
モータ回転数予測装置
【課題】本発明は、モータに対する通電停止時のロータの回転数を高精度に予測する。
【解決手段】
本発明のモータ回転数予測装置1は、誘導起電圧を検出する誘導起電圧検出部41と、誘導起電圧検出部41の検出結果に基づき、惰性により回転するロータ22の一回転にかかる時間を複数計測する時間計測部42と、時間計測部42の計測結果に基づき、時間計測部42の計測時におけるロータ22の平均回転数を算出する平均回転数算出部43と、モータ2の通電停止時から、平均回転数算出部43の算出したロータ22の平均回転数に到達するまでの時間を算出する到達時間算出部44と、プログラムされたラグランジュ補間公式を有し、平均回転数算出部43の算出結果と到達時間算出部44の算出結果とをラグランジュ補間公式に入力して、通電停止時のロータ22の回転数を予測する回転数予測部45と、を備える。
【解決手段】
本発明のモータ回転数予測装置1は、誘導起電圧を検出する誘導起電圧検出部41と、誘導起電圧検出部41の検出結果に基づき、惰性により回転するロータ22の一回転にかかる時間を複数計測する時間計測部42と、時間計測部42の計測結果に基づき、時間計測部42の計測時におけるロータ22の平均回転数を算出する平均回転数算出部43と、モータ2の通電停止時から、平均回転数算出部43の算出したロータ22の平均回転数に到達するまでの時間を算出する到達時間算出部44と、プログラムされたラグランジュ補間公式を有し、平均回転数算出部43の算出結果と到達時間算出部44の算出結果とをラグランジュ補間公式に入力して、通電停止時のロータ22の回転数を予測する回転数予測部45と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータに対する通電停止後にロータの惰性による回転によって生じる誘導起電圧から通電停止時のロータの回転数を予測するモータ回転数予測装置に関する。
【背景技術】
【0002】
従来、このような分野の技術として、特開平7―163795号公報がある。この公報に記載されたモータ制御装置は、モータに対する通電停止後にロータの惰性による回転から生じる誘導起電圧を検出する電圧検出手段と、電圧検出手段による検出結果からロータの回転数を算出する演算手段と、を備え、この演算手段では、電圧検出手段が検出した誘導起電圧の時間変化をパルス波として成形し、通電停止後の所定時間内におけるパルス波の幅、すなわちロータが所定の角度(例えば、二極三相のモータでは60度)回転するのにかかる時間からロータの回転数を算出している。
【特許文献1】特開平7―163795号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前述した従来のモータ制御装置においては、通電停止後のロータの回転数は時間の経過に伴って減少するため、演算手段が算出するロータの回転数は通電停止時のロータの回転数より低い値となってしまう。また、例えば二極三相のモータにおいて、製造誤差などによりロータが偏心していたりコイルやマグネットの位置がずれていたりすると、ロータが60度回転するごとに誘導起電圧の波形の形状が変わるため、通電停止のタイミングによって計測される波形の幅が変化してしまう。その結果、所定時間内におけるロータの回転角度の検出精度、すなわちロータの回転数の検出精度が低くなるという問題があった。
【0004】
本発明は、モータに対する通電停止時のロータの回転数を高精度に予測するモータ回転数予測装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、通電時にロータが回転するモータに対して通電を停止した後、惰性によるロータの回転によって生じる誘導起電圧から通電停止時のロータの回転数を予測するモータ回転数予測装置において、誘導起電圧を検出する誘導起電圧検出手段と、誘導起電圧検出手段の検出結果に基づき、惰性により回転するロータの一回転にかかる時間を複数計測する時間計測手段と、時間計測手段の計測結果に基づき、時間計測手段の計測時におけるロータの平均回転数を算出する平均回転数算出手段と、モータの通電停止時から、平均回転数算出手段の算出したロータの平均回転数に到達するまでの時間を算出する平均回転数到達時間の算出手段と、プログラムされたラグランジュ補間公式を有し、平均回転数算出手段の算出結果と平均回転数到達時間の算出手段の算出結果とをラグランジュ補間公式に入力して、通電停止時のロータの回転数を予測する回転数予測手段と、を備えることを特徴とする。
【0006】
このモータ回転数予測装置では、モータに対する通電停止後の誘導起電圧の検出結果に基づき、ロータの一回転にかかる時間を複数計測する。そして、複数の計測結果から各計測時におけるロータの平均回転数を算出する。また、モータの通電停止時から、惰性により回転するロータの回転数が算出したロータの平均回転数に到達するまでの時間を算出する。その後、算出した複数のロータの平均回転数と、これらのロータの平均回転数に到達するまでの時間と、をプログラムされたラグランジュ補間公式内に入力して、到達するまでの時間が0の場合のロータの回転数すなわち通電停止時におけるロータの回転数の予測を実現することができる。また、ロータの一回転あたりの誘導起電圧の波形の形状は、ロータが偏心している場合などにおいても一定であるため、誘導起電圧の検出結果からロータの一回転にかかる時間を計測することにより、計測結果にロータの偏心などの影響が現れないので、通電停止時のロータの回転数を高精度に予測することができる。例えば、この予測結果を用いて、モータの回転性能の検査に利用することができる。
【0007】
また、時間計測手段による複数の計測は、連続していることが好ましい。この場合、複数の計測間に時間差がある場合と比べて、ロータの回転数の予測にかかる時間が短縮されると共に、時間計測手段における演算処理量の軽減が図られる。
【0008】
あるいは、時間計測手段による複数の計測は、一部が重複していることが好ましい。この場合、より効果的にロータの回転数の予測にかかる時間の短縮が図られる。また、モータの仕様などにより、通電停止後の惰性によるロータの回転が2回転未満である場合においても、ロータの一回転にかかる時間を複数計測することができるので、ロータの回転数の予測が実現され、装置の汎用性の向上が図られる。
【発明の効果】
【0009】
本発明によれば、モータの通電停止時におけるロータの回転数を高精度に予測することができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照しつつ本発明に係るモータ回転数予測装置の好適な実施形態について詳細に説明する。
【0011】
[第1の実施形態]
図1及び図2に示すように、モータ回転数予測装置1は、例えば、製造後のモータ2の性能試験において、モータ2の回転性能を検査するために利用される。
【0012】
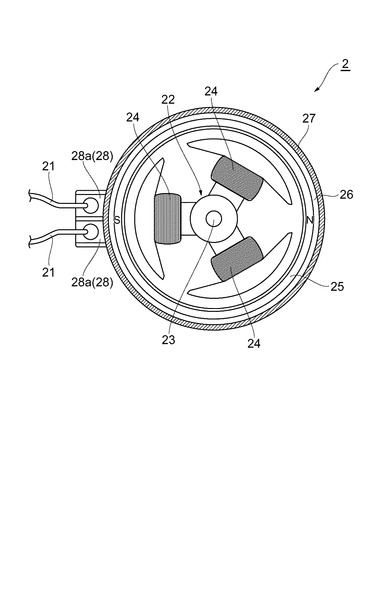
モータ回転数予測装置1に接続されるモータ2は、二極三相のコイン型モータであり、上下一対のカップ状部材からなるコイン型の筺体27を有している。筺体27には、3個のコイル24を有するロータ22と、一対のN極とS極とを有する円筒状のマグネット25と、が収容されている。
