
マンコンベア移動手摺のテンション付加装置
【課題】簡単な構成により押圧力を最適値に調整することができ、調整に必要な手間と時間を低減したマンコンベア移動手摺のテンション付加装置を提供する。
【解決手段】無端状の移動手摺の帰路側に配置され、所定の押圧力で前記移動手摺に当接し、前記移動手摺にテンションを付加する当接部と、この当接部を上下方向に案内する手段と、前記当接部を下方向への変位は許容するが上方向への変位を拘束する拘束手段と、を備え、前記当接部は、リンク部材に回転自在に設けられた複数個のローラであり、前記リンク部材は前記当接部本体に回動自在に取り付けられている。
【解決手段】無端状の移動手摺の帰路側に配置され、所定の押圧力で前記移動手摺に当接し、前記移動手摺にテンションを付加する当接部と、この当接部を上下方向に案内する手段と、前記当接部を下方向への変位は許容するが上方向への変位を拘束する拘束手段と、を備え、前記当接部は、リンク部材に回転自在に設けられた複数個のローラであり、前記リンク部材は前記当接部本体に回動自在に取り付けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はマンコンベア装置に関し、特に、マンコンベア移動手摺のテンション付加装置に関する。
【背景技術】
【0002】
マンコンベアに用いられている従来の移動手摺及びそのテンション付加装置について、図8と図9を用いて説明する。
【0003】
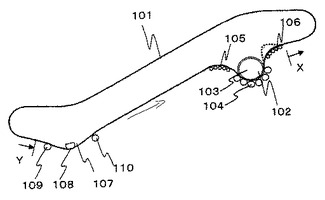
まず、その構造について説明する。図8は移動手摺駆動システム全体を示した正面図である。無端状の移動手摺101は駆動装置102に巻き掛けられ、駆動プーリ103と押し付けローラ104により挟まれている。駆動プーリ103を所定の方向に回転させることで、駆動プーリ103と移動手摺101の間の摩擦力で、移動手摺101は駆動される。
【0004】
移動手摺101の横断面はC字形状となっている。乗客が移動手摺101を持つことができるようにC字形状の開口部が下を向いて移動手摺101が走行する部分を往路側と称 している。また、移動手摺101が反転し、開口部が上を向いて移動手摺101が走行する部分を帰路側と称している。
【0005】
移動手摺101は案内レール(図示せず)に沿って駆動される。図8では、X部から図の反時計回りにY部までの往路側に、案内レールが設置されている。
【0006】
駆動装置102の前後には、駆動下部案内ローラ105と、駆動上部案内ローラ106が設置されており、移動手摺101が駆動装置102に入る際に、急角度で屈曲することなくスムーズに変形するようになっている。移動手摺101の帰路側の下部には、たるみ取り部107が設けられている。たるみ取り部107にはテンション付加装置108が設けられ、移動手摺101に図の下方向に押圧力を付加することで、移動手摺101に適切なテンションを与え、たるみを吸収するようになっている。
【0007】
たるみ取り部107の前後には、たるみ取り下部案内ローラ109と、たるみ取り上部 案内ローラ110が設置されており、移動手摺101がたるみ取り部107に入る際に、急角度で屈曲することなくスムーズに変形するようになっている。
【0008】
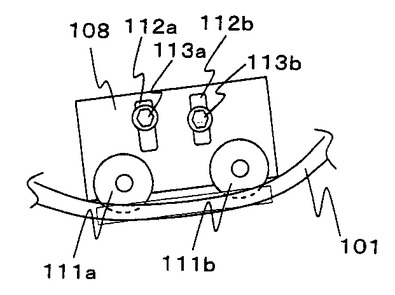
図9はたるみ取り部107を拡大し、従来のテンション付加装置108を示した正面図である。テンション付加装置108は移動手摺101の開口部で移動手摺101と当接する当接ローラ111a,111bを有し、この部分で移動手摺101に図の下方向に押圧力を付加している。テンション付加装置108には長穴112a,112bが設けられており、この部分にボルト113a,113bを通し、エスカレータのトラスの部材(図示せず)に固定されている。
【0009】
次に、テンション付加装置108の調整方法について説明する。調整は、以下のステップで実施される。
【0010】
[ステップ1]移動手摺101の運転を停止する。
[ステップ2]テンション付加装置108を固定しているボルト113a,113bを緩めるか取り外し、テンション付加装置108が自由に変位できるようにする。
[ステップ3]移動手摺101を上昇方向(図8では時計回り)に運転し、移動手摺101のたるみを、たるみ取り部107に集める。
[ステップ4]テンション付加装置108を下方向に押付け、当接ローラ111a,111bから移動手摺101に適切な押圧力を付加するようにする。
[ステップ5]テンション付加装置108を固定しているボルト113a,113bを締め付け、テンション付加装置108を固定する。
[ステップ6]移動手摺101の運転を再開する。
【0011】
上記の[ステップ4]で移動手摺101に付加する押圧力が大きすぎると、移動手摺101のテンションが過度に大きくなり、走行抵抗が過大になる。移動手摺101の走行抵抗が過大になると、各部の摩耗や発熱が急増したり、移動手摺101の寿命が短くなるなど、様々な問題が生じてくる。
【0012】
また、移動手摺101に付加する押圧力が小さすぎると、移動手摺101のたるみが取り切れず、移動手摺101を下降方向(図8では反時計回り)に運転した場合、駆動装置102から取り切れなかったたるみが上方に押出され、駆動上部案内ローラ106の付近で移動手摺101が図8の破線のように屈曲してしまう。このような状況で移動手摺101が走行すると、移動手摺101が案内レールの端部(図8のX部)と擦れ、激しく摩耗したり、ノッキングと呼ばれる大きな振動が移動手摺101に生じたりするなど、別の問題が生じてくる。
【0013】
押圧力は2つの当接ローラ111a,111bから移動手摺101に付加するようになっている。2つの当接ローラ111a,111bの片方だけから大きな押圧力が作用すると、その部分で移動手摺101は局部的な屈曲する可能性があり好ましくない。このため、適切に押圧力を付加するには、2つの当接ローラ111a,111bから同じ力が作用するようにテンション付加装置108を微妙に傾けて取り付ける必要もあった。
