
メータシステム
【課題】システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザに違和感を与えることを低減することのできるメータシステムを提供する。
【解決手段】メータシステム1では、界磁巻線32及び33と半導体スイッチ52及び54とが同一の基板40上に配置されており、同一の制御ユニット60によって、ZPD処理と半導体スイッチ52及び54の双方のオンオフ切替制御とが実行される。また、制御ユニット60は、高必要性実行条件が成立した場合には、(フラッシャ駆動条件の成立・不成立にかかわらず)ZPD処理を実行する一方、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、半導体スイッチ52及び54のオンオフを切替制御し、これら半導体スイッチ52及び54のオンオフを切替制御している間、ZPD処理を実行しない。
【解決手段】メータシステム1では、界磁巻線32及び33と半導体スイッチ52及び54とが同一の基板40上に配置されており、同一の制御ユニット60によって、ZPD処理と半導体スイッチ52及び54の双方のオンオフ切替制御とが実行される。また、制御ユニット60は、高必要性実行条件が成立した場合には、(フラッシャ駆動条件の成立・不成立にかかわらず)ZPD処理を実行する一方、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、半導体スイッチ52及び54のオンオフを切替制御し、これら半導体スイッチ52及び54のオンオフを切替制御している間、ZPD処理を実行しない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ステップモータによって指針を振らせる車両用指示計器を備えるメータシステムに関する。
【背景技術】
【0002】
従来、電気角に応じて交番する駆動信号をステップモータの界磁巻線へ印加することにより指針を回転駆動して、指針の回転位置に応じた車両状態値を指示する車両用指示計器が知られている。このような車両用指示計器では、指針は、車両状態値の零値を指示する零位置に帰零方向への回転により復帰するようになっている。また、零位置から帰零方向へ所定範囲内のストッパ位置にストッパ機構によって停止させ、当該ストッパ位置に対応する電気角を駆動信号制御の基準としている。
【0003】
例えば特許文献1の車両用指示計器では、指針を帰零方向へ回転駆動するようにステップモータの界磁巻線へ印加する駆動信号を制御しながら、界磁巻線に発生する誘起電圧を検出している。これにより指針の回転中は界磁巻線に誘起電圧が発生する一方、指針が停止すると、界磁巻線に発生の誘起電圧が低下することになる。そこで、界磁巻線に発生する誘起電圧の検出電圧が設定値以下となる場合には、指針がストッパ位置にて停止したものと推定し(ストッパ位置検出動作)、当該ストッパ位置に対応する電気角を更新設定している。こうした一連の処理によれば、指示計器の始動前に振動等の外乱によってステップモータが脱調して指針の回転位置がずれていたとしても、更新設定された電気角に基づき駆動信号を正確に制御することが可能となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許3770095号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、メータシステムは、上記車両用指示計器の他に、ターンランプ(ハザードランプ)、ブザー、さらには、ランプの点滅制御及びランプの点滅に連動して吹鳴するブザーの吹鳴制御を行うフラッシャ装置も備えている。近年、こうしたフラッシャ装置の機能(フラッシャ機能)を上記車両用指示計器に取り込むことでシステム統合し、車両の生産コストを低減することが考えられている。
【0006】
しかしながら、上記フラッシャ機能を車両用指示計器に取り込むと、メータシステム内で、上記車両用指示計器を構成する界磁巻線とフラッシャを点滅させるためのフラッシャ半導体スイッチとが近接することがある。また、フラッシャを点滅させるには半導体スイッチをオンオフする必要があり、この半導体スイッチのオンオフによって誘導ノイズが発生する。そのため、ストッパ位置検出動作時にフラッシャ機能部の半導体スイッチが動作すると、上記誘導ノイズに起因してストッパ位置の誤検知が生じ、ストッパ位置がずれてしまうことがある。そして、ひいては、車両状態値の正しい指示ができなくなる不具合が発生する可能性がある。
【0007】
また、ストッパ位置検出動作を実行するには、所定のストッパ位置検出動作実行条件が成立する必要があり、そのストッパ位置検出動作実行条件には、指針がストッパ位置から離れている可能性が高いことから速やかにストッパ位置検出動作を実行する必要性が高い高必要性実行条件と、指針がストッパ位置から離れている可能性は低いものの万全を期すために実行する確認的実行条件とがある。高必要性実行条件が成立した場合、ストッパ位置検出動作を実行する必要性が高い一方、確認的実行条件が成立した場合、ストッパ位置検出動作を実行する必要性はそれほど高くない。また、ストッパ位置検出動作が実行されると、車両状態値を正しく指示することができるようになるものの、ユーザは何ら操作を行っていないのに指針が帰零方向へ回転することからユーザに違和感を与えてしまうことがある。
【0008】
本発明は、上記実情に鑑みてなされたものであって、その目的は、システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザに違和感を与えることを低減することのできるメータシステムを提供することにある。
【課題を解決するための手段】
【0009】
こうした目的を達成するため、請求項1に記載の発明では、高必要性実行条件が成立したと判断された場合には、駆動制御部は、フラッシャ駆動条件の成立・不成立にかかわらずストッパ位置検出動作を実行し、フラッシャオンオフ切替制御部は、駆動制御部によってストッパ位置検出動作が実行されている間、フラッシャ半導体スイッチのオンオフの切替制御を実行しない。すなわち、ストッパ位置検出動作を優先して実行する。一方、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、フラッシャオンオフ切替制御部は、フラッシャ半導体スイッチのオンオフを切替制御し、駆動制御部は、フラッシャ半導体スイッチのオンオフが切替制御されている間、ストッパ位置検出動作を実行しない。すなわち、フラッシャ半導体スイッチのオンオフの切替制御を優先して実行する。
【0010】
このように、請求項1に記載の発明では、高必要性実行条件が成立した場合であっても、確認的実行条件が成立した場合であっても、ストッパ位置検出動作とフラッシャ半導体スイッチのオンオフの切替制御とを同時に実行しない。そのため、ストッパ位置検出動作によって検出されるストッパ位置は、フラッシャ半導体スイッチのオンオフによって発生する誘導ノイズの影響を受けず、駆動制御部によって誘導ノイズの影響を受けた可能性の低いストッパ位置に対応する電気角が零点として設定されるようになる。そして、不正確な零点が駆動信号の基準となる可能性が低くなることから、車両状態値の不正確な指示が発生することを低減することができるようになる。したがって、上記請求項1に記載の発明によれば、システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザに違和感を与えることを低減することができるようになる。
【0011】
なお、フラッシャ機能部は、フラッシャだけでなく、このフラッシャの点滅に連動して吹鳴するブザーを有することとしてもよい。この場合、請求項2に記載の発明のように、車両用指示計器とフラッシャ機能部とをメータシステムとして統合するために、フラッシャ機能部を構成するフラッシャ半導体スイッチ及びブザー半導体スイッチの少なくともいずれか一方とステップモータの界磁巻線とを近接した状態で配置することがある。
【0012】
そこで、請求項2に記載の発明では、高必要性実行条件が成立したと判断された場合には、駆動制御部は、フラッシャ駆動条件の成立・不成立にかかわらずストッパ位置検出動作を実行し、フラッシャオンオフ切替制御部は、駆動制御部によってストッパ位置検出動作が実行されている間、フラッシャ半導体スイッチ及びブザー半導体スイッチのうち界磁巻線に近接した状態で配置された半導体スイッチのオンオフを切替制御しない。すなわち、ストッパ位置検出動作を優先して実行する。一方、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、フラッシャオンオフ切替制御部及びブザーオンオフ切替制御部は、フラッシャ半導体スイッチ及びブザー半導体スイッチのオンオフを切替制御し、駆動制御部は、フラッシャ半導体スイッチ及びブザー半導体スイッチのうち界磁巻線に近接した状態で配置された半導体スイッチのオンオフが切替制御されている間、ストッパ位置検出動作を実行しない。すなわち、半導体スイッチのオンオフの切替制御を優先して実行する。
【0013】
このように、請求項2に記載の発明では、高必要性実行条件が成立した場合であっても、確認的実行条件が成立した場合であっても、ストッパ位置検出動作と半導体スイッチのオンオフの切替制御とを同時に実行しない。そのため、ストッパ位置検出動作によって検出されるストッパ位置は、フラッシャ半導体スイッチ及びブザー半導体スイッチのうち界磁巻線に近接した状態で配置された半導体スイッチのオンオフによって発生する誘導ノイズの影響を受けず、駆動制御部によって誘導ノイズの影響を受けた可能性の低いストッパ位置に対応する電気角が零点として設定されるようになる。そして、不正確な零点が駆動信号の基準となる可能性が低くなることから、車両状態値の不正確な指示が発生することを低減することができるようになる。したがって、上記請求項2に記載の発明によれば、システムを統合しつつも、車両状態値の不正確な指示及びユーザに違和感を与えることを低減することができるようになる。
【0014】
なお、近接した状態で配置される場合としては、フラッシャ半導体スイッチ及びブザー半導体スイッチの少なくともいずれか一方とステップモータの界磁巻線とを同一の基板上に配置することにより、システムが統合された場合がある。あるいは、駆動制御部と、フラッシャオンオフ切替制御部及びブザーオンオフ切替制御部の少なくとも一方とを同一の制御装置によって構成することにより、システムが統合された場合がある。
【0015】
ところで、例えばバッテリ電源の性能が著しく劣化している状況等においては、イグニッションスイッチがオン操作されると、駆動制御部をはじめとする各種機器が一時的に起動するのみでその後に動作停止し、その動作停止後に再度イグニッションスイッチがオン操作されると、各種機器が正常に起動することがある。
【0016】
詳しくは、イグニッションスイッチがオン操作される前においては、駆動制御部をはじめとする各種機器が動作しておらず負荷が軽いことから、バッテリ電源からの供給電圧が各種機器の動作電圧を上回っており、各種機器は一時的に起動する。この各種装置の起動後においては、各種機器が動作開始して負荷が重くなることから、バッテリ電源からの供給電圧が各種機器の動作電圧を下回ってしまい、各種機器が動作停止してしまう(低電圧リセット)。ただし、その動作停止後に再度イグニッションスイッチがオン操作されると、バッテリ電源からの供給電圧が各種機器の動作電圧を再度上回り、各種機器が動作開始する。そして、この際、オルタネータが動作して発電することにより、各種機器がその動作を継続することがある(低電圧リセットからの復帰)。
【0017】
このような低電圧リセットからの復帰時には、各種機器がその復帰前に一時的に動作し、指針をストッパ位置に戻す処理を行わずに動作停止した可能性が高いことから、指針がストッパ位置から離れている可能性が高く、ストッパ位置検出動作を早急に実行する必要性が高い。
【0018】
