
モジュラヘッド積層装置及び方法
複合アイテムは装置で製造される。装置はエンドエフェクタおよび位置付け装置を含んでいる。エンドエフェクタはトウを位置付ける。エンドエフェクタはスピンドルと、圧縮装置と、通路とを含んでいる。スピンドルはトウのスプールを取外し可能に固定し、通路はスプールから圧縮装置へ配置されている。位置付け装置はエンドエフェクタを位置させる。エンドエフェクタは位置付け装置に取外し可能に固定されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は積層装置に関し、特に本発明は複合アイテムを製造するシステム及び装置ならびに方法に関する。
【背景技術】
【0002】
複合アイテムは典型的に共に積層された材料の層から構成される。複合アイテムを製造または「レイアップ」するために使用される材料のカテゴリは例えばファイバ、繊維、テープ、フィルム、ホイルである。各これらのカテゴリ内で多数の異なる材料が使用される。例えば使用されるファイバはガラス、炭素、アラミド、水晶等を含んでいる。これらのファイバが織地のシートおよび一方向のリボンとして配置されるとき、これらは繊維及びテープとそれぞれ呼ばれる。
【0003】
ファイバの配置には複合アイテムを構成または製造に使用されるプロセスである。これらの複合アイテムには比較的簡単な平面シートまたはパネルから比較的大きい複雑なシートまで含まれている。複合アイテムは通常、未硬化樹脂で予め含浸された(「プリプレグ」)複合材料の多層またはプライから構成されている。
【0004】
7軸の操作装置上のヘッドはプリプレグトウのグループを連続的なバンドへ配列させ、これらを成形またはレイアップツールの表面に対して圧縮する。ファイバの配置はフィラメントの巻線と自動化されたテープ積層のそれぞれの欠点を避けながらその両者の利点を組み合わせる。通常のファイバ配置機械は複合プリプレグ材料またはトウを保存するために使用される大きな冷却されたクリールハウスを有する。このクリールハウスは通常、ヘッドから離されており、材料またはヘッドを変更するときクリールからヘッドへトウを再度装着するのに1時間程度の時間がかかる。さらに、クリールからヘッドへトウを伝送するためのコンポーネント上またはその周辺に樹脂がしばしば蓄積し、製造時に中断時間を生じさせる可能性がある。
【発明の開示】
【発明が解決しようとする課題】
【0005】
したがって、少なくともある程度までここで記載した欠点を克服することのできる方法及び装置を提供することが望まれている。
【課題を解決するための手段】
【0006】
前述の要求は本発明により満足される。1特徴では、装置、システムおよび方法が与えられ、これらは幾つかの実施形態では一体化されたクリールを有するモジュラヘッドを備えた基板上にトウを配置する。
【0007】
本発明の1実施形態は、複合アイテムを製造する装置に関する。その装置はエンドエフェクタおよび位置付け装置を含んでいる。エンドエフェクタはトウを位置させる。エンドエフェクタはスピンドルと、トウの通路と、圧縮装置とを含んでいる。スピンドルはトウのスプールを取外し可能に固定し、通路はスプールから圧縮装置へ配置されている。位置付け装置はエンドエフェクタを位置させる。エンドエフェクタは位置付け装置へ取外し可能に固定されている。
【0008】
本発明の別の実施形態は複合アイテムを製造するためのシステムに関する。このシステムはツール、エンドエフェクタ、位置付け装置を含んでいる。ツールはマンドレル及び主軸台を含んでいる。トウがマンドレルに与えられる。主軸台は軸を中心としてマンドレルを回転させる。エンドエフェクタはトウを配置する。エンドエフェクタはスピンドルと、圧縮装置と、通路とを含んでいる。スピンドルはトウのスプールを取外し可能に固定する。圧縮装置はマンドレル上にトウを加圧する。通路はスプールから圧縮装置へ設けられている。位置付け装置はエンドエフェクタをツールに関して位置付けるために主軸台と協動し、エンドエフェクタは位置付け装置に取外し可能に固定されている。
【0009】
本発明のさらに別の実施形態は複合アイテムを製造する方法に関する。この方法では、第1のエンドエフェクタはトウを型へ与えるために複数のエンドエフェクタから選択される。第1のエンドエフェクタは位置付け装置へ固定され、トウが型へ与えられる。
【0010】
したがって、本発明のある実施形態の詳細な説明が良好に理解されることができ、本発明の技術に対する貢献が良好に認識されるように、本発明のある実施形態について広く概説する。勿論、以下説明し、特許請求の主題を形成する本発明の付加的な実施形態が存在する。
【0011】
これに関連して、本発明の少なくとも1つの実施形態を詳細に説明する前に、本発明はその適用において以下の説明で説明されているまたは図面に示されているコンポーネントの構造の詳細またはその配置に限定されないことが理解されるべきである。本発明は説明したものに付加された実施形態が可能であり、種々の方法で実施及び実行されることが可能である。さらに、ここで使用されている語法及び用語ならびに要約は説明のためであり、本発明の限定として考えるべきではないことを理解すべきである。
【0012】
このようにして、当業者はこの説明が基礎としている概念が、本発明の幾つかの目的を実行するための他の構造、方法、システムの設計の基礎として容易に利用されることができることを認識するであろう。それ故、特許請求の範囲は本発明の技術的範囲を逸脱しない限りにおいて、このような等価の構造を含むものと考えることが重要である。
【発明を実施するための最良の形態】
【0013】
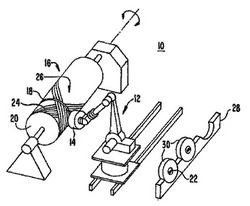
本発明を図面を参照して説明する。同一の参照符合は全体を通して類似の部分を指している。図1に示されているように、本発明の1実施形態で使用するのに適した積層装置10は位置付け装置12とエンドエフェクタ14を含んでいる。位置付け装置12は位置付けまたはその他の方法でエンドエフェクタ14の移動を制御するように構成されている。本発明の1実施形態では、位置付け装置12は3乃至10以上の動作軸を制御するように構成されたロボットのアーマチュアまたはガントリ型位置付け装置である。しかしながら特定の軸数は特定の動作状態に依存しており、それ故制御される軸数は本発明に対して臨界的ではないことが理解されるべきである。
【0014】
積層装置12は型20上にコース材料18を与えることによってアイテム16を製造するように構成されている。典型的にアイテム16はコース材料18の多数のプライまたは層から製造される。種々の形態では、エンドエフェクタ14はコース材料18を型20へ与えるために圧縮ローラ22および/またはスイープを含んでいる。型20はプライの位置させるための適切に安定された完成された表面を与えるように構成されている。図1に示されているように、型20は軸を中心に回転するように制御される。このように回転するように制御されるとき、型20は典型的にマンドレルと呼ばれる。他の実施形態では、型20は静止していてもよく、或いは種々の軸で動くように制御されることができる。例えば型20は滑動テーブルまたはX−Yテーブルに固定されることができる。これに関して、型20および/またはエンドエフェクタ14が一方が他方に関して動くように制御されるこれら及び他の実施形態は本発明の技術的範囲内である。さらに型20と位置付け装置12の動作は両者ともエンドエフェクタ14を位置付けるように作用する。さらに、型20と位置付け装置12の動作は通常、装置が単一のユニットとして基本的に動作する程度まで調整され、この説明の目的では位置付け装置12および/または型20の調整が位置付け装置12に関して言及されている。寸法、形状、外形等のような型20の特性はアイテム16の設計パラメータに基づいている。複数のコース24から構成されているアイテム16が図1に示されている。型20または基板26上に配置されるコース24の各層はプライとして説明され、アイテム16は典型的に複数のプライから製造される。基板26は型20の表面および/または以前に与えられたコース24を含んでいる。
【0015】
図1に示されている1実施形態によれば、積層装置10はさらにオフラインエンドエフェクタ30のセットを保持するように構成されたオフラインステーション28を含んでいる。オフラインエンドエフェクタ30はそれぞれ制御可能な高速度の解放結合によりエンドエフェクタ14と交換可能であるように動作可能である。本発明の種々の実施形態の利点は1組のオフラインエンドエフェクタ30が非常に増加された生産性を容易にすることである。即ち供給動作がエンドエフェクタ14上で行われる場合、エンドエフェクタ14はオフラインステーション28に配置され、位置付け装置12から接続を遮断することにより「オフライン」にされる。位置付け装置12はその後オフラインエンドエフェクタ30に接続され、積層装置はアイテム16を製造し続ける。
【0016】
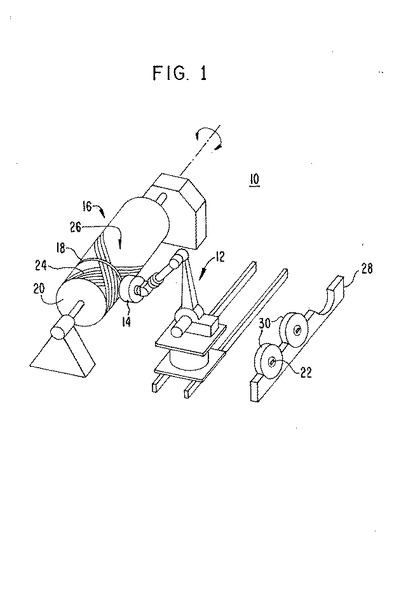
