
ミスト飛散防止フード装置及び該装置の移動方法
【課題】塗装面の間隔を一定に保つことが可能で、塗装ミストの飛散防止効果を高く維持することができるミスト飛散防止フード装置及び該装置の移動方法を提案する。
【解決手段】塗装面50に対向する前面が開放し、該前面が塗装面50に対して間隙を存して平行に配置される筐体状のフード本体2を備えたミスト飛散防止フード装置1において、フード本体1にアーム3を介してスライド機構10が取り付けられ、該スライド機構10は、フード本体2を塗装面50に平行にスライド移動させるスライドレール4と、該スライドレール11に複数設けられ、負圧吸引手段で吸引されて塗装面50に吸着する吸盤12とを備え、塗装面50に吸盤12を吸着させスライドレール11を固定した状態で、塗装面50との間に一定間隙を存してフード本体2がスライドレール11上をスライド移動するようにした。
【解決手段】塗装面50に対向する前面が開放し、該前面が塗装面50に対して間隙を存して平行に配置される筐体状のフード本体2を備えたミスト飛散防止フード装置1において、フード本体1にアーム3を介してスライド機構10が取り付けられ、該スライド機構10は、フード本体2を塗装面50に平行にスライド移動させるスライドレール4と、該スライドレール11に複数設けられ、負圧吸引手段で吸引されて塗装面50に吸着する吸盤12とを備え、塗装面50に吸盤12を吸着させスライドレール11を固定した状態で、塗装面50との間に一定間隙を存してフード本体2がスライドレール11上をスライド移動するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、大型構造物の塗装時に、噴射した塗料ミストが周囲に飛散することを防止するミスト飛散防止フード装置及び該装置の移動方法に関する。
【背景技術】
【0002】
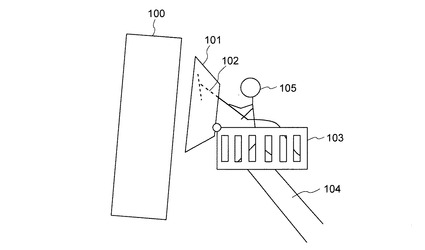
従来、船舶や建造物等の大型構造物の壁面塗装においては、スプレーガン式塗装方法が多く用いられている。スプレーガン式塗装方法では、塗料を噴射するスプレーガンにより壁面を塗装する方法であるが、特に大型構造物に適用する場合には、図8に示すようにクレーン104により移動可能な作業台103に作業員105が乗り、長尺のポールガン102から塗料を噴射しながらこれを上下あるいは左右に大きく振って大面積の塗装面100を塗装していた。このとき、ポールガン102から塗料を噴射する際に塗装ミストが発生し、この塗装ミストは周囲に飛散して作業員が吸い込んでしまったり、周辺の機器に付着してしまうことがあり、特に屋外で塗装を行う場合には風によって広範囲に拡散してしまう惧れがあった。
そこで、塗装ミストの飛散を防止するために、作業台103の先端にフード101を設置し、塗装面100をフード101で覆って塗装ミストの飛散を軽減するとともに、フード背面にファンを取り付けて、捕集した塗装ミストを吸引するようにしていた。
【0003】
しかし、フードは作業台103のような自走式足場に設置しているため、自走式足場自体の揺れによりフード101と塗装面100との間隔を一定に保つことが難しかった。そこで、従来はフード101と塗装面100の接触を避けるため、フード101と塗装面100との間隔を多く取るようにしていたが、これによりフード101のミスト飛散防止効果が低下してしまうという問題を抱えていた。
また、特許文献1(特開昭59−154176号公報)及び特許文献2(特開昭62−36747号公報)には、フードの位置決めを行うために、フードと塗装面の距離を位置センサにより検出して距離が一定に維持されるように自動的に位置調整を行うようにした方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭59−154176号公報
【特許文献2】特開昭62−36747号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1及び2に開示される方法では、フードを自動的に位置調整する装置が大掛かりとなり、装置の複雑化及び大型化を招いてしまう。フードが設置される自走式足場は軽量化が求められているため装置の大型化は好ましくない。また、塗装面が屋外にある場合には、風などによりフードが揺れることがあるが、この揺れは瞬間的に起こるものであり、位置センサで位置情報を検出して制御を行うと遅れが生じて精度良く位置調整を行うことは困難であった。
従って本発明は、簡単な装置構成で以ってフードと塗装面の間隔を一定に保つことが可能で、塗装ミストの飛散防止効果を高く維持することができるミスト飛散防止フード装置及び該装置の移動方法を提案する。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明は、塗装面に対向する前面が開放し、該前面が塗装面に対して間隙を存して平行に配置される筐体状のフード本体を備えたミスト飛散防止フード装置において、
前記フード本体にアームを介してスライド機構が取り付けられ、
前記スライド機構は、前記フード本体を前記塗装面に対して平行にスライド移動させるスライドレールと、該スライドレールに複数設けられ、負圧吸引手段で吸引されて塗装面に吸着する吸盤と、を備え、
前記塗装面に前記吸盤を吸着させ前記スライドレールを固定した状態で、前記塗装面との間に一定間隙を存して前記フード本体が前記スライドレール上をスライド移動するようにしたことを特徴とする。
【0007】
本発明は、フード本体に連結される吸盤を塗装面に吸着させて固定することにより、フード本体の揺れを低減でき、フード本体と塗装面の間隔を最小限の距離にすることができる。その結果、フード本体と塗装面の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構を備えることにより、フード本体と塗装面との間の距離を一定に保ったまま該フード本体を塗装面に対して平行移動させ、スライドレールの範囲内において順次塗装することが可能となる。
【0008】
また、塗装面に対向する前面が開放し、該前面が塗装面に対して間隙を存して平行に配置される筐体状のフード本体と、前記フード本体が固定され該フード本体を移動させる自走式足場と、を備えたミスト飛散防止フード装置において、
前記自走式足場にアームを介してスライド機構が取り付けられ、
前記スライド機構は、前記自走式足場を前記塗装面に対して平行にスライド移動させるスライドレールと、該スライドレールに複数設けられ、負圧吸引手段で吸引されて塗装面に吸着する吸盤と、を備え、
前記塗装面に前記吸盤を吸着させ前記スライドレールを固定した状態で前記自走式足場が該スライドレール上をスライド移動するようにし、前記自走式足場に伴われて前記フード本体が前記塗装面との間に一定間隙を存して移動するようにしたことを特徴とする。
【0009】
本発明は、自走式足場に連結される吸盤を塗装面に吸着させて固定することにより、自走式足場の揺れ、延いては自走式足場に固定されたフード本体の揺れを低減でき、フード本体と塗装面の間隔を最小限の距離にすることができる。その結果、フード本体と塗装面の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構を備えることにより、自走式足場に固定されるフード本体と塗装面との間の距離を一定に保ったまま該フード本体を塗装面に対して平行移動させ、スライドレールの範囲内において順次塗装することが可能となる。
また、スライド機構をフード本体に直接連結するのではなく自走式足場に連結することにより、フード本体の強度に幅を持たせることができ、コストを低減することが可能となる。
【0010】
さらに、前記スライド機構が、平行配置された2つのスライド機構からなり、
前記2つのスライド機構の夫々に、前記アームに対して該スライド機構を変位させるアクチュエータと、前記スライドレールに対する前記アームの位置を検出する位置センサとが設けられ、
前記位置センサで検出されるアームの位置情報に基づいて前記アクチュエータと前記負圧吸引手段を制御する制御装置を備え、
前記制御装置は、一方のスライド機構の吸盤を負圧吸引している間に、他方のスライド機構を前記フード本体の進行方向に変位させ、前記位置センサにより前記アームが前記一方のスライドレールの進行方向端部に到達したことが検出された時に、前記他方のスライド機構の吸盤を負圧吸引するとともに前記一方のスライド機構の吸盤の負圧吸引を解除し、前記一方のスライド機構を前記フード本体の進行方向に変位させるように前記アクチュエータを制御することを特徴とする。
