
マーカ、マーカ検出方法および装置

【課題】対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供する。
【解決手段】対象物1の表面に取り付けたマーカ10であって、乱反射材からなる内層12と、内層の外側に取り付けられた偏光フィルムからなる外層14とを有し、外光2を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射する。
【解決手段】対象物1の表面に取り付けたマーカ10であって、乱反射材からなる内層12と、内層の外側に取り付けられた偏光フィルムからなる外層14とを有し、外光2を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像中の対象物を少ない画素で検出するマーカ、マーカ検出方法および装置に関する。
【背景技術】
【0002】
自動制御される複数のロボットが屋外において分担作業するような場合などにおいて、各ロボットは互いの位置関係を知る必要がある。
【0003】
特に農作業や地雷除去などのように屋外の広範囲なエリアを複数のロボットが作業分担する場合や、鉱山や災害現場の瓦礫除去で荷物を運ぶために複数のロボットが縦横に走り回る場合などには、各ロボットは他のロボットを高い精度で検出する必要がある。
【0004】
このような場合に、従来からマーカが用いられている。同じ作業環境下にある他の物体と確実に区別できるマーカを各ロボットに取り付け、このマーカを検出することにより、マーカの位置、すなわち相手のロボットの位置を検出することができる。
【0005】
また、AGV(Automated Guided Vehicle)などの自動搬送ロボットは、従来は、予め設置した磁気テープに沿ったコース上しか移動できなかった。
しかし、マーカを人に取り付け、そのマーカを自動搬送ロボットが追従することにより、或いは、人を追従しているロボットのマーカを、別のロボットが追従することにより、人が自分で運ぶ荷物以外に、重い荷物を多数搬送することができる。
このような場合にも、マーカは有益であり、人がマーカを持つ、或いは人の着衣にマーカを貼り付けることで、ロボットが追跡すべき対象を1つ、もしくは、限られた数に限定することができる。
さらに特許文献1によると、複数のロボットが、交互に動きながら、お互いの位置を計測することで、誤差が発生しやすい位置計測についても高い精度で計測できるようにするものである。マーカをロボットに取り付け、ロボットが互いの方向を検出し計測できれば、高精度の位置計測が可能になる。
【0006】
上述した目的を達成するために、種々の方式のマーカやマーカ検出手段が既に提案されている(例えば特許文献1〜4)。
【0007】
特許文献1は、マーカとマーカ検出手段として、ロボットの発光する光と、この光を角度選択性のある光検出機構を例示している。
【0008】
特許文献2は、マーカとしてLEDを取り付け、特定のタイミングでの点滅や、明るさを特定のパターンで時間変化させ、検出装置は周囲を撮影し、画像中の画素毎に明るさの変化を検出し、時間的な明るさ変化のうち、マーカ特有の明るさ変化(タイミング的なもの、時間的・周期的なパターン)のみを見つけ出す処理を行い、見つかった部分をマーカとして検出するものである。
【0009】
特許文献3は、特定の幾何学模様(直線、四角形、円弧など)を描いたマーカを用い、検出装置は周囲の映像を撮影し、映像の中からマーカ特有の幾何学特徴を抽出する画像処理を行ってマーカのみを見つけ出すものである。
【0010】
特許文献4は、マーカを部分部分に分け、その小領域の中で特徴的な部分をいくつか抜き出し、その特徴的な部分を部分毎に画像処理により照合することで、マーカの一部が隠れていても、或いは、ある程度似た模様が背景にあっても高い精度でマーカを検出するものである。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開平6−314124号公報、「自立走行ロボット群システム」
【特許文献2】特開2009−33366号公報、「光学マーカシステム」
【特許文献3】特開2007−3233号公報、「コードターゲット、コード検出システム、及び3次元情報取得システム」
【特許文献4】特開2011−28417号公報、「マーカ検出装置、マーカ生成検出システム、マーカ生成検出装置、マーカ検出方法及びマーカ検出プログラム」
【発明の概要】
【発明が解決しようとする課題】
【0012】
屋外の一般環境(工事現場、農場、森林など)で使用する実用的なロボットを想定した場合に、マーカの周囲には、多種多様な模様が背景として撮影される。また、光源についても太陽光を想定すると、人工的な光源に比べ非常に明るい光源がその位置を様々に変化させる特徴がある。また、このような一般環境用の機械はそもそも広いフィールドでの運用が望まれていることを考えると、互いに遠い距離(数十cmのマーカを、百m以上の距離で見つける)で検出できる必要がある。
ところが、ある程度広い視野(60度)を確保しようとする場合には、百万画素を有するカメラを用いても、50cmのマーカを100m地点から撮影した場合に一辺5画素程度にしか映らない。もちろん、さらに遠くなるとさらに小さくしか映らないので、実質上は数画素程度でマーカを判別できる必要がある。
【0013】
特許文献1,2のマーカ及びマーカ検出手段の場合、太陽光の影響が大きく、周囲が直接太陽光で照らされる場合にはLEDよりも太陽光に照らされた周囲が明るいため、LEDと周りとの区別がつかなくなり、画像中で検出できなくなるという問題がある。
【0014】
特許文献3のマーカ及びマーカ検出手段では、マーカが単純な幾何学模様の場合には、背景にいろいろな模様があるため、背景の一部が間違ってマーカとして抽出されてしまう。
また、模様の形が画像処理可能であるためにはマーカは一辺が十数画素程度のサイズに映るようにしなくてはならない。ところが、遠くのマーカはそれより小さくしか映らない。
一方、小さく見える対象をズームレンズで撮影することも考えられるが、この場合、非常に狭い視野となり、ロボットの運動により簡単に視野から外れたり、カメラの向きを制御する場合でも非常に緻密な方向制御を行わないかぎりマーカを見つけられなくなるという問題がある。
【0015】
特許文献4のマーカ及びマーカ検出手段では、背景模様を間違って検出することは少なくなるが、模様の一部だけで画像処理を行うため、その一部が画像処理できる一辺が十画素近い大きさで、つまり全体としては一辺が数十画素で撮影される必要がある。このため、小さく見えるマーカを検出する手段としては適していない。
【0016】
また、特定の色をマーカとして用いること考えられる。しかし、この場合も一般的な環境(工事現場や農場・森林)などには様々な色のものが設置されるため、マーカと似た色が存在する場合に誤って検出されるおそれがある。
【0017】
