
ミラー駆動装置及びその駆動方法並びに製造方法
【課題】圧電アクチュエータの力を効率よく利用してミラーの回転方向に大きな変位を得るとともに、垂直方向の並進運動を大幅に抑制する。
【解決手段】ミラー部(12)を挟んで両側に一対の圧電アクチュエータ部(14)が配置される。圧電アクチュエータ部(14)の一端(14A)は連結部(16)を介してミラー部(12)の端部(12A)に接続され、圧電アクチュエータ部(14)の他端(14B)は固定部(30)に固定支持される。また、ミラー部(12)は、垂直方向への並進運動する抑制する垂直移動抑制構造(32)を介して固定部(30)に接続されている。回転軸(18)付近に接続されるトーションバー(20)とトーションバー(20)の基端部を支持するトーションバー支持部(22)とにより垂直移動抑制構造(32)を構成できる。
【解決手段】ミラー部(12)を挟んで両側に一対の圧電アクチュエータ部(14)が配置される。圧電アクチュエータ部(14)の一端(14A)は連結部(16)を介してミラー部(12)の端部(12A)に接続され、圧電アクチュエータ部(14)の他端(14B)は固定部(30)に固定支持される。また、ミラー部(12)は、垂直方向への並進運動する抑制する垂直移動抑制構造(32)を介して固定部(30)に接続されている。回転軸(18)付近に接続されるトーションバー(20)とトーションバー(20)の基端部を支持するトーションバー支持部(22)とにより垂直移動抑制構造(32)を構成できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はミラー駆動装置に係り、特に、光走査に用いる光偏向器に好適なマイクロミラーデバイスの構造及びその駆動方法、並びに製造技術に関する。
【背景技術】
【0002】
シリコン(Si)の微細加工技術を用いて作製されたマイクロスキャナ(以下、「MEMS(Micro Electro Mechanical System)スキャナ」という。)は、従来の光走査モジュールであるポリゴンミラーなどと比べて小型かつ低消費電力であることが特徴である。このためMEMSスキャナは、レーザープロジェクタから光干渉断層計(OCT;Optical Coherence Tomography)のような光診断用スキャナなど、幅広い応用が期待されている。
【0003】
MEMSスキャナの駆動方式は様々であるが、その中でも圧電体の変形を利用した圧電駆動方式は、トルクが大きい一方でデバイス構造、駆動回路が単純であるため、小型で大きなスキャン角度が得られる方式として有望視されている。以下に一般的な圧電マイクロミラー(圧電MEMSスキャナ)の構造について説明する。
【0004】
<トーションバー構造>
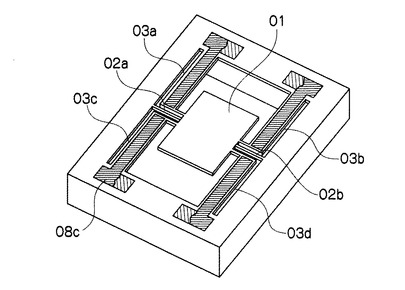
一般的な圧電MEMSスキャナでは、回転軸に沿ったトーションバー(ねじり棒)をミラーに接続し、トーションバーを複数本の圧電カンチレバーによってねじる構造が採用されているものが多い(特許文献1〜3参照)。図14は特許文献1の「図7」に記載されている構造である。同図における符号01がミラー部、02aと02bがトーションバー、03a〜03dが圧電カンチレバーである。
【0005】
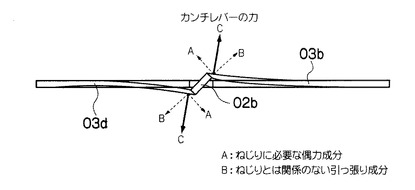
図14のトーションバーを軸方向から見た模式断面図を図15に示す。ここでは、符号02bのトーションバーを示すが、他方のトーションバー02aについても同様である。図15に示すとおり、この構造ではトーションバー02bを挟んだ2本の圧電カンチレバー03b、03dがそれぞれ上下逆方向に変位してトーションバー02bをねじるように駆動される。
【0006】
トーションバー駆動方式は、圧電カンチレバーによるすべての力がミラーの回転には使われず、力の利用効率が悪いという問題がある。すなわち、ある回転軸でねじれるトーションバーを捻る純粋なトルクは、ねじり軸周りの偶力(A方向のベクトル成分)によってもたらされる。しかし、図15のような圧電カンチレバー03b、03dによるねじりの動きは、カンチレバーの変位量が増大するに伴って、力の作用方向がねじり軸周りの偶力から外れていく。
【0007】
トーションバー02bをねじるために必要な偶力成分は図15中のAで示したベクトル方向である。このA方向の偶力成分は、カンチレバーの力(図中Cで示したベクトル)のA方向成分として得られる。カンチレバーの力(C方向ベクトル)は、レバー先端部が曲がる方向、つまり、先端部の面に垂直な方向であるため、カンチレバーの変位が大きくなるほど、トーションバーのねじりに寄与する偶力成分(A方向成分)は小さくなり、ねじりに関係しない余計な力の成分(図中Bで示す引っ張り方向の成分)が大きくなる。このため、圧電カンチレバーとして大きな曲げ変位が得られても、その変位がトーションバーのねじり量、すなわちミラー部の傾き量に効率良く反映できないという欠点がある。
【0008】
上述のように、トーションバー構造は、圧電カンチレバーでトーションバーをねじると、回転軸と垂直方向に引っ張る力(B方向のベクトル成分)が発生し、これが力学的なエネルギーロスとなって回転角の低下を招く。このエネルギーロスは回転角が高くなるほど大きくなるため、トーションバーを用いた構造で大きな回転角度を得るのは非常に難しかった。
【0009】
<曲げヒンジ構造>
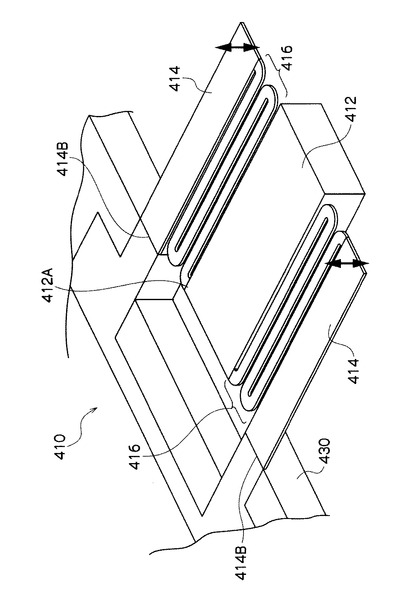
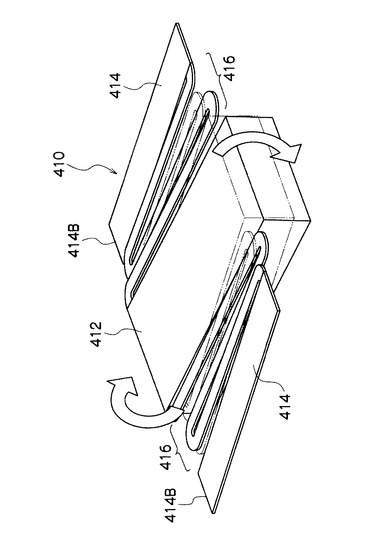
上記トーションバー構造の課題を解決するものとして、図16に示すような構造のMEMSスキャナデバイス410が考えられる。これは、方形のミラー部412の端部412Aに薄板の連結部416を介して圧電カンチレバー414を接続した構造である。圧電カンチレバー414の基端414B部分は固定支持部材としての固定部430に固定されている。圧電カンチレバー414の上下駆動によりミラー部412の端部412Aを上下に振動させることで、慣性力によりミラー部412に傾き運動が誘起される。このような構造を「曲げヒンジ構造」と呼ぶこととする。
【0010】
曲げヒンジ構造は、ミラー部412の端部412Aの振動により、傾き(回転)方向の共振を誘起し、その共振振動でミラーを傾けるものであり、ミラー部412と圧電カンチレバー414の間に蛇行した形状の連結部(ミアンダ状に折りたたんだヒンジ)416を設けることにより、ミラー部412の傾き角の変位がさらに拡大する。ただし、蛇行した(ミアンダ状の)連結部416は不可欠な要素というわけではなく、ミラー部412の端部に直接圧電カンチレバーを接続する構成も可能である。
【0011】
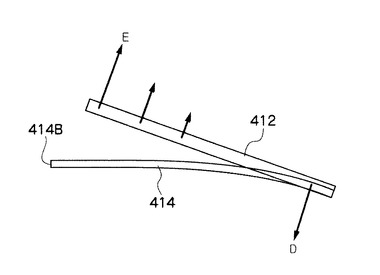
図17に曲げヒンジ構造による動作の模式図を示した。同図では説明を簡単にするために、ミラー部412の端部に圧電カンチレバー414を直接接続した構成を示した。図17において、圧電カンチレバー414の加速度方向(力がかかる方向)は矢印Dで示す下向き、ミラー部412にかかる慣性力が働く方向は、その反対方向(矢印E方向)である。つまり、この慣性力は純粋にミラー部412を傾ける方向と一致しており、余計な力の成分が発生しない。したがって、圧電カンチレバー414で発生する力がミラー部412を傾ける力として効率良く利用される。
【0012】
この曲げヒンジ構造においては、ミラー回転運動の共振周波数で圧電カンチレバー414を駆動すると、図18に示すように、カンチレバーの変位に伴ってヒンジ(連結部416)が曲がり、ミラー部412に慣性トルクが発生してミラー部412の回転運動共振を誘発する。
【0013】
図17で説明したとおり、圧電カンチレバー414の変位方向が常にミラー部412の回転方向にほぼ一致し、すべての力がミラーの回転に用いられる。そのため、トーションバー構造よりも力の使用効率がはるかに良く、回転角が大きくなってもエネルギーロスが少ないため大変位が得られる。また、ミラー部412と圧電カンチレバー414との接続部に図16のようなミアンダ状の連結部416を採用した場合、ミアンダ状の複数の曲げヒンジが少しずつ曲がって変位を蓄積していくため、個々のヒンジにかかる応力が少なく、回転角が高くなっても破壊されにくいという利点がある。
【0014】
<ミアンダ状圧電カンチレバー構造>
非特許文献1で提案されている構造は、上述した曲げヒンジ構造に近い構造ではあるが、共振駆動を用いないタイプであり、カンチレバー自体を複数折り畳んだミアンダ状とし、ミラーを両側から挟みこむ構造である。この方式では、圧電カンチレバーを折り畳み、交互に逆方向の曲げを誘起するように駆動することによって変位を拡大させ、共振を用いなくてもミラーを大きく傾けることができる。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開2008−257226号公報
【特許文献2】特開2009−169089号公報
【特許文献3】特開2005−177876号公報
【非特許文献】
【0016】
【非特許文献1】M. Tani, M. Akamatsu, Y. Yasuda, H. Toshiyoshi., ‘A two-axis piezoelectric tilting micro mirror witha newly developed PZT-meandering actuator’ in 'MicroElectro Mechanical Systems, 2007. MEMS. IEEE 20thInternational Conference (2007) pp. 699 -702.)
【発明の概要】
【発明が解決しようとする課題】
【0017】
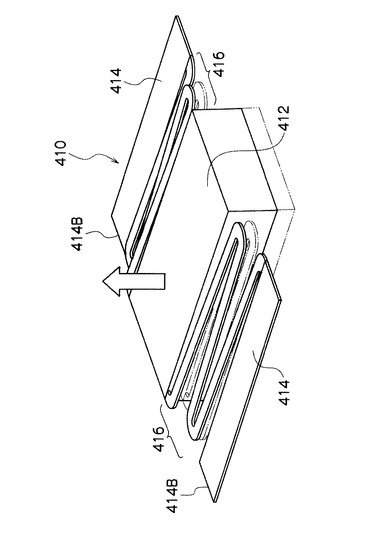
上述のように、曲げヒンジ構造やミアンダ状圧電カンチレバー構造は、トーションバー構造に比べて力を効率的に伝え、大きな変位が得られるという利点がある。しかし、これらの構造では、図19に示すような、ミラー反射面に垂直な方向の並進運動が起こりやすいという欠点がある。具体的には以下の2点にまとめられる。
【0018】
(1)構造上、ミラー面に対しての垂直方向並進運動のバネ定数が小さく、共振周波数が低いため、環境振動によって並進運動共振が容易に励起されてしまう。
【0019】
(2)構造上、ミラーの回転運動と並進運動の共振周波数が非常に近くなるため、回転運動を共振駆動する場合、その駆動の振動で並進運動方向にも共振してしまう。
【0020】
これらの問題は、回転角を大きくしようとして曲げヒンジを柔らかくしたり、圧電カンチレバーの折り畳み数を増やすほど顕著になる。駆動中にミラーが垂直方向に並進運動すると、スキャン中の光路長変動、焦点ズレ、スポットの位置ズレ等を引き起こすため、実際の使用では致命的な問題となる。
【0021】
また、曲げヒンジ構造やミアンダ状圧電カンチレバー構造は、トーションバーのようなミラーの回転軸を保つ構造が存在しないため、回転中心がミラーの中心部と一致しないという問題もある。
【0022】
本発明はこのような事情に鑑みてなされたもので、圧電アクチュエータの力を効率よく利用してミラーの回転方向に大きな変位を得ることができるとともに、ミラーの垂直方向並進運動を大幅に抑制することができるミラー駆動装置及びその駆動方法並びに製造方法を提供することを目的とする。
【課題を解決するための手段】
【0023】
前記目的を達成するために本発明に係るミラー駆動装置は、光を反射する反射面を有するミラー部と、前記ミラー部を挟んで両側に配置される一対の圧電アクチュエータ部と、前記ミラー部の回転軸から前記反射面に沿って前記回転軸に垂直な方向に離れた前記ミラー部の端部に前記圧電アクチュエータ部の一端を接続させる連結部と、前記圧電アクチュエータ部の他端を支持する固定部と、前記固定部に一端が接続され、他端が前記ミラー部に接続されており、前記ミラー部の回転軸が前記反射面の垂直方向に並進運動することを抑制する垂直移動抑制構造と、を備える。
【0024】
この発明によれば、圧電アクチュエータ部の一端は連結部を介してミラー部の端部に接続され、他端は固定部に固定支持される。圧電アクチュエータ部を駆動すると連結部を介してミラー部の端部が振られ、ミラー部に回転トルクが与えられる。これにより、ミラー部は回転軸の周りに回転運動し、反射面が傾く。
【0025】
圧電アクチュエータ部の屈曲変位による力の方向は、ミラー部を回転させる方向と概ね一致するため、圧電アクチュエータ部が発生する力を効率よく回転運動に利用することができ、大きな回転角(ミラーの傾き角)を得ることができる。また、ミラー部は垂直移動抑制構造を介して固定部に接続されているため、ミラー部の垂直方向への並進運動が抑制される。
【0026】
他の発明態様については、明細書及び図面の記載により明らかにする。
【発明の効果】
【0027】
本発明によれば、圧電アクチュエータ部の力を効率よく利用し、大きな回転角でミラー部を回転運動させることができるとともに、ミラー部の垂直方向の並進運動を大幅に抑制することができる。
【図面の簡単な説明】
【0028】
【図1】第1実施形態に係るMEMSスキャナデバイスの斜視図
【図2】図1のMEMSスキャナデバイスをミラー部の反射面側から見た平面図
【図3】圧電アクチュエータ部(カンチレバー部)の断面図
【図4】共振駆動時における回転モードの動作を説明するための斜視図
【図5】並進モードの動作を説明するための斜視図
【図6】第2実施形態に係るMEMSスキャナデバイスにおける回転モードの動作を説明するための要部斜視図
【図7】第2実施形態に係るMEMSスキャナデバイスにおける並進モードの動作を説明するための要部斜視図
【図8】比較例1に係るMEMSスキャナデバイスの要部構成を示す斜視図
【図9】比較例1の構成における回転モードの動作の説明図
【図10】比較例1の構成における並進モードの動作の説明図
【図11】実施例1,2と比較例1,2の測定結果をまとめた図表
【図12】第3実施形態に係るMEMSスキャナデバイスの構成を示す平面図
【図13】第4実施形態に係るMEMSスキャナデバイスの構成を示す平面図
【図14】従来のトーションバー構造を示す斜視図
【図15】従来のトーションバー構造の動作を示す模式断面図
【図16】比較例2に係る従来の曲げヒンジ構造を示す斜視図
【図17】曲げヒンジ構造による動作を説明するための模式図
【図18】比較例2の構成における回転モードの動作の説明図
【図19】比較例2の構成における並進モードの動作の説明図
【発明を実施するための形態】
【0029】
以下、添付図面に従って本発明の好ましい実施形態について詳説する。
【0030】
〔第1実施形態〕
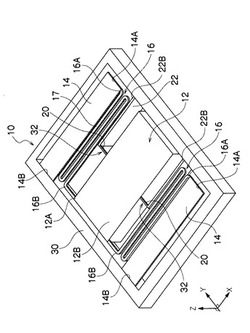
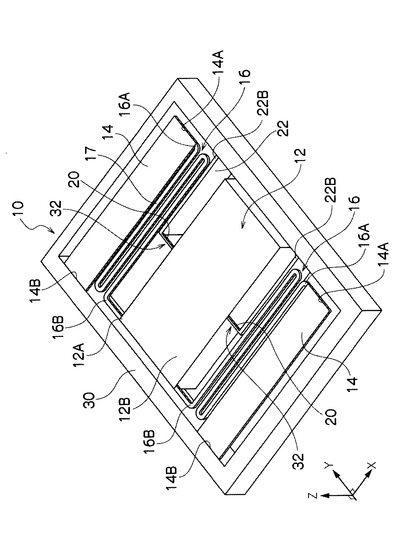
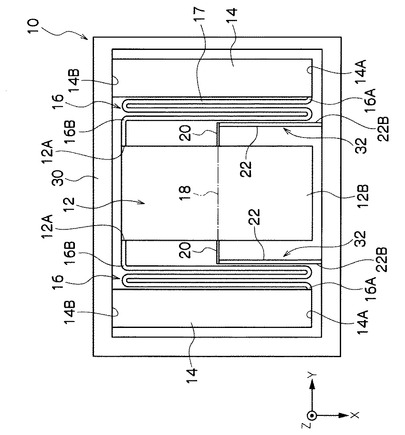
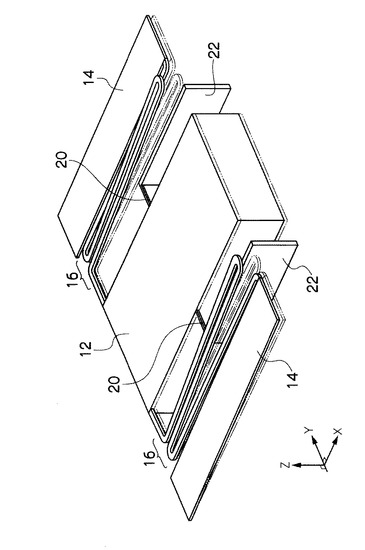
図1は第1実施形態に係るMEMSスキャナデバイスの斜視図であり、図2はミラー部の反射面側から見た平面図(上面図)である。これらの図面に示したように、本例のMEMSスキャナデバイス10は、ミラー部12と、該ミラー部12を挟んで両側に配置される一対の圧電アクチュエータ部14と、ミラー部12の端部12Aに圧電アクチュエータ部14の一端(14A)を接続させる連結部16と、ミラー部12の回転軸18と略一致する位置でミラー部12に接続されたトーションバー20と、このトーションバー20の一端を支持するトーションバー支持部22と、圧電アクチュエータ部14の基端14B及びトーションバー支持部22の基端22Bを固定支持する固定部30と、を備える。
【0031】
光の反射面となるミラー部12の上面(符号12B)には、入射光の反射率を高めるために、Au(金)やAl(アルミ)等の金属薄膜が形成されている。ミラーコーティングに用いる材料や膜厚は特に限定されず、公知のミラー材料(高反射率材料)を用いて様々な設計が可能である。
【0032】
本例では、略長方形の反射面12Bを有するミラー部12を例示し、非駆動時における反射面12Bの長辺方向をx方向、これと直交する短辺方向をy方向、xy面に垂直な方向をz方向とする直交xyz軸を導入して説明する。なお、本発明の実施に際して、ミラー部12の形状は、特に限定されない。図1及び図2に例示した長方形に限らず、正方形、多角形、円形、楕円形など、様々な形状があり得る。
【0033】
