
モーションキャプチャ装置およびモーションキャプチャプログラム
【課題】被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供する。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被測定者の動作、特に被測定者の口内における舌の動きを計測するモーションキャプチャ装置およびモーションキャプチャプログラムに関する。
【背景技術】
【0002】
従来、例えば手話をCGアニメーションで表現する技術を開発するため、手話を演じる人の動作を計測してデータを集めることが行われている。このような人体の動作の計測法はモーションキャプチャと呼ばれ、各種の手法が提案されているが、現在では計測精度や被測定者の負担や手間等のバランスの観点から、光学式モーションキャプチャが主流となっている。この光学式モーションキャプチャは、人体表面に再帰性反射材からなる光学マーカを貼付し、適切な照明(被測定者の視覚を妨害しないように近赤外光源をカメラレンズと同軸に設置して用いることが多い)の下で、当該光学マーカを付けた人物を複数のモーションキャプチャ用カメラ(撮影装置)で撮影し、画像解析によって各々の光学マーカの位置を算出するものである。
【0003】
手話では、人間の顔の表情で文法的な要素を表現することがあるため、手指の動作に加えて顔面のモーションキャプチャも必要である。この場合も被測定者の顔表面に光学マーカをつけて手話を演じてもらい、それを撮影してモーションキャプチャを行う。ここで、手話に必要な表情の中には、舌を用いるものもあるが、被測定者の口内における舌の位置を外部から光学的に計測することはできない。例えば、被測定者の舌に再帰性反射材の光学マーカを付けておけば、舌を出した時にその光学マーカを撮影することはできるが、この場合、常時見えている顔表面の光学マーカと、現れたり消えたりする舌の光学マーカとの対応関係を計算することが困難となる。
【0004】
このような被測定者が口を閉じている場合の舌の動きの計測には、磁気を利用する方法が提案され、言語学研究等に用いられている。例えば、ゲッチンゲン大学で考案されたシステムはEMA(ElectroMagnetic Articulograph)、マサチューセッツ工科大学(MIT)で考案されたシステムはEMMA(ElectroMagnetic Midsagittal Articulometer)と称される。このうち、ゲッチンゲン大学のシステムはドイツのCarstens社が製造および販売しており、一般にはEMAの名で呼ばれることが多い(非特許文献1)。
【0005】
また、被測定者の舌の上に微小な永久磁石(磁気ソース)を貼付し、ホール素子からなる磁気センサが被測定者の頭部に対して固定された位置(一定の位置)となるように、装具等を用いて被測定者の頭部に磁気センサを固定する手法も提案されている(非特許文献2)。またその他にも、光ファイバから被測定者の口内にレーザを照射し、その散乱光から舌の位置を計測するシステムも提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許3722987号公報
【非特許文献】
【0007】
【非特許文献1】“Brochure-AG500”、Carstens社、[平成23年7月26日検索]、インターネット<URL:http://www.articulograph.de/images/brochure.pdf >
【非特許文献2】C. Dromey et. al.,“Measuring tongue movements during speech”,Adaptation of a magnetic jaw-tracking system,Speech Communication,Vol.48,PP.463−473,2006
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、非特許文献1において提案されたEMAによる舌の位置の計測法では、被測定者の近傍に複数のコイルを固定し、被測定者はそのコイルによって形成された磁場が及ぶ範囲内で手話等の演技を行う必要があった。また、非特許文献2において提案された手法は、前記したように被測定者の頭部に大きな装具を装着し、被測定者の頭部に対するセンサの相対位置を固定する必要があった。
【0009】
ここで、通常の言語現象に伴う舌の動きの計測であれば、非特許文献1,2の手法でも問題は少ないが、例えば手話の動作に伴って生じる舌の動きを計測しようとすると、手や腕の動作が伴い、またそれに応じて被測定者の上体も動くことがある。従って、非特許文献1,2の手法では、被測定者の身体のすぐ傍に置かれたコイルやその支持装置、あるいは被測定者の頭部に装着した装具が動作の障害になる可能性があり、被測定者の動作の制約が大きいという問題があった。
【0010】
また、特許文献1で提案された技術は、被測定者が舌を口外に出してしまうと計測できないという問題があった。なお、音声学の研究等では、前記した手法の他にもX線撮影、MRI、超音波スキャナ等で舌の動きを計測した報告もあるが、いずれも被測定者の負担が大きいか、あるいは被測定者の身体が強く拘束されるため、手話等の計測対象には不向きであった。
【0011】
本発明はかかる点に鑑みてなされたものであって、被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供することを課題とする。
【課題を解決するための手段】
【0012】
前記課題を解決するために請求項1に係るモーションキャプチャ装置は、被測定者の顔表面または舌表面の一方に貼付される磁気ソースと、被測定者の顔表面または舌表面の他方に貼付され、磁気ソースによって形成される磁場を検出する磁気センサと、被測定者の顔表面に貼付された磁気ソースまたは前記磁気センサと同一の位置に配置された光学マーカと、この光学マーカを異なる位置および異なる方向から撮影する複数の撮影装置と、磁気センサによって検出された磁場と、撮影装置によって撮影された画像とから、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの座標を算出する座標算出手段と、からなり、この座標算出手段が、第1相対座標算出手段と、第2絶対座標算出手段と、第1絶対座標算出手段と、を備える構成とした。
【0013】
このような構成によれば、モーションキャプチャ装置は、第1相対座標算出手段によって、磁気センサによって検出された磁場の大きさから、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの相対的な座標を示す第1相対座標を算出する。また、モーションキャプチャ装置は、第2絶対座標算出手段によって、複数の撮影装置によって撮影された光学マーカの画像から、当該光学マーカと同一の位置に配置された磁気ソースまたは磁気センサの絶対的な座標を示す第2絶対座標を算出する。また、モーションキャプチャ装置は、第1絶対座標算出手段によって、第1相対座標に第2絶対座標を加算することで、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの絶対的な座標を示す第1絶対座標を算出する。
【0014】
これにより、モーションキャプチャ装置は、第1相対座標算出手段によって、磁気式モーションキャプチャ技術を用いて被測定者の舌表面(口内)に貼付された磁気ソースまたは磁気センサの相対位置を算出し、第2絶対座標算出手段によって、光学式モーションキャプチャ技術を用いて被測定者の顔表面に貼付された磁気ソースまたは磁気センサの絶対位置を算出する。そして、モーションキャプチャ装置は、第1絶対座標算出手段によって両者を加算することで、計測中に被測定者の表情が変化した場合であっても、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの正確な絶対位置を算出することができる。
【0015】
なお、第1相対座標とは、被測定者の顔表面に貼付された磁気センサからみた被測定者の舌表面に貼付された磁気ソースの相対的な位置、あるいは、被測定者の顔表面に貼付された磁気ソースからみた被測定者の舌表面に貼付された磁気センサの相対的な位置のことを意味している。また、第1絶対座標とは、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの絶対的な位置のことを、第2絶対座標とは、被測定者の顔表面に貼付された磁気ソースまたは磁気センサの絶対的な位置のことを意味している。
【0016】
また、請求項2に係るモーションキャプチャ装置は、請求項1に係るモーションキャプチャ装置において、磁気ソースが電磁石からなるとともに、被測定者の顔表面または舌表面に複数貼付され、磁気センサが被測定者の顔表面または舌表面に複数貼付され、複数の磁気ソースのそれぞれには、異なる周波数の励磁電流が供給され、第1相対座標算出手段が、磁気センサによって検出された複数の磁場のそれぞれについて周波数分離を行うことで、各々の磁気ソースによって形成される磁場を分離し、当該分離された磁場の大きさから前記第1相対座標を算出する構成とした。
【0017】
これにより、モーションキャプチャ装置は、被測定者の顔表面または舌表面に電磁石からなる磁気ソースが複数貼付されことで、磁気センサによって検出した磁場に複数の磁気ソースからの誘導成分が含まれている場合であっても、それぞれの磁気ソースに異なる周波数の励磁電流を供給し、かつ、磁気センサによって検出した磁場について高速フーリエ変換等による周波数分離を行うことで、磁気ソースごとの磁場成分を分離することができる。
【0018】
また、請求項3に係るモーションキャプチャ装置は、請求項1または請求項2に係るモーションキャプチャ装置において、法線方向決定手段を備える構成とした。
【0019】
このような構成によれば、モーションキャプチャ装置は、法線方向決定手段によって、被測定者の顔表面の法線方向をモデル化した被測定者の頭部モデルに第2絶対座標を当てはめることで、当該第2絶対座標に対応する磁気ソースまたは磁気センサの前記被測定者の顔表面に対する法線方向を決定する。これを受けて、モーションキャプチャ装置は、第1相対座標算出手段によって、磁気センサによって検出された磁場の大きさと、磁気センサまたは磁気ソースの法線方向とから、第1相対座標を算出する。
【0020】
これにより、モーションキャプチャ装置は、被測定者の顔表面の法線方向をモデル化した頭部モデルを用いることで磁気ソースまたは磁気センサ40の被測定者Mの顔表面に対する法線方向を決定することができ、当該法線方向を加味して第1相対座標を算出することができる。
【0021】
また、請求項4に係るモーションキャプチャ装置は、請求項1から請求項3のいずれか一項に係るモーションキャプチャ装置において、磁気ソースが被測定者の舌表面に貼付されるとともに、磁気センサが被測定者の顔表面に貼付され、第1相対座標算出手段が、磁気センサによって検出された磁場の大きさから、被測定者の舌表面に貼付された磁気ソースの第1相対座標を算出し、第2絶対座標算出手段が、複数の撮影装置によって撮影された光学マーカの画像から、当該光学マーカと同一の位置に配置された磁気センサの第2絶対座標を算出し、第1絶対座標算出手段が、第1相対座標に第2絶対座標を加算することで、被測定者の舌表面に貼付された磁気ソースの第1絶対座標を算出する構成とした。
【0022】
これにより、モーションキャプチャ装置は、磁気ソースを被測定者の舌表面に貼付し、磁気センサを被測定者の顔表面に貼付した場合において、計測中に被測定者の表情が変化した場合であっても、被測定者の舌表面に貼付された磁気ソースの正確な絶対位置を算出することができる。
【0023】
また、請求項5に係るモーションキャプチャ装置は、請求項4に係るモーションキャプチャ装置において、被測定者の舌表面に配置された磁気ソースに一端が接続され、他端が被測定者の口外に露出された所定長さの紐部材を備え、磁気ソースが永久磁石からなるとともに、当該磁気ソースに紐部材の一端が接続される構成とした。
【0024】
これにより、モーションキャプチャ装置は、被測定者の舌表面、すなわち口内に磁気ソースである永久磁石を貼付した際に、当該永久磁石と接続された紐部材の一部が口外に露出して口外にある支持部材等に接続されていることにより、その紐部材をすぐに手指で掴むことができる状態にある。
【0025】
また、請求項6に係るモーションキャプチャ装置は、請求項1から請求項3のいずれか一項に係るモーションキャプチャ装置において、磁気ソースが被測定者の顔表面に貼付されるとともに、磁気センサが被測定者の舌表面に貼付され、第1相対座標算出手段が、磁気センサによって検出された磁場の大きさから、被測定者の舌表面に貼付された磁気センサの第1相対座標を算出し、第2絶対座標算出手段が、複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された磁気ソースの第2絶対座標を算出し、第1絶対座標算出手段が、第1相対座標に前記第2絶対座標を加算することで、被測定者の舌表面に貼付された磁気センサの第1絶対座標を算出する構成とした。
【0026】
これにより、モーションキャプチャ装置は、磁気センサを被測定者の舌表面に貼付し、磁気ソースを被測定者の顔表面に貼付した場合において、計測中に被測定者の表情が変化した場合であっても、被測定者の舌表面に貼付された磁気センサの正確な絶対位置を算出することができる。
【0027】
前記課題を解決するためにモーションキャプチャプログラムは、被測定者の顔表面または舌表面の一方に貼付される磁気ソースと、被測定者の顔表面または舌表面の他方に貼付され、磁気ソースによって形成される磁場を検出する磁気センサと、顔表面に貼付された磁気ソースまたはセンサと同一の位置に配置された光学マーカと、光学マーカを異なる位置および異なる方向から撮影する複数の撮影装置と、からなるモーションキャプチャ装置において、磁気センサによって検出された磁場と、撮影装置によって撮影された画像とから、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの座標を算出するために、コンピュータを、第1相対座標算出手段、第2絶対座標算出手段、第1絶対座標算出手段、として機能させるための構成とした。
