
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】マルチパスの影響でMIIP質問に対し、モードS応答を返送しないリアル機からモードS応答を返送できるようにした二次監視レーダ装置を提供する。
【解決手段】制御装置16において、モードSレーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴースト機やリアル機からモードA/Cによる応答信号を返送させることで、反射物の反射によりゴースト機GTがロールコールに移行しているか否かを確認し、異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致する場合に、モードSによるオールコール質問に応答信号を返送されない目標方向に対し、SLOスキャンを実行し、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
【解決手段】制御装置16において、モードSレーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴースト機やリアル機からモードA/Cによる応答信号を返送させることで、反射物の反射によりゴースト機GTがロールコールに移行しているか否かを確認し、異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致する場合に、モードSによるオールコール質問に応答信号を返送されない目標方向に対し、SLOスキャンを実行し、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば航空管制用レーダ装置に用いられるモードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法に関する。
【背景技術】
【0002】
航空管制用の二次監視レーダ装置は、例えば特許文献1に示されているように、質問信号を航空機上のトランスポンダ(応答装置)に送信し、このトランスポンダにより復号された質問信号に対応する応答信号を受信することによって航空機の識別を行なうものである。この場合、モノパルス測角方式により航空機の距離及び方位を求めている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−249291号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記二次監視レーダ装置を用いるレーダ地上局では、監視領域に進入する航空機に対しモードSのオールコールによる質問信号を送出し、この質問に対し返送される応答信号を受信した航空機に対し個別に質問信号を送出するロールコールを実行することで航空機の追跡を行うようにしている。また、モードSを有する二次監視レーダ装置において、モードA/C質問には応答するが、モードS質問に応答しない航空機の存在が明らかになり、地上側における対策として、モードSトランスポンダからモードA/C、モードS両方の応答を引き出すことにより、モードS質問には応答せずとも、モードA/C応答に基づく航空機監視を可能とするMIIP(Mode S Intermediate Interrogation Pattern)機能がある。
【0005】
マルチパスの影響がある状態でMIIP質問をすると、マルチパスの影響でゴースト機が先にロールコールに移行すると、リアル機の方向でオールコール質問してもロックアウトがかかっているため、オールコール応答を返さないのでリアル機がモードA/C質問には応答するが、モードS質問には応答しないで本来モードS搭載機であるにもかかわらずモードSとして検出できない。
【0006】
そこで、この発明の目的は、マルチパスの影響でMIIP質問に対し、モードS応答を返送しないリアル機からモードS応答を返送できるようにした二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、この発明に係る二次監視レーダ装置は、レーダ地上局に備えられ、当該レーダ地上局がカバーする監視領域内に進入する目標対象物に対しモードSで規定されるオールコール質問信号を送出し、このオールコール質問に対し返送される応答信号を受信した目標対象物に対し個別に質問信号を送出するロールコールを実行することで目標追跡を行うモードSを有する二次監視レーダ装置において、モードSによるオールコール質問を行うとともに、モードA/Cによる質問を行い、モードSによるオールコール質問に応答信号を返送しないロックアウトが設定された目標対象物に対しモードA/Cの質問に応答信号を返送させるMIIP(Mode S Intermediate Interrogation Pattern)モードの質問をレーダ地上局がカバーする監視領域の少なくとも一部で実行するMIIP質問実行手段と、このMIIP質問実行手段によるMIIPモードの質問信号に対し、互いに異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致するか否かを判定する判定手段と、この判定手段によりモードAアドレスが一致すると判定された場合に、モードSによるオールコール質問に応答信号が返送されない目標位置に対し、ロックアウトが設定された目標対象物に対しロックアウト無視の指示を出して応答確率を所定値より下げる質問を行うロックアウトオーバライドオールコール走査を実行する走査実行手段と、ロックアウトオーバライドオールコール走査で返送された応答信号をリアル応答として検出するリアル応答検出手段とを備えるようにしたものである。
【0008】
