
モータ駆動制御装置
【課題】モータを起動させる際、風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供。
【解決手段】回転方向検知部2は、モータ51起動直前の回転方向を検知する。駆動電圧調整部5は、回転方向検知部2により検知されたモータ51起動直前における回転方向に応じて、モータ51起動時の駆動電圧SU1,SV1,SW1が、モータ51が無回転の状態で起動する場合にモータ51に出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整部5は、モータの起動直前の回転方向に応じて、モータ51の回転数を制御するための制御パラメータを、モータ51が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
【解決手段】回転方向検知部2は、モータ51起動直前の回転方向を検知する。駆動電圧調整部5は、回転方向検知部2により検知されたモータ51起動直前における回転方向に応じて、モータ51起動時の駆動電圧SU1,SV1,SW1が、モータ51が無回転の状態で起動する場合にモータ51に出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整部5は、モータの起動直前の回転方向に応じて、モータ51の回転数を制御するための制御パラメータを、モータ51が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータ駆動制御装置、特に、正回転方向または逆回転方向に回転可能なモータを駆動させるための駆動電圧を出力してモータの駆動を制御するモータ駆動制御装置に関する。
【背景技術】
【0002】
近年、圧縮機やファン等の機器を備えた空気調和装置では、これらの機器の動力源としてモータが多く用いられている。そして、空気調和装置には、このモータを駆動させる駆動装置が更に備えられている。
【0003】
ここで、モータが例えば室外ファンの動力源として用いられる場合について説明する。駆動装置がこのモータを起動させようとする際、逆風等の影響により室外ファンに逆回転方向への外力が加わっていると、モータは逆回転方向に回転する。この状態でモータを起動させると、モータには、無風時のように室外ファンに外力が加わっていない状態でモータが正常に起動する場合よりも大きい電流が流れる。特に、この電流は、モータの逆回転側への回転数が高いほど増大する。このように、モータに流れる電流が増大すると、このモータを駆動している駆動装置内の出力回路における発熱量が増え、例えば出力回路を構成しているスイッチング素子が破壊してしまう恐れがある。
【0004】
そこで、特許文献1(特開平8−303386号公報)では、モータ逆回転時の回転数の上限値を設けておき、モータが逆回転方向に回転した際の回転数がこの上限値を超えた場合、モータの回転を停止させるものが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された方法では、例えばモータの起動前から逆風が強い場合、モータの逆回転方向への回転数は起動する前から上限値を超えてしまい、モータは起動できないおそれがある。また、空気調和装置における一空気流路内に、例えば2台のファンが並べて配置されている際に、一方のファンを正回転方向に駆動させると、他方のファンは一方のファンからの風の影響により逆回転方向に回転してしまう場合がある。この現象は、特に、空気調和装置の機内外の静圧差が高い場合に生じやすい。しかし、このような場合も、他方のファンを起動させようとする際に、この他方のファンが一方のファンからの影響を強く受け逆回転していると、他方のファンを駆動するためのモータの回転数は起動する前から上限値を超えてしまうおそれがある。結果、このモータは、起動できなくなってしまう。
【0006】
一方で、例えば順風等の影響によりファンの正回転方向に外力が加わり、起動前から正回転方向に回転している状態のモータを起動させると、駆動装置内の出力回路に供給される直流電圧が昇圧されてしまう、いわゆる昇圧動作が生じる場合がある。これは、モータ起動時のモータの回転数に対して、駆動装置からモータに出力される駆動電圧が小さすぎることに起因して生じる。このように、昇圧動作が生じると、駆動装置内部ではいわゆる過電圧保護機能がはたらき、結果としてモータは正常に起動できなくなる。
【0007】
そこで、本発明は、モータを起動させる際、逆風や順風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供を目的とする。
【課題を解決するための手段】
【0008】
発明1に係るモータ駆動制御装置は、正回転方向または逆回転方向に回転可能なモータを駆動させるための駆動電圧を出力し、モータの駆動を制御する。このモータ駆動制御装置は、回転方向検知手段と駆動電圧調整手段とを備える。回転方向検知手段は、モータ起動直前の回転方向を検知する。駆動電圧調整手段は、モータの起動直前時に回転方向検知手段により検知されたモータの回転方向に応じて、モータ起動時の駆動電圧が、モータが無回転の状態で起動する場合にモータに出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整手段は、モータの起動直前の回転方向に応じて、モータの回転数を制御するための制御パラメータを、モータが無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
【0009】
このモータ駆動制御装置は、モータ起動直前時のモータの回転方向に応じて、制御パラメータを調節することでモータ起動時の駆動電圧のデューティや振幅等を調整し、モータに出力する。これにより、起動直前時、モータには順風や逆風等の影響により既にモータが正方向または逆方向のどちらかに回転している状態において、このモータを起動させる場合であっても、モータ駆動制御装置は、モータを異常停止させることなく確実に起動させることができる。
【0010】
特に、モータの回転数を制御する手段としては、例えばP制御、PI制御及びPID制御等が挙げられる。このモータ駆動制御装置は、起動直前にモータが逆回転方向に回転している場合、例えばPI制御パラメータ等である制御パラメータを、無回転時にモータを起動させる時に用いられる所定制御パラメータとは異なる値にする。これにより、モータ起動時の駆動電圧は調整され、該駆動電圧の有するデューティや振幅は、無回転状態のモータの起動時にモータに出力される所定駆動電圧のデューティや振幅等とは異なった値となる。このように、本発明は、PI制御等の回転数制御を行うモータ駆動制御装置に適用できる。
【0011】
発明2に係るモータ駆動制御装置は、発明1に係るモータ駆動制御装置であって、回転数計測手段を更に備える。回転数計測手段は、モータ起動直前のモータの回転数を計測する。そして、駆動電圧調整手段は、モータ起動直前のモータの回転数に応じて制御パラメータを更に調節することで、モータ起動時の駆動電圧を更に調整する。
【0012】
これにより、起動直前時に既にモータが回転している状態にあっても、このモータ駆動制御装置は、その時々の回転数に応じてモータを起動させるためにモータに出力する駆動電圧を調整するため、モータをより確実に起動させることができる。
【0013】
発明3に係るモータ駆動制御装置は、発明1または2に係るモータ駆動制御装置であって、駆動電圧調整手段は、モータ起動直前のモータの回転数が逆回転方向である場合、駆動電圧が所定駆動電圧よりも小さくなるように、制御パラメータを所定制御パラメータよりも小さくなるよう調節する。
【0014】
このモータ駆動制御装置は、例えば逆風等の影響を受けてモータが起動直前時に逆回転方向に回転している場合、制御パラメータを所定制御パラメータよりも小さくなるよう調節することで、このモータを起動させるためにモータに出力する駆動電圧のデューティや振幅等を、所定駆動電圧よりも小さくする。これにより、モータ駆動制御装置は、起動直前に例えば逆回転しているモータを起動させた場合、モータに通電される電流量を抑えることができる。
【0015】
発明4に係るモータ駆動制御装置は、発明3に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータの起動直前の回転数に応じて、制御パラメータを所定制御パラメータよりも小さくなるように調節する。
【0016】
このモータ駆動制御装置は、例えば逆風等の影響を受けて起動直前にモータが逆回転方向に回転している場合、制御パラメータを所定制御パラメータよりも小さくなるように調節する。これにより、無回転状態のモータの起動時にモータに出力される所定駆動電圧よりも、デューティや振幅等が小さい駆動電圧がモータに出力される。このように、例えば逆方向に回転しているモータを起動させる場合等に、モータに通電される電流量を抑えることができる。
【0017】
発明5に係るモータ駆動制御装置は、発明4に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧のデューティが所定駆動電圧のデューティより小さくなるように、制御パラメータを所定制御パラメータよりも小さくなるよう調節する。
【0018】
このモータ駆動制御装置としては、例えばモータをPWM(Pulse-Width Modulation)制御するものが挙げられる。モータ駆動制御装置は、例えば逆風等の影響を受けてモータが起動直前時に逆回転方向に回転している場合、このモータを起動させるための駆動電圧のデューティを所定駆動電圧のデューティよりも小さくする。これにより、起動直前に逆回転しているモータを起動させた場合、モータに通電される電流量はより抑えられる。
【0019】
発明6に係るモータ駆動制御装置は、発明4または5に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧の振幅を所定駆動電圧の振幅より小さくなるように、制御パラメータを所定制御パラメータよりも小さくなるよう調節する。
【0020】
このモータ駆動制御装置としては、例えばモータをPAM(Pulse-Amplitude Modulation)制御するものが挙げられる。モータ駆動制御装置は、例えば逆風等の影響を受けてモータが起動直前に逆回転方向に回転している場合、このモータを起動させるための駆動電圧の振幅を所定駆動電圧の振幅よりも小さくする。これにより、起動直前に逆回転しているモータを起動させた場合、モータに通電される電流量はより抑えられる。
【0021】
発明7に係るモータ駆動制御装置は、発明1または2に係るモータ駆動制御装置であって、駆動電圧調整手段は、モータ起動直前のモータの回転数が逆回転方向である場合、駆動電圧が所定駆動電圧よりも大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0022】
起動直前に正回転しているモータを起動させる際だけでなく、逆風等の影響を受けて逆回転しているモータをモータ駆動制御装置が起動させた際においても、モータ駆動制御装置内の駆動電圧調整手段に供給される直流電圧に昇圧動作が生じてしまう場合がある。そこで、このモータ駆動制御装置は、例えば順風や逆風等の影響を受けて起動直前にモータが正回転または逆回転方向に回転している場合、制御パラメータを所定制御パラメータよりも大きくなるよう調節することで、このモータを起動させるためにモータに出力する駆動電圧のデューティや振幅等を、所定駆動電圧より大きくする。これにより、起動直前に逆回転しているモータを起動させた場合に、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を防ぐことができる。
【0023】
発明8に係るモータ駆動制御装置は、発明7に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前時の回転数に応じて、制御パラメータを所定制御パラメータよりも大きくなるように調節する。
【0024】
このモータ駆動制御装置は、起動直前にモータが正回転または逆回転方向に回転している場合、制御パラメータを所定制御パラメータよりも大きくなるように調節する。これにより、正方向や逆方向に回転しているモータを起動させる場合に、直流電圧の昇圧動作が生じることを防ぐことができる。
【0025】
発明9に係るモータ駆動制御装置は、発明8に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧のデューティが所定駆動電圧のデューティより大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0026】
このモータ駆動制御装置は、起動直前に逆回転方向に回転しているモータを起動させる時に、モータに出力する駆動電圧のデューティを、所定駆動電圧よりも大きくする。これにより、モータが起動直前に逆回転している状態からモータを起動させた場合に、電源からの直流電圧の昇圧動作が生じることを防ぐことができる。
【0027】
発明10に係るモータ駆動制御装置は、発明8または9に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧の振幅が所定駆動電圧の振幅より大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0028】
これにより、モータが起動直前に逆回転している状態からモータを起動させた場合に、直流電圧の昇圧動作が生じることをより防ぐことができる。
【0029】
発明11に係るモータ駆動制御装置は、発明1または2に係るモータ駆動制御装置であって、駆動電圧調整手段は、モータ起動直前のモータの回転数が正回転方向である場合、駆動電圧が所定駆動電圧よりも大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0030】
これにより、例えば順風等の影響を受けて起動直前に正回転しているモータを起動させた場合に、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を、より防ぐことができる。
【0031】
発明12に係るモータ駆動制御装置は、発明11に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、制御パラメータを所定制御パラメータよりも大きくなるように調節する。
【0032】
これにより、例えば順風等の影響を受けて起動直前に正回転しているモータを起動させた場合に、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を、より防ぐことができる。
【0033】
発明13に係るモータ駆動制御装置は、発明12に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧のデューティが所定駆動電圧のデューティより大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0034】
このモータ駆動制御装置は、モータが起動直前に正回転方向に回転している場合、制御パラメータを所定制御パラメータよりも大きくなるよう調節することで、このモータを起動させるための駆動電圧のデューティを所定駆動電圧のデューティよりも大きくする。これにより、起動直前に正回転しているモータを起動させた場合に、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を、より防ぐことができる。
【0035】
発明14に係るモータ駆動制御装置は、発明12または13に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧の振幅が所定駆動電圧の振幅より大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0036】
このモータ駆動制御装置は、モータが起動直前に正回転方向に回転している場合、制御パラメータを所定制御パラメータよりも大きくなるよう調節することで、このモータを起動させるための駆動電圧の振幅を所定駆動電圧の振幅よりも大きくする。これにより、起動直前に正回転しているモータを起動させた場合に、例えば駆動電圧調整手段に供給される直流電圧が昇圧される現象を、より防ぐことができる。
【0037】
発明15に係るモータ駆動制御装置は、発明3〜14のいずれかに係るモータ駆動制御装置であって、計測手段を更に備える。計測手段は、モータが起動してからの時間を計測する。そして、計測手段により計測されている時間が所定時間を経過した場合、駆動電圧調整手段は、制御パラメータがモータ通常回転時の制御パラメータとなるように調節することで、駆動電圧をモータの通常回転時の駆動電圧に変更する。
【0038】
このモータ駆動制御装置によると、所定時間経過後、モータには通常回転時の駆動電圧が出力される。従って、モータは確実に通常回転を行うことができる。
【0039】
発明16に係るモータ駆動制御装置は、発明3〜14のいずれかに係るモータ駆動制御装置であって、モータの起動後、モータの正回転側への回転数が第1所定数以上となった場合、駆動電圧調整手段は、制御パラメータがモータ通常回転時の制御パラメータとなるように調節することで、駆動電圧をモータの通常回転時の駆動電圧に変更する。
【0040】
このモータ駆動制御装置によると、モータの正回転側への回転数が第1所定数以上となった場合、モータには通常回転時の駆動電圧が出力される。従って、モータは確実に通常回転を行うことができる。
【0041】
発明17に係るモータ駆動制御装置は、発明3〜10のいずれかに係るモータ駆動制御装置であって、モータ起動後、モータの逆回転側への回転数が第2所定数以下となった場合、駆動電圧調整手段は、制御パラメータがモータ通常回転時の制御パラメータとなるように調節することで、駆動電圧をモータの通常回転時の駆動電圧に変更する。
【0042】
このモータ駆動制御装置によると、起動直前にモータが逆回転方向に回転している状態でモータを起動させた際に、モータの逆回転側への回転数が第2所定数以下となると、モータには通常回転時の駆動電圧が出力される。従って、モータは確実に通常回転を行うことができる。
【0043】
発明18に係るモータ駆動制御装置は、発明3〜14のいずれかに係るモータ駆動制御装置であって、駆動電圧調整手段は、モータの回転数及び回転方向に応じて、制御パラメータがモータ通常回転時の制御パラメータに近づくように調節することで、駆動電圧がモータの通常回転時の駆動電圧に近づくようにする。
【0044】
これにより、駆動電圧のデューティや振幅等は、モータの回転数及び回転方向に応じてモータの通常回転時に出力される駆動電圧に近づく。従って、モータは徐々に通常回転を行うようになる。
【0045】
発明19に係るモータ駆動制御装置は、発明1〜18のいずれかに係るモータ駆動制御装置であって、駆動電圧調整手段は、モータの回転数について、P制御、PI制御及びPID制御のうちいずれか1つの制御を行う。
【0046】
これにより、モータ駆動制御装置は、モータを的確に制御することができる。
【0047】
発明20に係るモータ駆動制御装置は、発明1〜19のいずれかに係るモータ駆動制御装置であって、モータはファンモータである。
【0048】
これにより、例えばファンモータの運転停止後に、ファンモータに接続されたファンの慣性により回転が継続した状態からファンモータを再起動させた場合や、逆風や順風の影響を受けて正回転または逆回転方向に回転しているファンモータを起動させた場合であっても、モータ駆動制御装置は、確実にファンモータの回転制御を行うことができる。これにより、ファンモータは的確な回転を行うことができる。
【0049】
発明21に係るモータ駆動制御装置は、発明20に係るモータ駆動制御装置であって、ファンモータは、空気調和装置の室外機に用いられる室外機用ファンモータである。
【0050】
室外機用では、逆風や順風等による外乱が大きい。そこで、本発明のモータ駆動制御装置を、室外機用ファンモータを回転駆動させるために用いることで、外乱が大きい場合であっても、室外機用ファンモータはより確実に回転することができる。
【0051】
発明22に係るモータ駆動制御装置は、発明1〜21のいずれに係るモータ駆動制御装置であって、モータはブラシレスDCモータである。
【0052】
