
モータ駆動装置
【課題】本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置に関する。
【解決手段】本発明は、ホール(Hall)センサーの検出信号によって、PWM信号のデューティを調整し、上記デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するようにするデューティ調整部と、外部からのPWM制御信号が入力され、上記デューティ調整部のデューティ調整によって、デューティが調整されるPWM信号を生成する信号生成部と、上記ホール(Hall)センサーの検出信号及び上記信号生成部のPWM信号によってモータ駆動を制御する駆動制御部と、を含むモータ駆動装置を提供する。
【解決手段】本発明は、ホール(Hall)センサーの検出信号によって、PWM信号のデューティを調整し、上記デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するようにするデューティ調整部と、外部からのPWM制御信号が入力され、上記デューティ調整部のデューティ調整によって、デューティが調整されるPWM信号を生成する信号生成部と、上記ホール(Hall)センサーの検出信号及び上記信号生成部のPWM信号によってモータ駆動を制御する駆動制御部と、を含むモータ駆動装置を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置に関する。
【背景技術】
【0002】
一般的に、ブラシレスDCモータ(Brushless DC motor)は、DCモータのうち、ブラシ及び整流子等の機械的な接触部を使用せず、非接触の位置検出機及び半導体素子で電流を通じさせたり、電流方向を調整させる機能を変える直流(DC)モータを意味する。
【0003】
このようなブラシレスDCモータを駆動するために駆動装置を用いることができる。
【0004】
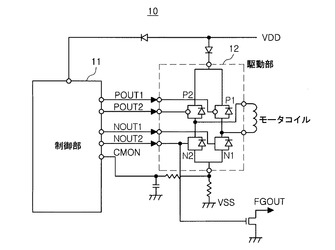
図1は一般的なモータ駆動装置の構成図である。
【0005】
図1を参照すると、一般的なモータ駆動装置10は、制御部11と、駆動部12と、を含むことができる。
【0006】
制御部11はモータの駆動を制御し、駆動部12は制御部11の駆動信号によって、4つのFETがターンオンまたはターンオフされてモータを駆動することができる。
【0007】
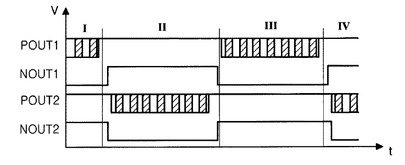
図2はモータ駆動装置の駆動信号である。
【0008】
図2を参照すると、制御部11から駆動部12に伝達される駆動信号は、総4種類に区分されることができ、識別符合I、II、III、IVの順に駆動信号が伝達されることができる。
【0009】
即ち、識別符合Iの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)がターンオンされ、識別符合IIの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)はターンオフされ、第2PMOS FET(P2)及び第1NMOS FET(N1)がターンオンされることができる。
【0010】
また、識別符合IIIの駆動信号によって、第2PMOS FET(P2)及び第1NMOS FET(N1)はターンオフされ、第1PMOS FET(P1)及び第2NMOS FET(N2)がターンオンされ、識別符合IVの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)はターンオフされ、第2PMOS FET(P2)及び第1NMOS FET(N1)がターンオンされることができる。
【0011】
このような駆動方式によって、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされる際、PWM信号(図2の斜線部分)を発生させてモータの速度を調節することができる。
【0012】
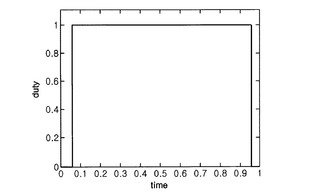
図3は一般的なPWM信号のオン−デューティグラフである。
【0013】
図3を参照すると、一般的なPWM信号のオン−デューティグラフは、長方形で具現されることができる。
【0014】
しかしながら、このような一般的なPWM信号によって、モータに流れる電流が急激に変化して過電流が発生する問題点がある。
【0015】
このような問題点を克服するため、ソフトスイッチング方式でPWM信号のデューティを調整することもできる。
【0016】
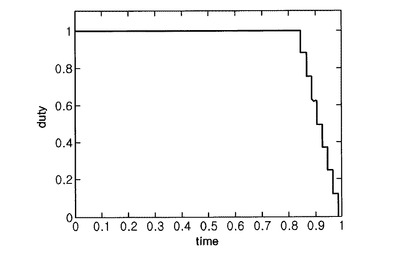
図4はソフトスイッチング方式が具現されたPWM信号のオン−デューティグラフである。
【0017】
図4を参照すると、ソフトスイッチング方式が具現されたPWM信号のオン−デューティは、信号が終わる部分のデューティを調整できるが、PWM信号のオン−デューティによってモータの速度が調節される点を考慮すると、モータを目標速度で制御できないという問題点がある。
【発明の概要】
【発明が解決しようとする課題】
【0018】
本発明の課題は上記した問題点を解決するためのもので、本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置を提供する。
【課題を解決するための手段】
【0019】
上述した本発明の課題を解決するため、本発明の一つの技術的な側面は、ホール(Hall)センサーの検出信号によって、PWM(pulse width modulation)信号のデューティを調整し、上記デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するようにするデューティ調整部と、外部からのPWM制御信号が入力され、上記デューティ調整部のデューティ調整によって、デューティが調整されるPWM信号を生成する信号生成部と、上記ホール(Hall)センサーの検出信号及び上記信号生成部のPWM信号によって、モータの駆動を制御する駆動制御部と、を含むモータ駆動装置を提供する。
