
モバイル機器
【課題】振動機能を有する携帯電話機などのモバイル機器において、ユーザが体感する振動を大きなものとする。
【解決手段】振動モータ2,3は、互いのシャフトが略平行になるように、筐体1に実装されている。制御部8は、分銅2aが回転することにより発生する第1の遠心力の方向が、振動モータ2,3のシャフトを含む平面に対して垂直方向となるとき、分銅3aが回転することにより発生する第2の遠心力の方向が上記平面に対して略反対方向になるように振動モータ2,3を制御する。更に、制御部8は、上記第1の遠心力の方向が上記平面と平行になるとき、上記第2の遠心力の方向が上記第1の遠心力の方向と同一方向となるように振動モータ2,3を駆動する。
【解決手段】振動モータ2,3は、互いのシャフトが略平行になるように、筐体1に実装されている。制御部8は、分銅2aが回転することにより発生する第1の遠心力の方向が、振動モータ2,3のシャフトを含む平面に対して垂直方向となるとき、分銅3aが回転することにより発生する第2の遠心力の方向が上記平面に対して略反対方向になるように振動モータ2,3を制御する。更に、制御部8は、上記第1の遠心力の方向が上記平面と平行になるとき、上記第2の遠心力の方向が上記第1の遠心力の方向と同一方向となるように振動モータ2,3を駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、振動モータにより着信等を知らせる機能を持つ携帯電話等のモバイル機器に関する。
【背景技術】
【0002】
従来、モバイル機器の着信等を知らせるための振動モータにおいては、ユーザに振動を確実に伝える必要があり、そのため出来るだけ振動量を大きくする必要があり、結果として出来るだけ大きな振動モータを実装する必要があった。逆にモバイル機器を出来るだけ薄く(小さく)するためには振動モータは小さい物を使用する必要があり、結果として振動量が小さくなり、モバイル機器の使用者が振動モータの振動を認識し難くなるといった問題があった。
【0003】
このような問題を解決するために、例えば、複数の振動モータをモバイル機器に実装することが考えられ、この種の技術としては次のような技術が知られている(例えば、特許文献1参照)。複数の振動モータを使用することにより、単純に1個の振動モータを実装するよりも小型のモータを使用することが可能となるので、モバイル機器筐体の狭いスペースにも実装することが可能になる。
【0004】
特許文献1に記載されている技術は、モバイル機器の筐体内に2つの振動モータを互いのシャフトが平行になるように配置し、2つの振動モータを同期させて互いに逆位相で回転させている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−248426号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されている技術によれば、一方の振動モータで発生する遠心力が下向きの時は他方の振動モータで発生する遠心力も下向きとなり、一方の振動モータで発生する遠心力が上向きの時は他方の振動モータで発生する遠心力も上向きとなるので、上下方向の振動量は振動モータを1個だけ使用した場合に比較して大きくなる。しかし、単に上下方向の振動量が大きくなるだけであるので、ユーザの感じる振動を十分なものにすることができないという課題がある。
【0007】
[発明の目的]
そこで、本発明の目的は、単に上下方向の振動量が大きくなるだけであるので、ユーザの感じる振動を十分なものにすることができないという課題を解決したモバイル機器を提供することにある。
【課題を解決するための手段】
【0008】
本発明にかかるモバイル機器は、
筐体と、
第1のシャフトに第1の分銅が固定され、前記筐体に実装された第1の振動モータと、
第2のシャフトに第2の分銅が固定され、前記第2のシャフトが前記第1のシャフトと略平行になるように前記筐体に実装された第2の振動モータと、
前記第1の分銅が回転することにより発生する第1の遠心力の方向が前記第1および第2のシャフトを含む平面に対して垂直方向となるとき、前記第2の分銅が回転することにより発生する第2の遠心力の方向が前記平面に対して略反対方向になるように前記第1および第2の振動モータを駆動する制御部とを備える。
【0009】
本発明にかかる振動モータ駆動方法は、
第1のシャフトに第1の分銅が固定された第1の振動モータを筐体に実装すると共に、第2のシャフトに第2の分銅が固定された第2の振動モータを、前記第2のシャフトが前記第1のシャフトと略平行になるように前記筐体に実装し、前記第1の分銅が回転することにより発生する第1の遠心力の方向が前記第1および第2のシャフトを含む平面に対して垂直方向となるとき、前記第2の分銅が回転することにより発生する第2の遠心力の方向が前記平面に対して略反対方向になるように前記第1および第2の振動モータを駆動する。
【発明の効果】
【0010】
本発明によれば、ユーザが体感する振動量を大きなものとすることができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施の形態の構成例を示すブロック図である。
【図2】振動モータ2,3の実装方法の一例を示す図である。
【図3】振動モータ2,3の実装方法の他の例を示す図である。
【図4】振動モータ2,3の停止時の分銅2a,3aの停止位置を示す図である。
【図5】振動モータ2,3を回転させた際の遠心力の方向を示す図である。
【図6】振動モータ2,3を回転させた際の遠心力の方向を示す図である。
【図7】振動モータ2,3を回転させた際の遠心力の方向を示す図である。
【図8】振動モータ2,3を回転させた際の遠心力の方向を示す図である。
【図9】タッチパネル11に指14が接触したときの動作を説明するための図である。
【図10】分銅への磁性体の取り付け方法の一例を示す図である。
【図11】本発明の第2の実施の形態の構成例を示すブロック図である。
【図12】第2の実施の形態の動作を説明するための図である。
【図13】本発明の第3の実施の形態の構成例を示す図である。
【図14】第3の実施の形態の動作を説明するための図である。
【発明を実施するための形態】
【0012】
次に、本発明の実施の形態について詳細に説明する。
【0013】
[本発明の第1の実施の形態]
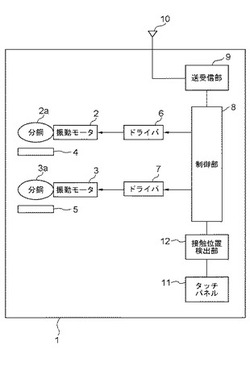
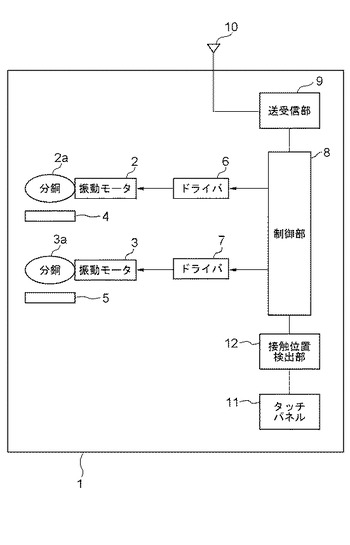
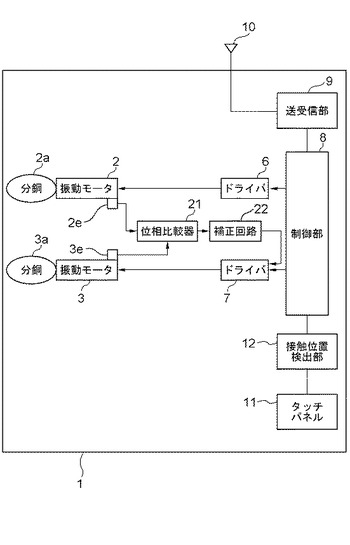
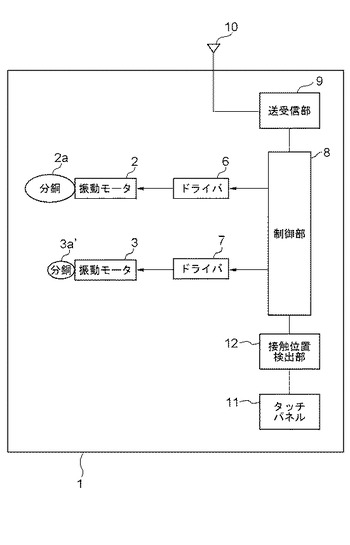
図1を参照すると、本発明の第1の実施の形態にかかるモバイル機器は、筐体1内に振動モータ2,3と、磁石4,5と、ドライバ6,7と、CPUなどで実現される制御部8と、送受信部9と、アンテナ10と、タッチパネル11と、接触位置検出部12とが実装されている。また、振動モータ2,3のシャフトにはそれぞれ分銅2a,3aが固定されている。分銅2a,3aの重量は略等しい。
