
マーク読み取り装置、および方法

【課題】特に、布片に付されたマークを十分な精度で認識できるマーク読み取り装置、および方法を提供する。
【解決手段】布片Tを撮影するカメラ11と、撮影した布片画像を処理する画像処理装置とを備える。布片画像の明度勾配方向θを演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、布片画像の明度勾配方向θに一番近似する明度勾配方向を有するテンプレート画像に対応する種類を、布片Tの種類と判断する。織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
【解決手段】布片Tを撮影するカメラ11と、撮影した布片画像を処理する画像処理装置とを備える。布片画像の明度勾配方向θを演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、布片画像の明度勾配方向θに一番近似する明度勾配方向を有するテンプレート画像に対応する種類を、布片Tの種類と判断する。織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マーク読み取り装置、および方法に関する。さらに詳しくは、例えば、洗濯・乾燥済みの布片を次工程装置に投入する自動投入装置に取り付けられ、布片に付されたマーク(以下、「布マーク」という。)を読み取り、布片の種類や表裏を識別するマーク読み取り装置、およびその方法に関する。
【背景技術】
【0002】
ホテルや病院等では大量にタオルやシーツ、衣類等の布片が使用され、その使用済みの布片はランドリー工場で洗濯・乾燥され、再度ホテルや病院等で使用されることが一般的である。
ランドリー工場では多種類の布片を処理するため、例えば回収した洗濯物の中に他のホテルのタオルが混じっている場合には取り除かなければならない等、布片を種類ごとに分別したり、種類ごとの数量等を管理したりする必要がある。また、例えばバスタオル等にホテルのマークが付けられている場合にはそのマークを表にして折畳まなければならない等、布片の表裏を認識する必要がある。そのため、布片の種類や表裏を識別し、その結果を基に布片のハンドリング方法を決定することが求められている。
【0003】
非特許文献1に記載のとおり、洗濯・乾燥済みの布片を、アイロナーや折畳み機等の次工程装置に投入するために、布片をハンドリングする多軸ロボットシステムを備えた自動投入装置が考案されている。
しかし、この自動投入装置は、ロボットハンドの把持位置や把持姿勢を決定するために、布片の形や角部分の位置、方向を画像処理で認識するようにしているものの、布片の種類や表裏を識別するものではない。また、従来、布片に付されたマーク、中でも布片に織り込まれたマークを読み取って、布片の種類や表裏の識別を行おうとした例はなかった。
【0004】
この点、工業製品などでは画像処理を用いた文字認識が行われており(例えば非特許文献2)、この文字認識方法を布マークの読み取りに応用することも考えられる。
従来の文字認識方法は、正規化相関処理により、認識対象の画像と、あらかじめ登録されているテンプレート画像との相関値を演算し、認識対象を相関値の高いテンプレート画像の種類に分類する方法である。一般の工業製品の場合は、相関値は0.8〜1.0程度の高い値となるため、この文字認識方法により、十分な精度で識別することができる。
【0005】
しかし、布片の織り目の上に書かれたマークや、布片に織り込まれたマークは、それを写した画像に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にあるため、従来の文字認識方法を応用しても、十分な精度で識別できないという問題がある。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】小林宏明、濱田敏弘、北条博崇、秦清治、「布ハンドリングのための視覚センサと画像処理アルゴリズム」、2009年度精密工学会秋季大会学術講演会講演論文集、2009年、p.203〜204
【非特許文献2】江浪寧彦、喜多哲也、山口順一、「マッチドフィルタを用いたナンバープレート位置認識法」、第9回画像センシングシンポジウム、2004年
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は上記事情に鑑み、特に、布片に付されたマークを十分な精度で認識できるマーク読み取り装置、および方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1発明のマーク読み取り装置は、種類ごとに異なるマークが付された対象物を撮影するカメラと、該カメラで撮影した対象物画像を処理する画像処理装置とを備えるマーク読み取り装置であって、前記画像処理装置は、前記対象物画像中の複数箇所における明度勾配方向を演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の明度勾配方向の分布に一番近似する明度勾配方向の分布を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものであることを特徴とする。
第2発明のマーク読み取り装置は、第1発明において、前記画像処理装置は、前記対象物画像中に複数の明度勾配演算ウィンドウを設定し、それぞれの前記明度勾配演算ウィンドウ内の明度勾配方向を演算し、該明度勾配方向の分布を認識特徴量とし、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量と一番近似する認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものであることを特徴とする。
第3発明のマーク読み取り装置は、第2発明において、前記画像処理装置は、前記明度勾配方向を、所定方向範囲ごとにコード化した明度勾配方向コードに割り当て、該明度勾配方向コードの分布を認識特徴量とするものであることを特徴とする。
第4発明のマーク読み取り装置は、第3発明において、前記画像処理装置は、それぞれの前記明度勾配演算ウィンドウ内の明度勾配強度を演算し、あらかじめ記憶された明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を、前記明度勾配方向コードの一つである明度勾配無コードに割り当てるものであることを特徴とする。
第5発明のマーク読み取り装置は、第3または第4発明において、前記画像処理装置は、前記対象物画像中に複数の統計領域を設定し、該統計領域中に複数の明度勾配演算ウィンドウを設定し、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とするものであることを特徴とする。
第6発明のマーク読み取り装置は、第5発明において、前記画像処理装置は、前記明度勾配無コードを除く、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とするものであることを特徴とする。
第7発明のマーク読み取り装置は、第3,第4,第5または第6発明において、前記画像処理装置は、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量との相関値が一番大きい認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものであることを特徴とする。
第8発明のマーク読み取り装置は、第3,第4,第5または第6発明において、前記画像処理装置は、前記認識特徴量を特徴空間における認識特徴ベクトルとし、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴ベクトルとの距離が一番近い認識特徴ベクトルを有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものであることを特徴とする。
第9発明のマーク読み取り装置は、第8発明において、前記画像処理装置は、いずれの前記テンプレート画像の認識特徴ベクトルと前記対象物画像の認識特徴ベクトルとの距離も、あらかじめ記憶された距離閾値よりも遠い場合に、前記対象物を未登録の種類と判断するものであることを特徴とする。
第10発明のマーク読み取り装置は、第9発明において、前記テンプレート画像の認識特徴ベクトルは、同一種類の複数の対象物画像の認識特徴ベクトルの平均値であり、前記距離閾値は、前記テンプレート画像の認識特徴ベクトルと、同一種類の複数の対象物画像の認識特徴ベクトルとの距離の標準偏差に所定の定数を掛けた値であることを特徴とする。
第11発明のマーク読み取り装置は、第1,第2,第3,第4,第5,第6,第7,第8,第9または第10発明において、前記画像処理装置は、前記カメラで撮影した対象物画像に平均化フィルタをかけるものであることを特徴とする。
第12発明のマーク読み取り装置は、第1,第2,第3,第4,第5,第6,第7,第8,第9,第10または第11発明において、前記対象物を規則性のある明度分布で照らす照明を備えることを特徴とする。
第13発明のマーク読み取り装置は、第1,第2,第3,第4,第5,第6,第7,第8,第9,第10,第11または第12発明において、前記対象物を斜方から照らす照明を備えることを特徴とする。
第14発明のマーク読み取り方法は、種類ごとに異なるマークが付された対象物をカメラで撮影して対象物画像を取得し、前記対象物画像中の複数箇所における明度勾配方向を演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の明度勾配方向の分布に一番近似する明度勾配方向の分布を有するテンプレート画像に対応する種類を、前記対象物の種類と判断することを特徴とする。
第15発明のマーク読み取り方法は、第14発明において、前記対象物画像中に複数の明度勾配演算ウィンドウを設定し、それぞれの前記明度勾配演算ウィンドウ内の明度勾配方向を演算し、該明度勾配方向の分布を認識特徴量とし、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量と一番近似する認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断することを特徴とする。
第16発明のマーク読み取り方法は、第15発明において、前記明度勾配方向を、所定方向範囲ごとにコード化した明度勾配方向コードに割り当て、該明度勾配方向コードの分布を認識特徴量とすることを特徴とする。
第17発明のマーク読み取り方法は、第16発明において、それぞれの前記明度勾配演算ウィンドウ内の明度勾配強度を演算し、あらかじめ記憶された明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を、前記明度勾配方向コードの一つである明度勾配無コードに割り当てることを特徴とする。
第18発明のマーク読み取り方法は、第16または第17発明において、前記対象物画像中に複数の統計領域を設定し、該統計領域中に複数の明度勾配演算ウィンドウを設定し、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とすることを特徴とする。
第19発明のマーク読み取り方法は、第18発明において、前記明度勾配無コードを除く、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とすることを特徴とする。
第20発明のマーク読み取り方法は、第16,第17,第18または第19発明において、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量との相関値が一番大きい認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断することを特徴とする。
第21発明のマーク読み取り方法は、第16,第17,第18または第19発明において、前記認識特徴量を特徴空間における認識特徴ベクトルとし、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴ベクトルとの距離が一番近い認識特徴ベクトルを有するテンプレート画像に対応する種類を、前記対象物の種類と判断することを特徴とする。
第22発明のマーク読み取り方法は、第21発明において、いずれの前記テンプレート画像の認識特徴ベクトルと前記対象物画像の認識特徴ベクトルとの距離も、あらかじめ記憶された距離閾値よりも遠い場合に、前記対象物を未登録の種類と判断することを特徴とする。
