
ラジコン模型の制御装置およびその操縦パラメータ設定システム
【課題】制御パラメ−タをラジコン模型の動特性に容易に設定し、あるいは変更でき、送信機側の負担を軽減したラジコン模型の制御装置およびその制御パラメータ設定システムを提供する。
【解決手段】パーソナル・コンピュータ200で変更・設定し、ラジコンヘリコプターに通信ケーブル12を介して転送された設定情報の各種設定値は制御パラメ−タとしてメモリ4の設定値格納部4Aに格納される。ラジコンヘリコプターの動力モータ7の回転開始から浮揚、飛行、着陸の期間に、送信機1から送信される操縦指令信号を構成する各制御信号はラジコンヘリコプターに搭載された受信機2で受信される。操縦指令信号は受信機2のデコーダ2Bで復号され、各種の操縦指令信号として再生される。再生された操縦指令信号は制御信号加工部5でメモリ4の設定値格納部4Aに格納されている設定値に従ってそれぞれ加工される。加工された各操縦指令信号は、後段の駆動機構に供給され、それぞれの制御対象を制御する。
【解決手段】パーソナル・コンピュータ200で変更・設定し、ラジコンヘリコプターに通信ケーブル12を介して転送された設定情報の各種設定値は制御パラメ−タとしてメモリ4の設定値格納部4Aに格納される。ラジコンヘリコプターの動力モータ7の回転開始から浮揚、飛行、着陸の期間に、送信機1から送信される操縦指令信号を構成する各制御信号はラジコンヘリコプターに搭載された受信機2で受信される。操縦指令信号は受信機2のデコーダ2Bで復号され、各種の操縦指令信号として再生される。再生された操縦指令信号は制御信号加工部5でメモリ4の設定値格納部4Aに格納されている設定値に従ってそれぞれ加工される。加工された各操縦指令信号は、後段の駆動機構に供給され、それぞれの制御対象を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ラジコン模型の制御に係り、特に当該模型が送信機から受信した指令信号に応じて姿勢や方向等を制御するための基準となる所望の操縦パラメ−タの設定や変更を容易にすると共に、送信機の負担を軽減して構成を簡素化したラジコン模型の制御装置および操縦パラメータ設定システムに関する。
【背景技術】
【0002】
遠隔制御されるヘリコプタや車両などの無線操縦模型はラジコンと愛称され、ホビーの世界だけでなく、多くの産業分野で広く利用されている。ラジコン模型には、受信機、サーボモータ、スピードコントローラ、ジャイロ、バッテリーなど、飛行または走行制御をするための複数の電子制御機器(操縦制御機器)が搭載されている。そして、その操舵角や動力の出力特性など、操縦制御の基準となるパラメータ(所望の操縦パラメータ)を適切に設定しておく必要がある。また、この操縦パラメ−タの設定値を任意に変更して種々の操縦パターンを実現することも行われている。
【0003】
ラジコン模型を飛行させ、あるいは走行させる場合、操舵角特性や動力の出力特性などを適切に設定し、あるいはこれを変更する必要がある。例えば、電動モータを動力源としたラジコンヘリコプターでは、その電動モータの軸出力特性は、リニアな変化ではなく、非線形な特性で変化するように設定することによって、良好な操縦性が得られる。また、操舵部位の変化特性のゲイン」や線形性を調整することでも、上記の電動モータの軸出力特性の設定と共にさらに良好な操縦性を得てラジコン模型を楽しむことができる。これら動力、操縦特性の設定は、サーボモータの駆動軸に対するサーボホーンの固定角、サーボホーンとリンケージワイヤの連結部位などの機械的な部分と、電気的な出力値など数値設定をプログラマブルに行う電気的な部分とに分かれる。近年、プログラマブルに行う部分の機能が充実しており、詳細で多様な設定が可能となっている。
【0004】
ラジコン模型に操縦パターン情報を記憶させたメモリ媒体を搭載し、このメモリ媒体に記憶した情報に従ってラジコン模型を操縦するものは、例えば特許文献1に開示がある。また、操縦者がラジコン模型の所望の操縦パラメ−タの設定、変更する従来技術としての特許文献2では、電動ラジコンカーの走行中に、メモリに格納されている動力モータの最大許容電流などの設定値を送信機からの指令で変更するようにしたものが開示されている。
【特許文献1】特開2006−346144号公報
【特許文献2】特開平6−312065号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
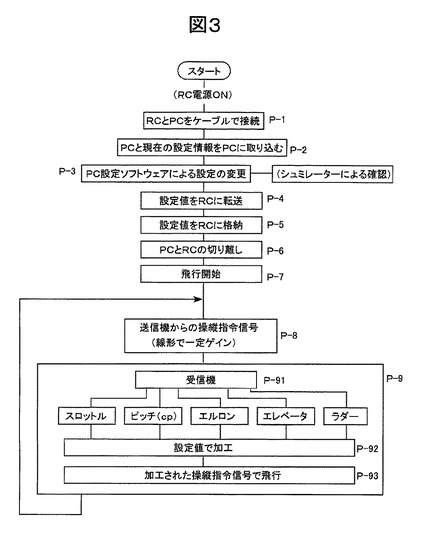
ここでは、仮に、前記した特許文献2に開示の設定情報の変更方法を用いて、多様なパラメータの設定値を変更し、新たに設定しようとした場合について説明する。図4は、送信機を用いた従来の所望の操縦パラメ−タの設定、変更を行うようにした場合の説明図である。ここでは、ラジコン模型として電動モータを動力としたラジコンヘリコプターを例として説明する。また、図5は、図4のラジコンヘリコプターに搭載される受信機や駆動制御回路等の電子機器の構成図である。図4中、ラジコンヘリコプター100は送信機300により操縦制御されている。ラジコンヘリコプター100には駆動制御回路101が搭載され、受信アンテナ102を介して受信機2で受信し、受信機2に有するデコード部で復号された操縦指令信号に基づいて動力モータ、コレクティブピッチ、ラダー、エレベータ、エルロン等の制御を行うサーボモータを駆動する。
【0006】
送信機300には、スティック301、302、設定される特性などの表示を行う表示器303、送信アンテナ304、電源スイッチ、チャンネル選択スイッチ307、308、その他のスイッチ305、306等が装備されている。このシステムで設定情報の変更を行う場合、例えばスイッチ類305あるいは306の何れかにより所望の特性を選んで表示器303に表示させて確認する。その後、スイッチ類305あるいは306の何れかで特定のチャンネルを選択し、スイッチ類307あるいは308の何れかを押すことでラジコンヘリコプター100に設定値の情報を送信する。
