
モバイルロケータ
【課題】本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、車両の位置を計測するモバイルロケータに関する。
【背景技術】
【0002】
モバイルロケータは、車両に搭載され、車両の位置を計測する。モバイルロケータは、GPS衛星からの受信感度が良好であるときには、GPS測位機能を利用し、GPS衛星からの受信感度が良好でないときには、自律航法機能を利用する。
【0003】
ここで、自律航法機能は、温度、湿度及び振動などの環境パラメータの変化に起因して、車両位置の計測結果に誤差を発生させる。そこで、自律航法機能は、温度、湿度及び振動などの環境パラメータに対応する、車両位置の計測結果についての補正データを記憶している。例えば、特許文献1では、ジャイロ信号に、まず温度をパラメータとしてオフセット補正を加え、次に温度をパラメータとしてゲイン値を掛ける。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平07−049233号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、車両位置の計測結果についての補正データは、モバイルロケータが経時変化する前には、ある環境パラメータにおいて有効に機能していても、モバイルロケータが経時変化した後には、その環境パラメータにおいて有効に機能しなくなる。しかし、モバイルロケータが経時変化した後には、補正データは従来では修正されていなかった。
【0006】
さらに、自律航法及びGPS測位のいずれも、車両位置の計測結果に誤差を発生させるが、自律航法及びGPS測位のいずれが、車両位置の計測結果に誤差をより大きく発生させるか、必ずしも明らかではないことが従来ではあった。
【0007】
そこで、前記課題を解決するために、本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正することとした。
【0009】
具体的には、本発明は、車両に搭載され、前記車両の位置を計測するモバイルロケータであって、自律航法を実行し、前記車両の移動距離を算出する自律航法部と、前記自律航法部が算出した前記車両の移動距離についての、前記モバイルロケータの環境パラメータに対応する補正データを記憶している補正データ記憶部と、前記モバイルロケータの環境パラメータを取得する環境パラメータ取得部と、前記車両が異なる2地点を通過するときに、前記異なる2地点に設置され前記異なる2地点の位置情報を前記車両に通知する各位置情報通知装置から、前記異なる2地点の位置情報を取得する位置情報取得部と、前記環境パラメータ取得部が取得した前記モバイルロケータの環境パラメータに対応する補正データに基づいて、前記自律航法部が算出した前記異なる2地点間の前記車両の移動距離を補正する移動距離補正部と、前記移動距離補正部が補正した前記異なる2地点間の前記車両の第1の移動距離と、前記位置情報取得部が取得した前記異なる2地点の位置情報に基づく前記異なる2地点間の前記車両の第2の移動距離と、を比較する移動距離比較部と、前記第1の移動距離が前記第2の移動距離と所定の誤差の範囲で一致しないときに、前記第1の移動距離が前記第2の移動距離と前記所定の誤差の範囲で一致するように、前記補正データ記憶部が記憶している補正データを修正する一方で、前記第1の移動距離が前記第2の移動距離と前記所定の誤差の範囲で一致するときに、前記補正データ記憶部が記憶している補正データを維持する補正データ修正部と、を備えることを特徴とするモバイルロケータである。
【0010】
この構成によれば、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正することができる。
【0011】
また、本発明は、GPS測位を実行し、前記車両の位置を算出するGPS部と、前記GPS部の受信感度に基づいて、前記自律航法部に自律航法を実行させるか、前記GPS部にGPS測位を実行させるか、を選択する測位方法選択部と、前記測位方法選択部が前記GPS部にGPS測位を実行させるときに、前記位置情報取得部が取得した前記異なる2地点の位置情報の少なくともいずれかに基づいて、前記GPS部が算出した前記車両の位置を補正する位置補正部と、をさらに備えることを特徴とするモバイルロケータである。