本発明は、上述した問題点を解決するために創案されたものである。すなわち、本発明の目的は、対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下(一辺3画素程度)の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供することにある。
【課題を解決するための手段】
【0018】
本発明によれば、対象物の表面に取り付けたマーカであって、
乱反射材からなる内層と、内層の外側に取り付けられた偏光フィルムからなる外層とを有し、
外光を乱反射し、地表に対し水平、垂直、又は斜めの偏光に変換して放射する、ことを特徴とするマーカが提供される。
【0019】
また本発明によれば、偏光除去手段により、上記のマーカから放射された偏光を除去し、
第1受光素子により、前記偏光を除去した入射光によりマーカを含む領域の第1画像を撮影し、
第2受光素子により、前記偏光を除去しない入射光により前記領域の第2画像を撮影し、
演算装置により、第1画像及び第2画像の対応する画素の光の強度比から、マーカの位置を検出する、ことを特徴とするマーカ検出方法が提供される。
【0020】
さらに本発明によれば、上記のマーカから放射された偏光を除去する偏光除去手段と、
前記偏光を除去した入射光によりマーカを含む領域の第1画像を撮影する第1受光素子と、
前記偏光を除去しない入射光により前記領域の第2画像を撮影する第2受光素子と、
第1画像及び第2画像の対応する画素の光の強度比から、マーカの位置を検出する演算装置と、を備えることを特徴とするマーカ検出装置が提供される。
【発明の効果】
【0021】
対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、上記本発明のマーカは、外光を乱反射し、地表に対し水平、垂直、又は斜めの偏光に変換して放射するので、マーカから放射された偏光からマーカを特定して誤認することなく検出することができる。
【0022】
この場合、マーカ全体が同じ波長特性と光学特性を持ち均一な対象の計測となるため、理論的には1画素、現実的には一辺が数画素あればその特徴を見つけ出すことが出来る。そのため、画像中の対象物を10画素以下(一辺3画素程度)の少ない画素から、誤認することなく検出することができ、遠くのマーカを広い視野の計測装置で見つけることができる。
【0023】
また、自然界ではほとんど発生しない光学特性なので、誤検出することがない。
従って、外光を反射するときに、光源の位置や強さに依存しにくい光学特性変化を行っているため、外光の位置や強さの変化に対しても安定してマーカを見つけ出すことができる。
【図面の簡単な説明】
【0024】
【図1】本発明によるマーカを備えたロボットの模式図である。
【図2】本発明によるマーカの構造図である。
【図3】マーカの原理図である。
【図4】本発明によるマーカ検出装置の第1実施形態図である。
【図5】本発明によるマーカ検出装置の第2実施形態図である。
【図6】本発明によるマーカ検出装置の第3実施形態図である。
【発明を実施するための形態】
【0025】
以下、本発明の好ましい実施形態を添付図面に基づいて詳細に説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0026】
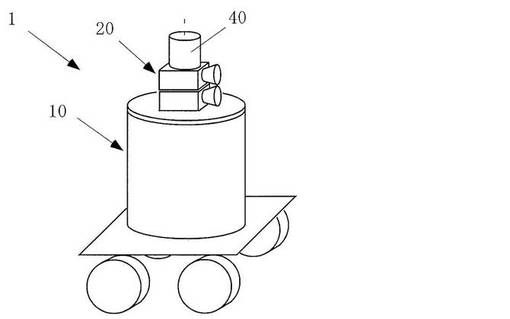
図1は、本発明によるマーカを備えたロボットの模式図である。
この図において、1は対象物であり、この例では自走ロボットである。なお、対象物1は、自律移動ロボットや自動搬送ロボットであってもよく、ロボット以外であってもよい。
【0027】
本発明のマーカ10は、この例では自走ロボット1(対象物)の外面に取り付けられた円筒形部材である。なお、マーカ10は、この形状に限定されず、平板でもその他の形状であってもよい。
【0028】
本発明のマーカ検出装置20は、この例では自走ロボット1(対象物)に取り付けられ、水平方向に旋回してその回りに位置する他の自走ロボット1(対象物)を検出するようになっている。なお、マーカ検出装置20を自走ロボット1(対象物)に取り付けずに、その他の位置(例えば固定部分)や追跡対象の人間に取り付けてもよい。
【0029】
またこの図において、測距用のレーザレーダ40が自走ロボット1(対象物)に設けられ、その回りに位置する他の自走ロボット1(対象物)までの距離を検出するようになっている。なお、レーザレーダ40は必須ではなく、これを省略してもよい。
【0030】
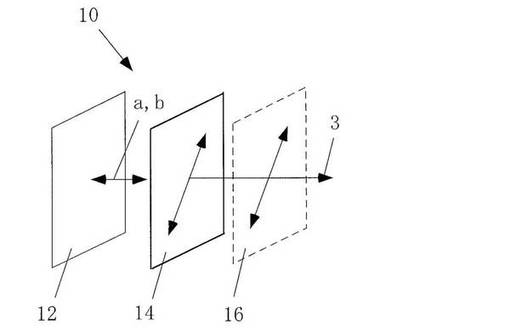
図2は、本発明によるマーカの構造図であり、一部を分離して示している。
この図において、本発明のマーカ10は、対象物1の表面に取り付けられた内層12、外層14、及び表面層16を有する。
内層12は乱反射材からなる。外層14は内層12の外側に取り付けられた偏光フィルムからなる。さらに表面層16は、反射防止膜からなる。
この構成により、マーカ10は、外光2を内層12で乱反射し、かつ外層14で地表に対し水平、垂直、又は斜めの偏光3に変換して放射するようになっている。外光2は、太陽光又は屋外光である。
【0031】
マーカ10は、ロボットなどの検出したい対象物1の外板に沿って以下のフィルムを貼る、もしくは、布や板の上に以下のフィルムを貼ったものである。
フィルムは内層12と外層14の2層構造になっており、内層12は高い反射率を持った乱反射材であり、PET(ポリエチレンテレフタラート)を発泡させたものや、厚手の紙を多層に貼り合わせたものが適している。内層12は、見た目は明るくて光沢の無い白色である。
外層14は、水平方向、垂直方向、又は斜め方向の偏光フィルムである。水たまりが想定される場合には垂直方向の偏光フィルムを用い、ガラス窓が想定される場合には水平方向の偏光フィルムをマーカに用いるのがよい。影響の大きい方を重視するが、両方の存在がある場合には垂直方向、又は斜め方向の偏光フィルムとし、低い位置にマーカを設置するなど、窓ガラスが視界内に入りにくい工夫を行う。
さらに外側(表面層16)に反射防止膜として反射を防止するコーティングを実施するか、反射防止フィルムを貼り付けることが望ましい。
【0032】
図3は、マーカ10の原理図である。
この図では、説明の都合上、マーカ10の内層12、外層14、及び表面層16を平面で示している。外層14は、水平方向、垂直方向、又は斜め方向の偏光フィルムである。
【0033】
図3のマーカ10に外光(太陽光、屋外光)が当たると、偏光フィルムからなる外層14により、偏光フィルムと同じ偏光の光aが通過する。通過した光aが乱反射フィルムからなる内層12にあたり、内層12の表側で全方向に乱反射する。乱反射した光bは無偏光になるが、さらに偏光フィルムからなる外層14を通過することにより地表に対し水平、垂直、又は斜めの偏光3に変換され偏光3だけがマーカ10から放射される。
【0034】
図4は、本発明によるマーカ検出装置の第1実施形態図である。