逆風や順風等の影響を受けて回転しているモータを起動させる時に、直流電圧が昇圧される現象が生じる場合があるが、本発明のモータ駆動制御装置を、ブラシレスDCモータを回転駆動させるために用いることで、直流電圧が昇圧される現象をより防止することができる。
【発明の効果】
【0053】
発明1に係るモータ駆動制御装置によると、モータの起動直前時、例えば風等の外力によりモータが正方向または逆方向のどちらかに既に回転している状態にあり、このモータを起動させる場合であっても、モータ駆動制御装置は、モータを異常停止させることなく確実に起動させることができる。特に、モータ起動時の駆動電圧は調整され、該駆動電圧の有するデューティや振幅は、無回転状態のモータの起動時にモータに出力される所定駆動電圧のデューティや振幅等とは異なった値となる。このように、本発明は、PI制御等の回転数制御を行うモータ駆動制御装置に適用できる。
【0054】
発明2に係るモータ駆動制御装置によると、モータをより確実に起動させることができる。
【0055】
発明3〜6に係るモータ駆動制御装置によると、モータに通電される電流量を抑えることができる。
【0056】
発明7〜14に係るモータ駆動制御装置によると、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を、防ぐことができる。
【0057】
発明15〜17に係るモータ駆動制御装置によると、モータは確実に通常回転を行うことができる。
【0058】
発明18に係るモータ駆動制御装置によると、モータの回転数が高くなる程、駆動電圧のデューティや振幅等はモータの通常回転時に出力される駆動電圧に近づく。従って、モータは徐々に通常回転を行うようになる。
【0059】
発明19に係るモータ駆動制御装置によると、モータを的確に制御することができる。
【0060】
発明20に係るモータ駆動制御装置によると、モータ駆動制御装置は、確実にファンモータの回転制御を行うことができる。従って、ファンモータは的確な回転を行うことができる。
【0061】
発明21に係るモータ駆動制御装置によると、外乱が大きい場合であっても、室外機用ファンモータはより確実に回転することができる。
【0062】
発明22に係るモータ駆動制御装置によると、直流電圧が昇圧される現象をより防止することができる。
【図面の簡単な説明】
【0063】
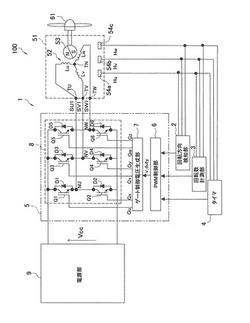
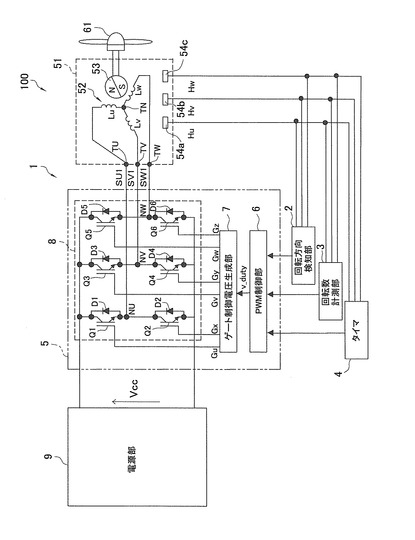
【図1】第1実施形態に係るモータの駆動制御システム全体の構成とモータ駆動制御装置の内部構成とを示したブロック図。
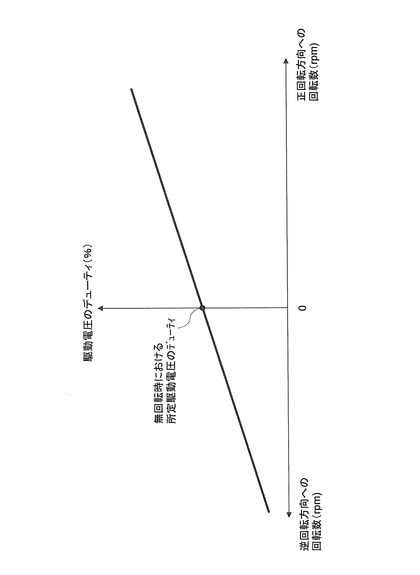
【図2】第1実施形態に係るモータ起動直前時の各回転方向における回転数と、モータを起動する時にモータに出力される駆動電圧のデューティとの関係を示す概念図。
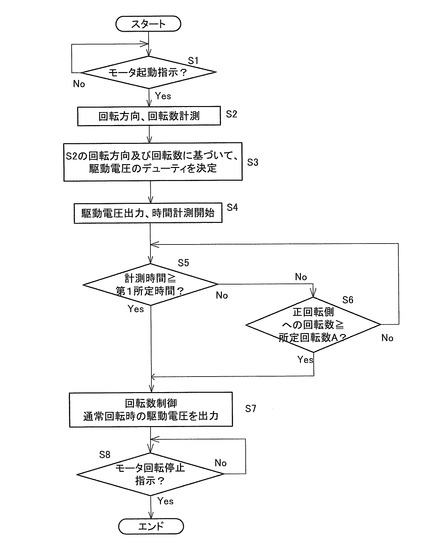
【図3】第1実施形態に係るモータ駆動制御装置が行う一連の動作の流れを説明するためのフローチャート。
【図4】第1実施形態に係るモータ駆動制御装置が、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図5】第1実施形態に係るモータ駆動制御装置が、正方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図6】第2実施形態に係るモータの駆動制御システム全体の構成とモータ駆動制御装置の内部構成とを示したブロック図。
【図7】第2実施形態に係るモータ起動直前時の各回転方向における回転数と、モータを起動する時に用いられるPI制御パラメータとの関係を示す概念図。
【図8】第2実施形態に係るモータ駆動制御装置が行う一連の動作の流れを説明するためのフローチャート。
【図9】PI制御動作の流れを説明するためのフローチャート。
【図10】第2実施形態に係るモータ駆動制御装置が、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図11】第2実施形態に係るモータ駆動制御装置が、正方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図12】その他の実施形態(a)に係るモータの駆動制御システム全体の構成とモータ駆動制御装置の内部構成とを示したブロック図。
【図13】その他の実施形態(c)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図14】その他の実施形態(d)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図15】その他の実施形態(e)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図16】その他の実施形態(f)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図17】その他の実施形態(g)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【発明を実施するための形態】
【0064】
<第1実施形態>
(1)全体及びモータの構成
図1は、モータ51と、このモータ51の駆動を制御するためのモータ駆動制御装置1とを含むモータの駆動制御システム100全体の構成図である。ここで、モータの種類としては、一般的には直流モータや交流モータ、ステッピングモータ、ブラシレスDCモータ等が挙げられるが、本実施形態では、モータ51がブラシレスDCモータである場合を例にとる。
【0065】
モータ51は、空気調和装置の室外機におけるプロペラファン61の駆動源として用いられる室外機用ファンモータであって、ステータ52と、ロータ53と、3つのホール素子54a,54b,54cとを備えている。
【0066】
ステータ52は、スター結線されたU相、V相及びW相の駆動コイルLu,Lv,Lwを含む。U相、V相及びW相の駆動コイルLu,Lv,Lwの一方端はそれぞれU相、V相及びW相の駆動コイル端子TU,TV,TWに接続され、これらの他方端は全て端子TNに接続されている。これら3相の駆動コイルLu,Lv,Lwは、ロータ53が回転することによりその回転速度とロータ53の位置に応じた誘起電圧を発生させる。
【0067】
ロータ53は、N極及びS極からなる2極の永久磁石を含み、ステータ52に対し回転軸を中心として回転する。ロータ53の回転は、この回転軸と同一軸心上にある出力軸(図示せず)を介してプロペラファン61に出力される。
【0068】
3つのホール素子54a〜54cは、ステータ52に対するロータ53の位置を、ロータ53の永久磁石の極性に基づいて検出するものであって、検出後のロータ53の位置を示す位置検出信号Hu,Hv,Hwをモータ駆動制御装置1に出力する。
【0069】
(2)モータ駆動制御装置の構成
次いで、本実施形態に係るモータ駆動制御装置1の構成について説明する。本実施形態のモータ駆動制御装置1は、図1に示すように、回転方向検知部2、回転数計測部3、タイマ4(第1計測手段に相当)、駆動電圧調整部5及び電源部9を備える。
【0070】
〔回転方向検知部〕
回転方向検知部2は、各ホール素子54a〜54cから出力される位置検出信号Hu,Hv,Hwを用いて、モータ51におけるロータ53の回転方向を検知する。以下より、説明を簡単にするため、モータ51におけるロータ53の回転方向を、単に“モータ51の回転方向”と記載する。
【0071】
尚、検知されたモータ51の回転方向は、駆動電圧調整部5に取り込まれる。
【0072】
〔回転数計測部〕
回転数計測部3は、各ホール素子54a〜54cから出力される位置検出信号Hu,Hv,Hwを用いて、モータ51におけるロータ53の回転数を計測する。以下より、説明を簡単にするため、モータ51の回転方向と同様、モータ51におけるロータ53回転数を、単に“モータ51の回転数”と記載する。
【0073】
尚、計測されたモータ51の回転数は、駆動電圧調整部5に取り込まれる。
【0074】
〔タイマ〕
タイマ4は、モータ51が起動してからの時間を計測する。計測された時間は、モータ51の回転方向及び回転数と同様に、駆動電圧調整部5に取り込まれる。
【0075】
〔駆動電圧調整部〕
駆動電圧調整部5は、モータ51をPWM(Pulse-Width Modulation)制御するための駆動電圧SU1,SV1,SW1を生成してモータ51に出力するためのものであって、PWM制御部6、ゲート制御電圧生成部7及び出力回路8を備える。
【0076】
〔PWM制御部〕
PWM制御部6は、モータ51の回転方向及び回転数に基づいて、各駆動コイルLu,Lv,Lwに印加される駆動電圧SU1,SV1,SW1のデューティを決定し、このデューティを示すPWMデューティ電圧v_dutyを、ゲート制御電圧生成部7に出力する。特に、本実施形態に係るPWM制御部6は、逆風や順風等の影響をプロペラファン61が受け、このプロペラファン61の影響により正方向や逆方向に外力が加わって回転している状態のモータ51を起動させる場合、起動直前におけるモータ51の回転方向及び回転数に基づいて、駆動電圧SU1,SV1,SW1のデューティを決定する。
【0077】
以下に、本実施形態に係るPWM制御部6が、モータ51を起動させる時に、駆動電圧SU1,SV1,SW1のデューティをどのように決定するかについて説明する。具体的には、PWM制御部6は、モータ51を起動させる時、先ずはモータ51起動直前、即ち現在のモータ51の回転方向及び回転数を回転方向検知部2及び回転数計測部3からそれぞれ取得し、次いで取得した回転方向及び回転数を図2に当てはめることで、駆動電圧SU1,SV1,SW1のデューティを決定する。図2は、モータ51起動直前におけるモータ51の各回転方向への回転数(rpm)と、モータ51起動時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティ(%)との関係を示している。図2によると、モータ51起動直前におけるモータ51の回転方向が逆回転方向である場合、モータ51を起動する時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティは、モータ51が無回転状態で起動する場合にモータ51に出力される所定駆動電圧のデューティよりも低い。特に、モータ51起動直前におけるモータ51の逆回転方向への回転数が多い程、モータ51を起動する時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティはより低くなっている。逆に、モータ51起動直前におけるモータ51の回転方向が正回転方向である場合、モータ51を起動する時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティは、所定駆動電圧のデューティよりも高い。特に、モータ51起動直前におけるモータ51の正回転方向への回転数が多い程、モータ51を起動する時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティはより高くなっている。
【0078】
ここで、モータ51が無回転状態で起動する場合としては、モータ51により駆動されるプロペラファン61が逆風や順風等の外力の影響を受けていない、いわゆる無風状態において、モータ51が起動する場合が挙げられる。従って、仮にモータ51を起動させる時に、モータ51起動直前における回転数が“0rpm”であれば、モータ51は無回転状態から起動したことになり、PWM制御部6は、モータ51を起動させるための駆動電圧SU1,SV1,SW1のデューティを、所定駆動電圧のデューティと決定する。尚、所定駆動電圧のデューティは、モータ51の音や振動などを考慮して決定されることができる。尚、駆動電圧SU1,SV1,SW1のデューティは、必ずしも一定値である必要はなく、例えば正弦波変調されていてもよいことは、言うまでもない。
【0079】
図2によると、逆風等の影響でプロペラファン61に逆回転方向への外力が加わったため、モータ51が逆回転方向に回転している場合、PWM制御部6は、モータ51の逆回転側への回転数に応じて、モータ51を起動させる時の駆動電圧SU1,SV1,SW1のデューティを所定駆動電圧のデューティより小さくなるように決定する。逆に、順風等の影響でプロペラファン61に正回転方向への外力が加わったため、モータ51が正回転方向に回転している場合、PWM制御部6は、モータ51の正回転側への回転数に応じて、モータ51を起動させる時の駆動電圧SU1,SV1,SW1のデューティを所定駆動電圧のデューティより大きくなるように決定する。尚、駆動電圧SU1,SV1,SW1のデューティは、図2では回転数に応じてリニアに変化しているが、これに限定されず、一部或いは全領域において段階的に変化してもよい。
【0080】
また、PWM制御部6は、モータ51の起動後、モータ51の回転数やタイマ4の計測時間が所定の条件を満たした場合には、駆動電圧SU1,SV1,SW1のデューティをモータ51の通常回転時における駆動電圧のデューティに変更する。ここで、所定の条件としては、例えば以下のものが挙げられる。
(I)タイマ4による計測時間が第1所定時間を経過した場合。
(II)モータ51の正回転側への回転数が所定回転数A(第1所定数に相当)以上となった場合。
(III)逆回転方向に回転しているモータ51を起動させた後、モータ51の回転が正回転側に切り替わった場合(即ち、回転数が“0rpm”となった場合)
尚、本実施形態では、以下より、所定の条件(I)及び(II)が満たされる場合について説明する。
【0081】
〔ゲート制御電圧生成部〕
ゲート制御電圧生成部7は、PWM制御部6により決定されたデューティを有する駆動電圧SU1,SV1,SW1が出力回路8からモータ51に出力されるように、出力回路8を制御する。より具体的には、ゲート制御電圧生成部7は、PWM制御部6から出力されたPWMデューティ電圧v_dutyに基づいて、絶縁ゲート型バイポーラトランジスタQ1〜Q6のオン及びオフを制御するためのゲート制御電圧Gu,Gx,Gv,Gy,Gw,Gzを生成する。生成されたゲート制御電圧Gu,Gx,Gv,Gy,Gw,Gzは、絶縁ゲート型バイポーラトランジスタQ1〜Q6の各ゲート端子に印加される。
【0082】
〔出力回路〕
出力回路8は、ゲート制御電圧Gu,Gx,Gv,Gy,Gw,Gzに基づいて駆動電圧SU1,SV1,SW1を出力するものであって、絶縁ゲート型バイポーラトランジスタQ1〜Q6(以下、単にトランジスタという)と還流用のダイオードD1〜D6とを含む。トランジスタQ1及びQ2、Q3及びQ4、Q5及びQ6は、電源配線とGNDのラインとの間に直列に接続されている。トランジスタQ1及びQ2、Q3及びQ4、Q5及びQ6の間の各接続点NU,NV,NWは、それぞれモータ51のU相、V相及びW相の駆動コイル端子TU,TV,TWに接続されている。ダイオードD1〜D6は、各トランジスタQ1〜Q6に逆電圧が印加された場合に導通するような特性を有しており、各トランジスタQ1〜Q6に並列に接続されている。
【0083】
このような構成を有する出力回路9によると、トランジスタQ1〜Q6が各ゲート端子に印加されるゲート制御電圧Gu,Gx,Gv,Gy,Gw,Gzに基づいてオン及びオフすることで、PWM制御部6により決定されたデューティを有する駆動電圧SU1,SV1,SW1は、各駆動コイルLu,Lv,Lwに出力される。
【0084】
〔電源部〕
電源部9は、交流電圧を直流に変換し、電源配線を介して出力回路8に供給する直流電圧Vccを生成する。尚、このような電源部9内部には、駆動電圧SU、SV,SWのデューティやモータ51の回転数等に応じて直流電圧Vccを変更する機能部等が含まれている。このような機能部としては、例えば電圧調整回路や昇圧回路が挙げられる。
【0085】
(3)モータ駆動制御装置の動作
(3−1)一連の動作の流れ
図3は、モータ駆動制御装置1が行う一連の動作の流れを説明するためのフローチャートである。
【0086】
ステップS1〜2:モータ駆動制御装置1は、例えば空気調和装置の室外機等の、モータ駆動制御装置1の外部からモータ51の起動指示を取得すると(S1)、回転方向検知部2及び回転数計測部3は、モータ51起動直前のモータ51の回転方向及び回転数をそれぞれ検知及び計測する(S2)。
【0087】
ステップS3〜4:駆動電圧調整部5のPWM制御部6は、ステップS2で検知及び計測されたモータ51の回転方向及び回転数を図2に当てはめ、モータ51を起動するためにモータ51に出力する駆動電圧SU1,SV1,SW1のデューティを決定する(S3)。例えば、ステップS2で検知したモータ51の回転方向が逆回転である場合、PWM制御部6は、駆動電圧SU1,SV1,SW1のデューティを所定駆動電圧のデューティ以下に決定し、逆にモータ51の回転方向が正回転である場合、PWM制御部6は、駆動電圧SU1,SV1,SW1のデューティを所定駆動電圧のデューティ以上に決定する。このようにして決定されたデューティを有する駆動電圧SU1,SV1,SW1は、ゲート制御電圧生成部7及び出力回路8を経てモータ51内の各駆動コイルLu,Lv,Lwに出力される(S4)。これにより、モータ51は起動する。そして、タイマ4は、時間の計測を開始する。
【0088】
ステップS5〜7:タイマ4の計測時間、モータ51の回転数及び回転方向が所定の条件を満たした場合、モータ駆動制御装置1は、モータ51について回転数制御を行う。より具体的には、駆動電圧SU1,SV1,SW1のデューティは、回転数制御により通常回転時の駆動電圧のデューティとなるように決定され、このように決定されたデューティを有する駆動電圧SU1,SV1,SW1は、ゲート制御電圧生成部7及び出力回路8を経てモータ51内の各駆動コイルLu,Lv,Lwに出力される(S7)。ここで、所定の条件には、(I)タイマ4の計測時間が第1所定時間を経過した場合(S5)、(II)モータ51の正転側への回転数が所定回転数Aとなった場合(S6)が該当する。尚、タイマ4の計測時間、モータ51の回転数及び回転方向が、ステップS5またはS6におけるいずれの所定の条件をも満たさない場合、モータ駆動制御装置1は、ステップS5以降の動作を繰り返す。また、回転数制御の方法としては、P(Proportional)制御、PI(Proportional and Integral)制御、PID(Proportional, Integral and Derivative)制御などが挙げられる。
【0089】
ステップS8:モータ駆動制御装置1は、モータ51の回転停止指示を空気調和装置の室外機等のモータ駆動制御装置1外部から取得するまで、モータ51について回転数制御を行う(S8)。尚、モータ駆動制御装置1は、モータ51の回転停止指示を取得した場合、モータ51の回転を停止させ、一連の動作を終了する。
【0090】
(3−2)調節された駆動電圧のデューティ及び回転数の一例
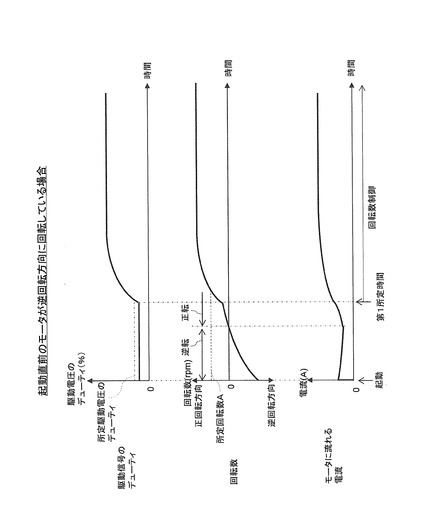
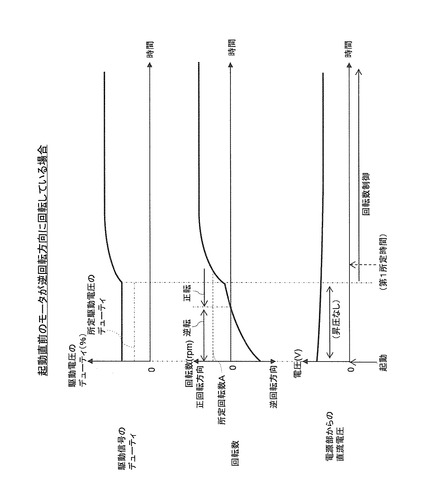
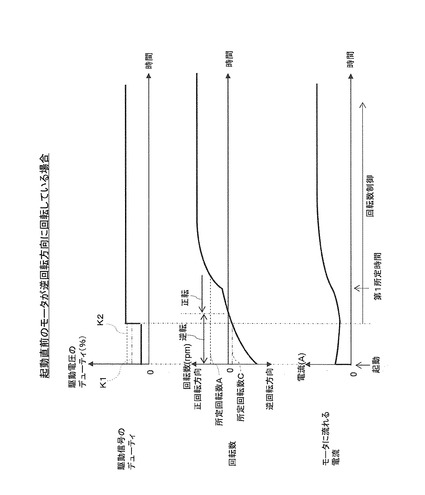
モータ駆動制御装置1が上記動作の流れでモータ51を駆動制御した場合の一例を、図4及び図5に示す。図4は、起動前から逆方向に回転しているモータ51を起動させた場合の、経時的に変化する駆動電圧SU1,SV1,SW1のデューティ、モータ51の回転数及びモータ51内の駆動コイルLu,Lv,Lwに流れる電流を示した図である。図5は、起動前から正方向に回転しているモータ51を起動させた場合の、経時的に変化する駆動電圧SU1,SV1,SW1のデューティ、モータ51の回転数、及び電源部9からの直流電圧を示した図である。
【0091】
図4に示すように、逆風等の影響によりモータ51が起動前から逆方向に回転している場合、モータ駆動制御装置1は、所定駆動電圧のデューティよりも低いデューティを有する駆動電圧SU1,SV1,SW1をモータ51に出力し、モータ51を起動させる。これにより、モータ51が逆回転状態から起動することによりモータ51の駆動コイルLu,Lv,Lwに過渡的に流れる電流は抑制される。やがて、モータ51の回転方向は正回転となる。