【0014】
送受信部9は、アンテナ10を介して信号を送受信する機能を有する。接触位置検出部12は、タッチパネル11にユーザの指などが接触した際、その位置を制御部8に通知する機能を有する。制御部8は、着信時に振動モータ2,3を回転させるための指示をドライバ6,7に対して出力したり、接触位置検出部12から接触位置が通知された際、ドライバ6,7の内の一方に振動モータを回転させるための指示を出力する機能を有する。
【0015】
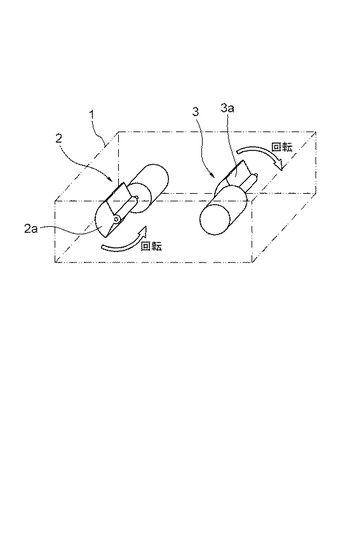
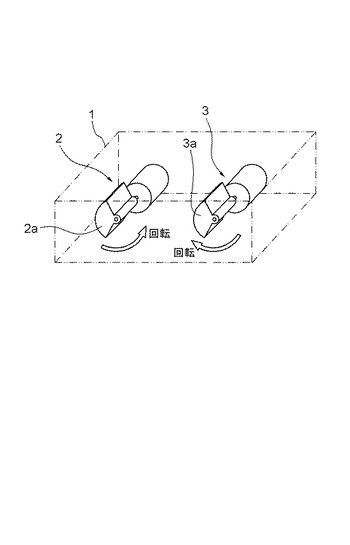
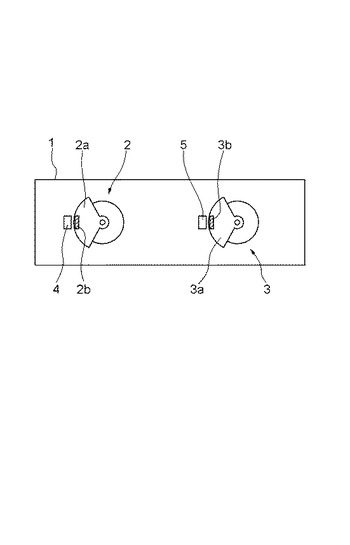
図2を参照すると、振動モータ2,3は、筐体1のほぼ両端に、振動モータ2,3のシャフトがほぼ平行になり、且つ向きが逆になるように実装されている。そして、振動モータ2,3の回転方向は同一にする。従って、図2のように振動モータ2,3を実装した場合には、見かけ上の回転方向は逆回転となる。本実施の形態では、振動モータ2,3を図2に示すように実装するが、図3に示すようにしても良い。即ち、筐体1のほぼ両端に、シャフトがほぼ平行になり、且つ向きが同じになるように実装してもよい。但し、このように実装させた場合には、振動モータ2,3の回転方向が逆方向となるようにする。
【0016】
振動モータ2,3は一般的な振動モータであり、実際にはモバイル機器と電気的な接続を行う+端子および−端子のバネ接点もしくはケーブルが設けられており、これにモバイル機器より電源供給を受け回転を行う。また筐体1には振動モータ2,3を固定するためのホルダ部が設けられ、この部位に振動モータ2,3を取り付けることで振動モータ2,3で発生された振動を筐体1に伝える。これらの構造は振動モータの設計においてはごく一般的な内容であるため、図解を省略している。
【0017】
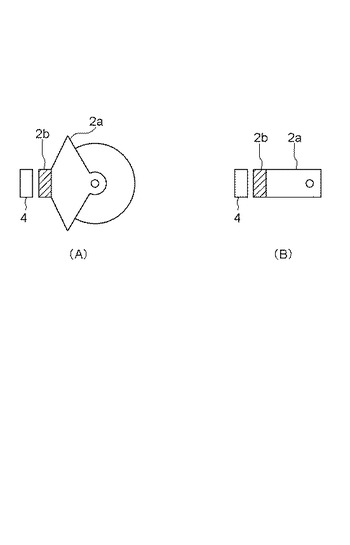
図4を参照すると、分銅2a、3aにはその一部または全てに磁性体2b,3bが用いている。また、筐体1には分銅2,3の近傍に磁石4,5が取り付けられている。従って、分銅が回転していない時は、分銅2a,3aに取り付けられた磁性体2b,3bが磁石に引き寄せられ、常に同じ位置で停止する。この場合、磁性体2b,3bの分銅円周方向の幅は、磁石4,5の円周方向における幅と等しいことが望ましいが、分銅の位置ズレによる最大振動量が許容範囲内であれば、幅は等しくなくともよい。
【0018】
[第1の実施の形態の動作の説明]
次に、本実施の形態の動作を図面を参照して詳細に説明する。
【0019】
振動モータ2,3が回転していない状態では、図4に示すように、分銅2a,3aはそれに設けられた磁性体2b,3bが筐体1内に取り付けられた磁石4,5に引き寄せられて、決まった位置で停止している。より具体的には、振動モータ2,3の左側に磁石4,5が設けられていることにより、分銅2a,3aは磁性体が引き寄せられ振動モータ2,3の本体の左側に停止している。
【0020】
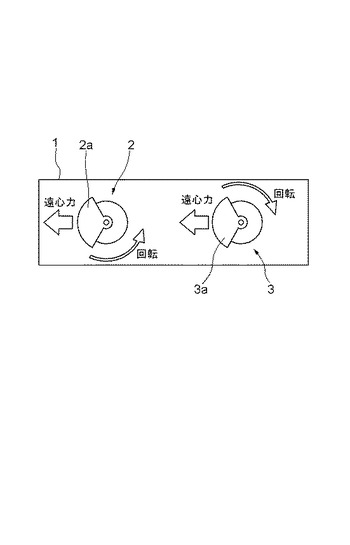
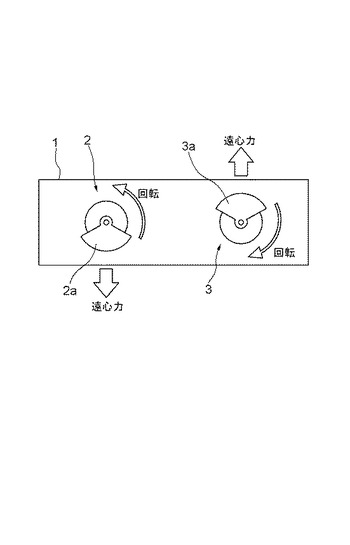
その後、着信があると、制御部8は、ドライバ6,7に指示を出し、振動モータ2,3を同一方向に、同一速度で回転させる。本実施の形態では、振動モータ2,3は、図2に示すように逆向きに実装されているので、図5に示すように、分銅2aは反時計回りに、分銅3aは時計回りに回転を始める。そして、図5→図6→図7→図8→図5→・・・のように回転状態を繰り返す。
【0021】
その後、制御部8がドライバ6,7に対して回転停止を指示することにより電源供給が停止されると、分銅2a,3aの回転力弱まって行き、最終的に筐体1に設けられた磁石4,5が分銅2a,3aに設けられた磁性体2b,3bを引き寄せる力が勝り、結果として図4に示す状態で分銅2a,3aは停止する。使う振動モータによっては内部永久磁石と鉄心との位置で停止する可能性もあるので、磁石が磁性体を引き寄せる力>モータが回転する力となる程度でゆっくり回転させる区間を設けてもよい。
【0022】
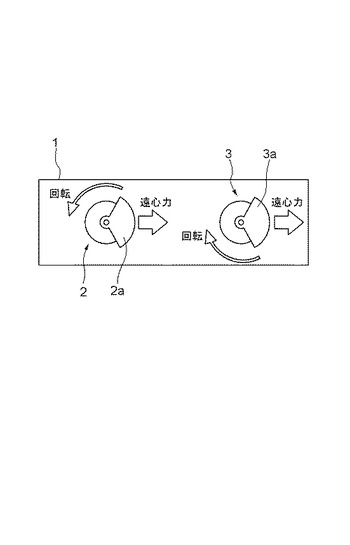
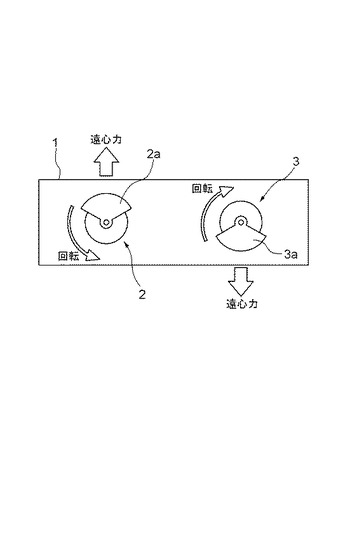
ここで、図5および図7に示すように、一方の分銅(例えば、分銅2a)の回転により発生する遠心力の方向が振動モータ2,3のシャフトを含む平面と平行な場合は、他方の分銅3aの回転により発生する遠心力も同一方向になるので、大きな振動量を得ることが可能になる。また、図6、図8に示すように、一方の分銅2aの回転により発生する遠心力の方向が振動モータ2,3のシャフトを含む平面に対して垂直方向となるとき、他方の分銅3aの回転により発生する遠心力の方向が上記平面に対して反対方向となる。このように遠心力の作用する方向が反対方向になると、筐体1を握っているユーザの手を中心として筐体1を回転させる力が発生するため、ユーザが体感する振動は大きくなる。
【0023】
次に、ユーザがタッチパネル11にタッチした場合の動作について説明する。振動モータは、近年モバイル機器に搭載されるタッチパネルのフィードバック(タッチパネルに触れた際に、正常に作動していることを使用者に認識させるための振動)に使用されるケースがある。この時の振動量は通常の着信等を知らせるためのものほど強い必要はない。そこで、本実施の形態では、着信の際は先に示したように2つの振動モータ2、3を動作させることで大きな振動量を発生させ、タッチパネルのフィードバックに用いる場合は振動モータ2,3のどちらか1つだけを振動させる。これにより、タッチパネルのフィードバックの際の消費電力を半分にすることが可能となる。
【0024】
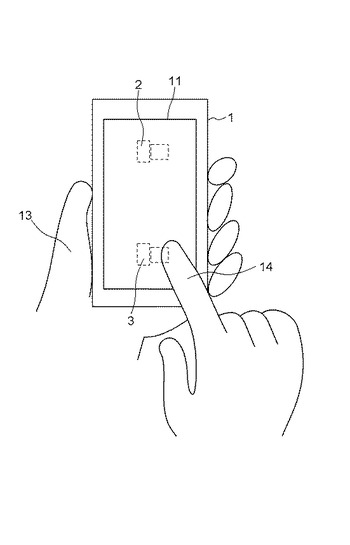
今、例えば、図9に示すように、ユーザの指14がタッチパネル11と接触したとすると、接触位置検出部12が制御部8に接触位置を通知する。これにより、制御部8はドライバ6,7の内の一方に指示を出し、振動モータ2,3の内の一方を回転させる。
【0025】
どちらの振動モータを回転させるかは、ユーザが設定しておく。例えば、モバイル機器の筐体1を持つ手13で振動を確認したいユーザは、手13で振動を確認しやすい方の振動モータを回転させるように設定しておく。
【0026】
また、接触位置に応じて振動モータ2,3の内の一方を回転させるようにしてもよい。この場合、図示を省略したメモリに、振動モータ2を回転させる接触位置の範囲(X0,Y0)〜(Xi,Yj)と、振動モータ3を回転させる接触位置の範囲(X0,Yj+1)〜(Xi,Y2i+1)とを記録しておく。なお、範囲(X0,Y0)〜(Xi,Yj)、(X0,Yj+1)〜(Xi,Y2i+1)は、タッチパネル11の上半分、下半分の領域を表している。そして、制御部8は、接触位置検出部12から接触位置(X,Y)が入力された場合は、メモリを参照して接触位置がタッチパネルの上半分なのか下半分なのかを判断し、上半分であった場合は振動モータ2を回転させ、下半分であった場合は、振動モータ3を回転させる。
