
モータ制御装置及び電動パワーステアリング装置

【課題】非昇圧制御時であっても正確な地絡検出が可能なモータ制御装置を提供すること。
【解決手段】マイコンは、昇圧回路における異常発生に伴う非昇圧制御時(ステップ201:NO)には、上記駆動回路に対する印加電圧V_bpigが電源電圧V_pigよりも低いこと(V_bpig<V_pig、ステップ207:YES)を、そのモータ線における地絡の発生を検出するための判定条件とする。そして、モータが回生状態にある場合に該当する印加電圧V_bpigが電源電圧V_pig以上である場合(V_bpig≧V_pig、ステップ207:NO)には、各モータ線に地絡が発生した旨の判定を行なわない(ステップ206)。
【解決手段】マイコンは、昇圧回路における異常発生に伴う非昇圧制御時(ステップ201:NO)には、上記駆動回路に対する印加電圧V_bpigが電源電圧V_pigよりも低いこと(V_bpig<V_pig、ステップ207:YES)を、そのモータ線における地絡の発生を検出するための判定条件とする。そして、モータが回生状態にある場合に該当する印加電圧V_bpigが電源電圧V_pig以上である場合(V_bpig≧V_pig、ステップ207:NO)には、各モータ線に地絡が発生した旨の判定を行なわない(ステップ206)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータ制御装置及び電動パワーステアリング装置に関するものである。
【背景技術】
【0002】
従来、モータと駆動回路との間を接続するモータ線に生じた地絡を検出する手法として、例えば、特許文献1等に示されるものの他、モータの自己インダクタンスに基づき地絡相に生ずる誘導電流を捉えることによって、その地絡の発生を検出する方法がある。
【0003】
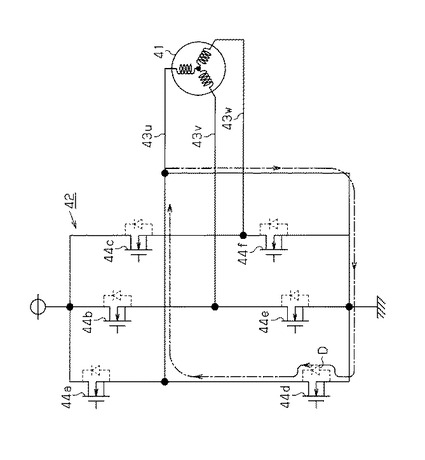
即ち、図6に示すように、モータ41と駆動回路42との間を接続する各モータ線43u,43v,43wのうち、例えば、U相のモータ線43uに地絡が生じた場合、そのU相の端子電圧は略接地電位(0V)まで低下するが、このとき、当該U相には、そのモータの自己インダクタンスに基づく誘導電流が発生する。
【0004】
つまり、モータ用の駆動回路42は、直列接続されたスイッチング素子対(44a,44d、44b,44e、及び44c,44f)を基本単位(アーム)として、これらを並列接続することにより構成されるとともに、近年では、これらの各スイッチング素子には電界効果型トランジスタ(FET)等の半導体スイッチを用いるのが一般的となっている。このため、上記地絡発生時には、そのU相下段側のFET44dがオフ状態であったとしても、当該地絡発生相であるU相には、その寄生ダイオードDを介して接地側から誘導電流が流れ込むことになる。そして、このような誘導電流の検出と併せて、端子電圧の低下、及び駆動回路42に対する印加電圧の低下を検出することにより、当該相における地絡の発生を検出するのである。
【特許文献1】特開平5−185937号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、電動パワーステアリング装置(EPS)等の用途に用いられるモータ制御装置には、昇圧回路により昇圧した電圧を駆動回路へと印加するものがあり、このようなモータ制御装置については、上記のような地絡検出方法が適用できない場合がある。
【0006】
即ち、上記のような昇圧電圧を駆動回路に印加するモータ制御装置には、その昇圧回路に異常が発生した場合、電源電圧を駆動回路に直接印加することによりモータ制御を継続するものがあり、その非昇圧制御時における印加電圧の低下によって、上記地絡検出の判定条件の一つが常に成立した状態になり得る。そして、これにより誤検出が引き起こされる可能性があり、この点において、なお改善の余地を残すものとなっていた。
【0007】
本発明は、上記問題点を解決するためになされたものであって、その目的は、非昇圧制御時であっても正確な地絡検出が可能なモータ制御装置、及び電動パワーステアリング装置を提供することにある。
【課題を解決するための手段】
【0008】
上記問題点を解決するために、請求項1に記載の発明は、印加電圧に基づく駆動電力を生成してモータに出力する駆動回路と、電源電圧を昇圧して前記駆動回路に印加する昇圧回路と、前記昇圧回路の異常を検出する異常検出手段と、前記モータと前記駆動回路とを接続するモータ線に生じた地絡を検出する地絡検出手段とを備え、前記地絡検出手段は、モータ電流、前記モータの端子電圧、及び前記駆動回路に対する印加電圧を監視することにより、その地絡判定を実行するものであって、前記昇圧回路の異常が検出された場合には、前記昇圧を行なうことなく前記電源電圧を前記駆動回路に印加する非昇圧制御が実行されるモータ制御装置において、前記モータが回生状態にあるか否かを判定する判定手段を備え、前記地絡検出手段は、前記非昇圧制御時において、前記モータが回生状態にある場合には、前記地絡が発生した旨の判定を行なわないこと、を要旨とする。
【0009】
即ち、地絡による誘導電流の発生時と同様の相電流値が検出される可能性があるのは、モータが回生状態にある場合であり、このような場合に、地絡の誤検出が起こりやすい。従って、上記構成のように、モータの回生時を地絡検出から除外することにより誤検出の発生を抑制することができ、その結果、非昇圧制御時における地絡検出の精度を高めることができるようになる。
【0010】
請求項2に記載の発明は、前記昇圧回路の異常が検出された場合には、前記昇圧回路を構成する半導体素子の寄生ダイオードを介して前記電源電圧が前記駆動回路に印加されるものであって、前記判定手段は、前記非昇圧制御時において、前記印加電圧が前記電源電圧を上回る場合に、前記回生状態にあると判定すること、を要旨とする。
【0011】
即ち、非昇圧制御時、昇圧回路を構成する半導体素子の寄生ダイオードを介して駆動回路に印加される印加電圧が電源電圧以上となるのは、モータが回生状態にある場合のみである。従って、上記構成によれば、容易且つ簡素な構成にて、モータの回生時を除外した地絡検出の実行が可能であり、その結果、誤検出の発生を抑制して、その非昇圧制御時における地絡検出の精度を高めることができる。
【0012】
