吸引された空気は、このオゾン分解触媒15を通過する際に、その中に含まれるオゾンが分解され、その後、排気用ポンプ14を通過して外部に排出される。なお、図3に示すように、オゾン分解触媒15を排気用ポンプ14の前段に配置しておくことにより、排気用ポンプ14をオゾンから保護することも可能となる。
【0030】
オゾン検知器16は、所定の基準値以上のオゾンを検知する機能を有している。オゾン検知器16は、処理装置10の処理室内から漏れ出したオゾンを検知するために設けられたものであり、処理室の外部に設置される。なお、オゾン検知器16は、オゾンの有無を複数のレベルで検知できる機能を備えたものや、オゾンの濃度自体を検知できる機能を備えたもの(いわゆる、オゾン濃度計)であってもよい。オゾン検知器16は、例えば、所定の基準値以上のオゾン(即ち、処理室からのオゾン漏れ)を検知すると、動作制御部17に対してその検知信号を出力する。
【0031】
動作制御部17は、手摺除菌装置9に備えられている各構成の動作を制御する機能を有している。手摺除菌装置9には、所定のタイマ31も備えられており、動作制御部17は、外部機器(例えば、制御盤5や人感センサ7等)からの入力信号や、タイマ31、オゾン検知器16からの入力信号等に基づいて、オゾン発生器11、攪拌ファン13、排気用ポンプ14等の各動作を適切に制御する。
【0032】
次に、図4も参照しながら、上記構成を有するエスカレータ(特に、手摺除菌装置9)の動作について、具体的に説明する。図4は、この発明の実施の形態1に係るマンコンベアの動作を示すフローチャートである。
【0033】
まず、エスカレータが起動されると(ステップS101)、制御盤5によってステップ1および移動手摺4が駆動される。エスカレータの起動時、手摺除菌装置9では、オゾンの発生は停止されており、制御盤5から起動信号が入力されても、人感センサ7によって乗客が検出されるまでは、処理室内へのオゾンの供給は行われず、プラズマ発生器12も停止したままである(ステップS102においてNo、ステップS103、ステップS104)。
【0034】
続いて、エスカレータの起動後、人感センサ7によって乗客が検出されると(ステップS102においてYes)、人感センサ7から手摺除菌装置9に対して検出信号が入力される。手摺除菌装置9は、人感センサ7から検出信号を受信することにより、温湿度計8から現在の温度および湿度の各情報を取り込む(ステップS105)。
【0035】
次に、手摺除菌装置9は、ステップS105で取得した温度および湿度の各情報に基づいて、除菌条件を設定し、オゾンを発生させる(ステップS106)。その後、手摺除菌装置9は、発生したオゾン量に合わせて、プラズマ発生器12の条件を設定する(ステップS107)。
【0036】
具体的には、動作制御部17は、オゾン発生器11、プラズマ発生器12、攪拌ファン13および排気用ポンプ14を駆動するとともに、ステップS105で測定された温度および湿度に基づいて、オゾン発生器11から処理室19内に供給されるオゾンの量を調節する。
【0037】
このとき、処理室内にオゾン濃度計を別途備えておくことにより、そのオゾン濃度計による測定濃度をフイードバックさせて、処理室内のオゾン濃度を一定に保持するような制御を行ってもよい。その後、供給されたオゾン量に合わせて、高電圧電極22に繋がる高電圧電源25の出力を調整して、プラズマ発生器12の出力を調整する。
【0038】
なお、オゾン発生器11から処理室19内に供給されたオゾンは、攪拌ファン13によって処理室19内で移動手摺4に吹き付けられた後、排気用ポンプ14が動作することによって生じた気流に乗り、連結部21に設けられた高電圧電極22、処理室20、配管30を順次通って、オゾン分解触媒15に達する。
【0039】
また、オゾンは、高電圧電極22およびオゾン分解触媒15で分解され、酸素に戻った状態で処理装置10の外部に排出される。なお、オゾン発生器11からオゾンが供給されている間は、排気用ポンプ14が動作しているので、処理室19、20内は、常に陰圧に保たれており、オゾンが貫通孔23、24から外部に排出されることはない。
【0040】
続いて、ステップS106においてオゾンの供給を開始し、ステップS107においてプラズマ発生器12の始動を開始すると、動作制御部17は、タイマ31による計測時間と人感センサ7からの検出信号とに基づいて、直前の時間T1の間に、N人の乗客が検知されたか否かを判定する(ステップS108)。なお、時間T1、および、乗客の人数Nの各値は、記憶手段(図示せず)に予め記憶されている。
【0041】
