
モータ
【課題】径方向の振動を低減するとともに、モータの体格を小さくすることができるモータを提供することにある。
【解決手段】筒状ハウジング3のリアカバー壁3aは、その外周縁から平坦部31、振動吸収部32、振動受け部33、軸受収容部34が形成されている。軸受収容部34は、振動受け部33の内側内周縁から軸線方向リア側に向かって膨出形成した円筒部であって、そのリア側の外側円筒面が前記平坦部31のリア側外側面よりもリア側に突出しないように形成されている。そして、この軸受14からの径方向の振動は、それぞれ平坦部31よりロータ側に位置する軸受収容部34に伝わって、振動受け部33を介して振動吸収部32に伝達される。振動吸収部32は、平坦部31側の基端部を支点とし、振動受け部33側の先端部を作用点として、撓んで振動を吸収する。
【解決手段】筒状ハウジング3のリアカバー壁3aは、その外周縁から平坦部31、振動吸収部32、振動受け部33、軸受収容部34が形成されている。軸受収容部34は、振動受け部33の内側内周縁から軸線方向リア側に向かって膨出形成した円筒部であって、そのリア側の外側円筒面が前記平坦部31のリア側外側面よりもリア側に突出しないように形成されている。そして、この軸受14からの径方向の振動は、それぞれ平坦部31よりロータ側に位置する軸受収容部34に伝わって、振動受け部33を介して振動吸収部32に伝達される。振動吸収部32は、平坦部31側の基端部を支点とし、振動受け部33側の先端部を作用点として、撓んで振動を吸収する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータに関するものである。
【背景技術】
【0002】
従来、モータ、例えば、ブラシレスモータにおいて、ロータに取着する磁石を半減させてなるコンシクエントポール型のモータが提案されている(例えば、特許文献1)。コンシクエントポール型のモータは、ロータに取着する磁石を半減できるため低コスト化を図る上では優れている。
【0003】
また、ブラシレスモータにおいて、ステータにロータの磁極当たり多数の周方向スロットが形成され、その多数の周方向スロットにSC巻線を施したモータが種々提案されている(例えば、特許文献2)。このモータは、ロータの磁極当たりのスロット数が多くコギングトルクの低減を図ることができるとともに、スロット内の巻線の占有率が向上し、出力当たりのモータの体格が小さくなることが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−327139号公報
【特許文献2】特開平11−98788号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記コンシクエントポール型のモータは、ロータの周方向に交互に形成される異なる磁極(N極とS極)の磁気的バランスがアンバランスになることから、コギングトルクが大きくなるとともに、径方向の振動が大きくなる問題があった。特に、磁極対数が奇数のロータの場合には、径方向の振動が特に大きくなる傾向にあった。
【0006】
また、SC巻線を施したモータおいては、SC巻線が各スロットにU字状のセグメントを軸方向から挿入し、反対側を後工程において溶接等で接続して周方向に連続巻線を形成する巻線である。そのため、ステータの軸線方向外側にその溶接部分のスペースを確保しなければならない問題があった。その結果、ステータの軸線方向の全長が長くなり、ひいては、モータの体格が大きくなる問題があった。
【0007】
そこで、ロータをコンシクエントポール型のロータとSC巻線を施したステータとを共に利用したモータが考えられる。
このモータにおいては、コギングトルクの低減が図れるとともに安価なモータが提供できる。しかしながら、コンシクエントポール型ロータの磁気的アンバランスに基づく径方向の振動と、SC巻線を施したステータに基づくステータの軸線方向の全長が長くなることによるモータの体格が大きくなる問題が依然解消されてない。
【0008】
本発明は上記問題点を解消するためになされたものであって、その目的は、径方向の振動を低減するとともに、モータの体格を小さくすることができるモータを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために、請求項1に記載の発明は、2×p極(但し、pは極数対)の磁極が周方向に交互に配置されたコンシクエントポール型のロータと、前記ロータを内包し、前記ロータの1磁極当たり複数個設けられる、前記ロータと径方向に対向して2×p×m×n個(但し、mはステータ巻線の相数、nは自然数)のティース及びスロットを有するコアと前記スロットに巻回された多相の巻線とを有するステータとを備え、前記ロータ及び前記ステータが筒状モータケースに内包されてなるモータであって、筒状モータケースの軸方向のリア側壁面またはフロント側壁面の少なくともいずれか一方の壁面は、前記壁面の外周縁から径方向内側に向かって前記ステータの径方向内周端より内側となる径方向位置まで延出形成した平坦部と、前記壁面の中央部であって前記平坦部より前記ロータ側に開口部を有し、前記ロータに固着した回転軸を回転可能に支持する軸受を前記開口部から収容し固定する軸受収容部とを備えた。
【0010】
請求項1に記載の発明によれば、軸受収容部の開口部が平坦部よりロータ側に位置するため、回転軸が径方向に振動しその振動によって軸受及び軸受収容部が径方向に振動しても、軸受収容部が撓み、その振動を吸収し平坦部への振動を低減し、筒状モータケースの径方向の外周面への振動が抑制され、モータを静かに回転させることができる。
【0011】
また、軸受収容部を平坦部よりロータ側に形成したので、その分だけ軸線方向の長さを小さくでき、モータの軸線方向の全長を短くできる。
請求項2に記載の発明は、請求項1に記載のモータにおいて、前記軸受収容部は、前記ロータ側の開口部の先端が径方向において前記磁極と前記回転軸との間に位置するように形成されている。
【0012】
請求項2に記載の発明によれば、回転軸に磁束が漏れることを抑制することができる。
請求項3に記載の発明は、請求項1又は2に記載のモータにおいて、前記回転軸のリア側先端面には、前記回転軸の回転を検出する検出用マグネットが取着されている。
【0013】
請求項3に記載の発明によれば、回転軸と一体回転する検出用マグネットの回転角を検出することによって、その時々の回転軸の回転角度、回転速度等を検出することができる。その結果、巻線の各相へ電力供給タイミングを設定できる。
【0014】
請求項4に記載の発明は、請求項1〜3のいずれか1に記載のモータにおいて、前記スロットに巻回された巻線は、SC巻線である。
請求項4に記載の発明によれば、SC巻線にしたことにより、スロット内の巻線の占有率が向上し、出力当たりのモータの体格を小さくすることができる。
【0015】
請求項5に記載の発明は、前記請求項1〜4にいずれか1に記載のモータにおいて、前記平坦部と軸受収容部の間には、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円筒形状の振動吸収部と、前記ロータ側に延びた前記振動吸収部の先端円周縁と前記軸受収容部のロータ側の開口部とを連結する環状平板形状の振動受け部とが設けられている。
【0016】
請求項5に記載の発明によれば、回転軸が径方向に振動しその振動によって軸受及び軸受収容部が径方向に振動しても、さらに振動吸収部がその振動を吸収し平坦部への振動を低減し、筒状モータケースの径方向の外周面への振動が抑制され、モータを静かに回転させることができる。
【0017】
請求項6に記載の発明は、前記請求項5に記載のモータにおいて、前記振動吸収部は、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円錐筒形状の筒体であって、そのロータ側に縮径して延びた先端円周縁に前記振動受け部の外周端が連結される。
【0018】
請求項6に記載の発明によれば、振動吸収部を円錐筒形状にしたことにより、回転軸が
径方向に振動しその振動によって軸受及び軸受収容部が径方向に振動しても、さらにその振動を吸収する。
【0019】
請求項7に記載の発明は、前記請求項4〜6のいずれか1に記載のモータにおいて、前記軸受収容部は、前記SC巻線の前記ステータから軸線方向に突出した部位と軸方向で重なる位置に設けられている。
【0020】
請求項7に記載の発明によれば、軸受収容部は、前記SC巻線のステータから軸線方向に突出した部位と軸方向で重なる位置に設けられている。そのため、軸受収容部は、ステータから軸線方向に突出した部位よりさらに軸線方向に突出しないことから、モータの軸線方向の全長を短くできる。
【0021】
請求項8に記載の発明は、前記請求項1〜7のいずれか1に記載のモータにおいて、前記コンシクエントポール型のロータの極数対は、奇数倍である。
請求項8に記載の発明によれば、磁気アンバランスが大きく回転中に径方向の振動が大きい極数対が奇数倍コンシクエントポール型のロータであっても、その大きな径方向の振動を低減させることができる。
【0022】
請求項9に記載の発明は、前記請求項1〜8のいずれか1に記載のモータにおいて、前記コンシクエントポール型のロータは、ロータコア材より比重及び磁性が小さい小磁性軽量部分を形成した。
【0023】
請求項9に記載の発明によれば、ロータを軽量にし、モータ全体の重量を軽量化することができる。
請求項10に記載の発明は、請求項1〜9のいずれか1に記載のモータにおいて、前記回転軸のリア側先端面には、前記回転軸の回転を検出する検出用マグネットが取着され、前記平坦部と軸受収容部の間には、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円筒形状の振動吸収部を備え、前記検出用マグネットは、前記平坦部より前記軸方向のフロント側となる位置に設けられた。
【0024】
請求項10に記載の発明によれば、回転軸のリア側の端面(先端面)に取着される検出用マグネットがモータケースの軸方向の一方側の端部である平坦部よりも他方側とされて一方側の端部から突出することがないため、モータの軸方向の全長を短くできる。
【0025】
請求項11に記載の発明は、請求項10に記載のモータにおいて、前記検出用マグネットを検出する検出センサが配置される回路基板を備え、前記回路基板は前記平坦部と軸方向で当接配置される。
【0026】
請求項11に記載の発明によれば、検出用マグネットを検出する検出センサが配置される回路基板が平坦部と軸方向で当接配置されるため、平坦部と回路基板とを離間した場合と比較して軸方向の距離を抑えることができ、モータの軸方向の全長を短くできる。
【0027】
請求項12に記載の発明は、請求項10又は11に記載のモータにおいて、前記筒状モータケースの軸方向のリア側壁面に前記回転軸を挿通するための貫通孔が形成され、前記貫通孔の孔径は、前記検出用マグネットよりも小さく形成される。
【0028】
請求項12に記載の発明によれば、貫通孔を小さくして回転軸に近接させることができ、ロータを構成するマグネットから回転軸に磁束が漏れたとしても貫通孔(モータケース)及びステータを介してロータを構成するマグネットにその磁束が戻る。これにより、検出用マグネットへの影響を小さくすることができる。
【0029】
請求項13に記載の発明は、請求項1〜12のいずれか1に記載のモータを電動パワーステアリングモータに用いた。
請求項13に記載の発明によれば、電動パワーステアリングモータは、軸線方向の全長を小さくすることができ、回転中においては径方向の振動が抑制され、静かに回転する。
【発明の効果】
【0030】
本発明によれば、径方向の振動を低減するとともに、モータの体格を小さくすることができる。
【図面の簡単な説明】
【0031】
【図1】本実施形態のブラシレスモータの断面図。
【図2】本実施形態のステータの断面図。
【図3】本実施形態の3相巻線の一部展開図。
【図4】同じく3相巻線の一部展開図。
【図5】スロット挿入前のセグメントの斜視図。
【図6】スロット挿入後のセグメントの斜視図。
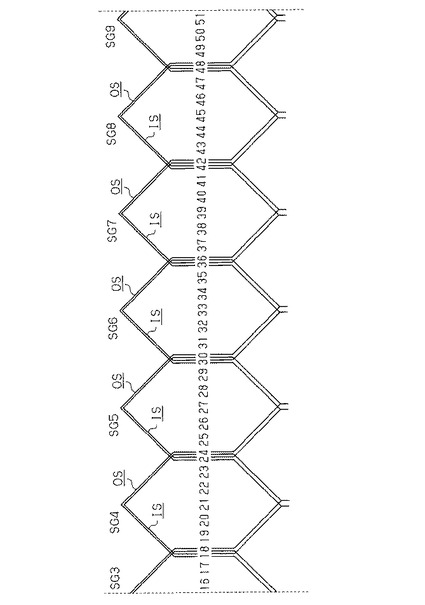
【図7】第1系統のU1相の巻線の一部展開図。
【図8】同じく第1系統のU1相の巻線の一部展開図。
【図9】セグメントの各導体部がスロットに挿入された状態を示す断面図。
【図10】第1系統3相巻線の電気回路図。
【図11】第2系統のU2相の巻線の一部展開図。
【図12】同じく第2系統のU2相の巻線の一部展開図。
【図13】第2系統3相巻線の電気回路図。
【図14】コンシクエントポール型のロータを説明するための斜視図。
【図15】コンシクエントポール型のロータコアを説明するための斜視図。
【図16】ステータとロータを説明するための軸方向からみた正面図。
【図17】本発明の別例を示すブラシレスモータの一部切り欠き断面図。
【図18】本発明の別例を示すブラシレスモータの断面図。
【図19】本発明の別例を示すブラシレスモータの断面図。
【発明を実施するための形態】
【0032】
以下、本発明のモータをブラシレスモータに具体化した一実施の形態を図1〜図16に従って説明する。に従って説明する。
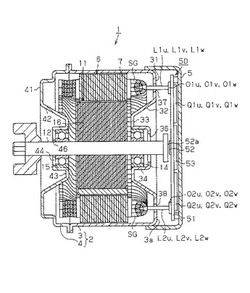
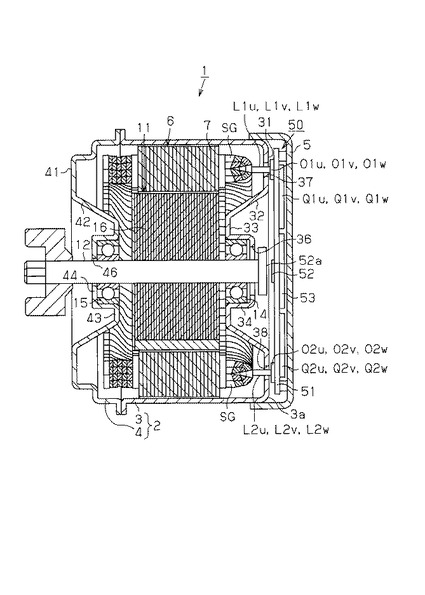
図1に示すように、ブラシレスモータ1のモータケース2は、有底筒状に形成された筒状ハウジング3と、該筒状ハウジング3のフロント側の開口部を閉塞するフロントエンドプレート4とを有している。また、筒状ハウジング3のリア側の外側には、収容ボックス5が取着されている。
【0033】
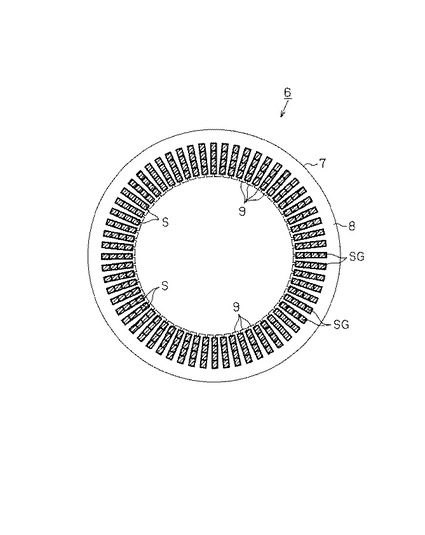
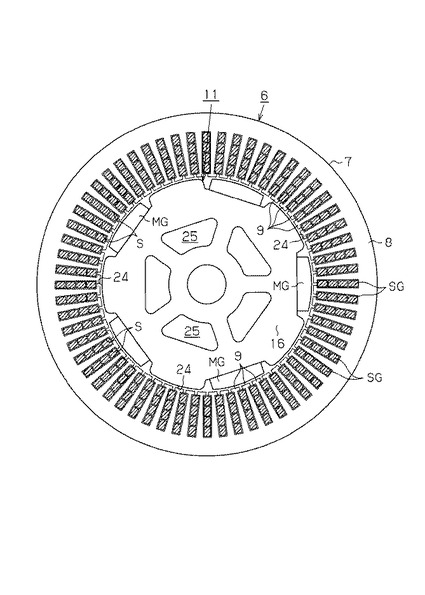
筒状ハウジング3の内周面には電機子としてのステータ6が固定されている。ステータ6は、図2に示すように、コア7を備えている。コア7は、円筒部8と該円筒部8から径方向内側に延びて周方向に複数設けられたティース9とを有する。
【0034】
本実施形態では、ティース9は、60個形成されている。従って、ティース9間に形成されるスロットSは60個形成され、その60個のスロットSは、円筒部8の中心軸線から見て6度の等角度の間隔に配置形成されている。尚、説明の便宜上、個々のスロットSについて個々に特定する必要があるとき、60個のスロットSの周方向に連続した番号であるスロット番号「1」〜「60」を付けて説明する。
【0035】
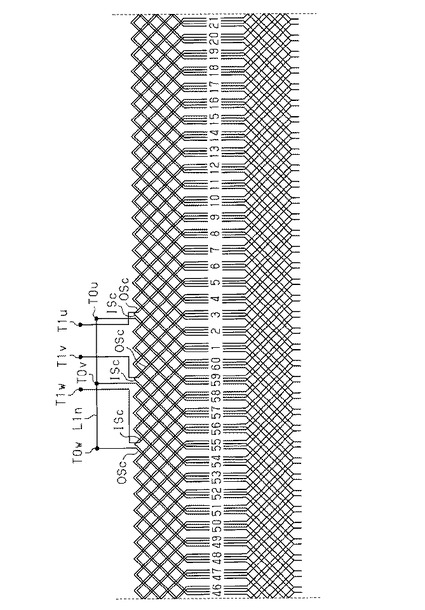
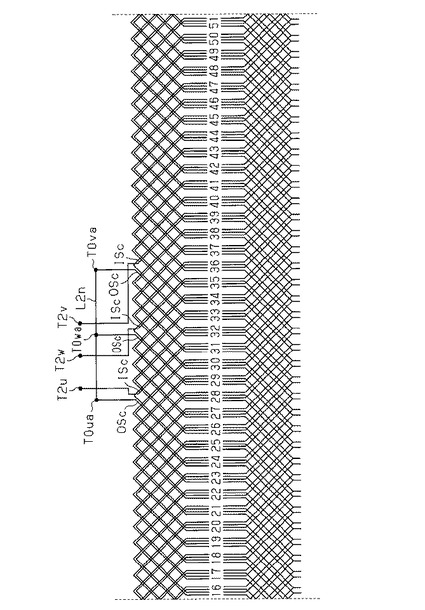
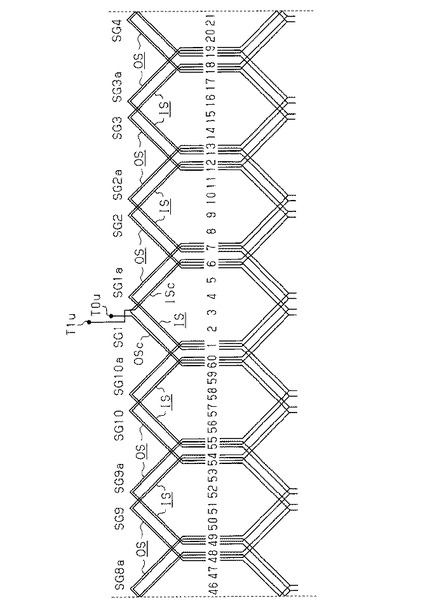
図3及び図4に示すように、各スロットSには、U相、V相、W相のからなる3相巻線が巻回されている。図3及び図4では、周方向にスロットSのスロット番号「1」〜「60」を付している。
【0036】
各スロットSには、軸線方向の一側(リア側)から他側(フロント側)に向かってセグメントSGが挿入される。そして、各セグメントSG同士を所定の規則で接続することによって、3相Y結線のSC巻線を形成している。
【0037】
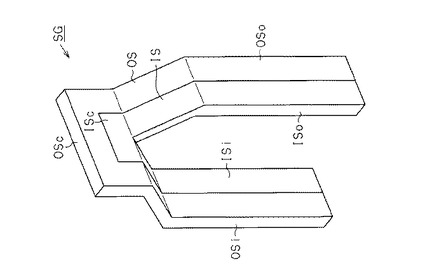
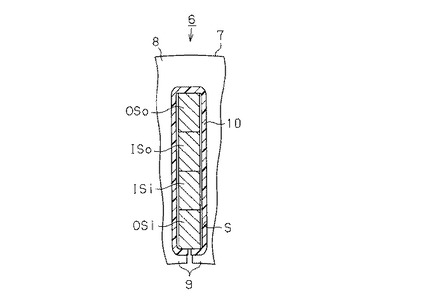
図5に示すように、スロットSに挿入する前のセグメントSGは、波巻用の外側導体OSと重ね巻用の内側導体ISを有している。外側導体OSと内側導体ISは、表面が絶縁材で被膜され、外側導体OSと内側導体ISが電気的に導通しないようになっている。
【0038】
外側導体OSは、第1導体部OSiと第4導体部OSoを有し、第1導体部OSiの基端部と第4導体部OSoの基端部とが連結導体部OScにて連結されている。第1導体部OSiと第4導体部OSoは、互いに連結導体部OScから離間する方向に拡開するように屈曲形成させた後、互いに平行となるように屈曲形成されている。
【0039】
内側導体ISは、外側導体OSの内側に囲まれて配置される。内側導体ISは、第2導体部ISiと第3導体部ISoを有し、第2導体部ISiの基端部と第3導体部ISoの基端部とが連結導体部IScにて連結されている。第2導体部ISiは、連結導体部IScから外側導体OSの第1導体部OSiに沿って屈曲形成されている。第3導体部ISoは、連結導体部IScから外側導体OSの第4導体部OSoに沿って屈曲形成されている。
