
モータ
【課題】モータトルクを高めるとともに、トルク変動を低減でき滑らかな回転が可能なモータを提供する。
【解決手段】モータは、ロータヨーク及びロータヨークの外周または内周に設けられて、ロータヨークの円周方向に向かって配列される複数のマグネットを含むロータと、ロータヨークとの間にギャップを有して環状に配置されるステータコア及びステータコアを励磁させる励磁コイルを含むステータと、を含み、マグネットの外周部の円弧の中心とマグネットの内周部の円弧の中心とが一致するとともに、マグネットの外周部またはマグネットの内周部の円弧の中心とロータの回転中心とが一致しない。
【解決手段】モータは、ロータヨーク及びロータヨークの外周または内周に設けられて、ロータヨークの円周方向に向かって配列される複数のマグネットを含むロータと、ロータヨークとの間にギャップを有して環状に配置されるステータコア及びステータコアを励磁させる励磁コイルを含むステータと、を含み、マグネットの外周部の円弧の中心とマグネットの内周部の円弧の中心とが一致するとともに、マグネットの外周部またはマグネットの内周部の円弧の中心とロータの回転中心とが一致しない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータに関するものである。
【背景技術】
【0002】
特許文献1では、永久磁石における外周面の円弧半径中心の偏芯率を最適な範囲内に設定することによって、永久磁石形モータのコギングトルク及びトルクリップルを低減する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−275285号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のモータでは、磁石外周面の円弧と磁石内周面の円弧とが異なるため、磁石の総体積が低減される。このため、特許文献1に記載の磁石は、磁石の総磁束量が低減する傾向にあり、モータとした場合に、モータトルクが低下するおそれがある。また、磁石外周面の円弧半径中心と磁石内周面の円弧半径中心とが異なるため、磁石は半径方向の厚みに薄い部分が存在し、この薄い部分が反磁界に対して弱くなるおそれがある。このため、磁石が減磁しないように、ステータの電気装荷を大きくすることができず、モータトルクを大きくすることができないおそれがある。
【0005】
本発明は、上記に鑑みてなされたものであって、モータトルクを高めるとともに、トルク変動を低減でき滑らかな回転が可能なモータを提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し目的を達成するために、モータは、ロータヨーク及び前記ロータヨークの外周または内周に設けられて、前記ロータヨークの円周方向に向かって配列される複数のマグネットを含むロータと、前記ロータヨークとの間にギャップを有して環状に配置されるステータコア及び前記ステータコアを励磁させる励磁コイルを含むステータと、を含み、前記マグネットの外周部の円弧の中心と前記マグネットの内周部の円弧の中心とが一致するとともに、前記マグネットの外周部または前記マグネットの内周部の円弧の中心と前記ロータの回転中心とが一致しないことを特徴とする。
【0007】
この構成により、マグネットの内周部と外周部との間での厚みは一定となり、磁石体積低下による総磁束量の低減を抑制することができる。また、モータは、マグネットの減磁耐力を高めることができる。このため、ステータの励磁コイルの電気装荷を大きくし、モータはモータトルクを増加させることもできる。
【0008】
また、上記構成により、マグネットの外周部の円弧の中心またはマグネットの内周部の円弧の中心と、ロータの回転中心とが一致しないことから、マグネットからステータコアへ鎖交する磁束の変化を滑らかにすることができる。このため、モータは、トルク変動を低減でき滑らかな回転が可能となる。そして、モータは、マグネットからステータコアへ鎖交する磁束が急に増加または減少することに伴うコギングトルク及びトルクリップルを抑制することができる。
【0009】
本発明の望ましい態様として、前記ロータヨークは、前記マグネットの外周部の円弧の半径または前記マグネットの内周部の円弧の半径と同じ半径の円弧となる密着面を有していることが好ましい。
【0010】
この構成により、マグネットの外周部または内周部は、ロータヨークと密着し、隙間を生じることによる磁束漏れのおそれを低減できる。その結果、モータは、マグネットの磁束を有効利用することによりモータトルクの低下を抑制することができる。また、モータは、マグネットとロータヨークとが沿うことから、マグネットの固定を安定させることができる。
【0011】
本発明の望ましい態様として、前記マグネットの前記ステータ側に突出している角部から前記ロータヨークまでの最短距離は、前記ギャップの距離以上であることが好ましい。
【0012】
この構成により、マグネットの角部からステータコアへ鎖交する磁束の磁気抵抗を、マグネットの角部からロータヨークへ鎖交する磁束の磁気抵抗以下とすることができる。これにより、モータは、モータトルクの低下を抑制することができる。
【0013】
本発明の望ましい態様として、前記ロータと連動して回転する回転軸をさらに備え、前記回転軸と回転させる負荷体とを直結していることが好ましい。
【0014】
この構成により、モータはいわゆるダイレクトドライブモータとなり、直接負荷体を回転することができる。また、モータは、トルク変動を低減でき滑らかな回転が可能となる。そして、モータは、モータトルクを高めるとともに、コギングトルク及びトルクリップルを低減できるので、回転体を支持する軸受の寿命劣化を抑制することができる。
【発明の効果】
【0015】
本発明によれば、モータトルクを高めるとともに、トルク変動を低減でき滑らかな回転が可能なモータを提供することができる。
【図面の簡単な説明】
【0016】
【図1】図1は、回転中心を含む仮想平面で実施形態1のモータの構成を切って模式的に示す断面図である。
【図2】図2は、実施形態1のモータの構成を回転中心に直交する仮想平面で切ってロータを模式的に示す部分断面図である。
【図3】図3は、実施形態1のロータとステータとの関係を模式的に示す説明図である。
【図4】図4は、実施形態2のモータの構成を回転中心に直交する仮想平面で切ってロータを模式的に示す部分断面図である。
【図5】図5は、実施形態2のロータとステータとの関係を模式的に示す説明図である。
【発明を実施するための形態】
【0017】
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。
【0018】
(実施形態1)
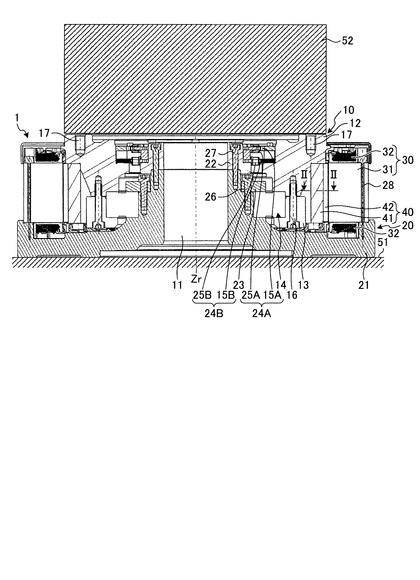
図1は、回転中心を含む仮想平面で実施形態1のモータの構成を切って模式的に示す断面図である。モータ1は、ギヤ、ベルトまたはローラ等の伝達機構を介在させることなく負荷体52に回転力をダイレクトに伝達し、負荷体52を回転させることができる。モータ1は、いわゆるモータ回転軸10と負荷体52とを直結したダイレクトドライブモータである。
【0019】
モータ1は、静止状態に維持される固定子(以下、ステータという)30と、ステータ30に対して回転可能に配置された回転子(以下、ロータという)40と、ステータ30を固定して支持部材51に取り付けられるベース部材20と、ロータ40に固定されてロータ40とともに回転可能なモータ回転軸10と、ベース部材20とモータ回転軸10との間に介在されてモータ回転軸10をベース部材20に対して回転可能に支持する軸受14と、を含む。
【0020】
ベース部材20、モータ回転軸10、ロータ40及びステータ30はいずれも環状の構造体である。モータ回転軸10、ロータ40及びステータ30は、回転中心Zrを中心に同心状に配置されている。また、モータ1は、回転中心Zrから外側へロータ40、ステータ30の順に配置されている。このようなモータ1は、インナーロータ型と呼ばれ、ロータ40がステータ30よりも回転中心Zr寄りとなる。また、モータ1は、モータ回転軸10、ロータ40及びステータ30がベース部材20の上に配置されている。
【0021】
ベース部材20は、略円板状のハウジングベース21と、中空部11が貫通し、中空部11を囲むようにハウジングベース21から凸状に突出した軸心となるハウジングインナ22を備えている。ハウジングインナ22は、ハウジングベース21にボルト等の固定部材27を介して締結され固定されている。また、ベース部材20は、ボルト等の固定部材26を介してハウジングベース21に軸受14の内輪を固定するハウジングフランジ23とを含む。
【0022】
ハウジングベース21の外周縁には、ステータ30がボルト等の固定部材28によって締結されている。これにより、ステータ30はハウジングベース21に対して位置決め固定されている。ステータ30の中心軸は、ロータ40の回転中心Zrと一致する。
【0023】
