
モバイル電子デバイスにおける正確な磁気コンパス
本明細書では、ホストデバイスの変化するソフトウェアモードおよびハードウェアモードに部分的に基づく非定常センサ誤差、特に非定常コンパス誤差の較正および補正のための方法および装置について説明する。各モードおよびモードの組合せによってセンサ中に誘導される非定常誤差は、1つまたは複数のホストデバイスの生産前試験中に判断され得る較正において判断される。較正結果はホストデバイスのソフトウェアおよび/またはハードウェアに組み込まれ得る。通常動作中に、アクティブモードまたはモードの組合せに部分的に基づいてセンサ測定値にセンサ補正が適用され得る。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は電子センサの分野に関する。詳細には、本発明は、電子センサの精度を向上させることの分野に関する。
【背景技術】
【0002】
電子および電気機械デバイスは電子センサをますます実装している。これらのデバイスは、自律的モニタリングおよび関係する機能的特徴をサポートするためにセンサによって与えられる情報に依拠する。たとえば、デバイスは、加速度、磁針路(magnetic heading)、光源レベル(light level)などをモニタするために電子センサを実装し得る。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許出願、整理番号第091412号
【発明の概要】
【発明が解決しようとする課題】
【0004】
そのようなセンサを組み込むコストが減少するにつれて、センサを実装するデバイスの数およびタイプは増加している。さらに、センサの品質が向上するにつれて、センサ出力の微小な変化をモニタするかまたは場合によってはそのような変化に応答するホストデバイスの能力が向上する。しかしながら、センサ実装の精度は、センサ自体の精度に依存するだけではなく、センサ精度を劣化させるように作用し得る様々な外力に依存する。外力の劣化効果を最小限に抑えながら、センサの精度が維持されなければならない。
【課題を解決するための手段】
【0005】
本明細書では、ホストデバイスの変化するソフトウェアモードおよびハードウェアモードに部分的に基づく非定常(non-constant)センサ誤差、特に非定常コンパス誤差の較正および補正のための方法および装置について説明する。各モードおよびモードの組合せによってセンサ中に誘導される非定常誤差は、1つまたは複数のホストデバイスの生産前試験(pre-production testing)中に判断され得る較正において判断される。較正結果はホストデバイスのソフトウェアおよび/またはハードウェアに組み込まれ得る。通常動作中に、アクティブモードまたはモードの組合せに部分的に基づいてセンサ測定値にセンサ補正が適用され得る。
【0006】
本発明の態様は動的センサ補正の方法を含む。本方法は、センサ出力値を判断するステップと、センサを有するホストデバイスの動的状態を判断するステップと、センサと動的状態とに基づいて較正値を判断するステップと、補正センサ出力値を生成するためにセンサ出力値に較正値を適用するステップとを含む。
【0007】
本発明の態様は動的センサ補正装置を含む。本装置は、ホストデバイスの動的状態を判断するように構成された状態モニタと、状態モニタに結合された補正モジュールであって、センサ出力値を判断し、ホストデバイスの状態に基づいて較正を判断し、較正とホストデバイスの状態とに少なくとも部分的に基づいて補正センサ出力値を出力するように構成された補正モジュールとを含む。
【0008】
本発明の態様は動的センサ補正装置を含む。本装置は、センサ出力値を判断するための手段と、センサを有するホストデバイスの動的状態を判断するための手段と、センサと動的状態とに基づいて較正値を判断するための手段と、補正センサ出力値を生成するためにセンサ出力値に較正値を適用するための手段とを含む。
【0009】
本発明の態様は、プロセッサによって実行されたときに動的センサ補正を実行する1つまたは複数のプロセッサ可読命令がその上に符号化された記憶媒体を含む。本命令は、センサ出力値を判断するための命令と、センサを有するホストデバイスの動的状態を判断するための命令と、センサと動的状態とに基づいて較正値を判断するための命令と、補正センサ出力値を生成するためにセンサ出力値に較正値を適用するための命令とを含む。
【0010】
本開示の実施形態の特徴、目的、および利点は、同様の要素が同様の数字をもつ図面とともに、以下に記載する詳細な説明を読めばより明らかになろう。
【図面の簡単な説明】
【0011】
【図1】モバイルデバイスの一実施形態の簡略機能ブロック図である。
【図2】状態表の一実施形態の簡略ブロック図である。
【図3】較正表の一実施形態の簡略ブロック図である。
【図4】電子磁気コンパスを補償するように構成された補正モジュールの一実施形態の簡略機能ブロック図である。
【図5】電子磁気コンパス出力など、センサ出力を動的に補正する一実施形態の簡略フローチャートである。
【発明を実施するための形態】
【0012】
本明細書では、動的に変化するセンサ環境中にセンサが実装されたとき、センサ出力の精度を維持するための方法および装置について説明する。広範囲のデバイス動作モードにわたってセンサ精度を維持するための動的較正および補正の方法および装置について本明細書で説明する。
【0013】
低減されたコスト、サイズ、および電力消費量を有し、それにより、モバイルデバイスなどのホストデバイスにセンサを追加することが可能になるセンサの一例は、2軸または3軸磁力計である。磁力計は、センサの近傍における磁界の方向および/または強度を測定するために使用され得るセンサのタイプである。磁力計の一例は、印加された磁界に比例する電圧を生成し、磁界の極性を感知するために使用され得る、固体ホール効果センサである。磁力計の別の例はフラックスゲート磁力計である。
【0014】
磁力計出力、および時々、加速度計出力のような他のセンサデータに基づいて、モバイルデバイスプロセッサは、地磁極への方向を表す磁気子午線に対するデバイス配向を指す磁針路を計算することができる。コンパス誤差をフィルタリングするために、利用可能であれば、ジャイロスコープデータ、または何らかの他の角速度センサからのデータなど、他のセンサデータも使用され得る。磁針路が判断された後、磁針路値は、磁気偏角表(magnetic declination table)の助けをかりて、地理的子午線に対する真針路(True Heading)値に変換され得る。
【0015】
モバイルデバイスは、位置ロケーションまたはナビゲーションアプリケーションにおいて支援するために、磁力計などの電子磁気コンパスを組み込み得る。一例では、モバイルデバイスは、ユーザがデバイスをあるオブジェクトにポイントさせ、デバイスソフトウェアが、判断されたまたは場合によっては知られているロケーションおよび時間と、針路と、地図データベースとを使用してそのオブジェクトを識別する、「ポイントアンドクリック」アプリケーションを実装し得る。
【0016】
モバイルデバイスは、たとえば、セルラー電話、GPS受信機、パーソナルナビゲーションデバイスなど、またはそれらの何らかの組合せであり得る。「モバイルデバイス」という用語は、これらの列挙した例示的なデバイスに限定されず、衛星信号受信、支援データ受信、および/または位置に関係する処理が当該デバイスで発生するかパーソナルナビゲーションデバイス(PND)で発生するかにかかわらず、短距離ワイヤレス、赤外線、ワイヤライン接続、または他の接続などによってPNDと通信するデバイスを少なくとも含むものとする。また、「モバイルデバイス」は、インターネット、Wi-Fi、または他のネットワークなどを介してサーバまたは他の通信デバイスとの通信が可能であり、衛星信号受信、支援データ受信、および/または位置に関係する処理が当該デバイスで発生するか、サーバで発生するか、またはネットワークに関連する別のデバイスで発生するかにかかわらず、ワイヤレス通信デバイス、コンピュータ、ラップトップなどを含むすべてのデバイスを含むものとする。上記のいかなる動作可能な組合せも「モバイルデバイス」と見なされる。
【0017】
コンパス精度についての限定的なファクタは、モバイルデバイスの内側および外側にある鉄物体の存在を含むことができる。鉄デバイスから生じる磁界は、地磁界上に重畳されると、一般に、磁力計の近傍において磁気子午線方向のひずみを生じる。これらのひずみはコンパス誤差の一因となる。
【0018】
センサ性能に対する外部物体の影響を緩和することはより困難であるが、内部の鉄鋼材の影響は、多くの場合、較正され得る。鉄鋼材は、センサの位置に対して位置が変化することができる機械構造において実施され得る。たとえば、モバイルデバイスは、クラムシェル(clamshell)スタイル電話などのヒンジ式構造、またはヒンジ式ディスプレイパネルを有し得る。他の可動の機械構造は、スライド可能なキーパッドカバーなどを含む。これらの可動の機械構造の各々は、センサ較正に影響を及ぼすか、あるいはセンサ較正に対する影響の効果を遮断するかまたは場合によっては目立たなくすることができる、鉄鋼材を有し得る。機械構造の影響も較正され得る。較正は、工場較正またはユーザ較正手順のうちの1つまたは複数であり得る。鉄物体が磁力計に対して定位置にとどまる限り、そのような静的較正は十分であり得る。
【0019】
しかしながら、磁力計またはコンパスの誤差の別の原因は、モバイルデバイス内の電流によって誘導される磁界である。電流の流れからの誘導磁界の影響は、磁界を誘導する電流線から物理的に十分遠くに磁力計を配置することによって緩和され得る。残念ながら、モバイルデバイスの物理的サイズが縮小するにつれて、磁界を誘導する電流線から物理的に遠くにあるロケーションに磁力計を格納する能力は制限される。さらに、デバイス設計者の観点から、コンパス性能は、モバイルデバイス内のワイヤレスモデム、GPS受信機、フォトカメラまたはディスプレイの性能に対して二次的であるかまたは場合によっては優先度がより低いことがある。したがって、磁力計または他のセンサは、しばしば、結局、最適とは言えないロケーションに配置されることになる。磁力計の場合、最適とは言えないロケーションは、スピーカー、バッテリー、スイッチモード電源、または何らかの他の高電流部品の近くのロケーションであり得る。
【0020】
電流によって誘導された磁界から生じる磁力計誤差は較正され得る。ただし、較正は、電流が一定のままである時間の間、有効である。一般に、モバイルデバイス内の電流は時間とともに変動するかまたは間欠的であるので、従来の較正方法を使用して電流の影響を較正することが難しくなる。旧来、変化するイベントおよびプロセスによって生じる変動するコンパス誤差は、ユーザが受け入れるしかなかった誤差を生じた。
【0021】
本明細書では、変化するソフトウェアおよびハードウェアデバイスのモードまたは状態によって生じる非定常コンパス誤差の動的較正および補正のための方法および装置について説明する。重要なコンパス誤差の一因となるモードまたはデバイス状態が識別され得る。これらのモードのいくつかのまたはあらゆる組合せによって誘導される誤差は、1つまたは複数のデバイスの生産前試験中に較正され得、較正結果がモバイルデバイスに組み込まれ得る。モバイルデバイスの生産中に、同様の構成を有するモバイルデバイスに対して較正表を使用し、それによって、各生産デバイスに対して個別の較正を実行する必要性を最小限に抑えることができる。動作中、モードまたはモードの組合せに応じて、コンパス測定値に補正が適用される。
【0022】
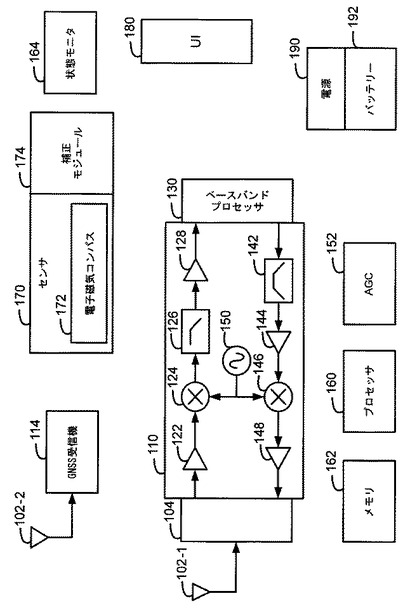
図1は、モバイルデバイス100の一実施形態の簡略機能ブロック図である。図1のモバイルデバイス100は、位置ロケーション対応ワイヤレス通信デバイスとして示されている。しかしながら、モバイルデバイス100はそのような構成に限定されない。
【0023】
モバイルデバイス100は、ベースバンドプロセッサ130に結合されたワイヤレス通信トランシーバ110と、Global Navigation Satellite System(GNSS)受信機114と、センサ170とを含む。センサ170のうちの1つまたは複数の出力は、補正モジュール174を使用して補償されるかまたは場合によっては補正され得る。状態モニタ164は、モバイルデバイス100の状態またはモードをモニタし、状態またはモード情報を補正モジュール174に供給することができる。
【0024】
ワイヤレス通信トランシーバ110の様々な段の利得は、自動利得制御(AGC)モジュール152を使用して制御され得る。動的センサ較正および補正に関連する1つまたは複数の機能またはプロセスを含む、モバイルデバイス100内の1つまたは複数の機能またはプロセスは、メモリ162中に符号化された1つまたは複数のソフトウェア命令を実行するプロセッサ160を使用して制御されるかまたは場合によっては実装され得る。
【0025】
モバイルデバイス100は、電源190において処理されるかまたは場合によっては調整されるバッテリー192で動作し得る。ユーザインターフェース180を使用してローカル入力および出力が実装される。
【0026】
ワイヤレス通信トランシーバ110は受信機および送信機を含むことができる。受信機および送信機は、たとえば、ワイヤレス通信トランシーバ110による同時送受信を可能にするデュプレクサ104を介して、共通の通信アンテナ102-1にインターフェースすることができる。時分割多元接続(TDMA)トランシーバ110構成では、デュプレクサ104は、送信機または受信機のうちの一方をアンテナ102-1に選択的に結合するために送信/受信(T/R)スイッチと置き換えられ得る。
【0027】
ワイヤレス通信トランシーバ110内の受信機は、デュプレクサ104を介してアンテナ信号を受信する低雑音増幅器122など、増幅器を含むことができる。LNA122の出力は、受信信号をそれのRF帯域からベースバンド周波数に直接変換するように構成された受信ミキサ124に結合される。受信ミキサ124は、受信RF中心周波数に基づく周波数に調整された局部発振器150によって駆動され得る。
【0028】
受信ミキサ124からのベースバンド出力は、不要なミキサ積(mixer product)を除去し、帯域外信号をフィルタ処理するように構成されたベースバンドフィルタ126に結合される。ベースバンドフィルタ126の出力は、増幅器128に結合され、その後、ベースバンドプロセッサ130の受信信号入力に結合される。
【0029】
ワイヤレス通信トランシーバ110内の送信機は、受信機に対して補足的な方法で動作する。ベースバンドプロセッサ130の送信出力において送信信号が生成される。ワイヤレス通信トランシーバ110の一例では、ベースバンドプロセッサ130からの送信出力は、送信/受信周波数オフセットに基づいて判断された中間周波数にあり得る。別の例では、ベースバンドプロセッサ130からの送信出力はベースバンドにあり得る。
【0030】
ベースバンドプロセッサ130からの出力は、送信信号帯域幅の外部の信号を減衰させるように構成され得るフィルタ142に結合される。フィルタ142からの出力は送信増幅器144に結合される。送信増幅器144の出力は、局部発振器150からの信号と併せて送信信号をそれの所望の動作周波数に周波数変換するように構成された送信ミキサ146に結合される。
