
ミリ波レーダによる道路交通監視装置
【課題】ミリ波レーダにより走行車両を計測し車線数、各車線幅、中央分離帯幅などを自動的に判断しながら車両交通量を監視する道路交通監視装置を提供する。
【解決手段】ミリ波レーダ2によりミリ波ビーム7を照射し反射波受信により複数の走行車両の検出を行う。照射角、反射までの時間、ドップラーシフトの関係から、ミリ波レーダ2からの距離、方向角度、速度等を算出し、車両の走行軌跡を求め、走行車両数と車線幅方向の関係をグラフ化してグループ分けを行い、グラフの山から車線数を抽出し、グラフの山と両脇の谷から車線幅を抽出する。走行軌跡の速度成分方向が正から負に切り替わる境界部分の中央分離帯の幅を求める。以上で得られた道路配置に基づき車両交通量の計測と監視を行う。
【解決手段】ミリ波レーダ2によりミリ波ビーム7を照射し反射波受信により複数の走行車両の検出を行う。照射角、反射までの時間、ドップラーシフトの関係から、ミリ波レーダ2からの距離、方向角度、速度等を算出し、車両の走行軌跡を求め、走行車両数と車線幅方向の関係をグラフ化してグループ分けを行い、グラフの山から車線数を抽出し、グラフの山と両脇の谷から車線幅を抽出する。走行軌跡の速度成分方向が正から負に切り替わる境界部分の中央分離帯の幅を求める。以上で得られた道路配置に基づき車両交通量の計測と監視を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ミリ波レーダにより車線数と各車線幅を自動的に判別して車両交通量を監視する道路交通監視装置に関する。
【背景技術】
【0002】
従来、道路を走行する車両の数が多くなるに伴い、走行中の車両を監視する各種の車両監視装置や監視方法が提案されている。
例えば、交差点に進入する車両につき、ビデオ画像から抽出した車両軌跡をもとに、右折、左折、直進車両を判別して、それぞれの交通量を測定するようにした車両感知装置が提案されている。(例えば、特許文献1参照。)
また、特定の車両発見領域を設けずに、所定周期で撮影された画像から車両位置を経時的に追跡して得る軌跡データを元に、道路を通行する車両を的確に検出して交通量を計測する道路交通流計測装置及び計測方法が提案されている。(例えば、特許文献2参照。)
また、全天候下で走行車両の追跡検出を確実に行い、出合頭の衝突や見通し不良の交差点での追突を防止するミリ波レーダによる走行車両検出方法が提案されている。(例えば、特許文献3参照。)
ところで、上記のように走行車両の検出を行っても、その結果を用いて交通流の監視まで行うためには、車両がどの車線を走行しているのかを知る必要がある。
【0003】
そのためには、レーダ等の走行車両検出装置を設置する際に、その設置箇所の道路配置の詳細を測定し、その測定によって得られた道路の車線数、車線幅、中央分離帯幅等の道路配置のデータを、パラメータとして予め走行車両検出装置に接続されるコンピュータに与える必要がある。
【0004】
従来、走行車両検出装置に連動するコンピュータは、上記のようにして与えられたパラメータと走行車両検出装置による計測結果とを照合することによって、車両が走行している車線を判別するようにしていた。
【特許文献1】特開2000−090389号公報(要約、図1)
【特許文献2】特開2002−358595号公報(要約、図1)
【特許文献3】特開2002−099986号公報(要約、図1、図3)
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1の技術は、車両の軌跡から車両の進む方向を判断して車両の進む方向ごとの交通量を測定するものであり、車線そのものを認識するものではない。
また、特許文献2の技術は、初めから特定の車両発見領域を設けないことを前提としており、そこには、車線そのものを認識しようという思想は含まれていない。
【0006】
いずれにしても、これらの装置または方法は、ビデオ画像から車両の軌跡を求めるものであり、このように可視光又は赤外線のような画像センサを用いるものは、濃霧、降雨、降雪のような悪天候による視界不良時、または夜間等の薄暗い状況においては、車両検出が正確に行なうことができないという問題がある。
【0007】
これに対して特許文献3の技術は、悪天候等にも影響を受けにくいミリ波レーダによって全天候下において走行車両の追跡検出を確実に行うものではあるものの、衝突等の事故の防止を主眼としたものであって、車線そのものを認識しようという思想は含まれていない。
【0008】
また、計測範囲となる道路の車線数、車線幅、中央分離帯幅、路肩幅などの道路配置情報を予めパラメータとして走行車両検出装置に与える場合、事前に詳細な地図情報(測量データ)がない場合は、道路配置情報を取得するために、すなわち、実際に道路配置を測定するために、一時的に道路を閉鎖するような交通規制を行なうなどの手間が生じてしまう。
【0009】
そして、上述したように、その測定した道路配置のデータを走行車両検出装置に接続されたコンピュータにパラメータとして与える必要がある。このように、多大な工数と費用がかかるという問題があった。
【0010】
また、雪や霧等によって視界不良となる悪天候のときや積雪時には道路上の白線が確認しにくくなる。更には、中央分離帯や路肩に道路面から除雪された雪山があったりすると、車線が狭くなる場合がある。また、道路工事等によっては、通常の車線とは異なる車線が一時的に設けられたりすることも良く行われる。いずれにしても、車両は、規定車線に正しく従って走行できなくなる。
【0011】
そのような、車両が規定車道通りに走行できないようなときには、車線幅等の現実のパラメータが、予め与えられているパラメータから変動しているため、走行車両の正確な計測ができない、すなわち正確な道路監視ができないという問題が生じる。
【0012】
本発明の課題は、上記従来の実情に鑑み、ミリ波レーダにより走行車両を計測し車線数、各車線幅、中央分離帯幅などを自動的に判断しながら車両交通量を監視する道路交通監視装置を提供することである。
【課題を解決するための手段】
【0013】
先ず、第1の発明のミリ波レーダによる道路交通監視装置は、ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、を有して構成される。
【0014】
次に、第2の発明のミリ波レーダによる道路交通監視装置は、ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、を有して構成される。
【0015】
更に、第3の発明のミリ波レーダによる道路交通監視装置は、ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、上記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、上記道路車線の数及び上記道路車線の幅に基づいて道路配置を決定する道路配置決定手段と、を有して構成される。
【0016】
また、第4の発明のミリ波レーダによる道路交通監視装置は、ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、上記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、上記道路車線の数及び上記道路車線の幅に基づいて道路配置を決定する道路配置決定手段と、上記道路配置に基づく上記道路車線ごとの車両の走行数を計測する計測手段と、を有して構成される。