ステータ30は、筒状のステータコア31と、励磁コイル32とを含む。ステータ30は、ステータコア31に励磁コイル32が巻きつけられる。ステータ30には、電源からの電力を供給するための配線(図示しない)が接続されており、この配線を通じて励磁コイル32に対して電力が供給されるようになっている。
【0024】
ロータ40は、ロータ40の外径がステータ30の内径寸法も小さな円筒状である。ロータ40は、ロータヨーク41及びロータヨーク41の外周に貼り付けられたマグネット42を含む。なお、マグネット42については、後述する。
【0025】
モータ回転軸10は、円環状の回転軸12と、ボルト等の固定部材16を介して回転軸12に軸受14の外輪を固定するロータフランジ13とを含む。ロータ40は、円筒状のモータ回転軸10の回転軸12に一体的に固定されている。ロータ40は、円筒状のモータ回転軸10の回転軸12に固定部材により固定されてもよい。回転軸12は、円環の中心軸がモータ1の回転中心Zrと同軸に形成されている。
【0026】
また、軸受14は、外輪がロータフランジ13に固定され、内輪がハウジングフランジ23に固定されている。これにより、軸受14は、ハウジングベース21に対して、回転軸12及びロータ40を回転自在に支持することができる。このため、モータ1は、回転軸12及びロータ40をハウジングベース21及びステータ30に対して回転させることができる。
【0027】
なお、軸受14は、転動体をクロスローラとしたクロスローラ軸受としてもよい。なお、軸受14は、クロスローラ軸受に限定されず、例えば転動体を玉やころ(円筒ころ、円錐ころ、球面ころなど)とした玉軸受やころ軸受としてもよい。これらの転動体は、環状を成す保持器のポケットに1つずつ所定間隔、例えば等間隔で配列し、このポケット内で回転自在に保持された状態で軌道面間に組み込んでもよい。これにより、各転動体は所定間隔を保った状態で、その転動面が相互に接触することなく、上記軌道面間を転動することができる。また、各転動体は、相互に接触して摩擦が生じることによる回転抵抗の増大や、焼付きなどを防止することができる。
【0028】
軸受14は、例えば転動体を玉とした場合、保持器を波型の合わせタイプや冠型などとすることができる。または、軸受14は、転動体を各種のころとした場合、保持器をもみ抜き型、くし型及びかご型などとすることができる。
【0029】
また、モータ1は、回転検出器24A、24Bを備えることが好ましい。回転検出器24A、24Bは、例えばレゾルバであって、ロータ40及びモータ回転軸10の回転位置を高精度に検出することができる。
【0030】
回転検出器24A、24Bは、静止状態に維持されるレゾルバステータ25A、25Bと、レゾルバステータ25A、25Bと所定のギャップを隔てて対向配置され、レゾルバステータ25A、25Bに対して回転可能なレゾルバロータ15A、15Bを備えており、軸受14の上方に配設されている。
【0031】
レゾルバステータ25A、25Bは、複数のステータ磁極が円周方向に等間隔に形成された環状の積層鉄心を有し、各ステータ磁極にレゾルバコイルが巻回されている。本実施形態のモータ1では、レゾルバステータ25A、25Bは、ハウジングインナ22に固定されている。
【0032】
レゾルバロータ15A、15Bは、中空環状の積層鉄心により構成されており、モータ回転軸10の内側に固定されている。回転検出器24A、24Bの配設位置は、ロータ40(モータ回転軸10)の回転を検出することが可能であれば特に限定されず、モータ回転軸10及びベース部材20の形状に応じて任意の位置へ配設することができる。
【0033】
ロータ40が回転すると、ロータ40とともにモータ回転軸10が回転し、連動してレゾルバロータ15A、15Bも回転する。これにより、レゾルバロータ15A、15Bと、レゾルバステータ25A、25Bとの間のリラクタンスが連続的に変化する。レゾルバステータ25A、25Bは、リラクタンスの変化を検出し、レゾルバ制御回路によって電気信号(デジタル信号)に変換する。モータ1を制御する制御装置は、レゾルバ制御回路の電気信号に基づいて、単位時間当たりのレゾルバロータ15A、15Bと連動するモータ回転軸10及びロータ40の位置や回転角度を演算処理することができる。その結果、モータ1を制御する制御装置は、モータ回転軸10の回転状態(例えば、回転速度、回転方向あるいは回転角度など)を計測することが可能となる。
【0034】
なお、上述したレゾルバロータ15Aは、中空部11に対して偏心させた内周を有する円環状となっている。このため、ロータ40の回転に伴ってレゾルバロータ15Aが回転すると、レゾルバステータ25Aとの間の距離を円周方向に連続して変化させ、両者の間のリラクタンスがレゾルバロータ15Aの位置により連続的に変化する。レゾルバロータ15Aの1回転につき、リラクタンス変化の基本波成分が1周期となる単極レゾルバ信号を出力しており、回転検出器24Aはいわゆる単極レゾルバとなる。
【0035】
また、レゾルバロータ15Bは、突極状の複数の歯が円周方向に等間隔で形成される。このため、ロータ40の回転に伴ってレゾルバロータ15Bが回転すると、レゾルバステータ25Bとの間の距離を円周方向に周期的に変化させ、両者の間のリラクタンスがレゾルバロータ15Bの歯の位置により連続的に変化する。レゾルバロータ15Bの1回転につき、リラクタンス変化の基本波成分が多周期となる多極レゾルバ信号を出力しており、回転検出器24Bはいわゆる多極レゾルバとなる。
【0036】
このように、モータ1は、ロータ40の1回転につき、リラクタンス変化の基本波成分の周期が異なる回転検出器24A及び回転検出器24Bを備えることにより、モータ回転軸10の絶対位置を把握することができ、また、モータ回転軸10の回転状態(例えば、回転速度、回転方向あるいは回転角度など)を計測する精度を高めることができる。
【0037】
モータ1は、ハウジングベース21が支持部材51に取り付けられることで、支持部材51に対して位置決め固定される。ハウジングベース21は、支持部材51に取り付けられた状態において、支持部材51の取付面と接する一連の連続面を少なくとも1つ有している。この連続面は、モータ1の自重や回転時の振動などを支持部材51に分散して作用させることができる。このため、ハウジングベース21に歪み(撓み)が生ずるおそれを防止することができる。
【0038】
モータ1は、例えばボルト等の固定部材17により負荷体52が回転軸12に直接固定されている。負荷体52の質量が大きい場合、モータ1は、モータトルクを十分備えている必要がある。また、モータ1は、ロータ40の回転にコギングトルク及びトルクリップルを含んでいると、回転軸12の振動を生じさせるおそれがある。回転軸12の振動は、負荷体52に伝達される。これにより、負荷体52の重心が振れるようにモーメントがかかる場合、モータ1の軸受14の寿命を短くしてしまうおそれがある。
【0039】
以上説明したように、モータ1は、伝達機構を介在させることなく負荷体52に回転力をダイレクトに伝達できる。このため、負荷体52を回転させる場合、モータ1は、モータトルクを高めるとともに、コギングトルク及びトルクリップルを低減することが求められる。
【0040】
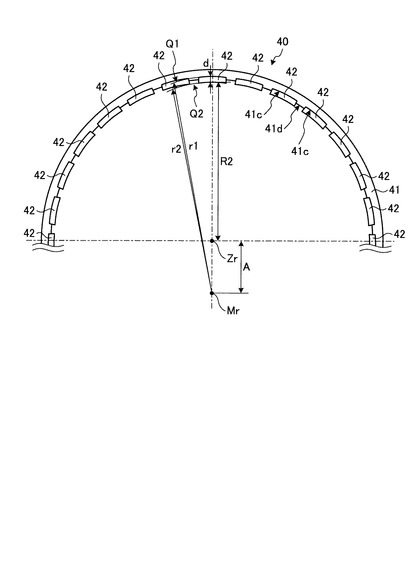
図2は、実施形態1のモータの構成を回転中心に直交する仮想平面で切ってロータを模式的に示す部分断面図である。図2は、例えば図1のII−II断面を視ている。図2に示すように、ロータ40は、ロータヨーク41と、マグネット42とを含む。ロータヨーク41は、筒状に形成される。ロータヨーク41は、電磁鋼板、冷間圧延鋼板などの薄板が、接着、ボス、カシメなどの手段により積層されて製造される。例えば、ロータヨーク41は、順次金型の型内で積層され、金型から排出される。
【0041】
マグネット42は、ロータヨーク41の外周表面に沿って貼り付けられ、複数設けられている。マグネット42は、永久磁石であり、S極及びN極がロータヨーク41の円周方向に交互に等間隔で配置される。これにより、図2に示すロータ40の極数は、ロータヨーク41の外周側にN極と、S極とがロータヨーク41の円周方向に交互に配置された28極である。なお、ロータ40の極数は、28極に限られず、例えば20極または36極でもよく、必要に応じて適宜変更できる。また、永久磁石は、例えばNd−Fe−B系磁石を用いることができる。
【0042】
ロータヨーク41の外周には、マグネット42を位置決めする位置決め凸部41bが円周方向に複数設けられている。位置決め凸部41b間は、マグネット42を収容する凹部となっており、ロータヨーク41の外周に空けられた溝となる。マグネット42は、マグネット42を収容する凹部の密着面41aに貼り付けられる。マグネット42は、ロータヨーク41の位置決め凸部41b間に収容され、例えば、密着面41aに接着剤により取り付けられる。本実施形態では、マグネット42は、ロータヨーク41の外周表面の密着面41aに沿って貼り付けられ、複数設けられている分割形状(セグメント構造)のセグメント磁石である。
【0043】
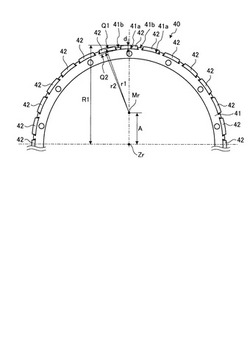
