
ミクロ−マクロハイブリッド他車両制御モデル式運転シミュレータ
【課題】
運転シミュレータを用いて運転能力を測定する際、意図した状況課題を速やかに作り出す必要があるとともに、被験者には課題として意図した情報のみにより選択を行わせ、それ以外の手段で被験者に正答を予期させてはならない。しかし、既存の運転シミュレータは、周囲の車両を時系列に従った座標値データで制御するため、動作がワンパターンなことが問題であり、またこれを改善するミクロ交通流モデルで他の車両を制御させるものでは、車両の配置をマクロ的に制御できず、課題として意図した状況を速やかに作り出すことが困難な問題がある。
【解決手段】
周囲の車両をミクロ交通流モデルのひとつである追従モデルで制御することにより車両の動きのワンパターン化を防ぎ、かつ車両の配置に応じてマクロ的に追従モデルのパラメータを随時調節することにより、課題の状況を速やかに作り出すことを可能とする。
運転シミュレータを用いて運転能力を測定する際、意図した状況課題を速やかに作り出す必要があるとともに、被験者には課題として意図した情報のみにより選択を行わせ、それ以外の手段で被験者に正答を予期させてはならない。しかし、既存の運転シミュレータは、周囲の車両を時系列に従った座標値データで制御するため、動作がワンパターンなことが問題であり、またこれを改善するミクロ交通流モデルで他の車両を制御させるものでは、車両の配置をマクロ的に制御できず、課題として意図した状況を速やかに作り出すことが困難な問題がある。
【解決手段】
周囲の車両をミクロ交通流モデルのひとつである追従モデルで制御することにより車両の動きのワンパターン化を防ぎ、かつ車両の配置に応じてマクロ的に追従モデルのパラメータを随時調節することにより、課題の状況を速やかに作り出すことを可能とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転シミュレータに係り、特に走行場面中に周囲の登場する車両等の制御方式に関する。
【背景技術】
【0002】
運転シミュレータは、運転者の前方に設置したスクリーンに、運転席から見た映像をコンピュータグラフィックスで映写し、自動車を模擬したハンドル、アクセル、ブレーキ等の操縦装置の操作に連動させて映像を制御することにより、室内において実際の道路での走行を模擬した視覚・聴覚および装置によっては加速度や振動等の体感を模擬的に運転者に提示する装置である。これにより、仮想的な空間の中で仮に事故を起こしたとしても身体的な傷害を受けることなく、かつ再現的に実施することができるため、実際の車では困難な走行も可能となる。
【0003】
上記した運転シミュレータを用いた運転能力の測定は、実際の運転状況に近い映像や操作デバイスを用いて評価できるほか、実際の運転中には滅多に起こらない状況であっても選択的にあるいは繰り返し発生させることが可能であることから、検査、トレーニング、実験等で、課題を効率よく実施するために工夫できる自由度が高い。さらには、コンピュータグラフィックスによる仮想空間であることから衝突しても安全であり、なおかつ課題が多数の車両等が関係するような状況であっても、例えばその数に応じた車両やテストドライバーを用意する必要はないなど、課題の設定が自由に行えることに加え、課題が複雑化しても費用への影響が少ないことにおいて、実車よりも優れている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
運転シミュレータで運転能力の測定を行う場合、意図した課題の状況を速やかに作り出す必要があると同時に、課題の意図として被験者に選択の判断材料として与えた情報とは別の手段によって、被験者に正答の予期を許すようなものは望ましくない。例えば、課題を提示する以前に正答を知られてしまうような検査やトレーニングでは、具合が悪い。しかし、現在、一般的な運転シミュレータの多くは、周囲の車両の動き方について座標値の時系列データとして予め指定し、自車両がある領域に入ることをきっかけにして他の車両の動作を開始させるものであり、その場合、それらの他車両は動作を開始した後は決まった動きしかしないことから、意図した課題の状況が正確に作り出すことができる反面、状況がワンパターンになりがちである。仮にワンパターンな運転シミュレータを用いて検査を行った場合、過去に同一課題の経験があるならば、該被験者にとり正答の予期が可能となる問題が生じる。
