
モータ角度検出装置
【課題】コネクタの酸化皮膜を除去することができる安価なモータ角度検出装置を提供する。
【解決手段】
【0040】
励磁信号により磁束を発生する励磁コイル及び回転角度に応じて検出信号を発生する検出コイルで成るレゾルバと、検出信号を入力する受信回路と、励磁信号を発生し、受信回路からの検出信号及び励磁信号に基づいて回転角度を演算するコントロールユニットとを備えたモータ角度検出装置において、受信回路の入力側に電圧クランプ回路を設け、検出精度の向上対策が必要なときに励磁信号の振幅を大きくする機能を具備する。
【解決手段】
【0040】
励磁信号により磁束を発生する励磁コイル及び回転角度に応じて検出信号を発生する検出コイルで成るレゾルバと、検出信号を入力する受信回路と、励磁信号を発生し、受信回路からの検出信号及び励磁信号に基づいて回転角度を演算するコントロールユニットとを備えたモータ角度検出装置において、受信回路の入力側に電圧クランプ回路を設け、検出精度の向上対策が必要なときに励磁信号の振幅を大きくする機能を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータ等の回転角度を検出するために用いられるレゾルバを備えたモータ角度検出装置に関し、特に、レゾルバと受信回路を繋ぐコネクタの接点に形成された酸化皮膜を破壊する機能を有し、特に車両の電動パワーステアリング装置に最適なモータ角度検出装置に関するものである。
【背景技術】
【0002】
電動パワーステアリング装置のアクチュエータにブラシレスモータを用いる場合、該モータの角度(位置)検出器としてレゾルバが広く用いられている。レゾルバは、電動モータ等の回転体(モータロータ)に取り付けられ、該回転体と一体回転するロータと、モータケース等に固定されているステータとを有している。このレゾルバは、一般的にワイヤーハーネス、コネクタ等を介してコントロールユニットと接続されている。
【0003】
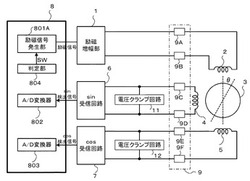
図1は、従来のモータ角度検出装置の一例を示す構成図である。レゾルバは、レゾルバステータとレゾルバロータ3から成り(モータケースに固定されているレゾルバステータは図示していない)、励磁コイル2、sin検出コイル4及びcos検出コイル5が、レゾルバステータに巻回されている。
【0004】
励磁コイル2、sin検出コイル4及びcos検出コイル5は、それぞれコネクタ9A及び9B、9C及び9D、9E及び9Fを経て、励磁増幅部1、sin受信回路6及びcos受信回路7と接続されている。
【0005】
励磁増幅部1は、コントロールユニット8の励磁信号発生部801により発生された正弦波の励磁信号を入力して増幅し、コネクタ9A、9Bを介して励磁コイル2を駆動して磁束を発生している。
【0006】
sin検出コイル4及びcos検出コイル5は、レゾルバロータ3を介して励磁コイルで発生した磁束に励磁され、それぞれsin検出信号及びcos検出信号を発生する。sin検出信号及びcos検出信号が、それぞれコネクタ9C、9D及び9E、9Fを介してsin受信回路6及びcos受信回路7へ入力されている。
【0007】
sin受信回路6及びcos受信回路7は、それぞれsin検出信号及びcos検出信号を入力して所定の処理を行い、処理されたsin検出信号及びcos検出信号をコントロールユニット8内のA/D変換器802及び803へ入力している。コントロールユニット8は、ディジタル信号に変換されたsin検出信号及びcos検出信号に基づいてモータの回転角度を算出するようにしている。
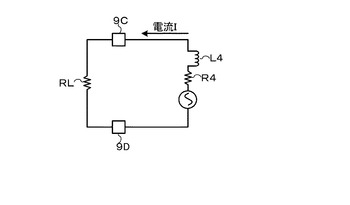
【0008】
このような構成において、sin受信回路6及びsin検出コイル4部分の等価回路は図2に示すように、sin検出コイル4の抵抗成分はR4であり、インダクタンス成分はL4であり、sin受信回路6の入力インピーダンスはRLであり、sin検出コイル4とsin受信回路6はコネクタ9C及び9Dにより接続され、コネクタ9C及び9Dは所定の接触抵抗を有している。sin検出コイル4の抵抗成分R4は、温度等の外乱により変動しやすいので、抵抗成分R4の温度依存性等の影響を低減し、角度検出精度を向上させるために、sin受信回路6において、入力インピーダンスRLはsin検出信号の出力インピーダンスの抵抗成分R4に対して十分に高く設定することが望ましい。
【0009】
しかし、レゾルバの出力インピーダンスの抵抗成分R4は数百オーム程度であるため、入力インピーダンスRLを高く設定してしまうと、sin検出コイル4に流れる電流は数μA〜数十μAと非常に小さい電流になってしまう。更に、sin検出コイル4に流れる電流が小さい場合、経時劣化等の要因でコネクタ9C及び9Dの接点に酸化皮膜が形成され、接触抵抗が増大し、正確な信号の受信が困難になる恐れがある。cos検出コイル5の場合も同様である。
【0010】