請求項3に記載の発明は、請求項1又は請求項2の何れか一項に記載のモータ制御装置を備えた電動パワーステアリング装置であること、を要旨とする。
上記構成によれば、正確な地絡検出を担保して、より信頼性の高い電動パワーステアリング装置を提供することができる。
【発明の効果】
【0013】
本発明によれば、非昇圧制御時であっても正確な地絡検出が可能なモータ制御装置、及び電動パワーステアリング装置を提供することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明を電動パワーステアリング装置(EPS)に具体化した一実施形態を図面に従って説明する。
図1は、本実施形態のEPS1の概略構成図である。同図に示すように、ステアリングホイール(ステアリング)2が固定されたステアリングシャフト3は、ラックアンドピニオン機構4を介してラック5に連結されており、ステアリング操作に伴うステアリングシャフト3の回転は、ラックアンドピニオン機構4によりラック5の往復直線運動に変換される。そして、このラック5の往復直線運動により操舵輪6の舵角が変更されるようになっている。
【0015】
また、EPS1は、操舵系にステアリング操作を補助するためのアシスト力を付与する操舵力補助装置としてのEPSアクチュエータ10と、該EPSアクチュエータ10の作動を制御する制御手段としてのECU11とを備えている。
【0016】
本実施形態のEPSアクチュエータ10は、その駆動源であるモータ12がラック5と同軸に配置された所謂ラック型のEPSアクチュエータであり、モータ12が発生するアシストトルクは、ボールねじ機構(図示略)を介してラック5に伝達される。尚、本実施形態のモータ12は、ブラシレスモータであり、ECU11から三相(U,V,W)の駆動電力の供給を受けることにより回転する。そして、モータ制御装置としてのECU11は、このモータ12が発生するアシストトルクを制御することにより、操舵系に付与するアシスト力を制御する(パワーアシスト制御)。
【0017】
本実施形態では、ECU11には、トルクセンサ14及び車速センサ15が接続されている。そして、ECU11は、これらトルクセンサ14及び車速センサ15によりそれぞれ検出される操舵トルクτ及び車速Vに基づいて、EPSアクチュエータ10の作動を制御、即ちパワーアシスト制御を実行する。
【0018】
次に、本実施形態のEPSの電気的構成について説明する。
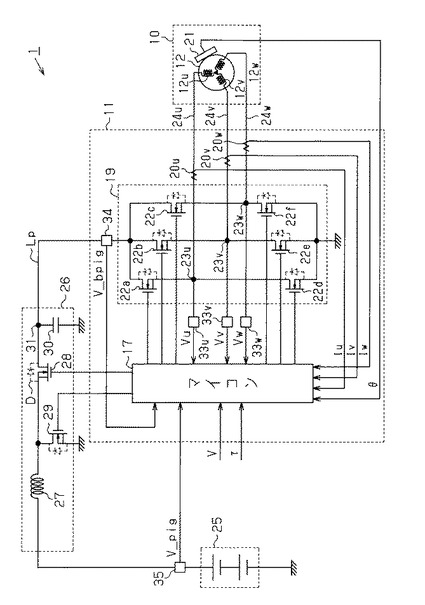
図2は、本実施形態のEPSの制御ブロック図である。同図に示すように、モータ制御装置としてのECU11は、モータ制御信号を出力するマイコン17と、マイコン17の出力するモータ制御信号に基づきモータ12に三相(U,V,W)の駆動電力を供給する駆動回路19とを備えている。
【0019】
詳述すると、本実施形態のECU11には、モータ12に通電される各相電流値Iu,Iv,Iwを検出するための電流センサ20u,20v,20w、及びモータ12の回転角θを検出するための回転角センサ21が接続されている。そして、マイコン17は、これら各センサの出力信号に基づき検出されたモータ12の各相電流値Iu,Iv,Iw及び回転角θ、並びに上記操舵トルクτ及び車速Vに基づいて駆動回路19にモータ制御信号を出力する。
【0020】
一方、本実施形態の駆動回路19には、直列に接続された一対のスイッチング素子(MOSFET)を並列に接続してなる周知のPWMインバータが採用されている。具体的には、駆動回路19は、FET22a,22d、FET22b,22e、及びFET22c,22fの各組の直列回路(アーム)を並列に接続してなり、これら各アームにおける電源側のFET22a,22b,22cと接地側のFET22d,22e,22fとの各接続点23u,23v,23wは、それぞれ対応する各相の出力端子となっている。そして、これら出力端子としての各接続点23u,23v,23wは、モータ線24u,24v,24wを介してモータ12の各相モータコイル12u,12v,12wに接続されている。
【0021】
また、各FET22a〜22fのゲート端子には、マイコン17の出力するモータ制御信号が入力されるようになっている。そして、本実施形態の駆動回路19は、このマイコン17の出力するモータ制御信号に応答して各FET22a〜22fがオン/オフすることにより、その印加電圧に基づく三相の駆動電力を生成し出力する構成となっている。
【0022】
ここで、本実施形態では、駆動回路19と直流電源であるバッテリ25とを接続する電源線Lpには、バッテリ25の電源電圧V_pigを昇圧して出力する昇圧回路26が設けられている。
【0023】
詳述すると、本実施形態の昇圧回路26は、昇圧コイル27、二つのスイッチング素子(FET28,29)、及び平滑コンデンサ30を接続することにより形成されている。具体的には、直流電源であるバッテリ25のプラス側に接続された昇圧コイル27の一端には、上記二つのFET28,29の一端がそれぞれ接続され、そのFET28の他端には、更に平滑コンデンサ30の一端が接続されている。そして、FET29及び平滑コンデンサ30の他端は、接地されている。
【0024】
また、各FET28,29のゲート端子には、マイコン17の出力する制御信号が入力されるようになっている。そして、本実施形態では、上記FET28と平滑コンデンサ30との間の接続点31が、その昇圧した電圧を出力する出力端子となっている。
【0025】
即ち、本実施形態の昇圧回路26は、マイコン17の出力する制御信号に基づき各FET28,29が交互にオン/オフすることにより、昇圧コイル27に誘起電圧を生じさせる。そして、その誘起電圧を電源電圧V_pigに重畳することにより、当該電源電圧V_pigを昇圧して出力する構成となっている。
【0026】
つまり、本実施形態では、この昇圧回路26により昇圧された電圧が、上記駆動回路19に対する印加電圧V_bpigとなっている。そして、駆動回路19は、その印加電圧V_bpigに基づいて、モータ12に供給する三相の駆動電力を生成する。
【0027】
また、本実施形態のマイコン17は、上記のような昇圧回路26の作動を制御する制御手段としての機能に加え、当該昇圧回路26の異常(詳しくは、その非出力側のFET29の故障)を検出する異常検出手段としての機能を備えている。そして、その昇圧回路26の異常が検出された場合には、上記昇圧回路26による昇圧を停止する。
