
モアレ縞を使った変位計測方法
【課題】コンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象とし、離れた地点から画像撮影することで高い精度を確保し、安全、簡単かつ迅速な計測を可能とするモアレ縞を利用した変位計測方法を提供する。
【解決手段】モアレ縞を利用して2地点間の微小な相対変位を計測するモアレ縞を使った変位計測方法であって、計測対象に沿うように設置され相互に重ねられた2枚の板状の部品からなる計測装置10の2枚の板状の部品のそれぞれに、空間的に周期構造をもつ格子を表示し、格子同士の光学的な干渉により生じるモアレ縞の移動量を読み取ることで計測対象の変位を計測する。
【解決手段】モアレ縞を利用して2地点間の微小な相対変位を計測するモアレ縞を使った変位計測方法であって、計測対象に沿うように設置され相互に重ねられた2枚の板状の部品からなる計測装置10の2枚の板状の部品のそれぞれに、空間的に周期構造をもつ格子を表示し、格子同士の光学的な干渉により生じるモアレ縞の移動量を読み取ることで計測対象の変位を計測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モアレ縞を使った変位計測方法に関するもので、さらに詳しくは、コンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象とし、モアレ縞を使って離れた地点から計測対象の微小な相対変位を画像撮影により計測するような変位計測方法に関する。
【背景技術】
【0002】
トンネルや橋梁などのコンクリート構造物や鋼構造物では、想定外の荷重や地盤の変位によってひびわれや目地などの間隔が経時的に変化することがある。また、土構造物、亀裂性の岩盤や地すべり斜面の地盤などでは、特定の岩塊あるいは斜面全体が不安定になる兆候として亀裂が進展したり、地盤が移動することがある。このように建設分野においては、構造物の維持、管理、あるいは岩盤や地盤の安定性を評価するなどの目的で、ひびわれに代表される2点間の相対変位を長期間に亘り定期に定点観測を行う場合が数多くある。
【0003】
従来、高い精度を要求される計測では、ひずみゲージや伸縮計などのセンサーを用いた電子回路や機械による計測装置により自動計測が行われているが、一般に機材が高価であり、測定レンジが狭いなどの欠点がある。
【0004】
また、簡易な計測では、計測箇所に目印をつけておいて、その都度クラックスケールやクラックゲージなどを用いて手作業により現場計測が行われているが、計測精度やばらつきの測定者依存性が強く、また測定者が計測個所のごく近傍まで寄らないと計測できないことから、現場状況によっては作業に危険を伴ったり、作業効率が低くなる等の欠点がある。
【0005】
これに対し、デジタルカメラなどで撮影した画像を基に変位を計測する方法が近年数多く開発されている。例えば、特開2002−340529号公報(特許文献1)には、デジタルカメラを用いた構造物の亀裂変位計測方法が開示されている。また、特開平11−173839号公報(特許文献2)には、構築物等の変形状態解析装置とこれに用いるデータアナライザが開示されている。
【0006】
しかし、これらの方法では、画像の画素数を数えることで距離を直接計測することを基本原理としているものが多い。従って、撮影した画像の画角と画素数から求まる1画素あたりの実距離が最小分解能となるため、現在一般に市販されているデジタルカメラの画素数では、10〜数10cmの近接した距離から撮影しても1画素あたりの分解能は、0.05〜0.1mm程度が限界となってしまう。例えばコンクリート構造物のひびわれなどにおいては、0.1mmオーダーでの計測を必要する場合が多いことから、これらの方法を用いても測定者は計測地点のごく近傍まで寄る必要がある。またその原理から1画素あたりの実距離よりも小さな変位を計測することは難しい。
【0007】
また、モアレを利用して遠距離から変位を計測する方法も開発されている。例えば、特開平10−82614号公報(特許文献3)には、モアレ縞を使った微小変位計測装置が開示されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】 特開2002−340529号公報
【特許文献2】 特開平11−173839号公報
【特許文献3】 特開平10−82614号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしこの方法では、観測地点に実体格子を設置しておき、別途ソフトウェア的に作成した参照格子を重ね合せてモアレ縞画像を生じさせるものである。このように作成した過去と現在のモアレ縞画像を比較することでモアレ縞の移動量から変位を計測しているため、完全に固定された位置から同じ画角と解像度で撮影しなければ計測を行うことは難しい。
【0010】
そこで、本発明は、上記のような背景を基になされたもので、その技術的課題とするところは、コンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象とし、離れた地点から画像撮影することで、高い精度を確保し、安全、簡単かつ迅速な計測を可能とするモアレ縞を利用した変位計測方法を提供することにある。
【課題を解決するための手段】
【0011】
請求項1に記載の発明は、モアレ縞を利用して2地点間の微小な相対変位を計測するモアレ縞を使った変位計測方法であって、計測対象に沿うように設置され相互に重ねられた2枚の板状の部品からなる計測装置の2枚の板状の部品のそれぞれに、空間的に周期構造をもつ格子を表示し、格子同士の光学的な干渉により生じるモアレ縞の移動量を読み取ることで計測対象の変位を計測することを特徴とする。
