
ラジオコントロールカーの操舵制御装置
【課題】 ポテンションメータを回転させる減速ギアを介してサーボモータのポテンションメータ軸を回転させると、減速ギアでの各ギアどうしの隙間等による噛合度合いの関係でタイロッドの変位量とポテンションメータ軸の回転量に誤差が生じ、送信機より指令した前輪の操舵角と実際の前輪の操舵角とにずれが生じるといった問題があった。
【解決手段】 受信機よりの制御信号で制御されるモータ91の回転量を減速ギア94を介してタイロッド4を変位して前輪の操舵角を変化させ、該タイロッドの移動量をポテンションメータ92に直接伝達して出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御するラジオコントロールカーの操舵制御装置である。
【解決手段】 受信機よりの制御信号で制御されるモータ91の回転量を減速ギア94を介してタイロッド4を変位して前輪の操舵角を変化させ、該タイロッドの移動量をポテンションメータ92に直接伝達して出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御するラジオコントロールカーの操舵制御装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受信機よりの制御信号で制御されるモータの出力によってタイロッドをスライドさせ、該タイロッドの移動によって前輪を左右方向に回動させて操舵を制御する装置であって、前記タイロッドの移動変化量を直接ポテンションメータに伝達することで送信機よりの制御信号に応じた正確な操舵制御を行うようにしたラジオコントロールカーの操舵制御装置に関する。
【背景技術】
【0002】
従来における前輪の操舵装置は、例えば、特開2004−329368号公報に開示されているようにシャーシに着脱自在に取付けられている支持部材6bによって水平方向に摺動可能にタイロッド6aが取付けられ、サーボモータ(図示せず)によって回転する駆動軸1b1がタイロッド6aの裏面に形成された係合片6a2に係合されている。そして、サーボモータが回転し駆動軸が回転すると、該駆動軸に係合片によって係合されているタイロッドが水平移動し、該タイロッドに連結されている操舵部材8bを介して前輪の角度が変化するものである。
【0003】
また、一般的なラジオコントロールカーにあっては、送信機よりの操舵信号が送出され受信機が受信すると前記操舵信号を電圧に変換してサーボモータを回転させる。そして、前記サーボモータの回転量をポテンションメータで検出し、該ポテンションメータの回転量を電圧に変換して前記操舵信号の電圧とポテンションメータによる電圧とを比較して一致した時点でサーボモータの駆動を停止させ、送信機よりの信号に応じた走行玩具の旋回を行わせるものである。
【特許文献1】特開2004−329368号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、前記サーボモータの回転量をポテンションメータで検出するための構造としては、サーボモータの回転力をタイロッドに伝達するための減速ギアの一部にギアを介してポテンションメータの軸を回転させていた。このような減速ギアを介してのポテンションメータ軸への回転であると、減速ギアでの各ギアどうしの隙間等による噛合度合いの関係でタイロッドの変位量とポテンションメータ軸の回転量に誤差が生じ、送信機より指令した前輪の操舵角と実際の前輪の操舵角とにずれが生じるといった問題があった。
【0005】