ここで、高必要性実行条件は、駆動制御部が当該駆動制御部への供給電圧の低下に起因して動作を停止した後、その動作停止後に供給電圧が上昇することで復帰する低電圧リセットからの復帰である。具体的には、請求項3に記載の発明のように、高必要性実行条件は、駆動制御部への供給電圧が所定閾値よりも低い状態で当該駆動制御部が起動したことであることとするとよい。これにより、低電圧リセットからの復帰時において、半導体スイッチのオンオフ切替制御に優先してストッパ位置検出動作を実行することができるようになる。
【0019】
一方、例えばバッテリ電源の性能がそれほど劣化していない状況において、イグニッションスイッチがオン操作されても、上記低電圧リセットされることは少ない。低電圧リセットされていなければ、指針がストッパ位置に戻る処理が行われて動作停止した可能性が高いことから、指針がストッパ位置から離れている可能性が低く、ストッパ位置検出動作を実行する必要性が低い。
【0020】
ここで、確認的実行条件は、上記低電圧リセットからの復帰ではなく通常起動である。具体的には、請求項4に記載の発明のように、確認的実行条件は、駆動制御部への供給電圧が所定閾値以上の状態で当該駆動制御部が起動したことであることとするとよい。これにより、通常起動時において、ストッパ位置検出動作に優先して半導体スイッチのオンオフ切替制御を実行することができるようになる。
【図面の簡単な説明】
【0021】
【図1】本発明に係るメータシステムの一実施の形態について、その正面構造を示す正面図である。
【図2】図1中のII−II線に沿った断面図である。
【図3】本実施の形態のメータシステムについて、その電気回路構成を示すブロック図である。
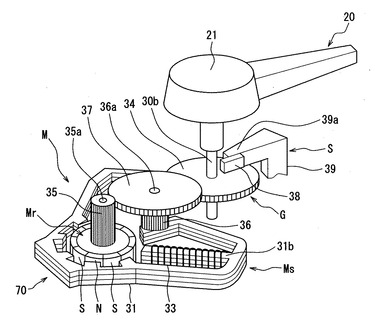
【図4】本実施の形態のメータシステムについて、その要部を斜視方向から示す斜視図である。
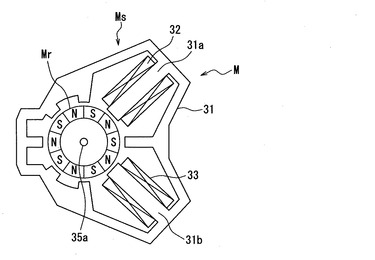
【図5】本実施の形態のメータシステムについて、その要部を平面方向から示す平面図である。
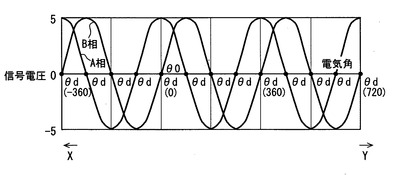
【図6】本実施の形態のメータシステムについて、そのステップモータの界磁巻線に印加される駆動信号の一例を示す特性図である。
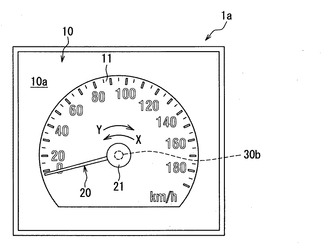
【図7】本発明の形態のメータシステムについて、その指針がストッパ位置に停止した状態を正面方向から示す正面図である。
【図8】本実施の形態のメータシステムによって実行されるメータ起動処理について、その処理手順の一例を示すフローチャートである。
【図9】本実施の形態のメータシステムによって実行されるメータ起動処理の変形例について、その処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明に係るメータシステムの一実施の形態について、図1〜図8を参照しつつ説明する。なお、本実施の形態では、メータシステム1は車速計として車両内の運転席前方に設置されているものとする。
【0023】
メータシステム1は、図1〜図3に示されるように、計器板10、指針20、回動内機30、基板40、及び制御ユニット60を有する車両用指示計器1aを備えて構成されている。
【0024】
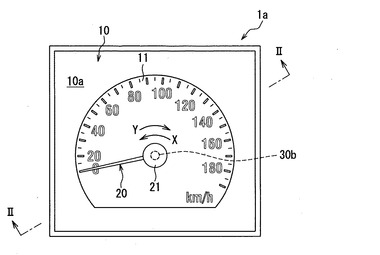
図1に示されるように、計器板10は、車速値を表示する車速表示部11を表示面10aに有しており、その表示面10aが運転席側へ向けて配置されている。車速表示部11は、車速値の基準となる零値(0km/h)から上限値(180km/h)にかけて、複数の車速値(0km/h、20km/h、・・・、160km/h、180km/h)を円弧状に表示している。なお、車速値が特許請求の範囲に記載の車両状態値に相当し、計器板10が特許請求の範囲に記載の目盛板に相当する。
【0025】
図1及び図2に示されるように、指針20は、回動内機30の指針軸30bに基端部21側にて連結されており、帰零方向X及びその反対の離零方向Yへ計器板10の表示面10aに沿って回転可能となっている。指針20は、帰零方向Xあるいは離零方向Yへ回転することにより、車速表示部11に表示される車速値のうち回転位置に応じた値を指示する。また、指針20は、零値を指示する零位置に帰零方向Xへの回転によって復帰可能となっている。なお、本実施の形態では、帰零方向Xとは上限値から零値へ向かう方向であり、離零方向Yとは零値から上限値へ向かう方向である。
【0026】
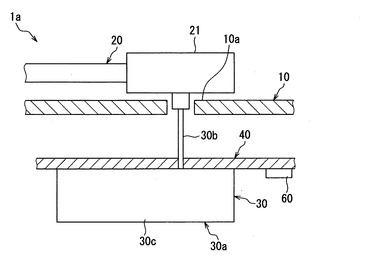
図2に示されるように、回動内機30は、内機本体30a、指針軸30b、及びケーシング30cを備えて構成されている。内機本体30aは、計器板10に略平行な基板40の背面側に配置されている。内機本体30aは、二相式ステップモータM、減速歯車機構G、及びストッパ機構S(図4)を、ケーシング30cに内蔵している。指針軸30bは、基板40の背面に固定されたケーシング30cによって支持されており、基板40及び計器板10を貫通して指針20の基端部21を支持している。内機本体30aは、ステップモータMの回転に連動する減速歯車機構Gの減速回転により、当該減速歯車機構Gの出力段歯車34と同軸上の指針軸30b、ひいては指針20を回転駆動する。
【0027】
図4及び図5に示されるように、ステップモータMは、ステータMs及びマグネットロータMrを組み合わせて構成されている。ステータMsは、ヨーク31及び二相の界磁巻線32及び33を有している。ヨーク31は、ポール状を呈する一対の磁極31a及び31bを有し、磁極31aにはA相の界磁巻線32が巻装される一方、磁極31bにはB相の界磁巻線33が巻装されている。マグネットロータMrは、減速歯車機構Gの回転軸35aに同軸上に固定されている。ヨーク31の各磁極31a及び31bの先端面との間に隙間をあけるマグネットロータMrの外周面には、磁極としてのN極及びS極が回転方向において交互に形成されている。
【0028】
このような構成を有するステップモータMにおいては、図6に示されるように、電気角に応じて電圧が余弦関数状に交番する交流のA相駆動信号がA相の界磁巻線32に印加される一方、電気角に応じて電圧が正弦関数状に交番する交流のB相駆動信号がB相の界磁巻線33に印加される。このような互いに90度位相のずれたA相及びB相の駆動信号が印加されると、各界磁巻線32及び33に交流磁束が発生し、その発生した交流磁束がヨーク31及びマグネットロータMrの磁極間を通過する。そして、マグネットロータMrは、電気角に応じたA相及びB相の駆動信号の電圧変化に従って回転する。
【0029】
図4に示されるように、減速歯車機構Gは、平歯車からなる複数の歯車34〜37を有している。出力段歯車34は、指針軸30bと同軸上に連結されており、入力段歯車35は、ケーシング30cに支持された回転軸35aに同軸上に固定されている。中間歯車36及び37は、ケーシング30cに固定された回転軸36aにより同軸上に支持されることで、一体に回転可能となっている。そして、中間歯車36は出力段歯車34と噛合しており、中間歯車37は入力段歯車35と噛合している。
【0030】
このように構成されることにより、減速歯車機構Gは、ステップモータMのマグネットロータMrの回転を減速して当該減速回転を指針20へと伝達する。したがって、電気角に応じたA相及びB相の駆動信号の変化に従ってマグネットロータMrの回転位置が変化することにより、指針20の回転位置も変化する。なお、本実施の形態では、電気角を減少させる方向が指針20の帰零方向Xに対応しており、電気角を増大させる方向が指針20の離零方向Yに対応している。
【0031】
また、図4に示されるように、ストッパ機構Sは、当接部材38及びストッパ部材39を有している。当接部材38は、出力段歯車34から突出する短冊板状に形成されており、当該歯車34と一体に回転可能となっている。ストッパ部材39は、ケーシング30cから内部へ突出するL字状に形成されており、当接部材38の回転軌道上において突出側の先端部39aが当接部材38よりも帰零方向Xの対応側に位置している。
【0032】
図7に示されるように、指針20は、帰零方向Xへの回転により当接部材38がストッパ部材39の先端部39aに係止された状態において、零位置から帰零方向Xの所定範囲内となるストッパ位置にて停止するようになっている。本実施の形態では、後述するZPD処理において、ストッパ位置に対応する電気角が零点θ0(0度)として更新設定されるようになっている(図8参照)。ちなみに、ストッパ位置は、メータシステム1の製造時に、指針20の零位置から帰零方向XへステップモータMの電気角に換算して例えば450度の範囲内に設定される。
【0033】
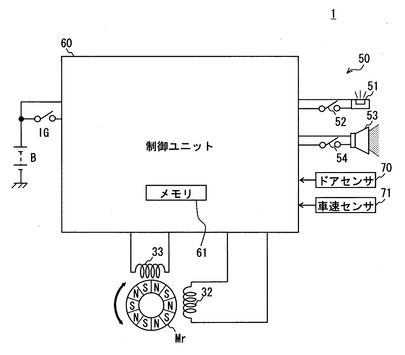
また、メータシステム1は、図3に示されるように、インジケータ51、フラッシャ半導体スイッチ52、ブザー53、ブザー半導体スイッチ54を有するフラッシャ機能部50を備えて構成されている。
【0034】
このうち、インジケータ51は、表示面10a(図1では図示略)に配置されており、フラッシャ半導体スイッチ52を介して制御ユニット60に接続されている。インジケータ51は、フラッシャ半導体スイッチ52がオンとされる場合には、制御ユニット60から電源が供給されて点灯する一方、フラッシャ半導体スイッチ52がオフとされる場合には、制御ユニット60からの電源が遮断されて消灯する。そして、制御ユニット60によってフラッシャ半導体スイッチ52のオンオフが切替制御されることによりインジケータ51は点滅する。
【0035】
また、ブザー53は、ブザー半導体スイッチ54を介して制御ユニット60に接続されている。ブザー53は、ブザー半導体スイッチ54がオンとされる場合には、制御ユニット60から電源が供給されて吹鳴する一方、ブザー半導体スイッチ54がオフとされる場合には、制御ユニット60からの電源が遮断されて吹鳴しない。そして、制御ユニット60によってフラッシャ半導体スイッチ52のオンオフに連動してブザー半導体スイッチ54のオンオフが切替制御されることにより、ブザー53はインジケータ51に連動して吹鳴する。
【0036】
なお、インジケータ51は、図3では便宜上、単一のインジケータとして図示されているが、実際には、車両が右折する旨を示すための図示しない右折用ターンランプの点滅に同期して点滅する右折用インジケータと、車両が左折をする旨示すための図示しない左折用ターンランプの点滅に同期して点滅する左折用インジケータとを有している。また、インジケータ51が特許請求の範囲に記載のフラッシャに相当する。
【0037】
制御ユニット60は、メモリ61を有するマイクロコンピュータを主体に構成されており、基板40に実装されている(図2)。メモリ61には、後述するメータ起動処理(ストッパ位置検出動作、零点設定動作、ZPD処理等を含む)S1を実行するための実行プログラムが記憶されており、メータ起動処理S1が実行されることにより設定(更新)された最新の零点θ0も記憶される。また、メモリ61には、制御ユニット60の起動中にZPD処理が実行された旨を示すZPDフラグの記憶領域が確保されている。
【0038】
