
メダル識別装置、メダル識別方法及びメダル
【課題】メダルに多種の識別コードを記述すると共に、これらの識別コードを正確に読み取る。
【解決手段】メダル表面及び/又はメダル裏面に、同心円の凹凸パターンPで識別コードが記述されたメダルMの識別装置であって、メダルMの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出する磁気ヘッド2と、磁気ヘッド2の検出波形を複数の区間k1〜knに分け、各区間k1〜knに、凹凸パターンPの段差検出波形dが存在するか否かを判断すると共に、各区間k1〜knにおける段差検出波形dの有無をコード化する検出回路4と、を備え、コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しない。
【解決手段】メダル表面及び/又はメダル裏面に、同心円の凹凸パターンPで識別コードが記述されたメダルMの識別装置であって、メダルMの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出する磁気ヘッド2と、磁気ヘッド2の検出波形を複数の区間k1〜knに分け、各区間k1〜knに、凹凸パターンPの段差検出波形dが存在するか否かを判断すると共に、各区間k1〜knにおける段差検出波形dの有無をコード化する検出回路4と、を備え、コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、同心円の凹凸パターンで識別コードが記述されたメダルや、そのメダルを識別するためのメダル識別装置及びメダル識別方法に関する。
【背景技術】
【0002】
スロットマシン、パチスロ、アーケードゲーム機などを設置した遊技場では、遊技媒体として数多くのメダル(コイン)が使用されている。例えば、パチスロに使用されるメダルは、遊技場において所定の貸出単価で貸し出され、同遊技場において所定の交換率で景品に交換可能な擬似硬貨であって、メーカや機種に拘わらず共通で使用できるように、日本国内(沖縄県を除く)において寸法がほぼ統一されている。
【0003】
近年、他店のメダルを使用して遊技したり、他店のメダルを計数機に入れて景品に交換するといった不正行為が増えている。これは、メダル貸出単価の多様化が原因と考えられており、例えば、貸出単価が5円/枚の店で貸し出されたメダルを、貸出単価が20円/枚の店に持ち込んで遊技したり、景品に交換すれば、貸出単価の違いによる差益が生じてしまうからである。
なお、近年では、同一店舗内でメダル貸出単価を多様化するケースもあるが、説明が複雑になるので、同一店舗内であってもメダル貸出単価が異なるエリアは別店舗と見做すことにする。
【0004】
上記のような問題は、各店のメダルに固有の識別コードを付与し、この識別コードをパチスロや計数機において識別することにより解決可能である。そして、このようなメダル識別システムを構築するには、多種の識別コードを記述可能なメダル構造と、それを識別する技術の開発が不可欠である。例えば、近隣エリア(市町村や都道府県内)の遊技場に固有の識別コードを付与するのであれば、100〜1000種類程度の識別コードが必要であり、また、全国の遊技場に固有の識別コードを付与するのであれば、10000種類程度の識別コードが必要と思われる。
【0005】
比較的多くの識別コードを付与可能なメダルとしては、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルが知られている(例えば、特許文献1〜6参照)。同心円の凹凸パターンは、メダルが転がっていても、一意的に検出することができるだけでなく、1回のメダル通過で識別コードを2回読み取ることがことができるので、その一致にもとづいて、読み取りの正誤を判定できるという利点もある。そして、同心円の凹凸パターンを読み取る方法としては、光学的に読み取る方法や、磁気的に読み取る方法が知られている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−139437号公報
【特許文献2】特開平6−253912号公報
【特許文献3】特開平7−182469号公報
【特許文献4】特開2001−178959号公報
【特許文献5】特開2004−280750号公報
【特許文献6】特開2007−4421号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
同心円の凹凸パターンを光学的に読み取る方法によれば、レーザ光などを使用することにより、微細な凹凸パターンを読み取ることが可能であるが、微細な凹凸パターンを読み取るべく光学系を構成すると、装置が複雑になるだけでなく、高価な装置になってしまうという問題がある。また、光学的な読み取り方法では、メダルや光学系に汚れがあると、読み取り精度が著しく低下してしまうため、安定性や信頼性に欠けるという実用上の大きな問題がある。
【0008】
一方、同心円の凹凸パターンを磁気的に読み取る方法によれば、メダルに多少の汚れがあっても、読み取り精度に影響しないため、安定性や信頼性に優れている。しかしながら。磁気的な読み取り方法では、検出波形のシャープさに欠けるため、細かい凹凸パターンの読み取りが難しいという問題がある。例えば、メダルの表面又は裏面に形成された同心円の凹凸パターンを、メダルの表面又は裏面と密着状態又は近接状態で配置される磁気ヘッドで検出する場合、検出可能な凹凸パターンの最小幅寸法は、0.5〜1.0mmが限界であるため、直径が決まったパチスロ用メダルなどのメダルにおいては、記述可能な識別コードの種類に限りがあり、1000種類、10000種類といった多種の識別コードを記述することは困難であった。
【課題を解決するための手段】
【0009】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、請求項1の本発明は、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルの識別装置であって、前記メダルの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出する磁気ヘッドと、前記磁気ヘッドの検出波形を複数の区間に分け、各区間に、凹凸パターンの段差検出波形が存在するか否かを判断すると共に、各区間における段差検出波形の有無をコード化する検出回路と、を備え、前記コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しないことを特徴とする。
また、請求項2の発明にあっては、前記検出回路は、メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンの段差検出波形を判定して、当該判定時の時間を順次記憶し、メダル通過後に、メダル通過時間を複数の区間に分け、各区間における段差検出波形の有無を前記記憶時間にもとづいて判断してコード化することを特徴とする。
また、請求項3の発明にあっては、前記検出回路は、メダル通過中に、立上がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立上がり判定処理手段と、メダル通過中に、立下がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立下がり判定処理手段と、を別個に備えることを特徴とする。
また、請求項4の発明にあっては、前記検出回路は、メダル通過時の加速度を加味してメダル通過時間を複数の区間に分けることを特徴とする。
また、請求項5の発明にあっては、所定の基準周波数で自律的に発振すると共に、磁気ヘッドに設けられる検出コイルのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路を備え、前記検出回路は、前記発振回路から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルの凹凸パターンを検出することを特徴とする。
また、請求項6の発明にあっては、前記検出回路は、前記発振回路から出力される発振波の位相ズレ測定にもとづいて、メダルの凹凸パターンを検出するにあたり、前記発振回路から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定することを特徴とする。
また、請求項7の発明にあっては、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルの識別方法であって、前記メダルの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように磁気ヘッドを配置し、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出し、前記磁気ヘッドの検出波形を複数の区間に分け、各区間に、凹凸パターンの段差検出波形が存在するか否かを判断すると共に、各区間における段差検出波形の有無をコード化し、前記コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しないことを特徴とする。
また、請求項8の発明にあっては、メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンの段差検出波形を判定して、当該判定時の時間を順次記憶し、メダル通過後に、メダル通過時間を複数の区間に分け、各区間における段差検出波形の有無を前記記憶時間にもとづいて判断してコード化することを特徴とする。
また、請求項9の発明にあっては、メダル通過中に、立上がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立上がり判定処理と、メダル通過中に、立下がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立下がり判定処理と、を別個に行うことを特徴とする。
また、請求項10の発明にあっては、メダル通過時の加速度を加味してメダル通過時間を複数の区間に分けることを特徴とする。
また、請求項11の発明にあっては、所定の基準周波数で自律的に発振すると共に、磁気ヘッドに設けられる検出コイルのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路を用い、前記発振回路から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルの凹凸パターンを検出することを特徴とする。
また、請求項12の発明にあっては、前記発振回路から出力される発振波の位相ズレ測定にもとづいて、メダルの凹凸パターンを検出するにあたり、前記発振回路から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定することを特徴とする。
また、請求項13の発明にあっては、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルであって、前記メダル表面及び/又はメダル裏面の半径方向に複数の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述し、前記識別コードの記述に際しては、立上がり方向の段差と、立下がり方向の段差を区別しないことを特徴とする。
【発明の効果】
【0010】
請求項1の発明とすることにより、メダル表面及び/又はメダル裏面の半径方向にn個の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間の個数が10個である場合、識別コードの種類は、210=1024となり、区間の個数が14個である場合、識別コードの種類は、214=16384となる。しかも、コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しないので、同心円からなる凹パターンや凸パターンの数を抑えつつ、多くの識別コードを記述することができる。例えば、区間の個数が10個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で5個であり、また、区間の個数が14個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で7個である。したがって、凹凸パターンの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。また、区間と言う余裕幅をもって段差検出波形の有無を判断できるので、メダルの通過速度が変動したり、メダルに多少の揺れや跳ねが生じても、各区間における段差検出波形の有無を正確に判断してコード化することができる。
また、請求項2の発明とすることにより、メダル毎に通過速度が相違しても、メダル通過時間から各区間を正確に区分けし、各区間における段差検出波形の有無を誤り無く判断することができる。しかも、上記の一連の処理は、全てマイコンなどでデジタル処理することができるので、検出回路の簡略化やコストダウンが図れる。
また、請求項3の発明とすることにより、凹凸パターンの段差検出波形を判定して判定時の時間を記憶する処理が、二つの判定処理手段の間で交互に行われることになるので、全ての処理を一つの判定処理手段で行う場合に比べ、処理時間に余裕ができ、その結果、通過速度が速いメダルの識別も可能になる。