MEMSスキャナデバイス10は、非駆動時において反射面12Bがz方向に向いたミラー部12をy方向の両側から挟むように一対の圧電アクチュエータ部14が配置される。圧電アクチュエータ部14は、圧電ユニモルフカンチレバー(片持ち梁)構造のアクチュエータであり(図3参照)、圧電体の変形によって屈曲変位を行う。すなわち、圧電アクチュエータ部14はx方向の一方の端部(基端14B)が固定部30に固定支持され、反対側の端部14Aは固定部30に固定されずに、カンチレバー構造によって変位できる非拘束端となっている。
【0034】
圧電アクチュエータ部14の非拘束側の14Aは、ミアンダ状に構成された連結部16の一端16Aに接続されている。また、連結部16の他端16Bはミラー部12における長手方向(x軸方向)の一方の端部12Aに接続されている。
【0035】
連結部16が接続されるミラー部12の長手方向の端部12Aは、厳密な意味での最端位置であることは要求されず、概ね端部分と把握される範囲(最端位置及びその周辺付近)の部位を含むものである。連結部16を介してミラー部12に接続される圧電アクチュエータ部14を変位させることによってミラー部12に回転トルクを与え、回転軸18の周りに回転運動させるという作用を達成できるように、回転軸18からx軸方向に離れたミラー部12の端部付近に連結部16が接続される。
【0036】
連結部16は、ミラー部12のx軸方向を長手方向とする複数本の平板棒状の薄板部材17がミアンダ状に折り返すように並べられた構造を有する。図2では、3本の薄板部材17を平行に並べてミアンダ状に折り返すように薄板部材17の端部同士を接続した構成を例示しているが、薄板部材17の本数は1本以上、適宜の本数とすることができる。
【0037】
トーションバー20は、ミラー部12上の回転軸18と一致する位置に接続されており、ミラー部12の外側に向かって回転軸18の軸方向に延設される形態となっている。ここでは、ミラー部12上の回転軸18と一致する位置にトーションバー20を接続した例を示しているが、トーションバー20の接続位置は厳密に回転軸18と一致していなくてもよく、また、必ずしも1箇所で接続されている形態に限定されず、複数箇所で接続されていてもよい。
【0038】
例えば、ミラー部12の長手方向の略中央部分(設計上の真の中央点に限らずその周辺近傍)が回転軸18となる場合に、回転軸18と略一致する位置の一箇所にトーションバーを接続し、これを支持する態様の他、当該略中央部分と把握される範囲内で回転軸18の位置を挟んで軸対称に2箇所以上の位置でトーションバーを接続する構造も可能である。
【0039】
トーションバー支持部22は、固定部30と同程度の厚みを有し、トーションバー20の一端を固定支持する部材である。トーションバー20とトーションバー支持部22との組み合わせがミラー部12のz方向並進運動を抑制する垂直並進運動抑制部32(「垂直移動抑制構造」に相当)として機能する。図2に示したとおり、この垂直並進運動抑制部32は、平面視で見た場合、ミラー部12とミアンダ状の連結部16との間に配置される。
【0040】
MEMSスキャナデバイス10は、ミラー部12を中心にしてその両側に、トーションバー20、トーションバー支持部22、連結部16、圧電アクチュエータ部14の各要素が線対称の構造で配置されている。かかる対称構造によって、中央のミラー部12に対して効率良く回転トルクを作用させることができる。
【0041】
詳細は後述するが、ミラー部12は、一対の圧電アクチュエータ部14を駆動することによって、y軸方向と平行な回転軸18の周りに回転運動が誘起され、反射面12Bが傾く。また、ミラー部12は、トーションバー20とトーションバー支持部22とによって、z方向(垂直方向)への並進運動が抑制される。
【0042】
このような構成からなるMEMSスキャナデバイス10は、例えば、シリコン基板から半導体製造技術を利用して加工することにより、固定部30、ミラー部12、圧電アクチュエータ部14、連結部16、トーションバー20、トーションバー支持部22等の要素が一体的に構成された構造物として作成することができる。
【0043】
なお、固定支持部材として機能する固定部30及びトーションバー支持部22の厚さ(z方向の厚さ)に比べて、圧電アクチュエータ部14、ミアンダ状の連結部16及びトーションバー20の厚さは、薄く形成されている。これにより、圧電アクチュエータ部14、ミアンダ状の連結部16、トーションバー20が変形(曲げ変形や捻れ変形)し易い構造となっている。
【0044】
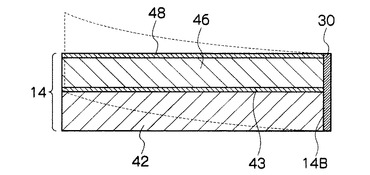
図3は、圧電ユニモルフカンチレバー構造からなる圧電アクチュエータ部14の断面構造を示す模式図である。なお、本発明の実施に際して圧電アクチュエータとして、ユニモルフカンチレバー以外の構造を用いても良い。例えば、電極を挟んで圧電体を2層積層したバイモルフカンチレバーを用いても良い。
【0045】
図3に示すように、圧電アクチュエータ部14は、振動板42上に下部電極43、圧電体46、上部電極48が積層形成された構造を有する。このような積層構造体は、例えば、シリコン(Si)基板上に、下部電極43、圧電体46、上部電極48の各層を順次に成膜することによって得られる。図3における右端が固定部30(図1、図2参照)に支持された固定端である。
【0046】
図3に示す構成において、電極(43,48)間に駆動電圧が印加されることで圧電体46が変形し、この変形に伴い、振動板42が撓んで、レバー部が上下に動く。図3の破線はレバー部が上方に変位した様子を表している。
【0047】
<駆動電圧の供給方法について>
第1実施形態は、一対の圧電アクチュエータ部14に対して、同時に同じ駆動電圧を印加することよって、ミラー部12の両側の圧電アクチュエータ部14を同方向に変位させる。このため、一対の圧電アクチュエータ部14に駆動用の電力を供給する電力供給源として、共通の(同じ)駆動回路及び制御回路を用いることができる。圧電アクチュエータ部14に供給する駆動波形として、共振を励起する周波数の交流信号やパルス波形信号を用いることができる。
【0048】
<MEMSスキャナデバイス10の動作について>
第1実施形態に係るMEMSスキャナデバイス10は次のように動作する。
【0049】
一対の圧電アクチュエータ部14に、不図示の駆動制御回路から同時に同じ駆動電圧を印加すると、圧電アクチュエータ部14が変位し、これに接続されているミアンダ状の連結部16が曲がり変形する。そして、連結部16と接続されているミラー部12の端部12Aが上下方向(Z方向)に変位する。この動きによって、ミラー部12に回転トルクを与え、ミラー部12を回転軸18周りに回転運動させる。
【0050】
例えば、正弦波の駆動電圧を圧電アクチュエータ部14に印加することにより、圧電アクチュエータ部14を上下に振動させ、ミラー部12に回転運動を誘起する。共振周波数付近の周波数の駆動電圧を印加して共振駆動させることにより、ミラー部12は大きな傾き角で振動する。ミアンダ状の連結部16は、曲がり変形しやすいため、共振駆動において大きな変位を得るのに効果的である(図4参照)。なお、圧電アクチュエータ部14に印加する駆動電圧の周波数は、構造体の機械的な共振周波数と厳密に一致させることは必ずしも要求されない。共振が励起される範囲で駆動電圧の周波数の差異が許容される。
【0051】
一方、ミラー部12の長手方向の略中心部(回転軸18付近)を保持するトーションバー20は、ミラー部12の回転運動に対しては容易にねじれるが、ミラー部12が垂直方向(Z方向)に並進移動しようとすると、張力によって強い反発力を示し、ミラー部12の並進運動を阻害(抑制)する役割を果たす。すなわち、トーションバー20及びトーションバー支持部22からなる垂直並進運動抑制部32は、ミラー部12の回転軸18を一定の位置に維持しようとする作用を有し、これによりミラー部12の垂直並進運動(Z方向の並進移動)が抑制される(図5参照)。
【0052】
図4は回転共振モードによる駆動時の様子を示す斜視図、図5は並進モードの動きを示す斜視図である。なお、図4及び図5では固定部30の記載を省略した。図4に示したように、回転共振駆動によってミラー部12は大きな回転角で変位しうる。一方、並進モードについては、トーションバー20及びトーションバー支持部22の作用によってミラー部12のZ方向への運動が抑制される。
【0053】
上述のように、圧電アクチュエータ部14の駆動に応じて、中央のミラー部12は、Y軸方向に平行な回転軸18として揺動される。ミラー部12に入射した光(例えば、図示せぬレーザ光源から発せられたレーザ光)はミラー部12の傾き(角度)に応じて反射され、反射光の進行方向(反射光の照射位置)が変わる。本実施形態に係るMEMSスキャナデバイス10によれば、Z方向へのミラー部12の並進移動を防止しつつ、大きな偏向角で光走査することができる。
【0054】
<<圧電材料について>>
本実施形態に好適な圧電体としては、下記式で表される1種又は2種以上のペロブスカイト型酸化物(P)を含むものが挙げられる。
【0055】
一般式ABO3・・・(P)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
B:Bサイトの元素であり、Ti,Zr,V,Nb,Ta,Sb,Cr,Mo,W,Mn,Sc,Co,Cu,In,Sn,Ga,Zn,Cd,Fe,及びNiからなる群より選ばれた少なくとも1種の元素。
O:酸素元素。
Aサイト元素とBサイト元素と酸素元素のモル比は1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
上記一般式で表されるペロブスカイト型酸化物としては、チタン酸鉛、チタン酸ジルコン酸鉛(PZT)、ジルコニウム酸鉛、チタン酸鉛ランタン、ジルコン酸チタン酸鉛ランタン、マグネシウムニオブ酸ジルコニウムチタン酸鉛、ニッケルニオブ酸ジルコニウムチタン酸鉛、亜鉛ニオブ酸ジルコニウムチタン酸鉛等の鉛含有化合物、及びこれらの混晶系;チタン酸バリウム、チタン酸ストロンチウムバリウム、チタン酸ビスマスナトリウム、チタン酸ビスマスカリウム、ニオブ酸ナトリウム、ニオブ酸カリウム、ニオブ酸リチウム、ビスマスフェライト等の非鉛含有化合物、及びこれらの混晶系が挙げられる。
【0056】
また、本実施形態の圧電体膜は、下記式で表される1種又は2種以上のペロブスカイト型酸化物(PX)を含むことが好ましい。
【0057】
Aa(Zrx,Tiy,Mb−x−y)bOc・・・(PX)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
Mが、V、Nb、Ta、及びSbからなる群より選ばれた少なくとも1種の元素である。
0<x<b、0<y<b、0≦b−x−y。
a:b:c=1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
上述の一般式(P)及び(PX)で表されるペロブスカイト型酸化物からなる圧電体膜は、高い圧電歪定数(d31定数)を有するため、かかる圧電体膜を備えた圧電アクチュエータは、変位特性の優れたものとなる。なお、一般式(PX)で表されるペロブスカイト型酸化物の方が一般式(P)で表されるものよりも圧電定数が高くなる。
【0058】
また、一般式(P)及び(PX)で表されるペロブスカイト型酸化物からなる圧電体膜を備えた圧電アクチュエータは、駆動電圧範囲において、リニアリティの優れた電圧―変位特性を有している。これらの圧電材料は、本発明を実施する上で良好な圧電特性を示すものである。
【0059】
本実施形態における圧電体46の一具体例として、例えば、Nbを12%ドープしたPZT薄膜を用いることができる。スパッタリング法によってNbを12%ドープしたPZTを成膜することにより、圧電定数d31=250pm/Vという高い圧電特性を持つ薄膜を安定的に作製できる。
【0060】
なお、バルクの圧電体を基板に接合してもよいが、加工の難易度を考えると、気相成長法やゾルゲル法などにより基板上に圧電薄膜を直接成膜する構成が好ましい。特に、本実施形態の圧電体46としては、1μm以上10μm以下の厚さの薄膜であることが好ましい。後述する実施例では、圧電体46として、スパッタリング法によって成膜された4μm厚のPZT薄膜を使用しているが、これに限定されるものではない。
【0061】
<実施例1;具体的な製造方法の一例>
実施例1として以下の手順によりMEMSスキャナデバイス10を作製した。
【0062】
(工程1)ハンドル層350μm、ボックス層1μm、デバイス層10μmのSOI(Silicon On Insulator)基板上に、スパッタ法で基板温度350℃にて、Ti層を30nm、Ir電極層を150nm形成した。これらTi層及びIr電極層が図3の下部電極43に相当する。
【0063】
(工程2)上記得られた基板上に、高周波(RF;radio frequency)スパッタ装置を用いてPZT層を4μm成膜した。成膜ガスは97.5%Arと2.5%O2の混合ガスを用い、ターゲット材料としてはPb1.3((Zr0.52 Ti0.48)0.88 Nb0.12)O3の組成のものを用いた。成膜圧力は2.2mTorr、成膜温度は450℃とした。
【0064】
(工程3)上記で得られた基板上に、リフトオフ法によって上部電極としてのPt/Ti層をパターン形成し、ICP(inductively coupledplasma;誘導結合プラズマ)ドラインエッチングによってPZT薄膜をパターンエッチした。
【0065】
(工程4)その後、シリコンのドライエッチプロセスによって加工を行い、図1〜図3で説明したMEMSスキャナデバイス10を作成した。
【0066】
固定部30及びトーションバー支持部22は、ハンドル層とデバイス層の両方を利用した構造となっており、厚みが約370μmである。
【0067】
トーションバー支持部22はトーションバー20の一端を固定する役割を担っている。また、固定部30は圧電カンチレバーの一端(符号14B)及びトーションバー支持部22の一端(符号22B)を固定する役割を担っている。圧電アクチュエータ部14は、Siデバイス層(10μm)/下部電極/PZT薄膜/上部電極の積層構造となっており、圧電薄膜ユニモルフアクチュエータとして機能する。
【0068】
なお、本発明の実施に際しては、上記の実施例1に限定されず、基板の材料、電極材料、圧電材料、膜厚、成膜条件などは、目的に応じて適宜選択することができる。
【0069】
<実施例1に係るMEMSスキャナデバイスの評価>
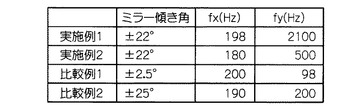
上記の手順で作製された実施例1に係るMEMSスキャナデバイス10について、圧電アクチュエータ部14に電位振幅Vp-p=0.5Vの正弦波(サイン波)による駆動電圧を印加し、ミラーの回転軸回りの回転共振運動を誘起させてミラー部の機械振れ角をレーザーのスキャン角度で測定したところ、共振周波数fx=198Hz、機械振れ角=±22°であった(図11参照)。
【0070】
その一方、ミラー部が垂直方向(z方向)に並進運動するモードの共振周波数をfyとし、レーザードップラー測定によって計測したところ、fy=2100Hzであり、fxに比べて10倍以上高かった。
【0071】
この実施例1によれば、並進モードの共振周波数fyの値が十分高く、かつ駆動周波数である回転モードの共振周波数fxと十分離れていることから、環境振動からも、また、駆動振動からも、ミラー部の垂直方向振動が励起されにくく、安定して回転運動のみをすることが分かる。
【0072】
なお、環境振動の周波数については、例えば自動車用途の場合、ある振動モードが環境振動からの励起を受けないためには、当該振動の共振周波数が200Hz以上であることが求められる。自動車用途に限らず、一般的に、機器の持ち歩きや手動操作など、外乱による振動は低い周波数であることから、200Hz以上という基準を採用することにより、広範囲の用途に適用できる。すなわち、並進モードの共振周波数fyが200Hzを超える値であれば、環境振動(外乱)による並進運動の発生を防止することができる。
【0073】
また、駆動振動からの影響については、駆動振動の周波数と、当該並進モードの振動共振周波数との差が大きければ、駆動振動によって並進モードの共振が励起されにくくなる。
【0074】
駆動振動の周波数は、回転モードの共振周波数fxと同等かこれに近い周波数であることから、実質的には、並進モードの共振周波数fyが駆動振動の共振周波数(回転モードの共振周波数fx)の1.1倍以上であれば、駆動振動による並進モードの励起を十分に無視することができる。
【0075】
すなわち、回転モードの共振周波数fxと並進モードの共振周波数fyの比fy/fxが1.1以上となることが好ましい。駆動振動による並進モードの励起を抑えるためには、fyとfxとの差が大きいほど好ましいため、両者の比fy/fxが2以上となる条件を満たすことがより好ましい。
