
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、工作機械の送り軸やロボットなどに使用されるサーボモータによる制御装置の負荷イナーシャを推定するためのモータの負荷イナーシャ推定方法に関するものである。
【背景技術】
【0002】
図3は、負荷イナーシャの推定値を用いてオートチューニングを行う公知のモータの速度制御装置の構成を示している。この制御装置は、モータMの回転をエンコーダ3で検出する。速度算出器4は、エンコーダ3の出力に基づいて速度を算出し、加速度算出器5は算出した速度に基いて加速度を算出して加速度フィードバック信号を出力する。速度制御器1は、速度算出器4から出力された速度フィードバック信号と速度指令信号との差信号が0になるようにトルク指令を出力し、このトルク指令に基いてトルク制御部2はモータMを駆動する。モータMの負荷のイナーシャを推定するイナーシャ推定器6は、加速度算出器5が出力する加速度フィードバック信号と速度制御器1から出力されるトルク指令信号とを入力として負荷のイナーシャを推定し、推定結果をゲイン調整器7に出力する。ゲイン調整器7は、推定されたイナーシャに基づいて速度制御器1のゲインが適正な値になるようにゲイン調整を行う。
【0003】
図4は、図3の装置に示した従来のイナーシャ推定器の構成を示す図である。なお図4の構成は、実際には、ソフトウエアによって構成されている。図3に示すイナーシャ推定器で用いているイナーシャ推定方法については、電気学会論文誌Vol.114−D、No.4、’94の424〜431頁に「低精度エンコーダを用いるサーボモータの高性能制御−瞬時速度オブザーバと慣性モーメントの同定」と題する論文に詳しく説明されている。この論文に記載の技術では、慣性モーメント即ちイナーシャを、速度制御装置のトルク指令と加速度フィードバックとを入力とし、イナーシャ推定ゲインKnを逐次最小2乗法を用いて決定している。図4の構成では、加速度フィードバック信号をローパスフィルタLPFに通した値と前回の加速度フィードバック信号をローパスフィルタに通した値との差分Δanと、前回のイナーシャ推定値Jn−1との乗算値Δan・Jn−1から得たトルクフィードバック差分ΔTnを求める。またトルク指令信号をローパスフィルタLPFを通した値と前回のトルク指令信号をローパスフィルタLPFに通した値との差分ΔTcnを求める。そしてトルクフィードバック差分ΔTnと前述の差分ΔTcnとの差を誤差en=ΔTcn−ΔTnとして求める。最後に、この誤差enにイナーシャ推定ゲインKnを乗算して得た値en・Knを前回推定したイナーシャ推定値Jn−1に加算して今回のイナーシャ推定値Jnを求める。このイナーシャの推定は、モータの制御の間、所定のサンプリング周期で逐次求められている。そして誤差enが小さくなるようにイナーシャJnが推定されていく。なおイナーシャ推定ゲインKnは、Kn=(Pn−1Δan)/(λ+Pn−1Δan2)によって求めている。ここでPnは係数誤差相関であり、Pn=Pn−1/(λ+Pn−1Δan2)として表される。ここでλは忘却係数を表す。
【0004】
オートチューニングでは、このイナーシャ推定値Jnに基づいて、速度制御器1のゲインを定め、イナーシャが変動しても安定に動作する。なお速度制御の上位として位置制御が構成される場合には、イナーシャ推定値に基づいて位置制御器のゲインを決めることも可能である。
【非特許文献1】電気学会論文誌Vol.114−D、No.4、’94の424〜431頁、「低精度エンコーダを用いるサーボモータの高性能制御−瞬時速度オブザーバと慣性モーメントの同定」
【発明の開示】
【発明が解決しようとする課題】
【0005】
逐次最小2乗法を用いてイナーシャ推定ゲインKnを求めると、重力や、一定負荷などの外乱は、逐次最小2乗法によりその影響が小さくなる。図4に示す構成では、トルク指令信号や加速度フィードバック信号の差分値を用いて誤差enを検出するため、加速度の変化点である加速開始時や、加速終了時、あるいは減速開始時や減速終了時において、高いゲインKnを用いてイナーシャが推定される。しかし、モータのコギングトルクが大きい場合や、機械系に振動がある場合に、この振動が加速度フィードバックにも現れる。そして、その周期がイナーシャ推定装置のサンプリング周波数に近い場合に、イナーシャ推定部がその影響を受けて、イナーシャ推定値が本来の値と異なった値に推定されてしまうという問題があった。
【0006】
本発明は、上記課題を解消するためになされたものであり、その目的は、モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供することにある。
【課題を解決するための手段】
【0007】