この図において、本発明のマーカ検出装置20は、偏光除去手段、第1カメラ22、偏光フィルタ23、第2カメラ24、位置補正装置26、及び演算装置28を備える。
【0035】
偏光除去手段は、この例では偏光フィルタ21である。
偏光フィルタ21は、マーカ10から放射された偏光3を除去し、マーカ10を含む領域からのその他の光を通すようになっている。すなわち偏光フィルタ21は、マーカ10から放射された水平、垂直、又は斜めの偏光3と直交する方向の偏光フィルタであり、マーカ10で反射した偏光3をカットするようになっている。
【0036】
第1カメラ22は、レンズ22b及び第1受光素子22cを有する。レンズ22bは撮影レンズであり、偏光フィルタ21を透過した入射光によりマーカ10を含む領域の第1画像10aを第1受光素子22cに結像する。第1受光素子22cは、CCD又はC−MOSである。
この構成により、第1カメラ22は、マーカ10から放射された偏光3を除去した入射光4によりマーカ10を含む領域の第1画像10aを撮影するようになっている。
【0037】
偏光フィルタ23は、この例ではマーカ10から放射された偏光3と同じ向きの偏光フィルタであり、マーカ10で反射した偏光3をそのまま通すようになっている。
【0038】
第2カメラ24は、レンズ24b、及び第2受光素子24cを有する。
レンズ24bは撮影レンズであり、フィルタ24aを透過した入射光によりマーカ10を含む領域の第2画像10bを第2受光素子24cに結像する。第2受光素子24cは、第1受光素子22cと同様のCCD又はC−MOSである。
この構成により、第2カメラ24は、マーカ10から放射された偏光3を除去しない入射光により第1画像10aと同じ領域の第2画像10bを撮影するようになっている。
【0039】
なおこの例において、偏光フィルタ23は必須ではなく、これを省略することができる。
【0040】
上述した第1画像10aと第2画像10bは、マーカ10を含む領域の画像である点で共通するが、各画像を形成するための入射光にマーカ10から放射された偏光3を含むか否かで相違する。
【0041】
位置補正装置26は、第1画像10aと第2画像10bの画素位置を対応させる。
図4の構成において、第1カメラ22と第2カメラ24は、近接して配置されているが、対象物1を一定の離れた位置から撮影するため、必然的に視差が生じる。
位置補正装置26は、この視差を補償し、同一の対象物1に対応する画素位置を第1画像10aと第2画像10bで対応付けできるようにする。
【0042】
演算装置28は、第1画像10a及び第2画像10bの対応する画素の光の強度比から、マーカ10の位置を検出する。この検出方法は後述する。
【0043】
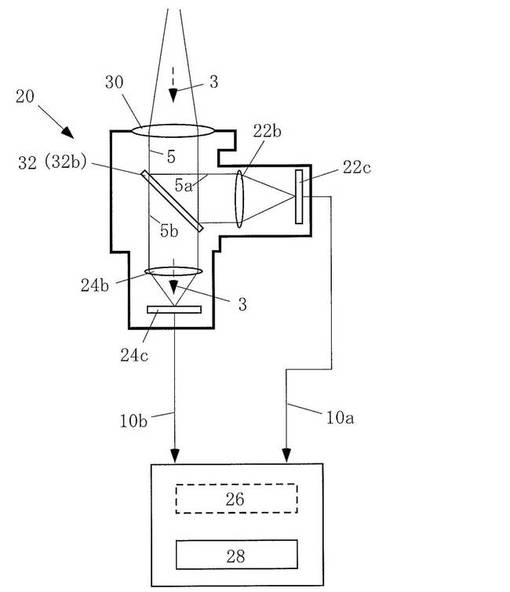
図5は、本発明によるマーカ検出装置の第2実施形態図である。
この図において、本発明のマーカ検出装置20は、さらに、レンズ30と分割ミラー32を備える。レンズ30は、対象物1からの入射光(偏光3を含む)を光5に変換する。光5は例えば平行光である。
【0044】
分割ミラー32は、レンズ30を通過した光5を90度方向に反射する反射光5aと、光5をそのまま通過する透過光5bと、に分割するハーフミラー32aである。
その他の構成は、第1実施形態と同様である。
【0045】
上述した第1受光素子22cは、第1実施形態と同様にマーカ10から放射された偏光3を除去した入射光4によりマーカ10を含む領域の第1画像10aを撮影するようになっている。
【0046】
また、第2受光素子24cは、マーカ10から放射された偏光3を除去しない入射光により第1画像10aと同じ領域の第2画像10bを撮影するようになっている。
従って、第1画像10aと第2画像10bは、マーカ10を含む領域の画像である点で共通するが、各画像を形成するための入射光にマーカ10から放射された偏光3を含むか否かで相違する。
【0047】
位置補正装置26は、第1画像10aと第2画像10bの画素位置を対応させる。
図5の構成において、第1カメラ22と第2カメラ24は、対象物1からの同一の光を分割して撮影するため、図4のような視差は生じない。
しかし、第1画像10aと第2画像10bの画素位置が正確には一致していない場合には、位置補正装置26は、同様に同一の対象物1に対応する画素位置を第1画像10aと第2画像10bで対応付けできるようにする。一方、受光素子22c、24cを正確に設置して位置が一致できている場合には位置補正装置26を省略することもできる。
【0048】
演算装置28は、第1画像10a及び第2画像10bの対応する画素のマーカ10で反射した偏光3の強度から、マーカ10の位置を検出する。
【0049】
図6は、本発明によるマーカ検出装置の第3実施形態図である。
この例で分割ミラー32は、ワイヤーグリッドアレイミラー(又は偏光特性のあるビームスプリッタ)32bであり、偏光除去手段に相当する。
ワイヤーグリッドアレイミラー(又は偏光特性のあるビームスプリッタ)32bは、特定の偏光成分をそのまま通過する透過光5bと、その他を90度方向に反射する反射光5aとに分割する。この場合、透過光5bにマーカ10から放射された偏光3を含まないように設定するのがよい。
ワイヤーグリッドアレイミラー(又は偏光特性のあるビームスプリッタ)32bを用いる場合には、第2実施形態の偏光フィルタ21,23は必須ではなく、これを省略することができる。
【0050】
上述したマーカ10とマーカ検出装置20を用い、本発明によるマーカ10の検出は以下の方法による。
(A)偏光フィルタ21により、マーカ10から放射された偏光3を除去する。
(B)第1受光素子22cにより偏光3を除去した入射光によりマーカ10を含む領域の第1画像10aを撮影する。
(C)第2受光素子24cにより、偏光3を除去しない入射光により同じ領域の第2画像10bを撮影する。
(D)位置補正装置26により、第1画像10aと第2画像10bの画素位置を対応させる。
(E)演算装置28により、第1画像10a及び第2画像10bの対応する画素の光の強度比(明るさの比率)から、マーカ10の位置を検出する
【0051】
上記(E)では、演算装置28により、対応する画素における第1画像10a上の光の強度I1と第2画像10b上の光の強度I2の強度比I1/I2を演算し、強度比I1/I2が閾値を下回った画素位置をマーカ10の位置として検出する。この閾値は、1/2〜1/4が好ましく、後述の例では1/4である。
【0052】
第1画像10aの入射光は、マーカ10から放射された偏光3を含まないため、第2画像10bと比較して一般的に暗い画像となり、検出精度が低下する可能性がある。
この場合、補正値Kを予め設定し、第1画像10aの強度を補正値Kだけ増幅することが好ましい。
【0053】
例えば、同一の白色光に対する第1画像10a上の強度I3と第2画像10b上の強度I4から補正値K×強度比I3/I4が1になる補正値Kを予め設定し、第1画像10aの強度I1を補正値Kだけ増幅した強度比I1’/I2が上述の閾値×補正値Kを下回った画素位置をマーカ10の位置として検出する。