【0017】
そして、第5の発明のミリ波レーダによる道路交通監視装置は、定期的にミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、上記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、上記道路車線の数及び上記道路車線の幅に基づいて道路配置を決定する道路配置決定手段と、上記道路配置に基づく上記道路車線ごとの車両の走行数を計測する計測手段と、を有して構成される。
【発明の効果】
【0018】
本発明によれば、道路交通監視装置を設置するだけで、検出した車両の走行軌跡を用いて装置側で自動的に道路の車線数、車線幅、中央分離帯などの道路配置情報を認識するので、道路交通監視装置に対して予めパラメータとして道路配置情報を与える必要がなくなり、これにより、設置箇所ごとに異なる道路配置であっても道路交通監視装置を現場に設置する際の道路配置の測量等の費用の多大な工数が削減されて経済性の向上に寄与することができる。
【0019】
また、定期的に車両の走行軌跡を用いて道路の車線数、車線幅、中央分離帯などの道路配置情報を自動的に認識するので、天候や工事等により車が規定車線に従って走行できない場合であっても、一時的に設定された車線毎に正確な通行車両数を計測することが可能になって、様々な環境下における道路交通監視に大きく寄与することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態を図面を参照しながら説明する。
【実施例1】
【0021】
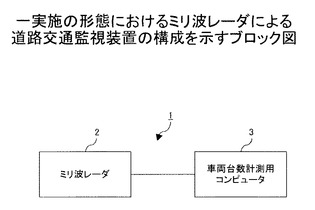
図1は一実施の形態におけるミリ波レーダによる道路交通監視装置の構成を示すブロック図である。同図に示すようにミリ波レーダによる道路交通監視装置1は、ミリ波送受信装置に相当するミリ波レーダ2と、このミリ波レーダ2に接続された車両台数計測用コンピュータ3とで構成される。
【0022】
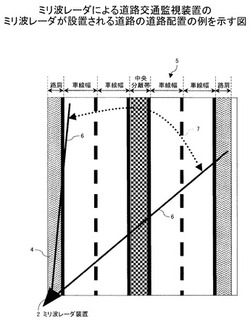
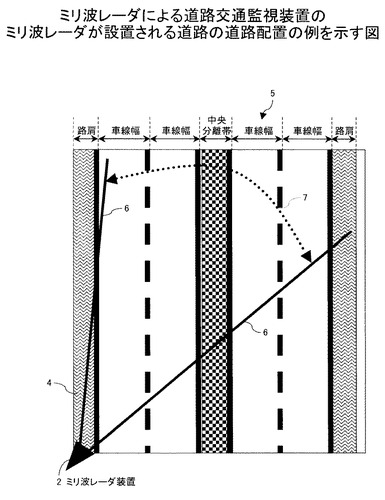
図2は、一実施の形態におけるミリ波レーダによる道路交通監視装置1のミリ波レーダ2が設置される道路の道路配置の例を示す図である。
同図に示すように、ミリ波レーダ2は、例えば路肩4などの予め近傍の道路全体を見渡せる位置に設置される。このミリ波レーダ2は、監視対象となる道路5に対してミリ波の細いビーム6を、破線で示す走査角度7の範囲で走査させながら発射し、その反射波を受信する。
【0023】
本例において、上記の走査では、ミリ波レーダ2を首振り駆動する不図示のモータの機能にもよるが、走査角度7は18°であり、走査の周期は400ミリ秒である。すなわち約2.5回/秒の割合で走査が行われることになる。
【0024】
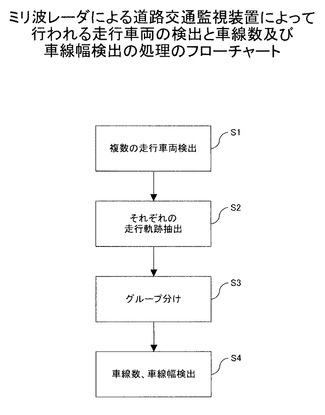
図3は、ミリ波レーダによる道路交通監視装置1によって行われる走行車両の検出と車線数及び車線幅検出の処理のフローチャートである。
図3において、先ず、複数の走行車両の検出を行う(S1)。この処理では、ミリ波レーダ2により照射されたミリ波ビーム7の反射波受信までの時間や、ドップラーシフトの関係から、ミリ波レーダ2からの距離、方向角度、速度等を算出し、その結果から車両検出を行なう。
【0025】
走行車両検出には、例えば、特許文献3に示されている方法を用いる。この走行車両の検出では、走行車両数や停止車両の有無等の交通情報も検出される。
また、検出する車両台数に上限はなく、ミリ波ビーム7による計測周期ごとに車両の検出が実施される。
【0026】
次に、この走行車両の検出結果を用いて車両の走行軌跡を求める(S2)。この処理では、走行車両の検出結果を、ミリ波レーダ2の設置位置を原点とするx−y道路座標軸上にプロットする。
【0027】
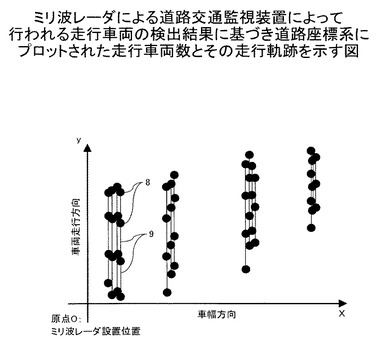
図4は、上記のようにミリ波レーダによる道路交通監視装置によって行われる走行車両の検出結果に基づき道路座標系にプロットされた走行車両数とその走行軌跡を示す図である。
【0028】
図4は、ミリ波レーダ2の設置位置を原点0とするx−y道路座標を示し、横軸xに車線幅方向を示し、縦軸yに車両走行方向を示している。黒丸のプロット8は4周期の走査によって得られた検出車両の位置を示している。
【0029】
縦軸yの車両走行方向に4個の黒丸のプロット8を結んだ線9は、個々の走行車両の走行軌跡を示している。
一般に、車両は、車道範囲内での走行位置に多少のばらつきはあるが、通常は規定された車線範囲内を走行するため、図4に示すように走行軌跡9の密度が濃くなる部分と密度が薄くなる部分に大きく分けることができる。
【0030】
図3に戻り、上記走行軌跡の抽出に続いて、グループ分けを行う(S3)。この処理は走行車両数と車線幅方向の関係をグラフ化して走行箇所(車線)を抽出する処理である。
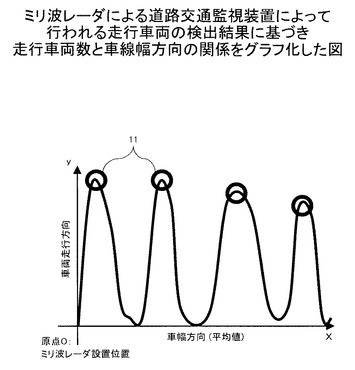
図5は、上記のミリ波レーダによる道路交通監視装置によって行われる走行車両の検出結果に基づき走行車両数と車線幅方向の関係をグラフ化した図である。
【0031】
同図は横軸xに車線幅方向を示し、縦軸yに車両走行数を示している。尚、同図に示すグラフは、横軸xの車線幅方向の同一地点を通過した車両の平均値を示している。
すなわちx軸方向の値は、走行軌跡が車線変更等で一定値でない場合があるため、検出した走行軌跡の平均値をとる。
【0032】
例えば、1車両の走行プロット点として、3点[(a1,b1),(a2,b2),(a3,b3)]が検出されていたとすると、そのときのx軸の値としては「x=(a1+a2+a3)/3」のように算出する。
【0033】
図3に戻り、上記のグループ分けの結果に基づいて、車線数と車線幅の検出を行う(S4)。この処理では、先ず、図5に示すように、得られたグラフは、図4の場合と同様に、走行車両数が多くなる区間と少ない区間に分かれる。すなわち、山と谷とに起伏するグラフになる。
【0034】
この結果から、走行車両数が多くなる山の頂点に当る部分11の個数を検出することにより車線数を検出する。また、上記のグラフにより、頂点部分を1つ含み、かつ谷部分までの幅を1つの車線と判断することで、各車線の幅を推定する。
【0035】
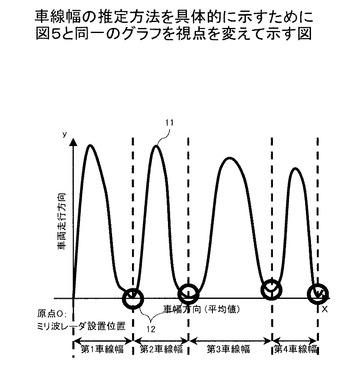
図6は、車線幅の推定方法を具体的に示すために図5と同一のグラフを視点を変えて示している。すなわち、図6に示す走行車両数の谷12となる部分を車線の切れ目と判断する。
【0036】
換言すれば、走行車両数が多くなる山の頂点に当る部分11を1つ含み、かつ頂点11を挟む谷部分12と谷部分12までの幅を1つの車線と判断する。これにより、各車線の幅を推定する。
【0037】