【0012】
この構成によれば、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることができる。
【発明の効果】
【0013】
本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることができる。
【図面の簡単な説明】
【0014】
【図1】モバイルロケータの構成を示す図である。
【図2】路側器システムの構成を示す図である。
【図3】GPS測位−自律航法切替処理を示す図である。
【図4】自律航法処理を示す図である。
【図5】自律航法処理を示す図である。
【発明を実施するための形態】
【0015】
添付の図面を参照して本発明の実施形態を説明する。以下に説明する実施形態は本発明の実施の例であり、本発明は以下の実施形態に制限されるものではない。
【0016】
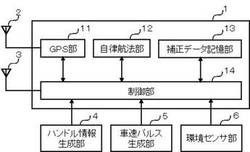
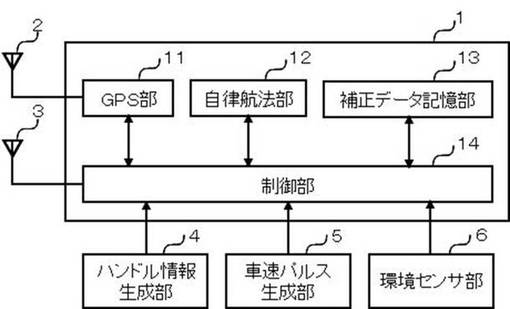
モバイルロケータの構成を図1に示す。モバイルロケータ1は、GPS部11、自律航法部12、補正データ記憶部13、制御部14から構成される。GPSアンテナ2は、GPS部11に接続され、路側器アンテナ3、ハンドル情報生成部4、車速パルス生成部5及び環境センサ部6は、制御部14に接続される。
【0017】
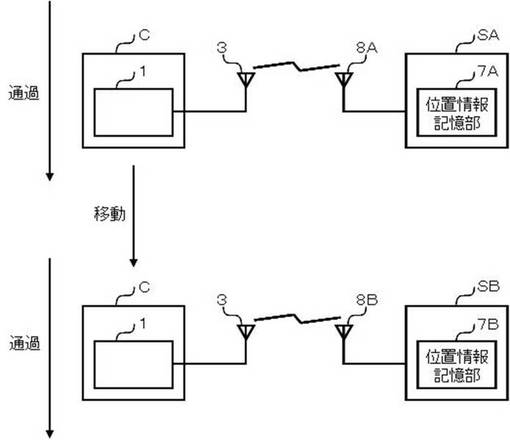
路側器システムの構成を図2に示す。路側器システムは、路側器SA、SBから構成される。路側器SA、SBは、トンネルの出入口及びの直線道路の交差点などに設置される。路側器SAは、位置情報記憶部7A及びアンテナ8Aから構成され、路側器SBは、位置情報記憶部7B及びアンテナ8Bから構成される。
【0018】
モバイルロケータ1は、車両Cに搭載され、車両Cの位置を計測する。GPS部11は、GPSアンテナ2を利用して、GPS測位を実行し、車両Cの位置を算出する。自律航法部12は、自律航法を実行し、車両Cの移動距離を算出する。自律航法部12は、ジャイロスコープ及び加速度センサなどから構成される。制御部14は、測位方法選択部として、GPS部11の受信感度に基づいて、自律航法部12に自律航法を実行させるか、GPS部11にGPS測位を実行させるか、を選択する。
【0019】
まず、自律航法について説明する。補正データ記憶部13は、自律航法部12が算出した車両Cの移動距離についての、モバイルロケータ1の環境パラメータに対応する補正データを記憶している。環境パラメータは、温度、湿度及び振動などである。
【0020】
制御部14は、環境パラメータ取得部として、環境センサ部6を利用して、モバイルロケータ1の環境パラメータを取得する。制御部14は、位置情報取得部として、路側器アンテナ3を利用して、位置情報記憶部7A、7B及びアンテナ8A、8Bを介して、車両Cが異なる2地点を通過するときに、異なる2地点の位置情報を取得する。ここで、異なる2地点に設置され異なる2地点の位置情報を車両Cに通知する位置情報通知装置として、この実施形態では路側器SA、SBを利用しているが、他の実施形態では信号機、電信柱、街灯や道路標識などを利用してもよい。
【0021】
制御部14は、移動距離補正部として、上記で取得したモバイルロケータ1の環境パラメータに対応する補正データに基づいて、自律航法部12が算出した異なる2地点間の車両Cの移動距離を補正する。制御部14は、移動距離比較部として、上記で補正した異なる2地点間の車両Cの第1の移動距離と、上記で取得した異なる2地点の位置情報に基づく異なる2地点間の車両Cの第2の移動距離と、を比較する。
【0022】
第1の移動距離が第2の移動距離と所定の誤差の範囲で一致しないときに、制御部14は、補正データ修正部として、第1の移動距離が第2の移動距離と所定の誤差の範囲で一致するように、補正データ記憶部13が記憶している補正データを修正する。第1の移動距離が第2の移動距離と所定の誤差の範囲で一致するときに、制御部14は、補正データ修正部として、補正データ記憶部13が記憶している補正データを維持する。
【0023】