この構成によれば、レーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつ目標対象物からモードA/Cによる応答信号を返送させることで、マルチパスの影響によりゴースト機がロールコールに移行しているか否かを確認することができ、異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致する場合に、モードSによるオールコール質問に応答信号を返送されない目標方向に対し、ロックアウトオーバライドオールコール走査(以下、SLO走査と略す)を実行し、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
【0009】
従って、反射物の反射によりモードSリアル機を検出できなかった場合であっても、MIIP質問に対しモードS応答を返送しない目標方位にSLO質問することでリアル機の検出を可能にすることができる。
【発明の効果】
【0010】
上記発明によれば、マルチパスの影響でMIIP質問に対し、モードS応答を返送しないリアル機からモードS応答を返送できるようにした二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法を提供することができる。
【図面の簡単な説明】
【0011】
【図1】この発明の一実施形態のモードSを有する二次監視レーダ装置における通常動作時の監視システムを示す図。
【図2】MIIPモード動作時の監視システムを示す図。
【図3】この発明において、モードSレーダ地上局における目標の検出動作を示す図。
【図4】この発明において、SLO質問を行うタイミングを示す図。
【図5】この発明に係るモードSを有する二次監視レーダ装置の一実施形態の構成を示すブロック図。
【図6】上記図5に示したメモリの記憶内容の一例を示す図。
【図7】同実施形態における制御装置の処理手順を示すフローチャート。
【発明を実施するための形態】
【0012】
以下、この発明の実施形態について図面を参照して詳細に説明する。
まず、この発明に係る実施形態を説明するに先立ち、その動作原理について説明する。
【0013】
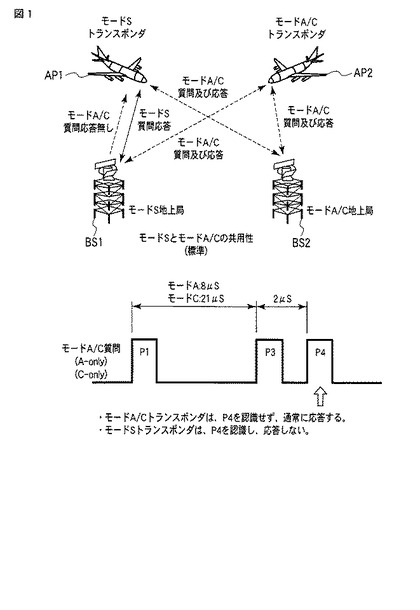
図1は、この発明の一実施形態のモードSを有する二次監視レーダ装置における通常動作時の監視システムを示す図である。図2は、MIIP(Mode S Intermediate Interrogation Pattern)モード動作時の監視システムを示す図である。
【0014】
本実施形態のMIIPモードでは、従来のモードSモードのシステムでは使用しなかったP4パルスが無いモノパルス形式の質問(モードA/C質問)とモードSオールコール質問/ロールコール質問とを交互に行う方式が採用される。また、本システムによりモードS航空機AP1もモードA/C応答することとなる。
【0015】
通常動作時は、図1に示すように、質問を受けて折り返す動作を行うモードS航空機AP1に搭載されたモードS対応トランスポンダ、同様に非モードS航空機AP2に搭載されたモードS非対応トランスポンダと、各トランスポンダに送信するそれぞれモードSオールコール質問/ロールコール質問及びモードA/C質問(P4パルス有り)のパルス変調信号の生成処理、及び、モードS対応トランスポンダからのモードSオールコール質問/ロールコール質問に対するモードS応答、モードS非対応トランスポンダからのモードA/C質問に対する応答の受信処理を行うモードS地上局BS1とモードA/C地上局BS2とから構成される。
【0016】
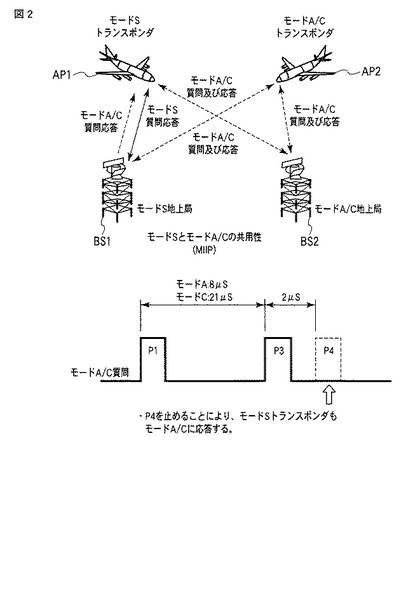
MIIPモード動作時は、図2に示すように、質問を受けて折り返す動作を行うモードS航空機AP1に搭載されたモードS対応トランスポンダ、同様に非モードS航空機AP2に搭載されたモードS非対応トランスポンダと、各トランスポンダに送信するそれぞれモードSオールコール質問/ロールコール質問及びモードA/C質問(P4パルス無し)のパルス変調信号の生成処理、及び、モードS対応トランスポンダからのモードSオールコール質問/ロールコール質問に対するモードS応答、モードS非対応トランスポンダからのモードA/C質問に対する応答の受信処理を行うモードS地上局BS1とモードA/C地上局BS2とから構成される。
【0017】
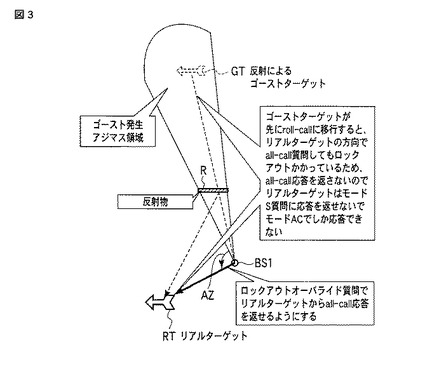
図3は、モードSレーダ地上局BS1における目標の検出動作を示している。モードSレーダ地上局BS1は、図3に示すように、モードSオールコールによる質問信号を送信して監視領域を方位方向(アジマス(AZ)方向)に走査する。そして、目標とするリアル機RTからの応答信号を受信検波して復号することで、リアル機RTを検出する。
【0018】
ところで、上記モードSレーダ地上局BS1は、走査域内の反射物Rによる反射でゴースト機GTを検出することもある。そうすると、ゴースト応答が先にオールコールから個別質問によるロールコールに移行することになる。この場合、航空機は、ロールコールによる質問信号のみを受け付けるロックアウトを設定する。
【0019】
このゴースト機GTのロールコール移行状態において、モードSレーダ地上局BS1はリアル機RTの方向へオールコールによる質問信号を送出してもロックアウトがかかってしまうため、リアル機RTの方向からは応答信号が返送されず、これによりリアル応答が検出できない。
【0020】
また、モードA/Cによるオールコール質問(P4パルス有り)に対し、ゴースト機GT及びリアル機RTは何も応答を返送しない。そこで、モードSシステムにおいて、ゴーストが発生すると予想されるアジマス領域に対し、通常のモードSオールコール質問/ロールコール質問に加え、P4パルスが有るモードA/Cオールコール質問の代わりに、P4パルスが無いモードA/C質問を行うMIIPモードによる質問を行うようにし、ゴースト機GT及びリアル機RTからモードS応答が無かった場合でも、モードA/C応答が得られるようにしている。