また、請求項4の発明とすることにより、メダル通過時の加速度に拘わらず、メダル通過時間から各区間を正確に区分けし、各区間における段差検出波形の有無を誤り無く判断することができる。
また、請求項5の発明とすることにより、コンパレータやA/D変換回路を介することなく、発振回路の発振波をマイコンなどに取り込み、デジタル処理(周波数測定、周期測定及び/又は位相ズレ測定)でメダルの凹凸パターンを検出することができるので、コンパレータやA/D変換回路の性能に影響を受けることなく、メダルの凹凸パターンを高精度に検出できる。
また、請求項6の発明とすることにより、発振波の位相ズレが発振波の数だけ蓄積されるので、蓄積された位相ズレにもとづいて、メダルの凹凸パターンを高精度に検出できる。しかも、その分解能は、時間測定用のカウンタ速度により決まり、発振回路の基準周波数に依存しないので、検出対象に応じて発振回路の基準周波数を最適化しつつ、高分解能の検出を行うことができる。
また、請求項7の発明とすることにより、メダル表面及び/又はメダル裏面の半径方向にn個の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間の個数が10個である場合、識別コードの種類は、210=1024となり、区間の個数が14個である場合、識別コードの種類は、214=16384となる。しかも、コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しないので、同心円からなる凹パターンや凸パターンの数を抑えつつ、多くの識別コードを記述することができる。例えば、区間の個数が10個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で5個であり、また、区間の個数が14個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で7個である。したがって、凹凸パターンの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。また、区間と言う余裕幅をもって段差検出波形の有無を判断できるので、メダルの通過速度が変動したり、メダルに多少の揺れや跳ねが生じても、各区間における段差検出波形の有無を正確に判断してコード化することができる。
また、請求項8の発明とすることにより、メダル毎に通過速度が相違しても、メダル通過時間から各区間を正確に区分けし、各区間における段差検出波形の有無を誤り無く判断することができる。しかも、上記の一連の処理は、全てマイコンなどでデジタル処理することができるので、検出回路の簡略化やコストダウンが図れる。
また、請求項9の発明とすることにより、凹凸パターンの段差検出波形を判定して判定時の時間を記憶する処理が、二つの判定処理手段の間で交互に行われることになるので、全ての処理を一つの判定処理手段で行う場合に比べ、処理時間に余裕ができ、その結果、通過速度が速いメダルの識別も可能になる。
また、請求項10の発明とすることにより、メダル通過時の加速度に拘わらず、メダル通過時間から各区間を正確に区分けし、各区間における段差検出波形の有無を誤り無く判断することができる。
また、請求項11の発明とすることにより、コンパレータやA/D変換回路を介することなく、発振回路の発振波をマイコンなどに取り込み、デジタル処理(周波数測定、周期測定及び/又は位相ズレ測定)でメダルの凹凸パターンを検出することができるので、コンパレータやA/D変換回路の性能に影響を受けることなく、メダルの凹凸パターンを高精度に検出できる。
また、請求項12の発明とすることにより、発振波の位相ズレが発振波の数だけ蓄積されるので、蓄積された位相ズレにもとづいて、メダルの凹凸パターンを高精度に検出できる。しかも、その分解能は、時間測定用のカウンタ速度により決まり、発振回路の基準周波数に依存しないので、検出対象に応じて発振回路の基準周波数を最適化しつつ、高分解能の検出を行うことができる。
また、請求項13の発明とすることにより、メダル表面及び/又はメダル裏面の半径方向にn個の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間の個数が10個である場合、識別コードの種類は、210=1024となり、区間の個数が14個である場合、識別コードの種類は、214=16384となる。しかも、識別コードの記述に際しては、立上がり方向の段差と、立下がり方向の段差とを区別しないので、同心円からなる凹パターンや凸パターンの数を抑えつつ、多くの識別コードを記述することができる。例えば、区間の個数が10個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で5個であり、また、区間の個数が14個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で7個である。したがって、凹凸パターンの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に係るメダル識別装置の構成を示すブロック図である。
【図2】(A)は、磁気ヘッドの平面図、(B)は、磁気ヘッドの正面図、(C)は、磁気ヘッドの側面図である。
【図3】磁気ヘッドのX−X断面図である。
【図4】発振波の位相ズレ蓄積作用(検出波形始端部を拡大)を示す説明図である。
【図5】発振波の位相ズレ蓄積作用(検出波形終端部を拡大)を示す説明図である。
【図6】検出回路の凹凸パターン検出処理手順を示すフローチャートである。
【図7】(A)は、メダルの平面図、(B)は、メダルの側面図である。
【図8】検出回路の識別コード読み取り処理を説明するための波形図である。
【図9】検出回路の識別コード読み取り処理手順を示すフローチャートである。
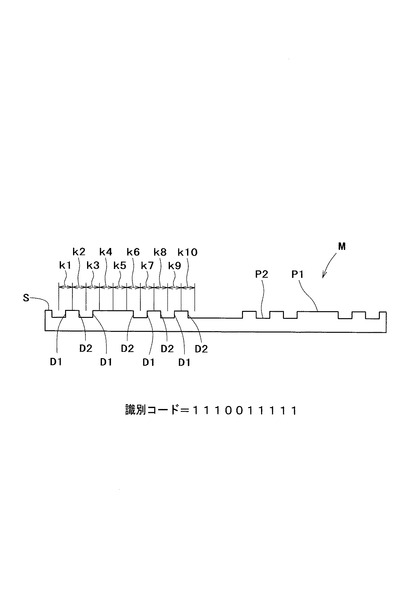
【図10】識別コード「1110011111」が記述されたメダルの断面図である。
【図11】識別コード「0011001100」が記述されたメダルの断面図である。
【発明を実施するための形態】
【0012】
次に、本発明の実施形態について、図面に基づいて説明する。
【0013】
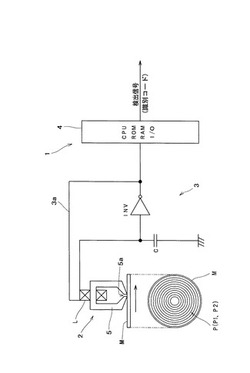
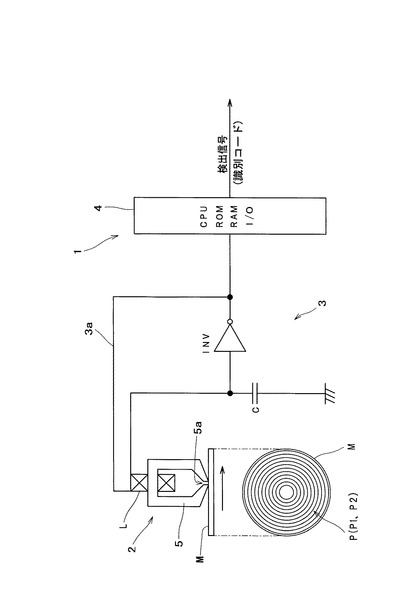
図1は、本発明の実施形態に係るメダル識別装置の構成を示すブロック図である。この図に示されるメダル識別装置1は、同心円の凹凸パターンP(凹パターンP1、凸パターンP2)で識別コードが記述されたメダルMを識別するためのものであって、磁気ヘッド2、発振回路3及び検出回路4を備えて構成されている。
【0014】
磁気ヘッド2は、メダルMの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンPを磁気的に検出する。磁気ヘッド2には、メダルMの凹凸パターンPをインダクタンスの変化として検出する検出コイルLが設けられている。この検出コイルLは、ギャップ部5aを存してループ状の磁路を形成するコア5に巻装されており、発振回路3の発振駆動に応じて、メダルMのギャップ部近接領域を集中的に励磁し、該領域の磁気的な特性(メダルMとの近接距離)をインダクタンスの変化として検出するようになっている。尚、コア5は、パーマロイ、センダスト、フェライト、アモルファスなどの高透磁率材料を用いて形成されるものであり、本実施形態では、C型のものを用いているが、ギャップ部5aを存してループ状の磁路を形成するものであれば、形状に制限はない。
【0015】
発振回路3は、検出コイルLのインダクタンス変化に応じて発振波に位相ズレが生じるように構成される。例えば、シュミット発振回路の帰還回路3aに検出コイルLを配置すれば、検出コイルLのインダクタンス変化に応じて発振波に位相ズレが生じる発振回路3を構成することができる。
【0016】
シュミット発振回路は、シュミットインバータ、シュミットNANDゲートなどが備えるシュミットトリガ回路のヒステリシス特性を利用した発振回路であり、例えば、シュミットインバータINVと、シュミットインバータINVの入力側に接続されるコンデンサCと、シュミットインバータINVの出力をシュミットインバータINVの入力側に帰還させる帰還回路3aと、この帰還回路3aに介在する抵抗要素とを備えて構成されている。
【0017】
初期状態のシュミット発振回路では、コンデンサCに電荷が溜まっていないため、コンデンサCの両端の電圧は0Vとなっている。このとき、シュミットインバータINVは、入力側電圧VinがVL以下なので、出力がHレベル(5V)となる。シュミットインバータINVの出力側電圧Voutが5Vのときは、帰還回路3aを介してシュミットインバータINVの入力側に電流が流れるので、コンデンサCに電荷が徐々に溜まり、その両端の電圧が上昇する。そして、シュミットインバータINVの入力側電圧VinがVHに達すると、シュミットインバータINVの出力がLレベル(0V)に切換わる。シュミットインバータINVの出力側電圧Voutが0Vになると、コンデンサCが放電し、シュミットインバータINVの入力側電圧Vinが徐々に降下する。そして、シュミットインバータINVの入力側電圧VinがVLまで降下すると、シュミットインバータINVの出力がHレベルに切換わる。
【0018】
以上の動作の繰り返しにより、シュミットインバータINVの出力側から所定周波数の矩形波が得られる。そして、シュミット発振回路の発振周波数f(=1/T)は、蓄電期間THと放電期間TLにより決まり、蓄電期間THと放電期間TLは、コンデンサC及び抵抗要素の定数により決まる。したがって、抵抗要素として帰還回路3aに検出コイルLを配置すれば、検出コイルLのインダクタンス変化に応じてシュミット発振回路の発振波に位相ズレを生じさせることができる。
【0019】
なお、本発明の発振回路がシュミット発振回路に限定されないことは勿論であり、検出コイルLのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路であれば、CR発振回路、LC発振回路、水晶発振回路などを用いてもよい。
【0020】
検出回路4は、例えば、CPU、ROM、RAM、I/Oなどが内蔵された1チップマイコンを用いて構成され、ROMに書き込まれたプログラムに従い、後述する凹凸パターン検出処理や識別コード読み取り処理を行う。
【0021】
検出回路4は、発振回路3から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルMの凹凸パターンPを検出する。このようにすると、コンパレータやA/D変換回路を介することなく、発振回路3の発振波をマイコンなどに取り込み、デジタル処理(周波数測定、周期測定及び/又は位相ズレ測定)でメダルMの凹凸パターンPを検出することができるので、コンパレータやA/D変換回路の性能に影響を受けることなく、メダルMの凹凸パターンPを高精度に検出できる。
【0022】
また、本実施形態の検出回路4は、発振回路3から出力される発振波の位相ズレ測定にもとづいて、メダルMの凹凸パターンPを検出するにあたり、発振波の位相ズレを蓄積させて測定するように構成される。具体的には、発振回路3から出力される発振波の数をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定するようになっている。
【0023】
このようにすると、蓄積された位相ズレにもとづいて、メダルMの凹凸パターンPを高精度に検出できる。しかも、その分解能は、時間測定用のカウンタ速度により決まり、発振回路3の基準周波数に依存しないので、検出対象に応じて発振回路3の基準周波数を最適化しつつ、高分解能の検出を行うことができる。
【0024】
図2の(A)は、磁気ヘッドの平面図、(B)は、磁気ヘッドの正面図、(C)は、磁気ヘッドの側面図、図3は、磁気ヘッドのX−X断面図である。これらの図に示すように、磁気ヘッド2は、コア5及び検出コイルLを収容した金属ケース(磁気シールドケース)6内に、絶縁性樹脂材からなる封止材7を充填し、該封止材7を適宜の方法で硬化させることにより構成されるものであるが、本実施形態の磁気ヘッド2においては、金属ケース6内に発振回路3や検出回路4も収容している。
【0025】
このようにすると、ノイズの影響を抑制し、検出精度をさらに向上させることができる。つまり、メダルMの凹凸パターンPに応じた発振波の位相ズレを、発振波の数だけ蓄積して検出する場合、発振波の位相ズレに含まれる誤差成分も蓄積されてしまうことになるが、発振回路3や検出回路4を金属ケース6内に収容することにより、外乱磁界によるSN比の低下を抑制でき、その結果、蓄積される誤差成分を減らし、検出精度を向上させることができる。
【0026】
また、金属ケース6内に収容した発振回路3や検出回路4は、検出コイルLと共に封止材7で封止することが好ましい。その理由は、発振回路3や検出回路4の振動などに起因するSN比の低下を抑制し、検出精度をさらに向上させることができるからである。
【0027】
また、発振回路3及び検出回路4を金属ケース6内に収容する場合は、発振回路3及び検出回路4を同一の基板8上に構成することが好ましい。例えば、基板8の一方の面に発振回路3を実装し、基板8の他方の面に検出回路4を実装する。このようにすると、発振回路3及び検出回路4を金属ケース6内にコンパクトに収容できるだけでなく、金属ケース6に対する発振回路3及び検出回路4の組込み作業を簡略化することができる。