【0012】
請求項2に記載の発明は、請求項1記載のモアレ縞を使った変位計測方法において、前記モアレ縞は、前記計測装置の2枚の板状の部品のそれぞれに互いに異なる格子を表示することによって、格子同士の光学的な干渉により生じるモアレ縞の移動量を、実際の計測対象の変位に対して任意の拡大倍率で表示することを特徴とする。
【0013】
請求項3に記載の発明は、請求項2に記載のモアレ縞を使った変位計測方法において、前記計測装置を離れた地点から撮影装置で撮影し、処理装置により撮影角度の傾きに起因する画像データの歪みを幾何補正し、補正した画像データから前記計測装置のモアレ縞の移動量をパターンマッチングにより読み取り、モアレ縞の移動量を前記拡大倍率で除することで計測対象の変位を計測することを特徴とする。
【0014】
詳細には、本発明は、計測対象に設置する計測装置と、この計測装置を離れた地点から撮影するデジタルカメラなどの撮影装置と、撮影した画像データの歪みを幾何補正し、幾何補正した画像データからモアレ縞の移動量を読み取り、計測対象の変位を算出するコンピューターとソフトウェアなどからなる処理装置と、から構成されている。
【0015】
計測装置は、2枚の板状の部品からなり、ひびわれなどの計測対象の前方に固定して設置する。2枚の板状の部品それぞれには、空間的に周期構造をもつ格子を表示してあり、格子同士の光学的な干渉によりモアレ縞が生じている。具体的には、平行する間隔の異なる二つの直線格子(以降”平行格子”と呼ぶ)、あるいは互いに傾斜した同じ間隔の二つの直線格子(以降”傾斜格子”と呼ぶ)が光学的に干渉することで明暗パターンからなるモアレ縞を生じる現象を利用して、計測対象の変位を任意の拡大倍率でモアレ縞の移動量として表示させることを特徴としている。ここで計測対象の変位に対するモアレ縞の移動量の拡大倍率は、格子間隔や傾斜角をパラメータとして任意に設定することが可能である。
【0016】
このような原理によって計測対象の変位をモアレ縞の移動量として拡大表示している計測装置の表示部を、離れた地点からデジタルカメラなどの撮影装置により、画像撮影することで計測を行う。このように離れた地点からの計測では、計測装置の表示部がなす平面に対して完全に直交する方向から撮影することは難しいので、撮影角度の傾きに起因して、計測装置の表示部は本来の長方形から台形状に歪んだ画像データとして記録されることとなる。
【0017】
歪んだ画像データからモアレ縞の移動量を正確に読み取ることはできないので、画像データをコンピューターとソフトウェアなどからなる処理装置により、本来の長方形の形状に幾何補正を行う。モアレ縞がなす明暗パターンは既知の周期を持つことを利用して、処理装置により補正した画像データと理論パターンとをマッチングさせることでモアレ縞の移動量を読み取り、この移動量を変位に対する拡大倍率で除することによって最終的に計測対象の変位を求める。
【0018】
この計測方法による最終的な計測精度は、計測装置の拡大倍率、撮影時の明るさ、撮影装置の感度と撮影した画像の解像度、処理装置におけるモアレ移動量の読み取り誤差、などをはじめとする様々な要因から総合的に決定されるものであるが、モアレ縞の明暗パターンを認識できる解像度での撮影画像であれば、格子を構成する個々の線分同士を分離識別できる解像度でなくても計測可能である。
【0019】
これに加え、計測対象の変位をモアレ縞の移動量として大きく拡大表示しているため、従来の方法では不可能であった画像の1画素あたりの実距離よりも小さい変位を計測することが原理的に可能となっている。上述したさまざまな要因により変化するものの、一般的な条件下であれば、1画素あたりの実距離の1/10程度の精度での計測は十分に可能である。従って、例えば計測対象が高所や危険な場所などにおいては、高解像度すなわち画素数の多いデジタルカメラと望遠レンズを用いることなどにより、計測装置から10m(メートル)以上離れた場所からでも、0.05mm程度の精度を確保した計測が可能である。
【発明の効果】
【0020】
本発明によれば、例えばトンネルや橋梁などのコンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象として、離れた地点から画像撮影することで、計測精度やばらつきの測定者依存性を排し、高い精度を確保した計測が可能となる。
【0021】
また、撮影した画像データを幾何補正した後にモアレ変位量を読み取り、最終的に計測対象の変位を求めることから、計測装置の表示部がなす平面に対して完全に直交する方向以外からでも計測することができる。さらに計測装置より離れた地点からの画像撮影にて計測ができることから、高所や危険な場所などにおいても安全、簡単かつ迅速に計測を行うことができる。
【図面の簡単な説明】
【0022】
【図1】 本発明の実施形態を示すブロック図である。
【図2】 本発明の計測装置を構成する上板と下板の正面図である。
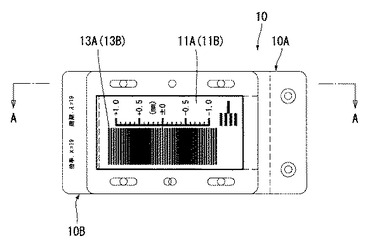
【図3】 本発明の計測装置を構成する上板と下板が相互に重ね合わされた状態の正面図である。
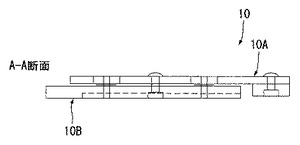
【図4】 図3のA−A間で切断した図である。
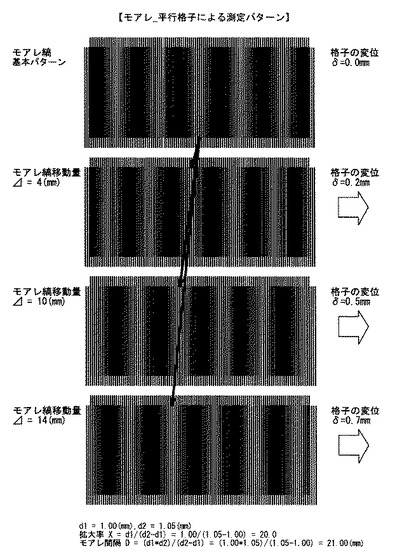
【図5】 平行する間隔の異なる二つの直線格子(平行格子)がなすモアレ縞により変位量を任意の倍率に拡大する原理を示す図である。