【0092】
ここで、図4では、モータ51の正転側の回転数が所定回転数Aに至るよりも先に、タイマ4による計測時間が第1所定時間を経過している。従って、モータ駆動制御装置1は、第1所定時間経過時に、駆動電圧SU1,SV1,SW1のデューティを通常回転時のデューティに変更し、その後回転数制御を行っている。これにより、モータ駆動制御装置1は、モータ51の駆動コイルLu,Lv,Lwに過渡的に流れる電流を抑えながら、モータ51の回転数を所望の回転数にすることができる。
【0093】
また、図5に示すように、順風等の影響によりモータ51が起動前から正方向に回転している場合、モータ駆動制御装置1は、所定駆動電圧のデューティよりも高いデューティを有する駆動電圧SU1,SV1,SW1をモータ51に出力し、モータ51を駆動させる。これにより、モータ51に出力される駆動電圧のデューティがこの回転数において本来出力されるべき駆動電圧のデューティよりも低いために出力回路8に供給される直流電圧Vccが昇圧してしまう現象は抑制される。その後、モータ51の回転数は徐々に上昇していく。
【0094】
ここで、図5では、タイマ4による計測時間が第1所定時間を経過するよりも先に、モータ51の正転側の回転数が所定回転数Aに至っている。従って、モータ駆動制御装置1は、モータ51の回転数が所定回転数Aとなった時に、駆動電圧SU1,SV1,SW1のデューティを通常回転時のデューティに変更し、その後回転数制御を行っている。これにより、モータ駆動制御装置1は、直流電圧Vccが昇圧することなく、モータ51の回転数を所望の回転数にすることができる。
【0095】
(4)効果
このモータ駆動制御装置1は、モータ起動直前時のモータ51の回転方向に応じて、モータ51を起動させるための駆動電圧SU1,SV1,SW1のデューティや振幅等を、モータ51が無回転状態で起動する場合と異なるように調整し、モータに出力する。これにより、起動直前時、モータ51には外力が加わっており、既にモータ51が正方向または逆方向のどちらかに回転している状態において、このモータ51を起動させる場合であっても、モータ駆動制御装置1は、モータ51を異常停止させることなく確実に起動させることができる。
【0096】
また、このモータ駆動制御装置1は、モータ51の回転方向に加え、モータ起動直前時のモータ51の回転数に応じて、駆動電圧SU1,SV1,SW1を更に調整する。これにより、モータ駆動制御装置1は、モータ51をより確実に起動させることができる。
【0097】
特に、モータ駆動制御装置1は、PWM制御により、逆風等の影響を受けて逆回転方向に回転している状態のモータ51を起動させる場合には、モータ51が無回転の状態で起動する場合の所定駆動電圧よりも小さいデューティを有する駆動電圧SU1,SV1,SW1を出力する。これにより、モータ51の起動時にモータ51に過渡的に流れる電流量を抑えることができる。
【0098】
そして、モータ駆動制御装置1は、PWM制御により、順風等の影響を受けて正回転方向に回転している状態のモータ51を起動させる場合には、モータ51が無回転の状態で起動する場合の所定駆動電圧よりも大きいデューティを有する駆動電圧SU1,SV1,SW1を出力する。これにより、モータ51が起動した際に直流電圧Vccが昇圧される現象を防ぐことができる。
【0099】
また、逆回転または正回転方向に回転している状態のモータ51を起動させてから第1所定時間経過後、モータ駆動制御装置1は、通常回転時のデューティを有する駆動電圧SU1,SV1,SW1をモータ51に出力する。これにより、モータ51は確実に通常回転を行うことができる。
【0100】
また、モータ51の起動後、モータ51の正転側への回転数が所定回転数A以上となった場合、モータ駆動制御装置1は、通常回転時のデューティを有する駆動電圧をモータ51に出力する。これにより、モータ51は確実に通常回転を行うことができる。
【0101】
<第2実施形態>
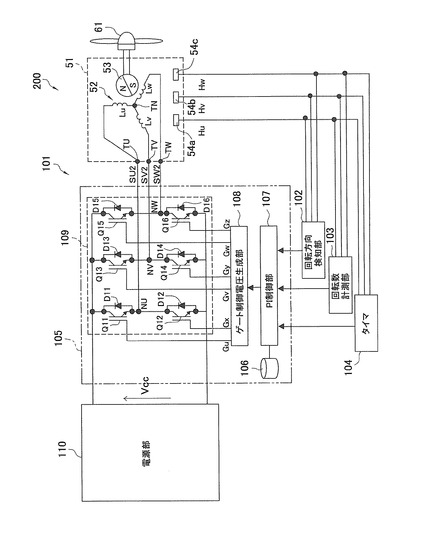
図6は、第2実施形態に係るモータ駆動制御装置101と、このモータ駆動制御装置101により駆動制御されるモータ51とを含むモータの駆動制御システム200全体の構成図である。
【0102】
ここで、本実施形態に係るモータ51は、第1実施形態のモータ51と同様の構成を有しているため、図1と同一の符号を付している。即ち、モータ51は、第1実施形態と同様、空気調和装置の室外機におけるプロペラファン61の駆動源として用いられる室外機用ファンモータであって、ステータ52と、ロータ53と、3つのホール素子54a〜54cとを備えた3相のブラシレスDCモータの構成を有している。
【0103】
(1)モータ駆動制御装置の構成
モータ駆動制御装置101は、回転方向検知部102、回転数計測部103、タイマ104(第2計測手段に相当)、駆動電圧調整部105及び電源部110を備える。ここで、本実施形態に係る駆動電圧調整部105は、モータ51の回転数制御を行い、駆動電圧SU2,SV2,SW2を生成してモータ51内の駆動コイルLu,Lv,Lwに出力する。ここで、モータ51の回転数制御の方法としては、P制御、PI制御、PID制御などが挙げられるが、本実施形態では、駆動電圧調整部105がモータ51の回転数についてPI制御を行う場合を例にとる。また、駆動電圧調整部105は、記憶部106、PI制御部107、ゲート制御電圧生成部108及び出力回路109を備える。
【0104】
尚、回転方向検知部102、回転数計測部103、タイマ104、ゲート制御電圧生成部108、出力回路109及び電源部110については、第1実施形態で同じ名称を付して示した図1に係る回転方向検知部2、回転数計測部3、タイマ4、ゲート制御電圧生成部7、出力回路8及び電源部9と同様の構成を有するため、詳細な説明を省略する。
【0105】
以下より、本実施形態の一特徴である記憶部106及びPI制御部107について説明する。
【0106】
記憶部106には、PI制御部107により実行されるプログラムが記憶されている。また記憶部106は、PI制御部107により調節された各種PI制御パラメータ等を記憶することができる。ここで、PI制御パラメータとしては、現時点での回転数と指令回転数との偏差を増幅させる際に用いられる比例パラメータ、回転数の偏差の累積値を積分する際に用いられる積分パラメータ、及び回転数の偏差の上限値を示す偏差制限値等が挙げられる。指令回転数は、例えば空気調和装置の室外機等の、モータ駆動制御装置101外部から入力されるものである。
【0107】
PI制御部107は、CPUを含むマイクロコンピュータからなり、モータ51の回転方向や回転数に基づいて各種PI制御パラメータを調節する。そして、PI制御部107は、調節された各種PI制御パラメータに基づいて、モータ51の回転数をPI制御する。より具体的には、PI制御部107は、調節されたPI制御パラメータに基づいて駆動電圧SU2,SV2,SW2のデューティを決定し、このデューティを示すPWMデューティ電圧v_dutyをゲート制御電圧生成部108に出力する。
【0108】
ここで、PI制御パラメータと駆動電圧SU2,SV2,SW2のデューティとは、相関関係にある。従って、PI制御パラメータが小さい程、駆動電圧SU2,SV2,SW2のデューティは小さくなる。逆に、PI制御パラメータが大きい程、駆動電圧SU2,SV2,SW2のデューティは大きくなる。
【0109】
〔PI制御パラメータの調節〕
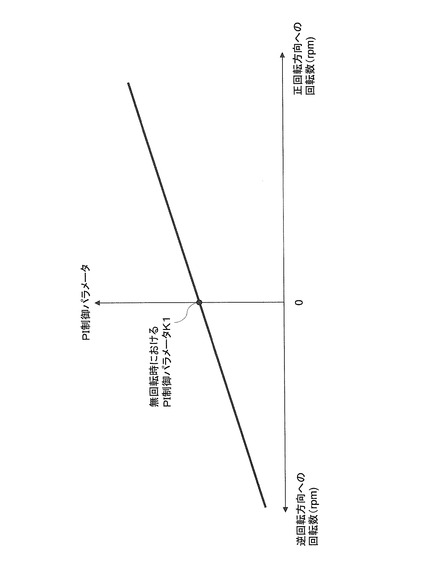
以下に、本実施形態に係るPI制御部107が、モータ51を起動させる時に、PI制御パラメータをどのように調節するかについて説明する。PI制御部107は、モータ51を起動させる時、先ずはモータ51起動直前、即ち現在のモータ51の回転方向及び回転数を回転方向検知部2及び回転数計測部3からそれぞれ取得し、次いで取得した回転方向及び回転数を図7に当てはめ、PI制御パラメータを決定する。図7は、モータ51起動直前におけるモータ51の各回転方向への回転数(rpm)と、モータ51を起動する時に用いられるPI制御パラメータとの関係を示している。図7によると、モータ51起動直前におけるモータ51の回転方向が逆回転方向である場合、モータ51を起動する時に用いられるPI制御パラメータは、モータ51が無回転の状態で起動する時に用いられる所定のPI制御パラメータK1(第1所定制御パラメータ、第2所定制御パラメータに相当)よりも低い。特に、モータ51起動直前におけるモータ51の逆回転方向への回転数が多い程、モータ51を起動する時に用いられるPI制御パラメータはより低くなっている。逆に、モータ51起動直前におけるモータ51の回転方向が正回転方向である場合、モータ51を起動する時に用いられるPI制御パラメータは、所定のPI制御パラメータK1よりも高い。特に、モータ51起動直前におけるモータ51の正回転方向への回転数が多い程、モータ51を起動する時に用いられるPI制御パラメータはより高くなっている。
【0110】
ここで、モータ51が無回転状態で起動する場合としては、第1実施形態と同様、モータ51により駆動されるプロペラファン61が逆風や順風等の外力の影響を受けていない、いわゆる無風状態において、モータ51が起動する場合が挙げられる。従って、仮にモータ51を起動させる時に、モータ51起動直前における回転数が“0rpm”であれば、モータ51は無回転状態から起動したことになり、PI制御部107は、モータ51を起動させる時に用いるPI制御パラメータを、所定のPI制御パラメータK1に決定する。尚、所定のPI制御パラメータK1は、モータ51の音や振動などを考慮して決定されることができる。
【0111】
図7によると、逆風等の影響でプロペラファン61に逆回転方向への外力が加わったため、モータ51が逆回転方向に回転している場合、PI制御部107は、モータ51の逆回転側への回転数に応じて、モータ51を起動させる時のPI制御パラメータを所定のPI制御パラメータK1より小さくなるように決定する。逆に、順風等の影響でプロペラファン61に正回転方向への外力が加わったため、モータ51が正回転方向に回転している場合、PI制御部107は、モータ51の正回転側への回転数に応じて、モータ51を起動させる時のPI制御パラメータを所定のPI制御パラメータK1より大きくなるように決定する。尚、PI制御パラメータは、図7では回転数に応じてリニアに変化しているが、これに限定されず、一部或いは全領域において段階的に変化してもよい。
【0112】
また、PI制御部107は、モータ51の起動後、モータ51の回転数やタイマ104の計測時間が所定の条件を満たした場合には、PI制御パラメータを、モータ51の通常回転時におけるPI制御パラメータK2に変更する。ここで、所定の条件としては、第1実施形態と同様、例えば以下のものが挙げられる。
(I)タイマ104による計測時間が第2所定時間を経過した場合。
(II)モータ51の正回転側への回転数が所定回転数B(第3所定数に相当)以上となった場合。
(III)逆回転方向に回転しているモータ51を起動させた後、モータ51の回転が正回転側に切り替わった場合(即ち、回転数が“0rpm”となった場合)
尚、本実施形態では、第1実施形態と同様に、以下より、所定の条件(I)及び(II)が満たされる場合について説明する。
【0113】
また、所定のPI制御パラメータK1及び通常回転時のPI制御パラメータK2は、同じ値であってもよいし、異なる値であってもよい。
【0114】
(2)モータ駆動制御装置の動作
(2−1)一連の動作の流れ
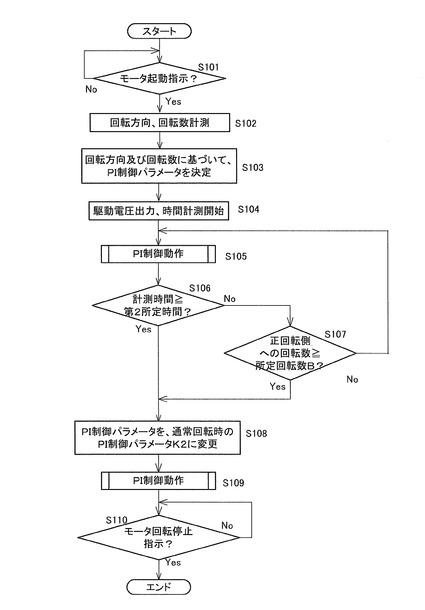
図8は、モータ駆動制御装置101が行う一連の動作の流れを説明するためのフローチャートである。
【0115】
ステップS101〜102:モータ駆動制御装置101は、モータ駆動制御装置101外部からモータ51の起動指示及び指令回転数を取得すると(S101)、回転方向検知部102及び回転数計測部103は、起動直前、即ち現在のモータ51の回転方向及び回転数を、それぞれ検知及び計測する(S102)。
【0116】
ステップS103〜104:駆動電圧調整部105のPI制御部107は、ステップS102で検知及び計測されたモータ51の回転方向及び回転数を図7に当てはめ、モータ51を起動するために用いるPI制御パラメータを決定し、これを記憶部106に記憶する(S103)。PI制御部107により決定されたPI制御パラメータに基づく駆動信号SU2,SV2,SW2は、ゲート制御電圧生成部108及び出力回路109を経てモータ51に出力される(104)。これにより、モータ51は起動する。そして、タイマ104は、時間の計測を開始する。
【0117】
ステップS105:PI制御部107は、モータ51の回転数についてPI制御を行う。尚、PI制御の詳細な動作については、後述する。
【0118】
ステップS106〜109:タイマ104の計測時間、モータ51の回転数及び回転方向が所定の条件を満たした場合、PI制御部107は、PI制御パラメータをモータ51の通常回転時のPI制御パラメータK2に変更する(S108)。そして、PI制御部107は、このPI制御パラメータK2に基づいてPI制御を行う(S109)。これにより、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2は、ゲート制御電圧生成部108及び出力回路109を経てモータ51内の各駆動コイルLu,Lv,Lwに出力される。ここで、所定の条件には、(I)タイマ104の計測時間が第2所定時間を経過した場合(S106)、(II)正転側への回転数が所定回転数B以上となった場合(S107)が該当する。尚、タイマ104の計測時間やモータ51の回転数及び回転方向が、ステップS106及びS107のいずれも満たさない場合、モータ駆動制御装置101は、ステップS105以降の動作を行う。
【0119】
ステップS110:モータ駆動制御装置101は、モータ51の回転停止指示を取得した場合、モータ51の回転を停止させ、一連の動作を終了する。
【0120】
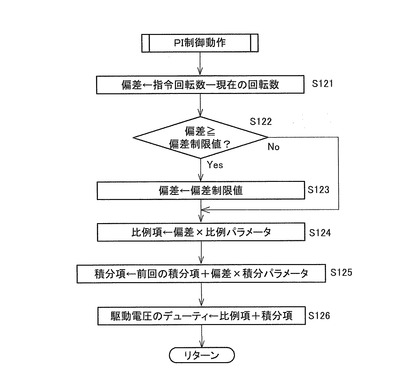
〔PI制御動作〕
図9は、上記動作のステップS105,S109におけるPI制御動作の流れを示すフローチャートである。尚、下記の各動作の過程において得られた演算結果は、記憶部106に一時的に格納される。
【0121】
ステップS121:PI制御部107は、外部から取得した指令回転数から現在のモータ51の回転数を減算し、回転数の偏差を求める。
【0122】
ステップS122〜123:回転数の偏差が偏差制限値以上である場合(S122)、PI制御部107は、偏差を偏差制限値に置き換える(S123)。回転数の偏差が偏差制限値未満の場合は、ステップS121で求められた偏差が、以降の演算で用いられる。
【0123】
ステップS124:PI制御部107は、ステップS121またはステップ123で求められた偏差に、PI制御パラメータである比例パラメータを乗算して、比例項を求める。
【0124】
ステップS125:PI制御部107は、ステップS121またはステップ123で求められた偏差に、PI制御パラメータである積分パラメータを乗算し、これに前回求めた積分項を加算し、積分項を求める。
【0125】
ステップS126:PI制御部107は、ステップS124で求めた比例項にステップS125で求めた積分項を加算し、駆動電圧SU2,SV2,SW2のデューティを決定する。
【0126】
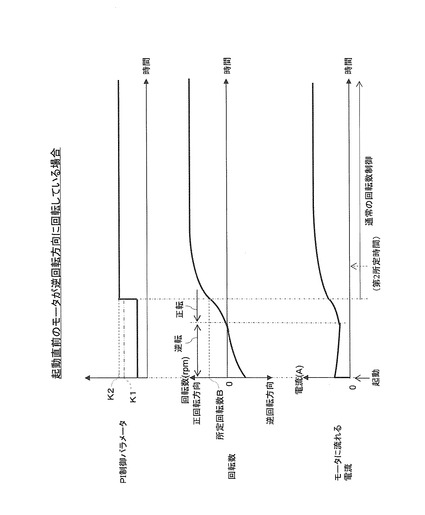
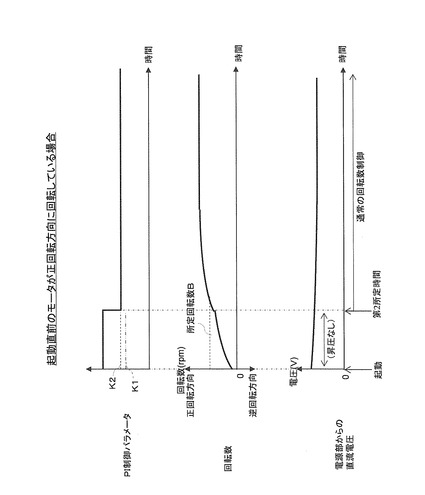
(2−2)調節されたPI制御パラメータ及び回転数の一例
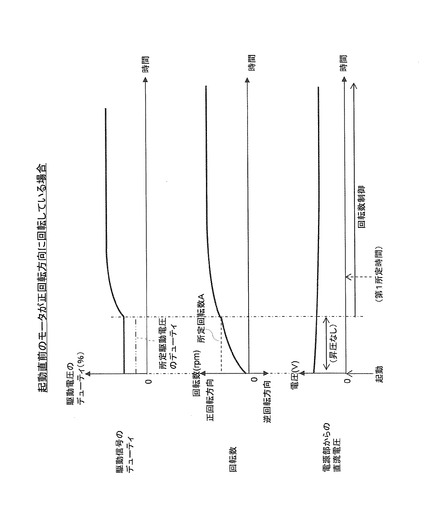
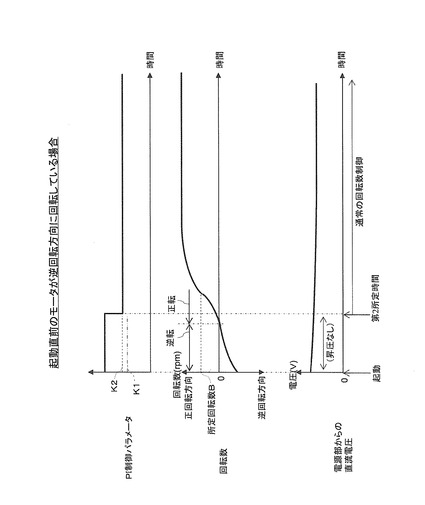
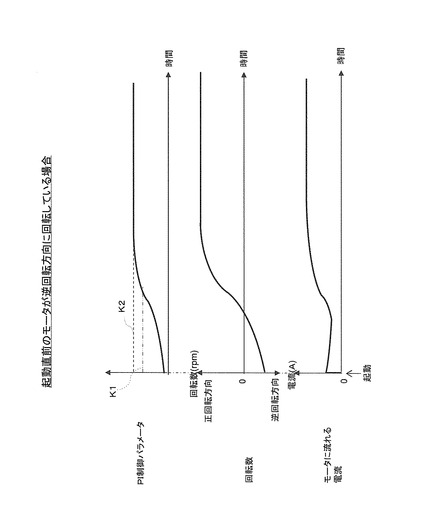
モータ駆動制御装置101が上記動作の流れでモータ51を駆動制御した場合の一例を、図10及び図11に示す。図10は、起動前から逆方向に回転しているモータ51を起動させた場合の、経時的に変化するPI制御パラメータ、モータ51の回転数及びモータ51内の駆動コイルLu,Lv,Lwに流れる電流を示した図である。図11は、起動前から正方向に回転しているモータ51を起動させた場合の、経時的に変化するPI制御パラメータ、モータ51の回転数、及び電源部110からの直流電圧Vccを示した図である。尚、図10及び図11では、所定のPI制御パラメータK1及び通常回転時のPI制御パラメータK2が、異なる値である場合を例にとる。
【0127】
図10に示すように、逆風等の影響によりモータ51が起動前から逆方向に回転している場合、モータ駆動制御装置101は、PI制御パラメータを所定のPI制御パラメータK1よりも低い値に決定し、このPI制御パラメータに基づいてPI制御を行う。これにより、モータ51を起動させる時には、無回転状態のモータ51を起動させる場合の所定駆動電圧よりも低いデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。そのため、モータ51が逆回転状態から起動することによりモータ51の駆動コイルLu,Lv,Lwに過渡的に流れる電流は抑制される。やがて、モータ51の回転方向は正回転となる。
【0128】
ここで、図10では、タイマ104による計測時間が第2所定時間を経過するよりも先に、モータ51の正転側の回転数が所定回転数Bに至っている。従って、モータ駆動制御装置101は、モータ51の正回転側の回転数が所定回転数Bとなった時に、PI制御パラメータを通常回転時のPI制御パラメータK2に変更し、PI制御を行う。これにより、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。従って、モータ駆動制御装置101は、モータ51の駆動コイルLu,Lv,Lwに過渡的に流れる電流を抑えながら、モータ51の回転数を所望の回転数にすることができる。
【0129】
また、図11に示すように、順風等の影響によりモータ51が起動前から正方向に回転している場合、モータ駆動制御装置101は、PI制御パラメータを所定のPI制御パラメータK1よりも高い値に決定し、このPI制御パラメータに基づいてPI制御を行う。これにより、モータ51を起動させる時には、無回転状態のモータ51を起動させる場合の所定駆動電圧よりも高いデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力され、モータ51に出力される駆動電圧のデューティがこの回転数において本来出力されるべき駆動電圧のデューティよりも低いために出力回路109に供給される直流電圧Vccが昇圧してしまう現象は抑制される。その後、モータ51の回転数は徐々に上昇していく。
【0130】
ここで、図11では、モータ51の正転側の回転数が所定回転数Bに至るよりも先に、タイマ104による計測時間が第2所定時間を経過している。従って、モータ駆動制御装置101は、第2所定時間経過時に、PI制御パラメータを通常回転時のPI制御パラメータK2に変更し、PI制御を行う。これにより、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。従って、モータ駆動制御装置101は、直流電圧Vccが昇圧することなく、モータ51の回転数を所望の回転数にすることができる。
【0131】
(3)効果
このモータ駆動制御装置101は、逆風等の影響を受けて逆方向に回転している状態のモータ51を起動させる場合、モータ51起動直前のモータ51の回転方向及び回転数に応じて、PI制御パラメータを、無回転状態のモータ51を起動させる場合に用いられる所定のPI制御パラメータK1よりも小さくなるように調節する。そして、モータ駆動制御装置101は、調節後のPI制御パラメータに基づいてPI制御を行う。これにより、モータ51の起動を起動させる時には、所定のPI制御パラメータK1に基づく所定駆動電圧よりも小さいデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。従って、モータ51が逆回転している状態で起動する際、モータ51に過渡的に流れる電流量を抑えることができる。