【0040】
そして、外側導体OSの内側に内側導体ISを配置することによって、スロットSに挿入する前のセグメントSGが形成される。このように形成されたセグメントSGついて、外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiは同一のスロットSに挿入され、外側及び内側導体OS,ISの第4及び第3導体部OSo,ISoは前記第1及び第2導体部OSi,ISiとは異なる隣接する同相のスロットSに挿入される。
【0041】
例えば、外側及び内側導体OS,ISについて、第1及び第2導体部OSi,ISiをスロット番号「60」のスロットSに挿入したとき、第4及び第3導体部OSo,ISoをスロット番号「6」のスロットSに挿入するようになっている。つまり、1つのセグメントSGの第1及び第2導体部OSi,ISiと第4及び第3導体部OSo,ISoは、6スロットピッチの間隔をおいて挿入されることになる。
【0042】
そして、第4及び第3導体部OSo,ISoを挿入したスロット番号「6」のスロットSには、隣のセグメントSGの外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiが挿入される。さらに、その隣のセグメントSGは、自身の外側及び内側導体OS,ISの第4及び第3導体部OSo,ISoをスロットS番号「12」のスロットSに挿入させる。
【0043】
順次同様な方法で、セグメントSGをスロットSに挿入することによって、10個目のセグメントSGの外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiが、スロット番号「60」のスロットSに挿入されて1周する。周回した10個のセグメントSGを互いに接続することによって1相分の巻線が形成される。
【0044】
従って、スロットSが60個あり6相分の巻線が形成されるため、U相、V相、W相の3相巻線が2つ(第1系統3相巻線と第2系統3相巻線)形成されることになる。ここで、第1系統3相巻線と第2系統3相巻線とをそれぞれ特定して説明するときは、第1系統3相巻線の各相をU1相、V1相、W1相とし、第2系統3相巻線の各相をU2相、V2相、W2相という。なお、スロットSの内周面は、インシュレータ10(図9参照)が形成され、セグメントSGとステータ6のコア7との間を電気的に絶縁している。
【0045】
本実施形態では、第1系統3相巻線と第2系統3相巻線の各相の巻線が使用するスロットSが、表1で示すように割り当てられている。
【0046】
【表1】

表1から明らかなように、第1系統3相巻線のU1相は、スロット番号が「60」、「6」、「12」、「18」、「24」、「30」、「36」、「42」、「48」、「5
4」のスロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。
【0047】
そして、第1系統3相巻線のV1相は、第1系統3相巻線のU1相の巻線に対して、2スロットピッチずれた各スロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。また、第1系統3相巻線のW1相は、第1系統3相巻線のU1相の巻線に対して、4スロットピッチずれた各スロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。
【0048】
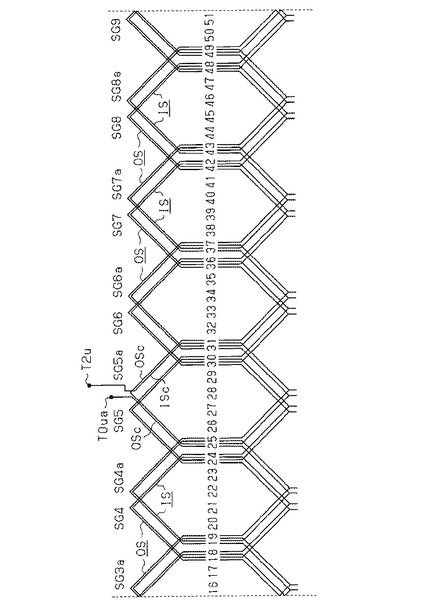
ちなみに、第2系統3相巻線のU2相は、第1系統3相巻線のU1相の巻線に対して、1スロットピッチずれて、スロット番号が「1」、「7」、「13」、「19」、「25」、「31」、「37」、「43」、「49」、「55」のスロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。
【0049】
同様に、第2系統3相巻線のV2相は、第2系統3相巻線のU2相の巻線に対して、2スロットピッチずれた各スロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。また、第2系統3相巻線のW2相は、第2系統3相巻線のU2相の巻線に対して、4スロットピッチずれた各スロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。
【0050】
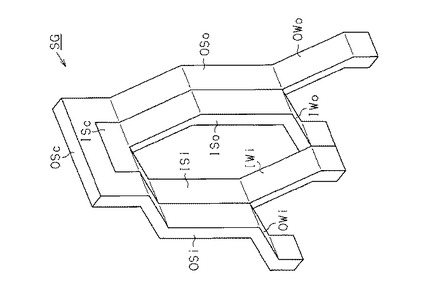
そして、上記の条件で60個全てのスロットSに、図5に示す波巻用の外側導体OSと重ね巻用の内側導体ISからなるセグメントSGを挿通する。続いて、全てのスロットSにセグメントSGについて、図6に示すように、外側導体OS及び内側導体ISを折り曲げ形成して各相の巻線を形成する。
【0051】
波巻用の外側導体OSの折り曲げは、スロットSから突出した部分の第1導体部OSi及び第4導体部OSoを互いに離間する方向に折り曲げる。そして、外側導体OSの第1及び第4導体部OSi,OSoについて、スロットSから突出し互いに離間する方向に折り曲げられた部分を第1及び第4溶接部OWi,OWoという。
【0052】
一方、重ね巻用の内側導体ISの折り曲げは、スロットSから突出した部分の第2導体部ISi及び第3導体部ISoを互いに近づく方向に折り曲げる。そして、内側導体ISの第2及び第3導体部ISi,ISoについて、スロットSから突出し互いに近づく方向に折り曲げられた部分を第2及び第3溶接部IWi,IWoという。
【0053】
(第1系統3相巻線)
次に、第1系統3相巻線について説明する。
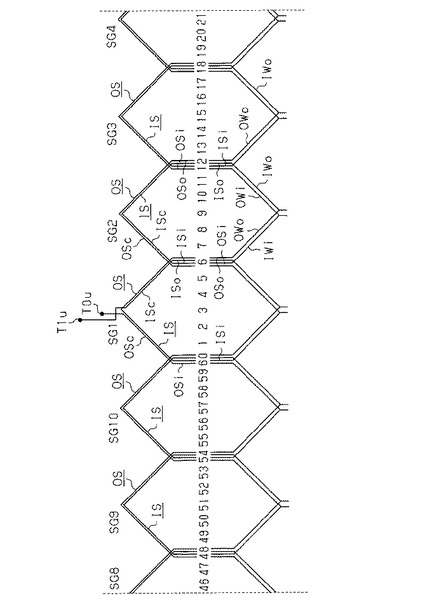
ここで、10個のセグメントSGを使って、第1系統3相巻線の内のU1相の巻線の巻線方法について、図7及び図8に従って説明する。
【0054】
第1系統のU1相の巻線に使用されるスロットSは、表1に示すスロット番号のスロットSが割り当てられ、10個のセグメントSG1〜SG10が使用される。
ここで、1個目のセグメントSG1はスロット番号「60」及び「6」のスロットSに挿入される。2個目のセグメントSG2はスロット番号「6」及び「12」のスロットSに挿入される。3個目のセグメントSG3はスロット番号「12」及び「18」のスロットSに挿入される。4個目のセグメントSG4はスロット番号「18」及び「24」のスロットSに挿入される。5個目のセグメントSG5はスロット番号「24」及び「30」のスロットSに挿入される。
【0055】
さらに、6個目のセグメントSG6はスロット番号「30」及び「36」のスロットSに挿入される。7個目のセグメントSG7はスロット番号「36」及び「42」のスロッ
トSに挿入される。8個目のセグメントSG8はスロット番号「42」及び「48」のスロットSに挿入される。9個目のセグメントSG9はスロット番号「48」及び「54」のスロットSに挿入される。10個目のセグメントSG10はスロット番号「54」及び「60」のスロットSに挿入される。
【0056】
なお、セグメントSG1〜SG10を各スロットSに挿入する際、後続するセグメントが所定のスロットSに挿入し易いように、外側導体OSの連結導体部OSc及び内側導体ISの連結導体部IScを斜めに捻るように折り曲げ形成して挿入している。
【0057】
今、スロット番号「60」及び「6」には、U1相用の1個目のセグメントSG1が挿入されている。これによって、スロット番号「60」のスロットSには、内側導体ISの第2導体部ISiと外側導体OSの第1導体部OSiが配置され、スロット番号「6」のスロットSには、内側導体ISの第3導体部ISoと外側導体OSの第4導体部OSoが配置されている。
【0058】
スロット番号「6」及び「12」には、U1相用の2個目のセグメントSG2が挿入されている。これによって、スロット番号「6」のスロットSには、内側導体ISの第2導体部ISiと外側導体OSの第1導体部OSiが配置され、スロット番号「12」のスロットSには、内側導体ISの第3導体部ISoと外側導体OSの第4導体部OSoが配置されている。
【0059】
このとき、スロット番号「6」のスロットSには、1個目のセグメントSG1の内側及び外側導体IS,OSの第3及び第4導体部ISo,OSoが配置され、2個目のセグメントSG2の外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiが配置される。
【0060】
つまり、図9に示すように、スロットSに、径方向に内側から第1導体部OSi、第2導体部ISi、第3導体部ISo、第4導体部OSoの順に、4層構造(径方向積層構造)となって配置されている。そして、1個目のセグメントSG1の外側導体OS(スロット番号「6」を貫挿した)の第4溶接部OWoと、2個目のセグメントSG2の内側導体IS(スロット番号「12」を貫挿した)の第3溶接部IWoとを溶接する。
【0061】
スロット番号「12」及び「18」には、U1相用の3個目のセグメントSG3が挿入されている。これによって、スロット番号「12」のスロットSには、内側導体ISの第2導体部ISiと外側導体OSの第1導体部OSiが配置され、スロット番号「18」のスロットSには、内側導体ISの第3導体部ISoと外側導体OSの第4導体部OSoが配置されている。
【0062】
このとき、スロット番号「12」のスロットSには、2個目のセグメントSG2の内側及び外側導体IS,OSの第3及び第4導体部ISo,OSoが配置され、3個目のセグメントSG3の外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiが配置される。そして、2個目のセグメントSG2の外側導体OS(スロット番号「12」を貫挿した)の第4溶接部OWoと、3個目のセグメントSG3の内側導体IS(スロット番号「18」を貫挿した)oの第3溶接部IWoとを溶接する。
【0063】
さらにまた、2個目のセグメントSG2の内側導体IS(スロット番号「6」を貫挿した)の第2溶接部IWiと、3個目のセグメントSG3の外側導体OS(スロット番号「12」を貫挿した)の第4溶接部OWoとを溶接する。以後、同様な、4〜10個のセグメントSG4〜SG10について、同様な工程を繰り返すことによって、図7及び図8に示すU1相の巻線が形成される。
【0064】
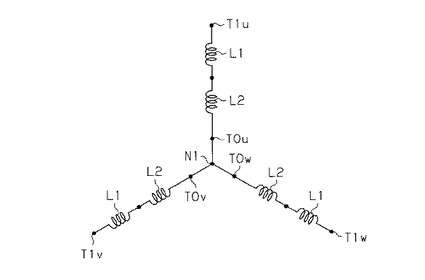
第1系統3相巻線の他のV1相,W1相の巻線もU1相の巻線と同様な方法で巻回される。また、第1系統3相巻線は3相Y結線で構成されている。従って、各相の巻線について中性点N1(図10参照)と接続する中性点端子T0u,T0v,T0w及び電力を受電する電力受電端子T1u,T1v,T1wを決めている。
【0065】
(中性点端子及び電力受電端子の設定)
図7、図3に示すように、本実施形態では、U1相の巻線について、1個目のセグメントSG1の外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0066】
ここで、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0067】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、U1相の中性点端子T0uとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、U1相の電力受電端子T1uとしている。
【0068】
つまり、中性点端子T0uは、スロット番号「60」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T1uは、スロット番号「6」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。
【0069】
従って、電力受電端子T1uは、中性点端子T0uよりスロットS内の径方向において外側に配置される。
また、図3に示すように、V1相の巻線について、スロット番号「56」及び「2」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0070】
同様に、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0071】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、V1相の中性点端子T0vとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、V1相の電力受電端子T1vとしている。
【0072】
つまり、中性点端子T0vは、スロット番号「56」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T1vは、スロット番号「2」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。
【0073】
従って、電力受電端子T1vは、中性点端子T0vよりスロットS内の径方向において外側に配置される。
また、図3に示すように、W1相の巻線について、スロット番号「52」及び「58」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IS
cを分離する。
【0074】
同様に、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0075】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、W1相の中性点端子T0wとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、W1相の電力受電端子T1wとしている。
【0076】
つまり、中性点端子T0wは、スロット番号「52」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T1wは、スロット番号「58」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。
【0077】
従って、電力受電端子T1wは、中性点端子T0wよりスロットS内の径方向において外側に配置される。
これによって、各相の電力受電端子T1u,T1v,T1wは、スロットS内の径方向において3番目に外側の位置にそれぞれ配置され、各相の中性点端子T0u,T0v,T0wは、スロットS内の径方向において最も内側にそれぞれ配置される。しかも、各相の電力受電端子T1u,T1v,T1wは互いに近い位置に配置されている。同様に、各相の中性点端子T0u,T0v,T0wも、各相の電力受電端子T1u,T1v,T1wの内側であって互いに近い位置に配置されている。
【0078】
従って、各相の中性点端子T0u,T0v,T0wを互いに接続する中性線L1nは、各相の電力受電端子T1u,T1v,T1wより内側に配置される。その結果、各相の電力受電端子T1u,T1v,T1wから引き出される各引出線L1u,L1v,L1wは、中性線L1nよりも外側に配置される。
【0079】
そして、各相の中性点端子T0u,T0v,T0wを互いに中性線L1nにて接続し、各相の電力受電端子T1u,T1v,T1wを受電端とすれば、第1系統の3相Y結線の巻線が形成され、図10に示すような電気回路が形成される。なお、図中、「L1」は、電力受電端子T1u,T1v,T1wからそれぞれの巻線が周回し、それぞれ外側導体OSの連結導体部OScの分離端と内側導体ISの連結導体部IScの分離端との接続点までのインダクタンスを示す。また。「L2」は、それぞれその外側導体OSの連結導体部OScの分離端と内側導体ISの連結導体部IScの分離端との接続点から、それぞれの各中性点端子T0u,T0v,T0wまでのインダクタンスを示す。
【0080】
(第2系統3相巻線)
次に、第2系統3相巻線について説明する。
第2系統3相巻線は、第1系統3相巻線と同様に3相Y結線である。そして、第2系統の3相各巻線は、第1系統の対応する3相各巻線と1スロットピッチずれて各スロットSにそれぞれ巻回される。