【0014】
このように、移動手摺101に付加する押圧力を適切に調整することが大切であるが、この調整には保守員の経験や勘に頼る場合が多く、最適値に押圧力を調整することができないという問題があった。
【0015】
また、上記ステップで示したように、テンション付加装置108の調整には、テンション付加装置108を微妙に傾けながらボルト113a,113bを緩めたり締め付けたりする作業が含まれ、現地の狭いスペースでこれらの作業を行うには、多くの手間と時間が必要になるという問題もあった。
【0016】
これらの問題を解決する手段として公開特許公報特開2006−8388号に、乗客コンベア移動手摺りのテンション調整装置が提案されている。これは、無端状に配置され、その折返し走行路の傾斜直線下部から水平部へと移行する屈曲部に所定の押圧力を有して押しガイドが当接する乗客コンベア移動手摺りのテンション調整を、移動手摺りの曲線部に音響検出手段を設けるとともに、移動手摺り押しガイドを移動手摺り摺動面垂直方向に押しガイド移動手段を設けたことを特徴としている。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開2006−8388号公報
【発明の概要】
【発明が解決しようとする課題】
【0018】
特許文献1に提案されている方法では、音響検出手段や押しガイド移動手段などの非常に高価な装置が必要となり、コストが大幅に増加するという大きな問題があった。本発明はこのような問題を解決するために成されたものであり、その目的は、高価な装置を使用することなく、最適値に押圧力を調整することができ、調整に必要な手間と時間を低減したマンコンベア移動手摺のテンション付加装置を安価に提供することである。
【課題を解決するための手段】
【0019】
本発明のマンコンベア移動手摺のテンション付加装置は、無端状の移動手摺の帰路側に配置され、所定の押圧力で前記移動手摺に当接し、前記移動手摺にテンションを付加する当接部と、この当接部を上下方向に案内する手段と、前記当接部を下方向への変位は許容するが上方向への変位は拘束する手段とを備えていることを特徴とするものである。
【発明の効果】
【0020】
本発明によれば、簡単な構成の装置により、押圧力を短時間に最適値に調整が可能なマンコンベア移動手摺のテンション付加装置を得ることができる。
【図面の簡単な説明】
【0021】
【図1】本発明のテンション付加装置の本体部分を示した正面図。
【図2】本発明のテンション付加装置の本体部分を示した側面図。
【図3】図1のA−A断面の平面図。
【図4】本発明のテンション付加装置を示した正面図。
【図5】図4のB−B断面の平面図。
【図6】図4のC−C断面の拡大側面図。
【図7】ラチェット機構可動部とラチェット機構固定部の動きを説明した図4のC−C断面の拡大側面図。
【図8】従来の移動手摺駆動システム全体を示した正面図。
【図9】従来のテンション付加装置を示した正面図。
【発明を実施するための形態】
【0022】
以下、本発明にかかわるマンコンベア移動手摺のテンション付加装置を図面を参照して説明する。なお、図8で説明した従来の移動手摺駆動システムと比べ、変更しているのはテンション付加装置108だけであり、その他の部分の変更はない。
【0023】
(実施例1)
まず、図1乃至図6を用いて実施例1の構成を説明する。
【0024】
本発明のマンコンベア移動手摺のテンション付加装置201の説明の前に、テンション付加装置201の主要部分である本体部分1について説明し、その後、最終形状のテンション付加装置201について説明する。
【0025】
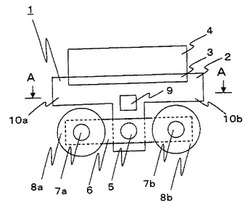
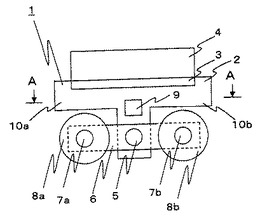
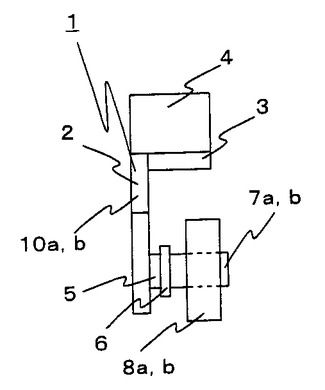
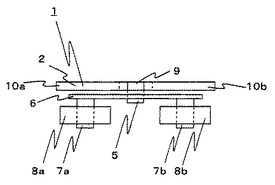
図1、図2、図3は、本発明のマンコンベア移動手摺のテンション付加装置201の本体部分1を示したものである。図1は正面図、図2は側面図、図3は第1図のA−A断面の平面図である。
【0026】
本体部分1の中央には垂直T形部材2が配置されている。垂直T形部材2の上部には、水平部材3が正面方向に突き出すように取り付けられている。水平部材3の上部には調整重り4が取り付けられている。なお、調整重り4は、ボルトなどの適切な取り付け手段により、水平部材3への着脱が自由にできるようになっている。
【0027】
垂直T形部材2の下部には、T形部材軸5を介して、ローラリンク6の中央部が回動自在に取り付けられている。ローラリンク6の両端には、ローラ軸7a,7bを介して、当接ローラ8a,8bが回動自在に取り付けられている。
【0028】
垂直T形部材2の中央部には、後述するラチェット機構を取り付ける穴9が設けられている。また、垂直T形部材2の両端部には、後述するレールと係合する係合部10a,10bが設けられている。
【0029】
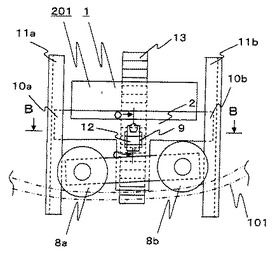
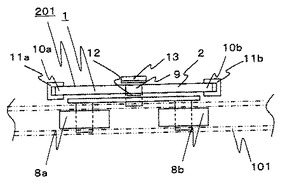
図4、図5は、前述した本体部分1に、ラチェット機構とレールを取り付けた最終形状のテンション付加装置201を示したものである。図4は正面図、図5は図4のB−B断面の平面図である。
【0030】
本体部分1の左右には、レール11a,11bが設置されている。レール11a,11bは、コ字形の断面形状になっており、その開口部が互いに向き合うように配置されている。レール11a,11bはいずれも、トラスの部材(図示せず)などに強固に固定されている。レール11a,11bの開口部には、垂直T形部材2の両端部の係合部10a,11bが係合している。このため、本体部分1はレール11a,11bに沿って案内され、上下方向に自由に移動できるようになっている。
【0031】
