
モータ駆動装置及びこれを用いた電気機器
【課題】モータの急減速時や正転/逆転切換時における電源電圧の上昇を抑制する。
【解決手段】モータ駆動装置10は、電源端とモータ30との間に接続された上側トランジスタ21U、21V、21W及びモータ30と接地端との間に接続された下側トランジスタ22U、22V、22W各々のオン/オフ制御を行うロジック回路12と、電源端に印加される電源電圧VCCと所定の保護設定値との比較結果に応じた過電圧保護信号を生成してロジック回路12に送出する過電圧保護回路18とを有し、ロジック回路12は、電源電圧VCCが保護設定値を上回ったときに上側トランジスタ21U、21V、21Wをオフとして下側トランジスタ22U、22V、22Wをオンとする。
【解決手段】モータ駆動装置10は、電源端とモータ30との間に接続された上側トランジスタ21U、21V、21W及びモータ30と接地端との間に接続された下側トランジスタ22U、22V、22W各々のオン/オフ制御を行うロジック回路12と、電源端に印加される電源電圧VCCと所定の保護設定値との比較結果に応じた過電圧保護信号を生成してロジック回路12に送出する過電圧保護回路18とを有し、ロジック回路12は、電源電圧VCCが保護設定値を上回ったときに上側トランジスタ21U、21V、21Wをオフとして下側トランジスタ22U、22V、22Wをオンとする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータ駆動装置及びこれを用いた電気機器に関するものである。
【背景技術】
【0002】
モータの急制動時(急減速時やモータ駆動中の正転/逆転切替時など)に生じる電源電圧の上昇は、モータ駆動装置の出力段から電源端に逆流する回生電流が原因である。第1の従来技術では、モータ駆動装置の出力段に流れる回生電流やモータへの出力電圧を監視することで、電源電圧の上昇を間接的に監視することにより、回生電流の逆流を防止して電源電圧の上昇を抑制する構成が採用されていた。また、第2の従来技術では、一般的な同期整流PWM[pulse width modulation]駆動方式を用いずにモータの駆動制御を行うモータ駆動装置も提案されていた。
【0003】
上記に関連する従来技術の一例としては、特許文献1〜5を挙げることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3912190号明細書
【特許文献2】特開2002−272162号公報
【特許文献3】特開2003−47255号公報
【特許文献4】特開2003−134878号公報
【特許文献5】特開2007−110778号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記第1の従来技術では、モータ駆動装置の出力段に流れる回生電流やモータへの出力電圧を監視するために、専用の監視回路が必要となるため、モータ駆動装置の回路規模増大やコストアップを招くという問題があった。また、上記第1の従来技術では、電源電圧の上昇を直接的に監視しているわけではないので、検出精度の面でも向上の余地が残されていた。
【0006】
また、モータ駆動装置の出力段を形成する上側FETと下側FETの駆動信号には、貫通電流を防止する目的で、同時オン防止区間(同時オフ区間)を設けることが一般的である。そのため、同期整流PWM駆動方式を用いない上記第2の従来技術であっても、上側FETと下側FETが同時にオフするタイミングはあり得るので、電源ラインに回生電流が逆流して電源電圧が上昇する危険性を完全に払拭することはできなかった。
【0007】
本発明は、本願の発明者らにより見出された上記の問題点に鑑み、モータの急制動時における電源電圧の上昇を抑制することが可能なモータ駆動装置、及び、これを用いた電気機器を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係るモータ駆動装置は、電源端とモータとの間に接続された上側トランジスタ及び前記モータと接地端との間に接続された下側トランジスタ各々のオン/オフ制御を行うロジック回路と、前記電源端に印加される電源電圧と所定の保護設定値との比較結果に応じた過電圧保護信号を生成して前記ロジック回路に送出する過電圧保護回路と、を有し、前記ロジック回路は、前記電源電圧が前記保護設定値を上回ったときに前記上側トランジスタをオフして前記下側トランジスタをオンする構成(第1の構成)とされている。
【0009】
なお、上記第1の構成から成るモータ駆動装置において、前記ロジック回路は、ブレーキ信号が入力されたときにも前記上側トランジスタをオフとして前記下側トランジスタをオンとする構成(第2の構成)にするとよい。
【0010】
また、上記第1または第2の構成から成るモータ駆動装置において、前記ロジック回路は、前記電源電圧が所定の保護解除値を下回ったときに前記上側トランジスタ及び前記下側トランジスタ各々のオン/オフ制御を通常時の状態に復帰させる構成(第3の構成)にするとよい。
【0011】
また、上記第1または第2の構成から成るモータ駆動装置において、前記ロジック回路は、前記電源電圧が前記保護設定値を上回ってから所定時間が経過したときに前記上側トランジスタ及び前記下側トランジスタ各々のオン/オフ制御を通常時の状態に復帰させる構成(第4の構成)にするとよい。
【0012】
また、上記第1〜第4いずれかの構成から成るモータ駆動装置において、前記ロジック回路は、モード切替信号に応じて、前記上側トランジスタをオフとして前記下側トランジスタをオンとする第1過電圧保護モードと、前記上側トランジスタと前記下側トランジスタをいずれもオフとする第2過電圧保護モードと、を切り替える構成(第5の構成)にするとよい。
【0013】
また、上記第5の構成から成るモータ駆動装置において、前記ロジック回路は、前記モータの急制動時に第1過電圧保護モードとなり、その余の場合に第2過電圧保護モードとなる構成(第6の構成)にするとよい。
【0014】
また、上記第6の構成から成るモータ駆動装置において、前記ロジック回路は、前記モータの回転方向を切り替えるためのモータ回転方向切替信号、前記モータの回転速度を可変制御するためのモータ回転速度制御信号、または、前記モータの回転速度に応じた発振周波数を持つFG信号に基づいて、前記モード切替信号を生成する構成(第7の構成)にするとよい。
【0015】
また、上記第1〜第7いずれかの構成から成るモータ駆動装置において、前記過電圧保護回路には、複数の電源電圧に対応して複数の保護設定値が設定されている構成(第8の構成)にするとよい。
【0016】
また、本発明に係る電気機器は、モータと、前記モータに接続された出力段と、前記出力段を形成する上側トランジスタと下側トランジスタのオン/オフ制御を行う上記第1〜第8いずれかの構成から成るモータ駆動装置を有する構成(第9の構成)とされている。
【発明の効果】
【0017】
本発明によれば、モータの急制動時における電源電圧の上昇を抑制することが可能なモータ駆動装置、及び、これを用いた電気器を提供することができる。
【図面の簡単な説明】
【0018】
【図1】モータ駆動装置を用いた電気機器の一構成例を示すブロック図
【図2】モータ駆動装置の通電ロジックを示す真理値表
【図3】モータ駆動装置の動作を示すタイムチャート
【図4】ロジック回路の第1構成例を示すブロック図
【図5】第1構成例における過電圧保護動作を示すタイムチャート
【図6】ロジック回路の第2構成例を示すブロック図
【図7】第2構成例における過電圧保護動作を示すタイムチャート
【図8】ロジック回路の第3構成例を示すブロック図
【図9】第3構成例における過電圧保護動作を示すタイムチャート
【図10】ロジック回路の第4構成例を示すブロック図
【図11】第4構成例における過電圧保護動作を示すタイムチャート
【図12】複数電源への対応例を示す説明図
【発明を実施するための形態】
【0019】
<全体構成>
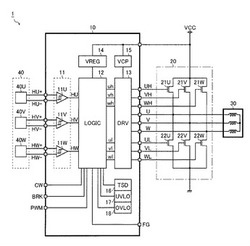
図1は、モータ駆動装置を用いた電気機器の一構成例を示すブロック図である。本構成例の電気機器1は、モータ駆動装置10と、出力段20と、モータ30と、ホールセンサ40を有する。電気機器1としては、モータ30を急減速させたり、モータ30の正転/逆転を切り換えたりする可能性のある電気機器全般(OA機器、家電製品、産業機器、その他一般民生機器など)が想定される。
【0020】
モータ駆動装置10は、ホールセンサ40から入力される3相(U相/V相/W相)の正/負ホールセンサ信号(HU+/HU−、HV+/HV−、HW+/HW−)に応じて各相の上側/下側ドライバ駆動信号(UH/UL、VH/VL、WH/WL)を生成し、これらを出力段20に出力する半導体集積回路装置である。
【0021】
出力段20は、電源端(電源電圧VCCの印加端)とモータ30との間に接続された上側トランジスタ21U、21V、21Wと、モータ30と接地端(接地電圧GNDの印加端)との間に接続された下側トランジスタ22U、22V、22Wを含む。上側トランジスタ21U、21V、21W及び下側トランジスタ22U、22V、22Wとしては、いずれもNチャネル型のパワーMOS[metal oxide semiconductor]電界効果トランジスタが用いられている。U相の上側トランジスタ21Uと下側トランジスタ22U、V相の上側トランジスタ21Vと下側トランジスタ22V、及び、W相の上側トランジスタ21Wと下側トランジスタ22Wは、各々、電源端と接地端との間に直列接続されており、各トランジスタ間の接続ノードから各相のモータ駆動電圧(U、V、W)が出力される。
【0022】
モータ30は、出力段20からのモータ駆動電圧(U、V、W)によって回転駆動される3相ブラシレスモータである。
【0023】
ホールセンサ40は、ホール効果を利用してモータ30のロータ位置を検出するセンサであり、3相のホール素子40U、40V、40Wを含む。
【0024】
<モータ駆動装置>
本構成例のモータ駆動装置10には、ホールアンプ回路11と、ロジック回路12と、プリドライバ回路13と、内部電源回路14と、チャージポンプ回路15と、過熱保護回路16と、不足電圧保護回路17と、過電圧保護回路18と、が集積化されている。
【0025】
ホールアンプ回路11は、3相のホールアンプ11U、11V、11Wを含み、ホールセンサ40から入力される各相の正/負ホールセンサ信号(HU+/HU−、HV+/HV−、HW+/HW−)を各相毎に差動増幅することで各相のホールセンサ信号(HU、HV、HW)を生成し、これらをロジック回路12に出力する。ホールアンプ11U、11V、11Wには、ノイズによる誤動作を防止するためのヒステリシス(例えば±15mV)が設けられているので、このヒステリシスを考慮してホール素子40U、40V、40Wへのバイアス電流を設定することが望ましい。なお、ホールアンプ11U、11V、11Wの差動入力端子間には、100pF〜0.01μF程度のセラミックコンデンサを接続することが望ましい。また、ホールアンプ11U、11V、11Wには、同相入力電圧範囲が設けられているので、この同相入力電圧範囲を考慮してホール素子40U、40V、40Wへのバイアス電流を設定することが望ましい。
【0026】
ロジック回路12は、各相のホールセンサ信号(HU、HV、HW)に基づいて、各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を生成し、これらをプリドライバ回路13に出力することにより、出力段20を形成する上側トランジスタ21U、21V、21Wと下側トランジスタ22U、22V、22Wのオン/オフ制御を行う。なお、ロジック回路12は、外部入力されるモータ回転方向切替信号CWに応じてモータ30の回転方向(CW[clock wise]/CCW[counter clock wise])を切り替える機能も備えている。また、ロジック回路12は、外部入力されるブレーキ信号BRKに応じてモータ30を急速に停止させる機能も備えている。また、ロジック回路12は、外部入力されるモータ回転速度制御信号PWMに応じてモータ30の回転速度(トルク)を可変制御する機能も備えている。また、ロジック回路12は、モータ30の回転速度に応じた発振周波数を持つFG信号(例えばU相のホールセンサ信号HUの波形整形信号や、各相のホールセンサ信号(HU、HV、HW)の3相合成信号)を生成する機能も備えている。また、ロジック回路12は、過熱保護回路16、不足電圧保護回路17、及び、過電圧保護回路18の各種保護信号に応じて各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする機能も備えている。また、ロジック回路12は、ホールアンプ回路11の出力が全て同一の論理レベルとなったときに、ホール入力異常と判断して各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする機能も備えている。また、ロジック回路12は、昇圧電圧VGが所定の閾値電圧を下回ったときに、昇圧異常と判断して各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする機能も備えている。