本発明のモータの負荷イナーシャ推定方法では、次のようにしてイナーシャを推定する。まず加速度フィードバック信号をフィルタに通した値と前回の加速度フィードバック信号をフィルタに通した値との差分Δanと前回のイナーシャ推定値Jn−1との乗算値Δan・Jn−1から得たトルクフィードバック差分ΔTnを求める。次にトルク指令信号をフィルタに通した値と前回のトルク指令信号をフィルタに通した値との差分ΔTcnとの差から誤差enを求める。そして誤差enにイナーシャ推定ゲインKnを乗算した値en・Knを前回推定したイナーシャ推定値Jn−1に加算して今回のイナーシャ推定値Jnを求める。
【0008】
なお加速度フィードバック信号をハイパスフィルタに通した値Δbと前回のイナーシャ推定値Jn−1との乗算値Δb・Jn−1から得たトルクフィードバック差分ΔTnと、トルク指令信号をハイパスフィルタに通した値ΔTbとの差分から誤差enを求めることもできる。
【0009】
本発明においては、特に、加速度フィードバック信号の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。このようにするとモータのコギングトルクが大きい場合や、負荷の機械系に共振などがあって発生する振動を検出し、この振動が予め定めたレベル以上ある間は、イナーシャ推定ゲインKnを小さくする係数αを推定ゲインKnに乗算することになり、振動成分の影響を小さくすることができる。最も影響を少なくする場合には、係数αを0にすると、推定するイナーシャは前回のイナーシャ推定値Jn−1になる。係数αを0以上1未満のいずれの値にするかは、試験によって定めることができる。振動があまり大きくない状況では、係数αが1になるため、従来と同様にしてイナーシャが推定される。
【0010】
なおイナーシャ推定ゲインKnは、従来と同様に、逐次最小2乗法または固定トレース法を用いて決定されるのが好ましい。
【0011】
また振動は、次のようにして検出する。まず加速度フィードバック信号の差分値を絶対値化したn回分のサンプリング値をn回移動平均フィルタに通した値を求める。そして加速度フィードバック信号の差分値のn回分のサンプリング値を、n回移動平均フィルタに通して得た値を絶対値化した値を求める。そしてこれら二つの値の差分を求め、この差分が閾値以上あるか否かにより、振動が予め定めたレベル以上あるか否かを判定する。このようにして、振動状態を検出する。
【0012】
なおn回分のサンプリング値を、何回にするかは、状況に応じて任意に定めることになるが、イナーシャ推定部のサンプリングのn回分のサンプリング値を取得することが好ましい。一般的には、nを2〜32の値のいずれかの値にすることができる。
【発明の効果】
【0013】
本発明によれば、加速度フィードバック信号中に現れる振動が予め定めたレベル以上ある間は、イナーシャ推定ゲインKnを小さくする係数αを推定ゲインKnに乗算することにより、イナーシャ推定における振動の影響を小さくして、イナーシャの推定精度を高くすることができる。そのため、本発明の方法によりイナーシャを推定すると、モータのコギングトルクが大きい場合や、機械系に振動があっても、イナーシャ推定値がその影響を受けづらくなる。その結果、従来と比較して安定したイナーシャの推定をすることができ、また推定値を使用するオートチューニング装置の動作も格段に安定化される。
【発明を実施するための最良の形態】
【0014】
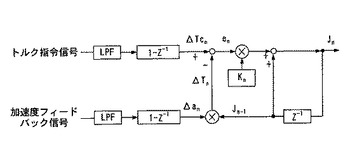
図1は、本発明のモータの負荷イナーシャ推定方法を実施するイナーシャ推定装置の実施例の構成を示す図である。この構成では、加速度フィードバック信号をローパスフィルタ11に通した値と前回の加速度フィードバック信号をローパスフィルタに通した値(1−Z−1)との差分Δanを差分演算手段12で求める。ここで1−Z−1は、今回の値と前回の値との差分を取ることを意味する。そしてこの差分Δanと、前回のイナーシャ推定値Jn−1との乗算値Δan・Jn−1から得たトルクフィードバック差分ΔTnを求める。前回のイナーシャ推定値Jn−1は推定値記憶手段13に記憶されて、乗算は乗算手段14で実行される。
【0015】
またトルク指令信号をローパスフィルタ10を通した値と前回のトルク指令信号をローパスフィルタ10に通した値との差分ΔTcnを差分演算手段15で求める。そしてこの差分ΔTcnとトルクフィードバック差分ΔTnとの差を、減算手段16により、誤差en=ΔTcn−ΔTnとして求める。乗算手段17は、この誤差enに、係数αをイナーシャ推定ゲインKnに乗算して、en・α・Knを出力する。イナーシャ推定ゲインKnは、従来と同様にして、ゲイン推定手段18において、逐次最小2乗法を用いて次の式で決定される。
【0016】
Kn=(Pn−1Δan)/(λ+Pn−1Δan2)
上記式において、Pnは、係数誤差相関であり、Pn=Pn−1/(λ+Pn−1Δan2)として表される。ここでλは忘却係数を表す。