ここで、直前の時間T1の間に検知された乗客がN人よりも少ない場合(即ち、エスカレータ乗客が少ない場合)、動作制御部17は、処理室19、20内のオゾン濃度を、ステップS106で設定した値から、所定値まで下げるように各機器を制御する(ステップS108においてNo、ステップS109)。その後、動作制御部17は、オゾン濃度に合わせて、プラズマ発生器12の出力を下げるよう調節する(ステップS110)。
【0042】
動作制御部17は、ステップS109において処理室19、20内のオゾン濃度を低下させ、ステップS110でプラズマ発生器12の出力を低下させると、次に、直前の時間T1の間に人感センサ7によって乗客が検知されたか否かを判定する(ステップS111)。
【0043】
ここで、直前の時間T1の間に人感センサ7から検出信号を受信していれば、ステップS108に進み(ステップS111においてYes)、人感センサ7から検出信号を受信していなければ、ステップS103に進む。即ち、上記制御によれば、人感センサ7によって最後の乗客が検出されてから上記時間T1が経過すると、動作制御部17は、オゾン発生器11からのオゾンの供給を停止させ(ステップS111においてNo、ステップS103)、プラズマ発生器12を停止する(ステップS104)。
【0044】
一方、直前の時間T1の間に感知された乗客がN人以上の場合(ステップS108においてYes)、動作制御部17は、現在のオゾン濃度が最大に設定されているか否かを判定する(ステップS112)。このとき、オゾン濃度が最大に設定されていなければ、動作制御部17は、処理室19、20内のオゾン発生量が一段階上がるように各機器を制御し(ステップS112においてNo、ステップS113)、それに合わせてプラズマ発生器12の出力を上げる(ステップS114)。
【0045】
その後、動作制御部17は、オゾン検知器16からの検知信号に基づいて、オゾン漏れの有無を判定し(ステップS115)、オゾン漏れが発生していなければ、プラズマ発生器12に異常放電がないか否かを判定する(ステップS115においてNo、ステップS116)。なお、オゾン濃度が最大に設定されていれば、ステップS115に進む(ステップS112においてYes)。
【0046】
ここで、オゾン漏れが発生しているか、プラズマ発生器12に異常放電が発生していれば、ステップS103に進んで上記処理を行う(ステップS115においてYes、ステップS116においてYes)。なお、プラズマ発生器12に異常が発生していなければ、ステップS108に進む(ステップS116においてNo)。
【0047】
この発明の実施の形態1によれば、除菌性能が高く、かつ近年手軽に使用できるように
なったオゾンを用いて移動手摺4の除菌を行うことができる。また、プラズマ発生器12で発生したプラズマ(電子)によりオゾンを分解することで、次式(1)により発生するより強い殺菌力を持つ酸素原子、さらに水分が共存する場合には、次式(2)により発生するヒドロキシラジカル等の活性種を利用して除菌を行うことができる。
【0048】
O3+e→O+O2+e (1)
O+H2O→2OH (2)
ここで、eは電子を示す。
【0049】
即ち、上記構成の手摺除菌装置9であれば、オゾン発生器11から供給されたオゾンが、処理室19から連結部21、処理室20に送られる際に、そのオゾンから強い殺菌力をもつ酸素原子やヒドロキシラジカル等の活性種を発生させ、移動手摺4の表面(外側面、C字状の内側面)付近で、手摺表面全体に満遍なく酸素原子、ヒドロキシラジカル等の活性種、および分解しきれなかったオゾンを当てることができ、優れた除菌効果を発揮できる。
【0050】
また、上記構成の手摺除菌装置9であれば、オゾン発生器11から処理室内に供給されたオゾンがそのまま外部に排出されたり、オゾンが貫通孔23、24を通って外部に排出されたりする恐れもない。さらに、万一オゾン漏れが発生しても、その発生をオゾン検知器16によって直ちに検知することができ、オゾンの供給停止等、適切な動作を迅速に行うことができる。
【0051】
また、上記構成の手摺除菌装置9では、直前の所定時間内に人感センサ7によって検出された乗客数に基づいて、オゾン発生器11から処理室内に供給されるオゾンの量を調節している。このため、乗客が多い場合は、オゾン濃度およびプラズマ発生器12の出力を上げて除菌効率を高めたり、また、乗客が少ない場合は、無駄なオゾンの発生を防止したりする等、状況に応じた適切な運転を実現することが可能となる。
【0052】