本発明は前記した問題点を解決せんとするもので、その目的とするところは、モータによって変位するタイロッドの変位量を、該タイロッドと直接的に接続されたポテンションメータをその変位量で駆動するようにしたので、減速ギアの噛合度合い等によるタイロッドの変位量とポテンションメータの変位量のずれをなくして送信機よりの旋回指令に正確に対応した角度で前輪を駆動することができるラジオコントロールカーの旋回制御装置を提供せんとするにある。
【課題を解決するための手段】
【0006】
本発明のラジオコントロールカーの旋回制御装置は前記した目的を達成せんとするもので、請求項1の手段は、受信機よりの制御信号で制御されるモータの回転量で減速ギアを介してタイロッドを変位して前輪の操舵角を変化させ、該タイロッドの移動量でポテンションメータの出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御することを特徴とする。
【0007】
請求項2の手段は、前記した請求項1において、前記減速ギアの最終段ギアに形成された突起を前記タイロッドの移動と共に移動可能なタイロッドスライダーの係合部に係合させ、前記タイロッドが前記タイロッドスライダーとともに移動することで前輪の操舵角を変化させ、前記タイロッドスライダーに設けられたキャッチャーが、ポテンションメータの入力軸に固定された回転板に形成された係合突起と係合され、該キャッチャーの移動量を回転量に変換し、該回転板の回転量によってポテンションメータの出力を変化させるようにしたことを特徴とする。
【0008】
請求項3の手段は、シャーシに取付けられるケース内に収納され送信機よりの操舵信号を受信すると前記ケース内に水平方向に取付けられている受信機よりの制御信号で制御されるモータを駆動してタイロッドを変位させ、該タイロッドの変位量を前記ケース内に垂直方向に取付けられているポテンションメータで検出し、該ポテンションメータの出力と前記操舵信号との比較を行って一致すると前記モータを停止させる受信機と、前記モータの出力軸に連結された減速ギアと、該減速ギアの最終段ギアに形成された突起が係合される係合溝が形成され、かつ前記ポテンションメータの入力軸に取付けられた回転板の突起が係合されるキャッチャーが取り付けられた前記タイロッドと共に変位するタイロッドスライダーとより構成したものである。
【発明の効果】
【0009】
本発明は前記したように、モータの回転量で減速ギアを介してタイロッドを変位して前輪の操舵角を変化させ、該タイロッドの移動量で直接的にポテンションメータの出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御するようにしたので、減速ギアの噛合度合い等によるタイロッドの変位量とポテンションメータの変位量のずれをなくして送信機よりの旋回指令に正確に対応した角度で前輪を駆動することができ、従って、操縦者は送信機の操作レバーの操作量に応じた旋回量で走行玩具を思いのままに操縦できるものである。
【0010】
また、モータによって回転する減速ギアを介してのタイロッドの変位をタイロッドスライダーを介して行い、かつ、タイロッドスライダーの変位量(タイロッドの変位量)をポテンションメータで検出するようにしたので、モータの駆動量をポテンションメータに伝達する機構が簡単となり、かつ、正確に伝達することができるといった効果を有するものである。
【発明を実施するための最良の形態】
【0011】
本発明は、モータの回転によってタイロッドを水平に移動させて前輪の操舵角を変化させ、該タイロッドの移動量をポテンションメータに直接伝達することで、送信機よりの操舵角信号に応じて前輪の操舵角を制御することができる。
【実施例】
【0012】
以下、本発明に係るラジオコントロールカーの操舵制御装置の実施例を図面と共に説明する。
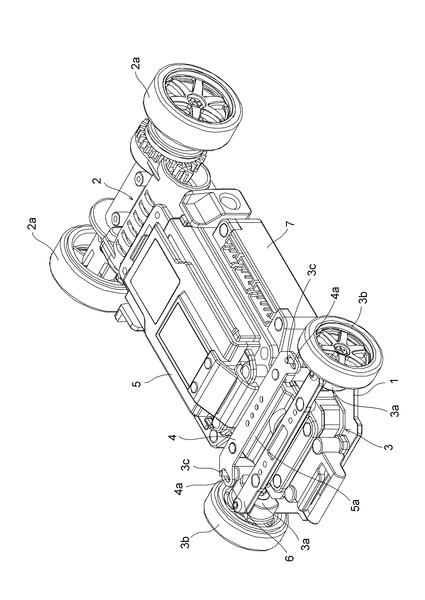