制御ユニット60は、フラッシャ機能部50、車両のドアセンサ70、車速センサ71、イグニッションスイッチIG、及びバッテリ電源Bと電気的に接続されている。制御ユニット60は、ドアセンサ70により車両のドアの開放が検出されると、バッテリ電源Bからの直接的な給電によって起動する。また、制御ユニット60は、起動してから設定時間(例えば2分)が経過するまでにイグニッションスイッチIGがオン操作された場合、バッテリ電源Bからの給電によって起動状態を維持するとともに、その後にイグニッションスイッチIGがオフ操作されると、スリープする。一方、制御ユニット60は、起動してから設定時間が経過するまでにイグニッションスイッチIGがオン操作されなかった場合、スリープするとともに、そのスリープ後にイグニッションスイッチIGがオン操作されると、再起動する。なお、スリープ後の再起動については、イグニッションスイッチIGのオン操作がされた場合以外にも、例えば車両ドアが開放された場合や、ブレーキペダルが踏み込まれた場合等としてもよい。また、制御ユニット60は、その起動中にZPD処理を実行した場合にはZPDフラグをセットするとともに、スリープする直前にZPDフラグをリセットする。また、後述するように、制御ユニット60は、その起動時に、バッテリ電源Bから供給される電圧(供給電圧)が所定閾値以上であるか所定閾値よりも低いかを判断することにより、当該起動が「低電圧リセットからの復帰」であるかあるいは「通常起動」であるかを判断する。なお、本実施の形態では、所定閾値として例えば「7[V]」を採用するが、これに限られず「8[V]」や「6[V]」等を採用してもよい。
【0039】
制御ユニット60は、所定のストッパ位置検出動作実行条件が成立した場合、ストッパ位置検出動作を実行する。ここで、ストッパ位置検出動作とは、その概略を説明すると、指針20が一旦離零方向Yへ回転した後、帰零方向Xへ回転するように、ステップモータMの界磁巻線32及び33へ印加するA相及びB相の駆動信号を制御しながら、それら界磁巻線32及び33に発生する誘起電圧を検出し、この検出した誘起電圧を用いて指針20がストッパ位置に停止したことを検出する動作である。なお、このストッパ位置検出動作については公知であるため、ここでの詳しい説明を割愛する。
【0040】
また、ストッパ位置検出動作実行条件は、制御ユニット60が起動することであり、制御ユニット60は、例えば、車両ドアが開放されたり、イグニッションスイッチIGがオン操作されたり、ブレーキペダルが踏み込まれたりすることで起動する。また、制御ユニット60は、上記ストッパ位置検出動作を実行することによって検出したストッパ位置に対応する電気角を零点θ0として設定(更新)する動作である零点設定動作を実行する。したがって、制御ユニット60が特許請求の範囲に記載の零点設定手段に相当する。なお、上記ストッパ位置検出動作及び上記零点設定動作を併せてZPD処理とも記載する。そして、制御ユニット60は、上記ZPD処理を実行することによって設定した零点θ0を基準として、A相及びB相の駆動信号をステップモータMの界磁巻線32及び33へ印加する。また、制御ユニット60が特許請求の範囲に記載のストッパ位置検出動作実行手段、零点設定手段、印加手段、駆動制御部に相当する。
【0041】
制御ユニット60は、上記ZPD処理実行後の起動状態において、メモリ61に記憶されている電気角の零点θ0を基準としたA相及びB相の駆動信号を制御することにより、車速センサ71の検出車速値を指針20に指示させる。
【0042】
また、制御ユニット60は、ユーザの手動操作に基づく所定のフラッシャ駆動条件が成立するか否かを判断し、フラッシャ駆動条件が成立したと判断した場合、その成立したと判断したフラッシャ駆動条件に応じた態様にてフラッシャを点滅させるためにフラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。
【0043】
詳しくは、フラッシャ駆動条件には、例えば、車両が右折する旨を示す右折用ターンランプを点滅させたり、車両が左折する旨を示す左折用ターンランプを点滅させたりする図示しないコンビネーションレバーがターンランプ点滅位置(基準位置から上下方向に所定角度ずれた位置)に設定されていることや、それら右折用ターンランプ及び左折用ターンランプを双方とも点滅させるための図示しないハザードランプスイッチがオン状態に設定されていることが含まれる。
【0044】
そして、制御ユニット60は、右折用ターンランプを点滅させる位置にコンビネーションレバーが設定されると、右折用ターンランプの点滅に連動して右折用インジケータが点滅するとともにブザー53が吹鳴するように、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。同様に、制御ユニット60は、左折用ターンランプを点滅させる位置にコンビネーションレバーが設定されると、左折用ターンランプの点滅に連動して左折用インジケータが点滅するとともにブザー53が吹鳴するように、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。さらに、制御ユニット60は、ハザードランプスイッチがオン状態に設定されると、右折用ターンランプ及び左折用ターンランプ双方の点滅に連動してインジケータ51が点滅するとともにブザー53が吹鳴するように、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。なお、制御ユニット60が特許請求の範囲に記載のフラッシャオンオフ切替制御部及びブザーオンオフ切替制御部に相当する。
【0045】
ここで、本実施の形態のメータシステム1では、ステップモータMを構成する界磁巻線32及び33は基板40上に配置されているとともに、フラッシャ機能部50を構成するフラッシャ半導体スイッチ52及びブザー半導体スイッチ54も同一の基板40上に配置されており、同一の基板40上に配置されている。
【0046】
また、本実施の形態のメータシステム1では、同一の制御ユニット60によって、上記ZPD処理と、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方のオンオフの切替制御とが実行される。
【0047】
このようにして車両用指示計器1aとフラッシャ機能部50とをメータシステム1として統合することにより、車両のシステムコストを低減することができる。そして、界磁巻線32及び33とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54とは近接した状態で配置されている。
【0048】
界磁巻線32及び33とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54とが近接した状態で配置されている場合、ステップモータMの上記ZPD処理の実行時にフラッシャ機能部50が動作すると、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフの切替制御によって発生する誘導ノイズに起因してストッパ位置の誤検知が生じ、ストッパ位置がずれてしまうことがある。そして、ひいては、車速値(車両状態値)の正しい指示ができなくなる不具合が発生する可能性がある。
【0049】
また、ストッパ位置検出動作を実行するには、所定のストッパ位置検出動作実行条件が成立する必要があり、そのストッパ位置検出動作実行条件には、指針20がストッパ位置から離れている可能性が高いことから速やかにストッパ位置検出動作を実行する必要性が高い高必要性実行条件と、指針20がストッパ位置から離れている可能性は低いものの万全を期すために実行する確認的実行条件とがある。高必要性実行条件が成立した場合、ストッパ位置検出動作を実行する必要性が高い一方、確認的実行条件が成立した場合、ストッパ位置検出動作を実行する必要性はそれほど高くない。また、ストッパ位置検出動作が実行されると、車速値を正しく指示することができるようになるものの、ユーザは何ら操作を行っていないのに指針が帰零方向へ回転することからユーザに違和感を与えてしまうことがある。
【0050】
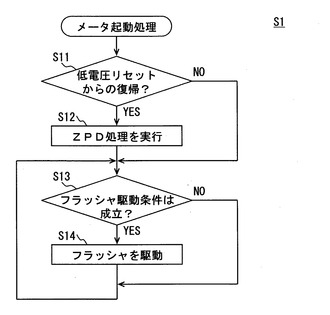
そこで、本実施の形態では、制御ユニット60は、その起動直後に、図8に示すメータ起動処理S1を実行することとした。なお、ストッパ位置検出動作実行条件は制御ユニット60が起動することであることは既述の通りである。そのため、制御ユニット60が起動した時点で上記ストッパ位置検出動作実行条件が成立する。
【0051】
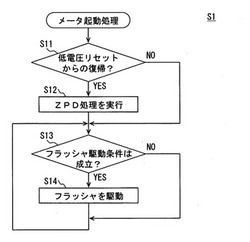
制御ユニット60がその起動直後にメータ起動処理S1を実行開始すると、まず、ステップS11の判断処理として、バッテリ電源Bの供給電圧が所定閾値以上であるか所定閾値よりも低いかを判断することにより、「低電圧リセットからの復帰」であるか否かを判断する。
【0052】
ここで、「低電圧リセットからの復帰」について説明する。すなわち、例えばバッテリBの性能が著しく劣化している状況等において、イグニッションスイッチIGがオン操作されると、車両に搭載される各種機器(制御ユニット60を含む)が一時的に起動するのみでその後に動作停止し、その動作停止後に再度イグニッションスイッチIGがオン操作されると、各種機器が正常に起動することがある。
【0053】
詳しくは、イグニッションスイッチIGがオン操作される前においては、各種機器が動作しておらず負荷が軽いことから、バッテリ電源Bの供給電圧が各種機器の動作電圧を上回っており、各種機器は一時的に起動する。この各種機器の起動後においては、各種機器が動作開始して負荷が重くなることから、バッテリ電源Bの供給電圧が低下して各種機器の動作電圧を下回ってしまい、各種機器が動作停止してしまう(低電圧リセット)。
【0054】
ただし、その動作停止後にイグニッションスイッチIGがオン操作されると、バッテリ電源Bの供給電圧が上昇して各種機器の動作電圧を再度上回り、動作開始する。そして、この際、オルタネータが動作して発電することにより、各種機器が動作を継続することがある(低電圧リセットからの復帰)。
【0055】
このような低電圧リセットからの復帰時には、各種機器がその復帰前に一時的に動作し、指針20をストッパ位置に戻す処理を行わずに動作停止した可能性が高いことから、指針20がストッパ位置から離れている可能性が高く、ストッパ位置検出動作を早急に実行する必要性が高い。
【0056】
一方、例えばバッテリ電源Bの性能がそれほど劣化していない状況において、イグニッションスイッチIGがオン操作されても、上記低電圧リセットされることは少ない。低電圧リセットされていなければ、指針20がストッパ位置に戻す処理が行われて動作停止した可能性が高いことから、指針20がストッパ位置から離れている可能性は低く、ストッパ位置検出動作を実行する必要性が低い。
【0057】
したがって、上記ステップS11の判断処理において、低電圧リセットからの復帰であると判断される場合(ステップS11の判断処理において「Yes」)、上記高必要性実行条件が成立したことを意味する。そしてこの場合、制御ユニット60は、続くステップS12の処理として、(フラッシャ駆動条件の成立・不成立にかかわらず)ZPD処理を実行し、続くステップS13の判断処理に移行する。
【0058】
一方、上記ステップS11の判断処理において、低電圧リセットからの復帰であると判断されない場合(ステップS11の判断処理において「No」)、確認的実行条件が成立したことを意味する。そしてこの場合、制御ユニット60は、ZPD処理を実行することなく、続くステップS13の判断処理に移行する。
【0059】
ステップS13の判断処理に移行すると、制御ユニット60は、フラッシャ駆動条件が成立したか否かを判断する。ここで、フラッシャ駆動条件が成立したと判断された場合(ステップS13の判断処理で「Yes」)、制御ユニット60は、続くステップS14の処理として、その成立したと判断されたフラッシャ駆動条件に応じた態様にてインジケータ51を点滅させるとともにその点滅に連動してブザー53を吹鳴させるために、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。これら半導体スイッチ52及び54のオンオフを切替制御すると、制御ユニット60は、このステップS13の判断処理に移行し再度実行する。一方、フラッシャ駆動条件が成立したと判断されなかった場合(ステップS13の判断処理で「No」)、制御ユニット60は、このステップS13の判断処理に移行し再度実行する。
【0060】