垂直T形部材2の中央部の穴9には、ラチェット機構可動部12が取り付けられている。垂直T形部材2の背面側には、ラチェット機構固定部13が配置されている。ラチェット機構固定部13は、トラスの部材(図示せず)などに強固に固定されている。
【0032】
なお、移動手摺101は、図の想像線(2点破線)で示される位置に配置され、当接ローラ8a,8bにより、本体部分lの重量に対応した押圧力が下方向に作用するようになっている。
【0033】
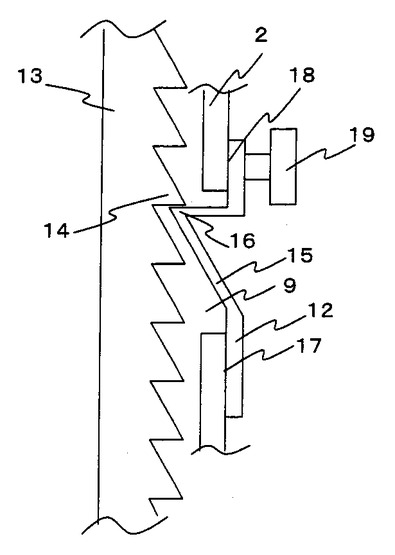
図6は図4のC−C断面を拡大した側面図である。
【0034】
ラチェット機構固定部13は、断面が鋸歯状の段差部(歯)14を複数個有している。ラチェット機構可動部12は、穴9を通りラチェット機構固定部13側に屈曲したバネ部15を有している。バネ部15の先端は鋭角的に折り返された噛み合い部16を形成し、前述の段差部14の1つと噛み合っている。
【0035】
ラチェット機構可動部12は、穴9の下側の固定部17で、溶接などの適切な手段で垂直T形部材2に強固に固定されている。穴9の上側には接触部18が設けられている。接触部18は、バネ部15の弾性変形による力で垂直T形部材2に押付けられている。
【0036】
接触部18にはつまみ19が設けられている。つまみ19を持ち、図6の右方向に引張れば、バネ部15が変形し、接触部18が垂直T形部材2から離れ、噛み合い部16と歯14との噛み合いが外れるようになっている。
【0037】
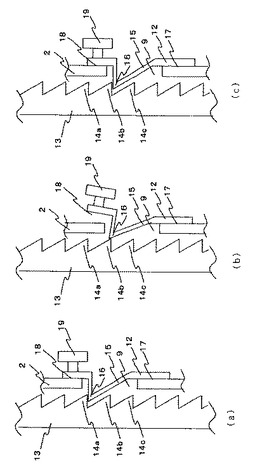
次に、実施例1の作用を説明する。
まず、図7を用いてラチェット機構可動部12とラチェット機構固定部13の作用を説明する。図7は本体部分1が下方向に変位する時の、ラチェット機構可動部12とラチェット機構固定部13の動きを説明したものである。ラチェット機構固定部13は固定されており動かないが、ラチェット機構可動部12は図7の(a)(b)(c)の順で動いていく。図7(a)は、図6と同じであるが、複数個ある鋸歯状の段差部14を区別するため、14a〜bの符号をつけて区別した。
【0038】
図7(a)の状態では、ラチェット機構固定部13の段差部14aと、ラチェット機構可動部12の噛み合い部16が噛み合っており、この状態ではラチェット機構可動部12は上方向には変位できないようになっている。ラチェット機構可動部12が下方向に変位すると、噛み合い部16は下方向に変位し、次の段差部14bに接触する。さらに変位すると、噛み合い部16は段差部14bの斜面に沿って移動する。この時、噛み合い部16は下方向に変位すると共に、図の右方向へも変位するので、ラチェット機構可動部12のバネ部15がたわみ、接触部18が垂直T形部材2から離れ、結局、噛み合い部16が段差部14bの頂点に乗り上げた図7(b)の状態になる。さらに、ラチェット機構可動部12が下方向に変位すると、噛み合い部16は段差部14bの頂点から外れ、バネ部15の弾性力で図の左方向に変位し、図7(c)のように噛み合い部16は段差部14bと噛み合うようになる。
【0039】
図7(c)の状態は図7(a)の状態と同様に、ラチェット機構可動部12は上方向には変位できないが、下方向には前述の動作を繰り返すことで変位可能になっている。以上述べたような動作をラチェット機構可動部12とラチェット機構固定部13が行うことで、本体部分lは下方向への変位は許容するが上方向の変位は拘束するようになっている。なお、以上の説明において、ラチェット機構可動部12の移動方向を上下方向と説明したが、より正確には、押圧すべき移動手摺101の面から離れる方向と押圧すべき移動手摺101の面に接近する方向を意味している。以下の説明でも同様である。
【0040】
また、接触部18に設けられたつまみ19を引張れば、噛み合い部16と段差部14との噛み合いが外れるようになっている。このため、つまみ19を引張れば、本体部分1の上方向の変位拘束を外すことができ、本体部分1は上方向にも変位できるようになる。
【0041】
次に、本発明によるテンション付加装置201を用いた調整方法について説明する。調整は、以下のステップで実施される。
【0042】
[ステップ1]移動手摺1 01の運転を停止する。
[ステップ2]必要あれば、本体部分1の調整重り4を取り付けあるいは取り換える。
[ステップ3]必要あれば、ラチェット機構可動部12のつまみ19を引張り、噛み合い部16と歯14との噛み合いが外れた状態で、本体部分1を上方向に持ち上げ、そのままそっと下ろす。
[ステップ4]移動手摺101を上昇方向(図8では時計回り)に運転し、移動手摺101のたるみを、たるみ取り部107に集める。
[ステップ5]移動手摺101の運転を再開する。
【0043】
上記の各ステップでの作用について説明する。但し、[ステップ1]は、初期据付時には移動手摺101はまだ運転していないので、このステップは省略することができる。また、保守時では、移動手摺101の運転を停止するだけである。このため、[ステップ1]での作用の説明は省略する。
【0044】
まず[ステップ2]での作用について説明する。調整重り4は、ボルトなどの適切な取り付け手段により、本体部分1の水平部材3に着脱が自由にできるようになっている。このため、据付時には所定の重量を持つ調整重り4を取り付ければ良い。また、保守時に重量の異なる調整重り4に交換する必要がある場合は交換し、交換する必要がない場合はこのステップを省略することができる。
【0045】
調整重り4の重量を変更することによって、本体部分1の重量を変更することができる。前述したように、当接ローラ8a,8bにより、本体部分1の重量に対応した押圧力が移動手摺101に作用するようになっている。このため、調整重り4の重量を調整することで移動手摺101に作用させる押圧力を変化させることができる。
【0046】
最適の押圧力は、階高や機種によって異なる。このため、階高や機種によって最適となる押圧力を事前に求めておき、それに対応した重量をもつ調整重り4を取り付ければ、最適の押圧力を移動手摺101に作用させることができる。
【0047】