このような問題を解決するために、特許文献1(特開2007−82322号公報)では、モータのスイッチオン時に、モータのロータ位置を検出する検出回路の信号入力端部を短絡し、検出回路に接続されるコネクタの接続端子に通常使用時以上の電流を流すようにしているモータ位置検出装置が提案されている。また、特許文献2(特開2001−82980号公報)では、励磁増幅部の電源電圧を別系統とし、高い電圧を加えることにより、装置全体の発熱を抑制しながら、コネクタの絶縁被膜を破壊する電気車用レゾルバ処理装置が提案されている。更に、コネクタ接触部の酸化を防ぐため、金メッキ処理等の特別処理も広く知られている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−82322号公報
【特許文献2】特開2001−82980号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかし、コネクタ9に金メッキ処理等を行うと、コストアップしてしまうという問題がある。特許文献1に記載のモータ位置検出装置は、モータのスイッチオン時のみにレゾルバ入力端を短絡させるための短絡回路が必要となり、コストが高くなる問題がある。また、特許文献2に記載のレゾルバ処理装置では、励磁増幅部ための特別な電流確保用回路が必要となり、コストが高くなる問題がある。
【0013】
本発明は上述のような事情よりなされたものであり、本発明の目的は、コネクタの酸化皮膜を除去することができる安価なモータ角度検出装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明は、励磁信号により磁束を発生する励磁コイル及び回転角度に応じて検出信号を発生する検出コイルで成るレゾルバと、前記検出信号を入力する受信回路と、前記励磁信号を発生し、前記受信回路からの検出信号及び前記励磁信号に基づいて前記回転角度を演算するコントロールユニットとを備えたモータ角度検出装置に関し、本発明の上記目的は、前記受信回路の入力側に電圧クランプ回路を設け、検出精度の向上対策が必要なときに前記励磁信号の振幅を大きくする機能を具備することより達成される。
【0015】
更に、本発明の上記目的は、前記コントロールユニットの励磁信号発生部で前記励磁信号の振幅を大きくすることにより、より効果的に達成される。また、本発明の上記目的は、前記励磁信号を増幅する励磁増幅部で通常時より大きい増幅率に切り換えることにより、前記励磁信号を大きくすることにより、より効果的達成される。
【0016】
また、本発明の上記目的は、前記検出精度の向上対策の必要性の判定が判定部で行なわれることにより、より効果的達成される。また、本発明の上記目的は、前記モータのロータが回転していないときに、前記判定部が前記検出精度の向上対策が必要であると判定することにより、より効果的達成される。
【0017】
また、本発明の上記目的は、前記電圧クランプ部がツェナーダイオードで構成されていることにより、より効果的達成される。
【発明の効果】
【0018】
本発明によれば、レゾルバ検出信号の受信回路を過大な入力電圧から保護できると共に、レゾルバのコネクタ部分に大きな電流を流すことにより、コネクタ接点の酸化皮膜を除去することができる。従って、モータ角度検出装置の検出精度を向上することができる。
【0019】
また、本発明によれば、金メッキ等の特別処理を行う必要がなく、電圧クランプ回路の構造が簡単であるため、コストアップすることはなく、安価なモータ角度検出装置を提供することができる。
【図面の簡単な説明】
【0020】
【図1】従来のモータ角度検出装置の一例を示す構成図である
【図2】従来のモータ角度検出装置のsin検出コイル部分の等価回路である。
【図3】本発明の実施例1に係るモータ角度検出装置を示す構成図である。
【図4】本発明の実施例1に係るモータ角度検出装置のsin検出部分の結線図である。
【図5】本発明の実施例1に係るモータ角度検出装置において、通常駆動時の励磁信号とsin検出信号の波形図である。
【図6】本発明の実施例1に係るモータ角度検出装置において、検出精度の向上対策を行う時の励磁信号とsin検出信号の波形図である。
【図7】本発明の実施例1に係るモータ角度検出装置において、sin検出信号の振幅がクランプ電圧より高い時のsin検出回路部分の挙動を説明するための回路図である。
【図8】本発明の実施例2に係るモータ角度検出装置を示す構成図である。
【発明を実施するための形態】
【0021】
本発明では、コネクタ9部分に発生する酸化皮膜がもたらす問題を解決するために、コネクタ9に一時的に大きな電流を流すことにより、該酸化皮膜を破壊するようにしている。すなわち、sin受信回路6及びcos受信回路7の入力側に電圧クランプ回路を設け、検出精度の向上対策を行うときに、励磁信号の振幅を通常駆動時の振幅の所定倍にすることにより、コネクタ9に大きい電流を流させ、酸化皮膜を破壊するようにしている。
【0022】
以下に、本発明の実施の形態を図面を参照して説明する。
(実施例1)
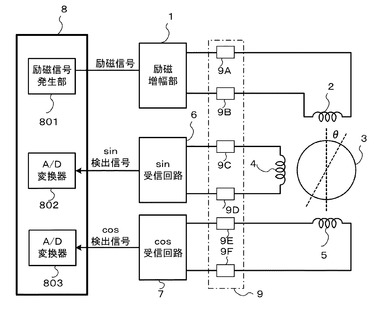
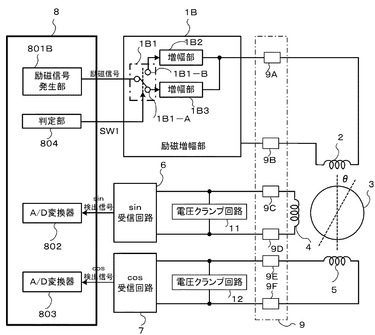
図3は本発明の実施例1に係るモータ角度検出装置の構成図であり、図1に対応させて示しており、同一部材には同一符号を付して説明を省略する。コネクタ9に発生した酸化皮膜を破壊するために、コントロールユニット8には判定部804及び励磁信号発生部801Aを設けており、また、sin受信回路6及びcos受信回路7の各入力側に電圧クランプ回路11及び12を備えている。