【0011】
これは、スライド機構を平行に2つ設置し、一方の吸盤を塗装面に吸着しておき、他方の吸盤の吸着を解除してフリーの状態となった他方のスライド機構をフード本体進行方向に移動させるようにし、これを繰り返し行うことにより連続的にフード本体を移動させることが可能となる。これにより大面積の塗装面に対しても短時間で効率的に塗装を行うことが可能となる。
【0012】
また、塗装面側が開放した筐体状のフード本体を、前記塗装面に対して間隙を存して平行に移動させるミスト飛散防止フード装置の移動方法において、
前記フード本体にアームを介してスライド機構が取り付けられ、該スライド機構に設けられた複数の吸盤を負圧吸引して前記塗装面に吸着させ、
前記塗装面との間に一定間隙を存して、前記フード本体を前記スライド機構が備えるスライドレール上でスライド移動させることを特徴とする。
【0013】
また、塗装面側が開放した筐体状のフード本体が自走式足場の前部に取り付けられ、該自走式足場を駆動することにより前記フード本体が前記塗装面に対して間隙を存して平行に移動するミスト飛散防止フード装置の移動方法において、
前記自走式足場にアームを介してスライド機構が取り付けられ、該スライド機構に設けられた複数の吸盤を負圧吸引して前記塗装面に吸着させ、
前記スライドレールを固定した状態で前記自走式足場を前記スライド機構が備えるスライドレール上でスライド移動させ、前記自走式足場の移動に伴い前記フード本体が前記塗装面との間に一定間隙を存して移動するようにしたことを特徴とする。
【0014】
さらに、前記スライド機構が、平行配置された2つのスライド機構からなり、
一方のスライド機構の吸盤を負圧吸引している間に、他方のスライド機構をアクチュエータにより前記フード本体の進行方向に変位させ、前記一方のスライドレールに対する前記アームの位置を位置センサにより検出し、該アームが前記一方のスライドレールの進行方向端部に到達したことが検出された時に、前記他方のスライド機構の吸盤を負圧吸引するとともに前記一方のスライド機構の吸盤の負圧吸引を解除し、該一方のスライド機構をアクチュエータにより前記フード本体の進行方向に変位させ、前記フード装置を連続的に移動させることを特徴とする。
さらにまた、前記吸盤の負圧吸引を解除する際に、前記負圧吸引手段から前記吸盤に接続された正圧供給手段に切り換えることを特徴とする。
【発明の効果】
【0015】
本発明は、フード本体又は自走式足場に連結される吸盤を塗装面に吸着させて固定することにより、フード本体の揺れを低減でき、フード本体と塗装面の間隔を最小限の距離にすることができる。その結果、フード本体と塗装面の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構を備えることにより、フード本体と塗装面との間の距離を一定に保ったまま該フード本体を塗装面に対して平行移動させ、スライドレールの範囲内において順次塗装することが可能となる。
【0016】
さらに、スライド機構を平行に2つ設置し、一方の吸盤を塗装面に吸着しておき、他方の吸盤の吸着を解除してフリーの状態となった他方のスライド機構をフード本体進行方向に移動させるようにし、これを繰り返し行うことにより連続的にフード本体を移動させることが可能となる。これにより大面積の塗装面に対しても短時間で効率的に塗装を行うことが可能となる。
【図面の簡単な説明】
【0017】
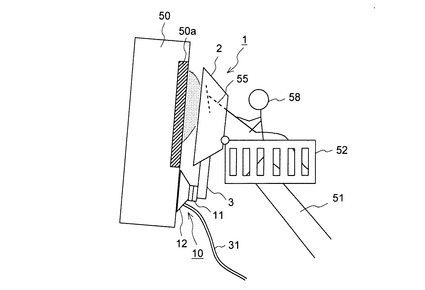
【図1】本発明の実施例1に係るフード装置の側面図である。
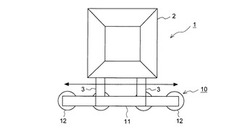
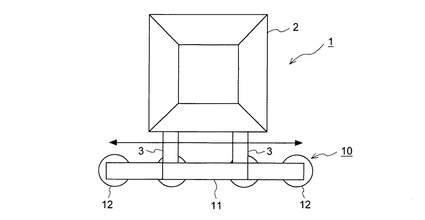
【図2】本発明の実施例1に係るフード装置の正面図である。
【図3】本発明の実施例1を船舶塗装に適用した場合を示す図である。
【図4】本発明の実施例2に係るフード装置の構成を示す正面図である。
【図5】本発明の実施例2に係るフード装置の動作を説明する図である。
【図6】本発明の実施例2に係るフード装置の移動方法を説明するフローチャートである。
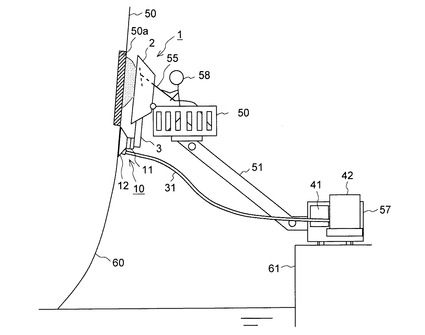
【図7】本発明の実施例3に係るフード装置の側面図である。
【図8】従来のフード装置の構成を示す側面図である。
【発明を実施するための形態】
【0018】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
本実施形態に係る塗装ミストの飛散防止用フード構造は、船舶や建造物等の大型構造物の壁面塗装に際して、塗装面に塗料を噴射することにより発生する塗装ミスト(以下、ミストと称する)が周囲に飛散することを防止するものである。
【実施例1】
【0019】
図1乃至図3を参照して、実施例1に係るフード構造につき説明する。
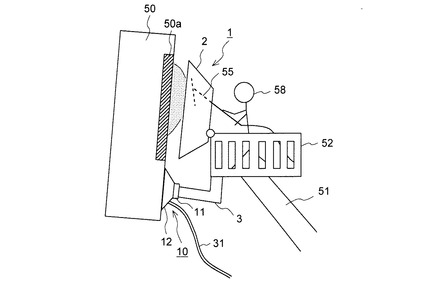
図1及び図2に示すように、フード装置1は筐体状のフード本体2を備える。該フード本体2は自走式足場52に固定されている。該自走式足場52はクレーン51により移動可能となっている。また、前記フード本体2の下部にはアーム3が延設され、該アーム3を介して該フード本体2がスライド機構10に連結されている。該スライド機構10は吸盤12により塗装面50に脱着自在となっている。
前記フード本体2は、塗装時に発生するミストが周囲に飛散することを防止するもので、塗装面50側に位置する前面が開放された筐体状を有する。該フード本体2の形状は特に限定されないが、図1には一例として、広範囲の塗装面に対応でき且つ重量を軽量化するために、前面が拡径したテーパ状筐体形状としている。また、フード本体2の後面には塗料噴射手段挿入穴(不図示)が形成されており、ここからポールガン55等の塗料噴射手段が挿入される。ポールガン55は、自走式足場52に乗った作業員58により操作される。
【0020】
前記スライド機構10は、スライドレール11と、該スライドレール11に所定間隔を隔てて設置される複数の吸盤12と、を備えている。
スライドレール11は吸盤12により塗装面50に吸着固定され、該固定されたスライドレール11上をアーム3に取り付けられたフード本体2がスライド移動するようになっている。一例として、スライドレール11は、アウタレールと、該アウタレールに対してボールベアリングを介してスライド自在に係合されたインナレールと、を備え、アウタレールに吸盤12が取り付けられ、インナレールにアーム3が取り付けられる。
前記吸盤12は、樹脂ゴム等の可撓性材料で形成される。また、該吸盤12は吸着面の裏面にコネクタを有しており、該コネクタに耐圧ホース31が取り付けられる。該ホース31は真空ポンプ42(図3参照)、吐出ポンプ43に接続される。
真空ポンプ42を起動させると、塗装面50と吸盤12の吸着面との間に形成された空間が吸引されて、吸盤12が塗装面50に吸着して固定されるようになっている。
【0021】
複数の吸盤12によりスライドレール11が固定されると、フード本体2はレール軸方向にスライド移動可能となる。これにより、塗装面50とフード本体2との距離を一定に保った状態で該フード本体2を移動させることが可能となる。
図3に、一例として本実施例1に係るフード装置1を、修繕船ドッグでの船舶塗装に用いる場合を示す。岸壁61に停泊している船舶60の外壁(塗装面)50に塗装を行うもので、岸壁61に作業台車57が設置され、該作業台車57によりクレーン51が制御され、自走式足場である作業台52の位置が制御される。吸盤12を吸引するための真空ポンプ42は作業台車57上に載置される。該真空ポンプ42は作業台52に載置してもよいが、重量が大きいため作業台車57上に載置する方が好ましい。
【0022】
上記した構成を備えるフード装置1において、まず、塗装面50の下方に吸盤12を当接してフード装置1の位置決めを行い、位置決めが終了したら真空ポンプ42を起動して吸盤3を吸引し、該吸盤12を塗装面50に吸着させてスライド機構10を固定する。尚、吸盤3は、塗装直後の塗装面を汚すことがないように未塗装面に吸着させることが好ましい。スライド機構10が固定されたら塗装を開始する。塗装は、フード本体2の内部に挿入されたポールガン55を上下又は左右に振りながら塗料を噴射し、フード本体2で囲繞された塗装面領域50aを塗装する。このとき、フード本体2をスライドレール11に沿って移動させながら塗装を行うことにより、フード本体2と塗装面50との距離を一定に保ったままフード本体2を移動させることができる。