【0021】
ところで、マルチパスの影響がある状態でMIIP質問をすると、マルチパスの影響でゴースト機GTが先にロールコールに移行すると、リアル機RTの方向でオールコール質問してもロックアウトがかかっているため、オールコール応答を返さないのでリアル機RTがモードA/C質問には応答するが、モードS質問には応答しないで本来モードS搭載機であるにもかかわらずモードSとして検出できない。
【0022】
そこで、マルチパスの影響でゴースト機GTが先にロールコールに移行した場合、MIIP質問に対し、モードSの応答ができないモードS搭載のリアル機RTはモードA/Cで応答を返す。ゴースト機GTはモードS応答とモードA/C応答の両方を返す。ゴースト機GTのモードSアドレスと同じでかつモードA/Cにしか応答しないリアル機RTの方向に、SLO質問をすることで、ロックアウトを無視してオールコール応答を返すようになるので、モードS搭載のリアル機RTからもモードS応答を検出できるようにした。
【0023】
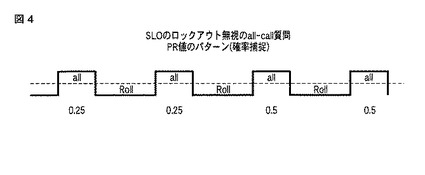
SLO質問とは、図4に示すように、ロックアウト無視の指示をし、応答確率(PR値)を下げる質問をすることで、ロックアウトした航空機に対してもオールコールが受信できるようにしたものである。なお、PR値が0.25である場合、4回の質問信号に対し1回は応答信号を返送し、PR値が0.5である場合、2回の質問信号に対し1回は応答信号を返送する。
【0024】
上記の原理に基づき、以下にこの発明の実施形態について説明する。
【0025】
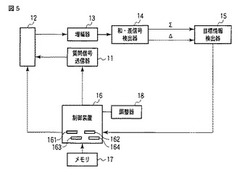
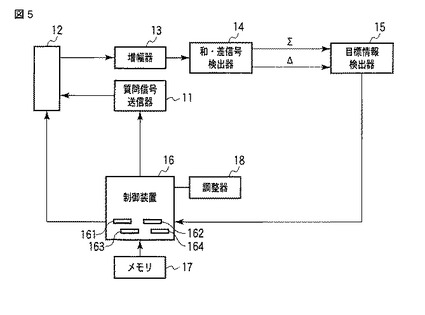
図5は、本発明に係り、モードSレーダ地上局BS1に備えられる二次監視レーダ装置の構成を示すブロック図である。図5において、質問信号送信器11から発生されたオールコールによる質問信号は、アンテナ12により所定方向に向けて送出される。航空機RTから返送される応答信号は、アンテナ12で受信され、増幅器13で増幅された後、和・差信号検出器14に供給される。この和・差信号検出器14は、各象限の受信信号を加算して和信号Σを生成し、各象限の受信信号を減算することで差信号Δを生成する。
【0026】
上記和・差信号検出器14で得られた和信号Σ及び差信号Δは、目標情報検出器15に供給される。目標情報検出器15は、和信号Σ及び差信号Δから目標方向及び目標とする航空機RTまでの距離を検出するものである。この検出情報は、制御装置16に供給される。
【0027】
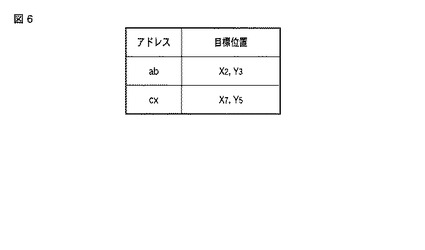
制御装置16は、目標情報検出器15により監視領域内に目標とする航空機RTが検出された場合に、メモリ17に目標位置と目標を特定するモードSアドレスとを対応付けて記憶する。メモリ17には、図6に示すデータが記憶される。そして、制御装置16は、メモリ17に記憶された目標に対し個別質問を行うように質問信号送信器11及びアンテナ12を制御する。
【0028】
ところで、上記制御装置16は、この発明に係わる機能として、MIIPモード制御部161と、判定部162と、SLOスキャン制御部163と、リアル応答検出部164とを備えている。
【0029】
MIIPモード制御部161は、MIIPモードによる質問信号をモードSレーダ地上局BS1の監視領域内の少なくとも一部で実行するように質問信号送信器11及びアンテナ12を制御する。
【0030】
判定部162は、MIIPモード制御部161によるMIIPモードの質問信号に対し、互いに異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致するか否かを判定する。
【0031】
SLOスキャン制御部163は、モードAアドレスが重複した場合に、モードSによるオールコール質問に応答信号が返送されない目標方向に対し、SLOスキャンを実行するように質問信号送信器11及びアンテナ12を制御する。また、SLOスキャン制御部163は、オペレータが調整器18によりPR値を変更する操作をなされた場合に、PR値の変更を行うようにしている。
【0032】
リアル応答検出部164は、SLOスキャンで応答信号を返送した航空機のモードSアドレスと、メモリ17に記憶されロールコールに移行済みの目標のモードSアドレスが一致し、目標位置に所定値以上の差がある場合に、SLOスキャンで返送された応答信号をリアル応答として検出し、メモリ17中の該当するアドレスの目標位置を更新する。なお、制御装置16は、リアル応答が得られた目標方向に対し、個別質問を行うようにする。
【0033】
次に、上記構成における動作について説明する。
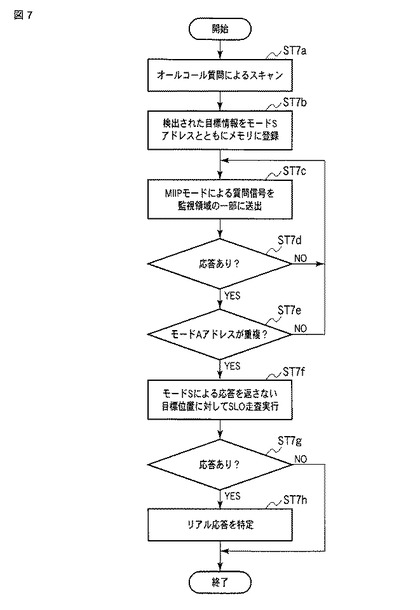
図7は、ゴースト応答を検出する際の制御装置16の処理手順を示すフローチャートである。まず、制御装置16は、質問信号送信器11及びアンテナ12を制御して、モードSオールコール質問によるスキャンを自局BS1の監視領域内で実行する(ステップST7a)。そして、スキャン実行中に応答信号を返送した目標位置(X2,Y3)と目標を特定するモードSアドレス(ab)とを対応付けてメモリ17に登録する(ステップST7b)。
【0034】