【0028】
このような構成によれば、モーションキャプチャプログラムは、第1相対座標算出手段によって、磁気センサによって検出された磁場の大きさから、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの相対的な座標を示す第1相対座標を算出する。また、モーションキャプチャ装置は、第2絶対座標算出手段によって、複数の撮影装置によって撮影された光学マーカの画像から、当該光学マーカと同一の位置に配置された磁気ソースまたは磁気センサの絶対的な座標を示す第2絶対座標を算出する。また、モーションキャプチャ装置は、第1絶対座標算出手段によって、第1相対座標に第2絶対座標を加算することで、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの絶対的な座標を示す第1絶対座標を算出する。
【0029】
これにより、モーションキャプチャプログラムは、第1相対座標算出手段によって、磁気式モーションキャプチャ技術を用いて被測定者の舌表面(口内)に貼付された磁気ソースまたは磁気センサの相対位置を算出し、第2絶対座標算出手段によって、光学式モーションキャプチャ技術を用いて被測定者の顔表面に貼付された磁気ソースまたは磁気センサの絶対位置を算出する。そして、モーションキャプチャプログラムは、第1絶対座標算出手段によって両者を加算することで、計測中に被測定者の表情が変化した場合であっても、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの正確な絶対位置を算出することができる。
【発明の効果】
【0030】
請求項1および請求項7に係る発明によれば、被測定者の動作の制約が少ない状態で被測定者の舌の動きを計測することができるため、例えば手話研究の発展に資するモーションキャプチャ装置およびモーションキャプチャプログラムを提供することができる。また 請求項1および請求項7に係る発明によれば、従来手法よりも多数のセンサによって近距離から被測定者の舌の動きを計測できるため、計測精度の向上や、言語学研究等への応用も期待できる。
【0031】
請求項2に係る発明によれば、複数の磁気ソースまたは複数の磁気センサを被測定者の舌表面に貼付した場合であっても、それぞれの磁気ソースまたは磁気センサを特定(識別)し、その相対座標を正確に算出することができるため、被測定者の舌の動きを正確に計測することができる。
【0032】
請求項3に係る発明によれば、被測定者の表情の変化に伴って磁気ソースまたは磁気センサの被測定者の顔表面に対する法線方向が変化し、磁気センサの出力が変化した場合であっても、被測定者の舌の動きを正確に計測することができる。
【0033】
請求項4に係る発明によれば、顔表面よりも面積が小さい舌表面に磁気ソースを貼付することにより、顔表面に磁気ソースを貼付する場合よりも磁気ソースの数を減らして当該磁気ソースに供給する励磁電流の供給量を少なくすることができるため、計測の際のコストを低減することができる。
【0034】
請求項5に係る発明によれば、被測定者の舌表面に貼付される磁気ソースが永久磁石からなる場合であっても、紐部材を備えているため、被測定者が当該永久磁石を誤って飲み込むことを防止することができ、被測定者の舌の動きを安全に計測することができる。
【0035】
請求項6に係る発明によれば、被測定者の湿った口内(舌表面)に励磁電流が供給される磁気ソースを貼付する必要がないため、磁気ソースを舌表面に貼付する場合よりも被測定者の舌の動きを安全に計測することができる。
【図面の簡単な説明】
【0036】
【図1】本発明の実施形態に係るモーションキャプチャ装置の全体構成を示す概略図である。
【図2】本発明の実施形態に係るモーションキャプチャ装置における被測定者の舌表面への磁気ソースの貼付例を示す概略図である。
【図3】本発明の実施形態に係るモーションキャプチャ装置における被測定者の顔表面への磁気センサの貼付例を示す概略図である。
【図4】本発明の実施形態に係るモーションキャプチャ装置における座標算出手段の内部構成を示すブロック図である。
【図5】本発明の実施形態に係るモーションキャプチャ装置の動作を示すフローチャートである。
【図6】本発明の他の実施形態に係るモーションキャプチャ装置における座標算出手段の内部構成を示すブロック図である。
【図7】本発明の他の実施形態に係るモーションキャプチャ装置の動作を示すフローチャートである。
【図8】本発明の他の実施形態に係るモーションキャプチャ装置の全体構成を示す概略図である。
【発明を実施するための形態】
【0037】
本発明の実施形態に係るモーションキャプチャ装置について、図面を参照しながら説明する。なお、以下の説明において、同一の構成については同一の名称及び符号を付し、詳細説明を省略する。
【0038】
[第1実施形態]
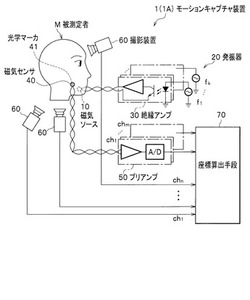
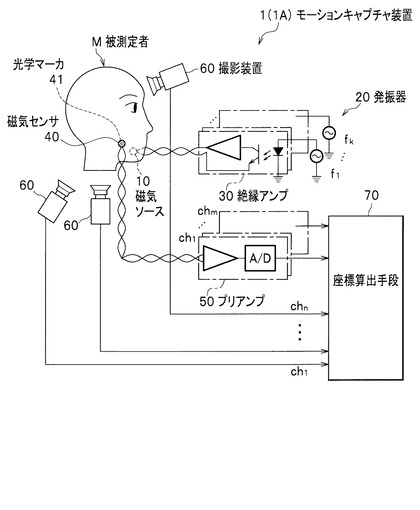
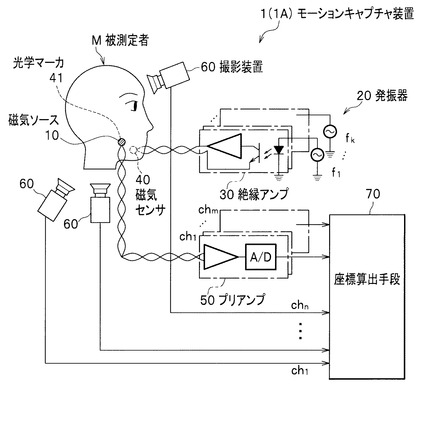
以下、第1実施形態に係るモーションキャプチャ装置1の構成について、図1〜図4を参照しながら詳細に説明する。モーションキャプチャ装置1は、図1に示すように、被測定者Mの舌の動きを計測するものである。モーションキャプチャ装置1は、ここでは図1に示すように、磁気ソース10と、発振器20と、絶縁アンプ30と、磁気センサ40と、光学マーカ41と、プリアンプ50と、撮影装置60と、座標算出手段70と、を備えている。
【0039】
磁気ソース10は、磁場を発生させるものである。磁気ソース10は、例えば微小なコイルからなる電磁石や、微小な永久磁石等により構成され、被測定者Mの舌表面または顔表面に貼付される。また、磁気ソース10は、被測定者Mの舌表面または顔表面に貼付される際の厚さを極力薄くするために、一軸のものを用いることが好ましい。なお、このように一軸の磁気ソース10を用いた場合、当該磁気ソース10の三次元座標(後記する第1相対座標)は、少なくとも3つの磁気センサ40によって検出された磁場を用いて算出する。
【0040】
ここで、以下の説明では、磁気ソース10として電磁石を用い、図1に示すように、当該磁気ソース10が被測定者Mの舌表面に貼付される例について説明する。このように被測定者Mの舌表面に貼付された磁気ソース10は、図1に示すように、絶縁アンプ30を介して発振器20に接続されており、当該発振器20から所定の周波数の励磁電流が供給されて磁場を発生できるように構成されている。
【0041】
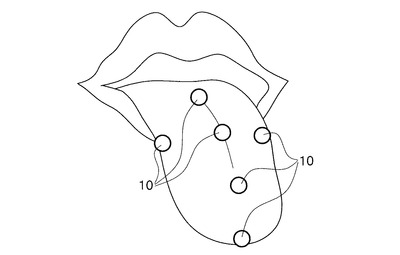
磁気ソース10は、具体的には図2に示すように、被測定者Mの舌表面の所定位置に所定個数貼付される。磁気ソース10は、ここでは図2に示すように、被測定者Mの舌表面に十字状に6個配置されている。但し、磁気ソース10の配置位置および個数は、計測対象や計測条件等によって異なるため、図2に示す例に限定されない。例えば、被測定者Mの舌が口内または口外のどちらにあるかということのみを計測する場合、磁気ソース10は被測定者Mの舌表面に1個のみ貼付されても構わない。磁気ソース10は、例えば医療用に用いられる口内用の接着剤を用いて被測定者Mの舌表面に貼付される。
【0042】
ここで、被測定者Mの舌表面に配置される磁気ソース10の数は、図2および図3に示すように、被測定者Mの顔表面に配置される磁気センサ40の数よりも少なくなるように構成される。これにより、モーションキャプチャ装置1は、被測定者Mの顔表面よりも面積が小さい舌表面に磁気ソース10を貼付することにより、被測定者Mの顔表面に磁気ソース10を貼付する場合よりも磁気ソース10の数を減らして当該磁気ソース10に供給する励磁電流の供給量を少なくすることができるため、計測の際のコストを低減することができる。
【0043】
また、磁気ソース10としては、前記したように微小な永久磁石を用いることもできる。この場合、モーションキャプチャ装置1において発振器20や絶縁アンプ30が不要となるため、被測定者Mの動作の制約がより少なくなるという利点がある。但し、被測定者Mの舌表面に貼付する磁気ソース10として永久磁石を用いる場合は、当該磁気ソース10に一端が接続され、他端が被測定者Mの口外に露出された所定長さの紐部材(図示省略)を備えることが好ましい。
【0044】
これにより、被測定者Mの舌表面、すなわち口内に磁気ソース10である永久磁石を貼付した際に、当該永久磁石と接続された紐部材の一部が口外に露出して口外にある支持部材等に接続されていることにより、その紐部材をすぐに手指で掴むことができる状態にある。そのため、被測定者Mの舌表面に貼付される磁気ソース10が永久磁石からなる場合であっても、紐部材を備えているため、被測定者Mが当該永久磁石を誤って飲み込むことを防止することができ、被測定者Mの舌の動きを安全に計測することができる。なお、この紐部材の素材は、細く柔軟であり被測定者Mの舌や唇の動きを阻害しないものであれば、特に限定されない。すなわち、紐部材は、例えば繊維や金属等で構成しても構わない。
【0045】
発振器20は、磁気ソース10に対して励磁電流を供給するものである。発振器20は、例えばファンクションジェネレータ等によって構成され、図1に示すように、絶縁アンプ30に接続されている。そして、発振器20は、当該絶縁アンプ30を介して被測定者Mの舌表面に貼付された磁気ソース10に所定の周波数の正弦波を発振することで励磁電流を供給する。なお、発振器20は、磁気ソース10を電磁石で構成した場合に必要となり、磁気ソース10を永久磁石で構成した場合は不要となる。
【0046】
発振器20は、図2に示すように、磁気ソース10が電磁石で構成されるとともに被測定者Mの舌表面に複数貼付された場合、図1に示すように、当該磁気ソース10の個数に合わせて複数設け、複数の磁気ソース10のそれぞれに異なる周波数(f1〜fk(kは磁気ソース10および発振器20の数))の励磁電流を供給することが好ましい。これにより、複数の磁気ソース10を用いた場合であっても、後記する座標算出手段70において、それぞれの磁気ソース10によって形成された磁場成分を分離することができる。
【0047】
絶縁アンプ30は、発振器20から発振された励磁電流を増幅するものである。絶縁アンプ30は、入力部と出力部間が絶縁され、電池駆動できるように構成されている。アンプとして絶縁アンプ30を用いるのは、測定者Mの口内という湿った部位に貼付された磁気ソース10に励磁電流を供給するための安全上の理由からである。従って、本実施形態の構成とは逆に、被測定者Mの舌表面に磁気センサ40を貼付した場合や、磁気ソース10として永久磁石で構成した場合、絶縁アンプは不要となる。
【0048】
絶縁アンプ30は、図1に示すように、被測定者Mの舌表面に貼付された磁気ソース10と、例えば細く柔軟な撚り対線等によって接続される。これにより、被測定者Mの舌や唇等の動きが阻害されることを防止することができる。なお、絶縁アンプ30は、図2に示すように、磁気ソース10が電磁石で構成されるとともに被測定者Mの舌表面に複数貼付された場合、図1に示すように、当該磁気ソース10の個数に合わせて複数設け、複数の磁気ソース10のそれぞれに増幅した励磁電流を供給する。
【0049】
磁気センサ40は、磁場を検出するものである。磁気センサ40は、例えば微小なコイル、ホール素子、磁気抵抗素子等により構成され、被測定者Mの舌表面または顔表面に貼付される。また、磁気センサ40は、被測定者Mの舌表面または顔表面に貼付される際の厚さを極力薄くするために、一軸のものを用いることが好ましい。
【0050】
ここで、以下の説明では、図1に示すように、磁気センサ40は被測定者Mの顔表面に貼付される例について説明する。このように被測定者Mの顔表面に貼付された磁気センサ40は、図1に示すように、プリアンプ50を介して座標算出手段70に接続されており、検出した磁場の大きさを示す磁気センサ信号を座標算出手段70に出力できるように構成されている。なお、この磁気センサ信号は、磁場を検出した時刻を示すタイムコードとともに記録される(図示省略)。
【0051】
磁気センサ40は、具体的には図3に示すように、被測定者Mの顔表面の所定位置に所定個数貼付される。磁気センサ40は、ここでは図3に示すように、被測定者Mの顔表面において、当該被測定者Mが顔の表情を変化させた場合における変化が顕著な部位(特徴点)に沿って配置される。これは、後記するように、磁気センサ40と同一の位置に、光学モーションキャプチャ用の光学マーカ41が配置されるためである。但し、磁気センサ40の配置位置および個数は、計測対象および計測条件等によって異なるため、図3に示す例に限定されない。ここで、被測定者Mの顔表面に配置される磁気センサ40の数は、図2および図3に示すように、被測定者Mの舌表面に配置される磁気センサ40の数よりも多くなるように構成される。
【0052】
光学マーカ41は、光学モーションキャプチャにおける指標となるものである。光学マーカ41は、例えば再帰性反射材からなり、図1および図3に示すように、磁気センサ40と同一の位置に配置される。光学マーカ41は、より具体的には被測定者Mの顔表面に貼付された磁気センサ40の上(表面)に貼付される。この光学マーカ41の周囲には、図1に示すように、複数の撮影装置60と、光学式モーションキャプチャ用の照明光源(図示省略)とが配置されており、当該複数の撮影装置60によって撮影された光学マーカ41を含む被測定者Mの画像を座標算出手段70に出力できるように構成されている。
【0053】
光学マーカ41は、具体的には図3に示すように、被測定者Mの顔表面の所定位置に所定個数貼付される。また、光学マーカ41と同一の位置には、図3に示すように、磁気センサ40が配置される。但し、光学マーカ41の配置位置および個数は、計測対象および計測条件等によって異なるため、図3に示す例に限定されない。また、光学マーカ41は、図3に示す例では磁気センサ40と同数配置されているが、磁気センサ40と必ずしも同数でなくてもよく、当該磁気センサ40よりも多くても構わない。
