
モーターロボット
【課題】 動作の意外性を有するモーターロボットを提供する。
【解決手段】 前輪12aとウエイト部30aとが第1の回転体になると共に、前輪12bとウエイト部30bとが第2の回転体となり、軸体27の回転によって、ウエイト部30a、30bに部分的に遠心力が生じる。すると、この遠心力によって前輪12a、12bと接続されている軸体27の軸方向に対して直交する方向に歪みが生じる。歪みが生じた軸体27が回転動作を続けると軸体27の歪みが振動発生源となり、軸体27を支持する車体3が振動することで、前バンパー4と後バンパー5とに振動が伝達される。これによって、モーターロボット1は脚体となる前バンパー4と後バンパー5とを介して、種々の方向へ移動することになる。
【解決手段】 前輪12aとウエイト部30aとが第1の回転体になると共に、前輪12bとウエイト部30bとが第2の回転体となり、軸体27の回転によって、ウエイト部30a、30bに部分的に遠心力が生じる。すると、この遠心力によって前輪12a、12bと接続されている軸体27の軸方向に対して直交する方向に歪みが生じる。歪みが生じた軸体27が回転動作を続けると軸体27の歪みが振動発生源となり、軸体27を支持する車体3が振動することで、前バンパー4と後バンパー5とに振動が伝達される。これによって、モーターロボット1は脚体となる前バンパー4と後バンパー5とを介して、種々の方向へ移動することになる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明はモーターロボットに関し、特に小学生等が使用する教材等に用いられるモーターロボットに関するものである。
【背景技術】
【0002】
従来のモーターロボットは、上下方向に伸びる胴体と、胴体内に配置される駆動装置と、胴体の下部に各々が平行となるように配置され、駆動装置と係合する一対の脚部と、胴体の上部に各々が平行となるように配置された一対の腕部と、胴体の上部に配置される頭部とを主に備えるものである。
【0003】
駆動装置と係合する一対の脚部は、駆動装置によって、例えば、脚部の各々が交互に前後運動することによって、モーターロボットを前進又は後退させる。更に、一対の腕部と駆動装置とを係合させると、脚部と腕部との両方が作動する。従って、より人間に近い歩行動作を有するものとなる。
【0004】
更に、駆動装置と一対の脚部との係合関係を変更することで、モーターロボットは様々な歩行動作をすることが可能となる。
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記のような従来のモーターロボットでは、モーターロボットが移動するためには、駆動装置と脚部とを直接係合させなければ、モーターロボットは移動することができないものとなっていた。即ち、駆動装置により脚部が直接作動することで、モーターロボットの移動がおこなわれていた。従って、モーターロボットの動きが予想の範囲となるため、動作の意外性という観点では面白みに欠けていた。
【0006】
この発明は、上記のような課題を解決するためになされたもので、動作の意外性を有するモーターロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、請求項1記載の発明は、モーターロボットであって、上下方向に配置された胴体と、胴体の下部に接続され、前後方向に対してほぼ平行に配置された一対のソリ状の脚体と、胴体に取付けられ、前後方向に対して直交するように水平方向に延びる軸体と、胴体に取付けられ、軸体を回転させるように駆動する駆動手段と、軸体の一方端部に接続され、軸体の回転に伴って回転する第1の回転体と、軸体の他方端部に接続され、軸体の回転に伴って回転する第2の回転体とを備え、第1の回転体と第2の回転体とは、軸体の回転によって軸体に加わる力を変化させることができるように構成されるものである。
【0008】
このように構成すると、第1の回転体と第2の回転体とによって軸体を介して胴体に加わる力が変化する。
【0009】
請求項2記載の発明は、請求項1記載の発明の構成において、第1の回転体は、軸体に接続される第1の回転部と、第1の回転部に固定され、回転によって第1の回転部を介して軸体に加わる力を変化させる第1のウエイト部を含み、第2の回転体は、軸体に接続される第2の回転部と、第2の回転部に固定され、回転によって第2の回転部を介して軸体に加わる力を変化させる第2のウエイト部を含むものである。
【0010】
このように構成すると、第1のウエイト部及び第2のウエイト部によって軸体に加わる力の変化の度合いが定まる。
【0011】
請求項3記載の発明は、請求項2記載の発明の構成において、第1の回転部は、軸体に対して回転位置を変えた状態で接続自在であり、タイヤ形状の第1の外輪部と、第1の外輪部に固定され、第1の開口を有する第1の受部とを含み、第1のウエイト部は、第1の受部の第1の開口に脱着自在に接続される第1の突出部と、第1の突出部に接続されたリング状の第1の重量部とを含み、第2の回転部は、軸体に対して回転位置を変えた状態で接続自在であり、タイヤ形状の第2の外輪部と、第2の外輪部に固定され、第2の開口を有する第2の受部とを含み、第2のウエイト部は、第2の受部の第2の開口に脱着自在に接続される第2の突出部と、第2の突出部に接続されたリング状の第2の重量部とを含むものである。
【0012】
このように構成すると、第1の回転部及び第2の回転部の軸体への接続位置を変えると、軸体の駆動を介して胴体に加わる力が変化する。
【0013】
請求項4記載の発明は、請求項3記載の発明の構成において、第1の重量部は、第1の突出部に対して屈曲自在の第1のアームを介して接続され、第2の重量部は、第2の突出部に対して屈曲自在の第2のアームを介して接続されるものである。
【0014】
このように構成すると、第1の重量部及び第2の重量部の屈曲状態を変えれば、第1の回転部及び第2の回転部の軸体への接続位置を変えなくても胴体に加わる力が変化する。
【0015】
請求項5記載の発明は、請求項3又は請求項4記載の発明の構成において、胴体に取付けられ、駆動手段の駆動を制御する上下に移動自在であって、下方位置が第1の重量部及び第2の重量部の移動範囲の高さに含まれるレバーと、レバーに対して水平方向に延びるように脱着自在に接続される保護バーとを更に備え、レバーは、下方位置において駆動手段を駆動し、上方位置において駆動手段を停止するものである。
【0016】
このように構成すると、レバーが下方位置から上方位置に変化すると、移動が停止する。
【0017】
請求項6記載の発明は、請求項3から請求項5のいずれかに記載の発明の構成において、第1の回転部の下方位置において胴体に回動自在に接続されるタイヤ形状の第3の外輪部と、第2の回転部の下方位置において胴体に回動自在に接続されるタイヤ形状の第4の外輪部と、脚体の各々は、胴体に対して脱着自在に構成されると共に、胴体の上下に各々に取付けられ、胴体は模型自動車の車体を構成し、第1の外輪部から第4の外輪部の各々は、第1ウエイト部及び第2ウエイト部を外した状態で車体に取付けられた4輪のタイヤを構成し、脚体の各々は、車体の前後取付けられた前バンパー及び後バンパーを構成するものである。
【0018】
このように構成すると、モーターロボットからモーターカーに変化する。
【0019】
請求項7記載の発明は、モーターロボットであって、上下方向に配置された胴体と、胴体の下部に接続され、前後方向に対してほぼ平行に配置された一対のソリ状の脚体と、前後方向に対して直交するように水平方向を軸中心として胴体の一方側に取付けられ、軸中心に対して回転自在な第1の回転体と、胴体の他方側に取付けられ、軸中心に対して回転自在な第2の回転体とを備え、胴体に取付けられ、第1の回転体及び第2の回転体を回転させるように駆動する駆動手段とを備え、第1の回転体と第2の回転体とは、回転によって軸体に加わる力を変化させることができるように構成されるものである。
【0020】
このように構成すると、第1の回転体と第2の回転体との回転によって胴体に加わる力が変化する。
【発明の効果】
【0021】
以上説明したように、請求項1記載の発明は、第1の回転体と第2の回転体とによって軸体を介して胴体に加わる力が変化するため、モーターロボットは脚体を介して種々の方向に移動する。
【0022】
請求項2記載の発明は、請求項1記載の発明の効果に加えて、第1のウエイト部及び第2のウエイト部によって軸体に加わる力の変化の度合いが定まるため、力の変化の調整が容易となる。
【0023】