【0005】
また、他車両の動きが予め決められていることにより、被験者がシステムの想定した範囲から外れた運転を行った際に動作に支障を来たす可能性があり、またそれを回避するために、運転特性に個人差のある全ての被験者に対応可能なデータセットを持つようなシステム設計を行うことも容易ではない。
【0006】
ところで、交通流シミュレータの方式には、大きく車両を空間内の密度で表現するマクロモデルと、1台1台の車両の挙動を演算するミクロモデルとがあり、一部の運転シミュレータには、交通流シミュレータの技術を融合させて、ミクロ交通流モデルによって他の車両を制御する機構を持つものもある(例えば、特許文献1を参照。)。その場合、被験者が多少システムの想定外の運転をしても、システムは随時それに合わせて他車両の次の動きを新たに決定することから、走り方に個人差のある被験者にも柔軟に対応できる。
【0007】
しかし、この方式ではミクロ交通流モデルに従ってそれぞれの他車両が個々別々に動作を決定することから、例えば課題の意図により、被験者の右側には車が居て左側には車が居ないといった状況を作り出したいといった場合に、こういった車両の配置を大局的に見たマクロ的な制御ができない。そのため、この方式では意図したとおりの状況を速やかに作り出すことが困難であり、意図的な車両配置等を提示して実施する課題による検査等の用途での使用は非効率的である。
【0008】
【特許文献1】特開2007−72224号公報
【課題を解決するための手段】
【0009】
以上の課題を解決するため、周囲の車両をミクロ交通流モデルのひとつである追従モデルで制御することにより車両の動きのワンパターン化を防ぐとともに、マクロ的に追従モデルへの介入を行う手法を考案した。
【0010】
追従モデルは、当該車両の速度、当該車両の先行車両との車間距離、先行車両の速度等に応じて当該車両の挙動を決定するもので、例えばこれらの変数等で構成した関数により、目標とする車間距離を決定し、それを達成するための加速度を割り出してそれぞれの車両が加速するか減速するかといった決定を行う。この方式では、予め座標値の時系列データを与えた場合に決まった動きしかせずワンパターンであることとは対照的に、各車両に自然かつ臨機応変な振る舞いをさせることが可能になることから、実現される状況が多様になり、周囲の車両の配置から取るべき行動を判断させる能力測定に使用した場合は、動作がワンパターンな場合には可能であった正答の予測も困難にすることができる。
【0011】
上記の追従モデルで目標とする車間距離や加減速の決定に用いる関数は、速度や車間距離といった計測による変数と、システムの設計者が任意に設定する、それぞれの変数に掛けられる係数等のパラメータで構成され、採用する関数式およびパラメータの値により、他車両の挙動の特性が変化する。
【0012】
他車両の仮想的な運転者の個人差の表現は、それらのパラメータにばらつきを持たせることにより既存技術でも可能であるが、通常はこのパラメータは終始固定されているため、意図通りの車両配置等の状況を作り出すことには機能しない。
【0013】
そこで、さらにマクロ的な車両の配置に応じて関数中のパラメータの調節、もしくは関数式そのものの切り替えを動的に行う機構を追加することで、意図通りの状況を速やかに作り出すことが困難である問題を解決する。
【0014】
上記したマクロ的な介入についての具体例としては、密度を高くしたい道路区間ではそこに位置する車両の車間距離が狭くなるように、逆に設定車両の密度を低くしたい道路区間では車間距離が広くなるように、さらに車両を排除したい道路区間に対しては、その上流に位置する直近の車両の車間距離を無限大にする、といった設定の変更を動的に行う手法が挙げられる。
【0015】
この他に、映像上は表示されず、かつ衝突等の判定においては無視される物体(例えば透明な車両)を随時配置し、他車両の位置の更新処理時にのみその物体を参加させることによって、より直接的に特定の道路区間の車両を任意に排除する手法も可能である。
【発明の効果】
【0016】
本発明により、他車両の動きを予め座標値の時系列データで用意した従来の一般的な運転シミュレータにおける、状況がワンパターンになる問題とおよび被験者の想定外の運転に柔軟に対応できない問題、並びに他車両をミクロ交通流モデルで制御する運転シミュレータにおける、課題として意図した状況を速やかに作り出すことが困難な問題が解決され、自然で柔軟性のある他車両の制御と、課題の効率的な実施が両立できる。