図2において、ロータ40の回転半径R1は、回転中心Zrから半径方向に最も遠い距離であるマグネット42の最外周表面までの距離である。マグネット42の半径方向の外周部(外周表面)における回転方向の円弧の半径(曲率半径)をr1とする。仮想曲線Q1は、マグネット42の外周部における円弧を延長した曲線である。マグネット42の半径方向の外周部(外周表面)の円弧は、仮想曲線Q1の円弧の中心Mrから半径r1とされている。マグネット42の半径方向の内周部(内周表面)における回転方向の円弧の半径(曲率半径)をr2とする。仮想曲線Q2は、マグネット42の内周部における円弧を延長した曲線である。マグネット42の半径方向の内周部(内周表面)の円弧は、仮想曲線Q2の円弧の中心Mrから半径r2とされている。
【0044】
実施形態1のマグネット42は、仮想曲線Q1の円弧の中心と、仮想曲線Q2の円弧の中心とが同じ中心Mrとなり、一致する。また、仮想曲線Q1の円弧の半径r1と仮想曲線Q2の円弧の半径r2は、r1>r2の関係となる。なお、マグネット42の外周部とは、マグネット42の回転中心Zrから遠い側の表面をいい、マグネット42の内周部とは、マグネット42の回転中心Zrから近い側の表面をいう。仮想曲線Q1の円弧の中心と、仮想曲線Q2の円弧の中心とが一致するとは、ある程度の許容範囲(誤差、公差等)を含む。
【0045】
この構造により、マグネット42の外周部及び内周部の間であるマグネット42の厚みdは一定となり、部分的に薄い部分が低減されるので、限られたマグネット42の磁石量で必要な磁束を確保することができる。ここで、厚みdは、マグネット42の外周部の起点位置と円弧の中心Mrとを結ぶ直線がマグネット42の内周部(内周表面)に交差した位置と外周部の起点位置との距離である。つまり、外周部の円弧の半径r1と内周部の円弧の半径r2との差が厚みdとなる。
【0046】
また、仮想曲線Q1の円弧の中心Mrと、ロータ40の回転中心Zrとは、重なり合わない。例えば、仮想曲線Q1の円弧の中心Mrは、マグネット42からみて回転中心Zrよりも半径方向に近い側にシフト量Aだけずれている。シフト量Aのロータ40の回転半径R1に対する比は、例えば百分率で30%となっている。これにより、仮想曲線Q1の曲率は、ロータ40の回転中心Zrから回転半径R1で描く円弧の曲率よりも大きくなる。
【0047】
ロータヨーク41は、マグネット42をロータヨーク41の外周に設けるために、マグネット42の内周部の円弧の半径r2と同じ半径の円弧となる密着面41aを有している。つまり、マグネット42の密着面41aは、仮想曲線Q2の曲率と同じ曲率となっている。この構造により、マグネット42の内周部は、ロータヨーク41と密着し、隙間を生じることによる磁束漏れのおそれを低減できる。その結果、モータ1は、マグネット42の磁束を有効利用することによりモータトルクの低下を抑制することができる。また、モータ1は、マグネット42とロータヨーク41とが沿うことから、マグネット42の固定を安定させることができる。なお、同じ半径または同じ曲率とは、ある程度の許容範囲(誤差、公差等)を含む。
【0048】
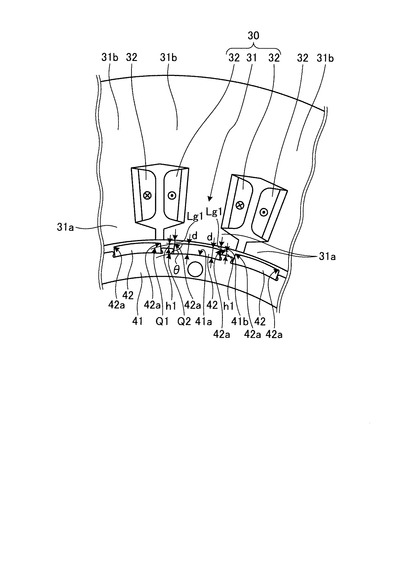
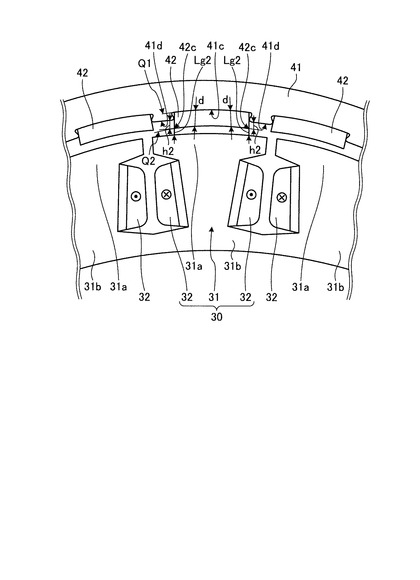
図3は、実施形態1のロータとステータとの関係を模式的に示す説明図である。図3に示すように、マグネット42は、位置決め凸部41b間に収容されるが、ロータヨーク41よりもステータ30側に突出している。このマグネット42の外周側の角部42aにおいて、ステータコア31と、マグネット42との間隔であるギャップ長は、Lg1である。
【0049】
ステータ30は、回転中心Zr側にロータ40を包囲するように筒状に設けられる。図3に示すように、ステータ30は、ステータコア31が上述した回転中心Zrを中心とした円周方向にティース31aが等間隔で並んで、バックヨーク31bが一体に配置される。ステータ30は、このような一体コアに限られず、複数の分割されたステータコア31が上述した回転中心Zrを中心とした円周方向に等間隔で並んで配置される分割コアであってもよい。そして、ステータコア31がハウジングベース21に固定される。
【0050】
また、ステータコア31は、略同形状に形成された複数のティース31aが回転中心Zr方向に積層されて束ねられることで形成される。ステータコア31は、電磁鋼板などの磁性材料で形成される。ステータ30は、複数のステータコア31が組み合わされると、環状形状を形成する。
【0051】
図3に示す励磁コイル32は、線状の電線である。励磁コイル32は、ステータコア31のティース31aにインシュレータを介して集中巻きされる。この構成により、磁極数を低減でき、かつ分布巻きに比較してコイルエンドが短くなることからコイル量を低減できる。その結果、コストを低減でき、モータ1をコンパクトにすることができる。なお、インシュレータは、励磁コイル32とステータコア31とを絶縁するための部材であり、耐熱部材で形成される。
【0052】
励磁コイル32は、ステータコア31のティース31aの複数の外周に分布巻きされていてもよい。この構成により、磁極数が増え、磁束の分布が安定することからトルクリップルを抑制することができる。励磁コイル32は、バックヨーク31bの外周にトロイダル巻きされていてもよい。この構成により、分布巻きと同等の磁束分布を発生することができる。その結果、トルクリップルを抑制することができる。
【0053】
このように構成されたステータコア31が図3に示すように複数組み合わされることにより、ステータ30は、ロータ40を包囲できる形状となる。つまり、ステータコア31は、ロータヨーク41の外側(回転中心Zrから遠い側)にギャップを有して環状に配置される。
【0054】
以上説明したように、実施形態1のモータ1は、ロータヨーク41及びロータヨーク41の外周に設けられて、ロータヨーク41の円周方向に向かって配列される複数のマグネット42を含むロータ40と、ロータ40との間にギャップLg1を有して環状に配置されるステータコア31及びステータコア31を励磁させる励磁コイル32を含むステータ30と、を含む。マグネット42は、マグネット42の外周部の円弧の中心Mrとマグネット42の内周部の円弧の中心Mrとが一致するとともに、マグネット42の外周部または内周部の円弧の中心Mrとロータ40の回転中心Zrとが一致しない。
【0055】
実施形態1のモータ1は、マグネット42の外周部の円弧の中心Mrとマグネット42の内周部の円弧の中心Mrとが一致するので、マグネット42の外周部と内周部との間の厚みdが保たれ、マグネット42の磁石体積低下による総磁束量の低減を抑制することができる。このため、マグネット42の角部42aの磁石体積を確保することができることから、マグネット42の減磁耐力を高めることができる。また、マグネット42の減磁を抑制できることから、ステータ30の励磁コイル32の電気装荷を大きくし、モータ1はモータトルクを増加させることもできる。
【0056】
マグネット42は、仮想曲線Q1の曲率が大きくなっても角部42aの角度θを確保することができる。このため、モータ1の製造過程において、角部42aの割れのおそれを低減することができる。なお、角度θがマグネット42の仮想曲線Q1と角部42aから回転中心Zrへ向かう半径方向とのなす角度である場合、製造装置は、ロータヨーク41の位置決め凸部41bを形成しやすくなる。また、角度θがマグネット42の仮想曲線Q1と角部42aから回転中心Zrへ向かう半径方向とのなす角度である場合、製造装置は、マグネット42をロータヨーク41の外周表面に沿って密に並べる精度を高めることができる。
【0057】
また、マグネット42の外周部または内周部の円弧の中心Mrと、ロータ40の回転中心Zrとが一致しないことから、マグネット42からステータコア31へ鎖交する磁束の変化を滑らかにすることができる。このため、このため、モータ1は、トルク変動を低減でき滑らかな回転が可能となる。そして、モータ1は、マグネット42からステータコア31へ鎖交する磁束が急に増加または減少することに伴うコギングトルク及びトルクリップルを抑制することができる。
【0058】
実施形態1のモータ1は、マグネット42の角部42aからロータヨーク41までの最短距離h1を、上述したギャップ長Lg1以上とする。この構造により、マグネット42の角部42aからステータコア31へ鎖交する磁束の磁気抵抗を、マグネット42の角部42aからロータヨーク41の位置決め凸部41bへ鎖交する磁束の磁気抵抗以下とすることができる。これにより、モータ1は、モータトルクの低下を抑制することができる。
【0059】
以上説明した実施形態1のモータ1は、伝達機構を介在させることなく負荷体52と回転軸12とを直結するダイレクトドライブモータである。上述したように、モータ1は、トルク変動を低減でき滑らかな回転が可能となる。このため、モータ1は、ロータ40とともに回転する回転軸12の回転力を負荷体52にダイレクトに伝達し、負荷体52を回転させても、軸受14の寿命の劣化を抑制することができる。