【0013】
ロータ22の中央には、筺体27に対して固定された回転軸としてのシャフト23が配置されている。ロータ22は、シャフト23の周方向で等間隔(120度毎)に突出する三本の足部を有している。これらの三本の足部には、シャフト23を中心とした同一円上でコイル24がそれぞれ巻き付けられており、足部はコイル24のコアとして機能する。
【0014】
マグネット25は、円筒形状をなしており、ロータ22を囲むように配置されている。マグネット25の外側面には、環状のヨーク26が固定されており、このヨーク26は、筺体27の内側面に固定されている。
【0015】
筺体27の周壁には、開口部が設けられ、この開口部からは、コイル24に電流を供給するブラシとして機能するブラシアッセンブリ28のランド部28aが突出している。ランド部28aには、ブラシアッセンブリ28に電流を供給するための2本の配線21が半田によって固定されている。
【0016】
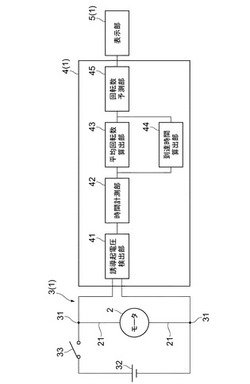
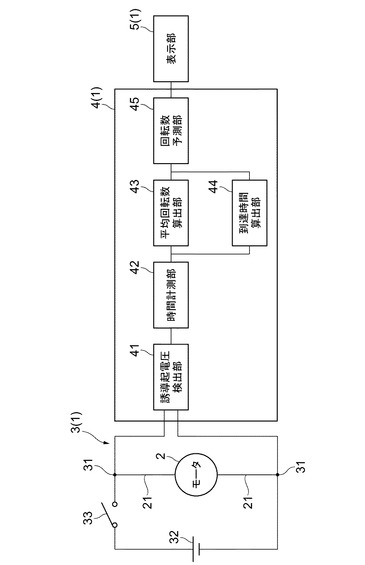
さらに、モータ回転数予測装置1は、モータ2の2本の配線21が接続されるモータ接続部3と、通電停止後のモータ2の誘導起電圧から通電停止時のロータ22の回転数を予測する演算部4と、演算部4の予測結果を表示する表示部5と、を備えている。
【0017】
モータ接続部3は、モータ2の2本の配線21がそれぞれ接続される配線接続部31と、モータ2に電流を供給するための電源32と、電源32によるモータ2への電流の供給と供給停止とを切り替える切り替えスイッチ33と、を有している。
【0018】
演算部4は、ROM[Read Only Memory]に記録されたプログラムをRAM[Random Access Memory]にロードして実行されるCPU[Central Processing Unit]であり、誘導起電圧検出部41と、時間計測部42と、平均回転数算出部43と、到達時間算出部44と、回転数予測部45とで構成されている。演算部4は、モータ接続部3及び表示部5と電気的に接続されている。
【0019】
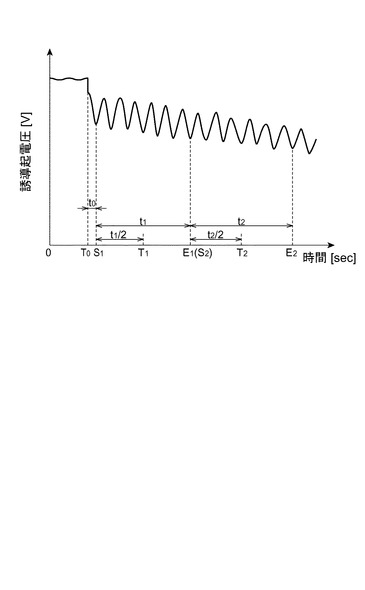
誘導起電圧検出部41は、モータ接続部3に接続されたモータ2に対する通電が停止されたことを検知する。誘導起電圧検出部41は、モータ2に対する通電停止後、惰性によるロータ22の回転によって生じる誘導起電圧の時間変化を検出する(図3参照)。誘導起電圧検出部41は、検出した誘導起電圧の時間変化をAD変換し、デジタル化した誘導起電圧の時間変化の波形を時間変化情報として時間計測部42に送信する。
【0020】
時間計測部42は、誘導起電圧検出部41から送信された時間変化情報に基づき、ロータ22の一回転にかかる時間を計測する。具体的には、時間計測部42は、モータ2に対する通電停止後、ロータ22の回転位置が所定の第1の基準位置となるまでの時間t0(図3のグラフにおいて、通電停止時点T0から、誘導起電圧の波形が谷部の頂点に最初に至るまでの時間)を計測する。そして、時間計測部42は、時間t0の終了時点、すなわちロータ22の回転位置が第1の基準位置となった時点を第1の計測開始時点S1として認識する。時間計測部42は、ロータ22が一回転することで生じる誘導起電圧の波形の山部の数が一定数(二極三相のモータ2においては6山)であることより、第1の計測開始時点S1から数えて誘導起電圧の波形の山部が6山となった時点を第1の計測終了時点E1として認識する。時間計測部42は、第1の計測開始時点S1と第1の計測終了時点E1とからロータ22の一回転にかかる時間t1を計測する。
【0021】
また、時間計測部42は、通電停止後、ロータ22が一回転して第1の基準位置に戻った時点(すなわち第1の計測終了時点E1)を第2の計測開始時点S2として認識する。そして、時間計測部42は、第2の計測開始時点S2から数えて誘導起電圧の波形の山部が6山となった時点を第2の計測終了時点E2として認識する。時間計測部42は、第2の計測開始時点S2と第2の計測終了時点E2とからロータ22が一回転して再び第1の基準位置に戻るまでの時間t2を計測する。時間計測部42は、計測した時間t1,t2を計測結果情報として平均回転数算出部43に送信する。また、時間計測部42は、計測した時間t0,t1,t2を計測結果情報として到達時間算出部44に送信する。
【0022】
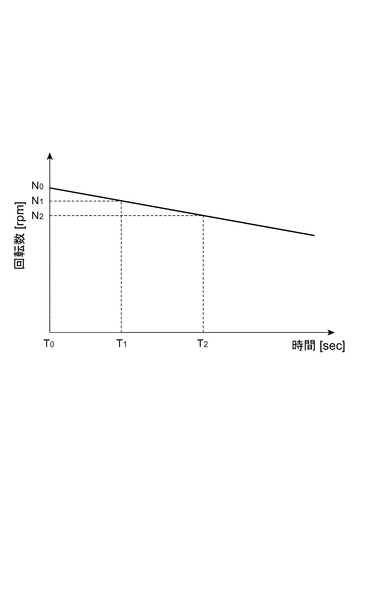
平均回転数算出部43は、時間計測部42から送信された計測結果情報に基づき、各計測時間におけるロータ22の平均回転数を算出する(図4参照)。平均回転数算出部43は、予めプログラムされた下記の式(1)に時間t1,t2を入力して、時間t1の計測時におけるロータ22の平均回転数N1と,時間t2の計測時におけるロータ22のN2とを算出する。なお、式(1)において、Nはロータの平均回転数、tは時間計測部42が計測したロータの一回転にかかる時間であり、nは自然数である。平均回転数算出部43は、算出したロータ22の平均回転数N1,N2を平均回転数情報として回転数予測部45に送信する。
【数1】

【0023】
到達時間算出部44は、時間計測部42から送信された計測結果情報に基づき、時間経過に伴って低下するロータ22の回転数が、平均回転数算出部43の算出する平均回転数に到達するまでの時間を算出する。具体的には、到達時間算出部44は、予めプログラムされた下記の式(2)に時間t0,t1,t2を入力して、ロータ22の回転数が平均回転数N1に到達するまでの時間T1と、ロータ22の回転数が平均回転数N2に到達するまでの時間T2とを算出する。なお、式(2)において、Tはロータの平均回転数に到達するまでの時間、tは時間計測部42が計測したロータの一回転にかかる時間であり、nは自然数である。到達時間算出部44は、算出した時間T1,T2を到達時間情報として回転数予測部45に送信する。
【数2】
【0024】
回転数予測部45は、平均回転数算出部43から送信された平均回転数情報と到達時間算出部44から送信された到達時間情報とに基づき、モータ2に対する通電停止時点T0におけるロータ22の回転数N0を予測する。回転数予測部45は、予めプログラムされたラグランジェ補間公式(3)にロータ22の平均回転数N1,N2と時間T1,T2とを入力して、通電停止時点T0におけるロータ22の回転数N0を予測する。なお、式(3)において、Tはロータの平均回転数に到達するまでの時間、Nはロータの平均回転数であり、nは自然数である。回転数予測部45は、予測した通電停止時点T0におけるロータ22の回転数N0を予測回転数情報として表示部5に送信する。
【数3】
【0025】
表示部5は、回転数予測部45から予測回転数情報を送信された場合、予測が終了したことを作業者に知らせるためにスピーカからシグナル音を発する。そして、表示部5は、ロータ22の回転数N0が正常な値の範囲内であれば、正常ランプを点灯させ、作業者は、製造後のモータ2の回転性能は正常であると判断する。
【0026】
