
モニタシステムの制御方法及びモニタシステム
【課題】混合呼気濃度、死腔量、肺胞換気量、肺胞気濃度の毎呼吸測定を可能にするモニタシステムの制御方法及びモニタシステムを提供する。
【解決手段】制御装置3は、フローセンサ13と呼吸ガスセンサ14からの信号を取得して演算装置32で演算処理を実施し、呼吸ガスのCO2濃度FをX軸、換気量VをY軸として表示装置34に設けたX−Y座標上に、1呼吸のCO2濃度−換気量ループを描いてループの面積からCO2排泄量VCO2を計算し、さらにF×V=VCO2となるF−V反比例曲線を描いて、EAST法による演算を実施して、混合呼気CO2濃度FECO2、死腔量VD、肺胞換気量VA、肺胞気CO2濃度FACO2を求めて同一X−Y座標上に表示するとともに、数値表も表示装置34の所定の領域に表示する。
【解決手段】制御装置3は、フローセンサ13と呼吸ガスセンサ14からの信号を取得して演算装置32で演算処理を実施し、呼吸ガスのCO2濃度FをX軸、換気量VをY軸として表示装置34に設けたX−Y座標上に、1呼吸のCO2濃度−換気量ループを描いてループの面積からCO2排泄量VCO2を計算し、さらにF×V=VCO2となるF−V反比例曲線を描いて、EAST法による演算を実施して、混合呼気CO2濃度FECO2、死腔量VD、肺胞換気量VA、肺胞気CO2濃度FACO2を求めて同一X−Y座標上に表示するとともに、数値表も表示装置34の所定の領域に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、呼吸ガスのモニタシステムの制御方法及びモニタシステムに関する。
【背景技術】
【0002】
死腔量、肺胞換気量は、患者の呼吸及び呼吸器を評価する上で極めて重要な指標である。死腔量の概念は、Bohr式 VE×FECO2=(VE−VD)×FACO2によって定義されているが(VEは一回呼気量、FECO2は混合呼気CO2濃度、VDは死腔量、FACO2は肺胞気CO2濃度をそれぞれ表す)、一つには肺胞気濃度FACO2が実測困難であるため、また混合呼気濃度FECO2の測定も、呼気を大量に貯めるなど現実的に困難であるため、臨床の場でそのまま用いられることはなかった。
【0003】
1940年代以降いくつかの方法が提案され、二酸化炭素をモニタするものとしてSBCO2(Single
Breath CO2)モニタが提案されている(例えば、特許文献1参照)。このSBCO2は、二酸化炭素について、一呼気についてのみ、呼気量をX軸に、二酸化炭素濃度をY軸にして波形として描き出すものである。そこから一回呼気量VE、呼気終末二酸化炭素濃度FETCO2の各値が得られ、波形線下の面積から二酸化炭素排泄量VCO2を計算することができるとしている。またこの波形の分析から、死腔量VD、肺胞換気量VAを求めることができるとしている。
またごく最近でもSBCO2法による新たな提案がされており(例えば、非特許文献1参照)、解剖学的死腔、生理学的死腔、肺胞死腔を測定可能としている。
【0004】
他方、時間軸上におけるフローセンサによる一回換気量の変化Vと、呼吸ガスセンサによるCO2、AA、O2、N2O等の各呼吸ガスの濃度変化Cとから、X−Y座標上に同一時点の点(C,V)を連続的に表示させ、一呼吸ごとに濃度−換気量ループを描出する方法が提案されている(例えば、特許文献2参照)。このような表示から、吸入麻酔の二大要素である「量」と「濃度」に関する複数の指標、一回換気量VT・肺胞換気量VA・死腔量VD、あるガス**の吸気濃度FI**・呼気終末濃度ET**・摂取量(又は排泄量)V**を、一つのX−Y座標上で、各濃度−換気量ループの高さ・面積・X軸上の位置などによって、同時かつ直感的にモニタすることができるとしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−24099号公報
【特許文献2】特開2011−45592号公報
【非特許文献】
【0006】
【非特許文献1】Y.Tang,et al.,”A New Equal Area Method to Calculate and Represent Physiologic, Anatomical, and Alveolar Dead Spaces”,Anesthesiology,Vol.104,No.4,pp.696−700,2006.
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、通常、二酸化炭素は吸気中にはほとんど含まれないので、呼気フローだけを対象としている特許文献1に開示されているSBCO2モニタは有効であるが、吸気中にも含まれる他の呼吸ガス、酸素、亜酸化窒素、揮発性麻酔ガスなどの摂取量・排泄量をモニタするのに応用することはできなかった。
【0008】
また、特許文献1、2においても、非特許文献1においても、上記二つの困難、肺胞気濃度FACO2と混合呼気濃度FECO2測定の困難さは依然として解決されておらず、従って前記Bohr式の定義を十分に表現した死腔量、肺胞換気量のモニタリング方法は未だ実現されていないという問題があった。
【0009】
そこで、本発明は上記問題点に鑑みなされたものであって、混合呼気濃度、死腔量、肺胞換気量、肺胞気濃度の毎呼吸測定を可能にするモニタシステムの制御方法及びモニタシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
このような課題を解決するために、本発明のモニタシステムの制御方法は、呼吸回路に設けられ患者の呼吸ガスのフローを連続的に検出するフローセンサと、呼吸回路に設けられ呼吸ガスの成分ガスの濃度を連続的に検出する呼吸ガスセンサと、フローセンサ及び呼吸ガスセンサからの出力データを保存、演算して画像データとし、その画像データを毎呼吸、表示装置に表示する制御装置と、を備えたモニタシステムにおいて、制御装置は、その制御装置の表示装置にX−Y座標を設け、1呼吸毎にそのX−Y座標上にフローセンサによって測定した吸気、呼気連続の呼吸ガスのフローデータすなわち換気量V(Volume)と、呼吸ガスセンサによって測定した吸気、呼気連続の呼吸ガスの成分ガスの1つであるCO2ガスの濃度F(Fraction)とを同期させて、CO2ガスの吸気、呼気連続した濃度−換気量ループを描き、そのループが囲む面積を計算してCO2ガスの排泄量VCO2を求め、そのVCO2を用いてF×V=VCO2となる反比例曲線を表示し、さらに、CO2ガスの濃度Fと換気量Vの関係の変化を、X−Y座標に描いた濃度−換気量ループの原点と、反比例曲線上の任意の1点とを結ぶ直線を対角線とする面積VCO2の長方形の変化としてX−Y座標に表現することを要旨とする。
【0011】
上記発明において、制御装置は、1呼吸毎に、濃度−換気量ループと、その面積であるVCO2を用いて、以下の関係式(1)、(2)を表す面積VCO2の長方形をX−Y座標に表示するとともに、それらの長方形が互いに等面積であることを明示すために、F×V=VCO2となる反比例曲線を表示し、CO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を求めて、X−Y座標に表示する。
VE×(FECO2−FICO2)=VCO2、書き換えると
FECO2=VCO2/VE+FICO2 (1)
VA×(FACO2−FICO2)=VCO2、書き換えると
FACO2=VCO2/VA+FICO2 (2)
(式中のVEは一回呼気量を表す。)