このように、補正値Kを予め設定し、検出レベルの低い第1画像10a上の強度I1をK倍に増幅しておくことにより、検出レベルを高め、検出精度を高めることができる。
【0054】
上述したように、図4、図5におけるマーカ検出装置20は、2つの受光素子22c、24cのマトリクス(CCDもしくはC−MOS)を持ち、2つの画像(第1画像10aと第2画像10b)を同時に撮影する。
第1画像10aと第2画像10bの画像データは、演算装置28に伝送され、演算装置28内では以下の2つの計算を実施する。
【0055】
光学系や2つの受光素子22c、24cのカメラ22、24内の設置位置のずれにより、撮影対象(対象物1やマーカ10)は、2つの受光素子22c、24cの全く同じ位置に映るわけではなく、微少なズレ(平行移動とスケール)が発生する。そのため、予めこのズレを計測して校正値を準備し、その校正値により2つの画像データが正しく重なるようなズレ補正を位置補正装置26により行う。
【0056】
各画素が同じ所を撮影している2枚の画像(第1画像10aと第2画像10b)で、同じ画素同士で明るさ(強度)の比を取る。
この明るさの比が一定の閾値を下回った部分をマーカ10として検出する。
【0057】
固定の補正値Kは事前に校正パラメータとして計測を行う。無偏光のものを撮影したときに上記式の比率が1になるように、実験値から求める。
この比(K×前述の比率)が充分小さな値、例えば1/4以下となる画素を検出する。よって明るさ(強度)の比から直接判定する場合の閾値はK×1/4となる。
【0058】
以下、本発明によるマーカ検出動作を説明する。
マーカ10によって放射された地表に対し水平、垂直、又は斜めに偏光した偏光3は、それと直交する偏光フィルタ21では遮断され、無フィルタもしくは同じ方向のフィルタであるフィルタ24aは通過する。そのため、偏光フィルタ21側の第1受光素子22cではマーカ10の明るさ(強度)はきわめて低く、もう一方の第2受光素子24cではマーカ10は本来の見えている明るさ(強度)で撮影される。
【0059】
撮影したマーカ10を含む画像(第1画像10a及び第2画像10b)に位置補正装置26により位置補正を行い、2つの画像(第1画像10a及び第2画像10b)の間で同じ場所を撮影した画素のデータが同じ位置にくるようにデータを修正する。
その後、各場所の画素で明るさを比較し、比が例えば1/4以下の部分を抽出する画像処理を実施する。理論上では偏光フィルタ21側の第1受光素子22cの明るさは0に近いので、明るさの比もきわめて小さい(0に近い)値となる。また、抽出結果には、ごま塩状のノイズなどが乗っている場合があるので、孤立点除去(塊のサイズが小さければ除去)などのノイズ除去を行った後、まとまって検出が得られている領域の位置を検出位置として出力する。
充分な明るさ(強度)の比と面積が無い場合には検出出来なかったことを出力する。
【0060】
なお地表に対し水平、垂直、又は斜めの偏光3は、自然界ではあまり発生しない光学特性なので、以下の特殊な状況を除いて誤検出することがない。
水たまりの反射はほとんど水平成分として反射され垂直偏光が小さくなる。
窓などのガラス面での反射はほとんど垂直成分として反射され水平偏光が小さくなる。
従って、マーカ10は、使用する環境により水平、垂直、又は斜めの偏光のいずれを放射(反射)するかを決定するのがよい。
【0061】
上述した本発明によれば、対象物1が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、本発明のマーカ10は、外光を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射するので、マーカ10から放射された偏光3からマーカ10を特定して誤認することなく検出することができる。
【0062】
この場合、マーカ全体が同じ波長特性と光学特性を持ち均一な対象の計測となるため、理論的には1画素、現実的には一辺が数画素あればその特徴を見つけ出すことが出来る。そのため、画像中の対象物1を10画素以下(一辺3画素程度)の少ない画素から、誤認することなく検出することができ、遠くのマーカを広い視野の計測装置で見つけることができる。
【0063】
従って、外光を反射するときに、光源の位置や強さに依存しにくい光学特性変化を行っているため、外光の位置や強さの変化に対しても安定してマーカ10を見つけ出すことができる。
【0064】
なお、本発明は上述した実施形態に限定されず、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味および範囲内でのすべての変更を含むものである。
【符号の説明】
【0065】
1 対象物(ロボット)、2 外光、
3 偏光、4 偏光3を除去した光、
5 光、5a 反射光、5b 透過光、
10 マーカ、10a 第1画像、10b 第2画像、
12 内層(乱反射材)、14 外層(偏光フィルム)、
16 表面層(反射防止膜)、
20 マーカ検出装置、21 偏光フィルタ、
22 第1カメラ、22b レンズ、
22c 第1受光素子(CCD又はC−MOS)、
23 偏光フィルタ、24 第2カメラ、
24b レンズ、24c 第2受光素子(CCD又はC−MOS)、
26 位置補正装置、28 演算装置、
30 レンズ、32 分割ミラー、
32a ハーフミラー、
32b ワイヤーグリッドアレイミラー(又は偏光特性のあるビームスプリッタ)、
40 レーザレーダ
【技術分野】
【0001】
本発明は、画像中の対象物を少ない画素で検出するマーカ、マーカ検出方法および装置に関する。
【背景技術】
【0002】
自動制御される複数のロボットが屋外において分担作業するような場合などにおいて、各ロボットは互いの位置関係を知る必要がある。
【0003】
特に農作業や地雷除去などのように屋外の広範囲なエリアを複数のロボットが作業分担する場合や、鉱山や災害現場の瓦礫除去で荷物を運ぶために複数のロボットが縦横に走り回る場合などには、各ロボットは他のロボットを高い精度で検出する必要がある。
【0004】
このような場合に、従来からマーカが用いられている。同じ作業環境下にある他の物体と確実に区別できるマーカを各ロボットに取り付け、このマーカを検出することにより、マーカの位置、すなわち相手のロボットの位置を検出することができる。
【0005】
また、AGV(Automated Guided Vehicle)などの自動搬送ロボットは、従来は、予め設置した磁気テープに沿ったコース上しか移動できなかった。
しかし、マーカを人に取り付け、そのマーカを自動搬送ロボットが追従することにより、或いは、人を追従しているロボットのマーカを、別のロボットが追従することにより、人が自分で運ぶ荷物以外に、重い荷物を多数搬送することができる。
このような場合にも、マーカは有益であり、人がマーカを持つ、或いは人の着衣にマーカを貼り付けることで、ロボットが追跡すべき対象を1つ、もしくは、限られた数に限定することができる。