このようにして、制御ユニット60は、高必要性実行条件が成立した場合には、(フラッシャ駆動条件の成立・不成立に関わらず)ZPD処理を実行し、ZPD処理を実行している間、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフの切替制御を実行しない。そのため、ストッパ位置検出動作を優先して実行することができるようになる。一方、制御ユニット60は、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御し、これらフラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御している間、ZPD処理を実行しない。そのため、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフの切替制御を優先して実行することができるようになる。
【0061】
また、制御ユニット60は、高必要性実行条件が成立した場合であっても、確認的実行条件が成立した場合であっても、ZPD処理とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフの切替制御とを同時に実行しない。そのため、ストッパ位置検出動作によって検出されるストッパ位置は、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフによって発生する誘導ノイズの影響を受けず、制御ユニット60によって誘導ノイズの影響を受けた可能性の低いストッパ位置に対応する電気角が零点θ0として設定されるようになる。そして、不正確な零点θ0が駆動信号の基準となる可能性が低くなることから、車速値(車両状態値)の不正確な指示が発生することを低減することができるようになる。
【0062】
以上説明したように、メータシステム1によれば、システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザに違和感を与えることをより低減することができるようになる。
【0063】
なお、本発明に係るメータシステム1は、上記実施の形態にて例示した構成に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、種々に変形して実施することが可能である。すなわち、上記実施の形態を適宜変更した例えば次の形態として実施することもできる。
【0064】
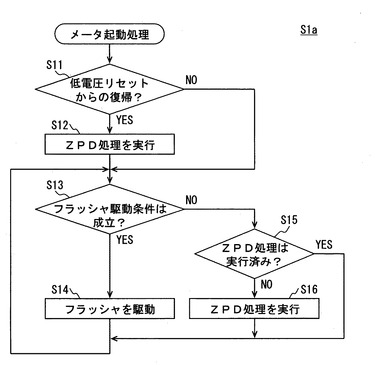
上記実施の形態のメータシステム1では、高必要性実行条件は成立していない(すなわち確認的実行条件が成立している)場合にはZPD処理を実行しない上記メータ起動処理S1(図8)を実行していたがこれに限らず、図8に対応する図として図9に示すメータ起動処理S1aを実行することとしてもよい。具体的には、ステップS13の判断処理において、フラッシャ駆動条件が成立したと判断されなかった場合(ステップS13の判断処理で「No」)、高必要性実行条件は成立していないものの、確認的実行条件が成立していることを意味する。そこで、制御ユニット60は、先のステップS13の判断処理において、フラッシャ駆動条件が成立したと判断されなかった場合(ステップS13の判断処理で「No」)、続くステップS15の判断処理として、メモリ61に記憶されているZPDフラグがセットされているかリセットされているかを判断することにより、ZPD処理は実行済みであるか否かを判断する。ここで、ZPDフラグがリセットされておりZPD処理は実行済みであると判断されなかった場合(ステップS15の判断処理で「No」)、制御ユニット60は、続くステップS16の処理として、ZPD処理を実行する。一方、ZPDフラグがセットされておりZPD処理は実行済みである判断された場合、制御ユニット60は、先のステップS13の判断処理に移行し、このステップS13の判断処理を再度実行する。
【0065】
上記実施の形態のメータシステム1では、界磁巻線32及び33の双方とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方とが同一の基板40上に配置された構成であるとともに、同一の制御ユニット60によって上記ZPD処理とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方のオンオフ切替制御とが実行される構成であるが、これに限らない。界磁巻線32及び33の双方とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方とが同一の基板40上に配置された構成であるが、上記ZPD処理を行う制御ユニットと上記半導体スイッチ52及び54の双方のオンオフ切替制御を行う制御ユニットとが別の制御装置である構成としてもよく、同一の制御ユニット60によって上記ZPD処理とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方のオンオフの切替制御とが実行される構成であるが、界磁巻線32及び33の双方とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方とが同一の基板上に配置されていない構成としてもよい。
【0066】
また、界磁巻線32及び33の双方とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方とが同一の基板40上に配置された構成に限らず、界磁巻線32及び33のいずれか一方のみとフラッシャ半導体スイッチ52及びブザー半導体スイッチ54のいずれか一方のみとが同一の基板40上に配置された構成としてもよい。
【0067】
また、制御ユニット60によって上記ZPD処理とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方のオンオフの切替制御との少なくとも一方が実行される構成としてもよい。
【符号の説明】
【0068】
1…メータシステム、1a…車両用指示計器、10…計器板、10a…表示板、20…指針、30…回動内機、30a…内機本体、32,33…界磁巻線、40…基板、50…フラッシャ機能部、51…インジケータ(フラッシャ)、52…フラッシャ半導体スイッチ、53…ブザー、54…ブザー半導体スイッチ、60…制御ユニット(制御装置)、61…メモリ、71…ドアセンサ、71…車速センサ、G…減速歯車機構、M…ステップモータ、S…ストッパ機構、X…帰零方向、Y…離零方向、θ0…零点
【技術分野】
【0001】
本発明は、ステップモータによって指針を振らせる車両用指示計器を備えるメータシステムに関する。
【背景技術】
【0002】
従来、電気角に応じて交番する駆動信号をステップモータの界磁巻線へ印加することにより指針を回転駆動して、指針の回転位置に応じた車両状態値を指示する車両用指示計器が知られている。このような車両用指示計器では、指針は、車両状態値の零値を指示する零位置に帰零方向への回転により復帰するようになっている。また、零位置から帰零方向へ所定範囲内のストッパ位置にストッパ機構によって停止させ、当該ストッパ位置に対応する電気角を駆動信号制御の基準としている。
【0003】
例えば特許文献1の車両用指示計器では、指針を帰零方向へ回転駆動するようにステップモータの界磁巻線へ印加する駆動信号を制御しながら、界磁巻線に発生する誘起電圧を検出している。これにより指針の回転中は界磁巻線に誘起電圧が発生する一方、指針が停止すると、界磁巻線に発生の誘起電圧が低下することになる。そこで、界磁巻線に発生する誘起電圧の検出電圧が設定値以下となる場合には、指針がストッパ位置にて停止したものと推定し(ストッパ位置検出動作)、当該ストッパ位置に対応する電気角を更新設定している。こうした一連の処理によれば、指示計器の始動前に振動等の外乱によってステップモータが脱調して指針の回転位置がずれていたとしても、更新設定された電気角に基づき駆動信号を正確に制御することが可能となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許3770095号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、メータシステムは、上記車両用指示計器の他に、ターンランプ(ハザードランプ)、ブザー、さらには、ランプの点滅制御及びランプの点滅に連動して吹鳴するブザーの吹鳴制御を行うフラッシャ装置も備えている。近年、こうしたフラッシャ装置の機能(フラッシャ機能)を上記車両用指示計器に取り込むことでシステム統合し、車両の生産コストを低減することが考えられている。
【0006】
しかしながら、上記フラッシャ機能を車両用指示計器に取り込むと、メータシステム内で、上記車両用指示計器を構成する界磁巻線とフラッシャを点滅させるためのフラッシャ半導体スイッチとが近接することがある。また、フラッシャを点滅させるには半導体スイッチをオンオフする必要があり、この半導体スイッチのオンオフによって誘導ノイズが発生する。そのため、ストッパ位置検出動作時にフラッシャ機能部の半導体スイッチが動作すると、上記誘導ノイズに起因してストッパ位置の誤検知が生じ、ストッパ位置がずれてしまうことがある。そして、ひいては、車両状態値の正しい指示ができなくなる不具合が発生する可能性がある。
【0007】
また、ストッパ位置検出動作を実行するには、所定のストッパ位置検出動作実行条件が成立する必要があり、そのストッパ位置検出動作実行条件には、指針がストッパ位置から離れている可能性が高いことから速やかにストッパ位置検出動作を実行する必要性が高い高必要性実行条件と、指針がストッパ位置から離れている可能性は低いものの万全を期すために実行する確認的実行条件とがある。高必要性実行条件が成立した場合、ストッパ位置検出動作を実行する必要性が高い一方、確認的実行条件が成立した場合、ストッパ位置検出動作を実行する必要性はそれほど高くない。また、ストッパ位置検出動作が実行されると、車両状態値を正しく指示することができるようになるものの、ユーザは何ら操作を行っていないのに指針が帰零方向へ回転することからユーザに違和感を与えてしまうことがある。
【0008】
本発明は、上記実情に鑑みてなされたものであって、その目的は、システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザに違和感を与えることを低減することのできるメータシステムを提供することにある。
【課題を解決するための手段】
【0009】
こうした目的を達成するため、請求項1に記載の発明では、高必要性実行条件が成立したと判断された場合には、駆動制御部は、フラッシャ駆動条件の成立・不成立にかかわらずストッパ位置検出動作を実行し、フラッシャオンオフ切替制御部は、駆動制御部によってストッパ位置検出動作が実行されている間、フラッシャ半導体スイッチのオンオフの切替制御を実行しない。すなわち、ストッパ位置検出動作を優先して実行する。一方、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、フラッシャオンオフ切替制御部は、フラッシャ半導体スイッチのオンオフを切替制御し、駆動制御部は、フラッシャ半導体スイッチのオンオフが切替制御されている間、ストッパ位置検出動作を実行しない。すなわち、フラッシャ半導体スイッチのオンオフの切替制御を優先して実行する。
【0010】
このように、請求項1に記載の発明では、高必要性実行条件が成立した場合であっても、確認的実行条件が成立した場合であっても、ストッパ位置検出動作とフラッシャ半導体スイッチのオンオフの切替制御とを同時に実行しない。そのため、ストッパ位置検出動作によって検出されるストッパ位置は、フラッシャ半導体スイッチのオンオフによって発生する誘導ノイズの影響を受けず、駆動制御部によって誘導ノイズの影響を受けた可能性の低いストッパ位置に対応する電気角が零点として設定されるようになる。そして、不正確な零点が駆動信号の基準となる可能性が低くなることから、車両状態値の不正確な指示が発生することを低減することができるようになる。したがって、上記請求項1に記載の発明によれば、システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザに違和感を与えることを低減することができるようになる。