【0132】
また、モータ駆動制御装置101は、順風等の影響を受けて正方向に回転している状態のモータ51を起動させる場合、モータ51起動直前のモータ51の回転方向及び回転数に応じて、PI制御パラメータを、無回転状態のモータ51を起動させる場合に用いられる所定のPI制御パラメータK1よりも大きくなるように調節する。そして、モータ駆動制御装置101は、調節後のPI制御パラメータに基づいてPI制御を行う。これにより、モータ51を起動させる時には、所定のPI制御パラメータK1に基づく所定駆動電圧よりも大きいデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。従って、モータ51が正回転している状態で起動する際、駆動電圧SU2,SV2,SW2のデューティが小さいために直流電圧Vccが昇圧される現象を抑制できる。
【0133】
また、モータ駆動制御装置101は、モータ51の回転数についてP制御、PI制御及びPID制御のいずれか1つを行うため、モータ51を的確に制御することができる。
【0134】
また、モータ駆動制御装置101は、モータ51が起動してから第2所定時間経過後、PI制御パラメータを通常回転時のPI制御パラメータK2に変更し、これに基づいてPI制御を行う。これにより、モータ51には、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2が出力される。従って、モータ51は確実に通常回転を行うことができる。
【0135】
また、モータ駆動制御装置101は、モータ51の正転側への回転数が所定回転数B以上となった場合、PI制御パラメータを通常回転時のPI制御パラメータK2に変更する。これにより、モータ51には、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2が出力される。従って、モータ51は確実に通常回転を行うことができる。
【0136】
<その他の実施形態>
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0137】
(a)上記第1実施形態では、モータ駆動制御装置1がPWM制御を行う場合について記載したが、これに限定されない。本発明のモータ駆動制御装置は、駆動電圧の振幅を制御する、いわゆるPAM(Pulse-Amplitude Modulation)制御を行っても良い。
【0138】
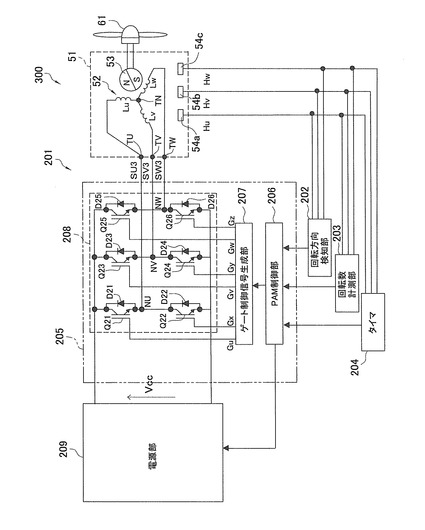
図12は、PAM制御を行うモータ駆動制御装置201と、このモータ駆動制御装置201により駆動制御されるモータ51とを含むモータの駆動制御システム300の構成図である。図12に示すように、モータ駆動制御装置201は、PWM制御部の代わりにPAM制御部206を備える。尚、モータ駆動制御装置201のその他の構成については、第1実施形態と同様である。即ち、モータ駆動制御装置201は、回転方向検知部202、回転数計測部203、タイマ204、駆動制御調整部205、及び電源部209を備える。特に、電源部209は、モータ51の回転数や駆動信号の振幅等に応じて直流電源Vccを昇圧する昇圧回路などを含む。また、駆動制御調整部205は、PAM制御部206、ゲート制御電圧生成部207及び出力回路208を含む。特に、PAM制御部206は、電源部209が直流電圧Vccを調整するための信号も生成する。また、モータ51は、第1実施形態と同様の構成を有しており、図1と同じ符号を付している。
【0139】
このモータ駆動制御装置201では、モータ51起動直前におけるモータ51が逆回転方向に回転している場合、駆動電圧調整部205は、モータ51起動直前の回転数に応じて、駆動電圧SU3,SV3,SW3の振幅が、無回転状態のモータ51を起動させる時の所定駆動電圧より小さくなるように調整する。これにより、第1実施形態と同様、例えば逆風の影響を受けて逆方向に回転しているモータ51を起動させる場合であっても、モータ51に流れる電流量が過渡的に増加することを抑制できる。
【0140】
また、モータ51起動直前におけるモータ51が正回転方向に回転している場合、駆動電圧調整部205は、モータ51起動直前の回転数に応じて、駆動電圧SU3,SV3,SW3の振幅が、無回転状態のモータ51を起動させる時の所定駆動電圧より大きくなるように調整する。これにより、第1実施形態と同様、例えば順風の影響を受けて正方向に回転しているモータ51を起動させる場合であっても、電源部209からの直流電圧が昇圧されることを防ぐことができる。
【0141】
更に、本発明に係るモータ駆動制御装置は、PWM制御とPAM制御とを同時に行うような構成であってもよい。即ち、モータ駆動制御装置は、モータ起動時の駆動電圧のデューティと振幅とを、起動直前におけるモータの回転数及び回転方向に応じて共に変化させてもよい。
【0142】
(b)また、上記第2実施形態においても、モータ制御駆動装置101がPI制御パラメータに基づいてPI制御を行うことで、駆動電圧のデューティが変更される場合について説明したが、このようにPI制御やPID制御などの回転数制御を行う場合においても、その他の実施形態(a)と同様、駆動電圧の振幅のみが変更されたり、デューティ及び振幅の両方が変更されたりしてもよい。
【0143】
(c)上記第1実施形態では、起動直前に正方向に回転しているモータ51を起動させる時に、直流電圧の昇圧動作が生じるとして説明したが、逆風等の影響を受けて逆回転しているモータ51を起動させた際においても、場合によっては直流電圧の昇圧動作が生じてしまう時がある。そこで、このような現象が生じる時には、モータ駆動制御装置1は、起動直前に逆回転方向に回転しているモータ51を起動させる際、図13に示すように、モータ51に出力する駆動電圧SU1,SV1,SW1のデューティを、所定駆動電圧よりも大きくする。これにより、モータ51が起動直前に逆回転している状態からモータ51を起動させた場合に、電源からの直流電圧の昇圧動作が生じることを防ぐことができる。
【0144】
また、上記において、モータ駆動制御装置1は、駆動電圧SU1,SV1,SW1のデューティではなく振幅を所定駆動電圧より大きくしてもよい。これにより、上記と同様、モータ51が起動直前に逆回転している状態からモータを起動させた場合に、直流電圧の昇圧動作が生じることを防ぐことができる。
【0145】
(d)また、上記第2実施形態に係るモータ駆動制御装置101においても、逆風等の影響を受けて逆回転しているモータ51を起動させた場合に直流電圧の昇圧動作が生じてしまう際には、図14に示すように、PI制御パラメータを所定のPI制御パラメータK1よりも大きくするとよい。これにより、その他の実施形態(c)と同様、モータ51起動時にモータ51に出力される駆動電圧のデューティや振幅は所定駆動電圧よりも大きくなるため、電源からの直流電圧の昇圧動作が生じることを防ぐことができる。
【0146】
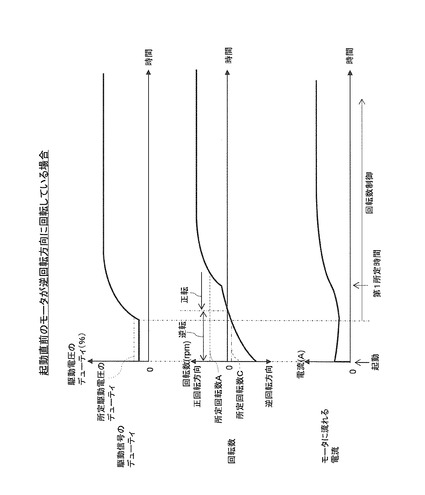
(e)上記第1実施形態では、図3に示すように、タイマ4の計測時間が第1所定時間を経過した場合(S5)、またはモータ51の正転側への回転数が所定回転数Aとなった場合(S6)に、駆動電圧SU1,SV1,SW1のデューティがモータ51の通常回転時の駆動電圧のデューティに変更される場合について説明した。しかし、モータ駆動制御装置1は、更に以下の条件(IV)を満たした場合に、駆動電圧SU1,SV1,SW1のデューティをモータ51の通常回転時の駆動電圧のデューティに変更してもよい。
(IV)モータ51が逆方向に回転している状態で起動した場合に、モータ51の逆回転方向側への回転数が所定回転数C(第2所定数に相当)以下となった場合。
【0147】
この条件が満たされた場合の、経時的に変化する駆動電圧SU1,SV1,SW1のデューティ、モータ51の回転数及びモータ51内に流れる電流を、図15に示す。図15では、モータ駆動制御装置1は、起動直前に逆方向に回転しているモータ51を起動させている。そして、タイマ4の計測時間が第1所定時間を経過したり、モータ51の正転側の回転数が所定回転数Aに至ったりするよりも先に、モータ51の逆回転側の回転数は所定回転数C以下となっている。この時、モータ駆動制御装置1は、モータ51について回転数制御を行う。この回転数制御により、モータ51には、通常回転時のデューティを有する駆動電圧SU1,SV1,SW1が出力される。このように、モータ駆動制御装置1は、条件(IV)を満たした場合に通常回転時の駆動電圧SU1,SV1,SW1を出力しても、モータ51を確実に通常回転させることができる。
【0148】
(f)また、上記第2実施形態に係るモータ駆動制御装置101においても、逆方向に回転しているモータ51を起動させた後、モータ51の逆回転方向側への回転数が所定回転数D(第4所定数に相当)以下となった場合には、PI制御パラメータを通常回転時のPI制御パラメータK2に変更することができる(図16)。これにより、その他の実施形態(e)と同様、モータ駆動制御装置101は、モータ51を確実に通常回転させることができる。
【0149】
(g)上記第2実施形態では、モータ51の回転数及び回転方向などが所定の条件(I),(II)を満たすまでの間、PI制御パラメータが調節される場合について説明したが、所定の条件(I),(II)を満たすまでの間のPI制御パラメータは、図17示すように、除々に通常回転時のデューティに近づくように、その時々のモータ51の回転数及び回転方向に応じて変更されてもよい。
【0150】
図17では、起動前のモータは逆方向に回転しており、PI制御パラメータは、先ず所定のPI制御パラメータK1よりも低い値に決定されている。そしてその後、モータの正転側への回転数の上昇に応じて、PI制御パラメータが通常回転時のPI制御パラメータK2に近づくように調節されている。これにより、モータに出力される駆動電圧のデューティや振幅は、通常回転時のデューティや振幅に除々に近づいていく。そのため、モータが逆回転状態から起動することによりモータの駆動コイルに過渡的に流れる電流を抑えることができる。
【0151】
(h)上記第1及び第2実施形態では、モータを起動するための駆動電圧及びPI制御パラメータが、モータ起動直前におけるモータの回転方向及び回転数に応じて調節されると記載したが、この駆動電圧及びPI制御パラメータは、モータ起動直前におけるモータの回転方向のみに応じて調節されてもよい。
【0152】
(i)上記第1及び第2実施形態では、モータ51がブラシレスDCモータである場合を例に取り説明したが、モータ51は誘導電動機等の他の種類のモータであってもよい。特に、モータが直流モータである場合、駆動電圧は、一定の電圧であることができる。
【0153】
(j)第1及び第2実施形態では、出力回路8、109内のスイッチング素子として絶縁ゲート型バイポーラトランジスタQ1〜Q6,Q11〜Q16を用いた場合について記載したが、スイッチング素子は、MOSFET等の他の種類の素子を用いてもよい。また、第1及び第2実施形態では、Nchの絶縁ゲート型バイポーラトランジスタQ1〜Q6,Q11〜Q16を用いた場合について記載したが、Pchのトランジスタを用いてもよい。
【産業上の利用可能性】
【0154】
本発明に係るモータ駆動制御装置は、例えば空気調和装置内の圧縮機やファン等の回転駆動源として用いられるモータの駆動を制御するための装置として適用できる。
【符号の説明】
【0155】
1,101,201 モータ駆動制御装置
2,102,202 回転方向検知部
3,103,203 回転数計測部
4,104,204 タイマ
5,105,205 駆動電圧調整部
6 PWM制御部
7,108,207 ゲート制御電圧生成部
8,109,208 出力回路
9,110,209 電源部
51 モータ
52 ステータ
53 ロータ
54a〜54c ホール素子
61 プロペラファン
100,200,300 モータ駆動制御システム
106 記憶部
107 PI制御部
206 PAM制御部
Lu,Lv,Lw 駆動コイル
SU1,SV1,SW1 SU2,SV2,SW2 SU3,SV3,SW3 駆動電圧
【先行技術文献】
【特許文献】
【0156】
【特許文献1】特開平8−303386号公報
【技術分野】
【0001】
本発明は、モータ駆動制御装置、特に、正回転方向または逆回転方向に回転可能なモータを駆動させるための駆動電圧を出力してモータの駆動を制御するモータ駆動制御装置に関する。
【背景技術】
【0002】
近年、圧縮機やファン等の機器を備えた空気調和装置では、これらの機器の動力源としてモータが多く用いられている。そして、空気調和装置には、このモータを駆動させる駆動装置が更に備えられている。
【0003】
ここで、モータが例えば室外ファンの動力源として用いられる場合について説明する。駆動装置がこのモータを起動させようとする際、逆風等の影響により室外ファンに逆回転方向への外力が加わっていると、モータは逆回転方向に回転する。この状態でモータを起動させると、モータには、無風時のように室外ファンに外力が加わっていない状態でモータが正常に起動する場合よりも大きい電流が流れる。特に、この電流は、モータの逆回転側への回転数が高いほど増大する。このように、モータに流れる電流が増大すると、このモータを駆動している駆動装置内の出力回路における発熱量が増え、例えば出力回路を構成しているスイッチング素子が破壊してしまう恐れがある。
【0004】
そこで、特許文献1(特開平8−303386号公報)では、モータ逆回転時の回転数の上限値を設けておき、モータが逆回転方向に回転した際の回転数がこの上限値を超えた場合、モータの回転を停止させるものが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された方法では、例えばモータの起動前から逆風が強い場合、モータの逆回転方向への回転数は起動する前から上限値を超えてしまい、モータは起動できないおそれがある。また、空気調和装置における一空気流路内に、例えば2台のファンが並べて配置されている際に、一方のファンを正回転方向に駆動させると、他方のファンは一方のファンからの風の影響により逆回転方向に回転してしまう場合がある。この現象は、特に、空気調和装置の機内外の静圧差が高い場合に生じやすい。しかし、このような場合も、他方のファンを起動させようとする際に、この他方のファンが一方のファンからの影響を強く受け逆回転していると、他方のファンを駆動するためのモータの回転数は起動する前から上限値を超えてしまうおそれがある。結果、このモータは、起動できなくなってしまう。
【0006】
一方で、例えば順風等の影響によりファンの正回転方向に外力が加わり、起動前から正回転方向に回転している状態のモータを起動させると、駆動装置内の出力回路に供給される直流電圧が昇圧されてしまう、いわゆる昇圧動作が生じる場合がある。これは、モータ起動時のモータの回転数に対して、駆動装置からモータに出力される駆動電圧が小さすぎることに起因して生じる。このように、昇圧動作が生じると、駆動装置内部ではいわゆる過電圧保護機能がはたらき、結果としてモータは正常に起動できなくなる。
【0007】
そこで、本発明は、モータを起動させる際、逆風や順風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供を目的とする。
【課題を解決するための手段】
【0008】
発明1に係るモータ駆動制御装置は、正回転方向または逆回転方向に回転可能なモータを駆動させるための駆動電圧を出力し、モータの駆動を制御する。このモータ駆動制御装置は、回転方向検知手段と駆動電圧調整手段とを備える。回転方向検知手段は、モータ起動直前の回転方向を検知する。駆動電圧調整手段は、モータの起動直前時に回転方向検知手段により検知されたモータの回転方向に応じて、モータ起動時の駆動電圧が、モータが無回転の状態で起動する場合にモータに出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整手段は、モータの起動直前の回転方向に応じて、モータの回転数を制御するための制御パラメータを、モータが無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
【0009】
このモータ駆動制御装置は、モータ起動直前時のモータの回転方向に応じて、制御パラメータを調節することでモータ起動時の駆動電圧のデューティや振幅等を調整し、モータに出力する。これにより、起動直前時、モータには順風や逆風等の影響により既にモータが正方向または逆方向のどちらかに回転している状態において、このモータを起動させる場合であっても、モータ駆動制御装置は、モータを異常停止させることなく確実に起動させることができる。
【0010】
特に、モータの回転数を制御する手段としては、例えばP制御、PI制御及びPID制御等が挙げられる。このモータ駆動制御装置は、起動直前にモータが逆回転方向に回転している場合、例えばPI制御パラメータ等である制御パラメータを、無回転時にモータを起動させる時に用いられる所定制御パラメータとは異なる値にする。これにより、モータ起動時の駆動電圧は調整され、該駆動電圧の有するデューティや振幅は、無回転状態のモータの起動時にモータに出力される所定駆動電圧のデューティや振幅等とは異なった値となる。このように、本発明は、PI制御等の回転数制御を行うモータ駆動制御装置に適用できる。
【0011】
発明2に係るモータ駆動制御装置は、発明1に係るモータ駆動制御装置であって、回転数計測手段を更に備える。回転数計測手段は、モータ起動直前のモータの回転数を計測する。そして、駆動電圧調整手段は、モータ起動直前のモータの回転数に応じて制御パラメータを更に調節することで、モータ起動時の駆動電圧を更に調整する。
【0012】
これにより、起動直前時に既にモータが回転している状態にあっても、このモータ駆動制御装置は、その時々の回転数に応じてモータを起動させるためにモータに出力する駆動電圧を調整するため、モータをより確実に起動させることができる。
【0013】
発明3に係るモータ駆動制御装置は、発明1または2に係るモータ駆動制御装置であって、駆動電圧調整手段は、モータ起動直前のモータの回転数が逆回転方向である場合、駆動電圧が所定駆動電圧よりも小さくなるように、制御パラメータを所定制御パラメータよりも小さくなるよう調節する。
【0014】
このモータ駆動制御装置は、例えば逆風等の影響を受けてモータが起動直前時に逆回転方向に回転している場合、制御パラメータを所定制御パラメータよりも小さくなるよう調節することで、このモータを起動させるためにモータに出力する駆動電圧のデューティや振幅等を、所定駆動電圧よりも小さくする。これにより、モータ駆動制御装置は、起動直前に例えば逆回転しているモータを起動させた場合、モータに通電される電流量を抑えることができる。
【0015】
発明4に係るモータ駆動制御装置は、発明3に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータの起動直前の回転数に応じて、制御パラメータを所定制御パラメータよりも小さくなるように調節する。
【0016】
このモータ駆動制御装置は、例えば逆風等の影響を受けて起動直前にモータが逆回転方向に回転している場合、制御パラメータを所定制御パラメータよりも小さくなるように調節する。これにより、無回転状態のモータの起動時にモータに出力される所定駆動電圧よりも、デューティや振幅等が小さい駆動電圧がモータに出力される。このように、例えば逆方向に回転しているモータを起動させる場合等に、モータに通電される電流量を抑えることができる。
【0017】
発明5に係るモータ駆動制御装置は、発明4に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧のデューティが所定駆動電圧のデューティより小さくなるように、制御パラメータを所定制御パラメータよりも小さくなるよう調節する。
【0018】
このモータ駆動制御装置としては、例えばモータをPWM(Pulse-Width Modulation)制御するものが挙げられる。モータ駆動制御装置は、例えば逆風等の影響を受けてモータが起動直前時に逆回転方向に回転している場合、このモータを起動させるための駆動電圧のデューティを所定駆動電圧のデューティよりも小さくする。これにより、起動直前に逆回転しているモータを起動させた場合、モータに通電される電流量はより抑えられる。