【0023】
コントロールユニット8は、励磁信号発生部801Aにより励磁信号を発生し、励磁増幅部1へ出力すると共に、sin受信回路6及びcos受信回路7からsin検出信号及びcos検出信号を入力し、それぞれA/D変換器802及び803によりディジタル信号に変換する。コントロールユニット8の演算部(図示せず)は、励磁信号、及びディジタル変換されたsin検出信号、cos検出信号に基づく三角関数の演算により、モータ角度θを検出する。
【0024】
判定部804は、検出精度の向上対策を行うか否かを判定する機能を有しており、判定基準として、モータを備えた電動パワーステアリング装置が初期診断中であるか、或いは直進走行中であるか、或いはモータのロータが回転していないか等を適用することができる。また、車両の仕様に合わせて他の基準を加えることも可能である。判定部804が検出精度の向上対策を行わないと判定したときに、「0」である判定信号SWを励磁信号発生部801Aへ入力する。逆に、検出精度の向上対策を行うべきであると判定したときに、「1」である判定信号SWを励磁信号発生部801Aへ入力する。
【0025】
励磁信号発生部801Aは判定部804から判定信号SWを入力し、判定信号SWに応じて励磁信号を発生し、励磁増幅部1へ入力している。判定信号SWが「0」であるときに、通常駆動時の振幅を励磁信号の振幅として励磁信号を発生する。一方、判定信号SWが「1」であるときに、通常駆動時の振幅の所定倍(例えば1.5倍)である振幅を励磁信号の振幅として励磁信号を発生する。このようにすると、検出精度の向上対策を行わないときには通常駆動を行い、検出精度の向上対策を行うときに、振幅が通常駆動時の所定倍である励磁信号が励磁信号発生部801Aで発生される。
【0026】
励磁増幅部1は、コントロールユニット8から入力された励磁信号を増幅して励磁コイル2へ印加している。励磁信号はコネクタ9A、9Bを介して励磁コイル2を駆動して磁束を発生する。sin検出コイル4及びcos検出コイル5は、レゾルバロータ3を介して励磁コイル2で発生した磁束に対して三角関数の関係で励磁され、それぞれsin検出信号及びcos検出信号を発生する。sin検出信号及びcos検出信号が、それぞれコネクタ9C、9D及び9E、9Fを介してsin受信回路6及びcos受信回路7へ入力されている。
【0027】
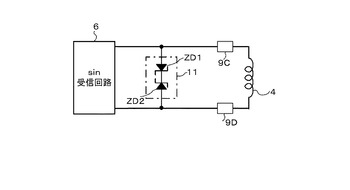
本発明ではsin受信回路6及びcos受信回路7の入力側に電圧クランプ回路11及び12が接続されており、電圧クランプ回路11及び12は、静電気等の影響で高電圧が発生された際に、受信回路6又は7に過大な電圧が印加され、素子が破壊されるのを保護する目的で挿入される保護回路であり、図4はsin検出部分を例として、本実施例の電圧クランプ回路11の構成例を示す結線図である。
【0028】
図4に示すように、電圧クランプ回路11は、2つの互いに対向して配置されているツェナーダイオードZD1及びZD2から成る。sin受信回路6の入力耐電圧を±C[V]、電圧クランプ回路11のクランプ電圧D[V]とする。ここで、ツェナーダイオードZD1及びZD2のツェナー降伏電圧は(C−Vf)[V]以下に選ぶことが好ましく(VfはツェナーダイオードZD1及びZD2の順方向の電圧降下)、つまり、クランプ電圧D[V]は(C−Vf)[V]以下である。このようにすると、sin検出コイル4に高電圧が発生し、ツェナーダイオードZD1又はZD2の一方に印加されている電圧がツェナー降伏電圧を超えると、ツェナー効果が起き、受信回路6の入力電圧がクランプ電圧D[V]に維持され、sin受信回路6が高電圧から保護される。電圧クランプ回路12についても同様である。
【0029】
モータのロータ角度がθであり、励磁周波数がfである場合、励磁信号、sin検出信号、cos検出信号の電圧関係は数1のとおりである。
【0030】
(数1)
V=A*sin(2*π*f*t)
Vsin=A*B*sinθ*sin(2*π*f*t+φ)
Vcos=A*B*cosθ*cos(2*π*f*t+φ)
A:励磁信号の振幅 t:時間
B:励磁振幅に対する受信振幅の係数(レゾルバの固有定数)
φ:励磁位相に対する受信位相の遅れ(レゾルバの固有定数)
ただし、温度、電圧及び経年劣化等による変動は無視できるものと仮定する。
【0031】
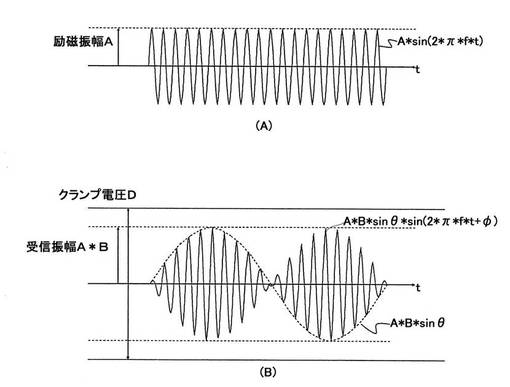
図5(A)は通常駆動時の励磁信号であり、図5(B)はsin検出信号の波形図であり、励磁信号の振幅はAであり、sin検出信号の振幅はA*Bである(図示しないが、cos検出信号の振幅もA*Bである)。sin検出信号の振幅はクランプ電圧D[V]以下であり、sin検出コイルに流れている電流Iの全てはsin受信回路6に入力されている。
【0032】
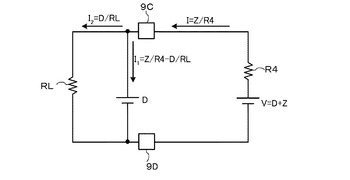
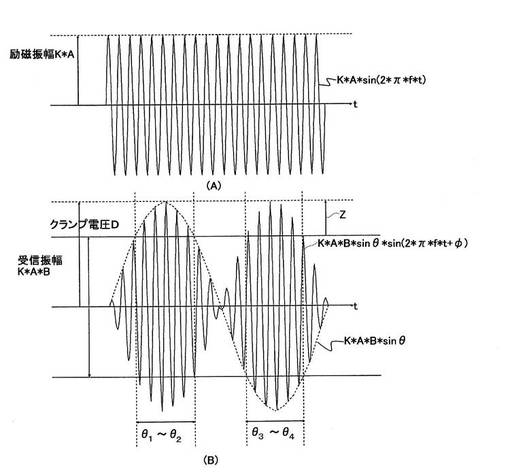