続いて、制御装置16は、メモリ17に登録された各航空機に対し個別質問を行うように質問信号送信器11及びアンテナ12を制御し、しかる後に、監視領域の一部に対しMIIPモードによる質問信号、つまりモードSによるオールコール質問信号を送出すると共に、モードA/Cによる質問信号を送出し(ステップST7c)、モードA/Cによる応答信号が返送されるか否かの判断を行う(ステップST7d)。
【0035】
ここで、異なる方位から複数の応答信号が返送された場合に(Yes)、制御装置16は各応答信号に付加されるモードAアドレスが重複するか否かの判断を行う(ステップST7e)。
【0036】
ここで重複した場合(Yes)、モードSによる応答信号が返送されない目標方向に対しSLOスキャンを実行し(ステップST7f)、応答信号が返送されるか否かの判断を行う(ステップST7g)。
【0037】
ここで、応答信号が返送された場合に(Yes)、制御装置16はSLO質問に対し応答があったほうをリアル応答と特定し(ステップST7h)、メモリ17中のモードSアドレス(ab)の目標位置(X2,Y3)をSLO質問により応答信号が返送された目標位置に更新する。
【0038】
以後、制御装置16は、リアル応答に対して、ロールコールによる質問信号を送出する。なお、上記ステップST7dにおいて応答がなかった場合(No)や、上記ステップST7eにおいてモードAアドレスが重複しなかった場合には(No)、制御装置16は上記ステップST7cの処理に移行する。さらに、上記ステップST7gにおいて応答がなかった場合(No)、制御装置16は処理をそのまま終了する。
【0039】
以上のように上記実施形態では、制御装置16において、モードSレーダ地上局BS1がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴースト機GTやリアル機RTからモードA/Cによる応答信号を返送させることで、反射物Rの反射によりゴースト機GTがロールコールに移行しているか否かを確認し、異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致する場合に、モードSによるオールコール質問に応答信号を返送されない目標方向に対し、SLOスキャンを実行し、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
【0040】
従って、反射物Rの反射によりモードSリアル機RTを検出できなかった場合であっても、MIIP質問に対しモードS応答を返送しない目標方位にSLO質問することでリアル機RTの検出を可能にすることができる。
【0041】
なお、MIIP質問信号送出する領域については、モードSレーダ地上局BS1がカバーする全監視領域であってもよい。
【0042】
また、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
【符号の説明】
【0043】
11…質問信号送信器、12…アンテナ、13…増幅器、14…和・差信号検出器、15…目標情報検出器、16…制御装置、17…メモリ、18…調整器、161…MIIPモード制御部、162…判定部、163…SLOスキャン制御部、164…リアル応答検出部、RT…リアル機、R…反射物、GT…ゴースト機、BS1…モードSレーダ地上局。
【技術分野】
【0001】
本発明は、例えば航空管制用レーダ装置に用いられるモードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法に関する。
【背景技術】
【0002】
航空管制用の二次監視レーダ装置は、例えば特許文献1に示されているように、質問信号を航空機上のトランスポンダ(応答装置)に送信し、このトランスポンダにより復号された質問信号に対応する応答信号を受信することによって航空機の識別を行なうものである。この場合、モノパルス測角方式により航空機の距離及び方位を求めている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−249291号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記二次監視レーダ装置を用いるレーダ地上局では、監視領域に進入する航空機に対しモードSのオールコールによる質問信号を送出し、この質問に対し返送される応答信号を受信した航空機に対し個別に質問信号を送出するロールコールを実行することで航空機の追跡を行うようにしている。また、モードSを有する二次監視レーダ装置において、モードA/C質問には応答するが、モードS質問に応答しない航空機の存在が明らかになり、地上側における対策として、モードSトランスポンダからモードA/C、モードS両方の応答を引き出すことにより、モードS質問には応答せずとも、モードA/C応答に基づく航空機監視を可能とするMIIP(Mode S Intermediate Interrogation Pattern)機能がある。
【0005】
マルチパスの影響がある状態でMIIP質問をすると、マルチパスの影響でゴースト機が先にロールコールに移行すると、リアル機の方向でオールコール質問してもロックアウトがかかっているため、オールコール応答を返さないのでリアル機がモードA/C質問には応答するが、モードS質問には応答しないで本来モードS搭載機であるにもかかわらずモードSとして検出できない。
【0006】