【0031】
送信ミキサ146からの出力は、送信信号を所望のRF電力レベルに増幅するように構成された高出力増幅器148に結合される。高出力増幅器148からの出力は、送信のためにデュプレクサ104を介してアンテナ102-1に結合される。
【0032】
自動利得制御AGCモジュール152は、ワイヤレス通信トランシーバ110の送信機および受信機において利得を制御するように構成され得、ベースバンドプロセッサ130において1つまたは複数の利得を制御するように構成され得る。AGCモジュール152は、様々な利得を制御するために、たとえば、1つまたは複数の検出器、増幅器、およびトランジスタ、電圧調整器、または相互コンダクタンスデバイスを含むことができる。いくつかの実施形態では、AGCモジュール152の機能の一部は、プロセッサ160によって実行されるメモリ中で符号化されたプロセッサ可読命令を使用して実行され得る。
【0033】
AGCモジュール152は、利得を制御するために、たとえば、減衰値、電圧、電流など、またはそれらの何らかの組合せを制御することができる。たとえば、AGCモジュール152は、受信機においてLNA122を選択的に有効または無効にし得、増幅器への電流バイアスを調整することによって受信増幅器128の利得を選択的に制御し得る。
【0034】
AGCモジュール152は、たとえば、高出力増幅器148ならびに送信増幅器144の電流または電圧を制御することによって、送信機において利得を制御し得る。AGCモジュール152は、実質的に連続的に、あるいは所定数の段または利得量子化を介して利得を制御するように構成され得る。AGCモジュール152は、いくつかの増幅器、たとえば144を連続的な利得範囲にわたって制御しながら、他の増幅器、たとえば148を離散的な利得ステップで制御することができる。
【0035】
GNSS受信機114は、たとえば、Global Positioning System(GPS)受信機であることができ、あるいはロシアのGlonassシステム、欧州のGalileoシステム、または衛星システムの組合せからの衛星を使用する任意のシステムなど、1つまたは複数の他の衛星測位システムからの信号に作用するように構成され得る。GNSS受信機114は、アンテナ102-2を介して測位衛星ビークルから信号を受信し、受信機の位置フィックスを計算することができる。位置フィックスは、モバイルデバイス100においてリモートで実行され得、あるいは、モバイルデバイス100がそれらと通信していることがあり得る1つまたは複数のリモートプロセッサ、サーバ、またはエンティティと併せて実行され得る。
【0036】
1つまたは複数のセンサ170は、モバイルデバイス100に関連する位置、配向、針路、加速度、または他のパラメータを判断するように構成され得る。一例では、センサ170は、モバイルデバイス100の針路を判断するために使用され得る磁力計172を含む。
【0037】
ユーザインターフェース180は、ユーザディスプレイ、キーパッド、マイクロフォン、ラウドスピーカーなど、またはそれらの何らかの組合せを含むことができる。ユーザインターフェースはまた、通信または他の電子データおよび信号の交換のための1つまたは複数のポートを含むことができる。
【0038】
状態モニタ164は、1つまたは複数のセンサ170の精度に影響を及ぼすものと判断される、モバイルデバイス内の様々なハードウェアおよびソフトウェアの1つまたは複数の状態またはモードをモニタするように構成される。
【0039】
センサ精度に影響を及ぼし得る任意の数の異なるイベント、動作状態、またはモードがある。状態は、電気的であるか、または機械的であるか、またはそれらの組合せであり得る。磁力計172の例では、電流の流れの変動が、磁力計172によって示される針路の精度に影響を及ぼす磁界を誘導することができる。電子デバイスにおいて電流変化を生じるイベントの例には、オフまたはオンにされ得る、ユーザインターフェース180におけるディスプレイバックライトがある。さらに、バックライトがオンにされるとき、低、中、高のように、それぞれバッテリー192から異なる電流を必要とするいくつかのバックライトレベルがあり得る。センサ精度への各要因の影響は、時間および温度にわたって一貫しているか、または時間、温度などに基づいて変動し得る。電流の流れの変化を生じる他のイベントまたはモードには、アクティブにされると一般に電流スパイクを生じる、リンガー、バイブレータ、またはビーパーがある。機械的状態の例には、ヒンジ式カバー、スライド可能なカバーなどがある。
【0040】
バッテリー192が充電されているとき、モバイルデバイス100中の電流の流れは、バッテリー192が消耗しているかまたは場合によっては充電されていないときとは異なる。バッテリー192の充電の場合、電流が変動するだけでなく、バッテリー192が充電されているかどうかに基づいて電流の方向も変動し得る。
【0041】
ワイヤレストランシーバ(モデム)またはフォトカメラのアクティブ化など、モバイルデバイス100内のハードウェアのどんなモード変化も電流分布に影響を及ぼす。ワイヤレス通信トランシーバ110は、送信機と受信機とを独立してアクティブにし得る。同様に、GNSS受信機114は、選択的にアクティブまたは非アクティブにされ得る。
【0042】
プロセッサ160の計算負荷が低いとき、電力管理能力をもつプロセッサのクロックレートは低下され得る。クロックレートを低減すると、一般に、電力消費量および電流がそれぞれ低減する。たとえば、電力最適化を用いるGPSデバイスでは、GPS位置を計算し、地図を再描画するために広範な計算が必要とされるとき、処理クロックレートは通常、1秒ごとに1回ピークに達する。ピーク計算負荷の間、誘導される磁力計誤差もピークに達し得る。
【0043】
強いGPS信号が利用可能であるとき、GNSS受信機114は低デューティサイクルモードに入れられ得、GNSS受信機114の一部は、たとえば毎秒500ms間停止する。周期的停止は、GNSS受信機114によって消費される電流において同様の周期サイクルを生じる。
【0044】
電流の流れに影響を及ぼすか、または磁界に機械的に影響を及ぼし、それによって誘導磁界に影響を及ぼし、磁力計172などの磁気センサに影響を及ぼすタイプの事象の例として、様々な状態、モード、プロセス、およびイベントを与える。これらの例は網羅的なリストではなく、本明細書では概して状態と呼ぶ、センサ精度に影響を及ぼす多くの他のハードウェアまたはソフトウェア状態、モード、またはイベントがあり得る。
【0045】
様々な状態は、論理的に相互排他的であるか、独立であるか、または依存し得ることがわかるであろう。たとえば、アクティブにされたGNSS受信機は、非アクティブにされたGNSS受信機とは論理的に相互排他的である。同様に、GNSS受信機状態は、一般に、ディスプレイバックライト状態とは論理的に独立している。
【0046】
対照的に、いくつかの状態は論理的に依存し得る。たとえば、通信受信機AGC状態は通信受信機アクティブ化状態に論理的に依存する。通信受信機が作動してない場合、受信機AGC状態の値は有意性を有しない。
【0047】
様々な状態間の論理関係は、様々な電流とそれらの対応する誘導磁界との間の相互作用を判断するのに役立ち得る。ただし、状態間の論理関係は、モバイルデバイス100内の電流の流れの関係に厳密に対応しないことがある。たとえば、いくつかの独立状態がモバイルデバイス100内のハードウェアを共有し得、両方の状態が存在する場合、一方のみの状態が存在するときに対してモバイルデバイス100内の電流の流れが増加しないことがある。たとえば、GNSS受信機114は、ワイヤレス通信トランシーバ110によっても使用される中間データおよび情報をベースバンドプロセッサ130に提供し得る。アクティブGNSS測位状態は、作動しているベースバンドプロセッサ130に対応し得る。GNSS測位状態とワイヤレス通信状態とは論理的に独立であるが、ワイヤレス通信状態のアクティブ化は、ベースバンドプロセッサ130による追加の電流消費を生じないことがある。
【0048】
したがって、補正モジュール174によってセンサ170からの出力に与えられる補償は、一般に、単に個々の各状態の補償の重ね合わせではない。代わりに、補正モジュール174は、状態モニタ164から状態を判断し、様々な状態間の相互関係を考慮に入れる累積補正をセンサ170の各々に適用することができる。
【0049】
動的センサ補償および補正を与えるために、顕著なセンサ誤差を生じるモバイルデバイス100中のハードウェアおよびソフトウェアのプロセスおよびモードを含む状態が識別される。状態モニタ164は、識別された状態の各々をモニタするように構成される。状態モニタ164は、ソフトウェア状態などの状態を直接モニタするように構成され得、あるいは状態を間接的にモニタするかまたは場合によっては推論するように構成され得る。
【0050】
状態および状態の組合せごとに、センサは較正される。たとえば、磁力計または電子コンパスを較正するプロセスは、状態および状態の組合せの各々について、コンパス誤差を較正または場合によっては測定することを含むことができる。較正は、必要であれば、各磁力計軸について別々に行われ得る。
【0051】
いくつかの状態は、過渡的(transitory)であり得、短い時間期間の間のみアクティブであり得る。とはいえ、これらの短い遷移状態はセンサ精度に顕著な影響を及ぼし得る。たとえば、バッテリー充電器が初めてモバイルデバイス100に接続されたとき、モバイルデバイス100内の電流の流れに著しい変化があり得る。電流の流れがバッテリー192外からバッテリー192内へと変化するだけでなく、最初のバッテリー充電に関連する突入電流(in-rush current)があり得る。電流の流れの変化ならびに突入電流は電子コンパス精度に顕著な影響を及ぼし得る。しかしながら、この顕著な影響は極めて短期間のものであり得る。
【0052】
そのような遷移状態の過渡的性質は、誘導されたセンサ誤差を正確に測定し、較正することを困難にし得る。電話バイブレータは、電子磁気コンパスの精度に悪影響を及ぼすが、一般に、短い規定された時間期間の間のみ動作するデバイスの一例である。これらの短い遷移状態について、補正モジュール174は、センサ示度(reading)を廃棄し、示度を雑音としてマークし、または場合によっては過渡的影響を補償するように構成され得る。たとえば、電子コンパスにおいて、補正モジュールは、過渡的状態の発現に対応する時間に表示された針路をフリーズさせ得る。補正モジュール174は、たとえば、遷移状態中にセンサ出力のバッファされたまたは登録された値を与えることができる。
【0053】
補正モジュール174は、補正センサ出力に補正値を加算するように構成され得る。別の実施形態では、補正モジュールの機能の一部または全部は、メモリ162などのプロセッサ可読ストレージデバイス上に符号化された1つまたは複数の命令および情報として実施され得る。1つまたは複数の命令および情報は、プロセッサ160によってアクセスされ、実行されたとき、センサ補正を実装することができる。一実施形態では、モバイルデバイス100のソフトウェア内にリアルタイムコンパス補正アルゴリズムが実装される。このアルゴリズムは、プロセッサ160によって実行されたとき、デバイス状態およびそれらの組合せを識別し、較正結果に基づいて磁力計示度に適切な補正を導入することができる。
【0054】
補正モジュール174は、静的較正表など、既存の補正表を増補するために利用され得る。他の実施形態では、補正モジュール174は、センサを較正するために利用され得る。センサに対する較正表は、工場較正、ユーザ開始較正、または自動較正の結果として開始および生成され得る。
【0055】
工場較正は、デバイスが初めて構築されたとき、プロビジョニングされたとき、または使用されたときに実行されるかまたは場合によってはロードされ得る。工場較正は、個々のデバイスごとに実行され得るが、同様のデバイスのサンプルセットから実行された較正に基づいてロードされる可能性がより高い。
【0056】
ユーザ較正は、手動で、および一般的にはデバイスに対してローカルに開始され得る較正プロセスを表す。ユーザ較正は、所定のセットのキー押下など、所定のセットのアクション時に、あるいはユーザがデバイスをいくつかの静的配向に連続的に配置すること、または特定の所定の方法でデバイスを回転させることなど、いくつかの操作を実行したときに開始し得る。
【0057】
自動較正は、ユーザ関与なしにバックグラウンドで行われ得る。自動較正は、寿命、イベント、または寿命とイベントとの組合せに基づいて開始し得る。たとえば、自動較正は、ホストデバイスが所望の配向に配置されるかまたは一定の方法で移動されたときに開始し得る。自動較正については、そのすべてが参照により本明細書に組み込まれる、本明細書とともに出願され、本開示と同じ譲受人を有するChristopher Brunnerによる「Calibrating Multi-Dimensional Sensor for Offset, Sensitivity, and Non-Orthogonality」と題する米国特許出願、整理番号第091412号において説明されている。
【0058】
ユーザ較正および自動較正は、工場較正を増補するかまたは工場較正の代わりに使用するために使用され得る。たとえば、工場較正においてすべてのパラメータまたは状態が較正されるわけではないことがあり、工場較正はデバイスのサンプリングに基づき得るが、各一意のデバイスはそれ自体の特性を有し得る。たとえば、バッテリーは一般にそれら自体の磁性を有する。同様に、工場較正のパラメータは、実際のデバイス条件とは異なる条件で較正されていることがある。たとえば、工場較正は、動作温度範囲全体に及ばないことがあるか、または比較的強い地磁界をもつエリアにおいて実行され得、次いで、デバイスは水平磁界強度がはるかに弱いロケーションにおいて使用される。
【0059】
工場較正が破損し、損失し、または場合によっては無効になった場合、ユーザ較正および自動較正は特に有用であり得る。たとえば、ホストデバイスが不注意に磁化され、したがって工場較正が無効になることがある。たとえば、ホストデバイスが落下したために、センサがそれのマウント上でシフトされるか、またはマウントボードがホストデバイスハウジングに対してシフトし得るので、工場較正が不十分になることがある。
【0060】
すべてのタイプの較正は、一般に、モニタされ得るホストデバイス状態を相殺する。すなわち、ある状態のデバイスに対してユーザ較正または自動較正が行われた場合、較正結果は、この状態に対応するものとして記録され、デバイスが将来この状態になったときに適用されなければならない。効果的にモニタされるが制御することが困難であり得る特定の状態の一例は、デバイス温度である。
【0061】
同じ状態における同じパラメータが、可能な較正(工場、ユーザ、自動車)のうちの2つ以上を使用して較正された場合、結果は、各較正品質および時期(age)に応じて、いくつかの優先度が1つの較正タイプまたは較正時期に与えられて、重みを用いて平均化され得る。
【0062】