【0027】
なお、上述した説明では、図4に示すように磁石4,5を配置し、振動モータ2,3の停止時に分銅2a,3aの向きが同じになるようにしたが、回転中の分銅の遠心力の関係が上記したものと同じになるのであれば、これに限らない。例えば、一方の磁石(例えば、磁石4)を振動モータの上側に配置し、他方の磁石5を振動モータの下側に配置するようにしても良い。また、期待する最大遠心力に合わせ、位置は若干ずれていても構わない。また、分銅を所定位置に停止させる手段として、磁石以外の手段を用いてもよい。
【0028】
また、上記した説明では、分銅2a,3aに磁石4,5と円周方向の幅が略等しい磁性体2b,3bを備える構成としたが、分銅そのものを磁性体、例えば鉄で構成してもよい。その際には停止位置の精度を上げるために、分銅2aの停止位置を決めるための磁石4の幅と略同じであって、磁石4との距離が他の分銅を構成する部材と比べ極めて近くなるような略突起状の形状となる分銅であれば好ましい。分銅の突起幅は同じとしたが、幅は狭くても広くても停止位置の誤差範囲内であれば問題ない。本突起状の形状の構成は分銅が全て磁性体だけではなく、図10に示すように、分銅2aの突起先端に磁性体2bを備える構成で用いてもよい。
【0029】
[第1の実施の形態の効果]
本実施の形態によれば、ユーザが体感する振動量を大きなものとすることができる。その理由は、分銅2aが回転することにより発生する遠心力の方向が振動モータ2,3のシャフトを含む平面に対して垂直方向となるとき、分銅3が回転することにより発生する遠心力の方向が上記平面に対して反対方向になるように振動モータ2,3を駆動するようにしているからである。上記したように、遠心力の作用する方向を反対方向にすると、筐体1を握っているユーザの手を中心として筐体1を回転させる力が発生するため、ユーザが体感する振動は大きくなる。
【0030】
更に、本実施の形態では、分銅2aによる遠心力の方向が、両モータ2,3のシャフトを含む平面と平行で且つ振動モータ2のシャフトと直交する方向になるとき、分銅3aによる遠心力の方向が分銅2aによる遠心力と同一方向となるように振動モータ2,3を駆動するようにしているからである。
【0031】
また、本実施の形態は、ユーザの指がタッチパネル11に接触したときには、振動モータ2,3の内の一方を駆動するようにしているので、少ない消費電力で、タッチパネルのフィードバックを実現することが可能になる。
【0032】
[本発明の第2の実施の形態]
次に、本発明の第2の実施の形態について説明する。本実施の形態は、振動モータ2,3の停止時に、分銅2a,3aを所定位置に停止させるための磁石を不要にしたことを特徴とする。
【0033】
図11は、本実施の形態の構成例を示すブロック図であり、図1に示した第1の実施の形態との相違点は、振動モータ2,3がエンコーダ2e,3eを備えている点、位相比較器21が追加されている点、補正回路22が追加されている点、および、磁石4,5が実装されていない点である。
【0034】
振動モータ2,3は、シャフトが1回転する毎にパルス信号を出力するエンコーダ2e,3eを備えている。パルス信号はシャフト側に設けた磁石と、振動モータ本体側に設けたホール素子との位置関係が所定の関係になったときに出力される。また、分銅2a,3aの偏重心方向が予め決めた方向になったとき、パルス信号が出力されるように構成されている。
【0035】
また、エンコーダ2e,3eの出力は、位相比較器21に接続され、位相比較器21は、互いの出力を基に振動モータ2,3同士の回転の位相差と、どちらの振動モータの方が回転角(位相)が進んでいるのかを示す信号を出力する。位相差はXOR(排他的論理和)で、向きはゼロ出力からの先出力判定回路で簡略的に出力してもよい。
【0036】
なお、振動モータ2,3は、図2に示すように実装され、振動モータ2,3の回転時には、分銅2aは反時計回り、分銅3aは時計回りで回転する。また、制御部8は、着信自には第1の実施の形態と同様にドライバ6,7に対して回転速度ωで振動モータ2,3を回転させることを指示する。
【0037】
位相比較器21の出力は補正回路22に入力される。補正回路22は、位相比較器21の出力に基づいて、振動モータ2,3の位相(回転角)を同一にするための補正量Δω(回転速度の補正量)を求め、ドライバ7に出力する。ドライバ7は、制御部8から指示されている回転速度ωを補正回路22からの補正量で補正した回転速度で振動モータ3を回転させる。
【0038】
[第2の実施の形態の動作の説明]
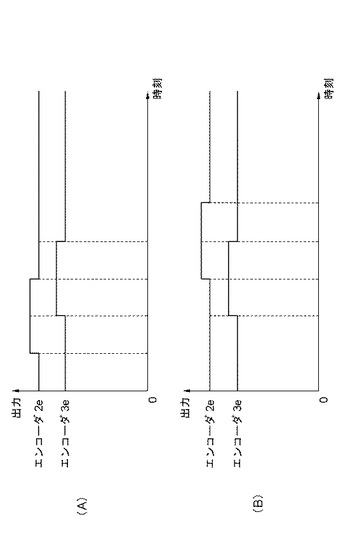
次に本実施の形態の動作を図12を参照して説明する。図12は、振動モータ2,3のエンコーダ2e,3eの出力を示した図で、縦軸は出力、横軸は時刻を表す。
【0039】
図12(A)は、振動モータ2の分銅2aが、振動モータ3の分銅3aとの相対関係に対し、先に進んでいる時の図である。この場合、振動モータ2のエンコーダ2eの出力が先に立ち上がっているので、位相比較器21では、振動モータ2の分銅2aが先に進んでいると判定でき、判定結果を示す信号を補正回路22に対して出力する。また、位相比較器21は、振動モータ2,3のエンコーダ出力のXORを、両モータ2,3の位相差として出力する。補正回路22は、位相比較器21の出力に基づいて、振動モータ3の回転速度を振動モータ2の回転速度に一致させるための補正量Δωを算出し、ドライバ7に加える。なお、Δωは、位相差に大きいほど大きくなる正の値である。ドライバ7は、補正量Δωが指示されると、制御部8によって指示されている回転速度ωを補正量Δωで補正した回転速度ω+Δωで回転させる。
【0040】
また、図12(B)は、振動モータ3の分銅3aが、振動モータ2の分銅2aとの相対関係に対し、先に進んでいるときの図である。この場合、振動モータ3のエンコーダ3eの出力が先に立ち上がっているので、位相比較器21では、振動モータ3の分銅3aが先に進んでいると判定でき、判定結果を示す信号を補正回路22に対して出力する。また、位相比較器21は、振動モータ2,3のエンコーダ出力のXORを、両モータ2,3の位相差として出力する。補正回路22は、位相比較器21の出力に基づいて、振動モータ3の回転速度を振動モータ2の回転速度に一致させるための補正量−Δω(振動モータ3の方が位相が進んでいるので、補正量はマイナスの値になる)を算出し、ドライバ7に加える。ドライバ7は、補正量−Δωが指示されると、制御部8によって指示されている回転速度ωを補正量−Δωで補正した回転速度ω−Δωで回転させる。
【0041】