【0076】
実施例1の場合、fy/fxが10以上となるため、駆動振動による並進モードの励起は無視できる程度に極めて小さいものである。
【0077】
〔第2実施形態〕
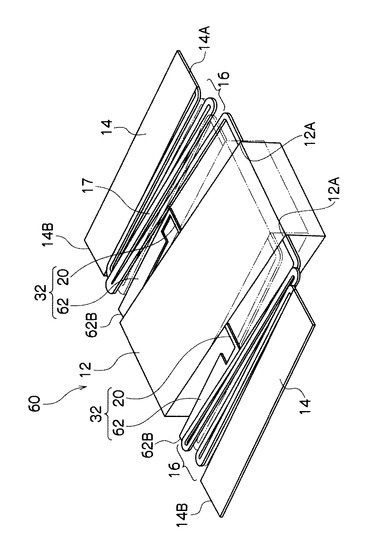
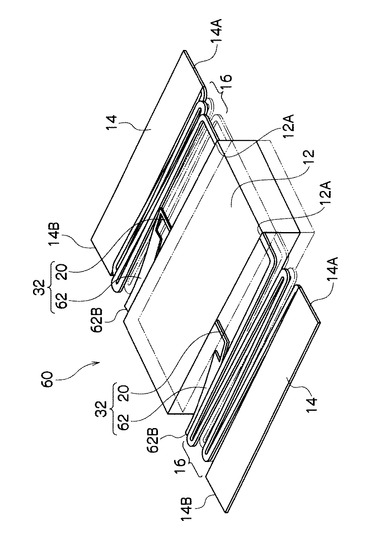
図6及び図7は第2実施形態に係るMEMSスキャナデバイスの要部を示す斜視図である。図6は回転モードによる動きを説明する斜視図、図7は並進モードによる動きを説明する斜視図である。図6及び図7において、図1〜図5で説明した構成と同一または類似する部材には同一の符号を付し、その説明は省略する。また、図6及び図7では固定部30の記載を省略した。
【0078】
第2実施形態のMEMSスキャナデバイス60は、第1実施形態のMEMSスキャナデバイス10におけるトーションバー支持部22に代えて、薄板構造のトーションバー支持部62が採用されている点で第1実施形態と相違する。その他の構成は、第1実施形態と同様の構造であり、製造方法についても、実施例1と同様のプロセスで作製できる。
【0079】
トーションバー支持部62の基端62Bは、図示せぬ固定部30に固定支持される。トーションバー20とトーションバー支持部62の組み合わせが垂直並進運動抑制部32を構成する。トーションバー支持部62の厚みや形状を適宜設計することにより、所望の剛性、共振周波数に調整することができる。また、当該トーションバー支持部をSi薄板/下部電極/圧電膜/上部電極と積層されたユニモルフ構造にすることにより、ミラーの中心軸に直接変位を与え、アクティブに垂直変位を制御することもできる。
【0080】
<実施例2>
実施例2として、実施例1と同様のプロセスにより第2実施形態のMEMSスキャナデバイス60を作製した。この実施例2に係るMEMSスキャナデバイス60の圧電アクチュエータ部14に、電位振幅Vp-p=0.5Vの正弦波による駆動電圧を印加し、ミラーの回転軸回りの回転共振運動を誘起させて(図6参照)、ミラー部12の機械振れ角をレーザーのスキャン角度で測定したところ、共振周波数fx=180Hz、機械振れ角=±24°であった(図11参照)。
【0081】
一方、ミラー部12が垂直方向に並進運動するモード(図7参照)の共振周波数をfyとし、レーザードップラー測定によって計測したところ、fy=500 Hzであり、fxに比べて2.8倍高かった。
【0082】
実施例2に係るMEMSスキャナデバイス60の並進モードの共振周波数fyは、200Hzよりも高いため、環境振動による影響を受けにくいものである。また、実施例2に係るMEMSスキャナデバイス60の並進モードの共振周波数fyと、回転モードの共振周波数fxの比fy/fxは2倍を超えており、駆動振動による並進モードの励起の影響も抑制される。
【0083】
さらに、実施例2に係るMEMSスキャナデバイス60は、トーションバー支持部62が薄板で構成されているため、トーションバー20にかかる応力が実施例1に比べて低く、駆動によるトーションバーの破壊を防ぐことができる。
【0084】
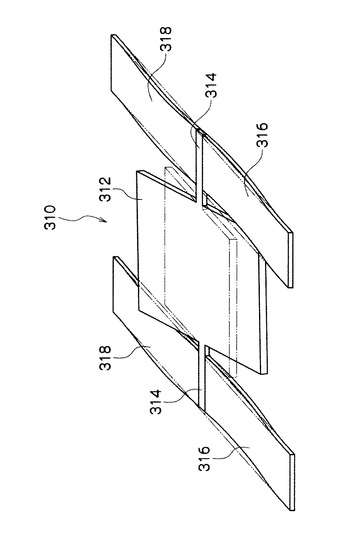
<比較例1>
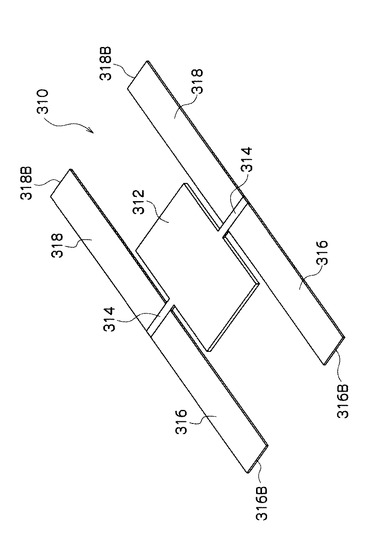
実施例1と同様の方法でSOI基板を用い、図8のようなMEMSスキャナデバイス310を作成した。この比較例1に係るMEMSスキャナデバイス310は、図14で説明したトーションバー構造に該当するものである。図8のMEMSスキャナデバイス310は、ミラー部312を挟んで両側に、ミラー部312の回転中心に接続されるトーションバー314が設けられ、各トーションバー314に対して2つの圧電アクチュエータ部316、318が接続されている。
【0085】
圧電アクチュエータ部316、318は、それぞれ圧電ユニモルフカンチレバー(片持ち梁)構造のアクチュエータであり、圧電アクチュエータ部316、318の端部316B、318Bは、図示せぬ固定支持部材(固定部)に固定されている。
【0086】
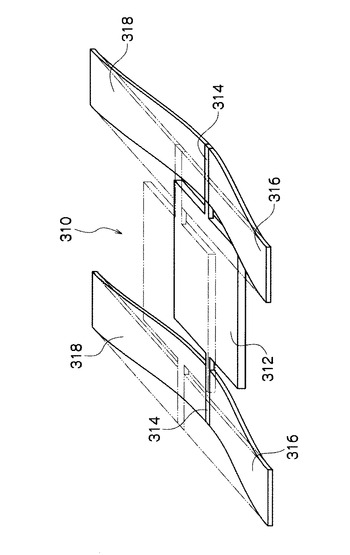
各トーションバー314を挟んで両側に連結されている2つの圧電アクチュエータ部316、318を互いに逆方向に駆動してトーションバー314をねじることにより、ミラー部312の回転運動を引き起こす。
【0087】
図9は比較例1の構成における回転モードの駆動時の様子を示す斜視図であり、図10は比較例1の構成における並進モードの動きの説明図である。
【0088】
比較例1の構造において、圧電アクチュエータ部316、318に電位振幅Vp-p=0.5Vの正弦波による駆動電圧を印加し、ミラーの回転軸回りの回転共振運動を誘起させてミラー部の機械振れ角をレーザーのスキャン角度で測定したところ、共振周波数fx=200 Hz、機械振れ角=±2.5°であった。
【0089】
この方式では、振れ角が小さく、十分なスキャン角度が得られないことが分かる。また、この方式では高い変位角度を得ようとするとトーションバー314を細く、及び/又は長くする必要があり、ハンドリングによって容易に破壊してしまうという問題もある。
【0090】
また、比較例1の構成について、ミラー部が垂直方向に並進運動するモード(図10参照)の共振周波数をfyとし、レーザードップラー測定によって計測したところ、fy=98Hzであった。比較例1は、環境振動の影響によって並進モードの励起が起こりやすく、並進モードの振動振幅も大きいものである。
【0091】
<比較例2>
実施例1と同様の方法でSOI基板を用い、図16のようなMEMSスキャナデバイス410を作成した。この比較例2に係るMEMSスキャナデバイス410は、「曲げヒンジ構造」に該当するものであり、第1実施形態及び第2実施形態と比較して、垂直並進運動抑制部32たるトーションバー20とトーションバー支持部22(又は62)の要素を取り除いた構造である。
【0092】
比較例2に係るMEMSスキャナデバイス410の圧電アクチュエータ(圧電カンチレバー414)に電位振幅Vp-p=0.5Vの正弦波による駆動電圧を印加し、ミラーの回転軸周りの回転共振運動(図18参照)を誘起させてミラー部の機械振れ角をレーザーのスキャン角度で測定したところ、共振周波数fx=190Hz、機械振れ角=±25°であった(図11参照)。一方、ミラー部が垂直方向に並進運動するモード(図19参照)の共振周波数をfyとし、レーザードップラー測定によって計測したところ、fy=200 Hzであり、fxに対して1.05倍と非常に近い値であることが分かった。
【0093】
比較例2は、スキャン角度としては十分な大きさを得ることができるものの、fyの値が200Hzと比較的低いことから、回転運動中に環境振動の影響でミラー部が大きく垂直方向に動いてしまう可能性がある。また、fyが、駆動周波数であるfxと非常に近いことから、駆動振動によってもミラー部の垂直方向振動が励起され易いという問題がある。実用上においては、ミラー部が垂直方向に変位すると、光路長の変化や焦点位置の変化を生み出してしまうため、垂直並進移動が発生しやすい光偏光器(ミラーデバイス)は実用に耐えない。
【0094】
<測定結果のまとめ>
実施例1、2と比較例1、2の評価(測定)結果を対比してまとめた表を図11に示した。実施例1、2で説明したような構成とすることで、大きい変位のミラー傾き角を得ることができ、環境振動や駆動振動からのミラー部の垂直並進運動の励振も大幅に抑えることができる。
【0095】
〔第3実施形態〕
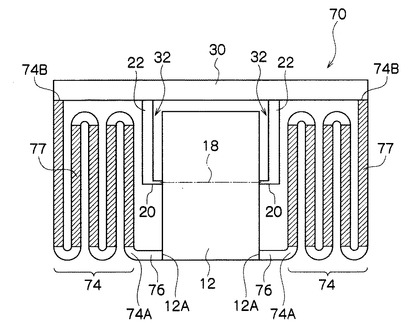
図12は、第3実施形態に係るMEMSスキャナデバイス70の構成を示す平面図である。図12において、図1〜図5で説明した構成と同一または類似する部材には同一の符号を付し、その説明は省略する。第3実施形態は、ミアンダ状圧電カンチレバー構造による圧電アクチュエータ部74と垂直並進運動抑制部32とを組み合わせた構造となっている。
【0096】
図12における圧電アクチュエータ部74のうち、斜線で示した部分が振動板/下部電極/圧電体/上部電極の積層構造を持つ圧電カンチレバー要素77である。
【0097】
圧電アクチュエータ部74は、複数本の圧電カンチレバー要素77が平行に並べられ、ミアンダ状に折り返すように隣り合う圧電カンチレバー要素77の端部同士を接続した構成となっている。本例で5本の圧電カンチレバー要素77を接続した構成を例示しているが、圧電カンチレバー要素77の本数は2本以上、適宜の本数とすることができる。
【0098】
圧電アクチュエータ部74の一端74Aは、連結部76を介してミラー部12の長手方向の端部12Aに接続され、他端74Bは固定部30に固定支持されている。
【0099】
このような構造において、圧電アクチュエータ部74における隣り合う圧電カンチレバー要素77を交互に逆方向の曲げを誘起するように駆動することによって、各圧電カンチレバー要素77の変位が累積され、変位量が拡大される。この構造は、共振を用いなくてもミラー部12を大きく傾けることができる。
【0100】
また、トーションバー20とトーションバー支持部22の構成によって回転軸18付近が支持されているため、ミラー部12の並進運動が抑制される。
【0101】
<第4の実施形態>
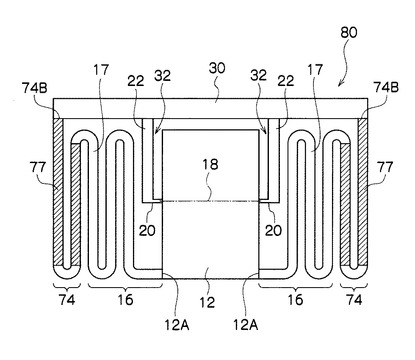
図13は、第4実施形態に係るMEMSスキャナデバイス80の構成を示す平面図である。図13において、図1〜5、図12で説明した構成と同一又は類似する部材には同一の符号を付し、その説明は省略する。
【0102】
第4実施形態は、ミアンダ状圧電カンチレバー構造と曲げヒンジ構造、並びに垂直並進運動抑制部とを組み合わせた構造となっている。
【0103】
図12で説明した連結部76の構成に代えて、図1で説明したミアンダ状の連結部16を採用することができる。図13に示す第4実施形態によれば、圧電アクチュエータ部74における隣り合う圧電カンチレバー要素77について、互いに逆方向に曲げ駆動させる。これにより、共振を用いなくても圧電アクチュエータ部74の変位を拡大し、ミラー部の端を上下(ミラーの厚み方向)に振動させ、回転を誘起させることができる。
【0104】
なお、第3及び第4実施形態では、圧電アクチュエータ部74として、蛇行状の折り返し構造を持つ圧電カンチレバーを採用したが、本発明の実施に際して、レバー部の折り返し構造の採否や、折り返し回数(折り畳み数)については、特に限定されない。カンチレバーの折り畳み数を増やすほど、変位量を増大させることが可能である。
【0105】
第3及び第4実施形態において、共振振駆動によるミラー部の回転運動の誘起も可能である。カンチレバーの折り畳み数やレバー部の幅等は全体の共振周波数に影響する。折り畳み数を増やすほど、共振周波数は低下する傾向にある。また、レバー部の幅を細くするほど、共振周波数は低下する傾向にある。折り畳み数やレバー部の幅などを設計することによって、所望の共振周波数を実現できる。
【0106】
<ミアンダ状圧電カンチレバー構造の駆動電圧の供給方法について>
隣り合う圧電カンチレバー要素77を互いに逆方向に曲げ駆動させる手段として、隣り合う圧電カンチレバー要素77に対して互いに逆極性の駆動電圧を印加する構成とすることができる。
【0107】
或いはまた、隣り合う圧電カンチレバー要素77の圧電体の分極方向を異ならせる(逆方向に分極させる)ことにより、同一極性の駆動電圧の印加によって逆方向に曲げ駆動を実現することができる。
【0108】
圧電カンチレバー要素77に供給する駆動波形としては、共振を励起しないDC電圧信号を用いる態様、共振を励起しない周波数の交流信号やパルス波形信号を用いる態様、共振を励起する周波数の交流信号やパルス波形信号を用いる態様を採用し得る。
【0109】
<第1〜第4実施形態の作用効果>
(1)圧電カンチレバーの変位方向が常にミラーの回転方向にほぼ一致するため、カンチレバーの力がほぼすべてミラーの回転に用いられる。力の利用効率がよく、従来のトーションバー構造と比較して大幅に回転角が大きくなる。
【0110】
(2)ミラーの回転軸付近を支持するトーションバーを設けたことにより、ミラーがz方向(垂直方向)に大きく変位する並進モードの影響をほぼ無くすことができる。これによって、高いスキャン角度の実現と、外乱に伴う光路長変化等の抑制を両立できる。
【0111】
(3)垂直並進運動抑制部32を構成するトーションバー部分にピエゾ抵抗効果のある薄膜を配置することにより、トーションバー20の応力を直接検知することができる。この応力検知機能により、駆動中のミラーの角度を正確に測定することができる。
【0112】
(4)ねじりヒンジ剛性を挙げることによって、高い共振周波数で駆動するMEMSスキャナを設計することができる。
【0113】
(5)固定部、圧電アクチュエータ部、ミラー部並びにこれらの接続部(連結部)等をシリコン加工により一体的に形成することができる。
【0114】
(6)従来のポリゴンミラーやガルバノミラーと比べて小型化が可能であり、耐久性も高い。
【0115】
(7)実施例1、2で説明したように、基板上にPZT薄膜を直接成膜し、これをドライエッチング加工することでMEMSスキャナデバイスを形成することができる。このように、圧電体を薄膜化することでより細かいパターニングを容易に行うことができるため、歩留まりが大幅に向上するとともにデバイスのさらなる小型化に対応することができる。
【0116】
ただし、本発明の実施に際しては、薄膜圧電体に限ったものではく、バルク圧電体を振動板に貼りつけてユニモルフアクチュエータを形成したり、2つの極性の異なる圧電体を貼りあわせてバイモルフアクチュエータとしても良い。
【0117】
<デバイスサイズの一例>
本発明の実施形態として作製されるMEMSスキャナデバイス10、60、70、80の大きさや、具体的な形状については、様々な形態があり得る。一例として、図1及び図2におけるミラー部12、圧電アクチュエータ部14、及び固定部30を含んだデバイスの大きさは平面視で約3mm×2mm程度である。さらなる小型化も可能であり、1mm×1mm程度のデバイスの作製も可能である。
【0118】
<変形例>
第1実施形態から第4実施形態は、垂直移動抑制構造として、ミラー部12の両側にそれぞれ一本のトーションバー20を接続し、このトーションバー20によってミラー回転中心を支持しているが、ミラー回転軸を安定に支持する方法はこれに限ったものではなく、例えば回転軸に軸対称に配置された複数のバーでミラーを支持する構成を採用してもよい。
【0119】
<応用例>
本発明は、レーザー光等の光を反射して光の進行方向を変える光学装置として様々な用途に利用できる。例えば、光偏向器、光走査装置、レーザープリンタ、バーコード読取機、表示装置、各種の光学センサ(測距センサ、形状測定センサ)、光通信装置、レーザープロジェクタ、OCT画像診断装置などに広く適用することができる。
【0120】
なお、本発明は以上説明した実施形態に限定されるものではなく、本発明の技術的思想内で当該分野の通常の知識を有するものにより、多くの変形が可能である。
【0121】
<開示する発明の態様について>
上記に詳述した発明の実施形態についての記載から把握されるとおり、本明細書は少なくとも以下に示す発明を含む多様な技術思想の開示を含んでいる。
【0122】
(発明1):光を反射する反射面を有するミラー部と、前記ミラー部を挟んで両側に配置される一対の圧電アクチュエータ部と、前記ミラー部の回転軸から前記反射面に沿って前記回転軸に垂直な方向に離れた前記ミラー部の端部に前記圧電アクチュエータ部の一端を接続させる連結部と、前記圧電アクチュエータ部の他端を支持する固定部と、前記固定部に一端が接続され、他端が前記ミラー部に接続されており、前記ミラー部の回転軸が前記反射面の垂直方向に並進運動することを抑制する垂直移動抑制構造と、を備えるミラー駆動装置。
【0123】
この発明によれば、ミラー部を両側から挟むように一対の圧電アクチュエータ部が配置される。圧電アクチュエータ部の一端は連結部を介してミラー部の端付近に接続され、他端は固定部に支持される。圧電アクチュエータ部を駆動してアクチュエータを変位させることによって、ミラー部の端部が変位し、これによりミラー部の回転軸の回りに回転トルクが与えられ、ミラー部を回転駆動させることができる。
【0124】
このような構造は、圧電アクチュエータ部の変位方向がミラー部の回転方向に概ね一致するため、圧電アクチュエータ部の力を効率よく回転運動に利用することができ、大きな回転角(ミラーの傾き角)を得ることができる。また、本発明におけるミラー部は垂直移動抑制構造を介して固定部に接続されているため、回転軸を一定の位置に保つことができ、ミラー部の垂直方向への並進運動が抑制される。