次に、GPS測位について説明する。制御部14は、位置補正部として、GPS部11にGPS測位を実行させるときに、上記で取得した異なる2地点の位置情報の少なくともいずれかに基づいて、GPS部11が算出した車両Cの位置を補正する。
【0024】
自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。よって、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正することができる。GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。よって、GPS測位において、車両位置の計測結果の誤差を小さくすることができる。
【0025】
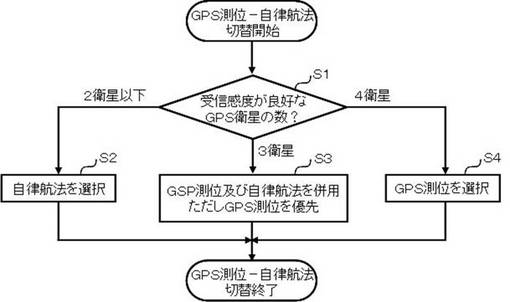
GPS測位−自律航法切替処理を図3に示す。制御部14は、受信感度が良好なGPS衛星の数を調べる(ステップS1)。受信感度が良好なGPS衛星の数が、2衛星以下であるときには、制御部14は、自律航法を選択する(ステップS2)。受信感度が良好なGPS衛星の数が、3衛星であるときには、制御部14は、GPS測位及び自律航法を併用するが、GPS測位を優先する(ステップS3)。受信感度が良好なGPS衛星の数が、4衛星であるときには、制御部14は、GPS測位を選択する(ステップS4)。GPS測位処理は、図1及び図2を利用して説明したとおりである。
【0026】
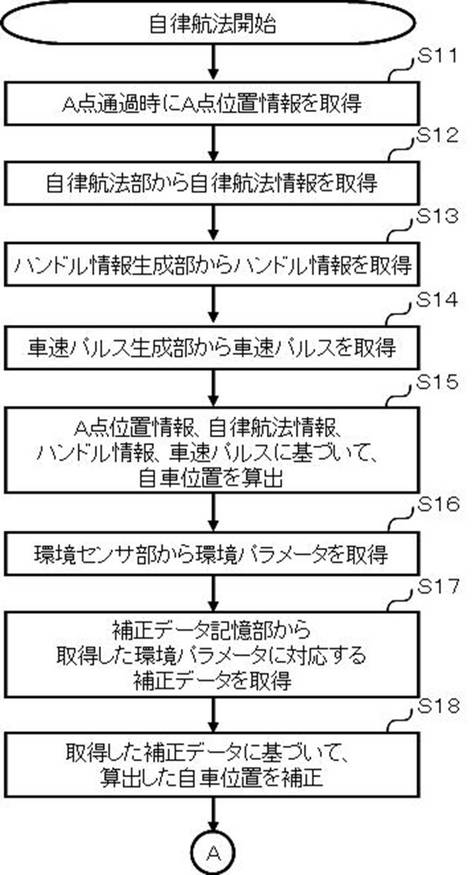
自律航法処理を図4及び図5に示す。車両Cが、A点からB点まで移動する間に、モバイルロケータ1は、A点からB点までの移動距離を算出し補正する。
【0027】
車両Cが、A点に設置されている路側器SAを通過するときに、制御部14は、路側器SAからA点の位置情報を取得する(ステップS11)。
【0028】
制御部14は、自律航法部12から自律航法情報を取得する(ステップS12)。上記したように、自律航法部12は、ジャイロスコープ及び加速度センサなどから構成される。制御部14は、ハンドル情報生成部4からハンドル情報を取得する(ステップS13)。ここで、ハンドル情報は、ジャイロスコープなどの方向計測装置を補助する情報である。制御部14は、車速パルス生成部5から車速パルスを取得する(ステップS14)。ここで、車速パルスは、加速度センサなどの速度計測装置を補助する情報である。
【0029】
制御部14は、A点の位置情報、自律航法情報、ハンドル情報及び車速パルスに基づいて、車両Cの位置を算出する(ステップS15)。具体的には、制御部14は、ジャイロスコープ情報及びハンドル情報を利用して、A点からの移動方向を算出し、加速度センサ情報及び車速パルスを利用して、A点からの移動距離を算出し、A点からの移動方向及び移動距離並びにA点の位置情報に基づいて、車両Cの位置を算出する。
【0030】
制御部14は、環境センサ部6から環境パラメータを取得する(ステップS16)。上記したように、環境パラメータは、温度、湿度及び振動などである。制御部14は、補正データ記憶部13から、ステップS16で取得した環境パラメータに対応する、補正データを取得する(ステップS17)。制御部14は、ステップS17で取得した補正データに基づいて、ステップS15で算出した車両Cの位置を補正する(ステップS18)。
【0031】
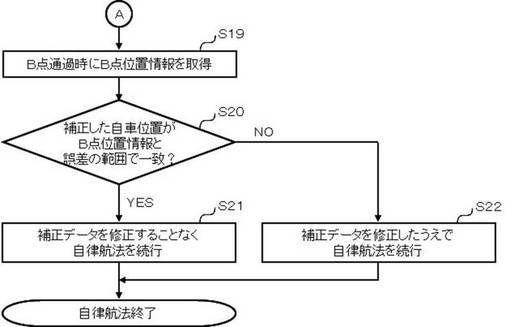
車両Cが、B点に設置されている路側器SBを通過するときに、制御部14は、路側器SBからB点の位置情報を取得する(ステップS19)。
【0032】
制御部14は、ステップS18で補正した車両Cの位置が、ステップS19で取得したB点の位置情報と、所定の誤差の範囲で一致するかどうかを調べる(ステップS20)。
【0033】
補正した車両Cの位置が、取得したB点の位置情報と、所定の誤差の範囲で一致するときには(ステップS20においてYES)、制御部14は、補正データを修正することなく、維持した補正データを利用して、自律航法を続行する(ステップS21)。そして、モバイルロケータ1は、A点を起点として移動距離の算出を続行する。
【0034】