【0028】
即ち、図3のフローチャートに示すように、昇圧回路26の異常検出処理を実行し(ステップ101)、同昇圧回路26が正常であるか否かを判定する(ステップ102)。そして、正常である場合(ステップ102:YES)には、通常の昇圧制御を実行する(ステップ103)。そして、上記ステップ102において、異常であると判定した場合(ステップ102:NO)には、昇圧回路26による昇圧を停止する非昇圧制御へと移行する(ステップ104)。
【0029】
尚、本実施形態では、このような非昇圧制御時には、昇圧回路26を構成する半導体素子としてのFET28の寄生ダイオードを介して、電源電圧V_pigが駆動回路19に印加される。そして、こうした電源電圧V_pigを駆動回路19に印加した状態で、そのモータ制御が継続される構成になっている。
【0030】
(モータ線地絡検出)
次に、本実施形態におけるモータ線地絡検出の態様について説明する。
本実施形態では、マイコン17には、モータ12と駆動回路19との間を接続する各モータ線24u,24v,24wに生じた地絡を検出する地絡検出手段としての機能が備えられている。
【0031】
詳述すると、本実施形態のマイコン17には、上記各電流センサ20u,20v,20wにより検出される各相電流値Iu,Iv,Iwに加えて、電圧センサ33u,33v,33wにより検出される各相の端子電圧Vu,Vv,Vw、及び電圧センサ34により検出される駆動回路19への印加電圧V_bpigが入力されるようになっている。そして、マイコン17は、これらモータ電流としての各相電流値Iu,Iv,Iw、各相の端子電圧Vu,Vv,Vw、及び駆動回路19に対する印加電圧V_bpigを監視することにより、各モータ線24u,24v,24wにおける地絡の発生を検出する。
【0032】
即ち、地絡発生によって、当該地絡発生相の端子電圧は略接地電位(0V)まで低下するとともに、その貫通電流により駆動回路19に対する印加電圧V_bpigは大きく低下する。そして、これに加え、当該地絡発生相には、モータ12の自己インダクタンスに基づく誘導電流が発生する(図6参照)。
【0033】
従って、通常の制御時(昇圧制御実行時)であれば、上記のように、これら各相電流値Iu,Iv,Iw、各相の端子電圧Vu,Vv,Vw、及び印加電圧V_bpigを監視することにより、各モータ線24u,24v,24wにおける地絡の発生を検出することが可能である。具体的には、印加電圧V_bpigが低下し、且つ何れかの相の端子電圧が略接地電位(0V)まで低下しているにも関わらず、大きな相電流値が検出される場合には、当該相に地絡が発生しているものと判定することができる。
【0034】
ところが、上述のように、非昇圧制御時には、その印加電圧V_bpigの低下によって、上記地絡検出の判定条件の一つが常に成立した状態になり、これにより誤検出が引き起こされる可能性がある。
【0035】
この点を踏まえ、本実施形態のマイコン17は、上記のような昇圧回路26における異常発生に伴う非昇圧制御時には、上記駆動回路19に対する印加電圧V_bpigが電源電圧V_pigよりも低いことを、その判定条件とする。尚、本実施形態では、電圧センサ35により検出された実際の印加電圧V_bpigがマイコン17へと入力されるようになっている。そして、その印加電圧V_bpigが電源電圧V_pig以上である場合には、各モータ線24u,24v,24wに地絡が発生した旨の判定を行なわない。
【0036】
即ち、地絡による誘導電流の発生時と同様の相電流値が検出される可能性があるのは、モータ12が回生状態にある場合であり、上記のような誤検出は、このような場合に発生しやすい。また、本実施形態のように、非昇圧制御時、半導体素子としてのFET28の寄生ダイオードを介して電源電圧V_pigを駆動回路19に印加する構成では、印加電圧V_bpigが電源電圧V_pig以上となるのは、モータ12が回生状態にある場合のみである。そして、本実施形態では、このような場合に、地絡が発生した旨の判定を行なわないことにより、モータ12の回生時を除外して、その非昇圧制御時における地絡検出の精度を高める構成となっている。
【0037】
次に、本実施形態におけるモータ線地絡検出の処理手順について説明する。
図4のフローチャートに示すように、本実施形態のマイコン17は、先ず、昇圧回路26による昇圧を実行する昇圧制御中であるか否かを判定する(ステップ201)。そして、昇圧制御中であると判定した場合(ステップ201:YES)には、次のステップ202〜ステップ204に示されるモータ線における地絡の発生を検出するための各判定処理を実行する。
【0038】
具体的には、マイコン17は、駆動回路19に対する印加電圧V_bpigが所定電圧V0よりも低下したか否か(ステップ202)、判定相(X相、X=U,V,W)の端子電圧Vxが所定電圧V1よりも低下したか否か(ステップ203)、及び判定相の相電流値Ixが所定値I0よりも大きいか否か(ステップ204)を判定する。尚、所定電圧V1には、接地電圧近傍の値が設定されている(V1>0)。そして、マイコン17は、これら各判定条件の全てが成立した場合(V_bpig<V0、Vx<V1、及びIx>I0、ステップ202〜ステップ204:全てYES)には、その判定相に地絡が発生したものと判定する(ステップ205)。
【0039】
尚、上記ステップ202〜ステップ204において、何れかの判定条件が不成立であった場合(V_bpig≧V0、Vx≧V1、又はIx≦I0、ステップ202〜ステップ204:何れかがNO)には、その判定相に地絡が発生した旨の判定は行なわない(ステップ206)。
【0040】
一方、上記ステップ201において、非昇圧制御中であると判定した場合(ステップ201:NO)、マイコン17は、上記ステップ202を実行することなく、駆動回路19に対する印加電圧V_bpigが電源電圧V_pigよりも低いか否かを判定する(ステップ207)。そして、印加電圧V_bpigが電源電圧V_pigよりも高い場合(V_bpig≧V_pig、ステップ207:NO)には、上記ステップ203,204の処理を実行せず、その判定相に地絡が発生した旨の判定は行なわない(ステップ206)。
【0041】
そして、このステップ207において、印加電圧V_bpigが電源電圧V_pigよりも低いと判定した場合(V_bpig<V_pig、ステップ207:YES)には、昇圧制御時と同様、ステップ203以降の処理を実行する。