【0007】
ラジコンヘリコプター100は、送信された設定値の情報を受信機2で受信し、後述のRF部2Aで増幅・検波し、デコーダ2Bで復号してモータドライバの駆動信号、所定のサーボモータの駆動信号を生成する。すなわち、図5において、受信機2は高周波信号処理部(RF部)2Aで受信波の増幅、検波し、デコード部2Bで復号する。デコード部2Bで復号された操縦指令信号は中央制御装置(CPU)5で所定の制御信号形式に調整された後、それぞれのドライバ18、19を介して動力モータ7、操舵用のサーボモータ8等に供給される。この例では、動力モータ7の駆動信号は、メモリ4に格納された設定値にしたがって中央制御装置(CPU)5で加工される。この加工は、例えば操縦環境に応じた動力モータ7の最大電流値である。加工された操縦指令信号は、ドライバ14のモータ電流調整回路の上限値を調整し、動力モータ7はこの設定された最大電流値以内で駆動される。
【0008】
メモリ4への設定情報(制御パラメータ)の設定値の格納、変更は送信機の特定チャンネルで送信する。特許文献2に記載されたように、上記した操縦指令信号の一つの情報についての設定変更は、このような方法すなわち操縦中に特定のチャンネルから受信機を介してメモリに設定する方法で実用化できる。しかし、複数の設定情報について上記と同じような方法で制御パラメータを設定し、あるいは変更するためには、送信機300にそれ相当の回路、スイッチなどの機能部品を搭載する必要がある。
【0009】
このように、電気的な設定(操縦パラメ−タの設定値の変更、設定)は、従来から、主としてラジコン模型の操縦に使用する送信機に搭載された設定・調整機能により行われてきた。そのため、送信機に搭載される機能部品や回路部品等が多くなると共に、設定機能を実行するためのスイッチやダイヤル等の数、設定情報を送信するための機能部分、確認のためのディスプレイ等、多くの機能が要求され、送信機自体の規模が増大することになる。しかし、送信機の大きさには、自ずと限界があり、また操作が多様化することで操作性や機能性に限りがある。特許文献1に開示の設定値の設定方法は、送信機から特定のチャンネルを用いて動力モータの最大許容電流値の変更を行うものであり、制御信号をラジコン模型の動特性(ラジコン模型の種類や個々の機体に特有の操縦指令―動作特性)に適合するように加工する場合のように、多様な設定値を細かく設定あるいは変更することは極めて困難である。
【0010】
本発明の目的は、このような送信機を用いた設定変更では制限される多様な制御パラメ−タの設定値をラジコン模型に容易に設定し、あるいは容易に設定値の変更ができ、送信機側の負担を軽減し、操縦性能を向上したラジコン模型の制御装置およびその操縦パラメータ設定システムを提供することにある。
【課題を解決するための手段】
【0011】
本発明は、ラジコン模型の機体に搭載される駆動制御回路に制御パラメ−タの設定値を格納する領域を有するメモリを設ける。操縦パラメ−タの変更すなわち設定情報の操作は、この制御装置に通信ケーブルを介して接続した外部装置で行う。外部装置としては、パーソナル・コンピュータ(以下、単にPCとも称する)が好適であるが、同様の機能を備えた情報設定用の専用装置であってよい。PCはラジコン模型に設定すべき制御パラメ−タの設定値を表示画面上で所望の値に変更し、設定して新しい制御パラメ−タ(新たな設定値)を生成する。この新たな設定値は通信ケーブルを介してラジコン模型に搭載されている駆動制御回路のメモリに設けた設定値格納領域に直接転送して格納される。
【0012】
ラジコン模型の機体の一部には、上記のケーブルを接続するための外部入力端子を備えている。ラジコン模型を停止させた状態で、通信ケーブルでPCと接続して上記の操作を実行する。
【0013】
また、PCにはラジコン模型の操縦シミュレータソフトウエアを搭載することもできる。PC上で前記パラメータ情報の設定、変更に連動して変更される設定値に従って、操縦シミュレータソフトウエアを用いてバーチャル操縦を実行することもできる。
【発明の効果】
【0014】
所望の制御パラメ−タの設定値の変更と設定、メモリへの格納に送信機を必要としないことで、送信機の負担が軽減され、その構成も簡素化でき、小型化、軽量化が容易である。設定値の変更、設定の操作は、PCに情報設定用のソフトウエア(制御パラメータの設定・変更手順)をインストールすることで、さらに詳細な関連情報を表示画面上に分かりやすく表示させ、設定作業を容易にすることができる。
【0015】
また、PCにラジコン模型の飛行や、走行の操縦シミュレータソフトウエアを搭載することで、PC上で設定した仮想設定値を操縦シミュレータの制御パラメータ(設定値)と連動させることにより、送信機やキーボードからPC画面上で仮想設定値が反映されたラジコン模型の飛行、走行のコンピュータ・シミュレーションを行うことができ、実機に設定する前に設定値の確認、変更をすることがきる。
【0016】
さらに、ラジコン模型のパーツ(機能部品)の変更(パーツの特性情報の変更)を指示することで、操縦シミュレータソフトウエアにより、当該パーツの特性に応じた値に設定値を自動的に適合させて飛行、走行のコンピュータ・シミュレーションを行うことができ、新たなパーツによる操縦形態の確認をすることがきる。
【発明を実施するための最良の形態】
【0017】
以下、本発明の最良の実施形態につき、実施例の図面を参照して詳細に説明する。
【実施例】
【0018】