そこで、この発明の目的は、マルチパスの影響でMIIP質問に対し、モードS応答を返送しないリアル機からモードS応答を返送できるようにした二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、この発明に係る二次監視レーダ装置は、レーダ地上局に備えられ、当該レーダ地上局がカバーする監視領域内に進入する目標対象物に対しモードSで規定されるオールコール質問信号を送出し、このオールコール質問に対し返送される応答信号を受信した目標対象物に対し個別に質問信号を送出するロールコールを実行することで目標追跡を行うモードSを有する二次監視レーダ装置において、モードSによるオールコール質問を行うとともに、モードA/Cによる質問を行い、モードSによるオールコール質問に応答信号を返送しないロックアウトが設定された目標対象物に対しモードA/Cの質問に応答信号を返送させるMIIP(Mode S Intermediate Interrogation Pattern)モードの質問をレーダ地上局がカバーする監視領域の少なくとも一部で実行するMIIP質問実行手段と、このMIIP質問実行手段によるMIIPモードの質問信号に対し、互いに異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致するか否かを判定する判定手段と、この判定手段によりモードAアドレスが一致すると判定された場合に、モードSによるオールコール質問に応答信号が返送されない目標位置に対し、ロックアウトが設定された目標対象物に対しロックアウト無視の指示を出して応答確率を所定値より下げる質問を行うロックアウトオーバライドオールコール走査を実行する走査実行手段と、ロックアウトオーバライドオールコール走査で返送された応答信号をリアル応答として検出するリアル応答検出手段とを備えるようにしたものである。
【0008】
この構成によれば、レーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつ目標対象物からモードA/Cによる応答信号を返送させることで、マルチパスの影響によりゴースト機がロールコールに移行しているか否かを確認することができ、異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致する場合に、モードSによるオールコール質問に応答信号を返送されない目標方向に対し、ロックアウトオーバライドオールコール走査(以下、SLO走査と略す)を実行し、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
【0009】
従って、反射物の反射によりモードSリアル機を検出できなかった場合であっても、MIIP質問に対しモードS応答を返送しない目標方位にSLO質問することでリアル機の検出を可能にすることができる。
【発明の効果】
【0010】
上記発明によれば、マルチパスの影響でMIIP質問に対し、モードS応答を返送しないリアル機からモードS応答を返送できるようにした二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法を提供することができる。
【図面の簡単な説明】
【0011】
【図1】この発明の一実施形態のモードSを有する二次監視レーダ装置における通常動作時の監視システムを示す図。
【図2】MIIPモード動作時の監視システムを示す図。
【図3】この発明において、モードSレーダ地上局における目標の検出動作を示す図。
【図4】この発明において、SLO質問を行うタイミングを示す図。
【図5】この発明に係るモードSを有する二次監視レーダ装置の一実施形態の構成を示すブロック図。
【図6】上記図5に示したメモリの記憶内容の一例を示す図。
【図7】同実施形態における制御装置の処理手順を示すフローチャート。
【発明を実施するための形態】
【0012】
以下、この発明の実施形態について図面を参照して詳細に説明する。
まず、この発明に係る実施形態を説明するに先立ち、その動作原理について説明する。
【0013】
図1は、この発明の一実施形態のモードSを有する二次監視レーダ装置における通常動作時の監視システムを示す図である。図2は、MIIP(Mode S Intermediate Interrogation Pattern)モード動作時の監視システムを示す図である。
【0014】
本実施形態のMIIPモードでは、従来のモードSモードのシステムでは使用しなかったP4パルスが無いモノパルス形式の質問(モードA/C質問)とモードSオールコール質問/ロールコール質問とを交互に行う方式が採用される。また、本システムによりモードS航空機AP1もモードA/C応答することとなる。
【0015】
通常動作時は、図1に示すように、質問を受けて折り返す動作を行うモードS航空機AP1に搭載されたモードS対応トランスポンダ、同様に非モードS航空機AP2に搭載されたモードS非対応トランスポンダと、各トランスポンダに送信するそれぞれモードSオールコール質問/ロールコール質問及びモードA/C質問(P4パルス有り)のパルス変調信号の生成処理、及び、モードS対応トランスポンダからのモードSオールコール質問/ロールコール質問に対するモードS応答、モードS非対応トランスポンダからのモードA/C質問に対する応答の受信処理を行うモードS地上局BS1とモードA/C地上局BS2とから構成される。
【0016】
MIIPモード動作時は、図2に示すように、質問を受けて折り返す動作を行うモードS航空機AP1に搭載されたモードS対応トランスポンダ、同様に非モードS航空機AP2に搭載されたモードS非対応トランスポンダと、各トランスポンダに送信するそれぞれモードSオールコール質問/ロールコール質問及びモードA/C質問(P4パルス無し)のパルス変調信号の生成処理、及び、モードS対応トランスポンダからのモードSオールコール質問/ロールコール質問に対するモードS応答、モードS非対応トランスポンダからのモードA/C質問に対する応答の受信処理を行うモードS地上局BS1とモードA/C地上局BS2とから構成される。
【0017】