【0042】
以上、本実施形態によれば、以下のような作用・効果を得ることができる。
○マイコンは、昇圧回路における異常発生に伴う非昇圧制御時(ステップ201:NO)には、上記駆動回路に対する印加電圧V_bpigが電源電圧V_pigよりも低いこと(V_bpig<V_pig、ステップ207:YES)を、そのモータ線における地絡の発生を検出するための判定条件とする。そして、モータが回生状態にある場合に該当する印加電圧V_bpigが電源電圧V_pig以上である場合(V_bpig≧V_pig、ステップ207:NO)には、各モータ線に地絡が発生した旨の判定を行なわない(ステップ206)。
【0043】
即ち、地絡による誘導電流の発生時と同様の相電流値が検出される可能性があるのは、モータ12が回生状態にある場合であり、このような場合に、地絡の誤検出が起こりやすい。そして、非昇圧制御時、半導体素子としてのFET28の寄生ダイオードを介して電源電圧V_pigを駆動回路19に印加する場合において、その印加電圧V_bpigが電源電圧V_pig以上となるのは、モータ12が回生状態にある場合のみである。従って、上記構成によれば、容易且つ簡素な構成にて、モータ12の回生時を除外した地絡検出の実行が可能であり、その結果、誤検出の発生を抑制して、その非昇圧制御時における地絡検出の精度を高めることができる。
【0044】
なお、本実施形態は以下のように変更してもよい。
・本実施形態では、判定手段としてのマイコン17は、印加電圧V_bpigが電源電圧V_pigよりも低いか否かの判定(図4参照、ステップ207)により、モータ12が回生状態にあることを検知する。そして、当該回生状態にある場合、即ち印加電圧V_bpigが電源電圧V_pigよりも高い場合(同ステップ207:NO)には、モータ線に地絡が発生した旨の判定を行なわないこととした。しかし、これに限らず、例えばモータ12の回転角速度を用いる等、その他の方法により回生状態にあるか否かの判定をして、回生状態にある場合には、モータ線に地絡が発生した旨の判定を行なわない構成としてもよい。このような構成としても本実施形態と同様の効果を得ることができる。尚、この場合、貫通電流の発生による印加電圧V_bpigの低下を判定する処理を別途追加するとよい。
【0045】
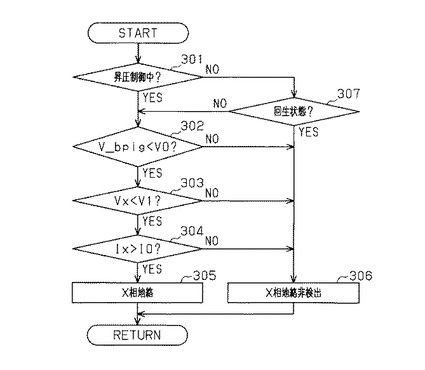
具体的には、図5のフローチャートに示すように、先ず昇圧制御中であるか否かを判定し(ステップ301)、該昇圧制御中である場合(ステップ301:YES)には、地絡発生時に相当する印加電圧V_bpigの低下があるか否かを判定する(ステップ302)。そして、当該印加電圧V_bpigの低下がある場合(V_bpig<V0、ステップ302:YES)には、上記本実施形態と同様の短絡検出に関する判定処理を実行する(ステップ303〜ステップ306)。尚、ステップ303〜ステップ306の処理は、図4におけるステップ203〜ステップ206の処理を同一であるため、その説明は省略する。そして、上記ステップ302において、印加電圧V_bpigの低下が無いと判定した場合(V_bpig≧V0、ステップ302:NO)には、ステップ304及びステップ305の処理を実行せず、モータ線に地絡が発生した旨の判定も行なわない(ステップ306)。
【0046】
一方、上記ステップ301において、昇圧制御中ではないと判定した場合(ステップ301:NO)、モータ12が回生状態にあるか否かを判定し(ステップ307)、該回生状態にある場合(ステップ307:YES)には、モータ線に地絡が発生した旨の判定は行なわない(ステップ306)。そして、モータ12が回生状態にないと判定した場合(ステップ307)には、上記昇圧制御中である場合(ステップ301:YES)と同様にステップ302以降の処理を実行すればよい。
【0047】
・本実施形態では、本発明を昇圧機能付き電動パワーステアリング装置(EPS)に具体化したが、これに限らず、その他用途に用いられるモータ制御装置に具体化してもよい。
【0048】
・本実施形態では、電圧センサ35により検出した電源電圧V_pigを印加電圧V_bpigとの比較に用いたが、これを電源電圧V_pigの値として予め設定された所定値との比較する構成に変更してもよい。
【図面の簡単な説明】
【0049】
【図1】電動パワーステアリング装置(EPS)の概略構成図。
【図2】本実施形態におけるEPSの電気的構成を示す制御ブロック図。
【図3】昇圧切替制御の処理手順を示すフローチャート。
【図4】本実施形態におけるモータ線地絡検出の処理手順を示すフローチャート。
【図5】別例のモータ線地絡検出の処理手順を示すフローチャート。
【図6】従来のモータ線地絡検出の態様を示す説明図。
【符号の説明】
【0050】
1…電動パワーステアリング装置(EPS)、10…EPSアクチュエータ、11…EPSECU、12…モータ、17…マイコン、19…駆動回路、20u,20v,20w…電流センサ、22a〜22f…FET、23u,23v,23w…接続点、24u,24v,24w…モータ線、25…バッテリ、26…昇圧回路、28,29…FET、33u,33v,33w,34,35…電圧センサ、D…寄生ダイオード、Ix,Iu,Iv,Iw…相電流値、I0…所定値、Vx,Vu,Vv,Vw…端子電圧、V_pig…電源電圧、V_bpig…印加電圧、V0,V1…所定電圧。
【技術分野】
【0001】
本発明は、モータ制御装置及び電動パワーステアリング装置に関するものである。
【背景技術】
【0002】
従来、モータと駆動回路との間を接続するモータ線に生じた地絡を検出する手法として、例えば、特許文献1等に示されるものの他、モータの自己インダクタンスに基づき地絡相に生ずる誘導電流を捉えることによって、その地絡の発生を検出する方法がある。
【0003】
即ち、図6に示すように、モータ41と駆動回路42との間を接続する各モータ線43u,43v,43wのうち、例えば、U相のモータ線43uに地絡が生じた場合、そのU相の端子電圧は略接地電位(0V)まで低下するが、このとき、当該U相には、そのモータの自己インダクタンスに基づく誘導電流が発生する。
【0004】