図2は、状態表200の一実施形態の簡略ブロック図である。状態表200は、たとえば、図1の状態モニタ164によって維持されるかまたは場合によっては導出され得る。状態モニタは、周期的ベースで、イベントベースで、またはそれらの何らかの組合せで状態表を更新し得る。
【0063】
図2の状態表200は、状態モニタによってモニタされ得る状態のタイプの一例である。状態表200に示す状態の数は、簡潔のために限定されており、モニタされ得る状態のタイプの網羅的なリスティングであるものではない。前述のように、「状態」という用語は、本明細書では、ハードウェアで実装されるか、ソフトウェアで実装されるか、またはそれらの組合せで実装されるにかかわらず、状態、モード、またはプロセスを指すために使用される。さらに、状態表200の状態は遷移状態を含み得る。遷移状態は、たとえば、状態表200における1つの状態から別の状態への遷移を示すことができる。
【0064】
一実施形態では、状態表200は、メモリ中に実装され得、1つまたは複数のプロセッサによって書き込まれ得る。たとえば、ソフトウェア動作を制御する各プロセッサは、状態の変化時に状態表を更新し得る。さらに、1つまたは複数のプロセッサは、モバイルデバイス内のハードウェア状態をモニタ、サンプリング、または場合によってはポーリングし、ハードウェアモニタリングに従って状態表200を更新するように構成され得る。いくつかの事例において、プロセッサ以外のハードウェアは、状態表200に直接アクセスし、状態表200を編集する能力を有し得る。
【0065】
別の実施形態では、状態表200はハードウェアで実装され得る。たとえば、状態表中の各ビットは、検出器、電流動作スイッチ、電圧モニタなど、またはそれらの何らかの組合せなど、ハードウェアモニタに対応することができる。電流モニタは、たとえば、図1の高出力増幅器またはベースバンド増幅器など、モジュールまたは増幅器に印加されたバイアス電流をモニタし、そのバイアス電流に基づいて増幅器の状態を判断し、報告することができる。電流モニタ出力は、状態を状態表200中のエントリとして直接報告するように構成され得る。同様に、電圧モニタは、モジュールまたはデバイスが電圧の印加を通してアクティブにされる、デバイスまたはモジュールのバイアス電圧に基づいて状態をモニタし、報告し得る。
【0066】
さらに他の実施形態は、状態表200を実装し、更新するためにソフトウェアとハードウェアの組合せを利用し得る。ソフトウェア上で動作するプロセッサは、ソフトウェア状態をモニタし、報告し得、ハードウェア状態およびハードウェアモニタの一部は、他のハードウェア状態をモニタし、報告するために使用され得る。いくつかの実施形態では、プロセッサで実行されるソフトウェアは、状態をモニタし、報告するために、ハードウェアと連携して動作し得る。
【0067】
たとえば、機械的特徴の状態は、直接モニタされるか、またはソフトウェアによってモニタされ得る。ソフトウェアは、センサ、スイッチ、検出器などを使用して1つまたは複数の機械的特徴の状態をモニタし得る。たとえば、センサまたはスイッチを使用して折り畳みカバーまたはスライディングカバーの位置を示し得る。代替的に、ソフトウェアは、1つまたは複数の関係するパラメータに基づいて機械的特徴の状態を推論、推測、または場合によっては間接的に判断し得る。たとえば、ソフトウェアは、キー押下の検出時にキーパッドカバーが開状態にあることを推論し得る。同様に、バックライトがオンのとき、ディスプレイカバーが開位置にあることが推測され得る。他の機械的特徴は、同様の様式で感知されるかまたは場合によっては判断され得る。
【0068】
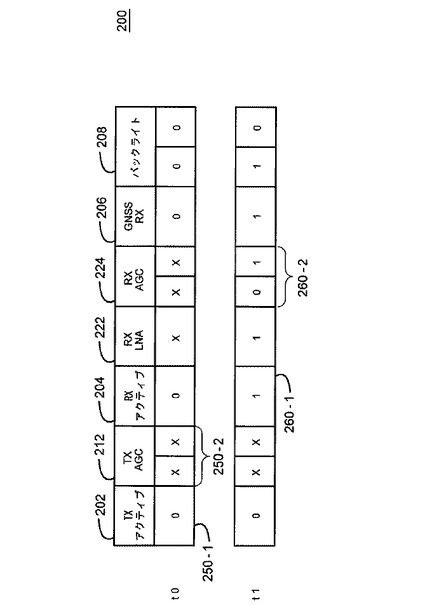
図2の状態表200の例は、いくつかの独立状態ならびにいくつかの依存状態を示している。状態表200は、送信機アクティブ202と、受信機アクティブ204と、GNSS受信機アクティブ206と、バックライトアクティブ208との状態エントリを含む。状態表200はまた、いくつかの依存状態エントリを含む。これらは、その有意性が送信機アクティブ202状態に依存する2ビットの送信機AGC状態212を含む。同様に、受信機LNA状態222と、2ビットの受信機AGC状態224とは、受信機アクティブ204の状態に依存する。
【0069】
送信機AGC212および受信機AGC224などの依存状態の値は、それらが依存する状態の状態に基づいてのみ有意であり得る。たとえば、時間t0において、送信機アクティブ状態ビット250-1は送信機がアクティブでないことを示しているので、送信機AGC状態212のステータスビット250-2は「無関係(don't care)」状態に設定され得る。「無関係」ステータスは、AGC状態212のすべての可能な組合せについて、モバイルデバイスの状態が本質的に同じであることを示す。
【0070】
後の時間t1において、状態表200中のステータスビットは、モバイルデバイス状態の変化を示すために変化する。状態表は、イベントなど、またはそれらの何らかの組合せに基づいて周期的に更新し得る。時間t1において、受信機アクティブビット260-1は受信機がアクティブであることを示しており、したがって、対応する受信機AGCビット260-2の状態は、センサ較正に影響を及ぼすモバイルデバイスの状態を有効に示す。
【0071】
図2の状態表200の例はアクティブハイ論理を使用しているが、本発明はいかなる特定の論理規約にも限定されない。実際、状態表200中のエントリはバイナリである必要はなく、何らかの他の指示でもよく、その指示は数字である必要さえない。
【0072】
上記のように、様々な状態の論理的独立性は、必ずしもセンサに対する影響の独立性と等価にならない。したがって、状態表200の異なるインスタンスは様々な状態の可能な組合せを示すことができ、状態の異なる組合せの各々は一意のセンサ補正に対応し得る。
【0073】
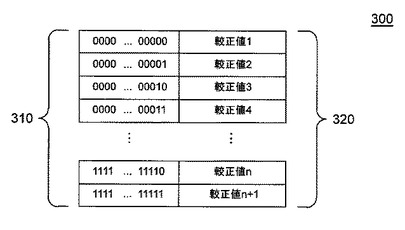
図3は、較正表の一実施形態の簡略ブロック図である。較正表300は、たとえば、図1の補正モジュール174中に実装され得る。較正表300は状態値エントリ310ならびに較正値320を含む。図3の較正表において、各デバイス状態値は、対応する較正値にマッピングし得、較正値は、補正係数、補償値、または較正オフセットとして実装され得る。
【0074】
追加のコンパス誤差を生じ得る多数のデバイス状態および状態の複数の組合せは、較正表を準備する作業を過度に複雑に見えるようにするようである。しかしながら、誤差は一般に所与のモデルのすべてのデバイスについて同様であるので、実際の較正(誤差測定)は、生産前試験中などに単一のデバイスまたはデバイスのサンプル上で行われ得る。較正結果は、同じモデルのすべてのデバイスのための共通の較正表に組み込まれ得る。
【0075】
較正表300は較正値320に直接マッピングする状態値エントリ310を示しているが、マッピングは直接的である必要はない。状態値エントリ310を対応する較正値320にマッピングする他の方法があり、本発明はいかなる特定のマッピング方法にも限定されない。たとえば、各状態値エントリ310はメモリ中のアドレスに関連付けられ得、そのメモリ中のアドレスが対応する較正値320を記憶することができる。同様に、各状態値エントリ310は、対応する較正値320を保持するアドレスをポイントするポインタに関連付けられ得る。
【0076】
モバイルデバイスは、状態モニタにとって利用可能でない状態または状態の組合せに入ることが可能であることに留意されたい。たとえば、ディスプレイ上のピクチャのピクセルの照度が磁力計に影響を及ぼし得、スクリーン状態の数は、状態モニタにおいて追跡されるにはあまりに大きくなり得る。別の例として、磁力計に影響を及ぼすデバイスの状態は、ソフトウェア制限により状態モニタには利用可能にされ得ない。
【0077】
したがって、状態モニタによって報告される状態または状態の組合せに対して複数の有効な較正値があり得る。そうである場合、状態モニタによって報告される同じ状態に対して、たとえば、自動較正によって取得された複数の較正値が記憶され得る。
【0078】
状態モニタがすべての関係する状態を追跡することができない場合、状態モニタによって報告される状態または状態の組合せに関連する複数の較正値から、どの較正セットが最も良く適合するかに基づいて較正値が選択され得る。適合基準は、3D磁力計の較正された磁力計サンプルが球上に配置されていることを活用し得る。
【0079】
状態の組合せに起因する誤差の補正を可能にするために、状態値エントリ310によって具備される状態の異なる組合せの各々は較正値320に対応し、組合せのための補正は、個々の各状態の補正値の合計とは異なり得る。いくつかの状態値は同じ較正値にマッピングし得る。たとえば、依存状態の状態値のいくつかの組合せは、それらが依存する独立状態の状態に応じて同じ較正値にマッピングし得る。
【0080】
較正表300はまた、状態値エントリ310ごとにただ1つの較正値を示している。しかしながら、他の実施形態では、1つまたは複数の追加のパラメータが較正値に影響を及ぼし得る。たとえば、電子磁気コンパスなどのセンサのために戻される較正値は、針路がある象限(quadrant)に部分的に依存し得る。さらに、センサのために戻される較正値は温度または何らかの他のパラメータに依存し得る。いくつかの事例において、これらの追加のパラメータの各々は追加の状態値としてモニタされ得る。代替的に、追加の1つまたは複数のパラメータは、ホストデバイスの状態とは排他的であり得る。追加のパラメータが状態値に加えられる場合、較正表300は、状態エントリごとにパラメータ値の範囲の較正値を記憶するように構成され得る。代替的に、較正表300は、パラメータに基づき、較正表300から戻された較正値に適用される、1つまたは複数の追加の補正値を記憶することができる。
【0081】
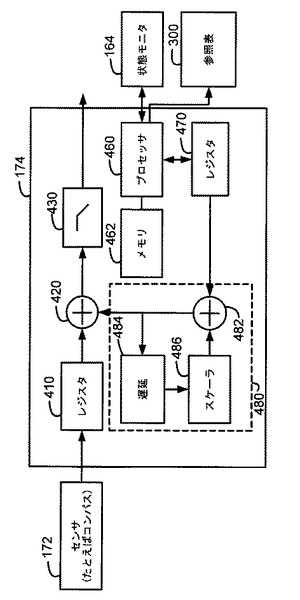
図4は、図4では電子磁気コンパス172として示すセンサを補償するように構成された補正モジュール174の一実施形態の簡略機能ブロック図である。電子コンパス172は、磁界に基づいて針路を感知し、針路を示す信号を出力する。補正モジュール174は、センサ出力を受信し、状態モニタ164から状態値を受信し、較正値を判断する。補正モジュール174は、補正センサ出力を生成するためにセンサ出力に較正値を加算する。状態モニタ164が1つまたは複数の過渡的状態の存在を示す場合、補正モジュール174は、たとえば、過渡的状態の持続時間の間、前の補正センサ出力を供給することによって補正センサ出力をフリーズさせ得る。
【0082】
図4の実施形態では、補正モジュール174は、センサ出力を受信するように構成されたレジスタ410を含む。レジスタ410は、たとえば、サンプルアンドホールドモジュール、RSラッチ、Dフリップフロップ、または何らかの他のストレージデバイスであり得る。レジスタ410のタイプは、たとえば、電子磁気コンパス172などのセンサがアナログ出力を供給するかまたはデジタル出力を供給するかに依存することができる。
【0083】
レジスタ410の出力は第1の加算器420の第1の入力に結合される。較正値は加算器420の第2の入力に結合される。加算器420は、補正センサ出力を生成するためにセンサ出力に較正値を加算するように構成される。補正センサ出力は、加算器420の出力から低域フィルタなどのフィルタ430に結合され得る。低域フィルタ430は、補正センサ出力から雑音を除去するように構成され得る。さらに、低域フィルタ430は、センサ応答時間を抑えるかまたは場合によっては遅くするように構成され得る。低域フィルタ430の出力は補正センサ出力である。いくつかの実施形態では、低域フィルタ430は省略され、第1の加算器420が補正センサ出力を供給する。
【0084】
補正モジュール174は、状態モニタ164とともに較正値を判断する。補正モジュール174はまた、状態モニタ164の出力に結合されるか、または場合によっては状態表にアクセスできる。
【0085】
状態モニタがすべての関係する状態を追跡することができない場合、状態モニタによって報告される状態または状態の組合せに関連する複数の較正値から、どの較正セットが最も良く適合するかに基づいて較正値が選択され得る。適合基準は、3D磁力計の較正された磁力計サンプルが球上に配置されていることを活用し得る。
【0086】
一実施形態では、補正モジュール174は、メモリ462に記憶された命令に従って動作するプロセッサ460を含む。プロセッサ460は、状態モニタ164からの状態表値にアクセスするかまたは場合によってはその状態表値を受信する。
【0087】
プロセッサ460は、状態値を利用して、図3の較正表300などの参照表にアクセスする。較正表300は、補正モジュール174とは別々のものとして示されている。しかしながら、いくつかの実施形態では、較正表300は補正モジュール174の一部であり得る。プロセッサ460は、状態値に少なくとも部分的に基づいて較正表300から較正値を取り出す。プロセッサ460は較正レジスタ470に較正値を書き込む。
【0088】
較正レジスタ470は較正値を較正値フィルタ480に供給する。較正値フィルタ480は、較正値中に存在する雑音をフィルタ処理するように構成され、較正値の応答時間を抑えるかまたは場合によっては制御するように構成され得る。図4では特定の構造の較正フィルタ480を示しているが、補正モジュールは、いかなる特定のフィルタ構造にも限定されず、較正値フィルタ480さえ省略し得る。
【0089】
較正値フィルタ480は、レジスタ470から較正値を受信するように構成された第1の入力を有する第2の加算器482を含む。第2の加算器482の出力は、第1の加算器420に結合される較正値を表す。
【0090】
第2の加算器482の出力はまた、遅延モジュール484の入力に結合される。遅延モジュール484の出力は信号スケーラ486に結合される。信号スケーラ486は、遅延された較正値をスケーリングし、そのスケーリングされた値を第2の加算器482の第2の入力に結合する。
【0091】
状態モニタが過渡(transient)状態または場合によっては過渡的状態を示す状況では、プロセッサ460は、処理されているセンサ値をフリーズさせることができる。たとえば、プロセッサは、過渡的状態の発生より前に存在していた値を保持するために、レジスタ410と較正レジスタ470とをフリーズさせることができる。
【0092】
状態モニタ164は状態値を常に更新しているので、補正モジュール174は、モバイルデバイスの状態に基づいてセンサ出力を動的に補正することが可能である。このようにして、センサ出力はより正確になる。
【0093】
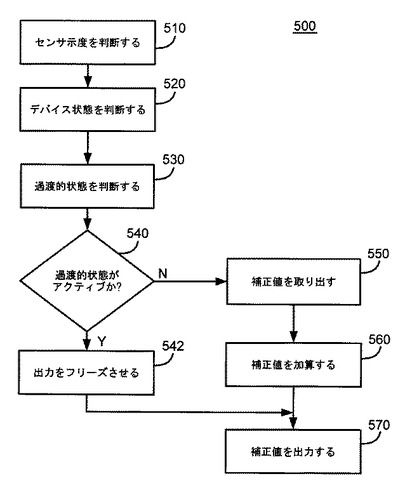
図5は、電子磁気コンパス出力などのセンサ出力を動的に補正する方法500の一実施形態の簡略フローチャートである。方法500は、図1のモバイルデバイスによって実装され得、特に、状態モニタおよび較正表と併せて動作する図4の補正モジュールによって実装され得る。
【0094】
方法500はブロック510において開始し、補正モジュールはセンサ出力を受信する。たとえば、補正モジュールは、電子磁気コンパスから針路示度を受信し得る。補正モジュールは、センサ出力値を登録するかまたは場合によっては記憶し得る。