【0027】
プリドライバ回路13は、ロジック回路12から入力される各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)に所定の信号処理(レベルシフト処理、波形整形処理、同時オン禁止処理など)を施すことにより、各相の上側/下側ドライバ駆動信号(UH/UL、VH/VL、WH/WL)を生成して、これを外付けの出力段20に出力する。なお、上側ドライバ駆動信号(UH、VH、WH)の電位は、モータ駆動電圧(U、V、W)の電位を基準として決定される。
【0028】
内部電源回路14は、電源電圧VCCから内部電源電圧VREGを生成し、これをモータ駆動装置10各部(ロジック回路12など)に供給する。
【0029】
チャージポンプ回路15は、電源電圧VCCから昇圧電圧VCPを生成し、これをプリドライバ回路13に供給する。チャージポンプ回路15を備えた構成であれば、出力段20を形成する上側トランジスタ21U、21V、21Wとして、Nチャネル型MOS電界効果トランジスタを用いることが可能となる。
【0030】
過熱保護回路16(いわゆるTSD[thermal shutdown]回路)は、モータ駆動装置10のチップ温度を監視して過熱保護信号を生成し、これをロジック回路12に出力する。モータ駆動装置10のチップ温度が保護設定値(例えば175℃)以上まで上昇すると、過熱保護信号が異常時の論理レベル(例えばハイレベル)となり、これを受けたロジック回路12は各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする。一方、モータ駆動装置10のチップ温度が保護解除値(例えば150℃)以下まで低下すると、過熱保護信号が正常時の論理レベル(例えばローレベル)となり、これを受けたロジック回路12は通常動作に移行する。
【0031】
不足電圧保護回路17(いわゆるUVLO[under voltage lock out]回路)は、電源電圧VCCを監視して不足電圧保護信号を生成し、これをロジック回路12に出力する。電源電圧VCCが保護設定値(例えば6V)以下まで低下すると、不足電圧保護信号が異常時の論理レベル(例えばハイレベル)となり、これを受けたロジック回路12は各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする。一方、電源電圧VCCが保護解除値(例えば7V)以上まで上昇すると、不足電圧保護信号が正常時の論理レベル(例えばローレベル)となり、これを受けたロジック回路12は通常動作に移行する。
【0032】
過電圧保護回路18(いわゆるOVLO[over voltage lock out]回路)は、電源電圧VCCを監視して過電圧保護信号を生成し、これをロジック回路12に出力する。過電圧保護信号に応じたロジック回路12の保護動作については、後ほど詳細に説明する。
【0033】
なお、図1では明示されていないが、モータ駆動装置10には、その他の保護回路として、過電流保護回路やモータ拘束保護回路などを組み込むことも可能である。
【0034】
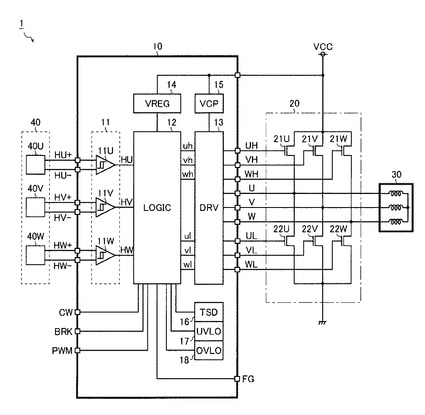
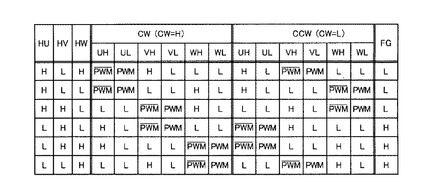
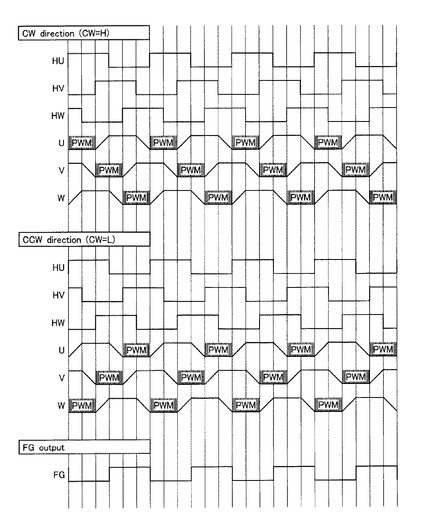
上記構成から成るモータ駆動装置10では、120°通電方式によってモータ30の駆動制御が行われる。図2は、モータ駆動装置10の通電ロジックを示す真理値表であり、図3は、モータ駆動装置10の動作を示すタイムチャートである。なお、図2において、「PWM」は、モータ回転速度制御信号PWMがハイレベルであるときにハイレベルとなり、モータ回転速度制御信号PWMがローレベルであるときにローレベルとなる。
【0035】
<過電圧保護機能>
[第1構成例]
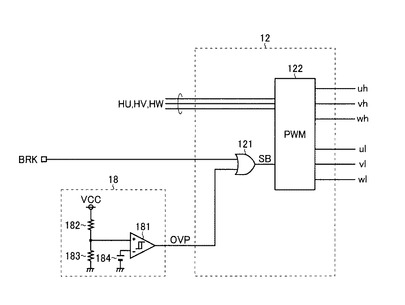
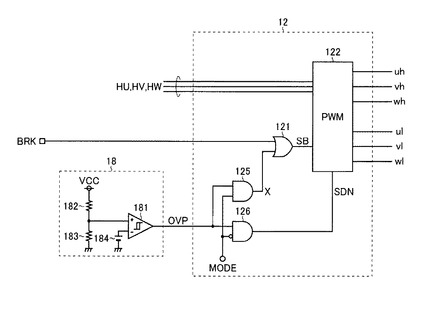
図4は、ロジック回路12の第1構成例を示すブロック図である。第1構成例のロジック回路12は、ORゲート121と、PWM信号生成部122と、を含む。
【0036】
ORゲート121は、モータ駆動装置10の外部から入力されるブレーキ信号BRKと、過電圧保護回路18から入力される過電圧保護信号OVPとの論理和演算を行うことにより、内部ショートブレーキ信号SBを生成し、これをPWM信号生成部122に送出する。すなわち、内部ショートブレーキ信号SBは、ブレーキ信号BRKがハイレベルである場合、及び、過電圧保護信号OVPがハイレベルである場合にハイレベルとなり、ブレーキ信号BRKがローレベルであって過電圧保護信号OVPがローレベルである場合にローレベルとなる。
【0037】
PWM信号生成部122は、内部ショートブレーキ信号SBがローレベルである場合には、各相のホールセンサ信号(HU、HV、HW)に応じて各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を生成し、内部ショートブレーキ信号SBがハイレベルである場合には、各相のホールセンサ信号(HU、HV、HW)に依らず、各相の上側プリドライバ駆動信号(uh、vh、wh)を全てローレベルとし、各相の下側プリドライバ駆動信号(ul、vl、wl)を全てハイレベルとする。
【0038】
過電圧保護回路18は、コンパレータ181と、抵抗182及び183と、直流電圧源184と、を含む。抵抗182及び183は、電源端(電源電圧VCCの印加端)と接地端(接地電圧GNDの印加端)との間に直列接続されている。コンパレータ181の非反転入力端(+)は、抵抗182と抵抗183との接続ノードに接続されている。コンパレータ181の反転入力端(−)は、直流電圧源184の正極端に接続されている。直流電圧源184の負極端は、接地端に接続されている。コンパレータ181の出力端は、過電圧保護信号OVPの出力端に接続されている。
【0039】
コンパレータ181は、電源電圧VCC(より正確にはその分圧電圧)と所定の閾値電圧とを比較して過電圧保護信号OVPを生成する。コンパレータ181には、ヒステリシス特性が付与されている。すなわち、過電圧保護信号OVPは、電源電圧VCCが保護設定値VthU以上まで上昇したときにハイレベルとなり、電源電圧VCCが保護解除値VthL以下まで低下したときにローレベルとなる(ただしVthU>VthL)。
【0040】
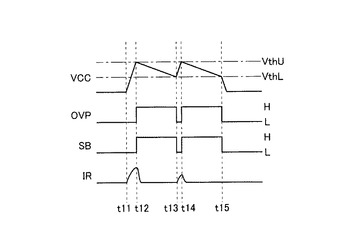
図5は、第1構成例における過電圧保護動作を示すタイムチャートであり、上から順番に、電源電圧VCC、過電圧保護信号OVP、内部ショートブレーキ信号SB、及び、回生電流IR(モータ30の急制動時に出力段20から電源端に逆流する回生電流)が描写されている。以下では、ブレーキ信号BRKがローレベルであることを前提として過電圧保護動作の説明を行う。
【0041】
時刻t11において、モータ30の急制動(急減速やモータ駆動中の正転/逆転切替など)が生じると、モータ30のコイルに蓄積されているエネルギの放出により、出力段20から電源端に向けて回生電流IRが逆流し、電源電圧VCCが上昇する。
【0042】
時刻t12において、電源電圧VCCが保護設定値VthUを上回ると、過電圧保護信号OVPがローレベルからハイレベルに立ち上がり、さらに内部ショートブレーキ信号SBがローレベルからハイレベルに立ち上がる。このとき、PWM信号生成部122は、各相の上側プリドライバ駆動信号(uh、vh、wh)を全てローレベルとし、各相の下側プリドライバ駆動信号(ul、vl、wl)を全てハイレベルとする。そして、これを受けたプリドライバ回路13は、各相の上側ドライバ駆動信号(UH、VH、WH)を全てローレベルとし、各相の下側プリドライバ駆動信号(UL、VL、WL)を全てハイレベルとする。その結果、出力段20を形成する上側トランジスタ21U、21V、21Wは全てオフとなり、下側トランジスタ22U、22V、22Wは全てオンとなる。従って、モータ30から接地端に電流を逃がすための低インピーダンスな放電経路が形成されるので、電源端に向けて逆流する回生電流IRを速やかに減少させることが可能となり、延いては、電源電圧VCCを引き下げることが可能となる。
【0043】
時刻t13において、電源電圧VCCが保護解除値VthLを下回ると、過電圧保護信号OVPがハイレベルからローレベルに立ち下がり、さらに内部ショートブレーキ信号SBがハイレベルからローレベルに立ち下がる。このとき、PWM信号生成部122は、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)を再開する。このような構成とすることにより、モータ30の急制動時において、電源電圧VCCの上昇を適切に抑制しつつ、モータ30が完全に停止してしまう事態を回避することができる。なお、時刻t13において、モータ30のコイルにエネルギが残存している場合には、出力段20から電源端に向けて回生電流IRが再び逆流し、電源電圧VCCが上昇する。
【0044】
時刻t14において、電源電圧VCCが再び保護設定値VthUを上回ると、先述の時刻t12と同じく、上側トランジスタ21U、21V、21Wが全てオフとなり、下側トランジスタ22U、22V、22Wが全てオンとなるので、電源端に向けて逆流する回生電流IRが減少して電源電圧VCCが下降に転じる。
【0045】
時刻t15において、電源電圧VCCが再び保護解除値VthLを下回ると、先述の時刻t13と同じく、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作が再開される。このとき、モータ30のコイルにエネルギが残存していなければ、出力段20から電源端に向けて回生電流IRの逆流は生じないので、以後、ホールセンサ信号(HU、HV、HW)に応じた通常のモータ駆動制御が継続される。
【0046】
上記動作を総括すると、第1構成例のロジック回路12は、電源電圧VCCが所定の保護設定値VthUを上回ったときに、上側トランジスタ21U、21V、21Wをオフして下側トランジスタ22U、22V、22Wをオンする構成であると言える。このように電源電圧VCCの上昇が検知されたときに、モータ30のコイルに蓄積されたエネルギが消費されるまで、下側トランジスタ22U、22V、22Wを全てオンさせる構成であれば、出力段20に流れる回生電流IRを接地端に向けて逃がすことができるので、モータ30の急制動時における電源電圧VCCの上昇を極めて効果的に抑制することが可能となり、延いては、モータ駆動装置10や出力段20の破壊を防止することが可能となる。
【0047】
また、上記の過電圧保護動作を実現する際には、モータ駆動装置10の保護機能として一般的に利用されている過電圧保護回路18を流用することができる。従って、回生電流IRやモータ駆動電圧(U、V、W)を監視する従来構成と異なり、専用の監視回路を別途設ける必要がないので、回路構成を非常に簡素化することが可能となる。また、上記の過電圧保護動作では、電源電圧VCCを直接的に監視することができるので、誤検出や誤動作の可能性も極めて低いと言える。
【0048】