【0060】
(実施形態2)
図4は、実施形態2のモータの構成を回転中心に直交する仮想平面で切ってロータを模式的に示す部分断面図である。図5は、実施形態2のロータとステータとの関係を模式的に示す説明図である。なお、上述した実施形態で説明したものと同じ構成要素には同一の符号を付して重複する説明は省略する。
【0061】
実施形態2のモータ1は、アウターロータ型と呼ばれ、ステータ30がロータ40よりも回転中心Zr寄りとなる配置としている。
【0062】
マグネット42は、ロータヨーク41の内周表面に沿って貼り付けられ、複数設けられている。マグネット42は、永久磁石であり、S極及びN極がロータヨーク41の円周方向に交互に等間隔で配置される。これにより、図4に示すロータ40の極数は、ロータヨーク41の内周側にN極と、S極とがロータヨーク41の円周方向に交互に配置された28極である。ロータ40の極数は、28極に限られず、例えば20極または36極でもよく、必要に応じて適宜変更できる。
【0063】
ロータヨーク41の内周には、マグネット42を位置決めする位置決め凸部41dが円周方向に複数設けられている。位置決め凸部41d間は、マグネット42を収容する凹部となっており、ロータヨーク41の内周に空けられた溝となる。マグネット42は、マグネット42を収容する凹部の密着面41cに貼り付けられる。マグネット42は、ロータヨーク41の位置決め凸部41d間に収容され、例えば、密着面41cに接着剤により取り付けられる。本実施形態では、マグネット42は、ロータヨーク41の内周表面の密着面41cに沿って貼り付けられ、複数設けられている分割形状(セグメント構造)のセグメント磁石である。
【0064】
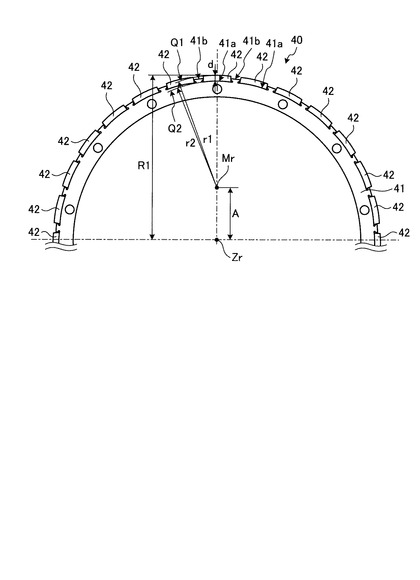
図4において、ロータ40の回転半径R2は、回転中心Zrから半径方向に最も近い距離であるマグネット42の最内周表面までの距離である。マグネット42の半径方向の外周部における回転方向の円弧の半径をr1とする。仮想曲線Q1は、マグネット42の外周部における円弧を延長した曲線である。マグネット42の半径方向の外周部(外周表面)の円弧は、仮想曲線Q1の円弧の中心Mrから半径r1とされている。マグネット42の半径方向の内周部(内周表面)における回転方向の円弧の半径(曲率半径)をr2とする。仮想曲線Q2は、マグネット42の内周部における円弧を延長した曲線である。マグネット42の半径方向の内周部(内周表面)の円弧は、仮想曲線Q2の円弧の中心Mrから半径r2とされている。
【0065】
実施形態2のマグネット42は、仮想曲線Q1の円弧の中心と、仮想曲線Q2の円弧の中心とが同じ中心Mrとなり、一致する。また、仮想曲線Q1の円弧の半径と仮想曲線Q2の円弧の半径は、r1>r2となる。仮想曲線Q1の円弧の中心と、仮想曲線Q2の円弧の中心とが一致するとは、ある程度の許容範囲(誤差、公差等)を含む。
【0066】
この構造により、マグネット42の外周部及び内周部の間であるマグネット42の厚みdは一定となり、部分的に薄い部分が低減されるので、限られたマグネット42の磁石量で必要な磁束を確保することができる。ここで、厚みdは、マグネット42の外周部の起点位置と円弧の中心Mrとを結ぶ直線がマグネット42の内周部(内周表面)に交差した位置と外周部の起点位置との距離である。つまり、外周部の円弧の半径r1と内周部の円弧の半径r2との差が厚みdとなる。
【0067】
また、仮想曲線Q1の円弧の中心Mrと、ロータ40の回転中心Zrとは、重なり合わない。例えば、仮想曲線Q1の円弧の中心Mrは、マグネット42からみて回転中心Zrよりも半径方向に遠い側にシフト量Aだけずれている。シフト量Aのロータ40の回転半径R2に対する比は、例えば百分率で30%となっている。これにより、仮想曲線Q1の曲率は、ロータ40の回転中心Zrから回転半径R2で描く円弧の曲率よりも小さくなる。
【0068】
ロータヨーク41は、マグネット42をロータヨーク41の内周に設けるために、マグネット42の外周部の円弧の半径と同じ半径の円弧となる密着面41cを有している。つまり、マグネット42の密着面41cは、仮想曲線Q1の曲率と同じ曲率となっている。この構造により、マグネット42の外周部は、ロータヨーク41と密着し、隙間を生じることによる磁束漏れのおそれを低減できる。その結果、モータ1は、マグネット42の磁束を有効利用することによりモータトルクの低下を抑制することができる。また、モータ1は、マグネット42とロータヨーク41とが沿うことから、マグネット42の固定を安定させることができる。なお、同じ半径または同じ曲率とは、ある程度の許容範囲(誤差、公差等)を含む。
【0069】
図5に示すように、マグネット42は、位置決め凸部41d間に収容されるが、ロータヨーク41よりもステータ30側に突出している。マグネット42の内周側の角部42cにおいて、ステータコア31と、マグネット42との間隔であるギャップ長は、Lg2である。ステータコア31は、ロータヨーク41の内側(回転中心Zr側)にギャップを有して環状に配置され、ロータ40は、ステータ30を包囲できる形状となる。
【0070】
以上説明したように、実施形態2のモータ1は、ロータヨーク41及びロータヨーク41の内周に設けられて、ロータヨーク41の円周方向に向かって配列される複数のマグネット42を含むロータ40と、ロータ40との間にギャップLg2を有して環状に配置されるステータコア31及びステータコア31を励磁させる励磁コイル32を含むステータ30と、を含む。マグネット42は、マグネット42の外周部の円弧の中心Mrとマグネット42の内周部の円弧の中心Mrとが一致するとともに、マグネット42の外周部または内周部の円弧の中心Mrとロータ40の回転中心Zrとが一致しない。
【0071】
実施形態2のモータ1は、マグネット42の外周部の円弧の中心Mrとマグネット42の内周部の円弧の中心Mrとが一致するので、マグネット42の外周部と内周部との間の厚みdが保たれ、マグネット42の磁石体積低下による総磁束量の低減を抑制することができる。このため、マグネット42の角部42cの磁石体積を確保することができることから、マグネット42の減磁耐力を高めることができる。また、マグネット42の減磁を抑制できることから、ステータ30の励磁コイル32の電気装荷を大きくし、モータ1はモータトルクを増加させることもできる。
【0072】
また、マグネット42の外周部または内周部の円弧の中心Mrと、ロータ40の回転中心Zrとが一致しないことから、ロータヨーク41が回転する場合、マグネット42からステータコア31へ鎖交する磁束の変化を滑らかにすることができる。このため、このため、モータ1は、トルク変動を低減でき滑らかな回転が可能となる。そして、モータ1はマグネット42からステータコア31へ鎖交する磁束が急に増加または減少することに伴うコギングトルク及びトルクリップルを抑制することができる。
【0073】
実施形態2のモータ1は、マグネット42の角部42cからロータヨーク41の位置決め凸部41dまでの最短距離h2を、上述したギャップ長Lg2以上とする。この構造により、マグネット42の角部42cからステータコア31へ鎖交する磁束の磁気抵抗を、マグネット42の角部42cからロータヨーク41へ鎖交する磁束の磁気抵抗以下とすることができる。これにより、モータ1は、モータトルクの低下を抑制することができる。
【0074】
以上説明した実施形態2のモータ1は、伝達機構を介在させることなく負荷体52と回転軸12とを直結するダイレクトドライブモータである。上述したように、モータ1は、トルク変動を低減でき滑らかな回転が可能となる。このため、モータ1は、ロータ40とともに回転する回転軸12の回転力を負荷体52にダイレクトに伝達し、負荷体52を回転させても、軸受14の寿命の劣化を抑制することができる。
【符号の説明】
【0075】
1 モータ
10 モータ回転軸
11 中空部
12 回転軸
13 ロータフランジ
14 軸受
15A、15B レゾルバロータ
16、17、26、27、28 固定部材
20 ベース部材
21 ハウジングベース
22 ハウジングインナ
23 ハウジングフランジ
24A、24B 回転検出器
25A、25B レゾルバステータ
30 ステータ
31 ステータコア
31a ティース
31b バックヨーク
32 励磁コイル
40 ロータ
41 ロータヨーク
41a 密着面
42 マグネット
42a、42c 角部
51 支持部材
52 負荷体
Mr 外周部の中心(内周部の中心)
R1、R2 回転半径
Zr 回転中心
【技術分野】
【0001】
本発明は、モータに関するものである。
【背景技術】
【0002】