【0095】
補正モジュールは、ブロック520に進み、デバイス状態を判断する。一実施形態では、状態モニタは、センサ精度に影響を及ぼすホストデバイスのセンサ状態を追跡する。状態モニタは、異なるセンサの異なるデバイス状態を追跡し得る。電子磁気コンパスの場合、電流の流れによって誘導された磁界がコンパス示度の精度に影響を及ぼし得るので、状態モニタは、デバイス内の電流の流れの変化に関係するデバイス状態を追跡し得る。
【0096】
補正モジュールは、状態値にアクセスし、その状態値を読み込み得、または状態モニタが状態値を補正モジュールに供給することができる。補正モジュールが現在のデバイス状態を判断すると、補正モジュールはブロック530に進む。補正モジュールは、過渡的状態の存在を判断するために状態値を検査し、ここで、過渡的状態は、一般に、その過渡的状態中のセンサの較正が効率的でないかまたは実現可能でないほど短い時間の有効なままである状態を指す。たとえば、過渡的状態の結果として生成された電流スパイクがセンサの出力信号帯域幅に関して短時間の間存在し得、したがって、この過渡的状態のためにセンサの較正は実現可能でない。補正モジュールは、たとえば、過渡的状態の存在を判断するために状態値にマスクを適用することができる。
【0097】
決定ブロック540において、補正モジュールは、少なくとも1つの過渡的状態が存在するかどうかを判断する。少なくとも1つの過渡的状態が存在する場合、補正モジュールは、ブロック542に進み、過渡的状態の発生より前に補正モジュールに供給された有効な補正センサ出力またはセンサ入力値をフリーズさせる。補正モジュールはブロック542からブロック570に進む。代替的に、補正モジュールは、過渡的状態の持続時間の間、無効なまたは場合によっては誤ったセンサ出力の指示を出力することができる。
【0098】
決定ブロック540において、過渡的状態が存在しないと補正モジュールが判断した場合、補正モジュールはブロック550に進む。ブロック550において、補正モジュールは、状態値に基づいて較正値または補正値を判断する。たとえば、補正モジュールは、状態値に基づいて参照表から較正値を取り出すことができる。
【0099】
補正モジュールは、ブロック560に進み、較正値を用いてセンサ出力を補正する。たとえば、補正モジュールは、センサ出力を補正するためにセンサ出力に較正オフセットを加算するように構成され得る。
【0100】
補正モジュールは、ブロック570に進み、補正センサ値を出力する。過渡的状態が存在する場合、補正モジュールは前の補正センサ値を出力する。
【0101】
電子磁気コンパスなどのためのセンサ出力の動的較正は、動的なホストデバイス状態をモニタすることによって実行され得る。センサ出力値を動的に補正するために、較正値がホストデバイス状態に基づいて判断され、センサ出力値に適用され得る。
【0102】
本明細書で説明する方法は、適用例に応じて様々な手段によって実装され得る。たとえば、これらの方法は、ハードウェア、ファームウェア、ソフトウェア、またはそれらの組合せで実装され得る。ハードウェア実装の場合、処理ユニットは、1つまたは複数の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子デバイス、本明細書で説明する機能を実行するように設計された他の電子ユニット、またはそれらの組合せの中で実装され得る。
【0103】
ファームウェアおよび/またはソフトウェア実装の場合、本方法は、本明細書で説明する機能を実行するモジュール(たとえば、手順、機能など)を用いて実装され得る。命令を有形に実施するいかなる機械可読媒体も、本明細書で説明する方法の実装において使用され得る。たとえば、ソフトウェアコードは、メモリ中に記憶されるかまたは場合によっては符号化され得、プロセッサによって実行され得る。メモリは、プロセッサの内部またはプロセッサの外部に実装され得る。本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、揮発性メモリ、不揮発性メモリ、または他のメモリのいずれかのタイプを指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0104】
1つまたは複数の例示的な実施形態では、説明した機能は、ハードウェア、ソフトウェア、ファームウェア、またはそれらの任意の組合せで実装され得る。ソフトウェアで実装した場合、機能は、1つまたは複数の命令またはコードとしてコンピュータ可読媒体上に記憶され得る。コンピュータ可読媒体は物理的コンピュータ記憶媒体を含む。伝送媒体は物理的伝送媒体を含む。記憶媒体は、コンピュータによってアクセスされ得る任意の利用可能な媒体であり得る。限定ではなく、例として、そのようなコンピュータ可読媒体は、RAM、ROM、EEPROM、CD-ROMまたは他の光ディスク(disk)ストレージ、磁気ディスク(disk)ストレージ、または他の磁気ストレージデバイス、あるいは命令またはデータ構造の形態で所望のプログラムコードを記憶するために使用され得、コンピュータによってアクセスされ得る任意の他の媒体を含むことができ、本明細書で使用するディスク(disk)およびディスク(disc)は、コンパクトディスク(disc)(CD)、レーザディスク(disc)、光ディスク(disc)、デジタル多用途ディスク(disc)(DVD)、フロッピー(登録商標)ディスク(disk)およびブルーレイディスク(disc)を含み、ディスク(disk)は、通常、データを磁気的に再生し、ディスク(disc)は、データをレーザで光学的に再生する。上記の組合せもコンピュータ可読媒体の範囲内に含めるべきである。
【0105】
方法またはプロセスにおける様々なステップまたはアクションは、示された順序で実行され得、または別の順序で実行され得る。さらに、1つまたは複数のプロセスまたは方法ステップが省略され得、あるいは1つまたは複数のプロセスまたは方法ステップが方法およびプロセスに追加され得る。追加のステップ、ブロック、またはアクションが、方法およびプロセスの開始、終了、または介在する既存の要素に追加され得る。
【0106】
開示した実施形態の上記の説明は、当業者が本開示を実施または使用できるように与えたものである。これらの実施形態への様々な修正は当業者には容易に明らかであり、本明細書で定義した一般原理は、本開示の範囲から逸脱することなく他の実施形態に適用され得る。したがって、本開示は、本明細書で示した実施形態に限定されるものではなく、本明細書で開示した原理および新規の特徴に合致する最も広い範囲を与えられるべきである。
【符号の説明】
【0107】
100 モバイルデバイス
102-1 通信アンテナ
102-1 アンテナ
102-2 アンテナ
104 デュプレクサ
110 ワイヤレス通信トランシーバ
110 トランシーバ
114 Global Navigation Satellite System(GNSS)受信機
114 GNSS受信機
122 低雑音増幅器
122 LNA
124 受信ミキサ
126 ベースバンドフィルタ
128 増幅器
128 受信増幅器
130 ベースバンドプロセッサ
142 フィルタ
144 送信増幅器
146 送信ミキサ
148 高出力増幅器
150 局部発振器
152 自動利得制御(AGC)モジュール
152 自動利得制御AGCモジュール
152 AGCモジュール
160 プロセッサ
162 メモリ
164 状態モニタ
170 センサ
172 磁力計
172 電子コンパス
172 電子磁気コンパス
174 補正モジュール
180 ユーザインターフェース
190 電源
192 バッテリー
【技術分野】
【0001】
本発明は電子センサの分野に関する。詳細には、本発明は、電子センサの精度を向上させることの分野に関する。
【背景技術】
【0002】
電子および電気機械デバイスは電子センサをますます実装している。これらのデバイスは、自律的モニタリングおよび関係する機能的特徴をサポートするためにセンサによって与えられる情報に依拠する。たとえば、デバイスは、加速度、磁針路(magnetic heading)、光源レベル(light level)などをモニタするために電子センサを実装し得る。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許出願、整理番号第091412号
【発明の概要】
【発明が解決しようとする課題】
【0004】
そのようなセンサを組み込むコストが減少するにつれて、センサを実装するデバイスの数およびタイプは増加している。さらに、センサの品質が向上するにつれて、センサ出力の微小な変化をモニタするかまたは場合によってはそのような変化に応答するホストデバイスの能力が向上する。しかしながら、センサ実装の精度は、センサ自体の精度に依存するだけではなく、センサ精度を劣化させるように作用し得る様々な外力に依存する。外力の劣化効果を最小限に抑えながら、センサの精度が維持されなければならない。
【課題を解決するための手段】
【0005】
本明細書では、ホストデバイスの変化するソフトウェアモードおよびハードウェアモードに部分的に基づく非定常(non-constant)センサ誤差、特に非定常コンパス誤差の較正および補正のための方法および装置について説明する。各モードおよびモードの組合せによってセンサ中に誘導される非定常誤差は、1つまたは複数のホストデバイスの生産前試験(pre-production testing)中に判断され得る較正において判断される。較正結果はホストデバイスのソフトウェアおよび/またはハードウェアに組み込まれ得る。通常動作中に、アクティブモードまたはモードの組合せに部分的に基づいてセンサ測定値にセンサ補正が適用され得る。
【0006】
本発明の態様は動的センサ補正の方法を含む。本方法は、センサ出力値を判断するステップと、センサを有するホストデバイスの動的状態を判断するステップと、センサと動的状態とに基づいて較正値を判断するステップと、補正センサ出力値を生成するためにセンサ出力値に較正値を適用するステップとを含む。
【0007】
本発明の態様は動的センサ補正装置を含む。本装置は、ホストデバイスの動的状態を判断するように構成された状態モニタと、状態モニタに結合された補正モジュールであって、センサ出力値を判断し、ホストデバイスの状態に基づいて較正を判断し、較正とホストデバイスの状態とに少なくとも部分的に基づいて補正センサ出力値を出力するように構成された補正モジュールとを含む。
【0008】
本発明の態様は動的センサ補正装置を含む。本装置は、センサ出力値を判断するための手段と、センサを有するホストデバイスの動的状態を判断するための手段と、センサと動的状態とに基づいて較正値を判断するための手段と、補正センサ出力値を生成するためにセンサ出力値に較正値を適用するための手段とを含む。
【0009】
本発明の態様は、プロセッサによって実行されたときに動的センサ補正を実行する1つまたは複数のプロセッサ可読命令がその上に符号化された記憶媒体を含む。本命令は、センサ出力値を判断するための命令と、センサを有するホストデバイスの動的状態を判断するための命令と、センサと動的状態とに基づいて較正値を判断するための命令と、補正センサ出力値を生成するためにセンサ出力値に較正値を適用するための命令とを含む。
【0010】
本開示の実施形態の特徴、目的、および利点は、同様の要素が同様の数字をもつ図面とともに、以下に記載する詳細な説明を読めばより明らかになろう。
【図面の簡単な説明】
【0011】
【図1】モバイルデバイスの一実施形態の簡略機能ブロック図である。
【図2】状態表の一実施形態の簡略ブロック図である。
【図3】較正表の一実施形態の簡略ブロック図である。
【図4】電子磁気コンパスを補償するように構成された補正モジュールの一実施形態の簡略機能ブロック図である。
【図5】電子磁気コンパス出力など、センサ出力を動的に補正する一実施形態の簡略フローチャートである。
【発明を実施するための形態】
【0012】
本明細書では、動的に変化するセンサ環境中にセンサが実装されたとき、センサ出力の精度を維持するための方法および装置について説明する。広範囲のデバイス動作モードにわたってセンサ精度を維持するための動的較正および補正の方法および装置について本明細書で説明する。
【0013】
低減されたコスト、サイズ、および電力消費量を有し、それにより、モバイルデバイスなどのホストデバイスにセンサを追加することが可能になるセンサの一例は、2軸または3軸磁力計である。磁力計は、センサの近傍における磁界の方向および/または強度を測定するために使用され得るセンサのタイプである。磁力計の一例は、印加された磁界に比例する電圧を生成し、磁界の極性を感知するために使用され得る、固体ホール効果センサである。磁力計の別の例はフラックスゲート磁力計である。
【0014】
磁力計出力、および時々、加速度計出力のような他のセンサデータに基づいて、モバイルデバイスプロセッサは、地磁極への方向を表す磁気子午線に対するデバイス配向を指す磁針路を計算することができる。コンパス誤差をフィルタリングするために、利用可能であれば、ジャイロスコープデータ、または何らかの他の角速度センサからのデータなど、他のセンサデータも使用され得る。磁針路が判断された後、磁針路値は、磁気偏角表(magnetic declination table)の助けをかりて、地理的子午線に対する真針路(True Heading)値に変換され得る。
【0015】
モバイルデバイスは、位置ロケーションまたはナビゲーションアプリケーションにおいて支援するために、磁力計などの電子磁気コンパスを組み込み得る。一例では、モバイルデバイスは、ユーザがデバイスをあるオブジェクトにポイントさせ、デバイスソフトウェアが、判断されたまたは場合によっては知られているロケーションおよび時間と、針路と、地図データベースとを使用してそのオブジェクトを識別する、「ポイントアンドクリック」アプリケーションを実装し得る。
【0016】
モバイルデバイスは、たとえば、セルラー電話、GPS受信機、パーソナルナビゲーションデバイスなど、またはそれらの何らかの組合せであり得る。「モバイルデバイス」という用語は、これらの列挙した例示的なデバイスに限定されず、衛星信号受信、支援データ受信、および/または位置に関係する処理が当該デバイスで発生するかパーソナルナビゲーションデバイス(PND)で発生するかにかかわらず、短距離ワイヤレス、赤外線、ワイヤライン接続、または他の接続などによってPNDと通信するデバイスを少なくとも含むものとする。また、「モバイルデバイス」は、インターネット、Wi-Fi、または他のネットワークなどを介してサーバまたは他の通信デバイスとの通信が可能であり、衛星信号受信、支援データ受信、および/または位置に関係する処理が当該デバイスで発生するか、サーバで発生するか、またはネットワークに関連する別のデバイスで発生するかにかかわらず、ワイヤレス通信デバイス、コンピュータ、ラップトップなどを含むすべてのデバイスを含むものとする。上記のいかなる動作可能な組合せも「モバイルデバイス」と見なされる。
【0017】