なお、図5では、ブレーキ信号BRKがローレベルであることを前提として過電流保護動作の説明を行ったが、ロジック回路12は、ブレーキ信号BRKがハイレベルとされたときにも、上側トランジスタ21U、21V、21Wを全てオフとして下側トランジスタ22U、22V、22Wを全てオンとする。このようなオン/オフ制御により、外部からの指示によってモータ30を急速に停止させることが可能となる。
【0049】
[第2構成例]
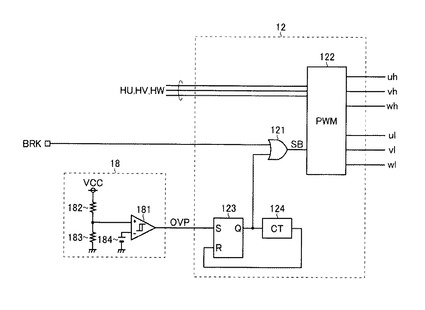
図6は、ロジック回路12の第2構成例を示すブロック図である。第2構成例のロジック回路12は、先出の第1構成例とほぼ同様の構成であり、RSフリップフロップ123とカウンタ124が追加されている点に特徴を有する。そこで、第1構成例と同様の構成要素については、図4と同一の符号を付すことで重複した説明を省略し、以下では第2構成例の特徴部分について重点的な説明を行う。
【0050】
RSフリップフロップ123のセット端(S)は、過電圧保護回路18の出力端に接続されている。RSフリップフロップ123のリセット端(R)は、カウンタ124の出力端に接続されている。RSフリップフロップ123の出力端(Q)は、ORゲート121の入力端とカウンタ124の入力端に各々接続されている。
【0051】
RSフリップフロップ123は、セット信号S(過電圧保護信号OVP)の立上がりエッジをトリガとして出力信号Qをハイレベルにセットし、リセット信号R(カウンタ124の出力信号)をトリガとして出力信号Qをローレベルにリセットする。
【0052】
カウンタ124は、出力信号Qの立上がりエッジをトリガとして所定時間T(例えば4ms)のカウント動作を開始し、所定時間Tが経過した時点でリセット信号Rにパルスを立ち上げる。
【0053】
ORゲート121は、モータ駆動装置10の外部から入力されるブレーキ信号BRKとRSフリップフロップ123から入力される出力信号Qとの論理和演算を行うことにより内部ショートブレーキ信号SBを生成し、これをPWM信号生成部122に送出する。
【0054】
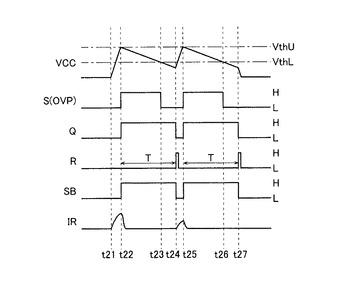
図7は、第2構成例における過電圧保護動作を示すタイムチャートであり、上から順番に、電源電圧VCC、セット信号S(過電圧保護信号OVP)、出力信号Q、リセット信号R、内部ショートブレーキ信号SB、及び、回生電流IR(モータ30の急制動時に出力段20から電源端に逆流する回生電流)が描写されている。以下では、ブレーキ信号BRKがローレベルであることを前提として過電圧保護動作の説明を行う。
【0055】
時刻t21において、モータ30の急制動(急減速やモータ駆動中の正転/逆転切替など)が生じると、モータ30のコイルに蓄積されているエネルギの放出により、出力段20から電源端に向けて回生電流IRが逆流し、電源電圧VCCが上昇する。
【0056】
時刻t22において、電源電圧VCCが保護設定値VthUを上回ると、セット信号S(過電圧保護信号OVP)がローレベルからハイレベルに立ち上がる。その結果、出力信号Qがハイレベルにセットされて内部ショートブレーキ信号SBがローレベルからハイレベルに立ち上がる。このとき、上側トランジスタ21U、21V、21Wが全てオフとなり、下側トランジスタ22U、22V、22Wが全てオンとなるので、電源端に向けて逆流する回生電流IRが減少して電源電圧VCCが下降に転じる。また、時刻t22では、出力信号Qの立上がりエッジをトリガとして、カウンタ124による所定時間Tのカウント動作が開始される。
【0057】
時刻t23において、電源電圧VCCが保護解除値VthLを下回ると、セット信号S(過電圧保護信号OVP)がハイレベルからローレベルに立ち下がる。ただし、この時点では、カウンタ124による所定時間Tのカウント動作が完了していないので、リセット信号Rはローレベルに維持されている。
【0058】
時刻t24において、カウンタ124による所定時間Tのカウント動作が完了すると、リセット信号Rにパルスが立ち上げられて、出力信号Qがローレベルにリセットされる。その結果、内部ショートブレーキ信号SBがハイレベルからローレベルに立ち下がる。このとき、PWM信号生成部122は、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)を再開する。このような構成とすることにより、先述の第1構成例と同様、モータ30の急制動時において、電源電圧VCCの上昇を適切に抑制しつつ、モータ30が完全に停止してしまう事態を回避することができる。なお、時刻t24において、モータ30のコイルにエネルギが残存している場合には、出力段20から電源端に向けて回生電流IRが再び逆流し、電源電圧VCCが上昇する。
【0059】
時刻t25において、電源電圧VCCが再び保護設定値VthUを上回ると、先述の時刻t22と同じく、上側トランジスタ21U、21V、21Wが全てオフとなり、下側トランジスタ22U、22V、22Wが全てオンとなるので、電源端に向けて逆流する回生電流IRが減少して電源電圧VCCが下降に転じる。
【0060】
時刻t26において、電源電圧VCCが保護解除値VthLを下回ると、セット信号S(過電圧保護信号OVP)がハイレベルからローレベルに立ち下がる。ただし、この時点では、カウンタ124による所定時間Tのカウント動作が完了していないので、リセット信号Rはローレベルに維持されている。
【0061】
時刻t27において、カウンタ124による所定時間Tのカウント動作が完了すると、先述の時刻t24と同じく、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)が再開される。このとき、モータ30のコイルにエネルギが残存していなければ、出力段20から電源端に向けて回生電流IRの逆流は生じないので、以後、ホールセンサ信号(HU、HV、HW)に応じた通常のモータ駆動制御が継続される。
【0062】
上記したように、第2構成例のロジック回路12は、電源電圧VCCが保護設定値VthUを上回ってから所定時間Tが経過したときに、上側トランジスタ21U、21V、21W及び下側トランジスタ22U、22V、22Wのオン/オフ制御を通常時の状態に自動復帰させる構成とされている。このような構成とすることにより、先述の第1構成例と同様、モータ30の急制動時において、電源電圧VCCの上昇を適切に抑制しつつ、モータ30が完全に停止してしまう事態を回避することができる。また、第2構成例のロジック回路12であれば、モータ30の特性に応じて所定時間Tを適宜調整することにより、電源電圧VCCの上昇抑制とモータ30の停止回避との最適化を図ることが可能となる。なお、第2構成例のロジック回路12を採用する場合、過電圧保護回路18に含まれるコンパレータ181には、ヒステリシス特性を付与しなくても構わない。
【0063】
[第3構成例]
図8は、ロジック回路12の第3構成例を示すブロック図である。第3構成例のロジック回路12は、先出の第1構成例とほぼ同様の構成(第1構成例を基礎としてモード切替機能を付加した構成)であり、ANDゲート125及び126が追加されている点に特徴を有する。そこで、第1構成例と同様の構成要素については図4と同一の符号を付すことで重複した説明を省略し、以下では第3構成例の特徴部分について重点的な説明を行う。
【0064】
ANDゲート125は、過電圧保護回路18から入力される過電圧保護信号OVPと、モード切替信号生成部(不図示)から入力されるモード切替信号MODEとの論理積演算を行うことで出力信号Xを生成し、これをORゲート121に送出する。従って、モード切替信号MODEがハイレベルの場合には、過電圧保護信号OVPが出力信号Xとしてスルー出力され、モード切替信号MODEがローレベルの場合には、過電圧保護信号OVPの論理レベルに依ることなく、出力信号Xがローレベルに固定される。
【0065】
ANDゲート126は、過電圧保護回路18から入力される過電圧保護信号OVPと、モード切替信号生成部(不図示)から反転入力されるモード切替信号MODEとの論理積演算を行うことでシャットダウン信号SDNを生成し、これをPWM信号生成部122に送出する。従って、モード切替信号MODEがローレベルの場合には、過電圧保護信号OVPがシャットダウン信号SDNとしてスルー出力され、モード切替信号MODEがハイレベルの場合には、過電圧保護信号OVPの論理レベルに依ることなく、シャットダウン信号SDNがローレベルに固定される。
【0066】
ORゲート121は、モータ駆動装置10の外部から入力されるブレーキ信号BRKと、ANDゲート125から入力される出力信号Xとの論理和演算を行うことにより、内部ショートブレーキ信号SBを生成し、これをPWM信号生成部122に送出する。
【0067】
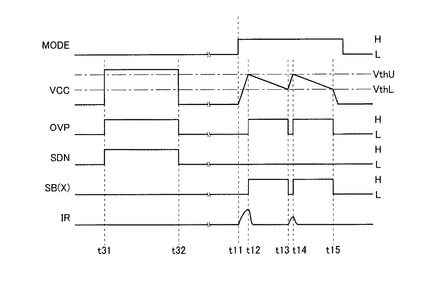
図9は、第3構成例における過電圧保護動作を示すタイムチャートであり、上から順番に、モード切替信号MODE、電源電圧VCC、過電圧保護信号OVP、シャットダウン信号SDN、内部ショートブレーキ信号SB(出力信号X)、及び、回生電流IR(モータ30の急制動時に出力段20から電源端に逆流する回生電流)が描写されている。以下ではブレーキ信号BRKがローレベルであることを前提として過電圧保護動作の説明を行う。
【0068】
時刻t31では、モータ30の急制動とは異なる原因により、電源電圧VCCに異常な上昇が生じている。このとき、モード切替信号MODEはローレベルとされているので、ANDゲート125は、過電圧保護信号OVPの論理レベルに依ることなく出力信号Xをローレベルに固定する状態となり、ANDゲート126は、過電圧保護信号OVPをシャットダウン信号SDNとしてスルー出力する状態となる。
【0069】
従って、時刻t31において、電源電圧VCCが保護設定値VthUを上回ると、過電圧保護信号OVPがローレベルからハイレベルに立ち上がり、さらにはシャットダウン信号SDNがローレベルからハイレベルに立ち上がる。このとき、PWM信号生成部122は、各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を全てローレベルとする。そして、これを受けたプリドライバ回路13は、各相の上側/下側ドライバ駆動信号(UH/UL、VH/VL、WH/WL)を全てローレベルとする。その結果、出力段20を形成する上側トランジスタ21U、21V、21W及び下側トランジスタ22U、22V、22Wは全てオフとなる。このようなシャットダウン動作を行うことにより、モータ駆動電圧(U、V、W)をいずれもハイインピーダンス状態とすることができるので、モータ30を安全に停止させることが可能となる。
【0070】
時刻t32において、電源電圧VCCが保護解除値VthLを下回ると、過電圧保護信号OVPがハイレベルからローレベルに立ち下がり、さらにはシャットダウン信号SDNがハイレベルからローレベルに立ち下がる。このとき、PWM信号生成部122は、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)を再開する。このような構成とすることにより、外部からの復帰信号を待つことなく、モータ30の駆動制御を自発的に再開することが可能となる。
【0071】
一方、時刻t11において、モータ30の急制動(急減速やモータ駆動中の正転/逆転切替など)が生じると、モード切替信号MODEがローレベルからハイレベルに立ち上げられる。その結果、時刻t11以降、ANDゲート125は、過電圧保護信号OVPを出力信号Xとしてスルー出力する状態となり、ANDゲート126は、過電圧保護信号OVPの論理レベルに依ることなくシャットダウン信号SDNをローレベルに固定する状態となる。従って、時刻t11〜t15では、先出の図5と同様の過電圧保護動作が実施されるので、出力段20に流れる回生電流IRを接地端に逃がして電源電圧VCCの上昇を抑制し、モータ駆動装置10や出力段20の破壊を防止することが可能となる。
【0072】