【0054】
プリアンプ50は、磁気センサ40が生成した磁気センサ信号を増幅するものである。また、プリアンプ50は、図1に示すように、増幅した磁気センサ信号をA/D変換する機能も同時に備えている。プリアンプ50は、図1に示すように、被測定者Mの顔表面に貼付された磁気センサ40と、例えば細く柔軟な撚り対線等によって接続される。これにより、被測定者Mの表情の動きが阻害されることを防止することができる。なお、プリアンプ50は、図3に示すように、磁気センサ40が被測定者Mの顔表面に複数貼付された場合、図1に示すように、当該磁気センサ40の個数に合わせて複数設け、増幅およびA/D変換したそれぞれの磁気センサ信号を座標算出手段70に出力する。
【0055】
撮影装置60は、被測定者Mの顔表面に貼付された光学マーカ41を撮影するものである。撮影装置60は、例えば光学式モーションキャプチャ用のビデオカメラを用いることができる。また、撮影装置60は、図1に示すように、被測定者Mの顔表面に貼付された光学マーカ41を異なる位置および方向から撮影できるように、複数設置される。なお、図1に示す例では、撮影装置60を3台のみ図示したが、撮影装置60の台数はこれに限定されない。撮影装置60は、図1に示すように、撮影した光学マーカ41を含む被測定者Mの頭部の画像データを座標算出手段70に出力する。なお、この画像データには、当該画像を撮影した時刻を示すタイムコードが対応づけられている(図示省略)。
【0056】
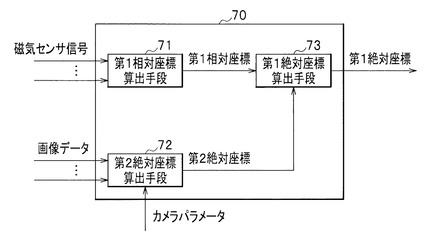
座標算出手段70は、磁気センサ40によって検出された磁場と、撮影装置60によって撮影された画像とを利用して、磁気ソース10の座標を算出するものである。座標算出手段70は、ここでは図4に示すように、第1相対座標算出手段71と、第2絶対座標算出手段72と、第1絶対座標算出手段73と、を備えている。
【0057】
第1相対座標算出手段71は、被測定者Mの舌表面に貼付された磁気ソース10の相対座標を算出するものである。ここで、磁気ソース10の相対座標(第1相対座標)とは、被測定者Mの顔表面に貼付された磁気センサ40を基準とした磁気ソース10の相対的な位置のことを意味している。なお、第1相対座標は、被測定者Mの舌表面に貼付されているものによって意味合いが異なり、例えば本実施形態とは逆に被測定者Mの舌表面に磁気センサ40が貼付されている場合は、磁気ソース10を基準とした磁気センサ40の相対的な位置が第1相対座標となる。
【0058】
第1相対座標算出手段71は、図4に示すように、磁気センサ40から入力された磁気センサ信号に含まれる磁場の大きさから、当該磁場を形成する磁気ソース10の相対座標を算出する。第1相対座標算出手段71は、前記したように、磁気ソース10および磁気センサ40が一軸のものである場合、1つの磁気ソース10に対して、任意に選択した3つの磁気センサ40によって検出された磁場を合成することで、当該磁気ソース10の三次元の相対座標を算出する。ここで、第1相対座標算出手段71における相対座標の算出処理は、一般的な磁気式モーションキャプチャと同様であるため、詳細な説明は省略する。
【0059】
第1相対座標算出手段71は、磁気ソース10が電磁石からなり、図2および図3に示すように、被測定者Mの舌表面および顔表面に磁気ソース10および磁気センサ40がそれぞれ複数貼付された場合、各磁気センサ40によって検出された複数の磁場のそれぞれについて周波数分離を行うことが好ましい。この周波数分離の手法としては、高速フーリエ変換(FFT)が挙げられるが、例えばアナログ領域においてフィルタで分離する方法等、FFT以外の周波数解析手法を用いても構わない。
【0060】
すなわち、被測定者Mの舌表面に磁気ソース10が複数貼付された場合、磁気センサ40によって検出された磁場に基づいて第1相対座標算出手段71に入力される磁気センサ信号には、被測定者Mの舌表面に貼付された全ての磁気ソース10からの誘導成分が含まれている。しかしながら、複数の磁気ソース10には、前記したように発振器20からそれぞれ異なる周波数(f1〜fk(kは磁気ソース10および発振器20の数))の励磁電流が供給されている。従って、磁気センサによって検出した磁場について高速フーリエ変換を行うことで、磁気ソース10ごとの磁場成分を分離することができる。これにより、モーションキャプチャ装置1は、複数の磁気ソース10を被測定者Mの舌表面に貼付した場合であっても、それぞれの磁気ソース10を特定(識別)し、その相対座標を正確に算出することができる。
【0061】
第1相対座標算出手段71には、図1および図4に示すように、プリアンプ50を介して、磁気センサ40から磁気センサ信号(タイムコードと対応付けられた磁気センサ信号)が入力される。そして、第1相対座標算出手段71は、前記した手法によって第1相対座標を算出し、図4に示すように、第1相対座標を第1絶対座標算出手段73に出力する。
【0062】
第2絶対座標算出手段72は、被測定者Mの顔表面に貼付された磁気センサ40の絶対座標を算出するものである。ここで、磁気センサ40の絶対座標とは、被測定者Mの顔表面に貼付された磁気センサ40の絶対的な位置(世界座標系における座標値)のことを意味している。なお、第2絶対座標は、被測定者Mの顔表面に貼付されているものによって意味合いが異なり、例えば本実施形態とは逆に被測定者Mの顔表面に磁気ソース10が貼付されている場合は、当該磁気ソース10の絶対的な位置が第2絶対座標となる。
【0063】
第2絶対座標算出手段72は、図4に示すように、複数の撮影装置60から入力された光学マーカ41の画像と、予め設定されたカメラパラメータ(撮影位置、撮影方向および焦点距離等の設定情報)とから、光学マーカ41と同一の位置に配置された磁気センサ40の絶対座標を算出する。ここで、第2絶対座標算出手段72における絶対座標の算出処理は、一般的な光学式モーションキャプチャと同様であるため、詳細な説明は省略する。
【0064】
第2絶対座標算出手段72には、図1および図4に示すように、複数の撮影装置60から光学マーカ41を含む被測定者Mの画像データ(タイムコードと対応付けられた画像データ)が入力される。そして、第2絶対座標算出手段72は、前記した手法によって第2絶対座標を算出し、図4に示すように、当該第2絶対座標を第1絶対座標算出手段73に出力する。
【0065】
第1絶対座標算出手段73は、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出するものである。ここで、磁気ソース10の絶対座標とは、被測定者Mの舌表面に貼付された磁気ソース10の絶対的な位置(世界座標系における座標値)のことを意味している。なお、第1絶対座標は、被測定者Mの舌表面に貼付されているものによって意味合いが異なり、例えば本実施形態とは逆に被測定者Mの舌表面に磁気センサ40が貼付されている場合は、当該磁気センサ40の絶対的な位置が第2絶対座標となる。
【0066】
第1絶対座標算出手段73は、具体的には図4に示すように、第1相対座標(磁気ソース10の相対座標)に第2絶対座標(磁気センサ40の絶対座標)を加算することで、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する。第1絶対座標算出手段73は、例えば第1相対座標算出手段71から(1,1,−1)という第1相対座標が入力され、第2絶対座標算出手段72から(−3,3,3)という第2絶対座標が入力されると、両者を加算して(−2,4,2)という第1絶対座標を算出する。なお、第1相対座標と第2絶対座標には、前記したようにタイムコードが対応付けられているため、第1絶対座標算出手段73が、当該タイムコードが一致する座標同士を加算して第1絶対座標を算出する。
【0067】
第1絶対座標算出手段73には、図4に示すように、第1相対座標算出手段71から第1相対座標が、第2絶対座標算出手段72から第2絶対座標が算出される。そして、第1絶対座標算出手段73は、前記した手法によって第1絶対座標を算出し、当該第1絶対座標を出力する。
【0068】
以上のような構成を備えるモーションキャプチャ装置1は、第1相対座標算出手段71によって、磁気式モーションキャプチャ技術を用いて被測定者Mの舌表面(口内)に貼付された磁気ソース10の相対位置を算出し、第2絶対座標算出手段72によって、光学式モーションキャプチャ技術を用いて被測定者Mの顔表面に貼付された磁気センサ40の絶対位置を算出する。そして、モーションキャプチャ装置1は、第1絶対座標算出手段73によって両者を加算することで、計測中に被測定者Mの表情が変化した場合であっても、被測定者Mの舌表面に貼付された磁気ソース10の正確な絶対位置を算出することができる。
【0069】
これにより、モーションキャプチャ装置1によれば、被測定者Mの動作の制約が少ない状態で被測定者Mの舌の動きを計測することができるため、例えば手話研究の発展に資するモーションキャプチャ装置1を提供することができる。また モーションキャプチャ装置1によれば、従来手法よりも多数のセンサによって近距離から被測定者Mの舌の動きを計測できるため、計測精度の向上や、言語学研究等への応用も期待できる。
【0070】
[第1実施形態の動作]
以下、モーションキャプチャ装置1の動作について、図5を参照(適宜図4も参照)しながら簡単に説明する。なお、以下の説明では、本実施形態の特徴である座標算出手段70における処理について説明し、それ以外の処理については詳細説明を省略する。
【0071】
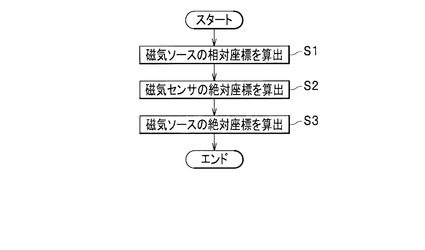
まず、モーションキャプチャ装置1は、第1相対座標算出手段71によって、磁気センサ40から入力された磁気センサ信号に基づいて、被測定者Mの舌表面に貼付された磁気ソース10の相対座標(第1相対座標)を算出する(ステップS1)。次に、モーションキャプチャ装置1は、第2絶対座標算出手段72によって、複数の撮影装置60から入力された光学マーカ41の画像とカメラパラメータとに基づいて、被測定者Mの顔表面に貼付された磁気センサ40の絶対座標(第2絶対座標)を算出する(ステップS2)。次に、モーションキャプチャ装置1は、第1絶対座標算出手段73によって、第1相対座標算出手段71から入力された第1相対座標と第2絶対座標算出手段72から入力された第2絶対座標とを加算して、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を(第1絶対座標)算出する(ステップS3)。
【0072】
このような動作により、モーションキャプチャ装置1は、被測定者Mの動作の制約が少ない状態で、被測定者Mの舌の動きを正確かつ容易に計測することができる。
【0073】
[第2実施形態]
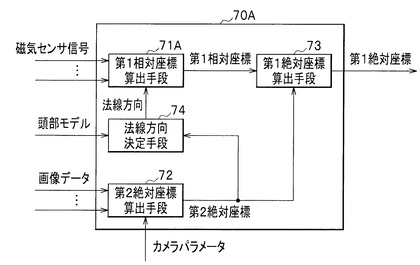
以下、第2実施形態に係るモーションキャプチャ装置1Aについて、図6を参照しながら簡単に説明する。第2実施形態に係るモーションキャプチャ装置1Aは、図6に示すように、座標算出手段70Aを備えている。そして、この座標算出手段70Aは、第1相対座標算出手段71の代わりに第1相対座標算出手段71Aを備え、さらに法線方向決定手段74を備える以外は、第1実施形態に係るモーションキャプチャ装置1の座標算出手段70と同様の構成を備えている。従って、以下の説明では、モーションキャプチャ装置1との相違点を中心に説明を行い、当該モーションキャプチャ装置1と重複する構成については詳細説明を省略する。
【0074】
法線方向決定手段74は、被測定者Mの顔表面に貼付された磁気センサ40の軸の、被測定者Mの顔表面に対する法線方向(以下、磁気センサ40の法線方向という)を算出するものである。法線方向決定手段74は、具体的には図6に示すように、被測定者Mの頭部モデルに対して、第2絶対座標算出手段72によって算出された第2絶対座標を当てはめることで、当該第2絶対座標に対応する磁気センサ40(詳細には、光学モーションキャプチャによって絶対座標が算出された光学マーカ41と同一の位置に配置された磁気センサ40)の法線方向を決定する。
【0075】
ここで、被測定者Mの頭部モデルとは、当該被測定者Mの顔を含む頭部の形状と、被測定者Mの顔表面の予め定められた座標から延びる法線の方向と、を予め計測してモデル化したものである。また、磁気センサ40は、前記したように一軸のもので構成されるが、被測定者Mの顔表面に貼付される場合は、その軸の方向が被測定者Mの顔表面の法線方向と一致するように貼付される。従って、前記したように、被測定者Mの頭部モデルに磁気センサ40の第2絶対座標を当てはめることで、当該磁気センサ40の軸がどの方向を向いているのか、すなわち磁気センサ40の法線方向を決定することができる。なお、本実施形態では、被測定者Mの顔表面に磁気センサ40を貼付する例を説明しているが、被測定者Mの顔表面に磁気ソース10を貼付する場合も、同様に磁気ソース10の法線方向(被測定者Mの顔表面に対する磁気ソース10の軸の法線方向)を決定することができる。
【0076】
法線方向決定手段74には、図6に示すように、第2絶対座標算出手段72から第2絶対座標(タイムコードと対応付けられた第2絶対座標)が、図示しない記憶手段等から被測定者Mの頭部モデルが入力される。そして、法線方向決定手段74は、前記した手法によって第2絶対座標の法線方向を決定し、図6に示すように、当該法線方向を第1相対座標算出手段71Aに出力する。
【0077】
第1相対座標算出手段71Aは、前記した第1相対座標算出手段71と同様に、被測定者Mの舌表面に貼付された磁気ソース10の相対座標を算出するものである。但し、第1相対座標算出手段71Aは、前記した第1相対座標算出手段71とは異なり、被測定者Mの顔表面に貼付された磁気センサ40の法線方向を加味して第1相対座標を算出する。
【0078】