通常の呼吸ではFICO2=0であるので、(1)、(2)式は以下のように表すことができる。
VE×FECO2=VCO2、FECO2=VCO2/VE (1’)
VA×FACO2=VCO2、FACO2=VCO2/VA (2’)
このように等しい面積VCO2を有する複数の長方形が、X−Y座標面上に階段状に配置されるので、この分析法をEAST(Equal Area Step Technology)法と呼ぶ。
【0012】
本発明のモニタシステムの制御方法によれば、呼吸ガス中のCO2ガスの混合呼気濃度FECO2を(1)式によって求め、表示装置のX−Y座標上に描いたCO2ガスの吸気、呼気連続した濃度−換気量ループ上の、求めたFECO2に対応する点のY軸の値から、幾何学的に、肺胞換気量VA、死腔量VDを求めることができる。求めたVAの値から、関係式(2)に相当する面積VCO2の長方形を同じX−Y座標状に描くことにより、やはり幾何学的に、肺胞気濃度FACO2を求めることができる。
【0013】
また、上記発明において、制御装置は、所定の時間連続して、1呼吸毎のCO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、濃度−換気量ループ及び面積VCO2の長方形とともに同一のX−Y座標に表示し、さらにCO2ガスの排泄量VCO2、混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、及び肺胞気濃度FACO2の数値表を作成して、表示装置の所定の領域に表示する。
【0014】
本発明によれば、従来から行われてきた吸気量VI、呼気量VE、呼気終末濃度FETCO2測定に加えて、VCO2、FECO2、VD、VA、FACO2の非侵襲連続モニタリングが可能となる。術中の呼吸管理のみならず、呼吸分析一般に本発明の方法を適用することの臨床的有用性は大きい。
【0015】
また、本発明のモニタシステムは、呼吸回路に設けられ患者の呼吸ガスのフローを連続的に検出するフローセンサと、呼吸回路に設けられ呼吸ガスの成分ガスの濃度を連続的に検出する呼吸ガスセンサと、フローセンサ及び呼吸ガスセンサからの出力データを保存、演算して画像データとし、その画像データを毎呼吸、表示装置に表示する制御装置と、を備え、制御装置の表示装置は、X−Y座標上に1呼吸毎に、フローセンサによって測定した吸気、呼気連続の呼吸ガスのフローデータすなわち換気量Vと、呼吸ガスセンサによって測定した吸気、呼気連続の成分ガスの1つであるCO2ガスの濃度Fとを同期させて得られる、CO2ガスの吸気、呼気連続した濃度−換気量ループと、そのループが囲む面積から求めたCO2ガスの排泄量VCO2を基に演算される、F×V=VCO2となる反比例曲線と、を表示し、さらに、CO2ガスの濃度Fと換気量Vの関係の変化を、X−Y座標に描いた濃度−換気量ループの原点と、反比例曲線上の任意の1点とを結ぶ直線を対角線とする面積VCO2の長方形の変化としてX−Y座標に表現する。
【0016】
本発明のモニタシステムにおいて、制御装置の表示装置は、X−Y座標上に1呼吸毎に、濃度−換気量ループと、その面積であるVCO2を用いて、EAST(Equal Area Step Technology)法により、以下の関係式(1)、(2)を表す面積VCO2の長方形と、F×V=VCO2となる反比例曲線をX−Y座標に描出することによって求められるCO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、面積VCO2の長方形とともに表示する。
VE×FECO2=VCO2、FECO2=VCO2/VE (1’)
VA×FACO2=VCO2、FACO2=VCO2/VA (2’)
【0017】
また、本発明のモニタシステムにおいて、制御装置の表示装置は、所定の時間連続して、1呼吸毎のCO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、濃度−換気量ループ及び面積VCO2の長方形、F×V=VCO2となる反比例曲線とともに同一のX−Y座標に表示し、さらにCO2ガスの排泄量VCO2、混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、及び肺胞気濃度FACO2の数値表を所定の領域に表示する。
【発明の効果】
【0018】
本発明によれば、混合呼気濃度、死腔量、肺胞換気量、肺胞気濃度の毎呼吸測定を可能にするモニタシステムの制御方法及びモニタシステムを提供することができる。
【図面の簡単な説明】
【0019】
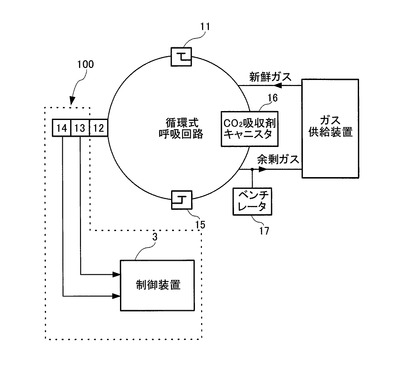
【図1】本発明の実施形態に係るモニタシステムを、循環式呼吸回路を有する吸入麻酔システムに適用した場合を説明する図である。
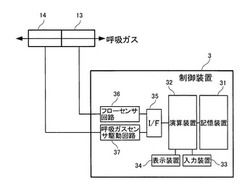
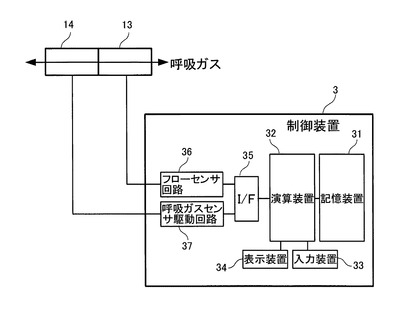
【図2】本発明の実施形態に係るモニタシステムの、フローセンサ、呼吸ガスセンサと制御装置との接続関係を示す図である。
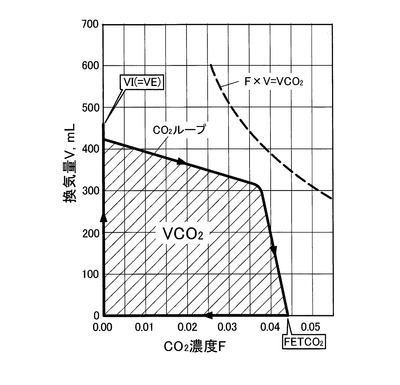
【図3】本発明の実施形態に係る、CO2の濃度−換気量ループと、F×V=VCO2反比例曲線を示す図である。
【図4】本発明の実施形態に係る、CO2に関するEAST法を説明する図である。
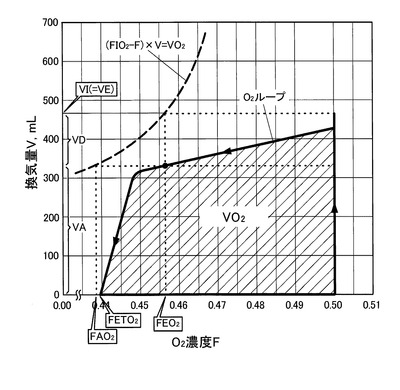
【図5】本発明の実施形態に係る、O2に関するEAST法を説明する図である。
【発明を実施するための形態】
【0020】
以下、添付図面を参照して、本発明を実施するための形態(以下、実施形態という。)について詳細に説明する。
【0021】
図1は、本発明の実施形態に係るモニタシステムを、循環式呼吸回路を有する吸入麻酔システムに適用した場合を説明する図である。図1に示すように、モニタシステム100は、制御装置3、フローセンサ13、呼吸ガスセンサ14を有する。
【0022】
吸入麻酔システムは、循環式呼吸回路1、ガス供給装置2、ベンチレータ17から構成される。呼吸回路1は、吸気弁11、患者とつながるコネクタ12、呼気弁15、CO2吸収剤キャニスタ16を有する。吸気弁11は、呼吸回路1から患者へのガス(吸気)の流れは許容するものの、その逆の流れは規制するように作動する。呼気弁11は、患者からの呼気の一部をCO2吸収剤キャニスタ26へ導き再利用する、また残りの一部を余剰ガスとして廃棄する、その流れは許容するものの、その逆の流れは規制するように作動する。CO2吸収剤キャニスタ26は、患者の呼気から二酸化炭素を吸収除去し、その他の麻酔呼吸ガス、O2ガス等を吸気の一部として循環使用するためのものである。
【0023】
コネクタ12には、フローセンサ13と呼吸ガスセンサ14が、順不同で直列に設置されている。フローセンサ13は、呼吸の時間軸上でのボリューム変化を検出し、さらにそこから一回換気量(VI、VE)を測定する。呼吸ガスセンサ14は、例えばメインストリーム型のマルチガスセンサモジュールによって構成され、呼吸ガスの成分ガスの時間軸上での濃度変化を検出し、さらにそこから吸気濃度と呼気終末濃度を測定する。ここではフローセンサ13と呼吸ガスセンサ14は、二酸化炭素(CO2)、酸素(O2)、揮発性麻酔ガス(AA)、亜酸化窒素(N2O)の混合した呼吸ガスを測定対象とすることができる。O2の濃度を調節する場合や、AA、N2Oの麻酔ガスを供給及び調節する場合は、ガス供給装置2を使用する。ベンチレータ17は、患者の呼吸を補助、または強制換気するために使用される。