【0081】
従って、図11、図12に示すように、第2系統のU2相巻線は、第1系統のU1相巻線に対して、1スロットピッチずれて各スロットSにそれぞれ巻回される。
第2系統のU2相の巻線に使用されるスロットSは、表1に示すスロット番号のスロットSが割り当てられ、10個のセグメントSG1a〜SG10aが使用される。
【0082】
ここで、1個目のセグメントSG1aはスロット番号「1」及び「7」のスロットSに挿入される。2個目のセグメントSG2aはスロット番号「7」及び「13」のスロットSに挿入される。3個目のセグメントSG3aはスロット番号「13」及び「19」のスロットSに挿入される。4個目のセグメントSG4aはスロット番号「19」及び「25」のスロットSに挿入される。5個目のセグメントSG5aはスロット番号「25」及び「31」のスロットSに挿入される。
【0083】
さらに、6個目のセグメントSG6aはスロット番号「31」及び「37」のスロットSに挿入される。7個目のセグメントSG7aはスロット番号「37」及び「43」のスロットSに挿入される。8個目のセグメントSG8aはスロット番号「43」及び「49」のスロットSに挿入される。9個目のセグメントSG9aはスロット番号「49」及び「55」のスロットSに挿入される。10個目のセグメントSG10aはスロット番号「55」及び「1」のスロットSに挿入される。
【0084】
そして、第1系統のU1相巻線と同様に、各セグメントSG1a〜SG10aが結線されて第2系統のU2相の巻線が形成される。また、第2系統3相巻線の他のV2相,W2相の巻線もU2相の巻線と同様な方法で巻回される。
【0085】
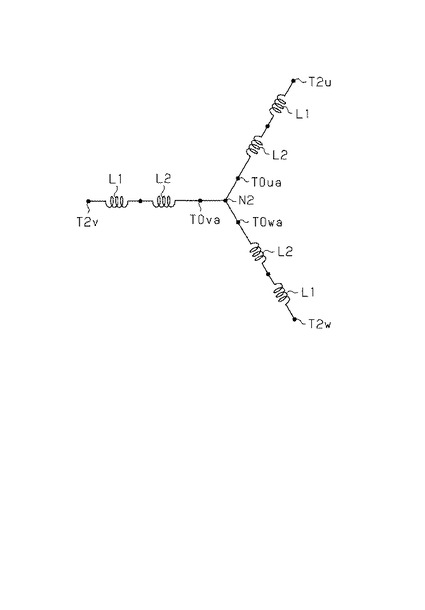
さらに、第2系統3相巻線も同様に3相Y結線で構成されている。従って、各相の巻線について中性点N2(図13参照)と接続する中性点端子T0ua,T0va,T0wa及び電力を受電する電力受電端子T2u,T2v,T2wを決めている。
【0086】
(中性点端子及び電力受電端子の設定)
図3、図4に示すように、本実施形態では、U2相の巻線について、中性点端子T0ua及び電力受電端子T2uは、U1相の中性点端子T0u及び電力受電端子T1uに対して周方向において180度相対向する位置に設けられる。従って、U2相の巻線について、5個目のセグメントSG5aの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0087】
ここで、U1相巻線と同様に、図12に示すように、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0088】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、U2相の中性点端子T0uaとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、U2相の電力受電端子T2uとしている。
【0089】
つまり、中性点端子T0uaは、スロット番号「25」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T2uは、スロット番号「31」のスロットS内の径方向において3番目に外側に配置された内側導体ISの第3導体部ISoから引き出された端子である。
【0090】
従って、電力受電端子T2uは、中性点端子T0uaよりもスロットS内の径方向において外側に配置される。そして、U2相の電力受電端子T2u及び中性点端子T0uaは、それぞれU1相の電力受電端子T1u及び中性点端子T0uに対して、コア7の周方向に180度相対向する位置に配置される。
【0091】
次に、V2相の巻線について、中性点端子T0va及び電力受電端子T2vは、V1相の中性点端子T0v及び電力受電端子T1vに対して周方向において242度相対向する位置に設けられる。従って、図3、図4に示すように、V2相の巻線について、スロット番号「33」及び「39」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0092】
同様に、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0093】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、V2相の中性点端子T0vaとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、V2相の電力受電端子T2vとしている。
【0094】
つまり、中性点端子T0vaは、スロット番号「33」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T2vは、スロット番号「39」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。従って、電力受電端子T2vは、中性点端子T0vaよりスロットS内の径方向において外側に配置される。
【0095】
次に、W2相の巻線について、中性点端子T0wa及び電力受電端子T2wは、W1相の中性点端子T0w及び電力受電端子T1wに対して周方向において138度相対向する位置に設けられる。従って、図3、図4に示すように、W2相の巻線について、スロット番号「29」及び「35」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0096】
同様に、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0097】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、W2相の中性点端子T0waとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、W2相の電力受電端子T2wとしている。
【0098】
つまり、中性点端子T0waは、スロット番号「29」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T2wは、スロット番号「35」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。従って、電力受電端子T2wは、中性点端子T0waよりスロットS内の径方向において外側に配置される。
【0099】
これによって、各相の電力受電端子T2u,T2v,T2wは、スロットS内の径方向において3番目に外側の位置にそれぞれ配置され、各相の中性点端子T0ua,T0va,T0waは、スロットS内の径方向において最も内側にそれぞれ配置される。しかも、各相の電力受電端子T2u,T2v,T2wは互いに近い位置に配置されている。同様に、各相の中性点端子T0ua,T0va,T0waも、各相の電力受電端子T2u,T2v,T2wの内側であって互いに近い位置に配置されている。
【0100】
従って、各相の中性点端子T0ua,T0va,T0waを互いに接続する中性線L2nは、各相の電力受電端子T2u,T2v,T2wより内側に配置される。その結果、各相の電力受電端子T2u,T2v,T2wから引き出される各引出線L2u,L2v,L2wは、中性線L2nより径方向において外側に配置される。
【0101】
そして、各相の中性点端子T0ua,T0va,T0waを互いに接続し、各相の電力受電端子T2u,T2v,T2wを引き出せば、第2系統の3相Y結線の巻線が形成され、図13に示すような電気回路が形成される。なお、図中、「L1」は、電力受電端子T2u,T2v,T2wからそれぞれの巻線が周回し、それぞれ外側導体OSの連結導体部OScの分離端と内側導体ISの連結導体部IScの分離端との接続点までのインダクタンスを示す。また。「L2」は、それぞれその外側導体OSの連結導体部OScの分離端と内側導体ISの連結導体部IScの分離端との接続点から、それぞれの各中性点端子T0ua,T0va,T0waまでのインダクタンスを示す。
【0102】
上記のように第1系統3相巻線と第2系統3相巻線が巻回されたステータ6の内側には、図1に示すように、ロータ11が配設されている。
(ロータ11)
ロータ11は、回転軸12に貫挿固着されている。回転軸12は、本実施形態では非磁性体の金属シャフトであって、筒状ハウジング3のリアカバー壁3a及びフロントエンドプレート4に支持された軸受14,15により回転可能に支持されている。
【0103】
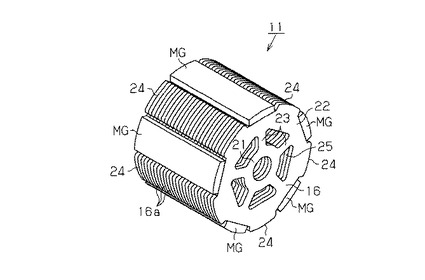
回転軸12に固着されたロータ11は、コンシクエントポール型構造のロータである。
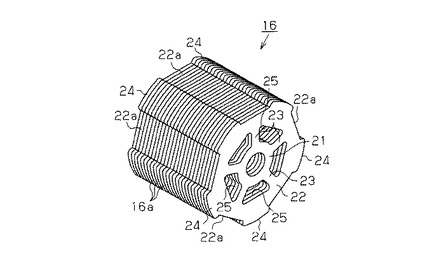
ロータ11は、図14及び図15に示すように、鋼板よりなるロータコア片16aが複数積層されて形成されたロータコア16を有し、回転軸12に固着されている。
【0104】
ロータコア16は、図15に示すように、円筒状に形成され回転軸12に固着される軸固定筒部21と、その軸固定筒部21の外周面を一定の間隔を開けて内包する磁石固定筒部22と、軸固定筒部21と磁石固定筒部22とを一定の間隔に連結保持する橋絡部23を有している。
【0105】
磁石固定筒部22の外周面には、周方向に5個の扇状の凹部22aが等角度に、軸方向に凹設されている。そして、扇状の凹部22aを形成することで、凹部22aと凹部22aの間に5個の突極24が形成される。
【0106】
周方向に形成された5個の凹部22aには、図14に示すように、マグネットMGが固着配置されている。5個のマグネットMGは、ロータコア16に対して、径方向において内側の面がN極に、径方向においてステータ6側の面がS極となるように配置される。
【0107】
その結果、マグネットMGに対し周方向に隣り合う突極24の外側面(ステータ6側)はマグネットMGの外側面と異なる磁極であるN極となる。
なお、本実施形態のロータ11に対するステータ6におけるティース9の個数「Z」は、以下のように設定している。
【0108】
すなわち、ロータ11のマグネットMGの個数(=極数対)を「p」(但し、pは2以上の整数)とし、SC巻線の相数を「m」とすると、
ティース9の個数「Z」は、「Z=2×p×m×n(個)」(但し、「n」は自然数)となるように構成されている。
【0109】
ちなみに、図16に示すように、本実施形態では、この数式に基づいて、ティース9の
個数「Z」は、
Z=2×5(マグネットMGの個数)×3(相数)×2=60個
となる。
【0110】
軸固定筒部21と磁石固定筒部22とを連結保持する橋絡部23は、5個有し、各橋絡部23は軸固定筒部21の外周面から延出形成され、磁石固定筒部22の内周面と連結されている。5個の橋絡部23は、周方向に等間隔に配置され、その等間隔に配置された5個の橋絡部23は軸方向に沿って延出形成されている。
【0111】
また、各橋絡部23はの磁石固定筒部22の内周面との連結は、マグネットMGを嵌合固着した凹部22aと対応した位置に連結される。しかも、各橋絡部23は、径方向に延びる橋絡部23の径方向の中心線がマグネットMGの周方向の幅の中心位置を直交するように連結されている。
【0112】
従って、軸固定筒部21の外側面と磁石固定筒部22の内側面との間に形成された空間は、周方向に配置された5個の橋絡部23にて5個に分割され、5個の軸方向に貫通した空隙25が形成される。
【0113】
空隙25は、積層鋼板によりなるロータコア材より比重及び磁性が小さいことから、ロータコア16は、この空隙25が形成されることによって軽量となり、モータ全体の重量を軽量化することができる。
【0114】
(リアカバー壁3a)
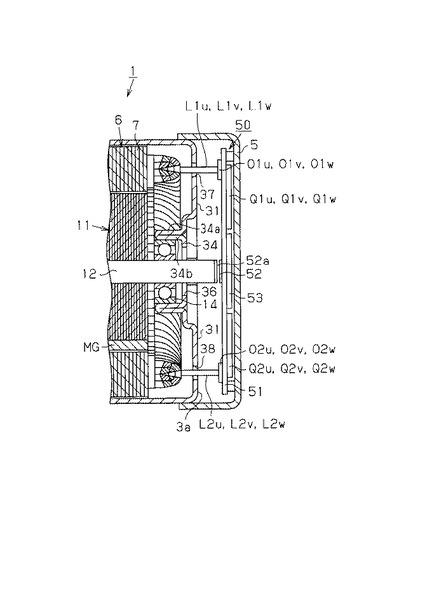
回転軸12を回転可能に支持するリア側の軸受14は、筒状ハウジング3のリアカバー壁3aに支持されている。その筒状ハウジング3のリアカバー壁3aは、図1に示すように、その外周縁から平坦部31、振動吸収部32、振動受け部33、軸受収容部34が形成されている。
【0115】
平坦部31は、リアカバー壁3aの外周縁から径方向内側に向かって一定の幅屈曲形成された環状の平板部であって、その内周端がステータ6の径方向内周端より若干内側となる径方向位置まで延出形成されている。
【0116】
振動吸収部32は、環状の平坦部31の内側内周縁から縮径しながらロータ11側に向かって所定の位置まで延出形成された円錐筒形状の筒部であって、そのロータ11側に縮径して延びた先端円周縁がロータ11の軸線方向リア側の側面に近接する位置まで延出形成されている。
【0117】
振動受け部33は、振動吸収部32の先端内周縁から径方向内側に向かって一定の幅屈曲形成された環状の平板部であって、回転軸12に取着したリア側の軸受14の外周位置と一致する径方向側まで延出形成されている。
【0118】
軸受収容部34は、振動受け部33の内側内周縁から軸線方向リア側に向かって膨出形成した円筒部であって、そのリア側の外側円筒面が前記平坦部31のリア側外側面よりもリア側に突出しないように形成されている。すなわち、軸受収容部34は、振動吸収部32と振動受け部33にて形成されたロータ11側に凹設してなる椀状の凹部の中央部からリア側に突出しない。軸受収容部34の底面には貫通孔36が形成され、その貫通孔36から回転軸12の後端がリアカバー壁3aから突出するようになっている。
【0119】
(フロントエンドプレート4)
回転軸12を回転可能に支持するフロント側の軸受15は、フロントエンドプレート4
に支持されている。フロントエンドプレート4は、その外周縁から平坦部41、振動吸収部42、振動受け部43、軸受収容部44が形成されている。
【0120】
平坦部41は、フロントエンドプレート4の外周縁から径方向内側に向かって一定の幅屈曲形成された環状の平板部であって、その内周端がステータ6の径方向内周端より若干内側となる径方向位置まで延出形成されている。
【0121】
振動吸収部42は、環状の平坦部41の内側内周縁から縮径しながらロータ11側に向かって所定の位置まで延出形成された円錐筒形状の筒部であって、そのロータ11側に縮径して延びた先端円周縁がロータ11の軸線方向フロント側の側面に近接する位置まで延出形成されている。
【0122】
振動受け部43は、振動吸収部42の先端内周縁から径方向内側に向かって一定の幅屈曲形成された環状の平板部であって、回転軸12に取着したフロント側の軸受15の外周位置と一致する径方向側まで延出形成されている。
【0123】
軸受収容部44は、振動受け部43の内側内周縁から軸線方向フロント側に向かって膨出形成した円筒部であって、そのフロント側の外側円筒面が前記平坦部41のフロント側外側面よりもフロント側に突出しないように形成されている。すなわち、軸受収容部44は、振動吸収部42と振動受け部43にて形成されたロータ11側に凹設してなる椀状の凹部の中央部からリア側に突出しない。軸受収容部44の底面には貫通孔46が形成され、その貫通孔46から回転軸12の先端がフロントエンドプレート4から突出するようになっている。
【0124】
なお、本実施形態のブラシレスモータ1は、電動パワーステアリング装置等に用いられるものであって、前記ロータ11の回転軸12が、図示しない減速機に連結され、該減速機を介して被駆動部としての図示しないステアリングシャフト等の相手シャフトに連結され、同ステアリングシャフト等の相手シャフトを駆動するものである。
【0125】
筒状ハウジング3のリア側外側に固設した収容ボックス5内には、駆動装置50が収納されている。駆動装置50の回路基板51は、ロータ11の回転制御するための回転センサ52、ECU(電子制御ユニット)53、第1スイッチングトランジスタQ1u,Q1v,Q1w及び第2スイッチングトランジスタQ2u,Q2v,Q2w等の各種の回路素子が実装されている。
【0126】
回転センサ52は、リアカバー壁3aの軸受収容部34の貫通孔36から軸線方向に突出した回転軸12に相対向するように回路基板51に実装されている。回転センサ52は、本実施形態ではMRセンサ等の磁気センサからなり、回転軸12の軸端面に固着した同回転軸12と一体回転する検出用マグネット52aの回転角を検出する。
【0127】