補正した車両Cの位置が、取得したB点の位置情報と、所定の誤差の範囲で一致しないときには(ステップS20においてNO)、制御部14は、補正データを修正したうえで、修正した補正データを利用して、自律航法を続行する(ステップS22)。そして、モバイルロケータ1は、B点を起点として移動距離の算出を続行する。
【0035】
図4及び図5に示した実施形態では、モバイルロケータ1が自律航法を選択しているときに、車両CがA点に差し掛かっているため、モバイルロケータ1はA点を起点として移動距離を算出している。しかし、変形例として、モバイルロケータ1がGPS測位から自律航法に切り換えたときに、車両CがA点に差し掛かっていなければ、モバイルロケータ1はGPS測位の最新結果を起点として移動距離を算出してもよい。
【0036】
図4及び図5に示した実施形態では、モバイルロケータ1が自律航法を選択しているときに、補正データが既に記憶されている。しかし、変形例として、モバイルロケータ1が自律航法を選択しているときに、補正データが未だ記憶されていない場合がある。この場合には、A点からB点までで補正せず算出した信頼度の低い移動距離と、A点及びB点の位置情報に基づく信頼度の高い移動距離と、の差分データを補正データとすればよい。あるいは、自律航法部12のデフォルトの補正データを利用してもよい。
【0037】
ステップS20において、補正した車両Cの位置が取得したB点の位置情報と大幅に相違するときには、自律航法部12は規格外になっている。この場合には、モバイルロケータ1は、基地局にその旨を通知し、基地局を利用して車両Cの位置を計測してもよい。
【産業上の利用可能性】
【0038】
本発明に係るモバイルロケータは、異なる2地点の絶対位置情報を通知する路側器などの手段を利用することができれば、様々な車両に対して適用することができる。
【符号の説明】
【0039】
C:車両
SA、SB:路側器
1:モバイルロケータ
2:GPSアンテナ
3:路側器アンテナ
4:ハンドル情報生成部
5:車速パルス生成部
6:環境センサ部
7A、7B:位置情報記憶部
8A、8B:アンテナ
11:GPS部
12:自律航法部
13:補正データ記憶部
14:制御部
【技術分野】
【0001】
本発明は、車両に搭載され、車両の位置を計測するモバイルロケータに関する。
【背景技術】
【0002】
モバイルロケータは、車両に搭載され、車両の位置を計測する。モバイルロケータは、GPS衛星からの受信感度が良好であるときには、GPS測位機能を利用し、GPS衛星からの受信感度が良好でないときには、自律航法機能を利用する。
【0003】
ここで、自律航法機能は、温度、湿度及び振動などの環境パラメータの変化に起因して、車両位置の計測結果に誤差を発生させる。そこで、自律航法機能は、温度、湿度及び振動などの環境パラメータに対応する、車両位置の計測結果についての補正データを記憶している。例えば、特許文献1では、ジャイロ信号に、まず温度をパラメータとしてオフセット補正を加え、次に温度をパラメータとしてゲイン値を掛ける。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平07−049233号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、車両位置の計測結果についての補正データは、モバイルロケータが経時変化する前には、ある環境パラメータにおいて有効に機能していても、モバイルロケータが経時変化した後には、その環境パラメータにおいて有効に機能しなくなる。しかし、モバイルロケータが経時変化した後には、補正データは従来では修正されていなかった。
【0006】
さらに、自律航法及びGPS測位のいずれも、車両位置の計測結果に誤差を発生させるが、自律航法及びGPS測位のいずれが、車両位置の計測結果に誤差をより大きく発生させるか、必ずしも明らかではないことが従来ではあった。
【0007】
そこで、前記課題を解決するために、本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正することとした。
【0009】