【0024】
フローセンサ13及び呼吸ガスセンサ14と、制御装置3の接続関係を図2に示す。通過する呼吸ガスによって、フローセンサ13と呼吸ガスセンサ14のそれぞれにおいて検出された信号は、制御装置3に供給される。
【0025】
制御装置3は、記憶装置31と、演算装置32と、入力装置33と、表示装置34とを備える。
【0026】
演算装置32は、インタフェース(I/F)35を介して、フローセンサ回路36と呼吸ガスセンサ駆動回路37とに接続され、フローセンサ13からの信号を取得するとともに、呼吸ガスセンサ駆動回路37を介して呼吸ガスセンサ14を制御して信号を取得し、これら信号データの処理を行う演算を実施する。演算装置32に接続された記憶装置31には、演算装置32で実行する種々の演算に必要な、呼吸ガスセンサ駆動手順記憶手段、信号データ記憶手段、プログラム記憶手段、演算手順記憶手段等を含む手段が格納される。
【0027】
図2に示した制御装置のハードウエア構成は、記憶装置31、演算装置32、入力装置33、出力装置34を備えるノイマン型コンピュータのハードウエア構成である。データ記憶、プログラム記憶には、ノイマン型コンピュータの主記憶装置又は補助記憶装置を使用することができる。主記憶装置としては、揮発性のDRAMを用いることが多く、補助記憶装置としては、ハードディスク(HD)等の磁気ディスク、磁気テープ、光ディスク、光磁気ディスク、RAMディスク、USBフラッシュメモリ等が使用できる。演算装置32が実施する演算の1部を、別の演算装置(CPU)や別のコンピュータシステムによるハードウエア構成のとして実現することもできる。また、演算装置32には、タッチパネル、キーボード、マウス等の入力装置33、プリンタ及びディスプレイ等の出力装置34が接続されている。
【0028】
ガス分析法はメインストリームによるガス分析法を用いるのが好ましい。従来主流のサイドストリームによるガス分析法では、口元から吸気ガス・呼気ガスを毎分100mL前後連続サンプリングし、離れた場所にあるセンサで検出し、時間軸上での濃度変化と、吸気濃度・呼気終末濃度を測定し表示している。このため、サンプリング中の混合による濃度変化に対する反応の遅れ、測定までの時間差などによって、一回換気量データと一体的に扱うことが困難であった。患者口元で、CO2/O2/N2O/AAなどの呼吸ガス濃度を毎呼吸連続モニタできる、メインストリーム型のガスセンサモジュールが臨床実用に耐えるものとなったことによって、一回換気量と呼吸ガス濃度のデータを同じ時間軸で一体的に扱うことができるようになった。
【0029】
図3は、本発明の実施形態に係る、1呼吸における呼吸ガス中のCO2の濃度−換気量ループと、F×V=VCO2反比例曲線を、濃度FをX軸、換気量VをY軸としたX−Y座標上に示した図である。
【0030】
図3のCO2濃度−換気量ループ上の矢印で示したように、通常、吸気中にはCO2は含まれないので、吸気時にはCO2濃度−換気量ループはY軸上を立ち上って、図中の吸気量VI(=呼気量VE)を表す点に達する。大気中には約21%のO2が含まれるが、吸気時に気道から肺へ入ったO2ガスは、肺胞からその毛細血管の血液へ移動する。この移動を摂取と呼ぶ。他方、組織で発生したCO2は静脈血に溶け込んで心臓にもどり、肺動脈を通って肺胞の毛細血管で、酸素と入れ替わる形で肺胞へ移動する。この移動を排泄と呼ぶ。VI(=VE)点で吸気から呼気に変わると、CO2の排泄が始まり、図3のCO2濃度−換気量ループ上の矢印で示したように、呼気中CO2濃度Fは徐々に増加して、図中の呼気終末CO2濃度を表すFETCO2の点に達して1回の呼吸を終了する。このCO2濃度−換気量ループで囲まれる面積を計算すると、CO2排泄量VCO2を求めることができる。
【0031】
ここまで、吸気量VI=呼気量VEとして説明した。しかし、患者に接続される気管チューブやマスクにリークが存在する場合や、一呼吸あたりにすると数ミリリットルと僅かではあるが、通常酸素摂取量VO2の方が二酸化炭素排泄量VCO2より多い等の理由によって、VI>VEとなることがある。その場合、図3のCO2濃度−換気量ループの下部は(VI−VE)だけ、VCO2の面積計算から除外され、合わせて他の関係式も調整されなければならない。
【0032】
図3に示したF×V=VCO2となるF−V反比例曲線上の1点と、X−Y座標軸の原点を結ぶ直線を対角線とする長方形はすべて同じ面積VCO2を有する。以下、X−Y座標軸に描いたCO2濃度−換気量ループとF−V反比例曲線を用いて、EAST(Equal Area Step Technology)法により、混合呼気濃度FECO2、VD(死腔量)、VA(肺胞換気量)、FACO2(肺胞気CO2濃度)を求める方法について図4を参照して説明する。
【0033】
C.BohrはBohr式として知られる(3)の関係式を提案した(C.Bohr,”Ueber die lungatmung”,Skand Arch Physiol,vol.22,pp.236−238,1891参照)。
VE×FECO2=(VE−VD)×FACO2 (3)
(式中、VEは一回呼気量を、FECO2は混合呼気CO2濃度を、VDは死腔量を、FACO2は肺胞気CO2濃度を表す)。
ここで、VE−VDは肺胞換気量VAを表し、VAは均質な肺胞気CO2濃度FACO2で満たされた理想肺胞気空間を意味する。
【0034】
FACO2を求めるために、まず1呼吸のCO2濃度−換気量ループからVCO2(CO2排泄量)を計算する(図4の丸囲み数字1)。
【0035】
次に、V=VEの直線とF−V反比例曲線F×V=VCO2との交点を求めると、この交点においては(1’)式が成り立つので、
VE×FECO2=VCO2、FECO2=VCO2/VE (1’)
交点のX座標はFECO2(混合呼気CO2濃度)となる(図4の丸囲み数字2)。
【0036】
次に、X=FECO2の直線と、CO2濃度−換気量ループとの交点(図4の丸囲み数字3)を求めると、この交点のY座標はVA(肺胞換気量)を表し、従って、VE=VA+VDの関係からVE(一回呼気量)をVA(肺胞換気量)とVD(死腔量)とに別けることができる。
【0037】
次に、Y=VAの直線と、F−V反比例曲線F×V=VCO2との交点を求めると、この交点においては(2’)式が成り立つので、
VA×FACO2=VCO2、FACO2=VCO2/VA (2’)
交点のX座標はFACO2(肺胞気CO2濃度)となる(図3の丸囲み数字4)。
【0038】
本発明の実施形態においては、制御装置3は、所定の時間連続して、1呼吸毎のCO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、CO2濃度−換気量ループ及び面積VCO2の長方形、F×V=VCO2となる反比例曲線とともに同一の前記X−Y座標に表示し、さらにCO2ガスの排泄量VCO2、混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、及び肺胞気濃度FACO2の数値表を経時変化が一目でわかるような構成で作成して、液晶ディスプレイ等の表示装置34の所定の領域に表示する。
【0039】