【0023】
本実施例1によれば、フード本体2に連結される吸盤12を塗装面50に吸着させて固定することにより、フード本体2の揺れを低減でき、フード本体2と塗装面50の間隔を最小限の距離にすることができる。その結果、フード本体2と塗装面50の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構10を備えることにより、フード本体2と塗装面50との間の距離を一定に保ったまま該フード本体2を塗装面50に対して平行移動させ、スライドレール11の範囲内において順次塗装することが可能となる。
【実施例2】
【0024】
図4乃至図6を参照して、実施例2に係るフード構造につき説明する。尚、本実施例2において、上記した実施例1と同様の構成についてはその詳細な説明を省略する。
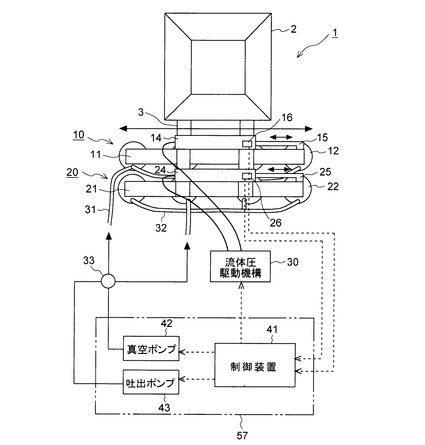
図4において、フード装置1は、筐体状のフード本体2と、該フード本体2から延設されるアーム3と、該アーム3に連結される第1スライド機構10及び第2スライド機構20を備える。
【0025】
第1スライド機構10は、アーム3を介して連結されるフード本体2をスライド移動させる第1スライドレール11と、該スライドレール11に所定間隔を隔てて複数設置された第1吸盤12と、を備える。また、アーム3に固定されて伸縮駆動されるアクチュエータ13を備える。アクチュエータ13は、作動流体が封入されたシリンダ14と、該シリンダ14に摺動可能に嵌装されたロッド15とを備え、シリンダ14にアーム3が固定され、ロッド15の先端にスライドレール11が固定される。そして、アクチュエータ13を伸び側に駆動することにより、レール軸方向にアーム3とスライドレール11が相対移動し、縮み側に駆動することにより逆側にアーム3とスライドレール11が相対移動するようになっている。アクチュエータ13には流体圧駆動機構30から作動流体が送り込まれ、該流体圧駆動機構30に接続された制御装置41によりアクチュエータ13の伸縮駆動が制御されるようになっている。
【0026】
同様に、第2スライド機構20は、第2スライドレール21と複数の第2吸盤22とを備えるとともに、シリンダ24とロッド25からなるアクチュエータ23とを備える。該アクチュエータ23は流体圧駆動機構30に接続され、制御装置41によりアクチュエータ23の伸縮駆動が制御されるようになっている。
尚、前記第1、第2アクチュエータ13、23には、流体圧シリンダや油圧シリンダ等の周知の流体圧駆動装置が用いられる。
【0027】
第1スライドレール11と第2スライドレール21とは所定間隔を隔てて平行に配置される。従って、一方のアクチュエータをフリーの状態にし、他方のアクチュエータを伸縮駆動させることにより、第1スライドレール11と第2スライドレール21は相対的に平行移動する。
第1、第2吸盤12、22に接続されるホース31、32は、他端が真空ポンプ42に接続されている。ホース31、32にはバルブ機構33が設けられている。該バルブ機構33は、二方バルブ、三方バルブ等のバルブを組み合わせたものであり、バルブ機構33を切り替えることにより第1吸盤12と第2吸盤22の負圧吸引、吸引解除を切り替えるようになっている。
好適には、ホース31、32は吐出ポンプ43にも接続され、吸引を解除する時に正圧を送って第1、第2吸盤12、22が塗装面から簡単に離れるようにするとよい。
【0028】
また、第1、第2スライドレール11、21に対するアーム3の位置を検出する位置センサ16、26を備える。これは、アクチュエータ13、23の伸縮量を検出するセンサとしてもよい。該位置センサ16、26には、例えばポテンションメータ等が用いられる。位置センサ16、26で検出された位置情報は制御装置41に送られ、この位置情報をもとに、真空ポンプ42及び吐出ポンプ43の駆動制御、バルブ33の切り替え制御、流体圧駆動機構30の駆動制御が行われる。
制御装置41、真空ポンプ42、吐出ポンプ43は自走式台車52を移動させるための作業台車57に載置されることが好ましい(図3参照)。
【0029】
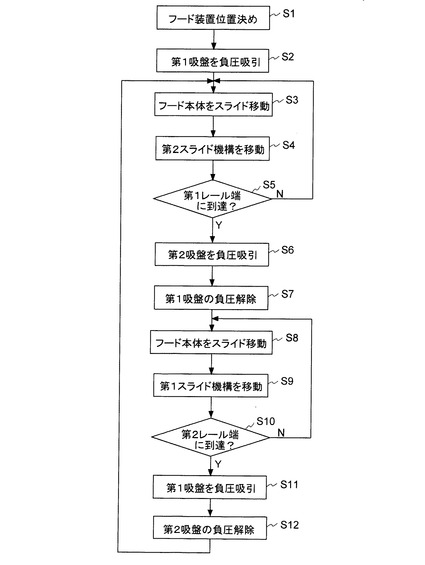
次いで、図6のフローチャートを参照して、フード装置の移動方法を説明する。尚、適宜図5を参照してスライド機構の動作を説明する。
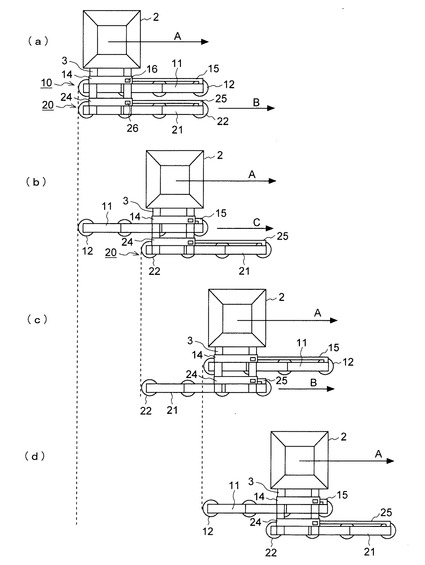
最初に、塗装面に対してフード本体2を位置決めする(S1)。このとき、未塗装面にスライド機構10、20が位置するように配置する。そして、吐出ポンプ43により第1吸盤12を負圧吸引して(S2)塗装面に第1スライド機構10を固定する。図5(a)に示すように、第1スライド機構10を固定した状態で、フード本体2を第1スライドレール11上で矢印A方向に移動させながら塗装を行う。第1アクチュエータ13はフリーの状態としておく。このとき、制御装置41により第2アクチュエータ23を伸び側に駆動しておき、第2スライド機構20をフード本体2とともに図中矢印B方向に移動させる。
【0030】
第1スライド機構10に設けられた位置センサ16により、第1スライドレール11に対するアーム3の位置を検出し、アーム3がスライドレール11の進行方向前端部に到達したか否かを制御装置41により監視しておく(S5)。到達していない場合には、フード本体2を移動しながら塗装する作業を続行する。アーム3が第1スライドレール11の進行方向前端部に到達したことが位置センサ16により検出されたら、第2吸盤22を負圧吸引して(S6)、塗装面に第2スライド機構20を固定する。
尚、第2吸盤22を負圧吸引する前に、第2スライド機構20に設けられた位置センサ26により、第2スライドレール21に対するアーム3の位置を検出し、アーム3が第2スライドレール21上のフード進行方向後端部に位置していない場合、即ち第2アクチュエータ23の伸び量が最大でない場合には、第2アクチュエータ23を最大限まで伸ばしてから第2吸盤22の負圧吸引を行うとよい。
【0031】
第2吸盤22を塗装面に吸着させたら、第1吸盤12に吐出ポンプ43より正圧を送り込んで塗装面への吸着を解除する(S7)。そして、図5(b)に示すように、フード本体2を第2スライドレール21上で矢印A方向に移動させながら塗装を行う(S8)。第2アクチュエータ23はフリーの状態としておく。このとき、制御装置41により第1アクチュエータ13を伸び側に駆動させることにより、第1スライド機構10はフード本体2に対して相対的にフード進行方向である矢印C方向に変位する。第1アクチュエータ13が最大限まで伸びたら、第1スライド機構10はフード本体2とともに移動する(S9)。
【0032】
第2スライド機構20に設けられた位置センサ26により、第2スライドレール21上のアーム3の位置を検出しておき、アーム3がスライドレール21の進行方向前端部に到達したか否かを制御装置41により監視しておく(S10)。到達していない場合には、フード本体2を移動しながら塗装する作業を続行する。アーム3が第2スライドレール21の進行方向前端部に到達したことが位置センサ26により検出されたら、第1吸盤12を負圧吸引して(S11)、塗装面に第1スライド機構10を固定する。
尚、第1吸盤12を負圧吸引する前に、第1スライド機構10に設けられた位置センサ16により、第1スライドレール11に対するアーム3の位置を検出し、アーム3が第1スライドレール11上のフード進行方向後端部に位置していない場合、即ち第1アクチュエータ13の伸び量が最大でない場合には、第1アクチュエータ13を最大限まで伸ばしてから第1吸盤12の負圧吸引を行うとよい。
【0033】
第1吸盤12を塗装面に吸着させたら、第2吸盤22に吐出ポンプ43より正圧を送り込んで塗装面への吸着を解除する(S12)。そして、図5(c)に示すように、フード本体2を第1スライドレール11上で矢印A方向に移動させながら塗装を行う(S3)。このようにして、S3以降のステップを繰り返し行う。図5(d)は2回目繰り返し以降のS8における状態を示す図である。
【0034】