以上の構成を有するモータ回転数予測装置1では、切り替えスイッチ33を切り替えて、モータ2に対する通電を停止した後、惰性によるロータ22の回転によって生じる誘導起電圧の検出結果に基づき、ロータ22の一回転にかかる時間t1,t2を計測する。そして、時間t1,t2から各計測時におけるロータ22の平均回転数N1,N2を算出する。また、モータ2の通電停止時から、惰性により回転するロータ22の回転数がロータ22の平均回転数N1,N2に到達するまでの時間T1,T2をそれぞれ算出する。その後、ロータ22の平均回転数N1,N2と時間T1,T2とをプログラムされたラグランジュ補間公式(3)内に入力して、到達するまでの時間が0の場合のロータ22の回転数すなわち通電停止時点T0におけるロータ22の回転数N0の予測を実現することができる。そして、この予測結果に基づき、モータ2の回転性能を検査することが可能となる。
【0027】
また、ロータ22の一回転あたりの誘導起電圧の波形の形状は、ロータ22が偏心している場合などにおいても一定であるため、誘導起電圧の検出結果からロータ22の一回転にかかる時間を計測することにより、計測結果にロータ22の偏心などの影響が現れないので、通電停止時点T0におけるロータ22の回転数N0を高精度に予測することができる。
【0028】
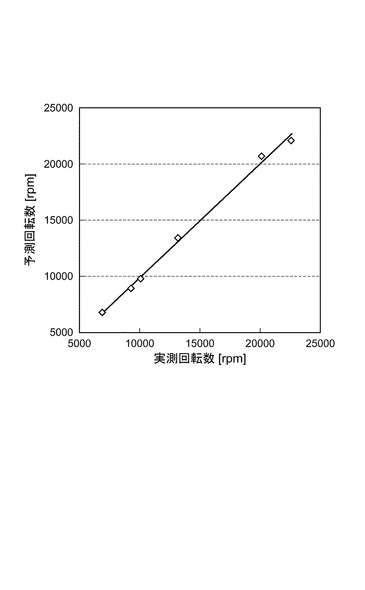
図5は、このモータ回転数予測装置1により予測された通電停止時のロータの回転数と実測されたロータの回転数とを示す図である。この試験では、二極三相のモータを採用し、光学式のロータリエンコーダによりモータに負荷がかからない状態で実測を行った。そして、実測結果とモータ回転数予測装置1による予測結果を点で表し、これらの相関直線を引いた。その結果、相関係数は99.8%であり、通電停止時のロータの回転数を高精度に予測することができた。
【0029】
また、このモータ回転数予測装置1では、時間計測部42による時間t1,t2の計測が連続して行われているため、各計測間に時間差がある場合と比べて、ロータ22の回転数の予測にかかる時間が短縮されると共に、時間計測部42における演算処理量の軽減が図られる。
【0030】
[第2の実施形態]
第2の実施形態に係るモータ回転数予測装置1は、第1の実施形態と比較して、誘導起電圧検出手段41が誘導起電圧の時間変化の波形を正規化する点と、時間計測部42における時間t1の計測と時間t2の計測とが重複している点と、到達時間算出部44における時間T1,T2の算出に用いる数式と、が相違している。以下、第1の実施形態と構成が異なる演算部4について説明を行い、第1の実施形態と同一の構成を有するモータ2、モータ接続部3、表示部5については、その説明を省略する。
【0031】
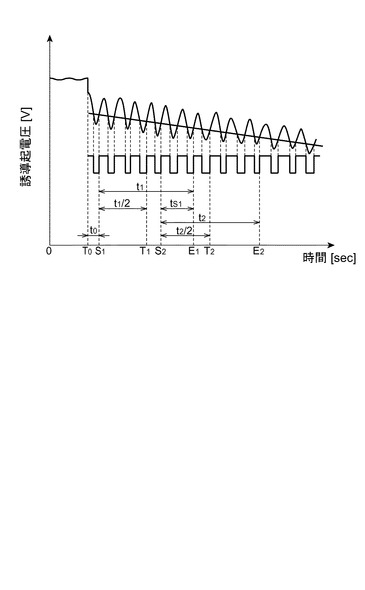
図1、図6及び図7に示すように、第2の実施形態における誘導起電圧検出部41は、モータ2に対する通電停止後のロータ22の惰性による回転によって生じる誘導起電圧の時間変化の波形を検出し、その波形を正規化すなわちパルス波に成形する。誘導起電圧検出部41は、正規化した誘導起電圧の時間変化の波形をパルス波情報として時間計測部42に送信する。このように、誘導起電圧の時間変化の波形を正規化することで、時間計測部42における演算処理量の軽減が図られる。
【0032】
時間計測部42は、誘導起電圧検出部41から送信された誘導起電圧のパルス波情報に基づき、ロータ22の一回転にかかる時間を計測する。具体的には、時間計測部42は、通電停止後、ロータ22の回転位置が所定の第1の基準位置となるまでの時間t0(図6のグラフにおいて、通電停止時点T0から、最初に誘導起電圧のパルス波が谷部から山部に切り換わるまでの時間)を計測する。そして、時間計測部42は、時間t0の終了時点、すなわちロータ22の回転位置が第1の基準位置となった時点を第1の計測開始時点S1として認識する。
【0033】
更に、時間計測部42は、ロータ22が第1の基準位置から240度回転した位置を第2の基準位置とし、第1の計測開始時点S1の後において最初にロータ22が第2の基準位置となった時点(図6のグラフにおいて、第1の計測開始時点S1後、パルス波の谷部から山部への切換えが4回行われた時点)を第1の計測開始時点S2として認識する。
【0034】
時間計測部42は、ロータ22が一回転することで生じる誘導起電圧のパルス波の谷部から山部への切換えの数が一定数(二極三相のモータ2においては6回)であることから、第1の計測開始時点S1から数えてパルス波の谷部から山部への切換えが6回行われた時点を第1の計測終了時点E1として認識する。時間計測部42は、第1の計測開始時点S1と第1の計測終了時点E1とからロータ22の一回転にかかる時間t1を計測する。
【0035】
また、時間計測部42は、第2の計測開始時点S2から数えてパルス波の谷部から山部への切換えが6回行われた時点を第2の計測終了時点E2として認識する。時間計測部42は、第2の計測開始時点S2と第2の計測終了時点E2とからロータ22の一回転にかかる時間t2を計測する。
【0036】
また、時間計測部42は、時間t1と時間t2との重複時間ts1(すなわち第2の計測開始時点S2と第1の計測終了時点E1との間の時間)を計測する。時間計測部42は、計測した時間t1,t2を計測結果情報として平均回転数算出部43に送信する。また、時間計測部42は、計測した時間t0,t1,t2,ts1を計測結果情報として到達時間算出部44に送信する。
【0037】
平均回転数算出部43は、時間計測部42から送信された計測結果情報に基づき、各計測時間におけるロータ22の平均回転数を算出する。平均回転数算出部43は、予めプログラムされた式(1)に時間t1,t2を入力して、時間t1の計測時におけるロータ22の平均回転数N1と,時間t2の計測時におけるロータ22のN2とを算出する。平均回転数算出部43は、算出したロータ22の平均回転数N1,N2を平均回転数情報として回転数予測部45に送信する。
【0038】
到達時間算出部44は、時間計測部42から送信された計測結果情報に基づき、惰性により回転するロータ22の回転数が平均回転数算出部43の算出する平均回転数に到達するまでの時間を算出する。具体的には、到達時間算出部44は、予めプログラムされた式(4)に時間t0,t1,t2,ts1を入力して、ロータ22の回転数が平均回転数N1に到達するまでの時間T1と、ロータ22の回転数が平均回転数N2に到達するまでの時間T2とを算出する。なお、式(4)において、Tはロータの平均回転数に到達するまでの時間、tは時間計測部42が計測したロータの一回転にかかる時間であり、nは自然数である。到達時間算出部44は、算出した時間T1,T2を到達時間情報として回転数予測部45に送信する。
【数4】
【0039】
回転数予測部45は、平均回転数算出部43から送信された平均回転数情報と到達時間算出部44から送信された到達時間情報とに基づき、モータ2に対する通電停止時点T0におけるロータ22の回転数N0を予測する。回転数予測部45は、予めプログラムされたラグランジェ補間公式(3)にロータ22の平均回転数N1,N2と時間T1,T2とを入力して、通電停止時点T0におけるロータ22の回転数N0を予測する。回転数予測部45は、予測した通電停止時点T0におけるロータ22の回転数N0を予測回転数情報として表示部5に送信する。