【0019】
発明6に係るモータ駆動制御装置は、発明4または5に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧の振幅を所定駆動電圧の振幅より小さくなるように、制御パラメータを所定制御パラメータよりも小さくなるよう調節する。
【0020】
このモータ駆動制御装置としては、例えばモータをPAM(Pulse-Amplitude Modulation)制御するものが挙げられる。モータ駆動制御装置は、例えば逆風等の影響を受けてモータが起動直前に逆回転方向に回転している場合、このモータを起動させるための駆動電圧の振幅を所定駆動電圧の振幅よりも小さくする。これにより、起動直前に逆回転しているモータを起動させた場合、モータに通電される電流量はより抑えられる。
【0021】
発明7に係るモータ駆動制御装置は、発明1または2に係るモータ駆動制御装置であって、駆動電圧調整手段は、モータ起動直前のモータの回転数が逆回転方向である場合、駆動電圧が所定駆動電圧よりも大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0022】
起動直前に正回転しているモータを起動させる際だけでなく、逆風等の影響を受けて逆回転しているモータをモータ駆動制御装置が起動させた際においても、モータ駆動制御装置内の駆動電圧調整手段に供給される直流電圧に昇圧動作が生じてしまう場合がある。そこで、このモータ駆動制御装置は、例えば順風や逆風等の影響を受けて起動直前にモータが正回転または逆回転方向に回転している場合、制御パラメータを所定制御パラメータよりも大きくなるよう調節することで、このモータを起動させるためにモータに出力する駆動電圧のデューティや振幅等を、所定駆動電圧より大きくする。これにより、起動直前に逆回転しているモータを起動させた場合に、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を防ぐことができる。
【0023】
発明8に係るモータ駆動制御装置は、発明7に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前時の回転数に応じて、制御パラメータを所定制御パラメータよりも大きくなるように調節する。
【0024】
このモータ駆動制御装置は、起動直前にモータが正回転または逆回転方向に回転している場合、制御パラメータを所定制御パラメータよりも大きくなるように調節する。これにより、正方向や逆方向に回転しているモータを起動させる場合に、直流電圧の昇圧動作が生じることを防ぐことができる。
【0025】
発明9に係るモータ駆動制御装置は、発明8に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧のデューティが所定駆動電圧のデューティより大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0026】
このモータ駆動制御装置は、起動直前に逆回転方向に回転しているモータを起動させる時に、モータに出力する駆動電圧のデューティを、所定駆動電圧よりも大きくする。これにより、モータが起動直前に逆回転している状態からモータを起動させた場合に、電源からの直流電圧の昇圧動作が生じることを防ぐことができる。
【0027】
発明10に係るモータ駆動制御装置は、発明8または9に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧の振幅が所定駆動電圧の振幅より大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0028】
これにより、モータが起動直前に逆回転している状態からモータを起動させた場合に、直流電圧の昇圧動作が生じることをより防ぐことができる。
【0029】
発明11に係るモータ駆動制御装置は、発明1または2に係るモータ駆動制御装置であって、駆動電圧調整手段は、モータ起動直前のモータの回転数が正回転方向である場合、駆動電圧が所定駆動電圧よりも大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0030】
これにより、例えば順風等の影響を受けて起動直前に正回転しているモータを起動させた場合に、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を、より防ぐことができる。
【0031】
発明12に係るモータ駆動制御装置は、発明11に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、制御パラメータを所定制御パラメータよりも大きくなるように調節する。
【0032】
これにより、例えば順風等の影響を受けて起動直前に正回転しているモータを起動させた場合に、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を、より防ぐことができる。
【0033】
発明13に係るモータ駆動制御装置は、発明12に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧のデューティが所定駆動電圧のデューティより大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0034】
このモータ駆動制御装置は、モータが起動直前に正回転方向に回転している場合、制御パラメータを所定制御パラメータよりも大きくなるよう調節することで、このモータを起動させるための駆動電圧のデューティを所定駆動電圧のデューティよりも大きくする。これにより、起動直前に正回転しているモータを起動させた場合に、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を、より防ぐことができる。
【0035】
発明14に係るモータ駆動制御装置は、発明12または13に係るモータ駆動制御装置であって、駆動電圧調整手段は、更にモータ起動直前のモータの回転数に応じて、駆動電圧の振幅が所定駆動電圧の振幅より大きくなるように、制御パラメータを所定制御パラメータよりも大きくなるよう調節する。
【0036】
このモータ駆動制御装置は、モータが起動直前に正回転方向に回転している場合、制御パラメータを所定制御パラメータよりも大きくなるよう調節することで、このモータを起動させるための駆動電圧の振幅を所定駆動電圧の振幅よりも大きくする。これにより、起動直前に正回転しているモータを起動させた場合に、例えば駆動電圧調整手段に供給される直流電圧が昇圧される現象を、より防ぐことができる。
【0037】
発明15に係るモータ駆動制御装置は、発明3〜14のいずれかに係るモータ駆動制御装置であって、計測手段を更に備える。計測手段は、モータが起動してからの時間を計測する。そして、計測手段により計測されている時間が所定時間を経過した場合、駆動電圧調整手段は、制御パラメータがモータ通常回転時の制御パラメータとなるように調節することで、駆動電圧をモータの通常回転時の駆動電圧に変更する。
【0038】
このモータ駆動制御装置によると、所定時間経過後、モータには通常回転時の駆動電圧が出力される。従って、モータは確実に通常回転を行うことができる。
【0039】
発明16に係るモータ駆動制御装置は、発明3〜14のいずれかに係るモータ駆動制御装置であって、モータの起動後、モータの正回転側への回転数が第1所定数以上となった場合、駆動電圧調整手段は、制御パラメータがモータ通常回転時の制御パラメータとなるように調節することで、駆動電圧をモータの通常回転時の駆動電圧に変更する。
【0040】
このモータ駆動制御装置によると、モータの正回転側への回転数が第1所定数以上となった場合、モータには通常回転時の駆動電圧が出力される。従って、モータは確実に通常回転を行うことができる。
【0041】
発明17に係るモータ駆動制御装置は、発明3〜10のいずれかに係るモータ駆動制御装置であって、モータ起動後、モータの逆回転側への回転数が第2所定数以下となった場合、駆動電圧調整手段は、制御パラメータがモータ通常回転時の制御パラメータとなるように調節することで、駆動電圧をモータの通常回転時の駆動電圧に変更する。
【0042】
このモータ駆動制御装置によると、起動直前にモータが逆回転方向に回転している状態でモータを起動させた際に、モータの逆回転側への回転数が第2所定数以下となると、モータには通常回転時の駆動電圧が出力される。従って、モータは確実に通常回転を行うことができる。
【0043】
発明18に係るモータ駆動制御装置は、発明3〜14のいずれかに係るモータ駆動制御装置であって、駆動電圧調整手段は、モータの回転数及び回転方向に応じて、制御パラメータがモータ通常回転時の制御パラメータに近づくように調節することで、駆動電圧がモータの通常回転時の駆動電圧に近づくようにする。
【0044】
これにより、駆動電圧のデューティや振幅等は、モータの回転数及び回転方向に応じてモータの通常回転時に出力される駆動電圧に近づく。従って、モータは徐々に通常回転を行うようになる。
【0045】
発明19に係るモータ駆動制御装置は、発明1〜18のいずれかに係るモータ駆動制御装置であって、駆動電圧調整手段は、モータの回転数について、P制御、PI制御及びPID制御のうちいずれか1つの制御を行う。
【0046】
これにより、モータ駆動制御装置は、モータを的確に制御することができる。
【0047】
発明20に係るモータ駆動制御装置は、発明1〜19のいずれかに係るモータ駆動制御装置であって、モータはファンモータである。
【0048】
これにより、例えばファンモータの運転停止後に、ファンモータに接続されたファンの慣性により回転が継続した状態からファンモータを再起動させた場合や、逆風や順風の影響を受けて正回転または逆回転方向に回転しているファンモータを起動させた場合であっても、モータ駆動制御装置は、確実にファンモータの回転制御を行うことができる。これにより、ファンモータは的確な回転を行うことができる。
【0049】
発明21に係るモータ駆動制御装置は、発明20に係るモータ駆動制御装置であって、ファンモータは、空気調和装置の室外機に用いられる室外機用ファンモータである。
【0050】
室外機用では、逆風や順風等による外乱が大きい。そこで、本発明のモータ駆動制御装置を、室外機用ファンモータを回転駆動させるために用いることで、外乱が大きい場合であっても、室外機用ファンモータはより確実に回転することができる。
【0051】
発明22に係るモータ駆動制御装置は、発明1〜21のいずれに係るモータ駆動制御装置であって、モータはブラシレスDCモータである。
【0052】
逆風や順風等の影響を受けて回転しているモータを起動させる時に、直流電圧が昇圧される現象が生じる場合があるが、本発明のモータ駆動制御装置を、ブラシレスDCモータを回転駆動させるために用いることで、直流電圧が昇圧される現象をより防止することができる。
【発明の効果】
【0053】
発明1に係るモータ駆動制御装置によると、モータの起動直前時、例えば風等の外力によりモータが正方向または逆方向のどちらかに既に回転している状態にあり、このモータを起動させる場合であっても、モータ駆動制御装置は、モータを異常停止させることなく確実に起動させることができる。特に、モータ起動時の駆動電圧は調整され、該駆動電圧の有するデューティや振幅は、無回転状態のモータの起動時にモータに出力される所定駆動電圧のデューティや振幅等とは異なった値となる。このように、本発明は、PI制御等の回転数制御を行うモータ駆動制御装置に適用できる。
【0054】
発明2に係るモータ駆動制御装置によると、モータをより確実に起動させることができる。
【0055】
発明3〜6に係るモータ駆動制御装置によると、モータに通電される電流量を抑えることができる。
【0056】
発明7〜14に係るモータ駆動制御装置によると、例えばモータ駆動制御装置の駆動電圧調整手段に供給される直流電圧が昇圧される現象を、防ぐことができる。
【0057】
発明15〜17に係るモータ駆動制御装置によると、モータは確実に通常回転を行うことができる。
【0058】
発明18に係るモータ駆動制御装置によると、モータの回転数が高くなる程、駆動電圧のデューティや振幅等はモータの通常回転時に出力される駆動電圧に近づく。従って、モータは徐々に通常回転を行うようになる。
【0059】
発明19に係るモータ駆動制御装置によると、モータを的確に制御することができる。
【0060】
発明20に係るモータ駆動制御装置によると、モータ駆動制御装置は、確実にファンモータの回転制御を行うことができる。従って、ファンモータは的確な回転を行うことができる。
【0061】
発明21に係るモータ駆動制御装置によると、外乱が大きい場合であっても、室外機用ファンモータはより確実に回転することができる。
【0062】
発明22に係るモータ駆動制御装置によると、直流電圧が昇圧される現象をより防止することができる。
【図面の簡単な説明】
【0063】
【図1】第1実施形態に係るモータの駆動制御システム全体の構成とモータ駆動制御装置の内部構成とを示したブロック図。
【図2】第1実施形態に係るモータ起動直前時の各回転方向における回転数と、モータを起動する時にモータに出力される駆動電圧のデューティとの関係を示す概念図。
【図3】第1実施形態に係るモータ駆動制御装置が行う一連の動作の流れを説明するためのフローチャート。
【図4】第1実施形態に係るモータ駆動制御装置が、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図5】第1実施形態に係るモータ駆動制御装置が、正方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図6】第2実施形態に係るモータの駆動制御システム全体の構成とモータ駆動制御装置の内部構成とを示したブロック図。
【図7】第2実施形態に係るモータ起動直前時の各回転方向における回転数と、モータを起動する時に用いられるPI制御パラメータとの関係を示す概念図。
【図8】第2実施形態に係るモータ駆動制御装置が行う一連の動作の流れを説明するためのフローチャート。
【図9】PI制御動作の流れを説明するためのフローチャート。
【図10】第2実施形態に係るモータ駆動制御装置が、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図11】第2実施形態に係るモータ駆動制御装置が、正方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図12】その他の実施形態(a)に係るモータの駆動制御システム全体の構成とモータ駆動制御装置の内部構成とを示したブロック図。
【図13】その他の実施形態(c)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図14】その他の実施形態(d)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図15】その他の実施形態(e)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図16】その他の実施形態(f)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【図17】その他の実施形態(g)に対応する図であって、逆方向に回転しているモータを起動した場合に、経時的に変化する各信号の一例を示した図。
【発明を実施するための形態】
【0064】
<第1実施形態>
(1)全体及びモータの構成
図1は、モータ51と、このモータ51の駆動を制御するためのモータ駆動制御装置1とを含むモータの駆動制御システム100全体の構成図である。ここで、モータの種類としては、一般的には直流モータや交流モータ、ステッピングモータ、ブラシレスDCモータ等が挙げられるが、本実施形態では、モータ51がブラシレスDCモータである場合を例にとる。
【0065】
モータ51は、空気調和装置の室外機におけるプロペラファン61の駆動源として用いられる室外機用ファンモータであって、ステータ52と、ロータ53と、3つのホール素子54a,54b,54cとを備えている。
【0066】
ステータ52は、スター結線されたU相、V相及びW相の駆動コイルLu,Lv,Lwを含む。U相、V相及びW相の駆動コイルLu,Lv,Lwの一方端はそれぞれU相、V相及びW相の駆動コイル端子TU,TV,TWに接続され、これらの他方端は全て端子TNに接続されている。これら3相の駆動コイルLu,Lv,Lwは、ロータ53が回転することによりその回転速度とロータ53の位置に応じた誘起電圧を発生させる。
【0067】
ロータ53は、N極及びS極からなる2極の永久磁石を含み、ステータ52に対し回転軸を中心として回転する。ロータ53の回転は、この回転軸と同一軸心上にある出力軸(図示せず)を介してプロペラファン61に出力される。
【0068】
3つのホール素子54a〜54cは、ステータ52に対するロータ53の位置を、ロータ53の永久磁石の極性に基づいて検出するものであって、検出後のロータ53の位置を示す位置検出信号Hu,Hv,Hwをモータ駆動制御装置1に出力する。
【0069】
(2)モータ駆動制御装置の構成
次いで、本実施形態に係るモータ駆動制御装置1の構成について説明する。本実施形態のモータ駆動制御装置1は、図1に示すように、回転方向検知部2、回転数計測部3、タイマ4(第1計測手段に相当)、駆動電圧調整部5及び電源部9を備える。
【0070】
〔回転方向検知部〕
回転方向検知部2は、各ホール素子54a〜54cから出力される位置検出信号Hu,Hv,Hwを用いて、モータ51におけるロータ53の回転方向を検知する。以下より、説明を簡単にするため、モータ51におけるロータ53の回転方向を、単に“モータ51の回転方向”と記載する。
【0071】
尚、検知されたモータ51の回転方向は、駆動電圧調整部5に取り込まれる。
【0072】
〔回転数計測部〕
回転数計測部3は、各ホール素子54a〜54cから出力される位置検出信号Hu,Hv,Hwを用いて、モータ51におけるロータ53の回転数を計測する。以下より、説明を簡単にするため、モータ51の回転方向と同様、モータ51におけるロータ53回転数を、単に“モータ51の回転数”と記載する。
【0073】
尚、計測されたモータ51の回転数は、駆動電圧調整部5に取り込まれる。
【0074】
〔タイマ〕
タイマ4は、モータ51が起動してからの時間を計測する。計測された時間は、モータ51の回転方向及び回転数と同様に、駆動電圧調整部5に取り込まれる。
【0075】
〔駆動電圧調整部〕
駆動電圧調整部5は、モータ51をPWM(Pulse-Width Modulation)制御するための駆動電圧SU1,SV1,SW1を生成してモータ51に出力するためのものであって、PWM制御部6、ゲート制御電圧生成部7及び出力回路8を備える。
【0076】
〔PWM制御部〕
PWM制御部6は、モータ51の回転方向及び回転数に基づいて、各駆動コイルLu,Lv,Lwに印加される駆動電圧SU1,SV1,SW1のデューティを決定し、このデューティを示すPWMデューティ電圧v_dutyを、ゲート制御電圧生成部7に出力する。特に、本実施形態に係るPWM制御部6は、逆風や順風等の影響をプロペラファン61が受け、このプロペラファン61の影響により正方向や逆方向に外力が加わって回転している状態のモータ51を起動させる場合、起動直前におけるモータ51の回転方向及び回転数に基づいて、駆動電圧SU1,SV1,SW1のデューティを決定する。
【0077】