本実施例2によれば、上記した実施例1と同様に、フード本体2の揺れを低減しフード本体2と塗装面の間隔を最小限の距離にできるため、フード本体2と塗装面の間から漏れる塗装ミスト量を低減することが可能となるとともに、スライド機構を平行に2つ設置し、一方の吸盤を塗装面に吸着しておき、他方の吸盤の吸着を解除してフリーの状態となった他方のスライド機構をフード本体進行方向に移動させるようにし、これを繰り返し行うことにより連続的にフード本体2を移動させることが可能となる。これにより大面積の塗装面に対しても短時間で効率的に塗装を行うことが可能となる。
【実施例3】
【0035】
図7を参照して、実施例3に係るフード構造につき説明する。尚、本実施例3において、上記した実施例1又は実施例2と同様の構成についてはその詳細な説明を省略する。
図7に示すように、フード装置1は、筐体状のフード本体2と、該フード本体2が固定される自走式足場52と、該自走式足場52から延設されるアーム3と、該アーム3を介して自走式足場52に連結されるスライド機構10と、を備える。
【0036】
前記自走式足場52は、塗装面50側に、フード本体2が固定されるとともにアーム3が固定されている。フード本体2と自走式足場52の連結部、及びアーム3と自走式足場52の連結部は、その角度を自在に設定可能で、且つ設定した角度が固定できるようになっている。好適には、アーム3と自走式足場52の距離も自在に設定可能で、且つ設定した距離が固定できるようにする。該自走式足場52は塗装面50に対して平行に移動するもので、例えば、作業台車57(図3参照)で制御されるクレーン51に連結され、塗装面50に対して平行に移動するようになっている。
【0037】
前記スライド機構は、スライドレール11と、該スライドレール11に所定間隔を隔てて設置される複数の吸盤12と、を備えている。
複数の吸盤12によりスライドレール11が塗装面50に固定されると、自走式足場52はレール軸方向にスライド移動可能となる。これにより、塗装面50とフード本体2との距離を一定に保った状態で該フード本体2を移動させることが可能となる。
【0038】
上記した構成を備えるフード装置1において、まず、塗装面50の下方に吸盤12を当接して自走式足場52に固定されたフード装置1の位置決めを行い、位置決めが終了したら真空ポンプ42を起動して吸盤3を吸引し、該吸盤12を塗装面50に吸着させてスライド機構10を固定する。スライド機構10が固定されたら塗装を開始する。塗装は、フード本体2の内部に挿入されたポールガン55を上下又は左右に振りながら塗料を噴射し、フード本体2で囲繞された塗装面領域50aを塗装する。このとき、自走式足場52をスライドレール11に沿って移動させながら塗装を行うことにより、フード本体2と塗装面50との距離を一定に保ったままフード本体2を移動させることができる。
【0039】
実施例3によれば、自走式足場52に連結される吸盤12を塗装面50に吸着させて固定することにより、自走式足場52の揺れ、延いては自走式足場52に固定されたフード本体2の揺れを低減でき、フード本体2と塗装面50の間隔を最小限の距離にすることができる。その結果、フード本体2と塗装面50の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構10を備えることにより、フード本体2と塗装面50との間の距離を一定に保った状態で、自走式足場52に固定されたフード本体2を塗装面50に対して平行移動させ、スライドレール11の範囲内において順次塗装することが可能となる。
さらに、スライド機構10をフード本体2に直接連結するのではなく自走式足場52に連結することにより、フード本体2の強度に幅を持たせることができ、コストを低減することが可能となる。
【0040】
また、上記した実施例3の構成を実施例2に適用することも可能である。
即ち、自走式足場52に、アーム3を介して2つのスライド機構を連結し、一方のスライド機構を塗装面に吸着させている間に他方のスライド機構を移動させながら塗装を行った後、他方のスライド機構を塗装面に吸着させて一方のスライド機構を移動させながら塗装を行うようにし、これを交互に行うことにより連続的に塗装を行うことが可能となる。
【産業上の利用可能性】
【0041】
本発明に係るミスト飛散防止フード装置及び該装置の移動方法は、フード本体と塗装面の隙間から塗装ミストが漏れ出て周囲に飛散することを防止可能であり、また大面積の塗装面を塗装可能であるため、船舶や建造物等の大型構造物の塗装に好適に用いられる。
【符号の説明】
【0042】
1 フード装置
2 フード本体
3 アーム
10 第1スライド機構
11 第1スライドレール
12 第1吸盤
13 第1アクチュエータ
20 第2スライド機構
21 第2スライドレール
22 第2吸盤
23 第2アクチュエータ
30 流体圧駆動機構
31、32 ホース
33 バルブ
41 制御装置
42 真空ポンプ
43 吐出ポンプ
50 塗装面
【技術分野】
【0001】
本発明は、大型構造物の塗装時に、噴射した塗料ミストが周囲に飛散することを防止するミスト飛散防止フード装置及び該装置の移動方法に関する。
【背景技術】
【0002】
従来、船舶や建造物等の大型構造物の壁面塗装においては、スプレーガン式塗装方法が多く用いられている。スプレーガン式塗装方法では、塗料を噴射するスプレーガンにより壁面を塗装する方法であるが、特に大型構造物に適用する場合には、図8に示すようにクレーン104により移動可能な作業台103に作業員105が乗り、長尺のポールガン102から塗料を噴射しながらこれを上下あるいは左右に大きく振って大面積の塗装面100を塗装していた。このとき、ポールガン102から塗料を噴射する際に塗装ミストが発生し、この塗装ミストは周囲に飛散して作業員が吸い込んでしまったり、周辺の機器に付着してしまうことがあり、特に屋外で塗装を行う場合には風によって広範囲に拡散してしまう惧れがあった。
そこで、塗装ミストの飛散を防止するために、作業台103の先端にフード101を設置し、塗装面100をフード101で覆って塗装ミストの飛散を軽減するとともに、フード背面にファンを取り付けて、捕集した塗装ミストを吸引するようにしていた。
【0003】
しかし、フードは作業台103のような自走式足場に設置しているため、自走式足場自体の揺れによりフード101と塗装面100との間隔を一定に保つことが難しかった。そこで、従来はフード101と塗装面100の接触を避けるため、フード101と塗装面100との間隔を多く取るようにしていたが、これによりフード101のミスト飛散防止効果が低下してしまうという問題を抱えていた。
また、特許文献1(特開昭59−154176号公報)及び特許文献2(特開昭62−36747号公報)には、フードの位置決めを行うために、フードと塗装面の距離を位置センサにより検出して距離が一定に維持されるように自動的に位置調整を行うようにした方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭59−154176号公報
【特許文献2】特開昭62−36747号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1及び2に開示される方法では、フードを自動的に位置調整する装置が大掛かりとなり、装置の複雑化及び大型化を招いてしまう。フードが設置される自走式足場は軽量化が求められているため装置の大型化は好ましくない。また、塗装面が屋外にある場合には、風などによりフードが揺れることがあるが、この揺れは瞬間的に起こるものであり、位置センサで位置情報を検出して制御を行うと遅れが生じて精度良く位置調整を行うことは困難であった。
従って本発明は、簡単な装置構成で以ってフードと塗装面の間隔を一定に保つことが可能で、塗装ミストの飛散防止効果を高く維持することができるミスト飛散防止フード装置及び該装置の移動方法を提案する。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明は、塗装面に対向する前面が開放し、該前面が塗装面に対して間隙を存して平行に配置される筐体状のフード本体を備えたミスト飛散防止フード装置において、
前記フード本体にアームを介してスライド機構が取り付けられ、
前記スライド機構は、前記フード本体を前記塗装面に対して平行にスライド移動させるスライドレールと、該スライドレールに複数設けられ、負圧吸引手段で吸引されて塗装面に吸着する吸盤と、を備え、
前記塗装面に前記吸盤を吸着させ前記スライドレールを固定した状態で、前記塗装面との間に一定間隙を存して前記フード本体が前記スライドレール上をスライド移動するようにしたことを特徴とする。
【0007】