【0020】
本発明の一つの技術的な側面によると、上記駆動制御部の駆動制御によって、モータを駆動させる駆動部をさらに含むことができる。
【0021】
本発明の一つの技術的な側面によると、上記デューティ調整部は、上記ホール(Hall)センサーの検出信号によって、モータを駆動するスイッチのスイッチングオン/オフを決定するスイッチング信号を生成するスイッチング信号生成部と、上記スイッチング信号生成部のスイッチング信号によって、PWMデューティを調整する区間を決定するタイマーと、上記タイマーの区間によって、デューティを調整してモータを駆動するスイッチをソフトスイッチングさせるソフトスイッチング部と、を含むことができる。
【0022】
本発明の一つの技術的な側面によると、上記信号生成部は、外部からのPWM制御信号を検出する検出部と、上記検出部からの検出値及び上記デューティ調整部のデューティ調整によって、PWM駆動信号を提供する駆動信号生成部と、を含むことができる。
【0023】
本発明の一つの技術的な側面によると、上記駆動部は、電源が供給される電源供給端と接地との間に電気的に連結された第1PMOS FETと、上記第1PMOS FETと接地との間に電気的に連結された第1NMOS FETと、上記電源供給端に上記第1PMOS FETと並列連結され、上記電源供給端と接地との間に電気的に連結された第2PMOS FETと、上記第2PMOS FETと接地との間に電気的に連結された第2NMOS FETと、を含むことができる。
【0024】
本発明の一つの技術的な側面によると、上記PWM駆動信号は、信号が始まる時間から事前に設定された時間までの第1区間と、上記第1区間が終わる時間から事前に設定された他の時間までの第2区間と、上記第2区間が終わる時間から信号が終わる時間までの第3区間と、を含み、上記第1区間のデューティ値は上記目標デューティ値より小さく、上記第2区間のデューティ値は上記目標デューティ値より大きく、上記第3区間のデューティ値は上記目標デューティ値より小さいことができる。
【発明の効果】
【0025】
本発明によると、PWM信号のデューティ全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値と同一になることで、ソフトスイッチングによって過電流が流れることを防止しながらも、モータを所望の目標速度に制御することができる効果がある。
【図面の簡単な説明】
【0026】
【図1】一般的なモータ駆動装置の構成図である。
【図2】モータ駆動装置の駆動信号である。
【図3】一般的なPWM信号のオン−デューティグラフである。
【図4】ソフトスイッチング方式が具現されたPWM信号のオンーデューティグラフである。
【図5】本発明によるモータ駆動装置の構成図である。
【図6】本発明によるモータ駆動装置のPWM信号の実施形態を示すオン−デューティグラフである。
【図7】本発明によるモータ駆動装置のPWM信号の実施形態を示すオン−デューティグラフである。
【図8】本発明によるモータ駆動装置のPWM信号の実施形態を示すオン−デューティグラフである。
【図9】本発明によるモータ駆動装置の駆動信号を示すグラフである。
【図10a】ソフトスイッチング方式が適用されなかったPWM信号の実際のオン−デューティグラフである。
【図10b】ソフトスイッチング方式が適用されたPWM信号の実際のオン−デューティグラフである。
【図10c】本発明によるモータ駆動装置のPWM信号のオン−デューティグラフである。
【発明を実施するための形態】
【0027】
以下では、添付の図面を参照して本発明が属する技術分野において通常の知識を有する者が本発明を容易に行えるように、好ましい実施例を詳細に説明する。
【0028】
但し、本発明の好ましい実施例を詳細に説明するにあたり、関連の公知機能または構成に関する具体的な説明が本発明の要旨を不要にすることができると判断される場合には、その詳細な説明を省略する。
【0029】
また、類似した機能及び作用をする部分に対しては、図面全体にわたって同一符号を使用する。
【0030】
なお、明細書全体において、ある部分と他の部分とが「連結」されているとする際、これは、「直接的に連結」されている場合のみならず、その間に他の素子を介して「間接的に連結」されている場合も含む。
【0031】
また、ある構成要素を「含む」というのは、特に反対される記載がない限り、他の構成要素を除外するのではなく、他の構成要素をさらに含むことができることを意味する。
【0032】
以下では、図面を参照して本発明について詳細に説明する。
【0033】
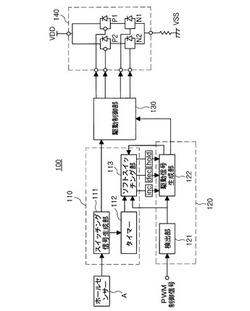
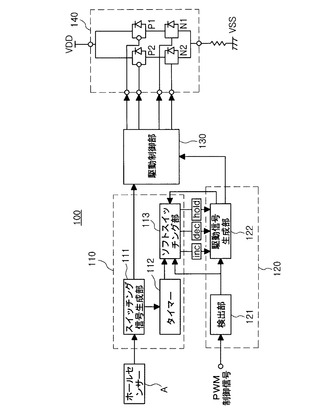
図5は本発明によるモータ駆動装置の構成図である。
【0034】
図5を参照すると、本発明によるモータ駆動装置100は、デューティ調整部110と、信号生成部120と、駆動制御部130と、を含むことができ、さらに駆動部140を含むことができる。
【0035】
デューティ調整部110は、ホール(Hall)センサーAからの検出信号によって、PWM(pulse width modulation)のデューティ(duty)を調整することができる。
【0036】
デューティ調整部110は、スイッチング信号生成部111と、タイマー112と、ソフトスイッチング部113と、を含むことができる。
【0037】
スイッチング信号生成部111は、ホールセンサーAからの検出信号が伝達されて駆動部140のスイッチをオン/オフさせることができるスイッチング信号を提供することができる。ホールセンサーAは、ホール効果によってモータの刺激が変わる瞬間を知らせることができ、スイッチング信号生成部111は、ホールセンサーAからの検出信号によってモータの回転位置が分かるようになり、モータを駆動させることができるスイッチング信号を提供することができる。
【0038】