図2は積層装置10と共に使用するのに適しているエンドエフェクタ14の前面の斜視図である。図2に示されているように、エンドエフェクタ14はトウ36を供給するためのスプール34のセットを含んでいる。トウ36は任意の適切なコース材料を含んでいる。適切なコース材料の例には、種々のファイバ、フィルム、ホイルおよび/またはその他が含まれている。ファイバの特定の例にはガラス、アラミド、炭素、種々の他のファイバが含まれている。トウ36は個々のファイバ、束、コード、編組、一方方向の「テープ」の形態のリボン、織地の繊維、2軸の生地等を含んでいる。さらに、トウ36は樹脂またはその他のこのような結合物質で予め含浸されることができる。説明を続けると、各スプール34はそれぞれのスピンドルまたは張力装置38上に設けられている。張力装置38はそれぞれのスプール34をエンドエフェクタ14へ取外し可能に固定し、例えばブレーキまたはモータのような任意の適当な張力装置を含んでおり、その他の方法でトウ36が供給される速度を調整する。適切な張力装置の特定の例には張力装置38の周辺の一部分を包むベルトを含んでおり、張力装置38の回転を妨げる摩擦を発生する。この摩擦はベルト上に作用するソレノイドまたはサーボの動作を介して調整される。通常のファイバ位置付けシステムでは、エンドエフェクタはクリールに関して1m以上移動し、このようにして張力装置はこのゆるみを巻き取る。対照的に、本発明の実施形態がエンドエフェクタ14にクリールを含むとき、巻き取るゆるみはほとんどまたは全く存在しない。したがって本発明の種々の実施形態の利点は、通常のファイバ位置付けシステムにより必要とされる張力装置と比較して、張力装置38が比較的簡単で廉価で信頼性のある張力装置を利用できることである。
【0017】
エンドエフェクタ14はさらにスプール34から圧縮ローラ22へ移動するときトウ36がたどる通路40を含んでいる。この通路40はトウの供給速度の急激な変化を低下させるダンサーローラ42を含んでいる。通路40はさらにトウ36を切断アセンブリ46へ誘導するための再誘導滑車42を含んでいる。1実施形態によれば、ダンサーローラ42と再誘導滑車44は基本的に相互に関して角度が固定されている。したがってトウ36が再誘導滑車44へ誘導される角度はスプール34の半径がトウ36の除去のために減少されるときでさえも実質的に一定である。ダンサーローラ42はさらにトウ36をスプール34から円滑に除去することを容易にし、さらに随意選択的なトウのバッキング48が存在するならばその除去を容易にする。トウのバッキング48またはセパレータフィルムは存在するならば、それがスプール34上に存在するかロールの形態でありながら、トウ36がそれ自体に接着することを実質的に防止する。トウのバッキング48を除去するため、エンドエフェクタ14は随意選択的にバッキング除去システムを含んでいる。バッキングの除去システムはトウ36からトウのバッキング48を引き離すように動作可能な任意の適切なシステムを含んでいる。適切なバッキング除去システムには巻き取りスプールまたはリールなどが含まれている。特定の実施形態では、エンドエフェクタ14は真空源と流体連通する真空ノズル50を含んでおり、トウのバッキング48を引き離すのに十分な吸引力を発生するように構成されている。
【0018】
再誘導滑車44から、トウ36はさらに通路40に沿って例えばくし(comb)、切断アセンブリ、クランプ、ダンサー、アイドラ等のような一連の随意選択的なコンポーネントを通過するように誘導される。その後、トウ36は圧縮ローラ22へ誘導される。
【0019】
トウ36の材料の特性にしたがって、例えば温度、湿度等のような環境的な変数を調整することが有効である。さらに製造業者の仕様および/または経験的に得られた日付に基づいて、保存および/または供給状態は異なる可能性がある。これに関連して、エンドエフェクタ14は随意選択的にハウジング52と、環境制御アセンブリ58(図3に示されている)と、ヒータ56(図3に示されている)と、冷却装置58(図3に示されている)とを含んでいる。図2に示されているように、ハウジング52はスプール34のセットを包囲し、したがって環境制御アセンブリ58により供給される空気流を実質的に保持および/または誘導することによってトウ36が存在する環境で制御を行うことを容易にする。ハウジング52は圧縮ローラ22が型22に送るための開口60を含んでいる。種々の実施形態では、ハウジングは半透明、透明または少なくとも部分的に透明である。例えばスプール34のセットとエンドエフェクタ14の他のコンポーネントの視覚的検査を容易にするために、ハウジング52はアクリル、ポリカーボネート、ポリエチレン、lexan(商標名)、Plexiglas(商標名)等のような半透明または実質的に透明な材料を含んでいる。
【0020】
本発明の1実施形態によれば、圧縮ローラ22はエンドエフェクタに関して軸“A”に沿って移動するように随意選択的に構成される。この軸Aは通常、コンプライアンス軸と呼ばれ、積層装置10が型20の僅かな(±1乃至20mm)の誤整列および/または型20における予測できないトウの蓄積に適応することを可能にする。これについて、圧縮ローラサブアセンブリ64は1対のブラケット66に滑動可能に固定される。圧縮ローラサブアセンブリ64は1以上の空気シリンダ68の動作を介して型20方向へ押し付けられる。
【0021】
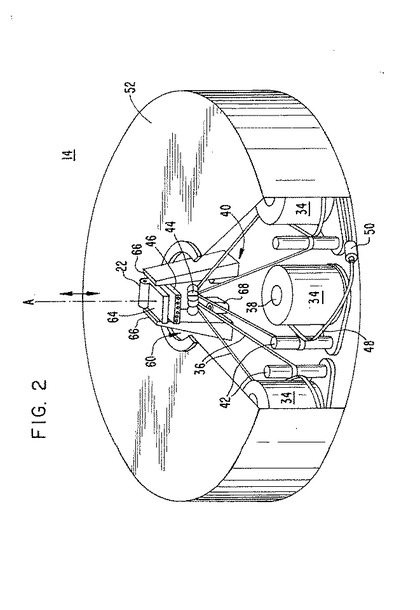
図3は積層装置10と共に使用するのに適したシステム70のブロック図である。図3に示されているように、システム70は制御装置72を含んでいる。制御装置72はコンピュータの読取可能なコードを実行するように動作可能である。これに関して、システム70はコンピュータの読取可能な命令またはコード74のセットを含んでいる。そのコード74にしたがって、制御装置72はファイル76をアクセスするように構成されている。このファイル76は次のうちの1以上、即ち複合アイテム16のコンピュータの読取可能なモデル、レイアップ型または型20の表面のコンピュータの読取可能な表示、型20のエッジのコンピュータの読取可能な表示、複合アイテム16の厚さ、複合アイテム16と型20の少なくとも一方に基づいたソースコード、ソースコードに基づいた動作命令のセット、複合アイテム16のレイアップ中に集められたデータ、タイムスタンプ情報、位置情報、識別番号等を含んでいる。制御装置72はさらにネットワーク78を横切って通信するように構成されている。ネットワーク78は付加的なデータ記憶および/または処理能力を与えるために随意選択的に含まれている。これに関して、ネットワークはデータベース80とサーバ82を含んでいる。データベース80はコード74および/またはファイル76のコピーを記憶するように構成されている。サーバ82はコード74および/またはファイル76を生成し、記憶し、任意の適当な処理を実行するように構成されている。このように、サーバ82のようなコンピュータ補助設計(CAD)マシンで生成された複合アイテム16のような複合アイテムは例えば積層装置10へ転送されることができる。さらにサーバ82はネットワーク78を介してコード74および/またはファイル76の更新を転送するように動作可能である。さらに、システム70はメモリ84を随意選択的に含んでいる。そのようなメモリが存在するならば、メモリ84はコード74および/またはファイル76のコピーを記憶するように構成されている。
【0022】
また図3には位置付け装置の制御装置86が示されている。位置付け装置の制御装置86は種々のアクチュエイタおよび/または積層装置10のサーボモータの要求に応じてシステム70に随意選択的に含まれている。即ち積層装置10の特定の構造に応じて、複数のアクチュエイタおよび/またはサーボモータは積層装置10の種々のコンポーネントの回転、位置、速度、方向などを調整する。特に、位置付け装置12のこれらのアクチュエイタおよび/またはサーボモータはエンドエフェクタ14および/または積層装置10の種々の軸を調整するように少なくとも構成されている。位置付け装置の制御装置86のパラメータはそれが存在するならば、種々のアクチュエイタ、サーボおよび/または制御装置72の仕様に基づいている。位置付け装置の制御装置86はこれが存在するならばこれらのアクチュエイタおよび/またはサーボモータの幾つかまたは全てを制御するように構成される。さらにこれらのアクチュエイタおよび/またはサーボモータは直接的に制御装置72により調整されるように随意選択的に動作可能であり、したがってシステム70は位置付け装置の制御装置86を省略してもよい。
【0023】
さらに、制御装置72は複数の張力装置38を調整するように構成されている。例えば、速度、移動方向、回転半径等に応じて、制御装置72は各張力装置38が提供する抵抗量を個別に制御するように構成される。このようにして各トウ36は制御される。同様に制御装置72は切断アセンブリ46とクランプ90A乃至90nのセットを制御するように構成されている。これに関して、エンドエフェクタ14は通常、各トウ36の切断装置およびクランプ90A乃至90nを含んでいる。制御装置72は個々のトウが適切であるように付加されるかコース24から除去されることができるように切断アセンブリ46とクランプ90A乃至90nを制御するように構成されている。