一方、図6(A)は振幅が所定倍K(K>1)にされた励磁信号により励磁コイル2を駆動しているときの励磁信号の波形図を示し、図6(B)はsin検出信号の波形図を示している。励磁信号の振幅はK*Aであり、sin検出信号の振幅はK*A*Bであり、電圧クランプ回路11のクランプ電圧D[V]より大きくなっている。図6に示すように、モータのロータ角度θがθ1〜θ2又はθ3〜θ4であるときに、sin検出信号はクランプ電圧Dより大きいので、ツェナーダイオードZD1及びZD2の両端に印加された電圧はツェナー降伏電圧以上であり、ツェナーダイオードZD1及びZD2両端の電圧がD[V]にクランプされる。このとき、sin検出コイル4部分の回路挙動は図7に示すようになっている。すなわち、生成した誘起電圧をVとし、誘起電圧がクランプ電圧を超えた部分をZ[V]とすると、sin検出コイル4、コネクタ9C及び9Dに流れている電流IはZ/R4であり、sin受信回路6の入力電流I2はD/RLであり、ツェナーダイオードZD1及びZD2に流れている電流I1は(Z/R4−D/RL)である。sin検出コイル4の抵抗成分R4が小さいため、コネクタ9C及び9Dに流れている電流I=Z/R4は十分大きいものであり、これにより、コネクタ9C、9Dの酸化皮膜が除去される。この結果、コネクタ9C、9Dの接触抵抗を小さくすることができる。
(実施例2)
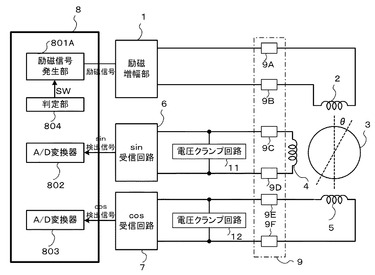
図8は、本発明の実施例2に係るモータ角度検出装置の構成を示す説明図であり、図3に対応させて示しており、同一部材には同一符号を付して説明を省略する。本実施例では、励磁増幅部1Bに2つの増幅部1B2及び1B3を設けると共に、増幅部1B2及び1B3の前段に切換部1B1を設けている。
【0033】
励磁信号発生部801Bは、所定周波数の励磁信号を発生して励磁増幅部1B内の切換部1B1へ入力している。判定部804は、前述と同様に検出精度の向上対策を行うか否かを判定し、検出精度の向上対策を行わないと判定したときに、「0」である判定信号SW1を切換部1B1へ入力している。検出精度の向上対策を行うべきであると判定したときに、「1」である判定信号SW1を切換部1B1へ入力している。
【0034】
切換部1B1は、判定部804からの判定信号SW1に応じて異なる増幅率を有する増幅部1B2及び1B3の一方に切り換え、入力された励磁信号を増幅している。ここで、増幅部1B2は通常駆動時の増幅率に設定されており、増幅部1B3は、通常駆動時の増幅率の所定倍(例えば1.5倍)である増幅率に設定されており、振幅が電圧クランプ回路11及び12のクランプ電圧D[V]を超える励磁信号を発生するように設定されている。
【0035】
励磁増幅部1Bは、「0」である判定信号SW1を入力したときに、切換部1B1が接点1B1−Bに切り換え、通常駆動時の励磁信号を生成して励磁コイル2を駆動する。一方、「1」である判定信号を入力したときに、切換部1B1は接点1B1−Aに切り換え、振幅がクランプ電圧D[V]より大きい励磁信号を生成して励磁コイル2を駆動する。そして、sin検出コイル4及びcos検出コイル5に大きな電流を流させ、コネクタ9部分に大きな電流を流して酸化皮膜を除去する。
【0036】
また、実施例1と同様に、sin検出コイル4及びcos検出コイル5には、それぞれ電圧クランプ回路11及び12が設けられているので、sin検出コイル4及びcos検出コイル5に大きな電流を流しても、sin受信回路6及びcos受信回路7の入力電圧がクランプ電圧D[V]に固定され、sin受信回路6及びcos受信回路7を高入力電圧から保護することができる。
【0037】
更に、上述した実施例1及び2は、1相励磁2相出力VR型レゾルバにおいて本発明の実施例を説明した。しかし、1相励磁3相出力VR型レゾルバの場合、3相の検出コイルにおいて個別に電圧クランプ回路を設ければ、同様な効果が得られる。
【0038】
本発明に係るモータ角度検出装置は車両の電動パワーステアリング装置に最適であり、電動パワーステアリング装置の初期診断時、或いはロータが回転していない直進走行時等のタイミングに合わせて、酸化皮膜の破壊動作を実施することが望ましい。
【符号の説明】
【0039】
1、1B 励磁増幅部
2 励磁コイル
3 レゾルバロータ
4 sin検出コイル
5 cos検出コイル
6 sin受信回路
7 cos受信回路
8 コントロールユニット
9 コネクタ
11、12 電圧クランプ回路
801、801B 励磁信号発生部
802、803 A/D変換器
804 判定部
1B1 切換部
1B2、1B3 増幅部
【技術分野】
【0001】
本発明は、モータ等の回転角度を検出するために用いられるレゾルバを備えたモータ角度検出装置に関し、特に、レゾルバと受信回路を繋ぐコネクタの接点に形成された酸化皮膜を破壊する機能を有し、特に車両の電動パワーステアリング装置に最適なモータ角度検出装置に関するものである。
【背景技術】
【0002】
電動パワーステアリング装置のアクチュエータにブラシレスモータを用いる場合、該モータの角度(位置)検出器としてレゾルバが広く用いられている。レゾルバは、電動モータ等の回転体(モータロータ)に取り付けられ、該回転体と一体回転するロータと、モータケース等に固定されているステータとを有している。このレゾルバは、一般的にワイヤーハーネス、コネクタ等を介してコントロールユニットと接続されている。
【0003】