特許文献1では、永久磁石における外周面の円弧半径中心の偏芯率を最適な範囲内に設定することによって、永久磁石形モータのコギングトルク及びトルクリップルを低減する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−275285号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のモータでは、磁石外周面の円弧と磁石内周面の円弧とが異なるため、磁石の総体積が低減される。このため、特許文献1に記載の磁石は、磁石の総磁束量が低減する傾向にあり、モータとした場合に、モータトルクが低下するおそれがある。また、磁石外周面の円弧半径中心と磁石内周面の円弧半径中心とが異なるため、磁石は半径方向の厚みに薄い部分が存在し、この薄い部分が反磁界に対して弱くなるおそれがある。このため、磁石が減磁しないように、ステータの電気装荷を大きくすることができず、モータトルクを大きくすることができないおそれがある。
【0005】
本発明は、上記に鑑みてなされたものであって、モータトルクを高めるとともに、トルク変動を低減でき滑らかな回転が可能なモータを提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し目的を達成するために、モータは、ロータヨーク及び前記ロータヨークの外周または内周に設けられて、前記ロータヨークの円周方向に向かって配列される複数のマグネットを含むロータと、前記ロータヨークとの間にギャップを有して環状に配置されるステータコア及び前記ステータコアを励磁させる励磁コイルを含むステータと、を含み、前記マグネットの外周部の円弧の中心と前記マグネットの内周部の円弧の中心とが一致するとともに、前記マグネットの外周部または前記マグネットの内周部の円弧の中心と前記ロータの回転中心とが一致しないことを特徴とする。
【0007】
この構成により、マグネットの内周部と外周部との間での厚みは一定となり、磁石体積低下による総磁束量の低減を抑制することができる。また、モータは、マグネットの減磁耐力を高めることができる。このため、ステータの励磁コイルの電気装荷を大きくし、モータはモータトルクを増加させることもできる。
【0008】
また、上記構成により、マグネットの外周部の円弧の中心またはマグネットの内周部の円弧の中心と、ロータの回転中心とが一致しないことから、マグネットからステータコアへ鎖交する磁束の変化を滑らかにすることができる。このため、モータは、トルク変動を低減でき滑らかな回転が可能となる。そして、モータは、マグネットからステータコアへ鎖交する磁束が急に増加または減少することに伴うコギングトルク及びトルクリップルを抑制することができる。
【0009】
本発明の望ましい態様として、前記ロータヨークは、前記マグネットの外周部の円弧の半径または前記マグネットの内周部の円弧の半径と同じ半径の円弧となる密着面を有していることが好ましい。
【0010】
この構成により、マグネットの外周部または内周部は、ロータヨークと密着し、隙間を生じることによる磁束漏れのおそれを低減できる。その結果、モータは、マグネットの磁束を有効利用することによりモータトルクの低下を抑制することができる。また、モータは、マグネットとロータヨークとが沿うことから、マグネットの固定を安定させることができる。
【0011】
本発明の望ましい態様として、前記マグネットの前記ステータ側に突出している角部から前記ロータヨークまでの最短距離は、前記ギャップの距離以上であることが好ましい。
【0012】
この構成により、マグネットの角部からステータコアへ鎖交する磁束の磁気抵抗を、マグネットの角部からロータヨークへ鎖交する磁束の磁気抵抗以下とすることができる。これにより、モータは、モータトルクの低下を抑制することができる。
【0013】
本発明の望ましい態様として、前記ロータと連動して回転する回転軸をさらに備え、前記回転軸と回転させる負荷体とを直結していることが好ましい。
【0014】
この構成により、モータはいわゆるダイレクトドライブモータとなり、直接負荷体を回転することができる。また、モータは、トルク変動を低減でき滑らかな回転が可能となる。そして、モータは、モータトルクを高めるとともに、コギングトルク及びトルクリップルを低減できるので、回転体を支持する軸受の寿命劣化を抑制することができる。
【発明の効果】
【0015】
本発明によれば、モータトルクを高めるとともに、トルク変動を低減でき滑らかな回転が可能なモータを提供することができる。
【図面の簡単な説明】
【0016】
【図1】図1は、回転中心を含む仮想平面で実施形態1のモータの構成を切って模式的に示す断面図である。
【図2】図2は、実施形態1のモータの構成を回転中心に直交する仮想平面で切ってロータを模式的に示す部分断面図である。
【図3】図3は、実施形態1のロータとステータとの関係を模式的に示す説明図である。
【図4】図4は、実施形態2のモータの構成を回転中心に直交する仮想平面で切ってロータを模式的に示す部分断面図である。
【図5】図5は、実施形態2のロータとステータとの関係を模式的に示す説明図である。
【発明を実施するための形態】
【0017】
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。
【0018】
(実施形態1)
図1は、回転中心を含む仮想平面で実施形態1のモータの構成を切って模式的に示す断面図である。モータ1は、ギヤ、ベルトまたはローラ等の伝達機構を介在させることなく負荷体52に回転力をダイレクトに伝達し、負荷体52を回転させることができる。モータ1は、いわゆるモータ回転軸10と負荷体52とを直結したダイレクトドライブモータである。
【0019】
モータ1は、静止状態に維持される固定子(以下、ステータという)30と、ステータ30に対して回転可能に配置された回転子(以下、ロータという)40と、ステータ30を固定して支持部材51に取り付けられるベース部材20と、ロータ40に固定されてロータ40とともに回転可能なモータ回転軸10と、ベース部材20とモータ回転軸10との間に介在されてモータ回転軸10をベース部材20に対して回転可能に支持する軸受14と、を含む。
【0020】
ベース部材20、モータ回転軸10、ロータ40及びステータ30はいずれも環状の構造体である。モータ回転軸10、ロータ40及びステータ30は、回転中心Zrを中心に同心状に配置されている。また、モータ1は、回転中心Zrから外側へロータ40、ステータ30の順に配置されている。このようなモータ1は、インナーロータ型と呼ばれ、ロータ40がステータ30よりも回転中心Zr寄りとなる。また、モータ1は、モータ回転軸10、ロータ40及びステータ30がベース部材20の上に配置されている。
【0021】
ベース部材20は、略円板状のハウジングベース21と、中空部11が貫通し、中空部11を囲むようにハウジングベース21から凸状に突出した軸心となるハウジングインナ22を備えている。ハウジングインナ22は、ハウジングベース21にボルト等の固定部材27を介して締結され固定されている。また、ベース部材20は、ボルト等の固定部材26を介してハウジングベース21に軸受14の内輪を固定するハウジングフランジ23とを含む。
【0022】
ハウジングベース21の外周縁には、ステータ30がボルト等の固定部材28によって締結されている。これにより、ステータ30はハウジングベース21に対して位置決め固定されている。ステータ30の中心軸は、ロータ40の回転中心Zrと一致する。
【0023】
ステータ30は、筒状のステータコア31と、励磁コイル32とを含む。ステータ30は、ステータコア31に励磁コイル32が巻きつけられる。ステータ30には、電源からの電力を供給するための配線(図示しない)が接続されており、この配線を通じて励磁コイル32に対して電力が供給されるようになっている。
【0024】
ロータ40は、ロータ40の外径がステータ30の内径寸法も小さな円筒状である。ロータ40は、ロータヨーク41及びロータヨーク41の外周に貼り付けられたマグネット42を含む。なお、マグネット42については、後述する。
【0025】
モータ回転軸10は、円環状の回転軸12と、ボルト等の固定部材16を介して回転軸12に軸受14の外輪を固定するロータフランジ13とを含む。ロータ40は、円筒状のモータ回転軸10の回転軸12に一体的に固定されている。ロータ40は、円筒状のモータ回転軸10の回転軸12に固定部材により固定されてもよい。回転軸12は、円環の中心軸がモータ1の回転中心Zrと同軸に形成されている。
【0026】
また、軸受14は、外輪がロータフランジ13に固定され、内輪がハウジングフランジ23に固定されている。これにより、軸受14は、ハウジングベース21に対して、回転軸12及びロータ40を回転自在に支持することができる。このため、モータ1は、回転軸12及びロータ40をハウジングベース21及びステータ30に対して回転させることができる。
【0027】
なお、軸受14は、転動体をクロスローラとしたクロスローラ軸受としてもよい。なお、軸受14は、クロスローラ軸受に限定されず、例えば転動体を玉やころ(円筒ころ、円錐ころ、球面ころなど)とした玉軸受やころ軸受としてもよい。これらの転動体は、環状を成す保持器のポケットに1つずつ所定間隔、例えば等間隔で配列し、このポケット内で回転自在に保持された状態で軌道面間に組み込んでもよい。これにより、各転動体は所定間隔を保った状態で、その転動面が相互に接触することなく、上記軌道面間を転動することができる。また、各転動体は、相互に接触して摩擦が生じることによる回転抵抗の増大や、焼付きなどを防止することができる。