具体的には、本発明は、車両に搭載され、前記車両の位置を計測するモバイルロケータであって、自律航法を実行し、前記車両の移動距離を算出する自律航法部と、前記自律航法部が算出した前記車両の移動距離についての、前記モバイルロケータの環境パラメータに対応する補正データを記憶している補正データ記憶部と、前記モバイルロケータの環境パラメータを取得する環境パラメータ取得部と、前記車両が異なる2地点を通過するときに、前記異なる2地点に設置され前記異なる2地点の位置情報を前記車両に通知する各位置情報通知装置から、前記異なる2地点の位置情報を取得する位置情報取得部と、前記環境パラメータ取得部が取得した前記モバイルロケータの環境パラメータに対応する補正データに基づいて、前記自律航法部が算出した前記異なる2地点間の前記車両の移動距離を補正する移動距離補正部と、前記移動距離補正部が補正した前記異なる2地点間の前記車両の第1の移動距離と、前記位置情報取得部が取得した前記異なる2地点の位置情報に基づく前記異なる2地点間の前記車両の第2の移動距離と、を比較する移動距離比較部と、前記第1の移動距離が前記第2の移動距離と所定の誤差の範囲で一致しないときに、前記第1の移動距離が前記第2の移動距離と前記所定の誤差の範囲で一致するように、前記補正データ記憶部が記憶している補正データを修正する一方で、前記第1の移動距離が前記第2の移動距離と前記所定の誤差の範囲で一致するときに、前記補正データ記憶部が記憶している補正データを維持する補正データ修正部と、を備えることを特徴とするモバイルロケータである。
【0010】
この構成によれば、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正することができる。
【0011】
また、本発明は、GPS測位を実行し、前記車両の位置を算出するGPS部と、前記GPS部の受信感度に基づいて、前記自律航法部に自律航法を実行させるか、前記GPS部にGPS測位を実行させるか、を選択する測位方法選択部と、前記測位方法選択部が前記GPS部にGPS測位を実行させるときに、前記位置情報取得部が取得した前記異なる2地点の位置情報の少なくともいずれかに基づいて、前記GPS部が算出した前記車両の位置を補正する位置補正部と、をさらに備えることを特徴とするモバイルロケータである。
【0012】
この構成によれば、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることができる。
【発明の効果】
【0013】
本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることができる。
【図面の簡単な説明】
【0014】
【図1】モバイルロケータの構成を示す図である。
【図2】路側器システムの構成を示す図である。
【図3】GPS測位−自律航法切替処理を示す図である。
【図4】自律航法処理を示す図である。
【図5】自律航法処理を示す図である。
【発明を実施するための形態】
【0015】
添付の図面を参照して本発明の実施形態を説明する。以下に説明する実施形態は本発明の実施の例であり、本発明は以下の実施形態に制限されるものではない。
【0016】
モバイルロケータの構成を図1に示す。モバイルロケータ1は、GPS部11、自律航法部12、補正データ記憶部13、制御部14から構成される。GPSアンテナ2は、GPS部11に接続され、路側器アンテナ3、ハンドル情報生成部4、車速パルス生成部5及び環境センサ部6は、制御部14に接続される。
【0017】
路側器システムの構成を図2に示す。路側器システムは、路側器SA、SBから構成される。路側器SA、SBは、トンネルの出入口及びの直線道路の交差点などに設置される。路側器SAは、位置情報記憶部7A及びアンテナ8Aから構成され、路側器SBは、位置情報記憶部7B及びアンテナ8Bから構成される。
【0018】
モバイルロケータ1は、車両Cに搭載され、車両Cの位置を計測する。GPS部11は、GPSアンテナ2を利用して、GPS測位を実行し、車両Cの位置を算出する。自律航法部12は、自律航法を実行し、車両Cの移動距離を算出する。自律航法部12は、ジャイロスコープ及び加速度センサなどから構成される。制御部14は、測位方法選択部として、GPS部11の受信感度に基づいて、自律航法部12に自律航法を実行させるか、GPS部11にGPS測位を実行させるか、を選択する。
【0019】