請求項3記載の発明は、請求項2記載の発明の効果に加えて、第1の回転部及び第2の回転部の軸体への接続位置を変えると、軸体の駆動を介して胴体に加わる力が変化するため、モーターロボットの移動方向が効率的に変化する。
【0024】
請求項4記載の発明は、請求項3記載の発明の効果に加えて、第1の重量部及び第2の重量部の屈曲状態を変えれば、第1の回転部及び第2の回転部の軸体への接続位置を変えなくても胴体に加わる力が変化するため、モーターロボットの移動方向の変更が容易となる。
【0025】
請求項5記載の発明は、請求項3又は請求項4記載の発明の効果に加えて、レバーが下方位置から上方位置に変化すると、移動が停止するため、2台の同様のモーターロボットで対戦することが可能となる。
【0026】
請求項6記載の発明は、請求項3から請求項5のいずれかに記載の発明の効果に加えて、モーターロボットからモーターカーに変化するため、使用の用途が拡大する。
【0027】
請求項7記載の発明は、第1の回転体と第2の回転体との回転によって胴体に加わる力が変化するため、モーターロボットは脚体を介して種々の方向に移動する。
【発明を実施するための最良の形態】
【0028】
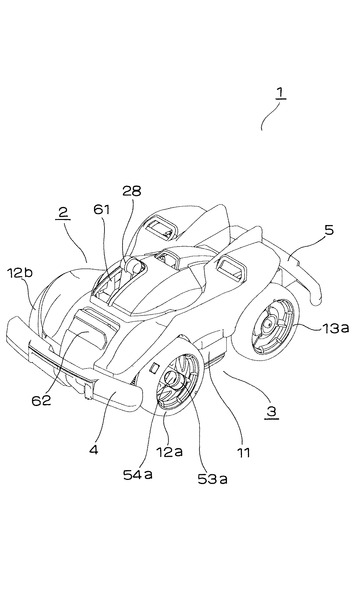
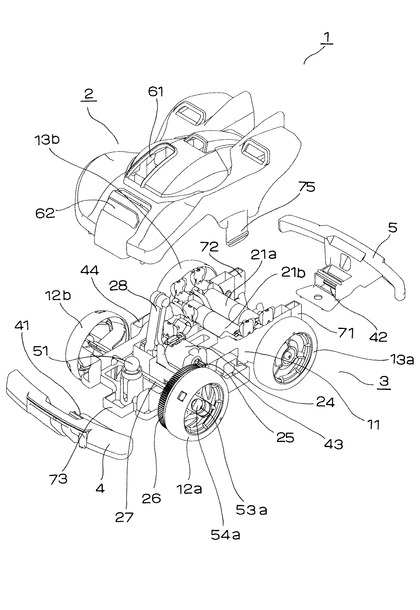
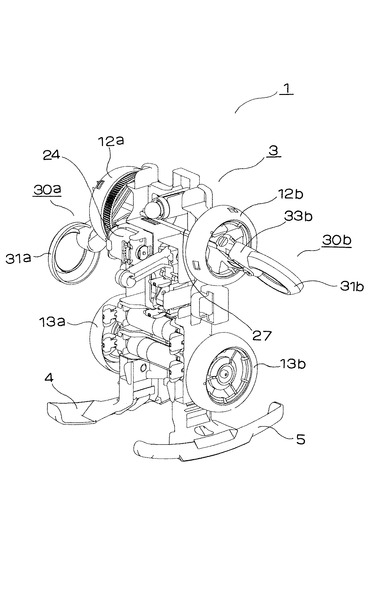
図1はこの発明の第1の実施の形態によるモーターロボットにおける第1の変形状態を示す斜視図であり、図2は図1で示したモーターロボットの分解斜視図である。
【0029】
これらの図を参照して、モーターロボット1は、その第1の変形状態においてはカー形状を有しており、前後左右に広がる形状を有する車体3と、車体3の上部に配置され、脱着自在に取り付け可能な、合成樹脂の射出成形によって形成された前後左右に広がる形状を有する車体カバー2と、車体3の前方に脱着自在に取り付け可能な、合成樹脂の射出成形によって形成された前バンパー4と、車体3の後方に脱着自在に取り付け可能な、合成樹脂の射出成形によって形成された後バンパー5とから主に構成されている。
【0030】
車体3は、合成樹脂の射出成形によって形成された、前後左右に広がる形状を有する車台11内に、駆動装置として、車台11後方に電池21a、21bと、車台11前方に電池21a、21bの電力で作動するモーター24と、モーター24に取り付けられた歯車25と、車台11中央付近に配置され、上方に伸びるように形成され、後方に位置するときにモーター24は作動し、前方に位置するときにモーター24は停止するように下方位置で係合される回動自在のレバー28とを備えている。又、車台11の後方の左右端に回動自在に取り付けられた後輪13a、13bと、車台11の前方の左右方向に水平に回動自在に取り付けられ、モーター24の歯車25と係合する歯車26を有する軸体27と、軸体27の両端に、軸体27に対して回転位置を変えた状態で接続自在に取り付けられ、開口54a、54b(図示せず)を有する受部53a、53b(図示せず)が形成された前輪12a、12bと、軸体27の前方に配置され、モーター24作動時に点灯し、モーター24停止時に消灯する電灯51とを備えている。
【0031】
前バンパー4は受部41が形成され、車台11の前方に形成された突出部73と脱着自在に嵌合する。後バンパー5においても、前バンパー4と同様に受部42が形成され、車台11の後方に形成された突出部74(図示せず)と脱着自在に嵌合する。前バンパー4と後バンパー5とは、車台11に嵌合した状態で、前バンパー4は前方に向かって、後バンパーは後方に向かって凸形状を有するソリ状に形成されている。
【0032】
車体カバー2は、中央の左右端側に、下方に伸びる突出部75、76(図示せず)が形成され、車体3における車台11の左右端側に、前輪12a、12bと後輪13a、13bとの間に各々形成された受部43、44と脱着自在に嵌合する。又、車体カバー2には駆動装置における上方に伸びるレバー28を外方から操作可能な状態で貫通させる開口61が形成され、更に、車体カバー2と車体3とを嵌合状態にしたときに電灯51の点灯・消灯状態が確認できるよう、電灯51の上部位置に透明の電灯カバー62が形成されている。
【0033】
更に、前述した通り、前輪12a、12bには受部53a、53b(図示せず)が形成されており、又、車台11の後方には、左右端側に後方に伸びる突出部71、72が形成されているが、これらの役割については後述する。
【0034】
モーターロボット1は、カー形状を有する第1の変形状態にあっては、上述の駆動装置によって、前輪12a、12bが回転運動する前輪駆動によって前方へ移動する構成となっており、レバー28が前方に位置するときにモーターカー1は停止し、レバー28が後方に位置するときにモーターカー1は作動するよう設定されている。
【0035】
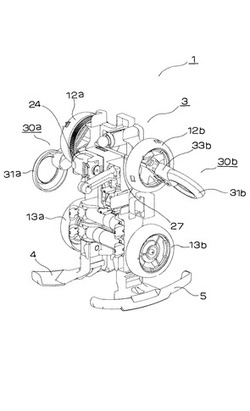
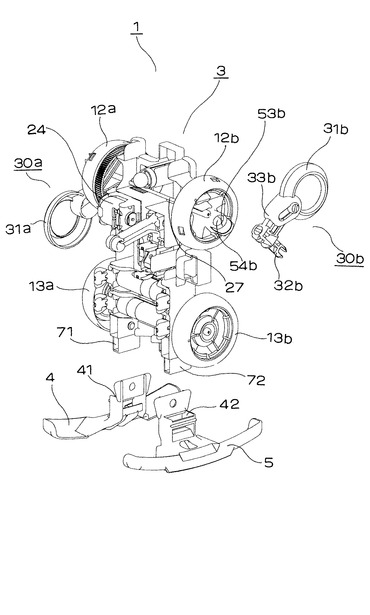
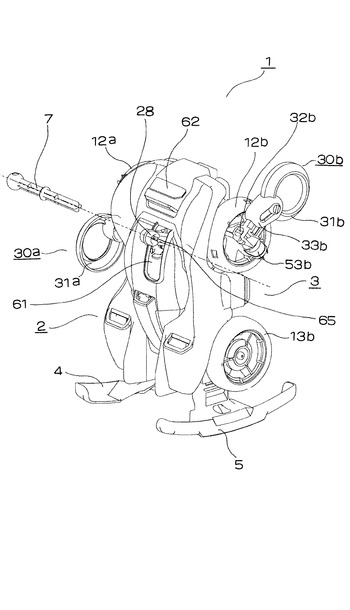
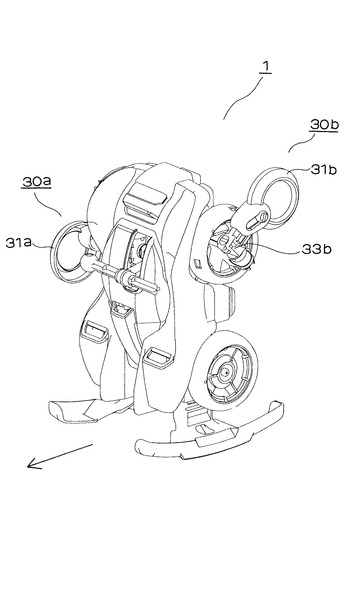
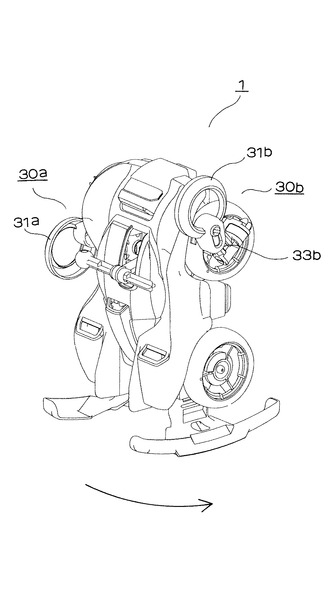
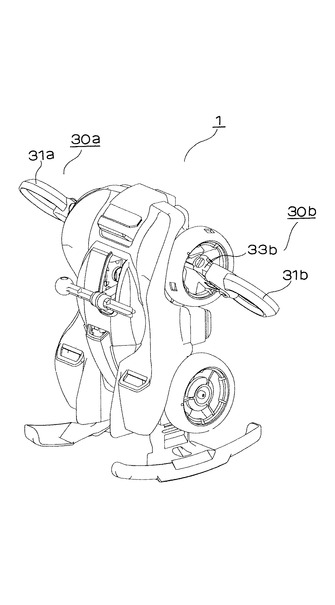
図3は図1で示したモーターロボットの、第1の変形状態から第2の変形状態へ変化する第1の変形態様を示した図であり、図4は図3で示したモーターロボットの第2の変形態様を示した図であり、図5は図3で示したモーターロボットの第3の変形態様を示した図である。
【0036】
図3に示すように、まず、車体3を前輪12a、12bが上方、後輪13a、13bが下方となるように垂直状態にする。このような状態にすると、突出部71、72が下方に位置することになる。突出部71、72は前バンパー4の受部41、後バンパー5の受部42と脱着自在に嵌合できるように形成されており、各々を嵌合することによって、前バンパー4と後バンパー5とは、前述したソリ状に形成された部分が地面と接地し、モーターロボット1を支える、前後方向に対して平行に配置された一対の脚体となる。
【0037】
又、この実施の形態における第2の変形状態においては、前輪12a、12bの各々に接続するウエイト部30a、30bとを備えている。ウエイト部30bは、前輪12bの受部53bの開口54bと脱着自在に嵌合できるように形成された突出部32bと、突出部32bに対して屈曲自在に係合されるアーム33bと、アーム33bの端部に接続されるリング状の重量部31bとを備えている。又、ウエイト部30aにおいても、ウエイト部30bと同一の構成となっており、前輪12aの受部53a(図示せず)の開口54a(図示せず)とウエイト部30aの突出部32a(図示せず)とによって嵌合する。
【0038】
このように、前バンパー4と後バンパー5とウエイト部30a、30bとを各々嵌合すると、図4で示す状態となる。図4で示す状態において、モーターロボット1は、前バンパー4と後バンパー5とを一対の脚体としてバランスを保ち、地面に立つことになる。
【0039】
次に、図5に示すように、車体カバー2を車体3に嵌合する。車体カバー2と車体3との嵌合については前述した通りである。そして、棒状に形成された保護バー7を、車体カバー2の開口61によって外方から操作可能であるレバー28の端部に、保護バー7と脱着自在に嵌合できるように形成された開口65と水平方向に嵌合することにより、モーターロボット1は第2の変形状態となる。
【0040】
モーターロボット1の第2の変形状態においては、電灯カバー62が頭部、車体カバー2と車体3が胴体、前輪12a及びウエイト部30aと前輪12b及びウエイト部30bとが腕部、前バンパー4と後バンパー5とが脚部のように形成されているため、第1の変形状態におけるカー形状とは異なるロボット形状となるため、使用の用途が拡大する。
【0041】
ここで、モーターロボット1の第2の変形状態での動作について説明する。
【0042】