図3は、モードSレーダ地上局BS1における目標の検出動作を示している。モードSレーダ地上局BS1は、図3に示すように、モードSオールコールによる質問信号を送信して監視領域を方位方向(アジマス(AZ)方向)に走査する。そして、目標とするリアル機RTからの応答信号を受信検波して復号することで、リアル機RTを検出する。
【0018】
ところで、上記モードSレーダ地上局BS1は、走査域内の反射物Rによる反射でゴースト機GTを検出することもある。そうすると、ゴースト応答が先にオールコールから個別質問によるロールコールに移行することになる。この場合、航空機は、ロールコールによる質問信号のみを受け付けるロックアウトを設定する。
【0019】
このゴースト機GTのロールコール移行状態において、モードSレーダ地上局BS1はリアル機RTの方向へオールコールによる質問信号を送出してもロックアウトがかかってしまうため、リアル機RTの方向からは応答信号が返送されず、これによりリアル応答が検出できない。
【0020】
また、モードA/Cによるオールコール質問(P4パルス有り)に対し、ゴースト機GT及びリアル機RTは何も応答を返送しない。そこで、モードSシステムにおいて、ゴーストが発生すると予想されるアジマス領域に対し、通常のモードSオールコール質問/ロールコール質問に加え、P4パルスが有るモードA/Cオールコール質問の代わりに、P4パルスが無いモードA/C質問を行うMIIPモードによる質問を行うようにし、ゴースト機GT及びリアル機RTからモードS応答が無かった場合でも、モードA/C応答が得られるようにしている。
【0021】
ところで、マルチパスの影響がある状態でMIIP質問をすると、マルチパスの影響でゴースト機GTが先にロールコールに移行すると、リアル機RTの方向でオールコール質問してもロックアウトがかかっているため、オールコール応答を返さないのでリアル機RTがモードA/C質問には応答するが、モードS質問には応答しないで本来モードS搭載機であるにもかかわらずモードSとして検出できない。
【0022】
そこで、マルチパスの影響でゴースト機GTが先にロールコールに移行した場合、MIIP質問に対し、モードSの応答ができないモードS搭載のリアル機RTはモードA/Cで応答を返す。ゴースト機GTはモードS応答とモードA/C応答の両方を返す。ゴースト機GTのモードSアドレスと同じでかつモードA/Cにしか応答しないリアル機RTの方向に、SLO質問をすることで、ロックアウトを無視してオールコール応答を返すようになるので、モードS搭載のリアル機RTからもモードS応答を検出できるようにした。
【0023】
SLO質問とは、図4に示すように、ロックアウト無視の指示をし、応答確率(PR値)を下げる質問をすることで、ロックアウトした航空機に対してもオールコールが受信できるようにしたものである。なお、PR値が0.25である場合、4回の質問信号に対し1回は応答信号を返送し、PR値が0.5である場合、2回の質問信号に対し1回は応答信号を返送する。
【0024】
上記の原理に基づき、以下にこの発明の実施形態について説明する。
【0025】
図5は、本発明に係り、モードSレーダ地上局BS1に備えられる二次監視レーダ装置の構成を示すブロック図である。図5において、質問信号送信器11から発生されたオールコールによる質問信号は、アンテナ12により所定方向に向けて送出される。航空機RTから返送される応答信号は、アンテナ12で受信され、増幅器13で増幅された後、和・差信号検出器14に供給される。この和・差信号検出器14は、各象限の受信信号を加算して和信号Σを生成し、各象限の受信信号を減算することで差信号Δを生成する。
【0026】
上記和・差信号検出器14で得られた和信号Σ及び差信号Δは、目標情報検出器15に供給される。目標情報検出器15は、和信号Σ及び差信号Δから目標方向及び目標とする航空機RTまでの距離を検出するものである。この検出情報は、制御装置16に供給される。
【0027】
制御装置16は、目標情報検出器15により監視領域内に目標とする航空機RTが検出された場合に、メモリ17に目標位置と目標を特定するモードSアドレスとを対応付けて記憶する。メモリ17には、図6に示すデータが記憶される。そして、制御装置16は、メモリ17に記憶された目標に対し個別質問を行うように質問信号送信器11及びアンテナ12を制御する。
【0028】
ところで、上記制御装置16は、この発明に係わる機能として、MIIPモード制御部161と、判定部162と、SLOスキャン制御部163と、リアル応答検出部164とを備えている。
【0029】
MIIPモード制御部161は、MIIPモードによる質問信号をモードSレーダ地上局BS1の監視領域内の少なくとも一部で実行するように質問信号送信器11及びアンテナ12を制御する。
【0030】
判定部162は、MIIPモード制御部161によるMIIPモードの質問信号に対し、互いに異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致するか否かを判定する。
【0031】
SLOスキャン制御部163は、モードAアドレスが重複した場合に、モードSによるオールコール質問に応答信号が返送されない目標方向に対し、SLOスキャンを実行するように質問信号送信器11及びアンテナ12を制御する。また、SLOスキャン制御部163は、オペレータが調整器18によりPR値を変更する操作をなされた場合に、PR値の変更を行うようにしている。
【0032】
リアル応答検出部164は、SLOスキャンで応答信号を返送した航空機のモードSアドレスと、メモリ17に記憶されロールコールに移行済みの目標のモードSアドレスが一致し、目標位置に所定値以上の差がある場合に、SLOスキャンで返送された応答信号をリアル応答として検出し、メモリ17中の該当するアドレスの目標位置を更新する。なお、制御装置16は、リアル応答が得られた目標方向に対し、個別質問を行うようにする。