コンパス精度についての限定的なファクタは、モバイルデバイスの内側および外側にある鉄物体の存在を含むことができる。鉄デバイスから生じる磁界は、地磁界上に重畳されると、一般に、磁力計の近傍において磁気子午線方向のひずみを生じる。これらのひずみはコンパス誤差の一因となる。
【0018】
センサ性能に対する外部物体の影響を緩和することはより困難であるが、内部の鉄鋼材の影響は、多くの場合、較正され得る。鉄鋼材は、センサの位置に対して位置が変化することができる機械構造において実施され得る。たとえば、モバイルデバイスは、クラムシェル(clamshell)スタイル電話などのヒンジ式構造、またはヒンジ式ディスプレイパネルを有し得る。他の可動の機械構造は、スライド可能なキーパッドカバーなどを含む。これらの可動の機械構造の各々は、センサ較正に影響を及ぼすか、あるいはセンサ較正に対する影響の効果を遮断するかまたは場合によっては目立たなくすることができる、鉄鋼材を有し得る。機械構造の影響も較正され得る。較正は、工場較正またはユーザ較正手順のうちの1つまたは複数であり得る。鉄物体が磁力計に対して定位置にとどまる限り、そのような静的較正は十分であり得る。
【0019】
しかしながら、磁力計またはコンパスの誤差の別の原因は、モバイルデバイス内の電流によって誘導される磁界である。電流の流れからの誘導磁界の影響は、磁界を誘導する電流線から物理的に十分遠くに磁力計を配置することによって緩和され得る。残念ながら、モバイルデバイスの物理的サイズが縮小するにつれて、磁界を誘導する電流線から物理的に遠くにあるロケーションに磁力計を格納する能力は制限される。さらに、デバイス設計者の観点から、コンパス性能は、モバイルデバイス内のワイヤレスモデム、GPS受信機、フォトカメラまたはディスプレイの性能に対して二次的であるかまたは場合によっては優先度がより低いことがある。したがって、磁力計または他のセンサは、しばしば、結局、最適とは言えないロケーションに配置されることになる。磁力計の場合、最適とは言えないロケーションは、スピーカー、バッテリー、スイッチモード電源、または何らかの他の高電流部品の近くのロケーションであり得る。
【0020】
電流によって誘導された磁界から生じる磁力計誤差は較正され得る。ただし、較正は、電流が一定のままである時間の間、有効である。一般に、モバイルデバイス内の電流は時間とともに変動するかまたは間欠的であるので、従来の較正方法を使用して電流の影響を較正することが難しくなる。旧来、変化するイベントおよびプロセスによって生じる変動するコンパス誤差は、ユーザが受け入れるしかなかった誤差を生じた。
【0021】
本明細書では、変化するソフトウェアおよびハードウェアデバイスのモードまたは状態によって生じる非定常コンパス誤差の動的較正および補正のための方法および装置について説明する。重要なコンパス誤差の一因となるモードまたはデバイス状態が識別され得る。これらのモードのいくつかのまたはあらゆる組合せによって誘導される誤差は、1つまたは複数のデバイスの生産前試験中に較正され得、較正結果がモバイルデバイスに組み込まれ得る。モバイルデバイスの生産中に、同様の構成を有するモバイルデバイスに対して較正表を使用し、それによって、各生産デバイスに対して個別の較正を実行する必要性を最小限に抑えることができる。動作中、モードまたはモードの組合せに応じて、コンパス測定値に補正が適用される。
【0022】
図1は、モバイルデバイス100の一実施形態の簡略機能ブロック図である。図1のモバイルデバイス100は、位置ロケーション対応ワイヤレス通信デバイスとして示されている。しかしながら、モバイルデバイス100はそのような構成に限定されない。
【0023】
モバイルデバイス100は、ベースバンドプロセッサ130に結合されたワイヤレス通信トランシーバ110と、Global Navigation Satellite System(GNSS)受信機114と、センサ170とを含む。センサ170のうちの1つまたは複数の出力は、補正モジュール174を使用して補償されるかまたは場合によっては補正され得る。状態モニタ164は、モバイルデバイス100の状態またはモードをモニタし、状態またはモード情報を補正モジュール174に供給することができる。
【0024】
ワイヤレス通信トランシーバ110の様々な段の利得は、自動利得制御(AGC)モジュール152を使用して制御され得る。動的センサ較正および補正に関連する1つまたは複数の機能またはプロセスを含む、モバイルデバイス100内の1つまたは複数の機能またはプロセスは、メモリ162中に符号化された1つまたは複数のソフトウェア命令を実行するプロセッサ160を使用して制御されるかまたは場合によっては実装され得る。
【0025】
モバイルデバイス100は、電源190において処理されるかまたは場合によっては調整されるバッテリー192で動作し得る。ユーザインターフェース180を使用してローカル入力および出力が実装される。
【0026】
ワイヤレス通信トランシーバ110は受信機および送信機を含むことができる。受信機および送信機は、たとえば、ワイヤレス通信トランシーバ110による同時送受信を可能にするデュプレクサ104を介して、共通の通信アンテナ102-1にインターフェースすることができる。時分割多元接続(TDMA)トランシーバ110構成では、デュプレクサ104は、送信機または受信機のうちの一方をアンテナ102-1に選択的に結合するために送信/受信(T/R)スイッチと置き換えられ得る。
【0027】
ワイヤレス通信トランシーバ110内の受信機は、デュプレクサ104を介してアンテナ信号を受信する低雑音増幅器122など、増幅器を含むことができる。LNA122の出力は、受信信号をそれのRF帯域からベースバンド周波数に直接変換するように構成された受信ミキサ124に結合される。受信ミキサ124は、受信RF中心周波数に基づく周波数に調整された局部発振器150によって駆動され得る。
【0028】
受信ミキサ124からのベースバンド出力は、不要なミキサ積(mixer product)を除去し、帯域外信号をフィルタ処理するように構成されたベースバンドフィルタ126に結合される。ベースバンドフィルタ126の出力は、増幅器128に結合され、その後、ベースバンドプロセッサ130の受信信号入力に結合される。
【0029】
ワイヤレス通信トランシーバ110内の送信機は、受信機に対して補足的な方法で動作する。ベースバンドプロセッサ130の送信出力において送信信号が生成される。ワイヤレス通信トランシーバ110の一例では、ベースバンドプロセッサ130からの送信出力は、送信/受信周波数オフセットに基づいて判断された中間周波数にあり得る。別の例では、ベースバンドプロセッサ130からの送信出力はベースバンドにあり得る。
【0030】
ベースバンドプロセッサ130からの出力は、送信信号帯域幅の外部の信号を減衰させるように構成され得るフィルタ142に結合される。フィルタ142からの出力は送信増幅器144に結合される。送信増幅器144の出力は、局部発振器150からの信号と併せて送信信号をそれの所望の動作周波数に周波数変換するように構成された送信ミキサ146に結合される。
【0031】
送信ミキサ146からの出力は、送信信号を所望のRF電力レベルに増幅するように構成された高出力増幅器148に結合される。高出力増幅器148からの出力は、送信のためにデュプレクサ104を介してアンテナ102-1に結合される。
【0032】
自動利得制御AGCモジュール152は、ワイヤレス通信トランシーバ110の送信機および受信機において利得を制御するように構成され得、ベースバンドプロセッサ130において1つまたは複数の利得を制御するように構成され得る。AGCモジュール152は、様々な利得を制御するために、たとえば、1つまたは複数の検出器、増幅器、およびトランジスタ、電圧調整器、または相互コンダクタンスデバイスを含むことができる。いくつかの実施形態では、AGCモジュール152の機能の一部は、プロセッサ160によって実行されるメモリ中で符号化されたプロセッサ可読命令を使用して実行され得る。
【0033】
AGCモジュール152は、利得を制御するために、たとえば、減衰値、電圧、電流など、またはそれらの何らかの組合せを制御することができる。たとえば、AGCモジュール152は、受信機においてLNA122を選択的に有効または無効にし得、増幅器への電流バイアスを調整することによって受信増幅器128の利得を選択的に制御し得る。
【0034】
AGCモジュール152は、たとえば、高出力増幅器148ならびに送信増幅器144の電流または電圧を制御することによって、送信機において利得を制御し得る。AGCモジュール152は、実質的に連続的に、あるいは所定数の段または利得量子化を介して利得を制御するように構成され得る。AGCモジュール152は、いくつかの増幅器、たとえば144を連続的な利得範囲にわたって制御しながら、他の増幅器、たとえば148を離散的な利得ステップで制御することができる。
【0035】
GNSS受信機114は、たとえば、Global Positioning System(GPS)受信機であることができ、あるいはロシアのGlonassシステム、欧州のGalileoシステム、または衛星システムの組合せからの衛星を使用する任意のシステムなど、1つまたは複数の他の衛星測位システムからの信号に作用するように構成され得る。GNSS受信機114は、アンテナ102-2を介して測位衛星ビークルから信号を受信し、受信機の位置フィックスを計算することができる。位置フィックスは、モバイルデバイス100においてリモートで実行され得、あるいは、モバイルデバイス100がそれらと通信していることがあり得る1つまたは複数のリモートプロセッサ、サーバ、またはエンティティと併せて実行され得る。
【0036】
1つまたは複数のセンサ170は、モバイルデバイス100に関連する位置、配向、針路、加速度、または他のパラメータを判断するように構成され得る。一例では、センサ170は、モバイルデバイス100の針路を判断するために使用され得る磁力計172を含む。
【0037】
ユーザインターフェース180は、ユーザディスプレイ、キーパッド、マイクロフォン、ラウドスピーカーなど、またはそれらの何らかの組合せを含むことができる。ユーザインターフェースはまた、通信または他の電子データおよび信号の交換のための1つまたは複数のポートを含むことができる。
【0038】
状態モニタ164は、1つまたは複数のセンサ170の精度に影響を及ぼすものと判断される、モバイルデバイス内の様々なハードウェアおよびソフトウェアの1つまたは複数の状態またはモードをモニタするように構成される。
【0039】
センサ精度に影響を及ぼし得る任意の数の異なるイベント、動作状態、またはモードがある。状態は、電気的であるか、または機械的であるか、またはそれらの組合せであり得る。磁力計172の例では、電流の流れの変動が、磁力計172によって示される針路の精度に影響を及ぼす磁界を誘導することができる。電子デバイスにおいて電流変化を生じるイベントの例には、オフまたはオンにされ得る、ユーザインターフェース180におけるディスプレイバックライトがある。さらに、バックライトがオンにされるとき、低、中、高のように、それぞれバッテリー192から異なる電流を必要とするいくつかのバックライトレベルがあり得る。センサ精度への各要因の影響は、時間および温度にわたって一貫しているか、または時間、温度などに基づいて変動し得る。電流の流れの変化を生じる他のイベントまたはモードには、アクティブにされると一般に電流スパイクを生じる、リンガー、バイブレータ、またはビーパーがある。機械的状態の例には、ヒンジ式カバー、スライド可能なカバーなどがある。
【0040】
バッテリー192が充電されているとき、モバイルデバイス100中の電流の流れは、バッテリー192が消耗しているかまたは場合によっては充電されていないときとは異なる。バッテリー192の充電の場合、電流が変動するだけでなく、バッテリー192が充電されているかどうかに基づいて電流の方向も変動し得る。
【0041】
ワイヤレストランシーバ(モデム)またはフォトカメラのアクティブ化など、モバイルデバイス100内のハードウェアのどんなモード変化も電流分布に影響を及ぼす。ワイヤレス通信トランシーバ110は、送信機と受信機とを独立してアクティブにし得る。同様に、GNSS受信機114は、選択的にアクティブまたは非アクティブにされ得る。
【0042】
プロセッサ160の計算負荷が低いとき、電力管理能力をもつプロセッサのクロックレートは低下され得る。クロックレートを低減すると、一般に、電力消費量および電流がそれぞれ低減する。たとえば、電力最適化を用いるGPSデバイスでは、GPS位置を計算し、地図を再描画するために広範な計算が必要とされるとき、処理クロックレートは通常、1秒ごとに1回ピークに達する。ピーク計算負荷の間、誘導される磁力計誤差もピークに達し得る。
【0043】
強いGPS信号が利用可能であるとき、GNSS受信機114は低デューティサイクルモードに入れられ得、GNSS受信機114の一部は、たとえば毎秒500ms間停止する。周期的停止は、GNSS受信機114によって消費される電流において同様の周期サイクルを生じる。
【0044】
電流の流れに影響を及ぼすか、または磁界に機械的に影響を及ぼし、それによって誘導磁界に影響を及ぼし、磁力計172などの磁気センサに影響を及ぼすタイプの事象の例として、様々な状態、モード、プロセス、およびイベントを与える。これらの例は網羅的なリストではなく、本明細書では概して状態と呼ぶ、センサ精度に影響を及ぼす多くの他のハードウェアまたはソフトウェア状態、モード、またはイベントがあり得る。
【0045】
様々な状態は、論理的に相互排他的であるか、独立であるか、または依存し得ることがわかるであろう。たとえば、アクティブにされたGNSS受信機は、非アクティブにされたGNSS受信機とは論理的に相互排他的である。同様に、GNSS受信機状態は、一般に、ディスプレイバックライト状態とは論理的に独立している。
【0046】
対照的に、いくつかの状態は論理的に依存し得る。たとえば、通信受信機AGC状態は通信受信機アクティブ化状態に論理的に依存する。通信受信機が作動してない場合、受信機AGC状態の値は有意性を有しない。
【0047】
様々な状態間の論理関係は、様々な電流とそれらの対応する誘導磁界との間の相互作用を判断するのに役立ち得る。ただし、状態間の論理関係は、モバイルデバイス100内の電流の流れの関係に厳密に対応しないことがある。たとえば、いくつかの独立状態がモバイルデバイス100内のハードウェアを共有し得、両方の状態が存在する場合、一方のみの状態が存在するときに対してモバイルデバイス100内の電流の流れが増加しないことがある。たとえば、GNSS受信機114は、ワイヤレス通信トランシーバ110によっても使用される中間データおよび情報をベースバンドプロセッサ130に提供し得る。アクティブGNSS測位状態は、作動しているベースバンドプロセッサ130に対応し得る。GNSS測位状態とワイヤレス通信状態とは論理的に独立であるが、ワイヤレス通信状態のアクティブ化は、ベースバンドプロセッサ130による追加の電流消費を生じないことがある。
【0048】
したがって、補正モジュール174によってセンサ170からの出力に与えられる補償は、一般に、単に個々の各状態の補償の重ね合わせではない。代わりに、補正モジュール174は、状態モニタ164から状態を判断し、様々な状態間の相互関係を考慮に入れる累積補正をセンサ170の各々に適用することができる。