以下に、本実施形態に係るPWM制御部6が、モータ51を起動させる時に、駆動電圧SU1,SV1,SW1のデューティをどのように決定するかについて説明する。具体的には、PWM制御部6は、モータ51を起動させる時、先ずはモータ51起動直前、即ち現在のモータ51の回転方向及び回転数を回転方向検知部2及び回転数計測部3からそれぞれ取得し、次いで取得した回転方向及び回転数を図2に当てはめることで、駆動電圧SU1,SV1,SW1のデューティを決定する。図2は、モータ51起動直前におけるモータ51の各回転方向への回転数(rpm)と、モータ51起動時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティ(%)との関係を示している。図2によると、モータ51起動直前におけるモータ51の回転方向が逆回転方向である場合、モータ51を起動する時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティは、モータ51が無回転状態で起動する場合にモータ51に出力される所定駆動電圧のデューティよりも低い。特に、モータ51起動直前におけるモータ51の逆回転方向への回転数が多い程、モータ51を起動する時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティはより低くなっている。逆に、モータ51起動直前におけるモータ51の回転方向が正回転方向である場合、モータ51を起動する時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティは、所定駆動電圧のデューティよりも高い。特に、モータ51起動直前におけるモータ51の正回転方向への回転数が多い程、モータ51を起動する時にモータ51に出力される駆動電圧SU1,SV1,SW1のデューティはより高くなっている。
【0078】
ここで、モータ51が無回転状態で起動する場合としては、モータ51により駆動されるプロペラファン61が逆風や順風等の外力の影響を受けていない、いわゆる無風状態において、モータ51が起動する場合が挙げられる。従って、仮にモータ51を起動させる時に、モータ51起動直前における回転数が“0rpm”であれば、モータ51は無回転状態から起動したことになり、PWM制御部6は、モータ51を起動させるための駆動電圧SU1,SV1,SW1のデューティを、所定駆動電圧のデューティと決定する。尚、所定駆動電圧のデューティは、モータ51の音や振動などを考慮して決定されることができる。尚、駆動電圧SU1,SV1,SW1のデューティは、必ずしも一定値である必要はなく、例えば正弦波変調されていてもよいことは、言うまでもない。
【0079】
図2によると、逆風等の影響でプロペラファン61に逆回転方向への外力が加わったため、モータ51が逆回転方向に回転している場合、PWM制御部6は、モータ51の逆回転側への回転数に応じて、モータ51を起動させる時の駆動電圧SU1,SV1,SW1のデューティを所定駆動電圧のデューティより小さくなるように決定する。逆に、順風等の影響でプロペラファン61に正回転方向への外力が加わったため、モータ51が正回転方向に回転している場合、PWM制御部6は、モータ51の正回転側への回転数に応じて、モータ51を起動させる時の駆動電圧SU1,SV1,SW1のデューティを所定駆動電圧のデューティより大きくなるように決定する。尚、駆動電圧SU1,SV1,SW1のデューティは、図2では回転数に応じてリニアに変化しているが、これに限定されず、一部或いは全領域において段階的に変化してもよい。
【0080】
また、PWM制御部6は、モータ51の起動後、モータ51の回転数やタイマ4の計測時間が所定の条件を満たした場合には、駆動電圧SU1,SV1,SW1のデューティをモータ51の通常回転時における駆動電圧のデューティに変更する。ここで、所定の条件としては、例えば以下のものが挙げられる。
(I)タイマ4による計測時間が第1所定時間を経過した場合。
(II)モータ51の正回転側への回転数が所定回転数A(第1所定数に相当)以上となった場合。
(III)逆回転方向に回転しているモータ51を起動させた後、モータ51の回転が正回転側に切り替わった場合(即ち、回転数が“0rpm”となった場合)
尚、本実施形態では、以下より、所定の条件(I)及び(II)が満たされる場合について説明する。
【0081】
〔ゲート制御電圧生成部〕
ゲート制御電圧生成部7は、PWM制御部6により決定されたデューティを有する駆動電圧SU1,SV1,SW1が出力回路8からモータ51に出力されるように、出力回路8を制御する。より具体的には、ゲート制御電圧生成部7は、PWM制御部6から出力されたPWMデューティ電圧v_dutyに基づいて、絶縁ゲート型バイポーラトランジスタQ1〜Q6のオン及びオフを制御するためのゲート制御電圧Gu,Gx,Gv,Gy,Gw,Gzを生成する。生成されたゲート制御電圧Gu,Gx,Gv,Gy,Gw,Gzは、絶縁ゲート型バイポーラトランジスタQ1〜Q6の各ゲート端子に印加される。
【0082】
〔出力回路〕
出力回路8は、ゲート制御電圧Gu,Gx,Gv,Gy,Gw,Gzに基づいて駆動電圧SU1,SV1,SW1を出力するものであって、絶縁ゲート型バイポーラトランジスタQ1〜Q6(以下、単にトランジスタという)と還流用のダイオードD1〜D6とを含む。トランジスタQ1及びQ2、Q3及びQ4、Q5及びQ6は、電源配線とGNDのラインとの間に直列に接続されている。トランジスタQ1及びQ2、Q3及びQ4、Q5及びQ6の間の各接続点NU,NV,NWは、それぞれモータ51のU相、V相及びW相の駆動コイル端子TU,TV,TWに接続されている。ダイオードD1〜D6は、各トランジスタQ1〜Q6に逆電圧が印加された場合に導通するような特性を有しており、各トランジスタQ1〜Q6に並列に接続されている。
【0083】
このような構成を有する出力回路9によると、トランジスタQ1〜Q6が各ゲート端子に印加されるゲート制御電圧Gu,Gx,Gv,Gy,Gw,Gzに基づいてオン及びオフすることで、PWM制御部6により決定されたデューティを有する駆動電圧SU1,SV1,SW1は、各駆動コイルLu,Lv,Lwに出力される。
【0084】
〔電源部〕
電源部9は、交流電圧を直流に変換し、電源配線を介して出力回路8に供給する直流電圧Vccを生成する。尚、このような電源部9内部には、駆動電圧SU、SV,SWのデューティやモータ51の回転数等に応じて直流電圧Vccを変更する機能部等が含まれている。このような機能部としては、例えば電圧調整回路や昇圧回路が挙げられる。
【0085】
(3)モータ駆動制御装置の動作
(3−1)一連の動作の流れ
図3は、モータ駆動制御装置1が行う一連の動作の流れを説明するためのフローチャートである。
【0086】
ステップS1〜2:モータ駆動制御装置1は、例えば空気調和装置の室外機等の、モータ駆動制御装置1の外部からモータ51の起動指示を取得すると(S1)、回転方向検知部2及び回転数計測部3は、モータ51起動直前のモータ51の回転方向及び回転数をそれぞれ検知及び計測する(S2)。
【0087】
ステップS3〜4:駆動電圧調整部5のPWM制御部6は、ステップS2で検知及び計測されたモータ51の回転方向及び回転数を図2に当てはめ、モータ51を起動するためにモータ51に出力する駆動電圧SU1,SV1,SW1のデューティを決定する(S3)。例えば、ステップS2で検知したモータ51の回転方向が逆回転である場合、PWM制御部6は、駆動電圧SU1,SV1,SW1のデューティを所定駆動電圧のデューティ以下に決定し、逆にモータ51の回転方向が正回転である場合、PWM制御部6は、駆動電圧SU1,SV1,SW1のデューティを所定駆動電圧のデューティ以上に決定する。このようにして決定されたデューティを有する駆動電圧SU1,SV1,SW1は、ゲート制御電圧生成部7及び出力回路8を経てモータ51内の各駆動コイルLu,Lv,Lwに出力される(S4)。これにより、モータ51は起動する。そして、タイマ4は、時間の計測を開始する。
【0088】
ステップS5〜7:タイマ4の計測時間、モータ51の回転数及び回転方向が所定の条件を満たした場合、モータ駆動制御装置1は、モータ51について回転数制御を行う。より具体的には、駆動電圧SU1,SV1,SW1のデューティは、回転数制御により通常回転時の駆動電圧のデューティとなるように決定され、このように決定されたデューティを有する駆動電圧SU1,SV1,SW1は、ゲート制御電圧生成部7及び出力回路8を経てモータ51内の各駆動コイルLu,Lv,Lwに出力される(S7)。ここで、所定の条件には、(I)タイマ4の計測時間が第1所定時間を経過した場合(S5)、(II)モータ51の正転側への回転数が所定回転数Aとなった場合(S6)が該当する。尚、タイマ4の計測時間、モータ51の回転数及び回転方向が、ステップS5またはS6におけるいずれの所定の条件をも満たさない場合、モータ駆動制御装置1は、ステップS5以降の動作を繰り返す。また、回転数制御の方法としては、P(Proportional)制御、PI(Proportional and Integral)制御、PID(Proportional, Integral and Derivative)制御などが挙げられる。
【0089】
ステップS8:モータ駆動制御装置1は、モータ51の回転停止指示を空気調和装置の室外機等のモータ駆動制御装置1外部から取得するまで、モータ51について回転数制御を行う(S8)。尚、モータ駆動制御装置1は、モータ51の回転停止指示を取得した場合、モータ51の回転を停止させ、一連の動作を終了する。
【0090】
(3−2)調節された駆動電圧のデューティ及び回転数の一例
モータ駆動制御装置1が上記動作の流れでモータ51を駆動制御した場合の一例を、図4及び図5に示す。図4は、起動前から逆方向に回転しているモータ51を起動させた場合の、経時的に変化する駆動電圧SU1,SV1,SW1のデューティ、モータ51の回転数及びモータ51内の駆動コイルLu,Lv,Lwに流れる電流を示した図である。図5は、起動前から正方向に回転しているモータ51を起動させた場合の、経時的に変化する駆動電圧SU1,SV1,SW1のデューティ、モータ51の回転数、及び電源部9からの直流電圧を示した図である。
【0091】
図4に示すように、逆風等の影響によりモータ51が起動前から逆方向に回転している場合、モータ駆動制御装置1は、所定駆動電圧のデューティよりも低いデューティを有する駆動電圧SU1,SV1,SW1をモータ51に出力し、モータ51を起動させる。これにより、モータ51が逆回転状態から起動することによりモータ51の駆動コイルLu,Lv,Lwに過渡的に流れる電流は抑制される。やがて、モータ51の回転方向は正回転となる。
【0092】
ここで、図4では、モータ51の正転側の回転数が所定回転数Aに至るよりも先に、タイマ4による計測時間が第1所定時間を経過している。従って、モータ駆動制御装置1は、第1所定時間経過時に、駆動電圧SU1,SV1,SW1のデューティを通常回転時のデューティに変更し、その後回転数制御を行っている。これにより、モータ駆動制御装置1は、モータ51の駆動コイルLu,Lv,Lwに過渡的に流れる電流を抑えながら、モータ51の回転数を所望の回転数にすることができる。
【0093】
また、図5に示すように、順風等の影響によりモータ51が起動前から正方向に回転している場合、モータ駆動制御装置1は、所定駆動電圧のデューティよりも高いデューティを有する駆動電圧SU1,SV1,SW1をモータ51に出力し、モータ51を駆動させる。これにより、モータ51に出力される駆動電圧のデューティがこの回転数において本来出力されるべき駆動電圧のデューティよりも低いために出力回路8に供給される直流電圧Vccが昇圧してしまう現象は抑制される。その後、モータ51の回転数は徐々に上昇していく。
【0094】
ここで、図5では、タイマ4による計測時間が第1所定時間を経過するよりも先に、モータ51の正転側の回転数が所定回転数Aに至っている。従って、モータ駆動制御装置1は、モータ51の回転数が所定回転数Aとなった時に、駆動電圧SU1,SV1,SW1のデューティを通常回転時のデューティに変更し、その後回転数制御を行っている。これにより、モータ駆動制御装置1は、直流電圧Vccが昇圧することなく、モータ51の回転数を所望の回転数にすることができる。
【0095】
(4)効果
このモータ駆動制御装置1は、モータ起動直前時のモータ51の回転方向に応じて、モータ51を起動させるための駆動電圧SU1,SV1,SW1のデューティや振幅等を、モータ51が無回転状態で起動する場合と異なるように調整し、モータに出力する。これにより、起動直前時、モータ51には外力が加わっており、既にモータ51が正方向または逆方向のどちらかに回転している状態において、このモータ51を起動させる場合であっても、モータ駆動制御装置1は、モータ51を異常停止させることなく確実に起動させることができる。
【0096】
また、このモータ駆動制御装置1は、モータ51の回転方向に加え、モータ起動直前時のモータ51の回転数に応じて、駆動電圧SU1,SV1,SW1を更に調整する。これにより、モータ駆動制御装置1は、モータ51をより確実に起動させることができる。
【0097】
特に、モータ駆動制御装置1は、PWM制御により、逆風等の影響を受けて逆回転方向に回転している状態のモータ51を起動させる場合には、モータ51が無回転の状態で起動する場合の所定駆動電圧よりも小さいデューティを有する駆動電圧SU1,SV1,SW1を出力する。これにより、モータ51の起動時にモータ51に過渡的に流れる電流量を抑えることができる。
【0098】
そして、モータ駆動制御装置1は、PWM制御により、順風等の影響を受けて正回転方向に回転している状態のモータ51を起動させる場合には、モータ51が無回転の状態で起動する場合の所定駆動電圧よりも大きいデューティを有する駆動電圧SU1,SV1,SW1を出力する。これにより、モータ51が起動した際に直流電圧Vccが昇圧される現象を防ぐことができる。
【0099】
また、逆回転または正回転方向に回転している状態のモータ51を起動させてから第1所定時間経過後、モータ駆動制御装置1は、通常回転時のデューティを有する駆動電圧SU1,SV1,SW1をモータ51に出力する。これにより、モータ51は確実に通常回転を行うことができる。
【0100】
また、モータ51の起動後、モータ51の正転側への回転数が所定回転数A以上となった場合、モータ駆動制御装置1は、通常回転時のデューティを有する駆動電圧をモータ51に出力する。これにより、モータ51は確実に通常回転を行うことができる。
【0101】
<第2実施形態>
図6は、第2実施形態に係るモータ駆動制御装置101と、このモータ駆動制御装置101により駆動制御されるモータ51とを含むモータの駆動制御システム200全体の構成図である。
【0102】
ここで、本実施形態に係るモータ51は、第1実施形態のモータ51と同様の構成を有しているため、図1と同一の符号を付している。即ち、モータ51は、第1実施形態と同様、空気調和装置の室外機におけるプロペラファン61の駆動源として用いられる室外機用ファンモータであって、ステータ52と、ロータ53と、3つのホール素子54a〜54cとを備えた3相のブラシレスDCモータの構成を有している。
【0103】
(1)モータ駆動制御装置の構成
モータ駆動制御装置101は、回転方向検知部102、回転数計測部103、タイマ104(第2計測手段に相当)、駆動電圧調整部105及び電源部110を備える。ここで、本実施形態に係る駆動電圧調整部105は、モータ51の回転数制御を行い、駆動電圧SU2,SV2,SW2を生成してモータ51内の駆動コイルLu,Lv,Lwに出力する。ここで、モータ51の回転数制御の方法としては、P制御、PI制御、PID制御などが挙げられるが、本実施形態では、駆動電圧調整部105がモータ51の回転数についてPI制御を行う場合を例にとる。また、駆動電圧調整部105は、記憶部106、PI制御部107、ゲート制御電圧生成部108及び出力回路109を備える。
【0104】
尚、回転方向検知部102、回転数計測部103、タイマ104、ゲート制御電圧生成部108、出力回路109及び電源部110については、第1実施形態で同じ名称を付して示した図1に係る回転方向検知部2、回転数計測部3、タイマ4、ゲート制御電圧生成部7、出力回路8及び電源部9と同様の構成を有するため、詳細な説明を省略する。
【0105】
以下より、本実施形態の一特徴である記憶部106及びPI制御部107について説明する。
【0106】
記憶部106には、PI制御部107により実行されるプログラムが記憶されている。また記憶部106は、PI制御部107により調節された各種PI制御パラメータ等を記憶することができる。ここで、PI制御パラメータとしては、現時点での回転数と指令回転数との偏差を増幅させる際に用いられる比例パラメータ、回転数の偏差の累積値を積分する際に用いられる積分パラメータ、及び回転数の偏差の上限値を示す偏差制限値等が挙げられる。指令回転数は、例えば空気調和装置の室外機等の、モータ駆動制御装置101外部から入力されるものである。
【0107】
PI制御部107は、CPUを含むマイクロコンピュータからなり、モータ51の回転方向や回転数に基づいて各種PI制御パラメータを調節する。そして、PI制御部107は、調節された各種PI制御パラメータに基づいて、モータ51の回転数をPI制御する。より具体的には、PI制御部107は、調節されたPI制御パラメータに基づいて駆動電圧SU2,SV2,SW2のデューティを決定し、このデューティを示すPWMデューティ電圧v_dutyをゲート制御電圧生成部108に出力する。
【0108】
ここで、PI制御パラメータと駆動電圧SU2,SV2,SW2のデューティとは、相関関係にある。従って、PI制御パラメータが小さい程、駆動電圧SU2,SV2,SW2のデューティは小さくなる。逆に、PI制御パラメータが大きい程、駆動電圧SU2,SV2,SW2のデューティは大きくなる。
【0109】
〔PI制御パラメータの調節〕
以下に、本実施形態に係るPI制御部107が、モータ51を起動させる時に、PI制御パラメータをどのように調節するかについて説明する。PI制御部107は、モータ51を起動させる時、先ずはモータ51起動直前、即ち現在のモータ51の回転方向及び回転数を回転方向検知部2及び回転数計測部3からそれぞれ取得し、次いで取得した回転方向及び回転数を図7に当てはめ、PI制御パラメータを決定する。図7は、モータ51起動直前におけるモータ51の各回転方向への回転数(rpm)と、モータ51を起動する時に用いられるPI制御パラメータとの関係を示している。図7によると、モータ51起動直前におけるモータ51の回転方向が逆回転方向である場合、モータ51を起動する時に用いられるPI制御パラメータは、モータ51が無回転の状態で起動する時に用いられる所定のPI制御パラメータK1(第1所定制御パラメータ、第2所定制御パラメータに相当)よりも低い。特に、モータ51起動直前におけるモータ51の逆回転方向への回転数が多い程、モータ51を起動する時に用いられるPI制御パラメータはより低くなっている。逆に、モータ51起動直前におけるモータ51の回転方向が正回転方向である場合、モータ51を起動する時に用いられるPI制御パラメータは、所定のPI制御パラメータK1よりも高い。特に、モータ51起動直前におけるモータ51の正回転方向への回転数が多い程、モータ51を起動する時に用いられるPI制御パラメータはより高くなっている。
【0110】
ここで、モータ51が無回転状態で起動する場合としては、第1実施形態と同様、モータ51により駆動されるプロペラファン61が逆風や順風等の外力の影響を受けていない、いわゆる無風状態において、モータ51が起動する場合が挙げられる。従って、仮にモータ51を起動させる時に、モータ51起動直前における回転数が“0rpm”であれば、モータ51は無回転状態から起動したことになり、PI制御部107は、モータ51を起動させる時に用いるPI制御パラメータを、所定のPI制御パラメータK1に決定する。尚、所定のPI制御パラメータK1は、モータ51の音や振動などを考慮して決定されることができる。
【0111】
図7によると、逆風等の影響でプロペラファン61に逆回転方向への外力が加わったため、モータ51が逆回転方向に回転している場合、PI制御部107は、モータ51の逆回転側への回転数に応じて、モータ51を起動させる時のPI制御パラメータを所定のPI制御パラメータK1より小さくなるように決定する。逆に、順風等の影響でプロペラファン61に正回転方向への外力が加わったため、モータ51が正回転方向に回転している場合、PI制御部107は、モータ51の正回転側への回転数に応じて、モータ51を起動させる時のPI制御パラメータを所定のPI制御パラメータK1より大きくなるように決定する。尚、PI制御パラメータは、図7では回転数に応じてリニアに変化しているが、これに限定されず、一部或いは全領域において段階的に変化してもよい。
【0112】