【0017】
係数αをイナーシャ推定ゲインKnに乗算して出力する係数決定手段19は、加速度フィードバック信号の振動を検出する機能を有している。そして係数決定手段19は、振動区間における振動が予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。また係数決定手段19は、振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
【0018】
加算手段20は、乗算手段17から出力された値en・α・Knと前回推定したイナーシャ推定値Jn−1を加算して今回のイナーシャ推定値Jnを求める。このイナーシャの推定は、モータの制御の間、所定のサンプリング周期で逐次求められる。そして誤差enが小さくなるようにイナーシャJnが推定される。
【0019】
図2は、係数決定手段19の一例の構成を示す図である。この例では、まず加速度フィードバック信号の差分値Δanを絶対値化したn(=8)回分のサンプリング値をn(=8)回移動平均フィルタに通した値を求める。ここで加速度フィードバック信号の差分値とは、前回の加速度フィードバック信号をローパスフィルタに通した値と今回の加速度フィードバック信号をローパスフィルタに通した値との差である。 またこの例では、加速度フィードバック信号の差分値Δanのn回分のサンプリング値を、n回移動平均フィルタに通して得た値を絶対値化した値を求める。
【0020】
そして図2の例では、これら二つの値の差分を減算手段21で求め、この差分を比較器22で閾値と比較する。そしてこの差分が閾値以上あるか否かにより、振動が予め定めたレベル以上あるか否かを判定する。すなわち差分が閾値以上であれば、振動は予め定めレベル以上あることを意味し、差分が閾値より小さければ、振動が予め定めたレベルより小さいことを意味する。α算出手段23は、比較器22の出力に応じて、前述のαを決定する。
【0021】
具体的には、差分が閾値より以上あれば、α=G1(ただし、0≦G1<1)、差分が閾値より小さければα=1とする。このようにすることにより、振動を検出することができる。そしてこのような振動が検出された場合に、イナーシャ推定器のゲインKnを低減させてイナーシャを推定することができるようになり、イナーシャ推定値に対する振動の影響を抑制することができる。特にモータのコギングトルクが大きい場合は、モータ停止付近で、イナーシャ推定値が影響を受けて変動しやすくなるが、本手法によれば、コギングトルクによりモータに振動が現れると、加速度フィードバック信号中に現れる振動を検出してイナーシャ推定ゲインを下げるので、その影響を小さくすることができる。また、同様にして、機械系の剛性が低く、機械系が振動している場合も、加速度フィードバック信号中に現れる振動が検出され、イナーシャ推定ゲインを下げるので、その影響を小さくすることができる。
【0022】
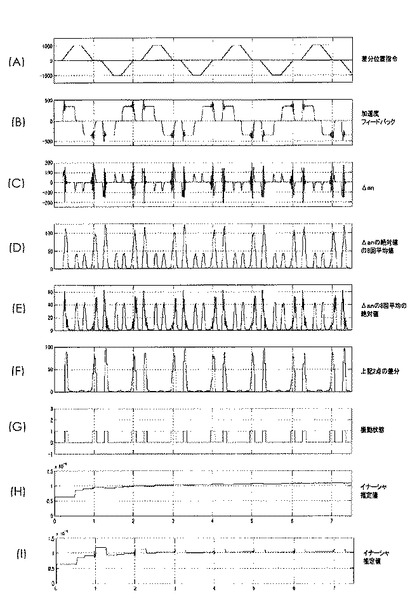
なお、移動平均フィルタの平均回数は、2回から32回程度とし、イナーシャ推定に及ぼす影響の大きい加速度フィードバック中の振動を検出する。また閾値も試験によって予めその値を決めておけばよい。一般的には、10rad/sec2程度の値が用いられる。 図5(A)乃至(I)は、図1のイナーシャ推定装置を図3の制御装置に適用して、コギングトルクの大きなモータを駆動した場合のイナーシャ推定動作をシミュレーションしたものである。図5(A)は、モータの制御装置に入力される差分位置指令である。また図5(B)は、加速度フィードバック信号を示している。図5(B)を見ると判るように、加速開始時及び減速終了時にコギングトルクに基く振動(振動成分)が加速度フィードバック信号中に現れている。図5(C)は、加速度フィードバック信号をローパスフィルタ11に通した値と前回の加速度フィードバック信号をローパスフィルタに通した値(1−Z−1)との差分Δanである。図5(C)において大きく表れている波形が振動成分である。そして図5(D)は、差分Δanの絶対値の8回平均値であり、図5(E)は差分Δanの8回平均値の絶対値を示している。そして図5(F)は、図5(D)の値と図5(E)の値の差分を示している。図5(G)は、この差分を比較器22で閾値と比較した結果を示している。したがって図5(G)は、振動状態が継続している振動区間を示している。図5(H)は、振動区間において、係数αが0以上1未満の値となって、イナーシャ推定ゲインKnを小さくしたときのイナーシャ推定値を示している。比較のために、図5(I)には、振動区間において、係数αを1にした場合(従来の場合)における、イナーシャ推定値を示す。図5(H)及び(I)を比較すると明らかなように、本発明のイナーシャ推定方法を用いた場合には、イナーシャ推定値に加速度フィードバック信号中の振動の影響が実質的に現れていない。しかし、従来の推定方法では、モータの加速開始付近や減速終了付近に現れるモータのコギングトルクによる加速度フィードバック信号中の振動の影響で、イナーシャ推定値には変動が現れている。