【0024】
制御装置72はさらに解放装置92を制御するように構成されている。解放装置92は制御可能で解放可能な方法でエンドエフェクタ14を位置付け装置12へ固定する。例えば解放装置92は締付けピン等のようなベアリング表面上に力を与えるように動作可能な任意の適切なアクチュエイタを含んでいる。このようにして、制御装置72はエンドエフェクタ14から迅速及び自動的に取外され、オフラインエンドエフェクタ30のセットの少なくとも1つへ再度取り付けるように動作可能である。
【0025】
随意選択的に、制御装置72は環境制御装置56、ヒータ56、冷却装置58、真空源94等のような種々の他の装置を制御および/またはそれらと通信するように構成されている。ここで説明したように、環境制御装置56はハウジング52内の環境を調整するために随意選択的に設けられる。これに関して、環境制御装置56はセンサ96から信号を受信し、これらの信号に基づいて、空調(“A/C”)装置98を制御するように構成されている。センサ96はハウジング52内の環境を感知し、環境状態に基づいて信号を発生するように構成されている。A/C装置98はハウジング52内の調節された空気流を導くように構成される。ヒータ56はコース材料18の温度を調整するために随意的に設けられる。冷却装置58は切断アセンブリ46、クランプ90A乃至90nのセット、通路40、例えば再開ローラ等のような種々の他のコンポーネントの温度を減少させるために随意選択的に設けられる。真空源94は真空を真空ノズル50へ供給するために随意選択的に設けられている。
【0026】
システム70は積層装置10の種々の適切な動作状態または属性を感知するように構成されている複数のセンサをさらに含んでいる。適切な属性の例はトウ36の幾つかまたは全ての温度、セパレータフィルム22がトウ36から分離される位置(解放点)の温度、供給速度及び方向、材料の位置付け、バッキングの一体性、トウ36の供給および/またはその他を含んでいる。
【0027】
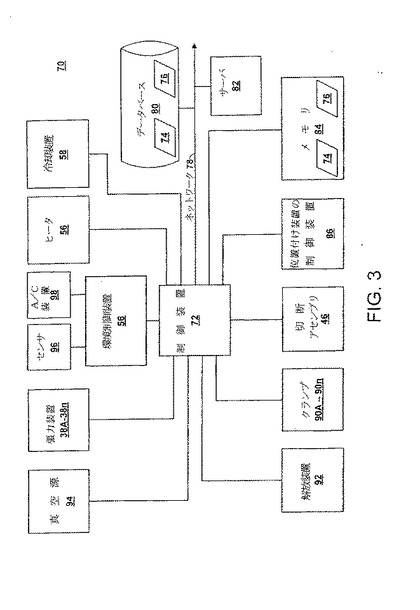
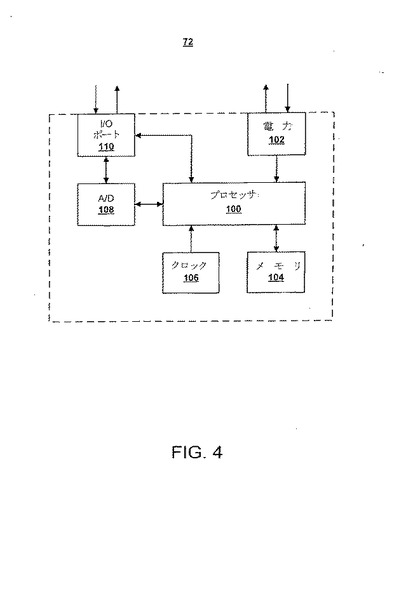
図4はシステム70で使用するのに適した制御装置72のシステムアーキテクチャである。図4に示されているように、制御装置72はプロセッサ100を含んでいる。このプロセッサ100は電源102、メモリ104、クロック106、アナログデジタル変換器(A/D)108、入力/出力(I/O)ポート110に動作可能に接続されている。I/Oポート110は任意の適切に取り付けられた電子装置から信号を受信し、これらの信号をA/D108および/またはプロセッサ100へ転送するように構成されている。信号がアナログフォーマットであるならば、信号はA/D108を介して伝送されることができる。これに関して、A/D108はアナログフォーマット信号を受信し、これらの信号を対応するデジタルフォーマット信号へ変換するように構成されている。反対に、A/D108はプロセッサ100からデジタルフォーマット信号を受信し、これらの信号をアナログフォーマットへ変換し、そのアナログ信号をI/Oポート110へ転送するように構成されている。このようにして、アナログ信号を受信するように構成されている電子装置はプロセッサ100と相互に通信することができる。
【0028】
プロセッサ100はA/D108および/またはI/Oポート110との間で信号を受信及び送信するように構成されている。プロセッサ100はさらにクロック106から時間信号を受信するように構成されている。さらにプロセッサ100はメモリ104へ電子データを記憶し、そこから電子データを検索するように構成されている。さらに、プロセッサ100は位置付け装置の制御装置86を調整し、それによって積層装置10の種々のアクチュエイタおよび/またはサーボモータを制御して特定の力を与えおよび/または特定の程度まで回転するように構成されている。
【0029】
本発明の1実施形態によれば、プロセッサ100はコード74を実行するように構成されている。この命令のセットと、積層装置10の種々のコンポーネントからの信号に基づいて、プロセッサ100は動作命令のセットを決定し、ヒータ80、冷却装置58、切断アセンブリ46等を調整するように構成されている。
【0030】
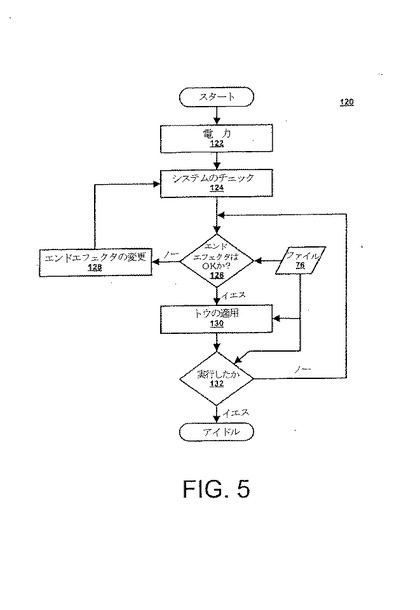
図5は複合アイテム16を製造するためにトウ36を位置付ける方法120に含まれるステップを示している。この方法120の開始前に、複合製品が設計され、この設計に基づいて、アイテム16のような複合製品の属性を特定する一連のコンピュータの読取可能な命令が発生される。さらに、トウ36の属性または特性はアイテム16の特性に基づいて決定される。例えばアイテム16は異なる複合材料の層またはプライを含むことができる。特に、航空機の胴体は構造を設けるための多数の炭素ファイバのプライと、落雷に対して保護するためのワイヤメッシュプライと、平滑な表面を設けるための表面仕上げプライとを含むことができる。これらの異なる複合材料はオフラインエンドエフェクタ30の各セット上に別々に装荷されることができ、適切なときに、それぞれのオフラインエンドエフェクタ30が選択され、トウ36を配置するために使用される。これら及びその他のこのようなパラメータはコンピュータの読取可能な命令を含むファイル76中に含まれ、アイテム16を製造するためにアクセスされる。
【0031】
さらに、スプール34のセットの1以上のスプールが消耗されるときの見積もりは随意選択的に計算され、スプールがアイテム16の製造期間中に消耗されそうであるならば、オフラインエンドエフェクタ30のセットは置換を含むように構成されることができる。このようにしてスプールの置換による中断時間は最小にされ、或いは本質的に除去されることができる。さらにオフラインエンドエフェクタ30のセットは故障の場合に使用されるように1以上のスペアを含むように構成されることができる。このようにしてスプールの交換による中断時間はさらに最小にされ、本質的に除去されることができる。
【0032】
さらに、型または型20のようなツールが設計され、複合製品の設計に基づいて構成される。さらにスプール34はエンドエフェクタ14中に設置され、トウ36はエンドエフェクタ14を通される。
【0033】
ステップ122で、方法120はここで前述した積層装置10の種々のコンポーネントを付勢またはオンに切換え、ファイル76中のコンピュータの読取可能な命令を実行することにより開始される。
【0034】
ステップ124で、システムは適切な動作を保証するためにチェックされる。例えば制御装置72は各コンポーネントに問合せ、コンポーネントから応答に基づいて制御装置72は動作状態を決定する。制御装置72はさらにエンドエフェクタ14に装荷されている複合材料のタイプとスプール32の各セットにおけるトウの供給を決定する。
【0035】
ステップ126で、エンドエフェクタ14が適切であり、正常運転しているか否かを決定する。例えば制御装置72はエンドエフェクタ14に装荷されている複合材料が適切であるか否かを決定するためにファイル76をアクセスする。複合材料が適切ではないことが決定されたならば、エンドエフェクタ14はステップ128で適切なオフラインエンドエフェクタ30と交換される。複合材料が適切であることが決定されたならば、トウ36はステップ130で与えられる。
【0036】
ステップ128で、エンドエフェクタ14は適切なオフラインエンドエフェクタ30と交換される。例えば位置付け装置12はオフラインステーション28にエンドエフェクタ14を位置付けし、制御装置72は結合を外すように解放装置92を制御する。位置付け装置はさらに適切なオフラインエンドエフェクタ30を選択し、それと結合するように制御され、制御装置72は結合するように解放装置92を制御する。適切なエンドエフェクタを選択することに関して、種々の実施形態では、特定のタイプのトウを有するエンドエフェクタはオフラインステーション28上に予め限定された位置を有することができ、および/またはエンドエフェクタはそこに装荷されたトウのタイプを決定するように構成されることができ、さらにオフラインステーション28上の相対的な位置を決定するように構成されることができる。この情報は制御装置72に転送され、オフラインエンドエフェクタ30のセットから適切なエンドエフェクタを選択するために利用される。このようにして、エンドエフェクタ14は迅速に自動的に交換され、それによって少なくともトウ材料の変更、トウ材料の再供給および糸通し、エンドエフェクタの故障による中断時間を減少または除去する。ステップ128に続いて、新たに設置されたエンドエフェクタ14のシステムチェックがステップ124で行われる。