さらに特許文献1によると、複数のロボットが、交互に動きながら、お互いの位置を計測することで、誤差が発生しやすい位置計測についても高い精度で計測できるようにするものである。マーカをロボットに取り付け、ロボットが互いの方向を検出し計測できれば、高精度の位置計測が可能になる。
【0006】
上述した目的を達成するために、種々の方式のマーカやマーカ検出手段が既に提案されている(例えば特許文献1〜4)。
【0007】
特許文献1は、マーカとマーカ検出手段として、ロボットの発光する光と、この光を角度選択性のある光検出機構を例示している。
【0008】
特許文献2は、マーカとしてLEDを取り付け、特定のタイミングでの点滅や、明るさを特定のパターンで時間変化させ、検出装置は周囲を撮影し、画像中の画素毎に明るさの変化を検出し、時間的な明るさ変化のうち、マーカ特有の明るさ変化(タイミング的なもの、時間的・周期的なパターン)のみを見つけ出す処理を行い、見つかった部分をマーカとして検出するものである。
【0009】
特許文献3は、特定の幾何学模様(直線、四角形、円弧など)を描いたマーカを用い、検出装置は周囲の映像を撮影し、映像の中からマーカ特有の幾何学特徴を抽出する画像処理を行ってマーカのみを見つけ出すものである。
【0010】
特許文献4は、マーカを部分部分に分け、その小領域の中で特徴的な部分をいくつか抜き出し、その特徴的な部分を部分毎に画像処理により照合することで、マーカの一部が隠れていても、或いは、ある程度似た模様が背景にあっても高い精度でマーカを検出するものである。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開平6−314124号公報、「自立走行ロボット群システム」
【特許文献2】特開2009−33366号公報、「光学マーカシステム」
【特許文献3】特開2007−3233号公報、「コードターゲット、コード検出システム、及び3次元情報取得システム」
【特許文献4】特開2011−28417号公報、「マーカ検出装置、マーカ生成検出システム、マーカ生成検出装置、マーカ検出方法及びマーカ検出プログラム」
【発明の概要】
【発明が解決しようとする課題】
【0012】
屋外の一般環境(工事現場、農場、森林など)で使用する実用的なロボットを想定した場合に、マーカの周囲には、多種多様な模様が背景として撮影される。また、光源についても太陽光を想定すると、人工的な光源に比べ非常に明るい光源がその位置を様々に変化させる特徴がある。また、このような一般環境用の機械はそもそも広いフィールドでの運用が望まれていることを考えると、互いに遠い距離(数十cmのマーカを、百m以上の距離で見つける)で検出できる必要がある。
ところが、ある程度広い視野(60度)を確保しようとする場合には、百万画素を有するカメラを用いても、50cmのマーカを100m地点から撮影した場合に一辺5画素程度にしか映らない。もちろん、さらに遠くなるとさらに小さくしか映らないので、実質上は数画素程度でマーカを判別できる必要がある。
【0013】
特許文献1,2のマーカ及びマーカ検出手段の場合、太陽光の影響が大きく、周囲が直接太陽光で照らされる場合にはLEDよりも太陽光に照らされた周囲が明るいため、LEDと周りとの区別がつかなくなり、画像中で検出できなくなるという問題がある。
【0014】
特許文献3のマーカ及びマーカ検出手段では、マーカが単純な幾何学模様の場合には、背景にいろいろな模様があるため、背景の一部が間違ってマーカとして抽出されてしまう。
また、模様の形が画像処理可能であるためにはマーカは一辺が十数画素程度のサイズに映るようにしなくてはならない。ところが、遠くのマーカはそれより小さくしか映らない。
一方、小さく見える対象をズームレンズで撮影することも考えられるが、この場合、非常に狭い視野となり、ロボットの運動により簡単に視野から外れたり、カメラの向きを制御する場合でも非常に緻密な方向制御を行わないかぎりマーカを見つけられなくなるという問題がある。
【0015】
特許文献4のマーカ及びマーカ検出手段では、背景模様を間違って検出することは少なくなるが、模様の一部だけで画像処理を行うため、その一部が画像処理できる一辺が十画素近い大きさで、つまり全体としては一辺が数十画素で撮影される必要がある。このため、小さく見えるマーカを検出する手段としては適していない。
【0016】
また、特定の色をマーカとして用いること考えられる。しかし、この場合も一般的な環境(工事現場や農場・森林)などには様々な色のものが設置されるため、マーカと似た色が存在する場合に誤って検出されるおそれがある。
【0017】
本発明は、上述した問題点を解決するために創案されたものである。すなわち、本発明の目的は、対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、画像中の対象物を10画素以下(一辺3画素程度)の少ない画素から、誤認することなく検出することができるマーカ、マーカ検出方法および装置を提供することにある。
【課題を解決するための手段】
【0018】
本発明によれば、対象物の表面に取り付けたマーカであって、
乱反射材からなる内層と、内層の外側に取り付けられた偏光フィルムからなる外層とを有し、
外光を乱反射し、地表に対し水平、垂直、又は斜めの偏光に変換して放射する、ことを特徴とするマーカが提供される。
【0019】
また本発明によれば、偏光除去手段により、上記のマーカから放射された偏光を除去し、
第1受光素子により、前記偏光を除去した入射光によりマーカを含む領域の第1画像を撮影し、
第2受光素子により、前記偏光を除去しない入射光により前記領域の第2画像を撮影し、
演算装置により、第1画像及び第2画像の対応する画素の光の強度比から、マーカの位置を検出する、ことを特徴とするマーカ検出方法が提供される。
【0020】
さらに本発明によれば、上記のマーカから放射された偏光を除去する偏光除去手段と、
前記偏光を除去した入射光によりマーカを含む領域の第1画像を撮影する第1受光素子と、
前記偏光を除去しない入射光により前記領域の第2画像を撮影する第2受光素子と、
第1画像及び第2画像の対応する画素の光の強度比から、マーカの位置を検出する演算装置と、を備えることを特徴とするマーカ検出装置が提供される。
【発明の効果】
【0021】
対象物が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、上記本発明のマーカは、外光を乱反射し、地表に対し水平、垂直、又は斜めの偏光に変換して放射するので、マーカから放射された偏光からマーカを特定して誤認することなく検出することができる。
【0022】
この場合、マーカ全体が同じ波長特性と光学特性を持ち均一な対象の計測となるため、理論的には1画素、現実的には一辺が数画素あればその特徴を見つけ出すことが出来る。そのため、画像中の対象物を10画素以下(一辺3画素程度)の少ない画素から、誤認することなく検出することができ、遠くのマーカを広い視野の計測装置で見つけることができる。