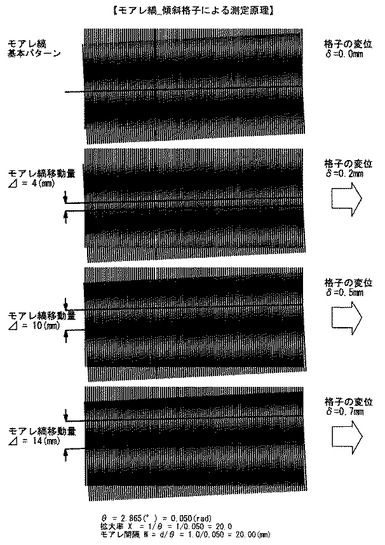
【図6】 互いに傾斜する同じ間隔の二つの直線格子(傾斜格子)がなすモアレ縞により変位量を任意の倍率に拡大する原理を示す図である。
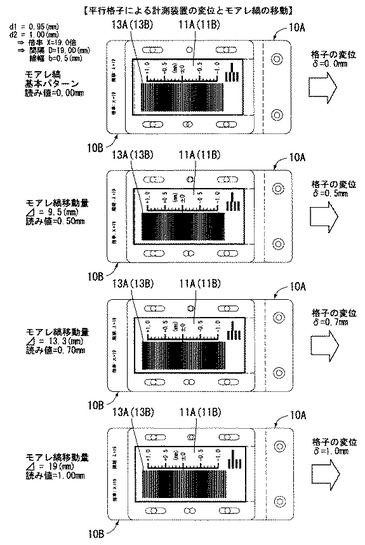
【図7】 平行格子を利用した計測装置の変位とモアレ縞移動の一例を示す図である。
【図8】 撮影した画像を幾何補正し、パターンマッチングにより変位量を読み取る一例を示す図である。
【発明を実施するための形態】
【0023】
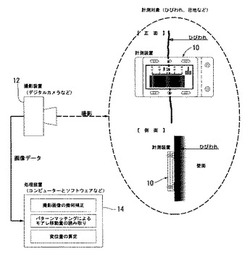
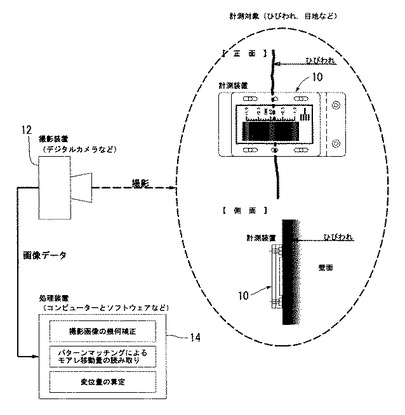
図1は、この発明の実施形態を示すブロック図であり、この発明は計測対象に設置する計測装置10と、この計測装置10の表示部を離れた地点から撮影するデジタルカメラなどの撮影装置12と、撮影した画像データの歪みを幾何補正し、補正した画像データからモアレ縞の移動量を読み取り、計測対象の変位を算出するコンピューターとソフトウェアなどからなる処理装置14と、から構成されている。
【0024】
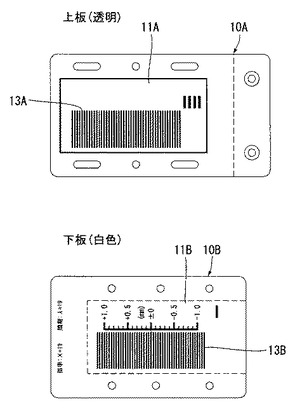
図2、図3及び図4に示すように、計測装置10は、相互に重ね合わせられる2枚の板状の部品10A、10B(上板10A、下板10Bという)からなり、ひびわれなどの計測対象に沿うようにして固定して設置する(図1参照)。2枚の板状の部品10A、10Bの各表示部11A、11Bには、空間的に周期構造をもつ格子13A、13Bが表示されており、重ね合わされた格子13A、13B同士が光学的に干渉することで明暗パターンからなるモアレ縞を生じる現象を利用して、計測対象の変位をモアレ縞の移動量として拡大表示させる。なお、図3は、部品10A、10B(上板13A、下板13B)が相互に重ね合わせられた状態の正面図を示す。
【0025】
2つの格子13A、13Bによるモアレ縞の生成は、平行する間隔の異なる2つの直線格子による方法(平行格子、図5参照)、および互いに傾斜した同じ間隔の2つの直線格子による方法(傾斜格子、図6参照)があり、変位量に対するモアレ縞の移動量の拡大倍率は、格子間隔や傾斜角をパラメータとして任意に設定することが可能である。
【0026】
平行格子(図5参照)による方法では、それぞれの直線格子の間隔をd1、d2(>d1)とすると、変位の拡大倍率Xおよびモアレ縞の周期Dは、次式により算出することができる。
【0027】
変位の拡大倍率:X=d1/(d2−d1)
モアレ縞の周期:D=d1×d2/(d2−d1)
【0028】
ここで、d2=1.0mm、拡大倍率X=9〜50の代表的な倍率に対する各パラメータの関係を表1に示している。この表から拡大倍率X=10、20、25、50とすると非常に高い加工精度が要求されるため、X=9、19、24、49などとした方が加工は容易となる。
【0029】
【表1】

【0030】
また、傾斜格子(図6参照)による方法では、直線格子の間隔をd、2つの格子がなす傾きをθとすると、変位の拡大倍率Xおよびモアレ縞の周期Dは、次式により算出することができる。そして、θが小さい場合には、それぞれの式の最終項にて示している近似値で表すことが可能である。
【0031】
変位の拡大倍率:X=1/(2×SIN(θ/2))≒1/θ
モアレ縞の周期:D=d/(2×SIN(θ/2))≒d/θ
【0032】
ここで、拡大倍率X=5〜50の範囲の代表的な倍率に対する各パラメータの関係を表2に示している。
【0033】
【表2】
【0034】
なお、モアレ縞による明暗パターンの作成には、ここで説明した2つの直線格子による方法の他、二方向の直線格子を合成した直交格子による方法、2つの同心円群による方法などもあり、これらも計測目的と必要精度によっては適用可能である。
【0035】
このようなモアレ縞を利用した計測装置10の構造の一例を、図2、図3及び図4に示している。これらの図のように計測装置は、それぞれに格子を表示した2枚の板状の部品10A、10Bを相互に重ね合わせた形状からなる。上板10Aを通して2つの格子によるモアレ縞を見ることになるため、上板10Aはガラスや合成樹脂など光を透過できる素材が好ましく、下板10Bは計測の際の視認性を良くするために、白色など不透明で明るい色の素材とすることが望ましい。
【0036】
平行格子(図5参照)を利用した計測装置10の変位とモアレ縞移動の一例を、図7に示している。図7は、計測装置10の拡大倍率をX=19とした事例である。
【0037】
ここで、計測対象はトンネル壁面などが想定され一般に平面とは限らないため、計測装置10をあまり大きなサイズとすると、確実に固定、設置することが難しくなる。このため、図7に示した計測装置10の事例では、表示範囲をモアレ縞一周期分としている。このままでは、測定範囲が±モアレ縞一周期分に対応した変位に限られてしまうため、これを解消するために副尺を設けて測定範囲をモアレ縞複数周期分まで拡張している。
【0038】
また、モアレ縞による明暗パターンは格子を構成する直線の線幅によらず発生するが、計測への利用を想定した場合、一般に明暗の差が大きい方がパターンマッチングによる読み取り誤差を小さくすることができる。このため、線幅はある程度の太さを持ち暗部ではほぼ格子により塗りつぶし状態となる方が視認性は向上することから、図7に示した計測装置10の事例では、線幅を格子間隔の約1/2としている。
【0039】