【0037】
ステップ130で、トウ36は型20に供給される。特にファイル76にしたがって、制御装置72はトウ36を基板26に与えるために積層装置10を調節する。例えばコースの開始位置、通路、最終位置がファイル76から検索され、制御装置72は積層装置10の種々のコンポーネントを調節し、トウ36を開始位置へ取り付け、通路に沿ってトウ36を引き出し、圧縮し、最終位置でトウ36を切断する。
【0038】
ステップ132で、アイテム16のレイアップが終了したか否かが決定される。例えば制御装置72がファイルの最終(“EOF”)ステートメントがファイル76から検索されたことを決定したならば、アイテム16のレイアップが完了したことが決定され、積層装置10はさらに命令が受信されるまでアイドル状態にあるように制御される。さらにレイアッププロトコルがファイル76で与えられたことが決定されたならば、さらにステップ126でエンドエフェクタ14が作動可能でありトウ36が適切に供給されたか否かが決定されることができる。
【0039】
方法120に続いて、アイテム16または複合製品は任意の適当な方法で硬化されることができる。航空宇宙産業では、熱硬化性樹脂が通常プライ材料を予め含浸しておくために使用される。これらの熱硬化性樹脂は典型的に予め定められた時間量において上昇された温度と圧力で硬化される。時間、圧力および温度は使用される樹脂、複合製品の寸法及び厚さ等にしたがって選択されることができる。
【0040】
位置付け装置12により制御されるエンドエフェクタ14の1例が示されているが、他の制御システムも使用されることができることが認識されるであろう。これに関して、ガントリシステム、誘導ビークルまたは任意の適切なエンドエフェクタの動作を支援し制御するその他のこのような位置付け装置はエンドエフェクタ14と共に使用するのに適している。また積層装置10は航空機産業の複合製品でプライを位置付けるのに有用であるが、複合製品を構成する他の産業で使用されることもできる。これらの産業には自動車、船舶、宇宙船、建物、消費者製品を含んでいるが、それらに限定されない。
【0041】
本発明の多くの特徴及び利点は詳細な説明から明白であり、したがって、本発明の技術的範囲内に入る本発明の全てのこのような特徴及び利点は特許請求の範囲によってカバーされることを意図している。さらに多くの変更及び変化が当業者により容易に行われるので、本発明は例示され説明した構造及び動作に正確に限定されることは望んでいない。したがって全ての適切な変更及び等価物は本発明の技術的範囲内に含まれる。
【図面の簡単な説明】
【0042】
【図1】本発明の1実施形態による自動化された積層装置の斜視図。
【図2】図1の積層装置と共に使用するのに適したエンドエフェクタの前面の斜視図。
【図3】図1の積層装置と共に使用するのに適したシステムのブロック図。
【図4】図1の積層装置中で使用するのに適した制御装置に対するシステムアーキテクチャ。
【図5】図1の積層装置による複合アイテムを製造するためのトウを位置付ける方法に含まれるステップを示したフロー図。
【技術分野】
【0001】
本発明は積層装置に関し、特に本発明は複合アイテムを製造するシステム及び装置ならびに方法に関する。
【背景技術】
【0002】
複合アイテムは典型的に共に積層された材料の層から構成される。複合アイテムを製造または「レイアップ」するために使用される材料のカテゴリは例えばファイバ、繊維、テープ、フィルム、ホイルである。各これらのカテゴリ内で多数の異なる材料が使用される。例えば使用されるファイバはガラス、炭素、アラミド、水晶等を含んでいる。これらのファイバが織地のシートおよび一方向のリボンとして配置されるとき、これらは繊維及びテープとそれぞれ呼ばれる。
【0003】
ファイバの配置には複合アイテムを構成または製造に使用されるプロセスである。これらの複合アイテムには比較的簡単な平面シートまたはパネルから比較的大きい複雑なシートまで含まれている。複合アイテムは通常、未硬化樹脂で予め含浸された(「プリプレグ」)複合材料の多層またはプライから構成されている。
【0004】
7軸の操作装置上のヘッドはプリプレグトウのグループを連続的なバンドへ配列させ、これらを成形またはレイアップツールの表面に対して圧縮する。ファイバの配置はフィラメントの巻線と自動化されたテープ積層のそれぞれの欠点を避けながらその両者の利点を組み合わせる。通常のファイバ配置機械は複合プリプレグ材料またはトウを保存するために使用される大きな冷却されたクリールハウスを有する。このクリールハウスは通常、ヘッドから離されており、材料またはヘッドを変更するときクリールからヘッドへトウを再度装着するのに1時間程度の時間がかかる。さらに、クリールからヘッドへトウを伝送するためのコンポーネント上またはその周辺に樹脂がしばしば蓄積し、製造時に中断時間を生じさせる可能性がある。
【発明の開示】
【発明が解決しようとする課題】
【0005】
したがって、少なくともある程度までここで記載した欠点を克服することのできる方法及び装置を提供することが望まれている。
【課題を解決するための手段】
【0006】
前述の要求は本発明により満足される。1特徴では、装置、システムおよび方法が与えられ、これらは幾つかの実施形態では一体化されたクリールを有するモジュラヘッドを備えた基板上にトウを配置する。
【0007】
本発明の1実施形態は、複合アイテムを製造する装置に関する。その装置はエンドエフェクタおよび位置付け装置を含んでいる。エンドエフェクタはトウを位置させる。エンドエフェクタはスピンドルと、トウの通路と、圧縮装置とを含んでいる。スピンドルはトウのスプールを取外し可能に固定し、通路はスプールから圧縮装置へ配置されている。位置付け装置はエンドエフェクタを位置させる。エンドエフェクタは位置付け装置へ取外し可能に固定されている。
【0008】
本発明の別の実施形態は複合アイテムを製造するためのシステムに関する。このシステムはツール、エンドエフェクタ、位置付け装置を含んでいる。ツールはマンドレル及び主軸台を含んでいる。トウがマンドレルに与えられる。主軸台は軸を中心としてマンドレルを回転させる。エンドエフェクタはトウを配置する。エンドエフェクタはスピンドルと、圧縮装置と、通路とを含んでいる。スピンドルはトウのスプールを取外し可能に固定する。圧縮装置はマンドレル上にトウを加圧する。通路はスプールから圧縮装置へ設けられている。位置付け装置はエンドエフェクタをツールに関して位置付けるために主軸台と協動し、エンドエフェクタは位置付け装置に取外し可能に固定されている。
【0009】
本発明のさらに別の実施形態は複合アイテムを製造する方法に関する。この方法では、第1のエンドエフェクタはトウを型へ与えるために複数のエンドエフェクタから選択される。第1のエンドエフェクタは位置付け装置へ固定され、トウが型へ与えられる。
【0010】
したがって、本発明のある実施形態の詳細な説明が良好に理解されることができ、本発明の技術に対する貢献が良好に認識されるように、本発明のある実施形態について広く概説する。勿論、以下説明し、特許請求の主題を形成する本発明の付加的な実施形態が存在する。
【0011】
これに関連して、本発明の少なくとも1つの実施形態を詳細に説明する前に、本発明はその適用において以下の説明で説明されているまたは図面に示されているコンポーネントの構造の詳細またはその配置に限定されないことが理解されるべきである。本発明は説明したものに付加された実施形態が可能であり、種々の方法で実施及び実行されることが可能である。さらに、ここで使用されている語法及び用語ならびに要約は説明のためであり、本発明の限定として考えるべきではないことを理解すべきである。
【0012】
このようにして、当業者はこの説明が基礎としている概念が、本発明の幾つかの目的を実行するための他の構造、方法、システムの設計の基礎として容易に利用されることができることを認識するであろう。それ故、特許請求の範囲は本発明の技術的範囲を逸脱しない限りにおいて、このような等価の構造を含むものと考えることが重要である。
【発明を実施するための最良の形態】
【0013】
本発明を図面を参照して説明する。同一の参照符合は全体を通して類似の部分を指している。図1に示されているように、本発明の1実施形態で使用するのに適した積層装置10は位置付け装置12とエンドエフェクタ14を含んでいる。位置付け装置12は位置付けまたはその他の方法でエンドエフェクタ14の移動を制御するように構成されている。本発明の1実施形態では、位置付け装置12は3乃至10以上の動作軸を制御するように構成されたロボットのアーマチュアまたはガントリ型位置付け装置である。しかしながら特定の軸数は特定の動作状態に依存しており、それ故制御される軸数は本発明に対して臨界的ではないことが理解されるべきである。
【0014】