本発明は、フード本体に連結される吸盤を塗装面に吸着させて固定することにより、フード本体の揺れを低減でき、フード本体と塗装面の間隔を最小限の距離にすることができる。その結果、フード本体と塗装面の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構を備えることにより、フード本体と塗装面との間の距離を一定に保ったまま該フード本体を塗装面に対して平行移動させ、スライドレールの範囲内において順次塗装することが可能となる。
【0008】
また、塗装面に対向する前面が開放し、該前面が塗装面に対して間隙を存して平行に配置される筐体状のフード本体と、前記フード本体が固定され該フード本体を移動させる自走式足場と、を備えたミスト飛散防止フード装置において、
前記自走式足場にアームを介してスライド機構が取り付けられ、
前記スライド機構は、前記自走式足場を前記塗装面に対して平行にスライド移動させるスライドレールと、該スライドレールに複数設けられ、負圧吸引手段で吸引されて塗装面に吸着する吸盤と、を備え、
前記塗装面に前記吸盤を吸着させ前記スライドレールを固定した状態で前記自走式足場が該スライドレール上をスライド移動するようにし、前記自走式足場に伴われて前記フード本体が前記塗装面との間に一定間隙を存して移動するようにしたことを特徴とする。
【0009】
本発明は、自走式足場に連結される吸盤を塗装面に吸着させて固定することにより、自走式足場の揺れ、延いては自走式足場に固定されたフード本体の揺れを低減でき、フード本体と塗装面の間隔を最小限の距離にすることができる。その結果、フード本体と塗装面の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構を備えることにより、自走式足場に固定されるフード本体と塗装面との間の距離を一定に保ったまま該フード本体を塗装面に対して平行移動させ、スライドレールの範囲内において順次塗装することが可能となる。
また、スライド機構をフード本体に直接連結するのではなく自走式足場に連結することにより、フード本体の強度に幅を持たせることができ、コストを低減することが可能となる。
【0010】
さらに、前記スライド機構が、平行配置された2つのスライド機構からなり、
前記2つのスライド機構の夫々に、前記アームに対して該スライド機構を変位させるアクチュエータと、前記スライドレールに対する前記アームの位置を検出する位置センサとが設けられ、
前記位置センサで検出されるアームの位置情報に基づいて前記アクチュエータと前記負圧吸引手段を制御する制御装置を備え、
前記制御装置は、一方のスライド機構の吸盤を負圧吸引している間に、他方のスライド機構を前記フード本体の進行方向に変位させ、前記位置センサにより前記アームが前記一方のスライドレールの進行方向端部に到達したことが検出された時に、前記他方のスライド機構の吸盤を負圧吸引するとともに前記一方のスライド機構の吸盤の負圧吸引を解除し、前記一方のスライド機構を前記フード本体の進行方向に変位させるように前記アクチュエータを制御することを特徴とする。
【0011】
これは、スライド機構を平行に2つ設置し、一方の吸盤を塗装面に吸着しておき、他方の吸盤の吸着を解除してフリーの状態となった他方のスライド機構をフード本体進行方向に移動させるようにし、これを繰り返し行うことにより連続的にフード本体を移動させることが可能となる。これにより大面積の塗装面に対しても短時間で効率的に塗装を行うことが可能となる。
【0012】
また、塗装面側が開放した筐体状のフード本体を、前記塗装面に対して間隙を存して平行に移動させるミスト飛散防止フード装置の移動方法において、
前記フード本体にアームを介してスライド機構が取り付けられ、該スライド機構に設けられた複数の吸盤を負圧吸引して前記塗装面に吸着させ、
前記塗装面との間に一定間隙を存して、前記フード本体を前記スライド機構が備えるスライドレール上でスライド移動させることを特徴とする。
【0013】
また、塗装面側が開放した筐体状のフード本体が自走式足場の前部に取り付けられ、該自走式足場を駆動することにより前記フード本体が前記塗装面に対して間隙を存して平行に移動するミスト飛散防止フード装置の移動方法において、
前記自走式足場にアームを介してスライド機構が取り付けられ、該スライド機構に設けられた複数の吸盤を負圧吸引して前記塗装面に吸着させ、
前記スライドレールを固定した状態で前記自走式足場を前記スライド機構が備えるスライドレール上でスライド移動させ、前記自走式足場の移動に伴い前記フード本体が前記塗装面との間に一定間隙を存して移動するようにしたことを特徴とする。
【0014】
さらに、前記スライド機構が、平行配置された2つのスライド機構からなり、
一方のスライド機構の吸盤を負圧吸引している間に、他方のスライド機構をアクチュエータにより前記フード本体の進行方向に変位させ、前記一方のスライドレールに対する前記アームの位置を位置センサにより検出し、該アームが前記一方のスライドレールの進行方向端部に到達したことが検出された時に、前記他方のスライド機構の吸盤を負圧吸引するとともに前記一方のスライド機構の吸盤の負圧吸引を解除し、該一方のスライド機構をアクチュエータにより前記フード本体の進行方向に変位させ、前記フード装置を連続的に移動させることを特徴とする。
さらにまた、前記吸盤の負圧吸引を解除する際に、前記負圧吸引手段から前記吸盤に接続された正圧供給手段に切り換えることを特徴とする。
【発明の効果】
【0015】
本発明は、フード本体又は自走式足場に連結される吸盤を塗装面に吸着させて固定することにより、フード本体の揺れを低減でき、フード本体と塗装面の間隔を最小限の距離にすることができる。その結果、フード本体と塗装面の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構を備えることにより、フード本体と塗装面との間の距離を一定に保ったまま該フード本体を塗装面に対して平行移動させ、スライドレールの範囲内において順次塗装することが可能となる。
【0016】
さらに、スライド機構を平行に2つ設置し、一方の吸盤を塗装面に吸着しておき、他方の吸盤の吸着を解除してフリーの状態となった他方のスライド機構をフード本体進行方向に移動させるようにし、これを繰り返し行うことにより連続的にフード本体を移動させることが可能となる。これにより大面積の塗装面に対しても短時間で効率的に塗装を行うことが可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施例1に係るフード装置の側面図である。
【図2】本発明の実施例1に係るフード装置の正面図である。
【図3】本発明の実施例1を船舶塗装に適用した場合を示す図である。
【図4】本発明の実施例2に係るフード装置の構成を示す正面図である。
【図5】本発明の実施例2に係るフード装置の動作を説明する図である。
【図6】本発明の実施例2に係るフード装置の移動方法を説明するフローチャートである。
【図7】本発明の実施例3に係るフード装置の側面図である。
【図8】従来のフード装置の構成を示す側面図である。
【発明を実施するための形態】
【0018】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
本実施形態に係る塗装ミストの飛散防止用フード構造は、船舶や建造物等の大型構造物の壁面塗装に際して、塗装面に塗料を噴射することにより発生する塗装ミスト(以下、ミストと称する)が周囲に飛散することを防止するものである。
【実施例1】
【0019】
図1乃至図3を参照して、実施例1に係るフード構造につき説明する。
図1及び図2に示すように、フード装置1は筐体状のフード本体2を備える。該フード本体2は自走式足場52に固定されている。該自走式足場52はクレーン51により移動可能となっている。また、前記フード本体2の下部にはアーム3が延設され、該アーム3を介して該フード本体2がスライド機構10に連結されている。該スライド機構10は吸盤12により塗装面50に脱着自在となっている。
前記フード本体2は、塗装時に発生するミストが周囲に飛散することを防止するもので、塗装面50側に位置する前面が開放された筐体状を有する。該フード本体2の形状は特に限定されないが、図1には一例として、広範囲の塗装面に対応でき且つ重量を軽量化するために、前面が拡径したテーパ状筐体形状としている。また、フード本体2の後面には塗料噴射手段挿入穴(不図示)が形成されており、ここからポールガン55等の塗料噴射手段が挿入される。ポールガン55は、自走式足場52に乗った作業員58により操作される。