第23発明のマーク読み取り方法は、第22発明において、前記テンプレート画像の認識特徴ベクトルは、同一種類の複数の対象物画像の認識特徴ベクトルの平均値であり、前記距離閾値は、前記テンプレート画像の認識特徴ベクトルと、同一種類の複数の対象物画像の認識特徴ベクトルとの距離の標準偏差に所定の定数を掛けた値であることを特徴とする。
第24発明のマーク読み取り方法は、第14,第15,第16,第17,第18,第19,第20,第21,第22または第23発明において、前記カメラで撮影して取得した対象物画像に平均化フィルタをかけることを特徴とする。
【発明の効果】
【0009】
第1発明によれば、明度勾配方向の分布を基にテンプレート画像との比較を行うので、特に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。そのため、布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
第2発明によれば、明度勾配方向の分布である認識特徴量を基にテンプレート画像との比較を行うので、特に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。
第3発明によれば、明度勾配方向をコード化することにより、テンプレート画像との比較を容易に行うことができる。
第4発明によれば、明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を明度勾配無コードに割り当てるので、明度勾配演算ウィンドウ内にマークが付されていない場合に、ノイズの影響で明度勾配方向をいずれかの方向を示す明度勾配方向コードに割り当てることがなく、ノイズの影響を排除できるので、精度の良い判断ができる。
第5発明によれば、統計領域ごとの明度勾配方向コードの出現頻度を認識特徴量とするので、認識特徴量の要素数を少なくすることができ、広範囲にわたる対象物画像を用いたテンプレート画像との比較を、高速に行うことができる。
第6発明によれば、明度勾配無コードを除き、いずれかの方向を示す明度勾配方向コードのみでテンプレート画像との比較をすることにより、対象物の種類ごとの特徴が認識特徴量に顕著に表れるので、精度の良い判断ができる。
第7発明によれば、対象物画像とテンプレート画像との認識特徴量の相関値を用いることにより、対象物画像をテンプレート画像にマッチングすることができ、対象物の種類を判断することができる。
第8発明によれば、対象物画像とテンプレート画像との認識特徴ベクトルの距離を用いることにより、対象物画像をテンプレート画像にマッチングすることができ、対象物の種類を判断することができる。
第9発明によれば、距離閾値を用いて対象物を未登録の種類と判断することにより、未登録の対象物を登録済みの種類と誤って判断することを防止することができる。
第10発明によれば、距離閾値を距離の標準偏差で定めるので、認識特徴量の揺らぎが大きい種類であっても、対象物が未登録の種類と判断されることを防ぐことができる。
第11発明によれば、平均化フィルタによりカメラで撮影した対象物画像を圧縮することで、後の処理を高速に行うことができる。また、各画素の明度を平均化することで、微小ノイズの除去ができる。
第12発明によれば、対象物を規則性のある明度分布で照らすことにより、対象物にマークが付されていない場合でも、明度勾配方向に規則性を持たせることができ、マークが無いことを判断することができる。
第13発明によれば、対象物を斜方から照らすことにより、例えば、布片に織り込まれたマークの凹凸に影を付けてマークを浮き出させることができる。そのため、布片に織り込まれたマークの識別を精度よく行うことができる。
第14発明によれば、明度勾配方向の分布を基にテンプレート画像との比較を行うので、特に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。そのため、布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
第15発明によれば、明度勾配方向の分布である認識特徴量を基にテンプレート画像との比較を行うので、特に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。
第16発明によれば、明度勾配方向をコード化することにより、テンプレート画像との比較を容易に行うことができる。
第17発明によれば、明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を明度勾配無コードに割り当てるので、明度勾配演算ウィンドウ内にマークが付されていない場合に、ノイズの影響で明度勾配方向をいずれかの方向を示す明度勾配方向コードに割り当てることがなく、ノイズの影響を排除できるので、精度の良い判断ができる。
第18発明によれば、統計領域ごとの明度勾配方向コードの出現頻度を認識特徴量とするので、認識特徴量の要素数を少なくすることができ、広範囲にわたる対象物画像を用いたテンプレート画像との比較を、高速に行うことができる。
第19発明によれば、明度勾配無コードを除き、いずれかの方向を示す明度勾配方向コードのみでテンプレート画像との比較をすることにより、対象物の種類ごとの特徴が認識特徴量に顕著に表れるので、精度の良い判断ができる。
第20発明によれば、対象物画像とテンプレート画像との認識特徴量の相関値を用いることにより、対象物画像をテンプレート画像にマッチングすることができ、対象物の種類を判断することができる。
第21発明によれば、対象物画像とテンプレート画像との認識特徴ベクトルの距離を用いることにより、対象物画像をテンプレート画像にマッチングすることができ、対象物の種類を判断することができる。
第22発明によれば、距離閾値を用いて対象物を未登録の種類と判断することにより、未登録の対象物を登録済みの種類と誤って判断することを防止することができる。
第23発明によれば、距離閾値を距離の標準偏差で定めるので、認識特徴量の揺らぎが大きい種類であっても、対象物が未登録の種類と判断されることを防ぐことができる。
第24発明によれば、平均化フィルタによりカメラで撮影した対象物画像を圧縮することで、後の処理を高速に行うことができる。また、各画素の明度を平均化することで、微小ノイズの除去ができる。
【図面の簡単な説明】
【0010】
【図1】明度勾配演算ウィンドウの説明図である。
【図2】明度勾配演算ウィンドウの座標の定義の説明図であって、(A)は画素数Nが偶数の場合、(B)は画素数Nが奇数の場合である。
【図3】明度勾配方向コードの説明図である。
【図4】比較領域、統計領域、および明度勾配演算ウィンドウの説明図である。
【図5】統計領域ごとの度勾配方向コードの出現頻度のヒストグラムである。
【図6】認識特徴ベクトルの説明図である。
【図7】距離閾値の説明図である。
【図8】従来方法の試験結果であって、相関値の分布のグラフである。
【図9】本発明の正規化相関処理を用いた方法の試験結果であって、各組合せにおける相関値の表である。
【図10】自動投入装置の説明図である。
【図11】本発明の一実施形態に係るマーク読み取り装置のカメラ位置の説明図である。
【図12】同マーク読み取り装置の照明位置の説明図である。
【図13】代表的な布片画像である。
【図14】照明の明度分布の説明図である。
【図15】平均化フィルタの説明図である。
【発明を実施するための形態】
【0011】
つぎに、本発明の実施形態を図面に基づき説明する。
本発明の一実施形態に係るマーク読み取り装置は、例えば、図10に示すような自動投入装置Xに取り付けられる。
図10において、1は布片Tを取り込むための取上げロボット、2および3はコンベヤ、4は傾斜スライダ、5は布片Tを展開するための展開ロボット、6は排出コンベヤである。これら、取上げロボット1、傾斜スライダ4、展開ロボット5が協働し、コンベヤ2上に山積みされた布片Tを取り込み、これを1枚ずつ分離し、平たく展開をして、排出コンベヤ6でアイロナーや折畳み機等の次工程装置に投入する。
【0012】
マーク読み取り装置は、布片Tを撮影するカメラと、カメラに接続された画像処理装置と、布片Tを照らす照明とで構成されている。
図11に示すように、排出コンベヤ6の上方には、排出コンベヤ6上に平たく展開されて搬送される布片Tを撮影するカメラ11が設けられている。カメラ11としては、エリアセンサや、ラインセンサを用いることができる。カメラ11は図示しない画像処理装置に接続されており、カメラ11で撮影した布片Tの画像(以下、「布片画像」という。)を画像処理することができるようになっている。
なお、「布片」は特許請求の範囲に記載の「対象物」に相当し、「布片画像」は特許請求の範囲に記載の「対象物画像」に相当する。
【0013】
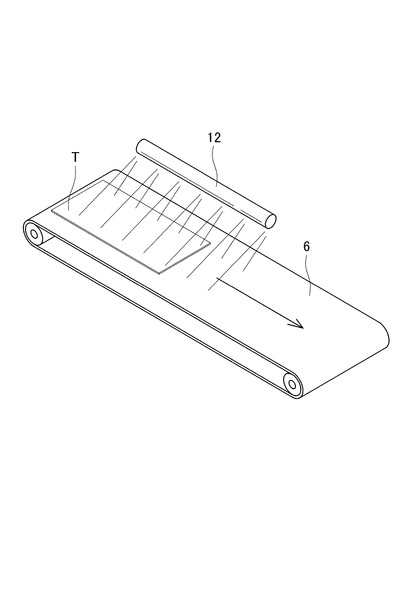
また、図12に示すように、排出コンベヤ6の近傍には、カメラ11の撮像位置を照らす蛍光灯等の照明12が設けられている。
ところで、布片Tに付されるマークの多くは、インクなどを用いた印刷ではなく、ジャガード織り等で布地に織り込まれたマークであり、マークと布地との間に色の差がない。そのため、一般に行われるように布片Tを真上から照らすと、マークと布地との明度の差がほとんどなくなり、マークを読み取ることが困難になる。
そこで、図12に示すように、照明12を撮像位置の横の低い位置に設置し、布片Tを斜方から照らすようにする。このようにすれば、図13に示すように、布片Tに織り込まれたマークの凹凸に影を付けてマークを浮き出させることができる。そのため、布片Tに織り込まれたマークの識別を精度よく行うことができる。
【0014】
また、図14に示すように、照明12は、布片Tの一方(図14における右側)が暗く、他方(図14における左側)にいくに従って明るくなるような、規則性のある明度分布で布片Tを照らすようにする。これは、明るく照らされた方(図14における左側)に照明12を設置することで容易に実現できる。
この効果については、後述する。
【0015】
なお、図12では、照明12をコンベヤ6の側方に設置したが、コンベヤ6の上方(図12において、布片Tを中心に照明12を水平面内で90°回転した位置)に設置するなど、撮像位置において布片Tを斜方から照らすことができれば、その設置位置は限定されない。また、線光源に限らず、点光源としてもよい。
さらに、図14に示すような一方向に明度が変化する明度分布に限らず、規則性さえあれば、どのような明度分布としてもよい。
【0016】
さらになお、マーク読み取り装置は自動投入装置X以外の他の装置に設けてもよく、その取り付け場所は限定されない。特に、折畳み仕上機、あるいは作業員による折畳みの前段階に設置すれば、マークを読み取って布片Tを種類ごとに分別したり、マークを表にして折畳んだりできるので好ましい。
【0017】
つぎに、上記マーク読み取り装置を用いた布マークの読み取り方法について説明する。
まず、自動投入装置Xの動作により、布片Tが排出コンベヤ6上に平たく展開されて搬送されると、カメラ11でその布片Tを撮影して、布片画像を得る。
図13に示すように、布片画像には布片Tの織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にあるので、そのノイズに惑わされることなく、布マークを読み取る必要がある。そこで、大きく次の2つのステップで布マークの読み取りを行う。
(1)平均化フィルタによる微小ノイズ成分の除去
(2)明度勾配方向を用いたテンプレート画像とのマッチング
ここで、テンプレート画像とは、あらかじめ画像処理装置に記憶された布片の種類、表裏のごとの標準的な布片画像のことである。カメラ11で撮影した布片画像をいずれかのテンプレート画像にマッチングさせることで、布片Tの種類、表裏を判断するのである。なお、特許請求の範囲に記載の「種類」とは、布片の種類だけでなく、表裏も含む概念である。
ステップ(2)におけるマッチング方法には次の2種類がある。
(2.1)正規化相関処理を用いた方法
(2.2)ベクトル間距離を用いた方法
以下、それぞれについて詳説する。
【0018】
(1)平均化フィルタによる微小ノイズ成分の除去
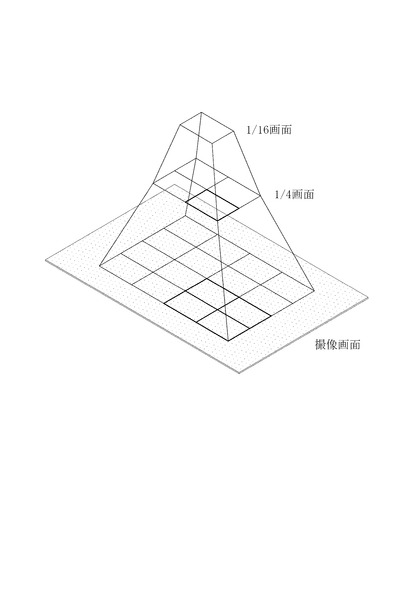
画像処理装置は、カメラ11で撮影した布片画像に平均化フィルタをかけることによって、布片画像を圧縮し、微小ノイズを除去する。ここで、平均化フィルタとは、周知の画像処理方法であって、画素数が減少し、微小ノイズが除去されることが知られている。