【0023】
また、自然界ではほとんど発生しない光学特性なので、誤検出することがない。
従って、外光を反射するときに、光源の位置や強さに依存しにくい光学特性変化を行っているため、外光の位置や強さの変化に対しても安定してマーカを見つけ出すことができる。
【図面の簡単な説明】
【0024】
【図1】本発明によるマーカを備えたロボットの模式図である。
【図2】本発明によるマーカの構造図である。
【図3】マーカの原理図である。
【図4】本発明によるマーカ検出装置の第1実施形態図である。
【図5】本発明によるマーカ検出装置の第2実施形態図である。
【図6】本発明によるマーカ検出装置の第3実施形態図である。
【発明を実施するための形態】
【0025】
以下、本発明の好ましい実施形態を添付図面に基づいて詳細に説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0026】
図1は、本発明によるマーカを備えたロボットの模式図である。
この図において、1は対象物であり、この例では自走ロボットである。なお、対象物1は、自律移動ロボットや自動搬送ロボットであってもよく、ロボット以外であってもよい。
【0027】
本発明のマーカ10は、この例では自走ロボット1(対象物)の外面に取り付けられた円筒形部材である。なお、マーカ10は、この形状に限定されず、平板でもその他の形状であってもよい。
【0028】
本発明のマーカ検出装置20は、この例では自走ロボット1(対象物)に取り付けられ、水平方向に旋回してその回りに位置する他の自走ロボット1(対象物)を検出するようになっている。なお、マーカ検出装置20を自走ロボット1(対象物)に取り付けずに、その他の位置(例えば固定部分)や追跡対象の人間に取り付けてもよい。
【0029】
またこの図において、測距用のレーザレーダ40が自走ロボット1(対象物)に設けられ、その回りに位置する他の自走ロボット1(対象物)までの距離を検出するようになっている。なお、レーザレーダ40は必須ではなく、これを省略してもよい。
【0030】
図2は、本発明によるマーカの構造図であり、一部を分離して示している。
この図において、本発明のマーカ10は、対象物1の表面に取り付けられた内層12、外層14、及び表面層16を有する。
内層12は乱反射材からなる。外層14は内層12の外側に取り付けられた偏光フィルムからなる。さらに表面層16は、反射防止膜からなる。
この構成により、マーカ10は、外光2を内層12で乱反射し、かつ外層14で地表に対し水平、垂直、又は斜めの偏光3に変換して放射するようになっている。外光2は、太陽光又は屋外光である。
【0031】
マーカ10は、ロボットなどの検出したい対象物1の外板に沿って以下のフィルムを貼る、もしくは、布や板の上に以下のフィルムを貼ったものである。
フィルムは内層12と外層14の2層構造になっており、内層12は高い反射率を持った乱反射材であり、PET(ポリエチレンテレフタラート)を発泡させたものや、厚手の紙を多層に貼り合わせたものが適している。内層12は、見た目は明るくて光沢の無い白色である。
外層14は、水平方向、垂直方向、又は斜め方向の偏光フィルムである。水たまりが想定される場合には垂直方向の偏光フィルムを用い、ガラス窓が想定される場合には水平方向の偏光フィルムをマーカに用いるのがよい。影響の大きい方を重視するが、両方の存在がある場合には垂直方向、又は斜め方向の偏光フィルムとし、低い位置にマーカを設置するなど、窓ガラスが視界内に入りにくい工夫を行う。
さらに外側(表面層16)に反射防止膜として反射を防止するコーティングを実施するか、反射防止フィルムを貼り付けることが望ましい。
【0032】
図3は、マーカ10の原理図である。
この図では、説明の都合上、マーカ10の内層12、外層14、及び表面層16を平面で示している。外層14は、水平方向、垂直方向、又は斜め方向の偏光フィルムである。
【0033】
図3のマーカ10に外光(太陽光、屋外光)が当たると、偏光フィルムからなる外層14により、偏光フィルムと同じ偏光の光aが通過する。通過した光aが乱反射フィルムからなる内層12にあたり、内層12の表側で全方向に乱反射する。乱反射した光bは無偏光になるが、さらに偏光フィルムからなる外層14を通過することにより地表に対し水平、垂直、又は斜めの偏光3に変換され偏光3だけがマーカ10から放射される。
【0034】
図4は、本発明によるマーカ検出装置の第1実施形態図である。
この図において、本発明のマーカ検出装置20は、偏光除去手段、第1カメラ22、偏光フィルタ23、第2カメラ24、位置補正装置26、及び演算装置28を備える。
【0035】
偏光除去手段は、この例では偏光フィルタ21である。
偏光フィルタ21は、マーカ10から放射された偏光3を除去し、マーカ10を含む領域からのその他の光を通すようになっている。すなわち偏光フィルタ21は、マーカ10から放射された水平、垂直、又は斜めの偏光3と直交する方向の偏光フィルタであり、マーカ10で反射した偏光3をカットするようになっている。
【0036】
第1カメラ22は、レンズ22b及び第1受光素子22cを有する。レンズ22bは撮影レンズであり、偏光フィルタ21を透過した入射光によりマーカ10を含む領域の第1画像10aを第1受光素子22cに結像する。第1受光素子22cは、CCD又はC−MOSである。
この構成により、第1カメラ22は、マーカ10から放射された偏光3を除去した入射光4によりマーカ10を含む領域の第1画像10aを撮影するようになっている。
【0037】
偏光フィルタ23は、この例ではマーカ10から放射された偏光3と同じ向きの偏光フィルタであり、マーカ10で反射した偏光3をそのまま通すようになっている。
【0038】
第2カメラ24は、レンズ24b、及び第2受光素子24cを有する。
レンズ24bは撮影レンズであり、フィルタ24aを透過した入射光によりマーカ10を含む領域の第2画像10bを第2受光素子24cに結像する。第2受光素子24cは、第1受光素子22cと同様のCCD又はC−MOSである。
この構成により、第2カメラ24は、マーカ10から放射された偏光3を除去しない入射光により第1画像10aと同じ領域の第2画像10bを撮影するようになっている。
【0039】
なおこの例において、偏光フィルタ23は必須ではなく、これを省略することができる。
【0040】
上述した第1画像10aと第2画像10bは、マーカ10を含む領域の画像である点で共通するが、各画像を形成するための入射光にマーカ10から放射された偏光3を含むか否かで相違する。
【0041】
位置補正装置26は、第1画像10aと第2画像10bの画素位置を対応させる。
図4の構成において、第1カメラ22と第2カメラ24は、近接して配置されているが、対象物1を一定の離れた位置から撮影するため、必然的に視差が生じる。
位置補正装置26は、この視差を補償し、同一の対象物1に対応する画素位置を第1画像10aと第2画像10bで対応付けできるようにする。