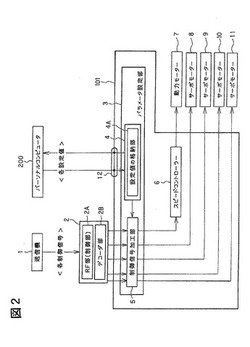
図1は、本発明のラジコン模型の制御装置およびその操縦パラメータ設定システムの説明図である。本実施例では、ラジコンヘリコプター100に搭載する駆動制御回路101に、中央制御装置(CPU)3と、設定値格納部(メモリ)4、制御信号加工部5、その他の回路を設けた。また、ラジコンヘリコプター100にはコネクタ12が設けられており、外部装置であるPCのコネクタ14との間を通信ケーブル13で接続されている。受信機2は、高周波(RF)処理部2A、検波部、デコーダ部2Bを有する。17はバッテリーである。
【0019】
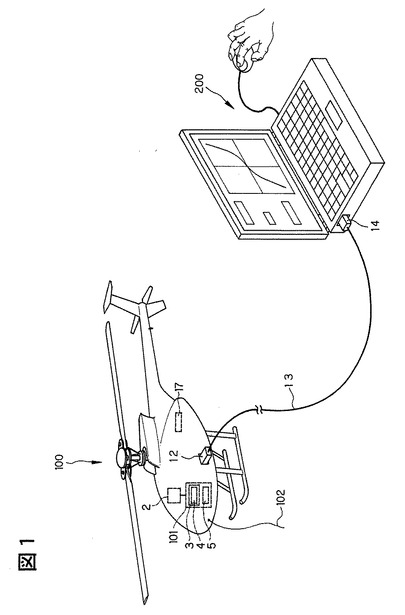
図2は、本発明に係る操縦パラメータ設定システムの一実施例を説明するシステム構成例のブロック図である。図2には、図1で説明した受信機2と駆動制御回路101の詳細な構成例を示す。図2において、図1と同一符号は同一機能部分に対応する。また、参照符号6はスピードコントローラ、7は動力モータ、8〜11は操舵用サーボモータを示す。操舵用サーボモータ8、9、10、11は、例えばコレクティブピッチ、ラダー、エレベータ、エルロンの制御を行うサーボモータである。
【0020】
図1に示した構成において、ラジコンヘリコプター100の主電源を投入した状態で通信ケーブル12を介してPC200と直接接続する。PC200では、内蔵する操縦パラメータ操作プログラムにより所望の制御パラメータの設定値を生成する。制御パラメータは、例えば動力モータの駆動特性、コレクティブピッチ、ラダー、エレベータ、エルロン等の操作特性などである。生成された制御パラメータの設定値は、PC200から通信ケーブル12を介して設定値格納部であるメモリ4に転送され、格納される。なお、電源は通信ケーブルを介し、PC側から供給することも可能である。
【0021】
ラジコンヘリコプター100の動力モータ7の回転開始から浮揚、飛行、着陸の期間に、送信機1から送信される操縦指令信号を構成する各制御信号で変調した搬送波はラジコンヘリコプター100に搭載された受信機2で受信される。受信された搬送波は受信機2内の高周波処理部(RF部)2Aで増幅され、検波されてデコーダ部2Bで復号され、各種の操縦指令信号として再生される。再生された操縦指令信号は制御信号加工部5でメモリ4に格納されている設定値(設定特性)に従ってそれぞれ加工される。例えば、動力モータ7の操縦指令信号は設定値格納部4Aに格納されている設定値で規定のゲインや線形な入力が加工され、所望な非線形の出力特性となるように変化される。
【0022】
ここで、制御信号加工部5での操縦指令信号の加工の一例を処理の流れに従って説明する。設定情報をラジコンヘリコプター100に転送する前に、PC200では制御パラメータ操作プログラムを用いて所要の制御パラメータの設定、変更を行い、これを所定のファイルに設定情報として保持しておく。このとき、PC200をラジコンヘリコプター100に接続しておく必要は必ずしもないが、図1に示したように、両者を接続した状態で作業するのが作業効率上好ましい。
【0023】
先ず、PC200をラジコンヘリコプター100に接続した状態で、ラジコンヘリコプター100の主電源を投入、又は通信ケーブル13を介しPC200側から電源を供給して、駆動制御回路101を作動準備状態にする。次に、PC200の操縦パラメータ操作プログラムを立ち上げ、又は立ち上げた状態とし、前記したファイルに保持された設定情報をラジコンヘリコプター100のメモリ4に転送する。
【0024】
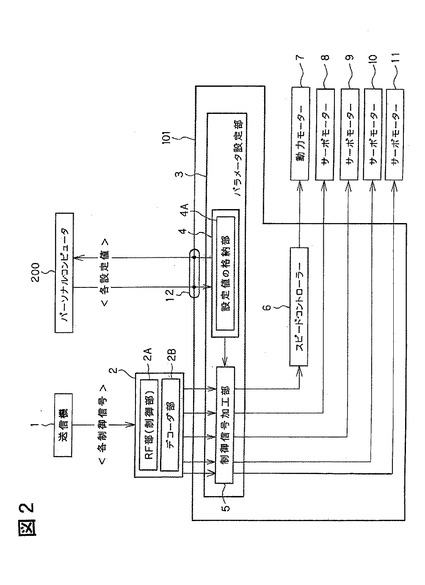
図3は、本実施例における制御パラメータの設定、設定値による操縦指令信号の加工と飛行の手順を説明する流れ図である。各処理のプロセスをP―1、P―2、・・・のように表記する。図3において、先ず始めに、ラジコン(ここではRCと略記)の電源をオン(ON)とする。RCとPCを通信ケーブル(以下、単にケーブル)で接続する(P−1)。RCの現在の設定情報(現在の設定値)をPCに読み込む(P−2)。PCの設定ソフトウエアによる設定値の変更を行う(P−3)。ここで、変更した設定値についてシミュレータソフトを用いて確認するのが望ましい。しかし、これは省略することもできる。
【0025】
設定値をRCに転送し(P−4)、RCのメモリに4の設定値格納部4Aに格納する(P−5)。ケーブルをRCから切り離しすることで(P−6)、飛行スタンバイとなる。送信機から飛行開始指令信号を送信して飛行を開始する(P−7)。
【0026】
飛行状態で、送信機から操縦制御信号が送信される(P―8)。操縦制御信号は線形で、一定ゲインである。送信された操縦制御信号はRC搭載の受信機で受信され、駆動制御回路で設定値による加工処理がなされる(P−9)。すなわち、受信機は受信信号を高周波増幅し、検波して、これをデコーダで復号する(P−91)。本実施例では、送信機で送信される操縦情報から復号される制御信号の種類は、スロットル(動力モータの回転制御)、ピッチ(cp:メインロータのピッチ)、エルロン、エレベータ、ラダーである。操縦制御信号はこれらの何れかで、複数の操縦制御信号は順次処理されるが、制御信号加工部(マイコン)の処理能力が高く、多重チャンネルを用いた指令信号送信システムを採用した場合には並列処理することもできる。
【0027】
復号されたこれらの制御信号は、メモリ4の設定値格納部4Aに格納されている対応の設定値で加工される(P−92)。RCは加工された制御信号に基づいてそれぞれの飛行制御部位を制御して操縦がなされる(P−93)。この駆動制御回路101での加工処理は、次の操縦制御信号の受信を待ち、新たな操縦制御信号が受信されたときは、(P−9)のプロセスを繰り返す。