図1において、1はシャーシ、2は該シャーシ1の後方に取付けられた後輪2aを駆動モータ等の駆動源によって駆動するための駆動装置、3は前記シャーシ1の前方に従来と同様にシャーシ1に対して回転自在に軸支された操舵部材3aと、該操舵部材3aに取付けられた前輪3b等からなる操舵装置にして、前記操舵部材3aと一体的に形成された操舵杆3cに、シャーシ1に対して水平方向に移動するタイロッド4の両端の孔4aが係合されている。そして、タイロッド4が左右方向に変位すると操舵部材3aがシャーシ1を軸として回転することで、前輪3bは左右方向に操舵される。
【0013】
5はシャーシ1に取付けられた後述する本発明の操舵制御装置Aにおける後述する受信機8部分を覆うと共に操舵制御装置Aにおけるモータ91やポテンションメータ92、減速ギア94、伝達機構95からなるメカ部分9を覆う電池ボックスにして、メカ部分9を覆う部分には、前記したタイロッド4が摺動自在に載置するための水平部5aが形成され、かつ、前記操舵杆3cをシャーシ1との間で回転自在に軸支するための支持板6が取付けられている。
【0014】
次に、操舵制御装置Aの詳細を図2〜図5と共に説明する。
7は前記電池ボックス5の裏面側におけるシャーシに取付けられたケースにして、該ケース7の後方空間には送信機(図示せず)からの操舵信号と駆動装置における駆動モータの回転速度信号や正逆回転信号を受信すると共にモータ91の回転量とポテンションメータ92の回転量を比較して送信機よりの操舵信号と一致した時にモータ91を停止させるための受信機8が収納され、また、ケース7の前方空間にはメカ部分9が収納されている。
【0015】
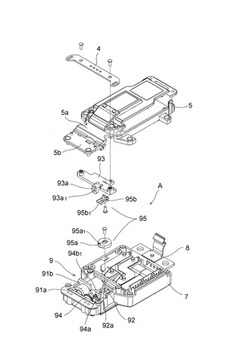
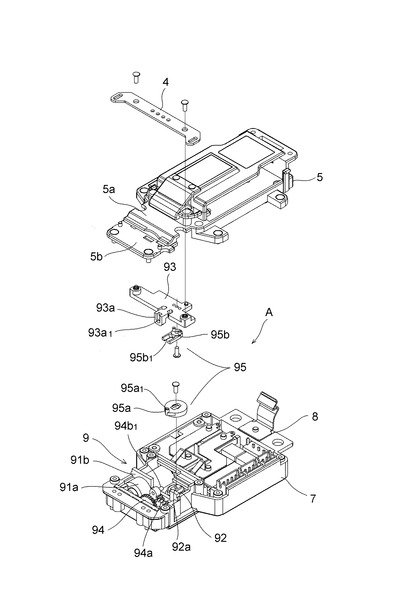
メカ部分9はケース7に水平状態で取付けられたモータ91と、ケース7に垂直状態で取付けられたポテンションメータ92と、前記タイロッド4と前記電池ボックス5の水平部5aを挟んで配置される共にタイロッド4の変位に伴って変位するタイロッドスライダー93と、前記モータ91の回転量を前記タイロッドスライダー93に伝達するための減速ギア94と、前記タイロッドスライダー93のスライド量を前記ポテンションメータ92に伝達するための伝達機構95とから構成されている。
【0016】
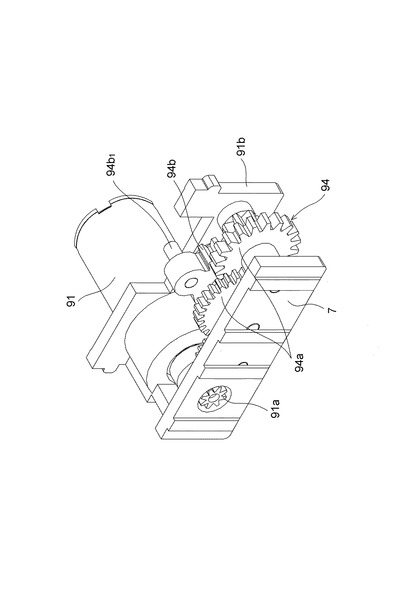
前記モータ91の回転を該モータ91の出力軸に取付けられた小ギア91aを介してタイロッドスライダー93に伝達するための減速ギア94は、複数のギア群94aと、該ギア群の最終段ギア94bとからなり、最終段ギア94bには前記タイロッドスライダー93に形成されている係合突起93aの係合溝93a1と係合される突起94b1が形成されている。なお、91bはモータ91を固定するためのケース6に取付けられている固定板である。
【0017】
そして、モータ91が受信機8よりの信号によって回転すると減速ギア94aを介して最終段ギア94bが回転し、該最終段ギア94bが回転することで突起94b1が円弧運動するので、該突起94b1が係合溝93a1に係合されているタイロッドスライダー93は水平方向に移動する。このタイロッドスライダー93の移動によってタイロッド4が移動して操舵杆3aを回転させるので前輪3bは操舵されることになる。
【0018】
一方、前記タイロッドスライダー93のスライド量を前記ポテンションメータ92に伝達するための伝達機構95は、ポテンションメータ92の入力軸92aに固定される回転板95aと、該回転板95aに形成された突起95a1と係合されるU字状の係合部95b1が形成されたキャッチャー95bとから構成されている。なお、キャッチャー95bはタイロッドスライダー93の裏面にネジ止めされタイロッドスライドー93と共に変位するものである。