【0042】
演算装置28は、第1画像10a及び第2画像10bの対応する画素の光の強度比から、マーカ10の位置を検出する。この検出方法は後述する。
【0043】
図5は、本発明によるマーカ検出装置の第2実施形態図である。
この図において、本発明のマーカ検出装置20は、さらに、レンズ30と分割ミラー32を備える。レンズ30は、対象物1からの入射光(偏光3を含む)を光5に変換する。光5は例えば平行光である。
【0044】
分割ミラー32は、レンズ30を通過した光5を90度方向に反射する反射光5aと、光5をそのまま通過する透過光5bと、に分割するハーフミラー32aである。
その他の構成は、第1実施形態と同様である。
【0045】
上述した第1受光素子22cは、第1実施形態と同様にマーカ10から放射された偏光3を除去した入射光4によりマーカ10を含む領域の第1画像10aを撮影するようになっている。
【0046】
また、第2受光素子24cは、マーカ10から放射された偏光3を除去しない入射光により第1画像10aと同じ領域の第2画像10bを撮影するようになっている。
従って、第1画像10aと第2画像10bは、マーカ10を含む領域の画像である点で共通するが、各画像を形成するための入射光にマーカ10から放射された偏光3を含むか否かで相違する。
【0047】
位置補正装置26は、第1画像10aと第2画像10bの画素位置を対応させる。
図5の構成において、第1カメラ22と第2カメラ24は、対象物1からの同一の光を分割して撮影するため、図4のような視差は生じない。
しかし、第1画像10aと第2画像10bの画素位置が正確には一致していない場合には、位置補正装置26は、同様に同一の対象物1に対応する画素位置を第1画像10aと第2画像10bで対応付けできるようにする。一方、受光素子22c、24cを正確に設置して位置が一致できている場合には位置補正装置26を省略することもできる。
【0048】
演算装置28は、第1画像10a及び第2画像10bの対応する画素のマーカ10で反射した偏光3の強度から、マーカ10の位置を検出する。
【0049】
図6は、本発明によるマーカ検出装置の第3実施形態図である。
この例で分割ミラー32は、ワイヤーグリッドアレイミラー(又は偏光特性のあるビームスプリッタ)32bであり、偏光除去手段に相当する。
ワイヤーグリッドアレイミラー(又は偏光特性のあるビームスプリッタ)32bは、特定の偏光成分をそのまま通過する透過光5bと、その他を90度方向に反射する反射光5aとに分割する。この場合、透過光5bにマーカ10から放射された偏光3を含まないように設定するのがよい。
ワイヤーグリッドアレイミラー(又は偏光特性のあるビームスプリッタ)32bを用いる場合には、第2実施形態の偏光フィルタ21,23は必須ではなく、これを省略することができる。
【0050】
上述したマーカ10とマーカ検出装置20を用い、本発明によるマーカ10の検出は以下の方法による。
(A)偏光フィルタ21により、マーカ10から放射された偏光3を除去する。
(B)第1受光素子22cにより偏光3を除去した入射光によりマーカ10を含む領域の第1画像10aを撮影する。
(C)第2受光素子24cにより、偏光3を除去しない入射光により同じ領域の第2画像10bを撮影する。
(D)位置補正装置26により、第1画像10aと第2画像10bの画素位置を対応させる。
(E)演算装置28により、第1画像10a及び第2画像10bの対応する画素の光の強度比(明るさの比率)から、マーカ10の位置を検出する
【0051】
上記(E)では、演算装置28により、対応する画素における第1画像10a上の光の強度I1と第2画像10b上の光の強度I2の強度比I1/I2を演算し、強度比I1/I2が閾値を下回った画素位置をマーカ10の位置として検出する。この閾値は、1/2〜1/4が好ましく、後述の例では1/4である。
【0052】
第1画像10aの入射光は、マーカ10から放射された偏光3を含まないため、第2画像10bと比較して一般的に暗い画像となり、検出精度が低下する可能性がある。
この場合、補正値Kを予め設定し、第1画像10aの強度を補正値Kだけ増幅することが好ましい。
【0053】
例えば、同一の白色光に対する第1画像10a上の強度I3と第2画像10b上の強度I4から補正値K×強度比I3/I4が1になる補正値Kを予め設定し、第1画像10aの強度I1を補正値Kだけ増幅した強度比I1’/I2が上述の閾値×補正値Kを下回った画素位置をマーカ10の位置として検出する。
このように、補正値Kを予め設定し、検出レベルの低い第1画像10a上の強度I1をK倍に増幅しておくことにより、検出レベルを高め、検出精度を高めることができる。
【0054】
上述したように、図4、図5におけるマーカ検出装置20は、2つの受光素子22c、24cのマトリクス(CCDもしくはC−MOS)を持ち、2つの画像(第1画像10aと第2画像10b)を同時に撮影する。
第1画像10aと第2画像10bの画像データは、演算装置28に伝送され、演算装置28内では以下の2つの計算を実施する。
【0055】
光学系や2つの受光素子22c、24cのカメラ22、24内の設置位置のずれにより、撮影対象(対象物1やマーカ10)は、2つの受光素子22c、24cの全く同じ位置に映るわけではなく、微少なズレ(平行移動とスケール)が発生する。そのため、予めこのズレを計測して校正値を準備し、その校正値により2つの画像データが正しく重なるようなズレ補正を位置補正装置26により行う。
【0056】
各画素が同じ所を撮影している2枚の画像(第1画像10aと第2画像10b)で、同じ画素同士で明るさ(強度)の比を取る。
この明るさの比が一定の閾値を下回った部分をマーカ10として検出する。
【0057】
固定の補正値Kは事前に校正パラメータとして計測を行う。無偏光のものを撮影したときに上記式の比率が1になるように、実験値から求める。
この比(K×前述の比率)が充分小さな値、例えば1/4以下となる画素を検出する。よって明るさ(強度)の比から直接判定する場合の閾値はK×1/4となる。
【0058】
以下、本発明によるマーカ検出動作を説明する。
マーカ10によって放射された地表に対し水平、垂直、又は斜めに偏光した偏光3は、それと直交する偏光フィルタ21では遮断され、無フィルタもしくは同じ方向のフィルタであるフィルタ24aは通過する。そのため、偏光フィルタ21側の第1受光素子22cではマーカ10の明るさ(強度)はきわめて低く、もう一方の第2受光素子24cではマーカ10は本来の見えている明るさ(強度)で撮影される。
【0059】
撮影したマーカ10を含む画像(第1画像10a及び第2画像10b)に位置補正装置26により位置補正を行い、2つの画像(第1画像10a及び第2画像10b)の間で同じ場所を撮影した画素のデータが同じ位置にくるようにデータを修正する。