具体的には、図15に示すように、カメラ11で撮影した撮像画像を2×2画素単位に分割し、その4画素の明度の平均値を1画素の明度とすることにより、全体で1/4の画素数となる布片画像を得る。同様の処理を2回行うことで、全体で1/16の画素数である布片画像が得られる。
平均化フィルタにより布片画像を圧縮することで、後のステップ(2)の処理を高速に行うことができる。また、各画素の明度を平均化することで、微小ノイズの除去ができる。
【0019】
なお、上記では最終的に16画素の平均としたが、どの程度の平均化フィルタをかけるか、すなわち、撮像画像における何画素分を平均するかは、ステップ(2)におけるテンプレート画像とのマッチング精度や、処理速度が最適となるように決定すればよい。もちろん、マッチング精度や、処理速度によっては、平均化フィルタをかけなくてもよい。
また、上記のように、処理を2回に分けて行う以外にも、1回で処理を完了するようにしてもよい。
【0020】
(2)明度勾配方向を用いたテンプレート画像とのマッチング
つぎに、画像処理装置は、平均化フィルタ後の布片画像を用いて、テンプレート画像とのマッチングを行う。本発明では、布片画像のノイズの影響を排除するため、明度勾配方向をマッチングのために用いる。ここで、明度勾配方向とは、画像内において明度が明るく変化する方向を意味する。
まず、明度勾配方向の演算方法について説明する。
【0021】
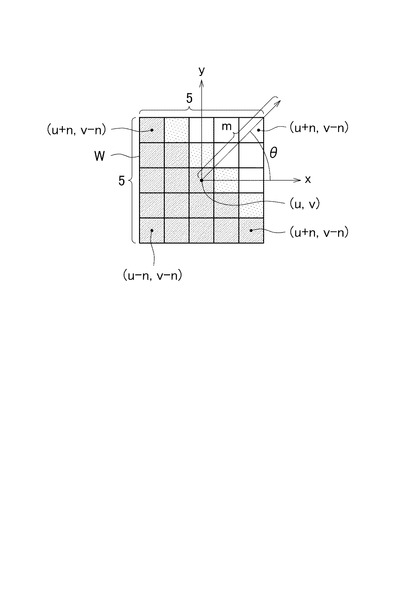
図1に示すように、布片画像中に明度勾配演算ウィンドウWを設定し、その明度勾配演算ウィンドウW内の明度勾配方向を演算する。
明度勾配演算ウィンドウW内の中心座標を(u,v)とし、明度勾配演算ウィンドウWの幅を定める画素数をnとすると、明度勾配演算ウィンドウWは、座標(u−n,v−n)、(u+n,v−n)、(u−n,v+n)、(u+n,v+n)で囲まれた領域である。
ここで、明度勾配演算ウィンドウWは1辺の画素数Nが2以上の正方形であり、nは、
【数1】

で表される。
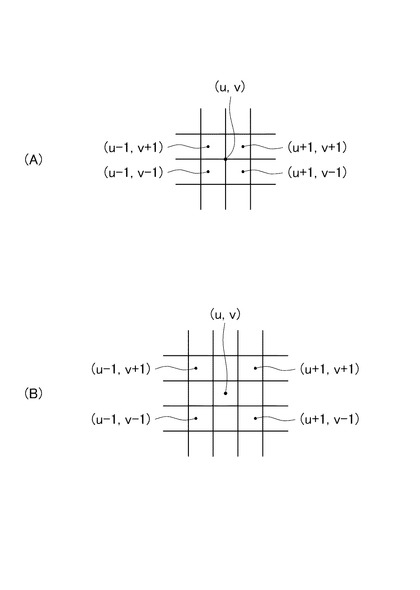
なお、図2に示すように、Nが偶数の場合(A)は、明度勾配演算ウィンドウWの中心座標(u,v)は、画素の境界の交点に相当し、その交点に隣接する画素が(u−1,v−1)、(u+1,v−1)、(u−1,v+1)、(u+1,v+1)と定義される。一方、Nが奇数の場合(B)は、明度勾配演算ウィンドウWの中心座標(u,v)は、一つの画素に相当し、その画素の四隅に隣接する画素が(u−1,v−1)、(u+1,v−1)、(u−1,v+1)、(u+1,v+1)と定義される。
【0022】
明度勾配演算ウィンドウW内の明度勾配方向θ(u,v)は、座標(u,v)の画素の明度をI(u,v)とすると、
【数2】
で表される。
このように、明度勾配方向は、明度勾配演算ウィンドウW内の画素の明度を用いた簡易な演算により定まるので、演算速度が速い。
【0023】
図1に示すように、本実施形態では明度勾配演算ウィンドウWを5×5画素としている。したがって、数1によれば、n=2である。
ただし、明度勾配演算ウィンドウWは任意の大きさとすることができる。しかし、小さすぎると明度勾配方向にノイズの影響が表れ、大きすぎると明度勾配方向に布マークによる明度変化を反映することができなくなる。そのため、テンプレート画像とのマッチング精度が最適となるように、明度勾配演算ウィンドウWの大きさを決定すればよい。
【0024】
数2で演算される明度勾配方向はラジアン角度であるため、このままでは後のマッチング処理が困難となる。そこで、明度勾配方向を所定方向範囲ごとにコード化する。
図3に示すように、明度勾配方向を8方向に分けて、それぞれ1〜8の明度勾配方向コードと定義する。したがって、π/4radごとの方向範囲に分けられている。明度勾配方向コード1は、−π/8〜+π/8radの範囲であり、明度勾配方向コード2以降は、π/4radずつずれている。例えば、明度勾配方向がx軸正方向であれば明度勾配方向コード1、y軸正方向であれば明度勾配方向コード3、x軸負方向であれば明度勾配方向コード5、y軸負方向であれば明度勾配方向コード7にそれぞれ割り当てられる。
【0025】
なお、上記では8方向に分けたが、より細かく分けてもよいし、より粗く分けてもよい。テンプレート画像とのマッチング精度が最適となるように、明度勾配方向コードの数を決定すればよい。
【0026】
また、明度勾配演算ウィンドウW内の明度勾配強度が、あらかじめ画像処理装置に記憶された明度勾配強度閾値を超えない場合には、明度勾配無コード9に割り当てる。ここで、明度勾配強度とは、明度の変化の大きさを示す値である。
明度勾配演算ウィンドウW内の明度勾強度m(u,v)は、
【数3】
で表される。
このように、明度勾強度は、明度勾配演算ウィンドウ内の画素の明度を用いた簡易な演算により定まるので、演算速度が速い。
【0027】
明度勾配演算ウィンドウW内に布マークが付されていない場合には、明度の変化があまりないので明度勾配強度が小さくなる。このような場合に、ノイズの影響で生じる明度勾配方向をいずれかの明度勾配方向コード1〜8に割り当てることをせず、明度勾配無コード9に割り当てる。その結果、ノイズの影響を排除できるので、精度の良い判断ができる。
明度勾配強度閾値は、布マークが付されていない場合に明度勾配無コード9に割り当てるように、最適な値に設定すればよい。
【0028】
以上ように、ラジアン角度で演算された明度勾配方向を、明度勾配方向コード1〜9に割り当てることにより、以後の処理が容易となる。
【0029】
テンプレート画像とのマッチング処理においては、布片画像中に複数の明度勾配演算ウィンドウWを設定し、それぞれの明度勾配演算ウィンドウW内の明度勾配方向コードを演算する。
具体的には、図4に示すように、布片画像中の布マークが付されていると予想される領域に75×50画素の比較領域Cを設定し、その比較領域Cを5×5の統計領域Sに分割する。このとき、統計領域Sは、15×10画素となる。
この統計領域S中に明度勾配演算ウィンドウWを複数設定し、それぞれの明度勾配演算ウィンドウW内の明度勾配方向コードを演算する。具体的には、まず、統計領域S中の左上に明度勾配演算ウィンドウWを設定し、この明度勾配演算ウィンドウW内の明度勾配方向と明度勾強度を演算し、明度勾配方向コードに割り当てる。その後、明度勾配演算ウィンドウWを1画素単位、もしくは数画素単位にシフトさせながら、各位置で明度勾配方向コードを演算していく。したがって、1画素単位にシフトした場合では、1統計領域当たり、66個の明度勾配方向コードが演算されることになる。
【0030】
図5に示すように、統計領域ごとの度勾配方向コードの出現頻度をヒストグラムにすると、1統計領域当たり9個の要素からなるヒストグラムが得られ、全25個の統計領域を合わせると、9×25=225個の要素からなるヒストグラムが得られる。この225要素の出現頻度を認識特徴量と定義する。以後の処理において、この認識特徴量を用いてテンプレート画像とのマッチングを行う。
統計領域ごとの明度勾配方向コードの出現頻度を認識特徴量とするので、各明度勾配演算ウィンドウW内の明度勾配方向コードを取り扱う場合に比べて要素数を少なくすることができ、広範囲にわたる布片画像を用いたテンプレート画像とのマッチングを、高速に行うことができる。
【0031】
なお、上記では、比較領域Cを75×50画素としたが、これより広くてもよいし、狭くてもよい。対象となる布片の布マークが比較領域Cの中に含まれるように設定すればよい。
また、上記では比較領域Cを5×5の統計領域Sに分割したが、これよりも多く分割してもよいし、少なく分割してもよい。多く分割した場合には、認識特徴量の要素数が多くなり、少なく分割した場合には、認識特徴量の要素数が少なくなる。テンプレート画像とのマッチング精度が最適となるように、分割数を決定すればよい。
【0032】
ところで、布片Tの種類、表裏を判断するには、あらかじめテンプレート画像を画像処理装置に記憶しておく必要がある。
そのため、あらかじめ、自動投入装置Xで取り扱う布片Tの種類、表裏ごとに布片画像を撮影し、それをテンプレート画像として、そのテンプレート画像ごとの認識特徴量を演算し、画像処理装置に記憶しておく。
なお、テンプレート画像自体はマッチング処理に用いないので、認識特徴量と、その認識特徴量に対応する布片の種類、表裏を、画像処理装置に記憶しておけばよい。
【0033】
また、布片が無地である場合には、通常、織り目により生じる細かい凹凸や、シワ等に起因するノイズにより、明度勾配方向コードがランダムに変わる。しかしながら、図14に示すように、照明12は、規則性のある明度分布で布片Tを照らすようにしているから、布片が無地であっても、明度勾配方向コードに規則性を持たせることができる。
したがって、無地の布片であってもテンプレート画像として記憶しておくことができ、対象とする布片Tが無地であるか判断することができる。
【0034】
(2.1)正規化相関処理を用いた方法
つぎに、布片画像とテンプレート画像とのマッチングを行う。まず、正規化相関処理を用いた方法について説明する。
布片画像から得られた認識特徴量と、各テンプレート画像の認識特徴量との相関値を順次演算していき、布片画像を相関値が一番大きいテンプレート画像にマッチングさせる。ここで、相関値の演算は、周知の正規化相関処理により演算することができる。
そして、布片Tが、マッチングしたテンプレート画像の種類、表裏であると判断する。
認識特徴量は、布片画像のノイズが排除されているので、相関値が高くなり、ノイズに惑わされることなく、精度の良い判断ができる。
【0035】
なお、相関値を演算するために用いる認識特徴量は、上記で演算した全ての要素(225要素)を用いてもよいし、明度勾配無コード9の出現頻度を除いた要素(200要素)を用いてもよい。
統計領域S内に布マークが付されていない場合、あるいは、統計領域S内の一部にのみ布マークが付されている場合は、他の明度勾配コード1〜8に比べて、明度勾配無コード9の出現頻度が高くなる。そこで、明度勾配無コード9の出現頻度を除き、明度勾配コード1〜8のみとすると、布片の種類、表裏ごとの特徴が認識特徴量に顕著に表れる。そのため、他種類のテンプレート画像との分離が容易となり、テンプレート画像とのマッチングを精度よく行うことができる。
【0036】
(2.2)ベクトル間距離を用いた方法
つぎに、ベクトル間距離を用いた方法について説明する。
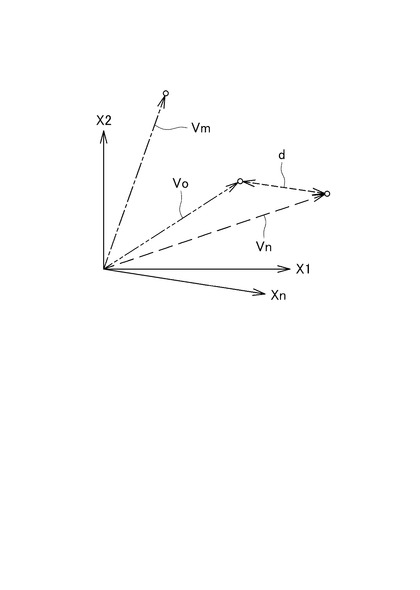
本方法では、認識特徴量をその要素数の次元(225次元)のベクトル(以下、「認識特徴ベクトル」という。)として扱う。
図6に示すように、225次元の特徴空間を定めると、布片画像から得られた認識特徴ベクトルV0、およびテンプレート画像の認識特徴ベクトルVn、Vm、・・・は、その特徴空間におけるベクトルとして表される。
画像処理装置は、布片画像から得られた認識特徴ベクトルV0と、各テンプレート画像の認識特徴ベクトルVn、Vm、・・・との距離dを順次演算していき、布片画像をベクトル間距離dが一番近いテンプレート画像にマッチングさせる。
そして、布片Tが、マッチングしたテンプレート画像の種類、表裏であると判断する。
ここで、認識特徴ベクトルV0と、認識特徴ベクトルVnとの距離dは、
【数4】
で表される。ここで、Mはベクトルの次元の数であり、本実施形態の場合M=225である。また、V(i)は、i番目の要素の値を意味する。
認識特徴ベクトルは、布片画像のノイズが排除されているので、ノイズに惑わされることなく、精度の良い判断ができる。
【0037】
ところで、上記方法では、テンプレート画像として登録されていない未登録の布片Tの布片画像が供給されても、ベクトル間距離dが一番近いテンプレート画像にマッチングするため、誤った判断をしてしまう。
そこで図7に示すように、上記方法で認識特徴ベクトルV0と認識特徴ベクトルVnとの距離dを演算した後に、dが距離閾値lより大きければ、マッチングしないと判断する。最終的に、いずれのテンプレート画像にもマッチングしない場合に、布片Tを未登録の種類と判断するようにする。
このようにすれば、未登録の布片Tを登録済みの種類と誤って判断することを防止することができる。
【0038】
距離閾値lは、任意の定数としてもよいが、テンプレート画像ごとに定める方が好ましい。
そのためには、あらかじめテンプレート画像を画像処理装置に記憶する際に、同一種類、表裏の布片画像を複数枚(10枚程度)撮影しておき、それぞれの布片画像で得られる認識特徴量の要素ごとの平均値を、そのテンプレート画像の認識特徴量とする。そして、そのテンプレート画像の認識特徴量から得られる認識特徴ベクトルと、それぞれの布片画像の認識特徴量から得られる認識特徴ベクトルとの距離を演算し、その距離の標準偏差σを得ておく。この標準偏差σに定数kを掛けた値kσをそのテンプレート画像の距離閾値lとする。なお、定数kは未登録種類の判断が最適となるように決定すればよい。