【0017】
よって、本発明の運転シミュレータを用いた運転能力の測定手法を実用化することにより、より高度で効率のよい検査、トレーニング、実験等の実施が可能となる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の実施の形態を図1〜図6に基づいて説明する。
【0019】
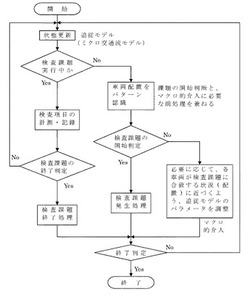
図1は、本発明の運転シミュレータで能力測定を行う際に、課題の実施に関する基本的な処理の流れに、課題を開始できる状況に効率よく誘導するための、追従モデルのパラメータをマクロ的に調整する機構を付加したフローチャートの一例を示したものである。課題実行時以外は、随時マクロ的な介入によって検査課題に合致する状況に近付くようにパラメータの調整された追従モデルにより状態更新を行うため、マクロ的な介入を行わない場合よりも効率よく課題の状況を作り出すことができる。なお、マクロ的な介入の実施が異なる位置であっても、本発明の運転シミュレータは実現できる。
【実施例】
【0020】
本発明で提案する、他車両を追従モデルで制御し、それをさらにマクロ的に介入を行うことが有効な実施例として、図2、3に示すように、前方の風景とミラーに写った風景を表示する運転シミュレータで、周囲に多数の車両が走行する場面において、図4〜6に例示する、周囲の車の配置を注意して障害物を回避する判断を行う課題が挙げられる。
【0021】
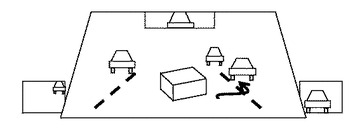
この場合、被験者の正解の回避方法として、右側の車線に車線変更するか、左側の車線に車線変更するか、もしくは障害物の手前で停止するか等といった選択肢があり、これを制御するためには、左側の車線のみに他車両が居て右側が開いている状態、右側の車線のみに他車両が居て左側が開いている状態、両方の車線にそれぞれ他車両が居る状態を任意にさりげなく作り出して、そのタイミングを見計らって障害物を出現させる必要がある。本発明は他車両の車間距離等をマクロ的かつ動的に操作することにより、任意の道路区間について他車両の存在確率の制御を行い、正解の回避方法を自然かつ効率良く切り替えて課題を実施する手段として利用できる。
【図面の簡単な説明】
【0022】
【図1】本発明において、課題の実施に関する一連の処理に対する追従モデルのパラメータ調整機構の付加位置の一例を示したフローチャート。
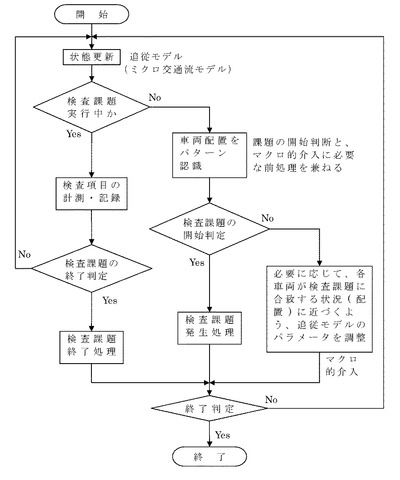
【図2】本発明の実施形態に例を挙げる運転シミュレータの模式図。
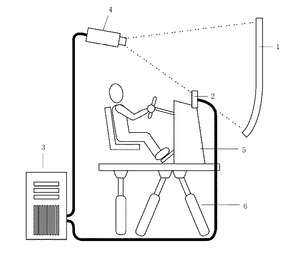
【図3】図2に示した運転シミュレータを運転席の右斜め後方から見た様子。
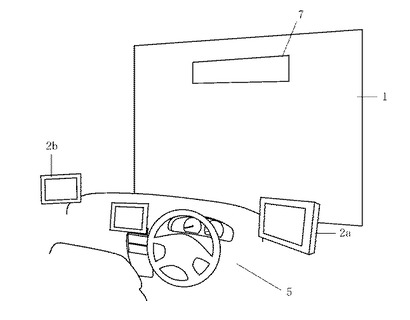
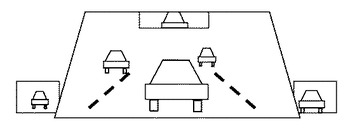
【図4】通常の走行時の様子について前方および各ミラーの表示を模式的に示した図。
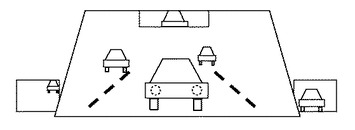
【図5】図4の状態に引き続いて、課題開始時の様子について前方および各ミラーの表示を模式的に示した図。先行車両のブレーキランプが点灯している。本図の例では、本発明により、左側の車線の真横から後方にかけての他車両に対し、車間距離を広げさせて当該道路区間の車両密度が低下させた状態。
【図6】図5の状態に引き続いて、課題実行時の様子について前方および各ミラーの表示を模式的に示した図。先行車両が左右どちらか(本図の例では右側)に車線変更した陰から障害物が現れ、被験者も自分の周りの車の配置を確認して回避方法を判断し、回避を実行する。本図の例では、左側の車線が広く空いているので、左側に車線変更して回避することが、この課題の正答となる。
【符号の説明】
【0023】
1 運転席の前方を模した映像を映写するためのスクリーン。
2 ドアミラーを模した映像を表示するための小型液晶モニタ。図2中の2-a 、2-bの様に左右それぞれに設置する。
3 映像生成用コンピュータ。
4 1のスクリーンに映写するためのプロジェクタ。