【0020】
前記スライド機構10は、スライドレール11と、該スライドレール11に所定間隔を隔てて設置される複数の吸盤12と、を備えている。
スライドレール11は吸盤12により塗装面50に吸着固定され、該固定されたスライドレール11上をアーム3に取り付けられたフード本体2がスライド移動するようになっている。一例として、スライドレール11は、アウタレールと、該アウタレールに対してボールベアリングを介してスライド自在に係合されたインナレールと、を備え、アウタレールに吸盤12が取り付けられ、インナレールにアーム3が取り付けられる。
前記吸盤12は、樹脂ゴム等の可撓性材料で形成される。また、該吸盤12は吸着面の裏面にコネクタを有しており、該コネクタに耐圧ホース31が取り付けられる。該ホース31は真空ポンプ42(図3参照)、吐出ポンプ43に接続される。
真空ポンプ42を起動させると、塗装面50と吸盤12の吸着面との間に形成された空間が吸引されて、吸盤12が塗装面50に吸着して固定されるようになっている。
【0021】
複数の吸盤12によりスライドレール11が固定されると、フード本体2はレール軸方向にスライド移動可能となる。これにより、塗装面50とフード本体2との距離を一定に保った状態で該フード本体2を移動させることが可能となる。
図3に、一例として本実施例1に係るフード装置1を、修繕船ドッグでの船舶塗装に用いる場合を示す。岸壁61に停泊している船舶60の外壁(塗装面)50に塗装を行うもので、岸壁61に作業台車57が設置され、該作業台車57によりクレーン51が制御され、自走式足場である作業台52の位置が制御される。吸盤12を吸引するための真空ポンプ42は作業台車57上に載置される。該真空ポンプ42は作業台52に載置してもよいが、重量が大きいため作業台車57上に載置する方が好ましい。
【0022】
上記した構成を備えるフード装置1において、まず、塗装面50の下方に吸盤12を当接してフード装置1の位置決めを行い、位置決めが終了したら真空ポンプ42を起動して吸盤3を吸引し、該吸盤12を塗装面50に吸着させてスライド機構10を固定する。尚、吸盤3は、塗装直後の塗装面を汚すことがないように未塗装面に吸着させることが好ましい。スライド機構10が固定されたら塗装を開始する。塗装は、フード本体2の内部に挿入されたポールガン55を上下又は左右に振りながら塗料を噴射し、フード本体2で囲繞された塗装面領域50aを塗装する。このとき、フード本体2をスライドレール11に沿って移動させながら塗装を行うことにより、フード本体2と塗装面50との距離を一定に保ったままフード本体2を移動させることができる。
【0023】
本実施例1によれば、フード本体2に連結される吸盤12を塗装面50に吸着させて固定することにより、フード本体2の揺れを低減でき、フード本体2と塗装面50の間隔を最小限の距離にすることができる。その結果、フード本体2と塗装面50の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構10を備えることにより、フード本体2と塗装面50との間の距離を一定に保ったまま該フード本体2を塗装面50に対して平行移動させ、スライドレール11の範囲内において順次塗装することが可能となる。
【実施例2】
【0024】
図4乃至図6を参照して、実施例2に係るフード構造につき説明する。尚、本実施例2において、上記した実施例1と同様の構成についてはその詳細な説明を省略する。
図4において、フード装置1は、筐体状のフード本体2と、該フード本体2から延設されるアーム3と、該アーム3に連結される第1スライド機構10及び第2スライド機構20を備える。
【0025】
第1スライド機構10は、アーム3を介して連結されるフード本体2をスライド移動させる第1スライドレール11と、該スライドレール11に所定間隔を隔てて複数設置された第1吸盤12と、を備える。また、アーム3に固定されて伸縮駆動されるアクチュエータ13を備える。アクチュエータ13は、作動流体が封入されたシリンダ14と、該シリンダ14に摺動可能に嵌装されたロッド15とを備え、シリンダ14にアーム3が固定され、ロッド15の先端にスライドレール11が固定される。そして、アクチュエータ13を伸び側に駆動することにより、レール軸方向にアーム3とスライドレール11が相対移動し、縮み側に駆動することにより逆側にアーム3とスライドレール11が相対移動するようになっている。アクチュエータ13には流体圧駆動機構30から作動流体が送り込まれ、該流体圧駆動機構30に接続された制御装置41によりアクチュエータ13の伸縮駆動が制御されるようになっている。
【0026】
同様に、第2スライド機構20は、第2スライドレール21と複数の第2吸盤22とを備えるとともに、シリンダ24とロッド25からなるアクチュエータ23とを備える。該アクチュエータ23は流体圧駆動機構30に接続され、制御装置41によりアクチュエータ23の伸縮駆動が制御されるようになっている。
尚、前記第1、第2アクチュエータ13、23には、流体圧シリンダや油圧シリンダ等の周知の流体圧駆動装置が用いられる。
【0027】
第1スライドレール11と第2スライドレール21とは所定間隔を隔てて平行に配置される。従って、一方のアクチュエータをフリーの状態にし、他方のアクチュエータを伸縮駆動させることにより、第1スライドレール11と第2スライドレール21は相対的に平行移動する。
第1、第2吸盤12、22に接続されるホース31、32は、他端が真空ポンプ42に接続されている。ホース31、32にはバルブ機構33が設けられている。該バルブ機構33は、二方バルブ、三方バルブ等のバルブを組み合わせたものであり、バルブ機構33を切り替えることにより第1吸盤12と第2吸盤22の負圧吸引、吸引解除を切り替えるようになっている。
好適には、ホース31、32は吐出ポンプ43にも接続され、吸引を解除する時に正圧を送って第1、第2吸盤12、22が塗装面から簡単に離れるようにするとよい。
【0028】
また、第1、第2スライドレール11、21に対するアーム3の位置を検出する位置センサ16、26を備える。これは、アクチュエータ13、23の伸縮量を検出するセンサとしてもよい。該位置センサ16、26には、例えばポテンションメータ等が用いられる。位置センサ16、26で検出された位置情報は制御装置41に送られ、この位置情報をもとに、真空ポンプ42及び吐出ポンプ43の駆動制御、バルブ33の切り替え制御、流体圧駆動機構30の駆動制御が行われる。
制御装置41、真空ポンプ42、吐出ポンプ43は自走式台車52を移動させるための作業台車57に載置されることが好ましい(図3参照)。
【0029】
次いで、図6のフローチャートを参照して、フード装置の移動方法を説明する。尚、適宜図5を参照してスライド機構の動作を説明する。
最初に、塗装面に対してフード本体2を位置決めする(S1)。このとき、未塗装面にスライド機構10、20が位置するように配置する。そして、吐出ポンプ43により第1吸盤12を負圧吸引して(S2)塗装面に第1スライド機構10を固定する。図5(a)に示すように、第1スライド機構10を固定した状態で、フード本体2を第1スライドレール11上で矢印A方向に移動させながら塗装を行う。第1アクチュエータ13はフリーの状態としておく。このとき、制御装置41により第2アクチュエータ23を伸び側に駆動しておき、第2スライド機構20をフード本体2とともに図中矢印B方向に移動させる。
【0030】
第1スライド機構10に設けられた位置センサ16により、第1スライドレール11に対するアーム3の位置を検出し、アーム3がスライドレール11の進行方向前端部に到達したか否かを制御装置41により監視しておく(S5)。到達していない場合には、フード本体2を移動しながら塗装する作業を続行する。アーム3が第1スライドレール11の進行方向前端部に到達したことが位置センサ16により検出されたら、第2吸盤22を負圧吸引して(S6)、塗装面に第2スライド機構20を固定する。
尚、第2吸盤22を負圧吸引する前に、第2スライド機構20に設けられた位置センサ26により、第2スライドレール21に対するアーム3の位置を検出し、アーム3が第2スライドレール21上のフード進行方向後端部に位置していない場合、即ち第2アクチュエータ23の伸び量が最大でない場合には、第2アクチュエータ23を最大限まで伸ばしてから第2吸盤22の負圧吸引を行うとよい。