モーターロボット1の第1の変形状態と第2の変形状態とにおいては、モーター等の駆動装置における動作については同一である。即ち、駆動装置によって前輪12a、12bが、第1の変形状態においてモーターロボット1が前方へ移動するように回転動作することに変わりはない。第2の変形状態においては、駆動装置により、軸体27を介して回転する前輪12a、12bには、各々ウエイト部30a、30bが嵌合されている。前輪12a、12bが回転すると、当然ウエイト部30a、30bも回転することになる。すると、ウエイト部30a、30bの重量部31a、31bもアーム33a(図示せず)、33bを介して回転動作することになり、重量部31a、31bの回転方向へ前輪12a、12bが各々引っ張られることになる。即ち、前輪12aとウエイト部30aとが第1の回転体になると共に、前輪12bとウエイト部30bとが第2の回転体となり、軸体27の回転によって、ウエイト部30a、30bに部分的に遠心力が生じる。すると、この遠心力によって前輪12a、12bと接続されている軸体27の軸方向に対して直交する方向に歪みが生じる。
【0043】
歪みが生じた軸体27が回転動作を続けると軸体27の歪みが振動発生源となり、軸体27を支持している車体3が振動することで、前バンパー4と後バンパー5とに振動が伝達され、モーターロボット1は脚体となる前バンパー4と後バンパー5とを介して、種々の方向へ移動することになる。
【0044】
又、前輪12a、12bは軸体27に対して回転位置を変えた状態で脱着自在であるため、前輪12a、12bの回転位置を互いに変更させ、ウエイト部30a、30bによる軸体27への歪みの発生を効率的に変化させることが可能となる。即ち、脚体である前バンパー4と後バンパー5とに加わる振動によるモーターロボット1の移動方向を効率的に変化させることが可能となる。
【0045】
次に、ウエイト部30a、30bにおけるアーム33a(図示せず)、33bの効果について説明する。
【0046】
ウエイト部30bは、前述の通り、前輪12bに形成される受部53bの開口54b(図示せず)と脱着自在に嵌合できる突出部32bと、突出部32bに対して屈曲自在に形成されるアーム33bと、アーム33bの端部に接続されるリング状の重量部材31bとを備えている。又、ウエイト部30aについても同じ構成となっている。
【0047】
アーム33bは突出部32bに対して屈曲自在に形成されており、そのため、重量部31bにおいても、突出部32bに対して屈曲自在に移動することが可能となる。同様に、ウエイト部30aの重量部31aにおいても、アーム32a(図示せず)に対して屈曲自在に移動することが可能である。重量部31a、31bをアーム33a(図示せず)、33bに対して屈曲自在に移動させることによって、前輪12a、12bを軸体27に対して接続位置を変えることなく、軸体27に重量部31a、31bの回転による軸方向への歪みを変化させることができるため、モーターロボット1の移動方向の変更が更に容易におこなえる。
【0048】
更に、この実施の形態によるモーターロボット1の第2の変形状態においては、ウエイト部材30a、30bとレバー28と保護バー7とに特徴がある。即ち、レバー28における下方位置は、ウエイト部材30a、30bにおける重量部31a、31bの移動範囲の高さに含まれるように設定されている。このため、モーターロボット1を2台用意して、これらを対戦させて遊ぶことが可能となる。即ち、モーターロボット1が動作している状態、即ち、レバー28が下方に位置している状態において、一方のモーターロボット1の保護バー7が、他方のモーターロボット1の重量部31a、31bの回転範囲内に接近したとき、一方のモーターロボット1における保護バー7は、他方のモーターロボット1における重量部31a、31bによって跳ね上げられ、上方に位置が変更されることになる。保護バー7が上方に位置すると、嵌合しているレバー28も上方に位置することになるため、一方のモーターロボット1は停止する。このように、モーターロボット1同士で、各々が各々のモーターロボット1を停止させるよう、対戦することが可能となる。
【0049】
尚、上記の実施の形態では、第1の変形状態においてカー形状を有しているが、第2の変形状態におけるロボット形状単独の構造でも良い。その場合、前輪13a、13bは特定形状を有しているが他の形状であっても良く、後輪13a、13bはなくても良く、前バンパー4と後バンパー5とはソリ状の一対の脚体として形成されていれば他の形状でも良く、前バンパー4と後バンパー5とは脱着自在でなくても良く、車体カバー2と車体3とは、第2の変形状態において、モーターロボットの胴体として形成されていれば良く、車体カバー2と車体3とは脱着自在でなくても良い。
【0050】
又、上記の実施の形態では、保護バー7が備えられているが、保護バー7はなくても良い。
【0051】
更に、上記の実施の形態では、レバー28は特定形状を有しているが、駆動装置を作動し、停止できるものであれば良い。
【0052】
更に、上記の実施の形態では、アーム33a、33bが備えられているが、アーム33a、33bは無くても良く、突出部32a、32bに直接重量部31a、31bを接続しても良い。
【0053】
更に、上記の実施の形態では、ウエイト部30a、30bが特定形状を有しているが、回転によって軸体27に加わる力を変化させるものであれば、他の形状であっても良い。
【0054】
更に、上記の実施の形態では、駆動装置は特定構成を有しているが、軸体27を回転させるものであれば良い。
【0055】
更に、上記の実施の形態では、軸体27の端部に接続する第1の回転体として、前輪12aとウエイト部30aとにより構成されており、第2の回転体として、前輪12bとウエイト部30bとにより構成されているが、軸体27の回転によって軸体27に加わる力を変化させるように接続されているものであれば良い。
【0056】
更に、上記の実施の形態では、第1の回転体と第2の回転体とは、1本の軸体27の両端に接続され、駆動装置によって軸体27が回転しているが、第1の回転体と第2の回転体とは、軸体27における軸中心に対して各々回転自在に配置され、駆動装置は第1の回転体と第2の回転体とを独立に回転させるものであれば良い。
【実施例】
【0057】
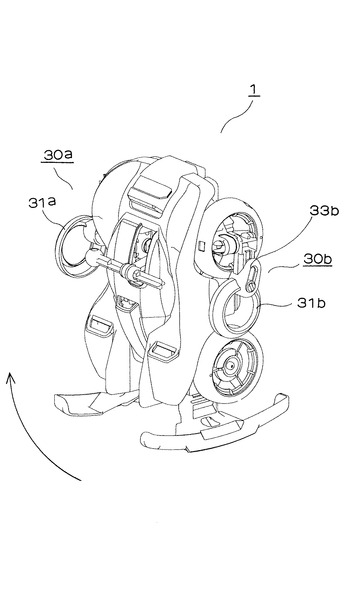
図6は図5で示したモーターロボットが前進するときのウエイト部の重量部位置を示した図である。
【0058】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)に直交するように屈曲し、かつ、重量部31aの回転位置と重量部31bの回転位置とを、一方の重量部の位置から180°回転した位置に他方の重量部の位置を設定する。この状態でモーターロボット1を作動させると、モーターロボット1は矢印の方向に前進移動をおこなうことになる。
【0059】
尚、重量部31a、31bを逆回転させた場合は、図6における重量部位置においては後退移動をおこなうことになる。
【0060】
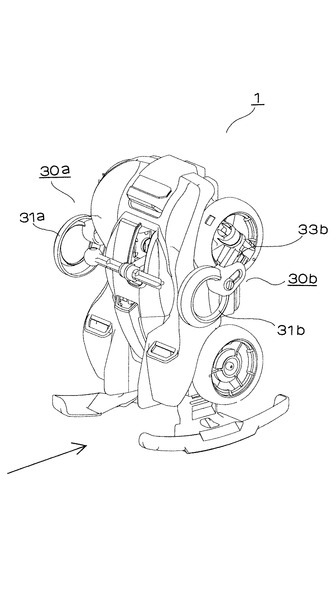
図7は図5で示したモーターロボットが左旋回するときのウエイト部の重量部位置を示した第1の図である。
【0061】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)に直交するように屈曲し、かつ、重量部31aの回転位置から、重量部31a、31bの回転方向へ90°先行した位置に重量部31bの位置を設定する。この状態でモーターロボット1を作動させると、モーターロボット1は矢印の方向に左旋回移動をおこなうことになる。
【0062】
尚、重量部31a、31bを逆回転させた場合も、図7における重量部位置においては左旋回移動をおこなうことになる。
【0063】
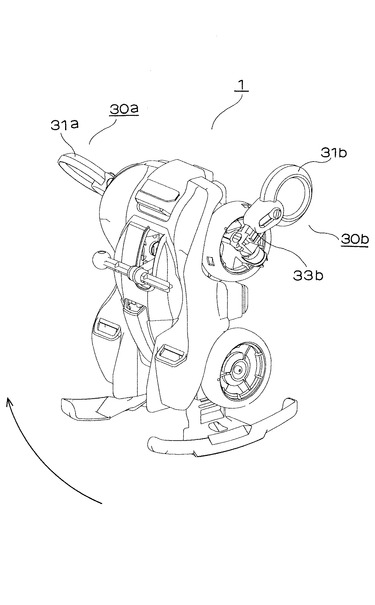
図8は図5で示したモーターロボットが右旋回するときのウエイト部の重量部位置を示した第1の図である。
【0064】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)に直交するように屈曲し、かつ、重量部31aの回転位置から、重量部31a、31bの回転方向へ270°(−90°)先行した位置に重量部31bの位置を設定する。この状態でモーターロボット1を作動させると、モーターロボット1は矢印の方向に右旋回移動をおこなうことになる。
【0065】
尚、重量部31a、31bを逆回転させた場合も、図8における重量部位置においては右旋回移動をおこなうことになる。
【0066】
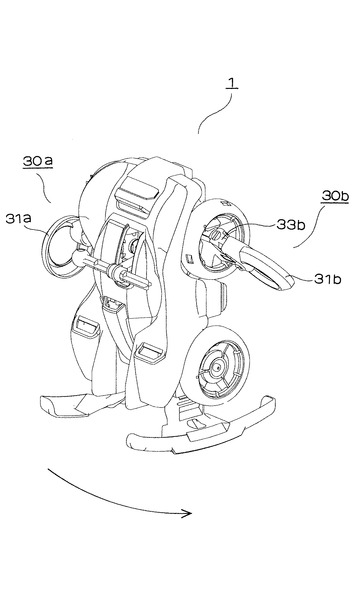
図9は図5で示したモーターロボットが後退するときのウエイト部の重量部位置を示した図である。