本実施の形態では振動モータ2,3のエンコーダ2e,3eの出力を位相比較して振動モータ2,3の回転速度を微調整することで分銅2a,3aの停止位置がずれた状態で回転を開始しても回転するに伴って次第と分銅2a,3aの相対位置が期待した位置へと安定する。またこの構成によって、モバイル端末の固有振動数や分銅を回転しうるに必要なモータトルクや電流供給能力によっては振動モータによる振動が乱れることもあるので、少なくとも1回転で1出力するエンコーダを備えた振動モータであって、2つの振動モータ2,3の回転位置の位相差に応じて、振動モータ2,3の回転が同じになるように電流量を調整することで、安定した振動を得ることもできる。なお、本実施の形態でも、第1の実施の形態と同様に、磁石4,5を使用するようにしても良い。
【0042】
なお、以上の説明では述べなかったが、振動モータ2,3として、位置制御可能なステップモータを使用することにより、磁石4,5を不要にし、更に、エンコーダ2e,3eと、位相比較器21と、補正回路22を不要にすることができる。但し、この場合には、工場出荷時に、分銅2a,3aの停止位置を所定位置にしておくことが必要になる。
【0043】
[第2の実施の形態の効果]
本実施の形態によれば、第1の実施の形態で得られ効果に加え、振動モータ2,3の停止時に分銅2a,3aの位置を所定位置に固定するための磁石4,5が不要になるという効果を得ることができる。
【0044】
[本発明の第3の実施の形態]
次に、本発明の第3の実施の形態について説明する。本実施の形態は、振動モータの停止時に分銅を所定位置で停止させるための磁石を不要にすると共に、略周期的な振動(メリハリのある振動)を発生させることを特徴とする。
【0045】
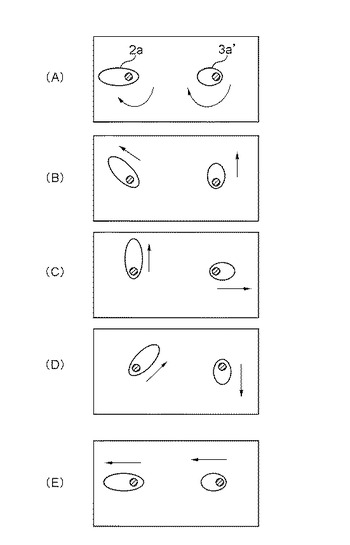
図13は本実施の形態の構成例を示すブロック図である。本実施の形態では、制御部8は、振動モータ2の分銅2aが回転速度ωで回転し、振動モータ3の分銅3a’が回転速度kω(kはゼロ以上の実数で、1を除く)で回転するようにドライバ6,7に対して指示を出す。ここで、k>1ならば、分銅2a,3a’の質量を、その回転によって発生する遠心力が同じになるような重量(分銅2a重量>分銅3a’の重量)とする。このようにすることにより、あるタイミングでは、互いの遠心力を打ち消し合い、別のタイミングでは同じ方向の遠心力が発生し、合成結果、2倍の遠心力が生ずるためん、メリハリのある振動が発生する。
【0046】
図14を参照して、本実施の形態の動作を説明する。図14では、分銅2a,3a’の速度をそれぞれω,2ωとし、分銅2aの重量が、分銅3a’の4倍としている。また、分銅2a,3a’は共に時計回りで回転している。また、また図中の遠心力方向を示す矢印は概略図で向きや大きさは概ねの向き、方向を示す。
【0047】
図14(A)〜(E)は、分銅2aが45度、分銅3a’が90度回転する毎の遠心力の方向を示している。分銅3a’が最初に1回転した時の合成遠心力はゼロ、分銅3a’
が2回転したときの合成遠心力は最大となる。
【0048】
第1の実施の形態と異なり、磁石4,5で停止位置を決めることは行っていないが、分銅2a,3a’とがある回転速度差(1−k)ωをもって回転しているので、分銅2aの遠心力と、分銅3a’の遠心力との相対位置関係は都度変化し、合成遠心力としては略周期的な変化をなす。
【0049】
なお、本実施の形態では、2つの振動モータ2,3の回転速度を異なるものにしたが、第1の実施の形態と同様に、両モータ2,3の回転速度を同じにしてもよい。
【0050】
[第3の実施の形態の効果]
本実施の形態によれば、磁石4,5を不要にすることができるという効果を得ることができると共に、メリハリのある振動を発生させることができるという効果を得ることができる。その理由は、分銅2a,3a’の重量を異なるものとし、且つ、分銅2a,3a’による遠心力が略等しくなるように、分銅2a,3a’を同一方向に回転させるようにしているからである。
【産業上の利用可能性】
【0051】
本発明は、携帯電話機などのモバイル機器の着信通知機能や、タッチパネルに接触した際のフィードバック機能などに適用することができる。
【符号の説明】
【0052】
1 筐体
2,3 振動モータ
2a,3a 分銅
2b,3b 磁性体
2e,3e エンコーダ
4,5 磁石
6,7 ドライバ
8 制御部
9 送受信部
10 アンテナ
11 タッチパネル
12 接触位置検出部
13 手
14 指
21 位相比較器
22 補正回路
【技術分野】
【0001】
本発明は、振動モータにより着信等を知らせる機能を持つ携帯電話等のモバイル機器に関する。
【背景技術】
【0002】
従来、モバイル機器の着信等を知らせるための振動モータにおいては、ユーザに振動を確実に伝える必要があり、そのため出来るだけ振動量を大きくする必要があり、結果として出来るだけ大きな振動モータを実装する必要があった。逆にモバイル機器を出来るだけ薄く(小さく)するためには振動モータは小さい物を使用する必要があり、結果として振動量が小さくなり、モバイル機器の使用者が振動モータの振動を認識し難くなるといった問題があった。
【0003】
このような問題を解決するために、例えば、複数の振動モータをモバイル機器に実装することが考えられ、この種の技術としては次のような技術が知られている(例えば、特許文献1参照)。複数の振動モータを使用することにより、単純に1個の振動モータを実装するよりも小型のモータを使用することが可能となるので、モバイル機器筐体の狭いスペースにも実装することが可能になる。
【0004】
特許文献1に記載されている技術は、モバイル機器の筐体内に2つの振動モータを互いのシャフトが平行になるように配置し、2つの振動モータを同期させて互いに逆位相で回転させている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−248426号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されている技術によれば、一方の振動モータで発生する遠心力が下向きの時は他方の振動モータで発生する遠心力も下向きとなり、一方の振動モータで発生する遠心力が上向きの時は他方の振動モータで発生する遠心力も上向きとなるので、上下方向の振動量は振動モータを1個だけ使用した場合に比較して大きくなる。しかし、単に上下方向の振動量が大きくなるだけであるので、ユーザの感じる振動を十分なものにすることができないという課題がある。
【0007】
[発明の目的]
そこで、本発明の目的は、単に上下方向の振動量が大きくなるだけであるので、ユーザの感じる振動を十分なものにすることができないという課題を解決したモバイル機器を提供することにある。
【課題を解決するための手段】
【0008】
本発明にかかるモバイル機器は、
筐体と、
第1のシャフトに第1の分銅が固定され、前記筐体に実装された第1の振動モータと、
第2のシャフトに第2の分銅が固定され、前記第2のシャフトが前記第1のシャフトと略平行になるように前記筐体に実装された第2の振動モータと、
前記第1の分銅が回転することにより発生する第1の遠心力の方向が前記第1および第2のシャフトを含む平面に対して垂直方向となるとき、前記第2の分銅が回転することにより発生する第2の遠心力の方向が前記平面に対して略反対方向になるように前記第1および第2の振動モータを駆動する制御部とを備える。