まず、自律航法について説明する。補正データ記憶部13は、自律航法部12が算出した車両Cの移動距離についての、モバイルロケータ1の環境パラメータに対応する補正データを記憶している。環境パラメータは、温度、湿度及び振動などである。
【0020】
制御部14は、環境パラメータ取得部として、環境センサ部6を利用して、モバイルロケータ1の環境パラメータを取得する。制御部14は、位置情報取得部として、路側器アンテナ3を利用して、位置情報記憶部7A、7B及びアンテナ8A、8Bを介して、車両Cが異なる2地点を通過するときに、異なる2地点の位置情報を取得する。ここで、異なる2地点に設置され異なる2地点の位置情報を車両Cに通知する位置情報通知装置として、この実施形態では路側器SA、SBを利用しているが、他の実施形態では信号機、電信柱、街灯や道路標識などを利用してもよい。
【0021】
制御部14は、移動距離補正部として、上記で取得したモバイルロケータ1の環境パラメータに対応する補正データに基づいて、自律航法部12が算出した異なる2地点間の車両Cの移動距離を補正する。制御部14は、移動距離比較部として、上記で補正した異なる2地点間の車両Cの第1の移動距離と、上記で取得した異なる2地点の位置情報に基づく異なる2地点間の車両Cの第2の移動距離と、を比較する。
【0022】
第1の移動距離が第2の移動距離と所定の誤差の範囲で一致しないときに、制御部14は、補正データ修正部として、第1の移動距離が第2の移動距離と所定の誤差の範囲で一致するように、補正データ記憶部13が記憶している補正データを修正する。第1の移動距離が第2の移動距離と所定の誤差の範囲で一致するときに、制御部14は、補正データ修正部として、補正データ記憶部13が記憶している補正データを維持する。
【0023】
次に、GPS測位について説明する。制御部14は、位置補正部として、GPS部11にGPS測位を実行させるときに、上記で取得した異なる2地点の位置情報の少なくともいずれかに基づいて、GPS部11が算出した車両Cの位置を補正する。
【0024】
自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。よって、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正することができる。GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。よって、GPS測位において、車両位置の計測結果の誤差を小さくすることができる。
【0025】
GPS測位−自律航法切替処理を図3に示す。制御部14は、受信感度が良好なGPS衛星の数を調べる(ステップS1)。受信感度が良好なGPS衛星の数が、2衛星以下であるときには、制御部14は、自律航法を選択する(ステップS2)。受信感度が良好なGPS衛星の数が、3衛星であるときには、制御部14は、GPS測位及び自律航法を併用するが、GPS測位を優先する(ステップS3)。受信感度が良好なGPS衛星の数が、4衛星であるときには、制御部14は、GPS測位を選択する(ステップS4)。GPS測位処理は、図1及び図2を利用して説明したとおりである。
【0026】
自律航法処理を図4及び図5に示す。車両Cが、A点からB点まで移動する間に、モバイルロケータ1は、A点からB点までの移動距離を算出し補正する。
【0027】
車両Cが、A点に設置されている路側器SAを通過するときに、制御部14は、路側器SAからA点の位置情報を取得する(ステップS11)。
【0028】
制御部14は、自律航法部12から自律航法情報を取得する(ステップS12)。上記したように、自律航法部12は、ジャイロスコープ及び加速度センサなどから構成される。制御部14は、ハンドル情報生成部4からハンドル情報を取得する(ステップS13)。ここで、ハンドル情報は、ジャイロスコープなどの方向計測装置を補助する情報である。制御部14は、車速パルス生成部5から車速パルスを取得する(ステップS14)。ここで、車速パルスは、加速度センサなどの速度計測装置を補助する情報である。
【0029】
制御部14は、A点の位置情報、自律航法情報、ハンドル情報及び車速パルスに基づいて、車両Cの位置を算出する(ステップS15)。具体的には、制御部14は、ジャイロスコープ情報及びハンドル情報を利用して、A点からの移動方向を算出し、加速度センサ情報及び車速パルスを利用して、A点からの移動距離を算出し、A点からの移動方向及び移動距離並びにA点の位置情報に基づいて、車両Cの位置を算出する。