【0040】
以上の構成を有するモータ回転数予測装置1では、時間計測部42における時間t1の計測の一部と時間t2の計測の一部とが重複しているため、連続して計測する場合と比べて、効果的にロータ22の回転数の予測にかかる時間の短縮が図られる。また、モータの仕様などにより、通電停止後の惰性によるロータの回転が2回転未満である場合においても、ロータの一回転にかかる時間を複数計測することができるので、ロータの回転数の予測が実現され、モータ回転数予測装置1の汎用性の向上が図られる。
【0041】
[第3の実施形態]
第3の実施形態に係るモータ回転数予測装置1は、第1の実施形態と比較して、時間計測部42がロータ22の一回転にかかる時間を3回計測している点が相違している。以下、第1の実施形態と構成が異なる演算部4について説明を行い、第1の実施形態と同一の構成を有するモータ2、モータ接続部3、表示部5については、その説明を省略する。
【0042】
図1、図8及び図9に示すように、第3の実施形態における時間計測部42は、誘導起電圧検出部41から送信された誘導起電圧の時間変化情報に基づき、ロータ22の一回転にかかる時間を計測する。
【0043】
誘導起電圧検出部41は、モータ接続部3に接続されたモータ2に対する通電が停止されたことを検知する。誘導起電圧検出部41は、モータ2に対する通電停止後、惰性によるロータ22の回転によって生じる誘導起電圧の時間変化を検出する。誘導起電圧検出部41は、検出した誘導起電圧の時間変化をAD変換し、デジタル化した誘導起電圧の時間変化の波形を時間変化情報として時間計測部42に送信する。
【0044】
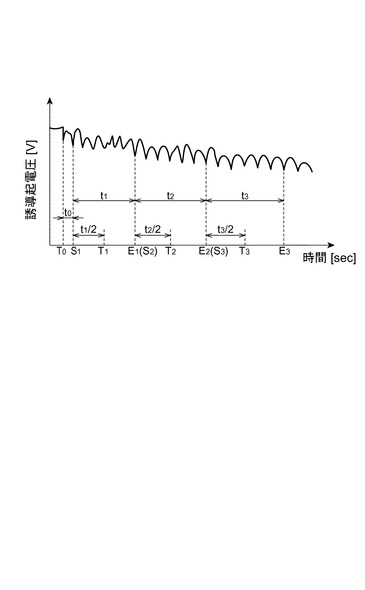
時間計測部42は、誘導起電圧検出部41から送信された誘導起電圧の時間変化情報に基づき、ロータ22の一回転にかかる時間を計測する。具体的には、時間計測部42は、通電停止後、ロータ22の回転位置が所定の第1の基準位置となるまでの時間t0(図8のグラフにおいて通電停止時点T0から誘導起電圧のパルス波が谷部から山部に切り換わるまでの時間)を計測する。そして、時間計測部42は、時間t0の終了時点、すなわちロータ22の回転位置が第1の基準位置となった時点を第1の計測開始時点S1として認識する。時間計測部42は、第1の計測開始時点S1から数えて誘導起電圧の波形の山部が6山となった時点を第1の計測終了時点E1として認識する。時間計測部42は、第1の計測開始時点S1と第1の計測終了時点E1とからロータ22の一回転にかかる時間t1を計測する。
【0045】
また、時間計測部42は、通電停止後、ロータ22が一回転して第1の基準位置に戻った時点(すなわち第1の計測終了時点E1)を第2の計測開始時点S2として認識する。時間計測部42は、第2の計測開始時点S2から誘導起電圧の波形の山部が6山となった時点を第2の計測終了時点E2として認識し、第2の計測開始時点S2と第2の計測終了時点E2とからロータ22が一回転して再び第1の基準位置に戻るまでの時間t2を計測する。同様に、時間計測部42は、通電停止後、ロータ22が二回転して第1の基準位置に戻った時点(すなわち第2の計測終了時点E2)を第3の計測開始時点S3として認識する。時間計測部42は、第3の計測開始時点S3から数えて誘導起電圧の波形の山部が6山となった時点を第3の計測終了時点E3として認識し、第3の計測開始時点S3と第3の計測終了時点E3とからロータ22が一回転して第1の基準位置に戻るまでの時間t3を計測する。時間計測部42は、計測した時間t1,t2,t3を計測結果情報として平均回転数算出部43に送信する。また、時間計測部42は、計測した時間t0,t1,t2,t3を計測結果情報として到達時間算出部44に送信する。
【0046】
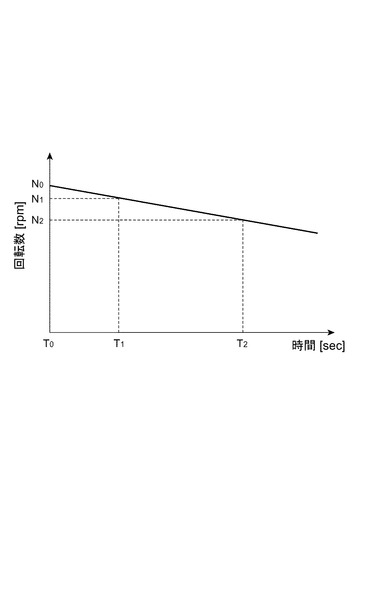
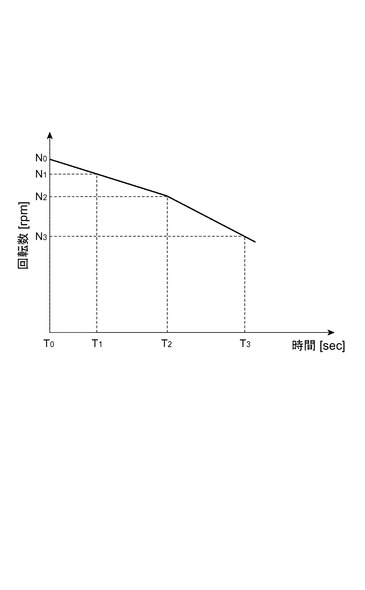
平均回転数算出部43は、時間計測部42から送信された時間t1,t2,t3を式(1)に入力して、各計測時におけるロータ22の平均回転数N1,N2,N3を算出する。平均回転数算出部43は、算出した平均回転数N1,N2,N3を平均回転数情報として回転数予測部45に送信する。
【0047】
到達時間算出部44は、時間計測部42から送信された時間t0,t1,t2,t3を式(2)に入力して、モータ2の通電停止時から、惰性により回転するロータ22の回転数がロータ22の平均回転数N1,N2,N3に到達するまでの時間T1,T2,T3を算出する。到達時間算出部44は、算出した時間T1,T2,T3を到達時間情報として回転数予測部45に送信する。
【0048】
回転数予測部45は、平均回転数算出部43から送信された平均回転数情報と到達時間算出部44から送信された到達時間情報とに基づき、ラグランジェ補間公式(3)にロータ22の平均回転数N1,N2,N3と時間T1,T2,T3とを入力して、通電停止時点T0におけるロータ22の回転数N0を予測する。回転数予測部45は、予測した通電停止時点T0におけるロータ22の回転数N0を表示部5に送信する。
【0049】
以上の構成を有するモータ回転数予測装置1では、ロータ22の一回転にかかる時間を3回計測しているので、ロータ22の一回転にかかる時間を2回計測する場合と比べて、通電停止時点T0におけるロータ22の回転数N0をより高精度に予測することが可能になる。
【0050】
本発明は、前述した実施形態に限定されないことは言うまでもない。例えば、時間計測部42によるロータ2の一回転にかかる時間の計測は、各計測間に時間差があってもよいのはもちろんである。また、計測回数は、3回以上であってもよく、3回以上計測する場合において、各計測の一部が重複する態様であってもよい。また、装置に適用されるモータは、二極三相のものに限られない。
【図面の簡単な説明】
【0051】
【図1】本発明に係るモータ回転数予測装置の構成を示すブロック図である。
【図2】図1に示したモータの断面図である。
【図3】通電停止後の誘導起電圧を示すグラフである。
【図4】通電停止後のロータの予測回転数を示すグラフである。
【図5】ロータの予測回転数と実測回転数の相関を示すグラフである。
【図6】第2の実施形態における通電停止後の誘導起電圧を示すグラフである。
【図7】第2の実施形態における通電停止後のロータの予測回転数を示すグラフである。
【図8】第3の実施形態における通電停止後の誘導起電圧を示すグラフである。
【図9】第3の実施形態における通電停止後のロータの予測回転数を示すグラフである。
【符号の説明】
【0052】
1…モータ回転数予測装置、2…モータ、3…モータ接続部、4…演算部、22…ロータ、24…コイル、25…マグネット、41…誘導起電圧検出部、42…時間計測部、43…平均回転数算出部、44…到達時間算出部、45…回転数予測部。
【技術分野】
【0001】
本発明は、モータに対する通電停止後にロータの惰性による回転によって生じる誘導起電圧から通電停止時のロータの回転数を予測するモータ回転数予測装置に関する。
【背景技術】
【0002】