【0049】
動的センサ補償および補正を与えるために、顕著なセンサ誤差を生じるモバイルデバイス100中のハードウェアおよびソフトウェアのプロセスおよびモードを含む状態が識別される。状態モニタ164は、識別された状態の各々をモニタするように構成される。状態モニタ164は、ソフトウェア状態などの状態を直接モニタするように構成され得、あるいは状態を間接的にモニタするかまたは場合によっては推論するように構成され得る。
【0050】
状態および状態の組合せごとに、センサは較正される。たとえば、磁力計または電子コンパスを較正するプロセスは、状態および状態の組合せの各々について、コンパス誤差を較正または場合によっては測定することを含むことができる。較正は、必要であれば、各磁力計軸について別々に行われ得る。
【0051】
いくつかの状態は、過渡的(transitory)であり得、短い時間期間の間のみアクティブであり得る。とはいえ、これらの短い遷移状態はセンサ精度に顕著な影響を及ぼし得る。たとえば、バッテリー充電器が初めてモバイルデバイス100に接続されたとき、モバイルデバイス100内の電流の流れに著しい変化があり得る。電流の流れがバッテリー192外からバッテリー192内へと変化するだけでなく、最初のバッテリー充電に関連する突入電流(in-rush current)があり得る。電流の流れの変化ならびに突入電流は電子コンパス精度に顕著な影響を及ぼし得る。しかしながら、この顕著な影響は極めて短期間のものであり得る。
【0052】
そのような遷移状態の過渡的性質は、誘導されたセンサ誤差を正確に測定し、較正することを困難にし得る。電話バイブレータは、電子磁気コンパスの精度に悪影響を及ぼすが、一般に、短い規定された時間期間の間のみ動作するデバイスの一例である。これらの短い遷移状態について、補正モジュール174は、センサ示度(reading)を廃棄し、示度を雑音としてマークし、または場合によっては過渡的影響を補償するように構成され得る。たとえば、電子コンパスにおいて、補正モジュールは、過渡的状態の発現に対応する時間に表示された針路をフリーズさせ得る。補正モジュール174は、たとえば、遷移状態中にセンサ出力のバッファされたまたは登録された値を与えることができる。
【0053】
補正モジュール174は、補正センサ出力に補正値を加算するように構成され得る。別の実施形態では、補正モジュールの機能の一部または全部は、メモリ162などのプロセッサ可読ストレージデバイス上に符号化された1つまたは複数の命令および情報として実施され得る。1つまたは複数の命令および情報は、プロセッサ160によってアクセスされ、実行されたとき、センサ補正を実装することができる。一実施形態では、モバイルデバイス100のソフトウェア内にリアルタイムコンパス補正アルゴリズムが実装される。このアルゴリズムは、プロセッサ160によって実行されたとき、デバイス状態およびそれらの組合せを識別し、較正結果に基づいて磁力計示度に適切な補正を導入することができる。
【0054】
補正モジュール174は、静的較正表など、既存の補正表を増補するために利用され得る。他の実施形態では、補正モジュール174は、センサを較正するために利用され得る。センサに対する較正表は、工場較正、ユーザ開始較正、または自動較正の結果として開始および生成され得る。
【0055】
工場較正は、デバイスが初めて構築されたとき、プロビジョニングされたとき、または使用されたときに実行されるかまたは場合によってはロードされ得る。工場較正は、個々のデバイスごとに実行され得るが、同様のデバイスのサンプルセットから実行された較正に基づいてロードされる可能性がより高い。
【0056】
ユーザ較正は、手動で、および一般的にはデバイスに対してローカルに開始され得る較正プロセスを表す。ユーザ較正は、所定のセットのキー押下など、所定のセットのアクション時に、あるいはユーザがデバイスをいくつかの静的配向に連続的に配置すること、または特定の所定の方法でデバイスを回転させることなど、いくつかの操作を実行したときに開始し得る。
【0057】
自動較正は、ユーザ関与なしにバックグラウンドで行われ得る。自動較正は、寿命、イベント、または寿命とイベントとの組合せに基づいて開始し得る。たとえば、自動較正は、ホストデバイスが所望の配向に配置されるかまたは一定の方法で移動されたときに開始し得る。自動較正については、そのすべてが参照により本明細書に組み込まれる、本明細書とともに出願され、本開示と同じ譲受人を有するChristopher Brunnerによる「Calibrating Multi-Dimensional Sensor for Offset, Sensitivity, and Non-Orthogonality」と題する米国特許出願、整理番号第091412号において説明されている。
【0058】
ユーザ較正および自動較正は、工場較正を増補するかまたは工場較正の代わりに使用するために使用され得る。たとえば、工場較正においてすべてのパラメータまたは状態が較正されるわけではないことがあり、工場較正はデバイスのサンプリングに基づき得るが、各一意のデバイスはそれ自体の特性を有し得る。たとえば、バッテリーは一般にそれら自体の磁性を有する。同様に、工場較正のパラメータは、実際のデバイス条件とは異なる条件で較正されていることがある。たとえば、工場較正は、動作温度範囲全体に及ばないことがあるか、または比較的強い地磁界をもつエリアにおいて実行され得、次いで、デバイスは水平磁界強度がはるかに弱いロケーションにおいて使用される。
【0059】
工場較正が破損し、損失し、または場合によっては無効になった場合、ユーザ較正および自動較正は特に有用であり得る。たとえば、ホストデバイスが不注意に磁化され、したがって工場較正が無効になることがある。たとえば、ホストデバイスが落下したために、センサがそれのマウント上でシフトされるか、またはマウントボードがホストデバイスハウジングに対してシフトし得るので、工場較正が不十分になることがある。
【0060】
すべてのタイプの較正は、一般に、モニタされ得るホストデバイス状態を相殺する。すなわち、ある状態のデバイスに対してユーザ較正または自動較正が行われた場合、較正結果は、この状態に対応するものとして記録され、デバイスが将来この状態になったときに適用されなければならない。効果的にモニタされるが制御することが困難であり得る特定の状態の一例は、デバイス温度である。
【0061】
同じ状態における同じパラメータが、可能な較正(工場、ユーザ、自動車)のうちの2つ以上を使用して較正された場合、結果は、各較正品質および時期(age)に応じて、いくつかの優先度が1つの較正タイプまたは較正時期に与えられて、重みを用いて平均化され得る。
【0062】
図2は、状態表200の一実施形態の簡略ブロック図である。状態表200は、たとえば、図1の状態モニタ164によって維持されるかまたは場合によっては導出され得る。状態モニタは、周期的ベースで、イベントベースで、またはそれらの何らかの組合せで状態表を更新し得る。
【0063】
図2の状態表200は、状態モニタによってモニタされ得る状態のタイプの一例である。状態表200に示す状態の数は、簡潔のために限定されており、モニタされ得る状態のタイプの網羅的なリスティングであるものではない。前述のように、「状態」という用語は、本明細書では、ハードウェアで実装されるか、ソフトウェアで実装されるか、またはそれらの組合せで実装されるにかかわらず、状態、モード、またはプロセスを指すために使用される。さらに、状態表200の状態は遷移状態を含み得る。遷移状態は、たとえば、状態表200における1つの状態から別の状態への遷移を示すことができる。
【0064】
一実施形態では、状態表200は、メモリ中に実装され得、1つまたは複数のプロセッサによって書き込まれ得る。たとえば、ソフトウェア動作を制御する各プロセッサは、状態の変化時に状態表を更新し得る。さらに、1つまたは複数のプロセッサは、モバイルデバイス内のハードウェア状態をモニタ、サンプリング、または場合によってはポーリングし、ハードウェアモニタリングに従って状態表200を更新するように構成され得る。いくつかの事例において、プロセッサ以外のハードウェアは、状態表200に直接アクセスし、状態表200を編集する能力を有し得る。
【0065】
別の実施形態では、状態表200はハードウェアで実装され得る。たとえば、状態表中の各ビットは、検出器、電流動作スイッチ、電圧モニタなど、またはそれらの何らかの組合せなど、ハードウェアモニタに対応することができる。電流モニタは、たとえば、図1の高出力増幅器またはベースバンド増幅器など、モジュールまたは増幅器に印加されたバイアス電流をモニタし、そのバイアス電流に基づいて増幅器の状態を判断し、報告することができる。電流モニタ出力は、状態を状態表200中のエントリとして直接報告するように構成され得る。同様に、電圧モニタは、モジュールまたはデバイスが電圧の印加を通してアクティブにされる、デバイスまたはモジュールのバイアス電圧に基づいて状態をモニタし、報告し得る。
【0066】
さらに他の実施形態は、状態表200を実装し、更新するためにソフトウェアとハードウェアの組合せを利用し得る。ソフトウェア上で動作するプロセッサは、ソフトウェア状態をモニタし、報告し得、ハードウェア状態およびハードウェアモニタの一部は、他のハードウェア状態をモニタし、報告するために使用され得る。いくつかの実施形態では、プロセッサで実行されるソフトウェアは、状態をモニタし、報告するために、ハードウェアと連携して動作し得る。
【0067】
たとえば、機械的特徴の状態は、直接モニタされるか、またはソフトウェアによってモニタされ得る。ソフトウェアは、センサ、スイッチ、検出器などを使用して1つまたは複数の機械的特徴の状態をモニタし得る。たとえば、センサまたはスイッチを使用して折り畳みカバーまたはスライディングカバーの位置を示し得る。代替的に、ソフトウェアは、1つまたは複数の関係するパラメータに基づいて機械的特徴の状態を推論、推測、または場合によっては間接的に判断し得る。たとえば、ソフトウェアは、キー押下の検出時にキーパッドカバーが開状態にあることを推論し得る。同様に、バックライトがオンのとき、ディスプレイカバーが開位置にあることが推測され得る。他の機械的特徴は、同様の様式で感知されるかまたは場合によっては判断され得る。
【0068】
図2の状態表200の例は、いくつかの独立状態ならびにいくつかの依存状態を示している。状態表200は、送信機アクティブ202と、受信機アクティブ204と、GNSS受信機アクティブ206と、バックライトアクティブ208との状態エントリを含む。状態表200はまた、いくつかの依存状態エントリを含む。これらは、その有意性が送信機アクティブ202状態に依存する2ビットの送信機AGC状態212を含む。同様に、受信機LNA状態222と、2ビットの受信機AGC状態224とは、受信機アクティブ204の状態に依存する。
【0069】
送信機AGC212および受信機AGC224などの依存状態の値は、それらが依存する状態の状態に基づいてのみ有意であり得る。たとえば、時間t0において、送信機アクティブ状態ビット250-1は送信機がアクティブでないことを示しているので、送信機AGC状態212のステータスビット250-2は「無関係(don't care)」状態に設定され得る。「無関係」ステータスは、AGC状態212のすべての可能な組合せについて、モバイルデバイスの状態が本質的に同じであることを示す。
【0070】
後の時間t1において、状態表200中のステータスビットは、モバイルデバイス状態の変化を示すために変化する。状態表は、イベントなど、またはそれらの何らかの組合せに基づいて周期的に更新し得る。時間t1において、受信機アクティブビット260-1は受信機がアクティブであることを示しており、したがって、対応する受信機AGCビット260-2の状態は、センサ較正に影響を及ぼすモバイルデバイスの状態を有効に示す。
【0071】
図2の状態表200の例はアクティブハイ論理を使用しているが、本発明はいかなる特定の論理規約にも限定されない。実際、状態表200中のエントリはバイナリである必要はなく、何らかの他の指示でもよく、その指示は数字である必要さえない。
【0072】
上記のように、様々な状態の論理的独立性は、必ずしもセンサに対する影響の独立性と等価にならない。したがって、状態表200の異なるインスタンスは様々な状態の可能な組合せを示すことができ、状態の異なる組合せの各々は一意のセンサ補正に対応し得る。
【0073】
図3は、較正表の一実施形態の簡略ブロック図である。較正表300は、たとえば、図1の補正モジュール174中に実装され得る。較正表300は状態値エントリ310ならびに較正値320を含む。図3の較正表において、各デバイス状態値は、対応する較正値にマッピングし得、較正値は、補正係数、補償値、または較正オフセットとして実装され得る。
【0074】
追加のコンパス誤差を生じ得る多数のデバイス状態および状態の複数の組合せは、較正表を準備する作業を過度に複雑に見えるようにするようである。しかしながら、誤差は一般に所与のモデルのすべてのデバイスについて同様であるので、実際の較正(誤差測定)は、生産前試験中などに単一のデバイスまたはデバイスのサンプル上で行われ得る。較正結果は、同じモデルのすべてのデバイスのための共通の較正表に組み込まれ得る。
【0075】
較正表300は較正値320に直接マッピングする状態値エントリ310を示しているが、マッピングは直接的である必要はない。状態値エントリ310を対応する較正値320にマッピングする他の方法があり、本発明はいかなる特定のマッピング方法にも限定されない。たとえば、各状態値エントリ310はメモリ中のアドレスに関連付けられ得、そのメモリ中のアドレスが対応する較正値320を記憶することができる。同様に、各状態値エントリ310は、対応する較正値320を保持するアドレスをポイントするポインタに関連付けられ得る。
【0076】
モバイルデバイスは、状態モニタにとって利用可能でない状態または状態の組合せに入ることが可能であることに留意されたい。たとえば、ディスプレイ上のピクチャのピクセルの照度が磁力計に影響を及ぼし得、スクリーン状態の数は、状態モニタにおいて追跡されるにはあまりに大きくなり得る。別の例として、磁力計に影響を及ぼすデバイスの状態は、ソフトウェア制限により状態モニタには利用可能にされ得ない。
【0077】
したがって、状態モニタによって報告される状態または状態の組合せに対して複数の有効な較正値があり得る。そうである場合、状態モニタによって報告される同じ状態に対して、たとえば、自動較正によって取得された複数の較正値が記憶され得る。
【0078】
状態モニタがすべての関係する状態を追跡することができない場合、状態モニタによって報告される状態または状態の組合せに関連する複数の較正値から、どの較正セットが最も良く適合するかに基づいて較正値が選択され得る。適合基準は、3D磁力計の較正された磁力計サンプルが球上に配置されていることを活用し得る。
【0079】