タイマー112は、スイッチング信号生成部111のスイッチング信号によって、PWMデューティを調整する区間を決定することができる。上述したように、スイッチング信号生成部111のスイッチング信号は、駆動部140のスイッチをオン/オフさせることができ、タイマー112は、駆動部140のスイッチをオン/オフさせるスイッチング信号のうちPWMデューティを調整できるスイッチング信号を選択してPWMデューティを調整する区間を決定することができる。
【0039】
ソフトスイッチング部113は、タイマー112で決定されたデューティ調整区間によって、デューティを調整して駆動部140のスイッチをソフトスイッチングさせることができる。この際、ソフトスイッチング部113において、デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低くするように調節され、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するように調節されることができる。ここで、追従するという意味は、上記デューティの全体区間の平均デューティ値が上記目標デューティ値と一致または一致するように類似して調節されることができることを意味する。
【0040】
信号生成部120は、外部からのPWM制御信号及びデューティ調整部110からのデューティ調整によって、駆動部140のスイッチをソフトスイッチングさせるPWM駆動信号を提供することができる。
【0041】
このため、信号生成部120は、検出部121と、駆動信号生成部122と、を含むことができる。
【0042】
検出部121は、PWM制御信号を検出して駆動信号生成部122に伝達することができる。
【0043】
駆動信号生成部122は、検出部121から検出されたPWM制御信号によってPWM制御を行うが、PWM駆動信号のデューティは、デューティ調整部110からのデューティ調整によって設定されることができる。
【0044】
即ち、ソフトスイッチング部113は、PWM駆動信号のデューティ値を低減(dec)、上昇(inc)または維持(hold)するように調整することができ、駆動信号生成部122は、それによるデューティを有するPWM駆動信号を駆動制御部130に提供することができる。
【0045】
駆動制御部130は、スイッチング信号生成部111からのスイッチング信号及び駆動信号生成部122からPWM駆動信号の提供を受け、上記スイッチング信号及びPWM駆動信号によって、駆動部140のスイッチを駆動させることができる電力レベルを有する駆動信号を駆動部140に提供する。
【0046】
駆動部140は、総4つのスイッチを具備することができ、上記4つのスイッチは、2つのPMOS FET(metal oxide semiconductor field−effect transistor)(P1、P2)及び2つのNMOS FET(N1、N2)で構成されることができる。
【0047】
第1PMOS FET(P1)は、電源(VDD)が供給される電源供給端と接地(VSS)との間に電気的に連結されることができ、第1NMOS FET(N1)は、第1PMOS FET(P1)と接地との間に電気的に連結されることができる。
【0048】
第2PMOS FET(P2)は、上記電源供給端に第1PMOS FET(P1)と並列連結され、上記電源供給端と接地との間に電気的に連結されることができ、第2NMOS FET(N2)は、第2PMOS FET(P2)と接地との間に電気的に連結されることができる。
【0049】
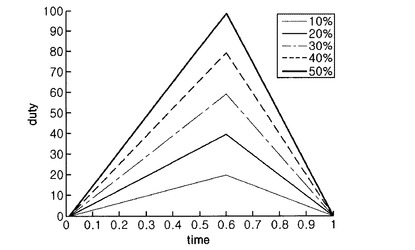
図6から図8は、本発明によるモータ駆動装置のPWM信号の実施形態を示すオン−デューティグラフである。
【0050】
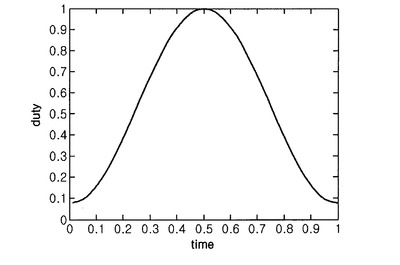
図6から図8を参照すると、本発明によるモータ駆動装置のPWM信号は、第1から第3区間を有することができる。
【0051】
第1区間は信号が始まる時間から事前に設定された時間までであることができ、第2区間は上記第1区間が終わる時間から事前に設定された他の時間までであることができ、第3区間は上記第2区間が終わる時間から信号が終わる時間までであることができる。また、上記第1区間のデューティ値は、上記目標デューティ値より小さく、上記第2区間のデューティ値は、上記目標デューティ値より大きく、上記第3区間のデューティ値は、上記目標デューティ値より小さく、PWM信号全体のデューティ値は、目標デューティ値と同一または殆ど近くなることができる。
【0052】
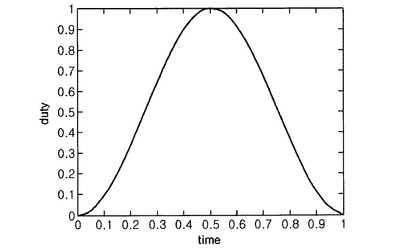
即ち、図6のように三角波状にデューティを調整したり、図7のようにハニングウィンドウ(hanning window)または図8のようにハミングウィンドウ(hamming window)のような形態にデューティを調整することができる。
【0053】
図9は本発明によるモータ駆動装置の駆動信号を示すグラフである。
【0054】
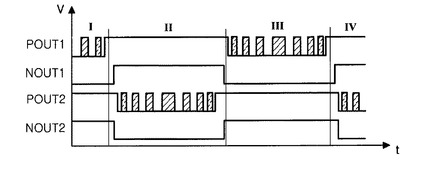
図9を参照すると、駆動制御部130から駆動部140に伝達される駆動信号は、総4種類に区分されることができ、識別符合I、II、III、IVの順に駆動信号が伝達されることができる。
【0055】
即ち、識別符合Iの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)がターンオンされ、識別符合IIの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)はターンオフされ、第2PMOS FET(P2)及び第1NMOS FET(N1)がターンオンされることができる。
【0056】
また、識別符合IIIの駆動信号によって、第2PMOS FET(P2)及び第1NMOS FET(N1)はターンオフされ、第1PMOS FET(P1)及び第2NMOS FET(N2)がターンオンされ、識別符合IVの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)はターンオフされ、第2PMOS FET(P2)及び第1NMOS FET(N1)がターンオンされることができる。