次に[ステップ3]での作用について説明する。なお、初期据付時にはこのステップは省略することができる。また、保守時に[ステップ2]で重量の少ない調整重り4に交換した場合や、再調整を行う場合には、ラチェット機構可動部12のつまみ19を引張り、噛み合い部16と段差部14との噛み合いが外れた状態で、本体部分lを上方向に持ち上げ、そのままそっと下ろす。こうすることで、移動手摺101に作用する押圧力を初期化することができる。
【0048】
次に[ステップ4]での作用について説明する。
移動手摺101を上昇方向に運転すると、移動手摺101のたるみは、たるみ取り部107に集まってくる。たるみ取り部107にはテンション付加装置201が配置されている。たるみが集まるにつれ、テンション付加装置201の本体部分1は、その重量で下方向に変位し、本体部分lの重量に対応した押圧力が当接ローラ8a,8bを介して移動手摺101に作用する。押圧力と移動手摺1 01のテンションがバランスする位置に達すると、本体部分1はこれ以上下方向には変位せず、最適なテンションを移動手摺101に作用させた状態で静止する。
【0049】
2つの当接ローラ8a,8bはローラリンク6の両端に取り付けられ、ローラリンク6の中央部は垂直T形部材2の下部にT形部材軸5を介して回動自在に取り付けられている。2つの当接ローラ8a,8bの押圧力に差がある場合は、その差がローラリンク6をT形部材軸5の周りに回動させるモーメントを発生させる。これにより、ローラリンク6は、2つの当接ローラ8a,8bの押圧力が等しくなるまでT形部材軸5の周りに回転し、等しくなった位置で静止する。このように、2つの当接ローラ8a,8bからの押圧力は常に等しくなり、従来必要であったテンション付加装置を微妙に傾けて取り付ける作業は不要となる。
【0050】
次に[ステップ5]での作用について説明する。
移動手摺101を上昇方向に運転する場合は、[ステップ4]と同じになる。問題となるのは、移動手摺101を下降方向(図8では反時計回り)に運転する場合である。移動手摺101を下降方向に運転すると、駆動装置102は、駆動装置102より下にある移動手摺101に対しては引張上げる方向に力を作用させ、その部分のテンションを増加させる。また同時に、駆動装置102より上にある移動手摺101に対しては、押出す方向に力を作用させる。このため、たるみ取り部107の移動手摺101のテンションは増加する。テンション付加装置201の本体部分1が上方向に変位可能であれば、テンションの増加に対応して本体部分1が上方向に移動し、これによって生じたたるみが、駆動装置102より上方向に押出され、駆動上部案内ローラ106の付近で移動手摺101が図8の破線のように屈曲してしまう。
【0051】
しかし、テンション付加装置201の本体部分1は、前述したように、ラチェット機構可動部12とラチェット機構固定部13により上方向の変位は拘束するようになっている。このため、たるみ取り部107の移動手摺101のテンションが増加しても、テンション付加装置201の本体部分1は上方向には変位せず、移動手摺101が図8の破線のように屈曲してしまうことはない。
このように、移動手摺101を下降方向に運転しても、何の問題もなく運転を継続することができる。
【0052】
以上に述べた本発明によるテンション付加装置201を用いた調整方法は、従来必要であったボルトの取り付け、取り外しなどの煩雑な作業がなく、非常に容易なものとなる。また、従来困難であった移動手摺101へ最適なテンションを作用させることが、極めて簡単に行えるようになる。
【0053】
このように、本実施例によれば高価な装置を使用することなく、最適値に押圧力を調整することができ、調整に必要な手間と時間を大幅に低減したマンコンベア移動手摺のテンション付加装置を安価に提供することができる。
【0054】
本発明は以上説明した実施形態に限られるものではなく、種々の変形が可能である。例えば、移動手摺101に当接する当接ローラ8a,8bの上方向への移動を拘束する手段としてはラチェット機構に限らず、他の任意な手段を採用することができる。
【符号の説明】
【0055】
1…本体部分
2…垂直T形部材
3…水平部材
4…調整重り
5…T形部材軸
6…ローラリンク
7…ローラ軸
8…当接ローラ
9…穴
10…係合部
11…レール
12…ラチェット機構可動部
13…ラチェット機構固定部
14…段差部
15…バネ部
16…噛み合い部
17…固定部
18…接触部
19…つまみ
101…移動手摺
102…駆動装置
103…駆動プーリ
104…押し付けローラ
105…駆動下部案内ローラ
106…駆動上部案内ローラ
107…たるみ取り部
108…テンション付加装置
109…たるみ取り下部案内ローラ
110…たるみ取り上部案内ローラ
111…当接ローラ
112…長穴
113…ボルト
201…テンション付加装置
【技術分野】
【0001】
本発明はマンコンベア装置に関し、特に、マンコンベア移動手摺のテンション付加装置に関する。
【背景技術】
【0002】
マンコンベアに用いられている従来の移動手摺及びそのテンション付加装置について、図8と図9を用いて説明する。
【0003】
まず、その構造について説明する。図8は移動手摺駆動システム全体を示した正面図である。無端状の移動手摺101は駆動装置102に巻き掛けられ、駆動プーリ103と押し付けローラ104により挟まれている。駆動プーリ103を所定の方向に回転させることで、駆動プーリ103と移動手摺101の間の摩擦力で、移動手摺101は駆動される。
【0004】
移動手摺101の横断面はC字形状となっている。乗客が移動手摺101を持つことができるようにC字形状の開口部が下を向いて移動手摺101が走行する部分を往路側と称 している。また、移動手摺101が反転し、開口部が上を向いて移動手摺101が走行する部分を帰路側と称している。
【0005】
移動手摺101は案内レール(図示せず)に沿って駆動される。図8では、X部から図の反時計回りにY部までの往路側に、案内レールが設置されている。
【0006】