積層装置12は型20上にコース材料18を与えることによってアイテム16を製造するように構成されている。典型的にアイテム16はコース材料18の多数のプライまたは層から製造される。種々の形態では、エンドエフェクタ14はコース材料18を型20へ与えるために圧縮ローラ22および/またはスイープを含んでいる。型20はプライの位置させるための適切に安定された完成された表面を与えるように構成されている。図1に示されているように、型20は軸を中心に回転するように制御される。このように回転するように制御されるとき、型20は典型的にマンドレルと呼ばれる。他の実施形態では、型20は静止していてもよく、或いは種々の軸で動くように制御されることができる。例えば型20は滑動テーブルまたはX−Yテーブルに固定されることができる。これに関して、型20および/またはエンドエフェクタ14が一方が他方に関して動くように制御されるこれら及び他の実施形態は本発明の技術的範囲内である。さらに型20と位置付け装置12の動作は両者ともエンドエフェクタ14を位置付けるように作用する。さらに、型20と位置付け装置12の動作は通常、装置が単一のユニットとして基本的に動作する程度まで調整され、この説明の目的では位置付け装置12および/または型20の調整が位置付け装置12に関して言及されている。寸法、形状、外形等のような型20の特性はアイテム16の設計パラメータに基づいている。複数のコース24から構成されているアイテム16が図1に示されている。型20または基板26上に配置されるコース24の各層はプライとして説明され、アイテム16は典型的に複数のプライから製造される。基板26は型20の表面および/または以前に与えられたコース24を含んでいる。
【0015】
図1に示されている1実施形態によれば、積層装置10はさらにオフラインエンドエフェクタ30のセットを保持するように構成されたオフラインステーション28を含んでいる。オフラインエンドエフェクタ30はそれぞれ制御可能な高速度の解放結合によりエンドエフェクタ14と交換可能であるように動作可能である。本発明の種々の実施形態の利点は1組のオフラインエンドエフェクタ30が非常に増加された生産性を容易にすることである。即ち供給動作がエンドエフェクタ14上で行われる場合、エンドエフェクタ14はオフラインステーション28に配置され、位置付け装置12から接続を遮断することにより「オフライン」にされる。位置付け装置12はその後オフラインエンドエフェクタ30に接続され、積層装置はアイテム16を製造し続ける。
【0016】
図2は積層装置10と共に使用するのに適しているエンドエフェクタ14の前面の斜視図である。図2に示されているように、エンドエフェクタ14はトウ36を供給するためのスプール34のセットを含んでいる。トウ36は任意の適切なコース材料を含んでいる。適切なコース材料の例には、種々のファイバ、フィルム、ホイルおよび/またはその他が含まれている。ファイバの特定の例にはガラス、アラミド、炭素、種々の他のファイバが含まれている。トウ36は個々のファイバ、束、コード、編組、一方方向の「テープ」の形態のリボン、織地の繊維、2軸の生地等を含んでいる。さらに、トウ36は樹脂またはその他のこのような結合物質で予め含浸されることができる。説明を続けると、各スプール34はそれぞれのスピンドルまたは張力装置38上に設けられている。張力装置38はそれぞれのスプール34をエンドエフェクタ14へ取外し可能に固定し、例えばブレーキまたはモータのような任意の適当な張力装置を含んでおり、その他の方法でトウ36が供給される速度を調整する。適切な張力装置の特定の例には張力装置38の周辺の一部分を包むベルトを含んでおり、張力装置38の回転を妨げる摩擦を発生する。この摩擦はベルト上に作用するソレノイドまたはサーボの動作を介して調整される。通常のファイバ位置付けシステムでは、エンドエフェクタはクリールに関して1m以上移動し、このようにして張力装置はこのゆるみを巻き取る。対照的に、本発明の実施形態がエンドエフェクタ14にクリールを含むとき、巻き取るゆるみはほとんどまたは全く存在しない。したがって本発明の種々の実施形態の利点は、通常のファイバ位置付けシステムにより必要とされる張力装置と比較して、張力装置38が比較的簡単で廉価で信頼性のある張力装置を利用できることである。
【0017】
エンドエフェクタ14はさらにスプール34から圧縮ローラ22へ移動するときトウ36がたどる通路40を含んでいる。この通路40はトウの供給速度の急激な変化を低下させるダンサーローラ42を含んでいる。通路40はさらにトウ36を切断アセンブリ46へ誘導するための再誘導滑車42を含んでいる。1実施形態によれば、ダンサーローラ42と再誘導滑車44は基本的に相互に関して角度が固定されている。したがってトウ36が再誘導滑車44へ誘導される角度はスプール34の半径がトウ36の除去のために減少されるときでさえも実質的に一定である。ダンサーローラ42はさらにトウ36をスプール34から円滑に除去することを容易にし、さらに随意選択的なトウのバッキング48が存在するならばその除去を容易にする。トウのバッキング48またはセパレータフィルムは存在するならば、それがスプール34上に存在するかロールの形態でありながら、トウ36がそれ自体に接着することを実質的に防止する。トウのバッキング48を除去するため、エンドエフェクタ14は随意選択的にバッキング除去システムを含んでいる。バッキングの除去システムはトウ36からトウのバッキング48を引き離すように動作可能な任意の適切なシステムを含んでいる。適切なバッキング除去システムには巻き取りスプールまたはリールなどが含まれている。特定の実施形態では、エンドエフェクタ14は真空源と流体連通する真空ノズル50を含んでおり、トウのバッキング48を引き離すのに十分な吸引力を発生するように構成されている。
【0018】
再誘導滑車44から、トウ36はさらに通路40に沿って例えばくし(comb)、切断アセンブリ、クランプ、ダンサー、アイドラ等のような一連の随意選択的なコンポーネントを通過するように誘導される。その後、トウ36は圧縮ローラ22へ誘導される。
【0019】
トウ36の材料の特性にしたがって、例えば温度、湿度等のような環境的な変数を調整することが有効である。さらに製造業者の仕様および/または経験的に得られた日付に基づいて、保存および/または供給状態は異なる可能性がある。これに関連して、エンドエフェクタ14は随意選択的にハウジング52と、環境制御アセンブリ58(図3に示されている)と、ヒータ56(図3に示されている)と、冷却装置58(図3に示されている)とを含んでいる。図2に示されているように、ハウジング52はスプール34のセットを包囲し、したがって環境制御アセンブリ58により供給される空気流を実質的に保持および/または誘導することによってトウ36が存在する環境で制御を行うことを容易にする。ハウジング52は圧縮ローラ22が型22に送るための開口60を含んでいる。種々の実施形態では、ハウジングは半透明、透明または少なくとも部分的に透明である。例えばスプール34のセットとエンドエフェクタ14の他のコンポーネントの視覚的検査を容易にするために、ハウジング52はアクリル、ポリカーボネート、ポリエチレン、lexan(商標名)、Plexiglas(商標名)等のような半透明または実質的に透明な材料を含んでいる。
【0020】
本発明の1実施形態によれば、圧縮ローラ22はエンドエフェクタに関して軸“A”に沿って移動するように随意選択的に構成される。この軸Aは通常、コンプライアンス軸と呼ばれ、積層装置10が型20の僅かな(±1乃至20mm)の誤整列および/または型20における予測できないトウの蓄積に適応することを可能にする。これについて、圧縮ローラサブアセンブリ64は1対のブラケット66に滑動可能に固定される。圧縮ローラサブアセンブリ64は1以上の空気シリンダ68の動作を介して型20方向へ押し付けられる。
【0021】
図3は積層装置10と共に使用するのに適したシステム70のブロック図である。図3に示されているように、システム70は制御装置72を含んでいる。制御装置72はコンピュータの読取可能なコードを実行するように動作可能である。これに関して、システム70はコンピュータの読取可能な命令またはコード74のセットを含んでいる。そのコード74にしたがって、制御装置72はファイル76をアクセスするように構成されている。このファイル76は次のうちの1以上、即ち複合アイテム16のコンピュータの読取可能なモデル、レイアップ型または型20の表面のコンピュータの読取可能な表示、型20のエッジのコンピュータの読取可能な表示、複合アイテム16の厚さ、複合アイテム16と型20の少なくとも一方に基づいたソースコード、ソースコードに基づいた動作命令のセット、複合アイテム16のレイアップ中に集められたデータ、タイムスタンプ情報、位置情報、識別番号等を含んでいる。制御装置72はさらにネットワーク78を横切って通信するように構成されている。ネットワーク78は付加的なデータ記憶および/または処理能力を与えるために随意選択的に含まれている。これに関して、ネットワークはデータベース80とサーバ82を含んでいる。データベース80はコード74および/またはファイル76のコピーを記憶するように構成されている。サーバ82はコード74および/またはファイル76を生成し、記憶し、任意の適当な処理を実行するように構成されている。このように、サーバ82のようなコンピュータ補助設計(CAD)マシンで生成された複合アイテム16のような複合アイテムは例えば積層装置10へ転送されることができる。さらにサーバ82はネットワーク78を介してコード74および/またはファイル76の更新を転送するように動作可能である。さらに、システム70はメモリ84を随意選択的に含んでいる。そのようなメモリが存在するならば、メモリ84はコード74および/またはファイル76のコピーを記憶するように構成されている。