図6では、この方法によって推定された第1車線幅、第2車線幅、第3車線幅、及び第4車線幅を示している。尚、図6では、第3車線幅のみが他の車線幅より極端に広くなっている。このことから、図6で第3車線幅としている中に、本当の第3車線の幅と中央分離帯の幅とが含まれていること及び、本当の第3車線の幅は他の車線幅と同等であるはずなので、他の車線幅との差分から、その中央分離帯の幅を推定することができる。
【0038】
尚、本例の道路配置の自動判別では、路肩の存在は重要なものではないので、とりあえず、ミリ波レーダ2と道路端までの距離を路肩とする。これで、全ての道路配置が判明する。
【0039】
また、本例では上記車線数と車線幅の検出処理は、例えば5分に1回の割合で実施される。そして、検出された車線数と車線幅に従って、図3の処理S1に示した走行車両の検出を繰り返して、交通流計測を実施する。
【0040】
このように、ミリ波レーダによる道路交通監視装置1においては、装置自身で道路配置を認識して、交通監視及び交通流計測を行うので、道路配置を示すパラメータの事前入力を必要とせず、道路交通監視装置の設置が容易である。
【0041】
また、同様に装置自身で道路配置を認識するので、この認識処理を定期的に行なうことにより、規定された車線と実際に走行している位置が強制的にずれてしまうような状況になった場合でも対応できる。
【0042】
したがって、従来のように固定された道路配置のデータに基づいて交通流計測を行なう場合よりも、道路環境の変化に容易に対応できるので、処理能力に優れた道路交通監視装置を提供することが可能となる。
【0043】
ここで、上述した各処理における演算と判断の基準について更に説明する。
<車線の切り分け方法>
始めに、車線幅x軸方向を定間隔で分割した走行台数カウント用の配列X[]を用意する。そして、求めた走行軌跡のx座標を元に、配列X[]に台数カウントを行なう。
【0044】
例えば、定間隔=20cm、車線幅10m分の配列を用意する場合はX[50]となる。そして、走行軌跡x座標が4.5mの場合は、X[22]に1台数をカウントする。
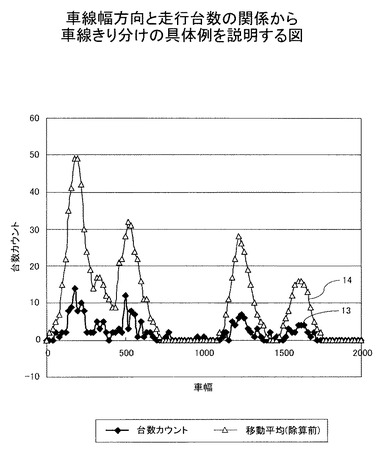
図7は、車線幅方向と走行台数の関係から車線きり分けの具体例を説明する図である。同図は横軸xに車線幅方向を示し、縦軸yに台数カウントを示している。同図は4車線道路データを再生処理し、走行軌跡を使って車線幅ごとに台数カウントしたものである。
【0045】
黒四角でプロットしたグラフ13は台数カウントを示し、白三角でプロットしたグラフ14は、グラフ13の移動平均(除算前)を取って滑らかにしたものでる。
同図を目視すると、グラフのピークが4つあるため4車線あることが分かるが、ここで考慮すべき点は、車線ごとに走行台数が異なるため、単に閾値を用意して台数カウントX[]がそれを超える場合を走行車線と決定することはできないということである。
【0046】
そのため、「横位置を示す」データがその近辺データと比較して、どの程度の重みがあるかによって走行車線かどうかを判断する。
データの重み計算を行なうため、配列X[]を使って2種類の移動平均を求める。
【0047】
(1)前後を含めて1mとなるデータの移動平均Xave1[]
(2)前後を含めて3mとなるデータの移動平均Xave2[]
尚、ここでの「1m」は、特徴点としての走行台数のピークの値を取得するために、実際の車両の横幅より狭い範囲の横位置情報を抽出するための値であり、「3m」は、大型車の幅2.5mとし、マージン0.5m程度を加えて考慮したものである。
【0048】
この設定のもとに、データの重み計算では、Xave2[]の範囲内で、Xave1[]がどの程度の割合を占めているかを下記のように計算する。
ratio[]=Xave1[]/Xave2[]×100(%)
上記計算によって求めた重み(ratio[])が閾値(%)を超える箇所を1車線と判断する。ただし、閾値(%)以上の箇所が2.5m以内(大型車の幅想定)にある場合は、同一車線と判断する。例えば、設定閾値=50%の場合などである。
【0049】
そして、1車線と判断したratio群で最大のratio[]をその車線の中央と定義し、隣接車線のratio群の中央との中間までを1車線幅とする。
なお上記説明は特徴点を抽出するためのフィルタリングの1手法として移動平均を用いたが、本願はこれに限るものではない。
【0050】
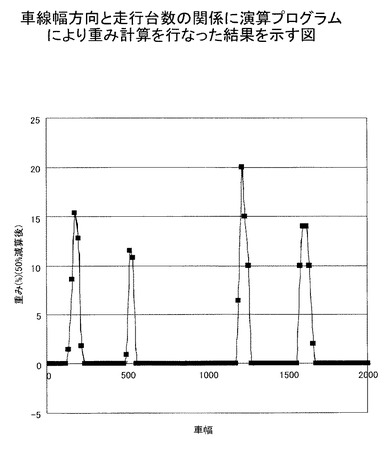
図8は、上記の車線幅方向と走行台数の関係に演算プログラムにより重み計算を行なった結果を示す図である。同図は横軸に車線幅方向を示し、縦軸に50%減算後の重み(%)を示している。
【0051】
図8において、群の頂点から隣接群の頂点までの中間で区切ることで、車線の切り分けを行なうことが可能となる。また、これに後述する中央分離帯、路肩幅の算出計算も考慮すると、更に道路形状が認識できる。
【0052】
<中央分離帯>
走行軌跡の速度成分方向が正から負に切り替わる境界部分が中央分離帯となる。
以下の2点を検索し、中央分離帯幅を求める。
【0053】
(1)速度が+成分の走行軌跡の中で、x軸方向で最右となるx座標xPlus
(2)速度が−成分の走行軌跡の中で、x軸方向で最左となるx座標xMinus
この設定のもとに、中央分離帯幅Cswは、下記のようにして求められる。
【0054】
Csw=xMinus−xPlus
<路肩幅>
従来技術のように道路配置パラメータを固定して行なう場合は、ミリ波レーダと道路の位置関係が分かっていないと車線判別ができなかったため、ミリ波レーダと車線端の距離が必要であった。例えば、ミリ波レーダが路肩上に設置してある場合には、路肩幅パラメータが必要であった。ここでいう路肩幅パラメータとは、実際の路肩幅ではなく、図2にあるようにミリ波レーダ位置から車線の左端に相当する幅のことである。またミリ波レーダが車線上に設置してある場合にも、ミリ波レーダ位置から車線の左端に相当する幅が必要であった。
【0055】
しかし、本発明のように車線位置を走行軌跡から認識して処理を行なう場合は、ミリ波レーダ2と道路の位置関係は意識する必要がなくなるため、上記記載のミリ波レーダ位置から車線の左端に相当する幅は求める必要がなくなる。
【0056】
ただ、強いて求めようとするなら、速度が+成分の走行軌跡の中で、x軸方向で最左となるx座標から座標原点までの距離が路肩幅だと判断できる。
<計測範囲のエリア設定と座標変換>
本例のミリ波レーダによる道路交通監視装置1では、走行車両の検出を求める過程で、状況に応じて複数の座標系を活用し、位置計算を行う。このように複数の座標系を用いるのは、以下の理由による。
【0057】
第1に、ミリ波レーダ2では1軸走査を行っている。従ってそこからの出力は、ミリ波レーダ設置位置を原点に取り、原点位置からの距離と走査角度の、極座標系(ミリ波レーダ極座標)出力となっている。
【0058】
第2に、車両台数計測用コンピュータ3では、道路線形に合わせた直行座標系(道路座標と称す)を持つ。したがって、極座標系を道路座標に変換する必要がある。
この極座標系を道路座標に変換するに当たり、本例では内部的に、「ミリ波レーダ極座標」→「ミリ波ローカル座標」→「ミリ波ワールド座標」→「道路座標」の順に座標を変換する。以下に、これら用いる座標系について、個々に記述する。
【0059】
(a) ミリ波レーダ極座標
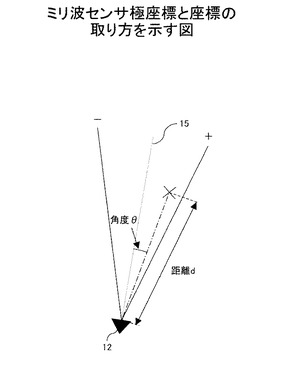