【0023】
上記実施の形態では、振動を閾値を用いて判別しているが、振動の大きさに応じてαを算出するようにしてもよい。
【0024】
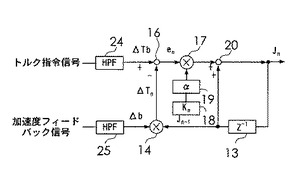
また図6に示すように誤差enを求めるにあたって、図1の構成で用いたローパスフィルタ10及び11と差分演算手段12及び15に代えて、ハイパスフィルタ24及び25を用いて、加速フィードバック信号及びトルク指令信号をハイパスフィルタ処理することにより、図1に示した差分Δan及びΔTcnに相当する値Δb及びΔTbを得るようにしてもよい。このようにした場合でも、その後の処理は、図1の例と同様であるので説明は省略する。
【図面の簡単な説明】
【0025】
【図1】本発明のモータの負荷イナーシャ推定方法を実施するイナーシャ推定装置の実施例の構成を示す図である。
【図2】係数決定手段の一例の構成を示す図である。
【図3】負荷イナーシャの推定値を用いてオートチューニングを行う公知のモータの速度制御装置の構成を示している。
【図4】図3の装置に示した従来のイナーシャ推定器の構成を示す図である。
【図5】(A)乃至(I)は、図1のイナーシャ推定装置を図3の制御装置に適用して、コギングトルクの大きなモータを駆動した場合のイナーシャ推定動作をシミュレーションした結果を説明するために用いる波形図である。
【図6】本発明のモータの負荷イナーシャ推定方法を実施するイナーシャ推定装置の他の実施例の構成を示す図である。
【符号の説明】
【0026】
1 速度制御器
2 トルク制御部
3 エンコーダ
4 速度算出器
5 加速度算出器
6 イナーシャ制御器
7 ゲイン調整器
【技術分野】
【0001】
本発明は、工作機械の送り軸やロボットなどに使用されるサーボモータによる制御装置の負荷イナーシャを推定するためのモータの負荷イナーシャ推定方法に関するものである。
【背景技術】
【0002】
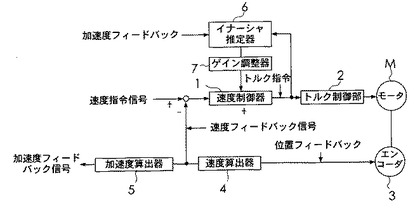
図3は、負荷イナーシャの推定値を用いてオートチューニングを行う公知のモータの速度制御装置の構成を示している。この制御装置は、モータMの回転をエンコーダ3で検出する。速度算出器4は、エンコーダ3の出力に基づいて速度を算出し、加速度算出器5は算出した速度に基いて加速度を算出して加速度フィードバック信号を出力する。速度制御器1は、速度算出器4から出力された速度フィードバック信号と速度指令信号との差信号が0になるようにトルク指令を出力し、このトルク指令に基いてトルク制御部2はモータMを駆動する。モータMの負荷のイナーシャを推定するイナーシャ推定器6は、加速度算出器5が出力する加速度フィードバック信号と速度制御器1から出力されるトルク指令信号とを入力として負荷のイナーシャを推定し、推定結果をゲイン調整器7に出力する。ゲイン調整器7は、推定されたイナーシャに基づいて速度制御器1のゲインが適正な値になるようにゲイン調整を行う。
【0003】
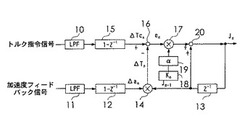
図4は、図3の装置に示した従来のイナーシャ推定器の構成を示す図である。なお図4の構成は、実際には、ソフトウエアによって構成されている。図3に示すイナーシャ推定器で用いているイナーシャ推定方法については、電気学会論文誌Vol.114−D、No.4、’94の424〜431頁に「低精度エンコーダを用いるサーボモータの高性能制御−瞬時速度オブザーバと慣性モーメントの同定」と題する論文に詳しく説明されている。この論文に記載の技術では、慣性モーメント即ちイナーシャを、速度制御装置のトルク指令と加速度フィードバックとを入力とし、イナーシャ推定ゲインKnを逐次最小2乗法を用いて決定している。図4の構成では、加速度フィードバック信号をローパスフィルタLPFに通した値と前回の加速度フィードバック信号をローパスフィルタに通した値との差分Δanと、前回のイナーシャ推定値Jn−1との乗算値Δan・Jn−1から得たトルクフィードバック差分ΔTnを求める。またトルク指令信号をローパスフィルタLPFを通した値と前回のトルク指令信号をローパスフィルタLPFに通した値との差分ΔTcnを求める。そしてトルクフィードバック差分ΔTnと前述の差分ΔTcnとの差を誤差en=ΔTcn−ΔTnとして求める。最後に、この誤差enにイナーシャ推定ゲインKnを乗算して得た値en・Knを前回推定したイナーシャ推定値Jn−1に加算して今回のイナーシャ推定値Jnを求める。このイナーシャの推定は、モータの制御の間、所定のサンプリング周期で逐次求められている。そして誤差enが小さくなるようにイナーシャJnが推定されていく。なおイナーシャ推定ゲインKnは、Kn=(Pn−1Δan)/(λ+Pn−1Δan2)によって求めている。ここでPnは係数誤差相関であり、Pn=Pn−1/(λ+Pn−1Δan2)として表される。ここでλは忘却係数を表す。