ECU(電子制御ユニット)53は、マイクロコンピュータを有している。ECU53は、回転センサ52からの検出信号に基づいて、その時々のブラシレスモータ1の回転角度、回転速度等を検出する。そして、ECU53は、第1系統3相巻線及び第2系統3相巻線の各相へ電力供給タイミング演算する。
【0128】
第1スイッチングトランジスタQ1u,Q1v,Q1wは、例えば、パワーMOSトランジスタからなり、ECU53の制御信号に基づいて、オンオフ制御されるようになっている。第1スイッチングトランジスタQ1u,Q1v,Q1wは、所定のタイミングでオンオフ制御されることによって、第1系統3相巻線の各相に電力をそれぞれ供給制御する。これによって、第1系統3相巻線による回転磁界がステータ6に生成される。
【0129】
回路基板51に実装された第1スイッチングトランジスタQ1u,Q1v,Q1wは、軸線方向から見て、第1系統3相巻線に形成した各相の電力受電端子T1u,T1v,T1wと相対向する側に実装されている。そして、その回路基板51の第1スイッチングトランジスタQ1u,Q1v,Q1wとそれぞれ接続され、軸線方向から見て電力受電端子T1u,T1v,T1wと相対向する前記回路基板51の径方向外周側の位置には、各相に電力を供給する出力端子O1u,O1v,O1wがそれぞれ形成されている。
【0130】
従って、各相の電力受電端子T1u,T1v,T1wから引き出される各引出線L1u,L1v,L1wは、リアカバー壁3aの平坦部31に形成した第1挿通穴37を貫通して各相の電力受電端子T1u,T1v,T1wと各相に出力端子O1u,O1v,O1wとを軸線方向に最短距離でそれぞれ接続する。
【0131】
第2スイッチングトランジスタQ2u,Q2v,Q2wは、例えば、パワーMOSトランジスタからなり、ECU53の制御信号に基づいて、オンオフ制御されるようになっている。第2スイッチングトランジスタQ2u,Q2v,Q2wは、所定のタイミングでオンオフ制御されることによって、第2系統3相巻線の各相に電力をそれぞれ供給制御する。これによって、第2系統3相巻線による回転磁界がステータ6に生成される。
【0132】
回路基板51に実装された第2スイッチングトランジスタQ2u,Q2v,Q2wは、軸線方向から見て、第2系統3相巻線に形成した各相の電力受電端子T2u,T2v,T2wと相対向する側に実装されている。そして、その回路基板51の第1スイッチングトランジスタQ1u,Q1v,Q1wとそれぞれ接続され、軸線方向から見て電力受電端子T2u,T2v,T2wと相対向する位置には、各相に電力を供給する出力端子O2u,O2v,O2wがそれぞれ形成されている。
【0133】
従って、各相の電力受電端子T2u,T2v,T2wから引き出される各引出線L2u,L2v,L2wは、リアカバー壁3aの平坦部31に形成した第2挿通穴38を貫通して各相の電力受電端子T2u,T2v,T2wと各相に出力端子O2u,O2v,O2wとを軸線方向に最短距離でそれぞれ接続する。
【0134】
次に、上記実施形態の作用を以下に記載する。
回転時において、コンシクエントポール型のロータ11の磁気的アンバランスに基づく径方向の振動は、回転軸12を介してリア側の軸受14及びフロント側の軸受15に伝わる。本実施形態では、磁極対数が奇数倍の「5」であるため、大きな振動が生じる。この軸受14,15に伝わった径方向の振動は、それぞれ平坦部31よりロータ11側に位置する軸受収容部34,44に伝わって、振動受け部33,43を介して振動吸収部32,42に伝達される。
【0135】
この時、振動吸収部32,42は、平坦部31,41側の基端部を支点とし、振動受け部33,43側の先端部を作用点として、撓んで振動を吸収する。これによって、回転軸12の径方向の振動は、平坦部31,41に伝達されず、筒状ハウジング3の径方向の外周面に振動が伝わらない。その結果、回転が静かなブラシレスモータ1となり、静かな回転が必要とされる電動パワーステアリング装置に使用されるブラシレスモータ1としては最適となる。
【0136】
また、軸受14,15を支持する軸受収容部34,44を平坦部31,41よりロータ11側に形成したことにより、従来のように、軸受14がリア側に突出し、軸受15がフロント側に突出しないことから、その分だけ軸線方向の長さを小さくなる。
【0137】
また、ブラシレスモータ1のロータ11はコンシクエントポール型のロータにしたことから、ロータ11に取着するマグネットMGを半減させている。また、ステータ6はSC巻線を施しスロットS内の巻線の占有率が向上させている。しかも、ティース9の個数「Z」は、「Z=2×p×m×n(個)=60個」となるように設け、ロータ11の磁極当たりのスロットS数が多くコギングトルクの低減が図られている。
【0138】
次に、上記実施形態の効果を以下に記載する。
(1)本実施形態によれば、リアカバー壁3a及びフロントエンドプレート4にそれぞれ設けた軸受14,15を支持する軸受収容部34,44は、平坦部31,41より突出することなくロータ11側に形成した。
【0139】
従って、軸受14がリア側に、また、軸受15がフロント側にそれぞれ突出しないことから、その分だけ軸線方向の長さを小さくできる。
また、平坦部31,41側の内周端部を支点として、軸受収容部34,44を撓ませて、回転軸12の径方向の振動を吸収できる。
【0140】
(2)本実施形態によれば、リアカバー壁3a及びフロントエンドプレート4にそれぞれ振動吸収部32,42を設けた。従って、これら振動吸収部32,42によって、回転軸12に発生する径方向の振動は、より効果的に吸収される。その結果、回転が静かなブラシレスモータ1にすることができ、静かな回転が必要とされる電動パワーステアリング装置に使用されるブラシレスモータ1としては最適となる。
【0141】
しかも、振動吸収部32,42は、円錐筒形状であって、振動吸収部32,42と軸受収容部34,44とを、径方向においてそれぞれ振動受け部33,43を介して離間させるように構成した。従って、振動吸収部32,42がより撓みやすく、径方向の振動をより効率良く吸収することができる。
【0142】
(3)本実施形態によれば、ロータ11に空隙25を設けた。つまり、空隙25は、積層鋼板によりなるロータコア材より比重及び磁性が小さいことから、ロータコア16を軽量にし、ブラシレスモータ1全体の重量を軽量化することができる。
【0143】
(4)本実施形態によれば、軸受収容部34,44は、SC巻線の各セグメントSGのステータ6から軸線方向に突出した部位と軸方向で重なる位置に設けた。
従って、軸受収容部34,44は、ステータ6から軸線方向に突出した部位よりさらに軸線方向に突出しないことから、ブラシレスモータの軸線方向の全長を短くできる。
【0144】
(5)本実施形態によれば、軸受収容部34,44は、ロータ11側の開口部の先端が径方向においてマグネットMGと回転軸12との間に位置するように形成した。
従って、回転軸12に磁束が漏れることを抑制することができる。
【0145】
(6)本実施形態によれば、回転軸12のリア側先端面には、回転軸12の回転を検出する検出用マグネット52aを取着した。従って、回転軸12と一体回転する検出用マグネット52aの回転角を検出することによって、その時々の回転軸12の回転角度、回転速度等を検出することができる。その結果、巻線の各相へ電力供給タイミングを設定できる。
【0146】
上記実施の形態は、以下のように変更してもよい。
・上記実施形態では、振動吸収部32,42は、円錐筒形状であって、振動吸収部32,42と軸受収容部34,44とを、径方向において離間させた。これを、例えば、図17に示すように、振動吸収部32と振動受け部33を省略して実施してもよい。詳述すると、図17において、リアカバー壁3aにおいて、環状の平坦部31の内側内周縁から折り曲げ形成して軸受収容部34の外周壁34aをロータ11の軸線方向リア側の側面に近接する位置まで延出形成する。そして、その外周壁34aの先端内周縁からリア側に折り曲げ形成して軸受収容部34の内周壁34bを軸線方向リア側に向かって形成する。
【0147】
そして、外周壁34aと内周壁34bからなる2重構造の軸受収容部34にロータ側開口から軸受14を収容固着する。
この場合でも、2重構造の軸受収容部34は、外周壁34aと平坦部31の連結部分を支点として撓むことができ、回転軸12からの振動を吸収することができる。
【0148】
なお、図17に示す軸受収容部34は、外周壁34aと内周壁34bとを密接させた2重構造であったが、外周壁34aと内周壁34bとを、上記実施形態のように、振動受け部33を介在して離間させて実施させてもよい。
【0149】
・上記実施形態では、リアカバー壁3aとフロントエンドプレート4の両方に、振動吸収部32,42を設けたが、いずれか一方にもみ設けて実施してもよい。例えば、リアカバー壁3aだけに振動吸収部32を設けたり、フロントエンドプレート4だけに振動吸収部42を設けたりして実施してもよい。
【0150】
・上記実施形態では、スロットSの数を60個にしたが、これに限定されるものではなく、例えば、スロットSの数を45個にする等、適宜変更して実施してもよい。
・上記実施形態では、ロータ11に空隙25を形成したが、空隙25を形成しないロータに応用してもよい。
【0151】
・上記実施の形態では、マグネットMGの数は5個であったが、これに限定されるものではなく、2個、3個、または、それ以上であってもよい。勿論、ステータのスロットSの数を適宜変更して実施してもよい。
【0152】
・上記実施形態では、ステータ6はセグメントSGを挿入したSC巻線で実施したが、銅線等の巻線を巻回してなるステータに応用してもよい。
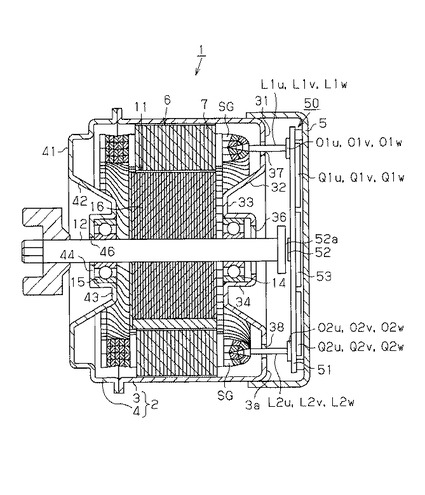
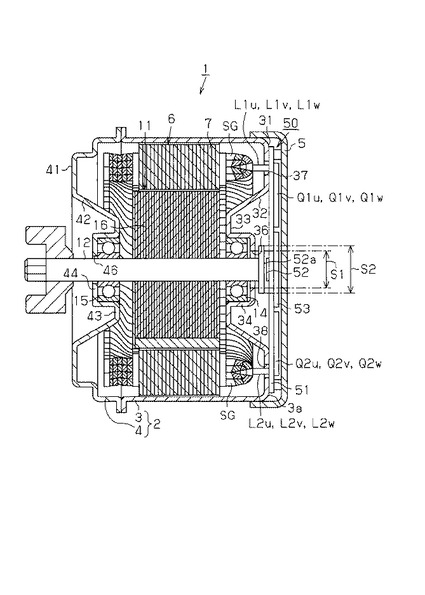
・上記実施形態では、検出用マグネット52aの位置について特に言及していないが、図18や図19に示すように、検出用マグネット52aを前記平坦部31(筒状ハウジング3の底面)よりも軸方向のフロント側となる位置に設けることが好ましい。このような構成とすることで、回転軸12のリア側の端部を平坦部31よりもリア側に突出することがないため、モータ1の軸方向の全長を短くできる。
【0153】
・上記実施形態では、特に言及していないが、例えば図19に示すように、回転センサ52を配置する回路基板51を平坦部31と軸方向において当接させる構成とすることが望ましい。このような構成とすることで、平坦部31と回路基板51とを離間させた構成(図1参照)と比較して、モータ1の軸方向の全長を短くできる。また、回路基板51上の回転センサ52やECU53等の各種回路素子によって発熱しても、平坦部31との当接によって筒状ハウジング3(モータケース2)から放熱することが可能となる。
【0154】
・上記実施形態では、特に言及していないが、例えば図19に示すように、貫通孔36の孔径S1は、検出用マグネット52aの直径S2よりも小さいことが望ましい。このような構成とすることで、貫通孔36を回転軸12に近接されて、ステータ6のマグネットMGから回転軸12側に漏れた磁束が貫通孔36の端面から筒状ハウジング3を通ってマグネットMGに戻るため、検出用マグネット52aが固定された部位が磁化されることが抑制される。これにより、磁化された回転軸12の影響によって検出用マグネット52aの磁界が歪むことが抑制できるようになっている。
【0155】
・上記実施形態では、モータとしてブラシレスモータ1に具体化したが、これをブラシ付きモータに具体化してもよい。
・上記実施形態では、コンシクエントポール型のロータ11は、所謂、SPM(Surface Permanent Magnet Motor)型であったが、これを、IPM(Interior Permanent Magnet Motor)型のロータに応用してもよい。
【0156】
・上記実施形態では、ブラシレスモータ1は、電動パワーステアリング装置(EPS)に用いられるEPS用モータであったが、それ以外のパワーウィンド用モータ、ワイパー駆動用モータ等、その他のモータに応用してもよい。
【符号の説明】
【0157】
1…ブラシレスモータ(モータ)、2…モータケース、3…筒状ハウジング、3a…リアカバー壁(リア側壁面)、4…フロントエンドプレート(フロント側壁面)、5…収容ボックス、6…ステータ、7…コア、8…円筒部、9…ティース、10…インシュレータ、11…ロータ、12…回転軸、14,15…軸受、16…ロータコア、21…軸固定筒部、22…磁石固定筒部、22a…凹部、23…橋絡部、24…突極、25…空隙、31,41…平坦部、32,42…振動吸収部、33,43…振動受け部、34,44…軸受収容部、36…貫通孔、37…第1挿通穴、38…第2挿通穴、46…貫通孔、50…駆
動装置、51…回路基板、52…回転センサ、52a…検出用マグネット、53…ECU(電子制御ユニット)、S…スロット、S1…孔径、S2…直径、IS…内側導体、MG…マグネット、N1,N2…中性点、OS…外側導体、SG…セグメント、ISc,OSc…連結導体部、ISi…第2導体部、ISo…第3導体部、IWi…第2溶接部、IWo…第3溶接部、L1n,L2n…中性線、L1u,L1v,L1w,L2u,L2v,L2w…引出線、O1u,O1v,O1w,O2u,O2v,O2w…出力端子、OSi…第1導体部、OSo…第4導体部、OWi…第1溶接部、OWo…第4溶接部、Q1u,Q1v,Q1w…第1スイッチングトランジスタ、Q2u,Q2v,Q2w…第2スイッチングトランジスタ、SG1〜SG10,SG1a〜SG10a…セグメント、T0u,T0v,T0w,T0ua,T0va,T0wa…中性点端子、T1u,T1v,T1w,T2u,T2v,T2w…電力受電端子。
【技術分野】
【0001】
本発明は、モータに関するものである。
【背景技術】
【0002】
従来、モータ、例えば、ブラシレスモータにおいて、ロータに取着する磁石を半減させてなるコンシクエントポール型のモータが提案されている(例えば、特許文献1)。コンシクエントポール型のモータは、ロータに取着する磁石を半減できるため低コスト化を図る上では優れている。
【0003】
また、ブラシレスモータにおいて、ステータにロータの磁極当たり多数の周方向スロットが形成され、その多数の周方向スロットにSC巻線を施したモータが種々提案されている(例えば、特許文献2)。このモータは、ロータの磁極当たりのスロット数が多くコギングトルクの低減を図ることができるとともに、スロット内の巻線の占有率が向上し、出力当たりのモータの体格が小さくなることが知られている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−327139号公報
【特許文献2】特開平11−98788号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記コンシクエントポール型のモータは、ロータの周方向に交互に形成される異なる磁極(N極とS極)の磁気的バランスがアンバランスになることから、コギングトルクが大きくなるとともに、径方向の振動が大きくなる問題があった。特に、磁極対数が奇数のロータの場合には、径方向の振動が特に大きくなる傾向にあった。
【0006】
また、SC巻線を施したモータおいては、SC巻線が各スロットにU字状のセグメントを軸方向から挿入し、反対側を後工程において溶接等で接続して周方向に連続巻線を形成する巻線である。そのため、ステータの軸線方向外側にその溶接部分のスペースを確保しなければならない問題があった。その結果、ステータの軸線方向の全長が長くなり、ひいては、モータの体格が大きくなる問題があった。
【0007】
そこで、ロータをコンシクエントポール型のロータとSC巻線を施したステータとを共に利用したモータが考えられる。
このモータにおいては、コギングトルクの低減が図れるとともに安価なモータが提供できる。しかしながら、コンシクエントポール型ロータの磁気的アンバランスに基づく径方向の振動と、SC巻線を施したステータに基づくステータの軸線方向の全長が長くなることによるモータの体格が大きくなる問題が依然解消されてない。
【0008】