図1は、従来のモータ角度検出装置の一例を示す構成図である。レゾルバは、レゾルバステータとレゾルバロータ3から成り(モータケースに固定されているレゾルバステータは図示していない)、励磁コイル2、sin検出コイル4及びcos検出コイル5が、レゾルバステータに巻回されている。
【0004】
励磁コイル2、sin検出コイル4及びcos検出コイル5は、それぞれコネクタ9A及び9B、9C及び9D、9E及び9Fを経て、励磁増幅部1、sin受信回路6及びcos受信回路7と接続されている。
【0005】
励磁増幅部1は、コントロールユニット8の励磁信号発生部801により発生された正弦波の励磁信号を入力して増幅し、コネクタ9A、9Bを介して励磁コイル2を駆動して磁束を発生している。
【0006】
sin検出コイル4及びcos検出コイル5は、レゾルバロータ3を介して励磁コイルで発生した磁束に励磁され、それぞれsin検出信号及びcos検出信号を発生する。sin検出信号及びcos検出信号が、それぞれコネクタ9C、9D及び9E、9Fを介してsin受信回路6及びcos受信回路7へ入力されている。
【0007】
sin受信回路6及びcos受信回路7は、それぞれsin検出信号及びcos検出信号を入力して所定の処理を行い、処理されたsin検出信号及びcos検出信号をコントロールユニット8内のA/D変換器802及び803へ入力している。コントロールユニット8は、ディジタル信号に変換されたsin検出信号及びcos検出信号に基づいてモータの回転角度を算出するようにしている。
【0008】
このような構成において、sin受信回路6及びsin検出コイル4部分の等価回路は図2に示すように、sin検出コイル4の抵抗成分はR4であり、インダクタンス成分はL4であり、sin受信回路6の入力インピーダンスはRLであり、sin検出コイル4とsin受信回路6はコネクタ9C及び9Dにより接続され、コネクタ9C及び9Dは所定の接触抵抗を有している。sin検出コイル4の抵抗成分R4は、温度等の外乱により変動しやすいので、抵抗成分R4の温度依存性等の影響を低減し、角度検出精度を向上させるために、sin受信回路6において、入力インピーダンスRLはsin検出信号の出力インピーダンスの抵抗成分R4に対して十分に高く設定することが望ましい。
【0009】
しかし、レゾルバの出力インピーダンスの抵抗成分R4は数百オーム程度であるため、入力インピーダンスRLを高く設定してしまうと、sin検出コイル4に流れる電流は数μA〜数十μAと非常に小さい電流になってしまう。更に、sin検出コイル4に流れる電流が小さい場合、経時劣化等の要因でコネクタ9C及び9Dの接点に酸化皮膜が形成され、接触抵抗が増大し、正確な信号の受信が困難になる恐れがある。cos検出コイル5の場合も同様である。
【0010】
このような問題を解決するために、特許文献1(特開2007−82322号公報)では、モータのスイッチオン時に、モータのロータ位置を検出する検出回路の信号入力端部を短絡し、検出回路に接続されるコネクタの接続端子に通常使用時以上の電流を流すようにしているモータ位置検出装置が提案されている。また、特許文献2(特開2001−82980号公報)では、励磁増幅部の電源電圧を別系統とし、高い電圧を加えることにより、装置全体の発熱を抑制しながら、コネクタの絶縁被膜を破壊する電気車用レゾルバ処理装置が提案されている。更に、コネクタ接触部の酸化を防ぐため、金メッキ処理等の特別処理も広く知られている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−82322号公報
【特許文献2】特開2001−82980号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかし、コネクタ9に金メッキ処理等を行うと、コストアップしてしまうという問題がある。特許文献1に記載のモータ位置検出装置は、モータのスイッチオン時のみにレゾルバ入力端を短絡させるための短絡回路が必要となり、コストが高くなる問題がある。また、特許文献2に記載のレゾルバ処理装置では、励磁増幅部ための特別な電流確保用回路が必要となり、コストが高くなる問題がある。
【0013】
本発明は上述のような事情よりなされたものであり、本発明の目的は、コネクタの酸化皮膜を除去することができる安価なモータ角度検出装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明は、励磁信号により磁束を発生する励磁コイル及び回転角度に応じて検出信号を発生する検出コイルで成るレゾルバと、前記検出信号を入力する受信回路と、前記励磁信号を発生し、前記受信回路からの検出信号及び前記励磁信号に基づいて前記回転角度を演算するコントロールユニットとを備えたモータ角度検出装置に関し、本発明の上記目的は、前記受信回路の入力側に電圧クランプ回路を設け、検出精度の向上対策が必要なときに前記励磁信号の振幅を大きくする機能を具備することより達成される。
【0015】
更に、本発明の上記目的は、前記コントロールユニットの励磁信号発生部で前記励磁信号の振幅を大きくすることにより、より効果的に達成される。また、本発明の上記目的は、前記励磁信号を増幅する励磁増幅部で通常時より大きい増幅率に切り換えることにより、前記励磁信号を大きくすることにより、より効果的達成される。