【0028】
次に、発振波の位相ズレ蓄積作用について、図4及び図5を参照して説明する。
【0029】
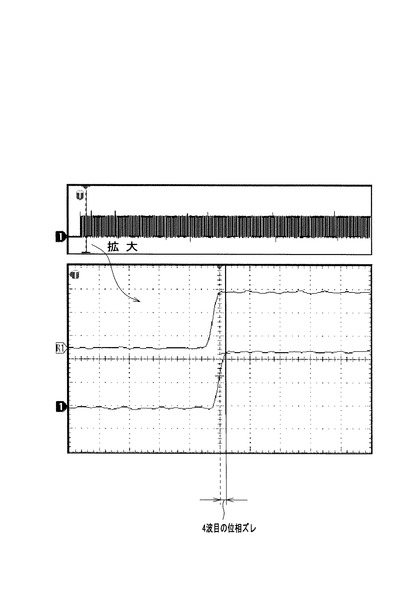
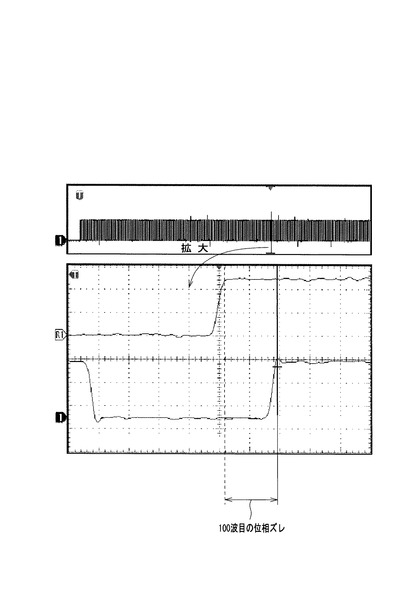
図4は、発振波の位相ズレ蓄積作用(検出波形始端部を拡大)を示す説明図、図5は、発振波の位相ズレ蓄積作用(検出波形終端部を拡大)を示す説明図である。これらの図に示す波形は、一回の検出処理における発振回路3の出力波形であって、発振回路3から出力される発振波の数をカウントし、カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定するにあたり、発振波カウント処理における発振波のカウント数Nを100とした場合の波形であり、上側の波形は、磁気ヘッド2とメダルMとの距離が大きい場合を示し、下側の波形は、磁気ヘッド2とメダルMとの距離が小さい場合を示している。これらの図から明らかなように、検出波形の始端部、つまり発振波カウント処理における発振波のカウント数Nが少ない段階では、位相ズレがあまり蓄積されていないため、その差が明確ではないが(図4参照)、カウント数Nが多くなると、発振波の位相ズレが蓄積され、その差が明確になるので、位相ズレの測定が容易になることがわかる(図5参照)。
【0030】
尚、カウント数Nは、使用条件に応じて適宜変更し、測定精度や応答性能を調整することができる。例えば、測定精度を優先する場合は、一回の検出処理におけるカウント数Nを増やし、また、応答性能を優先する場合は、一回の検出処理におけるカウント数Nを減らすようにする。
【0031】
次に、検出回路4の具体的な凹凸パターン検出処理手順について、図6を参照して説明する。
【0032】
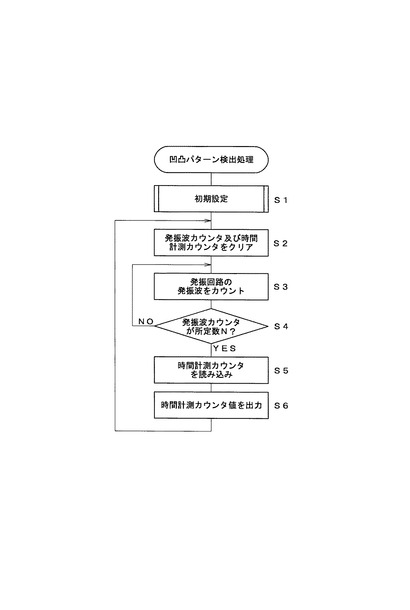
図6は、検出回路の凹凸パターン検出処理手順を示すフローチャートである。この図に示すように、検出回路4の凹凸パターン検出処理では、まず、初期設定を行った後(S1)、カウンタクリア処理(S2)と、発振波カウント処理(S3、S4)と、検出信号出力処理(S5、S6)とからなる一連の処理を繰り返し実行する。
【0033】
カウンタクリア処理は、発振波カウンタ及び時間計測カウンタをクリアする処理である(S2)。
発振波カウント処理は、発振回路3から出力される発振波の数をカウントし(S3)、該カウント数が所定数Nに達したか否かを判断する処理である(S4)。
検出信号出力処理は、発振波のカウント数がNになったら、時間計測カウンタ値を読み込むと共に(S5)、読み込んだ時間計測カウンタ値を出力する処理である(S6)。
【0034】
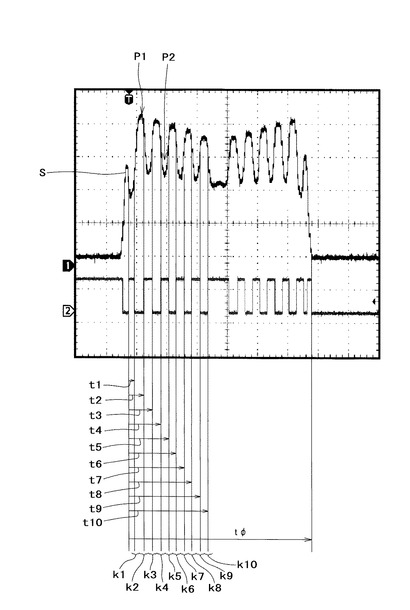
このような凹凸パターン検出処理によれば、例えば、図7に示すメダルMの凹凸パターンPを図8の上側に示すような波形として検出することができ、さらに、この検出波形をデジタル処理することにより、図8の下側に示すような方形波が得られる。この方形波は、凹凸パターンPの段差検出波形dを明確化したものであり、凹凸パターンPの段差位置を高精度に判定することが可能になる。
【0035】
次に、検出回路4の識別コード読み取り処理について、図7及び図8を参照して説明する。
【0036】
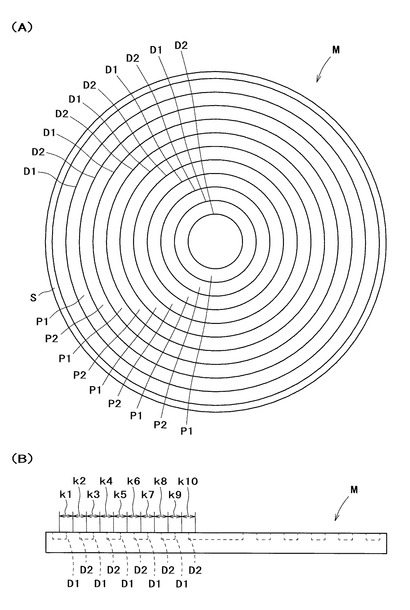
図7の(A)は、メダルの平面図、(B)は、メダルの側面図、図8は、検出回路の識別コード読み取り処理を説明するための波形図である。これらの図に示すように、検出回路4の識別コード読み取り処理は、磁気ヘッド2の検出波形を複数の区間k1〜k10に分け、各区間k1〜k10に、凹凸パターンPの段差検出波形dが存在するか否かを判断すると共に、各区間k1〜k10における段差検出波形dの有無をコード化する処理であって、前記コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないようにしてある。
【0037】
このようにすると、メダル表面及び/又はメダル裏面の半径方向にn個の区間k1〜knを設定し、各区間k1〜knに、凹凸パターンPの段差Dを形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間kの個数が10個である場合、識別コードの種類は、210=1024となり、区間kの個数が14個である場合、識別コードの種類は、214=16384となる。
【0038】
しかも、コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないので、同心円からなる凹パターンP1や凸パターンP2の数を抑えつつ、多くの識別コードを記述することができる。例えば、区間kの個数が10個の場合でも、同心円からなる凹パターンP1や凸パターンP2の数は、それぞれ最大で5個であり、また、区間kの個数が14個の場合でも、同心円からなる凹パターンP1や凸パターンP2の数は、それぞれ最大で7個である。したがって、凹凸パターンPの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。
【0039】
また、検出回路4は、区間kと言う余裕幅をもって段差検出波形dの有無を判断できるので、メダルMの通過速度が変動したり、メダルMに多少の揺れや跳ねが生じても、各区間kにおける段差検出波形dの有無を正確に判断してコード化することができる。
【0040】
また、検出回路4は、メダル通過中に、メダル通過時間tφを計測すると共に、凹凸パターンPの段差検出波形dを判定して、当該判定時の時間t1〜tnを順次記憶し、メダル通過後に、メダル通過時間tφを複数の区間kに分け、各区間kにおける段差検出波形dの有無を前記記憶時間t1〜tnにもとづいて判断してコード化する。このようにすると、メダル毎に通過速度が相違しても、メダル通過時間tφから各区間kを正確に区分けし、各区間kにおける段差検出波形dの有無を誤り無く判断することができる。しかも、上記の一連の処理は、全てマイコンなどでデジタル処理することができるので、検出回路4の簡略化やコストダウンが図れる。
【0041】
また、検出回路4は、メダル通過中に、立上がり方向の段差検出波形d1を判定して、当該判定時の時間t1〜tnを順次記憶する立上がり判定処理手段と、メダル通過中に、立下がり方向の段差検出波形d2を判定して、当該判定時の時間t1〜tnを順次記憶する立下がり判定処理手段と、を別個に備えることが好ましい。このようにすると、凹凸パターンPの段差検出波形dを判定して判定時の時間t1〜tnを記憶する処理が、二つの判定処理手段の間で交互に行われることになるので、全ての処理を一つの判定処理手段で行う場合に比べ、処理時間に余裕ができ、その結果、通過速度が速いメダルMの識別も可能になる。
【0042】
また、検出回路4は、メダル通過時の加速度を加味してメダル通過時間tφを複数の区間kに分けることができる。例えば、各区間kの幅を、加速度に応じて徐々に狭くなるように区分する。このようにすると、メダル通過時の加速度に拘わらず、メダル通過時間tφから各区間kを正確に区分けし、各区間kにおける段差検出波形dの有無を誤り無く判断することができる。
【0043】
メダル通過時の加速度を加味してメダル通過時間tφを複数の区間kに分けるにあたり、メダル通過時の加速度は、実際に検出してもよいが、メダル通過速度から推定したり、一定値(調整可)を用いることが好ましい。このようにすると、加速度を検出するためのセンサが不要になるので、コストダウンが図れる。
【0044】
次に、検出回路4の具体的な識別コード読み取り処理手順について、図9を参照して説明する。ただし、図7に示すように、対象となるメダルMには、識別コードを記述する凹凸パターンPの外側に、同心円の凸パターンからなるスタートマークSが形成されているものとする。
【0045】
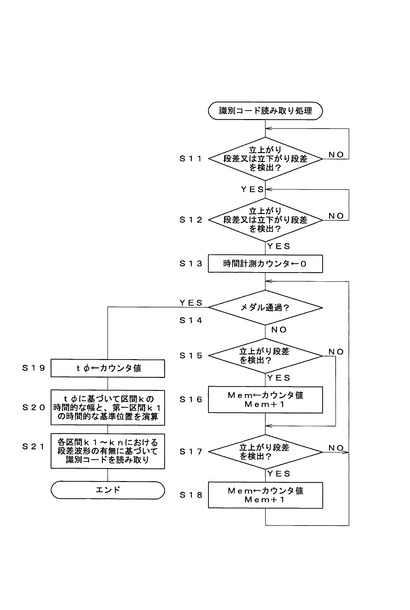
図9は、検出回路の識別コード読み取り処理手順を示すフローチャートである。この図に示すように、検出回路4の識別コード読み取り処理では、まず、スタートマークSの検出処理を行う。この検出処理は、凹凸パターン検出波形(図7の下側)において、スタートマークSを検出する処理であり、例えば、凹凸パターン検出波形の立上がり及び立下がりを判断する処理(S11、S12)を2回連続して行うことによりスタートマークSを検出することができる。
【0046】
スタートマークSを検出したら、時間計測用のカウンタに「0」をセットして計時を開始すると共に(S13)、メダルMの通過を判断しつつ(S14)、立上がり判定処理(S15、S16:立上がり判定処理手段)と立下がり判定処理(S17、S18:立下がり判定処理手段)を別個に繰り返し行う。立上がり判定処理は、凹凸パターン検出波形において、立上がり方向の段差検出波形d1を判定すると共に、当該判定時の時間t1〜tnを順次記憶する処理であり、具体的には、立上がり方向の段差検出波形d1を判定したとき、時間計測用のカウンタ値を記憶領域Memにセットすると共に、記憶領域Memをシフトさせる。また、立下がり判定処理は、凹凸パターン検出波形において、立下がり方向の段差検出波形d2を判定すると共に、当該判定時の時間t1〜tnを順次記憶する処理であり、具体的には、立下がり方向の段差検出波形d2を判定したとき、時間計測用のカウンタ値を記憶領域Memにセットすると共に、記憶領域Memをシフトさせる。
【0047】
メダルMが通過したら、メダル通過時間tφ(通過時のカウンタ値)を記憶すると共に(S19)、区間kの時間的な幅や、スタートマークSに対する第一区間k1の時間的な基準位置(区間中心位置)を、メダル通過時間tφに基づいて算出する(S20)。例えば、図7に示す例では、区間kの時間的な幅や、スタートマークSに対する第一区間k1の時間的な基準位置を下記の式で求める。
区間kの時間的な幅=tφ/24
第一区間k1の時間的な基準位置=tφ/29
【0048】
次に、各区間k1〜knにおける段差検出波形dの有無を前記記憶時間t1〜tnにもとづいて判断してコード化する(S21)。その際、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないこととする。例えば、図8に示す例では、全ての区間k1〜k10に段差検出波形dが存在するので、読み取りコードは、2進数表示で「1111111111」、10進数表示で「1023」となる。
【0049】
次に、メダルMに対する識別コードの具体的な記述方法について、図10及び図11を参照して説明する。
【0050】
本発明のメダルMは、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンPで識別コードを記述するにあたり、メダル表面及び/又はメダル裏面の半径方向に複数の区間k1〜knを設定し、各区間k1〜knに、凹凸パターンPの段差Dを形成するか否かにもとづいて、識別コードが記述される。そして、識別コードの記述に際しては、立上がり方向の段差D1と、立下がり方向の段差D2を区別しないようにしてある。以下、具体例を示す。
【0051】
図10は、識別コード「1110011111」が記述されたメダルの断面図である。この図に示すように、メダルMの表面に、10ビットからなる識別コード「1110011111」を記述する場合は、メダル表面の半径方向に10個区間k0〜k10を設定する。識別コードの1ビット目は「1」であるため、まず、スタートマークSに隣接する第一区間k1の中心位置に段差Dを形成する。ここで、外周側から数えて最初の段差Dは、常に立上がり方向の段差D1である。
【0052】
識別コードの2ビット目も「1」であるため、第二区間k2の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第一区間k1に形成された立上がり方向の段差D1であるため、第一区間k2には、立下がり方向の段差D2を形成する。つまり、段差Dの形成方向は交互に切り換える。
【0053】
識別コードの3ビット目も「1」であるため、第三区間k3の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第二区間k2に形成される立下がり方向の段差D2であるため、第三区間k3には、立上がり方向の段差D1を形成する。
【0054】
識別コードの4ビット目は「0」であるため、第四区間k4には段差Dを形成しない。また、識別コードの5ビット目も「0」であるため、第五区間k5にも段差Dを形成しない。
【0055】
識別コードの6ビット目は「1」であるため、第六区間k6の中心位置に段差Dを形成する。ここで、外周側に隣接する段差Dは、第三区間k3に形成された立上がり方向の段差D1であるため、第六区間k6には、立下がり方向の段差D2を形成する。
【0056】
識別コードの7ビット目も「1」であるため、第七区間k7の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第六区間k6に形成された立下がり方向の段差D2であるため、第七区間k7には、立上がり方向の段差D1を形成する。
【0057】