【0057】
このような駆動方式によって、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされる際、PWM信号(図9の斜線部分)を発生させてモータの速度を調節することができる。
【0058】
この際、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされるPWM信号の全体デューティは、目標としたデューティと同一またはそれに近くなることができるが、オン/オフが繰り返されるPWM信号それぞれのデューティは、図6から図8に示されるように、デューティが可変されることができる。これにより、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされる際の斜線で示されるPWM信号のデューティは、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされる信号が始まる地点や終わる地点に近いほど減少し、遠いほど増加することで、全体デューティは目標としたデューティと同一またはそれに近くなることができる。
【0059】
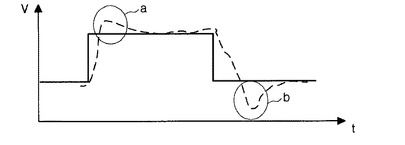
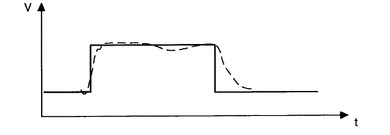
図10a、図10b及び図10cは、それぞれソフトスイッチング方式が適用されなかったPWM信号の実際のオン−デューティグラフ、ソフトスイッチング方式が適用されたPWM信号の実際のオン−デューティグラフ及び本発明によるモータ駆動装置のPWM信号のオン−デューティグラフである。
【0060】
図10aを参照して、ソフトスイッチング方式が適用されなかったPWM信号の実際のオン−デューティの信号波形(点線)を見ると、目標とするPWM信号の信号波形に比べて信号が始まる部分または終わる部分に過電流a、bが発生することが分かる。
【0061】
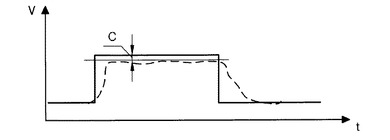
また、図10bを参照して、ソフトスイッチング方式が適用されたPWM信号の実際のオン−デューティの信号波形(点線)を見ると、目標とするPWM信号の信号波形に比べて信号が始まる部分または終わる部分に過電流は殆ど発生しないが、目標とするPWM信号よりレベルが低くなることが分かる。
【0062】
しかしながら、図10cを参照して、本発明によるモータ駆動装置のPWM信号のオン−デューティの信号波形(点線)を見ると、目標とするPWM信号の信号波形に比べて信号が始まる部分または終わる部分に過電流が殆ど発生せず、目標とするPWM信号とレベルが殆ど同一であることが分かる。
【0063】
上述した通り、本発明によると、PWM信号のデューティ全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティ全体区間の平均デューティ値は、上記目標デューティ値と同一になることで、ソフトスイッチングによって過電流が流されることを防止しながらも、モータを所望の目標速度に制御することができる。
【0064】
以上で説明した本発明は、前述した実施例及び添付の図面により限定されず、後述する特許請求の範囲によって限定されており、本発明の技術的思想を外れない範囲内でその構成を多様に変形及び改造できることは、本発明が属する技術分野における通常の知識を有する者であれば容易に理解することができる。
【符号の説明】
【0065】
100 モータ駆動装置
110 デューティ調整部
111 スイッチング信号生成部
112 タイマー
113 ソフトスイッチング部
120 信号生成部
121 検出部
122 駆動信号生成部
130 駆動制御部
140 駆動部
【技術分野】
【0001】
本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置に関する。
【背景技術】
【0002】
一般的に、ブラシレスDCモータ(Brushless DC motor)は、DCモータのうち、ブラシ及び整流子等の機械的な接触部を使用せず、非接触の位置検出機及び半導体素子で電流を通じさせたり、電流方向を調整させる機能を変える直流(DC)モータを意味する。
【0003】
このようなブラシレスDCモータを駆動するために駆動装置を用いることができる。
【0004】
図1は一般的なモータ駆動装置の構成図である。
【0005】
図1を参照すると、一般的なモータ駆動装置10は、制御部11と、駆動部12と、を含むことができる。
【0006】
制御部11はモータの駆動を制御し、駆動部12は制御部11の駆動信号によって、4つのFETがターンオンまたはターンオフされてモータを駆動することができる。
【0007】
図2はモータ駆動装置の駆動信号である。
【0008】
図2を参照すると、制御部11から駆動部12に伝達される駆動信号は、総4種類に区分されることができ、識別符合I、II、III、IVの順に駆動信号が伝達されることができる。
【0009】
即ち、識別符合Iの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)がターンオンされ、識別符合IIの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)はターンオフされ、第2PMOS FET(P2)及び第1NMOS FET(N1)がターンオンされることができる。
【0010】
また、識別符合IIIの駆動信号によって、第2PMOS FET(P2)及び第1NMOS FET(N1)はターンオフされ、第1PMOS FET(P1)及び第2NMOS FET(N2)がターンオンされ、識別符合IVの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)はターンオフされ、第2PMOS FET(P2)及び第1NMOS FET(N1)がターンオンされることができる。