従来、このような分野の技術として、特開平7―163795号公報がある。この公報に記載されたモータ制御装置は、モータに対する通電停止後にロータの惰性による回転から生じる誘導起電圧を検出する電圧検出手段と、電圧検出手段による検出結果からロータの回転数を算出する演算手段と、を備え、この演算手段では、電圧検出手段が検出した誘導起電圧の時間変化をパルス波として成形し、通電停止後の所定時間内におけるパルス波の幅、すなわちロータが所定の角度(例えば、二極三相のモータでは60度)回転するのにかかる時間からロータの回転数を算出している。
【特許文献1】特開平7―163795号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前述した従来のモータ制御装置においては、通電停止後のロータの回転数は時間の経過に伴って減少するため、演算手段が算出するロータの回転数は通電停止時のロータの回転数より低い値となってしまう。また、例えば二極三相のモータにおいて、製造誤差などによりロータが偏心していたりコイルやマグネットの位置がずれていたりすると、ロータが60度回転するごとに誘導起電圧の波形の形状が変わるため、通電停止のタイミングによって計測される波形の幅が変化してしまう。その結果、所定時間内におけるロータの回転角度の検出精度、すなわちロータの回転数の検出精度が低くなるという問題があった。
【0004】
本発明は、モータに対する通電停止時のロータの回転数を高精度に予測するモータ回転数予測装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、通電時にロータが回転するモータに対して通電を停止した後、惰性によるロータの回転によって生じる誘導起電圧から通電停止時のロータの回転数を予測するモータ回転数予測装置において、誘導起電圧を検出する誘導起電圧検出手段と、誘導起電圧検出手段の検出結果に基づき、惰性により回転するロータの一回転にかかる時間を複数計測する時間計測手段と、時間計測手段の計測結果に基づき、時間計測手段の計測時におけるロータの平均回転数を算出する平均回転数算出手段と、モータの通電停止時から、平均回転数算出手段の算出したロータの平均回転数に到達するまでの時間を算出する平均回転数到達時間の算出手段と、プログラムされたラグランジュ補間公式を有し、平均回転数算出手段の算出結果と平均回転数到達時間の算出手段の算出結果とをラグランジュ補間公式に入力して、通電停止時のロータの回転数を予測する回転数予測手段と、を備えることを特徴とする。
【0006】
このモータ回転数予測装置では、モータに対する通電停止後の誘導起電圧の検出結果に基づき、ロータの一回転にかかる時間を複数計測する。そして、複数の計測結果から各計測時におけるロータの平均回転数を算出する。また、モータの通電停止時から、惰性により回転するロータの回転数が算出したロータの平均回転数に到達するまでの時間を算出する。その後、算出した複数のロータの平均回転数と、これらのロータの平均回転数に到達するまでの時間と、をプログラムされたラグランジュ補間公式内に入力して、到達するまでの時間が0の場合のロータの回転数すなわち通電停止時におけるロータの回転数の予測を実現することができる。また、ロータの一回転あたりの誘導起電圧の波形の形状は、ロータが偏心している場合などにおいても一定であるため、誘導起電圧の検出結果からロータの一回転にかかる時間を計測することにより、計測結果にロータの偏心などの影響が現れないので、通電停止時のロータの回転数を高精度に予測することができる。例えば、この予測結果を用いて、モータの回転性能の検査に利用することができる。
【0007】
また、時間計測手段による複数の計測は、連続していることが好ましい。この場合、複数の計測間に時間差がある場合と比べて、ロータの回転数の予測にかかる時間が短縮されると共に、時間計測手段における演算処理量の軽減が図られる。
【0008】
あるいは、時間計測手段による複数の計測は、一部が重複していることが好ましい。この場合、より効果的にロータの回転数の予測にかかる時間の短縮が図られる。また、モータの仕様などにより、通電停止後の惰性によるロータの回転が2回転未満である場合においても、ロータの一回転にかかる時間を複数計測することができるので、ロータの回転数の予測が実現され、装置の汎用性の向上が図られる。
【発明の効果】
【0009】
本発明によれば、モータの通電停止時におけるロータの回転数を高精度に予測することができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照しつつ本発明に係るモータ回転数予測装置の好適な実施形態について詳細に説明する。
【0011】
[第1の実施形態]
図1及び図2に示すように、モータ回転数予測装置1は、例えば、製造後のモータ2の性能試験において、モータ2の回転性能を検査するために利用される。
【0012】
モータ回転数予測装置1に接続されるモータ2は、二極三相のコイン型モータであり、上下一対のカップ状部材からなるコイン型の筺体27を有している。筺体27には、3個のコイル24を有するロータ22と、一対のN極とS極とを有する円筒状のマグネット25と、が収容されている。
【0013】
ロータ22の中央には、筺体27に対して固定された回転軸としてのシャフト23が配置されている。ロータ22は、シャフト23の周方向で等間隔(120度毎)に突出する三本の足部を有している。これらの三本の足部には、シャフト23を中心とした同一円上でコイル24がそれぞれ巻き付けられており、足部はコイル24のコアとして機能する。
【0014】
マグネット25は、円筒形状をなしており、ロータ22を囲むように配置されている。マグネット25の外側面には、環状のヨーク26が固定されており、このヨーク26は、筺体27の内側面に固定されている。
【0015】
筺体27の周壁には、開口部が設けられ、この開口部からは、コイル24に電流を供給するブラシとして機能するブラシアッセンブリ28のランド部28aが突出している。ランド部28aには、ブラシアッセンブリ28に電流を供給するための2本の配線21が半田によって固定されている。
【0016】
さらに、モータ回転数予測装置1は、モータ2の2本の配線21が接続されるモータ接続部3と、通電停止後のモータ2の誘導起電圧から通電停止時のロータ22の回転数を予測する演算部4と、演算部4の予測結果を表示する表示部5と、を備えている。
【0017】
モータ接続部3は、モータ2の2本の配線21がそれぞれ接続される配線接続部31と、モータ2に電流を供給するための電源32と、電源32によるモータ2への電流の供給と供給停止とを切り替える切り替えスイッチ33と、を有している。
【0018】
演算部4は、ROM[Read Only Memory]に記録されたプログラムをRAM[Random Access Memory]にロードして実行されるCPU[Central Processing Unit]であり、誘導起電圧検出部41と、時間計測部42と、平均回転数算出部43と、到達時間算出部44と、回転数予測部45とで構成されている。演算部4は、モータ接続部3及び表示部5と電気的に接続されている。
【0019】
誘導起電圧検出部41は、モータ接続部3に接続されたモータ2に対する通電が停止されたことを検知する。誘導起電圧検出部41は、モータ2に対する通電停止後、惰性によるロータ22の回転によって生じる誘導起電圧の時間変化を検出する(図3参照)。誘導起電圧検出部41は、検出した誘導起電圧の時間変化をAD変換し、デジタル化した誘導起電圧の時間変化の波形を時間変化情報として時間計測部42に送信する。