布片の種類、表裏によっては、得られる認識特徴量の揺らぎが大きい場合があるが、このように、距離の標準偏差σで距離閾値lを定めれば、揺らぎの大きい種類、表裏であっても、布片Tが未登録の種類と判断されることを防ぐことができる。
【0039】
なお、認識特徴ベクトルは、上記で演算した全ての要素(225要素)を用いてもよいし、明度勾配無コード9の出現頻度を除いた要素(200要素)を用いてもよい。
この場合、布片の種類、表裏ごとの特徴が認識特徴ベクトルに顕著に表れるため、他種類のテンプレート画像との分離が容易となり、テンプレート画像とのマッチングを精度よく行うことができる。
【0040】
以上により得られた、画像処理装置による布片Tの種類、表裏の判断結果を基に、自動投入装置Xもしくは次工程装置における布片Tのハンドリング方法を決定することができる。
【0041】
(試験)
つぎに、本発明のマーク読み取り精度の試験について説明する。
(1)従来方法
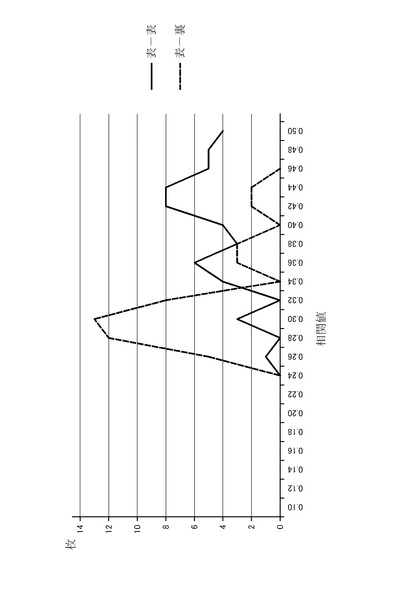
まず、従来方法によるマーク読み取りの精度について説明する。従来方法は、正規化相関処理により、布片画像とテンプレート画像との相関値を演算し、布片を相関値の高いテンプレート画像の種類に分類する方法である。
試験は、あらかじめ、ある1種類のタオルの表面と裏面の布片画像をテンプレート画像として画像処理装置に記憶させておき、同一種類のタオルの表面を試験対象として、その試験対象の布片画像と各テンプレート画像との相関値を演算した。これを複数回試行した。
その結果、相関値の分布は図8に示すようになった。図8における実線で示すように、試験対象の布片画像(表面)と、同一種類の表面のテンプレート画像との相関値は、0.25〜0.5に分布した。すなわち、従来方法の場合、高い相関値が得られず十分な精度で識別することができないことが分かる。
また、図8における破線で示すように、試験対象の布片画像(表面)と、同一種類の裏面のテンプレート画像との相関値は、0.25〜0.45に分布した。すなわち、表面のテンプレート画像との相関値の分布との重なりが多いため、表裏の識別が不可能であることが分かる。
【0042】
(2)本発明の正規化相関処理を用いた方法
つぎに、本発明のステップ(2)において正規化相関処理を用いた場合のマーク読み取りの精度について説明する。
試験は、あらかじめ、5種類のタオルA〜Eの表裏の布片画像を10種類のテンプレート画像として画像処理装置に記憶させておき、同一の5種類のタオルA〜Eを順次試験対象として、その試験対象の布片画像と各テンプレート画像との相関値を演算した。すなわち、表裏あわせて10種類の布片画像と、10種類のテンプレート画像との100通りの組合せの相関値を演算した。布片画像の撮影は、1種類ごとに5回行い、それぞれについて相関値を演算した。
その結果、図9に示す表が得られた。表は、試験対象ごとに、各テンプレート画像との相関値が表されており、その相関値は、1つの組合せ毎に5回試行して得られた平均値である。
これによれば、同じ種類同士である対角線上(図9における太枠内)の相関値は十分高い値を示しており、それ以外の組み合わせの相関値は低い値であるので、布片の種類の判断が可能であることが分かる。
【0043】
(他の実施形態)
本発明に係るマーク読み取り装置は、上述の布マークに限らず、あらゆる対象物に印刷されたマーク、おるいは凹凸で形成されたマークの読み取りに用いることができる。この場合にも、布マークの識別の場合と同様に、マーク読み取り精度を高める効果が得られる。
【符号の説明】
【0044】
X 自動投入装置
T 布片
1 取上げロボット
2、3 コンベヤ
4 傾斜スライダ
5 展開ロボット
6 排出コンベヤ
11 カメラ
12 照明
W 明度勾配演算ウィンドウ
C 比較領域
S 統計領域
【技術分野】
【0001】
本発明は、マーク読み取り装置、および方法に関する。さらに詳しくは、例えば、洗濯・乾燥済みの布片を次工程装置に投入する自動投入装置に取り付けられ、布片に付されたマーク(以下、「布マーク」という。)を読み取り、布片の種類や表裏を識別するマーク読み取り装置、およびその方法に関する。
【背景技術】
【0002】
ホテルや病院等では大量にタオルやシーツ、衣類等の布片が使用され、その使用済みの布片はランドリー工場で洗濯・乾燥され、再度ホテルや病院等で使用されることが一般的である。
ランドリー工場では多種類の布片を処理するため、例えば回収した洗濯物の中に他のホテルのタオルが混じっている場合には取り除かなければならない等、布片を種類ごとに分別したり、種類ごとの数量等を管理したりする必要がある。また、例えばバスタオル等にホテルのマークが付けられている場合にはそのマークを表にして折畳まなければならない等、布片の表裏を認識する必要がある。そのため、布片の種類や表裏を識別し、その結果を基に布片のハンドリング方法を決定することが求められている。
【0003】
非特許文献1に記載のとおり、洗濯・乾燥済みの布片を、アイロナーや折畳み機等の次工程装置に投入するために、布片をハンドリングする多軸ロボットシステムを備えた自動投入装置が考案されている。
しかし、この自動投入装置は、ロボットハンドの把持位置や把持姿勢を決定するために、布片の形や角部分の位置、方向を画像処理で認識するようにしているものの、布片の種類や表裏を識別するものではない。また、従来、布片に付されたマーク、中でも布片に織り込まれたマークを読み取って、布片の種類や表裏の識別を行おうとした例はなかった。
【0004】
この点、工業製品などでは画像処理を用いた文字認識が行われており(例えば非特許文献2)、この文字認識方法を布マークの読み取りに応用することも考えられる。
従来の文字認識方法は、正規化相関処理により、認識対象の画像と、あらかじめ登録されているテンプレート画像との相関値を演算し、認識対象を相関値の高いテンプレート画像の種類に分類する方法である。一般の工業製品の場合は、相関値は0.8〜1.0程度の高い値となるため、この文字認識方法により、十分な精度で識別することができる。
【0005】
しかし、布片の織り目の上に書かれたマークや、布片に織り込まれたマークは、それを写した画像に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にあるため、従来の文字認識方法を応用しても、十分な精度で識別できないという問題がある。
【先行技術文献】
【非特許文献】
【0006】
【非特許文献1】小林宏明、濱田敏弘、北条博崇、秦清治、「布ハンドリングのための視覚センサと画像処理アルゴリズム」、2009年度精密工学会秋季大会学術講演会講演論文集、2009年、p.203〜204
【非特許文献2】江浪寧彦、喜多哲也、山口順一、「マッチドフィルタを用いたナンバープレート位置認識法」、第9回画像センシングシンポジウム、2004年
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は上記事情に鑑み、特に、布片に付されたマークを十分な精度で認識できるマーク読み取り装置、および方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1発明のマーク読み取り装置は、種類ごとに異なるマークが付された対象物を撮影するカメラと、該カメラで撮影した対象物画像を処理する画像処理装置とを備えるマーク読み取り装置であって、前記画像処理装置は、前記対象物画像中の複数箇所における明度勾配方向を演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の明度勾配方向の分布に一番近似する明度勾配方向の分布を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものであることを特徴とする。
第2発明のマーク読み取り装置は、第1発明において、前記画像処理装置は、前記対象物画像中に複数の明度勾配演算ウィンドウを設定し、それぞれの前記明度勾配演算ウィンドウ内の明度勾配方向を演算し、該明度勾配方向の分布を認識特徴量とし、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量と一番近似する認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものであることを特徴とする。
第3発明のマーク読み取り装置は、第2発明において、前記画像処理装置は、前記明度勾配方向を、所定方向範囲ごとにコード化した明度勾配方向コードに割り当て、該明度勾配方向コードの分布を認識特徴量とするものであることを特徴とする。
第4発明のマーク読み取り装置は、第3発明において、前記画像処理装置は、それぞれの前記明度勾配演算ウィンドウ内の明度勾配強度を演算し、あらかじめ記憶された明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を、前記明度勾配方向コードの一つである明度勾配無コードに割り当てるものであることを特徴とする。
第5発明のマーク読み取り装置は、第3または第4発明において、前記画像処理装置は、前記対象物画像中に複数の統計領域を設定し、該統計領域中に複数の明度勾配演算ウィンドウを設定し、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とするものであることを特徴とする。
第6発明のマーク読み取り装置は、第5発明において、前記画像処理装置は、前記明度勾配無コードを除く、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とするものであることを特徴とする。
第7発明のマーク読み取り装置は、第3,第4,第5または第6発明において、前記画像処理装置は、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量との相関値が一番大きい認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものであることを特徴とする。
第8発明のマーク読み取り装置は、第3,第4,第5または第6発明において、前記画像処理装置は、前記認識特徴量を特徴空間における認識特徴ベクトルとし、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴ベクトルとの距離が一番近い認識特徴ベクトルを有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものであることを特徴とする。
第9発明のマーク読み取り装置は、第8発明において、前記画像処理装置は、いずれの前記テンプレート画像の認識特徴ベクトルと前記対象物画像の認識特徴ベクトルとの距離も、あらかじめ記憶された距離閾値よりも遠い場合に、前記対象物を未登録の種類と判断するものであることを特徴とする。
第10発明のマーク読み取り装置は、第9発明において、前記テンプレート画像の認識特徴ベクトルは、同一種類の複数の対象物画像の認識特徴ベクトルの平均値であり、前記距離閾値は、前記テンプレート画像の認識特徴ベクトルと、同一種類の複数の対象物画像の認識特徴ベクトルとの距離の標準偏差に所定の定数を掛けた値であることを特徴とする。
第11発明のマーク読み取り装置は、第1,第2,第3,第4,第5,第6,第7,第8,第9または第10発明において、前記画像処理装置は、前記カメラで撮影した対象物画像に平均化フィルタをかけるものであることを特徴とする。
第12発明のマーク読み取り装置は、第1,第2,第3,第4,第5,第6,第7,第8,第9,第10または第11発明において、前記対象物を規則性のある明度分布で照らす照明を備えることを特徴とする。
第13発明のマーク読み取り装置は、第1,第2,第3,第4,第5,第6,第7,第8,第9,第10,第11または第12発明において、前記対象物を斜方から照らす照明を備えることを特徴とする。
第14発明のマーク読み取り方法は、種類ごとに異なるマークが付された対象物をカメラで撮影して対象物画像を取得し、前記対象物画像中の複数箇所における明度勾配方向を演算し、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の明度勾配方向の分布に一番近似する明度勾配方向の分布を有するテンプレート画像に対応する種類を、前記対象物の種類と判断することを特徴とする。