【0011】
このような駆動方式によって、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされる際、PWM信号(図2の斜線部分)を発生させてモータの速度を調節することができる。
【0012】
図3は一般的なPWM信号のオン−デューティグラフである。
【0013】
図3を参照すると、一般的なPWM信号のオン−デューティグラフは、長方形で具現されることができる。
【0014】
しかしながら、このような一般的なPWM信号によって、モータに流れる電流が急激に変化して過電流が発生する問題点がある。
【0015】
このような問題点を克服するため、ソフトスイッチング方式でPWM信号のデューティを調整することもできる。
【0016】
図4はソフトスイッチング方式が具現されたPWM信号のオン−デューティグラフである。
【0017】
図4を参照すると、ソフトスイッチング方式が具現されたPWM信号のオン−デューティは、信号が終わる部分のデューティを調整できるが、PWM信号のオン−デューティによってモータの速度が調節される点を考慮すると、モータを目標速度で制御できないという問題点がある。
【発明の概要】
【発明が解決しようとする課題】
【0018】
本発明の課題は上記した問題点を解決するためのもので、本発明は、目標速度を維持しながら、駆動電流の過電流を防止できるモータ駆動装置を提供する。
【課題を解決するための手段】
【0019】
上述した本発明の課題を解決するため、本発明の一つの技術的な側面は、ホール(Hall)センサーの検出信号によって、PWM(pulse width modulation)信号のデューティを調整し、上記デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するようにするデューティ調整部と、外部からのPWM制御信号が入力され、上記デューティ調整部のデューティ調整によって、デューティが調整されるPWM信号を生成する信号生成部と、上記ホール(Hall)センサーの検出信号及び上記信号生成部のPWM信号によって、モータの駆動を制御する駆動制御部と、を含むモータ駆動装置を提供する。
【0020】
本発明の一つの技術的な側面によると、上記駆動制御部の駆動制御によって、モータを駆動させる駆動部をさらに含むことができる。
【0021】
本発明の一つの技術的な側面によると、上記デューティ調整部は、上記ホール(Hall)センサーの検出信号によって、モータを駆動するスイッチのスイッチングオン/オフを決定するスイッチング信号を生成するスイッチング信号生成部と、上記スイッチング信号生成部のスイッチング信号によって、PWMデューティを調整する区間を決定するタイマーと、上記タイマーの区間によって、デューティを調整してモータを駆動するスイッチをソフトスイッチングさせるソフトスイッチング部と、を含むことができる。
【0022】
本発明の一つの技術的な側面によると、上記信号生成部は、外部からのPWM制御信号を検出する検出部と、上記検出部からの検出値及び上記デューティ調整部のデューティ調整によって、PWM駆動信号を提供する駆動信号生成部と、を含むことができる。
【0023】
本発明の一つの技術的な側面によると、上記駆動部は、電源が供給される電源供給端と接地との間に電気的に連結された第1PMOS FETと、上記第1PMOS FETと接地との間に電気的に連結された第1NMOS FETと、上記電源供給端に上記第1PMOS FETと並列連結され、上記電源供給端と接地との間に電気的に連結された第2PMOS FETと、上記第2PMOS FETと接地との間に電気的に連結された第2NMOS FETと、を含むことができる。
【0024】
本発明の一つの技術的な側面によると、上記PWM駆動信号は、信号が始まる時間から事前に設定された時間までの第1区間と、上記第1区間が終わる時間から事前に設定された他の時間までの第2区間と、上記第2区間が終わる時間から信号が終わる時間までの第3区間と、を含み、上記第1区間のデューティ値は上記目標デューティ値より小さく、上記第2区間のデューティ値は上記目標デューティ値より大きく、上記第3区間のデューティ値は上記目標デューティ値より小さいことができる。
【発明の効果】
【0025】
本発明によると、PWM信号のデューティ全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値と同一になることで、ソフトスイッチングによって過電流が流れることを防止しながらも、モータを所望の目標速度に制御することができる効果がある。
【図面の簡単な説明】
【0026】
【図1】一般的なモータ駆動装置の構成図である。
【図2】モータ駆動装置の駆動信号である。
【図3】一般的なPWM信号のオン−デューティグラフである。
【図4】ソフトスイッチング方式が具現されたPWM信号のオンーデューティグラフである。
【図5】本発明によるモータ駆動装置の構成図である。
【図6】本発明によるモータ駆動装置のPWM信号の実施形態を示すオン−デューティグラフである。
【図7】本発明によるモータ駆動装置のPWM信号の実施形態を示すオン−デューティグラフである。
【図8】本発明によるモータ駆動装置のPWM信号の実施形態を示すオン−デューティグラフである。
【図9】本発明によるモータ駆動装置の駆動信号を示すグラフである。
【図10a】ソフトスイッチング方式が適用されなかったPWM信号の実際のオン−デューティグラフである。
【図10b】ソフトスイッチング方式が適用されたPWM信号の実際のオン−デューティグラフである。
【図10c】本発明によるモータ駆動装置のPWM信号のオン−デューティグラフである。
【発明を実施するための形態】
【0027】
以下では、添付の図面を参照して本発明が属する技術分野において通常の知識を有する者が本発明を容易に行えるように、好ましい実施例を詳細に説明する。
【0028】