【0028】
このようにして加工された操縦指令信号のそれぞれは、後段の駆動機構に供給され、それぞれの制御対象を制御する。すなわち、図2に示した例では、制御信号加工部5から動力モータ制御信号と4つの操舵信号が出力される。4つの操舵信号は、ここでは、コレクティブピッチ制御信号、ラダー制御信号、エルロン制御信号、エレベータ制御信号である。なお、動力モータ制御信号はスピードコントローラ6を通して動力モータ7に印加される。4つの操舵信号(制御信号)は、サーボモータ8、9、10、11に印加され、それぞれの制御部位を制御する。ラジコン模型の種類によって、動力モータ制御信号、操舵信号はそれぞれのラジコン模型の操縦に要する制御部に対応した制御信号に適合したものとされる。
【0029】
従来は、電気的な制御パラメータの設定は主に操縦に使う送信機に搭載された設定機能によって行ってきたが、送信機は大きさやコストの制限から設定機能の入力スイッチの数や設定情報を伝える表示装置の機能や大きさが限られており、その設定の入力が容易でなく、詳細な設定が行い難いなど、操作性や機能向上に限りがあった。これに対し、本実施例では、ラジコン模型に電気的な制御パラメータ設定値の格納部を設け、設定値の変更、操作はPC画面を参照しながら行い、その結果を通信ケーブルで接続したラジコン模型に転送する。このように、PCで操作した新しい設定情報は再び通信ケーブルを介してラジコン模型に格納し、その後の操縦に用いる。
【0030】
また、本実施例では、PCにラジコンヘリコプターの飛行制御のコンピュータ・シミュレータソフトを搭載し、設定情報をシミュレータの制御パラメータ設定値と連動させることにより送信機やPCのキーボードからPC画面上で設定情報が反映されたラジコンヘリコプターの飛行のコンピュータ・シミュレーションを行うことができる。これは、ラジコンヘリコプターだけに限らず、他のラジコン模型にも同様に適用できる。
【0031】
上記のように、送信機からの送信信号に含まれる操縦指令信号の指令値はリニアで、加工されていないパルス幅や直線特性の信号でよく、基本的には送信機のデフォルト値を用いることができる。この送信機からのリニアな操縦指令信号の指令値を、ラジコンヘリコプターの機体に搭載されたメモリの設定値格納部に格納された設定値を用いて、そのパルス幅の変更や曲線特性を加工して制御部位を制御する駆動信号とする。
【0032】
上記実施例では、ラジコンヘリコプターを例として説明したが、本発明は、これに限るものではなく、固定翼ラジコン機、ラジコン自動車、ラジコン船、その他の種々のラジコン模型にも同様に適用できるものであることは言うまでもない。
【図面の簡単な説明】
【0033】
【図1】本発明のラジコン模型の制御装置およびその制御パラメータ設定システムの説明図である。
【図2】本発明に係る制御パラメータ設定システムの一実施例を説明するシステム構成例のブロック図である。
【図3】本実施例における制御パラメータの設定、設定値による操縦指令信号の加工と飛行の手順を説明する流れ図である。
【図4】送信機を用いた従来の制御パラメ−タの設定、変更を行うようにした場合の説明図である。
【図5】図4のラジコンヘリコプターに搭載される受信機や駆動制御回路等の電子機器を説明する構成図である。
【符号の説明】
【0034】
1・・・送信機、2・・・受信機、3・・・パラメ−タ設定部、4・・・設定値格納部(メモリ)、5・・・制御信号加工部、6・・・スピードコントローラ、7・・・動力モータ、8〜11・・・操舵用サーボモータ、11,13・・・コネクタ、12・・・通信ケーブル、17・・・バッテリー、100・・・ラジコンヘリコプター、101・・・駆動制御回路、102・・・受信アンテナ、200・・・外部装置(パーソナル・コンピュータ:PC)、300・・・従来の送信機。
【技術分野】
【0001】
本発明は、ラジコン模型の制御に係り、特に当該模型が送信機から受信した指令信号に応じて姿勢や方向等を制御するための基準となる所望の操縦パラメ−タの設定や変更を容易にすると共に、送信機の負担を軽減して構成を簡素化したラジコン模型の制御装置および操縦パラメータ設定システムに関する。
【背景技術】
【0002】
遠隔制御されるヘリコプタや車両などの無線操縦模型はラジコンと愛称され、ホビーの世界だけでなく、多くの産業分野で広く利用されている。ラジコン模型には、受信機、サーボモータ、スピードコントローラ、ジャイロ、バッテリーなど、飛行または走行制御をするための複数の電子制御機器(操縦制御機器)が搭載されている。そして、その操舵角や動力の出力特性など、操縦制御の基準となるパラメータ(所望の操縦パラメータ)を適切に設定しておく必要がある。また、この操縦パラメ−タの設定値を任意に変更して種々の操縦パターンを実現することも行われている。
【0003】
ラジコン模型を飛行させ、あるいは走行させる場合、操舵角特性や動力の出力特性などを適切に設定し、あるいはこれを変更する必要がある。例えば、電動モータを動力源としたラジコンヘリコプターでは、その電動モータの軸出力特性は、リニアな変化ではなく、非線形な特性で変化するように設定することによって、良好な操縦性が得られる。また、操舵部位の変化特性のゲイン」や線形性を調整することでも、上記の電動モータの軸出力特性の設定と共にさらに良好な操縦性を得てラジコン模型を楽しむことができる。これら動力、操縦特性の設定は、サーボモータの駆動軸に対するサーボホーンの固定角、サーボホーンとリンケージワイヤの連結部位などの機械的な部分と、電気的な出力値など数値設定をプログラマブルに行う電気的な部分とに分かれる。近年、プログラマブルに行う部分の機能が充実しており、詳細で多様な設定が可能となっている。
【0004】