駆動装置102の前後には、駆動下部案内ローラ105と、駆動上部案内ローラ106が設置されており、移動手摺101が駆動装置102に入る際に、急角度で屈曲することなくスムーズに変形するようになっている。移動手摺101の帰路側の下部には、たるみ取り部107が設けられている。たるみ取り部107にはテンション付加装置108が設けられ、移動手摺101に図の下方向に押圧力を付加することで、移動手摺101に適切なテンションを与え、たるみを吸収するようになっている。
【0007】
たるみ取り部107の前後には、たるみ取り下部案内ローラ109と、たるみ取り上部 案内ローラ110が設置されており、移動手摺101がたるみ取り部107に入る際に、急角度で屈曲することなくスムーズに変形するようになっている。
【0008】
図9はたるみ取り部107を拡大し、従来のテンション付加装置108を示した正面図である。テンション付加装置108は移動手摺101の開口部で移動手摺101と当接する当接ローラ111a,111bを有し、この部分で移動手摺101に図の下方向に押圧力を付加している。テンション付加装置108には長穴112a,112bが設けられており、この部分にボルト113a,113bを通し、エスカレータのトラスの部材(図示せず)に固定されている。
【0009】
次に、テンション付加装置108の調整方法について説明する。調整は、以下のステップで実施される。
【0010】
[ステップ1]移動手摺101の運転を停止する。
[ステップ2]テンション付加装置108を固定しているボルト113a,113bを緩めるか取り外し、テンション付加装置108が自由に変位できるようにする。
[ステップ3]移動手摺101を上昇方向(図8では時計回り)に運転し、移動手摺101のたるみを、たるみ取り部107に集める。
[ステップ4]テンション付加装置108を下方向に押付け、当接ローラ111a,111bから移動手摺101に適切な押圧力を付加するようにする。
[ステップ5]テンション付加装置108を固定しているボルト113a,113bを締め付け、テンション付加装置108を固定する。
[ステップ6]移動手摺101の運転を再開する。
【0011】
上記の[ステップ4]で移動手摺101に付加する押圧力が大きすぎると、移動手摺101のテンションが過度に大きくなり、走行抵抗が過大になる。移動手摺101の走行抵抗が過大になると、各部の摩耗や発熱が急増したり、移動手摺101の寿命が短くなるなど、様々な問題が生じてくる。
【0012】
また、移動手摺101に付加する押圧力が小さすぎると、移動手摺101のたるみが取り切れず、移動手摺101を下降方向(図8では反時計回り)に運転した場合、駆動装置102から取り切れなかったたるみが上方に押出され、駆動上部案内ローラ106の付近で移動手摺101が図8の破線のように屈曲してしまう。このような状況で移動手摺101が走行すると、移動手摺101が案内レールの端部(図8のX部)と擦れ、激しく摩耗したり、ノッキングと呼ばれる大きな振動が移動手摺101に生じたりするなど、別の問題が生じてくる。
【0013】
押圧力は2つの当接ローラ111a,111bから移動手摺101に付加するようになっている。2つの当接ローラ111a,111bの片方だけから大きな押圧力が作用すると、その部分で移動手摺101は局部的な屈曲する可能性があり好ましくない。このため、適切に押圧力を付加するには、2つの当接ローラ111a,111bから同じ力が作用するようにテンション付加装置108を微妙に傾けて取り付ける必要もあった。
【0014】
このように、移動手摺101に付加する押圧力を適切に調整することが大切であるが、この調整には保守員の経験や勘に頼る場合が多く、最適値に押圧力を調整することができないという問題があった。
【0015】
また、上記ステップで示したように、テンション付加装置108の調整には、テンション付加装置108を微妙に傾けながらボルト113a,113bを緩めたり締め付けたりする作業が含まれ、現地の狭いスペースでこれらの作業を行うには、多くの手間と時間が必要になるという問題もあった。
【0016】
これらの問題を解決する手段として公開特許公報特開2006−8388号に、乗客コンベア移動手摺りのテンション調整装置が提案されている。これは、無端状に配置され、その折返し走行路の傾斜直線下部から水平部へと移行する屈曲部に所定の押圧力を有して押しガイドが当接する乗客コンベア移動手摺りのテンション調整を、移動手摺りの曲線部に音響検出手段を設けるとともに、移動手摺り押しガイドを移動手摺り摺動面垂直方向に押しガイド移動手段を設けたことを特徴としている。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開2006−8388号公報
【発明の概要】
【発明が解決しようとする課題】
【0018】
特許文献1に提案されている方法では、音響検出手段や押しガイド移動手段などの非常に高価な装置が必要となり、コストが大幅に増加するという大きな問題があった。本発明はこのような問題を解決するために成されたものであり、その目的は、高価な装置を使用することなく、最適値に押圧力を調整することができ、調整に必要な手間と時間を低減したマンコンベア移動手摺のテンション付加装置を安価に提供することである。
【課題を解決するための手段】
【0019】
本発明のマンコンベア移動手摺のテンション付加装置は、無端状の移動手摺の帰路側に配置され、所定の押圧力で前記移動手摺に当接し、前記移動手摺にテンションを付加する当接部と、この当接部を上下方向に案内する手段と、前記当接部を下方向への変位は許容するが上方向への変位は拘束する手段とを備えていることを特徴とするものである。
【発明の効果】
【0020】
本発明によれば、簡単な構成の装置により、押圧力を短時間に最適値に調整が可能なマンコンベア移動手摺のテンション付加装置を得ることができる。
【図面の簡単な説明】
【0021】
【図1】本発明のテンション付加装置の本体部分を示した正面図。
【図2】本発明のテンション付加装置の本体部分を示した側面図。