【0016】
また、本発明の上記目的は、前記検出精度の向上対策の必要性の判定が判定部で行なわれることにより、より効果的達成される。また、本発明の上記目的は、前記モータのロータが回転していないときに、前記判定部が前記検出精度の向上対策が必要であると判定することにより、より効果的達成される。
【0017】
また、本発明の上記目的は、前記電圧クランプ部がツェナーダイオードで構成されていることにより、より効果的達成される。
【発明の効果】
【0018】
本発明によれば、レゾルバ検出信号の受信回路を過大な入力電圧から保護できると共に、レゾルバのコネクタ部分に大きな電流を流すことにより、コネクタ接点の酸化皮膜を除去することができる。従って、モータ角度検出装置の検出精度を向上することができる。
【0019】
また、本発明によれば、金メッキ等の特別処理を行う必要がなく、電圧クランプ回路の構造が簡単であるため、コストアップすることはなく、安価なモータ角度検出装置を提供することができる。
【図面の簡単な説明】
【0020】
【図1】従来のモータ角度検出装置の一例を示す構成図である
【図2】従来のモータ角度検出装置のsin検出コイル部分の等価回路である。
【図3】本発明の実施例1に係るモータ角度検出装置を示す構成図である。
【図4】本発明の実施例1に係るモータ角度検出装置のsin検出部分の結線図である。
【図5】本発明の実施例1に係るモータ角度検出装置において、通常駆動時の励磁信号とsin検出信号の波形図である。
【図6】本発明の実施例1に係るモータ角度検出装置において、検出精度の向上対策を行う時の励磁信号とsin検出信号の波形図である。
【図7】本発明の実施例1に係るモータ角度検出装置において、sin検出信号の振幅がクランプ電圧より高い時のsin検出回路部分の挙動を説明するための回路図である。
【図8】本発明の実施例2に係るモータ角度検出装置を示す構成図である。
【発明を実施するための形態】
【0021】
本発明では、コネクタ9部分に発生する酸化皮膜がもたらす問題を解決するために、コネクタ9に一時的に大きな電流を流すことにより、該酸化皮膜を破壊するようにしている。すなわち、sin受信回路6及びcos受信回路7の入力側に電圧クランプ回路を設け、検出精度の向上対策を行うときに、励磁信号の振幅を通常駆動時の振幅の所定倍にすることにより、コネクタ9に大きい電流を流させ、酸化皮膜を破壊するようにしている。
【0022】
以下に、本発明の実施の形態を図面を参照して説明する。
(実施例1)
図3は本発明の実施例1に係るモータ角度検出装置の構成図であり、図1に対応させて示しており、同一部材には同一符号を付して説明を省略する。コネクタ9に発生した酸化皮膜を破壊するために、コントロールユニット8には判定部804及び励磁信号発生部801Aを設けており、また、sin受信回路6及びcos受信回路7の各入力側に電圧クランプ回路11及び12を備えている。
【0023】
コントロールユニット8は、励磁信号発生部801Aにより励磁信号を発生し、励磁増幅部1へ出力すると共に、sin受信回路6及びcos受信回路7からsin検出信号及びcos検出信号を入力し、それぞれA/D変換器802及び803によりディジタル信号に変換する。コントロールユニット8の演算部(図示せず)は、励磁信号、及びディジタル変換されたsin検出信号、cos検出信号に基づく三角関数の演算により、モータ角度θを検出する。
【0024】
判定部804は、検出精度の向上対策を行うか否かを判定する機能を有しており、判定基準として、モータを備えた電動パワーステアリング装置が初期診断中であるか、或いは直進走行中であるか、或いはモータのロータが回転していないか等を適用することができる。また、車両の仕様に合わせて他の基準を加えることも可能である。判定部804が検出精度の向上対策を行わないと判定したときに、「0」である判定信号SWを励磁信号発生部801Aへ入力する。逆に、検出精度の向上対策を行うべきであると判定したときに、「1」である判定信号SWを励磁信号発生部801Aへ入力する。
【0025】
励磁信号発生部801Aは判定部804から判定信号SWを入力し、判定信号SWに応じて励磁信号を発生し、励磁増幅部1へ入力している。判定信号SWが「0」であるときに、通常駆動時の振幅を励磁信号の振幅として励磁信号を発生する。一方、判定信号SWが「1」であるときに、通常駆動時の振幅の所定倍(例えば1.5倍)である振幅を励磁信号の振幅として励磁信号を発生する。このようにすると、検出精度の向上対策を行わないときには通常駆動を行い、検出精度の向上対策を行うときに、振幅が通常駆動時の所定倍である励磁信号が励磁信号発生部801Aで発生される。
【0026】
励磁増幅部1は、コントロールユニット8から入力された励磁信号を増幅して励磁コイル2へ印加している。励磁信号はコネクタ9A、9Bを介して励磁コイル2を駆動して磁束を発生する。sin検出コイル4及びcos検出コイル5は、レゾルバロータ3を介して励磁コイル2で発生した磁束に対して三角関数の関係で励磁され、それぞれsin検出信号及びcos検出信号を発生する。sin検出信号及びcos検出信号が、それぞれコネクタ9C、9D及び9E、9Fを介してsin受信回路6及びcos受信回路7へ入力されている。