識別コードの8ビット目も「1」であるため、第八区間k8の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第七区間k7に形成された立上がり方向の段差D1であるため、第八区間k8には、立下がり方向の段差D2を形成する。
【0058】
識別コードの9ビット目も「1」であるため、第九区間k9の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第八区間k8に形成された立下がり方向の段差D2であるため、第九区間k9には、立上がり方向の段差D1を形成する。
【0059】
識別コードの10ビット目も「1」であるため、第十区間k10の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第九区間k9に形成された立上がり方向の段差D1であるため、第十区間k10には、立下がり方向の段差D2を形成する。
【0060】
図11は、識別コード「0011001100」が記述されたメダルの断面図である。この図に示すように、メダルMの表面に、10ビットからなる識別コード「0011001100」を記述する場合は、メダル表面の半径方向に10個区間k0〜k10を設定する。識別コードの1ビット目は「0」であるため、スタートマークSに隣接する第一区間k1には段差Dを形成しない。また、識別コードの2ビット目も「0」であるため、第二区間k2にも段差Dを形成しない。
【0061】
識別コードの3ビット目は「1」であるため、第三区間k3の中心位置に段差Dを形成する。ここで、外周側からみて最初の段差Dとなるため、第三区間k3には、立上がり方向の段差D1を形成する。
【0062】
識別コードの4ビット目も「1」であるため、第四区間k4の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第三区間k3に形成された立上がり方向の段差D1であるため、第四区間k4には、立下がり方向の段差D2を形成する。
【0063】
識別コードの5ビット目は「0」であるため、第五区間k5には段差Dを形成しない。また、識別コードの6ビット目も「0」であるため、第六区間k6にも段差Dを形成しない。
【0064】
識別コードの7ビット目は「1」であるため、第七区間k7の中心位置には段差Dを形成する。ここで、外周側に隣接する段差Dは、第四区間k4に形成された立下がり方向の段差D2であるため、第七区間k7には、立上がり方向の段差D1を形成する。
【0065】
識別コードの8ビット目も「1」であるため、第八区間k8の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第七区間k7に形成された立上がり方向の段差D1であるため、第八区間k8には、立下がり方向の段差D2を形成する。
【0066】
識別コードの9ビット目は「0」であるため、第九区間k9には段差Dを形成しない。また、識別コードの10ビット目も「0」であるため、第十区間k10にも段差Dを形成しない。
【0067】
叙述の如く構成された本実施形態によれば、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンPで識別コードが記述されたメダルMの識別装置であって、メダルMの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出する磁気ヘッド2と、磁気ヘッド2の検出波形を複数の区間k1〜knに分け、各区間k1〜knに、凹凸パターンPの段差検出波形dが存在するか否かを判断すると共に、各区間k1〜knにおける段差検出波形dの有無をコード化する検出回路4と、を備え、コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないので、メダル表面及び/又はメダル裏面の半径方向にn個の区間k1〜knを設定し、各区間k1〜knに、凹凸パターンPの段差Dを形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間k1〜knの個数が10個である場合、識別コードの種類は、210=1024となり、区間k1〜knの個数が14個である場合、識別コードの種類は、214=16384となる。
【0068】
しかも、コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないので、同心円からなる凹パターンP1や凸パターンP2の数を抑えつつ、多くの識別コードを記述することができる。例えば、区間k1〜knの個数が10個の場合でも、同心円からなる凹パターンP1や凸パターンP2の数は、それぞれ最大で5個であり、また、区間k1〜knの個数が14個の場合でも、同心円からなる凹パターンP1や凸パターンP2の数は、それぞれ最大で7個である。したがって、凹凸パターンPの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。
【0069】
また、区間kと言う余裕幅をもって段差検出波形dの有無を判断できるので、メダルMの通過速度が変動したり、メダルMに多少の揺れや跳ねが生じても、各区間kにおける段差検出波形dの有無を正確に判断してコード化することができる。
【0070】
また、検出回路4は、メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンPの段差検出波形dを判定して、当該判定時の時間を順次記憶し、メダル通過後に、メダル通過時間を複数の区間k1〜knに分け、各区間k1〜knにおける段差検出波形dの有無を前記記憶時間にもとづいて判断してコード化するので、メダル毎に通過速度が相違しても、メダル通過時間から各区間k1〜knを正確に区分けし、各区間k1〜knにおける段差検出波形dの有無を誤り無く判断することができる。しかも、上記の一連の処理は、全てマイコンなどでデジタル処理することができるので、検出回路4の簡略化やコストダウンが図れる。
【0071】
また、検出回路4は、メダル通過中に、立上がり方向の段差検出波形d1を判定して、当該判定時の時間を順次記憶する立上がり判定処理手段と、メダル通過中に、立下がり方向の段差検出波形d2を判定して、当該判定時の時間を順次記憶する立下がり判定処理手段と、を別個に備えるので、凹凸パターンPの段差検出波形dを判定して判定時の時間を記憶する処理が、二つの判定処理手段の間で交互に行われることになり、その結果、全ての処理を一つの判定処理手段で行う場合に比べ、処理時間に余裕ができ、通過速度が速いメダルMの識別も可能になる。
【0072】
また、検出回路4は、メダル通過時の加速度を加味してメダル通過時間を複数の区間k1〜knに分けることも可能である。このようにすると、メダル通過時の加速度に拘わらず、メダル通過時間から各区間k1〜knを正確に区分けし、各区間k1〜knにおける段差検出波形の有無を誤り無く判断することができる。
【0073】
また、本実施形態のメダル識別装置1は、所定の基準周波数で自律的に発振すると共に、磁気ヘッド2に設けられる検出コイルLのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路3を備え、検出回路4は、発振回路3から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルMの凹凸パターンPを検出するので、コンパレータやA/D変換回路を介することなく、発振回路3の発振波をマイコンなどに取り込み、デジタル処理(周波数測定、周期測定及び/又は位相ズレ測定)でメダルMの凹凸パターンPを検出することができる。これにより、コンパレータやA/D変換回路の性能に影響を受けることなく、メダルMの凹凸パターンPを高精度に検出できる。
【0074】
また、検出回路4は、発振回路3から出力される発振波の位相ズレ測定にもとづいて、メダルMの凹凸パターンPを検出するにあたり、発振回路3から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定するので、発振波の位相ズレを発振波の数だけ蓄積し、蓄積された位相ズレにもとづいて、メダルMの凹凸パターンPを高精度に検出できる。しかも、その分解能は、時間測定用のカウンタ速度により決まり、発振回路3の基準周波数に依存しないので、検出対象に応じて発振回路3の基準周波数を最適化しつつ、高分解能の検出を行うことができる。
【符号の説明】
【0075】
1 メダル識別装置
2 磁気ヘッド
3 発振回路
4 検出回路
D 段差
L 検出コイル
M メダル
P 凹凸パターン
d 段差検出波形
k 区間
【技術分野】
【0001】
本発明は、同心円の凹凸パターンで識別コードが記述されたメダルや、そのメダルを識別するためのメダル識別装置及びメダル識別方法に関する。
【背景技術】
【0002】
スロットマシン、パチスロ、アーケードゲーム機などを設置した遊技場では、遊技媒体として数多くのメダル(コイン)が使用されている。例えば、パチスロに使用されるメダルは、遊技場において所定の貸出単価で貸し出され、同遊技場において所定の交換率で景品に交換可能な擬似硬貨であって、メーカや機種に拘わらず共通で使用できるように、日本国内(沖縄県を除く)において寸法がほぼ統一されている。
【0003】
近年、他店のメダルを使用して遊技したり、他店のメダルを計数機に入れて景品に交換するといった不正行為が増えている。これは、メダル貸出単価の多様化が原因と考えられており、例えば、貸出単価が5円/枚の店で貸し出されたメダルを、貸出単価が20円/枚の店に持ち込んで遊技したり、景品に交換すれば、貸出単価の違いによる差益が生じてしまうからである。
なお、近年では、同一店舗内でメダル貸出単価を多様化するケースもあるが、説明が複雑になるので、同一店舗内であってもメダル貸出単価が異なるエリアは別店舗と見做すことにする。
【0004】
上記のような問題は、各店のメダルに固有の識別コードを付与し、この識別コードをパチスロや計数機において識別することにより解決可能である。そして、このようなメダル識別システムを構築するには、多種の識別コードを記述可能なメダル構造と、それを識別する技術の開発が不可欠である。例えば、近隣エリア(市町村や都道府県内)の遊技場に固有の識別コードを付与するのであれば、100〜1000種類程度の識別コードが必要であり、また、全国の遊技場に固有の識別コードを付与するのであれば、10000種類程度の識別コードが必要と思われる。
【0005】
比較的多くの識別コードを付与可能なメダルとしては、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルが知られている(例えば、特許文献1〜6参照)。同心円の凹凸パターンは、メダルが転がっていても、一意的に検出することができるだけでなく、1回のメダル通過で識別コードを2回読み取ることがことができるので、その一致にもとづいて、読み取りの正誤を判定できるという利点もある。そして、同心円の凹凸パターンを読み取る方法としては、光学的に読み取る方法や、磁気的に読み取る方法が知られている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−139437号公報
【特許文献2】特開平6−253912号公報
【特許文献3】特開平7−182469号公報
【特許文献4】特開2001−178959号公報
【特許文献5】特開2004−280750号公報
【特許文献6】特開2007−4421号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
同心円の凹凸パターンを光学的に読み取る方法によれば、レーザ光などを使用することにより、微細な凹凸パターンを読み取ることが可能であるが、微細な凹凸パターンを読み取るべく光学系を構成すると、装置が複雑になるだけでなく、高価な装置になってしまうという問題がある。また、光学的な読み取り方法では、メダルや光学系に汚れがあると、読み取り精度が著しく低下してしまうため、安定性や信頼性に欠けるという実用上の大きな問題がある。
【0008】
一方、同心円の凹凸パターンを磁気的に読み取る方法によれば、メダルに多少の汚れがあっても、読み取り精度に影響しないため、安定性や信頼性に優れている。しかしながら。磁気的な読み取り方法では、検出波形のシャープさに欠けるため、細かい凹凸パターンの読み取りが難しいという問題がある。例えば、メダルの表面又は裏面に形成された同心円の凹凸パターンを、メダルの表面又は裏面と密着状態又は近接状態で配置される磁気ヘッドで検出する場合、検出可能な凹凸パターンの最小幅寸法は、0.5〜1.0mmが限界であるため、直径が決まったパチスロ用メダルなどのメダルにおいては、記述可能な識別コードの種類に限りがあり、1000種類、10000種類といった多種の識別コードを記述することは困難であった。
【課題を解決するための手段】
【0009】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、請求項1の本発明は、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルの識別装置であって、前記メダルの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出する磁気ヘッドと、前記磁気ヘッドの検出波形を複数の区間に分け、各区間に、凹凸パターンの段差検出波形が存在するか否かを判断すると共に、各区間における段差検出波形の有無をコード化する検出回路と、を備え、前記コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しないことを特徴とする。