【0009】
本発明にかかる振動モータ駆動方法は、
第1のシャフトに第1の分銅が固定された第1の振動モータを筐体に実装すると共に、第2のシャフトに第2の分銅が固定された第2の振動モータを、前記第2のシャフトが前記第1のシャフトと略平行になるように前記筐体に実装し、前記第1の分銅が回転することにより発生する第1の遠心力の方向が前記第1および第2のシャフトを含む平面に対して垂直方向となるとき、前記第2の分銅が回転することにより発生する第2の遠心力の方向が前記平面に対して略反対方向になるように前記第1および第2の振動モータを駆動する。
【発明の効果】
【0010】
本発明によれば、ユーザが体感する振動量を大きなものとすることができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施の形態の構成例を示すブロック図である。
【図2】振動モータ2,3の実装方法の一例を示す図である。
【図3】振動モータ2,3の実装方法の他の例を示す図である。
【図4】振動モータ2,3の停止時の分銅2a,3aの停止位置を示す図である。
【図5】振動モータ2,3を回転させた際の遠心力の方向を示す図である。
【図6】振動モータ2,3を回転させた際の遠心力の方向を示す図である。
【図7】振動モータ2,3を回転させた際の遠心力の方向を示す図である。
【図8】振動モータ2,3を回転させた際の遠心力の方向を示す図である。
【図9】タッチパネル11に指14が接触したときの動作を説明するための図である。
【図10】分銅への磁性体の取り付け方法の一例を示す図である。
【図11】本発明の第2の実施の形態の構成例を示すブロック図である。
【図12】第2の実施の形態の動作を説明するための図である。
【図13】本発明の第3の実施の形態の構成例を示す図である。
【図14】第3の実施の形態の動作を説明するための図である。
【発明を実施するための形態】
【0012】
次に、本発明の実施の形態について詳細に説明する。
【0013】
[本発明の第1の実施の形態]
図1を参照すると、本発明の第1の実施の形態にかかるモバイル機器は、筐体1内に振動モータ2,3と、磁石4,5と、ドライバ6,7と、CPUなどで実現される制御部8と、送受信部9と、アンテナ10と、タッチパネル11と、接触位置検出部12とが実装されている。また、振動モータ2,3のシャフトにはそれぞれ分銅2a,3aが固定されている。分銅2a,3aの重量は略等しい。
【0014】
送受信部9は、アンテナ10を介して信号を送受信する機能を有する。接触位置検出部12は、タッチパネル11にユーザの指などが接触した際、その位置を制御部8に通知する機能を有する。制御部8は、着信時に振動モータ2,3を回転させるための指示をドライバ6,7に対して出力したり、接触位置検出部12から接触位置が通知された際、ドライバ6,7の内の一方に振動モータを回転させるための指示を出力する機能を有する。
【0015】
図2を参照すると、振動モータ2,3は、筐体1のほぼ両端に、振動モータ2,3のシャフトがほぼ平行になり、且つ向きが逆になるように実装されている。そして、振動モータ2,3の回転方向は同一にする。従って、図2のように振動モータ2,3を実装した場合には、見かけ上の回転方向は逆回転となる。本実施の形態では、振動モータ2,3を図2に示すように実装するが、図3に示すようにしても良い。即ち、筐体1のほぼ両端に、シャフトがほぼ平行になり、且つ向きが同じになるように実装してもよい。但し、このように実装させた場合には、振動モータ2,3の回転方向が逆方向となるようにする。
【0016】
振動モータ2,3は一般的な振動モータであり、実際にはモバイル機器と電気的な接続を行う+端子および−端子のバネ接点もしくはケーブルが設けられており、これにモバイル機器より電源供給を受け回転を行う。また筐体1には振動モータ2,3を固定するためのホルダ部が設けられ、この部位に振動モータ2,3を取り付けることで振動モータ2,3で発生された振動を筐体1に伝える。これらの構造は振動モータの設計においてはごく一般的な内容であるため、図解を省略している。
【0017】
図4を参照すると、分銅2a、3aにはその一部または全てに磁性体2b,3bが用いている。また、筐体1には分銅2,3の近傍に磁石4,5が取り付けられている。従って、分銅が回転していない時は、分銅2a,3aに取り付けられた磁性体2b,3bが磁石に引き寄せられ、常に同じ位置で停止する。この場合、磁性体2b,3bの分銅円周方向の幅は、磁石4,5の円周方向における幅と等しいことが望ましいが、分銅の位置ズレによる最大振動量が許容範囲内であれば、幅は等しくなくともよい。
【0018】
[第1の実施の形態の動作の説明]
次に、本実施の形態の動作を図面を参照して詳細に説明する。
【0019】
振動モータ2,3が回転していない状態では、図4に示すように、分銅2a,3aはそれに設けられた磁性体2b,3bが筐体1内に取り付けられた磁石4,5に引き寄せられて、決まった位置で停止している。より具体的には、振動モータ2,3の左側に磁石4,5が設けられていることにより、分銅2a,3aは磁性体が引き寄せられ振動モータ2,3の本体の左側に停止している。
【0020】
その後、着信があると、制御部8は、ドライバ6,7に指示を出し、振動モータ2,3を同一方向に、同一速度で回転させる。本実施の形態では、振動モータ2,3は、図2に示すように逆向きに実装されているので、図5に示すように、分銅2aは反時計回りに、分銅3aは時計回りに回転を始める。そして、図5→図6→図7→図8→図5→・・・のように回転状態を繰り返す。
【0021】
その後、制御部8がドライバ6,7に対して回転停止を指示することにより電源供給が停止されると、分銅2a,3aの回転力弱まって行き、最終的に筐体1に設けられた磁石4,5が分銅2a,3aに設けられた磁性体2b,3bを引き寄せる力が勝り、結果として図4に示す状態で分銅2a,3aは停止する。使う振動モータによっては内部永久磁石と鉄心との位置で停止する可能性もあるので、磁石が磁性体を引き寄せる力>モータが回転する力となる程度でゆっくり回転させる区間を設けてもよい。
【0022】
ここで、図5および図7に示すように、一方の分銅(例えば、分銅2a)の回転により発生する遠心力の方向が振動モータ2,3のシャフトを含む平面と平行な場合は、他方の分銅3aの回転により発生する遠心力も同一方向になるので、大きな振動量を得ることが可能になる。また、図6、図8に示すように、一方の分銅2aの回転により発生する遠心力の方向が振動モータ2,3のシャフトを含む平面に対して垂直方向となるとき、他方の分銅3aの回転により発生する遠心力の方向が上記平面に対して反対方向となる。このように遠心力の作用する方向が反対方向になると、筐体1を握っているユーザの手を中心として筐体1を回転させる力が発生するため、ユーザが体感する振動は大きくなる。
【0023】