本発明は上記問題点を解消するためになされたものであって、その目的は、径方向の振動を低減するとともに、モータの体格を小さくすることができるモータを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決するために、請求項1に記載の発明は、2×p極(但し、pは極数対)の磁極が周方向に交互に配置されたコンシクエントポール型のロータと、前記ロータを内包し、前記ロータの1磁極当たり複数個設けられる、前記ロータと径方向に対向して2×p×m×n個(但し、mはステータ巻線の相数、nは自然数)のティース及びスロットを有するコアと前記スロットに巻回された多相の巻線とを有するステータとを備え、前記ロータ及び前記ステータが筒状モータケースに内包されてなるモータであって、筒状モータケースの軸方向のリア側壁面またはフロント側壁面の少なくともいずれか一方の壁面は、前記壁面の外周縁から径方向内側に向かって前記ステータの径方向内周端より内側となる径方向位置まで延出形成した平坦部と、前記壁面の中央部であって前記平坦部より前記ロータ側に開口部を有し、前記ロータに固着した回転軸を回転可能に支持する軸受を前記開口部から収容し固定する軸受収容部とを備えた。
【0010】
請求項1に記載の発明によれば、軸受収容部の開口部が平坦部よりロータ側に位置するため、回転軸が径方向に振動しその振動によって軸受及び軸受収容部が径方向に振動しても、軸受収容部が撓み、その振動を吸収し平坦部への振動を低減し、筒状モータケースの径方向の外周面への振動が抑制され、モータを静かに回転させることができる。
【0011】
また、軸受収容部を平坦部よりロータ側に形成したので、その分だけ軸線方向の長さを小さくでき、モータの軸線方向の全長を短くできる。
請求項2に記載の発明は、請求項1に記載のモータにおいて、前記軸受収容部は、前記ロータ側の開口部の先端が径方向において前記磁極と前記回転軸との間に位置するように形成されている。
【0012】
請求項2に記載の発明によれば、回転軸に磁束が漏れることを抑制することができる。
請求項3に記載の発明は、請求項1又は2に記載のモータにおいて、前記回転軸のリア側先端面には、前記回転軸の回転を検出する検出用マグネットが取着されている。
【0013】
請求項3に記載の発明によれば、回転軸と一体回転する検出用マグネットの回転角を検出することによって、その時々の回転軸の回転角度、回転速度等を検出することができる。その結果、巻線の各相へ電力供給タイミングを設定できる。
【0014】
請求項4に記載の発明は、請求項1〜3のいずれか1に記載のモータにおいて、前記スロットに巻回された巻線は、SC巻線である。
請求項4に記載の発明によれば、SC巻線にしたことにより、スロット内の巻線の占有率が向上し、出力当たりのモータの体格を小さくすることができる。
【0015】
請求項5に記載の発明は、前記請求項1〜4にいずれか1に記載のモータにおいて、前記平坦部と軸受収容部の間には、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円筒形状の振動吸収部と、前記ロータ側に延びた前記振動吸収部の先端円周縁と前記軸受収容部のロータ側の開口部とを連結する環状平板形状の振動受け部とが設けられている。
【0016】
請求項5に記載の発明によれば、回転軸が径方向に振動しその振動によって軸受及び軸受収容部が径方向に振動しても、さらに振動吸収部がその振動を吸収し平坦部への振動を低減し、筒状モータケースの径方向の外周面への振動が抑制され、モータを静かに回転させることができる。
【0017】
請求項6に記載の発明は、前記請求項5に記載のモータにおいて、前記振動吸収部は、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円錐筒形状の筒体であって、そのロータ側に縮径して延びた先端円周縁に前記振動受け部の外周端が連結される。
【0018】
請求項6に記載の発明によれば、振動吸収部を円錐筒形状にしたことにより、回転軸が
径方向に振動しその振動によって軸受及び軸受収容部が径方向に振動しても、さらにその振動を吸収する。
【0019】
請求項7に記載の発明は、前記請求項4〜6のいずれか1に記載のモータにおいて、前記軸受収容部は、前記SC巻線の前記ステータから軸線方向に突出した部位と軸方向で重なる位置に設けられている。
【0020】
請求項7に記載の発明によれば、軸受収容部は、前記SC巻線のステータから軸線方向に突出した部位と軸方向で重なる位置に設けられている。そのため、軸受収容部は、ステータから軸線方向に突出した部位よりさらに軸線方向に突出しないことから、モータの軸線方向の全長を短くできる。
【0021】
請求項8に記載の発明は、前記請求項1〜7のいずれか1に記載のモータにおいて、前記コンシクエントポール型のロータの極数対は、奇数倍である。
請求項8に記載の発明によれば、磁気アンバランスが大きく回転中に径方向の振動が大きい極数対が奇数倍コンシクエントポール型のロータであっても、その大きな径方向の振動を低減させることができる。
【0022】
請求項9に記載の発明は、前記請求項1〜8のいずれか1に記載のモータにおいて、前記コンシクエントポール型のロータは、ロータコア材より比重及び磁性が小さい小磁性軽量部分を形成した。
【0023】
請求項9に記載の発明によれば、ロータを軽量にし、モータ全体の重量を軽量化することができる。
請求項10に記載の発明は、請求項1〜9のいずれか1に記載のモータにおいて、前記回転軸のリア側先端面には、前記回転軸の回転を検出する検出用マグネットが取着され、前記平坦部と軸受収容部の間には、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円筒形状の振動吸収部を備え、前記検出用マグネットは、前記平坦部より前記軸方向のフロント側となる位置に設けられた。
【0024】
請求項10に記載の発明によれば、回転軸のリア側の端面(先端面)に取着される検出用マグネットがモータケースの軸方向の一方側の端部である平坦部よりも他方側とされて一方側の端部から突出することがないため、モータの軸方向の全長を短くできる。
【0025】
請求項11に記載の発明は、請求項10に記載のモータにおいて、前記検出用マグネットを検出する検出センサが配置される回路基板を備え、前記回路基板は前記平坦部と軸方向で当接配置される。
【0026】
請求項11に記載の発明によれば、検出用マグネットを検出する検出センサが配置される回路基板が平坦部と軸方向で当接配置されるため、平坦部と回路基板とを離間した場合と比較して軸方向の距離を抑えることができ、モータの軸方向の全長を短くできる。
【0027】
請求項12に記載の発明は、請求項10又は11に記載のモータにおいて、前記筒状モータケースの軸方向のリア側壁面に前記回転軸を挿通するための貫通孔が形成され、前記貫通孔の孔径は、前記検出用マグネットよりも小さく形成される。
【0028】
請求項12に記載の発明によれば、貫通孔を小さくして回転軸に近接させることができ、ロータを構成するマグネットから回転軸に磁束が漏れたとしても貫通孔(モータケース)及びステータを介してロータを構成するマグネットにその磁束が戻る。これにより、検出用マグネットへの影響を小さくすることができる。
【0029】
請求項13に記載の発明は、請求項1〜12のいずれか1に記載のモータを電動パワーステアリングモータに用いた。
請求項13に記載の発明によれば、電動パワーステアリングモータは、軸線方向の全長を小さくすることができ、回転中においては径方向の振動が抑制され、静かに回転する。
【発明の効果】
【0030】
本発明によれば、径方向の振動を低減するとともに、モータの体格を小さくすることができる。
【図面の簡単な説明】
【0031】
【図1】本実施形態のブラシレスモータの断面図。
【図2】本実施形態のステータの断面図。
【図3】本実施形態の3相巻線の一部展開図。
【図4】同じく3相巻線の一部展開図。
【図5】スロット挿入前のセグメントの斜視図。
【図6】スロット挿入後のセグメントの斜視図。
【図7】第1系統のU1相の巻線の一部展開図。
【図8】同じく第1系統のU1相の巻線の一部展開図。
【図9】セグメントの各導体部がスロットに挿入された状態を示す断面図。
【図10】第1系統3相巻線の電気回路図。
【図11】第2系統のU2相の巻線の一部展開図。
【図12】同じく第2系統のU2相の巻線の一部展開図。
【図13】第2系統3相巻線の電気回路図。
【図14】コンシクエントポール型のロータを説明するための斜視図。
【図15】コンシクエントポール型のロータコアを説明するための斜視図。
【図16】ステータとロータを説明するための軸方向からみた正面図。
【図17】本発明の別例を示すブラシレスモータの一部切り欠き断面図。
【図18】本発明の別例を示すブラシレスモータの断面図。
【図19】本発明の別例を示すブラシレスモータの断面図。
【発明を実施するための形態】
【0032】
以下、本発明のモータをブラシレスモータに具体化した一実施の形態を図1〜図16に従って説明する。に従って説明する。
図1に示すように、ブラシレスモータ1のモータケース2は、有底筒状に形成された筒状ハウジング3と、該筒状ハウジング3のフロント側の開口部を閉塞するフロントエンドプレート4とを有している。また、筒状ハウジング3のリア側の外側には、収容ボックス5が取着されている。
【0033】
筒状ハウジング3の内周面には電機子としてのステータ6が固定されている。ステータ6は、図2に示すように、コア7を備えている。コア7は、円筒部8と該円筒部8から径方向内側に延びて周方向に複数設けられたティース9とを有する。
【0034】
本実施形態では、ティース9は、60個形成されている。従って、ティース9間に形成されるスロットSは60個形成され、その60個のスロットSは、円筒部8の中心軸線から見て6度の等角度の間隔に配置形成されている。尚、説明の便宜上、個々のスロットSについて個々に特定する必要があるとき、60個のスロットSの周方向に連続した番号であるスロット番号「1」〜「60」を付けて説明する。
【0035】
図3及び図4に示すように、各スロットSには、U相、V相、W相のからなる3相巻線が巻回されている。図3及び図4では、周方向にスロットSのスロット番号「1」〜「60」を付している。
【0036】
各スロットSには、軸線方向の一側(リア側)から他側(フロント側)に向かってセグメントSGが挿入される。そして、各セグメントSG同士を所定の規則で接続することによって、3相Y結線のSC巻線を形成している。
【0037】
図5に示すように、スロットSに挿入する前のセグメントSGは、波巻用の外側導体OSと重ね巻用の内側導体ISを有している。外側導体OSと内側導体ISは、表面が絶縁材で被膜され、外側導体OSと内側導体ISが電気的に導通しないようになっている。
【0038】
外側導体OSは、第1導体部OSiと第4導体部OSoを有し、第1導体部OSiの基端部と第4導体部OSoの基端部とが連結導体部OScにて連結されている。第1導体部OSiと第4導体部OSoは、互いに連結導体部OScから離間する方向に拡開するように屈曲形成させた後、互いに平行となるように屈曲形成されている。
【0039】
内側導体ISは、外側導体OSの内側に囲まれて配置される。内側導体ISは、第2導体部ISiと第3導体部ISoを有し、第2導体部ISiの基端部と第3導体部ISoの基端部とが連結導体部IScにて連結されている。第2導体部ISiは、連結導体部IScから外側導体OSの第1導体部OSiに沿って屈曲形成されている。第3導体部ISoは、連結導体部IScから外側導体OSの第4導体部OSoに沿って屈曲形成されている。
【0040】
そして、外側導体OSの内側に内側導体ISを配置することによって、スロットSに挿入する前のセグメントSGが形成される。このように形成されたセグメントSGついて、外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiは同一のスロットSに挿入され、外側及び内側導体OS,ISの第4及び第3導体部OSo,ISoは前記第1及び第2導体部OSi,ISiとは異なる隣接する同相のスロットSに挿入される。
【0041】
例えば、外側及び内側導体OS,ISについて、第1及び第2導体部OSi,ISiをスロット番号「60」のスロットSに挿入したとき、第4及び第3導体部OSo,ISoをスロット番号「6」のスロットSに挿入するようになっている。つまり、1つのセグメントSGの第1及び第2導体部OSi,ISiと第4及び第3導体部OSo,ISoは、6スロットピッチの間隔をおいて挿入されることになる。
【0042】
そして、第4及び第3導体部OSo,ISoを挿入したスロット番号「6」のスロットSには、隣のセグメントSGの外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiが挿入される。さらに、その隣のセグメントSGは、自身の外側及び内側導体OS,ISの第4及び第3導体部OSo,ISoをスロットS番号「12」のスロットSに挿入させる。
【0043】
順次同様な方法で、セグメントSGをスロットSに挿入することによって、10個目のセグメントSGの外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiが、スロット番号「60」のスロットSに挿入されて1周する。周回した10個のセグメントSGを互いに接続することによって1相分の巻線が形成される。
【0044】
従って、スロットSが60個あり6相分の巻線が形成されるため、U相、V相、W相の3相巻線が2つ(第1系統3相巻線と第2系統3相巻線)形成されることになる。ここで、第1系統3相巻線と第2系統3相巻線とをそれぞれ特定して説明するときは、第1系統3相巻線の各相をU1相、V1相、W1相とし、第2系統3相巻線の各相をU2相、V2相、W2相という。なお、スロットSの内周面は、インシュレータ10(図9参照)が形成され、セグメントSGとステータ6のコア7との間を電気的に絶縁している。
【0045】
本実施形態では、第1系統3相巻線と第2系統3相巻線の各相の巻線が使用するスロットSが、表1で示すように割り当てられている。
【0046】
【表1】
表1から明らかなように、第1系統3相巻線のU1相は、スロット番号が「60」、「6」、「12」、「18」、「24」、「30」、「36」、「42」、「48」、「5
4」のスロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。
【0047】
そして、第1系統3相巻線のV1相は、第1系統3相巻線のU1相の巻線に対して、2スロットピッチずれた各スロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。また、第1系統3相巻線のW1相は、第1系統3相巻線のU1相の巻線に対して、4スロットピッチずれた各スロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。
【0048】
ちなみに、第2系統3相巻線のU2相は、第1系統3相巻線のU1相の巻線に対して、1スロットピッチずれて、スロット番号が「1」、「7」、「13」、「19」、「25」、「31」、「37」、「43」、「49」、「55」のスロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。
【0049】
同様に、第2系統3相巻線のV2相は、第2系統3相巻線のU2相の巻線に対して、2スロットピッチずれた各スロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。また、第2系統3相巻線のW2相は、第2系統3相巻線のU2相の巻線に対して、4スロットピッチずれた各スロットSに巻線が巻回(セグメントSGが挿入)されることがわかる。
【0050】
そして、上記の条件で60個全てのスロットSに、図5に示す波巻用の外側導体OSと重ね巻用の内側導体ISからなるセグメントSGを挿通する。続いて、全てのスロットSにセグメントSGについて、図6に示すように、外側導体OS及び内側導体ISを折り曲げ形成して各相の巻線を形成する。
【0051】
波巻用の外側導体OSの折り曲げは、スロットSから突出した部分の第1導体部OSi及び第4導体部OSoを互いに離間する方向に折り曲げる。そして、外側導体OSの第1及び第4導体部OSi,OSoについて、スロットSから突出し互いに離間する方向に折り曲げられた部分を第1及び第4溶接部OWi,OWoという。
【0052】