【0004】
オートチューニングでは、このイナーシャ推定値Jnに基づいて、速度制御器1のゲインを定め、イナーシャが変動しても安定に動作する。なお速度制御の上位として位置制御が構成される場合には、イナーシャ推定値に基づいて位置制御器のゲインを決めることも可能である。
【非特許文献1】電気学会論文誌Vol.114−D、No.4、’94の424〜431頁、「低精度エンコーダを用いるサーボモータの高性能制御−瞬時速度オブザーバと慣性モーメントの同定」
【発明の開示】
【発明が解決しようとする課題】
【0005】
逐次最小2乗法を用いてイナーシャ推定ゲインKnを求めると、重力や、一定負荷などの外乱は、逐次最小2乗法によりその影響が小さくなる。図4に示す構成では、トルク指令信号や加速度フィードバック信号の差分値を用いて誤差enを検出するため、加速度の変化点である加速開始時や、加速終了時、あるいは減速開始時や減速終了時において、高いゲインKnを用いてイナーシャが推定される。しかし、モータのコギングトルクが大きい場合や、機械系に振動がある場合に、この振動が加速度フィードバックにも現れる。そして、その周期がイナーシャ推定装置のサンプリング周波数に近い場合に、イナーシャ推定部がその影響を受けて、イナーシャ推定値が本来の値と異なった値に推定されてしまうという問題があった。
【0006】
本発明は、上記課題を解消するためになされたものであり、その目的は、モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供することにある。
【課題を解決するための手段】
【0007】
本発明のモータの負荷イナーシャ推定方法では、次のようにしてイナーシャを推定する。まず加速度フィードバック信号をフィルタに通した値と前回の加速度フィードバック信号をフィルタに通した値との差分Δanと前回のイナーシャ推定値Jn−1との乗算値Δan・Jn−1から得たトルクフィードバック差分ΔTnを求める。次にトルク指令信号をフィルタに通した値と前回のトルク指令信号をフィルタに通した値との差分ΔTcnとの差から誤差enを求める。そして誤差enにイナーシャ推定ゲインKnを乗算した値en・Knを前回推定したイナーシャ推定値Jn−1に加算して今回のイナーシャ推定値Jnを求める。
【0008】
なお加速度フィードバック信号をハイパスフィルタに通した値Δbと前回のイナーシャ推定値Jn−1との乗算値Δb・Jn−1から得たトルクフィードバック差分ΔTnと、トルク指令信号をハイパスフィルタに通した値ΔTbとの差分から誤差enを求めることもできる。
【0009】
本発明においては、特に、加速度フィードバック信号の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。このようにするとモータのコギングトルクが大きい場合や、負荷の機械系に共振などがあって発生する振動を検出し、この振動が予め定めたレベル以上ある間は、イナーシャ推定ゲインKnを小さくする係数αを推定ゲインKnに乗算することになり、振動成分の影響を小さくすることができる。最も影響を少なくする場合には、係数αを0にすると、推定するイナーシャは前回のイナーシャ推定値Jn−1になる。係数αを0以上1未満のいずれの値にするかは、試験によって定めることができる。振動があまり大きくない状況では、係数αが1になるため、従来と同様にしてイナーシャが推定される。
【0010】
なおイナーシャ推定ゲインKnは、従来と同様に、逐次最小2乗法または固定トレース法を用いて決定されるのが好ましい。
【0011】
また振動は、次のようにして検出する。まず加速度フィードバック信号の差分値を絶対値化したn回分のサンプリング値をn回移動平均フィルタに通した値を求める。そして加速度フィードバック信号の差分値のn回分のサンプリング値を、n回移動平均フィルタに通して得た値を絶対値化した値を求める。そしてこれら二つの値の差分を求め、この差分が閾値以上あるか否かにより、振動が予め定めたレベル以上あるか否かを判定する。このようにして、振動状態を検出する。
【0012】
なおn回分のサンプリング値を、何回にするかは、状況に応じて任意に定めることになるが、イナーシャ推定部のサンプリングのn回分のサンプリング値を取得することが好ましい。一般的には、nを2〜32の値のいずれかの値にすることができる。
【発明の効果】
【0013】