【0019】
そして、前記モータ91の回転によってタイロッドスライダー93が変位すると、該タイロッドスライダー93に取付けられているキャッチャー95bが移動するので、該キャッチャー95bのU字状の係合部95b1に係合されている突起95a1が設けられている回転板95aがタイロッドスライダー93の水平方向の移動量を回転方向に変換するので、ポテンションメータ92の入力軸92aが回転され抵抗値が変化するものである。すなわち、ポテンションメータ92はタイロッド4の移動量と一致した抵抗値に変換されることになる。
【0020】
このように構成された操舵制御装置Aにあっては、送信機よりの操舵出力電圧信号を受信機8が受信してモータ91を回転させると前記したようにタイロッドスライダー93が水平方向に変位し、この変位によってタイロッド4が変位するので前輪4aを操舵する。また、タイロッドスライダー93が変位することで前記したようにポテンションメータ92がタイロッド4の変位量に応じた抵抗値となるので受信機8は抵抗値変化を電圧変化に変換する。
【0021】
そして受信機8は前記送信機よりの操舵出力電圧と抵抗値変化によって発生する電圧とを比較して送信機よりの入力電圧と抵抗値変化による出力電圧とが一致するとモータ91への出力を停止させるので、操縦者が送信機の操作レバーを操作した操作量に応じた旋回量で走行玩具を操舵されるので、操縦者が思った旋回量で走行玩具を正確に操縦することができるものである。
【図面の簡単な説明】
【0022】
【図1】本発明に係る操舵制御装置を搭載した走行玩具の斜視図である。
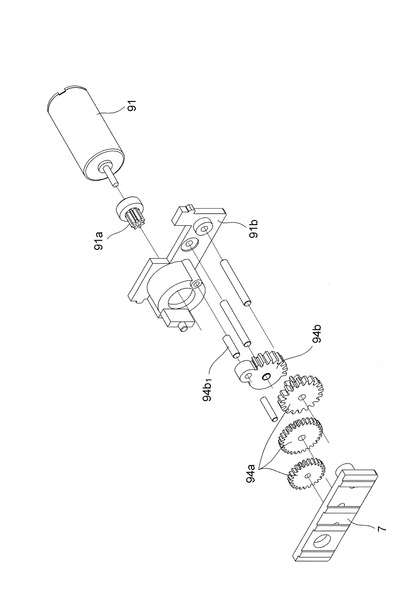
【図2】操舵制御装置部分の分解斜視図である。
【図3】モータと減速ギアとを組み込んだ状態の斜視図である。
【図4】同上の分解斜視図である。
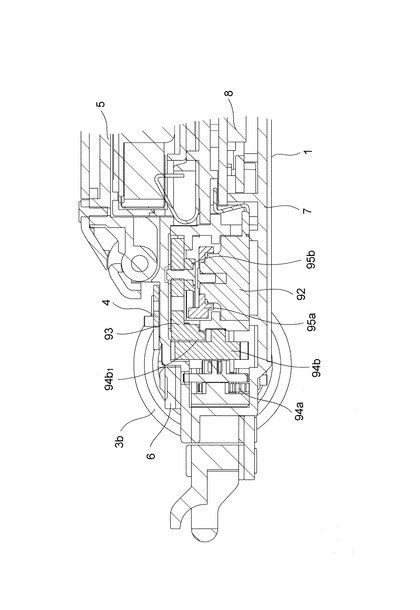
【図5】操舵制御装置部分の組立状態を示す断面図である。
【符号の説明】
【0023】
1 シャーシ
4 タイロッド
7 ケース
8 受信機
9 メカ部分
91 モータ
92 ポテンションメータ
93 タイロッドスライダー
94 減速ギア
95 伝達機構
【技術分野】
【0001】
本発明は、受信機よりの制御信号で制御されるモータの出力によってタイロッドをスライドさせ、該タイロッドの移動によって前輪を左右方向に回動させて操舵を制御する装置であって、前記タイロッドの移動変化量を直接ポテンションメータに伝達することで送信機よりの制御信号に応じた正確な操舵制御を行うようにしたラジオコントロールカーの操舵制御装置に関する。
【背景技術】
【0002】
従来における前輪の操舵装置は、例えば、特開2004−329368号公報に開示されているようにシャーシに着脱自在に取付けられている支持部材6bによって水平方向に摺動可能にタイロッド6aが取付けられ、サーボモータ(図示せず)によって回転する駆動軸1b1がタイロッド6aの裏面に形成された係合片6a2に係合されている。そして、サーボモータが回転し駆動軸が回転すると、該駆動軸に係合片によって係合されているタイロッドが水平移動し、該タイロッドに連結されている操舵部材8bを介して前輪の角度が変化するものである。
【0003】
また、一般的なラジオコントロールカーにあっては、送信機よりの操舵信号が送出され受信機が受信すると前記操舵信号を電圧に変換してサーボモータを回転させる。そして、前記サーボモータの回転量をポテンションメータで検出し、該ポテンションメータの回転量を電圧に変換して前記操舵信号の電圧とポテンションメータによる電圧とを比較して一致した時点でサーボモータの駆動を停止させ、送信機よりの信号に応じた走行玩具の旋回を行わせるものである。