一方、重ね巻用の内側導体ISの折り曲げは、スロットSから突出した部分の第2導体部ISi及び第3導体部ISoを互いに近づく方向に折り曲げる。そして、内側導体ISの第2及び第3導体部ISi,ISoについて、スロットSから突出し互いに近づく方向に折り曲げられた部分を第2及び第3溶接部IWi,IWoという。
【0053】
(第1系統3相巻線)
次に、第1系統3相巻線について説明する。
ここで、10個のセグメントSGを使って、第1系統3相巻線の内のU1相の巻線の巻線方法について、図7及び図8に従って説明する。
【0054】
第1系統のU1相の巻線に使用されるスロットSは、表1に示すスロット番号のスロットSが割り当てられ、10個のセグメントSG1〜SG10が使用される。
ここで、1個目のセグメントSG1はスロット番号「60」及び「6」のスロットSに挿入される。2個目のセグメントSG2はスロット番号「6」及び「12」のスロットSに挿入される。3個目のセグメントSG3はスロット番号「12」及び「18」のスロットSに挿入される。4個目のセグメントSG4はスロット番号「18」及び「24」のスロットSに挿入される。5個目のセグメントSG5はスロット番号「24」及び「30」のスロットSに挿入される。
【0055】
さらに、6個目のセグメントSG6はスロット番号「30」及び「36」のスロットSに挿入される。7個目のセグメントSG7はスロット番号「36」及び「42」のスロッ
トSに挿入される。8個目のセグメントSG8はスロット番号「42」及び「48」のスロットSに挿入される。9個目のセグメントSG9はスロット番号「48」及び「54」のスロットSに挿入される。10個目のセグメントSG10はスロット番号「54」及び「60」のスロットSに挿入される。
【0056】
なお、セグメントSG1〜SG10を各スロットSに挿入する際、後続するセグメントが所定のスロットSに挿入し易いように、外側導体OSの連結導体部OSc及び内側導体ISの連結導体部IScを斜めに捻るように折り曲げ形成して挿入している。
【0057】
今、スロット番号「60」及び「6」には、U1相用の1個目のセグメントSG1が挿入されている。これによって、スロット番号「60」のスロットSには、内側導体ISの第2導体部ISiと外側導体OSの第1導体部OSiが配置され、スロット番号「6」のスロットSには、内側導体ISの第3導体部ISoと外側導体OSの第4導体部OSoが配置されている。
【0058】
スロット番号「6」及び「12」には、U1相用の2個目のセグメントSG2が挿入されている。これによって、スロット番号「6」のスロットSには、内側導体ISの第2導体部ISiと外側導体OSの第1導体部OSiが配置され、スロット番号「12」のスロットSには、内側導体ISの第3導体部ISoと外側導体OSの第4導体部OSoが配置されている。
【0059】
このとき、スロット番号「6」のスロットSには、1個目のセグメントSG1の内側及び外側導体IS,OSの第3及び第4導体部ISo,OSoが配置され、2個目のセグメントSG2の外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiが配置される。
【0060】
つまり、図9に示すように、スロットSに、径方向に内側から第1導体部OSi、第2導体部ISi、第3導体部ISo、第4導体部OSoの順に、4層構造(径方向積層構造)となって配置されている。そして、1個目のセグメントSG1の外側導体OS(スロット番号「6」を貫挿した)の第4溶接部OWoと、2個目のセグメントSG2の内側導体IS(スロット番号「12」を貫挿した)の第3溶接部IWoとを溶接する。
【0061】
スロット番号「12」及び「18」には、U1相用の3個目のセグメントSG3が挿入されている。これによって、スロット番号「12」のスロットSには、内側導体ISの第2導体部ISiと外側導体OSの第1導体部OSiが配置され、スロット番号「18」のスロットSには、内側導体ISの第3導体部ISoと外側導体OSの第4導体部OSoが配置されている。
【0062】
このとき、スロット番号「12」のスロットSには、2個目のセグメントSG2の内側及び外側導体IS,OSの第3及び第4導体部ISo,OSoが配置され、3個目のセグメントSG3の外側及び内側導体OS,ISの第1及び第2導体部OSi,ISiが配置される。そして、2個目のセグメントSG2の外側導体OS(スロット番号「12」を貫挿した)の第4溶接部OWoと、3個目のセグメントSG3の内側導体IS(スロット番号「18」を貫挿した)oの第3溶接部IWoとを溶接する。
【0063】
さらにまた、2個目のセグメントSG2の内側導体IS(スロット番号「6」を貫挿した)の第2溶接部IWiと、3個目のセグメントSG3の外側導体OS(スロット番号「12」を貫挿した)の第4溶接部OWoとを溶接する。以後、同様な、4〜10個のセグメントSG4〜SG10について、同様な工程を繰り返すことによって、図7及び図8に示すU1相の巻線が形成される。
【0064】
第1系統3相巻線の他のV1相,W1相の巻線もU1相の巻線と同様な方法で巻回される。また、第1系統3相巻線は3相Y結線で構成されている。従って、各相の巻線について中性点N1(図10参照)と接続する中性点端子T0u,T0v,T0w及び電力を受電する電力受電端子T1u,T1v,T1wを決めている。
【0065】
(中性点端子及び電力受電端子の設定)
図7、図3に示すように、本実施形態では、U1相の巻線について、1個目のセグメントSG1の外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0066】
ここで、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0067】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、U1相の中性点端子T0uとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、U1相の電力受電端子T1uとしている。
【0068】
つまり、中性点端子T0uは、スロット番号「60」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T1uは、スロット番号「6」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。
【0069】
従って、電力受電端子T1uは、中性点端子T0uよりスロットS内の径方向において外側に配置される。
また、図3に示すように、V1相の巻線について、スロット番号「56」及び「2」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0070】
同様に、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0071】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、V1相の中性点端子T0vとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、V1相の電力受電端子T1vとしている。
【0072】
つまり、中性点端子T0vは、スロット番号「56」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T1vは、スロット番号「2」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。
【0073】
従って、電力受電端子T1vは、中性点端子T0vよりスロットS内の径方向において外側に配置される。
また、図3に示すように、W1相の巻線について、スロット番号「52」及び「58」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IS
cを分離する。
【0074】
同様に、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0075】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、W1相の中性点端子T0wとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、W1相の電力受電端子T1wとしている。
【0076】
つまり、中性点端子T0wは、スロット番号「52」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T1wは、スロット番号「58」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。
【0077】
従って、電力受電端子T1wは、中性点端子T0wよりスロットS内の径方向において外側に配置される。
これによって、各相の電力受電端子T1u,T1v,T1wは、スロットS内の径方向において3番目に外側の位置にそれぞれ配置され、各相の中性点端子T0u,T0v,T0wは、スロットS内の径方向において最も内側にそれぞれ配置される。しかも、各相の電力受電端子T1u,T1v,T1wは互いに近い位置に配置されている。同様に、各相の中性点端子T0u,T0v,T0wも、各相の電力受電端子T1u,T1v,T1wの内側であって互いに近い位置に配置されている。
【0078】
従って、各相の中性点端子T0u,T0v,T0wを互いに接続する中性線L1nは、各相の電力受電端子T1u,T1v,T1wより内側に配置される。その結果、各相の電力受電端子T1u,T1v,T1wから引き出される各引出線L1u,L1v,L1wは、中性線L1nよりも外側に配置される。
【0079】
そして、各相の中性点端子T0u,T0v,T0wを互いに中性線L1nにて接続し、各相の電力受電端子T1u,T1v,T1wを受電端とすれば、第1系統の3相Y結線の巻線が形成され、図10に示すような電気回路が形成される。なお、図中、「L1」は、電力受電端子T1u,T1v,T1wからそれぞれの巻線が周回し、それぞれ外側導体OSの連結導体部OScの分離端と内側導体ISの連結導体部IScの分離端との接続点までのインダクタンスを示す。また。「L2」は、それぞれその外側導体OSの連結導体部OScの分離端と内側導体ISの連結導体部IScの分離端との接続点から、それぞれの各中性点端子T0u,T0v,T0wまでのインダクタンスを示す。
【0080】
(第2系統3相巻線)
次に、第2系統3相巻線について説明する。
第2系統3相巻線は、第1系統3相巻線と同様に3相Y結線である。そして、第2系統の3相各巻線は、第1系統の対応する3相各巻線と1スロットピッチずれて各スロットSにそれぞれ巻回される。
【0081】
従って、図11、図12に示すように、第2系統のU2相巻線は、第1系統のU1相巻線に対して、1スロットピッチずれて各スロットSにそれぞれ巻回される。
第2系統のU2相の巻線に使用されるスロットSは、表1に示すスロット番号のスロットSが割り当てられ、10個のセグメントSG1a〜SG10aが使用される。
【0082】
ここで、1個目のセグメントSG1aはスロット番号「1」及び「7」のスロットSに挿入される。2個目のセグメントSG2aはスロット番号「7」及び「13」のスロットSに挿入される。3個目のセグメントSG3aはスロット番号「13」及び「19」のスロットSに挿入される。4個目のセグメントSG4aはスロット番号「19」及び「25」のスロットSに挿入される。5個目のセグメントSG5aはスロット番号「25」及び「31」のスロットSに挿入される。
【0083】
さらに、6個目のセグメントSG6aはスロット番号「31」及び「37」のスロットSに挿入される。7個目のセグメントSG7aはスロット番号「37」及び「43」のスロットSに挿入される。8個目のセグメントSG8aはスロット番号「43」及び「49」のスロットSに挿入される。9個目のセグメントSG9aはスロット番号「49」及び「55」のスロットSに挿入される。10個目のセグメントSG10aはスロット番号「55」及び「1」のスロットSに挿入される。
【0084】
そして、第1系統のU1相巻線と同様に、各セグメントSG1a〜SG10aが結線されて第2系統のU2相の巻線が形成される。また、第2系統3相巻線の他のV2相,W2相の巻線もU2相の巻線と同様な方法で巻回される。
【0085】
さらに、第2系統3相巻線も同様に3相Y結線で構成されている。従って、各相の巻線について中性点N2(図13参照)と接続する中性点端子T0ua,T0va,T0wa及び電力を受電する電力受電端子T2u,T2v,T2wを決めている。
【0086】
(中性点端子及び電力受電端子の設定)
図3、図4に示すように、本実施形態では、U2相の巻線について、中性点端子T0ua及び電力受電端子T2uは、U1相の中性点端子T0u及び電力受電端子T1uに対して周方向において180度相対向する位置に設けられる。従って、U2相の巻線について、5個目のセグメントSG5aの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0087】
ここで、U1相巻線と同様に、図12に示すように、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0088】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、U2相の中性点端子T0uaとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、U2相の電力受電端子T2uとしている。
【0089】
つまり、中性点端子T0uaは、スロット番号「25」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T2uは、スロット番号「31」のスロットS内の径方向において3番目に外側に配置された内側導体ISの第3導体部ISoから引き出された端子である。
【0090】
従って、電力受電端子T2uは、中性点端子T0uaよりもスロットS内の径方向において外側に配置される。そして、U2相の電力受電端子T2u及び中性点端子T0uaは、それぞれU1相の電力受電端子T1u及び中性点端子T0uに対して、コア7の周方向に180度相対向する位置に配置される。
【0091】
次に、V2相の巻線について、中性点端子T0va及び電力受電端子T2vは、V1相の中性点端子T0v及び電力受電端子T1vに対して周方向において242度相対向する位置に設けられる。従って、図3、図4に示すように、V2相の巻線について、スロット番号「33」及び「39」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0092】
同様に、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0093】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、V2相の中性点端子T0vaとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、V2相の電力受電端子T2vとしている。
【0094】
つまり、中性点端子T0vaは、スロット番号「33」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T2vは、スロット番号「39」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。従って、電力受電端子T2vは、中性点端子T0vaよりスロットS内の径方向において外側に配置される。
【0095】
次に、W2相の巻線について、中性点端子T0wa及び電力受電端子T2wは、W1相の中性点端子T0w及び電力受電端子T1wに対して周方向において138度相対向する位置に設けられる。従って、図3、図4に示すように、W2相の巻線について、スロット番号「29」及び「35」に挿入されたセグメントSGの外側導体OS及び内側導体ISの連結導体部OSc,IScを分離する。
【0096】
同様に、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第4導体部OSoに繋がる方と、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第2導体部ISiに繋がる方とを接続する。