また、PI制御部107は、モータ51の起動後、モータ51の回転数やタイマ104の計測時間が所定の条件を満たした場合には、PI制御パラメータを、モータ51の通常回転時におけるPI制御パラメータK2に変更する。ここで、所定の条件としては、第1実施形態と同様、例えば以下のものが挙げられる。
(I)タイマ104による計測時間が第2所定時間を経過した場合。
(II)モータ51の正回転側への回転数が所定回転数B(第3所定数に相当)以上となった場合。
(III)逆回転方向に回転しているモータ51を起動させた後、モータ51の回転が正回転側に切り替わった場合(即ち、回転数が“0rpm”となった場合)
尚、本実施形態では、第1実施形態と同様に、以下より、所定の条件(I)及び(II)が満たされる場合について説明する。
【0113】
また、所定のPI制御パラメータK1及び通常回転時のPI制御パラメータK2は、同じ値であってもよいし、異なる値であってもよい。
【0114】
(2)モータ駆動制御装置の動作
(2−1)一連の動作の流れ
図8は、モータ駆動制御装置101が行う一連の動作の流れを説明するためのフローチャートである。
【0115】
ステップS101〜102:モータ駆動制御装置101は、モータ駆動制御装置101外部からモータ51の起動指示及び指令回転数を取得すると(S101)、回転方向検知部102及び回転数計測部103は、起動直前、即ち現在のモータ51の回転方向及び回転数を、それぞれ検知及び計測する(S102)。
【0116】
ステップS103〜104:駆動電圧調整部105のPI制御部107は、ステップS102で検知及び計測されたモータ51の回転方向及び回転数を図7に当てはめ、モータ51を起動するために用いるPI制御パラメータを決定し、これを記憶部106に記憶する(S103)。PI制御部107により決定されたPI制御パラメータに基づく駆動信号SU2,SV2,SW2は、ゲート制御電圧生成部108及び出力回路109を経てモータ51に出力される(104)。これにより、モータ51は起動する。そして、タイマ104は、時間の計測を開始する。
【0117】
ステップS105:PI制御部107は、モータ51の回転数についてPI制御を行う。尚、PI制御の詳細な動作については、後述する。
【0118】
ステップS106〜109:タイマ104の計測時間、モータ51の回転数及び回転方向が所定の条件を満たした場合、PI制御部107は、PI制御パラメータをモータ51の通常回転時のPI制御パラメータK2に変更する(S108)。そして、PI制御部107は、このPI制御パラメータK2に基づいてPI制御を行う(S109)。これにより、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2は、ゲート制御電圧生成部108及び出力回路109を経てモータ51内の各駆動コイルLu,Lv,Lwに出力される。ここで、所定の条件には、(I)タイマ104の計測時間が第2所定時間を経過した場合(S106)、(II)正転側への回転数が所定回転数B以上となった場合(S107)が該当する。尚、タイマ104の計測時間やモータ51の回転数及び回転方向が、ステップS106及びS107のいずれも満たさない場合、モータ駆動制御装置101は、ステップS105以降の動作を行う。
【0119】
ステップS110:モータ駆動制御装置101は、モータ51の回転停止指示を取得した場合、モータ51の回転を停止させ、一連の動作を終了する。
【0120】
〔PI制御動作〕
図9は、上記動作のステップS105,S109におけるPI制御動作の流れを示すフローチャートである。尚、下記の各動作の過程において得られた演算結果は、記憶部106に一時的に格納される。
【0121】
ステップS121:PI制御部107は、外部から取得した指令回転数から現在のモータ51の回転数を減算し、回転数の偏差を求める。
【0122】
ステップS122〜123:回転数の偏差が偏差制限値以上である場合(S122)、PI制御部107は、偏差を偏差制限値に置き換える(S123)。回転数の偏差が偏差制限値未満の場合は、ステップS121で求められた偏差が、以降の演算で用いられる。
【0123】
ステップS124:PI制御部107は、ステップS121またはステップ123で求められた偏差に、PI制御パラメータである比例パラメータを乗算して、比例項を求める。
【0124】
ステップS125:PI制御部107は、ステップS121またはステップ123で求められた偏差に、PI制御パラメータである積分パラメータを乗算し、これに前回求めた積分項を加算し、積分項を求める。
【0125】
ステップS126:PI制御部107は、ステップS124で求めた比例項にステップS125で求めた積分項を加算し、駆動電圧SU2,SV2,SW2のデューティを決定する。
【0126】
(2−2)調節されたPI制御パラメータ及び回転数の一例
モータ駆動制御装置101が上記動作の流れでモータ51を駆動制御した場合の一例を、図10及び図11に示す。図10は、起動前から逆方向に回転しているモータ51を起動させた場合の、経時的に変化するPI制御パラメータ、モータ51の回転数及びモータ51内の駆動コイルLu,Lv,Lwに流れる電流を示した図である。図11は、起動前から正方向に回転しているモータ51を起動させた場合の、経時的に変化するPI制御パラメータ、モータ51の回転数、及び電源部110からの直流電圧Vccを示した図である。尚、図10及び図11では、所定のPI制御パラメータK1及び通常回転時のPI制御パラメータK2が、異なる値である場合を例にとる。
【0127】
図10に示すように、逆風等の影響によりモータ51が起動前から逆方向に回転している場合、モータ駆動制御装置101は、PI制御パラメータを所定のPI制御パラメータK1よりも低い値に決定し、このPI制御パラメータに基づいてPI制御を行う。これにより、モータ51を起動させる時には、無回転状態のモータ51を起動させる場合の所定駆動電圧よりも低いデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。そのため、モータ51が逆回転状態から起動することによりモータ51の駆動コイルLu,Lv,Lwに過渡的に流れる電流は抑制される。やがて、モータ51の回転方向は正回転となる。
【0128】
ここで、図10では、タイマ104による計測時間が第2所定時間を経過するよりも先に、モータ51の正転側の回転数が所定回転数Bに至っている。従って、モータ駆動制御装置101は、モータ51の正回転側の回転数が所定回転数Bとなった時に、PI制御パラメータを通常回転時のPI制御パラメータK2に変更し、PI制御を行う。これにより、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。従って、モータ駆動制御装置101は、モータ51の駆動コイルLu,Lv,Lwに過渡的に流れる電流を抑えながら、モータ51の回転数を所望の回転数にすることができる。
【0129】
また、図11に示すように、順風等の影響によりモータ51が起動前から正方向に回転している場合、モータ駆動制御装置101は、PI制御パラメータを所定のPI制御パラメータK1よりも高い値に決定し、このPI制御パラメータに基づいてPI制御を行う。これにより、モータ51を起動させる時には、無回転状態のモータ51を起動させる場合の所定駆動電圧よりも高いデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力され、モータ51に出力される駆動電圧のデューティがこの回転数において本来出力されるべき駆動電圧のデューティよりも低いために出力回路109に供給される直流電圧Vccが昇圧してしまう現象は抑制される。その後、モータ51の回転数は徐々に上昇していく。
【0130】
ここで、図11では、モータ51の正転側の回転数が所定回転数Bに至るよりも先に、タイマ104による計測時間が第2所定時間を経過している。従って、モータ駆動制御装置101は、第2所定時間経過時に、PI制御パラメータを通常回転時のPI制御パラメータK2に変更し、PI制御を行う。これにより、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。従って、モータ駆動制御装置101は、直流電圧Vccが昇圧することなく、モータ51の回転数を所望の回転数にすることができる。
【0131】
(3)効果
このモータ駆動制御装置101は、逆風等の影響を受けて逆方向に回転している状態のモータ51を起動させる場合、モータ51起動直前のモータ51の回転方向及び回転数に応じて、PI制御パラメータを、無回転状態のモータ51を起動させる場合に用いられる所定のPI制御パラメータK1よりも小さくなるように調節する。そして、モータ駆動制御装置101は、調節後のPI制御パラメータに基づいてPI制御を行う。これにより、モータ51の起動を起動させる時には、所定のPI制御パラメータK1に基づく所定駆動電圧よりも小さいデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。従って、モータ51が逆回転している状態で起動する際、モータ51に過渡的に流れる電流量を抑えることができる。
【0132】
また、モータ駆動制御装置101は、順風等の影響を受けて正方向に回転している状態のモータ51を起動させる場合、モータ51起動直前のモータ51の回転方向及び回転数に応じて、PI制御パラメータを、無回転状態のモータ51を起動させる場合に用いられる所定のPI制御パラメータK1よりも大きくなるように調節する。そして、モータ駆動制御装置101は、調節後のPI制御パラメータに基づいてPI制御を行う。これにより、モータ51を起動させる時には、所定のPI制御パラメータK1に基づく所定駆動電圧よりも大きいデューティを有する駆動電圧SU2,SV2,SW2がモータ51に出力される。従って、モータ51が正回転している状態で起動する際、駆動電圧SU2,SV2,SW2のデューティが小さいために直流電圧Vccが昇圧される現象を抑制できる。
【0133】
また、モータ駆動制御装置101は、モータ51の回転数についてP制御、PI制御及びPID制御のいずれか1つを行うため、モータ51を的確に制御することができる。
【0134】
また、モータ駆動制御装置101は、モータ51が起動してから第2所定時間経過後、PI制御パラメータを通常回転時のPI制御パラメータK2に変更し、これに基づいてPI制御を行う。これにより、モータ51には、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2が出力される。従って、モータ51は確実に通常回転を行うことができる。
【0135】
また、モータ駆動制御装置101は、モータ51の正転側への回転数が所定回転数B以上となった場合、PI制御パラメータを通常回転時のPI制御パラメータK2に変更する。これにより、モータ51には、通常回転時のデューティを有する駆動電圧SU2,SV2,SW2が出力される。従って、モータ51は確実に通常回転を行うことができる。
【0136】
<その他の実施形態>
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0137】
(a)上記第1実施形態では、モータ駆動制御装置1がPWM制御を行う場合について記載したが、これに限定されない。本発明のモータ駆動制御装置は、駆動電圧の振幅を制御する、いわゆるPAM(Pulse-Amplitude Modulation)制御を行っても良い。
【0138】
図12は、PAM制御を行うモータ駆動制御装置201と、このモータ駆動制御装置201により駆動制御されるモータ51とを含むモータの駆動制御システム300の構成図である。図12に示すように、モータ駆動制御装置201は、PWM制御部の代わりにPAM制御部206を備える。尚、モータ駆動制御装置201のその他の構成については、第1実施形態と同様である。即ち、モータ駆動制御装置201は、回転方向検知部202、回転数計測部203、タイマ204、駆動制御調整部205、及び電源部209を備える。特に、電源部209は、モータ51の回転数や駆動信号の振幅等に応じて直流電源Vccを昇圧する昇圧回路などを含む。また、駆動制御調整部205は、PAM制御部206、ゲート制御電圧生成部207及び出力回路208を含む。特に、PAM制御部206は、電源部209が直流電圧Vccを調整するための信号も生成する。また、モータ51は、第1実施形態と同様の構成を有しており、図1と同じ符号を付している。
【0139】
このモータ駆動制御装置201では、モータ51起動直前におけるモータ51が逆回転方向に回転している場合、駆動電圧調整部205は、モータ51起動直前の回転数に応じて、駆動電圧SU3,SV3,SW3の振幅が、無回転状態のモータ51を起動させる時の所定駆動電圧より小さくなるように調整する。これにより、第1実施形態と同様、例えば逆風の影響を受けて逆方向に回転しているモータ51を起動させる場合であっても、モータ51に流れる電流量が過渡的に増加することを抑制できる。
【0140】
また、モータ51起動直前におけるモータ51が正回転方向に回転している場合、駆動電圧調整部205は、モータ51起動直前の回転数に応じて、駆動電圧SU3,SV3,SW3の振幅が、無回転状態のモータ51を起動させる時の所定駆動電圧より大きくなるように調整する。これにより、第1実施形態と同様、例えば順風の影響を受けて正方向に回転しているモータ51を起動させる場合であっても、電源部209からの直流電圧が昇圧されることを防ぐことができる。
【0141】
更に、本発明に係るモータ駆動制御装置は、PWM制御とPAM制御とを同時に行うような構成であってもよい。即ち、モータ駆動制御装置は、モータ起動時の駆動電圧のデューティと振幅とを、起動直前におけるモータの回転数及び回転方向に応じて共に変化させてもよい。
【0142】
(b)また、上記第2実施形態においても、モータ制御駆動装置101がPI制御パラメータに基づいてPI制御を行うことで、駆動電圧のデューティが変更される場合について説明したが、このようにPI制御やPID制御などの回転数制御を行う場合においても、その他の実施形態(a)と同様、駆動電圧の振幅のみが変更されたり、デューティ及び振幅の両方が変更されたりしてもよい。
【0143】
(c)上記第1実施形態では、起動直前に正方向に回転しているモータ51を起動させる時に、直流電圧の昇圧動作が生じるとして説明したが、逆風等の影響を受けて逆回転しているモータ51を起動させた際においても、場合によっては直流電圧の昇圧動作が生じてしまう時がある。そこで、このような現象が生じる時には、モータ駆動制御装置1は、起動直前に逆回転方向に回転しているモータ51を起動させる際、図13に示すように、モータ51に出力する駆動電圧SU1,SV1,SW1のデューティを、所定駆動電圧よりも大きくする。これにより、モータ51が起動直前に逆回転している状態からモータ51を起動させた場合に、電源からの直流電圧の昇圧動作が生じることを防ぐことができる。
【0144】
また、上記において、モータ駆動制御装置1は、駆動電圧SU1,SV1,SW1のデューティではなく振幅を所定駆動電圧より大きくしてもよい。これにより、上記と同様、モータ51が起動直前に逆回転している状態からモータを起動させた場合に、直流電圧の昇圧動作が生じることを防ぐことができる。
【0145】
(d)また、上記第2実施形態に係るモータ駆動制御装置101においても、逆風等の影響を受けて逆回転しているモータ51を起動させた場合に直流電圧の昇圧動作が生じてしまう際には、図14に示すように、PI制御パラメータを所定のPI制御パラメータK1よりも大きくするとよい。これにより、その他の実施形態(c)と同様、モータ51起動時にモータ51に出力される駆動電圧のデューティや振幅は所定駆動電圧よりも大きくなるため、電源からの直流電圧の昇圧動作が生じることを防ぐことができる。
【0146】
(e)上記第1実施形態では、図3に示すように、タイマ4の計測時間が第1所定時間を経過した場合(S5)、またはモータ51の正転側への回転数が所定回転数Aとなった場合(S6)に、駆動電圧SU1,SV1,SW1のデューティがモータ51の通常回転時の駆動電圧のデューティに変更される場合について説明した。しかし、モータ駆動制御装置1は、更に以下の条件(IV)を満たした場合に、駆動電圧SU1,SV1,SW1のデューティをモータ51の通常回転時の駆動電圧のデューティに変更してもよい。
(IV)モータ51が逆方向に回転している状態で起動した場合に、モータ51の逆回転方向側への回転数が所定回転数C(第2所定数に相当)以下となった場合。
【0147】
この条件が満たされた場合の、経時的に変化する駆動電圧SU1,SV1,SW1のデューティ、モータ51の回転数及びモータ51内に流れる電流を、図15に示す。図15では、モータ駆動制御装置1は、起動直前に逆方向に回転しているモータ51を起動させている。そして、タイマ4の計測時間が第1所定時間を経過したり、モータ51の正転側の回転数が所定回転数Aに至ったりするよりも先に、モータ51の逆回転側の回転数は所定回転数C以下となっている。この時、モータ駆動制御装置1は、モータ51について回転数制御を行う。この回転数制御により、モータ51には、通常回転時のデューティを有する駆動電圧SU1,SV1,SW1が出力される。このように、モータ駆動制御装置1は、条件(IV)を満たした場合に通常回転時の駆動電圧SU1,SV1,SW1を出力しても、モータ51を確実に通常回転させることができる。
【0148】
(f)また、上記第2実施形態に係るモータ駆動制御装置101においても、逆方向に回転しているモータ51を起動させた後、モータ51の逆回転方向側への回転数が所定回転数D(第4所定数に相当)以下となった場合には、PI制御パラメータを通常回転時のPI制御パラメータK2に変更することができる(図16)。これにより、その他の実施形態(e)と同様、モータ駆動制御装置101は、モータ51を確実に通常回転させることができる。
【0149】
(g)上記第2実施形態では、モータ51の回転数及び回転方向などが所定の条件(I),(II)を満たすまでの間、PI制御パラメータが調節される場合について説明したが、所定の条件(I),(II)を満たすまでの間のPI制御パラメータは、図17示すように、除々に通常回転時のデューティに近づくように、その時々のモータ51の回転数及び回転方向に応じて変更されてもよい。
【0150】
図17では、起動前のモータは逆方向に回転しており、PI制御パラメータは、先ず所定のPI制御パラメータK1よりも低い値に決定されている。そしてその後、モータの正転側への回転数の上昇に応じて、PI制御パラメータが通常回転時のPI制御パラメータK2に近づくように調節されている。これにより、モータに出力される駆動電圧のデューティや振幅は、通常回転時のデューティや振幅に除々に近づいていく。そのため、モータが逆回転状態から起動することによりモータの駆動コイルに過渡的に流れる電流を抑えることができる。
【0151】
(h)上記第1及び第2実施形態では、モータを起動するための駆動電圧及びPI制御パラメータが、モータ起動直前におけるモータの回転方向及び回転数に応じて調節されると記載したが、この駆動電圧及びPI制御パラメータは、モータ起動直前におけるモータの回転方向のみに応じて調節されてもよい。
【0152】
(i)上記第1及び第2実施形態では、モータ51がブラシレスDCモータである場合を例に取り説明したが、モータ51は誘導電動機等の他の種類のモータであってもよい。特に、モータが直流モータである場合、駆動電圧は、一定の電圧であることができる。
【0153】
(j)第1及び第2実施形態では、出力回路8、109内のスイッチング素子として絶縁ゲート型バイポーラトランジスタQ1〜Q6,Q11〜Q16を用いた場合について記載したが、スイッチング素子は、MOSFET等の他の種類の素子を用いてもよい。また、第1及び第2実施形態では、Nchの絶縁ゲート型バイポーラトランジスタQ1〜Q6,Q11〜Q16を用いた場合について記載したが、Pchのトランジスタを用いてもよい。
【産業上の利用可能性】
【0154】
本発明に係るモータ駆動制御装置は、例えば空気調和装置内の圧縮機やファン等の回転駆動源として用いられるモータの駆動を制御するための装置として適用できる。
【符号の説明】
【0155】
1,101,201 モータ駆動制御装置