【特許文献1】特開2004−329368号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、前記サーボモータの回転量をポテンションメータで検出するための構造としては、サーボモータの回転力をタイロッドに伝達するための減速ギアの一部にギアを介してポテンションメータの軸を回転させていた。このような減速ギアを介してのポテンションメータ軸への回転であると、減速ギアでの各ギアどうしの隙間等による噛合度合いの関係でタイロッドの変位量とポテンションメータ軸の回転量に誤差が生じ、送信機より指令した前輪の操舵角と実際の前輪の操舵角とにずれが生じるといった問題があった。
【0005】
本発明は前記した問題点を解決せんとするもので、その目的とするところは、モータによって変位するタイロッドの変位量を、該タイロッドと直接的に接続されたポテンションメータをその変位量で駆動するようにしたので、減速ギアの噛合度合い等によるタイロッドの変位量とポテンションメータの変位量のずれをなくして送信機よりの旋回指令に正確に対応した角度で前輪を駆動することができるラジオコントロールカーの旋回制御装置を提供せんとするにある。
【課題を解決するための手段】
【0006】
本発明のラジオコントロールカーの旋回制御装置は前記した目的を達成せんとするもので、請求項1の手段は、受信機よりの制御信号で制御されるモータの回転量で減速ギアを介してタイロッドを変位して前輪の操舵角を変化させ、該タイロッドの移動量でポテンションメータの出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御することを特徴とする。
【0007】
請求項2の手段は、前記した請求項1において、前記減速ギアの最終段ギアに形成された突起を前記タイロッドの移動と共に移動可能なタイロッドスライダーの係合部に係合させ、前記タイロッドが前記タイロッドスライダーとともに移動することで前輪の操舵角を変化させ、前記タイロッドスライダーに設けられたキャッチャーが、ポテンションメータの入力軸に固定された回転板に形成された係合突起と係合され、該キャッチャーの移動量を回転量に変換し、該回転板の回転量によってポテンションメータの出力を変化させるようにしたことを特徴とする。
【0008】
請求項3の手段は、シャーシに取付けられるケース内に収納され送信機よりの操舵信号を受信すると前記ケース内に水平方向に取付けられている受信機よりの制御信号で制御されるモータを駆動してタイロッドを変位させ、該タイロッドの変位量を前記ケース内に垂直方向に取付けられているポテンションメータで検出し、該ポテンションメータの出力と前記操舵信号との比較を行って一致すると前記モータを停止させる受信機と、前記モータの出力軸に連結された減速ギアと、該減速ギアの最終段ギアに形成された突起が係合される係合溝が形成され、かつ前記ポテンションメータの入力軸に取付けられた回転板の突起が係合されるキャッチャーが取り付けられた前記タイロッドと共に変位するタイロッドスライダーとより構成したものである。
【発明の効果】
【0009】
本発明は前記したように、モータの回転量で減速ギアを介してタイロッドを変位して前輪の操舵角を変化させ、該タイロッドの移動量で直接的にポテンションメータの出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御するようにしたので、減速ギアの噛合度合い等によるタイロッドの変位量とポテンションメータの変位量のずれをなくして送信機よりの旋回指令に正確に対応した角度で前輪を駆動することができ、従って、操縦者は送信機の操作レバーの操作量に応じた旋回量で走行玩具を思いのままに操縦できるものである。