ここで、被測定者Mの舌表面に貼付された磁気ソース10によって形成された磁場を磁気センサ40によって検出する場合、当該磁気センサ40の法線方向によって、すなわち磁気センサ40がどの方向を向いているかによって、検出される磁場の大きさが変化する。例えば、被測定者Mの口角に配置した磁気センサ40は、被測定者Mの表情が大きく変化すると、座標自体は同じでも法線方向が変化する場合があり、これにより被測定者Mの舌表面に貼付された磁気ソース10の位置が正確に算出できない場合がある。従って、磁気ソース10の相対座標をより正確に算出するには、この磁気センサ40の法線方向も加味する必要がある。第1実施形態に係るモーションキャプチャ装置1では、顔面および下の形状が概ね決まっていることを前提に近似解を得ているが、この手法の導入により、より正確な計算が可能となる。
【0079】
第1相対座標算出手段71Aは、具体的には、磁気センサ40から入力された磁気センサ信号に含まれる磁場の大きさを、磁気センサ40の法線方向ごとに予め算出された補正値によって補正することで、磁気ソース10の相対座標を算出する。これにより、磁気ソース10の相対座標をより正確に算出することができる。
【0080】
第1相対座標算出手段71Aには、図1および図6に示すように、プリアンプ50を介して、磁気センサ40から磁気センサ信号(タイムコードと対応付けられた磁気センサ信号)が入力される。そして、第1相対座標算出手段71Aは、前記した手法によって第1相対座標を算出し、図6に示すように、当該第1相対座標を第1絶対座標算出手段73に出力する。
【0081】
以上のような構成を備えるモーションキャプチャ装置1Aは、被測定者Mの顔表面の法線方向をモデル化した頭部モデルを用いることで磁気センサ40の法線方向を決定することができ、当該法線方向を加味して磁気ソース10の相対座標を算出することができる。
【0082】
これにより、モーションキャプチャ装置1Aによれば、被測定者Mの表情の変化に伴って磁気センサ40の法線方向が変化し、当該磁気センサ40の出力が変化した場合であっても、被測定者Mの舌の動きを正確に計測することができる。
【0083】
[第2実施形態の動作]
以下、モーションキャプチャ装置1Aの動作について、図7を参照(適宜図6も参照)しながら簡単に説明する。なお、以下の説明では、本実施形態の特徴である座標算出手段70Aにおける処理について説明し、それ以外の処理については詳細説明を省略する。
【0084】
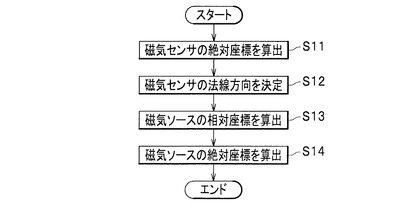
まず、モーションキャプチャ装置1Aは、第2絶対座標算出手段72によって、複数の撮影装置60から入力された光学マーカ41の画像とカメラパラメータとに基づいて、被測定者Mの顔表面に貼付された磁気センサ40の絶対座標(第2絶対座標)を算出する(ステップS11)。次に、モーションキャプチャ装置1Aは、法線方向決定手段74によって、第2絶対座標算出手段72から入力された第2絶対座標と頭部モデルとに基づいて、当該第2絶対座標の法線方向を決定する(ステップS12)。次に、モーションキャプチャ装置1Aは、第1相対座標算出手段71Aによって、磁気センサ40から入力された磁気センサ信号と法線方向決定手段74から入力された第2絶対座標の法線方向とに基づいて、被測定者Mの舌表面に貼付された磁気ソース10の相対座標(第1相対座標)を算出する(ステップS13)。次に、モーションキャプチャ装置1Aは、第1絶対座標算出手段73によって、第1相対座標算出手段71Aから入力された第1相対座標と第2絶対座標算出手段72から入力された第2絶対座標とを加算して、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を(第1絶対座標)算出する(ステップS14)。
【0085】
このような動作により、モーションキャプチャ装置1Aは、被測定者Mの動作の制約が少ない状態で、被測定者Mの舌の動きをより正確かつ容易に計測することができる。
【0086】
[モーションキャプチャプログラム]
ここで、前記したモーションキャプチャ装置1,1Aの座標算出手段70,70Aは、一般的なコンピュータを、前記した各手段として機能させるプログラムにより動作させることで実現することができる。このプログラムは、通信回線を介して配布することも可能であるし、CD−ROM等の記録媒体に書き込んで配布することも可能である。
【0087】
以上、本発明に係るモーションキャプチャ装置およびモーションキャプチャプログラムについて、発明を実施するための形態により具体的に説明したが、本発明の趣旨はこれらの記載に限定されるものではなく、特許請求の範囲の記載に基づいて広く解釈されなければならない。また、これらの記載に基づいて種々変更、改変等したものも本発明の趣旨に含まれることはいうまでもない。
【0088】
例えば、前記したモーションキャプチャ装置1,1Aは、被測定者Mの舌表面に磁気ソース10が貼付され、被測定者Mの顔表面に磁気センサ40が貼付されることを前提にしていたが、これらが逆でも構わない。この場合、第1相対座標算出手段71は、磁気センサ40によって検出された磁場の大きさから、被測定者Mの舌表面に貼付された磁気センサ40の相対座標(第1相対座標)を算出する。また、第2絶対座標算出手段72は、複数の撮影装置60によって撮影された光学マーカ41の画像から、当該光学マーカ41と同一の位置に配置された磁気ソース10の絶対座標(第2絶対座標)を算出し、第1絶対座標算出手段73が、第1相対座標に第2絶対座標を加算することで、被測定者Mの舌表面に貼付された磁気センサ40の絶対座標(第1絶対座標)を算出する。
【0089】
これにより、モーションキャプチャ装置1は、磁気センサ40を被測定者Mの舌表面に貼付し、磁気ソース10を被測定者Mの顔表面に貼付した場合において、計測中に被測定者Mの表情が変化した場合であっても、被測定者Mの舌表面に貼付された磁気センサ40の正確な絶対位置を算出することができる。また、このようなモーションキャプチャ装置1によれば、被測定者Mの湿った口内(舌表面)に励磁電流が供給される磁気ソース10を貼付する必要がないため、磁気ソース10を舌表面に貼付する場合よりも被測定者Mの舌の動きを安全に計測することができる。
【0090】
また、前記したモーションキャプチャ装置1,1Aは、手話における舌の動きを計測することを前提にしていたが、被測定者Mの舌以外の部位に磁気ソース10を貼付することで、被測定者Mの舌以外の動きを計測することも当然可能である。従って、モーションキャプチャ装置1,1Aは、手話のみならず他の分野にも広く応用することができる。
【0091】
また、前記したモーションキャプチャ装置1,1Aは、被測定者Mの顔表面にのみに光学マーカ41を貼付していたが、被測定者Mの身体の他の部位に光学マーカ41を貼付し、被測定者Mの全身の光学モーションキャプチャも併せて行っても構わない。
【0092】
また、前記したモーションキャプチャ装置1,1Aは、座標算出手段70によって、リアルタイムで被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出することを前提としていたが、リアルタイムでなくても構わない。すなわち、前記したように、磁気センサ40によって生成される磁気センサ信号と、撮影装置60によって生成される画像データには、それぞれタイムコードが対応づけられているため、これらの測定値を全て図示しない記憶手段に記憶した後に計算を実施し、オフライン処理で結果を求めても構わない。
【0093】
また、前記したモーションキャプチャ装置1,1Aは、図4および図6に示すように、座標算出手段70,70Aの中に第2絶対座標算出手段72を含めて説明したが、光学モーションキャプチャを行うものとして、当該第2絶対座標算出手段72を座標算出手段70,70Aとは別のものとして構成しても構わない。
【符号の説明】
【0094】
1,1A モーションキャプチャ装置
10 磁気ソース
20 発振器
30 絶縁アンプ
40 磁気センサ
41 光学マーカ
50 プリアンプ
60 撮影装置
70,70A 座標算出手段
71,71A 第1相対座標算出手段
72 第2絶対座標算出手段
73 第1絶対座標算出手段
74 法線方向決定手段
M 被測定者
【技術分野】
【0001】
本発明は、被測定者の動作、特に被測定者の口内における舌の動きを計測するモーションキャプチャ装置およびモーションキャプチャプログラムに関する。
【背景技術】
【0002】
従来、例えば手話をCGアニメーションで表現する技術を開発するため、手話を演じる人の動作を計測してデータを集めることが行われている。このような人体の動作の計測法はモーションキャプチャと呼ばれ、各種の手法が提案されているが、現在では計測精度や被測定者の負担や手間等のバランスの観点から、光学式モーションキャプチャが主流となっている。この光学式モーションキャプチャは、人体表面に再帰性反射材からなる光学マーカを貼付し、適切な照明(被測定者の視覚を妨害しないように近赤外光源をカメラレンズと同軸に設置して用いることが多い)の下で、当該光学マーカを付けた人物を複数のモーションキャプチャ用カメラ(撮影装置)で撮影し、画像解析によって各々の光学マーカの位置を算出するものである。
【0003】
手話では、人間の顔の表情で文法的な要素を表現することがあるため、手指の動作に加えて顔面のモーションキャプチャも必要である。この場合も被測定者の顔表面に光学マーカをつけて手話を演じてもらい、それを撮影してモーションキャプチャを行う。ここで、手話に必要な表情の中には、舌を用いるものもあるが、被測定者の口内における舌の位置を外部から光学的に計測することはできない。例えば、被測定者の舌に再帰性反射材の光学マーカを付けておけば、舌を出した時にその光学マーカを撮影することはできるが、この場合、常時見えている顔表面の光学マーカと、現れたり消えたりする舌の光学マーカとの対応関係を計算することが困難となる。
【0004】
このような被測定者が口を閉じている場合の舌の動きの計測には、磁気を利用する方法が提案され、言語学研究等に用いられている。例えば、ゲッチンゲン大学で考案されたシステムはEMA(ElectroMagnetic Articulograph)、マサチューセッツ工科大学(MIT)で考案されたシステムはEMMA(ElectroMagnetic Midsagittal Articulometer)と称される。このうち、ゲッチンゲン大学のシステムはドイツのCarstens社が製造および販売しており、一般にはEMAの名で呼ばれることが多い(非特許文献1)。
【0005】
また、被測定者の舌の上に微小な永久磁石(磁気ソース)を貼付し、ホール素子からなる磁気センサが被測定者の頭部に対して固定された位置(一定の位置)となるように、装具等を用いて被測定者の頭部に磁気センサを固定する手法も提案されている(非特許文献2)。またその他にも、光ファイバから被測定者の口内にレーザを照射し、その散乱光から舌の位置を計測するシステムも提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許3722987号公報
【非特許文献】
【0007】
【非特許文献1】“Brochure-AG500”、Carstens社、[平成23年7月26日検索]、インターネット<URL:http://www.articulograph.de/images/brochure.pdf >
【非特許文献2】C. Dromey et. al.,“Measuring tongue movements during speech”,Adaptation of a magnetic jaw-tracking system,Speech Communication,Vol.48,PP.463−473,2006
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、非特許文献1において提案されたEMAによる舌の位置の計測法では、被測定者の近傍に複数のコイルを固定し、被測定者はそのコイルによって形成された磁場が及ぶ範囲内で手話等の演技を行う必要があった。また、非特許文献2において提案された手法は、前記したように被測定者の頭部に大きな装具を装着し、被測定者の頭部に対するセンサの相対位置を固定する必要があった。
【0009】
ここで、通常の言語現象に伴う舌の動きの計測であれば、非特許文献1,2の手法でも問題は少ないが、例えば手話の動作に伴って生じる舌の動きを計測しようとすると、手や腕の動作が伴い、またそれに応じて被測定者の上体も動くことがある。従って、非特許文献1,2の手法では、被測定者の身体のすぐ傍に置かれたコイルやその支持装置、あるいは被測定者の頭部に装着した装具が動作の障害になる可能性があり、被測定者の動作の制約が大きいという問題があった。
【0010】
また、特許文献1で提案された技術は、被測定者が舌を口外に出してしまうと計測できないという問題があった。なお、音声学の研究等では、前記した手法の他にもX線撮影、MRI、超音波スキャナ等で舌の動きを計測した報告もあるが、いずれも被測定者の負担が大きいか、あるいは被測定者の身体が強く拘束されるため、手話等の計測対象には不向きであった。
【0011】
本発明はかかる点に鑑みてなされたものであって、被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供することを課題とする。
【課題を解決するための手段】
【0012】
前記課題を解決するために請求項1に係るモーションキャプチャ装置は、被測定者の顔表面または舌表面の一方に貼付される磁気ソースと、被測定者の顔表面または舌表面の他方に貼付され、磁気ソースによって形成される磁場を検出する磁気センサと、被測定者の顔表面に貼付された磁気ソースまたは前記磁気センサと同一の位置に配置された光学マーカと、この光学マーカを異なる位置および異なる方向から撮影する複数の撮影装置と、磁気センサによって検出された磁場と、撮影装置によって撮影された画像とから、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの座標を算出する座標算出手段と、からなり、この座標算出手段が、第1相対座標算出手段と、第2絶対座標算出手段と、第1絶対座標算出手段と、を備える構成とした。