つまり、モータ用の駆動回路42は、直列接続されたスイッチング素子対(44a,44d、44b,44e、及び44c,44f)を基本単位(アーム)として、これらを並列接続することにより構成されるとともに、近年では、これらの各スイッチング素子には電界効果型トランジスタ(FET)等の半導体スイッチを用いるのが一般的となっている。このため、上記地絡発生時には、そのU相下段側のFET44dがオフ状態であったとしても、当該地絡発生相であるU相には、その寄生ダイオードDを介して接地側から誘導電流が流れ込むことになる。そして、このような誘導電流の検出と併せて、端子電圧の低下、及び駆動回路42に対する印加電圧の低下を検出することにより、当該相における地絡の発生を検出するのである。
【特許文献1】特開平5−185937号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、電動パワーステアリング装置(EPS)等の用途に用いられるモータ制御装置には、昇圧回路により昇圧した電圧を駆動回路へと印加するものがあり、このようなモータ制御装置については、上記のような地絡検出方法が適用できない場合がある。
【0006】
即ち、上記のような昇圧電圧を駆動回路に印加するモータ制御装置には、その昇圧回路に異常が発生した場合、電源電圧を駆動回路に直接印加することによりモータ制御を継続するものがあり、その非昇圧制御時における印加電圧の低下によって、上記地絡検出の判定条件の一つが常に成立した状態になり得る。そして、これにより誤検出が引き起こされる可能性があり、この点において、なお改善の余地を残すものとなっていた。
【0007】
本発明は、上記問題点を解決するためになされたものであって、その目的は、非昇圧制御時であっても正確な地絡検出が可能なモータ制御装置、及び電動パワーステアリング装置を提供することにある。
【課題を解決するための手段】
【0008】
上記問題点を解決するために、請求項1に記載の発明は、印加電圧に基づく駆動電力を生成してモータに出力する駆動回路と、電源電圧を昇圧して前記駆動回路に印加する昇圧回路と、前記昇圧回路の異常を検出する異常検出手段と、前記モータと前記駆動回路とを接続するモータ線に生じた地絡を検出する地絡検出手段とを備え、前記地絡検出手段は、モータ電流、前記モータの端子電圧、及び前記駆動回路に対する印加電圧を監視することにより、その地絡判定を実行するものであって、前記昇圧回路の異常が検出された場合には、前記昇圧を行なうことなく前記電源電圧を前記駆動回路に印加する非昇圧制御が実行されるモータ制御装置において、前記モータが回生状態にあるか否かを判定する判定手段を備え、前記地絡検出手段は、前記非昇圧制御時において、前記モータが回生状態にある場合には、前記地絡が発生した旨の判定を行なわないこと、を要旨とする。
【0009】
即ち、地絡による誘導電流の発生時と同様の相電流値が検出される可能性があるのは、モータが回生状態にある場合であり、このような場合に、地絡の誤検出が起こりやすい。従って、上記構成のように、モータの回生時を地絡検出から除外することにより誤検出の発生を抑制することができ、その結果、非昇圧制御時における地絡検出の精度を高めることができるようになる。
【0010】
請求項2に記載の発明は、前記昇圧回路の異常が検出された場合には、前記昇圧回路を構成する半導体素子の寄生ダイオードを介して前記電源電圧が前記駆動回路に印加されるものであって、前記判定手段は、前記非昇圧制御時において、前記印加電圧が前記電源電圧を上回る場合に、前記回生状態にあると判定すること、を要旨とする。
【0011】
即ち、非昇圧制御時、昇圧回路を構成する半導体素子の寄生ダイオードを介して駆動回路に印加される印加電圧が電源電圧以上となるのは、モータが回生状態にある場合のみである。従って、上記構成によれば、容易且つ簡素な構成にて、モータの回生時を除外した地絡検出の実行が可能であり、その結果、誤検出の発生を抑制して、その非昇圧制御時における地絡検出の精度を高めることができる。
【0012】
請求項3に記載の発明は、請求項1又は請求項2の何れか一項に記載のモータ制御装置を備えた電動パワーステアリング装置であること、を要旨とする。
上記構成によれば、正確な地絡検出を担保して、より信頼性の高い電動パワーステアリング装置を提供することができる。
【発明の効果】
【0013】
本発明によれば、非昇圧制御時であっても正確な地絡検出が可能なモータ制御装置、及び電動パワーステアリング装置を提供することができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明を電動パワーステアリング装置(EPS)に具体化した一実施形態を図面に従って説明する。
図1は、本実施形態のEPS1の概略構成図である。同図に示すように、ステアリングホイール(ステアリング)2が固定されたステアリングシャフト3は、ラックアンドピニオン機構4を介してラック5に連結されており、ステアリング操作に伴うステアリングシャフト3の回転は、ラックアンドピニオン機構4によりラック5の往復直線運動に変換される。そして、このラック5の往復直線運動により操舵輪6の舵角が変更されるようになっている。
【0015】
また、EPS1は、操舵系にステアリング操作を補助するためのアシスト力を付与する操舵力補助装置としてのEPSアクチュエータ10と、該EPSアクチュエータ10の作動を制御する制御手段としてのECU11とを備えている。
【0016】
本実施形態のEPSアクチュエータ10は、その駆動源であるモータ12がラック5と同軸に配置された所謂ラック型のEPSアクチュエータであり、モータ12が発生するアシストトルクは、ボールねじ機構(図示略)を介してラック5に伝達される。尚、本実施形態のモータ12は、ブラシレスモータであり、ECU11から三相(U,V,W)の駆動電力の供給を受けることにより回転する。そして、モータ制御装置としてのECU11は、このモータ12が発生するアシストトルクを制御することにより、操舵系に付与するアシスト力を制御する(パワーアシスト制御)。
【0017】
本実施形態では、ECU11には、トルクセンサ14及び車速センサ15が接続されている。そして、ECU11は、これらトルクセンサ14及び車速センサ15によりそれぞれ検出される操舵トルクτ及び車速Vに基づいて、EPSアクチュエータ10の作動を制御、即ちパワーアシスト制御を実行する。
【0018】
次に、本実施形態のEPSの電気的構成について説明する。