【0010】
また、モータによって回転する減速ギアを介してのタイロッドの変位をタイロッドスライダーを介して行い、かつ、タイロッドスライダーの変位量(タイロッドの変位量)をポテンションメータで検出するようにしたので、モータの駆動量をポテンションメータに伝達する機構が簡単となり、かつ、正確に伝達することができるといった効果を有するものである。
【発明を実施するための最良の形態】
【0011】
本発明は、モータの回転によってタイロッドを水平に移動させて前輪の操舵角を変化させ、該タイロッドの移動量をポテンションメータに直接伝達することで、送信機よりの操舵角信号に応じて前輪の操舵角を制御することができる。
【実施例】
【0012】
以下、本発明に係るラジオコントロールカーの操舵制御装置の実施例を図面と共に説明する。
図1において、1はシャーシ、2は該シャーシ1の後方に取付けられた後輪2aを駆動モータ等の駆動源によって駆動するための駆動装置、3は前記シャーシ1の前方に従来と同様にシャーシ1に対して回転自在に軸支された操舵部材3aと、該操舵部材3aに取付けられた前輪3b等からなる操舵装置にして、前記操舵部材3aと一体的に形成された操舵杆3cに、シャーシ1に対して水平方向に移動するタイロッド4の両端の孔4aが係合されている。そして、タイロッド4が左右方向に変位すると操舵部材3aがシャーシ1を軸として回転することで、前輪3bは左右方向に操舵される。
【0013】
5はシャーシ1に取付けられた後述する本発明の操舵制御装置Aにおける後述する受信機8部分を覆うと共に操舵制御装置Aにおけるモータ91やポテンションメータ92、減速ギア94、伝達機構95からなるメカ部分9を覆う電池ボックスにして、メカ部分9を覆う部分には、前記したタイロッド4が摺動自在に載置するための水平部5aが形成され、かつ、前記操舵杆3cをシャーシ1との間で回転自在に軸支するための支持板6が取付けられている。
【0014】
次に、操舵制御装置Aの詳細を図2〜図5と共に説明する。
7は前記電池ボックス5の裏面側におけるシャーシに取付けられたケースにして、該ケース7の後方空間には送信機(図示せず)からの操舵信号と駆動装置における駆動モータの回転速度信号や正逆回転信号を受信すると共にモータ91の回転量とポテンションメータ92の回転量を比較して送信機よりの操舵信号と一致した時にモータ91を停止させるための受信機8が収納され、また、ケース7の前方空間にはメカ部分9が収納されている。
【0015】
メカ部分9はケース7に水平状態で取付けられたモータ91と、ケース7に垂直状態で取付けられたポテンションメータ92と、前記タイロッド4と前記電池ボックス5の水平部5aを挟んで配置される共にタイロッド4の変位に伴って変位するタイロッドスライダー93と、前記モータ91の回転量を前記タイロッドスライダー93に伝達するための減速ギア94と、前記タイロッドスライダー93のスライド量を前記ポテンションメータ92に伝達するための伝達機構95とから構成されている。
【0016】
前記モータ91の回転を該モータ91の出力軸に取付けられた小ギア91aを介してタイロッドスライダー93に伝達するための減速ギア94は、複数のギア群94aと、該ギア群の最終段ギア94bとからなり、最終段ギア94bには前記タイロッドスライダー93に形成されている係合突起93aの係合溝93a1と係合される突起94b1が形成されている。なお、91bはモータ91を固定するためのケース6に取付けられている固定板である。