【0013】
このような構成によれば、モーションキャプチャ装置は、第1相対座標算出手段によって、磁気センサによって検出された磁場の大きさから、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの相対的な座標を示す第1相対座標を算出する。また、モーションキャプチャ装置は、第2絶対座標算出手段によって、複数の撮影装置によって撮影された光学マーカの画像から、当該光学マーカと同一の位置に配置された磁気ソースまたは磁気センサの絶対的な座標を示す第2絶対座標を算出する。また、モーションキャプチャ装置は、第1絶対座標算出手段によって、第1相対座標に第2絶対座標を加算することで、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの絶対的な座標を示す第1絶対座標を算出する。
【0014】
これにより、モーションキャプチャ装置は、第1相対座標算出手段によって、磁気式モーションキャプチャ技術を用いて被測定者の舌表面(口内)に貼付された磁気ソースまたは磁気センサの相対位置を算出し、第2絶対座標算出手段によって、光学式モーションキャプチャ技術を用いて被測定者の顔表面に貼付された磁気ソースまたは磁気センサの絶対位置を算出する。そして、モーションキャプチャ装置は、第1絶対座標算出手段によって両者を加算することで、計測中に被測定者の表情が変化した場合であっても、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの正確な絶対位置を算出することができる。
【0015】
なお、第1相対座標とは、被測定者の顔表面に貼付された磁気センサからみた被測定者の舌表面に貼付された磁気ソースの相対的な位置、あるいは、被測定者の顔表面に貼付された磁気ソースからみた被測定者の舌表面に貼付された磁気センサの相対的な位置のことを意味している。また、第1絶対座標とは、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの絶対的な位置のことを、第2絶対座標とは、被測定者の顔表面に貼付された磁気ソースまたは磁気センサの絶対的な位置のことを意味している。
【0016】
また、請求項2に係るモーションキャプチャ装置は、請求項1に係るモーションキャプチャ装置において、磁気ソースが電磁石からなるとともに、被測定者の顔表面または舌表面に複数貼付され、磁気センサが被測定者の顔表面または舌表面に複数貼付され、複数の磁気ソースのそれぞれには、異なる周波数の励磁電流が供給され、第1相対座標算出手段が、磁気センサによって検出された複数の磁場のそれぞれについて周波数分離を行うことで、各々の磁気ソースによって形成される磁場を分離し、当該分離された磁場の大きさから前記第1相対座標を算出する構成とした。
【0017】
これにより、モーションキャプチャ装置は、被測定者の顔表面または舌表面に電磁石からなる磁気ソースが複数貼付されことで、磁気センサによって検出した磁場に複数の磁気ソースからの誘導成分が含まれている場合であっても、それぞれの磁気ソースに異なる周波数の励磁電流を供給し、かつ、磁気センサによって検出した磁場について高速フーリエ変換等による周波数分離を行うことで、磁気ソースごとの磁場成分を分離することができる。
【0018】
また、請求項3に係るモーションキャプチャ装置は、請求項1または請求項2に係るモーションキャプチャ装置において、法線方向決定手段を備える構成とした。
【0019】
このような構成によれば、モーションキャプチャ装置は、法線方向決定手段によって、被測定者の顔表面の法線方向をモデル化した被測定者の頭部モデルに第2絶対座標を当てはめることで、当該第2絶対座標に対応する磁気ソースまたは磁気センサの前記被測定者の顔表面に対する法線方向を決定する。これを受けて、モーションキャプチャ装置は、第1相対座標算出手段によって、磁気センサによって検出された磁場の大きさと、磁気センサまたは磁気ソースの法線方向とから、第1相対座標を算出する。
【0020】
これにより、モーションキャプチャ装置は、被測定者の顔表面の法線方向をモデル化した頭部モデルを用いることで磁気ソースまたは磁気センサ40の被測定者Mの顔表面に対する法線方向を決定することができ、当該法線方向を加味して第1相対座標を算出することができる。
【0021】
また、請求項4に係るモーションキャプチャ装置は、請求項1から請求項3のいずれか一項に係るモーションキャプチャ装置において、磁気ソースが被測定者の舌表面に貼付されるとともに、磁気センサが被測定者の顔表面に貼付され、第1相対座標算出手段が、磁気センサによって検出された磁場の大きさから、被測定者の舌表面に貼付された磁気ソースの第1相対座標を算出し、第2絶対座標算出手段が、複数の撮影装置によって撮影された光学マーカの画像から、当該光学マーカと同一の位置に配置された磁気センサの第2絶対座標を算出し、第1絶対座標算出手段が、第1相対座標に第2絶対座標を加算することで、被測定者の舌表面に貼付された磁気ソースの第1絶対座標を算出する構成とした。
【0022】
これにより、モーションキャプチャ装置は、磁気ソースを被測定者の舌表面に貼付し、磁気センサを被測定者の顔表面に貼付した場合において、計測中に被測定者の表情が変化した場合であっても、被測定者の舌表面に貼付された磁気ソースの正確な絶対位置を算出することができる。
【0023】
また、請求項5に係るモーションキャプチャ装置は、請求項4に係るモーションキャプチャ装置において、被測定者の舌表面に配置された磁気ソースに一端が接続され、他端が被測定者の口外に露出された所定長さの紐部材を備え、磁気ソースが永久磁石からなるとともに、当該磁気ソースに紐部材の一端が接続される構成とした。
【0024】
これにより、モーションキャプチャ装置は、被測定者の舌表面、すなわち口内に磁気ソースである永久磁石を貼付した際に、当該永久磁石と接続された紐部材の一部が口外に露出して口外にある支持部材等に接続されていることにより、その紐部材をすぐに手指で掴むことができる状態にある。
【0025】
また、請求項6に係るモーションキャプチャ装置は、請求項1から請求項3のいずれか一項に係るモーションキャプチャ装置において、磁気ソースが被測定者の顔表面に貼付されるとともに、磁気センサが被測定者の舌表面に貼付され、第1相対座標算出手段が、磁気センサによって検出された磁場の大きさから、被測定者の舌表面に貼付された磁気センサの第1相対座標を算出し、第2絶対座標算出手段が、複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された磁気ソースの第2絶対座標を算出し、第1絶対座標算出手段が、第1相対座標に前記第2絶対座標を加算することで、被測定者の舌表面に貼付された磁気センサの第1絶対座標を算出する構成とした。
【0026】
これにより、モーションキャプチャ装置は、磁気センサを被測定者の舌表面に貼付し、磁気ソースを被測定者の顔表面に貼付した場合において、計測中に被測定者の表情が変化した場合であっても、被測定者の舌表面に貼付された磁気センサの正確な絶対位置を算出することができる。
【0027】
前記課題を解決するためにモーションキャプチャプログラムは、被測定者の顔表面または舌表面の一方に貼付される磁気ソースと、被測定者の顔表面または舌表面の他方に貼付され、磁気ソースによって形成される磁場を検出する磁気センサと、顔表面に貼付された磁気ソースまたはセンサと同一の位置に配置された光学マーカと、光学マーカを異なる位置および異なる方向から撮影する複数の撮影装置と、からなるモーションキャプチャ装置において、磁気センサによって検出された磁場と、撮影装置によって撮影された画像とから、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの座標を算出するために、コンピュータを、第1相対座標算出手段、第2絶対座標算出手段、第1絶対座標算出手段、として機能させるための構成とした。
【0028】
このような構成によれば、モーションキャプチャプログラムは、第1相対座標算出手段によって、磁気センサによって検出された磁場の大きさから、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの相対的な座標を示す第1相対座標を算出する。また、モーションキャプチャ装置は、第2絶対座標算出手段によって、複数の撮影装置によって撮影された光学マーカの画像から、当該光学マーカと同一の位置に配置された磁気ソースまたは磁気センサの絶対的な座標を示す第2絶対座標を算出する。また、モーションキャプチャ装置は、第1絶対座標算出手段によって、第1相対座標に第2絶対座標を加算することで、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの絶対的な座標を示す第1絶対座標を算出する。
【0029】
これにより、モーションキャプチャプログラムは、第1相対座標算出手段によって、磁気式モーションキャプチャ技術を用いて被測定者の舌表面(口内)に貼付された磁気ソースまたは磁気センサの相対位置を算出し、第2絶対座標算出手段によって、光学式モーションキャプチャ技術を用いて被測定者の顔表面に貼付された磁気ソースまたは磁気センサの絶対位置を算出する。そして、モーションキャプチャプログラムは、第1絶対座標算出手段によって両者を加算することで、計測中に被測定者の表情が変化した場合であっても、被測定者の舌表面に貼付された磁気ソースまたは磁気センサの正確な絶対位置を算出することができる。
【発明の効果】
【0030】
請求項1および請求項7に係る発明によれば、被測定者の動作の制約が少ない状態で被測定者の舌の動きを計測することができるため、例えば手話研究の発展に資するモーションキャプチャ装置およびモーションキャプチャプログラムを提供することができる。また 請求項1および請求項7に係る発明によれば、従来手法よりも多数のセンサによって近距離から被測定者の舌の動きを計測できるため、計測精度の向上や、言語学研究等への応用も期待できる。
【0031】
請求項2に係る発明によれば、複数の磁気ソースまたは複数の磁気センサを被測定者の舌表面に貼付した場合であっても、それぞれの磁気ソースまたは磁気センサを特定(識別)し、その相対座標を正確に算出することができるため、被測定者の舌の動きを正確に計測することができる。
【0032】
請求項3に係る発明によれば、被測定者の表情の変化に伴って磁気ソースまたは磁気センサの被測定者の顔表面に対する法線方向が変化し、磁気センサの出力が変化した場合であっても、被測定者の舌の動きを正確に計測することができる。
【0033】
請求項4に係る発明によれば、顔表面よりも面積が小さい舌表面に磁気ソースを貼付することにより、顔表面に磁気ソースを貼付する場合よりも磁気ソースの数を減らして当該磁気ソースに供給する励磁電流の供給量を少なくすることができるため、計測の際のコストを低減することができる。
【0034】
請求項5に係る発明によれば、被測定者の舌表面に貼付される磁気ソースが永久磁石からなる場合であっても、紐部材を備えているため、被測定者が当該永久磁石を誤って飲み込むことを防止することができ、被測定者の舌の動きを安全に計測することができる。
【0035】
請求項6に係る発明によれば、被測定者の湿った口内(舌表面)に励磁電流が供給される磁気ソースを貼付する必要がないため、磁気ソースを舌表面に貼付する場合よりも被測定者の舌の動きを安全に計測することができる。
【図面の簡単な説明】
【0036】
【図1】本発明の実施形態に係るモーションキャプチャ装置の全体構成を示す概略図である。
【図2】本発明の実施形態に係るモーションキャプチャ装置における被測定者の舌表面への磁気ソースの貼付例を示す概略図である。
【図3】本発明の実施形態に係るモーションキャプチャ装置における被測定者の顔表面への磁気センサの貼付例を示す概略図である。
【図4】本発明の実施形態に係るモーションキャプチャ装置における座標算出手段の内部構成を示すブロック図である。
【図5】本発明の実施形態に係るモーションキャプチャ装置の動作を示すフローチャートである。
【図6】本発明の他の実施形態に係るモーションキャプチャ装置における座標算出手段の内部構成を示すブロック図である。
【図7】本発明の他の実施形態に係るモーションキャプチャ装置の動作を示すフローチャートである。
【図8】本発明の他の実施形態に係るモーションキャプチャ装置の全体構成を示す概略図である。
【発明を実施するための形態】
【0037】
本発明の実施形態に係るモーションキャプチャ装置について、図面を参照しながら説明する。なお、以下の説明において、同一の構成については同一の名称及び符号を付し、詳細説明を省略する。
【0038】
[第1実施形態]
以下、第1実施形態に係るモーションキャプチャ装置1の構成について、図1〜図4を参照しながら詳細に説明する。モーションキャプチャ装置1は、図1に示すように、被測定者Mの舌の動きを計測するものである。モーションキャプチャ装置1は、ここでは図1に示すように、磁気ソース10と、発振器20と、絶縁アンプ30と、磁気センサ40と、光学マーカ41と、プリアンプ50と、撮影装置60と、座標算出手段70と、を備えている。
【0039】
磁気ソース10は、磁場を発生させるものである。磁気ソース10は、例えば微小なコイルからなる電磁石や、微小な永久磁石等により構成され、被測定者Mの舌表面または顔表面に貼付される。また、磁気ソース10は、被測定者Mの舌表面または顔表面に貼付される際の厚さを極力薄くするために、一軸のものを用いることが好ましい。なお、このように一軸の磁気ソース10を用いた場合、当該磁気ソース10の三次元座標(後記する第1相対座標)は、少なくとも3つの磁気センサ40によって検出された磁場を用いて算出する。
【0040】