また、請求項2の発明にあっては、前記検出回路は、メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンの段差検出波形を判定して、当該判定時の時間を順次記憶し、メダル通過後に、メダル通過時間を複数の区間に分け、各区間における段差検出波形の有無を前記記憶時間にもとづいて判断してコード化することを特徴とする。
また、請求項3の発明にあっては、前記検出回路は、メダル通過中に、立上がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立上がり判定処理手段と、メダル通過中に、立下がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立下がり判定処理手段と、を別個に備えることを特徴とする。
また、請求項4の発明にあっては、前記検出回路は、メダル通過時の加速度を加味してメダル通過時間を複数の区間に分けることを特徴とする。
また、請求項5の発明にあっては、所定の基準周波数で自律的に発振すると共に、磁気ヘッドに設けられる検出コイルのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路を備え、前記検出回路は、前記発振回路から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルの凹凸パターンを検出することを特徴とする。
また、請求項6の発明にあっては、前記検出回路は、前記発振回路から出力される発振波の位相ズレ測定にもとづいて、メダルの凹凸パターンを検出するにあたり、前記発振回路から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定することを特徴とする。
また、請求項7の発明にあっては、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルの識別方法であって、前記メダルの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように磁気ヘッドを配置し、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出し、前記磁気ヘッドの検出波形を複数の区間に分け、各区間に、凹凸パターンの段差検出波形が存在するか否かを判断すると共に、各区間における段差検出波形の有無をコード化し、前記コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しないことを特徴とする。
また、請求項8の発明にあっては、メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンの段差検出波形を判定して、当該判定時の時間を順次記憶し、メダル通過後に、メダル通過時間を複数の区間に分け、各区間における段差検出波形の有無を前記記憶時間にもとづいて判断してコード化することを特徴とする。
また、請求項9の発明にあっては、メダル通過中に、立上がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立上がり判定処理と、メダル通過中に、立下がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立下がり判定処理と、を別個に行うことを特徴とする。
また、請求項10の発明にあっては、メダル通過時の加速度を加味してメダル通過時間を複数の区間に分けることを特徴とする。
また、請求項11の発明にあっては、所定の基準周波数で自律的に発振すると共に、磁気ヘッドに設けられる検出コイルのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路を用い、前記発振回路から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルの凹凸パターンを検出することを特徴とする。
また、請求項12の発明にあっては、前記発振回路から出力される発振波の位相ズレ測定にもとづいて、メダルの凹凸パターンを検出するにあたり、前記発振回路から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定することを特徴とする。
また、請求項13の発明にあっては、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルであって、前記メダル表面及び/又はメダル裏面の半径方向に複数の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述し、前記識別コードの記述に際しては、立上がり方向の段差と、立下がり方向の段差を区別しないことを特徴とする。
【発明の効果】
【0010】
請求項1の発明とすることにより、メダル表面及び/又はメダル裏面の半径方向にn個の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間の個数が10個である場合、識別コードの種類は、210=1024となり、区間の個数が14個である場合、識別コードの種類は、214=16384となる。しかも、コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しないので、同心円からなる凹パターンや凸パターンの数を抑えつつ、多くの識別コードを記述することができる。例えば、区間の個数が10個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で5個であり、また、区間の個数が14個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で7個である。したがって、凹凸パターンの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。また、区間と言う余裕幅をもって段差検出波形の有無を判断できるので、メダルの通過速度が変動したり、メダルに多少の揺れや跳ねが生じても、各区間における段差検出波形の有無を正確に判断してコード化することができる。
また、請求項2の発明とすることにより、メダル毎に通過速度が相違しても、メダル通過時間から各区間を正確に区分けし、各区間における段差検出波形の有無を誤り無く判断することができる。しかも、上記の一連の処理は、全てマイコンなどでデジタル処理することができるので、検出回路の簡略化やコストダウンが図れる。
また、請求項3の発明とすることにより、凹凸パターンの段差検出波形を判定して判定時の時間を記憶する処理が、二つの判定処理手段の間で交互に行われることになるので、全ての処理を一つの判定処理手段で行う場合に比べ、処理時間に余裕ができ、その結果、通過速度が速いメダルの識別も可能になる。
また、請求項4の発明とすることにより、メダル通過時の加速度に拘わらず、メダル通過時間から各区間を正確に区分けし、各区間における段差検出波形の有無を誤り無く判断することができる。
また、請求項5の発明とすることにより、コンパレータやA/D変換回路を介することなく、発振回路の発振波をマイコンなどに取り込み、デジタル処理(周波数測定、周期測定及び/又は位相ズレ測定)でメダルの凹凸パターンを検出することができるので、コンパレータやA/D変換回路の性能に影響を受けることなく、メダルの凹凸パターンを高精度に検出できる。
また、請求項6の発明とすることにより、発振波の位相ズレが発振波の数だけ蓄積されるので、蓄積された位相ズレにもとづいて、メダルの凹凸パターンを高精度に検出できる。しかも、その分解能は、時間測定用のカウンタ速度により決まり、発振回路の基準周波数に依存しないので、検出対象に応じて発振回路の基準周波数を最適化しつつ、高分解能の検出を行うことができる。
また、請求項7の発明とすることにより、メダル表面及び/又はメダル裏面の半径方向にn個の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間の個数が10個である場合、識別コードの種類は、210=1024となり、区間の個数が14個である場合、識別コードの種類は、214=16384となる。しかも、コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しないので、同心円からなる凹パターンや凸パターンの数を抑えつつ、多くの識別コードを記述することができる。例えば、区間の個数が10個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で5個であり、また、区間の個数が14個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で7個である。したがって、凹凸パターンの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。また、区間と言う余裕幅をもって段差検出波形の有無を判断できるので、メダルの通過速度が変動したり、メダルに多少の揺れや跳ねが生じても、各区間における段差検出波形の有無を正確に判断してコード化することができる。
また、請求項8の発明とすることにより、メダル毎に通過速度が相違しても、メダル通過時間から各区間を正確に区分けし、各区間における段差検出波形の有無を誤り無く判断することができる。しかも、上記の一連の処理は、全てマイコンなどでデジタル処理することができるので、検出回路の簡略化やコストダウンが図れる。
また、請求項9の発明とすることにより、凹凸パターンの段差検出波形を判定して判定時の時間を記憶する処理が、二つの判定処理手段の間で交互に行われることになるので、全ての処理を一つの判定処理手段で行う場合に比べ、処理時間に余裕ができ、その結果、通過速度が速いメダルの識別も可能になる。
また、請求項10の発明とすることにより、メダル通過時の加速度に拘わらず、メダル通過時間から各区間を正確に区分けし、各区間における段差検出波形の有無を誤り無く判断することができる。
また、請求項11の発明とすることにより、コンパレータやA/D変換回路を介することなく、発振回路の発振波をマイコンなどに取り込み、デジタル処理(周波数測定、周期測定及び/又は位相ズレ測定)でメダルの凹凸パターンを検出することができるので、コンパレータやA/D変換回路の性能に影響を受けることなく、メダルの凹凸パターンを高精度に検出できる。
また、請求項12の発明とすることにより、発振波の位相ズレが発振波の数だけ蓄積されるので、蓄積された位相ズレにもとづいて、メダルの凹凸パターンを高精度に検出できる。しかも、その分解能は、時間測定用のカウンタ速度により決まり、発振回路の基準周波数に依存しないので、検出対象に応じて発振回路の基準周波数を最適化しつつ、高分解能の検出を行うことができる。
また、請求項13の発明とすることにより、メダル表面及び/又はメダル裏面の半径方向にn個の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間の個数が10個である場合、識別コードの種類は、210=1024となり、区間の個数が14個である場合、識別コードの種類は、214=16384となる。しかも、識別コードの記述に際しては、立上がり方向の段差と、立下がり方向の段差とを区別しないので、同心円からなる凹パターンや凸パターンの数を抑えつつ、多くの識別コードを記述することができる。例えば、区間の個数が10個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で5個であり、また、区間の個数が14個の場合でも、同心円からなる凹パターンや凸パターンの数は、それぞれ最大で7個である。したがって、凹凸パターンの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に係るメダル識別装置の構成を示すブロック図である。
【図2】(A)は、磁気ヘッドの平面図、(B)は、磁気ヘッドの正面図、(C)は、磁気ヘッドの側面図である。
【図3】磁気ヘッドのX−X断面図である。
【図4】発振波の位相ズレ蓄積作用(検出波形始端部を拡大)を示す説明図である。
【図5】発振波の位相ズレ蓄積作用(検出波形終端部を拡大)を示す説明図である。
【図6】検出回路の凹凸パターン検出処理手順を示すフローチャートである。
【図7】(A)は、メダルの平面図、(B)は、メダルの側面図である。
【図8】検出回路の識別コード読み取り処理を説明するための波形図である。
【図9】検出回路の識別コード読み取り処理手順を示すフローチャートである。
【図10】識別コード「1110011111」が記述されたメダルの断面図である。
【図11】識別コード「0011001100」が記述されたメダルの断面図である。
【発明を実施するための形態】
【0012】
次に、本発明の実施形態について、図面に基づいて説明する。
【0013】
図1は、本発明の実施形態に係るメダル識別装置の構成を示すブロック図である。この図に示されるメダル識別装置1は、同心円の凹凸パターンP(凹パターンP1、凸パターンP2)で識別コードが記述されたメダルMを識別するためのものであって、磁気ヘッド2、発振回路3及び検出回路4を備えて構成されている。