なお、この計測装置10は、2地点間の微小な相対変位を計測するものである。コンクリートや岩盤、地盤などの材料は圧縮強度と比較して引張強度がはるかに弱いため、引っ張りを受ける方向に直交してひびわれが発生する。従って、変位はひびわれに対して直角方向に拡大する場合が多いことから、一般的な計測であれば計測装置10を接着剤などにより固定しても構わない。
【0040】
ただし、複雑な挙動が予測される場合には、二方向の直線格子を合成した直交格子によるモアレ縞、二つの同心円群によるモアレ縞などを使った2方向変位の計測装置が有効である。
【0041】
このような計測装置10によって、計測対象の変位をモアレ縞の移動量として拡大表示している表示部11A、11Bを、離れた地点からデジタルカメラなどの撮影装置12により画像撮影することで計測を行う(上板10Aの表示部11A側から撮影装置12で撮影する)。離れた地点からの計測では、計測装置10(上板10A及び下板10B)の表示部11A、11Bがなす平面に対して完全に直交した方向から撮影することは難しいので、撮影角度の傾きに起因して、計測装置10(上板10A及び下板10B)の表示部11A、11Bは本来の長方形から台形状に歪んだ画像データとして記録されることとなる。
【0042】
歪んだ画像データからモアレ縞の移動量を正確に読み取ることはできないので、画像データをコンピューターとソフトウェアなどからなる処理装置14により、本来の長方形の形状に幾何補正を行う。モアレ縞がなす明暗パターンは、既知の周期を持つことを利用して、処理装置14により補正した画像データを基に理論パターンとマッチングさせることで、モアレ縞の移動量を高い精度で読み取り、この移動量を変位に対する拡大倍率で除することで計測対象の変位を求める。このような計測方法を採用することにより、計測精度やばらつきへの測定者依存性を排除することができる。
【0043】
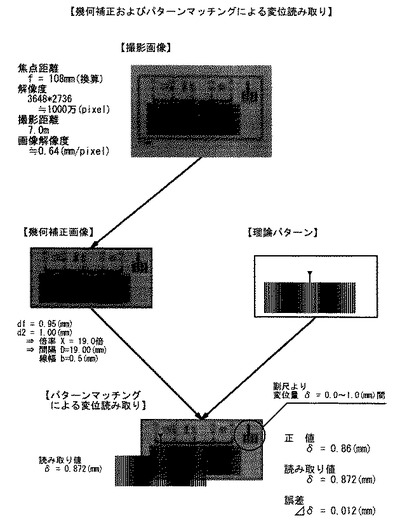
図8に、撮影した画像を幾何補正し、パターンマッチングにより変位量を読み取る一例を示している。
【0044】
この計測方法による最終的な計測精度は、計測装置10の拡大倍率、撮影時の明るさ、撮影装置12の感度と撮影した画像の解像度、処理装置14におけるモアレ移動量の読み取り誤差、などをはじめとする様々な要因から総合的に決定されるものであるが、モアレ縞の明暗パターンを認識できる解像度での撮影画像であれば、格子を構成する個々の線分同士を分離識別できる解像度でなくても計測可能である。
【0045】
これに加え、計測対象の変位をモアレ縞の移動量として大きく拡大表示しているため、従来の方法では不可能であった画像の1画素あたりの実距離よりも小さい変位を計測することが原理的に可能となっている。上述したさまざまな要因により変化するものの、一般的な条件下であれば、1画素あたりの実距離の1/10程度の精度での計測は十分に可能である。従って、例えば計測対象が高所や危険な場所などにおいては、高解像度すなわち画素数の多いデジタルカメラと望遠レンズを用いることなどにより、計測装置10から10m(メートル)以上離れた場所からでも、0.05mm程度の精度を確保した計測が可能である。
【0046】
例えば、35mmフィルムに換算して、焦点距離f=210mm相当の望遠レンズと2400万画素(水平6000×鉛直4000pixel)の高画素のデジタルカメラにより撮影した場合、下表に示した簡略計算による画像解像度は、撮影距離L=10mで0.29mm/pixel、撮影距離L=20mで0.57mm/pixelとなる。
【0047】
これに対し、拡大倍率X=19の計測装置10を配置して、読み取り誤差1pixelを考慮した計測精度は、それぞれ約0.02mm、0.03mmとなり、一般的なひびわれ幅の計測などに対しては充分な計測精度を保持している。
【0048】
以上の試算の結果から、例えば計測地点が高所や危険な場所などにおいては、高画素数のデジタルカメラと望遠レンズを用いることなどにより、計測装置10から数10m(メートル)以上離れた場所からでも十分な精度を確保した計測が可能である。
【0049】
なお、計測装置10の拡大倍率を大きくとると、同じ撮影状況下であれば当然計測精度は向上するが、計測装置10の製造に高い加工精度が必要となりコストが増大する、計測装置10のサイズが大きくなり現地への設置が難しくなる、測定レンジが狭くなる、などの問題が発生するため、この発明の対象と必要精度から、拡大倍率X=40〜50程度までが実用的の上限になると思われる。
【0050】
【表3】
【0051】
なお、撮影した画像データを、コンピューターとソフトウェアなどからなる処理装置14を用いて、幾何補正した後にパターンマッチングにより画像データからモアレ移動量を読み取るため、撮影画像はデジタルカメラなどのデジタル情報であることが望ましい。しかし、フィルムカメラなどによる画像であっても、デジタル変換することで利用することも可能である。
【符号の説明】
【0052】
10 計測装置
10A 部品(上板)
10B 部品(下板)
12 撮影装置
14 処理装置
【技術分野】
【0001】
本発明は、モアレ縞を使った変位計測方法に関するもので、さらに詳しくは、コンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象とし、モアレ縞を使って離れた地点から計測対象の微小な相対変位を画像撮影により計測するような変位計測方法に関する。
【背景技術】
【0002】