第15発明のマーク読み取り方法は、第14発明において、前記対象物画像中に複数の明度勾配演算ウィンドウを設定し、それぞれの前記明度勾配演算ウィンドウ内の明度勾配方向を演算し、該明度勾配方向の分布を認識特徴量とし、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量と一番近似する認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断することを特徴とする。
第16発明のマーク読み取り方法は、第15発明において、前記明度勾配方向を、所定方向範囲ごとにコード化した明度勾配方向コードに割り当て、該明度勾配方向コードの分布を認識特徴量とすることを特徴とする。
第17発明のマーク読み取り方法は、第16発明において、それぞれの前記明度勾配演算ウィンドウ内の明度勾配強度を演算し、あらかじめ記憶された明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を、前記明度勾配方向コードの一つである明度勾配無コードに割り当てることを特徴とする。
第18発明のマーク読み取り方法は、第16または第17発明において、前記対象物画像中に複数の統計領域を設定し、該統計領域中に複数の明度勾配演算ウィンドウを設定し、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とすることを特徴とする。
第19発明のマーク読み取り方法は、第18発明において、前記明度勾配無コードを除く、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とすることを特徴とする。
第20発明のマーク読み取り方法は、第16,第17,第18または第19発明において、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量との相関値が一番大きい認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断することを特徴とする。
第21発明のマーク読み取り方法は、第16,第17,第18または第19発明において、前記認識特徴量を特徴空間における認識特徴ベクトルとし、あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴ベクトルとの距離が一番近い認識特徴ベクトルを有するテンプレート画像に対応する種類を、前記対象物の種類と判断することを特徴とする。
第22発明のマーク読み取り方法は、第21発明において、いずれの前記テンプレート画像の認識特徴ベクトルと前記対象物画像の認識特徴ベクトルとの距離も、あらかじめ記憶された距離閾値よりも遠い場合に、前記対象物を未登録の種類と判断することを特徴とする。
第23発明のマーク読み取り方法は、第22発明において、前記テンプレート画像の認識特徴ベクトルは、同一種類の複数の対象物画像の認識特徴ベクトルの平均値であり、前記距離閾値は、前記テンプレート画像の認識特徴ベクトルと、同一種類の複数の対象物画像の認識特徴ベクトルとの距離の標準偏差に所定の定数を掛けた値であることを特徴とする。
第24発明のマーク読み取り方法は、第14,第15,第16,第17,第18,第19,第20,第21,第22または第23発明において、前記カメラで撮影して取得した対象物画像に平均化フィルタをかけることを特徴とする。
【発明の効果】
【0009】
第1発明によれば、明度勾配方向の分布を基にテンプレート画像との比較を行うので、特に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。そのため、布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
第2発明によれば、明度勾配方向の分布である認識特徴量を基にテンプレート画像との比較を行うので、特に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。
第3発明によれば、明度勾配方向をコード化することにより、テンプレート画像との比較を容易に行うことができる。
第4発明によれば、明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を明度勾配無コードに割り当てるので、明度勾配演算ウィンドウ内にマークが付されていない場合に、ノイズの影響で明度勾配方向をいずれかの方向を示す明度勾配方向コードに割り当てることがなく、ノイズの影響を排除できるので、精度の良い判断ができる。
第5発明によれば、統計領域ごとの明度勾配方向コードの出現頻度を認識特徴量とするので、認識特徴量の要素数を少なくすることができ、広範囲にわたる対象物画像を用いたテンプレート画像との比較を、高速に行うことができる。
第6発明によれば、明度勾配無コードを除き、いずれかの方向を示す明度勾配方向コードのみでテンプレート画像との比較をすることにより、対象物の種類ごとの特徴が認識特徴量に顕著に表れるので、精度の良い判断ができる。
第7発明によれば、対象物画像とテンプレート画像との認識特徴量の相関値を用いることにより、対象物画像をテンプレート画像にマッチングすることができ、対象物の種類を判断することができる。
第8発明によれば、対象物画像とテンプレート画像との認識特徴ベクトルの距離を用いることにより、対象物画像をテンプレート画像にマッチングすることができ、対象物の種類を判断することができる。
第9発明によれば、距離閾値を用いて対象物を未登録の種類と判断することにより、未登録の対象物を登録済みの種類と誤って判断することを防止することができる。
第10発明によれば、距離閾値を距離の標準偏差で定めるので、認識特徴量の揺らぎが大きい種類であっても、対象物が未登録の種類と判断されることを防ぐことができる。
第11発明によれば、平均化フィルタによりカメラで撮影した対象物画像を圧縮することで、後の処理を高速に行うことができる。また、各画素の明度を平均化することで、微小ノイズの除去ができる。
第12発明によれば、対象物を規則性のある明度分布で照らすことにより、対象物にマークが付されていない場合でも、明度勾配方向に規則性を持たせることができ、マークが無いことを判断することができる。
第13発明によれば、対象物を斜方から照らすことにより、例えば、布片に織り込まれたマークの凹凸に影を付けてマークを浮き出させることができる。そのため、布片に織り込まれたマークの識別を精度よく行うことができる。
第14発明によれば、明度勾配方向の分布を基にテンプレート画像との比較を行うので、特に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。そのため、布マークを十分な精度で認識し、布片の種類や表裏を識別することで、その結果を基に布片のハンドリング方法を決定することができる。
第15発明によれば、明度勾配方向の分布である認識特徴量を基にテンプレート画像との比較を行うので、特に、織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にある布片画像でも、そのノイズに惑わされることなく、精度の良い判断ができる。
第16発明によれば、明度勾配方向をコード化することにより、テンプレート画像との比較を容易に行うことができる。
第17発明によれば、明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を明度勾配無コードに割り当てるので、明度勾配演算ウィンドウ内にマークが付されていない場合に、ノイズの影響で明度勾配方向をいずれかの方向を示す明度勾配方向コードに割り当てることがなく、ノイズの影響を排除できるので、精度の良い判断ができる。
第18発明によれば、統計領域ごとの明度勾配方向コードの出現頻度を認識特徴量とするので、認識特徴量の要素数を少なくすることができ、広範囲にわたる対象物画像を用いたテンプレート画像との比較を、高速に行うことができる。
第19発明によれば、明度勾配無コードを除き、いずれかの方向を示す明度勾配方向コードのみでテンプレート画像との比較をすることにより、対象物の種類ごとの特徴が認識特徴量に顕著に表れるので、精度の良い判断ができる。
第20発明によれば、対象物画像とテンプレート画像との認識特徴量の相関値を用いることにより、対象物画像をテンプレート画像にマッチングすることができ、対象物の種類を判断することができる。
第21発明によれば、対象物画像とテンプレート画像との認識特徴ベクトルの距離を用いることにより、対象物画像をテンプレート画像にマッチングすることができ、対象物の種類を判断することができる。
第22発明によれば、距離閾値を用いて対象物を未登録の種類と判断することにより、未登録の対象物を登録済みの種類と誤って判断することを防止することができる。
第23発明によれば、距離閾値を距離の標準偏差で定めるので、認識特徴量の揺らぎが大きい種類であっても、対象物が未登録の種類と判断されることを防ぐことができる。
第24発明によれば、平均化フィルタによりカメラで撮影した対象物画像を圧縮することで、後の処理を高速に行うことができる。また、各画素の明度を平均化することで、微小ノイズの除去ができる。
【図面の簡単な説明】
【0010】
【図1】明度勾配演算ウィンドウの説明図である。
【図2】明度勾配演算ウィンドウの座標の定義の説明図であって、(A)は画素数Nが偶数の場合、(B)は画素数Nが奇数の場合である。
【図3】明度勾配方向コードの説明図である。
【図4】比較領域、統計領域、および明度勾配演算ウィンドウの説明図である。
【図5】統計領域ごとの度勾配方向コードの出現頻度のヒストグラムである。
【図6】認識特徴ベクトルの説明図である。
【図7】距離閾値の説明図である。
【図8】従来方法の試験結果であって、相関値の分布のグラフである。
【図9】本発明の正規化相関処理を用いた方法の試験結果であって、各組合せにおける相関値の表である。
【図10】自動投入装置の説明図である。
【図11】本発明の一実施形態に係るマーク読み取り装置のカメラ位置の説明図である。
【図12】同マーク読み取り装置の照明位置の説明図である。
【図13】代表的な布片画像である。
【図14】照明の明度分布の説明図である。
【図15】平均化フィルタの説明図である。
【発明を実施するための形態】
【0011】
つぎに、本発明の実施形態を図面に基づき説明する。
本発明の一実施形態に係るマーク読み取り装置は、例えば、図10に示すような自動投入装置Xに取り付けられる。
図10において、1は布片Tを取り込むための取上げロボット、2および3はコンベヤ、4は傾斜スライダ、5は布片Tを展開するための展開ロボット、6は排出コンベヤである。これら、取上げロボット1、傾斜スライダ4、展開ロボット5が協働し、コンベヤ2上に山積みされた布片Tを取り込み、これを1枚ずつ分離し、平たく展開をして、排出コンベヤ6でアイロナーや折畳み機等の次工程装置に投入する。
【0012】
マーク読み取り装置は、布片Tを撮影するカメラと、カメラに接続された画像処理装置と、布片Tを照らす照明とで構成されている。
図11に示すように、排出コンベヤ6の上方には、排出コンベヤ6上に平たく展開されて搬送される布片Tを撮影するカメラ11が設けられている。カメラ11としては、エリアセンサや、ラインセンサを用いることができる。カメラ11は図示しない画像処理装置に接続されており、カメラ11で撮影した布片Tの画像(以下、「布片画像」という。)を画像処理することができるようになっている。
なお、「布片」は特許請求の範囲に記載の「対象物」に相当し、「布片画像」は特許請求の範囲に記載の「対象物画像」に相当する。
【0013】
また、図12に示すように、排出コンベヤ6の近傍には、カメラ11の撮像位置を照らす蛍光灯等の照明12が設けられている。
ところで、布片Tに付されるマークの多くは、インクなどを用いた印刷ではなく、ジャガード織り等で布地に織り込まれたマークであり、マークと布地との間に色の差がない。そのため、一般に行われるように布片Tを真上から照らすと、マークと布地との明度の差がほとんどなくなり、マークを読み取ることが困難になる。
そこで、図12に示すように、照明12を撮像位置の横の低い位置に設置し、布片Tを斜方から照らすようにする。このようにすれば、図13に示すように、布片Tに織り込まれたマークの凹凸に影を付けてマークを浮き出させることができる。そのため、布片Tに織り込まれたマークの識別を精度よく行うことができる。
【0014】