【0011】
なお、フラッシャ機能部は、フラッシャだけでなく、このフラッシャの点滅に連動して吹鳴するブザーを有することとしてもよい。この場合、請求項2に記載の発明のように、車両用指示計器とフラッシャ機能部とをメータシステムとして統合するために、フラッシャ機能部を構成するフラッシャ半導体スイッチ及びブザー半導体スイッチの少なくともいずれか一方とステップモータの界磁巻線とを近接した状態で配置することがある。
【0012】
そこで、請求項2に記載の発明では、高必要性実行条件が成立したと判断された場合には、駆動制御部は、フラッシャ駆動条件の成立・不成立にかかわらずストッパ位置検出動作を実行し、フラッシャオンオフ切替制御部は、駆動制御部によってストッパ位置検出動作が実行されている間、フラッシャ半導体スイッチ及びブザー半導体スイッチのうち界磁巻線に近接した状態で配置された半導体スイッチのオンオフを切替制御しない。すなわち、ストッパ位置検出動作を優先して実行する。一方、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、フラッシャオンオフ切替制御部及びブザーオンオフ切替制御部は、フラッシャ半導体スイッチ及びブザー半導体スイッチのオンオフを切替制御し、駆動制御部は、フラッシャ半導体スイッチ及びブザー半導体スイッチのうち界磁巻線に近接した状態で配置された半導体スイッチのオンオフが切替制御されている間、ストッパ位置検出動作を実行しない。すなわち、半導体スイッチのオンオフの切替制御を優先して実行する。
【0013】
このように、請求項2に記載の発明では、高必要性実行条件が成立した場合であっても、確認的実行条件が成立した場合であっても、ストッパ位置検出動作と半導体スイッチのオンオフの切替制御とを同時に実行しない。そのため、ストッパ位置検出動作によって検出されるストッパ位置は、フラッシャ半導体スイッチ及びブザー半導体スイッチのうち界磁巻線に近接した状態で配置された半導体スイッチのオンオフによって発生する誘導ノイズの影響を受けず、駆動制御部によって誘導ノイズの影響を受けた可能性の低いストッパ位置に対応する電気角が零点として設定されるようになる。そして、不正確な零点が駆動信号の基準となる可能性が低くなることから、車両状態値の不正確な指示が発生することを低減することができるようになる。したがって、上記請求項2に記載の発明によれば、システムを統合しつつも、車両状態値の不正確な指示及びユーザに違和感を与えることを低減することができるようになる。
【0014】
なお、近接した状態で配置される場合としては、フラッシャ半導体スイッチ及びブザー半導体スイッチの少なくともいずれか一方とステップモータの界磁巻線とを同一の基板上に配置することにより、システムが統合された場合がある。あるいは、駆動制御部と、フラッシャオンオフ切替制御部及びブザーオンオフ切替制御部の少なくとも一方とを同一の制御装置によって構成することにより、システムが統合された場合がある。
【0015】
ところで、例えばバッテリ電源の性能が著しく劣化している状況等においては、イグニッションスイッチがオン操作されると、駆動制御部をはじめとする各種機器が一時的に起動するのみでその後に動作停止し、その動作停止後に再度イグニッションスイッチがオン操作されると、各種機器が正常に起動することがある。
【0016】
詳しくは、イグニッションスイッチがオン操作される前においては、駆動制御部をはじめとする各種機器が動作しておらず負荷が軽いことから、バッテリ電源からの供給電圧が各種機器の動作電圧を上回っており、各種機器は一時的に起動する。この各種装置の起動後においては、各種機器が動作開始して負荷が重くなることから、バッテリ電源からの供給電圧が各種機器の動作電圧を下回ってしまい、各種機器が動作停止してしまう(低電圧リセット)。ただし、その動作停止後に再度イグニッションスイッチがオン操作されると、バッテリ電源からの供給電圧が各種機器の動作電圧を再度上回り、各種機器が動作開始する。そして、この際、オルタネータが動作して発電することにより、各種機器がその動作を継続することがある(低電圧リセットからの復帰)。
【0017】
このような低電圧リセットからの復帰時には、各種機器がその復帰前に一時的に動作し、指針をストッパ位置に戻す処理を行わずに動作停止した可能性が高いことから、指針がストッパ位置から離れている可能性が高く、ストッパ位置検出動作を早急に実行する必要性が高い。
【0018】
ここで、高必要性実行条件は、駆動制御部が当該駆動制御部への供給電圧の低下に起因して動作を停止した後、その動作停止後に供給電圧が上昇することで復帰する低電圧リセットからの復帰である。具体的には、請求項3に記載の発明のように、高必要性実行条件は、駆動制御部への供給電圧が所定閾値よりも低い状態で当該駆動制御部が起動したことであることとするとよい。これにより、低電圧リセットからの復帰時において、半導体スイッチのオンオフ切替制御に優先してストッパ位置検出動作を実行することができるようになる。
【0019】
一方、例えばバッテリ電源の性能がそれほど劣化していない状況において、イグニッションスイッチがオン操作されても、上記低電圧リセットされることは少ない。低電圧リセットされていなければ、指針がストッパ位置に戻る処理が行われて動作停止した可能性が高いことから、指針がストッパ位置から離れている可能性が低く、ストッパ位置検出動作を実行する必要性が低い。
【0020】
ここで、確認的実行条件は、上記低電圧リセットからの復帰ではなく通常起動である。具体的には、請求項4に記載の発明のように、確認的実行条件は、駆動制御部への供給電圧が所定閾値以上の状態で当該駆動制御部が起動したことであることとするとよい。これにより、通常起動時において、ストッパ位置検出動作に優先して半導体スイッチのオンオフ切替制御を実行することができるようになる。
【図面の簡単な説明】
【0021】
【図1】本発明に係るメータシステムの一実施の形態について、その正面構造を示す正面図である。
【図2】図1中のII−II線に沿った断面図である。
【図3】本実施の形態のメータシステムについて、その電気回路構成を示すブロック図である。
【図4】本実施の形態のメータシステムについて、その要部を斜視方向から示す斜視図である。
【図5】本実施の形態のメータシステムについて、その要部を平面方向から示す平面図である。
【図6】本実施の形態のメータシステムについて、そのステップモータの界磁巻線に印加される駆動信号の一例を示す特性図である。
【図7】本発明の形態のメータシステムについて、その指針がストッパ位置に停止した状態を正面方向から示す正面図である。
【図8】本実施の形態のメータシステムによって実行されるメータ起動処理について、その処理手順の一例を示すフローチャートである。
【図9】本実施の形態のメータシステムによって実行されるメータ起動処理の変形例について、その処理手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明に係るメータシステムの一実施の形態について、図1〜図8を参照しつつ説明する。なお、本実施の形態では、メータシステム1は車速計として車両内の運転席前方に設置されているものとする。
【0023】
メータシステム1は、図1〜図3に示されるように、計器板10、指針20、回動内機30、基板40、及び制御ユニット60を有する車両用指示計器1aを備えて構成されている。
【0024】
図1に示されるように、計器板10は、車速値を表示する車速表示部11を表示面10aに有しており、その表示面10aが運転席側へ向けて配置されている。車速表示部11は、車速値の基準となる零値(0km/h)から上限値(180km/h)にかけて、複数の車速値(0km/h、20km/h、・・・、160km/h、180km/h)を円弧状に表示している。なお、車速値が特許請求の範囲に記載の車両状態値に相当し、計器板10が特許請求の範囲に記載の目盛板に相当する。
【0025】
図1及び図2に示されるように、指針20は、回動内機30の指針軸30bに基端部21側にて連結されており、帰零方向X及びその反対の離零方向Yへ計器板10の表示面10aに沿って回転可能となっている。指針20は、帰零方向Xあるいは離零方向Yへ回転することにより、車速表示部11に表示される車速値のうち回転位置に応じた値を指示する。また、指針20は、零値を指示する零位置に帰零方向Xへの回転によって復帰可能となっている。なお、本実施の形態では、帰零方向Xとは上限値から零値へ向かう方向であり、離零方向Yとは零値から上限値へ向かう方向である。
【0026】
図2に示されるように、回動内機30は、内機本体30a、指針軸30b、及びケーシング30cを備えて構成されている。内機本体30aは、計器板10に略平行な基板40の背面側に配置されている。内機本体30aは、二相式ステップモータM、減速歯車機構G、及びストッパ機構S(図4)を、ケーシング30cに内蔵している。指針軸30bは、基板40の背面に固定されたケーシング30cによって支持されており、基板40及び計器板10を貫通して指針20の基端部21を支持している。内機本体30aは、ステップモータMの回転に連動する減速歯車機構Gの減速回転により、当該減速歯車機構Gの出力段歯車34と同軸上の指針軸30b、ひいては指針20を回転駆動する。
【0027】
図4及び図5に示されるように、ステップモータMは、ステータMs及びマグネットロータMrを組み合わせて構成されている。ステータMsは、ヨーク31及び二相の界磁巻線32及び33を有している。ヨーク31は、ポール状を呈する一対の磁極31a及び31bを有し、磁極31aにはA相の界磁巻線32が巻装される一方、磁極31bにはB相の界磁巻線33が巻装されている。マグネットロータMrは、減速歯車機構Gの回転軸35aに同軸上に固定されている。ヨーク31の各磁極31a及び31bの先端面との間に隙間をあけるマグネットロータMrの外周面には、磁極としてのN極及びS極が回転方向において交互に形成されている。
【0028】
このような構成を有するステップモータMにおいては、図6に示されるように、電気角に応じて電圧が余弦関数状に交番する交流のA相駆動信号がA相の界磁巻線32に印加される一方、電気角に応じて電圧が正弦関数状に交番する交流のB相駆動信号がB相の界磁巻線33に印加される。このような互いに90度位相のずれたA相及びB相の駆動信号が印加されると、各界磁巻線32及び33に交流磁束が発生し、その発生した交流磁束がヨーク31及びマグネットロータMrの磁極間を通過する。そして、マグネットロータMrは、電気角に応じたA相及びB相の駆動信号の電圧変化に従って回転する。
【0029】
図4に示されるように、減速歯車機構Gは、平歯車からなる複数の歯車34〜37を有している。出力段歯車34は、指針軸30bと同軸上に連結されており、入力段歯車35は、ケーシング30cに支持された回転軸35aに同軸上に固定されている。中間歯車36及び37は、ケーシング30cに固定された回転軸36aにより同軸上に支持されることで、一体に回転可能となっている。そして、中間歯車36は出力段歯車34と噛合しており、中間歯車37は入力段歯車35と噛合している。
【0030】
このように構成されることにより、減速歯車機構Gは、ステップモータMのマグネットロータMrの回転を減速して当該減速回転を指針20へと伝達する。したがって、電気角に応じたA相及びB相の駆動信号の変化に従ってマグネットロータMrの回転位置が変化することにより、指針20の回転位置も変化する。なお、本実施の形態では、電気角を減少させる方向が指針20の帰零方向Xに対応しており、電気角を増大させる方向が指針20の離零方向Yに対応している。