トンネルや橋梁などのコンクリート構造物や鋼構造物では、想定外の荷重や地盤の変位によってひびわれや目地などの間隔が経時的に変化することがある。また、土構造物、亀裂性の岩盤や地すべり斜面の地盤などでは、特定の岩塊あるいは斜面全体が不安定になる兆候として亀裂が進展したり、地盤が移動することがある。このように建設分野においては、構造物の維持、管理、あるいは岩盤や地盤の安定性を評価するなどの目的で、ひびわれに代表される2点間の相対変位を長期間に亘り定期に定点観測を行う場合が数多くある。
【0003】
従来、高い精度を要求される計測では、ひずみゲージや伸縮計などのセンサーを用いた電子回路や機械による計測装置により自動計測が行われているが、一般に機材が高価であり、測定レンジが狭いなどの欠点がある。
【0004】
また、簡易な計測では、計測箇所に目印をつけておいて、その都度クラックスケールやクラックゲージなどを用いて手作業により現場計測が行われているが、計測精度やばらつきの測定者依存性が強く、また測定者が計測個所のごく近傍まで寄らないと計測できないことから、現場状況によっては作業に危険を伴ったり、作業効率が低くなる等の欠点がある。
【0005】
これに対し、デジタルカメラなどで撮影した画像を基に変位を計測する方法が近年数多く開発されている。例えば、特開2002−340529号公報(特許文献1)には、デジタルカメラを用いた構造物の亀裂変位計測方法が開示されている。また、特開平11−173839号公報(特許文献2)には、構築物等の変形状態解析装置とこれに用いるデータアナライザが開示されている。
【0006】
しかし、これらの方法では、画像の画素数を数えることで距離を直接計測することを基本原理としているものが多い。従って、撮影した画像の画角と画素数から求まる1画素あたりの実距離が最小分解能となるため、現在一般に市販されているデジタルカメラの画素数では、10〜数10cmの近接した距離から撮影しても1画素あたりの分解能は、0.05〜0.1mm程度が限界となってしまう。例えばコンクリート構造物のひびわれなどにおいては、0.1mmオーダーでの計測を必要する場合が多いことから、これらの方法を用いても測定者は計測地点のごく近傍まで寄る必要がある。またその原理から1画素あたりの実距離よりも小さな変位を計測することは難しい。
【0007】
また、モアレを利用して遠距離から変位を計測する方法も開発されている。例えば、特開平10−82614号公報(特許文献3)には、モアレ縞を使った微小変位計測装置が開示されている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】 特開2002−340529号公報
【特許文献2】 特開平11−173839号公報
【特許文献3】 特開平10−82614号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしこの方法では、観測地点に実体格子を設置しておき、別途ソフトウェア的に作成した参照格子を重ね合せてモアレ縞画像を生じさせるものである。このように作成した過去と現在のモアレ縞画像を比較することでモアレ縞の移動量から変位を計測しているため、完全に固定された位置から同じ画角と解像度で撮影しなければ計測を行うことは難しい。
【0010】
そこで、本発明は、上記のような背景を基になされたもので、その技術的課題とするところは、コンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象とし、離れた地点から画像撮影することで、高い精度を確保し、安全、簡単かつ迅速な計測を可能とするモアレ縞を利用した変位計測方法を提供することにある。
【課題を解決するための手段】
【0011】
請求項1に記載の発明は、モアレ縞を利用して2地点間の微小な相対変位を計測するモアレ縞を使った変位計測方法であって、計測対象に沿うように設置され相互に重ねられた2枚の板状の部品からなる計測装置の2枚の板状の部品のそれぞれに、空間的に周期構造をもつ格子を表示し、格子同士の光学的な干渉により生じるモアレ縞の移動量を読み取ることで計測対象の変位を計測することを特徴とする。
【0012】
請求項2に記載の発明は、請求項1記載のモアレ縞を使った変位計測方法において、前記モアレ縞は、前記計測装置の2枚の板状の部品のそれぞれに互いに異なる格子を表示することによって、格子同士の光学的な干渉により生じるモアレ縞の移動量を、実際の計測対象の変位に対して任意の拡大倍率で表示することを特徴とする。
【0013】
請求項3に記載の発明は、請求項2に記載のモアレ縞を使った変位計測方法において、前記計測装置を離れた地点から撮影装置で撮影し、処理装置により撮影角度の傾きに起因する画像データの歪みを幾何補正し、補正した画像データから前記計測装置のモアレ縞の移動量をパターンマッチングにより読み取り、モアレ縞の移動量を前記拡大倍率で除することで計測対象の変位を計測することを特徴とする。
【0014】
詳細には、本発明は、計測対象に設置する計測装置と、この計測装置を離れた地点から撮影するデジタルカメラなどの撮影装置と、撮影した画像データの歪みを幾何補正し、幾何補正した画像データからモアレ縞の移動量を読み取り、計測対象の変位を算出するコンピューターとソフトウェアなどからなる処理装置と、から構成されている。
【0015】