表示装置34には、連続する2呼吸分又は数呼吸分を繰り返し表示してもよい。また、X−Y座標にはCO2濃度−換気量ループのみを表示して、呼吸機能の変化を視覚的に捉えられるようにし、CO2ガスの排泄量VCO2、混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、及び肺胞気濃度FACO2の正確な数値は、X−Y座標と同一画面に表示した数値表から読み取るようにしてもよい。各呼吸毎の個々の数値から、例えば一分間の複数呼吸分について、平均値、標準偏差等を求める統計的演算処理を行い、数値表に個々の数値とともに表示することも臨床上有用である。
【0040】
本発明の実施形態では、呼吸ガス中のCO2のモニタシステムの制御方法及びモニタシステムについて説明してきたが、吸入式麻酔の呼吸ガスに含まれる、二酸化炭素CO2、揮発性麻酔ガスAA、酸素O2、亜酸化窒素N2O等のいずれのガスにも本発明を適用することができる。
【0041】
図5は、濃度Fが0.5のO2を含む吸入ガスを供給した場合の、O2に関するEAST法の適用を示した図である。
【0042】
CO2の(1)、(2)、(3)式を、O2に置き換えると、それぞれに対応して下記の(4)、(5)、(6)式が得られる。
VE×(FIO2−FEO2)=VO2、書き換えると
FEO2=FIO2−VO2/VE (4)
VA×(FIO2−FAO2)=VO2、書き換えると
FAO2=FIO2−VO2/VA (5)
VE×(FIO2−FEO2)=VA×(FIO2−FAO2) (6)
(式中、VEは一回呼気量を、VO2は酸素摂取量を、FEO2は混合呼気O2濃度を、VDは死腔量を、VAは肺胞換気量を、FAO2は肺胞気O2濃度を表す)。
【0043】
CO2の場合と同様に、X−Y座標上にO2濃度−換気量ループを描いて、その面積から酸素摂取量VO2を計算し、同じX−Y座標上に(FIO2−F)×V=VO2となるF−V反比例曲線を描き、次いで、(4)、(5)、(6)式を用い、上記CO2に関して実施したのと同様のEAST法の手順を実施することにより、FEO2、VD、VA、FAO2を求めて、O2濃度−換気量ループ及びF−V反比例曲線を描いたX−Y座標、並びに数値表を、毎呼吸、表示装置34に表示することができる。
【0044】
呼吸ガスに含まれる、二酸化炭素CO2、揮発性麻酔ガスAA、酸素O2、亜酸化窒素N2O等の、1呼吸毎の各成分ガスの濃度−換気量ループ及びF−V反比例曲線を、同一X−Y座標上に所定の時間又は連続する複数回呼吸にわたって描き、対応する数値表とともに表示装置34に表示すると、被験者の状態の微妙な変化を視覚的にかつ数値的に同時に認知することができ、臨床的有用性は大きい。
【0045】
本発明を、揮発性麻酔ガスAA、亜酸化窒素N2O等の麻酔ガスの吸入に適用すると、それぞれのガスの摂取量または排泄量VAA、VN2O、混合呼気濃度FEAA、FEN2O、肺胞気濃度FAAA、FAN2Oを毎呼吸モニタリングすることが可能となる。従来、麻酔深度の指標としては、呼気終末濃度FETAA、FETN2Oが用いられてきたが、より信頼性の高い指標、つまり血中濃度により近い指標を手に入れることができるようになる。
【0046】
本発明の実施形態から、以下のことが明らかとなった。
(イ)本発明は、VCO2、FECO2、VD、VA、FACO2などの無侵襲連続モニタリングを可能とするものであり、臨床的有用性は大きい。
(ロ)この技術は二酸化炭素に止まらず、酸素、揮発性麻酔ガス、亜酸化窒素等の測定可能な他の呼吸ガスへも展開できる。特に、CO2と同様な分析がO2にも応用されることの、臨床的な意義は極めて大きい。
(ハ)麻酔ガス摂取の分析に応用されると、より信頼性の高い麻酔深度の指標を得ることができる。
(ニ)これらの技術は術中の呼吸管理にとどまらず、幅広く呼吸分析一般に応用可能である。
【0047】
以上、実施形態を用いて本発明を説明したが、本発明の技術的範囲は上記実施形態に記載の範囲には限定されないことは言うまでもない。上記実施形態に、多様な変更または改良を加えることが可能であることが、当業者には明らかである。また、その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【符号の説明】
【0048】
1 循環式呼吸回路
2 ガス供給装置
3 制御装置
11 吸気弁
12 コネクタ
13 フローセンサ
14 呼吸ガスセンサ
15 呼気弁
16 CO2吸収剤キャニスタ
17 ベンチレータ
31 記憶装置
32 演算装置
33 入力装置
34 表示装置
35 インタフェース(I/F)
36 フローセンサ回路
37 呼吸ガスセンサ駆動回路
100 モニタシステム
【技術分野】
【0001】
本発明は、呼吸ガスのモニタシステムの制御方法及びモニタシステムに関する。
【背景技術】
【0002】
死腔量、肺胞換気量は、患者の呼吸及び呼吸器を評価する上で極めて重要な指標である。死腔量の概念は、Bohr式 VE×FECO2=(VE−VD)×FACO2によって定義されているが(VEは一回呼気量、FECO2は混合呼気CO2濃度、VDは死腔量、FACO2は肺胞気CO2濃度をそれぞれ表す)、一つには肺胞気濃度FACO2が実測困難であるため、また混合呼気濃度FECO2の測定も、呼気を大量に貯めるなど現実的に困難であるため、臨床の場でそのまま用いられることはなかった。
【0003】
1940年代以降いくつかの方法が提案され、二酸化炭素をモニタするものとしてSBCO2(Single
Breath CO2)モニタが提案されている(例えば、特許文献1参照)。このSBCO2は、二酸化炭素について、一呼気についてのみ、呼気量をX軸に、二酸化炭素濃度をY軸にして波形として描き出すものである。そこから一回呼気量VE、呼気終末二酸化炭素濃度FETCO2の各値が得られ、波形線下の面積から二酸化炭素排泄量VCO2を計算することができるとしている。またこの波形の分析から、死腔量VD、肺胞換気量VAを求めることができるとしている。
またごく最近でもSBCO2法による新たな提案がされており(例えば、非特許文献1参照)、解剖学的死腔、生理学的死腔、肺胞死腔を測定可能としている。
【0004】
他方、時間軸上におけるフローセンサによる一回換気量の変化Vと、呼吸ガスセンサによるCO2、AA、O2、N2O等の各呼吸ガスの濃度変化Cとから、X−Y座標上に同一時点の点(C,V)を連続的に表示させ、一呼吸ごとに濃度−換気量ループを描出する方法が提案されている(例えば、特許文献2参照)。このような表示から、吸入麻酔の二大要素である「量」と「濃度」に関する複数の指標、一回換気量VT・肺胞換気量VA・死腔量VD、あるガス**の吸気濃度FI**・呼気終末濃度ET**・摂取量(又は排泄量)V**を、一つのX−Y座標上で、各濃度−換気量ループの高さ・面積・X軸上の位置などによって、同時かつ直感的にモニタすることができるとしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−24099号公報
【特許文献2】特開2011−45592号公報
【非特許文献】
【0006】
【非特許文献1】Y.Tang,et al.,”A New Equal Area Method to Calculate and Represent Physiologic, Anatomical, and Alveolar Dead Spaces”,Anesthesiology,Vol.104,No.4,pp.696−700,2006.