本発明によれば、加速度フィードバック信号中に現れる振動が予め定めたレベル以上ある間は、イナーシャ推定ゲインKnを小さくする係数αを推定ゲインKnに乗算することにより、イナーシャ推定における振動の影響を小さくして、イナーシャの推定精度を高くすることができる。そのため、本発明の方法によりイナーシャを推定すると、モータのコギングトルクが大きい場合や、機械系に振動があっても、イナーシャ推定値がその影響を受けづらくなる。その結果、従来と比較して安定したイナーシャの推定をすることができ、また推定値を使用するオートチューニング装置の動作も格段に安定化される。
【発明を実施するための最良の形態】
【0014】
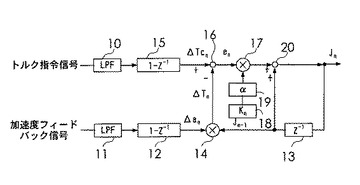
図1は、本発明のモータの負荷イナーシャ推定方法を実施するイナーシャ推定装置の実施例の構成を示す図である。この構成では、加速度フィードバック信号をローパスフィルタ11に通した値と前回の加速度フィードバック信号をローパスフィルタに通した値(1−Z−1)との差分Δanを差分演算手段12で求める。ここで1−Z−1は、今回の値と前回の値との差分を取ることを意味する。そしてこの差分Δanと、前回のイナーシャ推定値Jn−1との乗算値Δan・Jn−1から得たトルクフィードバック差分ΔTnを求める。前回のイナーシャ推定値Jn−1は推定値記憶手段13に記憶されて、乗算は乗算手段14で実行される。
【0015】
またトルク指令信号をローパスフィルタ10を通した値と前回のトルク指令信号をローパスフィルタ10に通した値との差分ΔTcnを差分演算手段15で求める。そしてこの差分ΔTcnとトルクフィードバック差分ΔTnとの差を、減算手段16により、誤差en=ΔTcn−ΔTnとして求める。乗算手段17は、この誤差enに、係数αをイナーシャ推定ゲインKnに乗算して、en・α・Knを出力する。イナーシャ推定ゲインKnは、従来と同様にして、ゲイン推定手段18において、逐次最小2乗法を用いて次の式で決定される。
【0016】
Kn=(Pn−1Δan)/(λ+Pn−1Δan2)
上記式において、Pnは、係数誤差相関であり、Pn=Pn−1/(λ+Pn−1Δan2)として表される。ここでλは忘却係数を表す。
【0017】
係数αをイナーシャ推定ゲインKnに乗算して出力する係数決定手段19は、加速度フィードバック信号の振動を検出する機能を有している。そして係数決定手段19は、振動区間における振動が予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。また係数決定手段19は、振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
【0018】
加算手段20は、乗算手段17から出力された値en・α・Knと前回推定したイナーシャ推定値Jn−1を加算して今回のイナーシャ推定値Jnを求める。このイナーシャの推定は、モータの制御の間、所定のサンプリング周期で逐次求められる。そして誤差enが小さくなるようにイナーシャJnが推定される。
【0019】
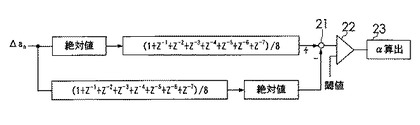
図2は、係数決定手段19の一例の構成を示す図である。この例では、まず加速度フィードバック信号の差分値Δanを絶対値化したn(=8)回分のサンプリング値をn(=8)回移動平均フィルタに通した値を求める。ここで加速度フィードバック信号の差分値とは、前回の加速度フィードバック信号をローパスフィルタに通した値と今回の加速度フィードバック信号をローパスフィルタに通した値との差である。 またこの例では、加速度フィードバック信号の差分値Δanのn回分のサンプリング値を、n回移動平均フィルタに通して得た値を絶対値化した値を求める。
【0020】
そして図2の例では、これら二つの値の差分を減算手段21で求め、この差分を比較器22で閾値と比較する。そしてこの差分が閾値以上あるか否かにより、振動が予め定めたレベル以上あるか否かを判定する。すなわち差分が閾値以上であれば、振動は予め定めレベル以上あることを意味し、差分が閾値より小さければ、振動が予め定めたレベルより小さいことを意味する。α算出手段23は、比較器22の出力に応じて、前述のαを決定する。
【0021】
具体的には、差分が閾値より以上あれば、α=G1(ただし、0≦G1<1)、差分が閾値より小さければα=1とする。このようにすることにより、振動を検出することができる。そしてこのような振動が検出された場合に、イナーシャ推定器のゲインKnを低減させてイナーシャを推定することができるようになり、イナーシャ推定値に対する振動の影響を抑制することができる。特にモータのコギングトルクが大きい場合は、モータ停止付近で、イナーシャ推定値が影響を受けて変動しやすくなるが、本手法によれば、コギングトルクによりモータに振動が現れると、加速度フィードバック信号中に現れる振動を検出してイナーシャ推定ゲインを下げるので、その影響を小さくすることができる。また、同様にして、機械系の剛性が低く、機械系が振動している場合も、加速度フィードバック信号中に現れる振動が検出され、イナーシャ推定ゲインを下げるので、その影響を小さくすることができる。