上記のように、第3構成例のロジック回路12は、電源電圧VCCが過電圧状態となったときの保護動作として、上側トランジスタ21U、21V、21Wをオフとして下側トランジスタ22U、22V、22Wをオンとする第1過電圧保護モード(MODE=H)と、上側トランジスタ21U、21V、21Wと下側トランジスタ22U、22V、22Wをいずれもオフとする第2過電圧保護モード(MODE=L)と、を切り替える構成とされている。より具体的に述べると、第3構成例のロジック回路12は、モータ30の急制動時に第1過電圧保護モード(MODE=H)となり、その余の場合に第2過電圧保護モード(MODE=L)となる。このような構成とすることにより、電源電圧VCCが過電圧状態に至った原因に応じて最適な保護動作を実施することができるので、モータ駆動装置10の信頼性を高めることが可能となる。
【0073】
なお、モード切替信号MODEについては、モータ駆動装置10の外部に設けられたメインコントローラ(マイコンなど)から外部入力を受ける構成としてもよいし、ロジック回路12の内部で独自に生成する構成としてもよい。後者の構成を採用する場合、ロジック回路12は、モータ回転方向切替信号CW、モータ回転速度制御信号PWMB、またはFG信号に基づいてモータ30の急制動の有無を監視し、その監視結果に応じたモード切替信号MODEを生成する構成にするとよい。また、モード切替信号MODEをハイレベルに立ち上げた後、これをローレベルに復帰させるタイミングについては、例えば、モード切替信号MODEの立上がりエッジから所定時間のカウント完了時点とすればよい。
【0074】
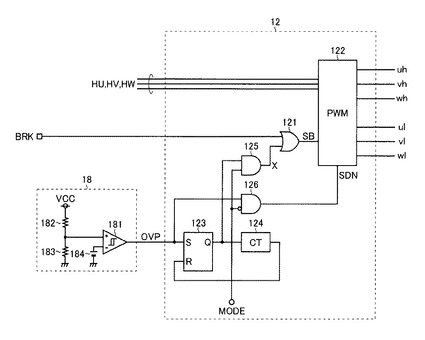
[第4構成例]
図10は、ロジック回路12の第4構成例を示すブロック図である。第4構成例のロジック回路12は、先出の第2構成例とほぼ同様の構成(第2構成例を基礎としてモード切替機能を付加した構成)であり、ANDゲート125及び126が追加されている点に特徴を有する。そこで、第2構成例と同様の構成要素については図6と同一符号を付すことで重複した説明を省略し、以下では第4構成例の特徴部分について重点的な説明を行う。
【0075】
ANDゲート125は、RSフリップフロップ回路123から入力される出力信号Qと、モード切替信号生成部(不図示)から入力されるモード切替信号MODEとの論理積演算を行うことで出力信号Xを生成し、これをORゲート121に送出する。従って、モード切替信号MODEがハイレベルの場合には、出力信号Qが出力信号Xとしてスルー出力され、モード切替信号MODEがローレベルの場合には、出力信号Qの論理レベルに依ることなく、出力信号Xがローレベルに固定される。
【0076】
ANDゲート126は、過電圧保護回路18から入力される過電圧保護信号OVPと、モード切替信号生成部(不図示)から反転入力されるモード切替信号MODEとの論理積演算を行うことでシャットダウン信号SDNを生成し、これをPWM信号生成部122に送出する。従って、モード切替信号MODEがローレベルの場合には、過電圧保護信号OVPがシャットダウン信号SDNとしてスルー出力され、モード切替信号MODEがハイレベルの場合には、過電圧保護信号OVPの論理レベルに依ることなく、シャットダウン信号SDNがローレベルに固定される。
【0077】
ORゲート121は、モータ駆動装置10の外部から入力されるブレーキ信号BRKと、ANDゲート125から入力される出力信号Xとの論理和演算を行うことにより、内部ショートブレーキ信号SBを生成し、これをPWM信号生成部122に送出する。
【0078】
なお、RSフリップフロップ123及びカウンタ124は、モード切替信号MODEがローレベルであるときに、各々の動作を停止する構成にするとよい。このような構成とすることにより、ロジック回路12の消費電力を低減することが可能となる。
【0079】
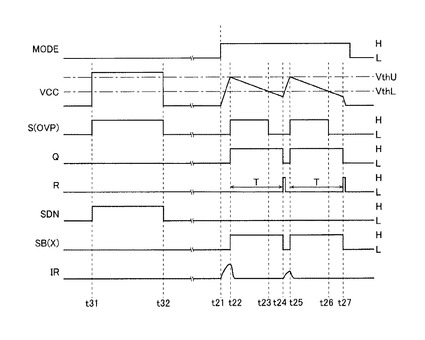
図11は、第4構成例における過電圧保護動作を示すタイムチャートであって、上から順番に、モード切替信号MODE、電源電圧VCC、セット信号S(過電圧保護信号OVP)、出力信号Q、リセット信号R、シャットダウン信号SDN、内部ショートブレーキ信号SB(出力信号X)、及び、回生電流IR(モータ30の急制動時に出力段20から電源端に逆流する回生電流)が描写されている。以下では、ブレーキ信号BRKがローレベルであることを前提として過電圧保護動作の説明を行う。
【0080】
時刻t31では、モータ30の急制動とは異なる原因により、電源電圧VCCに異常な上昇が生じている。このとき、モード切替信号MODEはローレベルとされているので、ANDゲート125は、出力信号Qの論理レベルに依ることなく出力信号Xをローレベルに固定する状態となり、ANDゲート126は、過電圧保護信号OVPをシャットダウン信号SDNとしてスルー出力する状態となる。
【0081】
従って、時刻t31において、電源電圧VCCが保護設定値VthUを上回ると、過電圧保護信号OVPがローレベルからハイレベルに立ち上がり、さらにはシャットダウン信号SDNがローレベルからハイレベルに立ち上がる。このとき、PWM信号生成部122は、各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を全てローレベルとする。そして、これを受けたプリドライバ回路13は、各相の上側/下側ドライバ駆動信号(UH/UL、VH/VL、WH/WL)を全てローレベルとする。その結果、出力段20を形成する上側トランジスタ21U、21V、21W及び下側トランジスタ22U、22V、22Wは全てオフとなる。このようなシャットダウン動作を行うことにより、モータ駆動電圧(U、V、W)をいずれもハイインピーダンス状態とすることができるので、モータ30を安全に停止させることが可能となる。
【0082】
時刻t32において、電源電圧VCCが保護解除値VthLを下回ると、過電圧保護信号OVPがハイレベルからローレベルに立ち下がり、さらにはシャットダウン信号SDNがハイレベルからローレベルに立ち下がる。このとき、PWM信号生成部122は、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)を再開する。このような構成とすることにより、外部からの復帰信号を待つことなく、モータ30の駆動制御を自発的に再開することが可能となる。
【0083】
一方、時刻t21において、モータ30の急制動(急減速やモータ駆動中の正転/逆転切替など)が生じると、モード切替信号MODEがローレベルからハイレベルに立ち上げられる。その結果、時刻t21以降、ANDゲート125は、出力信号Qを出力信号Xとしてスルー出力する状態となり、ANDゲート126は、過電圧保護信号OVPの論理レベルに依ることなくシャットダウン信号SDNをローレベルに固定する状態となる。従って、時刻t21〜t27では、先出の図7と同様の過電圧保護動作が実施されるので、出力段20に流れる回生電流IRを接地端に逃がして電源電圧VCCの上昇を抑制し、モータ駆動装置10や出力段20の破壊を防止することが可能となる。
【0084】
第4構成例のロジック回路12であれば、先述した第1〜第3構成例の作用効果をいずれも享受することができるので、モータ駆動装置10の信頼性をより一層向上させることが可能となる。
【0085】
<複数電源への対応>
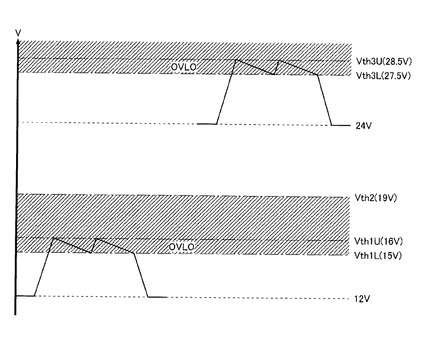
図12は、複数電源への対応例を示す説明図である。先の説明では、電源電圧VCCと比較参照される保護設定値及び保護解除値を一つずつ設定した構成を例に挙げたが、複数の電源電圧に対応する場合には、保護設定値及び保護解除値を複数設定してもよい。
【0086】
例えば、モータ駆動装置10が搭載されるアプリケーションに応じて、電源電圧VCCとして12Vまたは24Vのいずれかが印加される場合、12V電源用の保護設定値Vth1U(例えば16V)、12V電源用の下側保護解除値Vth1L(例えば15V)、12V電源用の上側保護解除値Vth2(例えば19V)、24V電源用の保護設定値Vth3U(例えば28.5V)、及び、24V電源用の保護解除値Vth2L(例えば27.5V)を設定しておけばよい。
【0087】
例えば、電源電圧VCCとして12Vが印加されるべきアプリケーションでは、電源電圧VCCが保護設定値Vth1Uを上回った時点で過電圧保護動作が発動される。また、電源電圧VCCとして24Vが印加されるべきアプリケーションでは、電源電圧VCCが保護設定値Vth3Uを上回った時点で過電圧保護動作が発動される。
【0088】
なお、電源電圧VCCとして12Vが印加されるべきアプリケーションでは、電源電圧VCCが12V電源用の上側保護解除値Vth2を上回るおそれはないものとし、また、電源電圧VCCとして24Vが印加されるべきアプリケーションでは、電源電圧VCCが12V電源用の上側保護解除値Vth2を下回るおそれはないものとする。
【0089】
<その他の変形例>
上記の実施形態では、3相ブラシレスモータの駆動制御を行うモータ駆動装置に本発明を適用した構成を例に挙げて説明を行ったが、本発明の適用対象はこれに限定されるものではなく、他方式のモータ駆動装置にも広く適用することが可能である。
【0090】
また、本明細書中に開示されている種々の技術的特徴は、上記実施形態のほか、その技術的創作の主旨を逸脱しない範囲で種々の変更を加えることが可能である。例えば、各種信号の論理レベル反転は任意である。すなわち、上記実施形態は、全ての点で例示であって、制限的なものではないと考えられるべきであり、本発明の技術的範囲は、上記実施形態の説明ではなく、特許請求の範囲によって示されるものであり、特許請求の範囲と均等の意味及び範囲内に属する全ての変更が含まれると理解されるべきである。
【産業上の利用可能性】
【0091】
本発明に係るモータ駆動装置は、モータを急減速させたり、モータの正転/逆転を切り換えたりする可能性のある電気機器全般(OA機器、家電製品、産業機器、その他一般民生機器など)に利用することが可能である。
【符号の説明】
【0092】
1 電気機器
10 モータ駆動装置
11 ホールアンプ回路
11U、11V、11W ホールアンプ
12 ロジック回路
121 ORゲート
122 PWM信号生成部
123 RSフリップフロップ
124 カウンタ
125、126 ANDゲート
13 プリドライバ回路
14 内部電源回路
15 チャージポンプ回路
16 過熱保護回路
17 不足電圧保護回路
18 過電圧保護回路
181 コンパレータ
182、183 抵抗
184 直流電圧源
20 出力段
21U、21V、21W 上側トランジスタ
22U、22V、22W 下側トランジスタ
30 モータ
40 ホールセンサ
40U、40V、40W ホール素子
【技術分野】
【0001】
本発明は、モータ駆動装置及びこれを用いた電気機器に関するものである。
【背景技術】
【0002】
モータの急制動時(急減速時やモータ駆動中の正転/逆転切替時など)に生じる電源電圧の上昇は、モータ駆動装置の出力段から電源端に逆流する回生電流が原因である。第1の従来技術では、モータ駆動装置の出力段に流れる回生電流やモータへの出力電圧を監視することで、電源電圧の上昇を間接的に監視することにより、回生電流の逆流を防止して電源電圧の上昇を抑制する構成が採用されていた。また、第2の従来技術では、一般的な同期整流PWM[pulse width modulation]駆動方式を用いずにモータの駆動制御を行うモータ駆動装置も提案されていた。
【0003】
上記に関連する従来技術の一例としては、特許文献1〜5を挙げることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3912190号明細書
【特許文献2】特開2002−272162号公報
【特許文献3】特開2003−47255号公報
【特許文献4】特開2003−134878号公報
【特許文献5】特開2007−110778号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記第1の従来技術では、モータ駆動装置の出力段に流れる回生電流やモータへの出力電圧を監視するために、専用の監視回路が必要となるため、モータ駆動装置の回路規模増大やコストアップを招くという問題があった。また、上記第1の従来技術では、電源電圧の上昇を直接的に監視しているわけではないので、検出精度の面でも向上の余地が残されていた。
【0006】