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、通常、二酸化炭素は吸気中にはほとんど含まれないので、呼気フローだけを対象としている特許文献1に開示されているSBCO2モニタは有効であるが、吸気中にも含まれる他の呼吸ガス、酸素、亜酸化窒素、揮発性麻酔ガスなどの摂取量・排泄量をモニタするのに応用することはできなかった。
【0008】
また、特許文献1、2においても、非特許文献1においても、上記二つの困難、肺胞気濃度FACO2と混合呼気濃度FECO2測定の困難さは依然として解決されておらず、従って前記Bohr式の定義を十分に表現した死腔量、肺胞換気量のモニタリング方法は未だ実現されていないという問題があった。
【0009】
そこで、本発明は上記問題点に鑑みなされたものであって、混合呼気濃度、死腔量、肺胞換気量、肺胞気濃度の毎呼吸測定を可能にするモニタシステムの制御方法及びモニタシステムを提供することを目的とする。
【課題を解決するための手段】
【0010】
このような課題を解決するために、本発明のモニタシステムの制御方法は、呼吸回路に設けられ患者の呼吸ガスのフローを連続的に検出するフローセンサと、呼吸回路に設けられ呼吸ガスの成分ガスの濃度を連続的に検出する呼吸ガスセンサと、フローセンサ及び呼吸ガスセンサからの出力データを保存、演算して画像データとし、その画像データを毎呼吸、表示装置に表示する制御装置と、を備えたモニタシステムにおいて、制御装置は、その制御装置の表示装置にX−Y座標を設け、1呼吸毎にそのX−Y座標上にフローセンサによって測定した吸気、呼気連続の呼吸ガスのフローデータすなわち換気量V(Volume)と、呼吸ガスセンサによって測定した吸気、呼気連続の呼吸ガスの成分ガスの1つであるCO2ガスの濃度F(Fraction)とを同期させて、CO2ガスの吸気、呼気連続した濃度−換気量ループを描き、そのループが囲む面積を計算してCO2ガスの排泄量VCO2を求め、そのVCO2を用いてF×V=VCO2となる反比例曲線を表示し、さらに、CO2ガスの濃度Fと換気量Vの関係の変化を、X−Y座標に描いた濃度−換気量ループの原点と、反比例曲線上の任意の1点とを結ぶ直線を対角線とする面積VCO2の長方形の変化としてX−Y座標に表現することを要旨とする。
【0011】
上記発明において、制御装置は、1呼吸毎に、濃度−換気量ループと、その面積であるVCO2を用いて、以下の関係式(1)、(2)を表す面積VCO2の長方形をX−Y座標に表示するとともに、それらの長方形が互いに等面積であることを明示すために、F×V=VCO2となる反比例曲線を表示し、CO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を求めて、X−Y座標に表示する。
VE×(FECO2−FICO2)=VCO2、書き換えると
FECO2=VCO2/VE+FICO2 (1)
VA×(FACO2−FICO2)=VCO2、書き換えると
FACO2=VCO2/VA+FICO2 (2)
(式中のVEは一回呼気量を表す。)
通常の呼吸ではFICO2=0であるので、(1)、(2)式は以下のように表すことができる。
VE×FECO2=VCO2、FECO2=VCO2/VE (1’)
VA×FACO2=VCO2、FACO2=VCO2/VA (2’)
このように等しい面積VCO2を有する複数の長方形が、X−Y座標面上に階段状に配置されるので、この分析法をEAST(Equal Area Step Technology)法と呼ぶ。
【0012】
本発明のモニタシステムの制御方法によれば、呼吸ガス中のCO2ガスの混合呼気濃度FECO2を(1)式によって求め、表示装置のX−Y座標上に描いたCO2ガスの吸気、呼気連続した濃度−換気量ループ上の、求めたFECO2に対応する点のY軸の値から、幾何学的に、肺胞換気量VA、死腔量VDを求めることができる。求めたVAの値から、関係式(2)に相当する面積VCO2の長方形を同じX−Y座標状に描くことにより、やはり幾何学的に、肺胞気濃度FACO2を求めることができる。
【0013】
また、上記発明において、制御装置は、所定の時間連続して、1呼吸毎のCO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、濃度−換気量ループ及び面積VCO2の長方形とともに同一のX−Y座標に表示し、さらにCO2ガスの排泄量VCO2、混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、及び肺胞気濃度FACO2の数値表を作成して、表示装置の所定の領域に表示する。
【0014】
本発明によれば、従来から行われてきた吸気量VI、呼気量VE、呼気終末濃度FETCO2測定に加えて、VCO2、FECO2、VD、VA、FACO2の非侵襲連続モニタリングが可能となる。術中の呼吸管理のみならず、呼吸分析一般に本発明の方法を適用することの臨床的有用性は大きい。
【0015】
また、本発明のモニタシステムは、呼吸回路に設けられ患者の呼吸ガスのフローを連続的に検出するフローセンサと、呼吸回路に設けられ呼吸ガスの成分ガスの濃度を連続的に検出する呼吸ガスセンサと、フローセンサ及び呼吸ガスセンサからの出力データを保存、演算して画像データとし、その画像データを毎呼吸、表示装置に表示する制御装置と、を備え、制御装置の表示装置は、X−Y座標上に1呼吸毎に、フローセンサによって測定した吸気、呼気連続の呼吸ガスのフローデータすなわち換気量Vと、呼吸ガスセンサによって測定した吸気、呼気連続の成分ガスの1つであるCO2ガスの濃度Fとを同期させて得られる、CO2ガスの吸気、呼気連続した濃度−換気量ループと、そのループが囲む面積から求めたCO2ガスの排泄量VCO2を基に演算される、F×V=VCO2となる反比例曲線と、を表示し、さらに、CO2ガスの濃度Fと換気量Vの関係の変化を、X−Y座標に描いた濃度−換気量ループの原点と、反比例曲線上の任意の1点とを結ぶ直線を対角線とする面積VCO2の長方形の変化としてX−Y座標に表現する。
【0016】
本発明のモニタシステムにおいて、制御装置の表示装置は、X−Y座標上に1呼吸毎に、濃度−換気量ループと、その面積であるVCO2を用いて、EAST(Equal Area Step Technology)法により、以下の関係式(1)、(2)を表す面積VCO2の長方形と、F×V=VCO2となる反比例曲線をX−Y座標に描出することによって求められるCO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、面積VCO2の長方形とともに表示する。
VE×FECO2=VCO2、FECO2=VCO2/VE (1’)
VA×FACO2=VCO2、FACO2=VCO2/VA (2’)
【0017】
また、本発明のモニタシステムにおいて、制御装置の表示装置は、所定の時間連続して、1呼吸毎のCO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、濃度−換気量ループ及び面積VCO2の長方形、F×V=VCO2となる反比例曲線とともに同一のX−Y座標に表示し、さらにCO2ガスの排泄量VCO2、混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、及び肺胞気濃度FACO2の数値表を所定の領域に表示する。
【発明の効果】
【0018】
本発明によれば、混合呼気濃度、死腔量、肺胞換気量、肺胞気濃度の毎呼吸測定を可能にするモニタシステムの制御方法及びモニタシステムを提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係るモニタシステムを、循環式呼吸回路を有する吸入麻酔システムに適用した場合を説明する図である。
【図2】本発明の実施形態に係るモニタシステムの、フローセンサ、呼吸ガスセンサと制御装置との接続関係を示す図である。
【図3】本発明の実施形態に係る、CO2の濃度−換気量ループと、F×V=VCO2反比例曲線を示す図である。
【図4】本発明の実施形態に係る、CO2に関するEAST法を説明する図である。
【図5】本発明の実施形態に係る、O2に関するEAST法を説明する図である。
【発明を実施するための形態】
【0020】
以下、添付図面を参照して、本発明を実施するための形態(以下、実施形態という。)について詳細に説明する。