但し、本発明の好ましい実施例を詳細に説明するにあたり、関連の公知機能または構成に関する具体的な説明が本発明の要旨を不要にすることができると判断される場合には、その詳細な説明を省略する。
【0029】
また、類似した機能及び作用をする部分に対しては、図面全体にわたって同一符号を使用する。
【0030】
なお、明細書全体において、ある部分と他の部分とが「連結」されているとする際、これは、「直接的に連結」されている場合のみならず、その間に他の素子を介して「間接的に連結」されている場合も含む。
【0031】
また、ある構成要素を「含む」というのは、特に反対される記載がない限り、他の構成要素を除外するのではなく、他の構成要素をさらに含むことができることを意味する。
【0032】
以下では、図面を参照して本発明について詳細に説明する。
【0033】
図5は本発明によるモータ駆動装置の構成図である。
【0034】
図5を参照すると、本発明によるモータ駆動装置100は、デューティ調整部110と、信号生成部120と、駆動制御部130と、を含むことができ、さらに駆動部140を含むことができる。
【0035】
デューティ調整部110は、ホール(Hall)センサーAからの検出信号によって、PWM(pulse width modulation)のデューティ(duty)を調整することができる。
【0036】
デューティ調整部110は、スイッチング信号生成部111と、タイマー112と、ソフトスイッチング部113と、を含むことができる。
【0037】
スイッチング信号生成部111は、ホールセンサーAからの検出信号が伝達されて駆動部140のスイッチをオン/オフさせることができるスイッチング信号を提供することができる。ホールセンサーAは、ホール効果によってモータの刺激が変わる瞬間を知らせることができ、スイッチング信号生成部111は、ホールセンサーAからの検出信号によってモータの回転位置が分かるようになり、モータを駆動させることができるスイッチング信号を提供することができる。
【0038】
タイマー112は、スイッチング信号生成部111のスイッチング信号によって、PWMデューティを調整する区間を決定することができる。上述したように、スイッチング信号生成部111のスイッチング信号は、駆動部140のスイッチをオン/オフさせることができ、タイマー112は、駆動部140のスイッチをオン/オフさせるスイッチング信号のうちPWMデューティを調整できるスイッチング信号を選択してPWMデューティを調整する区間を決定することができる。
【0039】
ソフトスイッチング部113は、タイマー112で決定されたデューティ調整区間によって、デューティを調整して駆動部140のスイッチをソフトスイッチングさせることができる。この際、ソフトスイッチング部113において、デューティの全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低くするように調節され、上記デューティの全体区間の平均デューティ値は、上記目標デューティ値を追従するように調節されることができる。ここで、追従するという意味は、上記デューティの全体区間の平均デューティ値が上記目標デューティ値と一致または一致するように類似して調節されることができることを意味する。
【0040】
信号生成部120は、外部からのPWM制御信号及びデューティ調整部110からのデューティ調整によって、駆動部140のスイッチをソフトスイッチングさせるPWM駆動信号を提供することができる。
【0041】
このため、信号生成部120は、検出部121と、駆動信号生成部122と、を含むことができる。
【0042】
検出部121は、PWM制御信号を検出して駆動信号生成部122に伝達することができる。
【0043】
駆動信号生成部122は、検出部121から検出されたPWM制御信号によってPWM制御を行うが、PWM駆動信号のデューティは、デューティ調整部110からのデューティ調整によって設定されることができる。
【0044】
即ち、ソフトスイッチング部113は、PWM駆動信号のデューティ値を低減(dec)、上昇(inc)または維持(hold)するように調整することができ、駆動信号生成部122は、それによるデューティを有するPWM駆動信号を駆動制御部130に提供することができる。
【0045】
駆動制御部130は、スイッチング信号生成部111からのスイッチング信号及び駆動信号生成部122からPWM駆動信号の提供を受け、上記スイッチング信号及びPWM駆動信号によって、駆動部140のスイッチを駆動させることができる電力レベルを有する駆動信号を駆動部140に提供する。
【0046】
駆動部140は、総4つのスイッチを具備することができ、上記4つのスイッチは、2つのPMOS FET(metal oxide semiconductor field−effect transistor)(P1、P2)及び2つのNMOS FET(N1、N2)で構成されることができる。
【0047】
第1PMOS FET(P1)は、電源(VDD)が供給される電源供給端と接地(VSS)との間に電気的に連結されることができ、第1NMOS FET(N1)は、第1PMOS FET(P1)と接地との間に電気的に連結されることができる。
【0048】
第2PMOS FET(P2)は、上記電源供給端に第1PMOS FET(P1)と並列連結され、上記電源供給端と接地との間に電気的に連結されることができ、第2NMOS FET(N2)は、第2PMOS FET(P2)と接地との間に電気的に連結されることができる。
【0049】
図6から図8は、本発明によるモータ駆動装置のPWM信号の実施形態を示すオン−デューティグラフである。
【0050】
図6から図8を参照すると、本発明によるモータ駆動装置のPWM信号は、第1から第3区間を有することができる。
【0051】
第1区間は信号が始まる時間から事前に設定された時間までであることができ、第2区間は上記第1区間が終わる時間から事前に設定された他の時間までであることができ、第3区間は上記第2区間が終わる時間から信号が終わる時間までであることができる。また、上記第1区間のデューティ値は、上記目標デューティ値より小さく、上記第2区間のデューティ値は、上記目標デューティ値より大きく、上記第3区間のデューティ値は、上記目標デューティ値より小さく、PWM信号全体のデューティ値は、目標デューティ値と同一または殆ど近くなることができる。