【0031】
第2吸盤22を塗装面に吸着させたら、第1吸盤12に吐出ポンプ43より正圧を送り込んで塗装面への吸着を解除する(S7)。そして、図5(b)に示すように、フード本体2を第2スライドレール21上で矢印A方向に移動させながら塗装を行う(S8)。第2アクチュエータ23はフリーの状態としておく。このとき、制御装置41により第1アクチュエータ13を伸び側に駆動させることにより、第1スライド機構10はフード本体2に対して相対的にフード進行方向である矢印C方向に変位する。第1アクチュエータ13が最大限まで伸びたら、第1スライド機構10はフード本体2とともに移動する(S9)。
【0032】
第2スライド機構20に設けられた位置センサ26により、第2スライドレール21上のアーム3の位置を検出しておき、アーム3がスライドレール21の進行方向前端部に到達したか否かを制御装置41により監視しておく(S10)。到達していない場合には、フード本体2を移動しながら塗装する作業を続行する。アーム3が第2スライドレール21の進行方向前端部に到達したことが位置センサ26により検出されたら、第1吸盤12を負圧吸引して(S11)、塗装面に第1スライド機構10を固定する。
尚、第1吸盤12を負圧吸引する前に、第1スライド機構10に設けられた位置センサ16により、第1スライドレール11に対するアーム3の位置を検出し、アーム3が第1スライドレール11上のフード進行方向後端部に位置していない場合、即ち第1アクチュエータ13の伸び量が最大でない場合には、第1アクチュエータ13を最大限まで伸ばしてから第1吸盤12の負圧吸引を行うとよい。
【0033】
第1吸盤12を塗装面に吸着させたら、第2吸盤22に吐出ポンプ43より正圧を送り込んで塗装面への吸着を解除する(S12)。そして、図5(c)に示すように、フード本体2を第1スライドレール11上で矢印A方向に移動させながら塗装を行う(S3)。このようにして、S3以降のステップを繰り返し行う。図5(d)は2回目繰り返し以降のS8における状態を示す図である。
【0034】
本実施例2によれば、上記した実施例1と同様に、フード本体2の揺れを低減しフード本体2と塗装面の間隔を最小限の距離にできるため、フード本体2と塗装面の間から漏れる塗装ミスト量を低減することが可能となるとともに、スライド機構を平行に2つ設置し、一方の吸盤を塗装面に吸着しておき、他方の吸盤の吸着を解除してフリーの状態となった他方のスライド機構をフード本体進行方向に移動させるようにし、これを繰り返し行うことにより連続的にフード本体2を移動させることが可能となる。これにより大面積の塗装面に対しても短時間で効率的に塗装を行うことが可能となる。
【実施例3】
【0035】
図7を参照して、実施例3に係るフード構造につき説明する。尚、本実施例3において、上記した実施例1又は実施例2と同様の構成についてはその詳細な説明を省略する。
図7に示すように、フード装置1は、筐体状のフード本体2と、該フード本体2が固定される自走式足場52と、該自走式足場52から延設されるアーム3と、該アーム3を介して自走式足場52に連結されるスライド機構10と、を備える。
【0036】
前記自走式足場52は、塗装面50側に、フード本体2が固定されるとともにアーム3が固定されている。フード本体2と自走式足場52の連結部、及びアーム3と自走式足場52の連結部は、その角度を自在に設定可能で、且つ設定した角度が固定できるようになっている。好適には、アーム3と自走式足場52の距離も自在に設定可能で、且つ設定した距離が固定できるようにする。該自走式足場52は塗装面50に対して平行に移動するもので、例えば、作業台車57(図3参照)で制御されるクレーン51に連結され、塗装面50に対して平行に移動するようになっている。
【0037】
前記スライド機構は、スライドレール11と、該スライドレール11に所定間隔を隔てて設置される複数の吸盤12と、を備えている。
複数の吸盤12によりスライドレール11が塗装面50に固定されると、自走式足場52はレール軸方向にスライド移動可能となる。これにより、塗装面50とフード本体2との距離を一定に保った状態で該フード本体2を移動させることが可能となる。
【0038】
上記した構成を備えるフード装置1において、まず、塗装面50の下方に吸盤12を当接して自走式足場52に固定されたフード装置1の位置決めを行い、位置決めが終了したら真空ポンプ42を起動して吸盤3を吸引し、該吸盤12を塗装面50に吸着させてスライド機構10を固定する。スライド機構10が固定されたら塗装を開始する。塗装は、フード本体2の内部に挿入されたポールガン55を上下又は左右に振りながら塗料を噴射し、フード本体2で囲繞された塗装面領域50aを塗装する。このとき、自走式足場52をスライドレール11に沿って移動させながら塗装を行うことにより、フード本体2と塗装面50との距離を一定に保ったままフード本体2を移動させることができる。
【0039】
実施例3によれば、自走式足場52に連結される吸盤12を塗装面50に吸着させて固定することにより、自走式足場52の揺れ、延いては自走式足場52に固定されたフード本体2の揺れを低減でき、フード本体2と塗装面50の間隔を最小限の距離にすることができる。その結果、フード本体2と塗装面50の間から漏れる塗装ミスト量を低減することが可能となる。
また、スライド機構10を備えることにより、フード本体2と塗装面50との間の距離を一定に保った状態で、自走式足場52に固定されたフード本体2を塗装面50に対して平行移動させ、スライドレール11の範囲内において順次塗装することが可能となる。
さらに、スライド機構10をフード本体2に直接連結するのではなく自走式足場52に連結することにより、フード本体2の強度に幅を持たせることができ、コストを低減することが可能となる。
【0040】
また、上記した実施例3の構成を実施例2に適用することも可能である。
即ち、自走式足場52に、アーム3を介して2つのスライド機構を連結し、一方のスライド機構を塗装面に吸着させている間に他方のスライド機構を移動させながら塗装を行った後、他方のスライド機構を塗装面に吸着させて一方のスライド機構を移動させながら塗装を行うようにし、これを交互に行うことにより連続的に塗装を行うことが可能となる。
【産業上の利用可能性】
【0041】
本発明に係るミスト飛散防止フード装置及び該装置の移動方法は、フード本体と塗装面の隙間から塗装ミストが漏れ出て周囲に飛散することを防止可能であり、また大面積の塗装面を塗装可能であるため、船舶や建造物等の大型構造物の塗装に好適に用いられる。
【符号の説明】
【0042】
1 フード装置
2 フード本体
3 アーム
10 第1スライド機構
11 第1スライドレール
12 第1吸盤
13 第1アクチュエータ
20 第2スライド機構
21 第2スライドレール
22 第2吸盤
23 第2アクチュエータ
30 流体圧駆動機構
31、32 ホース
33 バルブ
41 制御装置
42 真空ポンプ
43 吐出ポンプ
50 塗装面
【特許請求の範囲】
【請求項1】
塗装面に対向する前面が開放し、該前面が塗装面に対して間隙を存して平行に配置される筐体状のフード本体を備えたミスト飛散防止フード装置において、
前記フード本体にアームを介してスライド機構が取り付けられ、
前記スライド機構は、前記フード本体を前記塗装面に対して平行にスライド移動させるスライドレールと、該スライドレールに複数設けられ、負圧吸引手段で吸引されて塗装面に吸着する吸盤と、を備え、
前記塗装面に前記吸盤を吸着させ前記スライドレールを固定した状態で、前記塗装面との間に一定間隙を存して前記フード本体が前記スライドレール上をスライド移動するようにしたことを特徴とするミスト飛散防止フード装置。
【請求項2】
塗装面に対向する前面が開放し、該前面が塗装面に対して間隙を存して平行に配置される筐体状のフード本体と、前記フード本体が固定され該フード本体を移動させる自走式足場と、を備えたミスト飛散防止フード装置において、
前記自走式足場にアームを介してスライド機構が取り付けられ、
前記スライド機構は、前記自走式足場を前記塗装面に対して平行にスライド移動させるスライドレールと、該スライドレールに複数設けられ、負圧吸引手段で吸引されて塗装面に吸着する吸盤と、を備え、
前記塗装面に前記吸盤を吸着させ前記スライドレールを固定した状態で前記自走式足場が該スライドレール上をスライド移動するようにし、前記自走式足場に伴われて前記フード本体が前記塗装面との間に一定間隙を存して移動するようにしたことを特徴とするミスト飛散防止フード装置。