図2は、本実施形態のEPSの制御ブロック図である。同図に示すように、モータ制御装置としてのECU11は、モータ制御信号を出力するマイコン17と、マイコン17の出力するモータ制御信号に基づきモータ12に三相(U,V,W)の駆動電力を供給する駆動回路19とを備えている。
【0019】
詳述すると、本実施形態のECU11には、モータ12に通電される各相電流値Iu,Iv,Iwを検出するための電流センサ20u,20v,20w、及びモータ12の回転角θを検出するための回転角センサ21が接続されている。そして、マイコン17は、これら各センサの出力信号に基づき検出されたモータ12の各相電流値Iu,Iv,Iw及び回転角θ、並びに上記操舵トルクτ及び車速Vに基づいて駆動回路19にモータ制御信号を出力する。
【0020】
一方、本実施形態の駆動回路19には、直列に接続された一対のスイッチング素子(MOSFET)を並列に接続してなる周知のPWMインバータが採用されている。具体的には、駆動回路19は、FET22a,22d、FET22b,22e、及びFET22c,22fの各組の直列回路(アーム)を並列に接続してなり、これら各アームにおける電源側のFET22a,22b,22cと接地側のFET22d,22e,22fとの各接続点23u,23v,23wは、それぞれ対応する各相の出力端子となっている。そして、これら出力端子としての各接続点23u,23v,23wは、モータ線24u,24v,24wを介してモータ12の各相モータコイル12u,12v,12wに接続されている。
【0021】
また、各FET22a〜22fのゲート端子には、マイコン17の出力するモータ制御信号が入力されるようになっている。そして、本実施形態の駆動回路19は、このマイコン17の出力するモータ制御信号に応答して各FET22a〜22fがオン/オフすることにより、その印加電圧に基づく三相の駆動電力を生成し出力する構成となっている。
【0022】
ここで、本実施形態では、駆動回路19と直流電源であるバッテリ25とを接続する電源線Lpには、バッテリ25の電源電圧V_pigを昇圧して出力する昇圧回路26が設けられている。
【0023】
詳述すると、本実施形態の昇圧回路26は、昇圧コイル27、二つのスイッチング素子(FET28,29)、及び平滑コンデンサ30を接続することにより形成されている。具体的には、直流電源であるバッテリ25のプラス側に接続された昇圧コイル27の一端には、上記二つのFET28,29の一端がそれぞれ接続され、そのFET28の他端には、更に平滑コンデンサ30の一端が接続されている。そして、FET29及び平滑コンデンサ30の他端は、接地されている。
【0024】
また、各FET28,29のゲート端子には、マイコン17の出力する制御信号が入力されるようになっている。そして、本実施形態では、上記FET28と平滑コンデンサ30との間の接続点31が、その昇圧した電圧を出力する出力端子となっている。
【0025】
即ち、本実施形態の昇圧回路26は、マイコン17の出力する制御信号に基づき各FET28,29が交互にオン/オフすることにより、昇圧コイル27に誘起電圧を生じさせる。そして、その誘起電圧を電源電圧V_pigに重畳することにより、当該電源電圧V_pigを昇圧して出力する構成となっている。
【0026】
つまり、本実施形態では、この昇圧回路26により昇圧された電圧が、上記駆動回路19に対する印加電圧V_bpigとなっている。そして、駆動回路19は、その印加電圧V_bpigに基づいて、モータ12に供給する三相の駆動電力を生成する。
【0027】
また、本実施形態のマイコン17は、上記のような昇圧回路26の作動を制御する制御手段としての機能に加え、当該昇圧回路26の異常(詳しくは、その非出力側のFET29の故障)を検出する異常検出手段としての機能を備えている。そして、その昇圧回路26の異常が検出された場合には、上記昇圧回路26による昇圧を停止する。
【0028】
即ち、図3のフローチャートに示すように、昇圧回路26の異常検出処理を実行し(ステップ101)、同昇圧回路26が正常であるか否かを判定する(ステップ102)。そして、正常である場合(ステップ102:YES)には、通常の昇圧制御を実行する(ステップ103)。そして、上記ステップ102において、異常であると判定した場合(ステップ102:NO)には、昇圧回路26による昇圧を停止する非昇圧制御へと移行する(ステップ104)。
【0029】
尚、本実施形態では、このような非昇圧制御時には、昇圧回路26を構成する半導体素子としてのFET28の寄生ダイオードを介して、電源電圧V_pigが駆動回路19に印加される。そして、こうした電源電圧V_pigを駆動回路19に印加した状態で、そのモータ制御が継続される構成になっている。
【0030】
(モータ線地絡検出)
次に、本実施形態におけるモータ線地絡検出の態様について説明する。
本実施形態では、マイコン17には、モータ12と駆動回路19との間を接続する各モータ線24u,24v,24wに生じた地絡を検出する地絡検出手段としての機能が備えられている。
【0031】
詳述すると、本実施形態のマイコン17には、上記各電流センサ20u,20v,20wにより検出される各相電流値Iu,Iv,Iwに加えて、電圧センサ33u,33v,33wにより検出される各相の端子電圧Vu,Vv,Vw、及び電圧センサ34により検出される駆動回路19への印加電圧V_bpigが入力されるようになっている。そして、マイコン17は、これらモータ電流としての各相電流値Iu,Iv,Iw、各相の端子電圧Vu,Vv,Vw、及び駆動回路19に対する印加電圧V_bpigを監視することにより、各モータ線24u,24v,24wにおける地絡の発生を検出する。
【0032】
即ち、地絡発生によって、当該地絡発生相の端子電圧は略接地電位(0V)まで低下するとともに、その貫通電流により駆動回路19に対する印加電圧V_bpigは大きく低下する。そして、これに加え、当該地絡発生相には、モータ12の自己インダクタンスに基づく誘導電流が発生する(図6参照)。
【0033】
従って、通常の制御時(昇圧制御実行時)であれば、上記のように、これら各相電流値Iu,Iv,Iw、各相の端子電圧Vu,Vv,Vw、及び印加電圧V_bpigを監視することにより、各モータ線24u,24v,24wにおける地絡の発生を検出することが可能である。具体的には、印加電圧V_bpigが低下し、且つ何れかの相の端子電圧が略接地電位(0V)まで低下しているにも関わらず、大きな相電流値が検出される場合には、当該相に地絡が発生しているものと判定することができる。