ラジコン模型に操縦パターン情報を記憶させたメモリ媒体を搭載し、このメモリ媒体に記憶した情報に従ってラジコン模型を操縦するものは、例えば特許文献1に開示がある。また、操縦者がラジコン模型の所望の操縦パラメ−タの設定、変更する従来技術としての特許文献2では、電動ラジコンカーの走行中に、メモリに格納されている動力モータの最大許容電流などの設定値を送信機からの指令で変更するようにしたものが開示されている。
【特許文献1】特開2006−346144号公報
【特許文献2】特開平6−312065号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
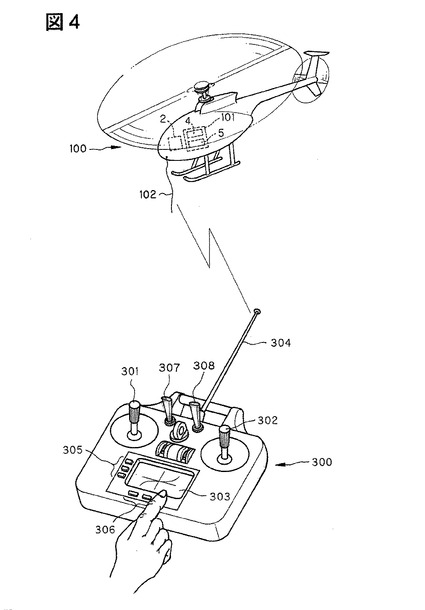
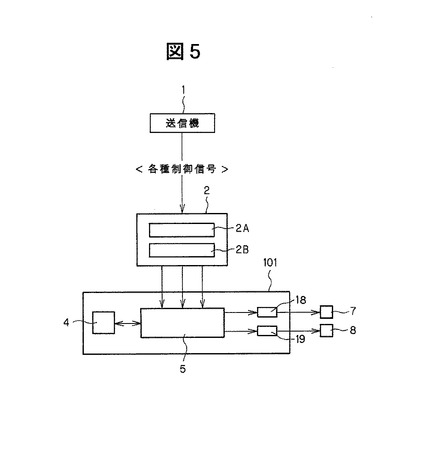
ここでは、仮に、前記した特許文献2に開示の設定情報の変更方法を用いて、多様なパラメータの設定値を変更し、新たに設定しようとした場合について説明する。図4は、送信機を用いた従来の所望の操縦パラメ−タの設定、変更を行うようにした場合の説明図である。ここでは、ラジコン模型として電動モータを動力としたラジコンヘリコプターを例として説明する。また、図5は、図4のラジコンヘリコプターに搭載される受信機や駆動制御回路等の電子機器の構成図である。図4中、ラジコンヘリコプター100は送信機300により操縦制御されている。ラジコンヘリコプター100には駆動制御回路101が搭載され、受信アンテナ102を介して受信機2で受信し、受信機2に有するデコード部で復号された操縦指令信号に基づいて動力モータ、コレクティブピッチ、ラダー、エレベータ、エルロン等の制御を行うサーボモータを駆動する。
【0006】
送信機300には、スティック301、302、設定される特性などの表示を行う表示器303、送信アンテナ304、電源スイッチ、チャンネル選択スイッチ307、308、その他のスイッチ305、306等が装備されている。このシステムで設定情報の変更を行う場合、例えばスイッチ類305あるいは306の何れかにより所望の特性を選んで表示器303に表示させて確認する。その後、スイッチ類305あるいは306の何れかで特定のチャンネルを選択し、スイッチ類307あるいは308の何れかを押すことでラジコンヘリコプター100に設定値の情報を送信する。
【0007】
ラジコンヘリコプター100は、送信された設定値の情報を受信機2で受信し、後述のRF部2Aで増幅・検波し、デコーダ2Bで復号してモータドライバの駆動信号、所定のサーボモータの駆動信号を生成する。すなわち、図5において、受信機2は高周波信号処理部(RF部)2Aで受信波の増幅、検波し、デコード部2Bで復号する。デコード部2Bで復号された操縦指令信号は中央制御装置(CPU)5で所定の制御信号形式に調整された後、それぞれのドライバ18、19を介して動力モータ7、操舵用のサーボモータ8等に供給される。この例では、動力モータ7の駆動信号は、メモリ4に格納された設定値にしたがって中央制御装置(CPU)5で加工される。この加工は、例えば操縦環境に応じた動力モータ7の最大電流値である。加工された操縦指令信号は、ドライバ14のモータ電流調整回路の上限値を調整し、動力モータ7はこの設定された最大電流値以内で駆動される。
【0008】
メモリ4への設定情報(制御パラメータ)の設定値の格納、変更は送信機の特定チャンネルで送信する。特許文献2に記載されたように、上記した操縦指令信号の一つの情報についての設定変更は、このような方法すなわち操縦中に特定のチャンネルから受信機を介してメモリに設定する方法で実用化できる。しかし、複数の設定情報について上記と同じような方法で制御パラメータを設定し、あるいは変更するためには、送信機300にそれ相当の回路、スイッチなどの機能部品を搭載する必要がある。
【0009】
このように、電気的な設定(操縦パラメ−タの設定値の変更、設定)は、従来から、主としてラジコン模型の操縦に使用する送信機に搭載された設定・調整機能により行われてきた。そのため、送信機に搭載される機能部品や回路部品等が多くなると共に、設定機能を実行するためのスイッチやダイヤル等の数、設定情報を送信するための機能部分、確認のためのディスプレイ等、多くの機能が要求され、送信機自体の規模が増大することになる。しかし、送信機の大きさには、自ずと限界があり、また操作が多様化することで操作性や機能性に限りがある。特許文献1に開示の設定値の設定方法は、送信機から特定のチャンネルを用いて動力モータの最大許容電流値の変更を行うものであり、制御信号をラジコン模型の動特性(ラジコン模型の種類や個々の機体に特有の操縦指令―動作特性)に適合するように加工する場合のように、多様な設定値を細かく設定あるいは変更することは極めて困難である。
【0010】
本発明の目的は、このような送信機を用いた設定変更では制限される多様な制御パラメ−タの設定値をラジコン模型に容易に設定し、あるいは容易に設定値の変更ができ、送信機側の負担を軽減し、操縦性能を向上したラジコン模型の制御装置およびその操縦パラメータ設定システムを提供することにある。
【課題を解決するための手段】
【0011】
本発明は、ラジコン模型の機体に搭載される駆動制御回路に制御パラメ−タの設定値を格納する領域を有するメモリを設ける。操縦パラメ−タの変更すなわち設定情報の操作は、この制御装置に通信ケーブルを介して接続した外部装置で行う。外部装置としては、パーソナル・コンピュータ(以下、単にPCとも称する)が好適であるが、同様の機能を備えた情報設定用の専用装置であってよい。PCはラジコン模型に設定すべき制御パラメ−タの設定値を表示画面上で所望の値に変更し、設定して新しい制御パラメ−タ(新たな設定値)を生成する。この新たな設定値は通信ケーブルを介してラジコン模型に搭載されている駆動制御回路のメモリに設けた設定値格納領域に直接転送して格納される。