【0020】
時間計測部42は、誘導起電圧検出部41から送信された時間変化情報に基づき、ロータ22の一回転にかかる時間を計測する。具体的には、時間計測部42は、モータ2に対する通電停止後、ロータ22の回転位置が所定の第1の基準位置となるまでの時間t0(図3のグラフにおいて、通電停止時点T0から、誘導起電圧の波形が谷部の頂点に最初に至るまでの時間)を計測する。そして、時間計測部42は、時間t0の終了時点、すなわちロータ22の回転位置が第1の基準位置となった時点を第1の計測開始時点S1として認識する。時間計測部42は、ロータ22が一回転することで生じる誘導起電圧の波形の山部の数が一定数(二極三相のモータ2においては6山)であることより、第1の計測開始時点S1から数えて誘導起電圧の波形の山部が6山となった時点を第1の計測終了時点E1として認識する。時間計測部42は、第1の計測開始時点S1と第1の計測終了時点E1とからロータ22の一回転にかかる時間t1を計測する。
【0021】
また、時間計測部42は、通電停止後、ロータ22が一回転して第1の基準位置に戻った時点(すなわち第1の計測終了時点E1)を第2の計測開始時点S2として認識する。そして、時間計測部42は、第2の計測開始時点S2から数えて誘導起電圧の波形の山部が6山となった時点を第2の計測終了時点E2として認識する。時間計測部42は、第2の計測開始時点S2と第2の計測終了時点E2とからロータ22が一回転して再び第1の基準位置に戻るまでの時間t2を計測する。時間計測部42は、計測した時間t1,t2を計測結果情報として平均回転数算出部43に送信する。また、時間計測部42は、計測した時間t0,t1,t2を計測結果情報として到達時間算出部44に送信する。
【0022】
平均回転数算出部43は、時間計測部42から送信された計測結果情報に基づき、各計測時間におけるロータ22の平均回転数を算出する(図4参照)。平均回転数算出部43は、予めプログラムされた下記の式(1)に時間t1,t2を入力して、時間t1の計測時におけるロータ22の平均回転数N1と,時間t2の計測時におけるロータ22のN2とを算出する。なお、式(1)において、Nはロータの平均回転数、tは時間計測部42が計測したロータの一回転にかかる時間であり、nは自然数である。平均回転数算出部43は、算出したロータ22の平均回転数N1,N2を平均回転数情報として回転数予測部45に送信する。
【数1】
【0023】
到達時間算出部44は、時間計測部42から送信された計測結果情報に基づき、時間経過に伴って低下するロータ22の回転数が、平均回転数算出部43の算出する平均回転数に到達するまでの時間を算出する。具体的には、到達時間算出部44は、予めプログラムされた下記の式(2)に時間t0,t1,t2を入力して、ロータ22の回転数が平均回転数N1に到達するまでの時間T1と、ロータ22の回転数が平均回転数N2に到達するまでの時間T2とを算出する。なお、式(2)において、Tはロータの平均回転数に到達するまでの時間、tは時間計測部42が計測したロータの一回転にかかる時間であり、nは自然数である。到達時間算出部44は、算出した時間T1,T2を到達時間情報として回転数予測部45に送信する。
【数2】
【0024】
回転数予測部45は、平均回転数算出部43から送信された平均回転数情報と到達時間算出部44から送信された到達時間情報とに基づき、モータ2に対する通電停止時点T0におけるロータ22の回転数N0を予測する。回転数予測部45は、予めプログラムされたラグランジェ補間公式(3)にロータ22の平均回転数N1,N2と時間T1,T2とを入力して、通電停止時点T0におけるロータ22の回転数N0を予測する。なお、式(3)において、Tはロータの平均回転数に到達するまでの時間、Nはロータの平均回転数であり、nは自然数である。回転数予測部45は、予測した通電停止時点T0におけるロータ22の回転数N0を予測回転数情報として表示部5に送信する。
【数3】
【0025】
表示部5は、回転数予測部45から予測回転数情報を送信された場合、予測が終了したことを作業者に知らせるためにスピーカからシグナル音を発する。そして、表示部5は、ロータ22の回転数N0が正常な値の範囲内であれば、正常ランプを点灯させ、作業者は、製造後のモータ2の回転性能は正常であると判断する。
【0026】
以上の構成を有するモータ回転数予測装置1では、切り替えスイッチ33を切り替えて、モータ2に対する通電を停止した後、惰性によるロータ22の回転によって生じる誘導起電圧の検出結果に基づき、ロータ22の一回転にかかる時間t1,t2を計測する。そして、時間t1,t2から各計測時におけるロータ22の平均回転数N1,N2を算出する。また、モータ2の通電停止時から、惰性により回転するロータ22の回転数がロータ22の平均回転数N1,N2に到達するまでの時間T1,T2をそれぞれ算出する。その後、ロータ22の平均回転数N1,N2と時間T1,T2とをプログラムされたラグランジュ補間公式(3)内に入力して、到達するまでの時間が0の場合のロータ22の回転数すなわち通電停止時点T0におけるロータ22の回転数N0の予測を実現することができる。そして、この予測結果に基づき、モータ2の回転性能を検査することが可能となる。
【0027】
また、ロータ22の一回転あたりの誘導起電圧の波形の形状は、ロータ22が偏心している場合などにおいても一定であるため、誘導起電圧の検出結果からロータ22の一回転にかかる時間を計測することにより、計測結果にロータ22の偏心などの影響が現れないので、通電停止時点T0におけるロータ22の回転数N0を高精度に予測することができる。
【0028】
図5は、このモータ回転数予測装置1により予測された通電停止時のロータの回転数と実測されたロータの回転数とを示す図である。この試験では、二極三相のモータを採用し、光学式のロータリエンコーダによりモータに負荷がかからない状態で実測を行った。そして、実測結果とモータ回転数予測装置1による予測結果を点で表し、これらの相関直線を引いた。その結果、相関係数は99.8%であり、通電停止時のロータの回転数を高精度に予測することができた。
【0029】
また、このモータ回転数予測装置1では、時間計測部42による時間t1,t2の計測が連続して行われているため、各計測間に時間差がある場合と比べて、ロータ22の回転数の予測にかかる時間が短縮されると共に、時間計測部42における演算処理量の軽減が図られる。
【0030】
[第2の実施形態]
第2の実施形態に係るモータ回転数予測装置1は、第1の実施形態と比較して、誘導起電圧検出手段41が誘導起電圧の時間変化の波形を正規化する点と、時間計測部42における時間t1の計測と時間t2の計測とが重複している点と、到達時間算出部44における時間T1,T2の算出に用いる数式と、が相違している。以下、第1の実施形態と構成が異なる演算部4について説明を行い、第1の実施形態と同一の構成を有するモータ2、モータ接続部3、表示部5については、その説明を省略する。
【0031】