5 運転台。ハンドルやアクセル、ブレーキ等自動車を模擬した操作入力デバイスを備える。
6 動揺装置。加速度を体感させる機構を持たない運転シミュレータの場合は省略される。
7 ルームミラーを模した映像を表示する領域。本実施例では1のスクリーンに映写する前方映像中に3の映像生成用コンピュータで予めはめ込み処理を行う。
【技術分野】
【0001】
本発明は、運転シミュレータに係り、特に走行場面中に周囲の登場する車両等の制御方式に関する。
【背景技術】
【0002】
運転シミュレータは、運転者の前方に設置したスクリーンに、運転席から見た映像をコンピュータグラフィックスで映写し、自動車を模擬したハンドル、アクセル、ブレーキ等の操縦装置の操作に連動させて映像を制御することにより、室内において実際の道路での走行を模擬した視覚・聴覚および装置によっては加速度や振動等の体感を模擬的に運転者に提示する装置である。これにより、仮想的な空間の中で仮に事故を起こしたとしても身体的な傷害を受けることなく、かつ再現的に実施することができるため、実際の車では困難な走行も可能となる。
【0003】
上記した運転シミュレータを用いた運転能力の測定は、実際の運転状況に近い映像や操作デバイスを用いて評価できるほか、実際の運転中には滅多に起こらない状況であっても選択的にあるいは繰り返し発生させることが可能であることから、検査、トレーニング、実験等で、課題を効率よく実施するために工夫できる自由度が高い。さらには、コンピュータグラフィックスによる仮想空間であることから衝突しても安全であり、なおかつ課題が多数の車両等が関係するような状況であっても、例えばその数に応じた車両やテストドライバーを用意する必要はないなど、課題の設定が自由に行えることに加え、課題が複雑化しても費用への影響が少ないことにおいて、実車よりも優れている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
運転シミュレータで運転能力の測定を行う場合、意図した課題の状況を速やかに作り出す必要があると同時に、課題の意図として被験者に選択の判断材料として与えた情報とは別の手段によって、被験者に正答の予期を許すようなものは望ましくない。例えば、課題を提示する以前に正答を知られてしまうような検査やトレーニングでは、具合が悪い。しかし、現在、一般的な運転シミュレータの多くは、周囲の車両の動き方について座標値の時系列データとして予め指定し、自車両がある領域に入ることをきっかけにして他の車両の動作を開始させるものであり、その場合、それらの他車両は動作を開始した後は決まった動きしかしないことから、意図した課題の状況が正確に作り出すことができる反面、状況がワンパターンになりがちである。仮にワンパターンな運転シミュレータを用いて検査を行った場合、過去に同一課題の経験があるならば、該被験者にとり正答の予期が可能となる問題が生じる。
【0005】
また、他車両の動きが予め決められていることにより、被験者がシステムの想定した範囲から外れた運転を行った際に動作に支障を来たす可能性があり、またそれを回避するために、運転特性に個人差のある全ての被験者に対応可能なデータセットを持つようなシステム設計を行うことも容易ではない。
【0006】
ところで、交通流シミュレータの方式には、大きく車両を空間内の密度で表現するマクロモデルと、1台1台の車両の挙動を演算するミクロモデルとがあり、一部の運転シミュレータには、交通流シミュレータの技術を融合させて、ミクロ交通流モデルによって他の車両を制御する機構を持つものもある(例えば、特許文献1を参照。)。その場合、被験者が多少システムの想定外の運転をしても、システムは随時それに合わせて他車両の次の動きを新たに決定することから、走り方に個人差のある被験者にも柔軟に対応できる。
【0007】
しかし、この方式ではミクロ交通流モデルに従ってそれぞれの他車両が個々別々に動作を決定することから、例えば課題の意図により、被験者の右側には車が居て左側には車が居ないといった状況を作り出したいといった場合に、こういった車両の配置を大局的に見たマクロ的な制御ができない。そのため、この方式では意図したとおりの状況を速やかに作り出すことが困難であり、意図的な車両配置等を提示して実施する課題による検査等の用途での使用は非効率的である。
【0008】
【特許文献1】特開2007−72224号公報
【課題を解決するための手段】