【0014】
磁気ヘッド2は、メダルMの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンPを磁気的に検出する。磁気ヘッド2には、メダルMの凹凸パターンPをインダクタンスの変化として検出する検出コイルLが設けられている。この検出コイルLは、ギャップ部5aを存してループ状の磁路を形成するコア5に巻装されており、発振回路3の発振駆動に応じて、メダルMのギャップ部近接領域を集中的に励磁し、該領域の磁気的な特性(メダルMとの近接距離)をインダクタンスの変化として検出するようになっている。尚、コア5は、パーマロイ、センダスト、フェライト、アモルファスなどの高透磁率材料を用いて形成されるものであり、本実施形態では、C型のものを用いているが、ギャップ部5aを存してループ状の磁路を形成するものであれば、形状に制限はない。
【0015】
発振回路3は、検出コイルLのインダクタンス変化に応じて発振波に位相ズレが生じるように構成される。例えば、シュミット発振回路の帰還回路3aに検出コイルLを配置すれば、検出コイルLのインダクタンス変化に応じて発振波に位相ズレが生じる発振回路3を構成することができる。
【0016】
シュミット発振回路は、シュミットインバータ、シュミットNANDゲートなどが備えるシュミットトリガ回路のヒステリシス特性を利用した発振回路であり、例えば、シュミットインバータINVと、シュミットインバータINVの入力側に接続されるコンデンサCと、シュミットインバータINVの出力をシュミットインバータINVの入力側に帰還させる帰還回路3aと、この帰還回路3aに介在する抵抗要素とを備えて構成されている。
【0017】
初期状態のシュミット発振回路では、コンデンサCに電荷が溜まっていないため、コンデンサCの両端の電圧は0Vとなっている。このとき、シュミットインバータINVは、入力側電圧VinがVL以下なので、出力がHレベル(5V)となる。シュミットインバータINVの出力側電圧Voutが5Vのときは、帰還回路3aを介してシュミットインバータINVの入力側に電流が流れるので、コンデンサCに電荷が徐々に溜まり、その両端の電圧が上昇する。そして、シュミットインバータINVの入力側電圧VinがVHに達すると、シュミットインバータINVの出力がLレベル(0V)に切換わる。シュミットインバータINVの出力側電圧Voutが0Vになると、コンデンサCが放電し、シュミットインバータINVの入力側電圧Vinが徐々に降下する。そして、シュミットインバータINVの入力側電圧VinがVLまで降下すると、シュミットインバータINVの出力がHレベルに切換わる。
【0018】
以上の動作の繰り返しにより、シュミットインバータINVの出力側から所定周波数の矩形波が得られる。そして、シュミット発振回路の発振周波数f(=1/T)は、蓄電期間THと放電期間TLにより決まり、蓄電期間THと放電期間TLは、コンデンサC及び抵抗要素の定数により決まる。したがって、抵抗要素として帰還回路3aに検出コイルLを配置すれば、検出コイルLのインダクタンス変化に応じてシュミット発振回路の発振波に位相ズレを生じさせることができる。
【0019】
なお、本発明の発振回路がシュミット発振回路に限定されないことは勿論であり、検出コイルLのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路であれば、CR発振回路、LC発振回路、水晶発振回路などを用いてもよい。
【0020】
検出回路4は、例えば、CPU、ROM、RAM、I/Oなどが内蔵された1チップマイコンを用いて構成され、ROMに書き込まれたプログラムに従い、後述する凹凸パターン検出処理や識別コード読み取り処理を行う。
【0021】
検出回路4は、発振回路3から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルMの凹凸パターンPを検出する。このようにすると、コンパレータやA/D変換回路を介することなく、発振回路3の発振波をマイコンなどに取り込み、デジタル処理(周波数測定、周期測定及び/又は位相ズレ測定)でメダルMの凹凸パターンPを検出することができるので、コンパレータやA/D変換回路の性能に影響を受けることなく、メダルMの凹凸パターンPを高精度に検出できる。
【0022】
また、本実施形態の検出回路4は、発振回路3から出力される発振波の位相ズレ測定にもとづいて、メダルMの凹凸パターンPを検出するにあたり、発振波の位相ズレを蓄積させて測定するように構成される。具体的には、発振回路3から出力される発振波の数をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定するようになっている。
【0023】
このようにすると、蓄積された位相ズレにもとづいて、メダルMの凹凸パターンPを高精度に検出できる。しかも、その分解能は、時間測定用のカウンタ速度により決まり、発振回路3の基準周波数に依存しないので、検出対象に応じて発振回路3の基準周波数を最適化しつつ、高分解能の検出を行うことができる。
【0024】
図2の(A)は、磁気ヘッドの平面図、(B)は、磁気ヘッドの正面図、(C)は、磁気ヘッドの側面図、図3は、磁気ヘッドのX−X断面図である。これらの図に示すように、磁気ヘッド2は、コア5及び検出コイルLを収容した金属ケース(磁気シールドケース)6内に、絶縁性樹脂材からなる封止材7を充填し、該封止材7を適宜の方法で硬化させることにより構成されるものであるが、本実施形態の磁気ヘッド2においては、金属ケース6内に発振回路3や検出回路4も収容している。
【0025】
このようにすると、ノイズの影響を抑制し、検出精度をさらに向上させることができる。つまり、メダルMの凹凸パターンPに応じた発振波の位相ズレを、発振波の数だけ蓄積して検出する場合、発振波の位相ズレに含まれる誤差成分も蓄積されてしまうことになるが、発振回路3や検出回路4を金属ケース6内に収容することにより、外乱磁界によるSN比の低下を抑制でき、その結果、蓄積される誤差成分を減らし、検出精度を向上させることができる。
【0026】
また、金属ケース6内に収容した発振回路3や検出回路4は、検出コイルLと共に封止材7で封止することが好ましい。その理由は、発振回路3や検出回路4の振動などに起因するSN比の低下を抑制し、検出精度をさらに向上させることができるからである。
【0027】
また、発振回路3及び検出回路4を金属ケース6内に収容する場合は、発振回路3及び検出回路4を同一の基板8上に構成することが好ましい。例えば、基板8の一方の面に発振回路3を実装し、基板8の他方の面に検出回路4を実装する。このようにすると、発振回路3及び検出回路4を金属ケース6内にコンパクトに収容できるだけでなく、金属ケース6に対する発振回路3及び検出回路4の組込み作業を簡略化することができる。
【0028】
次に、発振波の位相ズレ蓄積作用について、図4及び図5を参照して説明する。
【0029】
図4は、発振波の位相ズレ蓄積作用(検出波形始端部を拡大)を示す説明図、図5は、発振波の位相ズレ蓄積作用(検出波形終端部を拡大)を示す説明図である。これらの図に示す波形は、一回の検出処理における発振回路3の出力波形であって、発振回路3から出力される発振波の数をカウントし、カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定するにあたり、発振波カウント処理における発振波のカウント数Nを100とした場合の波形であり、上側の波形は、磁気ヘッド2とメダルMとの距離が大きい場合を示し、下側の波形は、磁気ヘッド2とメダルMとの距離が小さい場合を示している。これらの図から明らかなように、検出波形の始端部、つまり発振波カウント処理における発振波のカウント数Nが少ない段階では、位相ズレがあまり蓄積されていないため、その差が明確ではないが(図4参照)、カウント数Nが多くなると、発振波の位相ズレが蓄積され、その差が明確になるので、位相ズレの測定が容易になることがわかる(図5参照)。
【0030】
尚、カウント数Nは、使用条件に応じて適宜変更し、測定精度や応答性能を調整することができる。例えば、測定精度を優先する場合は、一回の検出処理におけるカウント数Nを増やし、また、応答性能を優先する場合は、一回の検出処理におけるカウント数Nを減らすようにする。
【0031】
次に、検出回路4の具体的な凹凸パターン検出処理手順について、図6を参照して説明する。
【0032】
図6は、検出回路の凹凸パターン検出処理手順を示すフローチャートである。この図に示すように、検出回路4の凹凸パターン検出処理では、まず、初期設定を行った後(S1)、カウンタクリア処理(S2)と、発振波カウント処理(S3、S4)と、検出信号出力処理(S5、S6)とからなる一連の処理を繰り返し実行する。
【0033】
カウンタクリア処理は、発振波カウンタ及び時間計測カウンタをクリアする処理である(S2)。
発振波カウント処理は、発振回路3から出力される発振波の数をカウントし(S3)、該カウント数が所定数Nに達したか否かを判断する処理である(S4)。
検出信号出力処理は、発振波のカウント数がNになったら、時間計測カウンタ値を読み込むと共に(S5)、読み込んだ時間計測カウンタ値を出力する処理である(S6)。
【0034】
このような凹凸パターン検出処理によれば、例えば、図7に示すメダルMの凹凸パターンPを図8の上側に示すような波形として検出することができ、さらに、この検出波形をデジタル処理することにより、図8の下側に示すような方形波が得られる。この方形波は、凹凸パターンPの段差検出波形dを明確化したものであり、凹凸パターンPの段差位置を高精度に判定することが可能になる。
【0035】
次に、検出回路4の識別コード読み取り処理について、図7及び図8を参照して説明する。
【0036】
図7の(A)は、メダルの平面図、(B)は、メダルの側面図、図8は、検出回路の識別コード読み取り処理を説明するための波形図である。これらの図に示すように、検出回路4の識別コード読み取り処理は、磁気ヘッド2の検出波形を複数の区間k1〜k10に分け、各区間k1〜k10に、凹凸パターンPの段差検出波形dが存在するか否かを判断すると共に、各区間k1〜k10における段差検出波形dの有無をコード化する処理であって、前記コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないようにしてある。
【0037】
このようにすると、メダル表面及び/又はメダル裏面の半径方向にn個の区間k1〜knを設定し、各区間k1〜knに、凹凸パターンPの段差Dを形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間kの個数が10個である場合、識別コードの種類は、210=1024となり、区間kの個数が14個である場合、識別コードの種類は、214=16384となる。
【0038】
しかも、コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないので、同心円からなる凹パターンP1や凸パターンP2の数を抑えつつ、多くの識別コードを記述することができる。例えば、区間kの個数が10個の場合でも、同心円からなる凹パターンP1や凸パターンP2の数は、それぞれ最大で5個であり、また、区間kの個数が14個の場合でも、同心円からなる凹パターンP1や凸パターンP2の数は、それぞれ最大で7個である。したがって、凹凸パターンPの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。
【0039】
また、検出回路4は、区間kと言う余裕幅をもって段差検出波形dの有無を判断できるので、メダルMの通過速度が変動したり、メダルMに多少の揺れや跳ねが生じても、各区間kにおける段差検出波形dの有無を正確に判断してコード化することができる。
【0040】
また、検出回路4は、メダル通過中に、メダル通過時間tφを計測すると共に、凹凸パターンPの段差検出波形dを判定して、当該判定時の時間t1〜tnを順次記憶し、メダル通過後に、メダル通過時間tφを複数の区間kに分け、各区間kにおける段差検出波形dの有無を前記記憶時間t1〜tnにもとづいて判断してコード化する。このようにすると、メダル毎に通過速度が相違しても、メダル通過時間tφから各区間kを正確に区分けし、各区間kにおける段差検出波形dの有無を誤り無く判断することができる。しかも、上記の一連の処理は、全てマイコンなどでデジタル処理することができるので、検出回路4の簡略化やコストダウンが図れる。
【0041】
また、検出回路4は、メダル通過中に、立上がり方向の段差検出波形d1を判定して、当該判定時の時間t1〜tnを順次記憶する立上がり判定処理手段と、メダル通過中に、立下がり方向の段差検出波形d2を判定して、当該判定時の時間t1〜tnを順次記憶する立下がり判定処理手段と、を別個に備えることが好ましい。このようにすると、凹凸パターンPの段差検出波形dを判定して判定時の時間t1〜tnを記憶する処理が、二つの判定処理手段の間で交互に行われることになるので、全ての処理を一つの判定処理手段で行う場合に比べ、処理時間に余裕ができ、その結果、通過速度が速いメダルMの識別も可能になる。
【0042】