状態の組合せに起因する誤差の補正を可能にするために、状態値エントリ310によって具備される状態の異なる組合せの各々は較正値320に対応し、組合せのための補正は、個々の各状態の補正値の合計とは異なり得る。いくつかの状態値は同じ較正値にマッピングし得る。たとえば、依存状態の状態値のいくつかの組合せは、それらが依存する独立状態の状態に応じて同じ較正値にマッピングし得る。
【0080】
較正表300はまた、状態値エントリ310ごとにただ1つの較正値を示している。しかしながら、他の実施形態では、1つまたは複数の追加のパラメータが較正値に影響を及ぼし得る。たとえば、電子磁気コンパスなどのセンサのために戻される較正値は、針路がある象限(quadrant)に部分的に依存し得る。さらに、センサのために戻される較正値は温度または何らかの他のパラメータに依存し得る。いくつかの事例において、これらの追加のパラメータの各々は追加の状態値としてモニタされ得る。代替的に、追加の1つまたは複数のパラメータは、ホストデバイスの状態とは排他的であり得る。追加のパラメータが状態値に加えられる場合、較正表300は、状態エントリごとにパラメータ値の範囲の較正値を記憶するように構成され得る。代替的に、較正表300は、パラメータに基づき、較正表300から戻された較正値に適用される、1つまたは複数の追加の補正値を記憶することができる。
【0081】
図4は、図4では電子磁気コンパス172として示すセンサを補償するように構成された補正モジュール174の一実施形態の簡略機能ブロック図である。電子コンパス172は、磁界に基づいて針路を感知し、針路を示す信号を出力する。補正モジュール174は、センサ出力を受信し、状態モニタ164から状態値を受信し、較正値を判断する。補正モジュール174は、補正センサ出力を生成するためにセンサ出力に較正値を加算する。状態モニタ164が1つまたは複数の過渡的状態の存在を示す場合、補正モジュール174は、たとえば、過渡的状態の持続時間の間、前の補正センサ出力を供給することによって補正センサ出力をフリーズさせ得る。
【0082】
図4の実施形態では、補正モジュール174は、センサ出力を受信するように構成されたレジスタ410を含む。レジスタ410は、たとえば、サンプルアンドホールドモジュール、RSラッチ、Dフリップフロップ、または何らかの他のストレージデバイスであり得る。レジスタ410のタイプは、たとえば、電子磁気コンパス172などのセンサがアナログ出力を供給するかまたはデジタル出力を供給するかに依存することができる。
【0083】
レジスタ410の出力は第1の加算器420の第1の入力に結合される。較正値は加算器420の第2の入力に結合される。加算器420は、補正センサ出力を生成するためにセンサ出力に較正値を加算するように構成される。補正センサ出力は、加算器420の出力から低域フィルタなどのフィルタ430に結合され得る。低域フィルタ430は、補正センサ出力から雑音を除去するように構成され得る。さらに、低域フィルタ430は、センサ応答時間を抑えるかまたは場合によっては遅くするように構成され得る。低域フィルタ430の出力は補正センサ出力である。いくつかの実施形態では、低域フィルタ430は省略され、第1の加算器420が補正センサ出力を供給する。
【0084】
補正モジュール174は、状態モニタ164とともに較正値を判断する。補正モジュール174はまた、状態モニタ164の出力に結合されるか、または場合によっては状態表にアクセスできる。
【0085】
状態モニタがすべての関係する状態を追跡することができない場合、状態モニタによって報告される状態または状態の組合せに関連する複数の較正値から、どの較正セットが最も良く適合するかに基づいて較正値が選択され得る。適合基準は、3D磁力計の較正された磁力計サンプルが球上に配置されていることを活用し得る。
【0086】
一実施形態では、補正モジュール174は、メモリ462に記憶された命令に従って動作するプロセッサ460を含む。プロセッサ460は、状態モニタ164からの状態表値にアクセスするかまたは場合によってはその状態表値を受信する。
【0087】
プロセッサ460は、状態値を利用して、図3の較正表300などの参照表にアクセスする。較正表300は、補正モジュール174とは別々のものとして示されている。しかしながら、いくつかの実施形態では、較正表300は補正モジュール174の一部であり得る。プロセッサ460は、状態値に少なくとも部分的に基づいて較正表300から較正値を取り出す。プロセッサ460は較正レジスタ470に較正値を書き込む。
【0088】
較正レジスタ470は較正値を較正値フィルタ480に供給する。較正値フィルタ480は、較正値中に存在する雑音をフィルタ処理するように構成され、較正値の応答時間を抑えるかまたは場合によっては制御するように構成され得る。図4では特定の構造の較正フィルタ480を示しているが、補正モジュールは、いかなる特定のフィルタ構造にも限定されず、較正値フィルタ480さえ省略し得る。
【0089】
較正値フィルタ480は、レジスタ470から較正値を受信するように構成された第1の入力を有する第2の加算器482を含む。第2の加算器482の出力は、第1の加算器420に結合される較正値を表す。
【0090】
第2の加算器482の出力はまた、遅延モジュール484の入力に結合される。遅延モジュール484の出力は信号スケーラ486に結合される。信号スケーラ486は、遅延された較正値をスケーリングし、そのスケーリングされた値を第2の加算器482の第2の入力に結合する。
【0091】
状態モニタが過渡(transient)状態または場合によっては過渡的状態を示す状況では、プロセッサ460は、処理されているセンサ値をフリーズさせることができる。たとえば、プロセッサは、過渡的状態の発生より前に存在していた値を保持するために、レジスタ410と較正レジスタ470とをフリーズさせることができる。
【0092】
状態モニタ164は状態値を常に更新しているので、補正モジュール174は、モバイルデバイスの状態に基づいてセンサ出力を動的に補正することが可能である。このようにして、センサ出力はより正確になる。
【0093】
図5は、電子磁気コンパス出力などのセンサ出力を動的に補正する方法500の一実施形態の簡略フローチャートである。方法500は、図1のモバイルデバイスによって実装され得、特に、状態モニタおよび較正表と併せて動作する図4の補正モジュールによって実装され得る。
【0094】
方法500はブロック510において開始し、補正モジュールはセンサ出力を受信する。たとえば、補正モジュールは、電子磁気コンパスから針路示度を受信し得る。補正モジュールは、センサ出力値を登録するかまたは場合によっては記憶し得る。
【0095】
補正モジュールは、ブロック520に進み、デバイス状態を判断する。一実施形態では、状態モニタは、センサ精度に影響を及ぼすホストデバイスのセンサ状態を追跡する。状態モニタは、異なるセンサの異なるデバイス状態を追跡し得る。電子磁気コンパスの場合、電流の流れによって誘導された磁界がコンパス示度の精度に影響を及ぼし得るので、状態モニタは、デバイス内の電流の流れの変化に関係するデバイス状態を追跡し得る。
【0096】
補正モジュールは、状態値にアクセスし、その状態値を読み込み得、または状態モニタが状態値を補正モジュールに供給することができる。補正モジュールが現在のデバイス状態を判断すると、補正モジュールはブロック530に進む。補正モジュールは、過渡的状態の存在を判断するために状態値を検査し、ここで、過渡的状態は、一般に、その過渡的状態中のセンサの較正が効率的でないかまたは実現可能でないほど短い時間の有効なままである状態を指す。たとえば、過渡的状態の結果として生成された電流スパイクがセンサの出力信号帯域幅に関して短時間の間存在し得、したがって、この過渡的状態のためにセンサの較正は実現可能でない。補正モジュールは、たとえば、過渡的状態の存在を判断するために状態値にマスクを適用することができる。
【0097】
決定ブロック540において、補正モジュールは、少なくとも1つの過渡的状態が存在するかどうかを判断する。少なくとも1つの過渡的状態が存在する場合、補正モジュールは、ブロック542に進み、過渡的状態の発生より前に補正モジュールに供給された有効な補正センサ出力またはセンサ入力値をフリーズさせる。補正モジュールはブロック542からブロック570に進む。代替的に、補正モジュールは、過渡的状態の持続時間の間、無効なまたは場合によっては誤ったセンサ出力の指示を出力することができる。
【0098】
決定ブロック540において、過渡的状態が存在しないと補正モジュールが判断した場合、補正モジュールはブロック550に進む。ブロック550において、補正モジュールは、状態値に基づいて較正値または補正値を判断する。たとえば、補正モジュールは、状態値に基づいて参照表から較正値を取り出すことができる。
【0099】
補正モジュールは、ブロック560に進み、較正値を用いてセンサ出力を補正する。たとえば、補正モジュールは、センサ出力を補正するためにセンサ出力に較正オフセットを加算するように構成され得る。
【0100】
補正モジュールは、ブロック570に進み、補正センサ値を出力する。過渡的状態が存在する場合、補正モジュールは前の補正センサ値を出力する。
【0101】
電子磁気コンパスなどのためのセンサ出力の動的較正は、動的なホストデバイス状態をモニタすることによって実行され得る。センサ出力値を動的に補正するために、較正値がホストデバイス状態に基づいて判断され、センサ出力値に適用され得る。
【0102】
本明細書で説明する方法は、適用例に応じて様々な手段によって実装され得る。たとえば、これらの方法は、ハードウェア、ファームウェア、ソフトウェア、またはそれらの組合せで実装され得る。ハードウェア実装の場合、処理ユニットは、1つまたは複数の特定用途向け集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブル論理デバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子デバイス、本明細書で説明する機能を実行するように設計された他の電子ユニット、またはそれらの組合せの中で実装され得る。
【0103】
ファームウェアおよび/またはソフトウェア実装の場合、本方法は、本明細書で説明する機能を実行するモジュール(たとえば、手順、機能など)を用いて実装され得る。命令を有形に実施するいかなる機械可読媒体も、本明細書で説明する方法の実装において使用され得る。たとえば、ソフトウェアコードは、メモリ中に記憶されるかまたは場合によっては符号化され得、プロセッサによって実行され得る。メモリは、プロセッサの内部またはプロセッサの外部に実装され得る。本明細書で使用する「メモリ」という用語は、長期メモリ、短期メモリ、揮発性メモリ、不揮発性メモリ、または他のメモリのいずれかのタイプを指し、メモリの特定のタイプまたはメモリの数、あるいはメモリが記憶される媒体のタイプに限定されない。
【0104】
1つまたは複数の例示的な実施形態では、説明した機能は、ハードウェア、ソフトウェア、ファームウェア、またはそれらの任意の組合せで実装され得る。ソフトウェアで実装した場合、機能は、1つまたは複数の命令またはコードとしてコンピュータ可読媒体上に記憶され得る。コンピュータ可読媒体は物理的コンピュータ記憶媒体を含む。伝送媒体は物理的伝送媒体を含む。記憶媒体は、コンピュータによってアクセスされ得る任意の利用可能な媒体であり得る。限定ではなく、例として、そのようなコンピュータ可読媒体は、RAM、ROM、EEPROM、CD-ROMまたは他の光ディスク(disk)ストレージ、磁気ディスク(disk)ストレージ、または他の磁気ストレージデバイス、あるいは命令またはデータ構造の形態で所望のプログラムコードを記憶するために使用され得、コンピュータによってアクセスされ得る任意の他の媒体を含むことができ、本明細書で使用するディスク(disk)およびディスク(disc)は、コンパクトディスク(disc)(CD)、レーザディスク(disc)、光ディスク(disc)、デジタル多用途ディスク(disc)(DVD)、フロッピー(登録商標)ディスク(disk)およびブルーレイディスク(disc)を含み、ディスク(disk)は、通常、データを磁気的に再生し、ディスク(disc)は、データをレーザで光学的に再生する。上記の組合せもコンピュータ可読媒体の範囲内に含めるべきである。
【0105】
方法またはプロセスにおける様々なステップまたはアクションは、示された順序で実行され得、または別の順序で実行され得る。さらに、1つまたは複数のプロセスまたは方法ステップが省略され得、あるいは1つまたは複数のプロセスまたは方法ステップが方法およびプロセスに追加され得る。追加のステップ、ブロック、またはアクションが、方法およびプロセスの開始、終了、または介在する既存の要素に追加され得る。
【0106】
開示した実施形態の上記の説明は、当業者が本開示を実施または使用できるように与えたものである。これらの実施形態への様々な修正は当業者には容易に明らかであり、本明細書で定義した一般原理は、本開示の範囲から逸脱することなく他の実施形態に適用され得る。したがって、本開示は、本明細書で示した実施形態に限定されるものではなく、本明細書で開示した原理および新規の特徴に合致する最も広い範囲を与えられるべきである。
【符号の説明】
【0107】
100 モバイルデバイス
102-1 通信アンテナ
102-1 アンテナ
102-2 アンテナ
104 デュプレクサ
110 ワイヤレス通信トランシーバ
110 トランシーバ
114 Global Navigation Satellite System(GNSS)受信機
114 GNSS受信機
122 低雑音増幅器
122 LNA
124 受信ミキサ
126 ベースバンドフィルタ
128 増幅器
128 受信増幅器
130 ベースバンドプロセッサ
142 フィルタ
144 送信増幅器
146 送信ミキサ
148 高出力増幅器
150 局部発振器
152 自動利得制御(AGC)モジュール
152 自動利得制御AGCモジュール
152 AGCモジュール
160 プロセッサ
162 メモリ
164 状態モニタ
170 センサ
172 磁力計
172 電子コンパス
172 電子磁気コンパス
174 補正モジュール
180 ユーザインターフェース
190 電源
192 バッテリー
【特許請求の範囲】
【請求項1】
動的センサ補正の方法であって、
センサ出力値を判断するステップと、
前記センサを有するホストデバイスの動的状態を判断するステップと、
前記センサと前記動的状態とに基づいて較正値を判断するステップと、
補正センサ出力値を生成するために前記センサ出力値に前記較正値を適用するステップと
を含む方法。
【請求項2】
前記センサ出力値を判断するステップが、電子磁気コンパスからの出力値を判断するステップを含む、請求項1に記載の方法。
【請求項3】
前記センサ出力値を判断するステップが、記憶レジスタからセンサ出力値を取り出すステップを含む、請求項1に記載の方法。
【請求項4】
前記動的状態を判断するステップが、Global Navigation Satellite System(GNSS)受信機を有するモバイルデバイスの前記動的状態を判断するステップを含む、請求項1に記載の方法。
【請求項5】
前記動的状態を判断するステップが、ハードウェア状態を判断するステップを含む、請求項1に記載の方法。