【0031】
また、図4に示されるように、ストッパ機構Sは、当接部材38及びストッパ部材39を有している。当接部材38は、出力段歯車34から突出する短冊板状に形成されており、当該歯車34と一体に回転可能となっている。ストッパ部材39は、ケーシング30cから内部へ突出するL字状に形成されており、当接部材38の回転軌道上において突出側の先端部39aが当接部材38よりも帰零方向Xの対応側に位置している。
【0032】
図7に示されるように、指針20は、帰零方向Xへの回転により当接部材38がストッパ部材39の先端部39aに係止された状態において、零位置から帰零方向Xの所定範囲内となるストッパ位置にて停止するようになっている。本実施の形態では、後述するZPD処理において、ストッパ位置に対応する電気角が零点θ0(0度)として更新設定されるようになっている(図8参照)。ちなみに、ストッパ位置は、メータシステム1の製造時に、指針20の零位置から帰零方向XへステップモータMの電気角に換算して例えば450度の範囲内に設定される。
【0033】
また、メータシステム1は、図3に示されるように、インジケータ51、フラッシャ半導体スイッチ52、ブザー53、ブザー半導体スイッチ54を有するフラッシャ機能部50を備えて構成されている。
【0034】
このうち、インジケータ51は、表示面10a(図1では図示略)に配置されており、フラッシャ半導体スイッチ52を介して制御ユニット60に接続されている。インジケータ51は、フラッシャ半導体スイッチ52がオンとされる場合には、制御ユニット60から電源が供給されて点灯する一方、フラッシャ半導体スイッチ52がオフとされる場合には、制御ユニット60からの電源が遮断されて消灯する。そして、制御ユニット60によってフラッシャ半導体スイッチ52のオンオフが切替制御されることによりインジケータ51は点滅する。
【0035】
また、ブザー53は、ブザー半導体スイッチ54を介して制御ユニット60に接続されている。ブザー53は、ブザー半導体スイッチ54がオンとされる場合には、制御ユニット60から電源が供給されて吹鳴する一方、ブザー半導体スイッチ54がオフとされる場合には、制御ユニット60からの電源が遮断されて吹鳴しない。そして、制御ユニット60によってフラッシャ半導体スイッチ52のオンオフに連動してブザー半導体スイッチ54のオンオフが切替制御されることにより、ブザー53はインジケータ51に連動して吹鳴する。
【0036】
なお、インジケータ51は、図3では便宜上、単一のインジケータとして図示されているが、実際には、車両が右折する旨を示すための図示しない右折用ターンランプの点滅に同期して点滅する右折用インジケータと、車両が左折をする旨示すための図示しない左折用ターンランプの点滅に同期して点滅する左折用インジケータとを有している。また、インジケータ51が特許請求の範囲に記載のフラッシャに相当する。
【0037】
制御ユニット60は、メモリ61を有するマイクロコンピュータを主体に構成されており、基板40に実装されている(図2)。メモリ61には、後述するメータ起動処理(ストッパ位置検出動作、零点設定動作、ZPD処理等を含む)S1を実行するための実行プログラムが記憶されており、メータ起動処理S1が実行されることにより設定(更新)された最新の零点θ0も記憶される。また、メモリ61には、制御ユニット60の起動中にZPD処理が実行された旨を示すZPDフラグの記憶領域が確保されている。
【0038】
制御ユニット60は、フラッシャ機能部50、車両のドアセンサ70、車速センサ71、イグニッションスイッチIG、及びバッテリ電源Bと電気的に接続されている。制御ユニット60は、ドアセンサ70により車両のドアの開放が検出されると、バッテリ電源Bからの直接的な給電によって起動する。また、制御ユニット60は、起動してから設定時間(例えば2分)が経過するまでにイグニッションスイッチIGがオン操作された場合、バッテリ電源Bからの給電によって起動状態を維持するとともに、その後にイグニッションスイッチIGがオフ操作されると、スリープする。一方、制御ユニット60は、起動してから設定時間が経過するまでにイグニッションスイッチIGがオン操作されなかった場合、スリープするとともに、そのスリープ後にイグニッションスイッチIGがオン操作されると、再起動する。なお、スリープ後の再起動については、イグニッションスイッチIGのオン操作がされた場合以外にも、例えば車両ドアが開放された場合や、ブレーキペダルが踏み込まれた場合等としてもよい。また、制御ユニット60は、その起動中にZPD処理を実行した場合にはZPDフラグをセットするとともに、スリープする直前にZPDフラグをリセットする。また、後述するように、制御ユニット60は、その起動時に、バッテリ電源Bから供給される電圧(供給電圧)が所定閾値以上であるか所定閾値よりも低いかを判断することにより、当該起動が「低電圧リセットからの復帰」であるかあるいは「通常起動」であるかを判断する。なお、本実施の形態では、所定閾値として例えば「7[V]」を採用するが、これに限られず「8[V]」や「6[V]」等を採用してもよい。
【0039】
制御ユニット60は、所定のストッパ位置検出動作実行条件が成立した場合、ストッパ位置検出動作を実行する。ここで、ストッパ位置検出動作とは、その概略を説明すると、指針20が一旦離零方向Yへ回転した後、帰零方向Xへ回転するように、ステップモータMの界磁巻線32及び33へ印加するA相及びB相の駆動信号を制御しながら、それら界磁巻線32及び33に発生する誘起電圧を検出し、この検出した誘起電圧を用いて指針20がストッパ位置に停止したことを検出する動作である。なお、このストッパ位置検出動作については公知であるため、ここでの詳しい説明を割愛する。
【0040】
また、ストッパ位置検出動作実行条件は、制御ユニット60が起動することであり、制御ユニット60は、例えば、車両ドアが開放されたり、イグニッションスイッチIGがオン操作されたり、ブレーキペダルが踏み込まれたりすることで起動する。また、制御ユニット60は、上記ストッパ位置検出動作を実行することによって検出したストッパ位置に対応する電気角を零点θ0として設定(更新)する動作である零点設定動作を実行する。したがって、制御ユニット60が特許請求の範囲に記載の零点設定手段に相当する。なお、上記ストッパ位置検出動作及び上記零点設定動作を併せてZPD処理とも記載する。そして、制御ユニット60は、上記ZPD処理を実行することによって設定した零点θ0を基準として、A相及びB相の駆動信号をステップモータMの界磁巻線32及び33へ印加する。また、制御ユニット60が特許請求の範囲に記載のストッパ位置検出動作実行手段、零点設定手段、印加手段、駆動制御部に相当する。
【0041】
制御ユニット60は、上記ZPD処理実行後の起動状態において、メモリ61に記憶されている電気角の零点θ0を基準としたA相及びB相の駆動信号を制御することにより、車速センサ71の検出車速値を指針20に指示させる。
【0042】
また、制御ユニット60は、ユーザの手動操作に基づく所定のフラッシャ駆動条件が成立するか否かを判断し、フラッシャ駆動条件が成立したと判断した場合、その成立したと判断したフラッシャ駆動条件に応じた態様にてフラッシャを点滅させるためにフラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。
【0043】
詳しくは、フラッシャ駆動条件には、例えば、車両が右折する旨を示す右折用ターンランプを点滅させたり、車両が左折する旨を示す左折用ターンランプを点滅させたりする図示しないコンビネーションレバーがターンランプ点滅位置(基準位置から上下方向に所定角度ずれた位置)に設定されていることや、それら右折用ターンランプ及び左折用ターンランプを双方とも点滅させるための図示しないハザードランプスイッチがオン状態に設定されていることが含まれる。
【0044】
そして、制御ユニット60は、右折用ターンランプを点滅させる位置にコンビネーションレバーが設定されると、右折用ターンランプの点滅に連動して右折用インジケータが点滅するとともにブザー53が吹鳴するように、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。同様に、制御ユニット60は、左折用ターンランプを点滅させる位置にコンビネーションレバーが設定されると、左折用ターンランプの点滅に連動して左折用インジケータが点滅するとともにブザー53が吹鳴するように、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。さらに、制御ユニット60は、ハザードランプスイッチがオン状態に設定されると、右折用ターンランプ及び左折用ターンランプ双方の点滅に連動してインジケータ51が点滅するとともにブザー53が吹鳴するように、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。なお、制御ユニット60が特許請求の範囲に記載のフラッシャオンオフ切替制御部及びブザーオンオフ切替制御部に相当する。
【0045】
ここで、本実施の形態のメータシステム1では、ステップモータMを構成する界磁巻線32及び33は基板40上に配置されているとともに、フラッシャ機能部50を構成するフラッシャ半導体スイッチ52及びブザー半導体スイッチ54も同一の基板40上に配置されており、同一の基板40上に配置されている。
【0046】
また、本実施の形態のメータシステム1では、同一の制御ユニット60によって、上記ZPD処理と、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方のオンオフの切替制御とが実行される。
【0047】
このようにして車両用指示計器1aとフラッシャ機能部50とをメータシステム1として統合することにより、車両のシステムコストを低減することができる。そして、界磁巻線32及び33とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54とは近接した状態で配置されている。
【0048】
界磁巻線32及び33とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54とが近接した状態で配置されている場合、ステップモータMの上記ZPD処理の実行時にフラッシャ機能部50が動作すると、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフの切替制御によって発生する誘導ノイズに起因してストッパ位置の誤検知が生じ、ストッパ位置がずれてしまうことがある。そして、ひいては、車速値(車両状態値)の正しい指示ができなくなる不具合が発生する可能性がある。
【0049】
また、ストッパ位置検出動作を実行するには、所定のストッパ位置検出動作実行条件が成立する必要があり、そのストッパ位置検出動作実行条件には、指針20がストッパ位置から離れている可能性が高いことから速やかにストッパ位置検出動作を実行する必要性が高い高必要性実行条件と、指針20がストッパ位置から離れている可能性は低いものの万全を期すために実行する確認的実行条件とがある。高必要性実行条件が成立した場合、ストッパ位置検出動作を実行する必要性が高い一方、確認的実行条件が成立した場合、ストッパ位置検出動作を実行する必要性はそれほど高くない。また、ストッパ位置検出動作が実行されると、車速値を正しく指示することができるようになるものの、ユーザは何ら操作を行っていないのに指針が帰零方向へ回転することからユーザに違和感を与えてしまうことがある。
【0050】
そこで、本実施の形態では、制御ユニット60は、その起動直後に、図8に示すメータ起動処理S1を実行することとした。なお、ストッパ位置検出動作実行条件は制御ユニット60が起動することであることは既述の通りである。そのため、制御ユニット60が起動した時点で上記ストッパ位置検出動作実行条件が成立する。