【0028】
軸受14は、例えば転動体を玉とした場合、保持器を波型の合わせタイプや冠型などとすることができる。または、軸受14は、転動体を各種のころとした場合、保持器をもみ抜き型、くし型及びかご型などとすることができる。
【0029】
また、モータ1は、回転検出器24A、24Bを備えることが好ましい。回転検出器24A、24Bは、例えばレゾルバであって、ロータ40及びモータ回転軸10の回転位置を高精度に検出することができる。
【0030】
回転検出器24A、24Bは、静止状態に維持されるレゾルバステータ25A、25Bと、レゾルバステータ25A、25Bと所定のギャップを隔てて対向配置され、レゾルバステータ25A、25Bに対して回転可能なレゾルバロータ15A、15Bを備えており、軸受14の上方に配設されている。
【0031】
レゾルバステータ25A、25Bは、複数のステータ磁極が円周方向に等間隔に形成された環状の積層鉄心を有し、各ステータ磁極にレゾルバコイルが巻回されている。本実施形態のモータ1では、レゾルバステータ25A、25Bは、ハウジングインナ22に固定されている。
【0032】
レゾルバロータ15A、15Bは、中空環状の積層鉄心により構成されており、モータ回転軸10の内側に固定されている。回転検出器24A、24Bの配設位置は、ロータ40(モータ回転軸10)の回転を検出することが可能であれば特に限定されず、モータ回転軸10及びベース部材20の形状に応じて任意の位置へ配設することができる。
【0033】
ロータ40が回転すると、ロータ40とともにモータ回転軸10が回転し、連動してレゾルバロータ15A、15Bも回転する。これにより、レゾルバロータ15A、15Bと、レゾルバステータ25A、25Bとの間のリラクタンスが連続的に変化する。レゾルバステータ25A、25Bは、リラクタンスの変化を検出し、レゾルバ制御回路によって電気信号(デジタル信号)に変換する。モータ1を制御する制御装置は、レゾルバ制御回路の電気信号に基づいて、単位時間当たりのレゾルバロータ15A、15Bと連動するモータ回転軸10及びロータ40の位置や回転角度を演算処理することができる。その結果、モータ1を制御する制御装置は、モータ回転軸10の回転状態(例えば、回転速度、回転方向あるいは回転角度など)を計測することが可能となる。
【0034】
なお、上述したレゾルバロータ15Aは、中空部11に対して偏心させた内周を有する円環状となっている。このため、ロータ40の回転に伴ってレゾルバロータ15Aが回転すると、レゾルバステータ25Aとの間の距離を円周方向に連続して変化させ、両者の間のリラクタンスがレゾルバロータ15Aの位置により連続的に変化する。レゾルバロータ15Aの1回転につき、リラクタンス変化の基本波成分が1周期となる単極レゾルバ信号を出力しており、回転検出器24Aはいわゆる単極レゾルバとなる。
【0035】
また、レゾルバロータ15Bは、突極状の複数の歯が円周方向に等間隔で形成される。このため、ロータ40の回転に伴ってレゾルバロータ15Bが回転すると、レゾルバステータ25Bとの間の距離を円周方向に周期的に変化させ、両者の間のリラクタンスがレゾルバロータ15Bの歯の位置により連続的に変化する。レゾルバロータ15Bの1回転につき、リラクタンス変化の基本波成分が多周期となる多極レゾルバ信号を出力しており、回転検出器24Bはいわゆる多極レゾルバとなる。
【0036】
このように、モータ1は、ロータ40の1回転につき、リラクタンス変化の基本波成分の周期が異なる回転検出器24A及び回転検出器24Bを備えることにより、モータ回転軸10の絶対位置を把握することができ、また、モータ回転軸10の回転状態(例えば、回転速度、回転方向あるいは回転角度など)を計測する精度を高めることができる。
【0037】
モータ1は、ハウジングベース21が支持部材51に取り付けられることで、支持部材51に対して位置決め固定される。ハウジングベース21は、支持部材51に取り付けられた状態において、支持部材51の取付面と接する一連の連続面を少なくとも1つ有している。この連続面は、モータ1の自重や回転時の振動などを支持部材51に分散して作用させることができる。このため、ハウジングベース21に歪み(撓み)が生ずるおそれを防止することができる。
【0038】
モータ1は、例えばボルト等の固定部材17により負荷体52が回転軸12に直接固定されている。負荷体52の質量が大きい場合、モータ1は、モータトルクを十分備えている必要がある。また、モータ1は、ロータ40の回転にコギングトルク及びトルクリップルを含んでいると、回転軸12の振動を生じさせるおそれがある。回転軸12の振動は、負荷体52に伝達される。これにより、負荷体52の重心が振れるようにモーメントがかかる場合、モータ1の軸受14の寿命を短くしてしまうおそれがある。
【0039】
以上説明したように、モータ1は、伝達機構を介在させることなく負荷体52に回転力をダイレクトに伝達できる。このため、負荷体52を回転させる場合、モータ1は、モータトルクを高めるとともに、コギングトルク及びトルクリップルを低減することが求められる。
【0040】
図2は、実施形態1のモータの構成を回転中心に直交する仮想平面で切ってロータを模式的に示す部分断面図である。図2は、例えば図1のII−II断面を視ている。図2に示すように、ロータ40は、ロータヨーク41と、マグネット42とを含む。ロータヨーク41は、筒状に形成される。ロータヨーク41は、電磁鋼板、冷間圧延鋼板などの薄板が、接着、ボス、カシメなどの手段により積層されて製造される。例えば、ロータヨーク41は、順次金型の型内で積層され、金型から排出される。
【0041】
マグネット42は、ロータヨーク41の外周表面に沿って貼り付けられ、複数設けられている。マグネット42は、永久磁石であり、S極及びN極がロータヨーク41の円周方向に交互に等間隔で配置される。これにより、図2に示すロータ40の極数は、ロータヨーク41の外周側にN極と、S極とがロータヨーク41の円周方向に交互に配置された28極である。なお、ロータ40の極数は、28極に限られず、例えば20極または36極でもよく、必要に応じて適宜変更できる。また、永久磁石は、例えばNd−Fe−B系磁石を用いることができる。
【0042】
ロータヨーク41の外周には、マグネット42を位置決めする位置決め凸部41bが円周方向に複数設けられている。位置決め凸部41b間は、マグネット42を収容する凹部となっており、ロータヨーク41の外周に空けられた溝となる。マグネット42は、マグネット42を収容する凹部の密着面41aに貼り付けられる。マグネット42は、ロータヨーク41の位置決め凸部41b間に収容され、例えば、密着面41aに接着剤により取り付けられる。本実施形態では、マグネット42は、ロータヨーク41の外周表面の密着面41aに沿って貼り付けられ、複数設けられている分割形状(セグメント構造)のセグメント磁石である。
【0043】
図2において、ロータ40の回転半径R1は、回転中心Zrから半径方向に最も遠い距離であるマグネット42の最外周表面までの距離である。マグネット42の半径方向の外周部(外周表面)における回転方向の円弧の半径(曲率半径)をr1とする。仮想曲線Q1は、マグネット42の外周部における円弧を延長した曲線である。マグネット42の半径方向の外周部(外周表面)の円弧は、仮想曲線Q1の円弧の中心Mrから半径r1とされている。マグネット42の半径方向の内周部(内周表面)における回転方向の円弧の半径(曲率半径)をr2とする。仮想曲線Q2は、マグネット42の内周部における円弧を延長した曲線である。マグネット42の半径方向の内周部(内周表面)の円弧は、仮想曲線Q2の円弧の中心Mrから半径r2とされている。
【0044】
実施形態1のマグネット42は、仮想曲線Q1の円弧の中心と、仮想曲線Q2の円弧の中心とが同じ中心Mrとなり、一致する。また、仮想曲線Q1の円弧の半径r1と仮想曲線Q2の円弧の半径r2は、r1>r2の関係となる。なお、マグネット42の外周部とは、マグネット42の回転中心Zrから遠い側の表面をいい、マグネット42の内周部とは、マグネット42の回転中心Zrから近い側の表面をいう。仮想曲線Q1の円弧の中心と、仮想曲線Q2の円弧の中心とが一致するとは、ある程度の許容範囲(誤差、公差等)を含む。
【0045】
この構造により、マグネット42の外周部及び内周部の間であるマグネット42の厚みdは一定となり、部分的に薄い部分が低減されるので、限られたマグネット42の磁石量で必要な磁束を確保することができる。ここで、厚みdは、マグネット42の外周部の起点位置と円弧の中心Mrとを結ぶ直線がマグネット42の内周部(内周表面)に交差した位置と外周部の起点位置との距離である。つまり、外周部の円弧の半径r1と内周部の円弧の半径r2との差が厚みdとなる。
【0046】