また、検出回路4は、メダル通過時の加速度を加味してメダル通過時間tφを複数の区間kに分けることができる。例えば、各区間kの幅を、加速度に応じて徐々に狭くなるように区分する。このようにすると、メダル通過時の加速度に拘わらず、メダル通過時間tφから各区間kを正確に区分けし、各区間kにおける段差検出波形dの有無を誤り無く判断することができる。
【0043】
メダル通過時の加速度を加味してメダル通過時間tφを複数の区間kに分けるにあたり、メダル通過時の加速度は、実際に検出してもよいが、メダル通過速度から推定したり、一定値(調整可)を用いることが好ましい。このようにすると、加速度を検出するためのセンサが不要になるので、コストダウンが図れる。
【0044】
次に、検出回路4の具体的な識別コード読み取り処理手順について、図9を参照して説明する。ただし、図7に示すように、対象となるメダルMには、識別コードを記述する凹凸パターンPの外側に、同心円の凸パターンからなるスタートマークSが形成されているものとする。
【0045】
図9は、検出回路の識別コード読み取り処理手順を示すフローチャートである。この図に示すように、検出回路4の識別コード読み取り処理では、まず、スタートマークSの検出処理を行う。この検出処理は、凹凸パターン検出波形(図7の下側)において、スタートマークSを検出する処理であり、例えば、凹凸パターン検出波形の立上がり及び立下がりを判断する処理(S11、S12)を2回連続して行うことによりスタートマークSを検出することができる。
【0046】
スタートマークSを検出したら、時間計測用のカウンタに「0」をセットして計時を開始すると共に(S13)、メダルMの通過を判断しつつ(S14)、立上がり判定処理(S15、S16:立上がり判定処理手段)と立下がり判定処理(S17、S18:立下がり判定処理手段)を別個に繰り返し行う。立上がり判定処理は、凹凸パターン検出波形において、立上がり方向の段差検出波形d1を判定すると共に、当該判定時の時間t1〜tnを順次記憶する処理であり、具体的には、立上がり方向の段差検出波形d1を判定したとき、時間計測用のカウンタ値を記憶領域Memにセットすると共に、記憶領域Memをシフトさせる。また、立下がり判定処理は、凹凸パターン検出波形において、立下がり方向の段差検出波形d2を判定すると共に、当該判定時の時間t1〜tnを順次記憶する処理であり、具体的には、立下がり方向の段差検出波形d2を判定したとき、時間計測用のカウンタ値を記憶領域Memにセットすると共に、記憶領域Memをシフトさせる。
【0047】
メダルMが通過したら、メダル通過時間tφ(通過時のカウンタ値)を記憶すると共に(S19)、区間kの時間的な幅や、スタートマークSに対する第一区間k1の時間的な基準位置(区間中心位置)を、メダル通過時間tφに基づいて算出する(S20)。例えば、図7に示す例では、区間kの時間的な幅や、スタートマークSに対する第一区間k1の時間的な基準位置を下記の式で求める。
区間kの時間的な幅=tφ/24
第一区間k1の時間的な基準位置=tφ/29
【0048】
次に、各区間k1〜knにおける段差検出波形dの有無を前記記憶時間t1〜tnにもとづいて判断してコード化する(S21)。その際、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないこととする。例えば、図8に示す例では、全ての区間k1〜k10に段差検出波形dが存在するので、読み取りコードは、2進数表示で「1111111111」、10進数表示で「1023」となる。
【0049】
次に、メダルMに対する識別コードの具体的な記述方法について、図10及び図11を参照して説明する。
【0050】
本発明のメダルMは、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンPで識別コードを記述するにあたり、メダル表面及び/又はメダル裏面の半径方向に複数の区間k1〜knを設定し、各区間k1〜knに、凹凸パターンPの段差Dを形成するか否かにもとづいて、識別コードが記述される。そして、識別コードの記述に際しては、立上がり方向の段差D1と、立下がり方向の段差D2を区別しないようにしてある。以下、具体例を示す。
【0051】
図10は、識別コード「1110011111」が記述されたメダルの断面図である。この図に示すように、メダルMの表面に、10ビットからなる識別コード「1110011111」を記述する場合は、メダル表面の半径方向に10個区間k0〜k10を設定する。識別コードの1ビット目は「1」であるため、まず、スタートマークSに隣接する第一区間k1の中心位置に段差Dを形成する。ここで、外周側から数えて最初の段差Dは、常に立上がり方向の段差D1である。
【0052】
識別コードの2ビット目も「1」であるため、第二区間k2の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第一区間k1に形成された立上がり方向の段差D1であるため、第一区間k2には、立下がり方向の段差D2を形成する。つまり、段差Dの形成方向は交互に切り換える。
【0053】
識別コードの3ビット目も「1」であるため、第三区間k3の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第二区間k2に形成される立下がり方向の段差D2であるため、第三区間k3には、立上がり方向の段差D1を形成する。
【0054】
識別コードの4ビット目は「0」であるため、第四区間k4には段差Dを形成しない。また、識別コードの5ビット目も「0」であるため、第五区間k5にも段差Dを形成しない。
【0055】
識別コードの6ビット目は「1」であるため、第六区間k6の中心位置に段差Dを形成する。ここで、外周側に隣接する段差Dは、第三区間k3に形成された立上がり方向の段差D1であるため、第六区間k6には、立下がり方向の段差D2を形成する。
【0056】
識別コードの7ビット目も「1」であるため、第七区間k7の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第六区間k6に形成された立下がり方向の段差D2であるため、第七区間k7には、立上がり方向の段差D1を形成する。
【0057】
識別コードの8ビット目も「1」であるため、第八区間k8の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第七区間k7に形成された立上がり方向の段差D1であるため、第八区間k8には、立下がり方向の段差D2を形成する。
【0058】
識別コードの9ビット目も「1」であるため、第九区間k9の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第八区間k8に形成された立下がり方向の段差D2であるため、第九区間k9には、立上がり方向の段差D1を形成する。
【0059】
識別コードの10ビット目も「1」であるため、第十区間k10の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第九区間k9に形成された立上がり方向の段差D1であるため、第十区間k10には、立下がり方向の段差D2を形成する。
【0060】
図11は、識別コード「0011001100」が記述されたメダルの断面図である。この図に示すように、メダルMの表面に、10ビットからなる識別コード「0011001100」を記述する場合は、メダル表面の半径方向に10個区間k0〜k10を設定する。識別コードの1ビット目は「0」であるため、スタートマークSに隣接する第一区間k1には段差Dを形成しない。また、識別コードの2ビット目も「0」であるため、第二区間k2にも段差Dを形成しない。
【0061】
識別コードの3ビット目は「1」であるため、第三区間k3の中心位置に段差Dを形成する。ここで、外周側からみて最初の段差Dとなるため、第三区間k3には、立上がり方向の段差D1を形成する。
【0062】
識別コードの4ビット目も「1」であるため、第四区間k4の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第三区間k3に形成された立上がり方向の段差D1であるため、第四区間k4には、立下がり方向の段差D2を形成する。
【0063】
識別コードの5ビット目は「0」であるため、第五区間k5には段差Dを形成しない。また、識別コードの6ビット目も「0」であるため、第六区間k6にも段差Dを形成しない。
【0064】
識別コードの7ビット目は「1」であるため、第七区間k7の中心位置には段差Dを形成する。ここで、外周側に隣接する段差Dは、第四区間k4に形成された立下がり方向の段差D2であるため、第七区間k7には、立上がり方向の段差D1を形成する。
【0065】
識別コードの8ビット目も「1」であるため、第八区間k8の中心位置にも段差Dを形成する。ここで、外周側に隣接する段差Dは、第七区間k7に形成された立上がり方向の段差D1であるため、第八区間k8には、立下がり方向の段差D2を形成する。
【0066】
識別コードの9ビット目は「0」であるため、第九区間k9には段差Dを形成しない。また、識別コードの10ビット目も「0」であるため、第十区間k10にも段差Dを形成しない。
【0067】
叙述の如く構成された本実施形態によれば、メダル表面及び/又はメダル裏面に、同心円の凹凸パターンPで識別コードが記述されたメダルMの識別装置であって、メダルMの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出する磁気ヘッド2と、磁気ヘッド2の検出波形を複数の区間k1〜knに分け、各区間k1〜knに、凹凸パターンPの段差検出波形dが存在するか否かを判断すると共に、各区間k1〜knにおける段差検出波形dの有無をコード化する検出回路4と、を備え、コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないので、メダル表面及び/又はメダル裏面の半径方向にn個の区間k1〜knを設定し、各区間k1〜knに、凹凸パターンPの段差Dを形成するか否かにもとづいて、識別コードを記述した場合、識別コードの種類は、2nとなる。例えば、区間k1〜knの個数が10個である場合、識別コードの種類は、210=1024となり、区間k1〜knの個数が14個である場合、識別コードの種類は、214=16384となる。
【0068】
しかも、コード化に際しては、立上がり方向の段差検出波形d1と、立下がり方向の段差検出波形d2とを区別しないので、同心円からなる凹パターンP1や凸パターンP2の数を抑えつつ、多くの識別コードを記述することができる。例えば、区間k1〜knの個数が10個の場合でも、同心円からなる凹パターンP1や凸パターンP2の数は、それぞれ最大で5個であり、また、区間k1〜knの個数が14個の場合でも、同心円からなる凹パターンP1や凸パターンP2の数は、それぞれ最大で7個である。したがって、凹凸パターンPの最小幅寸法の限界が、0.5〜1.0mmであったとしても、直径が決まった25mmのパチスロ用メダルにおいて、1000種類、10000種類といった多種の識別コードを記述することが可能となる。
【0069】
また、区間kと言う余裕幅をもって段差検出波形dの有無を判断できるので、メダルMの通過速度が変動したり、メダルMに多少の揺れや跳ねが生じても、各区間kにおける段差検出波形dの有無を正確に判断してコード化することができる。
【0070】
また、検出回路4は、メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンPの段差検出波形dを判定して、当該判定時の時間を順次記憶し、メダル通過後に、メダル通過時間を複数の区間k1〜knに分け、各区間k1〜knにおける段差検出波形dの有無を前記記憶時間にもとづいて判断してコード化するので、メダル毎に通過速度が相違しても、メダル通過時間から各区間k1〜knを正確に区分けし、各区間k1〜knにおける段差検出波形dの有無を誤り無く判断することができる。しかも、上記の一連の処理は、全てマイコンなどでデジタル処理することができるので、検出回路4の簡略化やコストダウンが図れる。
【0071】
また、検出回路4は、メダル通過中に、立上がり方向の段差検出波形d1を判定して、当該判定時の時間を順次記憶する立上がり判定処理手段と、メダル通過中に、立下がり方向の段差検出波形d2を判定して、当該判定時の時間を順次記憶する立下がり判定処理手段と、を別個に備えるので、凹凸パターンPの段差検出波形dを判定して判定時の時間を記憶する処理が、二つの判定処理手段の間で交互に行われることになり、その結果、全ての処理を一つの判定処理手段で行う場合に比べ、処理時間に余裕ができ、通過速度が速いメダルMの識別も可能になる。
【0072】
また、検出回路4は、メダル通過時の加速度を加味してメダル通過時間を複数の区間k1〜knに分けることも可能である。このようにすると、メダル通過時の加速度に拘わらず、メダル通過時間から各区間k1〜knを正確に区分けし、各区間k1〜knにおける段差検出波形の有無を誤り無く判断することができる。
【0073】
また、本実施形態のメダル識別装置1は、所定の基準周波数で自律的に発振すると共に、磁気ヘッド2に設けられる検出コイルLのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路3を備え、検出回路4は、発振回路3から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルMの凹凸パターンPを検出するので、コンパレータやA/D変換回路を介することなく、発振回路3の発振波をマイコンなどに取り込み、デジタル処理(周波数測定、周期測定及び/又は位相ズレ測定)でメダルMの凹凸パターンPを検出することができる。これにより、コンパレータやA/D変換回路の性能に影響を受けることなく、メダルMの凹凸パターンPを高精度に検出できる。
