
ラック搭載型機器の重心位置検出装置、重心位置検出方法、転倒予測装置
【課題】ラックキャビネットからユニットを引き出す際の、ラック搭載型機器全体の重心位置の変化を検出可能な技術を提供する。
【解決手段】ラックキャビネット9にユニット10を引き出し可能に搭載したラック搭載型機器8の重心位置検出装置は、ラックキャビネット9自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネットメモリと、ユニット10自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニットメモリと、ラックキャビネット9に対するユニット10の引出方向における相対的位置を検出するユニット位置検出器と、ラックキャビネット重心情報と、ユニット重心情報と、ユニット10の引出方向における相対的位置と、に基づいてラック搭載型機器8全体の重心位置を算出する重心位置算出器と、を備える。
【解決手段】ラックキャビネット9にユニット10を引き出し可能に搭載したラック搭載型機器8の重心位置検出装置は、ラックキャビネット9自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネットメモリと、ユニット10自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニットメモリと、ラックキャビネット9に対するユニット10の引出方向における相対的位置を検出するユニット位置検出器と、ラックキャビネット重心情報と、ユニット重心情報と、ユニット10の引出方向における相対的位置と、に基づいてラック搭載型機器8全体の重心位置を算出する重心位置算出器と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はラック搭載型機器の重心位置検出装置、重心位置検出方法、転倒予測装置に関する。
【背景技術】
【0002】
この種の技術として特許文献1は、例えば受配電盤などの重量物を搬送する際に、その転倒を予測して警報する転倒警報装置を開示している。この転倒警報装置では、重量物に傾斜センサを設けると共に、この重量物の傾斜角に応じて重量物が転倒する確率を示す転倒予測度データを予め用意しておき、重量物の傾斜角と転倒予測度データとを比較することによって重量物の転倒を予測することとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−56441号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ラックキャビネットにユニットが引き出し可能に搭載されたラック搭載型機器は、上記特許文献1に記載の受配電盤と異なり、設置後においても転倒する可能性がある。というのは、ラックキャビネットからユニットを引き出す際、ラック搭載型機器全体の重心位置が引き出し側に移行してしまうからである。
【0005】
そこで、一般に、ラックキャビネットには転倒防止措置としてスタビライザが用意されている。このスタビライザは、ラックキャビネットの下端に常設される場合と、必要に応じて適宜にラックキャビネットの下端に取り付けて使用する場合と、の二つの場合がある。何れの場合にせよ上記スタビライザはラック搭載型機器の転倒防止に一定の効果を奏していた。
【0006】
しかし、ラックキャビネット内でのユニットの配置態様の如何によってはそもそも上記のスタビライザが全く不要である場合がある。にも拘わらず、スタビライザがラックキャビネットの下端に常設されているとすると、スタビライザの設置スペースを単に浪費するばかりか、ハードウェア資源の全くの無駄をも招く結果となる。一方、スタビライザを随時、ラックキャビネットの下端に取り付けて使用するとなると、そもそもの前提としてスタビライザの要否を誤りなく見極める判断力が保守員に求められることになり、そこに不確実性が残る。
【0007】
このような種々の問題は、元を正せば、ラックキャビネットからユニットを引き出す際、ラック搭載型機器全体の重心位置がどのように変化するかを把握できていなかったからに他ならない。
【0008】
本願発明は、上記の事情に鑑みてなされたものであり、その主たる目的は、ラックキャビネットからユニットを引き出す際の、ラック搭載型機器全体の重心位置の変化を検出可能な、ラック搭載型機器の重心位置検出装置、重心位置検出方法、転倒予測装置を提供することにある。
【課題を解決するための手段】
【0009】
本願発明の第一の観点によれば、以下のように構成される、ラック搭載型機器の重心位置検出装置が提供される。即ち、ラック搭載型機器は、ラックキャビネットにユニットを引き出し可能に搭載したものである。ラック搭載型機器の重心位置検出装置は、前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出するユニット位置検出手段と、前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、を備えている。