図1、図6及び図7に示すように、第2の実施形態における誘導起電圧検出部41は、モータ2に対する通電停止後のロータ22の惰性による回転によって生じる誘導起電圧の時間変化の波形を検出し、その波形を正規化すなわちパルス波に成形する。誘導起電圧検出部41は、正規化した誘導起電圧の時間変化の波形をパルス波情報として時間計測部42に送信する。このように、誘導起電圧の時間変化の波形を正規化することで、時間計測部42における演算処理量の軽減が図られる。
【0032】
時間計測部42は、誘導起電圧検出部41から送信された誘導起電圧のパルス波情報に基づき、ロータ22の一回転にかかる時間を計測する。具体的には、時間計測部42は、通電停止後、ロータ22の回転位置が所定の第1の基準位置となるまでの時間t0(図6のグラフにおいて、通電停止時点T0から、最初に誘導起電圧のパルス波が谷部から山部に切り換わるまでの時間)を計測する。そして、時間計測部42は、時間t0の終了時点、すなわちロータ22の回転位置が第1の基準位置となった時点を第1の計測開始時点S1として認識する。
【0033】
更に、時間計測部42は、ロータ22が第1の基準位置から240度回転した位置を第2の基準位置とし、第1の計測開始時点S1の後において最初にロータ22が第2の基準位置となった時点(図6のグラフにおいて、第1の計測開始時点S1後、パルス波の谷部から山部への切換えが4回行われた時点)を第1の計測開始時点S2として認識する。
【0034】
時間計測部42は、ロータ22が一回転することで生じる誘導起電圧のパルス波の谷部から山部への切換えの数が一定数(二極三相のモータ2においては6回)であることから、第1の計測開始時点S1から数えてパルス波の谷部から山部への切換えが6回行われた時点を第1の計測終了時点E1として認識する。時間計測部42は、第1の計測開始時点S1と第1の計測終了時点E1とからロータ22の一回転にかかる時間t1を計測する。
【0035】
また、時間計測部42は、第2の計測開始時点S2から数えてパルス波の谷部から山部への切換えが6回行われた時点を第2の計測終了時点E2として認識する。時間計測部42は、第2の計測開始時点S2と第2の計測終了時点E2とからロータ22の一回転にかかる時間t2を計測する。
【0036】
また、時間計測部42は、時間t1と時間t2との重複時間ts1(すなわち第2の計測開始時点S2と第1の計測終了時点E1との間の時間)を計測する。時間計測部42は、計測した時間t1,t2を計測結果情報として平均回転数算出部43に送信する。また、時間計測部42は、計測した時間t0,t1,t2,ts1を計測結果情報として到達時間算出部44に送信する。
【0037】
平均回転数算出部43は、時間計測部42から送信された計測結果情報に基づき、各計測時間におけるロータ22の平均回転数を算出する。平均回転数算出部43は、予めプログラムされた式(1)に時間t1,t2を入力して、時間t1の計測時におけるロータ22の平均回転数N1と,時間t2の計測時におけるロータ22のN2とを算出する。平均回転数算出部43は、算出したロータ22の平均回転数N1,N2を平均回転数情報として回転数予測部45に送信する。
【0038】
到達時間算出部44は、時間計測部42から送信された計測結果情報に基づき、惰性により回転するロータ22の回転数が平均回転数算出部43の算出する平均回転数に到達するまでの時間を算出する。具体的には、到達時間算出部44は、予めプログラムされた式(4)に時間t0,t1,t2,ts1を入力して、ロータ22の回転数が平均回転数N1に到達するまでの時間T1と、ロータ22の回転数が平均回転数N2に到達するまでの時間T2とを算出する。なお、式(4)において、Tはロータの平均回転数に到達するまでの時間、tは時間計測部42が計測したロータの一回転にかかる時間であり、nは自然数である。到達時間算出部44は、算出した時間T1,T2を到達時間情報として回転数予測部45に送信する。
【数4】
【0039】
回転数予測部45は、平均回転数算出部43から送信された平均回転数情報と到達時間算出部44から送信された到達時間情報とに基づき、モータ2に対する通電停止時点T0におけるロータ22の回転数N0を予測する。回転数予測部45は、予めプログラムされたラグランジェ補間公式(3)にロータ22の平均回転数N1,N2と時間T1,T2とを入力して、通電停止時点T0におけるロータ22の回転数N0を予測する。回転数予測部45は、予測した通電停止時点T0におけるロータ22の回転数N0を予測回転数情報として表示部5に送信する。
【0040】
以上の構成を有するモータ回転数予測装置1では、時間計測部42における時間t1の計測の一部と時間t2の計測の一部とが重複しているため、連続して計測する場合と比べて、効果的にロータ22の回転数の予測にかかる時間の短縮が図られる。また、モータの仕様などにより、通電停止後の惰性によるロータの回転が2回転未満である場合においても、ロータの一回転にかかる時間を複数計測することができるので、ロータの回転数の予測が実現され、モータ回転数予測装置1の汎用性の向上が図られる。
【0041】
[第3の実施形態]
第3の実施形態に係るモータ回転数予測装置1は、第1の実施形態と比較して、時間計測部42がロータ22の一回転にかかる時間を3回計測している点が相違している。以下、第1の実施形態と構成が異なる演算部4について説明を行い、第1の実施形態と同一の構成を有するモータ2、モータ接続部3、表示部5については、その説明を省略する。
【0042】
図1、図8及び図9に示すように、第3の実施形態における時間計測部42は、誘導起電圧検出部41から送信された誘導起電圧の時間変化情報に基づき、ロータ22の一回転にかかる時間を計測する。
【0043】
誘導起電圧検出部41は、モータ接続部3に接続されたモータ2に対する通電が停止されたことを検知する。誘導起電圧検出部41は、モータ2に対する通電停止後、惰性によるロータ22の回転によって生じる誘導起電圧の時間変化を検出する。誘導起電圧検出部41は、検出した誘導起電圧の時間変化をAD変換し、デジタル化した誘導起電圧の時間変化の波形を時間変化情報として時間計測部42に送信する。
【0044】
時間計測部42は、誘導起電圧検出部41から送信された誘導起電圧の時間変化情報に基づき、ロータ22の一回転にかかる時間を計測する。具体的には、時間計測部42は、通電停止後、ロータ22の回転位置が所定の第1の基準位置となるまでの時間t0(図8のグラフにおいて通電停止時点T0から誘導起電圧のパルス波が谷部から山部に切り換わるまでの時間)を計測する。そして、時間計測部42は、時間t0の終了時点、すなわちロータ22の回転位置が第1の基準位置となった時点を第1の計測開始時点S1として認識する。時間計測部42は、第1の計測開始時点S1から数えて誘導起電圧の波形の山部が6山となった時点を第1の計測終了時点E1として認識する。時間計測部42は、第1の計測開始時点S1と第1の計測終了時点E1とからロータ22の一回転にかかる時間t1を計測する。
【0045】