【0027】
本発明ではsin受信回路6及びcos受信回路7の入力側に電圧クランプ回路11及び12が接続されており、電圧クランプ回路11及び12は、静電気等の影響で高電圧が発生された際に、受信回路6又は7に過大な電圧が印加され、素子が破壊されるのを保護する目的で挿入される保護回路であり、図4はsin検出部分を例として、本実施例の電圧クランプ回路11の構成例を示す結線図である。
【0028】
図4に示すように、電圧クランプ回路11は、2つの互いに対向して配置されているツェナーダイオードZD1及びZD2から成る。sin受信回路6の入力耐電圧を±C[V]、電圧クランプ回路11のクランプ電圧D[V]とする。ここで、ツェナーダイオードZD1及びZD2のツェナー降伏電圧は(C−Vf)[V]以下に選ぶことが好ましく(VfはツェナーダイオードZD1及びZD2の順方向の電圧降下)、つまり、クランプ電圧D[V]は(C−Vf)[V]以下である。このようにすると、sin検出コイル4に高電圧が発生し、ツェナーダイオードZD1又はZD2の一方に印加されている電圧がツェナー降伏電圧を超えると、ツェナー効果が起き、受信回路6の入力電圧がクランプ電圧D[V]に維持され、sin受信回路6が高電圧から保護される。電圧クランプ回路12についても同様である。
【0029】
モータのロータ角度がθであり、励磁周波数がfである場合、励磁信号、sin検出信号、cos検出信号の電圧関係は数1のとおりである。
【0030】
(数1)
V=A*sin(2*π*f*t)
Vsin=A*B*sinθ*sin(2*π*f*t+φ)
Vcos=A*B*cosθ*cos(2*π*f*t+φ)
A:励磁信号の振幅 t:時間
B:励磁振幅に対する受信振幅の係数(レゾルバの固有定数)
φ:励磁位相に対する受信位相の遅れ(レゾルバの固有定数)
ただし、温度、電圧及び経年劣化等による変動は無視できるものと仮定する。
【0031】
図5(A)は通常駆動時の励磁信号であり、図5(B)はsin検出信号の波形図であり、励磁信号の振幅はAであり、sin検出信号の振幅はA*Bである(図示しないが、cos検出信号の振幅もA*Bである)。sin検出信号の振幅はクランプ電圧D[V]以下であり、sin検出コイルに流れている電流Iの全てはsin受信回路6に入力されている。
【0032】
一方、図6(A)は振幅が所定倍K(K>1)にされた励磁信号により励磁コイル2を駆動しているときの励磁信号の波形図を示し、図6(B)はsin検出信号の波形図を示している。励磁信号の振幅はK*Aであり、sin検出信号の振幅はK*A*Bであり、電圧クランプ回路11のクランプ電圧D[V]より大きくなっている。図6に示すように、モータのロータ角度θがθ1〜θ2又はθ3〜θ4であるときに、sin検出信号はクランプ電圧Dより大きいので、ツェナーダイオードZD1及びZD2の両端に印加された電圧はツェナー降伏電圧以上であり、ツェナーダイオードZD1及びZD2両端の電圧がD[V]にクランプされる。このとき、sin検出コイル4部分の回路挙動は図7に示すようになっている。すなわち、生成した誘起電圧をVとし、誘起電圧がクランプ電圧を超えた部分をZ[V]とすると、sin検出コイル4、コネクタ9C及び9Dに流れている電流IはZ/R4であり、sin受信回路6の入力電流I2はD/RLであり、ツェナーダイオードZD1及びZD2に流れている電流I1は(Z/R4−D/RL)である。sin検出コイル4の抵抗成分R4が小さいため、コネクタ9C及び9Dに流れている電流I=Z/R4は十分大きいものであり、これにより、コネクタ9C、9Dの酸化皮膜が除去される。この結果、コネクタ9C、9Dの接触抵抗を小さくすることができる。
(実施例2)
図8は、本発明の実施例2に係るモータ角度検出装置の構成を示す説明図であり、図3に対応させて示しており、同一部材には同一符号を付して説明を省略する。本実施例では、励磁増幅部1Bに2つの増幅部1B2及び1B3を設けると共に、増幅部1B2及び1B3の前段に切換部1B1を設けている。
【0033】
励磁信号発生部801Bは、所定周波数の励磁信号を発生して励磁増幅部1B内の切換部1B1へ入力している。判定部804は、前述と同様に検出精度の向上対策を行うか否かを判定し、検出精度の向上対策を行わないと判定したときに、「0」である判定信号SW1を切換部1B1へ入力している。検出精度の向上対策を行うべきであると判定したときに、「1」である判定信号SW1を切換部1B1へ入力している。
【0034】
切換部1B1は、判定部804からの判定信号SW1に応じて異なる増幅率を有する増幅部1B2及び1B3の一方に切り換え、入力された励磁信号を増幅している。ここで、増幅部1B2は通常駆動時の増幅率に設定されており、増幅部1B3は、通常駆動時の増幅率の所定倍(例えば1.5倍)である増幅率に設定されており、振幅が電圧クランプ回路11及び12のクランプ電圧D[V]を超える励磁信号を発生するように設定されている。
【0035】
励磁増幅部1Bは、「0」である判定信号SW1を入力したときに、切換部1B1が接点1B1−Bに切り換え、通常駆動時の励磁信号を生成して励磁コイル2を駆動する。一方、「1」である判定信号を入力したときに、切換部1B1は接点1B1−Aに切り換え、振幅がクランプ電圧D[V]より大きい励磁信号を生成して励磁コイル2を駆動する。そして、sin検出コイル4及びcos検出コイル5に大きな電流を流させ、コネクタ9部分に大きな電流を流して酸化皮膜を除去する。