【0067】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)に直交するように屈曲し、かつ、重量部31aの回転位置と同じ位置に重量部31bの回転位置を設定する。この状態でモーターロボット1を作動させると、モーターロボット1は矢印の方向に後退移動をおこなうことになる。
【0068】
尚、重量部31a、31bを逆回転させた場合は、図9における重量部位置においては前進移動をおこなうことになる。
【0069】
図10は図5で示したモーターロボットが右旋回するときのウエイト部の重量部位置を示した第2の図である。
【0070】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)を軸体27(図示せず)と平行となるように屈曲し、アーム33bを軸体27(図示せず)に直交するように屈曲させる。この状態でモーターロボット1を作動させると、モーターロボット1は図8で示したものと同様に、矢印の方向に右旋回移動をおこなうことになる。
【0071】
尚、重量部31a、31bを逆回転させた場合は、図10における重量部位置においては左旋回移動をおこなうことになる。
【0072】
図11は図5で示したモーターロボットが左旋回するときのウエイト部の重量部位置を示した第2の図である。
【0073】
図に示すように、モーターロボット1の第2の変形状態において、アーム33bを軸体27(図示せず)と平行となるように屈曲し、アーム33a(図示せず)を軸体27(図示せず)に直交するように屈曲させる。この状態でモーターロボット1を作動させると、モーターロボット1は図7で示したものと同様に、矢印の方向に左旋回移動をおこなうことになる。
【0074】
尚、重量部31a、31bを逆回転させた場合は、図11における重量部位置においては右旋回移動をおこなうことになる。
【0075】
図12は図5で示したモーターロボットが停止するときのウエイト部の重量部位置を示した図である。
【0076】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)と平行となるように屈曲させる。この状態でモーターロボット1を作動させると、モーターロボット1は移動せず、その位置で停止したままとなる。
【0077】
尚、重量部31a、31bを逆回転させた場合も、図12における重量部位置においては停止したままとなる。
【0078】
尚、上記の実施の形態では、図6に示したモーターロボット1の重量部位置においては、モーターロボット1は前進移動をおこなうことになるが、重量部31aを逆回転させ、重量部31bに通常の回転をさせた場合は、図6で示した重量部位置においては右旋回移動をおこなうことになり、かつ、図8や図10で示した重量部位置におけるモーターロボット1の右旋回移動より速く右旋回移動がおこなえることになる。又、重量部31aに通常の回転をさせ、重量部31bを逆回転させた場合は、図6で示した重量部位置においては左旋回移動をおこなうことになり、かつ、図7や図11で示した重量部位置におけるモーターロボット1の左旋回移動より速く左旋回移動をおこなえることになる。
【0079】
又、上記の実施の形態では、図6〜図12の実施例で示したモーターロボット1の重量部位置において、前進や後退等の移動をおこなっているが、上記の実施例以外での重量部位置における移動動作は、それぞれにおいて変わるものである。
【0080】
更に、上記の実施例にあっては、重量部の位置や回転方向に応じてモーターロボット1の移動方向等が定まっているが、モーターロボット1の重心位置、脚体形状、軸体の胴部に対する配置位置、重量部の大きさ等の種々の要因によって実際の移動方向が定まるものと考えられる。従って、これらの要因を自在に変更できるようにモーターロボットを構成しておけば、より興味の深いロボットとなる。
【図面の簡単な説明】
【0081】
【図1】この発明の第1の実施の形態によるモーターロボットにおける第1の変形状態を示す斜視図である。
【図2】図1で示したモーターロボットの分解斜視図である。
【図3】図1で示したモーターロボットの、第1の変形状態から第2の変形状態へ変化する第1の変形態様を示した図である。
【図4】図3で示したモーターロボットの第2の変形態様を示した図である。
【図5】図3で示したモーターロボットの第3の変形態様を示した図である。
【図6】図5で示したモーターロボットが前進するときのウエイト部の重量部位置を示した図である。
【図7】図5で示したモーターロボットが左旋回するときのウエイト部の重量部位置を示した第1の図である。
【図8】図5で示したモーターロボットが右旋回するときのウエイト部の重量部位置を示した第1の図である。
【図9】図5で示したモーターロボットが後退するときのウエイト部の重量部位置を示した図である。
【図10】図5で示したモーターロボットが右旋回するときのウエイト部の重量部位置を示した第2の図である。
【図11】図5で示したモーターロボットが左旋回するときのウエイト部の重量部位置を示した第2の図である。
【図12】図5で示したモーターロボットが停止するときのウエイト部の重量部位置を示した図である。
【符号の説明】
【0082】
1 モーターロボット
2 車体カバー
3 車体
4 前バンパー
5 後バンパー
7 保護バー
12 前輪
13 後輪
27 軸体
28 レバー
30 ウエイト部
31 重量部
32 突出部
33 アーム
64 受部
65 開口
尚、各図中同一符号は同一又は相当部分を示す。
【技術分野】
【0001】
この発明はモーターロボットに関し、特に小学生等が使用する教材等に用いられるモーターロボットに関するものである。
【背景技術】
【0002】
従来のモーターロボットは、上下方向に伸びる胴体と、胴体内に配置される駆動装置と、胴体の下部に各々が平行となるように配置され、駆動装置と係合する一対の脚部と、胴体の上部に各々が平行となるように配置された一対の腕部と、胴体の上部に配置される頭部とを主に備えるものである。
【0003】
駆動装置と係合する一対の脚部は、駆動装置によって、例えば、脚部の各々が交互に前後運動することによって、モーターロボットを前進又は後退させる。更に、一対の腕部と駆動装置とを係合させると、脚部と腕部との両方が作動する。従って、より人間に近い歩行動作を有するものとなる。
【0004】
更に、駆動装置と一対の脚部との係合関係を変更することで、モーターロボットは様々な歩行動作をすることが可能となる。
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記のような従来のモーターロボットでは、モーターロボットが移動するためには、駆動装置と脚部とを直接係合させなければ、モーターロボットは移動することができないものとなっていた。即ち、駆動装置により脚部が直接作動することで、モーターロボットの移動がおこなわれていた。従って、モーターロボットの動きが予想の範囲となるため、動作の意外性という観点では面白みに欠けていた。
【0006】
この発明は、上記のような課題を解決するためになされたもので、動作の意外性を有するモーターロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、請求項1記載の発明は、モーターロボットであって、上下方向に配置された胴体と、胴体の下部に接続され、前後方向に対してほぼ平行に配置された一対のソリ状の脚体と、胴体に取付けられ、前後方向に対して直交するように水平方向に延びる軸体と、胴体に取付けられ、軸体を回転させるように駆動する駆動手段と、軸体の一方端部に接続され、軸体の回転に伴って回転する第1の回転体と、軸体の他方端部に接続され、軸体の回転に伴って回転する第2の回転体とを備え、第1の回転体と第2の回転体とは、軸体の回転によって軸体に加わる力を変化させることができるように構成されるものである。
【0008】
このように構成すると、第1の回転体と第2の回転体とによって軸体を介して胴体に加わる力が変化する。
【0009】
請求項2記載の発明は、請求項1記載の発明の構成において、第1の回転体は、軸体に接続される第1の回転部と、第1の回転部に固定され、回転によって第1の回転部を介して軸体に加わる力を変化させる第1のウエイト部を含み、第2の回転体は、軸体に接続される第2の回転部と、第2の回転部に固定され、回転によって第2の回転部を介して軸体に加わる力を変化させる第2のウエイト部を含むものである。
【0010】
このように構成すると、第1のウエイト部及び第2のウエイト部によって軸体に加わる力の変化の度合いが定まる。
【0011】