【0125】
(発明2):発明1に記載のミラー駆動装置において、前記垂直移動抑制構造は、前記ミラー部上の回転軸と一致する位置、若しくは前記ミラー部上の回転軸に対して軸対称である複数の位置と、前記固定部とを接続する構造とすることが好ましい。
【0126】
ミラー部の垂直方向の並進運動を効果的に抑制するには、ミラー部の回転軸の付近を支持する構成が好ましい。回転軸の位置と概ね一致する位置でミラー部と垂直移動抑制構造とを接続する構成の他、回転軸に対して軸対称となる複数の位置でミラー部と垂直移動抑制構造とを接続する構成も採用し得る。
【0127】
(発明3):発明1又は2に記載のミラー駆動装置において、前記垂直移動抑制構造は、前記ミラー部上の回転軸と一致する位置に接続され、当該ミラー部から外側に向かって前記回転軸の軸方向に延設されるトーションバーと、前記トーションバーに接続されるとともに前記固定部に接続され、前記トーションバーを支持するトーションバー支持部と、を有する構成とすることができる。
【0128】
垂直移動抑制構造の具体的態様として、回転軸の付近に接続されるトーションバーと、トーションバーを固定部に接続するトーションバー支持部とを含んだ構造を採用することができる。トーションバーは、ミラー部の垂直方向の並進運動を張力によって抑制する。
【0129】
(発明4):発明3に記載のミラー駆動装置において、前記トーションバー支持部は、前記固定部と同等の厚みを有している構成とすることができる。
【0130】
かかる態様によれば、並進運動の共振周波数を高い値にすることができる。これにより、環境振動や駆動振動からのミラー部の垂直運動の励振を大幅に抑えることができる。
【0131】
(発明5):発明3に記載のミラー駆動装置において、前記トーションバー支持部は、前記固定部の厚みよりも薄い薄板構造とすることができる。
【0132】
トーションバー支持部の厚みを適宜設計することで、トーションバーにかかる応力を調整することができる。トーションバー支持部の厚みを薄くするほど、トーションバーにかかる応力を低下させることができ、駆動によるトーションバーの破壊を防止することができる。また、トーションバー支持部の厚みを調整することで並進モードも共振周波数を調整することができる。
【0133】
(発明6):発明1から5のいずれか1項に記載のミラー駆動装置において、前記連結部は、前記反射面に沿って前記回転軸に垂直な方向を長手方向とする薄板部材が1本以上ミアンダ状に折り返すように並べられた構造を有するものとすることができる。
【0134】
このような構成によれば、連結部が変位しやすくなり、回転角度を大きくすることができる。
【0135】
(発明7):発明1から6のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部は、1つ又は複数の圧電カンチレバーによって構成することができる。
【0136】
圧電アクチュエータ部は、1つの圧電カンチレバーで構成されていてもよいし、複数の圧電カンチレバーをミアンダ状につなぎ合わせた構成とすることができる。
【0137】
(発明8):発明1から7のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部は、振動板、下部電極、圧電体、上部電極の順に積層された圧電ユニモルフカンチレバーで構成することができる。
【0138】
圧電アクチュエータ部としては、ユニモルフ構造に限らず、バイモルフ構造も可能であるが、ユニモルフ構造が最も簡単な構成である。
【0139】
(発明9):発明1から8のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部を変位させることによって前記ミラー部と前記連結部との接続部分を振動させ、前記ミラー部に前記回転軸周りの回転運動を誘起させることができる。
【0140】
ミラー部の端部を振動させることで、慣性力によってミラー部に回転トルクが与えられ、回転運動が誘起される。
【0141】
(発明10):発明1から9のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部は、複数の圧電カンチレバーがミアンダ状に折り返すように並べられた構造を有しており、隣り合う圧電カンチレバー同士が互いに逆方向の屈曲変位を行うように駆動される構成とすることができる。
【0142】
かかる態様によれば、共振を利用しなくても大きな変位を得ることが可能である。
【0143】
(発明11):発明1から10のいずれか1項に記載のミラー駆動装置において、前記ミラー部が前記回転軸を中心に回転運動を行う共振モードの共振周波数fxの付近で前記ミラー部を共振駆動させる構成とすることができる。
【0144】
かかる態様によれば、回転共振を利用してミラー部を大きな回転角で振動させることができるとともに、垂直方向の並進運動を抑制することができる。
【0145】
(発明12):発明1から11のいずれか1項に記載のミラー駆動装置において、前記ミラー部が前記反射面の垂直方向に並進運動する共振モードの共振周波数fyが200Hzよりも高い値であることが好ましい。
【0146】
かかる態様によれば、環境振動による並進運動の誘発を抑制することができる。また、並進モードの共振周波数fyが高い値になるほど、並進モードの振動振幅は小さくなる。
【0147】
(発明13):発明1から12のいずれか1項に記載のミラー駆動装置において、前記ミラー部の前記並進運動の共振周波数fyと、前記ミラー部の前記回転軸を中心とする回転運動の共振周波数fxとの比fy/fxが1.1以上であることが好ましい。
【0148】
かかる態様によれば、駆動周波数の影響による並進運動の誘発を抑制することができる。
【0149】
(発明14):発明1から13のいずれか1項に記載のミラー駆動装置において、前記ミラー部の前記並進運動の共振周波数fyと、前記ミラー部の前記回転軸を中心とする回転運動の共振周波数fxとの比fy/fxが2.0以上であることが好ましい。
【0150】
fxに対してfyが2倍以上となる条件を満たすと、共振駆動による駆動周波数と並進モードの共振周波数との差が十分に大きくなるため、並進運動の誘発を実質的に十分無視することができるレベルに抑制することができる。
【0151】
(発明15):発明1から14のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部に用いられる圧電体は1〜10μm厚の薄膜であり、振動板となる基板上に直接成膜された薄膜とすることができる。
【0152】
薄膜圧電体を用いて圧電アクチュエータを構成することが好ましい。スパッタリング法に代表される気相成長法やゾルゲル法などの直接成膜法を用いることにより、所要の圧電性能を持つ圧電体薄膜を得ることができる。
【0153】
(発明16):発明15に記載のミラー駆動装置において、前記圧電体は、スパッタリング法で成膜された薄膜とすることができる。
【0154】
(発明17):発明1から16のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部に用いられる圧電体は、下記式(P)で表される1種又は2種以上のペロブスカイト型酸化物であることが好ましい。
【0155】
一般式ABO3・・・(P)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
B:Bサイトの元素であり、Ti,Zr,V,Nb,Ta,Sb,Cr,Mo,W,Mn,Sc,Co,Cu,In,Sn,Ga,Zn,Cd,Fe,及びNiからなる群より選ばれた少なくとも1種の元素。
O:酸素元素。
Aサイト元素とBサイト元素と酸素元素のモル比は1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
かかる圧電体は良好な圧電特性を有し、圧電アクチュエータ部として好ましいものである。
【0156】
(発明18):発明1から17のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部に用いられる圧電体は、下記式(PX)で表される1種又は2種以上のペロブスカイト型酸化物であることが好ましい。
【0157】
Aa(Zrx,Tiy,Mb−x−y)bOc・・・(PX)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
Mが、V,Nb,Ta,及びSbからなる群より選ばれた少なくとも1種の元素である。
0<x<b、0<y<b、0≦b−x−y。
a:b:c=1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
かかる圧電体は良好な圧電特性を有し、圧電アクチュエータ部として好ましいものである。
【0158】
(発明19):発明1から18のいずれか1項に記載のミラー駆動装置におけるミラー駆動方法であって、前記一対の圧電アクチュエータ部に駆動電圧を印加し、前記圧電アクチュエータ部を屈曲変位させることにより、前記ミラー部と前記連結部との接続部分を振動させ、この振動により前記ミラー部に前記回転軸回りの回転トルクを与え、前記ミラー部を回転駆動させるミラー駆動方法。
【0159】
(発明20):発明10に記載のミラー駆動装置におけるミラー駆動方法であって、前記複数の圧電カンチレバーがミアンダ状に折り返すように並べられた構造を有する前記圧電アクチュエータ部において隣り合う圧電カンチレバー同士が互いに逆方向の屈曲変位を行うように、各圧電カンチレバーに駆動電圧を印加し、これら複数の圧電カンチレバーの変位を累積させて前記ミラー部を非共振で回転駆動させるミラー駆動方法。
【0160】
このミラー駆動方法は、ミアンダ状圧電カンチレバー構造を有する圧電アクチュエータ部を非共振で駆動する態様である。
【0161】
(発明21)発明1から18のいずれか1項に記載のミラー駆動装置の製造方法であって、SOI基板上に、前記圧電アクチュエータ部の下部電極を形成する工程と、前記下部電極が形成された前記SOI基板上に圧電体薄膜を成膜する工程と、前記圧電体薄膜に上部電極を形成する工程と、シリコンのドライエッチプロセスによって前記SOI基板を加工することにより、前記ミラー部、前記連結部、前記圧電アクチュエータ部、前記垂直移動抑制構造及び前記固定部の形状を形成する工程と、を含むことをミラー駆動装置の製造方法。
【符号の説明】
【0162】
10…MEMSスキャナデバイス、12…ミラー部、14…圧電アクチュエータ部、16…連結部、17…薄板部材、18…回転軸、20…トーションバー、22…トーションバー支持部、30…固定部、32…垂直並進運動抑制部、42…振動板、43…下部電極、6…圧電体、48…上部電極、60,70,80…MEMSスキャナデバイス、62…トーションバー支持部、74…圧電アクチュエータ部、76…連結部、77…圧電カンチレバー要素
【技術分野】
【0001】
本発明はミラー駆動装置に係り、特に、光走査に用いる光偏向器に好適なマイクロミラーデバイスの構造及びその駆動方法、並びに製造技術に関する。
【背景技術】
【0002】
シリコン(Si)の微細加工技術を用いて作製されたマイクロスキャナ(以下、「MEMS(Micro Electro Mechanical System)スキャナ」という。)は、従来の光走査モジュールであるポリゴンミラーなどと比べて小型かつ低消費電力であることが特徴である。このためMEMSスキャナは、レーザープロジェクタから光干渉断層計(OCT;Optical Coherence Tomography)のような光診断用スキャナなど、幅広い応用が期待されている。
【0003】
MEMSスキャナの駆動方式は様々であるが、その中でも圧電体の変形を利用した圧電駆動方式は、トルクが大きい一方でデバイス構造、駆動回路が単純であるため、小型で大きなスキャン角度が得られる方式として有望視されている。以下に一般的な圧電マイクロミラー(圧電MEMSスキャナ)の構造について説明する。
【0004】
<トーションバー構造>
一般的な圧電MEMSスキャナでは、回転軸に沿ったトーションバー(ねじり棒)をミラーに接続し、トーションバーを複数本の圧電カンチレバーによってねじる構造が採用されているものが多い(特許文献1〜3参照)。図14は特許文献1の「図7」に記載されている構造である。同図における符号01がミラー部、02aと02bがトーションバー、03a〜03dが圧電カンチレバーである。
【0005】
図14のトーションバーを軸方向から見た模式断面図を図15に示す。ここでは、符号02bのトーションバーを示すが、他方のトーションバー02aについても同様である。図15に示すとおり、この構造ではトーションバー02bを挟んだ2本の圧電カンチレバー03b、03dがそれぞれ上下逆方向に変位してトーションバー02bをねじるように駆動される。
【0006】
トーションバー駆動方式は、圧電カンチレバーによるすべての力がミラーの回転には使われず、力の利用効率が悪いという問題がある。すなわち、ある回転軸でねじれるトーションバーを捻る純粋なトルクは、ねじり軸周りの偶力(A方向のベクトル成分)によってもたらされる。しかし、図15のような圧電カンチレバー03b、03dによるねじりの動きは、カンチレバーの変位量が増大するに伴って、力の作用方向がねじり軸周りの偶力から外れていく。
【0007】
トーションバー02bをねじるために必要な偶力成分は図15中のAで示したベクトル方向である。このA方向の偶力成分は、カンチレバーの力(図中Cで示したベクトル)のA方向成分として得られる。カンチレバーの力(C方向ベクトル)は、レバー先端部が曲がる方向、つまり、先端部の面に垂直な方向であるため、カンチレバーの変位が大きくなるほど、トーションバーのねじりに寄与する偶力成分(A方向成分)は小さくなり、ねじりに関係しない余計な力の成分(図中Bで示す引っ張り方向の成分)が大きくなる。このため、圧電カンチレバーとして大きな曲げ変位が得られても、その変位がトーションバーのねじり量、すなわちミラー部の傾き量に効率良く反映できないという欠点がある。
【0008】
上述のように、トーションバー構造は、圧電カンチレバーでトーションバーをねじると、回転軸と垂直方向に引っ張る力(B方向のベクトル成分)が発生し、これが力学的なエネルギーロスとなって回転角の低下を招く。このエネルギーロスは回転角が高くなるほど大きくなるため、トーションバーを用いた構造で大きな回転角度を得るのは非常に難しかった。
【0009】
<曲げヒンジ構造>
上記トーションバー構造の課題を解決するものとして、図16に示すような構造のMEMSスキャナデバイス410が考えられる。これは、方形のミラー部412の端部412Aに薄板の連結部416を介して圧電カンチレバー414を接続した構造である。圧電カンチレバー414の基端414B部分は固定支持部材としての固定部430に固定されている。圧電カンチレバー414の上下駆動によりミラー部412の端部412Aを上下に振動させることで、慣性力によりミラー部412に傾き運動が誘起される。このような構造を「曲げヒンジ構造」と呼ぶこととする。
【0010】
曲げヒンジ構造は、ミラー部412の端部412Aの振動により、傾き(回転)方向の共振を誘起し、その共振振動でミラーを傾けるものであり、ミラー部412と圧電カンチレバー414の間に蛇行した形状の連結部(ミアンダ状に折りたたんだヒンジ)416を設けることにより、ミラー部412の傾き角の変位がさらに拡大する。ただし、蛇行した(ミアンダ状の)連結部416は不可欠な要素というわけではなく、ミラー部412の端部に直接圧電カンチレバーを接続する構成も可能である。
【0011】
図17に曲げヒンジ構造による動作の模式図を示した。同図では説明を簡単にするために、ミラー部412の端部に圧電カンチレバー414を直接接続した構成を示した。図17において、圧電カンチレバー414の加速度方向(力がかかる方向)は矢印Dで示す下向き、ミラー部412にかかる慣性力が働く方向は、その反対方向(矢印E方向)である。つまり、この慣性力は純粋にミラー部412を傾ける方向と一致しており、余計な力の成分が発生しない。したがって、圧電カンチレバー414で発生する力がミラー部412を傾ける力として効率良く利用される。
【0012】
この曲げヒンジ構造においては、ミラー回転運動の共振周波数で圧電カンチレバー414を駆動すると、図18に示すように、カンチレバーの変位に伴ってヒンジ(連結部416)が曲がり、ミラー部412に慣性トルクが発生してミラー部412の回転運動共振を誘発する。
【0013】