【図3】図1のA−A断面の平面図。
【図4】本発明のテンション付加装置を示した正面図。
【図5】図4のB−B断面の平面図。
【図6】図4のC−C断面の拡大側面図。
【図7】ラチェット機構可動部とラチェット機構固定部の動きを説明した図4のC−C断面の拡大側面図。
【図8】従来の移動手摺駆動システム全体を示した正面図。
【図9】従来のテンション付加装置を示した正面図。
【発明を実施するための形態】
【0022】
以下、本発明にかかわるマンコンベア移動手摺のテンション付加装置を図面を参照して説明する。なお、図8で説明した従来の移動手摺駆動システムと比べ、変更しているのはテンション付加装置108だけであり、その他の部分の変更はない。
【0023】
(実施例1)
まず、図1乃至図6を用いて実施例1の構成を説明する。
【0024】
本発明のマンコンベア移動手摺のテンション付加装置201の説明の前に、テンション付加装置201の主要部分である本体部分1について説明し、その後、最終形状のテンション付加装置201について説明する。
【0025】
図1、図2、図3は、本発明のマンコンベア移動手摺のテンション付加装置201の本体部分1を示したものである。図1は正面図、図2は側面図、図3は第1図のA−A断面の平面図である。
【0026】
本体部分1の中央には垂直T形部材2が配置されている。垂直T形部材2の上部には、水平部材3が正面方向に突き出すように取り付けられている。水平部材3の上部には調整重り4が取り付けられている。なお、調整重り4は、ボルトなどの適切な取り付け手段により、水平部材3への着脱が自由にできるようになっている。
【0027】
垂直T形部材2の下部には、T形部材軸5を介して、ローラリンク6の中央部が回動自在に取り付けられている。ローラリンク6の両端には、ローラ軸7a,7bを介して、当接ローラ8a,8bが回動自在に取り付けられている。
【0028】
垂直T形部材2の中央部には、後述するラチェット機構を取り付ける穴9が設けられている。また、垂直T形部材2の両端部には、後述するレールと係合する係合部10a,10bが設けられている。
【0029】
図4、図5は、前述した本体部分1に、ラチェット機構とレールを取り付けた最終形状のテンション付加装置201を示したものである。図4は正面図、図5は図4のB−B断面の平面図である。
【0030】
本体部分1の左右には、レール11a,11bが設置されている。レール11a,11bは、コ字形の断面形状になっており、その開口部が互いに向き合うように配置されている。レール11a,11bはいずれも、トラスの部材(図示せず)などに強固に固定されている。レール11a,11bの開口部には、垂直T形部材2の両端部の係合部10a,11bが係合している。このため、本体部分1はレール11a,11bに沿って案内され、上下方向に自由に移動できるようになっている。
【0031】
垂直T形部材2の中央部の穴9には、ラチェット機構可動部12が取り付けられている。垂直T形部材2の背面側には、ラチェット機構固定部13が配置されている。ラチェット機構固定部13は、トラスの部材(図示せず)などに強固に固定されている。
【0032】
なお、移動手摺101は、図の想像線(2点破線)で示される位置に配置され、当接ローラ8a,8bにより、本体部分lの重量に対応した押圧力が下方向に作用するようになっている。
【0033】
図6は図4のC−C断面を拡大した側面図である。
【0034】
ラチェット機構固定部13は、断面が鋸歯状の段差部(歯)14を複数個有している。ラチェット機構可動部12は、穴9を通りラチェット機構固定部13側に屈曲したバネ部15を有している。バネ部15の先端は鋭角的に折り返された噛み合い部16を形成し、前述の段差部14の1つと噛み合っている。
【0035】
ラチェット機構可動部12は、穴9の下側の固定部17で、溶接などの適切な手段で垂直T形部材2に強固に固定されている。穴9の上側には接触部18が設けられている。接触部18は、バネ部15の弾性変形による力で垂直T形部材2に押付けられている。
【0036】
接触部18にはつまみ19が設けられている。つまみ19を持ち、図6の右方向に引張れば、バネ部15が変形し、接触部18が垂直T形部材2から離れ、噛み合い部16と歯14との噛み合いが外れるようになっている。
【0037】
次に、実施例1の作用を説明する。
まず、図7を用いてラチェット機構可動部12とラチェット機構固定部13の作用を説明する。図7は本体部分1が下方向に変位する時の、ラチェット機構可動部12とラチェット機構固定部13の動きを説明したものである。ラチェット機構固定部13は固定されており動かないが、ラチェット機構可動部12は図7の(a)(b)(c)の順で動いていく。図7(a)は、図6と同じであるが、複数個ある鋸歯状の段差部14を区別するため、14a〜bの符号をつけて区別した。
【0038】
図7(a)の状態では、ラチェット機構固定部13の段差部14aと、ラチェット機構可動部12の噛み合い部16が噛み合っており、この状態ではラチェット機構可動部12は上方向には変位できないようになっている。ラチェット機構可動部12が下方向に変位すると、噛み合い部16は下方向に変位し、次の段差部14bに接触する。さらに変位すると、噛み合い部16は段差部14bの斜面に沿って移動する。この時、噛み合い部16は下方向に変位すると共に、図の右方向へも変位するので、ラチェット機構可動部12のバネ部15がたわみ、接触部18が垂直T形部材2から離れ、結局、噛み合い部16が段差部14bの頂点に乗り上げた図7(b)の状態になる。さらに、ラチェット機構可動部12が下方向に変位すると、噛み合い部16は段差部14bの頂点から外れ、バネ部15の弾性力で図の左方向に変位し、図7(c)のように噛み合い部16は段差部14bと噛み合うようになる。
【0039】