ここで、以下の説明では、磁気ソース10として電磁石を用い、図1に示すように、当該磁気ソース10が被測定者Mの舌表面に貼付される例について説明する。このように被測定者Mの舌表面に貼付された磁気ソース10は、図1に示すように、絶縁アンプ30を介して発振器20に接続されており、当該発振器20から所定の周波数の励磁電流が供給されて磁場を発生できるように構成されている。
【0041】
磁気ソース10は、具体的には図2に示すように、被測定者Mの舌表面の所定位置に所定個数貼付される。磁気ソース10は、ここでは図2に示すように、被測定者Mの舌表面に十字状に6個配置されている。但し、磁気ソース10の配置位置および個数は、計測対象や計測条件等によって異なるため、図2に示す例に限定されない。例えば、被測定者Mの舌が口内または口外のどちらにあるかということのみを計測する場合、磁気ソース10は被測定者Mの舌表面に1個のみ貼付されても構わない。磁気ソース10は、例えば医療用に用いられる口内用の接着剤を用いて被測定者Mの舌表面に貼付される。
【0042】
ここで、被測定者Mの舌表面に配置される磁気ソース10の数は、図2および図3に示すように、被測定者Mの顔表面に配置される磁気センサ40の数よりも少なくなるように構成される。これにより、モーションキャプチャ装置1は、被測定者Mの顔表面よりも面積が小さい舌表面に磁気ソース10を貼付することにより、被測定者Mの顔表面に磁気ソース10を貼付する場合よりも磁気ソース10の数を減らして当該磁気ソース10に供給する励磁電流の供給量を少なくすることができるため、計測の際のコストを低減することができる。
【0043】
また、磁気ソース10としては、前記したように微小な永久磁石を用いることもできる。この場合、モーションキャプチャ装置1において発振器20や絶縁アンプ30が不要となるため、被測定者Mの動作の制約がより少なくなるという利点がある。但し、被測定者Mの舌表面に貼付する磁気ソース10として永久磁石を用いる場合は、当該磁気ソース10に一端が接続され、他端が被測定者Mの口外に露出された所定長さの紐部材(図示省略)を備えることが好ましい。
【0044】
これにより、被測定者Mの舌表面、すなわち口内に磁気ソース10である永久磁石を貼付した際に、当該永久磁石と接続された紐部材の一部が口外に露出して口外にある支持部材等に接続されていることにより、その紐部材をすぐに手指で掴むことができる状態にある。そのため、被測定者Mの舌表面に貼付される磁気ソース10が永久磁石からなる場合であっても、紐部材を備えているため、被測定者Mが当該永久磁石を誤って飲み込むことを防止することができ、被測定者Mの舌の動きを安全に計測することができる。なお、この紐部材の素材は、細く柔軟であり被測定者Mの舌や唇の動きを阻害しないものであれば、特に限定されない。すなわち、紐部材は、例えば繊維や金属等で構成しても構わない。
【0045】
発振器20は、磁気ソース10に対して励磁電流を供給するものである。発振器20は、例えばファンクションジェネレータ等によって構成され、図1に示すように、絶縁アンプ30に接続されている。そして、発振器20は、当該絶縁アンプ30を介して被測定者Mの舌表面に貼付された磁気ソース10に所定の周波数の正弦波を発振することで励磁電流を供給する。なお、発振器20は、磁気ソース10を電磁石で構成した場合に必要となり、磁気ソース10を永久磁石で構成した場合は不要となる。
【0046】
発振器20は、図2に示すように、磁気ソース10が電磁石で構成されるとともに被測定者Mの舌表面に複数貼付された場合、図1に示すように、当該磁気ソース10の個数に合わせて複数設け、複数の磁気ソース10のそれぞれに異なる周波数(f1〜fk(kは磁気ソース10および発振器20の数))の励磁電流を供給することが好ましい。これにより、複数の磁気ソース10を用いた場合であっても、後記する座標算出手段70において、それぞれの磁気ソース10によって形成された磁場成分を分離することができる。
【0047】
絶縁アンプ30は、発振器20から発振された励磁電流を増幅するものである。絶縁アンプ30は、入力部と出力部間が絶縁され、電池駆動できるように構成されている。アンプとして絶縁アンプ30を用いるのは、測定者Mの口内という湿った部位に貼付された磁気ソース10に励磁電流を供給するための安全上の理由からである。従って、本実施形態の構成とは逆に、被測定者Mの舌表面に磁気センサ40を貼付した場合や、磁気ソース10として永久磁石で構成した場合、絶縁アンプは不要となる。
【0048】
絶縁アンプ30は、図1に示すように、被測定者Mの舌表面に貼付された磁気ソース10と、例えば細く柔軟な撚り対線等によって接続される。これにより、被測定者Mの舌や唇等の動きが阻害されることを防止することができる。なお、絶縁アンプ30は、図2に示すように、磁気ソース10が電磁石で構成されるとともに被測定者Mの舌表面に複数貼付された場合、図1に示すように、当該磁気ソース10の個数に合わせて複数設け、複数の磁気ソース10のそれぞれに増幅した励磁電流を供給する。
【0049】
磁気センサ40は、磁場を検出するものである。磁気センサ40は、例えば微小なコイル、ホール素子、磁気抵抗素子等により構成され、被測定者Mの舌表面または顔表面に貼付される。また、磁気センサ40は、被測定者Mの舌表面または顔表面に貼付される際の厚さを極力薄くするために、一軸のものを用いることが好ましい。
【0050】
ここで、以下の説明では、図1に示すように、磁気センサ40は被測定者Mの顔表面に貼付される例について説明する。このように被測定者Mの顔表面に貼付された磁気センサ40は、図1に示すように、プリアンプ50を介して座標算出手段70に接続されており、検出した磁場の大きさを示す磁気センサ信号を座標算出手段70に出力できるように構成されている。なお、この磁気センサ信号は、磁場を検出した時刻を示すタイムコードとともに記録される(図示省略)。
【0051】
磁気センサ40は、具体的には図3に示すように、被測定者Mの顔表面の所定位置に所定個数貼付される。磁気センサ40は、ここでは図3に示すように、被測定者Mの顔表面において、当該被測定者Mが顔の表情を変化させた場合における変化が顕著な部位(特徴点)に沿って配置される。これは、後記するように、磁気センサ40と同一の位置に、光学モーションキャプチャ用の光学マーカ41が配置されるためである。但し、磁気センサ40の配置位置および個数は、計測対象および計測条件等によって異なるため、図3に示す例に限定されない。ここで、被測定者Mの顔表面に配置される磁気センサ40の数は、図2および図3に示すように、被測定者Mの舌表面に配置される磁気センサ40の数よりも多くなるように構成される。
【0052】
光学マーカ41は、光学モーションキャプチャにおける指標となるものである。光学マーカ41は、例えば再帰性反射材からなり、図1および図3に示すように、磁気センサ40と同一の位置に配置される。光学マーカ41は、より具体的には被測定者Mの顔表面に貼付された磁気センサ40の上(表面)に貼付される。この光学マーカ41の周囲には、図1に示すように、複数の撮影装置60と、光学式モーションキャプチャ用の照明光源(図示省略)とが配置されており、当該複数の撮影装置60によって撮影された光学マーカ41を含む被測定者Mの画像を座標算出手段70に出力できるように構成されている。
【0053】
光学マーカ41は、具体的には図3に示すように、被測定者Mの顔表面の所定位置に所定個数貼付される。また、光学マーカ41と同一の位置には、図3に示すように、磁気センサ40が配置される。但し、光学マーカ41の配置位置および個数は、計測対象および計測条件等によって異なるため、図3に示す例に限定されない。また、光学マーカ41は、図3に示す例では磁気センサ40と同数配置されているが、磁気センサ40と必ずしも同数でなくてもよく、当該磁気センサ40よりも多くても構わない。
【0054】
プリアンプ50は、磁気センサ40が生成した磁気センサ信号を増幅するものである。また、プリアンプ50は、図1に示すように、増幅した磁気センサ信号をA/D変換する機能も同時に備えている。プリアンプ50は、図1に示すように、被測定者Mの顔表面に貼付された磁気センサ40と、例えば細く柔軟な撚り対線等によって接続される。これにより、被測定者Mの表情の動きが阻害されることを防止することができる。なお、プリアンプ50は、図3に示すように、磁気センサ40が被測定者Mの顔表面に複数貼付された場合、図1に示すように、当該磁気センサ40の個数に合わせて複数設け、増幅およびA/D変換したそれぞれの磁気センサ信号を座標算出手段70に出力する。
【0055】
撮影装置60は、被測定者Mの顔表面に貼付された光学マーカ41を撮影するものである。撮影装置60は、例えば光学式モーションキャプチャ用のビデオカメラを用いることができる。また、撮影装置60は、図1に示すように、被測定者Mの顔表面に貼付された光学マーカ41を異なる位置および方向から撮影できるように、複数設置される。なお、図1に示す例では、撮影装置60を3台のみ図示したが、撮影装置60の台数はこれに限定されない。撮影装置60は、図1に示すように、撮影した光学マーカ41を含む被測定者Mの頭部の画像データを座標算出手段70に出力する。なお、この画像データには、当該画像を撮影した時刻を示すタイムコードが対応づけられている(図示省略)。
【0056】
座標算出手段70は、磁気センサ40によって検出された磁場と、撮影装置60によって撮影された画像とを利用して、磁気ソース10の座標を算出するものである。座標算出手段70は、ここでは図4に示すように、第1相対座標算出手段71と、第2絶対座標算出手段72と、第1絶対座標算出手段73と、を備えている。
【0057】
第1相対座標算出手段71は、被測定者Mの舌表面に貼付された磁気ソース10の相対座標を算出するものである。ここで、磁気ソース10の相対座標(第1相対座標)とは、被測定者Mの顔表面に貼付された磁気センサ40を基準とした磁気ソース10の相対的な位置のことを意味している。なお、第1相対座標は、被測定者Mの舌表面に貼付されているものによって意味合いが異なり、例えば本実施形態とは逆に被測定者Mの舌表面に磁気センサ40が貼付されている場合は、磁気ソース10を基準とした磁気センサ40の相対的な位置が第1相対座標となる。
【0058】
第1相対座標算出手段71は、図4に示すように、磁気センサ40から入力された磁気センサ信号に含まれる磁場の大きさから、当該磁場を形成する磁気ソース10の相対座標を算出する。第1相対座標算出手段71は、前記したように、磁気ソース10および磁気センサ40が一軸のものである場合、1つの磁気ソース10に対して、任意に選択した3つの磁気センサ40によって検出された磁場を合成することで、当該磁気ソース10の三次元の相対座標を算出する。ここで、第1相対座標算出手段71における相対座標の算出処理は、一般的な磁気式モーションキャプチャと同様であるため、詳細な説明は省略する。
【0059】
第1相対座標算出手段71は、磁気ソース10が電磁石からなり、図2および図3に示すように、被測定者Mの舌表面および顔表面に磁気ソース10および磁気センサ40がそれぞれ複数貼付された場合、各磁気センサ40によって検出された複数の磁場のそれぞれについて周波数分離を行うことが好ましい。この周波数分離の手法としては、高速フーリエ変換(FFT)が挙げられるが、例えばアナログ領域においてフィルタで分離する方法等、FFT以外の周波数解析手法を用いても構わない。
【0060】
すなわち、被測定者Mの舌表面に磁気ソース10が複数貼付された場合、磁気センサ40によって検出された磁場に基づいて第1相対座標算出手段71に入力される磁気センサ信号には、被測定者Mの舌表面に貼付された全ての磁気ソース10からの誘導成分が含まれている。しかしながら、複数の磁気ソース10には、前記したように発振器20からそれぞれ異なる周波数(f1〜fk(kは磁気ソース10および発振器20の数))の励磁電流が供給されている。従って、磁気センサによって検出した磁場について高速フーリエ変換を行うことで、磁気ソース10ごとの磁場成分を分離することができる。これにより、モーションキャプチャ装置1は、複数の磁気ソース10を被測定者Mの舌表面に貼付した場合であっても、それぞれの磁気ソース10を特定(識別)し、その相対座標を正確に算出することができる。
【0061】
第1相対座標算出手段71には、図1および図4に示すように、プリアンプ50を介して、磁気センサ40から磁気センサ信号(タイムコードと対応付けられた磁気センサ信号)が入力される。そして、第1相対座標算出手段71は、前記した手法によって第1相対座標を算出し、図4に示すように、第1相対座標を第1絶対座標算出手段73に出力する。
【0062】
第2絶対座標算出手段72は、被測定者Mの顔表面に貼付された磁気センサ40の絶対座標を算出するものである。ここで、磁気センサ40の絶対座標とは、被測定者Mの顔表面に貼付された磁気センサ40の絶対的な位置(世界座標系における座標値)のことを意味している。なお、第2絶対座標は、被測定者Mの顔表面に貼付されているものによって意味合いが異なり、例えば本実施形態とは逆に被測定者Mの顔表面に磁気ソース10が貼付されている場合は、当該磁気ソース10の絶対的な位置が第2絶対座標となる。
【0063】
第2絶対座標算出手段72は、図4に示すように、複数の撮影装置60から入力された光学マーカ41の画像と、予め設定されたカメラパラメータ(撮影位置、撮影方向および焦点距離等の設定情報)とから、光学マーカ41と同一の位置に配置された磁気センサ40の絶対座標を算出する。ここで、第2絶対座標算出手段72における絶対座標の算出処理は、一般的な光学式モーションキャプチャと同様であるため、詳細な説明は省略する。
【0064】
第2絶対座標算出手段72には、図1および図4に示すように、複数の撮影装置60から光学マーカ41を含む被測定者Mの画像データ(タイムコードと対応付けられた画像データ)が入力される。そして、第2絶対座標算出手段72は、前記した手法によって第2絶対座標を算出し、図4に示すように、当該第2絶対座標を第1絶対座標算出手段73に出力する。
【0065】