【0034】
ところが、上述のように、非昇圧制御時には、その印加電圧V_bpigの低下によって、上記地絡検出の判定条件の一つが常に成立した状態になり、これにより誤検出が引き起こされる可能性がある。
【0035】
この点を踏まえ、本実施形態のマイコン17は、上記のような昇圧回路26における異常発生に伴う非昇圧制御時には、上記駆動回路19に対する印加電圧V_bpigが電源電圧V_pigよりも低いことを、その判定条件とする。尚、本実施形態では、電圧センサ35により検出された実際の印加電圧V_bpigがマイコン17へと入力されるようになっている。そして、その印加電圧V_bpigが電源電圧V_pig以上である場合には、各モータ線24u,24v,24wに地絡が発生した旨の判定を行なわない。
【0036】
即ち、地絡による誘導電流の発生時と同様の相電流値が検出される可能性があるのは、モータ12が回生状態にある場合であり、上記のような誤検出は、このような場合に発生しやすい。また、本実施形態のように、非昇圧制御時、半導体素子としてのFET28の寄生ダイオードを介して電源電圧V_pigを駆動回路19に印加する構成では、印加電圧V_bpigが電源電圧V_pig以上となるのは、モータ12が回生状態にある場合のみである。そして、本実施形態では、このような場合に、地絡が発生した旨の判定を行なわないことにより、モータ12の回生時を除外して、その非昇圧制御時における地絡検出の精度を高める構成となっている。
【0037】
次に、本実施形態におけるモータ線地絡検出の処理手順について説明する。
図4のフローチャートに示すように、本実施形態のマイコン17は、先ず、昇圧回路26による昇圧を実行する昇圧制御中であるか否かを判定する(ステップ201)。そして、昇圧制御中であると判定した場合(ステップ201:YES)には、次のステップ202〜ステップ204に示されるモータ線における地絡の発生を検出するための各判定処理を実行する。
【0038】
具体的には、マイコン17は、駆動回路19に対する印加電圧V_bpigが所定電圧V0よりも低下したか否か(ステップ202)、判定相(X相、X=U,V,W)の端子電圧Vxが所定電圧V1よりも低下したか否か(ステップ203)、及び判定相の相電流値Ixが所定値I0よりも大きいか否か(ステップ204)を判定する。尚、所定電圧V1には、接地電圧近傍の値が設定されている(V1>0)。そして、マイコン17は、これら各判定条件の全てが成立した場合(V_bpig<V0、Vx<V1、及びIx>I0、ステップ202〜ステップ204:全てYES)には、その判定相に地絡が発生したものと判定する(ステップ205)。
【0039】
尚、上記ステップ202〜ステップ204において、何れかの判定条件が不成立であった場合(V_bpig≧V0、Vx≧V1、又はIx≦I0、ステップ202〜ステップ204:何れかがNO)には、その判定相に地絡が発生した旨の判定は行なわない(ステップ206)。
【0040】
一方、上記ステップ201において、非昇圧制御中であると判定した場合(ステップ201:NO)、マイコン17は、上記ステップ202を実行することなく、駆動回路19に対する印加電圧V_bpigが電源電圧V_pigよりも低いか否かを判定する(ステップ207)。そして、印加電圧V_bpigが電源電圧V_pigよりも高い場合(V_bpig≧V_pig、ステップ207:NO)には、上記ステップ203,204の処理を実行せず、その判定相に地絡が発生した旨の判定は行なわない(ステップ206)。
【0041】
そして、このステップ207において、印加電圧V_bpigが電源電圧V_pigよりも低いと判定した場合(V_bpig<V_pig、ステップ207:YES)には、昇圧制御時と同様、ステップ203以降の処理を実行する。
【0042】
以上、本実施形態によれば、以下のような作用・効果を得ることができる。
○マイコンは、昇圧回路における異常発生に伴う非昇圧制御時(ステップ201:NO)には、上記駆動回路に対する印加電圧V_bpigが電源電圧V_pigよりも低いこと(V_bpig<V_pig、ステップ207:YES)を、そのモータ線における地絡の発生を検出するための判定条件とする。そして、モータが回生状態にある場合に該当する印加電圧V_bpigが電源電圧V_pig以上である場合(V_bpig≧V_pig、ステップ207:NO)には、各モータ線に地絡が発生した旨の判定を行なわない(ステップ206)。
【0043】
即ち、地絡による誘導電流の発生時と同様の相電流値が検出される可能性があるのは、モータ12が回生状態にある場合であり、このような場合に、地絡の誤検出が起こりやすい。そして、非昇圧制御時、半導体素子としてのFET28の寄生ダイオードを介して電源電圧V_pigを駆動回路19に印加する場合において、その印加電圧V_bpigが電源電圧V_pig以上となるのは、モータ12が回生状態にある場合のみである。従って、上記構成によれば、容易且つ簡素な構成にて、モータ12の回生時を除外した地絡検出の実行が可能であり、その結果、誤検出の発生を抑制して、その非昇圧制御時における地絡検出の精度を高めることができる。
【0044】
なお、本実施形態は以下のように変更してもよい。
・本実施形態では、判定手段としてのマイコン17は、印加電圧V_bpigが電源電圧V_pigよりも低いか否かの判定(図4参照、ステップ207)により、モータ12が回生状態にあることを検知する。そして、当該回生状態にある場合、即ち印加電圧V_bpigが電源電圧V_pigよりも高い場合(同ステップ207:NO)には、モータ線に地絡が発生した旨の判定を行なわないこととした。しかし、これに限らず、例えばモータ12の回転角速度を用いる等、その他の方法により回生状態にあるか否かの判定をして、回生状態にある場合には、モータ線に地絡が発生した旨の判定を行なわない構成としてもよい。このような構成としても本実施形態と同様の効果を得ることができる。尚、この場合、貫通電流の発生による印加電圧V_bpigの低下を判定する処理を別途追加するとよい。
【0045】