次に、ユーザがタッチパネル11にタッチした場合の動作について説明する。振動モータは、近年モバイル機器に搭載されるタッチパネルのフィードバック(タッチパネルに触れた際に、正常に作動していることを使用者に認識させるための振動)に使用されるケースがある。この時の振動量は通常の着信等を知らせるためのものほど強い必要はない。そこで、本実施の形態では、着信の際は先に示したように2つの振動モータ2、3を動作させることで大きな振動量を発生させ、タッチパネルのフィードバックに用いる場合は振動モータ2,3のどちらか1つだけを振動させる。これにより、タッチパネルのフィードバックの際の消費電力を半分にすることが可能となる。
【0024】
今、例えば、図9に示すように、ユーザの指14がタッチパネル11と接触したとすると、接触位置検出部12が制御部8に接触位置を通知する。これにより、制御部8はドライバ6,7の内の一方に指示を出し、振動モータ2,3の内の一方を回転させる。
【0025】
どちらの振動モータを回転させるかは、ユーザが設定しておく。例えば、モバイル機器の筐体1を持つ手13で振動を確認したいユーザは、手13で振動を確認しやすい方の振動モータを回転させるように設定しておく。
【0026】
また、接触位置に応じて振動モータ2,3の内の一方を回転させるようにしてもよい。この場合、図示を省略したメモリに、振動モータ2を回転させる接触位置の範囲(X0,Y0)〜(Xi,Yj)と、振動モータ3を回転させる接触位置の範囲(X0,Yj+1)〜(Xi,Y2i+1)とを記録しておく。なお、範囲(X0,Y0)〜(Xi,Yj)、(X0,Yj+1)〜(Xi,Y2i+1)は、タッチパネル11の上半分、下半分の領域を表している。そして、制御部8は、接触位置検出部12から接触位置(X,Y)が入力された場合は、メモリを参照して接触位置がタッチパネルの上半分なのか下半分なのかを判断し、上半分であった場合は振動モータ2を回転させ、下半分であった場合は、振動モータ3を回転させる。
【0027】
なお、上述した説明では、図4に示すように磁石4,5を配置し、振動モータ2,3の停止時に分銅2a,3aの向きが同じになるようにしたが、回転中の分銅の遠心力の関係が上記したものと同じになるのであれば、これに限らない。例えば、一方の磁石(例えば、磁石4)を振動モータの上側に配置し、他方の磁石5を振動モータの下側に配置するようにしても良い。また、期待する最大遠心力に合わせ、位置は若干ずれていても構わない。また、分銅を所定位置に停止させる手段として、磁石以外の手段を用いてもよい。
【0028】
また、上記した説明では、分銅2a,3aに磁石4,5と円周方向の幅が略等しい磁性体2b,3bを備える構成としたが、分銅そのものを磁性体、例えば鉄で構成してもよい。その際には停止位置の精度を上げるために、分銅2aの停止位置を決めるための磁石4の幅と略同じであって、磁石4との距離が他の分銅を構成する部材と比べ極めて近くなるような略突起状の形状となる分銅であれば好ましい。分銅の突起幅は同じとしたが、幅は狭くても広くても停止位置の誤差範囲内であれば問題ない。本突起状の形状の構成は分銅が全て磁性体だけではなく、図10に示すように、分銅2aの突起先端に磁性体2bを備える構成で用いてもよい。
【0029】
[第1の実施の形態の効果]
本実施の形態によれば、ユーザが体感する振動量を大きなものとすることができる。その理由は、分銅2aが回転することにより発生する遠心力の方向が振動モータ2,3のシャフトを含む平面に対して垂直方向となるとき、分銅3が回転することにより発生する遠心力の方向が上記平面に対して反対方向になるように振動モータ2,3を駆動するようにしているからである。上記したように、遠心力の作用する方向を反対方向にすると、筐体1を握っているユーザの手を中心として筐体1を回転させる力が発生するため、ユーザが体感する振動は大きくなる。
【0030】
更に、本実施の形態では、分銅2aによる遠心力の方向が、両モータ2,3のシャフトを含む平面と平行で且つ振動モータ2のシャフトと直交する方向になるとき、分銅3aによる遠心力の方向が分銅2aによる遠心力と同一方向となるように振動モータ2,3を駆動するようにしているからである。
【0031】
また、本実施の形態は、ユーザの指がタッチパネル11に接触したときには、振動モータ2,3の内の一方を駆動するようにしているので、少ない消費電力で、タッチパネルのフィードバックを実現することが可能になる。
【0032】
[本発明の第2の実施の形態]
次に、本発明の第2の実施の形態について説明する。本実施の形態は、振動モータ2,3の停止時に、分銅2a,3aを所定位置に停止させるための磁石を不要にしたことを特徴とする。
【0033】
図11は、本実施の形態の構成例を示すブロック図であり、図1に示した第1の実施の形態との相違点は、振動モータ2,3がエンコーダ2e,3eを備えている点、位相比較器21が追加されている点、補正回路22が追加されている点、および、磁石4,5が実装されていない点である。
【0034】
振動モータ2,3は、シャフトが1回転する毎にパルス信号を出力するエンコーダ2e,3eを備えている。パルス信号はシャフト側に設けた磁石と、振動モータ本体側に設けたホール素子との位置関係が所定の関係になったときに出力される。また、分銅2a,3aの偏重心方向が予め決めた方向になったとき、パルス信号が出力されるように構成されている。
【0035】
また、エンコーダ2e,3eの出力は、位相比較器21に接続され、位相比較器21は、互いの出力を基に振動モータ2,3同士の回転の位相差と、どちらの振動モータの方が回転角(位相)が進んでいるのかを示す信号を出力する。位相差はXOR(排他的論理和)で、向きはゼロ出力からの先出力判定回路で簡略的に出力してもよい。
【0036】
なお、振動モータ2,3は、図2に示すように実装され、振動モータ2,3の回転時には、分銅2aは反時計回り、分銅3aは時計回りで回転する。また、制御部8は、着信自には第1の実施の形態と同様にドライバ6,7に対して回転速度ωで振動モータ2,3を回転させることを指示する。
【0037】
位相比較器21の出力は補正回路22に入力される。補正回路22は、位相比較器21の出力に基づいて、振動モータ2,3の位相(回転角)を同一にするための補正量Δω(回転速度の補正量)を求め、ドライバ7に出力する。ドライバ7は、制御部8から指示されている回転速度ωを補正回路22からの補正量で補正した回転速度で振動モータ3を回転させる。
【0038】
[第2の実施の形態の動作の説明]
次に本実施の形態の動作を図12を参照して説明する。図12は、振動モータ2,3のエンコーダ2e,3eの出力を示した図で、縦軸は出力、横軸は時刻を表す。
【0039】
図12(A)は、振動モータ2の分銅2aが、振動モータ3の分銅3aとの相対関係に対し、先に進んでいる時の図である。この場合、振動モータ2のエンコーダ2eの出力が先に立ち上がっているので、位相比較器21では、振動モータ2の分銅2aが先に進んでいると判定でき、判定結果を示す信号を補正回路22に対して出力する。また、位相比較器21は、振動モータ2,3のエンコーダ出力のXORを、両モータ2,3の位相差として出力する。補正回路22は、位相比較器21の出力に基づいて、振動モータ3の回転速度を振動モータ2の回転速度に一致させるための補正量Δωを算出し、ドライバ7に加える。なお、Δωは、位相差に大きいほど大きくなる正の値である。ドライバ7は、補正量Δωが指示されると、制御部8によって指示されている回転速度ωを補正量Δωで補正した回転速度ω+Δωで回転させる。