【0017】
そして、モータ91が受信機8よりの信号によって回転すると減速ギア94aを介して最終段ギア94bが回転し、該最終段ギア94bが回転することで突起94b1が円弧運動するので、該突起94b1が係合溝93a1に係合されているタイロッドスライダー93は水平方向に移動する。このタイロッドスライダー93の移動によってタイロッド4が移動して操舵杆3aを回転させるので前輪3bは操舵されることになる。
【0018】
一方、前記タイロッドスライダー93のスライド量を前記ポテンションメータ92に伝達するための伝達機構95は、ポテンションメータ92の入力軸92aに固定される回転板95aと、該回転板95aに形成された突起95a1と係合されるU字状の係合部95b1が形成されたキャッチャー95bとから構成されている。なお、キャッチャー95bはタイロッドスライダー93の裏面にネジ止めされタイロッドスライドー93と共に変位するものである。
【0019】
そして、前記モータ91の回転によってタイロッドスライダー93が変位すると、該タイロッドスライダー93に取付けられているキャッチャー95bが移動するので、該キャッチャー95bのU字状の係合部95b1に係合されている突起95a1が設けられている回転板95aがタイロッドスライダー93の水平方向の移動量を回転方向に変換するので、ポテンションメータ92の入力軸92aが回転され抵抗値が変化するものである。すなわち、ポテンションメータ92はタイロッド4の移動量と一致した抵抗値に変換されることになる。
【0020】
このように構成された操舵制御装置Aにあっては、送信機よりの操舵出力電圧信号を受信機8が受信してモータ91を回転させると前記したようにタイロッドスライダー93が水平方向に変位し、この変位によってタイロッド4が変位するので前輪4aを操舵する。また、タイロッドスライダー93が変位することで前記したようにポテンションメータ92がタイロッド4の変位量に応じた抵抗値となるので受信機8は抵抗値変化を電圧変化に変換する。
【0021】
そして受信機8は前記送信機よりの操舵出力電圧と抵抗値変化によって発生する電圧とを比較して送信機よりの入力電圧と抵抗値変化による出力電圧とが一致するとモータ91への出力を停止させるので、操縦者が送信機の操作レバーを操作した操作量に応じた旋回量で走行玩具を操舵されるので、操縦者が思った旋回量で走行玩具を正確に操縦することができるものである。
【図面の簡単な説明】
【0022】
【図1】本発明に係る操舵制御装置を搭載した走行玩具の斜視図である。
【図2】操舵制御装置部分の分解斜視図である。
【図3】モータと減速ギアとを組み込んだ状態の斜視図である。
【図4】同上の分解斜視図である。
【図5】操舵制御装置部分の組立状態を示す断面図である。
【符号の説明】
【0023】
1 シャーシ
4 タイロッド
7 ケース
8 受信機
9 メカ部分
91 モータ
92 ポテンションメータ
93 タイロッドスライダー
94 減速ギア
95 伝達機構
【特許請求の範囲】
【請求項1】
受信機よりの制御信号で制御されるモータの回転量でギア機構を介してタイロッドを変位して前輪の操舵角を変化させ、該タイロッドの移動量でポテンショメータの出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御することを特徴とするラジオコントロールカーの操舵制御装置。
【請求項2】
前記減速ギアの最終段ギアに形成された突起を前記タイロッドの移動と共に移動可能なタイロッドスライダーの係合部に係合させ、前記タイロッドが前記タイロッドスライダーとともに移動することで前輪の操舵角を変化させ、前記タイロッドスライダーに設けられたキャッチャーが、ポテンションメータの入力軸に固定された回転板に形成された係合突起と係合され、該キャッチャーの移動量を回転量に変換し、該回転板の回転量によってポテンションメータの出力を変化させるようにしたことを特徴とする請求項1記載のラジオコントロールカーの操舵制御装置。