【0097】
そして、外側導体OSの連結導体部OScの分離端であって同外側導体OSの第1導体部OSiに繋がる方を、W2相の中性点端子T0waとしている。一方、内側導体ISの連結導体部IScの分離端であって同内側導体ISの第3導体部ISoに繋がる方を、W2相の電力受電端子T2wとしている。
【0098】
つまり、中性点端子T0waは、スロット番号「29」のスロットS内の径方向において最も内側に配置された外側導体OSの第1導体部OSiから引き出された端子である。また、電力受電端子T2wは、スロット番号「35」のスロットS内の径方向において3番目に外側の位置に配置された内側導体ISの第3導体部ISoから引き出された端子である。従って、電力受電端子T2wは、中性点端子T0waよりスロットS内の径方向において外側に配置される。
【0099】
これによって、各相の電力受電端子T2u,T2v,T2wは、スロットS内の径方向において3番目に外側の位置にそれぞれ配置され、各相の中性点端子T0ua,T0va,T0waは、スロットS内の径方向において最も内側にそれぞれ配置される。しかも、各相の電力受電端子T2u,T2v,T2wは互いに近い位置に配置されている。同様に、各相の中性点端子T0ua,T0va,T0waも、各相の電力受電端子T2u,T2v,T2wの内側であって互いに近い位置に配置されている。
【0100】
従って、各相の中性点端子T0ua,T0va,T0waを互いに接続する中性線L2nは、各相の電力受電端子T2u,T2v,T2wより内側に配置される。その結果、各相の電力受電端子T2u,T2v,T2wから引き出される各引出線L2u,L2v,L2wは、中性線L2nより径方向において外側に配置される。
【0101】
そして、各相の中性点端子T0ua,T0va,T0waを互いに接続し、各相の電力受電端子T2u,T2v,T2wを引き出せば、第2系統の3相Y結線の巻線が形成され、図13に示すような電気回路が形成される。なお、図中、「L1」は、電力受電端子T2u,T2v,T2wからそれぞれの巻線が周回し、それぞれ外側導体OSの連結導体部OScの分離端と内側導体ISの連結導体部IScの分離端との接続点までのインダクタンスを示す。また。「L2」は、それぞれその外側導体OSの連結導体部OScの分離端と内側導体ISの連結導体部IScの分離端との接続点から、それぞれの各中性点端子T0ua,T0va,T0waまでのインダクタンスを示す。
【0102】
上記のように第1系統3相巻線と第2系統3相巻線が巻回されたステータ6の内側には、図1に示すように、ロータ11が配設されている。
(ロータ11)
ロータ11は、回転軸12に貫挿固着されている。回転軸12は、本実施形態では非磁性体の金属シャフトであって、筒状ハウジング3のリアカバー壁3a及びフロントエンドプレート4に支持された軸受14,15により回転可能に支持されている。
【0103】
回転軸12に固着されたロータ11は、コンシクエントポール型構造のロータである。
ロータ11は、図14及び図15に示すように、鋼板よりなるロータコア片16aが複数積層されて形成されたロータコア16を有し、回転軸12に固着されている。
【0104】
ロータコア16は、図15に示すように、円筒状に形成され回転軸12に固着される軸固定筒部21と、その軸固定筒部21の外周面を一定の間隔を開けて内包する磁石固定筒部22と、軸固定筒部21と磁石固定筒部22とを一定の間隔に連結保持する橋絡部23を有している。
【0105】
磁石固定筒部22の外周面には、周方向に5個の扇状の凹部22aが等角度に、軸方向に凹設されている。そして、扇状の凹部22aを形成することで、凹部22aと凹部22aの間に5個の突極24が形成される。
【0106】
周方向に形成された5個の凹部22aには、図14に示すように、マグネットMGが固着配置されている。5個のマグネットMGは、ロータコア16に対して、径方向において内側の面がN極に、径方向においてステータ6側の面がS極となるように配置される。
【0107】
その結果、マグネットMGに対し周方向に隣り合う突極24の外側面(ステータ6側)はマグネットMGの外側面と異なる磁極であるN極となる。
なお、本実施形態のロータ11に対するステータ6におけるティース9の個数「Z」は、以下のように設定している。
【0108】
すなわち、ロータ11のマグネットMGの個数(=極数対)を「p」(但し、pは2以上の整数)とし、SC巻線の相数を「m」とすると、
ティース9の個数「Z」は、「Z=2×p×m×n(個)」(但し、「n」は自然数)となるように構成されている。
【0109】
ちなみに、図16に示すように、本実施形態では、この数式に基づいて、ティース9の
個数「Z」は、
Z=2×5(マグネットMGの個数)×3(相数)×2=60個
となる。
【0110】
軸固定筒部21と磁石固定筒部22とを連結保持する橋絡部23は、5個有し、各橋絡部23は軸固定筒部21の外周面から延出形成され、磁石固定筒部22の内周面と連結されている。5個の橋絡部23は、周方向に等間隔に配置され、その等間隔に配置された5個の橋絡部23は軸方向に沿って延出形成されている。
【0111】
また、各橋絡部23はの磁石固定筒部22の内周面との連結は、マグネットMGを嵌合固着した凹部22aと対応した位置に連結される。しかも、各橋絡部23は、径方向に延びる橋絡部23の径方向の中心線がマグネットMGの周方向の幅の中心位置を直交するように連結されている。
【0112】
従って、軸固定筒部21の外側面と磁石固定筒部22の内側面との間に形成された空間は、周方向に配置された5個の橋絡部23にて5個に分割され、5個の軸方向に貫通した空隙25が形成される。
【0113】
空隙25は、積層鋼板によりなるロータコア材より比重及び磁性が小さいことから、ロータコア16は、この空隙25が形成されることによって軽量となり、モータ全体の重量を軽量化することができる。
【0114】
(リアカバー壁3a)
回転軸12を回転可能に支持するリア側の軸受14は、筒状ハウジング3のリアカバー壁3aに支持されている。その筒状ハウジング3のリアカバー壁3aは、図1に示すように、その外周縁から平坦部31、振動吸収部32、振動受け部33、軸受収容部34が形成されている。
【0115】
平坦部31は、リアカバー壁3aの外周縁から径方向内側に向かって一定の幅屈曲形成された環状の平板部であって、その内周端がステータ6の径方向内周端より若干内側となる径方向位置まで延出形成されている。
【0116】
振動吸収部32は、環状の平坦部31の内側内周縁から縮径しながらロータ11側に向かって所定の位置まで延出形成された円錐筒形状の筒部であって、そのロータ11側に縮径して延びた先端円周縁がロータ11の軸線方向リア側の側面に近接する位置まで延出形成されている。
【0117】
振動受け部33は、振動吸収部32の先端内周縁から径方向内側に向かって一定の幅屈曲形成された環状の平板部であって、回転軸12に取着したリア側の軸受14の外周位置と一致する径方向側まで延出形成されている。
【0118】
軸受収容部34は、振動受け部33の内側内周縁から軸線方向リア側に向かって膨出形成した円筒部であって、そのリア側の外側円筒面が前記平坦部31のリア側外側面よりもリア側に突出しないように形成されている。すなわち、軸受収容部34は、振動吸収部32と振動受け部33にて形成されたロータ11側に凹設してなる椀状の凹部の中央部からリア側に突出しない。軸受収容部34の底面には貫通孔36が形成され、その貫通孔36から回転軸12の後端がリアカバー壁3aから突出するようになっている。
【0119】
(フロントエンドプレート4)
回転軸12を回転可能に支持するフロント側の軸受15は、フロントエンドプレート4
に支持されている。フロントエンドプレート4は、その外周縁から平坦部41、振動吸収部42、振動受け部43、軸受収容部44が形成されている。
【0120】
平坦部41は、フロントエンドプレート4の外周縁から径方向内側に向かって一定の幅屈曲形成された環状の平板部であって、その内周端がステータ6の径方向内周端より若干内側となる径方向位置まで延出形成されている。
【0121】
振動吸収部42は、環状の平坦部41の内側内周縁から縮径しながらロータ11側に向かって所定の位置まで延出形成された円錐筒形状の筒部であって、そのロータ11側に縮径して延びた先端円周縁がロータ11の軸線方向フロント側の側面に近接する位置まで延出形成されている。
【0122】
振動受け部43は、振動吸収部42の先端内周縁から径方向内側に向かって一定の幅屈曲形成された環状の平板部であって、回転軸12に取着したフロント側の軸受15の外周位置と一致する径方向側まで延出形成されている。
【0123】
軸受収容部44は、振動受け部43の内側内周縁から軸線方向フロント側に向かって膨出形成した円筒部であって、そのフロント側の外側円筒面が前記平坦部41のフロント側外側面よりもフロント側に突出しないように形成されている。すなわち、軸受収容部44は、振動吸収部42と振動受け部43にて形成されたロータ11側に凹設してなる椀状の凹部の中央部からリア側に突出しない。軸受収容部44の底面には貫通孔46が形成され、その貫通孔46から回転軸12の先端がフロントエンドプレート4から突出するようになっている。
【0124】
なお、本実施形態のブラシレスモータ1は、電動パワーステアリング装置等に用いられるものであって、前記ロータ11の回転軸12が、図示しない減速機に連結され、該減速機を介して被駆動部としての図示しないステアリングシャフト等の相手シャフトに連結され、同ステアリングシャフト等の相手シャフトを駆動するものである。
【0125】
筒状ハウジング3のリア側外側に固設した収容ボックス5内には、駆動装置50が収納されている。駆動装置50の回路基板51は、ロータ11の回転制御するための回転センサ52、ECU(電子制御ユニット)53、第1スイッチングトランジスタQ1u,Q1v,Q1w及び第2スイッチングトランジスタQ2u,Q2v,Q2w等の各種の回路素子が実装されている。
【0126】
回転センサ52は、リアカバー壁3aの軸受収容部34の貫通孔36から軸線方向に突出した回転軸12に相対向するように回路基板51に実装されている。回転センサ52は、本実施形態ではMRセンサ等の磁気センサからなり、回転軸12の軸端面に固着した同回転軸12と一体回転する検出用マグネット52aの回転角を検出する。
【0127】
ECU(電子制御ユニット)53は、マイクロコンピュータを有している。ECU53は、回転センサ52からの検出信号に基づいて、その時々のブラシレスモータ1の回転角度、回転速度等を検出する。そして、ECU53は、第1系統3相巻線及び第2系統3相巻線の各相へ電力供給タイミング演算する。
【0128】
第1スイッチングトランジスタQ1u,Q1v,Q1wは、例えば、パワーMOSトランジスタからなり、ECU53の制御信号に基づいて、オンオフ制御されるようになっている。第1スイッチングトランジスタQ1u,Q1v,Q1wは、所定のタイミングでオンオフ制御されることによって、第1系統3相巻線の各相に電力をそれぞれ供給制御する。これによって、第1系統3相巻線による回転磁界がステータ6に生成される。
【0129】
回路基板51に実装された第1スイッチングトランジスタQ1u,Q1v,Q1wは、軸線方向から見て、第1系統3相巻線に形成した各相の電力受電端子T1u,T1v,T1wと相対向する側に実装されている。そして、その回路基板51の第1スイッチングトランジスタQ1u,Q1v,Q1wとそれぞれ接続され、軸線方向から見て電力受電端子T1u,T1v,T1wと相対向する前記回路基板51の径方向外周側の位置には、各相に電力を供給する出力端子O1u,O1v,O1wがそれぞれ形成されている。
【0130】
従って、各相の電力受電端子T1u,T1v,T1wから引き出される各引出線L1u,L1v,L1wは、リアカバー壁3aの平坦部31に形成した第1挿通穴37を貫通して各相の電力受電端子T1u,T1v,T1wと各相に出力端子O1u,O1v,O1wとを軸線方向に最短距離でそれぞれ接続する。
【0131】
第2スイッチングトランジスタQ2u,Q2v,Q2wは、例えば、パワーMOSトランジスタからなり、ECU53の制御信号に基づいて、オンオフ制御されるようになっている。第2スイッチングトランジスタQ2u,Q2v,Q2wは、所定のタイミングでオンオフ制御されることによって、第2系統3相巻線の各相に電力をそれぞれ供給制御する。これによって、第2系統3相巻線による回転磁界がステータ6に生成される。
【0132】
回路基板51に実装された第2スイッチングトランジスタQ2u,Q2v,Q2wは、軸線方向から見て、第2系統3相巻線に形成した各相の電力受電端子T2u,T2v,T2wと相対向する側に実装されている。そして、その回路基板51の第1スイッチングトランジスタQ1u,Q1v,Q1wとそれぞれ接続され、軸線方向から見て電力受電端子T2u,T2v,T2wと相対向する位置には、各相に電力を供給する出力端子O2u,O2v,O2wがそれぞれ形成されている。
【0133】
従って、各相の電力受電端子T2u,T2v,T2wから引き出される各引出線L2u,L2v,L2wは、リアカバー壁3aの平坦部31に形成した第2挿通穴38を貫通して各相の電力受電端子T2u,T2v,T2wと各相に出力端子O2u,O2v,O2wとを軸線方向に最短距離でそれぞれ接続する。
【0134】
次に、上記実施形態の作用を以下に記載する。
回転時において、コンシクエントポール型のロータ11の磁気的アンバランスに基づく径方向の振動は、回転軸12を介してリア側の軸受14及びフロント側の軸受15に伝わる。本実施形態では、磁極対数が奇数倍の「5」であるため、大きな振動が生じる。この軸受14,15に伝わった径方向の振動は、それぞれ平坦部31よりロータ11側に位置する軸受収容部34,44に伝わって、振動受け部33,43を介して振動吸収部32,42に伝達される。
【0135】
この時、振動吸収部32,42は、平坦部31,41側の基端部を支点とし、振動受け部33,43側の先端部を作用点として、撓んで振動を吸収する。これによって、回転軸12の径方向の振動は、平坦部31,41に伝達されず、筒状ハウジング3の径方向の外周面に振動が伝わらない。その結果、回転が静かなブラシレスモータ1となり、静かな回転が必要とされる電動パワーステアリング装置に使用されるブラシレスモータ1としては最適となる。
【0136】
また、軸受14,15を支持する軸受収容部34,44を平坦部31,41よりロータ11側に形成したことにより、従来のように、軸受14がリア側に突出し、軸受15がフロント側に突出しないことから、その分だけ軸線方向の長さを小さくなる。
【0137】
また、ブラシレスモータ1のロータ11はコンシクエントポール型のロータにしたことから、ロータ11に取着するマグネットMGを半減させている。また、ステータ6はSC巻線を施しスロットS内の巻線の占有率が向上させている。しかも、ティース9の個数「Z」は、「Z=2×p×m×n(個)=60個」となるように設け、ロータ11の磁極当たりのスロットS数が多くコギングトルクの低減が図られている。
【0138】
次に、上記実施形態の効果を以下に記載する。
(1)本実施形態によれば、リアカバー壁3a及びフロントエンドプレート4にそれぞれ設けた軸受14,15を支持する軸受収容部34,44は、平坦部31,41より突出することなくロータ11側に形成した。
【0139】
従って、軸受14がリア側に、また、軸受15がフロント側にそれぞれ突出しないことから、その分だけ軸線方向の長さを小さくできる。
また、平坦部31,41側の内周端部を支点として、軸受収容部34,44を撓ませて、回転軸12の径方向の振動を吸収できる。
【0140】
(2)本実施形態によれば、リアカバー壁3a及びフロントエンドプレート4にそれぞれ振動吸収部32,42を設けた。従って、これら振動吸収部32,42によって、回転軸12に発生する径方向の振動は、より効果的に吸収される。その結果、回転が静かなブラシレスモータ1にすることができ、静かな回転が必要とされる電動パワーステアリング装置に使用されるブラシレスモータ1としては最適となる。
【0141】