【0009】
以上の課題を解決するため、周囲の車両をミクロ交通流モデルのひとつである追従モデルで制御することにより車両の動きのワンパターン化を防ぐとともに、マクロ的に追従モデルへの介入を行う手法を考案した。
【0010】
追従モデルは、当該車両の速度、当該車両の先行車両との車間距離、先行車両の速度等に応じて当該車両の挙動を決定するもので、例えばこれらの変数等で構成した関数により、目標とする車間距離を決定し、それを達成するための加速度を割り出してそれぞれの車両が加速するか減速するかといった決定を行う。この方式では、予め座標値の時系列データを与えた場合に決まった動きしかせずワンパターンであることとは対照的に、各車両に自然かつ臨機応変な振る舞いをさせることが可能になることから、実現される状況が多様になり、周囲の車両の配置から取るべき行動を判断させる能力測定に使用した場合は、動作がワンパターンな場合には可能であった正答の予測も困難にすることができる。
【0011】
上記の追従モデルで目標とする車間距離や加減速の決定に用いる関数は、速度や車間距離といった計測による変数と、システムの設計者が任意に設定する、それぞれの変数に掛けられる係数等のパラメータで構成され、採用する関数式およびパラメータの値により、他車両の挙動の特性が変化する。
【0012】
他車両の仮想的な運転者の個人差の表現は、それらのパラメータにばらつきを持たせることにより既存技術でも可能であるが、通常はこのパラメータは終始固定されているため、意図通りの車両配置等の状況を作り出すことには機能しない。
【0013】
そこで、さらにマクロ的な車両の配置に応じて関数中のパラメータの調節、もしくは関数式そのものの切り替えを動的に行う機構を追加することで、意図通りの状況を速やかに作り出すことが困難である問題を解決する。
【0014】
上記したマクロ的な介入についての具体例としては、密度を高くしたい道路区間ではそこに位置する車両の車間距離が狭くなるように、逆に設定車両の密度を低くしたい道路区間では車間距離が広くなるように、さらに車両を排除したい道路区間に対しては、その上流に位置する直近の車両の車間距離を無限大にする、といった設定の変更を動的に行う手法が挙げられる。
【0015】
この他に、映像上は表示されず、かつ衝突等の判定においては無視される物体(例えば透明な車両)を随時配置し、他車両の位置の更新処理時にのみその物体を参加させることによって、より直接的に特定の道路区間の車両を任意に排除する手法も可能である。
【発明の効果】
【0016】
本発明により、他車両の動きを予め座標値の時系列データで用意した従来の一般的な運転シミュレータにおける、状況がワンパターンになる問題とおよび被験者の想定外の運転に柔軟に対応できない問題、並びに他車両をミクロ交通流モデルで制御する運転シミュレータにおける、課題として意図した状況を速やかに作り出すことが困難な問題が解決され、自然で柔軟性のある他車両の制御と、課題の効率的な実施が両立できる。
【0017】
よって、本発明の運転シミュレータを用いた運転能力の測定手法を実用化することにより、より高度で効率のよい検査、トレーニング、実験等の実施が可能となる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の実施の形態を図1〜図6に基づいて説明する。
【0019】
図1は、本発明の運転シミュレータで能力測定を行う際に、課題の実施に関する基本的な処理の流れに、課題を開始できる状況に効率よく誘導するための、追従モデルのパラメータをマクロ的に調整する機構を付加したフローチャートの一例を示したものである。課題実行時以外は、随時マクロ的な介入によって検査課題に合致する状況に近付くようにパラメータの調整された追従モデルにより状態更新を行うため、マクロ的な介入を行わない場合よりも効率よく課題の状況を作り出すことができる。なお、マクロ的な介入の実施が異なる位置であっても、本発明の運転シミュレータは実現できる。
【実施例】
【0020】
本発明で提案する、他車両を追従モデルで制御し、それをさらにマクロ的に介入を行うことが有効な実施例として、図2、3に示すように、前方の風景とミラーに写った風景を表示する運転シミュレータで、周囲に多数の車両が走行する場面において、図4〜6に例示する、周囲の車の配置を注意して障害物を回避する判断を行う課題が挙げられる。