【0022】
なお、移動平均フィルタの平均回数は、2回から32回程度とし、イナーシャ推定に及ぼす影響の大きい加速度フィードバック中の振動を検出する。また閾値も試験によって予めその値を決めておけばよい。一般的には、10rad/sec2程度の値が用いられる。 図5(A)乃至(I)は、図1のイナーシャ推定装置を図3の制御装置に適用して、コギングトルクの大きなモータを駆動した場合のイナーシャ推定動作をシミュレーションしたものである。図5(A)は、モータの制御装置に入力される差分位置指令である。また図5(B)は、加速度フィードバック信号を示している。図5(B)を見ると判るように、加速開始時及び減速終了時にコギングトルクに基く振動(振動成分)が加速度フィードバック信号中に現れている。図5(C)は、加速度フィードバック信号をローパスフィルタ11に通した値と前回の加速度フィードバック信号をローパスフィルタに通した値(1−Z−1)との差分Δanである。図5(C)において大きく表れている波形が振動成分である。そして図5(D)は、差分Δanの絶対値の8回平均値であり、図5(E)は差分Δanの8回平均値の絶対値を示している。そして図5(F)は、図5(D)の値と図5(E)の値の差分を示している。図5(G)は、この差分を比較器22で閾値と比較した結果を示している。したがって図5(G)は、振動状態が継続している振動区間を示している。図5(H)は、振動区間において、係数αが0以上1未満の値となって、イナーシャ推定ゲインKnを小さくしたときのイナーシャ推定値を示している。比較のために、図5(I)には、振動区間において、係数αを1にした場合(従来の場合)における、イナーシャ推定値を示す。図5(H)及び(I)を比較すると明らかなように、本発明のイナーシャ推定方法を用いた場合には、イナーシャ推定値に加速度フィードバック信号中の振動の影響が実質的に現れていない。しかし、従来の推定方法では、モータの加速開始付近や減速終了付近に現れるモータのコギングトルクによる加速度フィードバック信号中の振動の影響で、イナーシャ推定値には変動が現れている。
【0023】
上記実施の形態では、振動を閾値を用いて判別しているが、振動の大きさに応じてαを算出するようにしてもよい。
【0024】
また図6に示すように誤差enを求めるにあたって、図1の構成で用いたローパスフィルタ10及び11と差分演算手段12及び15に代えて、ハイパスフィルタ24及び25を用いて、加速フィードバック信号及びトルク指令信号をハイパスフィルタ処理することにより、図1に示した差分Δan及びΔTcnに相当する値Δb及びΔTbを得るようにしてもよい。このようにした場合でも、その後の処理は、図1の例と同様であるので説明は省略する。
【図面の簡単な説明】
【0025】
【図1】本発明のモータの負荷イナーシャ推定方法を実施するイナーシャ推定装置の実施例の構成を示す図である。
【図2】係数決定手段の一例の構成を示す図である。
【図3】負荷イナーシャの推定値を用いてオートチューニングを行う公知のモータの速度制御装置の構成を示している。
【図4】図3の装置に示した従来のイナーシャ推定器の構成を示す図である。
【図5】(A)乃至(I)は、図1のイナーシャ推定装置を図3の制御装置に適用して、コギングトルクの大きなモータを駆動した場合のイナーシャ推定動作をシミュレーションした結果を説明するために用いる波形図である。
【図6】本発明のモータの負荷イナーシャ推定方法を実施するイナーシャ推定装置の他の実施例の構成を示す図である。
【符号の説明】
【0026】
1 速度制御器
2 トルク制御部
3 エンコーダ
4 速度算出器
5 加速度算出器
6 イナーシャ制御器
7 ゲイン調整器
【特許請求の範囲】
【請求項1】
加速度フィードバック信号をフィルタに通した値と前回の加速度フィードバック信号をフィルタに通した値との差分Δanと前回のイナーシャ推定値Jn−1との乗算値Δan・Jn−1から得たトルクフィードバック差分ΔTnと、トルク指令信号をフィルタに通した値と前回のトルク指令信号をフィルタに通した値との差分ΔTcnとの差から誤差enを求め、
前記誤差enにイナーシャ推定ゲインKnを乗算した値en・Knを前回推定したイナーシャ推定値Jn−1に加算して今回のイナーシャ推定値Jnを求めるモータの負荷イナーシャ推定方法であって、
前記加速度フィードバック信号中の振動が予め定めたレベル以上あるときには前記イナーシャ推定ゲインKnに0以上1未満の係数αを乗算し、前記振動が予め定めたレベルより小さいときには前記イナーシャ推定ゲインKnに1の係数αを乗算することを特徴とするモータの負荷イナーシャ推定方法。
【請求項2】
加速度フィードバック信号をハイパスフィルタに通した値Δbと前回のイナーシャ推定値Jn−1との乗算値Δb・Jn−1から得たトルクフィードバック差分ΔTnと、トルク指令信号をハイパスフィルタに通した値ΔTbとの差分から誤差enを求め、