なお、この発明の実施の形態1では、処理室20から配管30に取り込んだ空気を、オゾン分解触媒15を通過させてから外部に排出する場合について説明した。しかしながら、オゾンおよび酸素原子、ヒドロキシラジカル等の活性種には脱臭効果があるので、手摺除菌装置9において除菌のために使用したオゾン等を、エスカレータの他の部分で脱臭用として再利用してもよい。
【0053】
図5は、この発明の実施の形態1に係るマンコンベア用手摺除菌装置の他の構成を示す構成図であり、手摺除菌装置9の排気ガスを脱臭用として両利用する場合の構成を示したものである。
【0054】
図5に示す手摺除菌装置9は、図3に示すものからオゾン分解触媒15を取り除いたものに相当する。即ち、図5に示す手摺除菌装置9では、排気用ポンプ14が動作することによって処理室20から配管30内に吸引された空気は、その中に含まれるオゾンが分解されることなく、配管30を通過する。なお、排気用ポンプ14の先には、さらに配管32が接続されており、処理室20から吸引されたオゾンを含む空気は、この配管32を通って、エスカレータの主枠内(例えば、機械室内)に、または特定部位に向けてそのまま放出される。
【0055】
エスカレータでは、硫黄を含むオイルが使用されている場合がある。このような場合、例えば、排気用ポンプ14からオイルの使用部位まで配管32を延ばすことにより、オゾンを含む空気を配管32によってオイル使用部位まで導き、その使用部位に向けてオゾン(を含む空気)を放出する。これにより、硫黄特有の臭いをオゾンによって消すことができ、乗客の不快感を和らげることが可能となる。
【0056】
次に、図6を参照しながら、この発明の実施の形態1により得られた効果について説明する。図6は、この発明の実施の形態1に係るマンコンベア用手摺除菌装置の除菌効果を示す説明図である。
【0057】
図6は、オゾン単独で処理濃度10ppm、被処理対象物への曝露時間30分で処理した場合の微生物の生存率(C001)、オゾンなしでプラズマ発生器12の印加電圧2.3kVで処理した場合の微生物の生存率(C002)、オゾン濃度10ppm、プラズマ発生器12の印加電圧2.3kVで処理した場合の微生物の生存率(C003)を示している。なお、処理対象の微生物として、エスカレータの使用条件を加味し、乾燥した環境でも死滅しにくい表皮ブドウ球菌を用いた。
【0058】
図6より、オゾンだけでは死滅しない微生物に対しても、プラズマ発生器12のみの30分間の処理で、生存率が60%(除菌率40%)まで低下し、オゾンとプラズマ発生器12の併用で、生存率が2.5%(除菌率97.5%)まで低下する。このように、この発明の実施の形態1により、極めて高い除菌性能が得られることがわかった。
【0059】
実施の形態2.
この発明の実施の形態2においては、図7〜11を参照し、手摺除菌装置9の他の構成例について具体的な説明を行う。図7は、この発明の実施の形態2に係るマンコンベア用手摺除菌装置を示す構成図である。図8〜11は、この発明の実施の形態2に係るマンコンベア用手摺除菌装置の他の構成を示す構成図である。
【0060】
図7に示す手摺除菌装置9は、処理装置10、オゾン発生器11、高電圧電極22、循環用ポンプ33、オゾン分解触媒34、35、オゾン検知器16、動作制御部17により、その要部が構成される。
【0061】
図7において、処理装置10は、2つの処理室19、20が、連結部21の反対側で配管36によって連結されている。処理装置10の他の部分、およびオゾン発生器11、高電圧電極22、オゾン検知器16については、実施の形態1と同様の構成および機能を有するので、詳細な説明は省略する。
【0062】
循環用ポンプ33は、処理室内の空気を循環させるためのものである。循環用ポンプ33は、例えば、処理室19、20間を接続する配管36に設けられ、処理室20内の空気を、連結部21を介さずに処理室19へと送ることができるように構成されている。即ち、循環用ポンプ33が動作することにより、処理装置10内の空気は、処理室19、連結部21、処理室20、配管36を順次通って、再び処理室19に戻るように循環する。なお、循環用ポンプ33は、処理装置10内の空気を循環させる循環手段の一例として示したものである。上記機能を備えることができれば、循環手段として、例えばファン等の他の手段を採用しても構わない。
【0063】