計測装置は、2枚の板状の部品からなり、ひびわれなどの計測対象の前方に固定して設置する。2枚の板状の部品それぞれには、空間的に周期構造をもつ格子を表示してあり、格子同士の光学的な干渉によりモアレ縞が生じている。具体的には、平行する間隔の異なる二つの直線格子(以降”平行格子”と呼ぶ)、あるいは互いに傾斜した同じ間隔の二つの直線格子(以降”傾斜格子”と呼ぶ)が光学的に干渉することで明暗パターンからなるモアレ縞を生じる現象を利用して、計測対象の変位を任意の拡大倍率でモアレ縞の移動量として表示させることを特徴としている。ここで計測対象の変位に対するモアレ縞の移動量の拡大倍率は、格子間隔や傾斜角をパラメータとして任意に設定することが可能である。
【0016】
このような原理によって計測対象の変位をモアレ縞の移動量として拡大表示している計測装置の表示部を、離れた地点からデジタルカメラなどの撮影装置により、画像撮影することで計測を行う。このように離れた地点からの計測では、計測装置の表示部がなす平面に対して完全に直交する方向から撮影することは難しいので、撮影角度の傾きに起因して、計測装置の表示部は本来の長方形から台形状に歪んだ画像データとして記録されることとなる。
【0017】
歪んだ画像データからモアレ縞の移動量を正確に読み取ることはできないので、画像データをコンピューターとソフトウェアなどからなる処理装置により、本来の長方形の形状に幾何補正を行う。モアレ縞がなす明暗パターンは既知の周期を持つことを利用して、処理装置により補正した画像データと理論パターンとをマッチングさせることでモアレ縞の移動量を読み取り、この移動量を変位に対する拡大倍率で除することによって最終的に計測対象の変位を求める。
【0018】
この計測方法による最終的な計測精度は、計測装置の拡大倍率、撮影時の明るさ、撮影装置の感度と撮影した画像の解像度、処理装置におけるモアレ移動量の読み取り誤差、などをはじめとする様々な要因から総合的に決定されるものであるが、モアレ縞の明暗パターンを認識できる解像度での撮影画像であれば、格子を構成する個々の線分同士を分離識別できる解像度でなくても計測可能である。
【0019】
これに加え、計測対象の変位をモアレ縞の移動量として大きく拡大表示しているため、従来の方法では不可能であった画像の1画素あたりの実距離よりも小さい変位を計測することが原理的に可能となっている。上述したさまざまな要因により変化するものの、一般的な条件下であれば、1画素あたりの実距離の1/10程度の精度での計測は十分に可能である。従って、例えば計測対象が高所や危険な場所などにおいては、高解像度すなわち画素数の多いデジタルカメラと望遠レンズを用いることなどにより、計測装置から10m(メートル)以上離れた場所からでも、0.05mm程度の精度を確保した計測が可能である。
【発明の効果】
【0020】
本発明によれば、例えばトンネルや橋梁などのコンクリート構造物、鋼構造物、土構造物、または岩盤、地盤に発生したひびわれ、亀裂、目地などを対象として、離れた地点から画像撮影することで、計測精度やばらつきの測定者依存性を排し、高い精度を確保した計測が可能となる。
【0021】
また、撮影した画像データを幾何補正した後にモアレ変位量を読み取り、最終的に計測対象の変位を求めることから、計測装置の表示部がなす平面に対して完全に直交する方向以外からでも計測することができる。さらに計測装置より離れた地点からの画像撮影にて計測ができることから、高所や危険な場所などにおいても安全、簡単かつ迅速に計測を行うことができる。
【図面の簡単な説明】
【0022】
【図1】 本発明の実施形態を示すブロック図である。
【図2】 本発明の計測装置を構成する上板と下板の正面図である。
【図3】 本発明の計測装置を構成する上板と下板が相互に重ね合わされた状態の正面図である。
【図4】 図3のA−A間で切断した図である。
【図5】 平行する間隔の異なる二つの直線格子(平行格子)がなすモアレ縞により変位量を任意の倍率に拡大する原理を示す図である。
【図6】 互いに傾斜する同じ間隔の二つの直線格子(傾斜格子)がなすモアレ縞により変位量を任意の倍率に拡大する原理を示す図である。
【図7】 平行格子を利用した計測装置の変位とモアレ縞移動の一例を示す図である。
【図8】 撮影した画像を幾何補正し、パターンマッチングにより変位量を読み取る一例を示す図である。
【発明を実施するための形態】
【0023】
図1は、この発明の実施形態を示すブロック図であり、この発明は計測対象に設置する計測装置10と、この計測装置10の表示部を離れた地点から撮影するデジタルカメラなどの撮影装置12と、撮影した画像データの歪みを幾何補正し、補正した画像データからモアレ縞の移動量を読み取り、計測対象の変位を算出するコンピューターとソフトウェアなどからなる処理装置14と、から構成されている。
【0024】
図2、図3及び図4に示すように、計測装置10は、相互に重ね合わせられる2枚の板状の部品10A、10B(上板10A、下板10Bという)からなり、ひびわれなどの計測対象に沿うようにして固定して設置する(図1参照)。2枚の板状の部品10A、10Bの各表示部11A、11Bには、空間的に周期構造をもつ格子13A、13Bが表示されており、重ね合わされた格子13A、13B同士が光学的に干渉することで明暗パターンからなるモアレ縞を生じる現象を利用して、計測対象の変位をモアレ縞の移動量として拡大表示させる。なお、図3は、部品10A、10B(上板13A、下板13B)が相互に重ね合わせられた状態の正面図を示す。
【0025】
2つの格子13A、13Bによるモアレ縞の生成は、平行する間隔の異なる2つの直線格子による方法(平行格子、図5参照)、および互いに傾斜した同じ間隔の2つの直線格子による方法(傾斜格子、図6参照)があり、変位量に対するモアレ縞の移動量の拡大倍率は、格子間隔や傾斜角をパラメータとして任意に設定することが可能である。
【0026】