図9は、ミリ波レーダ極座標と座標の取り方を示す図である。ミリ波レーダ2からのデータは、図9に示すような極座標系の出力となっている。
【0060】
破線15で示す扇形中心位置は、一例として、走査角が0度(原点)の時にミリ波レーダが向いている方向となっている。また、この破線15からミリ波レーダに向かって右側が、角度のプラス方向、左側が角度のマイナス方向となっている。
【0061】
ミリ波レーダ極座標での座標表現は、座標(距離d、角度θ)となる。これはミリ波反射点の座標を表したものであるが、さらに各点は速度、反射強度の情報を持っている。
車両台数計測用コンピュータ3では、極座標系のデータを用いて処理を行い、道路座標に出力する手前で以下に示す(b)から(d)の座標系へ出力形式の変換処理を行う。
【0062】
(b) ミリ波ローカル座標
道路座標への座標変換の第一段階として、ミリ波ローカル座標へと座標変換を行う。
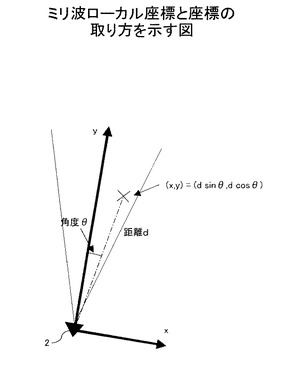
図10は、ミリ波ローカル座標と座標の取り方を示す図である。同図に示すように、座標変換は、(a)の極座標の破線部分を軸とする直行座標に変換する。
【0063】
この時の変換式は、
x=距離d×cosθ
y=距離d×sinθ
となる。
【0064】
(c) ミリ波ワールド座標
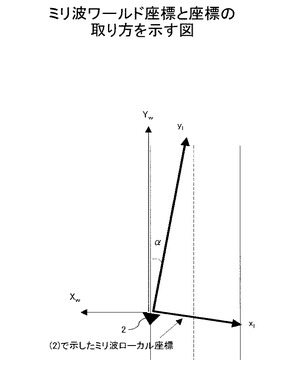
図9で示した破線15(ミリ波レーダ角度の原点)と、道路の進行方向ベクトルには、ずれがあるので、これを道路の進行方向ベクトルに合わせるように変換する。ここで作成される座標系をミリ波ワールド座標と呼ぶ。
【0065】
図11は、ミリ波ワールド座標と座標の取り方を示す図である。同図に示すように、道路の進行方向ベクトルとミリ波ローカル座標とのなす角をαとすると、ミリ波ローカル座標の (x1 ,y1 )は、以下の式(1)を用いてミリ波ワールド座標における位置(Xw ,Yw )に変換できる。
【0066】
【数1】

【0067】
(d) 道路座標
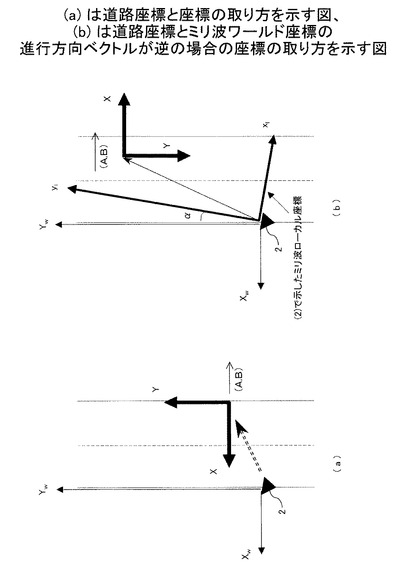
車両台数計測用コンピュータ3では、道路線形に合わせた直行座標系、道路座標を持つ。道路座標とミリ波ワールド座標との関係は、設置条件毎に異なるが道路の進行方向ベクトルとミリ波ワールド座標の進行方向ベクトルが同じ方向の場合、平行移動することで座標変換できる。
【0068】
図12(a) は、道路座標と座標の取り方を示し、同図(b) は、道路座標とミリ波ワールド座標の進行方向ベクトルが逆の場合の座標の取り方を示す図である。
ここで、ミリ波ワールド座標の原点からミリ波ローカル座標の原点へのX方向、Y方向それぞれの平行移動量をA、Bとすると、以下の式(2)で変換できる。
【0069】
【数2】
【0070】
ここで、ミリ波ローカル座標から道路座標への変換は、(c) の式(1)とこの式(2)とをかけて、下記の式(3)で表すことができる。
【0071】
【数3】
【0072】
図12(b) に示す道路座標とミリ波ワールド座標の進行方向ベクトルが逆の場合は、ミリ波ワールド座標から道路座標への変換は、180度回転と平行移動となる。ミリ波ローカル座標から道路座標への変換を考えると(α−180)度回転と平行移動となるが、αを符号を適切に取ることにより、式(3)と同様に表すことができる。
尚、走行車両の計測には、ミリ波レーダに限ることなく、画像系センサ、超音波センサ等を用いてもよい。
【0073】
(付記1)
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、
前記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、
を有することを特徴とする道路交通監視装置。
(付記2)
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、
前記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、
を有することを特徴とする道路交通監視装置。
(付記3)
前記道路車線の数及び前記道路車線の幅に基づいて道路配置を決定する道路配置決定手段を更に有することを特徴とする付記1及び2記載の道路交通監視装置。
(付記4)
前記道路配置に基づく前記道路車線ごとの車両の走行数を計測する計測手段を更に有することを特徴とする付記3記載の道路交通監視装置。
(付記5)
前記走行軌跡取得手段は、定期的にミリ波レーダにより道路を通過する車両の走行軌跡を取得することを特徴とする付記1記載の道路交通監視装置。
(付記6)
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得工程と、
前記走行軌跡に基づいて道路車線の数を決定する道路車線数決定工程と、
を含むことを特徴とする道路交通監視方法。
(付記7)
少なくとも道路交通監視処理をコンピュータに実行させるプログラムであって、
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する処理と、
前記走行軌跡に基づいて道路車線の数を決定する処理と、
を前記コンピュータに実行させることを特徴とするプログラム。
【図面の簡単な説明】
【0074】
【図1】一実施の形態におけるミリ波レーダによる道路交通監視装置の構成を示すブロック図である。
【図2】ミリ波レーダによる道路交通監視装置のミリ波レーダが設置される道路の道路配置の例を示す図である。
【図3】ミリ波レーダによる道路交通監視装置によって行われる走行車両の検出と車線数及び車線幅検出の処理のフローチャートである。
【図4】ミリ波レーダによる道路交通監視装置によって行われる走行車両の検出結果に基づき道路座標系にプロットされた走行車両数とその走行軌跡を示す図である。
【図5】ミリ波レーダによる道路交通監視装置によって行われる走行車両の検出結果に基づき走行車両数と車線幅方向の関係をグラフ化した図である。
【図6】車線幅の推定方法を具体的に示すために図5と同一のグラフを視点を変えて示す図である。
【図7】車線幅方向と走行台数の関係から車線きり分けの具体例を説明する図である。
【図8】車線幅方向と走行台数の関係に演算プログラムにより重み計算を行なった結果を示す図である。
【図9】ミリ波レーダ極座標と座標の取り方を示す図である。
【図10】ミリ波ローカル座標と座標の取り方を示す図である。
【図11】ミリ波ワールド座標と座標の取り方を示す図である。
【図12】(a) は道路座標と座標の取り方を示す図、(b) は道路座標とミリ波ワールド座標の進行方向ベクトルが逆の場合の座標の取り方を示す図である。
【符号の説明】
【0075】
1 ミリ波レーダによる道路交通監視装置
2 ミリ波レーダ
3 車両台数計測用コンピュータ
4 路肩
5 道路
6 ミリ波ビーム
7 走査角度
8 検出車両の位置を示すプロット
9 個々の走行車両の走行軌跡
11 走行車両数の頂点
12 走行車両数の谷
13 台数カウントグラフ
14 移動平均(除算前)グラフ
15 走査角が0度(原点)の方向
【技術分野】
【0001】
本発明は、ミリ波レーダにより車線数と各車線幅を自動的に判別して車両交通量を監視する道路交通監視装置に関する。
【背景技術】
【0002】