また、時間計測部42は、通電停止後、ロータ22が一回転して第1の基準位置に戻った時点(すなわち第1の計測終了時点E1)を第2の計測開始時点S2として認識する。時間計測部42は、第2の計測開始時点S2から誘導起電圧の波形の山部が6山となった時点を第2の計測終了時点E2として認識し、第2の計測開始時点S2と第2の計測終了時点E2とからロータ22が一回転して再び第1の基準位置に戻るまでの時間t2を計測する。同様に、時間計測部42は、通電停止後、ロータ22が二回転して第1の基準位置に戻った時点(すなわち第2の計測終了時点E2)を第3の計測開始時点S3として認識する。時間計測部42は、第3の計測開始時点S3から数えて誘導起電圧の波形の山部が6山となった時点を第3の計測終了時点E3として認識し、第3の計測開始時点S3と第3の計測終了時点E3とからロータ22が一回転して第1の基準位置に戻るまでの時間t3を計測する。時間計測部42は、計測した時間t1,t2,t3を計測結果情報として平均回転数算出部43に送信する。また、時間計測部42は、計測した時間t0,t1,t2,t3を計測結果情報として到達時間算出部44に送信する。
【0046】
平均回転数算出部43は、時間計測部42から送信された時間t1,t2,t3を式(1)に入力して、各計測時におけるロータ22の平均回転数N1,N2,N3を算出する。平均回転数算出部43は、算出した平均回転数N1,N2,N3を平均回転数情報として回転数予測部45に送信する。
【0047】
到達時間算出部44は、時間計測部42から送信された時間t0,t1,t2,t3を式(2)に入力して、モータ2の通電停止時から、惰性により回転するロータ22の回転数がロータ22の平均回転数N1,N2,N3に到達するまでの時間T1,T2,T3を算出する。到達時間算出部44は、算出した時間T1,T2,T3を到達時間情報として回転数予測部45に送信する。
【0048】
回転数予測部45は、平均回転数算出部43から送信された平均回転数情報と到達時間算出部44から送信された到達時間情報とに基づき、ラグランジェ補間公式(3)にロータ22の平均回転数N1,N2,N3と時間T1,T2,T3とを入力して、通電停止時点T0におけるロータ22の回転数N0を予測する。回転数予測部45は、予測した通電停止時点T0におけるロータ22の回転数N0を表示部5に送信する。
【0049】
以上の構成を有するモータ回転数予測装置1では、ロータ22の一回転にかかる時間を3回計測しているので、ロータ22の一回転にかかる時間を2回計測する場合と比べて、通電停止時点T0におけるロータ22の回転数N0をより高精度に予測することが可能になる。
【0050】
本発明は、前述した実施形態に限定されないことは言うまでもない。例えば、時間計測部42によるロータ2の一回転にかかる時間の計測は、各計測間に時間差があってもよいのはもちろんである。また、計測回数は、3回以上であってもよく、3回以上計測する場合において、各計測の一部が重複する態様であってもよい。また、装置に適用されるモータは、二極三相のものに限られない。
【図面の簡単な説明】
【0051】
【図1】本発明に係るモータ回転数予測装置の構成を示すブロック図である。
【図2】図1に示したモータの断面図である。
【図3】通電停止後の誘導起電圧を示すグラフである。
【図4】通電停止後のロータの予測回転数を示すグラフである。
【図5】ロータの予測回転数と実測回転数の相関を示すグラフである。
【図6】第2の実施形態における通電停止後の誘導起電圧を示すグラフである。
【図7】第2の実施形態における通電停止後のロータの予測回転数を示すグラフである。
【図8】第3の実施形態における通電停止後の誘導起電圧を示すグラフである。
【図9】第3の実施形態における通電停止後のロータの予測回転数を示すグラフである。
【符号の説明】
【0052】
1…モータ回転数予測装置、2…モータ、3…モータ接続部、4…演算部、22…ロータ、24…コイル、25…マグネット、41…誘導起電圧検出部、42…時間計測部、43…平均回転数算出部、44…到達時間算出部、45…回転数予測部。
【特許請求の範囲】
【請求項1】
通電時にロータが回転するモータに対して通電を停止した後、惰性による前記ロータの回転によって生じる誘導起電圧から通電停止時の前記ロータの回転数を予測するモータ回転数予測装置において、
前記誘導起電圧を検出する誘導起電圧検出手段と、
前記誘導起電圧検出手段の検出結果に基づき、惰性により回転する前記ロータの一回転にかかる時間を複数計測する時間計測手段と、
前記時間計測手段の計測結果に基づき、前記時間計測手段の計測時における前記ロータの平均回転数を算出する平均回転数算出手段と、
前記モータの通電停止時から、前記平均回転数算出手段の算出した前記ロータの平均回転数に到達するまでの時間を算出する平均回転数到達時間の算出手段と、
プログラムされたラグランジュ補間公式を有し、前記平均回転数算出手段の算出結果と前記平均回転数到達時間の算出手段の算出結果とを前記ラグランジュ補間公式に入力して、通電停止時の前記ロータの回転数を予測する回転数予測手段と、
を備えることを特徴とするモータ回転数予測装置。
【請求項2】
前記時間計測手段による複数の計測は、連続していることを特徴とする請求項1に記載のモータ回転数予測装置。
【請求項3】
前記時間計測手段による複数の計測は、一部が重複していることを特徴とすることを特徴とする請求項1に記載のモータ回転数予測装置。
【請求項1】
通電時にロータが回転するモータに対して通電を停止した後、惰性による前記ロータの回転によって生じる誘導起電圧から通電停止時の前記ロータの回転数を予測するモータ回転数予測装置において、
前記誘導起電圧を検出する誘導起電圧検出手段と、
前記誘導起電圧検出手段の検出結果に基づき、惰性により回転する前記ロータの一回転にかかる時間を複数計測する時間計測手段と、
前記時間計測手段の計測結果に基づき、前記時間計測手段の計測時における前記ロータの平均回転数を算出する平均回転数算出手段と、
前記モータの通電停止時から、前記平均回転数算出手段の算出した前記ロータの平均回転数に到達するまでの時間を算出する平均回転数到達時間の算出手段と、
プログラムされたラグランジュ補間公式を有し、前記平均回転数算出手段の算出結果と前記平均回転数到達時間の算出手段の算出結果とを前記ラグランジュ補間公式に入力して、通電停止時の前記ロータの回転数を予測する回転数予測手段と、
を備えることを特徴とするモータ回転数予測装置。
【請求項2】
前記時間計測手段による複数の計測は、連続していることを特徴とする請求項1に記載のモータ回転数予測装置。
【請求項3】
前記時間計測手段による複数の計測は、一部が重複していることを特徴とすることを特徴とする請求項1に記載のモータ回転数予測装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−130857(P2010−130857A)
【公開日】平成22年6月10日(2010.6.10)
【国際特許分類】
【出願番号】特願2008−305345(P2008−305345)
【出願日】平成20年11月28日(2008.11.28)
【出願人】(000001225)日本電産コパル株式会社 (755)
【Fターム(参考)】
【公開日】平成22年6月10日(2010.6.10)
【国際特許分類】
【出願日】平成20年11月28日(2008.11.28)
【出願人】(000001225)日本電産コパル株式会社 (755)
【Fターム(参考)】
[ Back to top ]