また、モータ駆動装置の出力段を形成する上側FETと下側FETの駆動信号には、貫通電流を防止する目的で、同時オン防止区間(同時オフ区間)を設けることが一般的である。そのため、同期整流PWM駆動方式を用いない上記第2の従来技術であっても、上側FETと下側FETが同時にオフするタイミングはあり得るので、電源ラインに回生電流が逆流して電源電圧が上昇する危険性を完全に払拭することはできなかった。
【0007】
本発明は、本願の発明者らにより見出された上記の問題点に鑑み、モータの急制動時における電源電圧の上昇を抑制することが可能なモータ駆動装置、及び、これを用いた電気機器を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明に係るモータ駆動装置は、電源端とモータとの間に接続された上側トランジスタ及び前記モータと接地端との間に接続された下側トランジスタ各々のオン/オフ制御を行うロジック回路と、前記電源端に印加される電源電圧と所定の保護設定値との比較結果に応じた過電圧保護信号を生成して前記ロジック回路に送出する過電圧保護回路と、を有し、前記ロジック回路は、前記電源電圧が前記保護設定値を上回ったときに前記上側トランジスタをオフして前記下側トランジスタをオンする構成(第1の構成)とされている。
【0009】
なお、上記第1の構成から成るモータ駆動装置において、前記ロジック回路は、ブレーキ信号が入力されたときにも前記上側トランジスタをオフとして前記下側トランジスタをオンとする構成(第2の構成)にするとよい。
【0010】
また、上記第1または第2の構成から成るモータ駆動装置において、前記ロジック回路は、前記電源電圧が所定の保護解除値を下回ったときに前記上側トランジスタ及び前記下側トランジスタ各々のオン/オフ制御を通常時の状態に復帰させる構成(第3の構成)にするとよい。
【0011】
また、上記第1または第2の構成から成るモータ駆動装置において、前記ロジック回路は、前記電源電圧が前記保護設定値を上回ってから所定時間が経過したときに前記上側トランジスタ及び前記下側トランジスタ各々のオン/オフ制御を通常時の状態に復帰させる構成(第4の構成)にするとよい。
【0012】
また、上記第1〜第4いずれかの構成から成るモータ駆動装置において、前記ロジック回路は、モード切替信号に応じて、前記上側トランジスタをオフとして前記下側トランジスタをオンとする第1過電圧保護モードと、前記上側トランジスタと前記下側トランジスタをいずれもオフとする第2過電圧保護モードと、を切り替える構成(第5の構成)にするとよい。
【0013】
また、上記第5の構成から成るモータ駆動装置において、前記ロジック回路は、前記モータの急制動時に第1過電圧保護モードとなり、その余の場合に第2過電圧保護モードとなる構成(第6の構成)にするとよい。
【0014】
また、上記第6の構成から成るモータ駆動装置において、前記ロジック回路は、前記モータの回転方向を切り替えるためのモータ回転方向切替信号、前記モータの回転速度を可変制御するためのモータ回転速度制御信号、または、前記モータの回転速度に応じた発振周波数を持つFG信号に基づいて、前記モード切替信号を生成する構成(第7の構成)にするとよい。
【0015】
また、上記第1〜第7いずれかの構成から成るモータ駆動装置において、前記過電圧保護回路には、複数の電源電圧に対応して複数の保護設定値が設定されている構成(第8の構成)にするとよい。
【0016】
また、本発明に係る電気機器は、モータと、前記モータに接続された出力段と、前記出力段を形成する上側トランジスタと下側トランジスタのオン/オフ制御を行う上記第1〜第8いずれかの構成から成るモータ駆動装置を有する構成(第9の構成)とされている。
【発明の効果】
【0017】
本発明によれば、モータの急制動時における電源電圧の上昇を抑制することが可能なモータ駆動装置、及び、これを用いた電気器を提供することができる。
【図面の簡単な説明】
【0018】
【図1】モータ駆動装置を用いた電気機器の一構成例を示すブロック図
【図2】モータ駆動装置の通電ロジックを示す真理値表
【図3】モータ駆動装置の動作を示すタイムチャート
【図4】ロジック回路の第1構成例を示すブロック図
【図5】第1構成例における過電圧保護動作を示すタイムチャート
【図6】ロジック回路の第2構成例を示すブロック図
【図7】第2構成例における過電圧保護動作を示すタイムチャート
【図8】ロジック回路の第3構成例を示すブロック図
【図9】第3構成例における過電圧保護動作を示すタイムチャート
【図10】ロジック回路の第4構成例を示すブロック図
【図11】第4構成例における過電圧保護動作を示すタイムチャート
【図12】複数電源への対応例を示す説明図
【発明を実施するための形態】
【0019】
<全体構成>
図1は、モータ駆動装置を用いた電気機器の一構成例を示すブロック図である。本構成例の電気機器1は、モータ駆動装置10と、出力段20と、モータ30と、ホールセンサ40を有する。電気機器1としては、モータ30を急減速させたり、モータ30の正転/逆転を切り換えたりする可能性のある電気機器全般(OA機器、家電製品、産業機器、その他一般民生機器など)が想定される。
【0020】
モータ駆動装置10は、ホールセンサ40から入力される3相(U相/V相/W相)の正/負ホールセンサ信号(HU+/HU−、HV+/HV−、HW+/HW−)に応じて各相の上側/下側ドライバ駆動信号(UH/UL、VH/VL、WH/WL)を生成し、これらを出力段20に出力する半導体集積回路装置である。
【0021】
出力段20は、電源端(電源電圧VCCの印加端)とモータ30との間に接続された上側トランジスタ21U、21V、21Wと、モータ30と接地端(接地電圧GNDの印加端)との間に接続された下側トランジスタ22U、22V、22Wを含む。上側トランジスタ21U、21V、21W及び下側トランジスタ22U、22V、22Wとしては、いずれもNチャネル型のパワーMOS[metal oxide semiconductor]電界効果トランジスタが用いられている。U相の上側トランジスタ21Uと下側トランジスタ22U、V相の上側トランジスタ21Vと下側トランジスタ22V、及び、W相の上側トランジスタ21Wと下側トランジスタ22Wは、各々、電源端と接地端との間に直列接続されており、各トランジスタ間の接続ノードから各相のモータ駆動電圧(U、V、W)が出力される。
【0022】
モータ30は、出力段20からのモータ駆動電圧(U、V、W)によって回転駆動される3相ブラシレスモータである。
【0023】
ホールセンサ40は、ホール効果を利用してモータ30のロータ位置を検出するセンサであり、3相のホール素子40U、40V、40Wを含む。
【0024】
<モータ駆動装置>
本構成例のモータ駆動装置10には、ホールアンプ回路11と、ロジック回路12と、プリドライバ回路13と、内部電源回路14と、チャージポンプ回路15と、過熱保護回路16と、不足電圧保護回路17と、過電圧保護回路18と、が集積化されている。
【0025】
ホールアンプ回路11は、3相のホールアンプ11U、11V、11Wを含み、ホールセンサ40から入力される各相の正/負ホールセンサ信号(HU+/HU−、HV+/HV−、HW+/HW−)を各相毎に差動増幅することで各相のホールセンサ信号(HU、HV、HW)を生成し、これらをロジック回路12に出力する。ホールアンプ11U、11V、11Wには、ノイズによる誤動作を防止するためのヒステリシス(例えば±15mV)が設けられているので、このヒステリシスを考慮してホール素子40U、40V、40Wへのバイアス電流を設定することが望ましい。なお、ホールアンプ11U、11V、11Wの差動入力端子間には、100pF〜0.01μF程度のセラミックコンデンサを接続することが望ましい。また、ホールアンプ11U、11V、11Wには、同相入力電圧範囲が設けられているので、この同相入力電圧範囲を考慮してホール素子40U、40V、40Wへのバイアス電流を設定することが望ましい。
【0026】
ロジック回路12は、各相のホールセンサ信号(HU、HV、HW)に基づいて、各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を生成し、これらをプリドライバ回路13に出力することにより、出力段20を形成する上側トランジスタ21U、21V、21Wと下側トランジスタ22U、22V、22Wのオン/オフ制御を行う。なお、ロジック回路12は、外部入力されるモータ回転方向切替信号CWに応じてモータ30の回転方向(CW[clock wise]/CCW[counter clock wise])を切り替える機能も備えている。また、ロジック回路12は、外部入力されるブレーキ信号BRKに応じてモータ30を急速に停止させる機能も備えている。また、ロジック回路12は、外部入力されるモータ回転速度制御信号PWMに応じてモータ30の回転速度(トルク)を可変制御する機能も備えている。また、ロジック回路12は、モータ30の回転速度に応じた発振周波数を持つFG信号(例えばU相のホールセンサ信号HUの波形整形信号や、各相のホールセンサ信号(HU、HV、HW)の3相合成信号)を生成する機能も備えている。また、ロジック回路12は、過熱保護回路16、不足電圧保護回路17、及び、過電圧保護回路18の各種保護信号に応じて各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする機能も備えている。また、ロジック回路12は、ホールアンプ回路11の出力が全て同一の論理レベルとなったときに、ホール入力異常と判断して各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする機能も備えている。また、ロジック回路12は、昇圧電圧VGが所定の閾値電圧を下回ったときに、昇圧異常と判断して各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする機能も備えている。
【0027】
プリドライバ回路13は、ロジック回路12から入力される各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)に所定の信号処理(レベルシフト処理、波形整形処理、同時オン禁止処理など)を施すことにより、各相の上側/下側ドライバ駆動信号(UH/UL、VH/VL、WH/WL)を生成して、これを外付けの出力段20に出力する。なお、上側ドライバ駆動信号(UH、VH、WH)の電位は、モータ駆動電圧(U、V、W)の電位を基準として決定される。
【0028】
内部電源回路14は、電源電圧VCCから内部電源電圧VREGを生成し、これをモータ駆動装置10各部(ロジック回路12など)に供給する。
【0029】
チャージポンプ回路15は、電源電圧VCCから昇圧電圧VCPを生成し、これをプリドライバ回路13に供給する。チャージポンプ回路15を備えた構成であれば、出力段20を形成する上側トランジスタ21U、21V、21Wとして、Nチャネル型MOS電界効果トランジスタを用いることが可能となる。
【0030】
過熱保護回路16(いわゆるTSD[thermal shutdown]回路)は、モータ駆動装置10のチップ温度を監視して過熱保護信号を生成し、これをロジック回路12に出力する。モータ駆動装置10のチップ温度が保護設定値(例えば175℃)以上まで上昇すると、過熱保護信号が異常時の論理レベル(例えばハイレベル)となり、これを受けたロジック回路12は各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする。一方、モータ駆動装置10のチップ温度が保護解除値(例えば150℃)以下まで低下すると、過熱保護信号が正常時の論理レベル(例えばローレベル)となり、これを受けたロジック回路12は通常動作に移行する。
【0031】
不足電圧保護回路17(いわゆるUVLO[under voltage lock out]回路)は、電源電圧VCCを監視して不足電圧保護信号を生成し、これをロジック回路12に出力する。電源電圧VCCが保護設定値(例えば6V)以下まで低下すると、不足電圧保護信号が異常時の論理レベル(例えばハイレベル)となり、これを受けたロジック回路12は各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を強制的にミュートする。一方、電源電圧VCCが保護解除値(例えば7V)以上まで上昇すると、不足電圧保護信号が正常時の論理レベル(例えばローレベル)となり、これを受けたロジック回路12は通常動作に移行する。