【0021】
図1は、本発明の実施形態に係るモニタシステムを、循環式呼吸回路を有する吸入麻酔システムに適用した場合を説明する図である。図1に示すように、モニタシステム100は、制御装置3、フローセンサ13、呼吸ガスセンサ14を有する。
【0022】
吸入麻酔システムは、循環式呼吸回路1、ガス供給装置2、ベンチレータ17から構成される。呼吸回路1は、吸気弁11、患者とつながるコネクタ12、呼気弁15、CO2吸収剤キャニスタ16を有する。吸気弁11は、呼吸回路1から患者へのガス(吸気)の流れは許容するものの、その逆の流れは規制するように作動する。呼気弁11は、患者からの呼気の一部をCO2吸収剤キャニスタ26へ導き再利用する、また残りの一部を余剰ガスとして廃棄する、その流れは許容するものの、その逆の流れは規制するように作動する。CO2吸収剤キャニスタ26は、患者の呼気から二酸化炭素を吸収除去し、その他の麻酔呼吸ガス、O2ガス等を吸気の一部として循環使用するためのものである。
【0023】
コネクタ12には、フローセンサ13と呼吸ガスセンサ14が、順不同で直列に設置されている。フローセンサ13は、呼吸の時間軸上でのボリューム変化を検出し、さらにそこから一回換気量(VI、VE)を測定する。呼吸ガスセンサ14は、例えばメインストリーム型のマルチガスセンサモジュールによって構成され、呼吸ガスの成分ガスの時間軸上での濃度変化を検出し、さらにそこから吸気濃度と呼気終末濃度を測定する。ここではフローセンサ13と呼吸ガスセンサ14は、二酸化炭素(CO2)、酸素(O2)、揮発性麻酔ガス(AA)、亜酸化窒素(N2O)の混合した呼吸ガスを測定対象とすることができる。O2の濃度を調節する場合や、AA、N2Oの麻酔ガスを供給及び調節する場合は、ガス供給装置2を使用する。ベンチレータ17は、患者の呼吸を補助、または強制換気するために使用される。
【0024】
フローセンサ13及び呼吸ガスセンサ14と、制御装置3の接続関係を図2に示す。通過する呼吸ガスによって、フローセンサ13と呼吸ガスセンサ14のそれぞれにおいて検出された信号は、制御装置3に供給される。
【0025】
制御装置3は、記憶装置31と、演算装置32と、入力装置33と、表示装置34とを備える。
【0026】
演算装置32は、インタフェース(I/F)35を介して、フローセンサ回路36と呼吸ガスセンサ駆動回路37とに接続され、フローセンサ13からの信号を取得するとともに、呼吸ガスセンサ駆動回路37を介して呼吸ガスセンサ14を制御して信号を取得し、これら信号データの処理を行う演算を実施する。演算装置32に接続された記憶装置31には、演算装置32で実行する種々の演算に必要な、呼吸ガスセンサ駆動手順記憶手段、信号データ記憶手段、プログラム記憶手段、演算手順記憶手段等を含む手段が格納される。
【0027】
図2に示した制御装置のハードウエア構成は、記憶装置31、演算装置32、入力装置33、出力装置34を備えるノイマン型コンピュータのハードウエア構成である。データ記憶、プログラム記憶には、ノイマン型コンピュータの主記憶装置又は補助記憶装置を使用することができる。主記憶装置としては、揮発性のDRAMを用いることが多く、補助記憶装置としては、ハードディスク(HD)等の磁気ディスク、磁気テープ、光ディスク、光磁気ディスク、RAMディスク、USBフラッシュメモリ等が使用できる。演算装置32が実施する演算の1部を、別の演算装置(CPU)や別のコンピュータシステムによるハードウエア構成のとして実現することもできる。また、演算装置32には、タッチパネル、キーボード、マウス等の入力装置33、プリンタ及びディスプレイ等の出力装置34が接続されている。
【0028】
ガス分析法はメインストリームによるガス分析法を用いるのが好ましい。従来主流のサイドストリームによるガス分析法では、口元から吸気ガス・呼気ガスを毎分100mL前後連続サンプリングし、離れた場所にあるセンサで検出し、時間軸上での濃度変化と、吸気濃度・呼気終末濃度を測定し表示している。このため、サンプリング中の混合による濃度変化に対する反応の遅れ、測定までの時間差などによって、一回換気量データと一体的に扱うことが困難であった。患者口元で、CO2/O2/N2O/AAなどの呼吸ガス濃度を毎呼吸連続モニタできる、メインストリーム型のガスセンサモジュールが臨床実用に耐えるものとなったことによって、一回換気量と呼吸ガス濃度のデータを同じ時間軸で一体的に扱うことができるようになった。
【0029】
図3は、本発明の実施形態に係る、1呼吸における呼吸ガス中のCO2の濃度−換気量ループと、F×V=VCO2反比例曲線を、濃度FをX軸、換気量VをY軸としたX−Y座標上に示した図である。
【0030】
図3のCO2濃度−換気量ループ上の矢印で示したように、通常、吸気中にはCO2は含まれないので、吸気時にはCO2濃度−換気量ループはY軸上を立ち上って、図中の吸気量VI(=呼気量VE)を表す点に達する。大気中には約21%のO2が含まれるが、吸気時に気道から肺へ入ったO2ガスは、肺胞からその毛細血管の血液へ移動する。この移動を摂取と呼ぶ。他方、組織で発生したCO2は静脈血に溶け込んで心臓にもどり、肺動脈を通って肺胞の毛細血管で、酸素と入れ替わる形で肺胞へ移動する。この移動を排泄と呼ぶ。VI(=VE)点で吸気から呼気に変わると、CO2の排泄が始まり、図3のCO2濃度−換気量ループ上の矢印で示したように、呼気中CO2濃度Fは徐々に増加して、図中の呼気終末CO2濃度を表すFETCO2の点に達して1回の呼吸を終了する。このCO2濃度−換気量ループで囲まれる面積を計算すると、CO2排泄量VCO2を求めることができる。
【0031】
ここまで、吸気量VI=呼気量VEとして説明した。しかし、患者に接続される気管チューブやマスクにリークが存在する場合や、一呼吸あたりにすると数ミリリットルと僅かではあるが、通常酸素摂取量VO2の方が二酸化炭素排泄量VCO2より多い等の理由によって、VI>VEとなることがある。その場合、図3のCO2濃度−換気量ループの下部は(VI−VE)だけ、VCO2の面積計算から除外され、合わせて他の関係式も調整されなければならない。
【0032】
図3に示したF×V=VCO2となるF−V反比例曲線上の1点と、X−Y座標軸の原点を結ぶ直線を対角線とする長方形はすべて同じ面積VCO2を有する。以下、X−Y座標軸に描いたCO2濃度−換気量ループとF−V反比例曲線を用いて、EAST(Equal Area Step Technology)法により、混合呼気濃度FECO2、VD(死腔量)、VA(肺胞換気量)、FACO2(肺胞気CO2濃度)を求める方法について図4を参照して説明する。
【0033】
C.BohrはBohr式として知られる(3)の関係式を提案した(C.Bohr,”Ueber die lungatmung”,Skand Arch Physiol,vol.22,pp.236−238,1891参照)。
VE×FECO2=(VE−VD)×FACO2 (3)
(式中、VEは一回呼気量を、FECO2は混合呼気CO2濃度を、VDは死腔量を、FACO2は肺胞気CO2濃度を表す)。
ここで、VE−VDは肺胞換気量VAを表し、VAは均質な肺胞気CO2濃度FACO2で満たされた理想肺胞気空間を意味する。
【0034】
FACO2を求めるために、まず1呼吸のCO2濃度−換気量ループからVCO2(CO2排泄量)を計算する(図4の丸囲み数字1)。
【0035】
次に、V=VEの直線とF−V反比例曲線F×V=VCO2との交点を求めると、この交点においては(1’)式が成り立つので、
VE×FECO2=VCO2、FECO2=VCO2/VE (1’)
交点のX座標はFECO2(混合呼気CO2濃度)となる(図4の丸囲み数字2)。
【0036】
次に、X=FECO2の直線と、CO2濃度−換気量ループとの交点(図4の丸囲み数字3)を求めると、この交点のY座標はVA(肺胞換気量)を表し、従って、VE=VA+VDの関係からVE(一回呼気量)をVA(肺胞換気量)とVD(死腔量)とに別けることができる。
【0037】
次に、Y=VAの直線と、F−V反比例曲線F×V=VCO2との交点を求めると、この交点においては(2’)式が成り立つので、
VA×FACO2=VCO2、FACO2=VCO2/VA (2’)
交点のX座標はFACO2(肺胞気CO2濃度)となる(図3の丸囲み数字4)。
【0038】