【0051】
制御ユニット60がその起動直後にメータ起動処理S1を実行開始すると、まず、ステップS11の判断処理として、バッテリ電源Bの供給電圧が所定閾値以上であるか所定閾値よりも低いかを判断することにより、「低電圧リセットからの復帰」であるか否かを判断する。
【0052】
ここで、「低電圧リセットからの復帰」について説明する。すなわち、例えばバッテリBの性能が著しく劣化している状況等において、イグニッションスイッチIGがオン操作されると、車両に搭載される各種機器(制御ユニット60を含む)が一時的に起動するのみでその後に動作停止し、その動作停止後に再度イグニッションスイッチIGがオン操作されると、各種機器が正常に起動することがある。
【0053】
詳しくは、イグニッションスイッチIGがオン操作される前においては、各種機器が動作しておらず負荷が軽いことから、バッテリ電源Bの供給電圧が各種機器の動作電圧を上回っており、各種機器は一時的に起動する。この各種機器の起動後においては、各種機器が動作開始して負荷が重くなることから、バッテリ電源Bの供給電圧が低下して各種機器の動作電圧を下回ってしまい、各種機器が動作停止してしまう(低電圧リセット)。
【0054】
ただし、その動作停止後にイグニッションスイッチIGがオン操作されると、バッテリ電源Bの供給電圧が上昇して各種機器の動作電圧を再度上回り、動作開始する。そして、この際、オルタネータが動作して発電することにより、各種機器が動作を継続することがある(低電圧リセットからの復帰)。
【0055】
このような低電圧リセットからの復帰時には、各種機器がその復帰前に一時的に動作し、指針20をストッパ位置に戻す処理を行わずに動作停止した可能性が高いことから、指針20がストッパ位置から離れている可能性が高く、ストッパ位置検出動作を早急に実行する必要性が高い。
【0056】
一方、例えばバッテリ電源Bの性能がそれほど劣化していない状況において、イグニッションスイッチIGがオン操作されても、上記低電圧リセットされることは少ない。低電圧リセットされていなければ、指針20がストッパ位置に戻す処理が行われて動作停止した可能性が高いことから、指針20がストッパ位置から離れている可能性は低く、ストッパ位置検出動作を実行する必要性が低い。
【0057】
したがって、上記ステップS11の判断処理において、低電圧リセットからの復帰であると判断される場合(ステップS11の判断処理において「Yes」)、上記高必要性実行条件が成立したことを意味する。そしてこの場合、制御ユニット60は、続くステップS12の処理として、(フラッシャ駆動条件の成立・不成立にかかわらず)ZPD処理を実行し、続くステップS13の判断処理に移行する。
【0058】
一方、上記ステップS11の判断処理において、低電圧リセットからの復帰であると判断されない場合(ステップS11の判断処理において「No」)、確認的実行条件が成立したことを意味する。そしてこの場合、制御ユニット60は、ZPD処理を実行することなく、続くステップS13の判断処理に移行する。
【0059】
ステップS13の判断処理に移行すると、制御ユニット60は、フラッシャ駆動条件が成立したか否かを判断する。ここで、フラッシャ駆動条件が成立したと判断された場合(ステップS13の判断処理で「Yes」)、制御ユニット60は、続くステップS14の処理として、その成立したと判断されたフラッシャ駆動条件に応じた態様にてインジケータ51を点滅させるとともにその点滅に連動してブザー53を吹鳴させるために、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御する。これら半導体スイッチ52及び54のオンオフを切替制御すると、制御ユニット60は、このステップS13の判断処理に移行し再度実行する。一方、フラッシャ駆動条件が成立したと判断されなかった場合(ステップS13の判断処理で「No」)、制御ユニット60は、このステップS13の判断処理に移行し再度実行する。
【0060】
このようにして、制御ユニット60は、高必要性実行条件が成立した場合には、(フラッシャ駆動条件の成立・不成立に関わらず)ZPD処理を実行し、ZPD処理を実行している間、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフの切替制御を実行しない。そのため、ストッパ位置検出動作を優先して実行することができるようになる。一方、制御ユニット60は、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御し、これらフラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御している間、ZPD処理を実行しない。そのため、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフの切替制御を優先して実行することができるようになる。
【0061】
また、制御ユニット60は、高必要性実行条件が成立した場合であっても、確認的実行条件が成立した場合であっても、ZPD処理とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフの切替制御とを同時に実行しない。そのため、ストッパ位置検出動作によって検出されるストッパ位置は、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフによって発生する誘導ノイズの影響を受けず、制御ユニット60によって誘導ノイズの影響を受けた可能性の低いストッパ位置に対応する電気角が零点θ0として設定されるようになる。そして、不正確な零点θ0が駆動信号の基準となる可能性が低くなることから、車速値(車両状態値)の不正確な指示が発生することを低減することができるようになる。
【0062】
以上説明したように、メータシステム1によれば、システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザに違和感を与えることをより低減することができるようになる。
【0063】
なお、本発明に係るメータシステム1は、上記実施の形態にて例示した構成に限定されるものではなく、本発明の趣旨を逸脱しない範囲において、種々に変形して実施することが可能である。すなわち、上記実施の形態を適宜変更した例えば次の形態として実施することもできる。
【0064】
上記実施の形態のメータシステム1では、高必要性実行条件は成立していない(すなわち確認的実行条件が成立している)場合にはZPD処理を実行しない上記メータ起動処理S1(図8)を実行していたがこれに限らず、図8に対応する図として図9に示すメータ起動処理S1aを実行することとしてもよい。具体的には、ステップS13の判断処理において、フラッシャ駆動条件が成立したと判断されなかった場合(ステップS13の判断処理で「No」)、高必要性実行条件は成立していないものの、確認的実行条件が成立していることを意味する。そこで、制御ユニット60は、先のステップS13の判断処理において、フラッシャ駆動条件が成立したと判断されなかった場合(ステップS13の判断処理で「No」)、続くステップS15の判断処理として、メモリ61に記憶されているZPDフラグがセットされているかリセットされているかを判断することにより、ZPD処理は実行済みであるか否かを判断する。ここで、ZPDフラグがリセットされておりZPD処理は実行済みであると判断されなかった場合(ステップS15の判断処理で「No」)、制御ユニット60は、続くステップS16の処理として、ZPD処理を実行する。一方、ZPDフラグがセットされておりZPD処理は実行済みである判断された場合、制御ユニット60は、先のステップS13の判断処理に移行し、このステップS13の判断処理を再度実行する。
【0065】
上記実施の形態のメータシステム1では、界磁巻線32及び33の双方とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方とが同一の基板40上に配置された構成であるとともに、同一の制御ユニット60によって上記ZPD処理とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方のオンオフ切替制御とが実行される構成であるが、これに限らない。界磁巻線32及び33の双方とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方とが同一の基板40上に配置された構成であるが、上記ZPD処理を行う制御ユニットと上記半導体スイッチ52及び54の双方のオンオフ切替制御を行う制御ユニットとが別の制御装置である構成としてもよく、同一の制御ユニット60によって上記ZPD処理とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方のオンオフの切替制御とが実行される構成であるが、界磁巻線32及び33の双方とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方とが同一の基板上に配置されていない構成としてもよい。
【0066】
また、界磁巻線32及び33の双方とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方とが同一の基板40上に配置された構成に限らず、界磁巻線32及び33のいずれか一方のみとフラッシャ半導体スイッチ52及びブザー半導体スイッチ54のいずれか一方のみとが同一の基板40上に配置された構成としてもよい。
【0067】
また、制御ユニット60によって上記ZPD処理とフラッシャ半導体スイッチ52及びブザー半導体スイッチ54の双方のオンオフの切替制御との少なくとも一方が実行される構成としてもよい。
【符号の説明】
【0068】
1…メータシステム、1a…車両用指示計器、10…計器板、10a…表示板、20…指針、30…回動内機、30a…内機本体、32,33…界磁巻線、40…基板、50…フラッシャ機能部、51…インジケータ(フラッシャ)、52…フラッシャ半導体スイッチ、53…ブザー、54…ブザー半導体スイッチ、60…制御ユニット(制御装置)、61…メモリ、71…ドアセンサ、71…車速センサ、G…減速歯車機構、M…ステップモータ、S…ストッパ機構、X…帰零方向、Y…離零方向、θ0…零点
【特許請求の範囲】
【請求項1】
車両状態値を表示する目盛板の表示面に沿って回転することにより前記車両状態値を回転位置に応じて指示する指針と、
電気角に応じて交番する駆動信号が界磁巻線に印加されることにより前記指針を回転駆動するステップモータと、
帰零方向へ回転する前記指針を、前記車両状態値の零値を指示する零位置から前記帰零方向の所定範囲内となるストッパ位置に停止させるストッパ機構と、
所定のストッパ位置検出動作実行条件が成立したことに基づいて、前記指針が前記帰零方向へ回転するように前記駆動信号を制御しながら前記界磁巻線に発生する誘起電圧を検出し、この検出した誘起電圧を用いて前記指針が前記ストッパ位置にて停止したことを検出するストッパ位置検出動作を実行するストッパ位置検出動作実行手段と、前記ストッパ位置検出動作を実行することによって検出したストッパ位置に対応する電気角を零点として設定する零点設定手段と、前記零点設定手段によって設定された前記零点を基準とした前記駆動信号を前記界磁巻線に印加する印加手段とを含む駆動制御部と、を有する車両用指示計器を備えるとともに、
フラッシャ半導体スイッチと、
前記フラッシャ半導体スイッチのオンオフが切替制御されることにより点滅するフラッシャと、
ユーザの手動操作に基づく所定のフラッシャ駆動条件が成立するか否かを判断し、前記フラッシャ駆動条件が成立したと判断した場合、その成立したと判断したフラッシャ駆動条件に応じた態様にて前記フラッシャを点滅させるために前記フラッシャ半導体スイッチのオンオフを切替制御するフラッシャオンオフ切替制御部と、を有するフラッシャ機能部を備えるメータシステムであって、