【0032】
過電圧保護回路18(いわゆるOVLO[over voltage lock out]回路)は、電源電圧VCCを監視して過電圧保護信号を生成し、これをロジック回路12に出力する。過電圧保護信号に応じたロジック回路12の保護動作については、後ほど詳細に説明する。
【0033】
なお、図1では明示されていないが、モータ駆動装置10には、その他の保護回路として、過電流保護回路やモータ拘束保護回路などを組み込むことも可能である。
【0034】
上記構成から成るモータ駆動装置10では、120°通電方式によってモータ30の駆動制御が行われる。図2は、モータ駆動装置10の通電ロジックを示す真理値表であり、図3は、モータ駆動装置10の動作を示すタイムチャートである。なお、図2において、「PWM」は、モータ回転速度制御信号PWMがハイレベルであるときにハイレベルとなり、モータ回転速度制御信号PWMがローレベルであるときにローレベルとなる。
【0035】
<過電圧保護機能>
[第1構成例]
図4は、ロジック回路12の第1構成例を示すブロック図である。第1構成例のロジック回路12は、ORゲート121と、PWM信号生成部122と、を含む。
【0036】
ORゲート121は、モータ駆動装置10の外部から入力されるブレーキ信号BRKと、過電圧保護回路18から入力される過電圧保護信号OVPとの論理和演算を行うことにより、内部ショートブレーキ信号SBを生成し、これをPWM信号生成部122に送出する。すなわち、内部ショートブレーキ信号SBは、ブレーキ信号BRKがハイレベルである場合、及び、過電圧保護信号OVPがハイレベルである場合にハイレベルとなり、ブレーキ信号BRKがローレベルであって過電圧保護信号OVPがローレベルである場合にローレベルとなる。
【0037】
PWM信号生成部122は、内部ショートブレーキ信号SBがローレベルである場合には、各相のホールセンサ信号(HU、HV、HW)に応じて各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を生成し、内部ショートブレーキ信号SBがハイレベルである場合には、各相のホールセンサ信号(HU、HV、HW)に依らず、各相の上側プリドライバ駆動信号(uh、vh、wh)を全てローレベルとし、各相の下側プリドライバ駆動信号(ul、vl、wl)を全てハイレベルとする。
【0038】
過電圧保護回路18は、コンパレータ181と、抵抗182及び183と、直流電圧源184と、を含む。抵抗182及び183は、電源端(電源電圧VCCの印加端)と接地端(接地電圧GNDの印加端)との間に直列接続されている。コンパレータ181の非反転入力端(+)は、抵抗182と抵抗183との接続ノードに接続されている。コンパレータ181の反転入力端(−)は、直流電圧源184の正極端に接続されている。直流電圧源184の負極端は、接地端に接続されている。コンパレータ181の出力端は、過電圧保護信号OVPの出力端に接続されている。
【0039】
コンパレータ181は、電源電圧VCC(より正確にはその分圧電圧)と所定の閾値電圧とを比較して過電圧保護信号OVPを生成する。コンパレータ181には、ヒステリシス特性が付与されている。すなわち、過電圧保護信号OVPは、電源電圧VCCが保護設定値VthU以上まで上昇したときにハイレベルとなり、電源電圧VCCが保護解除値VthL以下まで低下したときにローレベルとなる(ただしVthU>VthL)。
【0040】
図5は、第1構成例における過電圧保護動作を示すタイムチャートであり、上から順番に、電源電圧VCC、過電圧保護信号OVP、内部ショートブレーキ信号SB、及び、回生電流IR(モータ30の急制動時に出力段20から電源端に逆流する回生電流)が描写されている。以下では、ブレーキ信号BRKがローレベルであることを前提として過電圧保護動作の説明を行う。
【0041】
時刻t11において、モータ30の急制動(急減速やモータ駆動中の正転/逆転切替など)が生じると、モータ30のコイルに蓄積されているエネルギの放出により、出力段20から電源端に向けて回生電流IRが逆流し、電源電圧VCCが上昇する。
【0042】
時刻t12において、電源電圧VCCが保護設定値VthUを上回ると、過電圧保護信号OVPがローレベルからハイレベルに立ち上がり、さらに内部ショートブレーキ信号SBがローレベルからハイレベルに立ち上がる。このとき、PWM信号生成部122は、各相の上側プリドライバ駆動信号(uh、vh、wh)を全てローレベルとし、各相の下側プリドライバ駆動信号(ul、vl、wl)を全てハイレベルとする。そして、これを受けたプリドライバ回路13は、各相の上側ドライバ駆動信号(UH、VH、WH)を全てローレベルとし、各相の下側プリドライバ駆動信号(UL、VL、WL)を全てハイレベルとする。その結果、出力段20を形成する上側トランジスタ21U、21V、21Wは全てオフとなり、下側トランジスタ22U、22V、22Wは全てオンとなる。従って、モータ30から接地端に電流を逃がすための低インピーダンスな放電経路が形成されるので、電源端に向けて逆流する回生電流IRを速やかに減少させることが可能となり、延いては、電源電圧VCCを引き下げることが可能となる。
【0043】
時刻t13において、電源電圧VCCが保護解除値VthLを下回ると、過電圧保護信号OVPがハイレベルからローレベルに立ち下がり、さらに内部ショートブレーキ信号SBがハイレベルからローレベルに立ち下がる。このとき、PWM信号生成部122は、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)を再開する。このような構成とすることにより、モータ30の急制動時において、電源電圧VCCの上昇を適切に抑制しつつ、モータ30が完全に停止してしまう事態を回避することができる。なお、時刻t13において、モータ30のコイルにエネルギが残存している場合には、出力段20から電源端に向けて回生電流IRが再び逆流し、電源電圧VCCが上昇する。
【0044】
時刻t14において、電源電圧VCCが再び保護設定値VthUを上回ると、先述の時刻t12と同じく、上側トランジスタ21U、21V、21Wが全てオフとなり、下側トランジスタ22U、22V、22Wが全てオンとなるので、電源端に向けて逆流する回生電流IRが減少して電源電圧VCCが下降に転じる。
【0045】
時刻t15において、電源電圧VCCが再び保護解除値VthLを下回ると、先述の時刻t13と同じく、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作が再開される。このとき、モータ30のコイルにエネルギが残存していなければ、出力段20から電源端に向けて回生電流IRの逆流は生じないので、以後、ホールセンサ信号(HU、HV、HW)に応じた通常のモータ駆動制御が継続される。
【0046】
上記動作を総括すると、第1構成例のロジック回路12は、電源電圧VCCが所定の保護設定値VthUを上回ったときに、上側トランジスタ21U、21V、21Wをオフして下側トランジスタ22U、22V、22Wをオンする構成であると言える。このように電源電圧VCCの上昇が検知されたときに、モータ30のコイルに蓄積されたエネルギが消費されるまで、下側トランジスタ22U、22V、22Wを全てオンさせる構成であれば、出力段20に流れる回生電流IRを接地端に向けて逃がすことができるので、モータ30の急制動時における電源電圧VCCの上昇を極めて効果的に抑制することが可能となり、延いては、モータ駆動装置10や出力段20の破壊を防止することが可能となる。
【0047】
また、上記の過電圧保護動作を実現する際には、モータ駆動装置10の保護機能として一般的に利用されている過電圧保護回路18を流用することができる。従って、回生電流IRやモータ駆動電圧(U、V、W)を監視する従来構成と異なり、専用の監視回路を別途設ける必要がないので、回路構成を非常に簡素化することが可能となる。また、上記の過電圧保護動作では、電源電圧VCCを直接的に監視することができるので、誤検出や誤動作の可能性も極めて低いと言える。
【0048】
なお、図5では、ブレーキ信号BRKがローレベルであることを前提として過電流保護動作の説明を行ったが、ロジック回路12は、ブレーキ信号BRKがハイレベルとされたときにも、上側トランジスタ21U、21V、21Wを全てオフとして下側トランジスタ22U、22V、22Wを全てオンとする。このようなオン/オフ制御により、外部からの指示によってモータ30を急速に停止させることが可能となる。
【0049】
[第2構成例]
図6は、ロジック回路12の第2構成例を示すブロック図である。第2構成例のロジック回路12は、先出の第1構成例とほぼ同様の構成であり、RSフリップフロップ123とカウンタ124が追加されている点に特徴を有する。そこで、第1構成例と同様の構成要素については、図4と同一の符号を付すことで重複した説明を省略し、以下では第2構成例の特徴部分について重点的な説明を行う。
【0050】
RSフリップフロップ123のセット端(S)は、過電圧保護回路18の出力端に接続されている。RSフリップフロップ123のリセット端(R)は、カウンタ124の出力端に接続されている。RSフリップフロップ123の出力端(Q)は、ORゲート121の入力端とカウンタ124の入力端に各々接続されている。
【0051】
RSフリップフロップ123は、セット信号S(過電圧保護信号OVP)の立上がりエッジをトリガとして出力信号Qをハイレベルにセットし、リセット信号R(カウンタ124の出力信号)をトリガとして出力信号Qをローレベルにリセットする。
【0052】
カウンタ124は、出力信号Qの立上がりエッジをトリガとして所定時間T(例えば4ms)のカウント動作を開始し、所定時間Tが経過した時点でリセット信号Rにパルスを立ち上げる。
【0053】
ORゲート121は、モータ駆動装置10の外部から入力されるブレーキ信号BRKとRSフリップフロップ123から入力される出力信号Qとの論理和演算を行うことにより内部ショートブレーキ信号SBを生成し、これをPWM信号生成部122に送出する。
【0054】
図7は、第2構成例における過電圧保護動作を示すタイムチャートであり、上から順番に、電源電圧VCC、セット信号S(過電圧保護信号OVP)、出力信号Q、リセット信号R、内部ショートブレーキ信号SB、及び、回生電流IR(モータ30の急制動時に出力段20から電源端に逆流する回生電流)が描写されている。以下では、ブレーキ信号BRKがローレベルであることを前提として過電圧保護動作の説明を行う。
【0055】
時刻t21において、モータ30の急制動(急減速やモータ駆動中の正転/逆転切替など)が生じると、モータ30のコイルに蓄積されているエネルギの放出により、出力段20から電源端に向けて回生電流IRが逆流し、電源電圧VCCが上昇する。
【0056】
時刻t22において、電源電圧VCCが保護設定値VthUを上回ると、セット信号S(過電圧保護信号OVP)がローレベルからハイレベルに立ち上がる。その結果、出力信号Qがハイレベルにセットされて内部ショートブレーキ信号SBがローレベルからハイレベルに立ち上がる。このとき、上側トランジスタ21U、21V、21Wが全てオフとなり、下側トランジスタ22U、22V、22Wが全てオンとなるので、電源端に向けて逆流する回生電流IRが減少して電源電圧VCCが下降に転じる。また、時刻t22では、出力信号Qの立上がりエッジをトリガとして、カウンタ124による所定時間Tのカウント動作が開始される。
【0057】
時刻t23において、電源電圧VCCが保護解除値VthLを下回ると、セット信号S(過電圧保護信号OVP)がハイレベルからローレベルに立ち下がる。ただし、この時点では、カウンタ124による所定時間Tのカウント動作が完了していないので、リセット信号Rはローレベルに維持されている。
【0058】