【請求項3】
前記スライド機構が、平行配置された2つのスライド機構からなり、
前記2つのスライド機構の夫々に、前記アームに対して該スライド機構を変位させるアクチュエータと、前記スライドレールに対する前記アームの位置を検出する位置センサとが設けられ、
前記位置センサで検出されるアームの位置情報に基づいて前記アクチュエータと前記負圧吸引手段を制御する制御装置を備え、
前記制御装置は、一方のスライド機構の吸盤を負圧吸引している間に、他方のスライド機構を前記フード本体の進行方向に変位させ、前記位置センサにより前記アームが前記一方のスライドレールの進行方向端部に到達したことが検出された時に、前記他方のスライド機構の吸盤を負圧吸引するとともに前記一方のスライド機構の吸盤の負圧吸引を解除し、前記一方のスライド機構を前記フード本体の進行方向に変位させるように前記アクチュエータを制御することを特徴とする請求項1若しくは2記載のミスト飛散防止フード装置。
【請求項4】
塗装面側が開放した筐体状のフード本体を、前記塗装面に対して間隙を存して平行に移動させるミスト飛散防止フード装置の移動方法において、
前記フード本体にアームを介してスライド機構が取り付けられ、該スライド機構に設けられた複数の吸盤を負圧吸引して前記塗装面に吸着させ、
前記塗装面との間に一定間隙を存して、前記フード本体を前記スライド機構が備えるスライドレール上でスライド移動させることを特徴とするミスト飛散防止フード装置の移動方法。
【請求項5】
塗装面側が開放した筐体状のフード本体が自走式足場の前部に取り付けられ、該自走式足場を駆動することにより前記フード本体が前記塗装面に対して間隙を存して平行に移動するミスト飛散防止フード装置の移動方法において、
前記自走式足場にアームを介してスライド機構が取り付けられ、該スライド機構に設けられた複数の吸盤を負圧吸引して前記塗装面に吸着させ、
前記スライドレールを固定した状態で前記自走式足場を前記スライド機構が備えるスライドレール上でスライド移動させ、前記自走式足場の移動に伴い前記フード本体が前記塗装面との間に一定間隙を存して移動するようにしたことを特徴とするミスト飛散防止フード装置の移動方法。
【請求項6】
前記スライド機構が、平行配置された2つのスライド機構からなり、
一方のスライド機構の吸盤を負圧吸引している間に、他方のスライド機構をアクチュエータにより前記フード本体の進行方向に変位させ、前記一方のスライドレールに対する前記アームの位置を位置センサにより検出し、該アームが前記一方のスライドレールの進行方向端部に到達したことが検出された時に、前記他方のスライド機構の吸盤を負圧吸引するとともに前記一方のスライド機構の吸盤の負圧吸引を解除し、該一方のスライド機構をアクチュエータにより前記フード本体の進行方向に変位させ、前記フード装置を連続的に移動させることを特徴とする請求項4若しくは5記載のミスト飛散防止フード装置の移動方法。
【請求項7】
前記吸盤の負圧吸引を解除する際に、前記負圧吸引手段から前記吸盤に接続された正圧供給手段に切り換えることを特徴とする請求項4若しくは5記載のミスト飛散防止フード装置の移動方法。
【請求項1】
塗装面に対向する前面が開放し、該前面が塗装面に対して間隙を存して平行に配置される筐体状のフード本体を備えたミスト飛散防止フード装置において、
前記フード本体にアームを介してスライド機構が取り付けられ、
前記スライド機構は、前記フード本体を前記塗装面に対して平行にスライド移動させるスライドレールと、該スライドレールに複数設けられ、負圧吸引手段で吸引されて塗装面に吸着する吸盤と、を備え、
前記塗装面に前記吸盤を吸着させ前記スライドレールを固定した状態で、前記塗装面との間に一定間隙を存して前記フード本体が前記スライドレール上をスライド移動するようにしたことを特徴とするミスト飛散防止フード装置。
【請求項2】
塗装面に対向する前面が開放し、該前面が塗装面に対して間隙を存して平行に配置される筐体状のフード本体と、前記フード本体が固定され該フード本体を移動させる自走式足場と、を備えたミスト飛散防止フード装置において、
前記自走式足場にアームを介してスライド機構が取り付けられ、
前記スライド機構は、前記自走式足場を前記塗装面に対して平行にスライド移動させるスライドレールと、該スライドレールに複数設けられ、負圧吸引手段で吸引されて塗装面に吸着する吸盤と、を備え、
前記塗装面に前記吸盤を吸着させ前記スライドレールを固定した状態で前記自走式足場が該スライドレール上をスライド移動するようにし、前記自走式足場に伴われて前記フード本体が前記塗装面との間に一定間隙を存して移動するようにしたことを特徴とするミスト飛散防止フード装置。
【請求項3】
前記スライド機構が、平行配置された2つのスライド機構からなり、
前記2つのスライド機構の夫々に、前記アームに対して該スライド機構を変位させるアクチュエータと、前記スライドレールに対する前記アームの位置を検出する位置センサとが設けられ、
前記位置センサで検出されるアームの位置情報に基づいて前記アクチュエータと前記負圧吸引手段を制御する制御装置を備え、
前記制御装置は、一方のスライド機構の吸盤を負圧吸引している間に、他方のスライド機構を前記フード本体の進行方向に変位させ、前記位置センサにより前記アームが前記一方のスライドレールの進行方向端部に到達したことが検出された時に、前記他方のスライド機構の吸盤を負圧吸引するとともに前記一方のスライド機構の吸盤の負圧吸引を解除し、前記一方のスライド機構を前記フード本体の進行方向に変位させるように前記アクチュエータを制御することを特徴とする請求項1若しくは2記載のミスト飛散防止フード装置。
【請求項4】
塗装面側が開放した筐体状のフード本体を、前記塗装面に対して間隙を存して平行に移動させるミスト飛散防止フード装置の移動方法において、
前記フード本体にアームを介してスライド機構が取り付けられ、該スライド機構に設けられた複数の吸盤を負圧吸引して前記塗装面に吸着させ、
前記塗装面との間に一定間隙を存して、前記フード本体を前記スライド機構が備えるスライドレール上でスライド移動させることを特徴とするミスト飛散防止フード装置の移動方法。
【請求項5】
塗装面側が開放した筐体状のフード本体が自走式足場の前部に取り付けられ、該自走式足場を駆動することにより前記フード本体が前記塗装面に対して間隙を存して平行に移動するミスト飛散防止フード装置の移動方法において、
前記自走式足場にアームを介してスライド機構が取り付けられ、該スライド機構に設けられた複数の吸盤を負圧吸引して前記塗装面に吸着させ、
前記スライドレールを固定した状態で前記自走式足場を前記スライド機構が備えるスライドレール上でスライド移動させ、前記自走式足場の移動に伴い前記フード本体が前記塗装面との間に一定間隙を存して移動するようにしたことを特徴とするミスト飛散防止フード装置の移動方法。
【請求項6】
前記スライド機構が、平行配置された2つのスライド機構からなり、
一方のスライド機構の吸盤を負圧吸引している間に、他方のスライド機構をアクチュエータにより前記フード本体の進行方向に変位させ、前記一方のスライドレールに対する前記アームの位置を位置センサにより検出し、該アームが前記一方のスライドレールの進行方向端部に到達したことが検出された時に、前記他方のスライド機構の吸盤を負圧吸引するとともに前記一方のスライド機構の吸盤の負圧吸引を解除し、該一方のスライド機構をアクチュエータにより前記フード本体の進行方向に変位させ、前記フード装置を連続的に移動させることを特徴とする請求項4若しくは5記載のミスト飛散防止フード装置の移動方法。
【請求項7】
前記吸盤の負圧吸引を解除する際に、前記負圧吸引手段から前記吸盤に接続された正圧供給手段に切り換えることを特徴とする請求項4若しくは5記載のミスト飛散防止フード装置の移動方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−179245(P2010−179245A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−25297(P2009−25297)
【出願日】平成21年2月5日(2009.2.5)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月5日(2009.2.5)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]