しかも、振動吸収部32,42は、円錐筒形状であって、振動吸収部32,42と軸受収容部34,44とを、径方向においてそれぞれ振動受け部33,43を介して離間させるように構成した。従って、振動吸収部32,42がより撓みやすく、径方向の振動をより効率良く吸収することができる。
【0142】
(3)本実施形態によれば、ロータ11に空隙25を設けた。つまり、空隙25は、積層鋼板によりなるロータコア材より比重及び磁性が小さいことから、ロータコア16を軽量にし、ブラシレスモータ1全体の重量を軽量化することができる。
【0143】
(4)本実施形態によれば、軸受収容部34,44は、SC巻線の各セグメントSGのステータ6から軸線方向に突出した部位と軸方向で重なる位置に設けた。
従って、軸受収容部34,44は、ステータ6から軸線方向に突出した部位よりさらに軸線方向に突出しないことから、ブラシレスモータの軸線方向の全長を短くできる。
【0144】
(5)本実施形態によれば、軸受収容部34,44は、ロータ11側の開口部の先端が径方向においてマグネットMGと回転軸12との間に位置するように形成した。
従って、回転軸12に磁束が漏れることを抑制することができる。
【0145】
(6)本実施形態によれば、回転軸12のリア側先端面には、回転軸12の回転を検出する検出用マグネット52aを取着した。従って、回転軸12と一体回転する検出用マグネット52aの回転角を検出することによって、その時々の回転軸12の回転角度、回転速度等を検出することができる。その結果、巻線の各相へ電力供給タイミングを設定できる。
【0146】
上記実施の形態は、以下のように変更してもよい。
・上記実施形態では、振動吸収部32,42は、円錐筒形状であって、振動吸収部32,42と軸受収容部34,44とを、径方向において離間させた。これを、例えば、図17に示すように、振動吸収部32と振動受け部33を省略して実施してもよい。詳述すると、図17において、リアカバー壁3aにおいて、環状の平坦部31の内側内周縁から折り曲げ形成して軸受収容部34の外周壁34aをロータ11の軸線方向リア側の側面に近接する位置まで延出形成する。そして、その外周壁34aの先端内周縁からリア側に折り曲げ形成して軸受収容部34の内周壁34bを軸線方向リア側に向かって形成する。
【0147】
そして、外周壁34aと内周壁34bからなる2重構造の軸受収容部34にロータ側開口から軸受14を収容固着する。
この場合でも、2重構造の軸受収容部34は、外周壁34aと平坦部31の連結部分を支点として撓むことができ、回転軸12からの振動を吸収することができる。
【0148】
なお、図17に示す軸受収容部34は、外周壁34aと内周壁34bとを密接させた2重構造であったが、外周壁34aと内周壁34bとを、上記実施形態のように、振動受け部33を介在して離間させて実施させてもよい。
【0149】
・上記実施形態では、リアカバー壁3aとフロントエンドプレート4の両方に、振動吸収部32,42を設けたが、いずれか一方にもみ設けて実施してもよい。例えば、リアカバー壁3aだけに振動吸収部32を設けたり、フロントエンドプレート4だけに振動吸収部42を設けたりして実施してもよい。
【0150】
・上記実施形態では、スロットSの数を60個にしたが、これに限定されるものではなく、例えば、スロットSの数を45個にする等、適宜変更して実施してもよい。
・上記実施形態では、ロータ11に空隙25を形成したが、空隙25を形成しないロータに応用してもよい。
【0151】
・上記実施の形態では、マグネットMGの数は5個であったが、これに限定されるものではなく、2個、3個、または、それ以上であってもよい。勿論、ステータのスロットSの数を適宜変更して実施してもよい。
【0152】
・上記実施形態では、ステータ6はセグメントSGを挿入したSC巻線で実施したが、銅線等の巻線を巻回してなるステータに応用してもよい。
・上記実施形態では、検出用マグネット52aの位置について特に言及していないが、図18や図19に示すように、検出用マグネット52aを前記平坦部31(筒状ハウジング3の底面)よりも軸方向のフロント側となる位置に設けることが好ましい。このような構成とすることで、回転軸12のリア側の端部を平坦部31よりもリア側に突出することがないため、モータ1の軸方向の全長を短くできる。
【0153】
・上記実施形態では、特に言及していないが、例えば図19に示すように、回転センサ52を配置する回路基板51を平坦部31と軸方向において当接させる構成とすることが望ましい。このような構成とすることで、平坦部31と回路基板51とを離間させた構成(図1参照)と比較して、モータ1の軸方向の全長を短くできる。また、回路基板51上の回転センサ52やECU53等の各種回路素子によって発熱しても、平坦部31との当接によって筒状ハウジング3(モータケース2)から放熱することが可能となる。
【0154】
・上記実施形態では、特に言及していないが、例えば図19に示すように、貫通孔36の孔径S1は、検出用マグネット52aの直径S2よりも小さいことが望ましい。このような構成とすることで、貫通孔36を回転軸12に近接されて、ステータ6のマグネットMGから回転軸12側に漏れた磁束が貫通孔36の端面から筒状ハウジング3を通ってマグネットMGに戻るため、検出用マグネット52aが固定された部位が磁化されることが抑制される。これにより、磁化された回転軸12の影響によって検出用マグネット52aの磁界が歪むことが抑制できるようになっている。
【0155】
・上記実施形態では、モータとしてブラシレスモータ1に具体化したが、これをブラシ付きモータに具体化してもよい。
・上記実施形態では、コンシクエントポール型のロータ11は、所謂、SPM(Surface Permanent Magnet Motor)型であったが、これを、IPM(Interior Permanent Magnet Motor)型のロータに応用してもよい。
【0156】
・上記実施形態では、ブラシレスモータ1は、電動パワーステアリング装置(EPS)に用いられるEPS用モータであったが、それ以外のパワーウィンド用モータ、ワイパー駆動用モータ等、その他のモータに応用してもよい。
【符号の説明】
【0157】
1…ブラシレスモータ(モータ)、2…モータケース、3…筒状ハウジング、3a…リアカバー壁(リア側壁面)、4…フロントエンドプレート(フロント側壁面)、5…収容ボックス、6…ステータ、7…コア、8…円筒部、9…ティース、10…インシュレータ、11…ロータ、12…回転軸、14,15…軸受、16…ロータコア、21…軸固定筒部、22…磁石固定筒部、22a…凹部、23…橋絡部、24…突極、25…空隙、31,41…平坦部、32,42…振動吸収部、33,43…振動受け部、34,44…軸受収容部、36…貫通孔、37…第1挿通穴、38…第2挿通穴、46…貫通孔、50…駆
動装置、51…回路基板、52…回転センサ、52a…検出用マグネット、53…ECU(電子制御ユニット)、S…スロット、S1…孔径、S2…直径、IS…内側導体、MG…マグネット、N1,N2…中性点、OS…外側導体、SG…セグメント、ISc,OSc…連結導体部、ISi…第2導体部、ISo…第3導体部、IWi…第2溶接部、IWo…第3溶接部、L1n,L2n…中性線、L1u,L1v,L1w,L2u,L2v,L2w…引出線、O1u,O1v,O1w,O2u,O2v,O2w…出力端子、OSi…第1導体部、OSo…第4導体部、OWi…第1溶接部、OWo…第4溶接部、Q1u,Q1v,Q1w…第1スイッチングトランジスタ、Q2u,Q2v,Q2w…第2スイッチングトランジスタ、SG1〜SG10,SG1a〜SG10a…セグメント、T0u,T0v,T0w,T0ua,T0va,T0wa…中性点端子、T1u,T1v,T1w,T2u,T2v,T2w…電力受電端子。
【特許請求の範囲】
【請求項1】
2×p極(但し、pは極数対)の磁極が周方向に交互に配置されたコンシクエントポール型のロータと、
前記ロータを内包し、前記ロータの1磁極当たり複数個設けられる、前記ロータと径方向に対向して2×p×m×n個(但し、mはステータ巻線の相数、nは自然数)のティース及びスロットを有するコアと前記スロットに巻回された多相の巻線とを有するステータと
を備え、前記ロータ及び前記ステータが筒状モータケースに内包されてなるモータであって、
筒状モータケースの軸方向のリア側壁面またはフロント側壁面の少なくともいずれか一方の壁面は、
前記壁面の外周縁から径方向内側に向かって前記ステータの径方向内周端より内側となる径方向位置まで延出形成した平坦部と、
前記壁面の中央部であって前記平坦部より前記ロータ側に開口部を有し、前記ロータに固着した回転軸を回転可能に支持する軸受を前記開口部から収容し固定する軸受収容部とを備えたことを特徴とするモータ。
【請求項2】
請求項1に記載のモータにおいて、
前記軸受収容部は、前記ロータ側の開口部の先端が径方向において前記磁極と前記回転軸との間に位置するように形成されていることを特徴とするモータ。
【請求項3】
請求項1又は2に記載のモータにおいて、
前記回転軸のリア側先端面には、前記回転軸の回転を検出する検出用マグネットが取着されていることを特徴とするモータ。
【請求項4】
請求項1〜3のいずれか1に記載のモータにおいて、
前記スロットに巻回された巻線は、SC巻線であることを特徴とするモータ。
【請求項5】
請求項1〜4にいずれか1に記載のモータにおいて、
前記平坦部と軸受収容部の間には、
前記平坦部の内周縁から前記ロータ側に向かって延出形成された円筒形状の振動吸収部と、
前記ロータ側に延びた前記振動吸収部の先端円周縁と前記軸受収容部のロータ側の開口部とを連結する環状平板形状の振動受け部と
が設けられていることを特徴とするモータ。
【請求項6】
請求項5に記載のモータにおいて、
前記振動吸収部は、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円錐筒形状の筒体であって、そのロータ側に縮径して延びた先端円周縁に前記振動受け部の外周端が連結されることを特徴とするモータ。
【請求項7】
請求項4〜6のいずれか1に記載のモータにおいて、
前記軸受収容部は、前記SC巻線の前記ステータから軸線方向に突出した部位と軸方向で重なる位置に設けられていることを特徴とするモータ。
【請求項8】
請求項1〜7のいずれか1に記載のモータにおいて、
前記コンシクエントポール型のロータの極数対は、奇数倍であることを特徴とするモータ。
【請求項9】
請求項1〜8のいずれか1に記載のモータにおいて、
前記コンシクエントポール型のロータは、ロータコア材より比重及び磁性が小さい小磁性軽量部分を形成したことを特徴とするモータ。
【請求項10】
請求項1〜9のいずれか1に記載のモータにおいて、
前記回転軸のリア側先端面には、前記回転軸の回転を検出する検出用マグネットが取着され、
前記平坦部と軸受収容部の間には、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円筒形状の振動吸収部を備え、
前記検出用マグネットは、前記平坦部より前記軸方向のフロント側となる位置に設けられたことを特徴とするモータ。
【請求項11】
請求項10に記載のモータにおいて、
前記検出用マグネットを検出する検出センサが配置される回路基板を備え、
前記回路基板は前記平坦部と軸方向で当接配置されることを特徴とするモータ。
【請求項12】
請求項10又は11に記載のモータにおいて、
前記筒状モータケースの軸方向のリア側壁面に前記回転軸を挿通するための貫通孔が形成され、
前記貫通孔の孔径は、前記検出用マグネットよりも小さいことを特徴とするモータ。
【請求項13】
請求項1〜12のいずれか1に記載のモータにおいて、
電動パワーステアリングモータに用いたことを特徴とするモータ。
【請求項1】
2×p極(但し、pは極数対)の磁極が周方向に交互に配置されたコンシクエントポール型のロータと、
前記ロータを内包し、前記ロータの1磁極当たり複数個設けられる、前記ロータと径方向に対向して2×p×m×n個(但し、mはステータ巻線の相数、nは自然数)のティース及びスロットを有するコアと前記スロットに巻回された多相の巻線とを有するステータと
を備え、前記ロータ及び前記ステータが筒状モータケースに内包されてなるモータであって、
筒状モータケースの軸方向のリア側壁面またはフロント側壁面の少なくともいずれか一方の壁面は、
前記壁面の外周縁から径方向内側に向かって前記ステータの径方向内周端より内側となる径方向位置まで延出形成した平坦部と、
前記壁面の中央部であって前記平坦部より前記ロータ側に開口部を有し、前記ロータに固着した回転軸を回転可能に支持する軸受を前記開口部から収容し固定する軸受収容部とを備えたことを特徴とするモータ。
【請求項2】
請求項1に記載のモータにおいて、
前記軸受収容部は、前記ロータ側の開口部の先端が径方向において前記磁極と前記回転軸との間に位置するように形成されていることを特徴とするモータ。
【請求項3】
請求項1又は2に記載のモータにおいて、
前記回転軸のリア側先端面には、前記回転軸の回転を検出する検出用マグネットが取着されていることを特徴とするモータ。
【請求項4】
請求項1〜3のいずれか1に記載のモータにおいて、
前記スロットに巻回された巻線は、SC巻線であることを特徴とするモータ。
【請求項5】
請求項1〜4にいずれか1に記載のモータにおいて、
前記平坦部と軸受収容部の間には、
前記平坦部の内周縁から前記ロータ側に向かって延出形成された円筒形状の振動吸収部と、
前記ロータ側に延びた前記振動吸収部の先端円周縁と前記軸受収容部のロータ側の開口部とを連結する環状平板形状の振動受け部と
が設けられていることを特徴とするモータ。
【請求項6】
請求項5に記載のモータにおいて、
前記振動吸収部は、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円錐筒形状の筒体であって、そのロータ側に縮径して延びた先端円周縁に前記振動受け部の外周端が連結されることを特徴とするモータ。
【請求項7】
請求項4〜6のいずれか1に記載のモータにおいて、
前記軸受収容部は、前記SC巻線の前記ステータから軸線方向に突出した部位と軸方向で重なる位置に設けられていることを特徴とするモータ。
【請求項8】
請求項1〜7のいずれか1に記載のモータにおいて、
前記コンシクエントポール型のロータの極数対は、奇数倍であることを特徴とするモータ。
【請求項9】
請求項1〜8のいずれか1に記載のモータにおいて、
前記コンシクエントポール型のロータは、ロータコア材より比重及び磁性が小さい小磁性軽量部分を形成したことを特徴とするモータ。
【請求項10】
請求項1〜9のいずれか1に記載のモータにおいて、
前記回転軸のリア側先端面には、前記回転軸の回転を検出する検出用マグネットが取着され、
前記平坦部と軸受収容部の間には、前記平坦部の内周縁から前記ロータ側に向かって延出形成された円筒形状の振動吸収部を備え、
前記検出用マグネットは、前記平坦部より前記軸方向のフロント側となる位置に設けられたことを特徴とするモータ。
【請求項11】
請求項10に記載のモータにおいて、
前記検出用マグネットを検出する検出センサが配置される回路基板を備え、
前記回路基板は前記平坦部と軸方向で当接配置されることを特徴とするモータ。
【請求項12】
請求項10又は11に記載のモータにおいて、
前記筒状モータケースの軸方向のリア側壁面に前記回転軸を挿通するための貫通孔が形成され、
前記貫通孔の孔径は、前記検出用マグネットよりも小さいことを特徴とするモータ。
【請求項13】
請求項1〜12のいずれか1に記載のモータにおいて、
電動パワーステアリングモータに用いたことを特徴とするモータ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2012−235671(P2012−235671A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−187910(P2011−187910)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000101352)アスモ株式会社 (1,622)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000101352)アスモ株式会社 (1,622)
【Fターム(参考)】
[ Back to top ]