【0022】
また図3には位置付け装置の制御装置86が示されている。位置付け装置の制御装置86は種々のアクチュエイタおよび/または積層装置10のサーボモータの要求に応じてシステム70に随意選択的に含まれている。即ち積層装置10の特定の構造に応じて、複数のアクチュエイタおよび/またはサーボモータは積層装置10の種々のコンポーネントの回転、位置、速度、方向などを調整する。特に、位置付け装置12のこれらのアクチュエイタおよび/またはサーボモータはエンドエフェクタ14および/または積層装置10の種々の軸を調整するように少なくとも構成されている。位置付け装置の制御装置86のパラメータはそれが存在するならば、種々のアクチュエイタ、サーボおよび/または制御装置72の仕様に基づいている。位置付け装置の制御装置86はこれが存在するならばこれらのアクチュエイタおよび/またはサーボモータの幾つかまたは全てを制御するように構成される。さらにこれらのアクチュエイタおよび/またはサーボモータは直接的に制御装置72により調整されるように随意選択的に動作可能であり、したがってシステム70は位置付け装置の制御装置86を省略してもよい。
【0023】
さらに、制御装置72は複数の張力装置38を調整するように構成されている。例えば、速度、移動方向、回転半径等に応じて、制御装置72は各張力装置38が提供する抵抗量を個別に制御するように構成される。このようにして各トウ36は制御される。同様に制御装置72は切断アセンブリ46とクランプ90A乃至90nのセットを制御するように構成されている。これに関して、エンドエフェクタ14は通常、各トウ36の切断装置およびクランプ90A乃至90nを含んでいる。制御装置72は個々のトウが適切であるように付加されるかコース24から除去されることができるように切断アセンブリ46とクランプ90A乃至90nを制御するように構成されている。
【0024】
制御装置72はさらに解放装置92を制御するように構成されている。解放装置92は制御可能で解放可能な方法でエンドエフェクタ14を位置付け装置12へ固定する。例えば解放装置92は締付けピン等のようなベアリング表面上に力を与えるように動作可能な任意の適切なアクチュエイタを含んでいる。このようにして、制御装置72はエンドエフェクタ14から迅速及び自動的に取外され、オフラインエンドエフェクタ30のセットの少なくとも1つへ再度取り付けるように動作可能である。
【0025】
随意選択的に、制御装置72は環境制御装置56、ヒータ56、冷却装置58、真空源94等のような種々の他の装置を制御および/またはそれらと通信するように構成されている。ここで説明したように、環境制御装置56はハウジング52内の環境を調整するために随意選択的に設けられる。これに関して、環境制御装置56はセンサ96から信号を受信し、これらの信号に基づいて、空調(“A/C”)装置98を制御するように構成されている。センサ96はハウジング52内の環境を感知し、環境状態に基づいて信号を発生するように構成されている。A/C装置98はハウジング52内の調節された空気流を導くように構成される。ヒータ56はコース材料18の温度を調整するために随意的に設けられる。冷却装置58は切断アセンブリ46、クランプ90A乃至90nのセット、通路40、例えば再開ローラ等のような種々の他のコンポーネントの温度を減少させるために随意選択的に設けられる。真空源94は真空を真空ノズル50へ供給するために随意選択的に設けられている。
【0026】
システム70は積層装置10の種々の適切な動作状態または属性を感知するように構成されている複数のセンサをさらに含んでいる。適切な属性の例はトウ36の幾つかまたは全ての温度、セパレータフィルム22がトウ36から分離される位置(解放点)の温度、供給速度及び方向、材料の位置付け、バッキングの一体性、トウ36の供給および/またはその他を含んでいる。
【0027】
図4はシステム70で使用するのに適した制御装置72のシステムアーキテクチャである。図4に示されているように、制御装置72はプロセッサ100を含んでいる。このプロセッサ100は電源102、メモリ104、クロック106、アナログデジタル変換器(A/D)108、入力/出力(I/O)ポート110に動作可能に接続されている。I/Oポート110は任意の適切に取り付けられた電子装置から信号を受信し、これらの信号をA/D108および/またはプロセッサ100へ転送するように構成されている。信号がアナログフォーマットであるならば、信号はA/D108を介して伝送されることができる。これに関して、A/D108はアナログフォーマット信号を受信し、これらの信号を対応するデジタルフォーマット信号へ変換するように構成されている。反対に、A/D108はプロセッサ100からデジタルフォーマット信号を受信し、これらの信号をアナログフォーマットへ変換し、そのアナログ信号をI/Oポート110へ転送するように構成されている。このようにして、アナログ信号を受信するように構成されている電子装置はプロセッサ100と相互に通信することができる。
【0028】
プロセッサ100はA/D108および/またはI/Oポート110との間で信号を受信及び送信するように構成されている。プロセッサ100はさらにクロック106から時間信号を受信するように構成されている。さらにプロセッサ100はメモリ104へ電子データを記憶し、そこから電子データを検索するように構成されている。さらに、プロセッサ100は位置付け装置の制御装置86を調整し、それによって積層装置10の種々のアクチュエイタおよび/またはサーボモータを制御して特定の力を与えおよび/または特定の程度まで回転するように構成されている。
【0029】
本発明の1実施形態によれば、プロセッサ100はコード74を実行するように構成されている。この命令のセットと、積層装置10の種々のコンポーネントからの信号に基づいて、プロセッサ100は動作命令のセットを決定し、ヒータ80、冷却装置58、切断アセンブリ46等を調整するように構成されている。
【0030】
図5は複合アイテム16を製造するためにトウ36を位置付ける方法120に含まれるステップを示している。この方法120の開始前に、複合製品が設計され、この設計に基づいて、アイテム16のような複合製品の属性を特定する一連のコンピュータの読取可能な命令が発生される。さらに、トウ36の属性または特性はアイテム16の特性に基づいて決定される。例えばアイテム16は異なる複合材料の層またはプライを含むことができる。特に、航空機の胴体は構造を設けるための多数の炭素ファイバのプライと、落雷に対して保護するためのワイヤメッシュプライと、平滑な表面を設けるための表面仕上げプライとを含むことができる。これらの異なる複合材料はオフラインエンドエフェクタ30の各セット上に別々に装荷されることができ、適切なときに、それぞれのオフラインエンドエフェクタ30が選択され、トウ36を配置するために使用される。これら及びその他のこのようなパラメータはコンピュータの読取可能な命令を含むファイル76中に含まれ、アイテム16を製造するためにアクセスされる。
【0031】
さらに、スプール34のセットの1以上のスプールが消耗されるときの見積もりは随意選択的に計算され、スプールがアイテム16の製造期間中に消耗されそうであるならば、オフラインエンドエフェクタ30のセットは置換を含むように構成されることができる。このようにしてスプールの置換による中断時間は最小にされ、或いは本質的に除去されることができる。さらにオフラインエンドエフェクタ30のセットは故障の場合に使用されるように1以上のスペアを含むように構成されることができる。このようにしてスプールの交換による中断時間はさらに最小にされ、本質的に除去されることができる。
【0032】
さらに、型または型20のようなツールが設計され、複合製品の設計に基づいて構成される。さらにスプール34はエンドエフェクタ14中に設置され、トウ36はエンドエフェクタ14を通される。
【0033】
ステップ122で、方法120はここで前述した積層装置10の種々のコンポーネントを付勢またはオンに切換え、ファイル76中のコンピュータの読取可能な命令を実行することにより開始される。
【0034】