オゾン分解触媒34、35は、処理室の内部において移動手摺4の周囲を取り巻くように、貫通孔23、24の各近傍に設置されている。オゾン分解触媒34、35の機能および設置目的は、上記オゾン分解触媒15と同様である。図7に示す手摺除菌装置9では、排気用ポンプ14が備えられていないので、オゾン供給中に処理室内を陰圧に保持しておくことができない。このため、処理室内の空気は、貫通孔23、24を通って処理装置10の外部に排出される。オゾン分解触媒34は、処理室19内の空気が貫通孔23を介して外部に排出される際に、その空気中に含まれるオゾンを分解する機能を有している。また、オゾン分解触媒35は、処理室20内の空気が貫通孔24を介して外部に排出される際に、その空気中に含まれるオゾンを分解する機能を有している。
【0064】
動作制御部17は、外部機器(例えば、制御盤5や人感センサ7等)からの入力信号や、タイマ31、オゾン検知器16からの入力信号等に基づいて、オゾン発生器11、高電圧電源25、循環用ポンプ33等の各動作を適切に制御し、例えば、図4に示す処理フローを実施する。
【0065】
この構成によれば、循環用ポンプ33によって処理室内の空気を適切に循環させることができ、オゾン発生器11から供給されたオゾンが、処理室19から連結部21、処理室20に送られる際に、そのオゾンから、高電圧電極22での分解により強い殺菌力をもつ酸素原子やヒドロキシラジカル等の活性種を発生させ、移動手摺4の表面(外側面・C字状の内側面)付近で、手摺方面全体に満遍なく酸素原子、ヒドロキシラジカル等の活性種、および分解しきれなかったオゾンを当てることができる。そのため、図3に示した手摺除菌装置9と同様に、優れた除菌効果を発揮できる。
【0066】
図8に示す手摺除菌装置9には、図3に示す各構成に加え、処理装置10にローラ37が設けられている。なお、ローラ37以外の構成については、図5または図7に示す構成が採用されていても構わない。
【0067】
実施の形態1では、処理装置10に2つの貫通孔23、24を形成し、この貫通孔23、24に移動手摺4を通して、移動手摺4の一部を処理室内に配置する場合について説明した。しかしながら、貫通孔23、24は、処理装置10の壁面に形成した単なる孔なので、排気用ポンプ14を駆動すると、移動手摺4と処理装置10との隙間(即ち、貫通孔23、24)から処理室内に空気が進入してしまう。なお、貫通孔23、24から処理室内に空気が進入すると、上述したように、処理室内のオゾン濃度が低下し、殺菌効率の低下を招いてしまう。
【0068】
そこで、図8に示す手摺除菌装置9では、処理室への出入口にローラ37を設置し、このローラ37によって、移動手摺4を処理室に通すための貫通孔23a、24aを形成している。具体的に、ローラ37は、移動手摺4を上下から挟み込むように配置され、外周面を移動手摺4に密着させたまま、移動手摺4の移動に連動して回転するように構成されている。ローラ37は、移動手摺4と密着する材質であって、移動手摺4の材質に、影響を与えない材質、例えば、ゴム等で構成される。
【0069】
ローラ37によって貫通孔23a、24aの全体を形成することができれば、移動手摺4と処理装置10との隙間を完全に閉塞して、当該部分からの空気の進入を完全に防止することができる。しかしながら、貫通孔23a、24aの全体を形成することができなくても、ローラ37によって少なくともその一部を形成することができれば、当該部分からの空気の進入を大幅に低減することができ、処理室内を高いオゾン濃度に維持することが可能となる。
【0070】
なお、貫通孔23a、24aは、移動手摺4がローラ37間に進入することによって初めて形成されるものであってもよいし、移動手摺4が存在しない状態で、処理室内に開口するものであってもよい。なお、ローラ37について記述を行ったが、空気の侵入を大幅に低減できる方法であればよく、例えば、カーテン状のシートを貫通孔23、24近傍に備えることで同様の効果を得ることができる。
【0071】
図9上に示す手摺除菌装置9には、塗布・拭取装置38が設けられている。なお、塗布・拭取装置38以外の構成については、図3、5、7、8に示す何れの構成が採用されていても構わない。
【0072】
塗布・拭取装置38は、処理装置10の処理室内または処理室の手前で、移動手摺4に水または洗剤を塗布し、拭き取る機能を有している。なお、図9では、処理装置10の外部に塗布・拭取装置38を設置し、処理室の手前で水を塗布し、拭き取るものを一例として示している。塗布・拭取装置38は、例えば、水を染み込ませた布39を移動手摺4の移動に合わせて繰り出すことにより、この布39を、処理室に進入する直前の移動手摺4の表面に接触させて水を塗布し、汚れの拭き取りを行う。
【0073】