図7(c)の状態は図7(a)の状態と同様に、ラチェット機構可動部12は上方向には変位できないが、下方向には前述の動作を繰り返すことで変位可能になっている。以上述べたような動作をラチェット機構可動部12とラチェット機構固定部13が行うことで、本体部分lは下方向への変位は許容するが上方向の変位は拘束するようになっている。なお、以上の説明において、ラチェット機構可動部12の移動方向を上下方向と説明したが、より正確には、押圧すべき移動手摺101の面から離れる方向と押圧すべき移動手摺101の面に接近する方向を意味している。以下の説明でも同様である。
【0040】
また、接触部18に設けられたつまみ19を引張れば、噛み合い部16と段差部14との噛み合いが外れるようになっている。このため、つまみ19を引張れば、本体部分1の上方向の変位拘束を外すことができ、本体部分1は上方向にも変位できるようになる。
【0041】
次に、本発明によるテンション付加装置201を用いた調整方法について説明する。調整は、以下のステップで実施される。
【0042】
[ステップ1]移動手摺1 01の運転を停止する。
[ステップ2]必要あれば、本体部分1の調整重り4を取り付けあるいは取り換える。
[ステップ3]必要あれば、ラチェット機構可動部12のつまみ19を引張り、噛み合い部16と歯14との噛み合いが外れた状態で、本体部分1を上方向に持ち上げ、そのままそっと下ろす。
[ステップ4]移動手摺101を上昇方向(図8では時計回り)に運転し、移動手摺101のたるみを、たるみ取り部107に集める。
[ステップ5]移動手摺101の運転を再開する。
【0043】
上記の各ステップでの作用について説明する。但し、[ステップ1]は、初期据付時には移動手摺101はまだ運転していないので、このステップは省略することができる。また、保守時では、移動手摺101の運転を停止するだけである。このため、[ステップ1]での作用の説明は省略する。
【0044】
まず[ステップ2]での作用について説明する。調整重り4は、ボルトなどの適切な取り付け手段により、本体部分1の水平部材3に着脱が自由にできるようになっている。このため、据付時には所定の重量を持つ調整重り4を取り付ければ良い。また、保守時に重量の異なる調整重り4に交換する必要がある場合は交換し、交換する必要がない場合はこのステップを省略することができる。
【0045】
調整重り4の重量を変更することによって、本体部分1の重量を変更することができる。前述したように、当接ローラ8a,8bにより、本体部分1の重量に対応した押圧力が移動手摺101に作用するようになっている。このため、調整重り4の重量を調整することで移動手摺101に作用させる押圧力を変化させることができる。
【0046】
最適の押圧力は、階高や機種によって異なる。このため、階高や機種によって最適となる押圧力を事前に求めておき、それに対応した重量をもつ調整重り4を取り付ければ、最適の押圧力を移動手摺101に作用させることができる。
【0047】
次に[ステップ3]での作用について説明する。なお、初期据付時にはこのステップは省略することができる。また、保守時に[ステップ2]で重量の少ない調整重り4に交換した場合や、再調整を行う場合には、ラチェット機構可動部12のつまみ19を引張り、噛み合い部16と段差部14との噛み合いが外れた状態で、本体部分lを上方向に持ち上げ、そのままそっと下ろす。こうすることで、移動手摺101に作用する押圧力を初期化することができる。
【0048】
次に[ステップ4]での作用について説明する。
移動手摺101を上昇方向に運転すると、移動手摺101のたるみは、たるみ取り部107に集まってくる。たるみ取り部107にはテンション付加装置201が配置されている。たるみが集まるにつれ、テンション付加装置201の本体部分1は、その重量で下方向に変位し、本体部分lの重量に対応した押圧力が当接ローラ8a,8bを介して移動手摺101に作用する。押圧力と移動手摺1 01のテンションがバランスする位置に達すると、本体部分1はこれ以上下方向には変位せず、最適なテンションを移動手摺101に作用させた状態で静止する。
【0049】
2つの当接ローラ8a,8bはローラリンク6の両端に取り付けられ、ローラリンク6の中央部は垂直T形部材2の下部にT形部材軸5を介して回動自在に取り付けられている。2つの当接ローラ8a,8bの押圧力に差がある場合は、その差がローラリンク6をT形部材軸5の周りに回動させるモーメントを発生させる。これにより、ローラリンク6は、2つの当接ローラ8a,8bの押圧力が等しくなるまでT形部材軸5の周りに回転し、等しくなった位置で静止する。このように、2つの当接ローラ8a,8bからの押圧力は常に等しくなり、従来必要であったテンション付加装置を微妙に傾けて取り付ける作業は不要となる。
【0050】
次に[ステップ5]での作用について説明する。
移動手摺101を上昇方向に運転する場合は、[ステップ4]と同じになる。問題となるのは、移動手摺101を下降方向(図8では反時計回り)に運転する場合である。移動手摺101を下降方向に運転すると、駆動装置102は、駆動装置102より下にある移動手摺101に対しては引張上げる方向に力を作用させ、その部分のテンションを増加させる。また同時に、駆動装置102より上にある移動手摺101に対しては、押出す方向に力を作用させる。このため、たるみ取り部107の移動手摺101のテンションは増加する。テンション付加装置201の本体部分1が上方向に変位可能であれば、テンションの増加に対応して本体部分1が上方向に移動し、これによって生じたたるみが、駆動装置102より上方向に押出され、駆動上部案内ローラ106の付近で移動手摺101が図8の破線のように屈曲してしまう。
【0051】
しかし、テンション付加装置201の本体部分1は、前述したように、ラチェット機構可動部12とラチェット機構固定部13により上方向の変位は拘束するようになっている。このため、たるみ取り部107の移動手摺101のテンションが増加しても、テンション付加装置201の本体部分1は上方向には変位せず、移動手摺101が図8の破線のように屈曲してしまうことはない。
このように、移動手摺101を下降方向に運転しても、何の問題もなく運転を継続することができる。
【0052】