第1絶対座標算出手段73は、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出するものである。ここで、磁気ソース10の絶対座標とは、被測定者Mの舌表面に貼付された磁気ソース10の絶対的な位置(世界座標系における座標値)のことを意味している。なお、第1絶対座標は、被測定者Mの舌表面に貼付されているものによって意味合いが異なり、例えば本実施形態とは逆に被測定者Mの舌表面に磁気センサ40が貼付されている場合は、当該磁気センサ40の絶対的な位置が第2絶対座標となる。
【0066】
第1絶対座標算出手段73は、具体的には図4に示すように、第1相対座標(磁気ソース10の相対座標)に第2絶対座標(磁気センサ40の絶対座標)を加算することで、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する。第1絶対座標算出手段73は、例えば第1相対座標算出手段71から(1,1,−1)という第1相対座標が入力され、第2絶対座標算出手段72から(−3,3,3)という第2絶対座標が入力されると、両者を加算して(−2,4,2)という第1絶対座標を算出する。なお、第1相対座標と第2絶対座標には、前記したようにタイムコードが対応付けられているため、第1絶対座標算出手段73が、当該タイムコードが一致する座標同士を加算して第1絶対座標を算出する。
【0067】
第1絶対座標算出手段73には、図4に示すように、第1相対座標算出手段71から第1相対座標が、第2絶対座標算出手段72から第2絶対座標が算出される。そして、第1絶対座標算出手段73は、前記した手法によって第1絶対座標を算出し、当該第1絶対座標を出力する。
【0068】
以上のような構成を備えるモーションキャプチャ装置1は、第1相対座標算出手段71によって、磁気式モーションキャプチャ技術を用いて被測定者Mの舌表面(口内)に貼付された磁気ソース10の相対位置を算出し、第2絶対座標算出手段72によって、光学式モーションキャプチャ技術を用いて被測定者Mの顔表面に貼付された磁気センサ40の絶対位置を算出する。そして、モーションキャプチャ装置1は、第1絶対座標算出手段73によって両者を加算することで、計測中に被測定者Mの表情が変化した場合であっても、被測定者Mの舌表面に貼付された磁気ソース10の正確な絶対位置を算出することができる。
【0069】
これにより、モーションキャプチャ装置1によれば、被測定者Mの動作の制約が少ない状態で被測定者Mの舌の動きを計測することができるため、例えば手話研究の発展に資するモーションキャプチャ装置1を提供することができる。また モーションキャプチャ装置1によれば、従来手法よりも多数のセンサによって近距離から被測定者Mの舌の動きを計測できるため、計測精度の向上や、言語学研究等への応用も期待できる。
【0070】
[第1実施形態の動作]
以下、モーションキャプチャ装置1の動作について、図5を参照(適宜図4も参照)しながら簡単に説明する。なお、以下の説明では、本実施形態の特徴である座標算出手段70における処理について説明し、それ以外の処理については詳細説明を省略する。
【0071】
まず、モーションキャプチャ装置1は、第1相対座標算出手段71によって、磁気センサ40から入力された磁気センサ信号に基づいて、被測定者Mの舌表面に貼付された磁気ソース10の相対座標(第1相対座標)を算出する(ステップS1)。次に、モーションキャプチャ装置1は、第2絶対座標算出手段72によって、複数の撮影装置60から入力された光学マーカ41の画像とカメラパラメータとに基づいて、被測定者Mの顔表面に貼付された磁気センサ40の絶対座標(第2絶対座標)を算出する(ステップS2)。次に、モーションキャプチャ装置1は、第1絶対座標算出手段73によって、第1相対座標算出手段71から入力された第1相対座標と第2絶対座標算出手段72から入力された第2絶対座標とを加算して、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を(第1絶対座標)算出する(ステップS3)。
【0072】
このような動作により、モーションキャプチャ装置1は、被測定者Mの動作の制約が少ない状態で、被測定者Mの舌の動きを正確かつ容易に計測することができる。
【0073】
[第2実施形態]
以下、第2実施形態に係るモーションキャプチャ装置1Aについて、図6を参照しながら簡単に説明する。第2実施形態に係るモーションキャプチャ装置1Aは、図6に示すように、座標算出手段70Aを備えている。そして、この座標算出手段70Aは、第1相対座標算出手段71の代わりに第1相対座標算出手段71Aを備え、さらに法線方向決定手段74を備える以外は、第1実施形態に係るモーションキャプチャ装置1の座標算出手段70と同様の構成を備えている。従って、以下の説明では、モーションキャプチャ装置1との相違点を中心に説明を行い、当該モーションキャプチャ装置1と重複する構成については詳細説明を省略する。
【0074】
法線方向決定手段74は、被測定者Mの顔表面に貼付された磁気センサ40の軸の、被測定者Mの顔表面に対する法線方向(以下、磁気センサ40の法線方向という)を算出するものである。法線方向決定手段74は、具体的には図6に示すように、被測定者Mの頭部モデルに対して、第2絶対座標算出手段72によって算出された第2絶対座標を当てはめることで、当該第2絶対座標に対応する磁気センサ40(詳細には、光学モーションキャプチャによって絶対座標が算出された光学マーカ41と同一の位置に配置された磁気センサ40)の法線方向を決定する。
【0075】
ここで、被測定者Mの頭部モデルとは、当該被測定者Mの顔を含む頭部の形状と、被測定者Mの顔表面の予め定められた座標から延びる法線の方向と、を予め計測してモデル化したものである。また、磁気センサ40は、前記したように一軸のもので構成されるが、被測定者Mの顔表面に貼付される場合は、その軸の方向が被測定者Mの顔表面の法線方向と一致するように貼付される。従って、前記したように、被測定者Mの頭部モデルに磁気センサ40の第2絶対座標を当てはめることで、当該磁気センサ40の軸がどの方向を向いているのか、すなわち磁気センサ40の法線方向を決定することができる。なお、本実施形態では、被測定者Mの顔表面に磁気センサ40を貼付する例を説明しているが、被測定者Mの顔表面に磁気ソース10を貼付する場合も、同様に磁気ソース10の法線方向(被測定者Mの顔表面に対する磁気ソース10の軸の法線方向)を決定することができる。
【0076】
法線方向決定手段74には、図6に示すように、第2絶対座標算出手段72から第2絶対座標(タイムコードと対応付けられた第2絶対座標)が、図示しない記憶手段等から被測定者Mの頭部モデルが入力される。そして、法線方向決定手段74は、前記した手法によって第2絶対座標の法線方向を決定し、図6に示すように、当該法線方向を第1相対座標算出手段71Aに出力する。
【0077】
第1相対座標算出手段71Aは、前記した第1相対座標算出手段71と同様に、被測定者Mの舌表面に貼付された磁気ソース10の相対座標を算出するものである。但し、第1相対座標算出手段71Aは、前記した第1相対座標算出手段71とは異なり、被測定者Mの顔表面に貼付された磁気センサ40の法線方向を加味して第1相対座標を算出する。
【0078】
ここで、被測定者Mの舌表面に貼付された磁気ソース10によって形成された磁場を磁気センサ40によって検出する場合、当該磁気センサ40の法線方向によって、すなわち磁気センサ40がどの方向を向いているかによって、検出される磁場の大きさが変化する。例えば、被測定者Mの口角に配置した磁気センサ40は、被測定者Mの表情が大きく変化すると、座標自体は同じでも法線方向が変化する場合があり、これにより被測定者Mの舌表面に貼付された磁気ソース10の位置が正確に算出できない場合がある。従って、磁気ソース10の相対座標をより正確に算出するには、この磁気センサ40の法線方向も加味する必要がある。第1実施形態に係るモーションキャプチャ装置1では、顔面および下の形状が概ね決まっていることを前提に近似解を得ているが、この手法の導入により、より正確な計算が可能となる。
【0079】
第1相対座標算出手段71Aは、具体的には、磁気センサ40から入力された磁気センサ信号に含まれる磁場の大きさを、磁気センサ40の法線方向ごとに予め算出された補正値によって補正することで、磁気ソース10の相対座標を算出する。これにより、磁気ソース10の相対座標をより正確に算出することができる。
【0080】
第1相対座標算出手段71Aには、図1および図6に示すように、プリアンプ50を介して、磁気センサ40から磁気センサ信号(タイムコードと対応付けられた磁気センサ信号)が入力される。そして、第1相対座標算出手段71Aは、前記した手法によって第1相対座標を算出し、図6に示すように、当該第1相対座標を第1絶対座標算出手段73に出力する。
【0081】
以上のような構成を備えるモーションキャプチャ装置1Aは、被測定者Mの顔表面の法線方向をモデル化した頭部モデルを用いることで磁気センサ40の法線方向を決定することができ、当該法線方向を加味して磁気ソース10の相対座標を算出することができる。
【0082】
これにより、モーションキャプチャ装置1Aによれば、被測定者Mの表情の変化に伴って磁気センサ40の法線方向が変化し、当該磁気センサ40の出力が変化した場合であっても、被測定者Mの舌の動きを正確に計測することができる。
【0083】
[第2実施形態の動作]
以下、モーションキャプチャ装置1Aの動作について、図7を参照(適宜図6も参照)しながら簡単に説明する。なお、以下の説明では、本実施形態の特徴である座標算出手段70Aにおける処理について説明し、それ以外の処理については詳細説明を省略する。
【0084】
まず、モーションキャプチャ装置1Aは、第2絶対座標算出手段72によって、複数の撮影装置60から入力された光学マーカ41の画像とカメラパラメータとに基づいて、被測定者Mの顔表面に貼付された磁気センサ40の絶対座標(第2絶対座標)を算出する(ステップS11)。次に、モーションキャプチャ装置1Aは、法線方向決定手段74によって、第2絶対座標算出手段72から入力された第2絶対座標と頭部モデルとに基づいて、当該第2絶対座標の法線方向を決定する(ステップS12)。次に、モーションキャプチャ装置1Aは、第1相対座標算出手段71Aによって、磁気センサ40から入力された磁気センサ信号と法線方向決定手段74から入力された第2絶対座標の法線方向とに基づいて、被測定者Mの舌表面に貼付された磁気ソース10の相対座標(第1相対座標)を算出する(ステップS13)。次に、モーションキャプチャ装置1Aは、第1絶対座標算出手段73によって、第1相対座標算出手段71Aから入力された第1相対座標と第2絶対座標算出手段72から入力された第2絶対座標とを加算して、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を(第1絶対座標)算出する(ステップS14)。
【0085】
このような動作により、モーションキャプチャ装置1Aは、被測定者Mの動作の制約が少ない状態で、被測定者Mの舌の動きをより正確かつ容易に計測することができる。
【0086】
[モーションキャプチャプログラム]
ここで、前記したモーションキャプチャ装置1,1Aの座標算出手段70,70Aは、一般的なコンピュータを、前記した各手段として機能させるプログラムにより動作させることで実現することができる。このプログラムは、通信回線を介して配布することも可能であるし、CD−ROM等の記録媒体に書き込んで配布することも可能である。
【0087】
以上、本発明に係るモーションキャプチャ装置およびモーションキャプチャプログラムについて、発明を実施するための形態により具体的に説明したが、本発明の趣旨はこれらの記載に限定されるものではなく、特許請求の範囲の記載に基づいて広く解釈されなければならない。また、これらの記載に基づいて種々変更、改変等したものも本発明の趣旨に含まれることはいうまでもない。
【0088】
例えば、前記したモーションキャプチャ装置1,1Aは、被測定者Mの舌表面に磁気ソース10が貼付され、被測定者Mの顔表面に磁気センサ40が貼付されることを前提にしていたが、これらが逆でも構わない。この場合、第1相対座標算出手段71は、磁気センサ40によって検出された磁場の大きさから、被測定者Mの舌表面に貼付された磁気センサ40の相対座標(第1相対座標)を算出する。また、第2絶対座標算出手段72は、複数の撮影装置60によって撮影された光学マーカ41の画像から、当該光学マーカ41と同一の位置に配置された磁気ソース10の絶対座標(第2絶対座標)を算出し、第1絶対座標算出手段73が、第1相対座標に第2絶対座標を加算することで、被測定者Mの舌表面に貼付された磁気センサ40の絶対座標(第1絶対座標)を算出する。
【0089】
これにより、モーションキャプチャ装置1は、磁気センサ40を被測定者Mの舌表面に貼付し、磁気ソース10を被測定者Mの顔表面に貼付した場合において、計測中に被測定者Mの表情が変化した場合であっても、被測定者Mの舌表面に貼付された磁気センサ40の正確な絶対位置を算出することができる。また、このようなモーションキャプチャ装置1によれば、被測定者Mの湿った口内(舌表面)に励磁電流が供給される磁気ソース10を貼付する必要がないため、磁気ソース10を舌表面に貼付する場合よりも被測定者Mの舌の動きを安全に計測することができる。
【0090】
また、前記したモーションキャプチャ装置1,1Aは、手話における舌の動きを計測することを前提にしていたが、被測定者Mの舌以外の部位に磁気ソース10を貼付することで、被測定者Mの舌以外の動きを計測することも当然可能である。従って、モーションキャプチャ装置1,1Aは、手話のみならず他の分野にも広く応用することができる。
【0091】
また、前記したモーションキャプチャ装置1,1Aは、被測定者Mの顔表面にのみに光学マーカ41を貼付していたが、被測定者Mの身体の他の部位に光学マーカ41を貼付し、被測定者Mの全身の光学モーションキャプチャも併せて行っても構わない。
【0092】