前記駆動制御部は、前記ストッパ位置検出動作実行条件として、前記ストッパ位置検出動作を速やかに実行する必要性が高い高必要性実行条件と、前記ストッパ位置検出動作を速やかに実行する必要性が低い確認的実行条件とを有し、
前記フラッシャ半導体スイッチと前記界磁巻線とは近接した状態で配置されており、
前記高必要性実行条件が成立したと判断された場合には、前記駆動制御部は、前記フラッシャ駆動条件の成立・不成立にかかわらず前記ストッパ位置検出動作を実行し、前記フラッシャオンオフ切替制御部は、前記駆動制御部によって前記ストッパ位置検出動作が実行されている間、前記フラッシャ半導体スイッチのオンオフの切替制御を実行しない一方、
前記確認的実行条件及び前記フラッシャ駆動条件が同時に成立していると判断された場合には、前記フラッシャオンオフ切替制御部は、前記フラッシャ半導体スイッチのオンオフを切替制御し、前記駆動制御部は、前記フラッシャ半導体スイッチのオンオフが切替制御されている間、前記ストッパ位置検出動作を実行しないことを特徴とするメータシステム。
【請求項2】
車両状態値を表示する目盛板の表示面に沿って回転することにより前記車両状態値を回転位置に応じて指示する指針と、
電気角に応じて交番する駆動信号が界磁巻線に印加されることにより前記指針を回転駆動するステップモータと、
帰零方向へ回転する前記指針を、前記車両状態値の零値を指示する零位置から前記帰零方向の所定範囲内となるストッパ位置に停止させるストッパ機構と、
所定のストッパ位置検出動作実行条件が成立したことに基づいて、前記指針が前記帰零方向へ回転するように前記駆動信号を制御しながら前記界磁巻線に発生する誘起電圧を検出し、この検出した誘起電圧を用いて前記指針が前記ストッパ位置にて停止したことを検出するストッパ位置検出動作を実行するストッパ位置検出動作実行手段と、前記ストッパ位置検出動作を実行することによって検出したストッパ位置に対応する電気角を零点として設定する零点設定手段と、前記零点設定手段によって設定された前記零点を基準とした前記駆動信号を前記界磁巻線に印加する印加手段とを含む駆動制御部と、を有する車両用指示計器を備えるとともに、
フラッシャ半導体スイッチと、
前記フラッシャ半導体スイッチのオンオフが切替制御されることにより点滅するフラッシャと、
ユーザの手動操作に基づく所定のフラッシャ駆動条件が成立するか否かを判断し、前記フラッシャ駆動条件が成立したと判断した場合、その成立したと判断したフラッシャ駆動条件に応じた態様にて前記フラッシャを点滅させるために前記フラッシャ半導体スイッチのオンオフを切替制御するフラッシャオンオフ切替制御部と、
ブザー半導体スイッチと、
前記ブザー半導体スイッチのオンオフが切替制御されることにより吹鳴するブザーと、
前記フラッシャ半導体スイッチのオンオフに連動して前記ブザー半導体スイッチのオンオフを切替制御するブザーオンオフ切替制御部と、を有するフラッシャ機能部を備えるメータシステムであって、
前記駆動制御部は、前記ストッパ位置検出動作実行条件として、前記ストッパ位置検出動作を速やかに実行する必要性が高い高必要性実行条件と、前記ストッパ位置検出動作を速やかに実行する必要性が低い確認的実行条件とを有し、
前記フラッシャ半導体スイッチ及び前記ブザー半導体スイッチの少なくともいずれか一方と前記界磁巻線とは近接した状態で配置されており、
前記高必要性実行条件が成立したと判断された場合には、前記駆動制御部は、前記フラッシャ駆動条件の成立・不成立にかかわらず前記ストッパ位置検出動作を実行し、前記フラッシャオンオフ切替制御部及び前記ブザーオンオフ切替制御部は、前記駆動制御部によって前記ストッパ位置検出動作が実行されている間、前記フラッシャ半導体スイッチ及び前記ブザー半導体スイッチのうち前記界磁巻線に近接した状態で配置された半導体スイッチのオンオフを切替制御しない一方、
前記フラッシャ駆動条件及び前記確認的実行条件が同時に成立していると判断された場合には、前記フラッシャオンオフ切替制御部及び前記ブザーオンオフ切替制御部は、前記フラッシャ半導体スイッチ及び前記ブザー半導体スイッチのオンオフを切替制御し、前記駆動制御部は、前記フラッシャ半導体スイッチ及び前記ブザー半導体スイッチのうち前記界磁巻線に近接した状態で配置された半導体スイッチのオンオフが切替制御されている間、前記ストッパ位置検出動作を実行しないことを特徴とするメータシステム。
【請求項3】
請求項1または2に記載のメータシステムにおいて、
前記高必要性実行条件は、前記駆動制御部への供給電圧が所定閾値よりも低い状態で当該駆動制御部が起動したことであることを特徴とするメータシステム。
【請求項4】
請求項1〜3のいずれか一項に記載のメータシステムにおいて、
前記確認的実行条件は、前記駆動制御部への供給電圧が所定閾値以上の状態で当該駆動制御部が起動したことであることを特徴とするメータシステム。
【請求項1】
車両状態値を表示する目盛板の表示面に沿って回転することにより前記車両状態値を回転位置に応じて指示する指針と、
電気角に応じて交番する駆動信号が界磁巻線に印加されることにより前記指針を回転駆動するステップモータと、
帰零方向へ回転する前記指針を、前記車両状態値の零値を指示する零位置から前記帰零方向の所定範囲内となるストッパ位置に停止させるストッパ機構と、
所定のストッパ位置検出動作実行条件が成立したことに基づいて、前記指針が前記帰零方向へ回転するように前記駆動信号を制御しながら前記界磁巻線に発生する誘起電圧を検出し、この検出した誘起電圧を用いて前記指針が前記ストッパ位置にて停止したことを検出するストッパ位置検出動作を実行するストッパ位置検出動作実行手段と、前記ストッパ位置検出動作を実行することによって検出したストッパ位置に対応する電気角を零点として設定する零点設定手段と、前記零点設定手段によって設定された前記零点を基準とした前記駆動信号を前記界磁巻線に印加する印加手段とを含む駆動制御部と、を有する車両用指示計器を備えるとともに、
フラッシャ半導体スイッチと、
前記フラッシャ半導体スイッチのオンオフが切替制御されることにより点滅するフラッシャと、
ユーザの手動操作に基づく所定のフラッシャ駆動条件が成立するか否かを判断し、前記フラッシャ駆動条件が成立したと判断した場合、その成立したと判断したフラッシャ駆動条件に応じた態様にて前記フラッシャを点滅させるために前記フラッシャ半導体スイッチのオンオフを切替制御するフラッシャオンオフ切替制御部と、を有するフラッシャ機能部を備えるメータシステムであって、
前記駆動制御部は、前記ストッパ位置検出動作実行条件として、前記ストッパ位置検出動作を速やかに実行する必要性が高い高必要性実行条件と、前記ストッパ位置検出動作を速やかに実行する必要性が低い確認的実行条件とを有し、
前記フラッシャ半導体スイッチと前記界磁巻線とは近接した状態で配置されており、
前記高必要性実行条件が成立したと判断された場合には、前記駆動制御部は、前記フラッシャ駆動条件の成立・不成立にかかわらず前記ストッパ位置検出動作を実行し、前記フラッシャオンオフ切替制御部は、前記駆動制御部によって前記ストッパ位置検出動作が実行されている間、前記フラッシャ半導体スイッチのオンオフの切替制御を実行しない一方、
前記確認的実行条件及び前記フラッシャ駆動条件が同時に成立していると判断された場合には、前記フラッシャオンオフ切替制御部は、前記フラッシャ半導体スイッチのオンオフを切替制御し、前記駆動制御部は、前記フラッシャ半導体スイッチのオンオフが切替制御されている間、前記ストッパ位置検出動作を実行しないことを特徴とするメータシステム。
【請求項2】
車両状態値を表示する目盛板の表示面に沿って回転することにより前記車両状態値を回転位置に応じて指示する指針と、
電気角に応じて交番する駆動信号が界磁巻線に印加されることにより前記指針を回転駆動するステップモータと、
帰零方向へ回転する前記指針を、前記車両状態値の零値を指示する零位置から前記帰零方向の所定範囲内となるストッパ位置に停止させるストッパ機構と、
所定のストッパ位置検出動作実行条件が成立したことに基づいて、前記指針が前記帰零方向へ回転するように前記駆動信号を制御しながら前記界磁巻線に発生する誘起電圧を検出し、この検出した誘起電圧を用いて前記指針が前記ストッパ位置にて停止したことを検出するストッパ位置検出動作を実行するストッパ位置検出動作実行手段と、前記ストッパ位置検出動作を実行することによって検出したストッパ位置に対応する電気角を零点として設定する零点設定手段と、前記零点設定手段によって設定された前記零点を基準とした前記駆動信号を前記界磁巻線に印加する印加手段とを含む駆動制御部と、を有する車両用指示計器を備えるとともに、
フラッシャ半導体スイッチと、
前記フラッシャ半導体スイッチのオンオフが切替制御されることにより点滅するフラッシャと、
ユーザの手動操作に基づく所定のフラッシャ駆動条件が成立するか否かを判断し、前記フラッシャ駆動条件が成立したと判断した場合、その成立したと判断したフラッシャ駆動条件に応じた態様にて前記フラッシャを点滅させるために前記フラッシャ半導体スイッチのオンオフを切替制御するフラッシャオンオフ切替制御部と、
ブザー半導体スイッチと、
前記ブザー半導体スイッチのオンオフが切替制御されることにより吹鳴するブザーと、
前記フラッシャ半導体スイッチのオンオフに連動して前記ブザー半導体スイッチのオンオフを切替制御するブザーオンオフ切替制御部と、を有するフラッシャ機能部を備えるメータシステムであって、
前記駆動制御部は、前記ストッパ位置検出動作実行条件として、前記ストッパ位置検出動作を速やかに実行する必要性が高い高必要性実行条件と、前記ストッパ位置検出動作を速やかに実行する必要性が低い確認的実行条件とを有し、
前記フラッシャ半導体スイッチ及び前記ブザー半導体スイッチの少なくともいずれか一方と前記界磁巻線とは近接した状態で配置されており、
前記高必要性実行条件が成立したと判断された場合には、前記駆動制御部は、前記フラッシャ駆動条件の成立・不成立にかかわらず前記ストッパ位置検出動作を実行し、前記フラッシャオンオフ切替制御部及び前記ブザーオンオフ切替制御部は、前記駆動制御部によって前記ストッパ位置検出動作が実行されている間、前記フラッシャ半導体スイッチ及び前記ブザー半導体スイッチのうち前記界磁巻線に近接した状態で配置された半導体スイッチのオンオフを切替制御しない一方、
前記フラッシャ駆動条件及び前記確認的実行条件が同時に成立していると判断された場合には、前記フラッシャオンオフ切替制御部及び前記ブザーオンオフ切替制御部は、前記フラッシャ半導体スイッチ及び前記ブザー半導体スイッチのオンオフを切替制御し、前記駆動制御部は、前記フラッシャ半導体スイッチ及び前記ブザー半導体スイッチのうち前記界磁巻線に近接した状態で配置された半導体スイッチのオンオフが切替制御されている間、前記ストッパ位置検出動作を実行しないことを特徴とするメータシステム。
【請求項3】
請求項1または2に記載のメータシステムにおいて、
前記高必要性実行条件は、前記駆動制御部への供給電圧が所定閾値よりも低い状態で当該駆動制御部が起動したことであることを特徴とするメータシステム。
【請求項4】
請求項1〜3のいずれか一項に記載のメータシステムにおいて、
前記確認的実行条件は、前記駆動制御部への供給電圧が所定閾値以上の状態で当該駆動制御部が起動したことであることを特徴とするメータシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−95175(P2011−95175A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−251190(P2009−251190)
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月30日(2009.10.30)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]