【0021】
この場合、被験者の正解の回避方法として、右側の車線に車線変更するか、左側の車線に車線変更するか、もしくは障害物の手前で停止するか等といった選択肢があり、これを制御するためには、左側の車線のみに他車両が居て右側が開いている状態、右側の車線のみに他車両が居て左側が開いている状態、両方の車線にそれぞれ他車両が居る状態を任意にさりげなく作り出して、そのタイミングを見計らって障害物を出現させる必要がある。本発明は他車両の車間距離等をマクロ的かつ動的に操作することにより、任意の道路区間について他車両の存在確率の制御を行い、正解の回避方法を自然かつ効率良く切り替えて課題を実施する手段として利用できる。
【図面の簡単な説明】
【0022】
【図1】本発明において、課題の実施に関する一連の処理に対する追従モデルのパラメータ調整機構の付加位置の一例を示したフローチャート。
【図2】本発明の実施形態に例を挙げる運転シミュレータの模式図。
【図3】図2に示した運転シミュレータを運転席の右斜め後方から見た様子。
【図4】通常の走行時の様子について前方および各ミラーの表示を模式的に示した図。
【図5】図4の状態に引き続いて、課題開始時の様子について前方および各ミラーの表示を模式的に示した図。先行車両のブレーキランプが点灯している。本図の例では、本発明により、左側の車線の真横から後方にかけての他車両に対し、車間距離を広げさせて当該道路区間の車両密度が低下させた状態。
【図6】図5の状態に引き続いて、課題実行時の様子について前方および各ミラーの表示を模式的に示した図。先行車両が左右どちらか(本図の例では右側)に車線変更した陰から障害物が現れ、被験者も自分の周りの車の配置を確認して回避方法を判断し、回避を実行する。本図の例では、左側の車線が広く空いているので、左側に車線変更して回避することが、この課題の正答となる。
【符号の説明】
【0023】
1 運転席の前方を模した映像を映写するためのスクリーン。
2 ドアミラーを模した映像を表示するための小型液晶モニタ。図2中の2-a 、2-bの様に左右それぞれに設置する。
3 映像生成用コンピュータ。
4 1のスクリーンに映写するためのプロジェクタ。
5 運転台。ハンドルやアクセル、ブレーキ等自動車を模擬した操作入力デバイスを備える。
6 動揺装置。加速度を体感させる機構を持たない運転シミュレータの場合は省略される。
7 ルームミラーを模した映像を表示する領域。本実施例では1のスクリーンに映写する前方映像中に3の映像生成用コンピュータで予めはめ込み処理を行う。
【特許請求の範囲】
【請求項1】
他車両の制御に追従モデルを採用した運転シミュレータに対し、モデルのパラメータをマクロ的な車両の配置に応じて動的に調節する制御を付加することにより、課題の意図どおりの車両の配置状況を速やかに作り出すことを可能とした運転シミュレータ。
【請求項2】
請求項1の運転シミュレータにおいて、映像上は表示されず、かつ衝突等の判定において無視される物体(例えば透明な車両)を配置し、他車両の位置の更新処理時のみその物体を参加させて、任意の道路区間の車両を排除する制御手法。
【請求項1】
他車両の制御に追従モデルを採用した運転シミュレータに対し、モデルのパラメータをマクロ的な車両の配置に応じて動的に調節する制御を付加することにより、課題の意図どおりの車両の配置状況を速やかに作り出すことを可能とした運転シミュレータ。
【請求項2】
請求項1の運転シミュレータにおいて、映像上は表示されず、かつ衝突等の判定において無視される物体(例えば透明な車両)を配置し、他車両の位置の更新処理時のみその物体を参加させて、任意の道路区間の車両を排除する制御手法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−122475(P2010−122475A)
【公開日】平成22年6月3日(2010.6.3)
【国際特許分類】
【出願番号】特願2008−296219(P2008−296219)
【出願日】平成20年11月20日(2008.11.20)
【出願人】(592083915)警察庁科学警察研究所長 (23)
【公開日】平成22年6月3日(2010.6.3)
【国際特許分類】
【出願日】平成20年11月20日(2008.11.20)
【出願人】(592083915)警察庁科学警察研究所長 (23)
[ Back to top ]