図9に示す手摺除菌装置9では、水が塗布された移動手摺4を処理室内に進入させることにより、移動手摺4の表面上の水分と処理室内のオゾン、プラズマ発生器12により発生した酸素原子とを反応させてヒドロキシラジカルを生成し、移動手摺4の除菌を行う。この構成によっても、より除菌効果の優れた手摺除菌装置9を提供することができる。
【0074】
図10に示す手摺除菌装置9は、処理装置10、オゾン発生器11、高電圧電極22、排気用ポンプ14、オゾン分解触媒15、オゾン検知器16、ブラシ装置40、動作制御部17により、その要部が構成される。
【0075】
この手摺除菌装置9では、処理室19内にオゾン供給口29、高電圧電極22および後述のブラシ装置40が設けられている。なお、処理装置10の他の部分、およびオゾン発生器11、プラズマ発生器12、排気用ポンプ14、オゾン分解触媒15、オゾン検知器16、動作制御部17については、実施の形態1と同様の構成および機能を有するので、詳細な説明は省略する。
【0076】
ブラシ装置40は、処理室19内で移動手摺4の表面に付着したゴミを取り除くためのものである。ブラシ装置40は、例えば、ロータ軸41に連結された三連のブラシ42を備えており、ブラシ42を移動手摺4の表面に接触させて付着したゴミを掻き落とす。また、ブラシ装置40では、定期的にロータ軸41を回転させて一部のブラシ42を休ませ、その休ませたブラシ42を洗浄液に浸して処理室19内でブラシ42の洗浄を行う。
【0077】
なお、図10に示すブラシ装置40には、三連のブラシ42が備えられているが、これは単に一例を示したものである。ブラシ装置40は、少なくとも2つのブラシを備え、それらがゴミの掻き落としと洗浄とを周期的に移動する構成を有していればよい。
【0078】
この構成によれば、オゾンによって移動手摺4の表面全体を除菌しながら、移動手摺4の表面に付着しているゴミをブラシ装置40によって取り除くことができる。なお、ブラシ装置40によって処理室19内に掻き落とされたゴミにも菌が含まれているが、この菌についても、オゾン発生器11から処理室19内に供給されたオゾンによって除菌することができる。また、ブラシ42が処理室19内で定期的に洗浄されるので、ブラシ42自体を清潔に保つこともできる。
【0079】
図11に示す手摺除菌装置9は、処理装置10、オゾン発生器11、高電圧電極22、排気用ポンプ14、オゾン分解触媒15、オゾン検知器16、ブラシ装置43、動作制御部17により、その要部が構成される。
【0080】
この手摺除菌装置9では、処理装置10に2つの処理室44、45が形成されており、処理室44、45は、弁46を介して上下に連結されている。上側の処理室44は、移動手摺4が通過するための空間を形成する。即ち、貫通孔23、24は、処理室44に開口しており、移動手摺4は、処理装置10内において、貫通孔23、処理室44、貫通孔24を順次貫通するように配置される。処理室44は、弁46を介して下側の処理室45に連結されており、弁46の設置位置が最下となるように、例えば、その底面が斜めに形成されている。
【0081】
また、処理室44には、その内部にブラシ装置43が設けられている。ブラシ装置43は、処理室44内において移動手摺4の表面に付着したゴミを取り除くためのものである。ブラシ装置43によって移動手摺4の表面から掻き落とされたゴミは、処理室44の底面を滑って弁46に達し、さらに弁46を通過して下側の処理室45内に落下する。下側の処理室45は、酸素原子やヒドロキシラジカル等の活性種、およびオゾンによって、上記ゴミに含まれる菌を除菌するための空間を形成する。
【0082】
即ち、オゾン供給口29から供給されたオゾンは、高電圧電極22を通して、オゾン、酸素原子、ヒドロキシラジカル等に変換されて処理室45内に供給される。また、排気用ポンプ14に接続された配管30は、処理室45に開口するように処理装置10に接続されている。このため、排気用ポンプ14が駆動している間は、処理室45が陰圧に保たれており、オゾン供給口29から処理室44内に供給されたオゾンは、弁46を通って処理室45に進入し、配管30を通ってオゾン分解触媒15で分解される。
【0083】
この構成によれば、移動手摺4の表面に付着しているゴミをブラシ装置43によって取り除き、そのゴミに含まれる菌を殺菌力の高い活性粒子によって除菌することができる。なお、手摺除菌装置9としてこの発明の実施の形態2に係る各構成を採用しても、除菌性能が高く、かつ近年手軽に使用できるようになったオゾンを用いて移動手摺4の除菌を行うことができる。また、この発明の実施の形態2において説明しなかった事項については、実施の形態1と同様である。
【0084】
実施の形態3.