【0012】
ラジコン模型の機体の一部には、上記のケーブルを接続するための外部入力端子を備えている。ラジコン模型を停止させた状態で、通信ケーブルでPCと接続して上記の操作を実行する。
【0013】
また、PCにはラジコン模型の操縦シミュレータソフトウエアを搭載することもできる。PC上で前記パラメータ情報の設定、変更に連動して変更される設定値に従って、操縦シミュレータソフトウエアを用いてバーチャル操縦を実行することもできる。
【発明の効果】
【0014】
所望の制御パラメ−タの設定値の変更と設定、メモリへの格納に送信機を必要としないことで、送信機の負担が軽減され、その構成も簡素化でき、小型化、軽量化が容易である。設定値の変更、設定の操作は、PCに情報設定用のソフトウエア(制御パラメータの設定・変更手順)をインストールすることで、さらに詳細な関連情報を表示画面上に分かりやすく表示させ、設定作業を容易にすることができる。
【0015】
また、PCにラジコン模型の飛行や、走行の操縦シミュレータソフトウエアを搭載することで、PC上で設定した仮想設定値を操縦シミュレータの制御パラメータ(設定値)と連動させることにより、送信機やキーボードからPC画面上で仮想設定値が反映されたラジコン模型の飛行、走行のコンピュータ・シミュレーションを行うことができ、実機に設定する前に設定値の確認、変更をすることがきる。
【0016】
さらに、ラジコン模型のパーツ(機能部品)の変更(パーツの特性情報の変更)を指示することで、操縦シミュレータソフトウエアにより、当該パーツの特性に応じた値に設定値を自動的に適合させて飛行、走行のコンピュータ・シミュレーションを行うことができ、新たなパーツによる操縦形態の確認をすることがきる。
【発明を実施するための最良の形態】
【0017】
以下、本発明の最良の実施形態につき、実施例の図面を参照して詳細に説明する。
【実施例】
【0018】
図1は、本発明のラジコン模型の制御装置およびその操縦パラメータ設定システムの説明図である。本実施例では、ラジコンヘリコプター100に搭載する駆動制御回路101に、中央制御装置(CPU)3と、設定値格納部(メモリ)4、制御信号加工部5、その他の回路を設けた。また、ラジコンヘリコプター100にはコネクタ12が設けられており、外部装置であるPCのコネクタ14との間を通信ケーブル13で接続されている。受信機2は、高周波(RF)処理部2A、検波部、デコーダ部2Bを有する。17はバッテリーである。
【0019】
図2は、本発明に係る操縦パラメータ設定システムの一実施例を説明するシステム構成例のブロック図である。図2には、図1で説明した受信機2と駆動制御回路101の詳細な構成例を示す。図2において、図1と同一符号は同一機能部分に対応する。また、参照符号6はスピードコントローラ、7は動力モータ、8〜11は操舵用サーボモータを示す。操舵用サーボモータ8、9、10、11は、例えばコレクティブピッチ、ラダー、エレベータ、エルロンの制御を行うサーボモータである。
【0020】
図1に示した構成において、ラジコンヘリコプター100の主電源を投入した状態で通信ケーブル12を介してPC200と直接接続する。PC200では、内蔵する操縦パラメータ操作プログラムにより所望の制御パラメータの設定値を生成する。制御パラメータは、例えば動力モータの駆動特性、コレクティブピッチ、ラダー、エレベータ、エルロン等の操作特性などである。生成された制御パラメータの設定値は、PC200から通信ケーブル12を介して設定値格納部であるメモリ4に転送され、格納される。なお、電源は通信ケーブルを介し、PC側から供給することも可能である。
【0021】
ラジコンヘリコプター100の動力モータ7の回転開始から浮揚、飛行、着陸の期間に、送信機1から送信される操縦指令信号を構成する各制御信号で変調した搬送波はラジコンヘリコプター100に搭載された受信機2で受信される。受信された搬送波は受信機2内の高周波処理部(RF部)2Aで増幅され、検波されてデコーダ部2Bで復号され、各種の操縦指令信号として再生される。再生された操縦指令信号は制御信号加工部5でメモリ4に格納されている設定値(設定特性)に従ってそれぞれ加工される。例えば、動力モータ7の操縦指令信号は設定値格納部4Aに格納されている設定値で規定のゲインや線形な入力が加工され、所望な非線形の出力特性となるように変化される。
【0022】
ここで、制御信号加工部5での操縦指令信号の加工の一例を処理の流れに従って説明する。設定情報をラジコンヘリコプター100に転送する前に、PC200では制御パラメータ操作プログラムを用いて所要の制御パラメータの設定、変更を行い、これを所定のファイルに設定情報として保持しておく。このとき、PC200をラジコンヘリコプター100に接続しておく必要は必ずしもないが、図1に示したように、両者を接続した状態で作業するのが作業効率上好ましい。
【0023】
先ず、PC200をラジコンヘリコプター100に接続した状態で、ラジコンヘリコプター100の主電源を投入、又は通信ケーブル13を介しPC200側から電源を供給して、駆動制御回路101を作動準備状態にする。次に、PC200の操縦パラメータ操作プログラムを立ち上げ、又は立ち上げた状態とし、前記したファイルに保持された設定情報をラジコンヘリコプター100のメモリ4に転送する。
【0024】
図3は、本実施例における制御パラメータの設定、設定値による操縦指令信号の加工と飛行の手順を説明する流れ図である。各処理のプロセスをP―1、P―2、・・・のように表記する。図3において、先ず始めに、ラジコン(ここではRCと略記)の電源をオン(ON)とする。RCとPCを通信ケーブル(以下、単にケーブル)で接続する(P−1)。RCの現在の設定情報(現在の設定値)をPCに読み込む(P−2)。PCの設定ソフトウエアによる設定値の変更を行う(P−3)。ここで、変更した設定値についてシミュレータソフトを用いて確認するのが望ましい。しかし、これは省略することもできる。