【0052】
即ち、図6のように三角波状にデューティを調整したり、図7のようにハニングウィンドウ(hanning window)または図8のようにハミングウィンドウ(hamming window)のような形態にデューティを調整することができる。
【0053】
図9は本発明によるモータ駆動装置の駆動信号を示すグラフである。
【0054】
図9を参照すると、駆動制御部130から駆動部140に伝達される駆動信号は、総4種類に区分されることができ、識別符合I、II、III、IVの順に駆動信号が伝達されることができる。
【0055】
即ち、識別符合Iの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)がターンオンされ、識別符合IIの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)はターンオフされ、第2PMOS FET(P2)及び第1NMOS FET(N1)がターンオンされることができる。
【0056】
また、識別符合IIIの駆動信号によって、第2PMOS FET(P2)及び第1NMOS FET(N1)はターンオフされ、第1PMOS FET(P1)及び第2NMOS FET(N2)がターンオンされ、識別符合IVの駆動信号によって、第1PMOS FET(P1)及び第2NMOS FET(N2)はターンオフされ、第2PMOS FET(P2)及び第1NMOS FET(N1)がターンオンされることができる。
【0057】
このような駆動方式によって、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされる際、PWM信号(図9の斜線部分)を発生させてモータの速度を調節することができる。
【0058】
この際、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされるPWM信号の全体デューティは、目標としたデューティと同一またはそれに近くなることができるが、オン/オフが繰り返されるPWM信号それぞれのデューティは、図6から図8に示されるように、デューティが可変されることができる。これにより、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされる際の斜線で示されるPWM信号のデューティは、第1PMOS FET(P1)及び第2PMOS FET(P2)がターンオンされる信号が始まる地点や終わる地点に近いほど減少し、遠いほど増加することで、全体デューティは目標としたデューティと同一またはそれに近くなることができる。
【0059】
図10a、図10b及び図10cは、それぞれソフトスイッチング方式が適用されなかったPWM信号の実際のオン−デューティグラフ、ソフトスイッチング方式が適用されたPWM信号の実際のオン−デューティグラフ及び本発明によるモータ駆動装置のPWM信号のオン−デューティグラフである。
【0060】
図10aを参照して、ソフトスイッチング方式が適用されなかったPWM信号の実際のオン−デューティの信号波形(点線)を見ると、目標とするPWM信号の信号波形に比べて信号が始まる部分または終わる部分に過電流a、bが発生することが分かる。
【0061】
また、図10bを参照して、ソフトスイッチング方式が適用されたPWM信号の実際のオン−デューティの信号波形(点線)を見ると、目標とするPWM信号の信号波形に比べて信号が始まる部分または終わる部分に過電流は殆ど発生しないが、目標とするPWM信号よりレベルが低くなることが分かる。
【0062】
しかしながら、図10cを参照して、本発明によるモータ駆動装置のPWM信号のオン−デューティの信号波形(点線)を見ると、目標とするPWM信号の信号波形に比べて信号が始まる部分または終わる部分に過電流が殆ど発生せず、目標とするPWM信号とレベルが殆ど同一であることが分かる。
【0063】
上述した通り、本発明によると、PWM信号のデューティ全体区間のうち少なくとも一部区間のデューティ値は、制御しようとする目標デューティ値より高く、少なくとも他の一部区間のデューティ値は、制御しようとする目標デューティ値より低く、上記デューティ全体区間の平均デューティ値は、上記目標デューティ値と同一になることで、ソフトスイッチングによって過電流が流されることを防止しながらも、モータを所望の目標速度に制御することができる。
【0064】
以上で説明した本発明は、前述した実施例及び添付の図面により限定されず、後述する特許請求の範囲によって限定されており、本発明の技術的思想を外れない範囲内でその構成を多様に変形及び改造できることは、本発明が属する技術分野における通常の知識を有する者であれば容易に理解することができる。
【符号の説明】
【0065】
100 モータ駆動装置
110 デューティ調整部
111 スイッチング信号生成部
112 タイマー
113 ソフトスイッチング部
120 信号生成部
121 検出部
122 駆動信号生成部
130 駆動制御部
140 駆動部
【特許請求の範囲】
【請求項1】
ホール(Hall)センサーの検出信号に基づき、PWM(pulse width modulation)駆動信号のデューティ(duty)を調整するデューティ調整部と、
外部からPWM制御信号が入力され、前記デューティ調整部によってデューティが調整されたPWM駆動信号を生成する信号生成部と、
前記ホール(Hall)センサーの検出信号に基づく信号、及び前記信号生成部に生成されたPWM駆動信号によってモータの駆動を制御する駆動制御部と
を含み、
前記デューティ調整部は、デューティが調整される全体区間のうち少なくとも一部区間のデューティ値を、予め定められた目標デューティ値より高く、少なくとも他の一部区間のデューティ値を、前記目標デューティ値より低く、前記全体区間の平均デューティ値を、前記目標デューティ値に追従させる、モータ駆動装置。