図12は、この発明の実施の形態3に係るマンコンベア用手摺除菌装置を示す構成図である。図13は、図12に示すマンコンベア用手摺除菌装置の底面を示す底面図である。
【0085】
図12、13に示す手摺除菌装置50は、上記手摺除菌装置9と同様に、除菌性能が高く、かつ近年手軽に使用できるようになったオゾンを用いて移動手摺4を除菌する機能を備えている。この可搬型の手摺除菌装置50は、例えば、処理装置51、オゾン発生器52、高電圧電極53、高電圧電源54、攪拌ファン55、シール材56、動作制御部(図示せず)により、その要部が構成されている。
【0086】
処理装置51は、例えば、上部に把手57が設けられ、その内部に、下方に開口する処理室58が形成されている。上記開口は、移動手摺4の幅よりも僅かに狭い幅の長方形状を呈しており、この開口を形成する処理装置51の縁部全体にシール材56が設けられている。
【0087】
オゾン発生器52、高電圧電極53、高電圧電源54および攪拌ファン55は、上記オゾン発生器11、高電圧電極22、高電圧電源25および攪拌ファン13と同様の機能を有している。即ち、オゾン発生器52は、処理室58内にオゾンを供給する機能を有し、攪拌ファン55は、オゾン発生器52から処理室58内に供給されたオゾンを処理室58内で攪拌させる機能を有し、高電圧電源54は、高電圧電極53に電圧を供給し、高電圧電極53は、オゾン発生器52で発生したオゾンを分解する機能を有している。オゾン発生器52、高電圧電源54および攪拌ファン55の動作は、例えば、ON/OFF釦等の入力信号に基づいて、動作制御部によって制御される。
【0088】
上記構成の手摺除菌装置50を使用する場合、エスカレータの保守員は、把手57を持って処理装置51(装置全体)を持ち上げ、処理装置51の下面に形成された上記開口が移動手摺4によって塞がれるように、処理装置51を移動手摺4に載せる。そして、保守員は、その状態で処理装置51を移動手摺4に押し付けることにより、シール材56を移動手摺4の上面に密着させて、処理室58を所定の密閉状態で外気から遮断する。即ち、この状態で処理室58内をオゾンで充満させることにより、高電圧電極53でオゾンが分解した酸素原子やヒドロキシラジカル、窒素酸化物等の活性種またはオゾン等で、上記開口を介して処理室58に面する移動手摺4の表面を除菌することができる。
【0089】
なお、移動手摺4はステップ1と同期して移動するので、例えば、処理装置51の上記縁部にローラを回軌自在に固定し、このローラの表面にシール材56を設けてもよい。かかる構成であれば、ローラの表面に設けられたシール材56が移動手摺4に押し付けられると、移動手摺4の移動に連動してローラが回転し、処理室58の密閉状態を確保したまま除菌処理を行うことができる。
【符号の説明】
【0090】
1 ステップ、2 デッキボード、3 内側板、4 移動手摺、5 制御盤、6 ポール、7 人感センサ、8 温湿度計、9、50 手摺除菌装置、10、51 処理装置、11、52 オゾン発生器、12 プラズマ発生器、13、55 攪拌ファン、14 排気用ポンプ、15、34、35 オゾン分解触媒、16 オゾン検知器、17 動作制御部、18 仕切り板、19 処理室(第1処理室)、20 処理室(第2処理室)、21 連結部、22、53 高電圧電極、23、23a 貫通孔(第1貫通孔)、24、24a 貫通孔(第2貫通孔)、25、54 高電圧電源、26 電源、27、28 制御器、29 オゾン供給口、30、32、36 配管、31 タイマ、33 循環用ポンプ、37 ローラ、38 塗布・拭取装置、39 布、40、43 ブラシ装置、41 ロータ軸、42 ブラシ、44、45、58 処理室、46 弁、56 シール材、57 把手。
【特許請求の範囲】
【請求項1】
マンコンベアのステップと同期して移動する移動手摺を除菌するためのマンコンベア用手摺除菌装置であって、
前記移動手摺の除菌を行うための処理室を有する処理装置と、
前記処理室内にオゾンを供給するオゾン発生器と、
高電圧電極および高電圧電源により構成され、供給された前記オゾンを分解するためのプラズマを発生するプラズマ発生器と、
を備えたことを特徴とするマンコンベア用手摺除菌装置。
【請求項2】
前記処理装置には、前記処理室に開口する第1貫通孔および第2貫通孔が形成され、前記移動手摺が、前記第1貫通孔、前記処理室、前記第2貫通孔を順次貫通し、