請求項3記載の発明は、請求項2記載の発明の構成において、第1の回転部は、軸体に対して回転位置を変えた状態で接続自在であり、タイヤ形状の第1の外輪部と、第1の外輪部に固定され、第1の開口を有する第1の受部とを含み、第1のウエイト部は、第1の受部の第1の開口に脱着自在に接続される第1の突出部と、第1の突出部に接続されたリング状の第1の重量部とを含み、第2の回転部は、軸体に対して回転位置を変えた状態で接続自在であり、タイヤ形状の第2の外輪部と、第2の外輪部に固定され、第2の開口を有する第2の受部とを含み、第2のウエイト部は、第2の受部の第2の開口に脱着自在に接続される第2の突出部と、第2の突出部に接続されたリング状の第2の重量部とを含むものである。
【0012】
このように構成すると、第1の回転部及び第2の回転部の軸体への接続位置を変えると、軸体の駆動を介して胴体に加わる力が変化する。
【0013】
請求項4記載の発明は、請求項3記載の発明の構成において、第1の重量部は、第1の突出部に対して屈曲自在の第1のアームを介して接続され、第2の重量部は、第2の突出部に対して屈曲自在の第2のアームを介して接続されるものである。
【0014】
このように構成すると、第1の重量部及び第2の重量部の屈曲状態を変えれば、第1の回転部及び第2の回転部の軸体への接続位置を変えなくても胴体に加わる力が変化する。
【0015】
請求項5記載の発明は、請求項3又は請求項4記載の発明の構成において、胴体に取付けられ、駆動手段の駆動を制御する上下に移動自在であって、下方位置が第1の重量部及び第2の重量部の移動範囲の高さに含まれるレバーと、レバーに対して水平方向に延びるように脱着自在に接続される保護バーとを更に備え、レバーは、下方位置において駆動手段を駆動し、上方位置において駆動手段を停止するものである。
【0016】
このように構成すると、レバーが下方位置から上方位置に変化すると、移動が停止する。
【0017】
請求項6記載の発明は、請求項3から請求項5のいずれかに記載の発明の構成において、第1の回転部の下方位置において胴体に回動自在に接続されるタイヤ形状の第3の外輪部と、第2の回転部の下方位置において胴体に回動自在に接続されるタイヤ形状の第4の外輪部と、脚体の各々は、胴体に対して脱着自在に構成されると共に、胴体の上下に各々に取付けられ、胴体は模型自動車の車体を構成し、第1の外輪部から第4の外輪部の各々は、第1ウエイト部及び第2ウエイト部を外した状態で車体に取付けられた4輪のタイヤを構成し、脚体の各々は、車体の前後取付けられた前バンパー及び後バンパーを構成するものである。
【0018】
このように構成すると、モーターロボットからモーターカーに変化する。
【0019】
請求項7記載の発明は、モーターロボットであって、上下方向に配置された胴体と、胴体の下部に接続され、前後方向に対してほぼ平行に配置された一対のソリ状の脚体と、前後方向に対して直交するように水平方向を軸中心として胴体の一方側に取付けられ、軸中心に対して回転自在な第1の回転体と、胴体の他方側に取付けられ、軸中心に対して回転自在な第2の回転体とを備え、胴体に取付けられ、第1の回転体及び第2の回転体を回転させるように駆動する駆動手段とを備え、第1の回転体と第2の回転体とは、回転によって軸体に加わる力を変化させることができるように構成されるものである。
【0020】
このように構成すると、第1の回転体と第2の回転体との回転によって胴体に加わる力が変化する。
【発明の効果】
【0021】
以上説明したように、請求項1記載の発明は、第1の回転体と第2の回転体とによって軸体を介して胴体に加わる力が変化するため、モーターロボットは脚体を介して種々の方向に移動する。
【0022】
請求項2記載の発明は、請求項1記載の発明の効果に加えて、第1のウエイト部及び第2のウエイト部によって軸体に加わる力の変化の度合いが定まるため、力の変化の調整が容易となる。
【0023】
請求項3記載の発明は、請求項2記載の発明の効果に加えて、第1の回転部及び第2の回転部の軸体への接続位置を変えると、軸体の駆動を介して胴体に加わる力が変化するため、モーターロボットの移動方向が効率的に変化する。
【0024】
請求項4記載の発明は、請求項3記載の発明の効果に加えて、第1の重量部及び第2の重量部の屈曲状態を変えれば、第1の回転部及び第2の回転部の軸体への接続位置を変えなくても胴体に加わる力が変化するため、モーターロボットの移動方向の変更が容易となる。
【0025】
請求項5記載の発明は、請求項3又は請求項4記載の発明の効果に加えて、レバーが下方位置から上方位置に変化すると、移動が停止するため、2台の同様のモーターロボットで対戦することが可能となる。
【0026】
請求項6記載の発明は、請求項3から請求項5のいずれかに記載の発明の効果に加えて、モーターロボットからモーターカーに変化するため、使用の用途が拡大する。
【0027】
請求項7記載の発明は、第1の回転体と第2の回転体との回転によって胴体に加わる力が変化するため、モーターロボットは脚体を介して種々の方向に移動する。
【発明を実施するための最良の形態】
【0028】
図1はこの発明の第1の実施の形態によるモーターロボットにおける第1の変形状態を示す斜視図であり、図2は図1で示したモーターロボットの分解斜視図である。
【0029】
これらの図を参照して、モーターロボット1は、その第1の変形状態においてはカー形状を有しており、前後左右に広がる形状を有する車体3と、車体3の上部に配置され、脱着自在に取り付け可能な、合成樹脂の射出成形によって形成された前後左右に広がる形状を有する車体カバー2と、車体3の前方に脱着自在に取り付け可能な、合成樹脂の射出成形によって形成された前バンパー4と、車体3の後方に脱着自在に取り付け可能な、合成樹脂の射出成形によって形成された後バンパー5とから主に構成されている。
【0030】
車体3は、合成樹脂の射出成形によって形成された、前後左右に広がる形状を有する車台11内に、駆動装置として、車台11後方に電池21a、21bと、車台11前方に電池21a、21bの電力で作動するモーター24と、モーター24に取り付けられた歯車25と、車台11中央付近に配置され、上方に伸びるように形成され、後方に位置するときにモーター24は作動し、前方に位置するときにモーター24は停止するように下方位置で係合される回動自在のレバー28とを備えている。又、車台11の後方の左右端に回動自在に取り付けられた後輪13a、13bと、車台11の前方の左右方向に水平に回動自在に取り付けられ、モーター24の歯車25と係合する歯車26を有する軸体27と、軸体27の両端に、軸体27に対して回転位置を変えた状態で接続自在に取り付けられ、開口54a、54b(図示せず)を有する受部53a、53b(図示せず)が形成された前輪12a、12bと、軸体27の前方に配置され、モーター24作動時に点灯し、モーター24停止時に消灯する電灯51とを備えている。
【0031】
前バンパー4は受部41が形成され、車台11の前方に形成された突出部73と脱着自在に嵌合する。後バンパー5においても、前バンパー4と同様に受部42が形成され、車台11の後方に形成された突出部74(図示せず)と脱着自在に嵌合する。前バンパー4と後バンパー5とは、車台11に嵌合した状態で、前バンパー4は前方に向かって、後バンパーは後方に向かって凸形状を有するソリ状に形成されている。
【0032】
車体カバー2は、中央の左右端側に、下方に伸びる突出部75、76(図示せず)が形成され、車体3における車台11の左右端側に、前輪12a、12bと後輪13a、13bとの間に各々形成された受部43、44と脱着自在に嵌合する。又、車体カバー2には駆動装置における上方に伸びるレバー28を外方から操作可能な状態で貫通させる開口61が形成され、更に、車体カバー2と車体3とを嵌合状態にしたときに電灯51の点灯・消灯状態が確認できるよう、電灯51の上部位置に透明の電灯カバー62が形成されている。
【0033】
更に、前述した通り、前輪12a、12bには受部53a、53b(図示せず)が形成されており、又、車台11の後方には、左右端側に後方に伸びる突出部71、72が形成されているが、これらの役割については後述する。
【0034】
モーターロボット1は、カー形状を有する第1の変形状態にあっては、上述の駆動装置によって、前輪12a、12bが回転運動する前輪駆動によって前方へ移動する構成となっており、レバー28が前方に位置するときにモーターカー1は停止し、レバー28が後方に位置するときにモーターカー1は作動するよう設定されている。