【0025】
設定値をRCに転送し(P−4)、RCのメモリに4の設定値格納部4Aに格納する(P−5)。ケーブルをRCから切り離しすることで(P−6)、飛行スタンバイとなる。送信機から飛行開始指令信号を送信して飛行を開始する(P−7)。
【0026】
飛行状態で、送信機から操縦制御信号が送信される(P―8)。操縦制御信号は線形で、一定ゲインである。送信された操縦制御信号はRC搭載の受信機で受信され、駆動制御回路で設定値による加工処理がなされる(P−9)。すなわち、受信機は受信信号を高周波増幅し、検波して、これをデコーダで復号する(P−91)。本実施例では、送信機で送信される操縦情報から復号される制御信号の種類は、スロットル(動力モータの回転制御)、ピッチ(cp:メインロータのピッチ)、エルロン、エレベータ、ラダーである。操縦制御信号はこれらの何れかで、複数の操縦制御信号は順次処理されるが、制御信号加工部(マイコン)の処理能力が高く、多重チャンネルを用いた指令信号送信システムを採用した場合には並列処理することもできる。
【0027】
復号されたこれらの制御信号は、メモリ4の設定値格納部4Aに格納されている対応の設定値で加工される(P−92)。RCは加工された制御信号に基づいてそれぞれの飛行制御部位を制御して操縦がなされる(P−93)。この駆動制御回路101での加工処理は、次の操縦制御信号の受信を待ち、新たな操縦制御信号が受信されたときは、(P−9)のプロセスを繰り返す。
【0028】
このようにして加工された操縦指令信号のそれぞれは、後段の駆動機構に供給され、それぞれの制御対象を制御する。すなわち、図2に示した例では、制御信号加工部5から動力モータ制御信号と4つの操舵信号が出力される。4つの操舵信号は、ここでは、コレクティブピッチ制御信号、ラダー制御信号、エルロン制御信号、エレベータ制御信号である。なお、動力モータ制御信号はスピードコントローラ6を通して動力モータ7に印加される。4つの操舵信号(制御信号)は、サーボモータ8、9、10、11に印加され、それぞれの制御部位を制御する。ラジコン模型の種類によって、動力モータ制御信号、操舵信号はそれぞれのラジコン模型の操縦に要する制御部に対応した制御信号に適合したものとされる。
【0029】
従来は、電気的な制御パラメータの設定は主に操縦に使う送信機に搭載された設定機能によって行ってきたが、送信機は大きさやコストの制限から設定機能の入力スイッチの数や設定情報を伝える表示装置の機能や大きさが限られており、その設定の入力が容易でなく、詳細な設定が行い難いなど、操作性や機能向上に限りがあった。これに対し、本実施例では、ラジコン模型に電気的な制御パラメータ設定値の格納部を設け、設定値の変更、操作はPC画面を参照しながら行い、その結果を通信ケーブルで接続したラジコン模型に転送する。このように、PCで操作した新しい設定情報は再び通信ケーブルを介してラジコン模型に格納し、その後の操縦に用いる。
【0030】
また、本実施例では、PCにラジコンヘリコプターの飛行制御のコンピュータ・シミュレータソフトを搭載し、設定情報をシミュレータの制御パラメータ設定値と連動させることにより送信機やPCのキーボードからPC画面上で設定情報が反映されたラジコンヘリコプターの飛行のコンピュータ・シミュレーションを行うことができる。これは、ラジコンヘリコプターだけに限らず、他のラジコン模型にも同様に適用できる。
【0031】
上記のように、送信機からの送信信号に含まれる操縦指令信号の指令値はリニアで、加工されていないパルス幅や直線特性の信号でよく、基本的には送信機のデフォルト値を用いることができる。この送信機からのリニアな操縦指令信号の指令値を、ラジコンヘリコプターの機体に搭載されたメモリの設定値格納部に格納された設定値を用いて、そのパルス幅の変更や曲線特性を加工して制御部位を制御する駆動信号とする。
【0032】
上記実施例では、ラジコンヘリコプターを例として説明したが、本発明は、これに限るものではなく、固定翼ラジコン機、ラジコン自動車、ラジコン船、その他の種々のラジコン模型にも同様に適用できるものであることは言うまでもない。
【図面の簡単な説明】
【0033】
【図1】本発明のラジコン模型の制御装置およびその制御パラメータ設定システムの説明図である。
【図2】本発明に係る制御パラメータ設定システムの一実施例を説明するシステム構成例のブロック図である。
【図3】本実施例における制御パラメータの設定、設定値による操縦指令信号の加工と飛行の手順を説明する流れ図である。
【図4】送信機を用いた従来の制御パラメ−タの設定、変更を行うようにした場合の説明図である。
【図5】図4のラジコンヘリコプターに搭載される受信機や駆動制御回路等の電子機器を説明する構成図である。
【符号の説明】
【0034】
1・・・送信機、2・・・受信機、3・・・パラメ−タ設定部、4・・・設定値格納部(メモリ)、5・・・制御信号加工部、6・・・スピードコントローラ、7・・・動力モータ、8〜11・・・操舵用サーボモータ、11,13・・・コネクタ、12・・・通信ケーブル、17・・・バッテリー、100・・・ラジコンヘリコプター、101・・・駆動制御回路、102・・・受信アンテナ、200・・・外部装置(パーソナル・コンピュータ:PC)、300・・・従来の送信機。
【特許請求の範囲】
【請求項1】
受信回路と、受信回路で受信した送信機の信号から操縦指令信号を復号するデコーダと、デコーダで復号した操縦指令信号に基づいて速度や姿勢を司る部位を制御するサーボモータとを有する駆動制御回路を備えたラジコン模型の制御装置であって、