前記処理室内の空気を外部に排出する排気用ポンプと、
前記排気用ポンプによって排出される空気中のオゾンを分解するオゾン分解触媒と、
をさらに備えたことを特徴とする請求項1に記載のマンコンベア用手摺除菌装置。
【請求項3】
前記処理装置には、前記処理室に開口する第1貫通孔および第2貫通孔が形成され、前記移動手摺が、前記第1貫通孔、前記処理室、前記第2貫通孔を順次貫通し、
前記処理室内の空気を外部に排出し、前記処理室を陰圧に保つ排気用ポンプと、
前記排気用ポンプによって排出される空気中のオゾンを分解するオゾン分解触媒と、
をさらに備えたことを特徴とする請求項1に記載のマンコンベア用手摺除菌装置。
【請求項4】
前記処理装置には、前記処理室に開口する第1貫通孔および第2貫通孔が形成され、前記移動手摺が、前記第1貫通孔、前記処理室、前記第2貫通孔を順次貫通し、
前記処理室内の空気を外部に排出し、前記処理室を陰圧に保つ排気用ポンプ
をさらに備えたことを特徴とする請求項1に記載のマンコンベア用手摺除菌装置。
【請求項5】
前記排気用ポンプによって前記処理室内から吸引されたオゾン、並びに前記オゾンが分解された酸素原子、ヒドロキシラジカルおよび窒素酸化物のうち、少なくとも1つを含む空気を、所定のオイル使用部位まで導くための配管
をさらに備えたことを特徴とする請求項4に記載のマンコンベア用手摺除菌装置。
【請求項6】
前記処理装置は、前記処理室として、第1処理室と、第2処理室と、前記第1処理室および前記第2処理室を連結する連結部とを有し、前記第1貫通孔が前記第1処理室に、前記第2貫通孔が前記第2処理室にそれぞれ開口するとともに、前記移動手摺が、前記第1貫通孔、前記第1処理室、前記連結部、前記第2処理室、前記第2貫通孔を順次貫通し、
前記オゾン発生器は、オゾン供給口を通じて、前記第1処理室内にオゾンを供給し、
前記高電圧電極は、前記連結部に設けられ、
前記排気用ポンプは、前記第2処理室内の空気を外部に排出する
ことを特徴とする請求項2から請求項5までの何れか1項に記載のマンコンベア用手摺除菌装置。
【請求項7】
周囲の温度および湿度を測定する温湿度計と、
前記温湿度計によって測定された温度および湿度に基づいて、前記オゾン発生器から前記処理室内に供給されるオゾンの量を調節するとともに、前記オゾンの供給量に基づいて、前記高電圧電源から前記高電圧電極に印加される電圧の大きさを調節する動作制御部と、
をさらに備えたことを特徴とする請求項1から請求項6までの何れか1項に記載のマンコンベア用手摺除菌装置。
【請求項8】
前記マンコンベアの乗客を検出する人感センサと、
前記人感センサが最後の乗客を検出してから所定時間が経過すると、前記オゾン発生器からのオゾンの供給を停止させるとともに、前記高電圧電極への電圧の印加を停止させる動作制御部と、
をさらに備えたことを特徴とする請求項1から請求項7までの何れか1項に記載のマンコンベア用手摺除菌装置。
【請求項9】
前記マンコンベアの乗客を検出する人感センサと、
直前の所定時間内に前記人感センサが検出した乗客数に基づいて、前記オゾン発生器から前記処理室内に供給されるオゾンの量、および前記高電圧電源から前記高電圧電極に印加される電圧の大きさを調節する動作制御部と、
をさらに備えたことを特徴とする請求項1から請求項7までの何れか1項に記載のマンコンベア用手摺除菌装置。
【請求項10】
前記処理装置の前記処理室は、一側に開口し、前記開口を形成する縁部にシール材が設けられ、
前記移動手摺に前記処理装置を適切に押し付けることにより、前記シール材が前記移動手摺の表面に密着し、前記処理室が所定の密閉状態で外気から遮断される
ことを特徴とする請求項1に記載のマンコンベア用手摺除菌装置。
【請求項1】
マンコンベアのステップと同期して移動する移動手摺を除菌するためのマンコンベア用手摺除菌装置であって、
前記移動手摺の除菌を行うための処理室を有する処理装置と、
前記処理室内にオゾンを供給するオゾン発生器と、
高電圧電極および高電圧電源により構成され、供給された前記オゾンを分解するためのプラズマを発生するプラズマ発生器と、
を備えたことを特徴とするマンコンベア用手摺除菌装置。
【請求項2】
前記処理装置には、前記処理室に開口する第1貫通孔および第2貫通孔が形成され、前記移動手摺が、前記第1貫通孔、前記処理室、前記第2貫通孔を順次貫通し、