【0035】
図3は図1で示したモーターロボットの、第1の変形状態から第2の変形状態へ変化する第1の変形態様を示した図であり、図4は図3で示したモーターロボットの第2の変形態様を示した図であり、図5は図3で示したモーターロボットの第3の変形態様を示した図である。
【0036】
図3に示すように、まず、車体3を前輪12a、12bが上方、後輪13a、13bが下方となるように垂直状態にする。このような状態にすると、突出部71、72が下方に位置することになる。突出部71、72は前バンパー4の受部41、後バンパー5の受部42と脱着自在に嵌合できるように形成されており、各々を嵌合することによって、前バンパー4と後バンパー5とは、前述したソリ状に形成された部分が地面と接地し、モーターロボット1を支える、前後方向に対して平行に配置された一対の脚体となる。
【0037】
又、この実施の形態における第2の変形状態においては、前輪12a、12bの各々に接続するウエイト部30a、30bとを備えている。ウエイト部30bは、前輪12bの受部53bの開口54bと脱着自在に嵌合できるように形成された突出部32bと、突出部32bに対して屈曲自在に係合されるアーム33bと、アーム33bの端部に接続されるリング状の重量部31bとを備えている。又、ウエイト部30aにおいても、ウエイト部30bと同一の構成となっており、前輪12aの受部53a(図示せず)の開口54a(図示せず)とウエイト部30aの突出部32a(図示せず)とによって嵌合する。
【0038】
このように、前バンパー4と後バンパー5とウエイト部30a、30bとを各々嵌合すると、図4で示す状態となる。図4で示す状態において、モーターロボット1は、前バンパー4と後バンパー5とを一対の脚体としてバランスを保ち、地面に立つことになる。
【0039】
次に、図5に示すように、車体カバー2を車体3に嵌合する。車体カバー2と車体3との嵌合については前述した通りである。そして、棒状に形成された保護バー7を、車体カバー2の開口61によって外方から操作可能であるレバー28の端部に、保護バー7と脱着自在に嵌合できるように形成された開口65と水平方向に嵌合することにより、モーターロボット1は第2の変形状態となる。
【0040】
モーターロボット1の第2の変形状態においては、電灯カバー62が頭部、車体カバー2と車体3が胴体、前輪12a及びウエイト部30aと前輪12b及びウエイト部30bとが腕部、前バンパー4と後バンパー5とが脚部のように形成されているため、第1の変形状態におけるカー形状とは異なるロボット形状となるため、使用の用途が拡大する。
【0041】
ここで、モーターロボット1の第2の変形状態での動作について説明する。
【0042】
モーターロボット1の第1の変形状態と第2の変形状態とにおいては、モーター等の駆動装置における動作については同一である。即ち、駆動装置によって前輪12a、12bが、第1の変形状態においてモーターロボット1が前方へ移動するように回転動作することに変わりはない。第2の変形状態においては、駆動装置により、軸体27を介して回転する前輪12a、12bには、各々ウエイト部30a、30bが嵌合されている。前輪12a、12bが回転すると、当然ウエイト部30a、30bも回転することになる。すると、ウエイト部30a、30bの重量部31a、31bもアーム33a(図示せず)、33bを介して回転動作することになり、重量部31a、31bの回転方向へ前輪12a、12bが各々引っ張られることになる。即ち、前輪12aとウエイト部30aとが第1の回転体になると共に、前輪12bとウエイト部30bとが第2の回転体となり、軸体27の回転によって、ウエイト部30a、30bに部分的に遠心力が生じる。すると、この遠心力によって前輪12a、12bと接続されている軸体27の軸方向に対して直交する方向に歪みが生じる。
【0043】
歪みが生じた軸体27が回転動作を続けると軸体27の歪みが振動発生源となり、軸体27を支持している車体3が振動することで、前バンパー4と後バンパー5とに振動が伝達され、モーターロボット1は脚体となる前バンパー4と後バンパー5とを介して、種々の方向へ移動することになる。
【0044】
又、前輪12a、12bは軸体27に対して回転位置を変えた状態で脱着自在であるため、前輪12a、12bの回転位置を互いに変更させ、ウエイト部30a、30bによる軸体27への歪みの発生を効率的に変化させることが可能となる。即ち、脚体である前バンパー4と後バンパー5とに加わる振動によるモーターロボット1の移動方向を効率的に変化させることが可能となる。
【0045】
次に、ウエイト部30a、30bにおけるアーム33a(図示せず)、33bの効果について説明する。
【0046】
ウエイト部30bは、前述の通り、前輪12bに形成される受部53bの開口54b(図示せず)と脱着自在に嵌合できる突出部32bと、突出部32bに対して屈曲自在に形成されるアーム33bと、アーム33bの端部に接続されるリング状の重量部材31bとを備えている。又、ウエイト部30aについても同じ構成となっている。
【0047】
アーム33bは突出部32bに対して屈曲自在に形成されており、そのため、重量部31bにおいても、突出部32bに対して屈曲自在に移動することが可能となる。同様に、ウエイト部30aの重量部31aにおいても、アーム32a(図示せず)に対して屈曲自在に移動することが可能である。重量部31a、31bをアーム33a(図示せず)、33bに対して屈曲自在に移動させることによって、前輪12a、12bを軸体27に対して接続位置を変えることなく、軸体27に重量部31a、31bの回転による軸方向への歪みを変化させることができるため、モーターロボット1の移動方向の変更が更に容易におこなえる。
【0048】
更に、この実施の形態によるモーターロボット1の第2の変形状態においては、ウエイト部材30a、30bとレバー28と保護バー7とに特徴がある。即ち、レバー28における下方位置は、ウエイト部材30a、30bにおける重量部31a、31bの移動範囲の高さに含まれるように設定されている。このため、モーターロボット1を2台用意して、これらを対戦させて遊ぶことが可能となる。即ち、モーターロボット1が動作している状態、即ち、レバー28が下方に位置している状態において、一方のモーターロボット1の保護バー7が、他方のモーターロボット1の重量部31a、31bの回転範囲内に接近したとき、一方のモーターロボット1における保護バー7は、他方のモーターロボット1における重量部31a、31bによって跳ね上げられ、上方に位置が変更されることになる。保護バー7が上方に位置すると、嵌合しているレバー28も上方に位置することになるため、一方のモーターロボット1は停止する。このように、モーターロボット1同士で、各々が各々のモーターロボット1を停止させるよう、対戦することが可能となる。
【0049】
尚、上記の実施の形態では、第1の変形状態においてカー形状を有しているが、第2の変形状態におけるロボット形状単独の構造でも良い。その場合、前輪13a、13bは特定形状を有しているが他の形状であっても良く、後輪13a、13bはなくても良く、前バンパー4と後バンパー5とはソリ状の一対の脚体として形成されていれば他の形状でも良く、前バンパー4と後バンパー5とは脱着自在でなくても良く、車体カバー2と車体3とは、第2の変形状態において、モーターロボットの胴体として形成されていれば良く、車体カバー2と車体3とは脱着自在でなくても良い。
【0050】
又、上記の実施の形態では、保護バー7が備えられているが、保護バー7はなくても良い。
【0051】
更に、上記の実施の形態では、レバー28は特定形状を有しているが、駆動装置を作動し、停止できるものであれば良い。
【0052】
更に、上記の実施の形態では、アーム33a、33bが備えられているが、アーム33a、33bは無くても良く、突出部32a、32bに直接重量部31a、31bを接続しても良い。
【0053】
更に、上記の実施の形態では、ウエイト部30a、30bが特定形状を有しているが、回転によって軸体27に加わる力を変化させるものであれば、他の形状であっても良い。
【0054】
更に、上記の実施の形態では、駆動装置は特定構成を有しているが、軸体27を回転させるものであれば良い。
【0055】
更に、上記の実施の形態では、軸体27の端部に接続する第1の回転体として、前輪12aとウエイト部30aとにより構成されており、第2の回転体として、前輪12bとウエイト部30bとにより構成されているが、軸体27の回転によって軸体27に加わる力を変化させるように接続されているものであれば良い。