本発明の実施形態においては、制御装置3は、所定の時間連続して、1呼吸毎のCO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、CO2濃度−換気量ループ及び面積VCO2の長方形、F×V=VCO2となる反比例曲線とともに同一の前記X−Y座標に表示し、さらにCO2ガスの排泄量VCO2、混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、及び肺胞気濃度FACO2の数値表を経時変化が一目でわかるような構成で作成して、液晶ディスプレイ等の表示装置34の所定の領域に表示する。
【0039】
表示装置34には、連続する2呼吸分又は数呼吸分を繰り返し表示してもよい。また、X−Y座標にはCO2濃度−換気量ループのみを表示して、呼吸機能の変化を視覚的に捉えられるようにし、CO2ガスの排泄量VCO2、混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、及び肺胞気濃度FACO2の正確な数値は、X−Y座標と同一画面に表示した数値表から読み取るようにしてもよい。各呼吸毎の個々の数値から、例えば一分間の複数呼吸分について、平均値、標準偏差等を求める統計的演算処理を行い、数値表に個々の数値とともに表示することも臨床上有用である。
【0040】
本発明の実施形態では、呼吸ガス中のCO2のモニタシステムの制御方法及びモニタシステムについて説明してきたが、吸入式麻酔の呼吸ガスに含まれる、二酸化炭素CO2、揮発性麻酔ガスAA、酸素O2、亜酸化窒素N2O等のいずれのガスにも本発明を適用することができる。
【0041】
図5は、濃度Fが0.5のO2を含む吸入ガスを供給した場合の、O2に関するEAST法の適用を示した図である。
【0042】
CO2の(1)、(2)、(3)式を、O2に置き換えると、それぞれに対応して下記の(4)、(5)、(6)式が得られる。
VE×(FIO2−FEO2)=VO2、書き換えると
FEO2=FIO2−VO2/VE (4)
VA×(FIO2−FAO2)=VO2、書き換えると
FAO2=FIO2−VO2/VA (5)
VE×(FIO2−FEO2)=VA×(FIO2−FAO2) (6)
(式中、VEは一回呼気量を、VO2は酸素摂取量を、FEO2は混合呼気O2濃度を、VDは死腔量を、VAは肺胞換気量を、FAO2は肺胞気O2濃度を表す)。
【0043】
CO2の場合と同様に、X−Y座標上にO2濃度−換気量ループを描いて、その面積から酸素摂取量VO2を計算し、同じX−Y座標上に(FIO2−F)×V=VO2となるF−V反比例曲線を描き、次いで、(4)、(5)、(6)式を用い、上記CO2に関して実施したのと同様のEAST法の手順を実施することにより、FEO2、VD、VA、FAO2を求めて、O2濃度−換気量ループ及びF−V反比例曲線を描いたX−Y座標、並びに数値表を、毎呼吸、表示装置34に表示することができる。
【0044】
呼吸ガスに含まれる、二酸化炭素CO2、揮発性麻酔ガスAA、酸素O2、亜酸化窒素N2O等の、1呼吸毎の各成分ガスの濃度−換気量ループ及びF−V反比例曲線を、同一X−Y座標上に所定の時間又は連続する複数回呼吸にわたって描き、対応する数値表とともに表示装置34に表示すると、被験者の状態の微妙な変化を視覚的にかつ数値的に同時に認知することができ、臨床的有用性は大きい。
【0045】
本発明を、揮発性麻酔ガスAA、亜酸化窒素N2O等の麻酔ガスの吸入に適用すると、それぞれのガスの摂取量または排泄量VAA、VN2O、混合呼気濃度FEAA、FEN2O、肺胞気濃度FAAA、FAN2Oを毎呼吸モニタリングすることが可能となる。従来、麻酔深度の指標としては、呼気終末濃度FETAA、FETN2Oが用いられてきたが、より信頼性の高い指標、つまり血中濃度により近い指標を手に入れることができるようになる。
【0046】
本発明の実施形態から、以下のことが明らかとなった。
(イ)本発明は、VCO2、FECO2、VD、VA、FACO2などの無侵襲連続モニタリングを可能とするものであり、臨床的有用性は大きい。
(ロ)この技術は二酸化炭素に止まらず、酸素、揮発性麻酔ガス、亜酸化窒素等の測定可能な他の呼吸ガスへも展開できる。特に、CO2と同様な分析がO2にも応用されることの、臨床的な意義は極めて大きい。
(ハ)麻酔ガス摂取の分析に応用されると、より信頼性の高い麻酔深度の指標を得ることができる。
(ニ)これらの技術は術中の呼吸管理にとどまらず、幅広く呼吸分析一般に応用可能である。
【0047】
以上、実施形態を用いて本発明を説明したが、本発明の技術的範囲は上記実施形態に記載の範囲には限定されないことは言うまでもない。上記実施形態に、多様な変更または改良を加えることが可能であることが、当業者には明らかである。また、その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【符号の説明】
【0048】
1 循環式呼吸回路
2 ガス供給装置
3 制御装置
11 吸気弁
12 コネクタ
13 フローセンサ
14 呼吸ガスセンサ
15 呼気弁
16 CO2吸収剤キャニスタ
17 ベンチレータ
31 記憶装置
32 演算装置
33 入力装置
34 表示装置
35 インタフェース(I/F)
36 フローセンサ回路
37 呼吸ガスセンサ駆動回路
100 モニタシステム
【特許請求の範囲】
【請求項1】
呼吸回路に設けられ患者の呼吸ガスのフローを連続的に検出するフローセンサと、
前記呼吸回路に設けられ前記呼吸ガスの成分ガスの濃度を連続的に検出する呼吸ガスセンサと、
前記フローセンサ及び前記呼吸ガスセンサからの出力データを保存、演算して画像データとし、当該画像データを毎呼吸、表示装置に表示する制御装置と、
を備えたモニタシステムにおいて、
前記制御装置は、当該制御装置の表示装置にX−Y座標を設け、1呼吸毎に当該X−Y座標上に前記フローセンサによって測定した吸気、呼気連続の前記呼吸ガスのフローデータすなわち換気量Vと、前記呼吸ガスセンサによって測定した吸気、呼気連続の前記呼吸ガスの前記成分ガスの1つであるCO2ガスの濃度Fとを同期させて、前記CO2ガスの吸気、呼気連続した濃度−換気量ループを描き、当該ループが囲む面積を計算して前記CO2ガスの排泄量VCO2を求め、当該VCO2を用いてF×V=VCO2となる反比例曲線を表示し、さらに、前記CO2ガスの濃度Fと前記換気量Vの関係の変化を、前記X−Y座標に描いた前記濃度−換気量ループの原点と、前記反比例曲線上の任意の1点とを結ぶ直線を対角線とする面積VCO2の長方形の変化として前記X−Y座標に表現することを特徴とするモニタシステムの制御方法。
【請求項2】
前記制御装置は、1呼吸毎に、濃度−換気量ループと、その面積である前記VCO2を用いて、EAST(Equal Area Step Technology)法により、以下の関係式(1)、(2)を表す前記長方形を前記X−Y座標に表示して、前記CO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を求めて、前記X−Y座標に表示することを特徴とする請求項1に記載のモニタシステムの制御方法。
VE×(FECO2−FICO2)=VCO2、書き換えると
FECO2=VCO2/VE+FICO2 (1)
VA×(FACO2−FICO2)=VCO2、書き換えると
FACO2=VCO2/VA+FICO2 (2)
(式中のVEは一回呼気量を表す。通常FICO2=0である。)
【請求項3】
前記制御装置は、所定の時間連続して、1呼吸毎の前記CO2ガスの前記混合呼気濃度FECO2、前記肺胞換気量VA、前記死腔量VD、前記肺胞気濃度FACO2を、前記濃度−換気量ループ及び前記面積VCO2の長方形とともに同一の前記X−Y座標に表示し、さらに前記CO2ガスの、前記排泄量VCO2、前記混合呼気濃度FECO2、前記肺胞換気量VA、前記死腔量VD、及び前記肺胞気濃度FACO2の数値表を作成して、前記表示装置の所定の領域に表示することを特徴とする請求項2に記載のモニタシステム。
【請求項4】
呼吸回路に設けられ患者の呼吸ガスのフローを連続的に検出するフローセンサと、
前記呼吸回路に設けられ前記呼吸ガスの成分ガスの濃度を連続的に検出する呼吸ガスセンサと、
前記フローセンサ及び前記呼吸ガスセンサからの出力データを保存、演算して画像データとし、当該画像データを毎呼吸、表示装置に表示する制御装置と、