【0074】
また、検出回路4は、発振回路3から出力される発振波の位相ズレ測定にもとづいて、メダルMの凹凸パターンPを検出するにあたり、発振回路3から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定するので、発振波の位相ズレを発振波の数だけ蓄積し、蓄積された位相ズレにもとづいて、メダルMの凹凸パターンPを高精度に検出できる。しかも、その分解能は、時間測定用のカウンタ速度により決まり、発振回路3の基準周波数に依存しないので、検出対象に応じて発振回路3の基準周波数を最適化しつつ、高分解能の検出を行うことができる。
【符号の説明】
【0075】
1 メダル識別装置
2 磁気ヘッド
3 発振回路
4 検出回路
D 段差
L 検出コイル
M メダル
P 凹凸パターン
d 段差検出波形
k 区間
【特許請求の範囲】
【請求項1】
メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルの識別装置であって、
前記メダルの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出する磁気ヘッドと、
前記磁気ヘッドの検出波形を複数の区間に分け、各区間に、凹凸パターンの段差検出波形が存在するか否かを判断すると共に、各区間における段差検出波形の有無をコード化する検出回路と、を備え、
前記コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しない
ことを特徴とするメダル識別装置。
【請求項2】
前記検出回路は、
メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンの段差検出波形を判定して、当該判定時の時間を順次記憶し、
メダル通過後に、メダル通過時間を複数の区間に分け、各区間における段差検出波形の有無を前記記憶時間にもとづいて判断してコード化する
ことを特徴とする請求項1記載のメダル識別装置。
【請求項3】
前記検出回路は、
メダル通過中に、立上がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立上がり判定処理手段と、
メダル通過中に、立下がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立下がり判定処理手段と、を別個に備える
ことを特徴とする請求項2記載のメダル識別装置。
【請求項4】
前記検出回路は、
メダル通過時の加速度を加味してメダル通過時間を複数の区間に分ける
ことを特徴とする請求項2又は3記載のメダル識別装置。
【請求項5】
所定の基準周波数で自律的に発振すると共に、磁気ヘッドに設けられる検出コイルのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路を備え、
前記検出回路は、
前記発振回路から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルの凹凸パターンを検出する
ことを特徴とする請求項1〜4のいずれかに記載のメダル識別装置。
【請求項6】
前記検出回路は、
前記発振回路から出力される発振波の位相ズレ測定にもとづいて、メダルの凹凸パターンを検出するにあたり、
前記発振回路から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定する
ことを特徴とする請求項5記載のメダル識別装置。
【請求項7】
メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルの識別方法であって、
前記メダルの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように磁気ヘッドを配置し、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出し、
前記磁気ヘッドの検出波形を複数の区間に分け、各区間に、凹凸パターンの段差検出波形が存在するか否かを判断すると共に、各区間における段差検出波形の有無をコード化し、
前記コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しない
ことを特徴とするメダル識別方法。
【請求項8】
メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンの段差検出波形を判定して、当該判定時の時間を順次記憶し、
メダル通過後に、メダル通過時間を複数の区間に分け、各区間における段差検出波形の有無を前記記憶時間にもとづいて判断してコード化する
ことを特徴とする請求項7記載のメダル識別方法。
【請求項9】
メダル通過中に、立上がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立上がり判定処理と、
メダル通過中に、立下がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立下がり判定処理と、を別個に行う
ことを特徴とする請求項8記載のメダル識別方法。
【請求項10】
メダル通過時の加速度を加味してメダル通過時間を複数の区間に分ける
ことを特徴とする請求項8又は9記載のメダル識別方法。
【請求項11】
所定の基準周波数で自律的に発振すると共に、磁気ヘッドに設けられる検出コイルのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路を用い、
前記発振回路から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルの凹凸パターンを検出する
ことを特徴とする請求項7〜10のいずれかに記載のメダル識別方法。
【請求項12】
前記発振回路から出力される発振波の位相ズレ測定にもとづいて、メダルの凹凸パターンを検出するにあたり、
前記発振回路から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定する
ことを特徴とする請求項11記載のメダル識別方法。
【請求項13】
メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルであって、
前記メダル表面及び/又はメダル裏面の半径方向に複数の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述し、
前記識別コードの記述に際しては、立上がり方向の段差と、立下がり方向の段差を区別しない
ことを特徴とするメダル。
【請求項1】
メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルの識別装置であって、
前記メダルの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように配置され、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出する磁気ヘッドと、
前記磁気ヘッドの検出波形を複数の区間に分け、各区間に、凹凸パターンの段差検出波形が存在するか否かを判断すると共に、各区間における段差検出波形の有無をコード化する検出回路と、を備え、
前記コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しない
ことを特徴とするメダル識別装置。
【請求項2】
前記検出回路は、
メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンの段差検出波形を判定して、当該判定時の時間を順次記憶し、
メダル通過後に、メダル通過時間を複数の区間に分け、各区間における段差検出波形の有無を前記記憶時間にもとづいて判断してコード化する
ことを特徴とする請求項1記載のメダル識別装置。
【請求項3】
前記検出回路は、
メダル通過中に、立上がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立上がり判定処理手段と、
メダル通過中に、立下がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立下がり判定処理手段と、を別個に備える
ことを特徴とする請求項2記載のメダル識別装置。
【請求項4】
前記検出回路は、
メダル通過時の加速度を加味してメダル通過時間を複数の区間に分ける
ことを特徴とする請求項2又は3記載のメダル識別装置。
【請求項5】
所定の基準周波数で自律的に発振すると共に、磁気ヘッドに設けられる検出コイルのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路を備え、
前記検出回路は、
前記発振回路から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルの凹凸パターンを検出する
ことを特徴とする請求項1〜4のいずれかに記載のメダル識別装置。
【請求項6】
前記検出回路は、
前記発振回路から出力される発振波の位相ズレ測定にもとづいて、メダルの凹凸パターンを検出するにあたり、
前記発振回路から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定する
ことを特徴とする請求項5記載のメダル識別装置。
【請求項7】
メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルの識別方法であって、
前記メダルの通過経路に、通過するメダル表面及び/又はメダル裏面と対向するように磁気ヘッドを配置し、メダル通過時に、メダル表面及び/又はメダル裏面の凹凸パターンを磁気的に検出し、
前記磁気ヘッドの検出波形を複数の区間に分け、各区間に、凹凸パターンの段差検出波形が存在するか否かを判断すると共に、各区間における段差検出波形の有無をコード化し、
前記コード化に際しては、立上がり方向の段差検出波形と、立下がり方向の段差検出波形とを区別しない
ことを特徴とするメダル識別方法。
【請求項8】
メダル通過中に、メダル通過時間を計測すると共に、凹凸パターンの段差検出波形を判定して、当該判定時の時間を順次記憶し、
メダル通過後に、メダル通過時間を複数の区間に分け、各区間における段差検出波形の有無を前記記憶時間にもとづいて判断してコード化する
ことを特徴とする請求項7記載のメダル識別方法。
【請求項9】
メダル通過中に、立上がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立上がり判定処理と、
メダル通過中に、立下がり方向の段差検出波形を判定して、当該判定時の時間を順次記憶する立下がり判定処理と、を別個に行う
ことを特徴とする請求項8記載のメダル識別方法。
【請求項10】
メダル通過時の加速度を加味してメダル通過時間を複数の区間に分ける
ことを特徴とする請求項8又は9記載のメダル識別方法。
【請求項11】
所定の基準周波数で自律的に発振すると共に、磁気ヘッドに設けられる検出コイルのインダクタンス変化に応じて発振波に位相ズレを生じさせる発振回路を用い、
前記発振回路から出力される発振波の周波数測定、周期測定及び/又は位相ズレ測定にもとづいて、メダルの凹凸パターンを検出する
ことを特徴とする請求項7〜10のいずれかに記載のメダル識別方法。
【請求項12】
前記発振回路から出力される発振波の位相ズレ測定にもとづいて、メダルの凹凸パターンを検出するにあたり、
前記発振回路から出力される複数の発振波をカウントし、該カウント数が所定数Nに達したか否かを判断する発振波カウント処理を行い、該発振波カウント処理に要した時間にもとづいて、蓄積された発振波の位相ズレを測定する
ことを特徴とする請求項11記載のメダル識別方法。
【請求項13】
メダル表面及び/又はメダル裏面に、同心円の凹凸パターンで識別コードが記述されたメダルであって、
前記メダル表面及び/又はメダル裏面の半径方向に複数の区間を設定し、各区間に、凹凸パターンの段差を形成するか否かにもとづいて、識別コードを記述し、
前記識別コードの記述に際しては、立上がり方向の段差と、立下がり方向の段差を区別しない
ことを特徴とするメダル。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−176400(P2010−176400A)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2009−18439(P2009−18439)
【出願日】平成21年1月29日(2009.1.29)
【出願人】(591123274)株式会社アヅマシステムズ (31)
【Fターム(参考)】
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願日】平成21年1月29日(2009.1.29)
【出願人】(591123274)株式会社アヅマシステムズ (31)
【Fターム(参考)】
[ Back to top ]