【0056】
更に、上記の実施の形態では、第1の回転体と第2の回転体とは、1本の軸体27の両端に接続され、駆動装置によって軸体27が回転しているが、第1の回転体と第2の回転体とは、軸体27における軸中心に対して各々回転自在に配置され、駆動装置は第1の回転体と第2の回転体とを独立に回転させるものであれば良い。
【実施例】
【0057】
図6は図5で示したモーターロボットが前進するときのウエイト部の重量部位置を示した図である。
【0058】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)に直交するように屈曲し、かつ、重量部31aの回転位置と重量部31bの回転位置とを、一方の重量部の位置から180°回転した位置に他方の重量部の位置を設定する。この状態でモーターロボット1を作動させると、モーターロボット1は矢印の方向に前進移動をおこなうことになる。
【0059】
尚、重量部31a、31bを逆回転させた場合は、図6における重量部位置においては後退移動をおこなうことになる。
【0060】
図7は図5で示したモーターロボットが左旋回するときのウエイト部の重量部位置を示した第1の図である。
【0061】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)に直交するように屈曲し、かつ、重量部31aの回転位置から、重量部31a、31bの回転方向へ90°先行した位置に重量部31bの位置を設定する。この状態でモーターロボット1を作動させると、モーターロボット1は矢印の方向に左旋回移動をおこなうことになる。
【0062】
尚、重量部31a、31bを逆回転させた場合も、図7における重量部位置においては左旋回移動をおこなうことになる。
【0063】
図8は図5で示したモーターロボットが右旋回するときのウエイト部の重量部位置を示した第1の図である。
【0064】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)に直交するように屈曲し、かつ、重量部31aの回転位置から、重量部31a、31bの回転方向へ270°(−90°)先行した位置に重量部31bの位置を設定する。この状態でモーターロボット1を作動させると、モーターロボット1は矢印の方向に右旋回移動をおこなうことになる。
【0065】
尚、重量部31a、31bを逆回転させた場合も、図8における重量部位置においては右旋回移動をおこなうことになる。
【0066】
図9は図5で示したモーターロボットが後退するときのウエイト部の重量部位置を示した図である。
【0067】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)に直交するように屈曲し、かつ、重量部31aの回転位置と同じ位置に重量部31bの回転位置を設定する。この状態でモーターロボット1を作動させると、モーターロボット1は矢印の方向に後退移動をおこなうことになる。
【0068】
尚、重量部31a、31bを逆回転させた場合は、図9における重量部位置においては前進移動をおこなうことになる。
【0069】
図10は図5で示したモーターロボットが右旋回するときのウエイト部の重量部位置を示した第2の図である。
【0070】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)を軸体27(図示せず)と平行となるように屈曲し、アーム33bを軸体27(図示せず)に直交するように屈曲させる。この状態でモーターロボット1を作動させると、モーターロボット1は図8で示したものと同様に、矢印の方向に右旋回移動をおこなうことになる。
【0071】
尚、重量部31a、31bを逆回転させた場合は、図10における重量部位置においては左旋回移動をおこなうことになる。
【0072】
図11は図5で示したモーターロボットが左旋回するときのウエイト部の重量部位置を示した第2の図である。
【0073】
図に示すように、モーターロボット1の第2の変形状態において、アーム33bを軸体27(図示せず)と平行となるように屈曲し、アーム33a(図示せず)を軸体27(図示せず)に直交するように屈曲させる。この状態でモーターロボット1を作動させると、モーターロボット1は図7で示したものと同様に、矢印の方向に左旋回移動をおこなうことになる。
【0074】
尚、重量部31a、31bを逆回転させた場合は、図11における重量部位置においては右旋回移動をおこなうことになる。
【0075】
図12は図5で示したモーターロボットが停止するときのウエイト部の重量部位置を示した図である。
【0076】
図に示すように、モーターロボット1の第2の変形状態において、アーム33a(図示せず)、33bを軸体27(図示せず)と平行となるように屈曲させる。この状態でモーターロボット1を作動させると、モーターロボット1は移動せず、その位置で停止したままとなる。
【0077】
尚、重量部31a、31bを逆回転させた場合も、図12における重量部位置においては停止したままとなる。
【0078】
尚、上記の実施の形態では、図6に示したモーターロボット1の重量部位置においては、モーターロボット1は前進移動をおこなうことになるが、重量部31aを逆回転させ、重量部31bに通常の回転をさせた場合は、図6で示した重量部位置においては右旋回移動をおこなうことになり、かつ、図8や図10で示した重量部位置におけるモーターロボット1の右旋回移動より速く右旋回移動がおこなえることになる。又、重量部31aに通常の回転をさせ、重量部31bを逆回転させた場合は、図6で示した重量部位置においては左旋回移動をおこなうことになり、かつ、図7や図11で示した重量部位置におけるモーターロボット1の左旋回移動より速く左旋回移動をおこなえることになる。
【0079】
又、上記の実施の形態では、図6〜図12の実施例で示したモーターロボット1の重量部位置において、前進や後退等の移動をおこなっているが、上記の実施例以外での重量部位置における移動動作は、それぞれにおいて変わるものである。
【0080】
更に、上記の実施例にあっては、重量部の位置や回転方向に応じてモーターロボット1の移動方向等が定まっているが、モーターロボット1の重心位置、脚体形状、軸体の胴部に対する配置位置、重量部の大きさ等の種々の要因によって実際の移動方向が定まるものと考えられる。従って、これらの要因を自在に変更できるようにモーターロボットを構成しておけば、より興味の深いロボットとなる。
【図面の簡単な説明】
【0081】
【図1】この発明の第1の実施の形態によるモーターロボットにおける第1の変形状態を示す斜視図である。
【図2】図1で示したモーターロボットの分解斜視図である。
【図3】図1で示したモーターロボットの、第1の変形状態から第2の変形状態へ変化する第1の変形態様を示した図である。
【図4】図3で示したモーターロボットの第2の変形態様を示した図である。
【図5】図3で示したモーターロボットの第3の変形態様を示した図である。
【図6】図5で示したモーターロボットが前進するときのウエイト部の重量部位置を示した図である。
【図7】図5で示したモーターロボットが左旋回するときのウエイト部の重量部位置を示した第1の図である。
【図8】図5で示したモーターロボットが右旋回するときのウエイト部の重量部位置を示した第1の図である。
【図9】図5で示したモーターロボットが後退するときのウエイト部の重量部位置を示した図である。
【図10】図5で示したモーターロボットが右旋回するときのウエイト部の重量部位置を示した第2の図である。
【図11】図5で示したモーターロボットが左旋回するときのウエイト部の重量部位置を示した第2の図である。
【図12】図5で示したモーターロボットが停止するときのウエイト部の重量部位置を示した図である。
【符号の説明】
【0082】
1 モーターロボット
2 車体カバー
3 車体
4 前バンパー
5 後バンパー
7 保護バー
12 前輪
13 後輪
27 軸体
28 レバー
30 ウエイト部
31 重量部
32 突出部
33 アーム
64 受部
65 開口
尚、各図中同一符号は同一又は相当部分を示す。
【特許請求の範囲】
【請求項1】
モーターロボットであって、
上下方向に配置された胴体と、
前記胴体の下部に接続され、前後方向に対してほぼ平行に配置された一対のソリ状の脚体と、
前記胴体に取付けられ、前記前後方向に対して直交するように水平方向に延びる軸体と、
前記胴体に取付けられ、前記軸体を回転させるように駆動する駆動手段と、