前記誤差enにイナーシャ推定ゲインKnを乗算した値en・Knを前回推定したイナーシャ推定値Jn−1に加算して今回のイナーシャ推定値Jnを求め、
前記加速度フィードバック信号中の振動が予め定めたレベル以上あるときには前記イナーシャ推定ゲインKnに0以上1未満の係数αを乗算し、前記振動が予め定めたレベルより小さいときには前記イナーシャ推定ゲインKnに1の係数αを乗算することを特徴とするモータの負荷イナーシャ推定方法。
【請求項3】
前記イナーシャ推定ゲインKnは、逐次最小2乗法または固定トレース法を用いて決定されている請求項1または2に記載のモータの負荷イナーシャ推定方法。
【請求項4】
前記加速度フィードバック信号の差分値を絶対値化したn回分のサンプリング値をn回移動平均フィルタに通した値と、前記加速度フィードバック信号の差分値のn回分のサンプリング値をn回移動平均フィルタに通して得た値を絶対値化した値との差分を求め、前記差分が閾値以上あるか否かにより、前記振動状態が予め定めたレベル以上あるか否かを判定することを特徴とする請求項1に記載のモータの負荷イナーシャ推定方法。
【請求項5】
前記nが2〜32の値のいずれかの値である請求項4に記載の負荷イナーシャ推定方法。
【請求項1】
加速度フィードバック信号をフィルタに通した値と前回の加速度フィードバック信号をフィルタに通した値との差分Δanと前回のイナーシャ推定値Jn−1との乗算値Δan・Jn−1から得たトルクフィードバック差分ΔTnと、トルク指令信号をフィルタに通した値と前回のトルク指令信号をフィルタに通した値との差分ΔTcnとの差から誤差enを求め、
前記誤差enにイナーシャ推定ゲインKnを乗算した値en・Knを前回推定したイナーシャ推定値Jn−1に加算して今回のイナーシャ推定値Jnを求めるモータの負荷イナーシャ推定方法であって、
前記加速度フィードバック信号中の振動が予め定めたレベル以上あるときには前記イナーシャ推定ゲインKnに0以上1未満の係数αを乗算し、前記振動が予め定めたレベルより小さいときには前記イナーシャ推定ゲインKnに1の係数αを乗算することを特徴とするモータの負荷イナーシャ推定方法。
【請求項2】
加速度フィードバック信号をハイパスフィルタに通した値Δbと前回のイナーシャ推定値Jn−1との乗算値Δb・Jn−1から得たトルクフィードバック差分ΔTnと、トルク指令信号をハイパスフィルタに通した値ΔTbとの差分から誤差enを求め、
前記誤差enにイナーシャ推定ゲインKnを乗算した値en・Knを前回推定したイナーシャ推定値Jn−1に加算して今回のイナーシャ推定値Jnを求め、
前記加速度フィードバック信号中の振動が予め定めたレベル以上あるときには前記イナーシャ推定ゲインKnに0以上1未満の係数αを乗算し、前記振動が予め定めたレベルより小さいときには前記イナーシャ推定ゲインKnに1の係数αを乗算することを特徴とするモータの負荷イナーシャ推定方法。
【請求項3】
前記イナーシャ推定ゲインKnは、逐次最小2乗法または固定トレース法を用いて決定されている請求項1または2に記載のモータの負荷イナーシャ推定方法。
【請求項4】
前記加速度フィードバック信号の差分値を絶対値化したn回分のサンプリング値をn回移動平均フィルタに通した値と、前記加速度フィードバック信号の差分値のn回分のサンプリング値をn回移動平均フィルタに通して得た値を絶対値化した値との差分を求め、前記差分が閾値以上あるか否かにより、前記振動状態が予め定めたレベル以上あるか否かを判定することを特徴とする請求項1に記載のモータの負荷イナーシャ推定方法。
【請求項5】
前記nが2〜32の値のいずれかの値である請求項4に記載の負荷イナーシャ推定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−156699(P2007−156699A)
【公開日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願番号】特願2005−349266(P2005−349266)
【出願日】平成17年12月2日(2005.12.2)
【特許番号】特許第3796261号(P3796261)
【特許公報発行日】平成18年7月12日(2006.7.12)
【出願人】(000180025)山洋電気株式会社 (170)
【Fターム(参考)】
【公開日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願日】平成17年12月2日(2005.12.2)
【特許番号】特許第3796261号(P3796261)
【特許公報発行日】平成18年7月12日(2006.7.12)
【出願人】(000180025)山洋電気株式会社 (170)
【Fターム(参考)】
[ Back to top ]