平行格子(図5参照)による方法では、それぞれの直線格子の間隔をd1、d2(>d1)とすると、変位の拡大倍率Xおよびモアレ縞の周期Dは、次式により算出することができる。
【0027】
変位の拡大倍率:X=d1/(d2−d1)
モアレ縞の周期:D=d1×d2/(d2−d1)
【0028】
ここで、d2=1.0mm、拡大倍率X=9〜50の代表的な倍率に対する各パラメータの関係を表1に示している。この表から拡大倍率X=10、20、25、50とすると非常に高い加工精度が要求されるため、X=9、19、24、49などとした方が加工は容易となる。
【0029】
【表1】
【0030】
また、傾斜格子(図6参照)による方法では、直線格子の間隔をd、2つの格子がなす傾きをθとすると、変位の拡大倍率Xおよびモアレ縞の周期Dは、次式により算出することができる。そして、θが小さい場合には、それぞれの式の最終項にて示している近似値で表すことが可能である。
【0031】
変位の拡大倍率:X=1/(2×SIN(θ/2))≒1/θ
モアレ縞の周期:D=d/(2×SIN(θ/2))≒d/θ
【0032】
ここで、拡大倍率X=5〜50の範囲の代表的な倍率に対する各パラメータの関係を表2に示している。
【0033】
【表2】
【0034】
なお、モアレ縞による明暗パターンの作成には、ここで説明した2つの直線格子による方法の他、二方向の直線格子を合成した直交格子による方法、2つの同心円群による方法などもあり、これらも計測目的と必要精度によっては適用可能である。
【0035】
このようなモアレ縞を利用した計測装置10の構造の一例を、図2、図3及び図4に示している。これらの図のように計測装置は、それぞれに格子を表示した2枚の板状の部品10A、10Bを相互に重ね合わせた形状からなる。上板10Aを通して2つの格子によるモアレ縞を見ることになるため、上板10Aはガラスや合成樹脂など光を透過できる素材が好ましく、下板10Bは計測の際の視認性を良くするために、白色など不透明で明るい色の素材とすることが望ましい。
【0036】
平行格子(図5参照)を利用した計測装置10の変位とモアレ縞移動の一例を、図7に示している。図7は、計測装置10の拡大倍率をX=19とした事例である。
【0037】
ここで、計測対象はトンネル壁面などが想定され一般に平面とは限らないため、計測装置10をあまり大きなサイズとすると、確実に固定、設置することが難しくなる。このため、図7に示した計測装置10の事例では、表示範囲をモアレ縞一周期分としている。このままでは、測定範囲が±モアレ縞一周期分に対応した変位に限られてしまうため、これを解消するために副尺を設けて測定範囲をモアレ縞複数周期分まで拡張している。
【0038】
また、モアレ縞による明暗パターンは格子を構成する直線の線幅によらず発生するが、計測への利用を想定した場合、一般に明暗の差が大きい方がパターンマッチングによる読み取り誤差を小さくすることができる。このため、線幅はある程度の太さを持ち暗部ではほぼ格子により塗りつぶし状態となる方が視認性は向上することから、図7に示した計測装置10の事例では、線幅を格子間隔の約1/2としている。
【0039】
なお、この計測装置10は、2地点間の微小な相対変位を計測するものである。コンクリートや岩盤、地盤などの材料は圧縮強度と比較して引張強度がはるかに弱いため、引っ張りを受ける方向に直交してひびわれが発生する。従って、変位はひびわれに対して直角方向に拡大する場合が多いことから、一般的な計測であれば計測装置10を接着剤などにより固定しても構わない。
【0040】
ただし、複雑な挙動が予測される場合には、二方向の直線格子を合成した直交格子によるモアレ縞、二つの同心円群によるモアレ縞などを使った2方向変位の計測装置が有効である。
【0041】
このような計測装置10によって、計測対象の変位をモアレ縞の移動量として拡大表示している表示部11A、11Bを、離れた地点からデジタルカメラなどの撮影装置12により画像撮影することで計測を行う(上板10Aの表示部11A側から撮影装置12で撮影する)。離れた地点からの計測では、計測装置10(上板10A及び下板10B)の表示部11A、11Bがなす平面に対して完全に直交した方向から撮影することは難しいので、撮影角度の傾きに起因して、計測装置10(上板10A及び下板10B)の表示部11A、11Bは本来の長方形から台形状に歪んだ画像データとして記録されることとなる。
【0042】
歪んだ画像データからモアレ縞の移動量を正確に読み取ることはできないので、画像データをコンピューターとソフトウェアなどからなる処理装置14により、本来の長方形の形状に幾何補正を行う。モアレ縞がなす明暗パターンは、既知の周期を持つことを利用して、処理装置14により補正した画像データを基に理論パターンとマッチングさせることで、モアレ縞の移動量を高い精度で読み取り、この移動量を変位に対する拡大倍率で除することで計測対象の変位を求める。このような計測方法を採用することにより、計測精度やばらつきへの測定者依存性を排除することができる。
【0043】
図8に、撮影した画像を幾何補正し、パターンマッチングにより変位量を読み取る一例を示している。
【0044】
この計測方法による最終的な計測精度は、計測装置10の拡大倍率、撮影時の明るさ、撮影装置12の感度と撮影した画像の解像度、処理装置14におけるモアレ移動量の読み取り誤差、などをはじめとする様々な要因から総合的に決定されるものであるが、モアレ縞の明暗パターンを認識できる解像度での撮影画像であれば、格子を構成する個々の線分同士を分離識別できる解像度でなくても計測可能である。