その後、各場所の画素で明るさを比較し、比が例えば1/4以下の部分を抽出する画像処理を実施する。理論上では偏光フィルタ21側の第1受光素子22cの明るさは0に近いので、明るさの比もきわめて小さい(0に近い)値となる。また、抽出結果には、ごま塩状のノイズなどが乗っている場合があるので、孤立点除去(塊のサイズが小さければ除去)などのノイズ除去を行った後、まとまって検出が得られている領域の位置を検出位置として出力する。
充分な明るさ(強度)の比と面積が無い場合には検出出来なかったことを出力する。
【0060】
なお地表に対し水平、垂直、又は斜めの偏光3は、自然界ではあまり発生しない光学特性なので、以下の特殊な状況を除いて誤検出することがない。
水たまりの反射はほとんど水平成分として反射され垂直偏光が小さくなる。
窓などのガラス面での反射はほとんど垂直成分として反射され水平偏光が小さくなる。
従って、マーカ10は、使用する環境により水平、垂直、又は斜めの偏光のいずれを放射(反射)するかを決定するのがよい。
【0061】
上述した本発明によれば、対象物1が太陽光で照らされた屋外のように、多様性や変化に富んだ環境下において、本発明のマーカ10は、外光を乱反射し、地表に対し水平、垂直、又は斜めの偏光3に変換して放射するので、マーカ10から放射された偏光3からマーカ10を特定して誤認することなく検出することができる。
【0062】
この場合、マーカ全体が同じ波長特性と光学特性を持ち均一な対象の計測となるため、理論的には1画素、現実的には一辺が数画素あればその特徴を見つけ出すことが出来る。そのため、画像中の対象物1を10画素以下(一辺3画素程度)の少ない画素から、誤認することなく検出することができ、遠くのマーカを広い視野の計測装置で見つけることができる。
【0063】
従って、外光を反射するときに、光源の位置や強さに依存しにくい光学特性変化を行っているため、外光の位置や強さの変化に対しても安定してマーカ10を見つけ出すことができる。
【0064】
なお、本発明は上述した実施形態に限定されず、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味および範囲内でのすべての変更を含むものである。
【符号の説明】
【0065】
1 対象物(ロボット)、2 外光、
3 偏光、4 偏光3を除去した光、
5 光、5a 反射光、5b 透過光、
10 マーカ、10a 第1画像、10b 第2画像、
12 内層(乱反射材)、14 外層(偏光フィルム)、
16 表面層(反射防止膜)、
20 マーカ検出装置、21 偏光フィルタ、
22 第1カメラ、22b レンズ、
22c 第1受光素子(CCD又はC−MOS)、
23 偏光フィルタ、24 第2カメラ、
24b レンズ、24c 第2受光素子(CCD又はC−MOS)、
26 位置補正装置、28 演算装置、
30 レンズ、32 分割ミラー、
32a ハーフミラー、
32b ワイヤーグリッドアレイミラー(又は偏光特性のあるビームスプリッタ)、
40 レーザレーダ
【特許請求の範囲】
【請求項1】
対象物の表面に取り付けたマーカであって、
乱反射材からなる内層と、内層の外側に取り付けられた偏光フィルムからなる外層とを有し、
外光を乱反射し、地表に対し水平、垂直、又は斜めの偏光に変換して放射する、ことを特徴とするマーカ。
【請求項2】
偏光除去手段により、請求項1のマーカから放射された偏光を除去し、
第1受光素子により、前記偏光を除去した入射光によりマーカを含む領域の第1画像を撮影し、
第2受光素子により、前記偏光を除去しない入射光により前記領域の第2画像を撮影し、
演算装置により、第1画像及び第2画像の対応する画素の光の強度比から、マーカの位置を検出する、ことを特徴とするマーカ検出方法。
【請求項3】
演算装置により、対応する画素における第1画像上の光の強度I1と第2画像上の光の強度I2の強度比I1/I2を演算し、
強度比I1/I2が閾値を下回った画素位置をマーカの位置として検出する、ことを特徴とする請求項2に記載のマーカ検出方法。
【請求項4】
請求項1のマーカから放射された偏光を除去する偏光除去手段と、
前記偏光を除去した入射光によりマーカを含む領域の第1画像を撮影する第1受光素子と、
前記偏光を除去しない入射光により前記領域の第2画像を撮影する第2受光素子と、
第1画像及び第2画像の対応する画素の光の強度比から、マーカの位置を検出する演算装置と、を備えることを特徴とするマーカ検出装置。
【請求項5】
前記偏光除去手段は、偏光フィルタである、ことを特徴とする請求項4に記載のマーカ検出装置。
【請求項6】
前記偏光除去手段は、ワイヤーグリッドアレイミラー又は偏光特性のあるビームスプリッタである、ことを特徴とする請求項4に記載のマーカ検出装置。
【請求項1】
対象物の表面に取り付けたマーカであって、
乱反射材からなる内層と、内層の外側に取り付けられた偏光フィルムからなる外層とを有し、
外光を乱反射し、地表に対し水平、垂直、又は斜めの偏光に変換して放射する、ことを特徴とするマーカ。
【請求項2】
偏光除去手段により、請求項1のマーカから放射された偏光を除去し、
第1受光素子により、前記偏光を除去した入射光によりマーカを含む領域の第1画像を撮影し、
第2受光素子により、前記偏光を除去しない入射光により前記領域の第2画像を撮影し、
演算装置により、第1画像及び第2画像の対応する画素の光の強度比から、マーカの位置を検出する、ことを特徴とするマーカ検出方法。
【請求項3】
演算装置により、対応する画素における第1画像上の光の強度I1と第2画像上の光の強度I2の強度比I1/I2を演算し、
強度比I1/I2が閾値を下回った画素位置をマーカの位置として検出する、ことを特徴とする請求項2に記載のマーカ検出方法。
【請求項4】
請求項1のマーカから放射された偏光を除去する偏光除去手段と、
前記偏光を除去した入射光によりマーカを含む領域の第1画像を撮影する第1受光素子と、
前記偏光を除去しない入射光により前記領域の第2画像を撮影する第2受光素子と、
第1画像及び第2画像の対応する画素の光の強度比から、マーカの位置を検出する演算装置と、を備えることを特徴とするマーカ検出装置。
【請求項5】
前記偏光除去手段は、偏光フィルタである、ことを特徴とする請求項4に記載のマーカ検出装置。
【請求項6】
前記偏光除去手段は、ワイヤーグリッドアレイミラー又は偏光特性のあるビームスプリッタである、ことを特徴とする請求項4に記載のマーカ検出装置。
【図1】


【図2】

【図3】
【図4】

【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−57531(P2013−57531A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−194701(P2011−194701)
【出願日】平成23年9月7日(2011.9.7)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月7日(2011.9.7)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]