図17で説明したとおり、圧電カンチレバー414の変位方向が常にミラー部412の回転方向にほぼ一致し、すべての力がミラーの回転に用いられる。そのため、トーションバー構造よりも力の使用効率がはるかに良く、回転角が大きくなってもエネルギーロスが少ないため大変位が得られる。また、ミラー部412と圧電カンチレバー414との接続部に図16のようなミアンダ状の連結部416を採用した場合、ミアンダ状の複数の曲げヒンジが少しずつ曲がって変位を蓄積していくため、個々のヒンジにかかる応力が少なく、回転角が高くなっても破壊されにくいという利点がある。
【0014】
<ミアンダ状圧電カンチレバー構造>
非特許文献1で提案されている構造は、上述した曲げヒンジ構造に近い構造ではあるが、共振駆動を用いないタイプであり、カンチレバー自体を複数折り畳んだミアンダ状とし、ミラーを両側から挟みこむ構造である。この方式では、圧電カンチレバーを折り畳み、交互に逆方向の曲げを誘起するように駆動することによって変位を拡大させ、共振を用いなくてもミラーを大きく傾けることができる。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開2008−257226号公報
【特許文献2】特開2009−169089号公報
【特許文献3】特開2005−177876号公報
【非特許文献】
【0016】
【非特許文献1】M. Tani, M. Akamatsu, Y. Yasuda, H. Toshiyoshi., ‘A two-axis piezoelectric tilting micro mirror witha newly developed PZT-meandering actuator’ in 'MicroElectro Mechanical Systems, 2007. MEMS. IEEE 20thInternational Conference (2007) pp. 699 -702.)
【発明の概要】
【発明が解決しようとする課題】
【0017】
上述のように、曲げヒンジ構造やミアンダ状圧電カンチレバー構造は、トーションバー構造に比べて力を効率的に伝え、大きな変位が得られるという利点がある。しかし、これらの構造では、図19に示すような、ミラー反射面に垂直な方向の並進運動が起こりやすいという欠点がある。具体的には以下の2点にまとめられる。
【0018】
(1)構造上、ミラー面に対しての垂直方向並進運動のバネ定数が小さく、共振周波数が低いため、環境振動によって並進運動共振が容易に励起されてしまう。
【0019】
(2)構造上、ミラーの回転運動と並進運動の共振周波数が非常に近くなるため、回転運動を共振駆動する場合、その駆動の振動で並進運動方向にも共振してしまう。
【0020】
これらの問題は、回転角を大きくしようとして曲げヒンジを柔らかくしたり、圧電カンチレバーの折り畳み数を増やすほど顕著になる。駆動中にミラーが垂直方向に並進運動すると、スキャン中の光路長変動、焦点ズレ、スポットの位置ズレ等を引き起こすため、実際の使用では致命的な問題となる。
【0021】
また、曲げヒンジ構造やミアンダ状圧電カンチレバー構造は、トーションバーのようなミラーの回転軸を保つ構造が存在しないため、回転中心がミラーの中心部と一致しないという問題もある。
【0022】
本発明はこのような事情に鑑みてなされたもので、圧電アクチュエータの力を効率よく利用してミラーの回転方向に大きな変位を得ることができるとともに、ミラーの垂直方向並進運動を大幅に抑制することができるミラー駆動装置及びその駆動方法並びに製造方法を提供することを目的とする。
【課題を解決するための手段】
【0023】
前記目的を達成するために本発明に係るミラー駆動装置は、光を反射する反射面を有するミラー部と、前記ミラー部を挟んで両側に配置される一対の圧電アクチュエータ部と、前記ミラー部の回転軸から前記反射面に沿って前記回転軸に垂直な方向に離れた前記ミラー部の端部に前記圧電アクチュエータ部の一端を接続させる連結部と、前記圧電アクチュエータ部の他端を支持する固定部と、前記固定部に一端が接続され、他端が前記ミラー部に接続されており、前記ミラー部の回転軸が前記反射面の垂直方向に並進運動することを抑制する垂直移動抑制構造と、を備える。
【0024】
この発明によれば、圧電アクチュエータ部の一端は連結部を介してミラー部の端部に接続され、他端は固定部に固定支持される。圧電アクチュエータ部を駆動すると連結部を介してミラー部の端部が振られ、ミラー部に回転トルクが与えられる。これにより、ミラー部は回転軸の周りに回転運動し、反射面が傾く。
【0025】
圧電アクチュエータ部の屈曲変位による力の方向は、ミラー部を回転させる方向と概ね一致するため、圧電アクチュエータ部が発生する力を効率よく回転運動に利用することができ、大きな回転角(ミラーの傾き角)を得ることができる。また、ミラー部は垂直移動抑制構造を介して固定部に接続されているため、ミラー部の垂直方向への並進運動が抑制される。
【0026】
他の発明態様については、明細書及び図面の記載により明らかにする。
【発明の効果】
【0027】
本発明によれば、圧電アクチュエータ部の力を効率よく利用し、大きな回転角でミラー部を回転運動させることができるとともに、ミラー部の垂直方向の並進運動を大幅に抑制することができる。
【図面の簡単な説明】
【0028】
【図1】第1実施形態に係るMEMSスキャナデバイスの斜視図
【図2】図1のMEMSスキャナデバイスをミラー部の反射面側から見た平面図
【図3】圧電アクチュエータ部(カンチレバー部)の断面図
【図4】共振駆動時における回転モードの動作を説明するための斜視図
【図5】並進モードの動作を説明するための斜視図
【図6】第2実施形態に係るMEMSスキャナデバイスにおける回転モードの動作を説明するための要部斜視図
【図7】第2実施形態に係るMEMSスキャナデバイスにおける並進モードの動作を説明するための要部斜視図
【図8】比較例1に係るMEMSスキャナデバイスの要部構成を示す斜視図
【図9】比較例1の構成における回転モードの動作の説明図
【図10】比較例1の構成における並進モードの動作の説明図
【図11】実施例1,2と比較例1,2の測定結果をまとめた図表
【図12】第3実施形態に係るMEMSスキャナデバイスの構成を示す平面図
【図13】第4実施形態に係るMEMSスキャナデバイスの構成を示す平面図
【図14】従来のトーションバー構造を示す斜視図
【図15】従来のトーションバー構造の動作を示す模式断面図
【図16】比較例2に係る従来の曲げヒンジ構造を示す斜視図
【図17】曲げヒンジ構造による動作を説明するための模式図
【図18】比較例2の構成における回転モードの動作の説明図
【図19】比較例2の構成における並進モードの動作の説明図
【発明を実施するための形態】
【0029】
以下、添付図面に従って本発明の好ましい実施形態について詳説する。
【0030】
〔第1実施形態〕
図1は第1実施形態に係るMEMSスキャナデバイスの斜視図であり、図2はミラー部の反射面側から見た平面図(上面図)である。これらの図面に示したように、本例のMEMSスキャナデバイス10は、ミラー部12と、該ミラー部12を挟んで両側に配置される一対の圧電アクチュエータ部14と、ミラー部12の端部12Aに圧電アクチュエータ部14の一端(14A)を接続させる連結部16と、ミラー部12の回転軸18と略一致する位置でミラー部12に接続されたトーションバー20と、このトーションバー20の一端を支持するトーションバー支持部22と、圧電アクチュエータ部14の基端14B及びトーションバー支持部22の基端22Bを固定支持する固定部30と、を備える。
【0031】
光の反射面となるミラー部12の上面(符号12B)には、入射光の反射率を高めるために、Au(金)やAl(アルミ)等の金属薄膜が形成されている。ミラーコーティングに用いる材料や膜厚は特に限定されず、公知のミラー材料(高反射率材料)を用いて様々な設計が可能である。
【0032】
本例では、略長方形の反射面12Bを有するミラー部12を例示し、非駆動時における反射面12Bの長辺方向をx方向、これと直交する短辺方向をy方向、xy面に垂直な方向をz方向とする直交xyz軸を導入して説明する。なお、本発明の実施に際して、ミラー部12の形状は、特に限定されない。図1及び図2に例示した長方形に限らず、正方形、多角形、円形、楕円形など、様々な形状があり得る。
【0033】
MEMSスキャナデバイス10は、非駆動時において反射面12Bがz方向に向いたミラー部12をy方向の両側から挟むように一対の圧電アクチュエータ部14が配置される。圧電アクチュエータ部14は、圧電ユニモルフカンチレバー(片持ち梁)構造のアクチュエータであり(図3参照)、圧電体の変形によって屈曲変位を行う。すなわち、圧電アクチュエータ部14はx方向の一方の端部(基端14B)が固定部30に固定支持され、反対側の端部14Aは固定部30に固定されずに、カンチレバー構造によって変位できる非拘束端となっている。
【0034】
圧電アクチュエータ部14の非拘束側の14Aは、ミアンダ状に構成された連結部16の一端16Aに接続されている。また、連結部16の他端16Bはミラー部12における長手方向(x軸方向)の一方の端部12Aに接続されている。
【0035】
連結部16が接続されるミラー部12の長手方向の端部12Aは、厳密な意味での最端位置であることは要求されず、概ね端部分と把握される範囲(最端位置及びその周辺付近)の部位を含むものである。連結部16を介してミラー部12に接続される圧電アクチュエータ部14を変位させることによってミラー部12に回転トルクを与え、回転軸18の周りに回転運動させるという作用を達成できるように、回転軸18からx軸方向に離れたミラー部12の端部付近に連結部16が接続される。
【0036】
連結部16は、ミラー部12のx軸方向を長手方向とする複数本の平板棒状の薄板部材17がミアンダ状に折り返すように並べられた構造を有する。図2では、3本の薄板部材17を平行に並べてミアンダ状に折り返すように薄板部材17の端部同士を接続した構成を例示しているが、薄板部材17の本数は1本以上、適宜の本数とすることができる。
【0037】
トーションバー20は、ミラー部12上の回転軸18と一致する位置に接続されており、ミラー部12の外側に向かって回転軸18の軸方向に延設される形態となっている。ここでは、ミラー部12上の回転軸18と一致する位置にトーションバー20を接続した例を示しているが、トーションバー20の接続位置は厳密に回転軸18と一致していなくてもよく、また、必ずしも1箇所で接続されている形態に限定されず、複数箇所で接続されていてもよい。
【0038】
例えば、ミラー部12の長手方向の略中央部分(設計上の真の中央点に限らずその周辺近傍)が回転軸18となる場合に、回転軸18と略一致する位置の一箇所にトーションバーを接続し、これを支持する態様の他、当該略中央部分と把握される範囲内で回転軸18の位置を挟んで軸対称に2箇所以上の位置でトーションバーを接続する構造も可能である。
【0039】
トーションバー支持部22は、固定部30と同程度の厚みを有し、トーションバー20の一端を固定支持する部材である。トーションバー20とトーションバー支持部22との組み合わせがミラー部12のz方向並進運動を抑制する垂直並進運動抑制部32(「垂直移動抑制構造」に相当)として機能する。図2に示したとおり、この垂直並進運動抑制部32は、平面視で見た場合、ミラー部12とミアンダ状の連結部16との間に配置される。
【0040】
MEMSスキャナデバイス10は、ミラー部12を中心にしてその両側に、トーションバー20、トーションバー支持部22、連結部16、圧電アクチュエータ部14の各要素が線対称の構造で配置されている。かかる対称構造によって、中央のミラー部12に対して効率良く回転トルクを作用させることができる。
【0041】
詳細は後述するが、ミラー部12は、一対の圧電アクチュエータ部14を駆動することによって、y軸方向と平行な回転軸18の周りに回転運動が誘起され、反射面12Bが傾く。また、ミラー部12は、トーションバー20とトーションバー支持部22とによって、z方向(垂直方向)への並進運動が抑制される。
【0042】
このような構成からなるMEMSスキャナデバイス10は、例えば、シリコン基板から半導体製造技術を利用して加工することにより、固定部30、ミラー部12、圧電アクチュエータ部14、連結部16、トーションバー20、トーションバー支持部22等の要素が一体的に構成された構造物として作成することができる。
【0043】
なお、固定支持部材として機能する固定部30及びトーションバー支持部22の厚さ(z方向の厚さ)に比べて、圧電アクチュエータ部14、ミアンダ状の連結部16及びトーションバー20の厚さは、薄く形成されている。これにより、圧電アクチュエータ部14、ミアンダ状の連結部16、トーションバー20が変形(曲げ変形や捻れ変形)し易い構造となっている。
【0044】
図3は、圧電ユニモルフカンチレバー構造からなる圧電アクチュエータ部14の断面構造を示す模式図である。なお、本発明の実施に際して圧電アクチュエータとして、ユニモルフカンチレバー以外の構造を用いても良い。例えば、電極を挟んで圧電体を2層積層したバイモルフカンチレバーを用いても良い。
【0045】
図3に示すように、圧電アクチュエータ部14は、振動板42上に下部電極43、圧電体46、上部電極48が積層形成された構造を有する。このような積層構造体は、例えば、シリコン(Si)基板上に、下部電極43、圧電体46、上部電極48の各層を順次に成膜することによって得られる。図3における右端が固定部30(図1、図2参照)に支持された固定端である。
【0046】
図3に示す構成において、電極(43,48)間に駆動電圧が印加されることで圧電体46が変形し、この変形に伴い、振動板42が撓んで、レバー部が上下に動く。図3の破線はレバー部が上方に変位した様子を表している。
【0047】
<駆動電圧の供給方法について>
第1実施形態は、一対の圧電アクチュエータ部14に対して、同時に同じ駆動電圧を印加することよって、ミラー部12の両側の圧電アクチュエータ部14を同方向に変位させる。このため、一対の圧電アクチュエータ部14に駆動用の電力を供給する電力供給源として、共通の(同じ)駆動回路及び制御回路を用いることができる。圧電アクチュエータ部14に供給する駆動波形として、共振を励起する周波数の交流信号やパルス波形信号を用いることができる。
【0048】
<MEMSスキャナデバイス10の動作について>
第1実施形態に係るMEMSスキャナデバイス10は次のように動作する。
【0049】
一対の圧電アクチュエータ部14に、不図示の駆動制御回路から同時に同じ駆動電圧を印加すると、圧電アクチュエータ部14が変位し、これに接続されているミアンダ状の連結部16が曲がり変形する。そして、連結部16と接続されているミラー部12の端部12Aが上下方向(Z方向)に変位する。この動きによって、ミラー部12に回転トルクを与え、ミラー部12を回転軸18周りに回転運動させる。
【0050】
例えば、正弦波の駆動電圧を圧電アクチュエータ部14に印加することにより、圧電アクチュエータ部14を上下に振動させ、ミラー部12に回転運動を誘起する。共振周波数付近の周波数の駆動電圧を印加して共振駆動させることにより、ミラー部12は大きな傾き角で振動する。ミアンダ状の連結部16は、曲がり変形しやすいため、共振駆動において大きな変位を得るのに効果的である(図4参照)。なお、圧電アクチュエータ部14に印加する駆動電圧の周波数は、構造体の機械的な共振周波数と厳密に一致させることは必ずしも要求されない。共振が励起される範囲で駆動電圧の周波数の差異が許容される。
【0051】
一方、ミラー部12の長手方向の略中心部(回転軸18付近)を保持するトーションバー20は、ミラー部12の回転運動に対しては容易にねじれるが、ミラー部12が垂直方向(Z方向)に並進移動しようとすると、張力によって強い反発力を示し、ミラー部12の並進運動を阻害(抑制)する役割を果たす。すなわち、トーションバー20及びトーションバー支持部22からなる垂直並進運動抑制部32は、ミラー部12の回転軸18を一定の位置に維持しようとする作用を有し、これによりミラー部12の垂直並進運動(Z方向の並進移動)が抑制される(図5参照)。
【0052】
図4は回転共振モードによる駆動時の様子を示す斜視図、図5は並進モードの動きを示す斜視図である。なお、図4及び図5では固定部30の記載を省略した。図4に示したように、回転共振駆動によってミラー部12は大きな回転角で変位しうる。一方、並進モードについては、トーションバー20及びトーションバー支持部22の作用によってミラー部12のZ方向への運動が抑制される。
【0053】