【0040】
また、図12(B)は、振動モータ3の分銅3aが、振動モータ2の分銅2aとの相対関係に対し、先に進んでいるときの図である。この場合、振動モータ3のエンコーダ3eの出力が先に立ち上がっているので、位相比較器21では、振動モータ3の分銅3aが先に進んでいると判定でき、判定結果を示す信号を補正回路22に対して出力する。また、位相比較器21は、振動モータ2,3のエンコーダ出力のXORを、両モータ2,3の位相差として出力する。補正回路22は、位相比較器21の出力に基づいて、振動モータ3の回転速度を振動モータ2の回転速度に一致させるための補正量−Δω(振動モータ3の方が位相が進んでいるので、補正量はマイナスの値になる)を算出し、ドライバ7に加える。ドライバ7は、補正量−Δωが指示されると、制御部8によって指示されている回転速度ωを補正量−Δωで補正した回転速度ω−Δωで回転させる。
【0041】
本実施の形態では振動モータ2,3のエンコーダ2e,3eの出力を位相比較して振動モータ2,3の回転速度を微調整することで分銅2a,3aの停止位置がずれた状態で回転を開始しても回転するに伴って次第と分銅2a,3aの相対位置が期待した位置へと安定する。またこの構成によって、モバイル端末の固有振動数や分銅を回転しうるに必要なモータトルクや電流供給能力によっては振動モータによる振動が乱れることもあるので、少なくとも1回転で1出力するエンコーダを備えた振動モータであって、2つの振動モータ2,3の回転位置の位相差に応じて、振動モータ2,3の回転が同じになるように電流量を調整することで、安定した振動を得ることもできる。なお、本実施の形態でも、第1の実施の形態と同様に、磁石4,5を使用するようにしても良い。
【0042】
なお、以上の説明では述べなかったが、振動モータ2,3として、位置制御可能なステップモータを使用することにより、磁石4,5を不要にし、更に、エンコーダ2e,3eと、位相比較器21と、補正回路22を不要にすることができる。但し、この場合には、工場出荷時に、分銅2a,3aの停止位置を所定位置にしておくことが必要になる。
【0043】
[第2の実施の形態の効果]
本実施の形態によれば、第1の実施の形態で得られ効果に加え、振動モータ2,3の停止時に分銅2a,3aの位置を所定位置に固定するための磁石4,5が不要になるという効果を得ることができる。
【0044】
[本発明の第3の実施の形態]
次に、本発明の第3の実施の形態について説明する。本実施の形態は、振動モータの停止時に分銅を所定位置で停止させるための磁石を不要にすると共に、略周期的な振動(メリハリのある振動)を発生させることを特徴とする。
【0045】
図13は本実施の形態の構成例を示すブロック図である。本実施の形態では、制御部8は、振動モータ2の分銅2aが回転速度ωで回転し、振動モータ3の分銅3a’が回転速度kω(kはゼロ以上の実数で、1を除く)で回転するようにドライバ6,7に対して指示を出す。ここで、k>1ならば、分銅2a,3a’の質量を、その回転によって発生する遠心力が同じになるような重量(分銅2a重量>分銅3a’の重量)とする。このようにすることにより、あるタイミングでは、互いの遠心力を打ち消し合い、別のタイミングでは同じ方向の遠心力が発生し、合成結果、2倍の遠心力が生ずるためん、メリハリのある振動が発生する。
【0046】
図14を参照して、本実施の形態の動作を説明する。図14では、分銅2a,3a’の速度をそれぞれω,2ωとし、分銅2aの重量が、分銅3a’の4倍としている。また、分銅2a,3a’は共に時計回りで回転している。また、また図中の遠心力方向を示す矢印は概略図で向きや大きさは概ねの向き、方向を示す。
【0047】
図14(A)〜(E)は、分銅2aが45度、分銅3a’が90度回転する毎の遠心力の方向を示している。分銅3a’が最初に1回転した時の合成遠心力はゼロ、分銅3a’
が2回転したときの合成遠心力は最大となる。
【0048】
第1の実施の形態と異なり、磁石4,5で停止位置を決めることは行っていないが、分銅2a,3a’とがある回転速度差(1−k)ωをもって回転しているので、分銅2aの遠心力と、分銅3a’の遠心力との相対位置関係は都度変化し、合成遠心力としては略周期的な変化をなす。
【0049】
なお、本実施の形態では、2つの振動モータ2,3の回転速度を異なるものにしたが、第1の実施の形態と同様に、両モータ2,3の回転速度を同じにしてもよい。
【0050】
[第3の実施の形態の効果]
本実施の形態によれば、磁石4,5を不要にすることができるという効果を得ることができると共に、メリハリのある振動を発生させることができるという効果を得ることができる。その理由は、分銅2a,3a’の重量を異なるものとし、且つ、分銅2a,3a’による遠心力が略等しくなるように、分銅2a,3a’を同一方向に回転させるようにしているからである。
【産業上の利用可能性】
【0051】
本発明は、携帯電話機などのモバイル機器の着信通知機能や、タッチパネルに接触した際のフィードバック機能などに適用することができる。
【符号の説明】
【0052】
1 筐体
2,3 振動モータ
2a,3a 分銅
2b,3b 磁性体
2e,3e エンコーダ
4,5 磁石
6,7 ドライバ
8 制御部
9 送受信部
10 アンテナ
11 タッチパネル
12 接触位置検出部
13 手
14 指
21 位相比較器
22 補正回路
【特許請求の範囲】
【請求項1】
筐体と、
第1のシャフトに第1の分銅が固定され、前記筐体に実装された第1の振動モータと、
第2のシャフトに第2の分銅が固定され、前記第2のシャフトが前記第1のシャフトと略平行になるように前記筐体に実装された第2の振動モータと、
前記第1の分銅が回転することにより発生する第1の遠心力の方向が前記第1および第2のシャフトを含む平面に対して垂直方向となるとき、前記第2の分銅が回転することにより発生する第2の遠心力の方向が前記平面に対して略反対方向になるように前記第1および第2の振動モータを駆動する制御部とを備えることを特徴とするモバイル機器。
【請求項2】
請求項1記載のモバイル機器において、
前記制御部は、前記第1の遠心力の方向が前記平面と平行になるとき、前記第2の遠心力の方向が前記第1の遠心力の方向と略同一方向となるように前記第1および第2の振動モータを駆動する制御部とを備えることを特徴とするモバイル機器。
【請求項3】
請求項1記載のモバイル機器であって、
前記第1および第2の振動モータの停止時、前記第1の分銅と前記第2の分銅とを所定の位置関係を保った状態で停止させる停止手段を備え、且つ、
前記制御部は、前記第1および第2の振動モータの駆動時、前記第1の分銅と前記第2の分銅との回転方向が逆方向になるように、前記第1の振動モータと前記第2の振動モータとを同一回転速度を駆動することを特徴とするモバイル機器。