また、図14に示すように、照明12は、布片Tの一方(図14における右側)が暗く、他方(図14における左側)にいくに従って明るくなるような、規則性のある明度分布で布片Tを照らすようにする。これは、明るく照らされた方(図14における左側)に照明12を設置することで容易に実現できる。
この効果については、後述する。
【0015】
なお、図12では、照明12をコンベヤ6の側方に設置したが、コンベヤ6の上方(図12において、布片Tを中心に照明12を水平面内で90°回転した位置)に設置するなど、撮像位置において布片Tを斜方から照らすことができれば、その設置位置は限定されない。また、線光源に限らず、点光源としてもよい。
さらに、図14に示すような一方向に明度が変化する明度分布に限らず、規則性さえあれば、どのような明度分布としてもよい。
【0016】
さらになお、マーク読み取り装置は自動投入装置X以外の他の装置に設けてもよく、その取り付け場所は限定されない。特に、折畳み仕上機、あるいは作業員による折畳みの前段階に設置すれば、マークを読み取って布片Tを種類ごとに分別したり、マークを表にして折畳んだりできるので好ましい。
【0017】
つぎに、上記マーク読み取り装置を用いた布マークの読み取り方法について説明する。
まず、自動投入装置Xの動作により、布片Tが排出コンベヤ6上に平たく展開されて搬送されると、カメラ11でその布片Tを撮影して、布片画像を得る。
図13に示すように、布片画像には布片Tの織り目により生じる細かい凹凸や、シワ等に起因するノイズが大量にあるので、そのノイズに惑わされることなく、布マークを読み取る必要がある。そこで、大きく次の2つのステップで布マークの読み取りを行う。
(1)平均化フィルタによる微小ノイズ成分の除去
(2)明度勾配方向を用いたテンプレート画像とのマッチング
ここで、テンプレート画像とは、あらかじめ画像処理装置に記憶された布片の種類、表裏のごとの標準的な布片画像のことである。カメラ11で撮影した布片画像をいずれかのテンプレート画像にマッチングさせることで、布片Tの種類、表裏を判断するのである。なお、特許請求の範囲に記載の「種類」とは、布片の種類だけでなく、表裏も含む概念である。
ステップ(2)におけるマッチング方法には次の2種類がある。
(2.1)正規化相関処理を用いた方法
(2.2)ベクトル間距離を用いた方法
以下、それぞれについて詳説する。
【0018】
(1)平均化フィルタによる微小ノイズ成分の除去
画像処理装置は、カメラ11で撮影した布片画像に平均化フィルタをかけることによって、布片画像を圧縮し、微小ノイズを除去する。ここで、平均化フィルタとは、周知の画像処理方法であって、画素数が減少し、微小ノイズが除去されることが知られている。
具体的には、図15に示すように、カメラ11で撮影した撮像画像を2×2画素単位に分割し、その4画素の明度の平均値を1画素の明度とすることにより、全体で1/4の画素数となる布片画像を得る。同様の処理を2回行うことで、全体で1/16の画素数である布片画像が得られる。
平均化フィルタにより布片画像を圧縮することで、後のステップ(2)の処理を高速に行うことができる。また、各画素の明度を平均化することで、微小ノイズの除去ができる。
【0019】
なお、上記では最終的に16画素の平均としたが、どの程度の平均化フィルタをかけるか、すなわち、撮像画像における何画素分を平均するかは、ステップ(2)におけるテンプレート画像とのマッチング精度や、処理速度が最適となるように決定すればよい。もちろん、マッチング精度や、処理速度によっては、平均化フィルタをかけなくてもよい。
また、上記のように、処理を2回に分けて行う以外にも、1回で処理を完了するようにしてもよい。
【0020】
(2)明度勾配方向を用いたテンプレート画像とのマッチング
つぎに、画像処理装置は、平均化フィルタ後の布片画像を用いて、テンプレート画像とのマッチングを行う。本発明では、布片画像のノイズの影響を排除するため、明度勾配方向をマッチングのために用いる。ここで、明度勾配方向とは、画像内において明度が明るく変化する方向を意味する。
まず、明度勾配方向の演算方法について説明する。
【0021】
図1に示すように、布片画像中に明度勾配演算ウィンドウWを設定し、その明度勾配演算ウィンドウW内の明度勾配方向を演算する。
明度勾配演算ウィンドウW内の中心座標を(u,v)とし、明度勾配演算ウィンドウWの幅を定める画素数をnとすると、明度勾配演算ウィンドウWは、座標(u−n,v−n)、(u+n,v−n)、(u−n,v+n)、(u+n,v+n)で囲まれた領域である。
ここで、明度勾配演算ウィンドウWは1辺の画素数Nが2以上の正方形であり、nは、
【数1】
で表される。
なお、図2に示すように、Nが偶数の場合(A)は、明度勾配演算ウィンドウWの中心座標(u,v)は、画素の境界の交点に相当し、その交点に隣接する画素が(u−1,v−1)、(u+1,v−1)、(u−1,v+1)、(u+1,v+1)と定義される。一方、Nが奇数の場合(B)は、明度勾配演算ウィンドウWの中心座標(u,v)は、一つの画素に相当し、その画素の四隅に隣接する画素が(u−1,v−1)、(u+1,v−1)、(u−1,v+1)、(u+1,v+1)と定義される。
【0022】
明度勾配演算ウィンドウW内の明度勾配方向θ(u,v)は、座標(u,v)の画素の明度をI(u,v)とすると、
【数2】
で表される。
このように、明度勾配方向は、明度勾配演算ウィンドウW内の画素の明度を用いた簡易な演算により定まるので、演算速度が速い。
【0023】
図1に示すように、本実施形態では明度勾配演算ウィンドウWを5×5画素としている。したがって、数1によれば、n=2である。
ただし、明度勾配演算ウィンドウWは任意の大きさとすることができる。しかし、小さすぎると明度勾配方向にノイズの影響が表れ、大きすぎると明度勾配方向に布マークによる明度変化を反映することができなくなる。そのため、テンプレート画像とのマッチング精度が最適となるように、明度勾配演算ウィンドウWの大きさを決定すればよい。
【0024】
数2で演算される明度勾配方向はラジアン角度であるため、このままでは後のマッチング処理が困難となる。そこで、明度勾配方向を所定方向範囲ごとにコード化する。
図3に示すように、明度勾配方向を8方向に分けて、それぞれ1〜8の明度勾配方向コードと定義する。したがって、π/4radごとの方向範囲に分けられている。明度勾配方向コード1は、−π/8〜+π/8radの範囲であり、明度勾配方向コード2以降は、π/4radずつずれている。例えば、明度勾配方向がx軸正方向であれば明度勾配方向コード1、y軸正方向であれば明度勾配方向コード3、x軸負方向であれば明度勾配方向コード5、y軸負方向であれば明度勾配方向コード7にそれぞれ割り当てられる。
【0025】
なお、上記では8方向に分けたが、より細かく分けてもよいし、より粗く分けてもよい。テンプレート画像とのマッチング精度が最適となるように、明度勾配方向コードの数を決定すればよい。
【0026】
また、明度勾配演算ウィンドウW内の明度勾配強度が、あらかじめ画像処理装置に記憶された明度勾配強度閾値を超えない場合には、明度勾配無コード9に割り当てる。ここで、明度勾配強度とは、明度の変化の大きさを示す値である。
明度勾配演算ウィンドウW内の明度勾強度m(u,v)は、
【数3】
で表される。
このように、明度勾強度は、明度勾配演算ウィンドウ内の画素の明度を用いた簡易な演算により定まるので、演算速度が速い。
【0027】
明度勾配演算ウィンドウW内に布マークが付されていない場合には、明度の変化があまりないので明度勾配強度が小さくなる。このような場合に、ノイズの影響で生じる明度勾配方向をいずれかの明度勾配方向コード1〜8に割り当てることをせず、明度勾配無コード9に割り当てる。その結果、ノイズの影響を排除できるので、精度の良い判断ができる。
明度勾配強度閾値は、布マークが付されていない場合に明度勾配無コード9に割り当てるように、最適な値に設定すればよい。
【0028】
以上ように、ラジアン角度で演算された明度勾配方向を、明度勾配方向コード1〜9に割り当てることにより、以後の処理が容易となる。
【0029】
テンプレート画像とのマッチング処理においては、布片画像中に複数の明度勾配演算ウィンドウWを設定し、それぞれの明度勾配演算ウィンドウW内の明度勾配方向コードを演算する。
具体的には、図4に示すように、布片画像中の布マークが付されていると予想される領域に75×50画素の比較領域Cを設定し、その比較領域Cを5×5の統計領域Sに分割する。このとき、統計領域Sは、15×10画素となる。
この統計領域S中に明度勾配演算ウィンドウWを複数設定し、それぞれの明度勾配演算ウィンドウW内の明度勾配方向コードを演算する。具体的には、まず、統計領域S中の左上に明度勾配演算ウィンドウWを設定し、この明度勾配演算ウィンドウW内の明度勾配方向と明度勾強度を演算し、明度勾配方向コードに割り当てる。その後、明度勾配演算ウィンドウWを1画素単位、もしくは数画素単位にシフトさせながら、各位置で明度勾配方向コードを演算していく。したがって、1画素単位にシフトした場合では、1統計領域当たり、66個の明度勾配方向コードが演算されることになる。
【0030】
図5に示すように、統計領域ごとの度勾配方向コードの出現頻度をヒストグラムにすると、1統計領域当たり9個の要素からなるヒストグラムが得られ、全25個の統計領域を合わせると、9×25=225個の要素からなるヒストグラムが得られる。この225要素の出現頻度を認識特徴量と定義する。以後の処理において、この認識特徴量を用いてテンプレート画像とのマッチングを行う。
統計領域ごとの明度勾配方向コードの出現頻度を認識特徴量とするので、各明度勾配演算ウィンドウW内の明度勾配方向コードを取り扱う場合に比べて要素数を少なくすることができ、広範囲にわたる布片画像を用いたテンプレート画像とのマッチングを、高速に行うことができる。
【0031】
なお、上記では、比較領域Cを75×50画素としたが、これより広くてもよいし、狭くてもよい。対象となる布片の布マークが比較領域Cの中に含まれるように設定すればよい。
また、上記では比較領域Cを5×5の統計領域Sに分割したが、これよりも多く分割してもよいし、少なく分割してもよい。多く分割した場合には、認識特徴量の要素数が多くなり、少なく分割した場合には、認識特徴量の要素数が少なくなる。テンプレート画像とのマッチング精度が最適となるように、分割数を決定すればよい。
【0032】
ところで、布片Tの種類、表裏を判断するには、あらかじめテンプレート画像を画像処理装置に記憶しておく必要がある。
そのため、あらかじめ、自動投入装置Xで取り扱う布片Tの種類、表裏ごとに布片画像を撮影し、それをテンプレート画像として、そのテンプレート画像ごとの認識特徴量を演算し、画像処理装置に記憶しておく。
なお、テンプレート画像自体はマッチング処理に用いないので、認識特徴量と、その認識特徴量に対応する布片の種類、表裏を、画像処理装置に記憶しておけばよい。
【0033】
また、布片が無地である場合には、通常、織り目により生じる細かい凹凸や、シワ等に起因するノイズにより、明度勾配方向コードがランダムに変わる。しかしながら、図14に示すように、照明12は、規則性のある明度分布で布片Tを照らすようにしているから、布片が無地であっても、明度勾配方向コードに規則性を持たせることができる。
したがって、無地の布片であってもテンプレート画像として記憶しておくことができ、対象とする布片Tが無地であるか判断することができる。
【0034】
(2.1)正規化相関処理を用いた方法
つぎに、布片画像とテンプレート画像とのマッチングを行う。まず、正規化相関処理を用いた方法について説明する。
布片画像から得られた認識特徴量と、各テンプレート画像の認識特徴量との相関値を順次演算していき、布片画像を相関値が一番大きいテンプレート画像にマッチングさせる。ここで、相関値の演算は、周知の正規化相関処理により演算することができる。
そして、布片Tが、マッチングしたテンプレート画像の種類、表裏であると判断する。
認識特徴量は、布片画像のノイズが排除されているので、相関値が高くなり、ノイズに惑わされることなく、精度の良い判断ができる。
【0035】
なお、相関値を演算するために用いる認識特徴量は、上記で演算した全ての要素(225要素)を用いてもよいし、明度勾配無コード9の出現頻度を除いた要素(200要素)を用いてもよい。
統計領域S内に布マークが付されていない場合、あるいは、統計領域S内の一部にのみ布マークが付されている場合は、他の明度勾配コード1〜8に比べて、明度勾配無コード9の出現頻度が高くなる。そこで、明度勾配無コード9の出現頻度を除き、明度勾配コード1〜8のみとすると、布片の種類、表裏ごとの特徴が認識特徴量に顕著に表れる。そのため、他種類のテンプレート画像との分離が容易となり、テンプレート画像とのマッチングを精度よく行うことができる。