【0036】
また、実施例1と同様に、sin検出コイル4及びcos検出コイル5には、それぞれ電圧クランプ回路11及び12が設けられているので、sin検出コイル4及びcos検出コイル5に大きな電流を流しても、sin受信回路6及びcos受信回路7の入力電圧がクランプ電圧D[V]に固定され、sin受信回路6及びcos受信回路7を高入力電圧から保護することができる。
【0037】
更に、上述した実施例1及び2は、1相励磁2相出力VR型レゾルバにおいて本発明の実施例を説明した。しかし、1相励磁3相出力VR型レゾルバの場合、3相の検出コイルにおいて個別に電圧クランプ回路を設ければ、同様な効果が得られる。
【0038】
本発明に係るモータ角度検出装置は車両の電動パワーステアリング装置に最適であり、電動パワーステアリング装置の初期診断時、或いはロータが回転していない直進走行時等のタイミングに合わせて、酸化皮膜の破壊動作を実施することが望ましい。
【符号の説明】
【0039】
1、1B 励磁増幅部
2 励磁コイル
3 レゾルバロータ
4 sin検出コイル
5 cos検出コイル
6 sin受信回路
7 cos受信回路
8 コントロールユニット
9 コネクタ
11、12 電圧クランプ回路
801、801B 励磁信号発生部
802、803 A/D変換器
804 判定部
1B1 切換部
1B2、1B3 増幅部
【特許請求の範囲】
【請求項1】
励磁信号により磁束を発生する励磁コイル及び回転角度に応じて検出信号を発生する検出コイルで成るレゾルバと、前記検出信号を入力する受信回路と、前記励磁信号を発生し、前記受信回路からの検出信号及び前記励磁信号に基づいて前記回転角度を演算するコントロールユニットとを備えたモータ角度検出装置において、
前記受信回路の入力側に電圧クランプ回路を設け、検出精度の向上対策が必要なときに前記励磁信号の振幅を大きくする機能を具備していることを特徴とするモータ角度検出装置。
【請求項2】
前記コントロールユニットの励磁信号発生部で前記励磁信号の振幅を大きくするようになっている請求項1に記載のモータ角度検出装置。
【請求項3】
前記励磁信号を増幅する励磁増幅部で通常時より大きい増幅率に切り換えることにより、前記励磁信号を大きくするようになっている請求項1に記載のモータ角度検出装置。
【請求項4】
前記検出精度の向上対策の必要性の判定が判定部で行なわれる請求項1乃至3のいずれかに記載のモータ角度検出装置。
【請求項5】
前記モータのロータが回転していないときに、前記判定部が前記検出精度の向上対策が必要であると判定するようになっている請求項4に記載のモータ角度検出装置。
【請求項6】
前記電圧クランプ部がツェナーダイオードで構成されている請求項1乃至5のいずれかに記載のモータ角度検出装置。
【請求項1】
励磁信号により磁束を発生する励磁コイル及び回転角度に応じて検出信号を発生する検出コイルで成るレゾルバと、前記検出信号を入力する受信回路と、前記励磁信号を発生し、前記受信回路からの検出信号及び前記励磁信号に基づいて前記回転角度を演算するコントロールユニットとを備えたモータ角度検出装置において、
前記受信回路の入力側に電圧クランプ回路を設け、検出精度の向上対策が必要なときに前記励磁信号の振幅を大きくする機能を具備していることを特徴とするモータ角度検出装置。
【請求項2】
前記コントロールユニットの励磁信号発生部で前記励磁信号の振幅を大きくするようになっている請求項1に記載のモータ角度検出装置。
【請求項3】
前記励磁信号を増幅する励磁増幅部で通常時より大きい増幅率に切り換えることにより、前記励磁信号を大きくするようになっている請求項1に記載のモータ角度検出装置。
【請求項4】
前記検出精度の向上対策の必要性の判定が判定部で行なわれる請求項1乃至3のいずれかに記載のモータ角度検出装置。
【請求項5】
前記モータのロータが回転していないときに、前記判定部が前記検出精度の向上対策が必要であると判定するようになっている請求項4に記載のモータ角度検出装置。
【請求項6】
前記電圧クランプ部がツェナーダイオードで構成されている請求項1乃至5のいずれかに記載のモータ角度検出装置。
【図1】


【図2】
【図3】
【図4】
【図7】
【図8】
【図5】
【図6】
【図2】
【図3】
【図4】
【図7】
【図8】
【図5】
【図6】
【公開番号】特開2012−108013(P2012−108013A)
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願番号】特願2010−257472(P2010−257472)
【出願日】平成22年11月18日(2010.11.18)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成24年6月7日(2012.6.7)
【国際特許分類】
【出願日】平成22年11月18日(2010.11.18)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]