また、仮想曲線Q1の円弧の中心Mrと、ロータ40の回転中心Zrとは、重なり合わない。例えば、仮想曲線Q1の円弧の中心Mrは、マグネット42からみて回転中心Zrよりも半径方向に近い側にシフト量Aだけずれている。シフト量Aのロータ40の回転半径R1に対する比は、例えば百分率で30%となっている。これにより、仮想曲線Q1の曲率は、ロータ40の回転中心Zrから回転半径R1で描く円弧の曲率よりも大きくなる。
【0047】
ロータヨーク41は、マグネット42をロータヨーク41の外周に設けるために、マグネット42の内周部の円弧の半径r2と同じ半径の円弧となる密着面41aを有している。つまり、マグネット42の密着面41aは、仮想曲線Q2の曲率と同じ曲率となっている。この構造により、マグネット42の内周部は、ロータヨーク41と密着し、隙間を生じることによる磁束漏れのおそれを低減できる。その結果、モータ1は、マグネット42の磁束を有効利用することによりモータトルクの低下を抑制することができる。また、モータ1は、マグネット42とロータヨーク41とが沿うことから、マグネット42の固定を安定させることができる。なお、同じ半径または同じ曲率とは、ある程度の許容範囲(誤差、公差等)を含む。
【0048】
図3は、実施形態1のロータとステータとの関係を模式的に示す説明図である。図3に示すように、マグネット42は、位置決め凸部41b間に収容されるが、ロータヨーク41よりもステータ30側に突出している。このマグネット42の外周側の角部42aにおいて、ステータコア31と、マグネット42との間隔であるギャップ長は、Lg1である。
【0049】
ステータ30は、回転中心Zr側にロータ40を包囲するように筒状に設けられる。図3に示すように、ステータ30は、ステータコア31が上述した回転中心Zrを中心とした円周方向にティース31aが等間隔で並んで、バックヨーク31bが一体に配置される。ステータ30は、このような一体コアに限られず、複数の分割されたステータコア31が上述した回転中心Zrを中心とした円周方向に等間隔で並んで配置される分割コアであってもよい。そして、ステータコア31がハウジングベース21に固定される。
【0050】
また、ステータコア31は、略同形状に形成された複数のティース31aが回転中心Zr方向に積層されて束ねられることで形成される。ステータコア31は、電磁鋼板などの磁性材料で形成される。ステータ30は、複数のステータコア31が組み合わされると、環状形状を形成する。
【0051】
図3に示す励磁コイル32は、線状の電線である。励磁コイル32は、ステータコア31のティース31aにインシュレータを介して集中巻きされる。この構成により、磁極数を低減でき、かつ分布巻きに比較してコイルエンドが短くなることからコイル量を低減できる。その結果、コストを低減でき、モータ1をコンパクトにすることができる。なお、インシュレータは、励磁コイル32とステータコア31とを絶縁するための部材であり、耐熱部材で形成される。
【0052】
励磁コイル32は、ステータコア31のティース31aの複数の外周に分布巻きされていてもよい。この構成により、磁極数が増え、磁束の分布が安定することからトルクリップルを抑制することができる。励磁コイル32は、バックヨーク31bの外周にトロイダル巻きされていてもよい。この構成により、分布巻きと同等の磁束分布を発生することができる。その結果、トルクリップルを抑制することができる。
【0053】
このように構成されたステータコア31が図3に示すように複数組み合わされることにより、ステータ30は、ロータ40を包囲できる形状となる。つまり、ステータコア31は、ロータヨーク41の外側(回転中心Zrから遠い側)にギャップを有して環状に配置される。
【0054】
以上説明したように、実施形態1のモータ1は、ロータヨーク41及びロータヨーク41の外周に設けられて、ロータヨーク41の円周方向に向かって配列される複数のマグネット42を含むロータ40と、ロータ40との間にギャップLg1を有して環状に配置されるステータコア31及びステータコア31を励磁させる励磁コイル32を含むステータ30と、を含む。マグネット42は、マグネット42の外周部の円弧の中心Mrとマグネット42の内周部の円弧の中心Mrとが一致するとともに、マグネット42の外周部または内周部の円弧の中心Mrとロータ40の回転中心Zrとが一致しない。
【0055】
実施形態1のモータ1は、マグネット42の外周部の円弧の中心Mrとマグネット42の内周部の円弧の中心Mrとが一致するので、マグネット42の外周部と内周部との間の厚みdが保たれ、マグネット42の磁石体積低下による総磁束量の低減を抑制することができる。このため、マグネット42の角部42aの磁石体積を確保することができることから、マグネット42の減磁耐力を高めることができる。また、マグネット42の減磁を抑制できることから、ステータ30の励磁コイル32の電気装荷を大きくし、モータ1はモータトルクを増加させることもできる。
【0056】
マグネット42は、仮想曲線Q1の曲率が大きくなっても角部42aの角度θを確保することができる。このため、モータ1の製造過程において、角部42aの割れのおそれを低減することができる。なお、角度θがマグネット42の仮想曲線Q1と角部42aから回転中心Zrへ向かう半径方向とのなす角度である場合、製造装置は、ロータヨーク41の位置決め凸部41bを形成しやすくなる。また、角度θがマグネット42の仮想曲線Q1と角部42aから回転中心Zrへ向かう半径方向とのなす角度である場合、製造装置は、マグネット42をロータヨーク41の外周表面に沿って密に並べる精度を高めることができる。
【0057】
また、マグネット42の外周部または内周部の円弧の中心Mrと、ロータ40の回転中心Zrとが一致しないことから、マグネット42からステータコア31へ鎖交する磁束の変化を滑らかにすることができる。このため、このため、モータ1は、トルク変動を低減でき滑らかな回転が可能となる。そして、モータ1は、マグネット42からステータコア31へ鎖交する磁束が急に増加または減少することに伴うコギングトルク及びトルクリップルを抑制することができる。
【0058】
実施形態1のモータ1は、マグネット42の角部42aからロータヨーク41までの最短距離h1を、上述したギャップ長Lg1以上とする。この構造により、マグネット42の角部42aからステータコア31へ鎖交する磁束の磁気抵抗を、マグネット42の角部42aからロータヨーク41の位置決め凸部41bへ鎖交する磁束の磁気抵抗以下とすることができる。これにより、モータ1は、モータトルクの低下を抑制することができる。
【0059】
以上説明した実施形態1のモータ1は、伝達機構を介在させることなく負荷体52と回転軸12とを直結するダイレクトドライブモータである。上述したように、モータ1は、トルク変動を低減でき滑らかな回転が可能となる。このため、モータ1は、ロータ40とともに回転する回転軸12の回転力を負荷体52にダイレクトに伝達し、負荷体52を回転させても、軸受14の寿命の劣化を抑制することができる。
【0060】
(実施形態2)
図4は、実施形態2のモータの構成を回転中心に直交する仮想平面で切ってロータを模式的に示す部分断面図である。図5は、実施形態2のロータとステータとの関係を模式的に示す説明図である。なお、上述した実施形態で説明したものと同じ構成要素には同一の符号を付して重複する説明は省略する。
【0061】
実施形態2のモータ1は、アウターロータ型と呼ばれ、ステータ30がロータ40よりも回転中心Zr寄りとなる配置としている。
【0062】
マグネット42は、ロータヨーク41の内周表面に沿って貼り付けられ、複数設けられている。マグネット42は、永久磁石であり、S極及びN極がロータヨーク41の円周方向に交互に等間隔で配置される。これにより、図4に示すロータ40の極数は、ロータヨーク41の内周側にN極と、S極とがロータヨーク41の円周方向に交互に配置された28極である。ロータ40の極数は、28極に限られず、例えば20極または36極でもよく、必要に応じて適宜変更できる。
【0063】
ロータヨーク41の内周には、マグネット42を位置決めする位置決め凸部41dが円周方向に複数設けられている。位置決め凸部41d間は、マグネット42を収容する凹部となっており、ロータヨーク41の内周に空けられた溝となる。マグネット42は、マグネット42を収容する凹部の密着面41cに貼り付けられる。マグネット42は、ロータヨーク41の位置決め凸部41d間に収容され、例えば、密着面41cに接着剤により取り付けられる。本実施形態では、マグネット42は、ロータヨーク41の内周表面の密着面41cに沿って貼り付けられ、複数設けられている分割形状(セグメント構造)のセグメント磁石である。
【0064】
図4において、ロータ40の回転半径R2は、回転中心Zrから半径方向に最も近い距離であるマグネット42の最内周表面までの距離である。マグネット42の半径方向の外周部における回転方向の円弧の半径をr1とする。仮想曲線Q1は、マグネット42の外周部における円弧を延長した曲線である。マグネット42の半径方向の外周部(外周表面)の円弧は、仮想曲線Q1の円弧の中心Mrから半径r1とされている。マグネット42の半径方向の内周部(内周表面)における回転方向の円弧の半径(曲率半径)をr2とする。仮想曲線Q2は、マグネット42の内周部における円弧を延長した曲線である。マグネット42の半径方向の内周部(内周表面)の円弧は、仮想曲線Q2の円弧の中心Mrから半径r2とされている。