上述のように、圧電アクチュエータ部14の駆動に応じて、中央のミラー部12は、Y軸方向に平行な回転軸18として揺動される。ミラー部12に入射した光(例えば、図示せぬレーザ光源から発せられたレーザ光)はミラー部12の傾き(角度)に応じて反射され、反射光の進行方向(反射光の照射位置)が変わる。本実施形態に係るMEMSスキャナデバイス10によれば、Z方向へのミラー部12の並進移動を防止しつつ、大きな偏向角で光走査することができる。
【0054】
<<圧電材料について>>
本実施形態に好適な圧電体としては、下記式で表される1種又は2種以上のペロブスカイト型酸化物(P)を含むものが挙げられる。
【0055】
一般式ABO3・・・(P)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
B:Bサイトの元素であり、Ti,Zr,V,Nb,Ta,Sb,Cr,Mo,W,Mn,Sc,Co,Cu,In,Sn,Ga,Zn,Cd,Fe,及びNiからなる群より選ばれた少なくとも1種の元素。
O:酸素元素。
Aサイト元素とBサイト元素と酸素元素のモル比は1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
上記一般式で表されるペロブスカイト型酸化物としては、チタン酸鉛、チタン酸ジルコン酸鉛(PZT)、ジルコニウム酸鉛、チタン酸鉛ランタン、ジルコン酸チタン酸鉛ランタン、マグネシウムニオブ酸ジルコニウムチタン酸鉛、ニッケルニオブ酸ジルコニウムチタン酸鉛、亜鉛ニオブ酸ジルコニウムチタン酸鉛等の鉛含有化合物、及びこれらの混晶系;チタン酸バリウム、チタン酸ストロンチウムバリウム、チタン酸ビスマスナトリウム、チタン酸ビスマスカリウム、ニオブ酸ナトリウム、ニオブ酸カリウム、ニオブ酸リチウム、ビスマスフェライト等の非鉛含有化合物、及びこれらの混晶系が挙げられる。
【0056】
また、本実施形態の圧電体膜は、下記式で表される1種又は2種以上のペロブスカイト型酸化物(PX)を含むことが好ましい。
【0057】
Aa(Zrx,Tiy,Mb−x−y)bOc・・・(PX)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
Mが、V、Nb、Ta、及びSbからなる群より選ばれた少なくとも1種の元素である。
0<x<b、0<y<b、0≦b−x−y。
a:b:c=1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
上述の一般式(P)及び(PX)で表されるペロブスカイト型酸化物からなる圧電体膜は、高い圧電歪定数(d31定数)を有するため、かかる圧電体膜を備えた圧電アクチュエータは、変位特性の優れたものとなる。なお、一般式(PX)で表されるペロブスカイト型酸化物の方が一般式(P)で表されるものよりも圧電定数が高くなる。
【0058】
また、一般式(P)及び(PX)で表されるペロブスカイト型酸化物からなる圧電体膜を備えた圧電アクチュエータは、駆動電圧範囲において、リニアリティの優れた電圧―変位特性を有している。これらの圧電材料は、本発明を実施する上で良好な圧電特性を示すものである。
【0059】
本実施形態における圧電体46の一具体例として、例えば、Nbを12%ドープしたPZT薄膜を用いることができる。スパッタリング法によってNbを12%ドープしたPZTを成膜することにより、圧電定数d31=250pm/Vという高い圧電特性を持つ薄膜を安定的に作製できる。
【0060】
なお、バルクの圧電体を基板に接合してもよいが、加工の難易度を考えると、気相成長法やゾルゲル法などにより基板上に圧電薄膜を直接成膜する構成が好ましい。特に、本実施形態の圧電体46としては、1μm以上10μm以下の厚さの薄膜であることが好ましい。後述する実施例では、圧電体46として、スパッタリング法によって成膜された4μm厚のPZT薄膜を使用しているが、これに限定されるものではない。
【0061】
<実施例1;具体的な製造方法の一例>
実施例1として以下の手順によりMEMSスキャナデバイス10を作製した。
【0062】
(工程1)ハンドル層350μm、ボックス層1μm、デバイス層10μmのSOI(Silicon On Insulator)基板上に、スパッタ法で基板温度350℃にて、Ti層を30nm、Ir電極層を150nm形成した。これらTi層及びIr電極層が図3の下部電極43に相当する。
【0063】
(工程2)上記得られた基板上に、高周波(RF;radio frequency)スパッタ装置を用いてPZT層を4μm成膜した。成膜ガスは97.5%Arと2.5%O2の混合ガスを用い、ターゲット材料としてはPb1.3((Zr0.52 Ti0.48)0.88 Nb0.12)O3の組成のものを用いた。成膜圧力は2.2mTorr、成膜温度は450℃とした。
【0064】
(工程3)上記で得られた基板上に、リフトオフ法によって上部電極としてのPt/Ti層をパターン形成し、ICP(inductively coupledplasma;誘導結合プラズマ)ドラインエッチングによってPZT薄膜をパターンエッチした。
【0065】
(工程4)その後、シリコンのドライエッチプロセスによって加工を行い、図1〜図3で説明したMEMSスキャナデバイス10を作成した。
【0066】
固定部30及びトーションバー支持部22は、ハンドル層とデバイス層の両方を利用した構造となっており、厚みが約370μmである。
【0067】
トーションバー支持部22はトーションバー20の一端を固定する役割を担っている。また、固定部30は圧電カンチレバーの一端(符号14B)及びトーションバー支持部22の一端(符号22B)を固定する役割を担っている。圧電アクチュエータ部14は、Siデバイス層(10μm)/下部電極/PZT薄膜/上部電極の積層構造となっており、圧電薄膜ユニモルフアクチュエータとして機能する。
【0068】
なお、本発明の実施に際しては、上記の実施例1に限定されず、基板の材料、電極材料、圧電材料、膜厚、成膜条件などは、目的に応じて適宜選択することができる。
【0069】
<実施例1に係るMEMSスキャナデバイスの評価>
上記の手順で作製された実施例1に係るMEMSスキャナデバイス10について、圧電アクチュエータ部14に電位振幅Vp-p=0.5Vの正弦波(サイン波)による駆動電圧を印加し、ミラーの回転軸回りの回転共振運動を誘起させてミラー部の機械振れ角をレーザーのスキャン角度で測定したところ、共振周波数fx=198Hz、機械振れ角=±22°であった(図11参照)。
【0070】
その一方、ミラー部が垂直方向(z方向)に並進運動するモードの共振周波数をfyとし、レーザードップラー測定によって計測したところ、fy=2100Hzであり、fxに比べて10倍以上高かった。
【0071】
この実施例1によれば、並進モードの共振周波数fyの値が十分高く、かつ駆動周波数である回転モードの共振周波数fxと十分離れていることから、環境振動からも、また、駆動振動からも、ミラー部の垂直方向振動が励起されにくく、安定して回転運動のみをすることが分かる。
【0072】
なお、環境振動の周波数については、例えば自動車用途の場合、ある振動モードが環境振動からの励起を受けないためには、当該振動の共振周波数が200Hz以上であることが求められる。自動車用途に限らず、一般的に、機器の持ち歩きや手動操作など、外乱による振動は低い周波数であることから、200Hz以上という基準を採用することにより、広範囲の用途に適用できる。すなわち、並進モードの共振周波数fyが200Hzを超える値であれば、環境振動(外乱)による並進運動の発生を防止することができる。
【0073】
また、駆動振動からの影響については、駆動振動の周波数と、当該並進モードの振動共振周波数との差が大きければ、駆動振動によって並進モードの共振が励起されにくくなる。
【0074】
駆動振動の周波数は、回転モードの共振周波数fxと同等かこれに近い周波数であることから、実質的には、並進モードの共振周波数fyが駆動振動の共振周波数(回転モードの共振周波数fx)の1.1倍以上であれば、駆動振動による並進モードの励起を十分に無視することができる。
【0075】
すなわち、回転モードの共振周波数fxと並進モードの共振周波数fyの比fy/fxが1.1以上となることが好ましい。駆動振動による並進モードの励起を抑えるためには、fyとfxとの差が大きいほど好ましいため、両者の比fy/fxが2以上となる条件を満たすことがより好ましい。
【0076】
実施例1の場合、fy/fxが10以上となるため、駆動振動による並進モードの励起は無視できる程度に極めて小さいものである。
【0077】
〔第2実施形態〕
図6及び図7は第2実施形態に係るMEMSスキャナデバイスの要部を示す斜視図である。図6は回転モードによる動きを説明する斜視図、図7は並進モードによる動きを説明する斜視図である。図6及び図7において、図1〜図5で説明した構成と同一または類似する部材には同一の符号を付し、その説明は省略する。また、図6及び図7では固定部30の記載を省略した。
【0078】
第2実施形態のMEMSスキャナデバイス60は、第1実施形態のMEMSスキャナデバイス10におけるトーションバー支持部22に代えて、薄板構造のトーションバー支持部62が採用されている点で第1実施形態と相違する。その他の構成は、第1実施形態と同様の構造であり、製造方法についても、実施例1と同様のプロセスで作製できる。
【0079】
トーションバー支持部62の基端62Bは、図示せぬ固定部30に固定支持される。トーションバー20とトーションバー支持部62の組み合わせが垂直並進運動抑制部32を構成する。トーションバー支持部62の厚みや形状を適宜設計することにより、所望の剛性、共振周波数に調整することができる。また、当該トーションバー支持部をSi薄板/下部電極/圧電膜/上部電極と積層されたユニモルフ構造にすることにより、ミラーの中心軸に直接変位を与え、アクティブに垂直変位を制御することもできる。
【0080】
<実施例2>
実施例2として、実施例1と同様のプロセスにより第2実施形態のMEMSスキャナデバイス60を作製した。この実施例2に係るMEMSスキャナデバイス60の圧電アクチュエータ部14に、電位振幅Vp-p=0.5Vの正弦波による駆動電圧を印加し、ミラーの回転軸回りの回転共振運動を誘起させて(図6参照)、ミラー部12の機械振れ角をレーザーのスキャン角度で測定したところ、共振周波数fx=180Hz、機械振れ角=±24°であった(図11参照)。
【0081】
一方、ミラー部12が垂直方向に並進運動するモード(図7参照)の共振周波数をfyとし、レーザードップラー測定によって計測したところ、fy=500 Hzであり、fxに比べて2.8倍高かった。
【0082】
実施例2に係るMEMSスキャナデバイス60の並進モードの共振周波数fyは、200Hzよりも高いため、環境振動による影響を受けにくいものである。また、実施例2に係るMEMSスキャナデバイス60の並進モードの共振周波数fyと、回転モードの共振周波数fxの比fy/fxは2倍を超えており、駆動振動による並進モードの励起の影響も抑制される。
【0083】
さらに、実施例2に係るMEMSスキャナデバイス60は、トーションバー支持部62が薄板で構成されているため、トーションバー20にかかる応力が実施例1に比べて低く、駆動によるトーションバーの破壊を防ぐことができる。
【0084】
<比較例1>
実施例1と同様の方法でSOI基板を用い、図8のようなMEMSスキャナデバイス310を作成した。この比較例1に係るMEMSスキャナデバイス310は、図14で説明したトーションバー構造に該当するものである。図8のMEMSスキャナデバイス310は、ミラー部312を挟んで両側に、ミラー部312の回転中心に接続されるトーションバー314が設けられ、各トーションバー314に対して2つの圧電アクチュエータ部316、318が接続されている。
【0085】
圧電アクチュエータ部316、318は、それぞれ圧電ユニモルフカンチレバー(片持ち梁)構造のアクチュエータであり、圧電アクチュエータ部316、318の端部316B、318Bは、図示せぬ固定支持部材(固定部)に固定されている。
【0086】
各トーションバー314を挟んで両側に連結されている2つの圧電アクチュエータ部316、318を互いに逆方向に駆動してトーションバー314をねじることにより、ミラー部312の回転運動を引き起こす。
【0087】
図9は比較例1の構成における回転モードの駆動時の様子を示す斜視図であり、図10は比較例1の構成における並進モードの動きの説明図である。
【0088】
比較例1の構造において、圧電アクチュエータ部316、318に電位振幅Vp-p=0.5Vの正弦波による駆動電圧を印加し、ミラーの回転軸回りの回転共振運動を誘起させてミラー部の機械振れ角をレーザーのスキャン角度で測定したところ、共振周波数fx=200 Hz、機械振れ角=±2.5°であった。
【0089】
この方式では、振れ角が小さく、十分なスキャン角度が得られないことが分かる。また、この方式では高い変位角度を得ようとするとトーションバー314を細く、及び/又は長くする必要があり、ハンドリングによって容易に破壊してしまうという問題もある。
【0090】
また、比較例1の構成について、ミラー部が垂直方向に並進運動するモード(図10参照)の共振周波数をfyとし、レーザードップラー測定によって計測したところ、fy=98Hzであった。比較例1は、環境振動の影響によって並進モードの励起が起こりやすく、並進モードの振動振幅も大きいものである。
【0091】
<比較例2>
実施例1と同様の方法でSOI基板を用い、図16のようなMEMSスキャナデバイス410を作成した。この比較例2に係るMEMSスキャナデバイス410は、「曲げヒンジ構造」に該当するものであり、第1実施形態及び第2実施形態と比較して、垂直並進運動抑制部32たるトーションバー20とトーションバー支持部22(又は62)の要素を取り除いた構造である。
【0092】
比較例2に係るMEMSスキャナデバイス410の圧電アクチュエータ(圧電カンチレバー414)に電位振幅Vp-p=0.5Vの正弦波による駆動電圧を印加し、ミラーの回転軸周りの回転共振運動(図18参照)を誘起させてミラー部の機械振れ角をレーザーのスキャン角度で測定したところ、共振周波数fx=190Hz、機械振れ角=±25°であった(図11参照)。一方、ミラー部が垂直方向に並進運動するモード(図19参照)の共振周波数をfyとし、レーザードップラー測定によって計測したところ、fy=200 Hzであり、fxに対して1.05倍と非常に近い値であることが分かった。
【0093】
比較例2は、スキャン角度としては十分な大きさを得ることができるものの、fyの値が200Hzと比較的低いことから、回転運動中に環境振動の影響でミラー部が大きく垂直方向に動いてしまう可能性がある。また、fyが、駆動周波数であるfxと非常に近いことから、駆動振動によってもミラー部の垂直方向振動が励起され易いという問題がある。実用上においては、ミラー部が垂直方向に変位すると、光路長の変化や焦点位置の変化を生み出してしまうため、垂直並進移動が発生しやすい光偏光器(ミラーデバイス)は実用に耐えない。
【0094】
<測定結果のまとめ>
実施例1、2と比較例1、2の評価(測定)結果を対比してまとめた表を図11に示した。実施例1、2で説明したような構成とすることで、大きい変位のミラー傾き角を得ることができ、環境振動や駆動振動からのミラー部の垂直並進運動の励振も大幅に抑えることができる。
【0095】
〔第3実施形態〕
図12は、第3実施形態に係るMEMSスキャナデバイス70の構成を示す平面図である。図12において、図1〜図5で説明した構成と同一または類似する部材には同一の符号を付し、その説明は省略する。第3実施形態は、ミアンダ状圧電カンチレバー構造による圧電アクチュエータ部74と垂直並進運動抑制部32とを組み合わせた構造となっている。
【0096】
図12における圧電アクチュエータ部74のうち、斜線で示した部分が振動板/下部電極/圧電体/上部電極の積層構造を持つ圧電カンチレバー要素77である。
【0097】
圧電アクチュエータ部74は、複数本の圧電カンチレバー要素77が平行に並べられ、ミアンダ状に折り返すように隣り合う圧電カンチレバー要素77の端部同士を接続した構成となっている。本例で5本の圧電カンチレバー要素77を接続した構成を例示しているが、圧電カンチレバー要素77の本数は2本以上、適宜の本数とすることができる。
【0098】
圧電アクチュエータ部74の一端74Aは、連結部76を介してミラー部12の長手方向の端部12Aに接続され、他端74Bは固定部30に固定支持されている。
【0099】