また、前記したモーションキャプチャ装置1,1Aは、座標算出手段70によって、リアルタイムで被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出することを前提としていたが、リアルタイムでなくても構わない。すなわち、前記したように、磁気センサ40によって生成される磁気センサ信号と、撮影装置60によって生成される画像データには、それぞれタイムコードが対応づけられているため、これらの測定値を全て図示しない記憶手段に記憶した後に計算を実施し、オフライン処理で結果を求めても構わない。
【0093】
また、前記したモーションキャプチャ装置1,1Aは、図4および図6に示すように、座標算出手段70,70Aの中に第2絶対座標算出手段72を含めて説明したが、光学モーションキャプチャを行うものとして、当該第2絶対座標算出手段72を座標算出手段70,70Aとは別のものとして構成しても構わない。
【符号の説明】
【0094】
1,1A モーションキャプチャ装置
10 磁気ソース
20 発振器
30 絶縁アンプ
40 磁気センサ
41 光学マーカ
50 プリアンプ
60 撮影装置
70,70A 座標算出手段
71,71A 第1相対座標算出手段
72 第2絶対座標算出手段
73 第1絶対座標算出手段
74 法線方向決定手段
M 被測定者
【特許請求の範囲】
【請求項1】
被測定者の顔表面または舌表面の一方に貼付される磁気ソースと、
前記被測定者の顔表面または舌表面の他方に貼付され、前記磁気ソースによって形成される磁場を検出する磁気センサと、
前記被測定者の顔表面に貼付された前記磁気ソースまたは前記磁気センサと同一の位置に配置された光学マーカと、
前記光学マーカを異なる位置および異なる方向から撮影する複数の撮影装置と、
前記磁気センサによって検出された磁場と、前記撮影装置によって撮影された画像とから、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの座標を算出する座標算出手段と、からなり、
前記座標算出手段は、
前記磁気センサによって検出された磁場の大きさから、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの相対的な座標を示す第1相対座標を算出する第1相対座標算出手段と、
前記複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された前記磁気ソースまたは前記磁気センサの絶対的な座標を示す第2絶対座標を算出する第2絶対座標算出手段と、
前記第1相対座標に前記第2絶対座標を加算することで、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの絶対的な座標を示す第1絶対座標を算出する第1絶対座標算出手段と、
を備えることを特徴とするモーションキャプチャ装置。
【請求項2】
前記磁気ソースは、電磁石からなるとともに、前記被測定者の顔表面または舌表面に複数貼付され、
前記磁気センサは、前記被測定者の顔表面または舌表面に複数貼付され、
当該複数の磁気ソースのそれぞれには、異なる周波数の励磁電流が供給され、
前記第1相対座標算出手段は、前記磁気センサによって検出された複数の磁場のそれぞれについて周波数分離を行うことで、各々の磁気ソースによって形成される磁場を分離し、当該分離された磁場の大きさから前記第1相対座標を算出することを特徴とする請求項1に記載のモーションキャプチャ装置。
【請求項3】
前記被測定者の顔表面の法線方向をモデル化した前記被測定者の頭部モデルに前記第2絶対座標を当てはめることで、当該第2絶対座標に対応する前記磁気ソースまたは前記磁気センサの前記被測定者の顔表面に対する法線方向を決定する法線方向決定手段を備え、
前記第1相対座標算出手段は、前記磁気センサによって検出された磁場の大きさと、前記磁気センサまたは前記磁気ソースの法線方向とから、前記第1相対座標を算出することを特徴とする請求項1または請求項2に記載のモーションキャプチャ装置。
【請求項4】
前記磁気ソースは、前記被測定者の舌表面に貼付され、
前記磁気センサは、前記被測定者の顔表面に貼付され、
前記第1相対座標算出手段は、前記磁気センサによって検出された磁場の大きさから、前記被測定者の舌表面に貼付された前記磁気ソースの第1相対座標を算出し、
前記第2絶対座標算出手段は、前記複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された前記磁気センサの前記第2絶対座標を算出し、
前記第1絶対座標算出手段は、前記第1相対座標に前記第2絶対座標を加算することで、前記被測定者の舌表面に貼付された前記磁気ソースの前記第1絶対座標を算出することを特徴とする請求項1から請求項3のいずれか一項に記載のモーションキャプチャ装置。
【請求項5】
前記被測定者の舌表面に配置された前記磁気ソースに一端が接続され、他端が前記被測定者の口外に露出された所定長さの紐部材を備え、
前記磁気ソースは、永久磁石からなるとともに、前記紐部材の一端が接続されることを特徴とする請求項4に記載のモーションキャプチャ装置。
【請求項6】
前記磁気ソースは、前記被測定者の顔表面に貼付され、
前記磁気センサは、前記被測定者の舌表面に貼付され、
前記第1相対座標算出手段は、前記磁気センサによって検出された磁場の大きさから、前記被測定者の舌表面に貼付された前記磁気センサの第1相対座標を算出し、
前記第2絶対座標算出手段は、前記複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された前記磁気ソースの前記第2絶対座標を算出し、
前記第1絶対座標算出手段は、前記第1相対座標に前記第2絶対座標を加算することで、前記被測定者の舌表面に貼付された前記磁気センサの前記第1絶対座標を算出することを特徴とする請求項1から請求項3のいずれか一項に記載のモーションキャプチャ装置。
【請求項7】
被測定者の顔表面または舌表面の一方に貼付される磁気ソースと、前記被測定者の顔表面または舌表面の他方に貼付され、前記磁気ソースによって形成される磁場を検出する磁気センサと、前記顔表面に貼付された前記磁気ソースまたは前記センサと同一の位置に配置された光学マーカと、前記光学マーカを異なる位置および異なる方向から撮影する複数の撮影装置と、からなるモーションキャプチャ装置において、前記磁気センサによって検出された磁場と、前記撮影装置によって撮影された画像とから、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの座標を算出するために、コンピュータを、
前記磁気センサによって検出された磁場の大きさから、当該磁気センサを基準とした前記磁気ソースの相対的な座標を示す第1相対座標を算出する第1相対座標算出手段、
前記複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された前記磁気ソースまたは前記磁気センサの絶対的な座標を示す第2絶対座標を算出する第2絶対座標算出手段、
前記第1相対座標に前記第2絶対座標を加算することで、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの絶対的な座標を示す第1絶対座標を算出する第1絶対座標算出手段、
として機能させるためのモーションキャプチャプログラム。
【請求項1】
被測定者の顔表面または舌表面の一方に貼付される磁気ソースと、
前記被測定者の顔表面または舌表面の他方に貼付され、前記磁気ソースによって形成される磁場を検出する磁気センサと、
前記被測定者の顔表面に貼付された前記磁気ソースまたは前記磁気センサと同一の位置に配置された光学マーカと、
前記光学マーカを異なる位置および異なる方向から撮影する複数の撮影装置と、
前記磁気センサによって検出された磁場と、前記撮影装置によって撮影された画像とから、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの座標を算出する座標算出手段と、からなり、
前記座標算出手段は、
前記磁気センサによって検出された磁場の大きさから、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの相対的な座標を示す第1相対座標を算出する第1相対座標算出手段と、
前記複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された前記磁気ソースまたは前記磁気センサの絶対的な座標を示す第2絶対座標を算出する第2絶対座標算出手段と、
前記第1相対座標に前記第2絶対座標を加算することで、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの絶対的な座標を示す第1絶対座標を算出する第1絶対座標算出手段と、
を備えることを特徴とするモーションキャプチャ装置。
【請求項2】
前記磁気ソースは、電磁石からなるとともに、前記被測定者の顔表面または舌表面に複数貼付され、
前記磁気センサは、前記被測定者の顔表面または舌表面に複数貼付され、
当該複数の磁気ソースのそれぞれには、異なる周波数の励磁電流が供給され、
前記第1相対座標算出手段は、前記磁気センサによって検出された複数の磁場のそれぞれについて周波数分離を行うことで、各々の磁気ソースによって形成される磁場を分離し、当該分離された磁場の大きさから前記第1相対座標を算出することを特徴とする請求項1に記載のモーションキャプチャ装置。
【請求項3】
前記被測定者の顔表面の法線方向をモデル化した前記被測定者の頭部モデルに前記第2絶対座標を当てはめることで、当該第2絶対座標に対応する前記磁気ソースまたは前記磁気センサの前記被測定者の顔表面に対する法線方向を決定する法線方向決定手段を備え、
前記第1相対座標算出手段は、前記磁気センサによって検出された磁場の大きさと、前記磁気センサまたは前記磁気ソースの法線方向とから、前記第1相対座標を算出することを特徴とする請求項1または請求項2に記載のモーションキャプチャ装置。
【請求項4】
前記磁気ソースは、前記被測定者の舌表面に貼付され、
前記磁気センサは、前記被測定者の顔表面に貼付され、
前記第1相対座標算出手段は、前記磁気センサによって検出された磁場の大きさから、前記被測定者の舌表面に貼付された前記磁気ソースの第1相対座標を算出し、
前記第2絶対座標算出手段は、前記複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された前記磁気センサの前記第2絶対座標を算出し、
前記第1絶対座標算出手段は、前記第1相対座標に前記第2絶対座標を加算することで、前記被測定者の舌表面に貼付された前記磁気ソースの前記第1絶対座標を算出することを特徴とする請求項1から請求項3のいずれか一項に記載のモーションキャプチャ装置。
【請求項5】
前記被測定者の舌表面に配置された前記磁気ソースに一端が接続され、他端が前記被測定者の口外に露出された所定長さの紐部材を備え、
前記磁気ソースは、永久磁石からなるとともに、前記紐部材の一端が接続されることを特徴とする請求項4に記載のモーションキャプチャ装置。
【請求項6】
前記磁気ソースは、前記被測定者の顔表面に貼付され、
前記磁気センサは、前記被測定者の舌表面に貼付され、
前記第1相対座標算出手段は、前記磁気センサによって検出された磁場の大きさから、前記被測定者の舌表面に貼付された前記磁気センサの第1相対座標を算出し、
前記第2絶対座標算出手段は、前記複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された前記磁気ソースの前記第2絶対座標を算出し、
前記第1絶対座標算出手段は、前記第1相対座標に前記第2絶対座標を加算することで、前記被測定者の舌表面に貼付された前記磁気センサの前記第1絶対座標を算出することを特徴とする請求項1から請求項3のいずれか一項に記載のモーションキャプチャ装置。
【請求項7】
被測定者の顔表面または舌表面の一方に貼付される磁気ソースと、前記被測定者の顔表面または舌表面の他方に貼付され、前記磁気ソースによって形成される磁場を検出する磁気センサと、前記顔表面に貼付された前記磁気ソースまたは前記センサと同一の位置に配置された光学マーカと、前記光学マーカを異なる位置および異なる方向から撮影する複数の撮影装置と、からなるモーションキャプチャ装置において、前記磁気センサによって検出された磁場と、前記撮影装置によって撮影された画像とから、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの座標を算出するために、コンピュータを、
前記磁気センサによって検出された磁場の大きさから、当該磁気センサを基準とした前記磁気ソースの相対的な座標を示す第1相対座標を算出する第1相対座標算出手段、
前記複数の撮影装置によって撮影された前記光学マーカの画像から、当該光学マーカと同一の位置に配置された前記磁気ソースまたは前記磁気センサの絶対的な座標を示す第2絶対座標を算出する第2絶対座標算出手段、
前記第1相対座標に前記第2絶対座標を加算することで、前記被測定者の舌表面に貼付された前記磁気ソースまたは前記磁気センサの絶対的な座標を示す第1絶対座標を算出する第1絶対座標算出手段、
として機能させるためのモーションキャプチャプログラム。
【図1】


【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図3】

【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図3】
【公開番号】特開2013−34510(P2013−34510A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−170560(P2011−170560)
【出願日】平成23年8月3日(2011.8.3)
【出願人】(000004352)日本放送協会 (2,206)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月3日(2011.8.3)
【出願人】(000004352)日本放送協会 (2,206)
【Fターム(参考)】
[ Back to top ]