具体的には、図5のフローチャートに示すように、先ず昇圧制御中であるか否かを判定し(ステップ301)、該昇圧制御中である場合(ステップ301:YES)には、地絡発生時に相当する印加電圧V_bpigの低下があるか否かを判定する(ステップ302)。そして、当該印加電圧V_bpigの低下がある場合(V_bpig<V0、ステップ302:YES)には、上記本実施形態と同様の短絡検出に関する判定処理を実行する(ステップ303〜ステップ306)。尚、ステップ303〜ステップ306の処理は、図4におけるステップ203〜ステップ206の処理を同一であるため、その説明は省略する。そして、上記ステップ302において、印加電圧V_bpigの低下が無いと判定した場合(V_bpig≧V0、ステップ302:NO)には、ステップ304及びステップ305の処理を実行せず、モータ線に地絡が発生した旨の判定も行なわない(ステップ306)。
【0046】
一方、上記ステップ301において、昇圧制御中ではないと判定した場合(ステップ301:NO)、モータ12が回生状態にあるか否かを判定し(ステップ307)、該回生状態にある場合(ステップ307:YES)には、モータ線に地絡が発生した旨の判定は行なわない(ステップ306)。そして、モータ12が回生状態にないと判定した場合(ステップ307)には、上記昇圧制御中である場合(ステップ301:YES)と同様にステップ302以降の処理を実行すればよい。
【0047】
・本実施形態では、本発明を昇圧機能付き電動パワーステアリング装置(EPS)に具体化したが、これに限らず、その他用途に用いられるモータ制御装置に具体化してもよい。
【0048】
・本実施形態では、電圧センサ35により検出した電源電圧V_pigを印加電圧V_bpigとの比較に用いたが、これを電源電圧V_pigの値として予め設定された所定値との比較する構成に変更してもよい。
【図面の簡単な説明】
【0049】
【図1】電動パワーステアリング装置(EPS)の概略構成図。
【図2】本実施形態におけるEPSの電気的構成を示す制御ブロック図。
【図3】昇圧切替制御の処理手順を示すフローチャート。
【図4】本実施形態におけるモータ線地絡検出の処理手順を示すフローチャート。
【図5】別例のモータ線地絡検出の処理手順を示すフローチャート。
【図6】従来のモータ線地絡検出の態様を示す説明図。
【符号の説明】
【0050】
1…電動パワーステアリング装置(EPS)、10…EPSアクチュエータ、11…EPSECU、12…モータ、17…マイコン、19…駆動回路、20u,20v,20w…電流センサ、22a〜22f…FET、23u,23v,23w…接続点、24u,24v,24w…モータ線、25…バッテリ、26…昇圧回路、28,29…FET、33u,33v,33w,34,35…電圧センサ、D…寄生ダイオード、Ix,Iu,Iv,Iw…相電流値、I0…所定値、Vx,Vu,Vv,Vw…端子電圧、V_pig…電源電圧、V_bpig…印加電圧、V0,V1…所定電圧。
【特許請求の範囲】
【請求項1】
印加電圧に基づく駆動電力を生成してモータに出力する駆動回路と、電源電圧を昇圧して前記駆動回路に印加する昇圧回路と、前記昇圧回路の異常を検出する異常検出手段と、前記モータと前記駆動回路とを接続するモータ線に生じた地絡を検出する地絡検出手段とを備え、前記地絡検出手段は、モータ電流、前記モータの端子電圧、及び前記駆動回路に対する印加電圧を監視することにより、その地絡判定を実行するものであって、前記昇圧回路の異常が検出された場合には、前記昇圧を行なうことなく前記電源電圧を前記駆動回路に印加する非昇圧制御が実行されるモータ制御装置において、
前記モータが回生状態にあるか否かを判定する判定手段を備え、
前記地絡検出手段は、前記非昇圧制御時において、前記モータが回生状態にある場合には、前記地絡が発生した旨の判定を行なわないこと、を特徴とするモータ制御装置。
【請求項2】
請求項1に記載のモータ制御装置において、
前記昇圧回路の異常が検出された場合には、前記昇圧回路を構成する半導体素子の寄生ダイオードを介して前記電源電圧が前記駆動回路に印加されるものであって、
前記判定手段は、前記非昇圧制御時において、前記印加電圧が前記電源電圧を上回る場合に、前記回生状態にあると判定すること、を特徴とするモータ制御装置。
【請求項3】
請求項1又は請求項2の何れか一項に記載のモータ制御装置を備えた電動パワーステアリング装置。
【請求項1】
印加電圧に基づく駆動電力を生成してモータに出力する駆動回路と、電源電圧を昇圧して前記駆動回路に印加する昇圧回路と、前記昇圧回路の異常を検出する異常検出手段と、前記モータと前記駆動回路とを接続するモータ線に生じた地絡を検出する地絡検出手段とを備え、前記地絡検出手段は、モータ電流、前記モータの端子電圧、及び前記駆動回路に対する印加電圧を監視することにより、その地絡判定を実行するものであって、前記昇圧回路の異常が検出された場合には、前記昇圧を行なうことなく前記電源電圧を前記駆動回路に印加する非昇圧制御が実行されるモータ制御装置において、
前記モータが回生状態にあるか否かを判定する判定手段を備え、
前記地絡検出手段は、前記非昇圧制御時において、前記モータが回生状態にある場合には、前記地絡が発生した旨の判定を行なわないこと、を特徴とするモータ制御装置。
【請求項2】
請求項1に記載のモータ制御装置において、
前記昇圧回路の異常が検出された場合には、前記昇圧回路を構成する半導体素子の寄生ダイオードを介して前記電源電圧が前記駆動回路に印加されるものであって、
前記判定手段は、前記非昇圧制御時において、前記印加電圧が前記電源電圧を上回る場合に、前記回生状態にあると判定すること、を特徴とするモータ制御装置。
【請求項3】
請求項1又は請求項2の何れか一項に記載のモータ制御装置を備えた電動パワーステアリング装置。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−63236(P2010−63236A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−224884(P2008−224884)
【出願日】平成20年9月2日(2008.9.2)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月2日(2008.9.2)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
[ Back to top ]