【請求項3】
シャーシに取付けられるケース内に収納され送信機よりの操舵信号を受信すると前記ケース内に水平方向に取付けられている受信機よりの制御信号で制御されるモータを駆動してタイロッドを変位させ、該タイロッドの変位量を前記ケース内に垂直方向に取付けられているポテンショメータで検出し、該ポテンショメータの出力と前記操舵信号との比較を行って一致すると前記モータを停止させる受信機と、
前記モータの出力軸に連結された減速ギアと、
該減速ギアの最終段ギアに形成された突起が係合される係合溝が形成され、かつ、前記ポテンションメータの入力軸に取付けられた回転板の突起が係合されるキャッチャーが取り付けられた前記タイロッドと共に変位するタイロッドスライダーと、
より構成したことを特徴とするラジオコントロールカーの操舵制御装置。
【請求項1】
受信機よりの制御信号で制御されるモータの回転量でギア機構を介してタイロッドを変位して前輪の操舵角を変化させ、該タイロッドの移動量でポテンショメータの出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御することを特徴とするラジオコントロールカーの操舵制御装置。
【請求項2】
前記減速ギアの最終段ギアに形成された突起を前記タイロッドの移動と共に移動可能なタイロッドスライダーの係合部に係合させ、前記タイロッドが前記タイロッドスライダーとともに移動することで前輪の操舵角を変化させ、前記タイロッドスライダーに設けられたキャッチャーが、ポテンションメータの入力軸に固定された回転板に形成された係合突起と係合され、該キャッチャーの移動量を回転量に変換し、該回転板の回転量によってポテンションメータの出力を変化させるようにしたことを特徴とする請求項1記載のラジオコントロールカーの操舵制御装置。
【請求項3】
シャーシに取付けられるケース内に収納され送信機よりの操舵信号を受信すると前記ケース内に水平方向に取付けられている受信機よりの制御信号で制御されるモータを駆動してタイロッドを変位させ、該タイロッドの変位量を前記ケース内に垂直方向に取付けられているポテンショメータで検出し、該ポテンショメータの出力と前記操舵信号との比較を行って一致すると前記モータを停止させる受信機と、
前記モータの出力軸に連結された減速ギアと、
該減速ギアの最終段ギアに形成された突起が係合される係合溝が形成され、かつ、前記ポテンションメータの入力軸に取付けられた回転板の突起が係合されるキャッチャーが取り付けられた前記タイロッドと共に変位するタイロッドスライダーと、
より構成したことを特徴とするラジオコントロールカーの操舵制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−183477(P2009−183477A)
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願番号】特願2008−26919(P2008−26919)
【出願日】平成20年2月6日(2008.2.6)
【出願人】(390024822)京商株式会社 (15)
【Fターム(参考)】
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願日】平成20年2月6日(2008.2.6)
【出願人】(390024822)京商株式会社 (15)
【Fターム(参考)】
[ Back to top ]