前記軸体の一方端部に接続され、前記軸体の回転に伴って回転する第1の回転体と、
前記軸体の他方端部に接続され、前記軸体の回転に伴って回転する第2の回転体とを備え、
前記第1の回転体と前記第2の回転体とは、前記軸体の回転によって前記軸体に加わる力を変化させることができるように構成される、モーターロボット。
【請求項2】
前記第1の回転体は、前記軸体に接続される第1の回転部と、前記第1の回転部に固定され、回転によって前記第1の回転部を介して前記軸体に加わる力を変化させる第1のウエイト部を含み、
前記第2の回転体は、前記軸体に接続される第2の回転部と、前記第2の回転部に固定され、回転によって前記第2の回転部を介して前記軸体に加わる力を変化させる第2のウエイト部を含む、請求項1記載のモーターロボット。
【請求項3】
前記第1の回転部は、前記軸体に対して回転位置を変えた状態で接続自在であり、タイヤ形状の第1の外輪部と、前記第1の外輪部に固定され、第1の開口を有する第1の受部とを含み、
前記第1のウエイト部は、前記第1の受部の前記第1の開口に脱着自在に接続される第1の突出部と、前記第1の突出部に接続されたリング状の第1の重量部とを含み、
前記第2の回転部は、前記軸体に対して回転位置を変えた状態で接続自在であり、タイヤ形状の第2の外輪部と、前記第2の外輪部に固定され、第2の開口を有する第2の受部とを含み、
前記第2のウエイト部は、前記第2の受部の前記第2の開口に脱着自在に接続される第2の突出部と、前記第2の突出部に接続されたリング状の第2の重量部とを含む、請求項2記載のモーターロボット。
【請求項4】
前記第1の重量部は、前記第1の突出部に対して屈曲自在の第1のアームを介して接続され、
前記第2の重量部は、前記第2の突出部に対して屈曲自在の第2のアームを介して接続される、請求項3記載のモーターロボット。
【請求項5】
前記胴体に取付けられ、前記駆動手段の駆動を制御する上下に移動自在であって、下方位置が前記第1の重量部及び前記第2の重量部の移動範囲の高さに含まれるレバーと、
前記レバーに対して前記水平方向に延びるように脱着自在に接続される保護バーとを更に備え、
前記レバーは、前記下方位置において前記駆動手段を駆動し、上方位置において前記駆動手段を停止する、請求項3または請求項4記載のモーターロボット。
【請求項6】
前記第1の回転部の下方位置において前記胴体に回動自在に接続されるタイヤ形状の第3の外輪部と、
前記第2の回転部の下方位置において前記胴体に回動自在に接続されるタイヤ形状の第4の外輪部と、
前記脚体の各々は、前記胴体に対して脱着自在に構成されると共に、前記胴体の上下に各々に取付けられ、
前記胴体は模型自動車の車体を構成し、
前記第1の外輪部から前記第4の外輪部の各々は、前記第1ウエイト部及び前記第2ウエイト部を外した状態で前記車体に取付けられた4輪のタイヤを構成し、
前記脚体の各々は、前記車体の前後取付けられた前バンパー及び後バンパーを構成する、請求項3から請求項5のいずれかに記載のモーターロボット。
【請求項7】
モーターロボットであって、
上下方向に配置された胴体と、
前記胴体の下部に接続され、前後方向に対してほぼ平行に配置された一対のソリ状の脚体と、
前記前後方向に対して直交するように水平方向を軸中心として前記胴体の一方側に取付けられ、前記軸中心に対して回転自在な第1の回転体と、
前記胴体の他方側に取付けられ、前記軸中心に対して回転自在な第2の回転体とを備え、
前記胴体に取付けられ、前記第1の回転体及び前記第2の回転体を回転させるように駆動する駆動手段とを備え、
前記第1の回転体と前記第2の回転体とは、回転によって前記軸体に加わる力を変化させることができるように構成される、モーターロボット。
【請求項1】
モーターロボットであって、
上下方向に配置された胴体と、
前記胴体の下部に接続され、前後方向に対してほぼ平行に配置された一対のソリ状の脚体と、
前記胴体に取付けられ、前記前後方向に対して直交するように水平方向に延びる軸体と、
前記胴体に取付けられ、前記軸体を回転させるように駆動する駆動手段と、
前記軸体の一方端部に接続され、前記軸体の回転に伴って回転する第1の回転体と、
前記軸体の他方端部に接続され、前記軸体の回転に伴って回転する第2の回転体とを備え、
前記第1の回転体と前記第2の回転体とは、前記軸体の回転によって前記軸体に加わる力を変化させることができるように構成される、モーターロボット。
【請求項2】
前記第1の回転体は、前記軸体に接続される第1の回転部と、前記第1の回転部に固定され、回転によって前記第1の回転部を介して前記軸体に加わる力を変化させる第1のウエイト部を含み、
前記第2の回転体は、前記軸体に接続される第2の回転部と、前記第2の回転部に固定され、回転によって前記第2の回転部を介して前記軸体に加わる力を変化させる第2のウエイト部を含む、請求項1記載のモーターロボット。
【請求項3】
前記第1の回転部は、前記軸体に対して回転位置を変えた状態で接続自在であり、タイヤ形状の第1の外輪部と、前記第1の外輪部に固定され、第1の開口を有する第1の受部とを含み、
前記第1のウエイト部は、前記第1の受部の前記第1の開口に脱着自在に接続される第1の突出部と、前記第1の突出部に接続されたリング状の第1の重量部とを含み、
前記第2の回転部は、前記軸体に対して回転位置を変えた状態で接続自在であり、タイヤ形状の第2の外輪部と、前記第2の外輪部に固定され、第2の開口を有する第2の受部とを含み、
前記第2のウエイト部は、前記第2の受部の前記第2の開口に脱着自在に接続される第2の突出部と、前記第2の突出部に接続されたリング状の第2の重量部とを含む、請求項2記載のモーターロボット。
【請求項4】
前記第1の重量部は、前記第1の突出部に対して屈曲自在の第1のアームを介して接続され、
前記第2の重量部は、前記第2の突出部に対して屈曲自在の第2のアームを介して接続される、請求項3記載のモーターロボット。
【請求項5】
前記胴体に取付けられ、前記駆動手段の駆動を制御する上下に移動自在であって、下方位置が前記第1の重量部及び前記第2の重量部の移動範囲の高さに含まれるレバーと、
前記レバーに対して前記水平方向に延びるように脱着自在に接続される保護バーとを更に備え、
前記レバーは、前記下方位置において前記駆動手段を駆動し、上方位置において前記駆動手段を停止する、請求項3または請求項4記載のモーターロボット。
【請求項6】
前記第1の回転部の下方位置において前記胴体に回動自在に接続されるタイヤ形状の第3の外輪部と、
前記第2の回転部の下方位置において前記胴体に回動自在に接続されるタイヤ形状の第4の外輪部と、
前記脚体の各々は、前記胴体に対して脱着自在に構成されると共に、前記胴体の上下に各々に取付けられ、
前記胴体は模型自動車の車体を構成し、
前記第1の外輪部から前記第4の外輪部の各々は、前記第1ウエイト部及び前記第2ウエイト部を外した状態で前記車体に取付けられた4輪のタイヤを構成し、
前記脚体の各々は、前記車体の前後取付けられた前バンパー及び後バンパーを構成する、請求項3から請求項5のいずれかに記載のモーターロボット。
【請求項7】
モーターロボットであって、
上下方向に配置された胴体と、
前記胴体の下部に接続され、前後方向に対してほぼ平行に配置された一対のソリ状の脚体と、
前記前後方向に対して直交するように水平方向を軸中心として前記胴体の一方側に取付けられ、前記軸中心に対して回転自在な第1の回転体と、
前記胴体の他方側に取付けられ、前記軸中心に対して回転自在な第2の回転体とを備え、
前記胴体に取付けられ、前記第1の回転体及び前記第2の回転体を回転させるように駆動する駆動手段とを備え、
前記第1の回転体と前記第2の回転体とは、回転によって前記軸体に加わる力を変化させることができるように構成される、モーターロボット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−153932(P2009−153932A)
【公開日】平成21年7月16日(2009.7.16)
【国際特許分類】
【出願番号】特願2007−338547(P2007−338547)
【出願日】平成19年12月28日(2007.12.28)
【出願人】(595020883)株式会社はくぶん (13)
【Fターム(参考)】
【公開日】平成21年7月16日(2009.7.16)
【国際特許分類】
【出願日】平成19年12月28日(2007.12.28)
【出願人】(595020883)株式会社はくぶん (13)
【Fターム(参考)】
[ Back to top ]