以上に述べた本発明によるテンション付加装置201を用いた調整方法は、従来必要であったボルトの取り付け、取り外しなどの煩雑な作業がなく、非常に容易なものとなる。また、従来困難であった移動手摺101へ最適なテンションを作用させることが、極めて簡単に行えるようになる。
【0053】
このように、本実施例によれば高価な装置を使用することなく、最適値に押圧力を調整することができ、調整に必要な手間と時間を大幅に低減したマンコンベア移動手摺のテンション付加装置を安価に提供することができる。
【0054】
本発明は以上説明した実施形態に限られるものではなく、種々の変形が可能である。例えば、移動手摺101に当接する当接ローラ8a,8bの上方向への移動を拘束する手段としてはラチェット機構に限らず、他の任意な手段を採用することができる。
【符号の説明】
【0055】
1…本体部分
2…垂直T形部材
3…水平部材
4…調整重り
5…T形部材軸
6…ローラリンク
7…ローラ軸
8…当接ローラ
9…穴
10…係合部
11…レール
12…ラチェット機構可動部
13…ラチェット機構固定部
14…段差部
15…バネ部
16…噛み合い部
17…固定部
18…接触部
19…つまみ
101…移動手摺
102…駆動装置
103…駆動プーリ
104…押し付けローラ
105…駆動下部案内ローラ
106…駆動上部案内ローラ
107…たるみ取り部
108…テンション付加装置
109…たるみ取り下部案内ローラ
110…たるみ取り上部案内ローラ
111…当接ローラ
112…長穴
113…ボルト
201…テンション付加装置
【特許請求の範囲】
【請求項1】
無端状の移動手摺の帰路側に配置され、所定の押圧力で前記移動手摺に当接し、前記移動手摺にテンションを付加する当接部と、この当接部を上下方向に案内する手段と、前記当接部を下方向への変位は許容するが上方向への変位は拘束する手段とを備えていることを特徴とするマンコンベア移動手摺のテンション付加装置。
【請求項2】
前記拘束手段は、ラチェット機構で構成されていることを特徴とする請求項1記載のマンコンベア移動手摺のテンション付加装置。
【請求項3】
前記ラチェット機構は、鋸歯状の段差を有する固定部と、この段差に弾性的係合する可動部を有し、この可動部は、前記当接部が前記移動手摺に対して離間方向に力を受ける場合は前記段差に係合して離間方向への変位が拘束され、前記当接部が前記移動手摺に対して接近方向に力を受ける場合は前記段差との係合が外れ変位を許容するように構成されていることを特徴とする請求項2記載のマンコンベア移動手摺のテンション付加装置。
【請求項4】
前記可動部は、前記離間方向の変位の拘束を解除する手段をさらに備えたことを特徴とする請求項3記載のマンコンベア移動手摺のテンション付加装置。
【請求項5】
前記当接部は、手摺ベルトに作用させる押圧力を調整できる手段をさらに備えていることを特徴する、請求項1記載のマンコンベア移動手摺のテンション付加装置。
【請求項6】
前記手摺ベルトに作用させる押圧力を調整できる手段は、前記当接部本体に搭載された重りであり、この重りの重量を変更することで手摺ベルトに作用させる押圧力を調整できるようにしたことを特徴とする請求項5記載のマンコンベア移動手摺のテンション付加装置。
【請求項7】
前記当接部は、リンク部材に回転自在に設けられた複数個のローラであり、前記リンク部材は前記当接部本体に回動自在に取り付けられていることを特徴とする請求項1記載のマンコンベア移動手摺のテンション付加装置。
【請求項1】
無端状の移動手摺の帰路側に配置され、所定の押圧力で前記移動手摺に当接し、前記移動手摺にテンションを付加する当接部と、この当接部を上下方向に案内する手段と、前記当接部を下方向への変位は許容するが上方向への変位は拘束する手段とを備えていることを特徴とするマンコンベア移動手摺のテンション付加装置。
【請求項2】
前記拘束手段は、ラチェット機構で構成されていることを特徴とする請求項1記載のマンコンベア移動手摺のテンション付加装置。
【請求項3】
前記ラチェット機構は、鋸歯状の段差を有する固定部と、この段差に弾性的係合する可動部を有し、この可動部は、前記当接部が前記移動手摺に対して離間方向に力を受ける場合は前記段差に係合して離間方向への変位が拘束され、前記当接部が前記移動手摺に対して接近方向に力を受ける場合は前記段差との係合が外れ変位を許容するように構成されていることを特徴とする請求項2記載のマンコンベア移動手摺のテンション付加装置。
【請求項4】
前記可動部は、前記離間方向の変位の拘束を解除する手段をさらに備えたことを特徴とする請求項3記載のマンコンベア移動手摺のテンション付加装置。
【請求項5】
前記当接部は、手摺ベルトに作用させる押圧力を調整できる手段をさらに備えていることを特徴する、請求項1記載のマンコンベア移動手摺のテンション付加装置。
【請求項6】
前記手摺ベルトに作用させる押圧力を調整できる手段は、前記当接部本体に搭載された重りであり、この重りの重量を変更することで手摺ベルトに作用させる押圧力を調整できるようにしたことを特徴とする請求項5記載のマンコンベア移動手摺のテンション付加装置。
【請求項7】
前記当接部は、リンク部材に回転自在に設けられた複数個のローラであり、前記リンク部材は前記当接部本体に回動自在に取り付けられていることを特徴とする請求項1記載のマンコンベア移動手摺のテンション付加装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−1490(P2013−1490A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−133214(P2011−133214)
【出願日】平成23年6月15日(2011.6.15)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月15日(2011.6.15)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
[ Back to top ]