2,102,202 回転方向検知部
3,103,203 回転数計測部
4,104,204 タイマ
5,105,205 駆動電圧調整部
6 PWM制御部
7,108,207 ゲート制御電圧生成部
8,109,208 出力回路
9,110,209 電源部
51 モータ
52 ステータ
53 ロータ
54a〜54c ホール素子
61 プロペラファン
100,200,300 モータ駆動制御システム
106 記憶部
107 PI制御部
206 PAM制御部
Lu,Lv,Lw 駆動コイル
SU1,SV1,SW1 SU2,SV2,SW2 SU3,SV3,SW3 駆動電圧
【先行技術文献】
【特許文献】
【0156】
【特許文献1】特開平8−303386号公報
【特許請求の範囲】
【請求項1】
正回転方向または逆回転方向に回転可能なモータ(51)を駆動させるための駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)を出力して前記モータ(51)の駆動を制御するモータ駆動制御装置(1)であって、
前記モータ(51)起動直前の回転方向を検知する回転方向検知手段(2,102,202)と、
前記回転方向検知手段(2,102,202)により検知された前記モータ(51)の起動直前の回転方向に応じて、前記モータ(51)起動時の前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)が、前記モータ(51)が無回転の状態で起動する場合に前記モータ(51)に出力される所定駆動電圧と異なるように調整する駆動電圧調整手段(5,105,205)と、
を備え、
前記駆動電圧調整手段は、前記モータの起動直前の回転方向に応じて、前記モータ(51)の回転数を制御するための制御パラメータを、前記モータ(51)が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された前記制御パラメータに基づいて前記モータ起動時の前記駆動電圧を更に調整することで、前記モータ起動時の前記駆動電圧が前記所定駆動電圧と異なるように調整する、
モータ駆動制御装置(1,101,201)。
【請求項2】
前記モータ(51)起動直前の前記モータの回転数を計測する回転数計測手段(3)を更に備え、
前記駆動電圧調整手段(5,105,205)は、前記モータ(51)起動直前の前記モータの回転数に応じて前記制御パラメータを更に調節することで、前記モータ(51)起動時の前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)を更に調整する、請求項1に記載のモータ駆動制御装置(1,101,201)。
【請求項3】
前記駆動電圧調整手段(5,105,205)は、前記モータ起動直前の前記モータの回転数が逆回転方向である場合、前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)が前記所定駆動電圧よりも小さくなるように、前記制御パラメータを前記所定制御パラメータよりも小さくなるよう調節する、請求項1または2に記載のモータ駆動制御装置(1,101,201)。
【請求項4】
前記駆動電圧調整手段(105)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記制御パラメータを前記所定制御パラメータよりも小さくなるように調節する、請求項3に記載のモータ駆動制御装置(101)。
【請求項5】
前記駆動電圧調整手段(5)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU1,SV1,SW1)のデューティが前記所定駆動電圧のデューティより小さくなるように、前記制御パラメータを前記所定制御パラメータよりも小さくなるよう調節する、請求項4に記載のモータ駆動制御装置(1)。
【請求項6】
前記駆動電圧調整手段(205)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU3,SV3,SW3)の振幅が前記所定駆動電圧の振幅より小さくなるように、前記制御パラメータを前記所定制御パラメータよりも小さくなるよう調節する、請求項4または5に記載のモータ駆動制御装置(201)。
【請求項7】
前記駆動電圧調整手段(5,105,205)は、前記モータ起動直前の前記モータの回転数が逆回転方向である場合、前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)が前記所定駆動電圧よりも大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項1または2に記載のモータ駆動制御装置(1,101,201)。
【請求項8】
前記駆動電圧調整手段(105)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記制御パラメータを前記所定制御パラメータよりも大きくなるように調節する、請求項7に記載のモータ駆動制御装置(101)。
【請求項9】
前記駆動電圧調整手段(5)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU1,SV1,SW1)のデューティが前記所定駆動電圧のデューティより大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項8に記載のモータ駆動制御装置(1)。
【請求項10】
前記駆動電圧調整手段(205)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU3,SV3,SW3)の振幅が前記所定駆動電圧の振幅より大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項8または9に記載のモータ駆動制御装置(201)。
【請求項11】
前記駆動電圧調整手段(5,105,205)は、前記モータ起動直前の前記モータの回転数が正回転方向である場合、前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)が前記所定駆動電圧よりも大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項1または2に記載のモータ駆動制御装置(1,101,201)。
【請求項12】
前記駆動電圧調整手段(105)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記制御パラメータを前記所定制御パラメータよりも大きくなるように調節する、請求項11に記載のモータ駆動制御装置(101)。
【請求項13】
前記駆動電圧調整手段(5)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU1,SV1,SW1)のデューティが前記所定駆動電圧のデューティより大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項12に記載のモータ駆動制御装置(1)。
【請求項14】
前記駆動電圧調整手段(205)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU3,SV3,SW3)の振幅が前記所定駆動電圧の振幅より大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項12または13に記載のモータ駆動制御装置(201)。
【請求項15】
前記モータ(51)が起動してからの時間を計測する計測手段(104)を更に備え、
前記第1計測手段(104)により計測されている時間が所定時間を経過した場合、前記駆動電圧調整手段(105)は、前記制御パラメータが前記モータ通常回転時の制御パラメータとなるように調節することで、前記駆動電圧(SU2〜SW2)を前記モータ(51)の通常回転時の駆動電圧に変更する、請求項3〜14のいずれかに記載のモータ駆動制御装置(101)。
【請求項16】
前記モータ(51)の起動後、前記モータ(51)の正回転側への回転数が第1所定数以上となった場合、前記駆動電圧調整手段(105)は、前記制御パラメータが前記モータ通常回転時の制御パラメータとなるように調節することで、前記駆動電圧(SU2〜SW2)を前記モータ(51)の通常回転時の駆動電圧に変更する、請求項3〜14のいずれかに記載のモータ駆動制御装置(101)。
【請求項17】
前記モータ(51)起動後、前記モータ(51)の逆回転側への回転数が第2所定数以下となった場合、前記駆動電圧調整手段(5,205)は、前記制御パラメータが前記モータ通常回転時の制御パラメータとなるように調節することで、前記駆動電圧(SU1〜SW1,SU3〜SW3)を前記モータ(51)の通常回転時の駆動電圧に変更する、請求項3〜10のいずれかに記載のモータ駆動制御装置(1,201)。
【請求項18】
前記駆動電圧調整手段(105)は、前記モータ(51)起動後の前記モータ(51)の回転数及び回転方向に応じて、前記制御パラメータが前記モータ(51)通常回転時の制御パラメータに近づくように調節することで、前記駆動電圧(SU1〜SW1,SU3〜SW3)が前記モータ(51)の通常回転時の駆動電圧に近づくようにする、請求項3〜14のいずれかに記載のモータ駆動制御装置(101)。
【請求項19】
前記駆動電圧調整手段(105)は、前記モータ(51)の回転数について、P制御、PI制御及びPID制御のうちいずれか1つの制御を行う、請求項1〜18のいずれかに記載のモータ駆動制御装置(101)。
【請求項20】
前記モータ(51)はファンモータである、請求項1〜19のいずれかに記載のモータ駆動制御装置(1,101,201)。
【請求項21】
前記ファンモータは、空気調和装置の室外機に用いられる室外機用ファンモータである、請求項20に記載のモータ駆動制御装置(1,101,201)。
【請求項22】
前記モータ(51)は、ブラシレスDCモータである、請求項1〜21のいずれかに記載のモータ駆動制御装置(1,101,201)。
【請求項1】
正回転方向または逆回転方向に回転可能なモータ(51)を駆動させるための駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)を出力して前記モータ(51)の駆動を制御するモータ駆動制御装置(1)であって、
前記モータ(51)起動直前の回転方向を検知する回転方向検知手段(2,102,202)と、
前記回転方向検知手段(2,102,202)により検知された前記モータ(51)の起動直前の回転方向に応じて、前記モータ(51)起動時の前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)が、前記モータ(51)が無回転の状態で起動する場合に前記モータ(51)に出力される所定駆動電圧と異なるように調整する駆動電圧調整手段(5,105,205)と、
を備え、
前記駆動電圧調整手段は、前記モータの起動直前の回転方向に応じて、前記モータ(51)の回転数を制御するための制御パラメータを、前記モータ(51)が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された前記制御パラメータに基づいて前記モータ起動時の前記駆動電圧を更に調整することで、前記モータ起動時の前記駆動電圧が前記所定駆動電圧と異なるように調整する、
モータ駆動制御装置(1,101,201)。
【請求項2】
前記モータ(51)起動直前の前記モータの回転数を計測する回転数計測手段(3)を更に備え、
前記駆動電圧調整手段(5,105,205)は、前記モータ(51)起動直前の前記モータの回転数に応じて前記制御パラメータを更に調節することで、前記モータ(51)起動時の前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)を更に調整する、請求項1に記載のモータ駆動制御装置(1,101,201)。
【請求項3】
前記駆動電圧調整手段(5,105,205)は、前記モータ起動直前の前記モータの回転数が逆回転方向である場合、前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)が前記所定駆動電圧よりも小さくなるように、前記制御パラメータを前記所定制御パラメータよりも小さくなるよう調節する、請求項1または2に記載のモータ駆動制御装置(1,101,201)。
【請求項4】
前記駆動電圧調整手段(105)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記制御パラメータを前記所定制御パラメータよりも小さくなるように調節する、請求項3に記載のモータ駆動制御装置(101)。
【請求項5】
前記駆動電圧調整手段(5)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU1,SV1,SW1)のデューティが前記所定駆動電圧のデューティより小さくなるように、前記制御パラメータを前記所定制御パラメータよりも小さくなるよう調節する、請求項4に記載のモータ駆動制御装置(1)。
【請求項6】
前記駆動電圧調整手段(205)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU3,SV3,SW3)の振幅が前記所定駆動電圧の振幅より小さくなるように、前記制御パラメータを前記所定制御パラメータよりも小さくなるよう調節する、請求項4または5に記載のモータ駆動制御装置(201)。
【請求項7】
前記駆動電圧調整手段(5,105,205)は、前記モータ起動直前の前記モータの回転数が逆回転方向である場合、前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)が前記所定駆動電圧よりも大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項1または2に記載のモータ駆動制御装置(1,101,201)。
【請求項8】
前記駆動電圧調整手段(105)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記制御パラメータを前記所定制御パラメータよりも大きくなるように調節する、請求項7に記載のモータ駆動制御装置(101)。
【請求項9】
前記駆動電圧調整手段(5)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU1,SV1,SW1)のデューティが前記所定駆動電圧のデューティより大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項8に記載のモータ駆動制御装置(1)。
【請求項10】
前記駆動電圧調整手段(205)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU3,SV3,SW3)の振幅が前記所定駆動電圧の振幅より大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項8または9に記載のモータ駆動制御装置(201)。
【請求項11】
前記駆動電圧調整手段(5,105,205)は、前記モータ起動直前の前記モータの回転数が正回転方向である場合、前記駆動電圧(SU1〜SW1,SU2〜SW2,SU3〜SW3)が前記所定駆動電圧よりも大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項1または2に記載のモータ駆動制御装置(1,101,201)。
【請求項12】
前記駆動電圧調整手段(105)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記制御パラメータを前記所定制御パラメータよりも大きくなるように調節する、請求項11に記載のモータ駆動制御装置(101)。
【請求項13】
前記駆動電圧調整手段(5)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU1,SV1,SW1)のデューティが前記所定駆動電圧のデューティより大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項12に記載のモータ駆動制御装置(1)。
【請求項14】
前記駆動電圧調整手段(205)は、更に前記モータ(51)起動直前の前記モータ(51)の回転数に応じて、前記駆動電圧(SU3,SV3,SW3)の振幅が前記所定駆動電圧の振幅より大きくなるように、前記制御パラメータを前記所定制御パラメータよりも大きくなるよう調節する、請求項12または13に記載のモータ駆動制御装置(201)。
【請求項15】
前記モータ(51)が起動してからの時間を計測する計測手段(104)を更に備え、
前記第1計測手段(104)により計測されている時間が所定時間を経過した場合、前記駆動電圧調整手段(105)は、前記制御パラメータが前記モータ通常回転時の制御パラメータとなるように調節することで、前記駆動電圧(SU2〜SW2)を前記モータ(51)の通常回転時の駆動電圧に変更する、請求項3〜14のいずれかに記載のモータ駆動制御装置(101)。
【請求項16】
前記モータ(51)の起動後、前記モータ(51)の正回転側への回転数が第1所定数以上となった場合、前記駆動電圧調整手段(105)は、前記制御パラメータが前記モータ通常回転時の制御パラメータとなるように調節することで、前記駆動電圧(SU2〜SW2)を前記モータ(51)の通常回転時の駆動電圧に変更する、請求項3〜14のいずれかに記載のモータ駆動制御装置(101)。
【請求項17】
前記モータ(51)起動後、前記モータ(51)の逆回転側への回転数が第2所定数以下となった場合、前記駆動電圧調整手段(5,205)は、前記制御パラメータが前記モータ通常回転時の制御パラメータとなるように調節することで、前記駆動電圧(SU1〜SW1,SU3〜SW3)を前記モータ(51)の通常回転時の駆動電圧に変更する、請求項3〜10のいずれかに記載のモータ駆動制御装置(1,201)。
【請求項18】
前記駆動電圧調整手段(105)は、前記モータ(51)起動後の前記モータ(51)の回転数及び回転方向に応じて、前記制御パラメータが前記モータ(51)通常回転時の制御パラメータに近づくように調節することで、前記駆動電圧(SU1〜SW1,SU3〜SW3)が前記モータ(51)の通常回転時の駆動電圧に近づくようにする、請求項3〜14のいずれかに記載のモータ駆動制御装置(101)。
【請求項19】
前記駆動電圧調整手段(105)は、前記モータ(51)の回転数について、P制御、PI制御及びPID制御のうちいずれか1つの制御を行う、請求項1〜18のいずれかに記載のモータ駆動制御装置(101)。
【請求項20】
前記モータ(51)はファンモータである、請求項1〜19のいずれかに記載のモータ駆動制御装置(1,101,201)。
【請求項21】
前記ファンモータは、空気調和装置の室外機に用いられる室外機用ファンモータである、請求項20に記載のモータ駆動制御装置(1,101,201)。
【請求項22】
前記モータ(51)は、ブラシレスDCモータである、請求項1〜21のいずれかに記載のモータ駆動制御装置(1,101,201)。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−100533(P2012−100533A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2012−33948(P2012−33948)
【出願日】平成24年2月20日(2012.2.20)
【分割の表示】特願2007−17013(P2007−17013)の分割
【原出願日】平成19年1月26日(2007.1.26)
【出願人】(000002853)ダイキン工業株式会社 (7,604)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成24年2月20日(2012.2.20)
【分割の表示】特願2007−17013(P2007−17013)の分割
【原出願日】平成19年1月26日(2007.1.26)
【出願人】(000002853)ダイキン工業株式会社 (7,604)
【Fターム(参考)】
[ Back to top ]