ステップ124で、システムは適切な動作を保証するためにチェックされる。例えば制御装置72は各コンポーネントに問合せ、コンポーネントから応答に基づいて制御装置72は動作状態を決定する。制御装置72はさらにエンドエフェクタ14に装荷されている複合材料のタイプとスプール32の各セットにおけるトウの供給を決定する。
【0035】
ステップ126で、エンドエフェクタ14が適切であり、正常運転しているか否かを決定する。例えば制御装置72はエンドエフェクタ14に装荷されている複合材料が適切であるか否かを決定するためにファイル76をアクセスする。複合材料が適切ではないことが決定されたならば、エンドエフェクタ14はステップ128で適切なオフラインエンドエフェクタ30と交換される。複合材料が適切であることが決定されたならば、トウ36はステップ130で与えられる。
【0036】
ステップ128で、エンドエフェクタ14は適切なオフラインエンドエフェクタ30と交換される。例えば位置付け装置12はオフラインステーション28にエンドエフェクタ14を位置付けし、制御装置72は結合を外すように解放装置92を制御する。位置付け装置はさらに適切なオフラインエンドエフェクタ30を選択し、それと結合するように制御され、制御装置72は結合するように解放装置92を制御する。適切なエンドエフェクタを選択することに関して、種々の実施形態では、特定のタイプのトウを有するエンドエフェクタはオフラインステーション28上に予め限定された位置を有することができ、および/またはエンドエフェクタはそこに装荷されたトウのタイプを決定するように構成されることができ、さらにオフラインステーション28上の相対的な位置を決定するように構成されることができる。この情報は制御装置72に転送され、オフラインエンドエフェクタ30のセットから適切なエンドエフェクタを選択するために利用される。このようにして、エンドエフェクタ14は迅速に自動的に交換され、それによって少なくともトウ材料の変更、トウ材料の再供給および糸通し、エンドエフェクタの故障による中断時間を減少または除去する。ステップ128に続いて、新たに設置されたエンドエフェクタ14のシステムチェックがステップ124で行われる。
【0037】
ステップ130で、トウ36は型20に供給される。特にファイル76にしたがって、制御装置72はトウ36を基板26に与えるために積層装置10を調節する。例えばコースの開始位置、通路、最終位置がファイル76から検索され、制御装置72は積層装置10の種々のコンポーネントを調節し、トウ36を開始位置へ取り付け、通路に沿ってトウ36を引き出し、圧縮し、最終位置でトウ36を切断する。
【0038】
ステップ132で、アイテム16のレイアップが終了したか否かが決定される。例えば制御装置72がファイルの最終(“EOF”)ステートメントがファイル76から検索されたことを決定したならば、アイテム16のレイアップが完了したことが決定され、積層装置10はさらに命令が受信されるまでアイドル状態にあるように制御される。さらにレイアッププロトコルがファイル76で与えられたことが決定されたならば、さらにステップ126でエンドエフェクタ14が作動可能でありトウ36が適切に供給されたか否かが決定されることができる。
【0039】
方法120に続いて、アイテム16または複合製品は任意の適当な方法で硬化されることができる。航空宇宙産業では、熱硬化性樹脂が通常プライ材料を予め含浸しておくために使用される。これらの熱硬化性樹脂は典型的に予め定められた時間量において上昇された温度と圧力で硬化される。時間、圧力および温度は使用される樹脂、複合製品の寸法及び厚さ等にしたがって選択されることができる。
【0040】
位置付け装置12により制御されるエンドエフェクタ14の1例が示されているが、他の制御システムも使用されることができることが認識されるであろう。これに関して、ガントリシステム、誘導ビークルまたは任意の適切なエンドエフェクタの動作を支援し制御するその他のこのような位置付け装置はエンドエフェクタ14と共に使用するのに適している。また積層装置10は航空機産業の複合製品でプライを位置付けるのに有用であるが、複合製品を構成する他の産業で使用されることもできる。これらの産業には自動車、船舶、宇宙船、建物、消費者製品を含んでいるが、それらに限定されない。
【0041】
本発明の多くの特徴及び利点は詳細な説明から明白であり、したがって、本発明の技術的範囲内に入る本発明の全てのこのような特徴及び利点は特許請求の範囲によってカバーされることを意図している。さらに多くの変更及び変化が当業者により容易に行われるので、本発明は例示され説明した構造及び動作に正確に限定されることは望んでいない。したがって全ての適切な変更及び等価物は本発明の技術的範囲内に含まれる。
【図面の簡単な説明】
【0042】
【図1】本発明の1実施形態による自動化された積層装置の斜視図。
【図2】図1の積層装置と共に使用するのに適したエンドエフェクタの前面の斜視図。
【図3】図1の積層装置と共に使用するのに適したシステムのブロック図。
【図4】図1の積層装置中で使用するのに適した制御装置に対するシステムアーキテクチャ。
【図5】図1の積層装置による複合アイテムを製造するためのトウを位置付ける方法に含まれるステップを示したフロー図。
【特許請求の範囲】
【請求項1】
複合アイテムを製造するための装置において、
トウを位置付けるためのエンドエフェクタと、
エンドエフェクタを位置付けるための位置付け装置とを具備し、
前記エンドエフェクタは、
トウのスプールを取外し可能に固定するスピンドルと、
圧縮装置と、
スプールから圧縮装置までの通路とを具備し、エンドエフェクタは位置付け装置へ取外し可能に固定されている装置。
【請求項2】
さらに、エンドエフェクタ及び位置付け装置を固定し取外すように電子的に制御可能な解放手段を具備している請求項1記載の装置。
【請求項3】
さらに、複数の交換可能なエンドエフェクタを具備し、位置付け装置は複数の交換可能なエンドエフェクタのうちの1つを取外し可能に固定するように構成されている請求項1記載の装置。
【請求項4】
位置付け装置は複数の交換可能なエンドエフェクタの1つを約20秒以内で複数の交換可能なエンドエフェクタのうちの別のものと置換するように構成されている請求項3記載の装置。
【請求項5】
エンドエフェクタはファイバ、ホイル、プリプレグの切り込み部片、繊維、スリットテープ、テープ、接着フィルム、サーフェイサフィルムの1以上を供給するように構成されている請求項1記載の装置。
【請求項6】
通路はさらに、
再誘導滑車と、
トウの動きを実質的に停止するためのクランプと、
トウを切断するための切断アセンブリと、
トウを圧縮装置へ供給するための再開ローラとを具備している請求項1記載の装置。
【請求項7】
圧縮装置はトウを基板上へ加圧するためのローラを含んでいる請求項1記載の装置。
【請求項8】
圧縮装置はトウを基板上で加圧するためのスイープを含んでいる請求項1記載の装置。
【請求項9】
ツールと、
トウを配置するためのエンドエフェクタと、
ツールに関してエンドエフェクタを位置付けるための主軸台と協動して動作する位置付け装置とを具備している複合アイテムを製造するためのシステムにおいて、
前記ツールは、
その上にトウを供給するマンドレルと、
軸を中心としてマンドレルを回転させる主軸台とを具備し、
前記エンドエフェクタは、
トウのスプールを取外し可能に固定するスピンドルと、
トウをマンドレル上で加圧する圧縮装置と、
スプールから圧縮装置までの通路とを具備し、前記エンドエフェクタは位置付け装置に取外し可能に固定されているシステム。
【請求項10】
さらに、エンドエフェクタ及び位置付け装置を固定し取外すように電子的に制御可能な解放手段を具備している請求項9記載のシステム。
【請求項11】
さらに、オフラインステーションと、
そのオフラインステーション上に配置された複数の交換可能なエンドエフェクタとを具備し、位置付け装置は複数の交換可能なエンドエフェクタの1つを取外し可能に固定するように構成されている請求項9記載のシステム。
【請求項12】
位置付け装置は複数の交換可能なエンドエフェクタの1つを約20秒以内で複数の交換可能なエンドエフェクタの別のものと交換するように構成されている請求項9記載のシステム。
【請求項13】
エンドエフェクタはファイバ、ホイル、プリプレグの切り込み部片、繊維、スリットテープ、テープ、接着フィルム、サーフェイサフィルムの1以上を供給するように構成されている請求項1記載の装置。
【請求項14】
さらに、真空源と、
真空源に流動的に接続され、トウからのバッキングを除去するように構成されている真空ノズルを具備している請求項9記載のシステム。
【請求項15】
さらに、トウからのバッキングを除去するように構成されている巻取りスプールを具備している請求項9記載のシステム。
【請求項16】
トウを型へ供給するための第1のエンドエフェクタを複数のエンドエフェクタから選択し、
第1のエンドエフェクタを位置付け装置へ固定し、