【0036】
(2.2)ベクトル間距離を用いた方法
つぎに、ベクトル間距離を用いた方法について説明する。
本方法では、認識特徴量をその要素数の次元(225次元)のベクトル(以下、「認識特徴ベクトル」という。)として扱う。
図6に示すように、225次元の特徴空間を定めると、布片画像から得られた認識特徴ベクトルV0、およびテンプレート画像の認識特徴ベクトルVn、Vm、・・・は、その特徴空間におけるベクトルとして表される。
画像処理装置は、布片画像から得られた認識特徴ベクトルV0と、各テンプレート画像の認識特徴ベクトルVn、Vm、・・・との距離dを順次演算していき、布片画像をベクトル間距離dが一番近いテンプレート画像にマッチングさせる。
そして、布片Tが、マッチングしたテンプレート画像の種類、表裏であると判断する。
ここで、認識特徴ベクトルV0と、認識特徴ベクトルVnとの距離dは、
【数4】
で表される。ここで、Mはベクトルの次元の数であり、本実施形態の場合M=225である。また、V(i)は、i番目の要素の値を意味する。
認識特徴ベクトルは、布片画像のノイズが排除されているので、ノイズに惑わされることなく、精度の良い判断ができる。
【0037】
ところで、上記方法では、テンプレート画像として登録されていない未登録の布片Tの布片画像が供給されても、ベクトル間距離dが一番近いテンプレート画像にマッチングするため、誤った判断をしてしまう。
そこで図7に示すように、上記方法で認識特徴ベクトルV0と認識特徴ベクトルVnとの距離dを演算した後に、dが距離閾値lより大きければ、マッチングしないと判断する。最終的に、いずれのテンプレート画像にもマッチングしない場合に、布片Tを未登録の種類と判断するようにする。
このようにすれば、未登録の布片Tを登録済みの種類と誤って判断することを防止することができる。
【0038】
距離閾値lは、任意の定数としてもよいが、テンプレート画像ごとに定める方が好ましい。
そのためには、あらかじめテンプレート画像を画像処理装置に記憶する際に、同一種類、表裏の布片画像を複数枚(10枚程度)撮影しておき、それぞれの布片画像で得られる認識特徴量の要素ごとの平均値を、そのテンプレート画像の認識特徴量とする。そして、そのテンプレート画像の認識特徴量から得られる認識特徴ベクトルと、それぞれの布片画像の認識特徴量から得られる認識特徴ベクトルとの距離を演算し、その距離の標準偏差σを得ておく。この標準偏差σに定数kを掛けた値kσをそのテンプレート画像の距離閾値lとする。なお、定数kは未登録種類の判断が最適となるように決定すればよい。
布片の種類、表裏によっては、得られる認識特徴量の揺らぎが大きい場合があるが、このように、距離の標準偏差σで距離閾値lを定めれば、揺らぎの大きい種類、表裏であっても、布片Tが未登録の種類と判断されることを防ぐことができる。
【0039】
なお、認識特徴ベクトルは、上記で演算した全ての要素(225要素)を用いてもよいし、明度勾配無コード9の出現頻度を除いた要素(200要素)を用いてもよい。
この場合、布片の種類、表裏ごとの特徴が認識特徴ベクトルに顕著に表れるため、他種類のテンプレート画像との分離が容易となり、テンプレート画像とのマッチングを精度よく行うことができる。
【0040】
以上により得られた、画像処理装置による布片Tの種類、表裏の判断結果を基に、自動投入装置Xもしくは次工程装置における布片Tのハンドリング方法を決定することができる。
【0041】
(試験)
つぎに、本発明のマーク読み取り精度の試験について説明する。
(1)従来方法
まず、従来方法によるマーク読み取りの精度について説明する。従来方法は、正規化相関処理により、布片画像とテンプレート画像との相関値を演算し、布片を相関値の高いテンプレート画像の種類に分類する方法である。
試験は、あらかじめ、ある1種類のタオルの表面と裏面の布片画像をテンプレート画像として画像処理装置に記憶させておき、同一種類のタオルの表面を試験対象として、その試験対象の布片画像と各テンプレート画像との相関値を演算した。これを複数回試行した。
その結果、相関値の分布は図8に示すようになった。図8における実線で示すように、試験対象の布片画像(表面)と、同一種類の表面のテンプレート画像との相関値は、0.25〜0.5に分布した。すなわち、従来方法の場合、高い相関値が得られず十分な精度で識別することができないことが分かる。
また、図8における破線で示すように、試験対象の布片画像(表面)と、同一種類の裏面のテンプレート画像との相関値は、0.25〜0.45に分布した。すなわち、表面のテンプレート画像との相関値の分布との重なりが多いため、表裏の識別が不可能であることが分かる。
【0042】
(2)本発明の正規化相関処理を用いた方法
つぎに、本発明のステップ(2)において正規化相関処理を用いた場合のマーク読み取りの精度について説明する。
試験は、あらかじめ、5種類のタオルA〜Eの表裏の布片画像を10種類のテンプレート画像として画像処理装置に記憶させておき、同一の5種類のタオルA〜Eを順次試験対象として、その試験対象の布片画像と各テンプレート画像との相関値を演算した。すなわち、表裏あわせて10種類の布片画像と、10種類のテンプレート画像との100通りの組合せの相関値を演算した。布片画像の撮影は、1種類ごとに5回行い、それぞれについて相関値を演算した。
その結果、図9に示す表が得られた。表は、試験対象ごとに、各テンプレート画像との相関値が表されており、その相関値は、1つの組合せ毎に5回試行して得られた平均値である。
これによれば、同じ種類同士である対角線上(図9における太枠内)の相関値は十分高い値を示しており、それ以外の組み合わせの相関値は低い値であるので、布片の種類の判断が可能であることが分かる。
【0043】
(他の実施形態)
本発明に係るマーク読み取り装置は、上述の布マークに限らず、あらゆる対象物に印刷されたマーク、おるいは凹凸で形成されたマークの読み取りに用いることができる。この場合にも、布マークの識別の場合と同様に、マーク読み取り精度を高める効果が得られる。
【符号の説明】
【0044】
X 自動投入装置
T 布片
1 取上げロボット
2、3 コンベヤ
4 傾斜スライダ
5 展開ロボット
6 排出コンベヤ
11 カメラ
12 照明
W 明度勾配演算ウィンドウ
C 比較領域
S 統計領域
【特許請求の範囲】
【請求項1】
種類ごとに異なるマークが付された対象物を撮影するカメラと、該カメラで撮影した対象物画像を処理する画像処理装置とを備えるマーク読み取り装置であって、
前記画像処理装置は、
前記対象物画像中の複数箇所における明度勾配方向を演算し、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の明度勾配方向の分布に一番近似する明度勾配方向の分布を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものである
ことを特徴とするマーク読み取り装置。
【請求項2】
前記画像処理装置は、
前記対象物画像中に複数の明度勾配演算ウィンドウを設定し、
それぞれの前記明度勾配演算ウィンドウ内の明度勾配方向を演算し、
該明度勾配方向の分布を認識特徴量とし、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量と一番近似する認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものである
ことを特徴とする請求項1記載のマーク読み取り装置。
【請求項3】
前記画像処理装置は、
前記明度勾配方向を、所定方向範囲ごとにコード化した明度勾配方向コードに割り当て、
該明度勾配方向コードの分布を認識特徴量とするものである
ことを特徴とする請求項2記載のマーク読み取り装置。
【請求項4】
前記画像処理装置は、
それぞれの前記明度勾配演算ウィンドウ内の明度勾配強度を演算し、
あらかじめ記憶された明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を、前記明度勾配方向コードの一つである明度勾配無コードに割り当てるものである
ことを特徴とする請求項3記載のマーク読み取り装置。
【請求項5】
前記画像処理装置は、
前記対象物画像中に複数の統計領域を設定し、該統計領域中に複数の明度勾配演算ウィンドウを設定し、
前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とするものである
ことを特徴とする請求項3または4記載のマーク読み取り装置。
【請求項6】
前記画像処理装置は、
前記明度勾配無コードを除く、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とするものである
ことを特徴とする請求項5記載のマーク読み取り装置。
【請求項7】
前記画像処理装置は、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量との相関値が一番大きい認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものである
ことを特徴とする請求項3,4,5または6記載のマーク読み取り装置。
【請求項8】
前記画像処理装置は、
前記認識特徴量を特徴空間における認識特徴ベクトルとし、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴ベクトルとの距離が一番近い認識特徴ベクトルを有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものである
ことを特徴とする請求項3,4,5または6記載のマーク読み取り装置。
【請求項9】
前記画像処理装置は、
いずれの前記テンプレート画像の認識特徴ベクトルと前記対象物画像の認識特徴ベクトルとの距離も、あらかじめ記憶された距離閾値よりも遠い場合に、前記対象物を未登録の種類と判断するものである
ことを特徴とする請求項8記載のマーク読み取り装置。
【請求項10】
前記テンプレート画像の認識特徴ベクトルは、同一種類の複数の対象物画像の認識特徴ベクトルの平均値であり、
前記距離閾値は、前記テンプレート画像の認識特徴ベクトルと、同一種類の複数の対象物画像の認識特徴ベクトルとの距離の標準偏差に所定の定数を掛けた値である
ことを特徴とする請求項9記載のマーク読み取り装置。
【請求項11】
前記画像処理装置は、
前記カメラで撮影した対象物画像に平均化フィルタをかけるものである
ことを特徴とする請求項1,2,3,4,5,6,7,8,9または10記載のマーク読み取り装置。
【請求項12】
前記対象物を規則性のある明度分布で照らす照明を備える
ことを特徴とする請求項1,2,3,4,5,6,7,8,9,10または11記載のマーク読み取り装置。
【請求項13】
前記対象物を斜方から照らす照明を備える
ことを特徴とする請求項1,2,3,4,5,6,7,8,9,10,11または12記載のマーク読み取り装置。
【請求項14】
種類ごとに異なるマークが付された対象物をカメラで撮影して対象物画像を取得し、
前記対象物画像中の複数箇所における明度勾配方向を演算し、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の明度勾配方向の分布に一番近似する明度勾配方向の分布を有するテンプレート画像に対応する種類を、前記対象物の種類と判断する
ことを特徴とするマーク読み取り方法。
【請求項15】
前記対象物画像中に複数の明度勾配演算ウィンドウを設定し、
それぞれの前記明度勾配演算ウィンドウ内の明度勾配方向を演算し、
該明度勾配方向の分布を認識特徴量とし、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量と一番近似する認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断する
ことを特徴とする請求項14記載のマーク読み取り方法。
【請求項16】
前記明度勾配方向を、所定方向範囲ごとにコード化した明度勾配方向コードに割り当て、
該明度勾配方向コードの分布を認識特徴量とする
ことを特徴とする請求項15記載のマーク読み取り方法。
【請求項17】
それぞれの前記明度勾配演算ウィンドウ内の明度勾配強度を演算し、
あらかじめ記憶された明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を、前記明度勾配方向コードの一つである明度勾配無コードに割り当てる