を備え、
前記制御装置の前記表示装置は、X−Y座標上に1呼吸毎に、前記フローセンサによって測定した吸気、呼気連続の前記呼吸ガスのフローデータすなわち換気量Vと、前記呼吸ガスセンサによって測定した吸気、呼気連続の前記成分ガスの1つであるCO2ガスの濃度Fとを同期させて得られる、前記CO2ガスの吸気、呼気連続した濃度−換気量ループと、当該ループが囲む面積から求めた前記CO2ガスの排泄量VCO2を基に演算される、F×V=VCO2となる反比例曲線と、を表示し、さらに、前記CO2ガスの濃度Fと前記換気量Vの関係の変化を、前記X−Y座標に描いた前記濃度−換気量ループの原点と、前記反比例曲線上の任意の1点とを結ぶ直線を対角線とする面積VCO2の長方形の変化として前記X−Y座標に表現することを特徴とするモニタシステム。
【請求項5】
前記制御装置の前記表示装置は、前記X−Y座標上に1呼吸毎に、濃度−換気量ループと、その面積である前記VCO2を用いて、EAST(Equal Area Step Technology)法により、以下の関係式(1)、(2)を表す前記面積VCO2の長方形を前記X−Y座標に描出することによって求められる前記CO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、前記長方形とともに表示することを特徴とする請求項4に記載のモニタシステム。
VE×(FECO2−FICO2)=VCO2、書き換えると
FECO2=VCO2/VE+FICO2 (1)
VA×(FACO2−FICO2)=VCO2、書き換えると
FACO2=VCO2/VA+FICO2 (2)
(式中のVEは一回呼気量を表す。通常FICO2 =0である。)
【請求項6】
前記制御装置の前記表示装置は、所定の時間連続して、1呼吸毎の前記CO2ガスの前記混合呼気濃度FECO2、前記肺胞換気量VA、前記死腔量VD、前記肺胞気濃度FACO2を、前記濃度−換気量ループ及び前記長方形とともに同一の前記X−Y座標に表示し、さらに前記CO2ガスの、前記排泄量VCO2、前記混合呼気濃度FECO2、前記肺胞換気量VA、前記死腔量VD、及び前記肺胞気濃度FACO2の数値表を所定の領域に表示することを特徴とする請求項5に記載のモニタシステム。
【請求項1】
呼吸回路に設けられ患者の呼吸ガスのフローを連続的に検出するフローセンサと、
前記呼吸回路に設けられ前記呼吸ガスの成分ガスの濃度を連続的に検出する呼吸ガスセンサと、
前記フローセンサ及び前記呼吸ガスセンサからの出力データを保存、演算して画像データとし、当該画像データを毎呼吸、表示装置に表示する制御装置と、
を備えたモニタシステムにおいて、
前記制御装置は、当該制御装置の表示装置にX−Y座標を設け、1呼吸毎に当該X−Y座標上に前記フローセンサによって測定した吸気、呼気連続の前記呼吸ガスのフローデータすなわち換気量Vと、前記呼吸ガスセンサによって測定した吸気、呼気連続の前記呼吸ガスの前記成分ガスの1つであるCO2ガスの濃度Fとを同期させて、前記CO2ガスの吸気、呼気連続した濃度−換気量ループを描き、当該ループが囲む面積を計算して前記CO2ガスの排泄量VCO2を求め、当該VCO2を用いてF×V=VCO2となる反比例曲線を表示し、さらに、前記CO2ガスの濃度Fと前記換気量Vの関係の変化を、前記X−Y座標に描いた前記濃度−換気量ループの原点と、前記反比例曲線上の任意の1点とを結ぶ直線を対角線とする面積VCO2の長方形の変化として前記X−Y座標に表現することを特徴とするモニタシステムの制御方法。
【請求項2】
前記制御装置は、1呼吸毎に、濃度−換気量ループと、その面積である前記VCO2を用いて、EAST(Equal Area Step Technology)法により、以下の関係式(1)、(2)を表す前記長方形を前記X−Y座標に表示して、前記CO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を求めて、前記X−Y座標に表示することを特徴とする請求項1に記載のモニタシステムの制御方法。
VE×(FECO2−FICO2)=VCO2、書き換えると
FECO2=VCO2/VE+FICO2 (1)
VA×(FACO2−FICO2)=VCO2、書き換えると
FACO2=VCO2/VA+FICO2 (2)
(式中のVEは一回呼気量を表す。通常FICO2=0である。)
【請求項3】
前記制御装置は、所定の時間連続して、1呼吸毎の前記CO2ガスの前記混合呼気濃度FECO2、前記肺胞換気量VA、前記死腔量VD、前記肺胞気濃度FACO2を、前記濃度−換気量ループ及び前記面積VCO2の長方形とともに同一の前記X−Y座標に表示し、さらに前記CO2ガスの、前記排泄量VCO2、前記混合呼気濃度FECO2、前記肺胞換気量VA、前記死腔量VD、及び前記肺胞気濃度FACO2の数値表を作成して、前記表示装置の所定の領域に表示することを特徴とする請求項2に記載のモニタシステム。
【請求項4】
呼吸回路に設けられ患者の呼吸ガスのフローを連続的に検出するフローセンサと、
前記呼吸回路に設けられ前記呼吸ガスの成分ガスの濃度を連続的に検出する呼吸ガスセンサと、
前記フローセンサ及び前記呼吸ガスセンサからの出力データを保存、演算して画像データとし、当該画像データを毎呼吸、表示装置に表示する制御装置と、
を備え、
前記制御装置の前記表示装置は、X−Y座標上に1呼吸毎に、前記フローセンサによって測定した吸気、呼気連続の前記呼吸ガスのフローデータすなわち換気量Vと、前記呼吸ガスセンサによって測定した吸気、呼気連続の前記成分ガスの1つであるCO2ガスの濃度Fとを同期させて得られる、前記CO2ガスの吸気、呼気連続した濃度−換気量ループと、当該ループが囲む面積から求めた前記CO2ガスの排泄量VCO2を基に演算される、F×V=VCO2となる反比例曲線と、を表示し、さらに、前記CO2ガスの濃度Fと前記換気量Vの関係の変化を、前記X−Y座標に描いた前記濃度−換気量ループの原点と、前記反比例曲線上の任意の1点とを結ぶ直線を対角線とする面積VCO2の長方形の変化として前記X−Y座標に表現することを特徴とするモニタシステム。
【請求項5】
前記制御装置の前記表示装置は、前記X−Y座標上に1呼吸毎に、濃度−換気量ループと、その面積である前記VCO2を用いて、EAST(Equal Area Step Technology)法により、以下の関係式(1)、(2)を表す前記面積VCO2の長方形を前記X−Y座標に描出することによって求められる前記CO2ガスの混合呼気濃度FECO2、肺胞換気量VA、死腔量VD、肺胞気濃度FACO2を、前記長方形とともに表示することを特徴とする請求項4に記載のモニタシステム。
VE×(FECO2−FICO2)=VCO2、書き換えると
FECO2=VCO2/VE+FICO2 (1)
VA×(FACO2−FICO2)=VCO2、書き換えると
FACO2=VCO2/VA+FICO2 (2)
(式中のVEは一回呼気量を表す。通常FICO2 =0である。)
【請求項6】
前記制御装置の前記表示装置は、所定の時間連続して、1呼吸毎の前記CO2ガスの前記混合呼気濃度FECO2、前記肺胞換気量VA、前記死腔量VD、前記肺胞気濃度FACO2を、前記濃度−換気量ループ及び前記長方形とともに同一の前記X−Y座標に表示し、さらに前記CO2ガスの、前記排泄量VCO2、前記混合呼気濃度FECO2、前記肺胞換気量VA、前記死腔量VD、及び前記肺胞気濃度FACO2の数値表を所定の領域に表示することを特徴とする請求項5に記載のモニタシステム。
【図1】


【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−235943(P2012−235943A)
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願番号】特願2011−107687(P2011−107687)
【出願日】平成23年5月12日(2011.5.12)
【出願人】(000200677)泉工医科工業株式会社 (56)
【Fターム(参考)】
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願日】平成23年5月12日(2011.5.12)
【出願人】(000200677)泉工医科工業株式会社 (56)
【Fターム(参考)】
[ Back to top ]