前記処理室内の空気を外部に排出する排気用ポンプと、
前記排気用ポンプによって排出される空気中のオゾンを分解するオゾン分解触媒と、
をさらに備えたことを特徴とする請求項1に記載のマンコンベア用手摺除菌装置。
【請求項3】
前記処理装置には、前記処理室に開口する第1貫通孔および第2貫通孔が形成され、前記移動手摺が、前記第1貫通孔、前記処理室、前記第2貫通孔を順次貫通し、
前記処理室内の空気を外部に排出し、前記処理室を陰圧に保つ排気用ポンプと、
前記排気用ポンプによって排出される空気中のオゾンを分解するオゾン分解触媒と、
をさらに備えたことを特徴とする請求項1に記載のマンコンベア用手摺除菌装置。
【請求項4】
前記処理装置には、前記処理室に開口する第1貫通孔および第2貫通孔が形成され、前記移動手摺が、前記第1貫通孔、前記処理室、前記第2貫通孔を順次貫通し、
前記処理室内の空気を外部に排出し、前記処理室を陰圧に保つ排気用ポンプ
をさらに備えたことを特徴とする請求項1に記載のマンコンベア用手摺除菌装置。
【請求項5】
前記排気用ポンプによって前記処理室内から吸引されたオゾン、並びに前記オゾンが分解された酸素原子、ヒドロキシラジカルおよび窒素酸化物のうち、少なくとも1つを含む空気を、所定のオイル使用部位まで導くための配管
をさらに備えたことを特徴とする請求項4に記載のマンコンベア用手摺除菌装置。
【請求項6】
前記処理装置は、前記処理室として、第1処理室と、第2処理室と、前記第1処理室および前記第2処理室を連結する連結部とを有し、前記第1貫通孔が前記第1処理室に、前記第2貫通孔が前記第2処理室にそれぞれ開口するとともに、前記移動手摺が、前記第1貫通孔、前記第1処理室、前記連結部、前記第2処理室、前記第2貫通孔を順次貫通し、
前記オゾン発生器は、オゾン供給口を通じて、前記第1処理室内にオゾンを供給し、
前記高電圧電極は、前記連結部に設けられ、
前記排気用ポンプは、前記第2処理室内の空気を外部に排出する
ことを特徴とする請求項2から請求項5までの何れか1項に記載のマンコンベア用手摺除菌装置。
【請求項7】
周囲の温度および湿度を測定する温湿度計と、
前記温湿度計によって測定された温度および湿度に基づいて、前記オゾン発生器から前記処理室内に供給されるオゾンの量を調節するとともに、前記オゾンの供給量に基づいて、前記高電圧電源から前記高電圧電極に印加される電圧の大きさを調節する動作制御部と、
をさらに備えたことを特徴とする請求項1から請求項6までの何れか1項に記載のマンコンベア用手摺除菌装置。
【請求項8】
前記マンコンベアの乗客を検出する人感センサと、
前記人感センサが最後の乗客を検出してから所定時間が経過すると、前記オゾン発生器からのオゾンの供給を停止させるとともに、前記高電圧電極への電圧の印加を停止させる動作制御部と、
をさらに備えたことを特徴とする請求項1から請求項7までの何れか1項に記載のマンコンベア用手摺除菌装置。
【請求項9】
前記マンコンベアの乗客を検出する人感センサと、
直前の所定時間内に前記人感センサが検出した乗客数に基づいて、前記オゾン発生器から前記処理室内に供給されるオゾンの量、および前記高電圧電源から前記高電圧電極に印加される電圧の大きさを調節する動作制御部と、
をさらに備えたことを特徴とする請求項1から請求項7までの何れか1項に記載のマンコンベア用手摺除菌装置。
【請求項10】
前記処理装置の前記処理室は、一側に開口し、前記開口を形成する縁部にシール材が設けられ、
前記移動手摺に前記処理装置を適切に押し付けることにより、前記シール材が前記移動手摺の表面に密着し、前記処理室が所定の密閉状態で外気から遮断される
ことを特徴とする請求項1に記載のマンコンベア用手摺除菌装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−6642(P2013−6642A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−139180(P2011−139180)
【出願日】平成23年6月23日(2011.6.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月23日(2011.6.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]