【0030】
制御部14は、環境センサ部6から環境パラメータを取得する(ステップS16)。上記したように、環境パラメータは、温度、湿度及び振動などである。制御部14は、補正データ記憶部13から、ステップS16で取得した環境パラメータに対応する、補正データを取得する(ステップS17)。制御部14は、ステップS17で取得した補正データに基づいて、ステップS15で算出した車両Cの位置を補正する(ステップS18)。
【0031】
車両Cが、B点に設置されている路側器SBを通過するときに、制御部14は、路側器SBからB点の位置情報を取得する(ステップS19)。
【0032】
制御部14は、ステップS18で補正した車両Cの位置が、ステップS19で取得したB点の位置情報と、所定の誤差の範囲で一致するかどうかを調べる(ステップS20)。
【0033】
補正した車両Cの位置が、取得したB点の位置情報と、所定の誤差の範囲で一致するときには(ステップS20においてYES)、制御部14は、補正データを修正することなく、維持した補正データを利用して、自律航法を続行する(ステップS21)。そして、モバイルロケータ1は、A点を起点として移動距離の算出を続行する。
【0034】
補正した車両Cの位置が、取得したB点の位置情報と、所定の誤差の範囲で一致しないときには(ステップS20においてNO)、制御部14は、補正データを修正したうえで、修正した補正データを利用して、自律航法を続行する(ステップS22)。そして、モバイルロケータ1は、B点を起点として移動距離の算出を続行する。
【0035】
図4及び図5に示した実施形態では、モバイルロケータ1が自律航法を選択しているときに、車両CがA点に差し掛かっているため、モバイルロケータ1はA点を起点として移動距離を算出している。しかし、変形例として、モバイルロケータ1がGPS測位から自律航法に切り換えたときに、車両CがA点に差し掛かっていなければ、モバイルロケータ1はGPS測位の最新結果を起点として移動距離を算出してもよい。
【0036】
図4及び図5に示した実施形態では、モバイルロケータ1が自律航法を選択しているときに、補正データが既に記憶されている。しかし、変形例として、モバイルロケータ1が自律航法を選択しているときに、補正データが未だ記憶されていない場合がある。この場合には、A点からB点までで補正せず算出した信頼度の低い移動距離と、A点及びB点の位置情報に基づく信頼度の高い移動距離と、の差分データを補正データとすればよい。あるいは、自律航法部12のデフォルトの補正データを利用してもよい。
【0037】
ステップS20において、補正した車両Cの位置が取得したB点の位置情報と大幅に相違するときには、自律航法部12は規格外になっている。この場合には、モバイルロケータ1は、基地局にその旨を通知し、基地局を利用して車両Cの位置を計測してもよい。
【産業上の利用可能性】
【0038】
本発明に係るモバイルロケータは、異なる2地点の絶対位置情報を通知する路側器などの手段を利用することができれば、様々な車両に対して適用することができる。
【符号の説明】
【0039】
C:車両
SA、SB:路側器
1:モバイルロケータ
2:GPSアンテナ
3:路側器アンテナ
4:ハンドル情報生成部
5:車速パルス生成部
6:環境センサ部
7A、7B:位置情報記憶部
8A、8B:アンテナ
11:GPS部
12:自律航法部
13:補正データ記憶部
14:制御部
【特許請求の範囲】
【請求項1】
車両に搭載され、前記車両の位置を計測するモバイルロケータであって、
自律航法を実行し、前記車両の移動距離を算出する自律航法部と、
前記自律航法部が算出した前記車両の移動距離についての、前記モバイルロケータの環境パラメータに対応する補正データを記憶している補正データ記憶部と、
前記モバイルロケータの環境パラメータを取得する環境パラメータ取得部と、
前記車両が異なる2地点を通過するときに、前記異なる2地点に設置され前記異なる2地点の位置情報を前記車両に通知する各位置情報通知装置から、前記異なる2地点の位置情報を取得する位置情報取得部と、