従来、道路を走行する車両の数が多くなるに伴い、走行中の車両を監視する各種の車両監視装置や監視方法が提案されている。
例えば、交差点に進入する車両につき、ビデオ画像から抽出した車両軌跡をもとに、右折、左折、直進車両を判別して、それぞれの交通量を測定するようにした車両感知装置が提案されている。(例えば、特許文献1参照。)
また、特定の車両発見領域を設けずに、所定周期で撮影された画像から車両位置を経時的に追跡して得る軌跡データを元に、道路を通行する車両を的確に検出して交通量を計測する道路交通流計測装置及び計測方法が提案されている。(例えば、特許文献2参照。)
また、全天候下で走行車両の追跡検出を確実に行い、出合頭の衝突や見通し不良の交差点での追突を防止するミリ波レーダによる走行車両検出方法が提案されている。(例えば、特許文献3参照。)
ところで、上記のように走行車両の検出を行っても、その結果を用いて交通流の監視まで行うためには、車両がどの車線を走行しているのかを知る必要がある。
【0003】
そのためには、レーダ等の走行車両検出装置を設置する際に、その設置箇所の道路配置の詳細を測定し、その測定によって得られた道路の車線数、車線幅、中央分離帯幅等の道路配置のデータを、パラメータとして予め走行車両検出装置に接続されるコンピュータに与える必要がある。
【0004】
従来、走行車両検出装置に連動するコンピュータは、上記のようにして与えられたパラメータと走行車両検出装置による計測結果とを照合することによって、車両が走行している車線を判別するようにしていた。
【特許文献1】特開2000−090389号公報(要約、図1)
【特許文献2】特開2002−358595号公報(要約、図1)
【特許文献3】特開2002−099986号公報(要約、図1、図3)
【発明の開示】
【発明が解決しようとする課題】
【0005】
特許文献1の技術は、車両の軌跡から車両の進む方向を判断して車両の進む方向ごとの交通量を測定するものであり、車線そのものを認識するものではない。
また、特許文献2の技術は、初めから特定の車両発見領域を設けないことを前提としており、そこには、車線そのものを認識しようという思想は含まれていない。
【0006】
いずれにしても、これらの装置または方法は、ビデオ画像から車両の軌跡を求めるものであり、このように可視光又は赤外線のような画像センサを用いるものは、濃霧、降雨、降雪のような悪天候による視界不良時、または夜間等の薄暗い状況においては、車両検出が正確に行なうことができないという問題がある。
【0007】
これに対して特許文献3の技術は、悪天候等にも影響を受けにくいミリ波レーダによって全天候下において走行車両の追跡検出を確実に行うものではあるものの、衝突等の事故の防止を主眼としたものであって、車線そのものを認識しようという思想は含まれていない。
【0008】
また、計測範囲となる道路の車線数、車線幅、中央分離帯幅、路肩幅などの道路配置情報を予めパラメータとして走行車両検出装置に与える場合、事前に詳細な地図情報(測量データ)がない場合は、道路配置情報を取得するために、すなわち、実際に道路配置を測定するために、一時的に道路を閉鎖するような交通規制を行なうなどの手間が生じてしまう。
【0009】
そして、上述したように、その測定した道路配置のデータを走行車両検出装置に接続されたコンピュータにパラメータとして与える必要がある。このように、多大な工数と費用がかかるという問題があった。
【0010】
また、雪や霧等によって視界不良となる悪天候のときや積雪時には道路上の白線が確認しにくくなる。更には、中央分離帯や路肩に道路面から除雪された雪山があったりすると、車線が狭くなる場合がある。また、道路工事等によっては、通常の車線とは異なる車線が一時的に設けられたりすることも良く行われる。いずれにしても、車両は、規定車線に正しく従って走行できなくなる。
【0011】
そのような、車両が規定車道通りに走行できないようなときには、車線幅等の現実のパラメータが、予め与えられているパラメータから変動しているため、走行車両の正確な計測ができない、すなわち正確な道路監視ができないという問題が生じる。
【0012】
本発明の課題は、上記従来の実情に鑑み、ミリ波レーダにより走行車両を計測し車線数、各車線幅、中央分離帯幅などを自動的に判断しながら車両交通量を監視する道路交通監視装置を提供することである。
【課題を解決するための手段】
【0013】
先ず、第1の発明のミリ波レーダによる道路交通監視装置は、ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、を有して構成される。
【0014】
次に、第2の発明のミリ波レーダによる道路交通監視装置は、ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、を有して構成される。
【0015】
更に、第3の発明のミリ波レーダによる道路交通監視装置は、ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、上記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、上記道路車線の数及び上記道路車線の幅に基づいて道路配置を決定する道路配置決定手段と、を有して構成される。
【0016】
また、第4の発明のミリ波レーダによる道路交通監視装置は、ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、上記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、上記道路車線の数及び上記道路車線の幅に基づいて道路配置を決定する道路配置決定手段と、上記道路配置に基づく上記道路車線ごとの車両の走行数を計測する計測手段と、を有して構成される。
【0017】
そして、第5の発明のミリ波レーダによる道路交通監視装置は、定期的にミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、上記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、上記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、上記道路車線の数及び上記道路車線の幅に基づいて道路配置を決定する道路配置決定手段と、上記道路配置に基づく上記道路車線ごとの車両の走行数を計測する計測手段と、を有して構成される。
【発明の効果】
【0018】
本発明によれば、道路交通監視装置を設置するだけで、検出した車両の走行軌跡を用いて装置側で自動的に道路の車線数、車線幅、中央分離帯などの道路配置情報を認識するので、道路交通監視装置に対して予めパラメータとして道路配置情報を与える必要がなくなり、これにより、設置箇所ごとに異なる道路配置であっても道路交通監視装置を現場に設置する際の道路配置の測量等の費用の多大な工数が削減されて経済性の向上に寄与することができる。
【0019】
また、定期的に車両の走行軌跡を用いて道路の車線数、車線幅、中央分離帯などの道路配置情報を自動的に認識するので、天候や工事等により車が規定車線に従って走行できない場合であっても、一時的に設定された車線毎に正確な通行車両数を計測することが可能になって、様々な環境下における道路交通監視に大きく寄与することができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態を図面を参照しながら説明する。