【請求項6】
前記動的状態を判断するステップが、ソフトウェア状態を判断するステップを含む、請求項1に記載の方法。
【請求項7】
前記動的状態を判断するステップが、過渡的状態の存在を判断するステップを含む、請求項1に記載の方法。
【請求項8】
前記動的状態を判断するステップが、ワイヤレス通信トランシーバ状態を判断するステップを含む、請求項1に記載の方法。
【請求項9】
前記動的状態を判断するステップが、Global Navigation Satellite System(GNSS)受信機状態を判断するステップを含む、請求項1に記載の方法。
【請求項10】
前記動的状態を判断するステップが、増幅器状態を判断するステップを含む、請求項1に記載の方法。
【請求項11】
前記増幅器状態が増幅器利得状態を含む、請求項10に記載の方法。
【請求項12】
前記動的状態を判断するステップが、ディスプレイバックライト状態を判断するステップを含む、請求項1に記載の方法。
【請求項13】
前記動的状態を判断するステップが、バッテリー充電状態を判断するステップを含む、請求項1に記載の方法。
【請求項14】
前記動的状態を判断するステップが、モバイルデバイス内の状態の組合せを判断するステップを含む、請求項1に記載の方法。
【請求項15】
前記動的状態を判断するステップが、
モバイルデバイス内の複数の状態の各々をモニタするステップと、
前記モニタするステップに基づいて状態表を更新するステップと
を含む、請求項1に記載の方法。
【請求項16】
前記較正値を判断するステップが、較正表から前記動的状態に対応する前記較正値を取り出すステップを含む、請求項1に記載の方法。
【請求項17】
前記較正値を判断するステップが、
前記動的状態における少なくとも1つの過渡的状態の存在を判断するステップと、
前の較正値を維持するステップと
をさらに含む、請求項16に記載の方法。
【請求項18】
前記較正値を判断するステップが、状態モニタによって報告された前記動的状態に対応する複数の較正値から選択するステップをさらに含む、請求項16に記載の方法。
【請求項19】
前記センサ出力値に前記較正値を適用するステップが、前記センサ出力値に前記較正値を加算するステップを含む、請求項1に記載の方法。
【請求項20】
前記センサ出力値に前記較正値を適用するステップが、前のセンサ出力値に前の較正値を加算するステップを含む、請求項1に記載の方法。
【請求項21】
ホストデバイスの動的状態を判断するように構成された状態モニタと、
前記状態モニタに結合された補正モジュールであって、センサ出力値を判断し、前記ホストデバイスの前記状態に基づいて較正を判断し、前記較正と前記ホストデバイスの前記状態とに少なくとも部分的に基づいて補正センサ出力値を出力するように構成された補正モジュールと
を備える動的センサ補正装置。
【請求項22】
前記状態モニタが、モバイルデバイス内の動的ハードウェア状態または動的ソフトウェア状態のうちの少なくとも1つを判断するように構成された、請求項21に記載の装置。
【請求項23】
前記状態モニタが、モバイルデバイス内の複数の状態の各々をモニタし、前記モニタすることに基づいて状態表を更新するように構成された、請求項21に記載の装置。
【請求項24】
較正表
をさらに備え、
前記補正モジュールが、前記状態モニタから前記動的状態を判断し、前記動的状態に基づいて前記較正表から較正値を取り出すように構成された
請求項21に記載の装置。
【請求項25】
前記較正表が、複数の可能な動的状態の各々を対応する較正値にマッピングする、請求項24に記載の装置。
【請求項26】
前記補正モジュールが、前記状態モニタから過渡的状態の存在を判断し、前記過渡的状態の存在下で前記補正センサ出力値を選択的にフリーズさせるように構成された、請求項21に記載の装置。
【請求項27】
前記補正モジュールは、
前記センサ出力値を受信し、記憶するように構成された第1のレジスタと、
前記第1のレジスタに結合された第1の入力と、較正値を受信するように構成された第2の入力とを有する加算器であって、前記加算器の出力が前記補正センサ出力値を与える、加算器と
を備える、請求項21に記載の装置。
【請求項28】
センサ出力値を判断するための手段と、
前記センサを有するホストデバイスの動的状態を判断するための手段と、
前記センサと前記動的状態とに基づいて較正値を判断するための手段と、
補正センサ出力値を生成するために前記センサ出力値に前記較正値を適用するための手段と
を備える動的センサ補正装置。
【請求項29】
前記動的状態を判断するための前記手段が、ハードウェア状態、ソフトウェア状態、ワイヤレス通信トランシーバ状態、Global Navigation Satellite System(GNSS)受信機状態、ディスプレイバックライト状態、自動利得制御(AGC)状態、またはバッテリー充電状態のうちの少なくとも1つを判断するように構成された、請求項28に記載の装置。
【請求項30】
前記動的状態を判断するための前記手段が、
モバイルデバイス内の複数の状態の各々をモニタするための手段と、
前記モニタすることに基づいて状態表を更新するための手段と
を備える、請求項28に記載の装置。
【請求項31】
前記較正値を判断するための前記手段が、
前記動的状態における少なくとも1つの過渡的状態の存在を判断するための手段と、
前の較正値を維持するための手段と
をさらに備える、請求項28に記載の装置。
【請求項32】
プロセッサによって実行されたときに動的センサ補正を実行する1つまたは複数のプロセッサ可読命令がその上に符号化された記憶媒体であって、前記命令が、
センサ出力値を判断するための命令と、
前記センサを有するホストデバイスの動的状態を判断するための命令と、
前記センサと前記動的状態とに基づいて較正値を判断するための命令と、
補正センサ出力値を生成するために前記センサ出力値に前記較正値を適用するための命令と
を含む、記憶媒体。
【請求項33】
前記記憶媒体上に符号化された、前記動的状態を判断するための前記命令が、
ハードウェア状態を判断するための命令、
ソフトウェア状態を判断するための命令、
ワイヤレス通信トランシーバ状態を判断するための命令、
Global Navigation Satellite System(GNSS)受信機状態を判断するための命令、
ディスプレイバックライト状態、自動利得制御(AGC)状態を判断するための命令、または
バッテリー充電状態を判断するための命令
のうちの少なくとも1つを含む、請求項32に記載の記憶媒体。
【請求項1】
動的センサ補正の方法であって、
センサ出力値を判断するステップと、
前記センサを有するホストデバイスの動的状態を判断するステップと、
前記センサと前記動的状態とに基づいて較正値を判断するステップと、
補正センサ出力値を生成するために前記センサ出力値に前記較正値を適用するステップと
を含む方法。
【請求項2】
前記センサ出力値を判断するステップが、電子磁気コンパスからの出力値を判断するステップを含む、請求項1に記載の方法。
【請求項3】
前記センサ出力値を判断するステップが、記憶レジスタからセンサ出力値を取り出すステップを含む、請求項1に記載の方法。
【請求項4】
前記動的状態を判断するステップが、Global Navigation Satellite System(GNSS)受信機を有するモバイルデバイスの前記動的状態を判断するステップを含む、請求項1に記載の方法。
【請求項5】
前記動的状態を判断するステップが、ハードウェア状態を判断するステップを含む、請求項1に記載の方法。
【請求項6】
前記動的状態を判断するステップが、ソフトウェア状態を判断するステップを含む、請求項1に記載の方法。
【請求項7】
前記動的状態を判断するステップが、過渡的状態の存在を判断するステップを含む、請求項1に記載の方法。
【請求項8】
前記動的状態を判断するステップが、ワイヤレス通信トランシーバ状態を判断するステップを含む、請求項1に記載の方法。
【請求項9】
前記動的状態を判断するステップが、Global Navigation Satellite System(GNSS)受信機状態を判断するステップを含む、請求項1に記載の方法。
【請求項10】
前記動的状態を判断するステップが、増幅器状態を判断するステップを含む、請求項1に記載の方法。
【請求項11】
前記増幅器状態が増幅器利得状態を含む、請求項10に記載の方法。
【請求項12】
前記動的状態を判断するステップが、ディスプレイバックライト状態を判断するステップを含む、請求項1に記載の方法。
【請求項13】
前記動的状態を判断するステップが、バッテリー充電状態を判断するステップを含む、請求項1に記載の方法。
【請求項14】
前記動的状態を判断するステップが、モバイルデバイス内の状態の組合せを判断するステップを含む、請求項1に記載の方法。
【請求項15】
前記動的状態を判断するステップが、
モバイルデバイス内の複数の状態の各々をモニタするステップと、
前記モニタするステップに基づいて状態表を更新するステップと
を含む、請求項1に記載の方法。
【請求項16】
前記較正値を判断するステップが、較正表から前記動的状態に対応する前記較正値を取り出すステップを含む、請求項1に記載の方法。
【請求項17】
前記較正値を判断するステップが、
前記動的状態における少なくとも1つの過渡的状態の存在を判断するステップと、
前の較正値を維持するステップと
をさらに含む、請求項16に記載の方法。
【請求項18】
前記較正値を判断するステップが、状態モニタによって報告された前記動的状態に対応する複数の較正値から選択するステップをさらに含む、請求項16に記載の方法。
【請求項19】
前記センサ出力値に前記較正値を適用するステップが、前記センサ出力値に前記較正値を加算するステップを含む、請求項1に記載の方法。
【請求項20】
前記センサ出力値に前記較正値を適用するステップが、前のセンサ出力値に前の較正値を加算するステップを含む、請求項1に記載の方法。
【請求項21】
ホストデバイスの動的状態を判断するように構成された状態モニタと、
前記状態モニタに結合された補正モジュールであって、センサ出力値を判断し、前記ホストデバイスの前記状態に基づいて較正を判断し、前記較正と前記ホストデバイスの前記状態とに少なくとも部分的に基づいて補正センサ出力値を出力するように構成された補正モジュールと
を備える動的センサ補正装置。
【請求項22】
前記状態モニタが、モバイルデバイス内の動的ハードウェア状態または動的ソフトウェア状態のうちの少なくとも1つを判断するように構成された、請求項21に記載の装置。
【請求項23】
前記状態モニタが、モバイルデバイス内の複数の状態の各々をモニタし、前記モニタすることに基づいて状態表を更新するように構成された、請求項21に記載の装置。
【請求項24】
較正表
をさらに備え、
前記補正モジュールが、前記状態モニタから前記動的状態を判断し、前記動的状態に基づいて前記較正表から較正値を取り出すように構成された
請求項21に記載の装置。
【請求項25】
前記較正表が、複数の可能な動的状態の各々を対応する較正値にマッピングする、請求項24に記載の装置。
【請求項26】
前記補正モジュールが、前記状態モニタから過渡的状態の存在を判断し、前記過渡的状態の存在下で前記補正センサ出力値を選択的にフリーズさせるように構成された、請求項21に記載の装置。
【請求項27】
前記補正モジュールは、
前記センサ出力値を受信し、記憶するように構成された第1のレジスタと、
前記第1のレジスタに結合された第1の入力と、較正値を受信するように構成された第2の入力とを有する加算器であって、前記加算器の出力が前記補正センサ出力値を与える、加算器と
を備える、請求項21に記載の装置。
【請求項28】
センサ出力値を判断するための手段と、
前記センサを有するホストデバイスの動的状態を判断するための手段と、
前記センサと前記動的状態とに基づいて較正値を判断するための手段と、
補正センサ出力値を生成するために前記センサ出力値に前記較正値を適用するための手段と
を備える動的センサ補正装置。
【請求項29】
前記動的状態を判断するための前記手段が、ハードウェア状態、ソフトウェア状態、ワイヤレス通信トランシーバ状態、Global Navigation Satellite System(GNSS)受信機状態、ディスプレイバックライト状態、自動利得制御(AGC)状態、またはバッテリー充電状態のうちの少なくとも1つを判断するように構成された、請求項28に記載の装置。
【請求項30】
前記動的状態を判断するための前記手段が、
モバイルデバイス内の複数の状態の各々をモニタするための手段と、
前記モニタすることに基づいて状態表を更新するための手段と
を備える、請求項28に記載の装置。
【請求項31】
前記較正値を判断するための前記手段が、
前記動的状態における少なくとも1つの過渡的状態の存在を判断するための手段と、
前の較正値を維持するための手段と
をさらに備える、請求項28に記載の装置。
【請求項32】
プロセッサによって実行されたときに動的センサ補正を実行する1つまたは複数のプロセッサ可読命令がその上に符号化された記憶媒体であって、前記命令が、
センサ出力値を判断するための命令と、
前記センサを有するホストデバイスの動的状態を判断するための命令と、
前記センサと前記動的状態とに基づいて較正値を判断するための命令と、
補正センサ出力値を生成するために前記センサ出力値に前記較正値を適用するための命令と
を含む、記憶媒体。
【請求項33】
前記記憶媒体上に符号化された、前記動的状態を判断するための前記命令が、
ハードウェア状態を判断するための命令、
ソフトウェア状態を判断するための命令、
ワイヤレス通信トランシーバ状態を判断するための命令、
Global Navigation Satellite System(GNSS)受信機状態を判断するための命令、
ディスプレイバックライト状態、自動利得制御(AGC)状態を判断するための命令、または
バッテリー充電状態を判断するための命令
のうちの少なくとも1つを含む、請求項32に記載の記憶媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2013−510317(P2013−510317A)
【公表日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2012−537967(P2012−537967)
【出願日】平成22年11月3日(2010.11.3)
【国際出願番号】PCT/US2010/055300
【国際公開番号】WO2011/066073
【国際公開日】平成23年6月3日(2011.6.3)
【出願人】(507364838)クアルコム,インコーポレイテッド (446)
【Fターム(参考)】
【公表日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成22年11月3日(2010.11.3)
【国際出願番号】PCT/US2010/055300
【国際公開番号】WO2011/066073
【国際公開日】平成23年6月3日(2011.6.3)
【出願人】(507364838)クアルコム,インコーポレイテッド (446)
【Fターム(参考)】
[ Back to top ]