このような構造において、圧電アクチュエータ部74における隣り合う圧電カンチレバー要素77を交互に逆方向の曲げを誘起するように駆動することによって、各圧電カンチレバー要素77の変位が累積され、変位量が拡大される。この構造は、共振を用いなくてもミラー部12を大きく傾けることができる。
【0100】
また、トーションバー20とトーションバー支持部22の構成によって回転軸18付近が支持されているため、ミラー部12の並進運動が抑制される。
【0101】
<第4の実施形態>
図13は、第4実施形態に係るMEMSスキャナデバイス80の構成を示す平面図である。図13において、図1〜5、図12で説明した構成と同一又は類似する部材には同一の符号を付し、その説明は省略する。
【0102】
第4実施形態は、ミアンダ状圧電カンチレバー構造と曲げヒンジ構造、並びに垂直並進運動抑制部とを組み合わせた構造となっている。
【0103】
図12で説明した連結部76の構成に代えて、図1で説明したミアンダ状の連結部16を採用することができる。図13に示す第4実施形態によれば、圧電アクチュエータ部74における隣り合う圧電カンチレバー要素77について、互いに逆方向に曲げ駆動させる。これにより、共振を用いなくても圧電アクチュエータ部74の変位を拡大し、ミラー部の端を上下(ミラーの厚み方向)に振動させ、回転を誘起させることができる。
【0104】
なお、第3及び第4実施形態では、圧電アクチュエータ部74として、蛇行状の折り返し構造を持つ圧電カンチレバーを採用したが、本発明の実施に際して、レバー部の折り返し構造の採否や、折り返し回数(折り畳み数)については、特に限定されない。カンチレバーの折り畳み数を増やすほど、変位量を増大させることが可能である。
【0105】
第3及び第4実施形態において、共振振駆動によるミラー部の回転運動の誘起も可能である。カンチレバーの折り畳み数やレバー部の幅等は全体の共振周波数に影響する。折り畳み数を増やすほど、共振周波数は低下する傾向にある。また、レバー部の幅を細くするほど、共振周波数は低下する傾向にある。折り畳み数やレバー部の幅などを設計することによって、所望の共振周波数を実現できる。
【0106】
<ミアンダ状圧電カンチレバー構造の駆動電圧の供給方法について>
隣り合う圧電カンチレバー要素77を互いに逆方向に曲げ駆動させる手段として、隣り合う圧電カンチレバー要素77に対して互いに逆極性の駆動電圧を印加する構成とすることができる。
【0107】
或いはまた、隣り合う圧電カンチレバー要素77の圧電体の分極方向を異ならせる(逆方向に分極させる)ことにより、同一極性の駆動電圧の印加によって逆方向に曲げ駆動を実現することができる。
【0108】
圧電カンチレバー要素77に供給する駆動波形としては、共振を励起しないDC電圧信号を用いる態様、共振を励起しない周波数の交流信号やパルス波形信号を用いる態様、共振を励起する周波数の交流信号やパルス波形信号を用いる態様を採用し得る。
【0109】
<第1〜第4実施形態の作用効果>
(1)圧電カンチレバーの変位方向が常にミラーの回転方向にほぼ一致するため、カンチレバーの力がほぼすべてミラーの回転に用いられる。力の利用効率がよく、従来のトーションバー構造と比較して大幅に回転角が大きくなる。
【0110】
(2)ミラーの回転軸付近を支持するトーションバーを設けたことにより、ミラーがz方向(垂直方向)に大きく変位する並進モードの影響をほぼ無くすことができる。これによって、高いスキャン角度の実現と、外乱に伴う光路長変化等の抑制を両立できる。
【0111】
(3)垂直並進運動抑制部32を構成するトーションバー部分にピエゾ抵抗効果のある薄膜を配置することにより、トーションバー20の応力を直接検知することができる。この応力検知機能により、駆動中のミラーの角度を正確に測定することができる。
【0112】
(4)ねじりヒンジ剛性を挙げることによって、高い共振周波数で駆動するMEMSスキャナを設計することができる。
【0113】
(5)固定部、圧電アクチュエータ部、ミラー部並びにこれらの接続部(連結部)等をシリコン加工により一体的に形成することができる。
【0114】
(6)従来のポリゴンミラーやガルバノミラーと比べて小型化が可能であり、耐久性も高い。
【0115】
(7)実施例1、2で説明したように、基板上にPZT薄膜を直接成膜し、これをドライエッチング加工することでMEMSスキャナデバイスを形成することができる。このように、圧電体を薄膜化することでより細かいパターニングを容易に行うことができるため、歩留まりが大幅に向上するとともにデバイスのさらなる小型化に対応することができる。
【0116】
ただし、本発明の実施に際しては、薄膜圧電体に限ったものではく、バルク圧電体を振動板に貼りつけてユニモルフアクチュエータを形成したり、2つの極性の異なる圧電体を貼りあわせてバイモルフアクチュエータとしても良い。
【0117】
<デバイスサイズの一例>
本発明の実施形態として作製されるMEMSスキャナデバイス10、60、70、80の大きさや、具体的な形状については、様々な形態があり得る。一例として、図1及び図2におけるミラー部12、圧電アクチュエータ部14、及び固定部30を含んだデバイスの大きさは平面視で約3mm×2mm程度である。さらなる小型化も可能であり、1mm×1mm程度のデバイスの作製も可能である。
【0118】
<変形例>
第1実施形態から第4実施形態は、垂直移動抑制構造として、ミラー部12の両側にそれぞれ一本のトーションバー20を接続し、このトーションバー20によってミラー回転中心を支持しているが、ミラー回転軸を安定に支持する方法はこれに限ったものではなく、例えば回転軸に軸対称に配置された複数のバーでミラーを支持する構成を採用してもよい。
【0119】
<応用例>
本発明は、レーザー光等の光を反射して光の進行方向を変える光学装置として様々な用途に利用できる。例えば、光偏向器、光走査装置、レーザープリンタ、バーコード読取機、表示装置、各種の光学センサ(測距センサ、形状測定センサ)、光通信装置、レーザープロジェクタ、OCT画像診断装置などに広く適用することができる。
【0120】
なお、本発明は以上説明した実施形態に限定されるものではなく、本発明の技術的思想内で当該分野の通常の知識を有するものにより、多くの変形が可能である。
【0121】
<開示する発明の態様について>
上記に詳述した発明の実施形態についての記載から把握されるとおり、本明細書は少なくとも以下に示す発明を含む多様な技術思想の開示を含んでいる。
【0122】
(発明1):光を反射する反射面を有するミラー部と、前記ミラー部を挟んで両側に配置される一対の圧電アクチュエータ部と、前記ミラー部の回転軸から前記反射面に沿って前記回転軸に垂直な方向に離れた前記ミラー部の端部に前記圧電アクチュエータ部の一端を接続させる連結部と、前記圧電アクチュエータ部の他端を支持する固定部と、前記固定部に一端が接続され、他端が前記ミラー部に接続されており、前記ミラー部の回転軸が前記反射面の垂直方向に並進運動することを抑制する垂直移動抑制構造と、を備えるミラー駆動装置。
【0123】
この発明によれば、ミラー部を両側から挟むように一対の圧電アクチュエータ部が配置される。圧電アクチュエータ部の一端は連結部を介してミラー部の端付近に接続され、他端は固定部に支持される。圧電アクチュエータ部を駆動してアクチュエータを変位させることによって、ミラー部の端部が変位し、これによりミラー部の回転軸の回りに回転トルクが与えられ、ミラー部を回転駆動させることができる。
【0124】
このような構造は、圧電アクチュエータ部の変位方向がミラー部の回転方向に概ね一致するため、圧電アクチュエータ部の力を効率よく回転運動に利用することができ、大きな回転角(ミラーの傾き角)を得ることができる。また、本発明におけるミラー部は垂直移動抑制構造を介して固定部に接続されているため、回転軸を一定の位置に保つことができ、ミラー部の垂直方向への並進運動が抑制される。
【0125】
(発明2):発明1に記載のミラー駆動装置において、前記垂直移動抑制構造は、前記ミラー部上の回転軸と一致する位置、若しくは前記ミラー部上の回転軸に対して軸対称である複数の位置と、前記固定部とを接続する構造とすることが好ましい。
【0126】
ミラー部の垂直方向の並進運動を効果的に抑制するには、ミラー部の回転軸の付近を支持する構成が好ましい。回転軸の位置と概ね一致する位置でミラー部と垂直移動抑制構造とを接続する構成の他、回転軸に対して軸対称となる複数の位置でミラー部と垂直移動抑制構造とを接続する構成も採用し得る。
【0127】
(発明3):発明1又は2に記載のミラー駆動装置において、前記垂直移動抑制構造は、前記ミラー部上の回転軸と一致する位置に接続され、当該ミラー部から外側に向かって前記回転軸の軸方向に延設されるトーションバーと、前記トーションバーに接続されるとともに前記固定部に接続され、前記トーションバーを支持するトーションバー支持部と、を有する構成とすることができる。
【0128】
垂直移動抑制構造の具体的態様として、回転軸の付近に接続されるトーションバーと、トーションバーを固定部に接続するトーションバー支持部とを含んだ構造を採用することができる。トーションバーは、ミラー部の垂直方向の並進運動を張力によって抑制する。
【0129】
(発明4):発明3に記載のミラー駆動装置において、前記トーションバー支持部は、前記固定部と同等の厚みを有している構成とすることができる。
【0130】
かかる態様によれば、並進運動の共振周波数を高い値にすることができる。これにより、環境振動や駆動振動からのミラー部の垂直運動の励振を大幅に抑えることができる。
【0131】
(発明5):発明3に記載のミラー駆動装置において、前記トーションバー支持部は、前記固定部の厚みよりも薄い薄板構造とすることができる。
【0132】
トーションバー支持部の厚みを適宜設計することで、トーションバーにかかる応力を調整することができる。トーションバー支持部の厚みを薄くするほど、トーションバーにかかる応力を低下させることができ、駆動によるトーションバーの破壊を防止することができる。また、トーションバー支持部の厚みを調整することで並進モードも共振周波数を調整することができる。
【0133】
(発明6):発明1から5のいずれか1項に記載のミラー駆動装置において、前記連結部は、前記反射面に沿って前記回転軸に垂直な方向を長手方向とする薄板部材が1本以上ミアンダ状に折り返すように並べられた構造を有するものとすることができる。
【0134】
このような構成によれば、連結部が変位しやすくなり、回転角度を大きくすることができる。
【0135】
(発明7):発明1から6のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部は、1つ又は複数の圧電カンチレバーによって構成することができる。
【0136】
圧電アクチュエータ部は、1つの圧電カンチレバーで構成されていてもよいし、複数の圧電カンチレバーをミアンダ状につなぎ合わせた構成とすることができる。
【0137】
(発明8):発明1から7のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部は、振動板、下部電極、圧電体、上部電極の順に積層された圧電ユニモルフカンチレバーで構成することができる。
【0138】
圧電アクチュエータ部としては、ユニモルフ構造に限らず、バイモルフ構造も可能であるが、ユニモルフ構造が最も簡単な構成である。
【0139】
(発明9):発明1から8のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部を変位させることによって前記ミラー部と前記連結部との接続部分を振動させ、前記ミラー部に前記回転軸周りの回転運動を誘起させることができる。
【0140】
ミラー部の端部を振動させることで、慣性力によってミラー部に回転トルクが与えられ、回転運動が誘起される。
【0141】
(発明10):発明1から9のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部は、複数の圧電カンチレバーがミアンダ状に折り返すように並べられた構造を有しており、隣り合う圧電カンチレバー同士が互いに逆方向の屈曲変位を行うように駆動される構成とすることができる。
【0142】
かかる態様によれば、共振を利用しなくても大きな変位を得ることが可能である。
【0143】
(発明11):発明1から10のいずれか1項に記載のミラー駆動装置において、前記ミラー部が前記回転軸を中心に回転運動を行う共振モードの共振周波数fxの付近で前記ミラー部を共振駆動させる構成とすることができる。
【0144】
かかる態様によれば、回転共振を利用してミラー部を大きな回転角で振動させることができるとともに、垂直方向の並進運動を抑制することができる。
【0145】
(発明12):発明1から11のいずれか1項に記載のミラー駆動装置において、前記ミラー部が前記反射面の垂直方向に並進運動する共振モードの共振周波数fyが200Hzよりも高い値であることが好ましい。
【0146】
かかる態様によれば、環境振動による並進運動の誘発を抑制することができる。また、並進モードの共振周波数fyが高い値になるほど、並進モードの振動振幅は小さくなる。
【0147】
(発明13):発明1から12のいずれか1項に記載のミラー駆動装置において、前記ミラー部の前記並進運動の共振周波数fyと、前記ミラー部の前記回転軸を中心とする回転運動の共振周波数fxとの比fy/fxが1.1以上であることが好ましい。
【0148】
かかる態様によれば、駆動周波数の影響による並進運動の誘発を抑制することができる。
【0149】
(発明14):発明1から13のいずれか1項に記載のミラー駆動装置において、前記ミラー部の前記並進運動の共振周波数fyと、前記ミラー部の前記回転軸を中心とする回転運動の共振周波数fxとの比fy/fxが2.0以上であることが好ましい。
【0150】
fxに対してfyが2倍以上となる条件を満たすと、共振駆動による駆動周波数と並進モードの共振周波数との差が十分に大きくなるため、並進運動の誘発を実質的に十分無視することができるレベルに抑制することができる。
【0151】
(発明15):発明1から14のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部に用いられる圧電体は1〜10μm厚の薄膜であり、振動板となる基板上に直接成膜された薄膜とすることができる。
【0152】
薄膜圧電体を用いて圧電アクチュエータを構成することが好ましい。スパッタリング法に代表される気相成長法やゾルゲル法などの直接成膜法を用いることにより、所要の圧電性能を持つ圧電体薄膜を得ることができる。
【0153】
(発明16):発明15に記載のミラー駆動装置において、前記圧電体は、スパッタリング法で成膜された薄膜とすることができる。
【0154】
(発明17):発明1から16のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部に用いられる圧電体は、下記式(P)で表される1種又は2種以上のペロブスカイト型酸化物であることが好ましい。
【0155】
一般式ABO3・・・(P)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
B:Bサイトの元素であり、Ti,Zr,V,Nb,Ta,Sb,Cr,Mo,W,Mn,Sc,Co,Cu,In,Sn,Ga,Zn,Cd,Fe,及びNiからなる群より選ばれた少なくとも1種の元素。
O:酸素元素。
Aサイト元素とBサイト元素と酸素元素のモル比は1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
かかる圧電体は良好な圧電特性を有し、圧電アクチュエータ部として好ましいものである。
【0156】
(発明18):発明1から17のいずれか1項に記載のミラー駆動装置において、前記圧電アクチュエータ部に用いられる圧電体は、下記式(PX)で表される1種又は2種以上のペロブスカイト型酸化物であることが好ましい。
【0157】
Aa(Zrx,Tiy,Mb−x−y)bOc・・・(PX)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
Mが、V,Nb,Ta,及びSbからなる群より選ばれた少なくとも1種の元素である。
0<x<b、0<y<b、0≦b−x−y。
a:b:c=1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
かかる圧電体は良好な圧電特性を有し、圧電アクチュエータ部として好ましいものである。
【0158】