【請求項4】
請求項3記載のモバイル機器において、
前記第1および第2の分銅は、少なくともその一部が磁性体で構成され、
前記停止手段は、前記第1の振動モータの停止時に前記第1の分銅を所定位置で停止させる第1の磁石と、前記第2の振動モータの停止時に前記第2の分銅を所定位置で停止させる第2の磁石とを備えることを特徴とするモバイル機器。
【請求項5】
請求項1記載のモバイル機器において、
前記制御部は、前記第1の振動モータと前記第2の振動モータとの位相差が所定の位相差となり、且つ、前記第1の分銅と前記第2との回転方向が反対になるように前記第1および第2の振動モータを駆動することを特徴とするモバイル機器。
【請求項6】
請求項5記載のモバイル機器において、
前記制御部は、前記第1の振動モータと前記第2の振動モータとの位相差を検出する位相比較器と、該位相比較器の検出結果に基づいて前記第2の振動モータの回転速度を補正する補正回路とを備えることを特徴とするモバイル機器。
【請求項7】
請求項1記載のモバイル機器において、
前記第1の振動モータおよび前記第2の振動モータは、ステッピングモータから構成されることを特徴とするモバイル機器。
【請求項8】
請求項1記載のモバイル機器において、
前記第1の分銅と前記第2の分銅とは重量が異なり、
前記制御部は、前記第1の遠心力と、前記第2の遠心力とが略同一になり、且つ、前記第1の分銅と前記第2の分銅との回転方向が同一方向となるように前記第1および第2の振動モータを駆動することを特徴とするモバイル機器。
【請求項9】
請求項1乃至8の何れか1項記載のモバイル機器において、
タッチパネルと、
該タッチパネルと指との接触を検出する検出部とを備え、
前記制御部は、該検出部で接触が検出されたとき、前記第1および第2の振動モータの内の何れか一方を駆動することを特徴とするモバイル端末。
【請求項10】
第1のシャフトに第1の分銅が固定された第1の振動モータを筐体に実装すると共に、第2のシャフトに第2の分銅が固定された第2の振動モータを、前記第2のシャフトが前記第1のシャフトと略平行になるように前記筐体に実装し、前記第1の分銅が回転することにより発生する第1の遠心力の方向が前記第1および第2のシャフトを含む平面に対して垂直方向となるとき、前記第2の分銅が回転することにより発生する第2の遠心力の方向が前記平面に対して略反対方向になるように前記第1および第2の振動モータを駆動することを特徴とする振動モータ駆動方法。
【請求項1】
筐体と、
第1のシャフトに第1の分銅が固定され、前記筐体に実装された第1の振動モータと、
第2のシャフトに第2の分銅が固定され、前記第2のシャフトが前記第1のシャフトと略平行になるように前記筐体に実装された第2の振動モータと、
前記第1の分銅が回転することにより発生する第1の遠心力の方向が前記第1および第2のシャフトを含む平面に対して垂直方向となるとき、前記第2の分銅が回転することにより発生する第2の遠心力の方向が前記平面に対して略反対方向になるように前記第1および第2の振動モータを駆動する制御部とを備えることを特徴とするモバイル機器。
【請求項2】
請求項1記載のモバイル機器において、
前記制御部は、前記第1の遠心力の方向が前記平面と平行になるとき、前記第2の遠心力の方向が前記第1の遠心力の方向と略同一方向となるように前記第1および第2の振動モータを駆動する制御部とを備えることを特徴とするモバイル機器。
【請求項3】
請求項1記載のモバイル機器であって、
前記第1および第2の振動モータの停止時、前記第1の分銅と前記第2の分銅とを所定の位置関係を保った状態で停止させる停止手段を備え、且つ、
前記制御部は、前記第1および第2の振動モータの駆動時、前記第1の分銅と前記第2の分銅との回転方向が逆方向になるように、前記第1の振動モータと前記第2の振動モータとを同一回転速度を駆動することを特徴とするモバイル機器。
【請求項4】
請求項3記載のモバイル機器において、
前記第1および第2の分銅は、少なくともその一部が磁性体で構成され、
前記停止手段は、前記第1の振動モータの停止時に前記第1の分銅を所定位置で停止させる第1の磁石と、前記第2の振動モータの停止時に前記第2の分銅を所定位置で停止させる第2の磁石とを備えることを特徴とするモバイル機器。
【請求項5】
請求項1記載のモバイル機器において、
前記制御部は、前記第1の振動モータと前記第2の振動モータとの位相差が所定の位相差となり、且つ、前記第1の分銅と前記第2との回転方向が反対になるように前記第1および第2の振動モータを駆動することを特徴とするモバイル機器。
【請求項6】
請求項5記載のモバイル機器において、
前記制御部は、前記第1の振動モータと前記第2の振動モータとの位相差を検出する位相比較器と、該位相比較器の検出結果に基づいて前記第2の振動モータの回転速度を補正する補正回路とを備えることを特徴とするモバイル機器。
【請求項7】
請求項1記載のモバイル機器において、
前記第1の振動モータおよび前記第2の振動モータは、ステッピングモータから構成されることを特徴とするモバイル機器。
【請求項8】
請求項1記載のモバイル機器において、
前記第1の分銅と前記第2の分銅とは重量が異なり、
前記制御部は、前記第1の遠心力と、前記第2の遠心力とが略同一になり、且つ、前記第1の分銅と前記第2の分銅との回転方向が同一方向となるように前記第1および第2の振動モータを駆動することを特徴とするモバイル機器。
【請求項9】
請求項1乃至8の何れか1項記載のモバイル機器において、
タッチパネルと、
該タッチパネルと指との接触を検出する検出部とを備え、
前記制御部は、該検出部で接触が検出されたとき、前記第1および第2の振動モータの内の何れか一方を駆動することを特徴とするモバイル端末。
【請求項10】
第1のシャフトに第1の分銅が固定された第1の振動モータを筐体に実装すると共に、第2のシャフトに第2の分銅が固定された第2の振動モータを、前記第2のシャフトが前記第1のシャフトと略平行になるように前記筐体に実装し、前記第1の分銅が回転することにより発生する第1の遠心力の方向が前記第1および第2のシャフトを含む平面に対して垂直方向となるとき、前記第2の分銅が回転することにより発生する第2の遠心力の方向が前記平面に対して略反対方向になるように前記第1および第2の振動モータを駆動することを特徴とする振動モータ駆動方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−74405(P2013−74405A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−211084(P2011−211084)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(390010179)埼玉日本電気株式会社 (1,228)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(390010179)埼玉日本電気株式会社 (1,228)
【Fターム(参考)】
[ Back to top ]