【請求項2】
前記駆動制御部の駆動制御によって、前記モータを駆動させる駆動部をさらに含む、請求項1に記載のモータ駆動装置。
【請求項3】
前記駆動部は、
電源が供給される電源供給端と接地との間に電気的に連結された第1PMOS FETと、
前記第1PMOS FETと接地との間に電気的に連結された第1NMOS FETと、
前記電源供給端に前記第1PMOS FETと並列連結され、前記電源供給端と接地との間に電気的に連結された第2PMOS FETと、
前記第2PMOS FETと接地との間に電気的に連結された第2NMOS FETと
を含む、請求項2に記載のモータ駆動装置。
【請求項4】
前記デューティ調整部は、
前記ホール(Hall)センサーの検出信号に基づき、前記モータを駆動するスイッチのスイッチングオン/オフを決定するスイッチング信号を生成するスイッチング信号生成部と、
前記スイッチング信号に基づき、デューティを調整する区間を決定するタイマーと、
前記タイマーに決定された区間にデューティを調整して、前記モータを駆動するスイッチをソフトスイッチングさせるソフトスイッチング部と
を含む、請求項1から3の何れか1項に記載のモータ駆動装置。
【請求項5】
前記信号生成部は、
外部からのPWM制御信号を検出する検出部と、
前記検出部が検出した検出値及び前記デューティ調整部によるデューティの調整によって、PWM駆動信号を提供する駆動信号生成部と
を含む、請求項1から4の何れか1項に記載のモータ駆動装置。
【請求項6】
前記PWM駆動信号は、信号が始まる時間から事前に設定された時間までの第1区間と、前記第1区間が終わる時間から事前に設定された他の時間までの第2区間と、前記第2区間が終わる時間から信号が終わる時間までの第3区間と、を含み、
前記第1区間のデューティ値は、前記目標デューティ値より小さく、
前記第2区間のデューティ値は、前記目標デューティ値より大きく、
前記第3区間のデューティ値は、前記目標デューティ値より小さい、請求項5に記載のモータ駆動装置。
【請求項1】
ホール(Hall)センサーの検出信号に基づき、PWM(pulse width modulation)駆動信号のデューティ(duty)を調整するデューティ調整部と、
外部からPWM制御信号が入力され、前記デューティ調整部によってデューティが調整されたPWM駆動信号を生成する信号生成部と、
前記ホール(Hall)センサーの検出信号に基づく信号、及び前記信号生成部に生成されたPWM駆動信号によってモータの駆動を制御する駆動制御部と
を含み、
前記デューティ調整部は、デューティが調整される全体区間のうち少なくとも一部区間のデューティ値を、予め定められた目標デューティ値より高く、少なくとも他の一部区間のデューティ値を、前記目標デューティ値より低く、前記全体区間の平均デューティ値を、前記目標デューティ値に追従させる、モータ駆動装置。
【請求項2】
前記駆動制御部の駆動制御によって、前記モータを駆動させる駆動部をさらに含む、請求項1に記載のモータ駆動装置。
【請求項3】
前記駆動部は、
電源が供給される電源供給端と接地との間に電気的に連結された第1PMOS FETと、
前記第1PMOS FETと接地との間に電気的に連結された第1NMOS FETと、
前記電源供給端に前記第1PMOS FETと並列連結され、前記電源供給端と接地との間に電気的に連結された第2PMOS FETと、
前記第2PMOS FETと接地との間に電気的に連結された第2NMOS FETと
を含む、請求項2に記載のモータ駆動装置。
【請求項4】
前記デューティ調整部は、
前記ホール(Hall)センサーの検出信号に基づき、前記モータを駆動するスイッチのスイッチングオン/オフを決定するスイッチング信号を生成するスイッチング信号生成部と、
前記スイッチング信号に基づき、デューティを調整する区間を決定するタイマーと、
前記タイマーに決定された区間にデューティを調整して、前記モータを駆動するスイッチをソフトスイッチングさせるソフトスイッチング部と
を含む、請求項1から3の何れか1項に記載のモータ駆動装置。
【請求項5】
前記信号生成部は、
外部からのPWM制御信号を検出する検出部と、
前記検出部が検出した検出値及び前記デューティ調整部によるデューティの調整によって、PWM駆動信号を提供する駆動信号生成部と
を含む、請求項1から4の何れか1項に記載のモータ駆動装置。
【請求項6】
前記PWM駆動信号は、信号が始まる時間から事前に設定された時間までの第1区間と、前記第1区間が終わる時間から事前に設定された他の時間までの第2区間と、前記第2区間が終わる時間から信号が終わる時間までの第3区間と、を含み、
前記第1区間のデューティ値は、前記目標デューティ値より小さく、
前記第2区間のデューティ値は、前記目標デューティ値より大きく、
前記第3区間のデューティ値は、前記目標デューティ値より小さい、請求項5に記載のモータ駆動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10a】
【図10b】
【図10c】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10a】
【図10b】
【図10c】
【公開番号】特開2013−94042(P2013−94042A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−7288(P2012−7288)
【出願日】平成24年1月17日(2012.1.17)
【出願人】(594023722)サムソン エレクトロ−メカニックス カンパニーリミテッド. (1,585)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成24年1月17日(2012.1.17)
【出願人】(594023722)サムソン エレクトロ−メカニックス カンパニーリミテッド. (1,585)
【Fターム(参考)】
[ Back to top ]