時刻t24において、カウンタ124による所定時間Tのカウント動作が完了すると、リセット信号Rにパルスが立ち上げられて、出力信号Qがローレベルにリセットされる。その結果、内部ショートブレーキ信号SBがハイレベルからローレベルに立ち下がる。このとき、PWM信号生成部122は、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)を再開する。このような構成とすることにより、先述の第1構成例と同様、モータ30の急制動時において、電源電圧VCCの上昇を適切に抑制しつつ、モータ30が完全に停止してしまう事態を回避することができる。なお、時刻t24において、モータ30のコイルにエネルギが残存している場合には、出力段20から電源端に向けて回生電流IRが再び逆流し、電源電圧VCCが上昇する。
【0059】
時刻t25において、電源電圧VCCが再び保護設定値VthUを上回ると、先述の時刻t22と同じく、上側トランジスタ21U、21V、21Wが全てオフとなり、下側トランジスタ22U、22V、22Wが全てオンとなるので、電源端に向けて逆流する回生電流IRが減少して電源電圧VCCが下降に転じる。
【0060】
時刻t26において、電源電圧VCCが保護解除値VthLを下回ると、セット信号S(過電圧保護信号OVP)がハイレベルからローレベルに立ち下がる。ただし、この時点では、カウンタ124による所定時間Tのカウント動作が完了していないので、リセット信号Rはローレベルに維持されている。
【0061】
時刻t27において、カウンタ124による所定時間Tのカウント動作が完了すると、先述の時刻t24と同じく、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)が再開される。このとき、モータ30のコイルにエネルギが残存していなければ、出力段20から電源端に向けて回生電流IRの逆流は生じないので、以後、ホールセンサ信号(HU、HV、HW)に応じた通常のモータ駆動制御が継続される。
【0062】
上記したように、第2構成例のロジック回路12は、電源電圧VCCが保護設定値VthUを上回ってから所定時間Tが経過したときに、上側トランジスタ21U、21V、21W及び下側トランジスタ22U、22V、22Wのオン/オフ制御を通常時の状態に自動復帰させる構成とされている。このような構成とすることにより、先述の第1構成例と同様、モータ30の急制動時において、電源電圧VCCの上昇を適切に抑制しつつ、モータ30が完全に停止してしまう事態を回避することができる。また、第2構成例のロジック回路12であれば、モータ30の特性に応じて所定時間Tを適宜調整することにより、電源電圧VCCの上昇抑制とモータ30の停止回避との最適化を図ることが可能となる。なお、第2構成例のロジック回路12を採用する場合、過電圧保護回路18に含まれるコンパレータ181には、ヒステリシス特性を付与しなくても構わない。
【0063】
[第3構成例]
図8は、ロジック回路12の第3構成例を示すブロック図である。第3構成例のロジック回路12は、先出の第1構成例とほぼ同様の構成(第1構成例を基礎としてモード切替機能を付加した構成)であり、ANDゲート125及び126が追加されている点に特徴を有する。そこで、第1構成例と同様の構成要素については図4と同一の符号を付すことで重複した説明を省略し、以下では第3構成例の特徴部分について重点的な説明を行う。
【0064】
ANDゲート125は、過電圧保護回路18から入力される過電圧保護信号OVPと、モード切替信号生成部(不図示)から入力されるモード切替信号MODEとの論理積演算を行うことで出力信号Xを生成し、これをORゲート121に送出する。従って、モード切替信号MODEがハイレベルの場合には、過電圧保護信号OVPが出力信号Xとしてスルー出力され、モード切替信号MODEがローレベルの場合には、過電圧保護信号OVPの論理レベルに依ることなく、出力信号Xがローレベルに固定される。
【0065】
ANDゲート126は、過電圧保護回路18から入力される過電圧保護信号OVPと、モード切替信号生成部(不図示)から反転入力されるモード切替信号MODEとの論理積演算を行うことでシャットダウン信号SDNを生成し、これをPWM信号生成部122に送出する。従って、モード切替信号MODEがローレベルの場合には、過電圧保護信号OVPがシャットダウン信号SDNとしてスルー出力され、モード切替信号MODEがハイレベルの場合には、過電圧保護信号OVPの論理レベルに依ることなく、シャットダウン信号SDNがローレベルに固定される。
【0066】
ORゲート121は、モータ駆動装置10の外部から入力されるブレーキ信号BRKと、ANDゲート125から入力される出力信号Xとの論理和演算を行うことにより、内部ショートブレーキ信号SBを生成し、これをPWM信号生成部122に送出する。
【0067】
図9は、第3構成例における過電圧保護動作を示すタイムチャートであり、上から順番に、モード切替信号MODE、電源電圧VCC、過電圧保護信号OVP、シャットダウン信号SDN、内部ショートブレーキ信号SB(出力信号X)、及び、回生電流IR(モータ30の急制動時に出力段20から電源端に逆流する回生電流)が描写されている。以下ではブレーキ信号BRKがローレベルであることを前提として過電圧保護動作の説明を行う。
【0068】
時刻t31では、モータ30の急制動とは異なる原因により、電源電圧VCCに異常な上昇が生じている。このとき、モード切替信号MODEはローレベルとされているので、ANDゲート125は、過電圧保護信号OVPの論理レベルに依ることなく出力信号Xをローレベルに固定する状態となり、ANDゲート126は、過電圧保護信号OVPをシャットダウン信号SDNとしてスルー出力する状態となる。
【0069】
従って、時刻t31において、電源電圧VCCが保護設定値VthUを上回ると、過電圧保護信号OVPがローレベルからハイレベルに立ち上がり、さらにはシャットダウン信号SDNがローレベルからハイレベルに立ち上がる。このとき、PWM信号生成部122は、各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を全てローレベルとする。そして、これを受けたプリドライバ回路13は、各相の上側/下側ドライバ駆動信号(UH/UL、VH/VL、WH/WL)を全てローレベルとする。その結果、出力段20を形成する上側トランジスタ21U、21V、21W及び下側トランジスタ22U、22V、22Wは全てオフとなる。このようなシャットダウン動作を行うことにより、モータ駆動電圧(U、V、W)をいずれもハイインピーダンス状態とすることができるので、モータ30を安全に停止させることが可能となる。
【0070】
時刻t32において、電源電圧VCCが保護解除値VthLを下回ると、過電圧保護信号OVPがハイレベルからローレベルに立ち下がり、さらにはシャットダウン信号SDNがハイレベルからローレベルに立ち下がる。このとき、PWM信号生成部122は、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)を再開する。このような構成とすることにより、外部からの復帰信号を待つことなく、モータ30の駆動制御を自発的に再開することが可能となる。
【0071】
一方、時刻t11において、モータ30の急制動(急減速やモータ駆動中の正転/逆転切替など)が生じると、モード切替信号MODEがローレベルからハイレベルに立ち上げられる。その結果、時刻t11以降、ANDゲート125は、過電圧保護信号OVPを出力信号Xとしてスルー出力する状態となり、ANDゲート126は、過電圧保護信号OVPの論理レベルに依ることなくシャットダウン信号SDNをローレベルに固定する状態となる。従って、時刻t11〜t15では、先出の図5と同様の過電圧保護動作が実施されるので、出力段20に流れる回生電流IRを接地端に逃がして電源電圧VCCの上昇を抑制し、モータ駆動装置10や出力段20の破壊を防止することが可能となる。
【0072】
上記のように、第3構成例のロジック回路12は、電源電圧VCCが過電圧状態となったときの保護動作として、上側トランジスタ21U、21V、21Wをオフとして下側トランジスタ22U、22V、22Wをオンとする第1過電圧保護モード(MODE=H)と、上側トランジスタ21U、21V、21Wと下側トランジスタ22U、22V、22Wをいずれもオフとする第2過電圧保護モード(MODE=L)と、を切り替える構成とされている。より具体的に述べると、第3構成例のロジック回路12は、モータ30の急制動時に第1過電圧保護モード(MODE=H)となり、その余の場合に第2過電圧保護モード(MODE=L)となる。このような構成とすることにより、電源電圧VCCが過電圧状態に至った原因に応じて最適な保護動作を実施することができるので、モータ駆動装置10の信頼性を高めることが可能となる。
【0073】
なお、モード切替信号MODEについては、モータ駆動装置10の外部に設けられたメインコントローラ(マイコンなど)から外部入力を受ける構成としてもよいし、ロジック回路12の内部で独自に生成する構成としてもよい。後者の構成を採用する場合、ロジック回路12は、モータ回転方向切替信号CW、モータ回転速度制御信号PWMB、またはFG信号に基づいてモータ30の急制動の有無を監視し、その監視結果に応じたモード切替信号MODEを生成する構成にするとよい。また、モード切替信号MODEをハイレベルに立ち上げた後、これをローレベルに復帰させるタイミングについては、例えば、モード切替信号MODEの立上がりエッジから所定時間のカウント完了時点とすればよい。
【0074】
[第4構成例]
図10は、ロジック回路12の第4構成例を示すブロック図である。第4構成例のロジック回路12は、先出の第2構成例とほぼ同様の構成(第2構成例を基礎としてモード切替機能を付加した構成)であり、ANDゲート125及び126が追加されている点に特徴を有する。そこで、第2構成例と同様の構成要素については図6と同一符号を付すことで重複した説明を省略し、以下では第4構成例の特徴部分について重点的な説明を行う。
【0075】
ANDゲート125は、RSフリップフロップ回路123から入力される出力信号Qと、モード切替信号生成部(不図示)から入力されるモード切替信号MODEとの論理積演算を行うことで出力信号Xを生成し、これをORゲート121に送出する。従って、モード切替信号MODEがハイレベルの場合には、出力信号Qが出力信号Xとしてスルー出力され、モード切替信号MODEがローレベルの場合には、出力信号Qの論理レベルに依ることなく、出力信号Xがローレベルに固定される。
【0076】
ANDゲート126は、過電圧保護回路18から入力される過電圧保護信号OVPと、モード切替信号生成部(不図示)から反転入力されるモード切替信号MODEとの論理積演算を行うことでシャットダウン信号SDNを生成し、これをPWM信号生成部122に送出する。従って、モード切替信号MODEがローレベルの場合には、過電圧保護信号OVPがシャットダウン信号SDNとしてスルー出力され、モード切替信号MODEがハイレベルの場合には、過電圧保護信号OVPの論理レベルに依ることなく、シャットダウン信号SDNがローレベルに固定される。
【0077】
ORゲート121は、モータ駆動装置10の外部から入力されるブレーキ信号BRKと、ANDゲート125から入力される出力信号Xとの論理和演算を行うことにより、内部ショートブレーキ信号SBを生成し、これをPWM信号生成部122に送出する。
【0078】
なお、RSフリップフロップ123及びカウンタ124は、モード切替信号MODEがローレベルであるときに、各々の動作を停止する構成にするとよい。このような構成とすることにより、ロジック回路12の消費電力を低減することが可能となる。
【0079】
図11は、第4構成例における過電圧保護動作を示すタイムチャートであって、上から順番に、モード切替信号MODE、電源電圧VCC、セット信号S(過電圧保護信号OVP)、出力信号Q、リセット信号R、シャットダウン信号SDN、内部ショートブレーキ信号SB(出力信号X)、及び、回生電流IR(モータ30の急制動時に出力段20から電源端に逆流する回生電流)が描写されている。以下では、ブレーキ信号BRKがローレベルであることを前提として過電圧保護動作の説明を行う。
【0080】