トウを型へ供給する各ステップを含んでいる複合アイテムの製造方法。
【請求項17】
さらに、第1のエンドエフェクタを複数のエンドエフェクタの第2のエンドエフェクタと交換するステップを含んでいる請求項16記載の方法。
【請求項18】
コンピュータの読取可能な命令のファイルにアクセスし、コンピュータの読取可能な命令は複数のタイプのトウから選択された第1のタイプのトウの供給を要求し、
コンピュータの読取可能な命令のセットに応答して第1のエンドエフェクタを選択するステップを含み、この第1のエンドエフェクタは第1のタイプのトウを含んでいる請求項16記載の方法。
【請求項19】
複数のタイプのトウから選択された第2のタイプのトウの供給をコンピュータの読み取り可能な命令が要求したのに応答して、位置付け装置から第1のエンドエフェクタの結合を取外し、
コンピュータの読取可能な命令のセットに応答して複数のエンドエフェクタから第2のエンドエフェクタを選択し、この第2のエンドエフェクタは第2のタイプのトウを含んでおり、
第2のエンドエフェクタを位置付け装置へ固定するステップを含んでいる請求項18記載の方法。
【請求項20】
第1のタイプのトウの供給が予め定められたトウ量よりも下であることに応答して、位置付け装置から第1のエンドエフェクタの結合を解除し、
第1のタイプのトウの供給が予め定められたトウ量よりも下であることに応答して、複数のエンドエフェクタから第3のエンドエフェクタを選択し、この第3のエンドエフェクタは第1のタイプのトウを含んでおり、
第3のエンドエフェクタを位置付け装置へ固定するステップを含んでいる請求項16記載の方法。
【請求項21】
第1のエンドエフェクタの故障に応答して、位置付け装置から第1のエンドエフェクタの結合を解除し、
第1のエンドエフェクタの故障に応答して、複数のエンドエフェクタから第3のエンドエフェクタを選択し、この第3のエンドエフェクタは第1のタイプのトウを含んでおり、
第3のエンドエフェクタを位置付け装置へ固定するステップを含んでいる請求項16記載の方法。
【請求項1】
複合アイテムを製造するための装置において、
トウを位置付けるためのエンドエフェクタと、
エンドエフェクタを位置付けるための位置付け装置とを具備し、
前記エンドエフェクタは、
トウのスプールを取外し可能に固定するスピンドルと、
圧縮装置と、
スプールから圧縮装置までの通路とを具備し、エンドエフェクタは位置付け装置へ取外し可能に固定されている装置。
【請求項2】
さらに、エンドエフェクタ及び位置付け装置を固定し取外すように電子的に制御可能な解放手段を具備している請求項1記載の装置。
【請求項3】
さらに、複数の交換可能なエンドエフェクタを具備し、位置付け装置は複数の交換可能なエンドエフェクタのうちの1つを取外し可能に固定するように構成されている請求項1記載の装置。
【請求項4】
位置付け装置は複数の交換可能なエンドエフェクタの1つを約20秒以内で複数の交換可能なエンドエフェクタのうちの別のものと置換するように構成されている請求項3記載の装置。
【請求項5】
エンドエフェクタはファイバ、ホイル、プリプレグの切り込み部片、繊維、スリットテープ、テープ、接着フィルム、サーフェイサフィルムの1以上を供給するように構成されている請求項1記載の装置。
【請求項6】
通路はさらに、
再誘導滑車と、
トウの動きを実質的に停止するためのクランプと、
トウを切断するための切断アセンブリと、
トウを圧縮装置へ供給するための再開ローラとを具備している請求項1記載の装置。
【請求項7】
圧縮装置はトウを基板上へ加圧するためのローラを含んでいる請求項1記載の装置。
【請求項8】
圧縮装置はトウを基板上で加圧するためのスイープを含んでいる請求項1記載の装置。
【請求項9】
ツールと、
トウを配置するためのエンドエフェクタと、
ツールに関してエンドエフェクタを位置付けるための主軸台と協動して動作する位置付け装置とを具備している複合アイテムを製造するためのシステムにおいて、
前記ツールは、
その上にトウを供給するマンドレルと、
軸を中心としてマンドレルを回転させる主軸台とを具備し、
前記エンドエフェクタは、
トウのスプールを取外し可能に固定するスピンドルと、
トウをマンドレル上で加圧する圧縮装置と、
スプールから圧縮装置までの通路とを具備し、前記エンドエフェクタは位置付け装置に取外し可能に固定されているシステム。
【請求項10】
さらに、エンドエフェクタ及び位置付け装置を固定し取外すように電子的に制御可能な解放手段を具備している請求項9記載のシステム。
【請求項11】
さらに、オフラインステーションと、
そのオフラインステーション上に配置された複数の交換可能なエンドエフェクタとを具備し、位置付け装置は複数の交換可能なエンドエフェクタの1つを取外し可能に固定するように構成されている請求項9記載のシステム。
【請求項12】
位置付け装置は複数の交換可能なエンドエフェクタの1つを約20秒以内で複数の交換可能なエンドエフェクタの別のものと交換するように構成されている請求項9記載のシステム。
【請求項13】
エンドエフェクタはファイバ、ホイル、プリプレグの切り込み部片、繊維、スリットテープ、テープ、接着フィルム、サーフェイサフィルムの1以上を供給するように構成されている請求項1記載の装置。
【請求項14】
さらに、真空源と、
真空源に流動的に接続され、トウからのバッキングを除去するように構成されている真空ノズルを具備している請求項9記載のシステム。
【請求項15】
さらに、トウからのバッキングを除去するように構成されている巻取りスプールを具備している請求項9記載のシステム。
【請求項16】
トウを型へ供給するための第1のエンドエフェクタを複数のエンドエフェクタから選択し、
第1のエンドエフェクタを位置付け装置へ固定し、
トウを型へ供給する各ステップを含んでいる複合アイテムの製造方法。
【請求項17】
さらに、第1のエンドエフェクタを複数のエンドエフェクタの第2のエンドエフェクタと交換するステップを含んでいる請求項16記載の方法。
【請求項18】
コンピュータの読取可能な命令のファイルにアクセスし、コンピュータの読取可能な命令は複数のタイプのトウから選択された第1のタイプのトウの供給を要求し、
コンピュータの読取可能な命令のセットに応答して第1のエンドエフェクタを選択するステップを含み、この第1のエンドエフェクタは第1のタイプのトウを含んでいる請求項16記載の方法。
【請求項19】
複数のタイプのトウから選択された第2のタイプのトウの供給をコンピュータの読み取り可能な命令が要求したのに応答して、位置付け装置から第1のエンドエフェクタの結合を取外し、
コンピュータの読取可能な命令のセットに応答して複数のエンドエフェクタから第2のエンドエフェクタを選択し、この第2のエンドエフェクタは第2のタイプのトウを含んでおり、
第2のエンドエフェクタを位置付け装置へ固定するステップを含んでいる請求項18記載の方法。
【請求項20】
第1のタイプのトウの供給が予め定められたトウ量よりも下であることに応答して、位置付け装置から第1のエンドエフェクタの結合を解除し、
第1のタイプのトウの供給が予め定められたトウ量よりも下であることに応答して、複数のエンドエフェクタから第3のエンドエフェクタを選択し、この第3のエンドエフェクタは第1のタイプのトウを含んでおり、
第3のエンドエフェクタを位置付け装置へ固定するステップを含んでいる請求項16記載の方法。
【請求項21】
第1のエンドエフェクタの故障に応答して、位置付け装置から第1のエンドエフェクタの結合を解除し、
第1のエンドエフェクタの故障に応答して、複数のエンドエフェクタから第3のエンドエフェクタを選択し、この第3のエンドエフェクタは第1のタイプのトウを含んでおり、
第3のエンドエフェクタを位置付け装置へ固定するステップを含んでいる請求項16記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2008−529847(P2008−529847A)
【公表日】平成20年8月7日(2008.8.7)
【国際特許分類】
【出願番号】特願2007−555337(P2007−555337)
【出願日】平成18年2月14日(2006.2.14)
【国際出願番号】PCT/US2006/005144
【国際公開番号】WO2006/088851
【国際公開日】平成18年8月24日(2006.8.24)
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【Fターム(参考)】
【公表日】平成20年8月7日(2008.8.7)
【国際特許分類】
【出願日】平成18年2月14日(2006.2.14)
【国際出願番号】PCT/US2006/005144
【国際公開番号】WO2006/088851
【国際公開日】平成18年8月24日(2006.8.24)
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【Fターム(参考)】
[ Back to top ]