(発明19):発明1から18のいずれか1項に記載のミラー駆動装置におけるミラー駆動方法であって、前記一対の圧電アクチュエータ部に駆動電圧を印加し、前記圧電アクチュエータ部を屈曲変位させることにより、前記ミラー部と前記連結部との接続部分を振動させ、この振動により前記ミラー部に前記回転軸回りの回転トルクを与え、前記ミラー部を回転駆動させるミラー駆動方法。
【0159】
(発明20):発明10に記載のミラー駆動装置におけるミラー駆動方法であって、前記複数の圧電カンチレバーがミアンダ状に折り返すように並べられた構造を有する前記圧電アクチュエータ部において隣り合う圧電カンチレバー同士が互いに逆方向の屈曲変位を行うように、各圧電カンチレバーに駆動電圧を印加し、これら複数の圧電カンチレバーの変位を累積させて前記ミラー部を非共振で回転駆動させるミラー駆動方法。
【0160】
このミラー駆動方法は、ミアンダ状圧電カンチレバー構造を有する圧電アクチュエータ部を非共振で駆動する態様である。
【0161】
(発明21)発明1から18のいずれか1項に記載のミラー駆動装置の製造方法であって、SOI基板上に、前記圧電アクチュエータ部の下部電極を形成する工程と、前記下部電極が形成された前記SOI基板上に圧電体薄膜を成膜する工程と、前記圧電体薄膜に上部電極を形成する工程と、シリコンのドライエッチプロセスによって前記SOI基板を加工することにより、前記ミラー部、前記連結部、前記圧電アクチュエータ部、前記垂直移動抑制構造及び前記固定部の形状を形成する工程と、を含むことをミラー駆動装置の製造方法。
【符号の説明】
【0162】
10…MEMSスキャナデバイス、12…ミラー部、14…圧電アクチュエータ部、16…連結部、17…薄板部材、18…回転軸、20…トーションバー、22…トーションバー支持部、30…固定部、32…垂直並進運動抑制部、42…振動板、43…下部電極、6…圧電体、48…上部電極、60,70,80…MEMSスキャナデバイス、62…トーションバー支持部、74…圧電アクチュエータ部、76…連結部、77…圧電カンチレバー要素
【特許請求の範囲】
【請求項1】
光を反射する反射面を有するミラー部と、
前記ミラー部を挟んで両側に配置される一対の圧電アクチュエータ部と、
前記ミラー部の回転軸から前記反射面に沿って前記回転軸に垂直な方向に離れた前記ミラー部の端部に前記圧電アクチュエータ部の一端を接続させる連結部と、
前記圧電アクチュエータ部の他端を支持する固定部と、
前記固定部に一端が接続され、他端が前記ミラー部に接続されており、前記ミラー部の回転軸が前記反射面の垂直方向に並進運動することを抑制する垂直移動抑制構造と、
を備えることを特徴とするミラー駆動装置。
【請求項2】
前記垂直移動抑制構造は、前記ミラー部上の回転軸と一致する位置、若しくは前記ミラー部上の回転軸に対して軸対称である複数の位置と、前記固定部とを接続する構造であることを特徴とする請求項1に記載のミラー駆動装置。
【請求項3】
前記垂直移動抑制構造は、前記ミラー部上の回転軸と一致する位置に接続され、当該ミラー部から外側に向かって前記回転軸の軸方向に延設されるトーションバーと、
前記トーションバーに接続されるとともに前記固定部に接続され、前記トーションバーを支持するトーションバー支持部と、
を有することを特徴とする請求項1又は2に記載のミラー駆動装置。
【請求項4】
前記トーションバー支持部は、前記固定部と同等の厚みを有していることを特徴とする請求項3に記載のミラー駆動装置。
【請求項5】
前記トーションバー支持部は、前記固定部の厚みよりも薄い薄板構造であることを特徴とする請求項3に記載のミラー駆動装置。
【請求項6】
前記連結部は、前記反射面に沿って前記回転軸に垂直な方向を長手方向とする薄板部材が1本以上ミアンダ状に折り返すように並べられた構造を有することを特徴とする請求項1から5のいずれか1項に記載のミラー駆動装置。
【請求項7】
前記圧電アクチュエータ部は、1つ又は複数の圧電カンチレバーによって構成されることを特徴とする請求項1から6のいずれか1項に記載のミラー駆動装置。
【請求項8】
前記圧電アクチュエータ部は、振動板、下部電極、圧電体、上部電極の順に積層された圧電ユニモルフカンチレバーで構成されることを特徴とする請求項1から7のいずれか1項に記載のミラー駆動装置。
【請求項9】
前記圧電アクチュエータ部を変位させることによって前記ミラー部と前記連結部との接続部分を振動させ、前記ミラー部に前記回転軸周りの回転運動を誘起させることを特徴とする請求項1から8のいずれか1項に記載のミラー駆動装置。
【請求項10】
前記圧電アクチュエータ部は、複数の圧電カンチレバーがミアンダ状に折り返すように並べられた構造を有しており、隣り合う圧電カンチレバー同士が互いに逆方向の屈曲変位を行うように駆動されることを特徴とする請求項1から9のいずれか1項に記載のミラー駆動装置。
【請求項11】
前記ミラー部が前記回転軸を中心に回転運動を行う共振モードの共振周波数fxの付近で前記ミラー部を共振駆動させることを特徴とする請求項1から10のいずれか1項に記載のミラー駆動装置。
【請求項12】
前記ミラー部が前記反射面の垂直方向に並進運動する共振モードの共振周波数fyが200Hzよりも高い値であることを特徴とする請求項1から11のいずれか1項に記載のミラー駆動装置。
【請求項13】
前記ミラー部の前記並進運動の共振周波数fyと、前記ミラー部の前記回転軸を中心とする回転運動の共振周波数fxとの比fy/fxが1.1以上であることを特徴とする請求項1から12のいずれか1項に記載のミラー駆動装置。
【請求項14】
前記ミラー部の前記並進運動の共振周波数fyと、前記ミラー部の前記回転軸を中心とする回転運動の共振周波数fxとの比fy/fxが2.0以上であることを特徴とする請求項1から13のいずれか1項に記載のミラー駆動装置。
【請求項15】
前記圧電アクチュエータ部に用いられる圧電体は1〜10μm厚の薄膜であり、振動板となる基板上に直接成膜された薄膜であることを特徴とする請求項1から14のいずれか1項に記載のミラー駆動装置。
【請求項16】
前記圧電体は、スパッタリング法で成膜された薄膜であることを特徴とする請求項15に記載のミラー駆動装置。
【請求項17】
前記圧電アクチュエータ部に用いられる圧電体は、下記式(P)で表される1種又は2種以上のペロブスカイト型酸化物であることを特徴とする請求項1から16のいずれか1項に記載のミラー駆動装置。
一般式ABO3・・・(P)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
B:Bサイトの元素であり、Ti,Zr,V,Nb,Ta,Sb,Cr,Mo,W,Mn,Sc,Co,Cu,In,Sn,Ga,Zn,Cd,Fe,及びNiからなる群より選ばれた少なくとも1種の元素。
O:酸素元素。
Aサイト元素とBサイト元素と酸素元素のモル比は1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
【請求項18】
前記圧電アクチュエータ部に用いられる圧電体は、下記式(PX)で表される1種又は2種以上のペロブスカイト型酸化物であることを特徴とする請求項1から17のいずれか1項に記載のミラー駆動装置。
Aa(Zrx,Tiy,Mb−x−y)bOc・・・(PX)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
Mが、V,Nb,Ta,及びSbからなる群より選ばれた少なくとも1種の元素である。
0<x<b、0<y<b、0≦b−x−y。
a:b:c=1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
【請求項19】
請求項1から18のいずれか1項に記載のミラー駆動装置におけるミラー駆動方法であって、
前記一対の圧電アクチュエータ部に駆動電圧を印加し、前記圧電アクチュエータ部を屈曲変位させることにより、前記ミラー部と前記連結部との接続部分を振動させ、この振動により前記ミラー部に前記回転軸回りの回転トルクを与え、前記ミラー部を回転駆動させることを特徴とするミラー駆動方法。
【請求項20】
請求項10に記載のミラー駆動装置におけるミラー駆動方法であって、
前記複数の圧電カンチレバーがミアンダ状に折り返すように並べられた構造を有する前記圧電アクチュエータ部において隣り合う圧電カンチレバー同士が互いに逆方向の屈曲変位を行うように、各圧電カンチレバーに駆動電圧を印加し、
これら複数の圧電カンチレバーの変位を累積させて前記ミラー部を非共振で回転駆動させることを特徴とするミラー駆動方法。
【請求項21】
請求項1から18のいずれか1項に記載のミラー駆動装置の製造方法であって、
SOI基板上に、前記圧電アクチュエータ部の下部電極を形成する工程と、
前記下部電極が形成された前記SOI基板上に圧電体薄膜を成膜する工程と、
前記圧電体薄膜に上部電極を形成する工程と、
シリコンのドライエッチプロセスによって前記SOI基板を加工することにより、前記ミラー部、前記連結部、前記圧電アクチュエータ部、前記垂直移動抑制構造及び前記固定部の形状を形成する工程と、
を含むことを特徴とするミラー駆動装置の製造方法。
【請求項1】
光を反射する反射面を有するミラー部と、
前記ミラー部を挟んで両側に配置される一対の圧電アクチュエータ部と、
前記ミラー部の回転軸から前記反射面に沿って前記回転軸に垂直な方向に離れた前記ミラー部の端部に前記圧電アクチュエータ部の一端を接続させる連結部と、
前記圧電アクチュエータ部の他端を支持する固定部と、
前記固定部に一端が接続され、他端が前記ミラー部に接続されており、前記ミラー部の回転軸が前記反射面の垂直方向に並進運動することを抑制する垂直移動抑制構造と、
を備えることを特徴とするミラー駆動装置。
【請求項2】
前記垂直移動抑制構造は、前記ミラー部上の回転軸と一致する位置、若しくは前記ミラー部上の回転軸に対して軸対称である複数の位置と、前記固定部とを接続する構造であることを特徴とする請求項1に記載のミラー駆動装置。
【請求項3】
前記垂直移動抑制構造は、前記ミラー部上の回転軸と一致する位置に接続され、当該ミラー部から外側に向かって前記回転軸の軸方向に延設されるトーションバーと、
前記トーションバーに接続されるとともに前記固定部に接続され、前記トーションバーを支持するトーションバー支持部と、
を有することを特徴とする請求項1又は2に記載のミラー駆動装置。
【請求項4】
前記トーションバー支持部は、前記固定部と同等の厚みを有していることを特徴とする請求項3に記載のミラー駆動装置。
【請求項5】
前記トーションバー支持部は、前記固定部の厚みよりも薄い薄板構造であることを特徴とする請求項3に記載のミラー駆動装置。
【請求項6】
前記連結部は、前記反射面に沿って前記回転軸に垂直な方向を長手方向とする薄板部材が1本以上ミアンダ状に折り返すように並べられた構造を有することを特徴とする請求項1から5のいずれか1項に記載のミラー駆動装置。
【請求項7】
前記圧電アクチュエータ部は、1つ又は複数の圧電カンチレバーによって構成されることを特徴とする請求項1から6のいずれか1項に記載のミラー駆動装置。
【請求項8】
前記圧電アクチュエータ部は、振動板、下部電極、圧電体、上部電極の順に積層された圧電ユニモルフカンチレバーで構成されることを特徴とする請求項1から7のいずれか1項に記載のミラー駆動装置。
【請求項9】
前記圧電アクチュエータ部を変位させることによって前記ミラー部と前記連結部との接続部分を振動させ、前記ミラー部に前記回転軸周りの回転運動を誘起させることを特徴とする請求項1から8のいずれか1項に記載のミラー駆動装置。
【請求項10】
前記圧電アクチュエータ部は、複数の圧電カンチレバーがミアンダ状に折り返すように並べられた構造を有しており、隣り合う圧電カンチレバー同士が互いに逆方向の屈曲変位を行うように駆動されることを特徴とする請求項1から9のいずれか1項に記載のミラー駆動装置。
【請求項11】
前記ミラー部が前記回転軸を中心に回転運動を行う共振モードの共振周波数fxの付近で前記ミラー部を共振駆動させることを特徴とする請求項1から10のいずれか1項に記載のミラー駆動装置。
【請求項12】
前記ミラー部が前記反射面の垂直方向に並進運動する共振モードの共振周波数fyが200Hzよりも高い値であることを特徴とする請求項1から11のいずれか1項に記載のミラー駆動装置。
【請求項13】
前記ミラー部の前記並進運動の共振周波数fyと、前記ミラー部の前記回転軸を中心とする回転運動の共振周波数fxとの比fy/fxが1.1以上であることを特徴とする請求項1から12のいずれか1項に記載のミラー駆動装置。
【請求項14】
前記ミラー部の前記並進運動の共振周波数fyと、前記ミラー部の前記回転軸を中心とする回転運動の共振周波数fxとの比fy/fxが2.0以上であることを特徴とする請求項1から13のいずれか1項に記載のミラー駆動装置。
【請求項15】
前記圧電アクチュエータ部に用いられる圧電体は1〜10μm厚の薄膜であり、振動板となる基板上に直接成膜された薄膜であることを特徴とする請求項1から14のいずれか1項に記載のミラー駆動装置。
【請求項16】
前記圧電体は、スパッタリング法で成膜された薄膜であることを特徴とする請求項15に記載のミラー駆動装置。
【請求項17】
前記圧電アクチュエータ部に用いられる圧電体は、下記式(P)で表される1種又は2種以上のペロブスカイト型酸化物であることを特徴とする請求項1から16のいずれか1項に記載のミラー駆動装置。
一般式ABO3・・・(P)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
B:Bサイトの元素であり、Ti,Zr,V,Nb,Ta,Sb,Cr,Mo,W,Mn,Sc,Co,Cu,In,Sn,Ga,Zn,Cd,Fe,及びNiからなる群より選ばれた少なくとも1種の元素。
O:酸素元素。
Aサイト元素とBサイト元素と酸素元素のモル比は1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
【請求項18】
前記圧電アクチュエータ部に用いられる圧電体は、下記式(PX)で表される1種又は2種以上のペロブスカイト型酸化物であることを特徴とする請求項1から17のいずれか1項に記載のミラー駆動装置。
Aa(Zrx,Tiy,Mb−x−y)bOc・・・(PX)
(式中、A:Aサイトの元素であり、Pbを含む少なくとも1種の元素。
Mが、V,Nb,Ta,及びSbからなる群より選ばれた少なくとも1種の元素である。
0<x<b、0<y<b、0≦b−x−y。
a:b:c=1:1:3が標準であるが、これらのモル比はペロブスカイト構造を取り得る範囲内で基準モル比からずれてもよい。)
【請求項19】
請求項1から18のいずれか1項に記載のミラー駆動装置におけるミラー駆動方法であって、
前記一対の圧電アクチュエータ部に駆動電圧を印加し、前記圧電アクチュエータ部を屈曲変位させることにより、前記ミラー部と前記連結部との接続部分を振動させ、この振動により前記ミラー部に前記回転軸回りの回転トルクを与え、前記ミラー部を回転駆動させることを特徴とするミラー駆動方法。
【請求項20】
請求項10に記載のミラー駆動装置におけるミラー駆動方法であって、
前記複数の圧電カンチレバーがミアンダ状に折り返すように並べられた構造を有する前記圧電アクチュエータ部において隣り合う圧電カンチレバー同士が互いに逆方向の屈曲変位を行うように、各圧電カンチレバーに駆動電圧を印加し、
これら複数の圧電カンチレバーの変位を累積させて前記ミラー部を非共振で回転駆動させることを特徴とするミラー駆動方法。
【請求項21】
請求項1から18のいずれか1項に記載のミラー駆動装置の製造方法であって、
SOI基板上に、前記圧電アクチュエータ部の下部電極を形成する工程と、
前記下部電極が形成された前記SOI基板上に圧電体薄膜を成膜する工程と、
前記圧電体薄膜に上部電極を形成する工程と、
シリコンのドライエッチプロセスによって前記SOI基板を加工することにより、前記ミラー部、前記連結部、前記圧電アクチュエータ部、前記垂直移動抑制構造及び前記固定部の形状を形成する工程と、
を含むことを特徴とするミラー駆動装置の製造方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−57819(P2013−57819A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−196295(P2011−196295)
【出願日】平成23年9月8日(2011.9.8)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月8日(2011.9.8)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
[ Back to top ]