前記駆動制御回路に、前記ラジコン模型の操縦特性を設定する制御パラメ−タの設定値を格納するための設定値格納部を有するメモリと、前記デコーダで復号した操縦指令信号を前記設定値格納部に格納された設定値を用いて加工する制御信号加工部とを有する中央制御装置を備え、
前記制御信号加工部で加工した操縦信号を前記速度や姿勢を司る部位を制御するコントローラやサーボモータに出力することを特徴とするラジコン模型の制御装置。
【請求項2】
請求項1において、
前記ラジコン機体に、該ラジコン機体の操作に先立って、前記メモリの前記設定値格納部に前記制御パラメ−タを供給するための外部装置と通信ケーブルを介して直接接続する外部入力端子を有することを特徴とするラジコン模型の制御装置。
【請求項3】
受信回路と、受信回路で受信した送信機の信号から操縦指令信号を復号するデコーダと、デコーダで復号した操縦指令信号に基づいて速度や姿勢を司る部位を制御するサーボモータとを有する駆動制御回路を備えたラジコン模型の操縦パラメータ設定システムであって、
前記ラジコン模型に、その操縦特性を設定する所望の制御パラメ−タの設定値を格納するための設定値格納部を有するメモリと、
前記メモリに対して外部から直接情報を転送するための外部入力端子と、
前記外部入力端子に通信ケーブルを介して直接接続される前記ラジコン模型の前記制御パラメ−タの設定値を保有する外部装置を備え、
前記外部装置から前記メモリに前記制御パラメ−タを転送し、格納することを特徴とするラジコン模型の操縦パラメータ設定システム。
【請求項4】
請求項3において、
前記外部装置はパーソナル・コンピュータであり、
前記パーソナル・コンピュータ上で、前記ラジコン模型の操縦に係る所望の制御パラメ−タの設定値を生成し、前記通信ケーブルを介して前記メモリの前記設定値格納部に転送し、格納することを特徴とするラジコン模型の操縦パラメータ設定システム。
【請求項5】
請求項4において、
前記パーソナル・コンピュータに、前記ラジコン模型の操縦シミュレータソフトウエアを搭載してなり、
前記パーソナル・コンピュータ上での前記制御パラメ−タの設定値の変更に連動して変更される新たな制御パラメ−タの設定値に従ってバーチャル操縦を該パーソナル・コンピュータ上で実行することを特徴とするラジコン模型の操縦パラメータ設定システム。
【請求項1】
受信回路と、受信回路で受信した送信機の信号から操縦指令信号を復号するデコーダと、デコーダで復号した操縦指令信号に基づいて速度や姿勢を司る部位を制御するサーボモータとを有する駆動制御回路を備えたラジコン模型の制御装置であって、
前記駆動制御回路に、前記ラジコン模型の操縦特性を設定する制御パラメ−タの設定値を格納するための設定値格納部を有するメモリと、前記デコーダで復号した操縦指令信号を前記設定値格納部に格納された設定値を用いて加工する制御信号加工部とを有する中央制御装置を備え、
前記制御信号加工部で加工した操縦信号を前記速度や姿勢を司る部位を制御するコントローラやサーボモータに出力することを特徴とするラジコン模型の制御装置。
【請求項2】
請求項1において、
前記ラジコン機体に、該ラジコン機体の操作に先立って、前記メモリの前記設定値格納部に前記制御パラメ−タを供給するための外部装置と通信ケーブルを介して直接接続する外部入力端子を有することを特徴とするラジコン模型の制御装置。
【請求項3】
受信回路と、受信回路で受信した送信機の信号から操縦指令信号を復号するデコーダと、デコーダで復号した操縦指令信号に基づいて速度や姿勢を司る部位を制御するサーボモータとを有する駆動制御回路を備えたラジコン模型の操縦パラメータ設定システムであって、
前記ラジコン模型に、その操縦特性を設定する所望の制御パラメ−タの設定値を格納するための設定値格納部を有するメモリと、
前記メモリに対して外部から直接情報を転送するための外部入力端子と、
前記外部入力端子に通信ケーブルを介して直接接続される前記ラジコン模型の前記制御パラメ−タの設定値を保有する外部装置を備え、
前記外部装置から前記メモリに前記制御パラメ−タを転送し、格納することを特徴とするラジコン模型の操縦パラメータ設定システム。
【請求項4】
請求項3において、
前記外部装置はパーソナル・コンピュータであり、
前記パーソナル・コンピュータ上で、前記ラジコン模型の操縦に係る所望の制御パラメ−タの設定値を生成し、前記通信ケーブルを介して前記メモリの前記設定値格納部に転送し、格納することを特徴とするラジコン模型の操縦パラメータ設定システム。
【請求項5】
請求項4において、
前記パーソナル・コンピュータに、前記ラジコン模型の操縦シミュレータソフトウエアを搭載してなり、
前記パーソナル・コンピュータ上での前記制御パラメ−タの設定値の変更に連動して変更される新たな制御パラメ−タの設定値に従ってバーチャル操縦を該パーソナル・コンピュータ上で実行することを特徴とするラジコン模型の操縦パラメータ設定システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−206667(P2008−206667A)
【公開日】平成20年9月11日(2008.9.11)
【国際特許分類】
【出願番号】特願2007−45454(P2007−45454)
【出願日】平成19年2月26日(2007.2.26)
【出願人】(591082340)田屋エンジニアリング株式会社 (4)
【Fターム(参考)】
【公開日】平成20年9月11日(2008.9.11)
【国際特許分類】
【出願日】平成19年2月26日(2007.2.26)
【出願人】(591082340)田屋エンジニアリング株式会社 (4)
【Fターム(参考)】
[ Back to top ]