【実施例1】
【0021】
図1は一実施の形態におけるミリ波レーダによる道路交通監視装置の構成を示すブロック図である。同図に示すようにミリ波レーダによる道路交通監視装置1は、ミリ波送受信装置に相当するミリ波レーダ2と、このミリ波レーダ2に接続された車両台数計測用コンピュータ3とで構成される。
【0022】
図2は、一実施の形態におけるミリ波レーダによる道路交通監視装置1のミリ波レーダ2が設置される道路の道路配置の例を示す図である。
同図に示すように、ミリ波レーダ2は、例えば路肩4などの予め近傍の道路全体を見渡せる位置に設置される。このミリ波レーダ2は、監視対象となる道路5に対してミリ波の細いビーム6を、破線で示す走査角度7の範囲で走査させながら発射し、その反射波を受信する。
【0023】
本例において、上記の走査では、ミリ波レーダ2を首振り駆動する不図示のモータの機能にもよるが、走査角度7は18°であり、走査の周期は400ミリ秒である。すなわち約2.5回/秒の割合で走査が行われることになる。
【0024】
図3は、ミリ波レーダによる道路交通監視装置1によって行われる走行車両の検出と車線数及び車線幅検出の処理のフローチャートである。
図3において、先ず、複数の走行車両の検出を行う(S1)。この処理では、ミリ波レーダ2により照射されたミリ波ビーム7の反射波受信までの時間や、ドップラーシフトの関係から、ミリ波レーダ2からの距離、方向角度、速度等を算出し、その結果から車両検出を行なう。
【0025】
走行車両検出には、例えば、特許文献3に示されている方法を用いる。この走行車両の検出では、走行車両数や停止車両の有無等の交通情報も検出される。
また、検出する車両台数に上限はなく、ミリ波ビーム7による計測周期ごとに車両の検出が実施される。
【0026】
次に、この走行車両の検出結果を用いて車両の走行軌跡を求める(S2)。この処理では、走行車両の検出結果を、ミリ波レーダ2の設置位置を原点とするx−y道路座標軸上にプロットする。
【0027】
図4は、上記のようにミリ波レーダによる道路交通監視装置によって行われる走行車両の検出結果に基づき道路座標系にプロットされた走行車両数とその走行軌跡を示す図である。
【0028】
図4は、ミリ波レーダ2の設置位置を原点0とするx−y道路座標を示し、横軸xに車線幅方向を示し、縦軸yに車両走行方向を示している。黒丸のプロット8は4周期の走査によって得られた検出車両の位置を示している。
【0029】
縦軸yの車両走行方向に4個の黒丸のプロット8を結んだ線9は、個々の走行車両の走行軌跡を示している。
一般に、車両は、車道範囲内での走行位置に多少のばらつきはあるが、通常は規定された車線範囲内を走行するため、図4に示すように走行軌跡9の密度が濃くなる部分と密度が薄くなる部分に大きく分けることができる。
【0030】
図3に戻り、上記走行軌跡の抽出に続いて、グループ分けを行う(S3)。この処理は走行車両数と車線幅方向の関係をグラフ化して走行箇所(車線)を抽出する処理である。
図5は、上記のミリ波レーダによる道路交通監視装置によって行われる走行車両の検出結果に基づき走行車両数と車線幅方向の関係をグラフ化した図である。
【0031】
同図は横軸xに車線幅方向を示し、縦軸yに車両走行数を示している。尚、同図に示すグラフは、横軸xの車線幅方向の同一地点を通過した車両の平均値を示している。
すなわちx軸方向の値は、走行軌跡が車線変更等で一定値でない場合があるため、検出した走行軌跡の平均値をとる。
【0032】
例えば、1車両の走行プロット点として、3点[(a1,b1),(a2,b2),(a3,b3)]が検出されていたとすると、そのときのx軸の値としては「x=(a1+a2+a3)/3」のように算出する。
【0033】
図3に戻り、上記のグループ分けの結果に基づいて、車線数と車線幅の検出を行う(S4)。この処理では、先ず、図5に示すように、得られたグラフは、図4の場合と同様に、走行車両数が多くなる区間と少ない区間に分かれる。すなわち、山と谷とに起伏するグラフになる。
【0034】
この結果から、走行車両数が多くなる山の頂点に当る部分11の個数を検出することにより車線数を検出する。また、上記のグラフにより、頂点部分を1つ含み、かつ谷部分までの幅を1つの車線と判断することで、各車線の幅を推定する。
【0035】
図6は、車線幅の推定方法を具体的に示すために図5と同一のグラフを視点を変えて示している。すなわち、図6に示す走行車両数の谷12となる部分を車線の切れ目と判断する。
【0036】
換言すれば、走行車両数が多くなる山の頂点に当る部分11を1つ含み、かつ頂点11を挟む谷部分12と谷部分12までの幅を1つの車線と判断する。これにより、各車線の幅を推定する。
【0037】
図6では、この方法によって推定された第1車線幅、第2車線幅、第3車線幅、及び第4車線幅を示している。尚、図6では、第3車線幅のみが他の車線幅より極端に広くなっている。このことから、図6で第3車線幅としている中に、本当の第3車線の幅と中央分離帯の幅とが含まれていること及び、本当の第3車線の幅は他の車線幅と同等であるはずなので、他の車線幅との差分から、その中央分離帯の幅を推定することができる。
【0038】
尚、本例の道路配置の自動判別では、路肩の存在は重要なものではないので、とりあえず、ミリ波レーダ2と道路端までの距離を路肩とする。これで、全ての道路配置が判明する。
【0039】
また、本例では上記車線数と車線幅の検出処理は、例えば5分に1回の割合で実施される。そして、検出された車線数と車線幅に従って、図3の処理S1に示した走行車両の検出を繰り返して、交通流計測を実施する。
【0040】
このように、ミリ波レーダによる道路交通監視装置1においては、装置自身で道路配置を認識して、交通監視及び交通流計測を行うので、道路配置を示すパラメータの事前入力を必要とせず、道路交通監視装置の設置が容易である。
【0041】
また、同様に装置自身で道路配置を認識するので、この認識処理を定期的に行なうことにより、規定された車線と実際に走行している位置が強制的にずれてしまうような状況になった場合でも対応できる。
【0042】
したがって、従来のように固定された道路配置のデータに基づいて交通流計測を行なう場合よりも、道路環境の変化に容易に対応できるので、処理能力に優れた道路交通監視装置を提供することが可能となる。
【0043】
ここで、上述した各処理における演算と判断の基準について更に説明する。
<車線の切り分け方法>
始めに、車線幅x軸方向を定間隔で分割した走行台数カウント用の配列X[]を用意する。そして、求めた走行軌跡のx座標を元に、配列X[]に台数カウントを行なう。
【0044】
例えば、定間隔=20cm、車線幅10m分の配列を用意する場合はX[50]となる。そして、走行軌跡x座標が4.5mの場合は、X[22]に1台数をカウントする。
図7は、車線幅方向と走行台数の関係から車線きり分けの具体例を説明する図である。同図は横軸xに車線幅方向を示し、縦軸yに台数カウントを示している。同図は4車線道路データを再生処理し、走行軌跡を使って車線幅ごとに台数カウントしたものである。
【0045】