時刻t31では、モータ30の急制動とは異なる原因により、電源電圧VCCに異常な上昇が生じている。このとき、モード切替信号MODEはローレベルとされているので、ANDゲート125は、出力信号Qの論理レベルに依ることなく出力信号Xをローレベルに固定する状態となり、ANDゲート126は、過電圧保護信号OVPをシャットダウン信号SDNとしてスルー出力する状態となる。
【0081】
従って、時刻t31において、電源電圧VCCが保護設定値VthUを上回ると、過電圧保護信号OVPがローレベルからハイレベルに立ち上がり、さらにはシャットダウン信号SDNがローレベルからハイレベルに立ち上がる。このとき、PWM信号生成部122は、各相の上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)を全てローレベルとする。そして、これを受けたプリドライバ回路13は、各相の上側/下側ドライバ駆動信号(UH/UL、VH/VL、WH/WL)を全てローレベルとする。その結果、出力段20を形成する上側トランジスタ21U、21V、21W及び下側トランジスタ22U、22V、22Wは全てオフとなる。このようなシャットダウン動作を行うことにより、モータ駆動電圧(U、V、W)をいずれもハイインピーダンス状態とすることができるので、モータ30を安全に停止させることが可能となる。
【0082】
時刻t32において、電源電圧VCCが保護解除値VthLを下回ると、過電圧保護信号OVPがハイレベルからローレベルに立ち下がり、さらにはシャットダウン信号SDNがハイレベルからローレベルに立ち下がる。このとき、PWM信号生成部122は、ホールセンサ信号(HU、HV、HW)に応じた上側/下側プリドライバ駆動信号(uh/ul、vh/vl、wh/wl)の生成動作(通常時のオン/オフ制御)を再開する。このような構成とすることにより、外部からの復帰信号を待つことなく、モータ30の駆動制御を自発的に再開することが可能となる。
【0083】
一方、時刻t21において、モータ30の急制動(急減速やモータ駆動中の正転/逆転切替など)が生じると、モード切替信号MODEがローレベルからハイレベルに立ち上げられる。その結果、時刻t21以降、ANDゲート125は、出力信号Qを出力信号Xとしてスルー出力する状態となり、ANDゲート126は、過電圧保護信号OVPの論理レベルに依ることなくシャットダウン信号SDNをローレベルに固定する状態となる。従って、時刻t21〜t27では、先出の図7と同様の過電圧保護動作が実施されるので、出力段20に流れる回生電流IRを接地端に逃がして電源電圧VCCの上昇を抑制し、モータ駆動装置10や出力段20の破壊を防止することが可能となる。
【0084】
第4構成例のロジック回路12であれば、先述した第1〜第3構成例の作用効果をいずれも享受することができるので、モータ駆動装置10の信頼性をより一層向上させることが可能となる。
【0085】
<複数電源への対応>
図12は、複数電源への対応例を示す説明図である。先の説明では、電源電圧VCCと比較参照される保護設定値及び保護解除値を一つずつ設定した構成を例に挙げたが、複数の電源電圧に対応する場合には、保護設定値及び保護解除値を複数設定してもよい。
【0086】
例えば、モータ駆動装置10が搭載されるアプリケーションに応じて、電源電圧VCCとして12Vまたは24Vのいずれかが印加される場合、12V電源用の保護設定値Vth1U(例えば16V)、12V電源用の下側保護解除値Vth1L(例えば15V)、12V電源用の上側保護解除値Vth2(例えば19V)、24V電源用の保護設定値Vth3U(例えば28.5V)、及び、24V電源用の保護解除値Vth2L(例えば27.5V)を設定しておけばよい。
【0087】
例えば、電源電圧VCCとして12Vが印加されるべきアプリケーションでは、電源電圧VCCが保護設定値Vth1Uを上回った時点で過電圧保護動作が発動される。また、電源電圧VCCとして24Vが印加されるべきアプリケーションでは、電源電圧VCCが保護設定値Vth3Uを上回った時点で過電圧保護動作が発動される。
【0088】
なお、電源電圧VCCとして12Vが印加されるべきアプリケーションでは、電源電圧VCCが12V電源用の上側保護解除値Vth2を上回るおそれはないものとし、また、電源電圧VCCとして24Vが印加されるべきアプリケーションでは、電源電圧VCCが12V電源用の上側保護解除値Vth2を下回るおそれはないものとする。
【0089】
<その他の変形例>
上記の実施形態では、3相ブラシレスモータの駆動制御を行うモータ駆動装置に本発明を適用した構成を例に挙げて説明を行ったが、本発明の適用対象はこれに限定されるものではなく、他方式のモータ駆動装置にも広く適用することが可能である。
【0090】
また、本明細書中に開示されている種々の技術的特徴は、上記実施形態のほか、その技術的創作の主旨を逸脱しない範囲で種々の変更を加えることが可能である。例えば、各種信号の論理レベル反転は任意である。すなわち、上記実施形態は、全ての点で例示であって、制限的なものではないと考えられるべきであり、本発明の技術的範囲は、上記実施形態の説明ではなく、特許請求の範囲によって示されるものであり、特許請求の範囲と均等の意味及び範囲内に属する全ての変更が含まれると理解されるべきである。
【産業上の利用可能性】
【0091】
本発明に係るモータ駆動装置は、モータを急減速させたり、モータの正転/逆転を切り換えたりする可能性のある電気機器全般(OA機器、家電製品、産業機器、その他一般民生機器など)に利用することが可能である。
【符号の説明】
【0092】
1 電気機器
10 モータ駆動装置
11 ホールアンプ回路
11U、11V、11W ホールアンプ
12 ロジック回路
121 ORゲート
122 PWM信号生成部
123 RSフリップフロップ
124 カウンタ
125、126 ANDゲート
13 プリドライバ回路
14 内部電源回路
15 チャージポンプ回路
16 過熱保護回路
17 不足電圧保護回路
18 過電圧保護回路
181 コンパレータ
182、183 抵抗
184 直流電圧源
20 出力段
21U、21V、21W 上側トランジスタ
22U、22V、22W 下側トランジスタ
30 モータ
40 ホールセンサ
40U、40V、40W ホール素子
【特許請求の範囲】
【請求項1】
電源端とモータとの間に接続された上側トランジスタ及び前記モータと接地端との間に接続された下側トランジスタ各々のオン/オフ制御を行うロジック回路と、
前記電源端に印加される電源電圧と所定の保護設定値との比較結果に応じた過電圧保護信号を生成して前記ロジック回路に送出する過電圧保護回路と、
を有し、
前記ロジック回路は、前記電源電圧が前記保護設定値を上回ったときに前記上側トランジスタをオフして前記下側トランジスタをオンすることを特徴とするモータ駆動装置。
【請求項2】
前記ロジック回路は、ブレーキ信号が入力されたときにも前記上側トランジスタをオフとして前記下側トランジスタをオンとすることを特徴とする請求項1に記載のモータ駆動装置。
【請求項3】
前記ロジック回路は、前記電源電圧が所定の保護解除値を下回ったときに前記上側トランジスタ及び前記下側トランジスタ各々のオン/オフ制御を通常時の状態に復帰させることを特徴とする請求項1または請求項2に記載のモータ駆動装置。
【請求項4】
前記ロジック回路は、前記電源電圧が前記保護設定値を上回ってから所定時間が経過したときに前記上側トランジスタ及び前記下側トランジスタ各々のオン/オフ制御を通常時の状態に復帰させることを特徴とする請求項1または請求項2に記載のモータ駆動装置。
【請求項5】
前記ロジック回路は、モード切替信号に応じて、前記上側トランジスタをオフとして前記下側トランジスタをオンとする第1過電圧保護モードと、前記上側トランジスタと前記下側トランジスタをいずれもオフとする第2過電圧保護モードと、を切り替えることを特徴とする請求項1〜請求項4のいずれか一項に記載のモータ駆動装置。
【請求項6】
前記ロジック回路は、前記モータの急制動時に第1過電圧保護モードとなり、その余の場合に第2過電圧保護モードとなることを特徴とする請求項5に記載のモータ駆動装置。
【請求項7】
前記ロジック回路は、前記モータの回転方向を切り替えるためのモータ回転方向切替信号、前記モータの回転速度を可変制御するためのモータ回転速度制御信号、または、前記モータの回転速度に応じた発振周波数を持つFG信号に基づいて、前記モード切替信号を生成することを特徴とする請求項6に記載のモータ駆動装置。
【請求項8】
前記過電圧保護回路には、複数の電源電圧に対応して複数の保護設定値が設定されていることを特徴とする請求項1〜請求項7のいずれか一項に記載のモータ駆動装置。
【請求項9】
モータと、
前記モータに接続された出力段と、
前記出力段を形成する上側トランジスタと下側トランジスタのオン/オフ制御を行う請求項1〜請求項8のいずれか一項に記載のモータ駆動装置と、
を有することを特徴とする電気機器。
【請求項1】
電源端とモータとの間に接続された上側トランジスタ及び前記モータと接地端との間に接続された下側トランジスタ各々のオン/オフ制御を行うロジック回路と、
前記電源端に印加される電源電圧と所定の保護設定値との比較結果に応じた過電圧保護信号を生成して前記ロジック回路に送出する過電圧保護回路と、
を有し、
前記ロジック回路は、前記電源電圧が前記保護設定値を上回ったときに前記上側トランジスタをオフして前記下側トランジスタをオンすることを特徴とするモータ駆動装置。
【請求項2】
前記ロジック回路は、ブレーキ信号が入力されたときにも前記上側トランジスタをオフとして前記下側トランジスタをオンとすることを特徴とする請求項1に記載のモータ駆動装置。
【請求項3】
前記ロジック回路は、前記電源電圧が所定の保護解除値を下回ったときに前記上側トランジスタ及び前記下側トランジスタ各々のオン/オフ制御を通常時の状態に復帰させることを特徴とする請求項1または請求項2に記載のモータ駆動装置。
【請求項4】
前記ロジック回路は、前記電源電圧が前記保護設定値を上回ってから所定時間が経過したときに前記上側トランジスタ及び前記下側トランジスタ各々のオン/オフ制御を通常時の状態に復帰させることを特徴とする請求項1または請求項2に記載のモータ駆動装置。
【請求項5】
前記ロジック回路は、モード切替信号に応じて、前記上側トランジスタをオフとして前記下側トランジスタをオンとする第1過電圧保護モードと、前記上側トランジスタと前記下側トランジスタをいずれもオフとする第2過電圧保護モードと、を切り替えることを特徴とする請求項1〜請求項4のいずれか一項に記載のモータ駆動装置。
【請求項6】
前記ロジック回路は、前記モータの急制動時に第1過電圧保護モードとなり、その余の場合に第2過電圧保護モードとなることを特徴とする請求項5に記載のモータ駆動装置。
【請求項7】
前記ロジック回路は、前記モータの回転方向を切り替えるためのモータ回転方向切替信号、前記モータの回転速度を可変制御するためのモータ回転速度制御信号、または、前記モータの回転速度に応じた発振周波数を持つFG信号に基づいて、前記モード切替信号を生成することを特徴とする請求項6に記載のモータ駆動装置。
【請求項8】
前記過電圧保護回路には、複数の電源電圧に対応して複数の保護設定値が設定されていることを特徴とする請求項1〜請求項7のいずれか一項に記載のモータ駆動装置。
【請求項9】
モータと、
前記モータに接続された出力段と、
前記出力段を形成する上側トランジスタと下側トランジスタのオン/オフ制御を行う請求項1〜請求項8のいずれか一項に記載のモータ駆動装置と、
を有することを特徴とする電気機器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−102658(P2013−102658A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−246084(P2011−246084)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000116024)ローム株式会社 (3,539)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000116024)ローム株式会社 (3,539)
【Fターム(参考)】
[ Back to top ]