【0045】
これに加え、計測対象の変位をモアレ縞の移動量として大きく拡大表示しているため、従来の方法では不可能であった画像の1画素あたりの実距離よりも小さい変位を計測することが原理的に可能となっている。上述したさまざまな要因により変化するものの、一般的な条件下であれば、1画素あたりの実距離の1/10程度の精度での計測は十分に可能である。従って、例えば計測対象が高所や危険な場所などにおいては、高解像度すなわち画素数の多いデジタルカメラと望遠レンズを用いることなどにより、計測装置10から10m(メートル)以上離れた場所からでも、0.05mm程度の精度を確保した計測が可能である。
【0046】
例えば、35mmフィルムに換算して、焦点距離f=210mm相当の望遠レンズと2400万画素(水平6000×鉛直4000pixel)の高画素のデジタルカメラにより撮影した場合、下表に示した簡略計算による画像解像度は、撮影距離L=10mで0.29mm/pixel、撮影距離L=20mで0.57mm/pixelとなる。
【0047】
これに対し、拡大倍率X=19の計測装置10を配置して、読み取り誤差1pixelを考慮した計測精度は、それぞれ約0.02mm、0.03mmとなり、一般的なひびわれ幅の計測などに対しては充分な計測精度を保持している。
【0048】
以上の試算の結果から、例えば計測地点が高所や危険な場所などにおいては、高画素数のデジタルカメラと望遠レンズを用いることなどにより、計測装置10から数10m(メートル)以上離れた場所からでも十分な精度を確保した計測が可能である。
【0049】
なお、計測装置10の拡大倍率を大きくとると、同じ撮影状況下であれば当然計測精度は向上するが、計測装置10の製造に高い加工精度が必要となりコストが増大する、計測装置10のサイズが大きくなり現地への設置が難しくなる、測定レンジが狭くなる、などの問題が発生するため、この発明の対象と必要精度から、拡大倍率X=40〜50程度までが実用的の上限になると思われる。
【0050】
【表3】
【0051】
なお、撮影した画像データを、コンピューターとソフトウェアなどからなる処理装置14を用いて、幾何補正した後にパターンマッチングにより画像データからモアレ移動量を読み取るため、撮影画像はデジタルカメラなどのデジタル情報であることが望ましい。しかし、フィルムカメラなどによる画像であっても、デジタル変換することで利用することも可能である。
【符号の説明】
【0052】
10 計測装置
10A 部品(上板)
10B 部品(下板)
12 撮影装置
14 処理装置
【特許請求の範囲】
【請求項1】
モアレ縞を利用して2地点間の微小な相対変位を計測するモアレ縞を使った変位計測方法であって、計測対象に沿うように設置され相互に重ねられた2枚の板状の部品からなる計測装置の2枚の板状の部品のそれぞれに、空間的に周期構造をもつ格子を表示し、格子同士の光学的な干渉により生じるモアレ縞の移動量を読み取ることで計測対象の変位を計測することを特徴とするモアレ縞を使った変位計測方法。
【請求項2】
前記モアレ縞は、前記計測装置の2枚の板状の部品のそれぞれに互いに異なる格子を表示することによって、格子同士の光学的な干渉により生じるモアレ縞の移動量を、実際の計測対象の変位に対して任意の拡大倍率で表示することを特徴とする請求項1記載のモアレ縞を使った変位計測方法。
【請求項3】
前記計測装置を離れた地点から撮影装置で撮影し、処理装置により撮影角度の傾きに起因する画像データの歪みを幾何補正し、補正した画像データから前記計測装置のモアレ縞の移動量をパターンマッチングにより読み取り、モアレ縞の移動量を前記拡大倍率で除することで計測対象の変位を計測することを特徴とする請求項2に記載のモアレ縞を使った変位計測方法。
【請求項1】
モアレ縞を利用して2地点間の微小な相対変位を計測するモアレ縞を使った変位計測方法であって、計測対象に沿うように設置され相互に重ねられた2枚の板状の部品からなる計測装置の2枚の板状の部品のそれぞれに、空間的に周期構造をもつ格子を表示し、格子同士の光学的な干渉により生じるモアレ縞の移動量を読み取ることで計測対象の変位を計測することを特徴とするモアレ縞を使った変位計測方法。
【請求項2】
前記モアレ縞は、前記計測装置の2枚の板状の部品のそれぞれに互いに異なる格子を表示することによって、格子同士の光学的な干渉により生じるモアレ縞の移動量を、実際の計測対象の変位に対して任意の拡大倍率で表示することを特徴とする請求項1記載のモアレ縞を使った変位計測方法。
【請求項3】
前記計測装置を離れた地点から撮影装置で撮影し、処理装置により撮影角度の傾きに起因する画像データの歪みを幾何補正し、補正した画像データから前記計測装置のモアレ縞の移動量をパターンマッチングにより読み取り、モアレ縞の移動量を前記拡大倍率で除することで計測対象の変位を計測することを特徴とする請求項2に記載のモアレ縞を使った変位計測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−191282(P2011−191282A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−83651(P2010−83651)
【出願日】平成22年3月12日(2010.3.12)
【出願人】(505013664)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月12日(2010.3.12)
【出願人】(505013664)
【Fターム(参考)】
[ Back to top ]