黒四角でプロットしたグラフ13は台数カウントを示し、白三角でプロットしたグラフ14は、グラフ13の移動平均(除算前)を取って滑らかにしたものでる。
同図を目視すると、グラフのピークが4つあるため4車線あることが分かるが、ここで考慮すべき点は、車線ごとに走行台数が異なるため、単に閾値を用意して台数カウントX[]がそれを超える場合を走行車線と決定することはできないということである。
【0046】
そのため、「横位置を示す」データがその近辺データと比較して、どの程度の重みがあるかによって走行車線かどうかを判断する。
データの重み計算を行なうため、配列X[]を使って2種類の移動平均を求める。
【0047】
(1)前後を含めて1mとなるデータの移動平均Xave1[]
(2)前後を含めて3mとなるデータの移動平均Xave2[]
尚、ここでの「1m」は、特徴点としての走行台数のピークの値を取得するために、実際の車両の横幅より狭い範囲の横位置情報を抽出するための値であり、「3m」は、大型車の幅2.5mとし、マージン0.5m程度を加えて考慮したものである。
【0048】
この設定のもとに、データの重み計算では、Xave2[]の範囲内で、Xave1[]がどの程度の割合を占めているかを下記のように計算する。
ratio[]=Xave1[]/Xave2[]×100(%)
上記計算によって求めた重み(ratio[])が閾値(%)を超える箇所を1車線と判断する。ただし、閾値(%)以上の箇所が2.5m以内(大型車の幅想定)にある場合は、同一車線と判断する。例えば、設定閾値=50%の場合などである。
【0049】
そして、1車線と判断したratio群で最大のratio[]をその車線の中央と定義し、隣接車線のratio群の中央との中間までを1車線幅とする。
なお上記説明は特徴点を抽出するためのフィルタリングの1手法として移動平均を用いたが、本願はこれに限るものではない。
【0050】
図8は、上記の車線幅方向と走行台数の関係に演算プログラムにより重み計算を行なった結果を示す図である。同図は横軸に車線幅方向を示し、縦軸に50%減算後の重み(%)を示している。
【0051】
図8において、群の頂点から隣接群の頂点までの中間で区切ることで、車線の切り分けを行なうことが可能となる。また、これに後述する中央分離帯、路肩幅の算出計算も考慮すると、更に道路形状が認識できる。
【0052】
<中央分離帯>
走行軌跡の速度成分方向が正から負に切り替わる境界部分が中央分離帯となる。
以下の2点を検索し、中央分離帯幅を求める。
【0053】
(1)速度が+成分の走行軌跡の中で、x軸方向で最右となるx座標xPlus
(2)速度が−成分の走行軌跡の中で、x軸方向で最左となるx座標xMinus
この設定のもとに、中央分離帯幅Cswは、下記のようにして求められる。
【0054】
Csw=xMinus−xPlus
<路肩幅>
従来技術のように道路配置パラメータを固定して行なう場合は、ミリ波レーダと道路の位置関係が分かっていないと車線判別ができなかったため、ミリ波レーダと車線端の距離が必要であった。例えば、ミリ波レーダが路肩上に設置してある場合には、路肩幅パラメータが必要であった。ここでいう路肩幅パラメータとは、実際の路肩幅ではなく、図2にあるようにミリ波レーダ位置から車線の左端に相当する幅のことである。またミリ波レーダが車線上に設置してある場合にも、ミリ波レーダ位置から車線の左端に相当する幅が必要であった。
【0055】
しかし、本発明のように車線位置を走行軌跡から認識して処理を行なう場合は、ミリ波レーダ2と道路の位置関係は意識する必要がなくなるため、上記記載のミリ波レーダ位置から車線の左端に相当する幅は求める必要がなくなる。
【0056】
ただ、強いて求めようとするなら、速度が+成分の走行軌跡の中で、x軸方向で最左となるx座標から座標原点までの距離が路肩幅だと判断できる。
<計測範囲のエリア設定と座標変換>
本例のミリ波レーダによる道路交通監視装置1では、走行車両の検出を求める過程で、状況に応じて複数の座標系を活用し、位置計算を行う。このように複数の座標系を用いるのは、以下の理由による。
【0057】
第1に、ミリ波レーダ2では1軸走査を行っている。従ってそこからの出力は、ミリ波レーダ設置位置を原点に取り、原点位置からの距離と走査角度の、極座標系(ミリ波レーダ極座標)出力となっている。
【0058】
第2に、車両台数計測用コンピュータ3では、道路線形に合わせた直行座標系(道路座標と称す)を持つ。したがって、極座標系を道路座標に変換する必要がある。
この極座標系を道路座標に変換するに当たり、本例では内部的に、「ミリ波レーダ極座標」→「ミリ波ローカル座標」→「ミリ波ワールド座標」→「道路座標」の順に座標を変換する。以下に、これら用いる座標系について、個々に記述する。
【0059】
(a) ミリ波レーダ極座標
図9は、ミリ波レーダ極座標と座標の取り方を示す図である。ミリ波レーダ2からのデータは、図9に示すような極座標系の出力となっている。
【0060】
破線15で示す扇形中心位置は、一例として、走査角が0度(原点)の時にミリ波レーダが向いている方向となっている。また、この破線15からミリ波レーダに向かって右側が、角度のプラス方向、左側が角度のマイナス方向となっている。
【0061】
ミリ波レーダ極座標での座標表現は、座標(距離d、角度θ)となる。これはミリ波反射点の座標を表したものであるが、さらに各点は速度、反射強度の情報を持っている。
車両台数計測用コンピュータ3では、極座標系のデータを用いて処理を行い、道路座標に出力する手前で以下に示す(b)から(d)の座標系へ出力形式の変換処理を行う。
【0062】
(b) ミリ波ローカル座標
道路座標への座標変換の第一段階として、ミリ波ローカル座標へと座標変換を行う。
図10は、ミリ波ローカル座標と座標の取り方を示す図である。同図に示すように、座標変換は、(a)の極座標の破線部分を軸とする直行座標に変換する。
【0063】
この時の変換式は、
x=距離d×cosθ
y=距離d×sinθ
となる。
【0064】
(c) ミリ波ワールド座標
図9で示した破線15(ミリ波レーダ角度の原点)と、道路の進行方向ベクトルには、ずれがあるので、これを道路の進行方向ベクトルに合わせるように変換する。ここで作成される座標系をミリ波ワールド座標と呼ぶ。
【0065】
図11は、ミリ波ワールド座標と座標の取り方を示す図である。同図に示すように、道路の進行方向ベクトルとミリ波ローカル座標とのなす角をαとすると、ミリ波ローカル座標の (x1 ,y1 )は、以下の式(1)を用いてミリ波ワールド座標における位置(Xw ,Yw )に変換できる。
【0066】
【数1】
【0067】
(d) 道路座標
車両台数計測用コンピュータ3では、道路線形に合わせた直行座標系、道路座標を持つ。道路座標とミリ波ワールド座標との関係は、設置条件毎に異なるが道路の進行方向ベクトルとミリ波ワールド座標の進行方向ベクトルが同じ方向の場合、平行移動することで座標変換できる。
【0068】
図12(a) は、道路座標と座標の取り方を示し、同図(b) は、道路座標とミリ波ワールド座標の進行方向ベクトルが逆の場合の座標の取り方を示す図である。
ここで、ミリ波ワールド座標の原点からミリ波ローカル座標の原点へのX方向、Y方向それぞれの平行移動量をA、Bとすると、以下の式(2)で変換できる。