【0033】
次に、上記構成における動作について説明する。
図7は、ゴースト応答を検出する際の制御装置16の処理手順を示すフローチャートである。まず、制御装置16は、質問信号送信器11及びアンテナ12を制御して、モードSオールコール質問によるスキャンを自局BS1の監視領域内で実行する(ステップST7a)。そして、スキャン実行中に応答信号を返送した目標位置(X2,Y3)と目標を特定するモードSアドレス(ab)とを対応付けてメモリ17に登録する(ステップST7b)。
【0034】
続いて、制御装置16は、メモリ17に登録された各航空機に対し個別質問を行うように質問信号送信器11及びアンテナ12を制御し、しかる後に、監視領域の一部に対しMIIPモードによる質問信号、つまりモードSによるオールコール質問信号を送出すると共に、モードA/Cによる質問信号を送出し(ステップST7c)、モードA/Cによる応答信号が返送されるか否かの判断を行う(ステップST7d)。
【0035】
ここで、異なる方位から複数の応答信号が返送された場合に(Yes)、制御装置16は各応答信号に付加されるモードAアドレスが重複するか否かの判断を行う(ステップST7e)。
【0036】
ここで重複した場合(Yes)、モードSによる応答信号が返送されない目標方向に対しSLOスキャンを実行し(ステップST7f)、応答信号が返送されるか否かの判断を行う(ステップST7g)。
【0037】
ここで、応答信号が返送された場合に(Yes)、制御装置16はSLO質問に対し応答があったほうをリアル応答と特定し(ステップST7h)、メモリ17中のモードSアドレス(ab)の目標位置(X2,Y3)をSLO質問により応答信号が返送された目標位置に更新する。
【0038】
以後、制御装置16は、リアル応答に対して、ロールコールによる質問信号を送出する。なお、上記ステップST7dにおいて応答がなかった場合(No)や、上記ステップST7eにおいてモードAアドレスが重複しなかった場合には(No)、制御装置16は上記ステップST7cの処理に移行する。さらに、上記ステップST7gにおいて応答がなかった場合(No)、制御装置16は処理をそのまま終了する。
【0039】
以上のように上記実施形態では、制御装置16において、モードSレーダ地上局BS1がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴースト機GTやリアル機RTからモードA/Cによる応答信号を返送させることで、反射物Rの反射によりゴースト機GTがロールコールに移行しているか否かを確認し、異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致する場合に、モードSによるオールコール質問に応答信号を返送されない目標方向に対し、SLOスキャンを実行し、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
【0040】
従って、反射物Rの反射によりモードSリアル機RTを検出できなかった場合であっても、MIIP質問に対しモードS応答を返送しない目標方位にSLO質問することでリアル機RTの検出を可能にすることができる。
【0041】
なお、MIIP質問信号送出する領域については、モードSレーダ地上局BS1がカバーする全監視領域であってもよい。
【0042】
また、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。
【符号の説明】
【0043】
11…質問信号送信器、12…アンテナ、13…増幅器、14…和・差信号検出器、15…目標情報検出器、16…制御装置、17…メモリ、18…調整器、161…MIIPモード制御部、162…判定部、163…SLOスキャン制御部、164…リアル応答検出部、RT…リアル機、R…反射物、GT…ゴースト機、BS1…モードSレーダ地上局。
【特許請求の範囲】
【請求項1】
レーダ地上局に備えられ、当該レーダ地上局がカバーする監視領域内に進入する目標対象物に対しモードSで規定されるオールコール質問信号を送出し、このオールコール質問に対し返送される応答信号を受信した目標対象物に対し個別に質問信号を送出するロールコールを実行することで目標追跡を行うモードSを有する二次監視レーダ装置において、
前記モードSによるオールコール質問を行うとともに、モードA/Cによる質問を行い、前記モードSによるオールコール質問に応答信号を返送しないロックアウトが設定された目標対象物に対し前記モードA/Cの質問に応答信号を返送させるMIIP(Mode S Intermediate Interrogation Pattern)モードの質問を前記レーダ地上局がカバーする監視領域の少なくとも一部で実行するMIIP質問実行手段と、
このMIIP質問実行手段による前記MIIPモードの質問信号に対し、互いに異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致するか否かを判定する判定手段と、
この判定手段によりモードAアドレスが一致すると判定された場合に、前記モードSによるオールコール質問に応答信号が返送されない目標位置に対し、前記ロックアウトが設定された目標対象物に対し前記ロックアウト無視の指示を出して応答確率を所定値より下げる質問を行うロックアウトオーバライドオールコール走査を実行する走査実行手段と、
前記ロックアウトオーバライドオールコール走査で返送された応答信号をリアル応答として検出するリアル応答検出手段とを具備したことを特徴とする二次監視レーダ装置。