ことを特徴とする請求項16記載のマーク読み取り方法。
【請求項18】
前記対象物画像中に複数の統計領域を設定し、該統計領域中に複数の明度勾配演算ウィンドウを設定し、
前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とする
ことを特徴とする請求項16または17記載のマーク読み取り方法。
【請求項19】
前記明度勾配無コードを除く、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とする
ことを特徴とする請求項18記載のマーク読み取り方法。
【請求項20】
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量との相関値が一番大きい認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断する
ことを特徴とする請求項16,17,18または19記載のマーク読み取り方法。
【請求項21】
前記認識特徴量を特徴空間における認識特徴ベクトルとし、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴ベクトルとの距離が一番近い認識特徴ベクトルを有するテンプレート画像に対応する種類を、前記対象物の種類と判断する
ことを特徴とする請求項16,17,18または19記載のマーク読み取り方法。
【請求項22】
いずれの前記テンプレート画像の認識特徴ベクトルと前記対象物画像の認識特徴ベクトルとの距離も、あらかじめ記憶された距離閾値よりも遠い場合に、前記対象物を未登録の種類と判断する
ことを特徴とする請求項21記載のマーク読み取り方法。
【請求項23】
前記テンプレート画像の認識特徴ベクトルは、同一種類の複数の対象物画像の認識特徴ベクトルの平均値であり、
前記距離閾値は、前記テンプレート画像の認識特徴ベクトルと、同一種類の複数の対象物画像の認識特徴ベクトルとの距離の標準偏差に所定の定数を掛けた値である
ことを特徴とする請求項22記載のマーク読み取り方法。
【請求項24】
前記カメラで撮影して取得した対象物画像に平均化フィルタをかける
ことを特徴とする請求項14,15,16,17,18,19,20,21,22または23記載のマーク読み取り方法。
【請求項1】
種類ごとに異なるマークが付された対象物を撮影するカメラと、該カメラで撮影した対象物画像を処理する画像処理装置とを備えるマーク読み取り装置であって、
前記画像処理装置は、
前記対象物画像中の複数箇所における明度勾配方向を演算し、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の明度勾配方向の分布に一番近似する明度勾配方向の分布を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものである
ことを特徴とするマーク読み取り装置。
【請求項2】
前記画像処理装置は、
前記対象物画像中に複数の明度勾配演算ウィンドウを設定し、
それぞれの前記明度勾配演算ウィンドウ内の明度勾配方向を演算し、
該明度勾配方向の分布を認識特徴量とし、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量と一番近似する認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものである
ことを特徴とする請求項1記載のマーク読み取り装置。
【請求項3】
前記画像処理装置は、
前記明度勾配方向を、所定方向範囲ごとにコード化した明度勾配方向コードに割り当て、
該明度勾配方向コードの分布を認識特徴量とするものである
ことを特徴とする請求項2記載のマーク読み取り装置。
【請求項4】
前記画像処理装置は、
それぞれの前記明度勾配演算ウィンドウ内の明度勾配強度を演算し、
あらかじめ記憶された明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を、前記明度勾配方向コードの一つである明度勾配無コードに割り当てるものである
ことを特徴とする請求項3記載のマーク読み取り装置。
【請求項5】
前記画像処理装置は、
前記対象物画像中に複数の統計領域を設定し、該統計領域中に複数の明度勾配演算ウィンドウを設定し、
前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とするものである
ことを特徴とする請求項3または4記載のマーク読み取り装置。
【請求項6】
前記画像処理装置は、
前記明度勾配無コードを除く、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とするものである
ことを特徴とする請求項5記載のマーク読み取り装置。
【請求項7】
前記画像処理装置は、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量との相関値が一番大きい認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものである
ことを特徴とする請求項3,4,5または6記載のマーク読み取り装置。
【請求項8】
前記画像処理装置は、
前記認識特徴量を特徴空間における認識特徴ベクトルとし、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴ベクトルとの距離が一番近い認識特徴ベクトルを有するテンプレート画像に対応する種類を、前記対象物の種類と判断するものである
ことを特徴とする請求項3,4,5または6記載のマーク読み取り装置。
【請求項9】
前記画像処理装置は、
いずれの前記テンプレート画像の認識特徴ベクトルと前記対象物画像の認識特徴ベクトルとの距離も、あらかじめ記憶された距離閾値よりも遠い場合に、前記対象物を未登録の種類と判断するものである
ことを特徴とする請求項8記載のマーク読み取り装置。
【請求項10】
前記テンプレート画像の認識特徴ベクトルは、同一種類の複数の対象物画像の認識特徴ベクトルの平均値であり、
前記距離閾値は、前記テンプレート画像の認識特徴ベクトルと、同一種類の複数の対象物画像の認識特徴ベクトルとの距離の標準偏差に所定の定数を掛けた値である
ことを特徴とする請求項9記載のマーク読み取り装置。
【請求項11】
前記画像処理装置は、
前記カメラで撮影した対象物画像に平均化フィルタをかけるものである
ことを特徴とする請求項1,2,3,4,5,6,7,8,9または10記載のマーク読み取り装置。
【請求項12】
前記対象物を規則性のある明度分布で照らす照明を備える
ことを特徴とする請求項1,2,3,4,5,6,7,8,9,10または11記載のマーク読み取り装置。
【請求項13】
前記対象物を斜方から照らす照明を備える
ことを特徴とする請求項1,2,3,4,5,6,7,8,9,10,11または12記載のマーク読み取り装置。
【請求項14】
種類ごとに異なるマークが付された対象物をカメラで撮影して対象物画像を取得し、
前記対象物画像中の複数箇所における明度勾配方向を演算し、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の明度勾配方向の分布に一番近似する明度勾配方向の分布を有するテンプレート画像に対応する種類を、前記対象物の種類と判断する
ことを特徴とするマーク読み取り方法。
【請求項15】
前記対象物画像中に複数の明度勾配演算ウィンドウを設定し、
それぞれの前記明度勾配演算ウィンドウ内の明度勾配方向を演算し、
該明度勾配方向の分布を認識特徴量とし、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量と一番近似する認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断する
ことを特徴とする請求項14記載のマーク読み取り方法。
【請求項16】
前記明度勾配方向を、所定方向範囲ごとにコード化した明度勾配方向コードに割り当て、
該明度勾配方向コードの分布を認識特徴量とする
ことを特徴とする請求項15記載のマーク読み取り方法。
【請求項17】
それぞれの前記明度勾配演算ウィンドウ内の明度勾配強度を演算し、
あらかじめ記憶された明度勾配強度閾値を超えない明度勾配強度を有する明度勾配演算ウィンドウ内の明度勾配方向を、前記明度勾配方向コードの一つである明度勾配無コードに割り当てる
ことを特徴とする請求項16記載のマーク読み取り方法。
【請求項18】
前記対象物画像中に複数の統計領域を設定し、該統計領域中に複数の明度勾配演算ウィンドウを設定し、
前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とする
ことを特徴とする請求項16または17記載のマーク読み取り方法。
【請求項19】
前記明度勾配無コードを除く、前記統計領域ごとの前記明度勾配方向コードの出現頻度を認識特徴量とする
ことを特徴とする請求項18記載のマーク読み取り方法。
【請求項20】
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴量との相関値が一番大きい認識特徴量を有するテンプレート画像に対応する種類を、前記対象物の種類と判断する
ことを特徴とする請求項16,17,18または19記載のマーク読み取り方法。
【請求項21】
前記認識特徴量を特徴空間における認識特徴ベクトルとし、
あらかじめ記憶された複数種類のテンプレート画像のうち、前記対象物画像の認識特徴ベクトルとの距離が一番近い認識特徴ベクトルを有するテンプレート画像に対応する種類を、前記対象物の種類と判断する
ことを特徴とする請求項16,17,18または19記載のマーク読み取り方法。
【請求項22】
いずれの前記テンプレート画像の認識特徴ベクトルと前記対象物画像の認識特徴ベクトルとの距離も、あらかじめ記憶された距離閾値よりも遠い場合に、前記対象物を未登録の種類と判断する
ことを特徴とする請求項21記載のマーク読み取り方法。
【請求項23】
前記テンプレート画像の認識特徴ベクトルは、同一種類の複数の対象物画像の認識特徴ベクトルの平均値であり、
前記距離閾値は、前記テンプレート画像の認識特徴ベクトルと、同一種類の複数の対象物画像の認識特徴ベクトルとの距離の標準偏差に所定の定数を掛けた値である
ことを特徴とする請求項22記載のマーク読み取り方法。
【請求項24】
前記カメラで撮影して取得した対象物画像に平均化フィルタをかける
ことを特徴とする請求項14,15,16,17,18,19,20,21,22または23記載のマーク読み取り方法。
【図1】

【図2】
【図3】

【図4】

【図5】

【図6】
【図7】

【図8】
【図9】

【図11】

【図12】
【図15】
【図10】

【図13】

【図14】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図15】
【図10】
【図13】
【図14】
【公開番号】特開2012−22518(P2012−22518A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−159827(P2010−159827)
【出願日】平成22年7月14日(2010.7.14)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成18から22年度、独立行政法人 新エネルギー・産業技術総合開発機構、戦略的先端ロボット要素技術開発 プロジェクト委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(502407130)株式会社プレックス (75)
【出願人】(304028346)国立大学法人 香川大学 (285)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月14日(2010.7.14)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成18から22年度、独立行政法人 新エネルギー・産業技術総合開発機構、戦略的先端ロボット要素技術開発 プロジェクト委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(502407130)株式会社プレックス (75)
【出願人】(304028346)国立大学法人 香川大学 (285)
【Fターム(参考)】
[ Back to top ]