【0069】
【数2】
【0070】
ここで、ミリ波ローカル座標から道路座標への変換は、(c) の式(1)とこの式(2)とをかけて、下記の式(3)で表すことができる。
【0071】
【数3】
【0072】
図12(b) に示す道路座標とミリ波ワールド座標の進行方向ベクトルが逆の場合は、ミリ波ワールド座標から道路座標への変換は、180度回転と平行移動となる。ミリ波ローカル座標から道路座標への変換を考えると(α−180)度回転と平行移動となるが、αを符号を適切に取ることにより、式(3)と同様に表すことができる。
尚、走行車両の計測には、ミリ波レーダに限ることなく、画像系センサ、超音波センサ等を用いてもよい。
【0073】
(付記1)
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、
前記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、
を有することを特徴とする道路交通監視装置。
(付記2)
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、
前記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、
を有することを特徴とする道路交通監視装置。
(付記3)
前記道路車線の数及び前記道路車線の幅に基づいて道路配置を決定する道路配置決定手段を更に有することを特徴とする付記1及び2記載の道路交通監視装置。
(付記4)
前記道路配置に基づく前記道路車線ごとの車両の走行数を計測する計測手段を更に有することを特徴とする付記3記載の道路交通監視装置。
(付記5)
前記走行軌跡取得手段は、定期的にミリ波レーダにより道路を通過する車両の走行軌跡を取得することを特徴とする付記1記載の道路交通監視装置。
(付記6)
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得工程と、
前記走行軌跡に基づいて道路車線の数を決定する道路車線数決定工程と、
を含むことを特徴とする道路交通監視方法。
(付記7)
少なくとも道路交通監視処理をコンピュータに実行させるプログラムであって、
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する処理と、
前記走行軌跡に基づいて道路車線の数を決定する処理と、
を前記コンピュータに実行させることを特徴とするプログラム。
【図面の簡単な説明】
【0074】
【図1】一実施の形態におけるミリ波レーダによる道路交通監視装置の構成を示すブロック図である。
【図2】ミリ波レーダによる道路交通監視装置のミリ波レーダが設置される道路の道路配置の例を示す図である。
【図3】ミリ波レーダによる道路交通監視装置によって行われる走行車両の検出と車線数及び車線幅検出の処理のフローチャートである。
【図4】ミリ波レーダによる道路交通監視装置によって行われる走行車両の検出結果に基づき道路座標系にプロットされた走行車両数とその走行軌跡を示す図である。
【図5】ミリ波レーダによる道路交通監視装置によって行われる走行車両の検出結果に基づき走行車両数と車線幅方向の関係をグラフ化した図である。
【図6】車線幅の推定方法を具体的に示すために図5と同一のグラフを視点を変えて示す図である。
【図7】車線幅方向と走行台数の関係から車線きり分けの具体例を説明する図である。
【図8】車線幅方向と走行台数の関係に演算プログラムにより重み計算を行なった結果を示す図である。
【図9】ミリ波レーダ極座標と座標の取り方を示す図である。
【図10】ミリ波ローカル座標と座標の取り方を示す図である。
【図11】ミリ波ワールド座標と座標の取り方を示す図である。
【図12】(a) は道路座標と座標の取り方を示す図、(b) は道路座標とミリ波ワールド座標の進行方向ベクトルが逆の場合の座標の取り方を示す図である。
【符号の説明】
【0075】
1 ミリ波レーダによる道路交通監視装置
2 ミリ波レーダ
3 車両台数計測用コンピュータ
4 路肩
5 道路
6 ミリ波ビーム
7 走査角度
8 検出車両の位置を示すプロット
9 個々の走行車両の走行軌跡
11 走行車両数の頂点
12 走行車両数の谷
13 台数カウントグラフ
14 移動平均(除算前)グラフ
15 走査角が0度(原点)の方向
【特許請求の範囲】
【請求項1】
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、
前記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、
を有することを特徴とする道路交通監視装置。
【請求項2】
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、
前記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、
を有することを特徴とする道路交通監視装置。
【請求項3】
前記道路車線の数及び前記道路車線の幅に基づいて道路配置を決定する道路配置決定手段を更に有することを特徴とする請求項1及び2記載の道路交通監視装置。
【請求項4】
前記道路配置に基づく前記道路車線ごとの車両の走行数を計測する計測手段を更に有することを特徴とする請求項3記載の道路交通監視装置。
【請求項5】
前記走行軌跡取得手段は、定期的にミリ波レーダにより道路を通過する車両の走行軌跡を取得することを特徴とする請求項1記載の道路交通監視装置。
【請求項1】
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、
前記走行軌跡に基づいて道路車線の数を決定する道路車線数決定手段と、
を有することを特徴とする道路交通監視装置。
【請求項2】
ミリ波レーダにより道路を通過する車両の走行軌跡を取得する走行軌跡取得手段と、
前記走行軌跡に基づいて道路車線の幅を決定する道路車線幅決定手段と、
を有することを特徴とする道路交通監視装置。
【請求項3】
前記道路車線の数及び前記道路車線の幅に基づいて道路配置を決定する道路配置決定手段を更に有することを特徴とする請求項1及び2記載の道路交通監視装置。
【請求項4】
前記道路配置に基づく前記道路車線ごとの車両の走行数を計測する計測手段を更に有することを特徴とする請求項3記載の道路交通監視装置。
【請求項5】
前記走行軌跡取得手段は、定期的にミリ波レーダにより道路を通過する車両の走行軌跡を取得することを特徴とする請求項1記載の道路交通監視装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−257536(P2007−257536A)
【公開日】平成19年10月4日(2007.10.4)
【国際特許分類】
【出願番号】特願2006−83934(P2006−83934)
【出願日】平成18年3月24日(2006.3.24)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成19年10月4日(2007.10.4)
【国際特許分類】
【出願日】平成18年3月24日(2006.3.24)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]