【請求項2】
前記走査実行手段は、前記応答確率を任意に設定可能な調整器を備えることを特徴とする請求項1記載の二次監視レーダ装置。
【請求項3】
レーダ地上局に備えられ、当該レーダ地上局がカバーする監視領域内に進入する目標対象物に対しモードSで規定されるオールコール質問信号を送出し、このオールコール質問に対し返送される応答信号を受信した目標対象物に対し個別に質問信号を送出するロールコールを実行することで目標追跡を行うモードSを有する二次監視レーダ装置で使用される制御方法において、
前記モードSによるオールコール質問を行うとともに、モードA/Cによる質問を行い、前記モードSによるオールコール質問に応答信号を返送しないロックアウトが設定された目標対象物に対し前記モードA/Cの質問に応答信号を返送させるMIIP(Mode S Intermediate Interrogation Pattern)モードの質問を前記レーダ地上局がカバーする監視領域の少なくとも一部で実行し、
前記MIIPモードの質問信号に対し、互いに異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致するか否かを判定し、
モードAアドレスが一致すると判定された場合に、前記モードSによるオールコール質問に応答信号が返送されない目標位置に対し、前記ロックアウトが設定された目標対象物に対し前記ロックアウト無視の指示を出して応答確率を所定値より下げる質問を行うロックアウトオーバライドオールコール走査を実行し、
前記ロックアウトオーバライドオールコール走査で返送された応答信号をリアル応答として検出することを特徴とする制御方法。
【請求項1】
レーダ地上局に備えられ、当該レーダ地上局がカバーする監視領域内に進入する目標対象物に対しモードSで規定されるオールコール質問信号を送出し、このオールコール質問に対し返送される応答信号を受信した目標対象物に対し個別に質問信号を送出するロールコールを実行することで目標追跡を行うモードSを有する二次監視レーダ装置において、
前記モードSによるオールコール質問を行うとともに、モードA/Cによる質問を行い、前記モードSによるオールコール質問に応答信号を返送しないロックアウトが設定された目標対象物に対し前記モードA/Cの質問に応答信号を返送させるMIIP(Mode S Intermediate Interrogation Pattern)モードの質問を前記レーダ地上局がカバーする監視領域の少なくとも一部で実行するMIIP質問実行手段と、
このMIIP質問実行手段による前記MIIPモードの質問信号に対し、互いに異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致するか否かを判定する判定手段と、
この判定手段によりモードAアドレスが一致すると判定された場合に、前記モードSによるオールコール質問に応答信号が返送されない目標位置に対し、前記ロックアウトが設定された目標対象物に対し前記ロックアウト無視の指示を出して応答確率を所定値より下げる質問を行うロックアウトオーバライドオールコール走査を実行する走査実行手段と、
前記ロックアウトオーバライドオールコール走査で返送された応答信号をリアル応答として検出するリアル応答検出手段とを具備したことを特徴とする二次監視レーダ装置。
【請求項2】
前記走査実行手段は、前記応答確率を任意に設定可能な調整器を備えることを特徴とする請求項1記載の二次監視レーダ装置。
【請求項3】
レーダ地上局に備えられ、当該レーダ地上局がカバーする監視領域内に進入する目標対象物に対しモードSで規定されるオールコール質問信号を送出し、このオールコール質問に対し返送される応答信号を受信した目標対象物に対し個別に質問信号を送出するロールコールを実行することで目標追跡を行うモードSを有する二次監視レーダ装置で使用される制御方法において、
前記モードSによるオールコール質問を行うとともに、モードA/Cによる質問を行い、前記モードSによるオールコール質問に応答信号を返送しないロックアウトが設定された目標対象物に対し前記モードA/Cの質問に応答信号を返送させるMIIP(Mode S Intermediate Interrogation Pattern)モードの質問を前記レーダ地上局がカバーする監視領域の少なくとも一部で実行し、
前記MIIPモードの質問信号に対し、互いに異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致するか否かを判定し、
モードAアドレスが一致すると判定された場合に、前記モードSによるオールコール質問に応答信号が返送されない目標位置に対し、前記ロックアウトが設定された目標対象物に対し前記ロックアウト無視の指示を出して応答確率を所定値より下げる質問を行うロックアウトオーバライドオールコール走査を実行し、
前記ロックアウトオーバライドオールコール走査で返送された応答信号をリアル応答として検出することを特徴とする制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−43430(P2011−43430A)
【公開日】平成23年3月3日(2011.3.3)
【国際特許分類】
【出願番号】特願2009−192240(P2009−192240)
【出願日】平成21年8月21日(2009.8.21)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年3月3日(2011.3.3)
【国際特許分類】
【出願日】平成21年8月21日(2009.8.21)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]