【0065】
実施形態2のマグネット42は、仮想曲線Q1の円弧の中心と、仮想曲線Q2の円弧の中心とが同じ中心Mrとなり、一致する。また、仮想曲線Q1の円弧の半径と仮想曲線Q2の円弧の半径は、r1>r2となる。仮想曲線Q1の円弧の中心と、仮想曲線Q2の円弧の中心とが一致するとは、ある程度の許容範囲(誤差、公差等)を含む。
【0066】
この構造により、マグネット42の外周部及び内周部の間であるマグネット42の厚みdは一定となり、部分的に薄い部分が低減されるので、限られたマグネット42の磁石量で必要な磁束を確保することができる。ここで、厚みdは、マグネット42の外周部の起点位置と円弧の中心Mrとを結ぶ直線がマグネット42の内周部(内周表面)に交差した位置と外周部の起点位置との距離である。つまり、外周部の円弧の半径r1と内周部の円弧の半径r2との差が厚みdとなる。
【0067】
また、仮想曲線Q1の円弧の中心Mrと、ロータ40の回転中心Zrとは、重なり合わない。例えば、仮想曲線Q1の円弧の中心Mrは、マグネット42からみて回転中心Zrよりも半径方向に遠い側にシフト量Aだけずれている。シフト量Aのロータ40の回転半径R2に対する比は、例えば百分率で30%となっている。これにより、仮想曲線Q1の曲率は、ロータ40の回転中心Zrから回転半径R2で描く円弧の曲率よりも小さくなる。
【0068】
ロータヨーク41は、マグネット42をロータヨーク41の内周に設けるために、マグネット42の外周部の円弧の半径と同じ半径の円弧となる密着面41cを有している。つまり、マグネット42の密着面41cは、仮想曲線Q1の曲率と同じ曲率となっている。この構造により、マグネット42の外周部は、ロータヨーク41と密着し、隙間を生じることによる磁束漏れのおそれを低減できる。その結果、モータ1は、マグネット42の磁束を有効利用することによりモータトルクの低下を抑制することができる。また、モータ1は、マグネット42とロータヨーク41とが沿うことから、マグネット42の固定を安定させることができる。なお、同じ半径または同じ曲率とは、ある程度の許容範囲(誤差、公差等)を含む。
【0069】
図5に示すように、マグネット42は、位置決め凸部41d間に収容されるが、ロータヨーク41よりもステータ30側に突出している。マグネット42の内周側の角部42cにおいて、ステータコア31と、マグネット42との間隔であるギャップ長は、Lg2である。ステータコア31は、ロータヨーク41の内側(回転中心Zr側)にギャップを有して環状に配置され、ロータ40は、ステータ30を包囲できる形状となる。
【0070】
以上説明したように、実施形態2のモータ1は、ロータヨーク41及びロータヨーク41の内周に設けられて、ロータヨーク41の円周方向に向かって配列される複数のマグネット42を含むロータ40と、ロータ40との間にギャップLg2を有して環状に配置されるステータコア31及びステータコア31を励磁させる励磁コイル32を含むステータ30と、を含む。マグネット42は、マグネット42の外周部の円弧の中心Mrとマグネット42の内周部の円弧の中心Mrとが一致するとともに、マグネット42の外周部または内周部の円弧の中心Mrとロータ40の回転中心Zrとが一致しない。
【0071】
実施形態2のモータ1は、マグネット42の外周部の円弧の中心Mrとマグネット42の内周部の円弧の中心Mrとが一致するので、マグネット42の外周部と内周部との間の厚みdが保たれ、マグネット42の磁石体積低下による総磁束量の低減を抑制することができる。このため、マグネット42の角部42cの磁石体積を確保することができることから、マグネット42の減磁耐力を高めることができる。また、マグネット42の減磁を抑制できることから、ステータ30の励磁コイル32の電気装荷を大きくし、モータ1はモータトルクを増加させることもできる。
【0072】
また、マグネット42の外周部または内周部の円弧の中心Mrと、ロータ40の回転中心Zrとが一致しないことから、ロータヨーク41が回転する場合、マグネット42からステータコア31へ鎖交する磁束の変化を滑らかにすることができる。このため、このため、モータ1は、トルク変動を低減でき滑らかな回転が可能となる。そして、モータ1はマグネット42からステータコア31へ鎖交する磁束が急に増加または減少することに伴うコギングトルク及びトルクリップルを抑制することができる。
【0073】
実施形態2のモータ1は、マグネット42の角部42cからロータヨーク41の位置決め凸部41dまでの最短距離h2を、上述したギャップ長Lg2以上とする。この構造により、マグネット42の角部42cからステータコア31へ鎖交する磁束の磁気抵抗を、マグネット42の角部42cからロータヨーク41へ鎖交する磁束の磁気抵抗以下とすることができる。これにより、モータ1は、モータトルクの低下を抑制することができる。
【0074】
以上説明した実施形態2のモータ1は、伝達機構を介在させることなく負荷体52と回転軸12とを直結するダイレクトドライブモータである。上述したように、モータ1は、トルク変動を低減でき滑らかな回転が可能となる。このため、モータ1は、ロータ40とともに回転する回転軸12の回転力を負荷体52にダイレクトに伝達し、負荷体52を回転させても、軸受14の寿命の劣化を抑制することができる。
【符号の説明】
【0075】
1 モータ
10 モータ回転軸
11 中空部
12 回転軸
13 ロータフランジ
14 軸受
15A、15B レゾルバロータ
16、17、26、27、28 固定部材
20 ベース部材
21 ハウジングベース
22 ハウジングインナ
23 ハウジングフランジ
24A、24B 回転検出器
25A、25B レゾルバステータ
30 ステータ
31 ステータコア
31a ティース
31b バックヨーク
32 励磁コイル
40 ロータ
41 ロータヨーク
41a 密着面
42 マグネット
42a、42c 角部
51 支持部材
52 負荷体
Mr 外周部の中心(内周部の中心)
R1、R2 回転半径
Zr 回転中心
【特許請求の範囲】
【請求項1】
ロータヨーク及び前記ロータヨークの外周または内周に設けられて、前記ロータヨークの円周方向に向かって配列される複数のマグネットを含むロータと、
前記ロータヨークとの間にギャップを有して環状に配置されるステータコア及び前記ステータコアを励磁させる励磁コイルを含むステータと、
を含み、
前記マグネットの外周部の円弧の中心と前記マグネットの内周部の円弧の中心とが一致するとともに、前記マグネットの外周部または前記マグネットの内周部の円弧の中心と前記ロータの回転中心とが一致しないことを特徴とするモータ。
【請求項2】
前記ロータヨークは、前記マグネットの外周部の円弧の半径または前記マグネットの内周部の円弧の半径と同じ半径の円弧となる密着面を有している請求項1に記載のモータ。
【請求項3】
前記マグネットの前記ステータ側に突出している角部から前記ロータヨークまでの最短距離は、前記ギャップの距離以上である請求項1又は請求項2に記載のモータ。
【請求項4】
前記ロータと連動して回転する回転軸をさらに備え、
前記回転軸と回転させる負荷体とを直結している請求項1から請求項3のいずれか1項に記載のモータ。
【請求項1】
ロータヨーク及び前記ロータヨークの外周または内周に設けられて、前記ロータヨークの円周方向に向かって配列される複数のマグネットを含むロータと、
前記ロータヨークとの間にギャップを有して環状に配置されるステータコア及び前記ステータコアを励磁させる励磁コイルを含むステータと、
を含み、
前記マグネットの外周部の円弧の中心と前記マグネットの内周部の円弧の中心とが一致するとともに、前記マグネットの外周部または前記マグネットの内周部の円弧の中心と前記ロータの回転中心とが一致しないことを特徴とするモータ。
【請求項2】
前記ロータヨークは、前記マグネットの外周部の円弧の半径または前記マグネットの内周部の円弧の半径と同じ半径の円弧となる密着面を有している請求項1に記載のモータ。
【請求項3】
前記マグネットの前記ステータ側に突出している角部から前記ロータヨークまでの最短距離は、前記ギャップの距離以上である請求項1又は請求項2に記載のモータ。
【請求項4】
前記ロータと連動して回転する回転軸をさらに備え、
前記回転軸と回転させる負荷体とを直結している請求項1から請求項3のいずれか1項に記載のモータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−102604(P2013−102604A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244556(P2011−244556)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]