前記環境パラメータ取得部が取得した前記モバイルロケータの環境パラメータに対応する補正データに基づいて、前記自律航法部が算出した前記異なる2地点間の前記車両の移動距離を補正する移動距離補正部と、
前記移動距離補正部が補正した前記異なる2地点間の前記車両の第1の移動距離と、前記位置情報取得部が取得した前記異なる2地点の位置情報に基づく前記異なる2地点間の前記車両の第2の移動距離と、を比較する移動距離比較部と、
前記第1の移動距離が前記第2の移動距離と所定の誤差の範囲で一致しないときに、前記第1の移動距離が前記第2の移動距離と前記所定の誤差の範囲で一致するように、前記補正データ記憶部が記憶している補正データを修正する一方で、前記第1の移動距離が前記第2の移動距離と前記所定の誤差の範囲で一致するときに、前記補正データ記憶部が記憶している補正データを維持する補正データ修正部と、
を備えることを特徴とするモバイルロケータ。
【請求項2】
GPS測位を実行し、前記車両の位置を算出するGPS部と、
前記GPS部の受信感度に基づいて、前記自律航法部に自律航法を実行させるか、前記GPS部にGPS測位を実行させるか、を選択する測位方法選択部と、
前記測位方法選択部が前記GPS部にGPS測位を実行させるときに、前記位置情報取得部が取得した前記異なる2地点の位置情報の少なくともいずれかに基づいて、前記GPS部が算出した前記車両の位置を補正する位置補正部と、
をさらに備えることを特徴とする、請求項1に記載のモバイルロケータ。
【請求項1】
車両に搭載され、前記車両の位置を計測するモバイルロケータであって、
自律航法を実行し、前記車両の移動距離を算出する自律航法部と、
前記自律航法部が算出した前記車両の移動距離についての、前記モバイルロケータの環境パラメータに対応する補正データを記憶している補正データ記憶部と、
前記モバイルロケータの環境パラメータを取得する環境パラメータ取得部と、
前記車両が異なる2地点を通過するときに、前記異なる2地点に設置され前記異なる2地点の位置情報を前記車両に通知する各位置情報通知装置から、前記異なる2地点の位置情報を取得する位置情報取得部と、
前記環境パラメータ取得部が取得した前記モバイルロケータの環境パラメータに対応する補正データに基づいて、前記自律航法部が算出した前記異なる2地点間の前記車両の移動距離を補正する移動距離補正部と、
前記移動距離補正部が補正した前記異なる2地点間の前記車両の第1の移動距離と、前記位置情報取得部が取得した前記異なる2地点の位置情報に基づく前記異なる2地点間の前記車両の第2の移動距離と、を比較する移動距離比較部と、
前記第1の移動距離が前記第2の移動距離と所定の誤差の範囲で一致しないときに、前記第1の移動距離が前記第2の移動距離と前記所定の誤差の範囲で一致するように、前記補正データ記憶部が記憶している補正データを修正する一方で、前記第1の移動距離が前記第2の移動距離と前記所定の誤差の範囲で一致するときに、前記補正データ記憶部が記憶している補正データを維持する補正データ修正部と、
を備えることを特徴とするモバイルロケータ。
【請求項2】
GPS測位を実行し、前記車両の位置を算出するGPS部と、
前記GPS部の受信感度に基づいて、前記自律航法部に自律航法を実行させるか、前記GPS部にGPS測位を実行させるか、を選択する測位方法選択部と、
前記測位方法選択部が前記GPS部にGPS測位を実行させるときに、前記位置情報取得部が取得した前記異なる2地点の位置情報の少なくともいずれかに基づいて、前記GPS部が算出した前記車両の位置を補正する位置補正部と、
をさらに備えることを特徴とする、請求項1に記載のモバイルロケータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−230018(P2012−230018A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2011−98843(P2011−98843)
【出願日】平成23年4月27日(2011.4.27)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成23年4月27日(2011.4.27)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]