【0010】
本願発明の第二の観点によれば、以下のように構成される、ラック搭載型機器の転倒予測装置が提供される。即ち、ラック搭載型機器は、ラックキャビネットにユニットを引き出し可能に搭載したものである。ラック搭載型機器の転倒予測装置は、前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出するユニット位置検出手段と、前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、前記ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測情報を記憶する転倒予測情報記憶手段と、前記ラック搭載型機器全体の重心位置と、前記転倒予測情報と、に基づいて前記ラック搭載型機器の転倒可能性を判定する転倒可能性判定手段と、を備えている。
【0011】
本願発明の第三の観点によれば、以下のように構成される、ラック搭載型機器の転倒予測装置が提供される。即ち、ラック搭載型機器は、ラックキャビネットにユニットを引き出し可能に搭載したものである。ラック搭載型機器の転倒予測装置は、前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、前記ラックキャビネットに対する、前記ラックキャビネットから最も引き出された状態の前記ユニットの、引出方向における相対的位置としての最大引出位置を記憶するユニット最大引出位置記憶手段と、前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの最大引出位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、前記ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測情報を記憶する転倒予測情報記憶手段と、前記ラック搭載型機器全体の重心位置と、前記転倒予測情報と、に基づいて前記ラック搭載型機器の転倒可能性を判定する転倒可能性判定手段と、を備えている。
【0012】
本願発明の第四の観点によれば、ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の重心位置は以下のような方法で検出される。即ち、第一のステップとして、前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出する。次に、第二のステップとして、前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する。
【発明の効果】
【0013】
本願発明によれば、前記ラックキャビネットから前記ユニットを引き出す際の、前記ラック搭載型機器全体の重心位置の変化を検出することができる。
【図面の簡単な説明】
【0014】
【図1】第一実施形態に係る重心位置検出装置の機能ブロック図
【図2】第二実施形態に係る転倒予測装置の機能ブロック図
【図3】第三実施形態に係る転倒予測装置の斜視図
【図4】上記転倒予測装置の機能ブロック図
【図5】ユニットメモリの具体的内容を示すブロック図
【図6】ラックキャビネットメモリの具体的内容を示すブロック図
【図7】転倒予測情報メモリの具体的内容を示すブロック図
【図8】第一転倒予測データのコンター図
【図9】第二転倒予測データのコンター図
【図10】上記転倒予測装置の制御フロー
【図11】ラック搭載型機器全体の重心位置(奥行方向)の算出方法の一例を示す図
【図12】ラック搭載型機器全体の重心位置(高さ方向)の算出方法の一例を示す図
【図13】ラック搭載型機器全体の重心位置(幅方向)の算出方法の一例を示す図
【図14】第一変形例に係る転倒予測装置の斜視図
【図15】第二変形例に係る転倒予測装置の斜視図
【図16】第四実施形態に係る転倒予測装置の機能ブロック図
【図17】上記転倒予測装置の制御フロー
【発明を実施するための形態】
【0015】
<第一実施形態>
以下、図1を参照しつつ、本願発明の第一実施形態を説明する。本実施形態に係る重心位置検出装置1は、ラック搭載型機器の重心位置を検出する装置である。ラック搭載型機器とは、ラックキャビネットにユニットを引き出し可能に搭載したものである。即ち、ラック搭載型機器とは、ラックキャビネットと、このラックキャビネットに引き出し自在に搭載された少なくとも1つ以上のユニットと、から構成されている。このラック搭載型機器としては、例えば、ラックキャビネットに中央処理装置や入出力装置などを搭載したサーバー機器や、ラックキャビネットに仮想テープ装置やディスクアレイ装置などを搭載したメインフレームなどといったラック搭載型情報処理機器が挙げられる。
【0016】
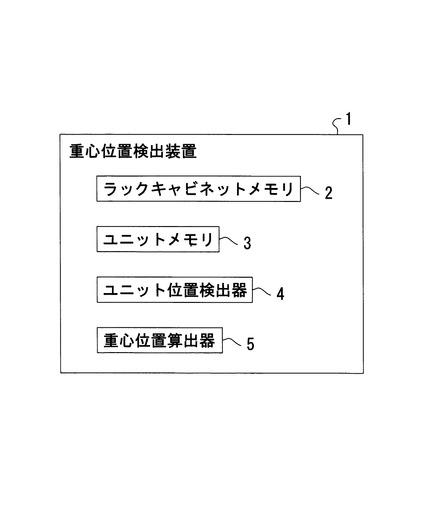
この重心位置検出装置1は、ラックキャビネットメモリ2(ラックキャビネット重心情報記憶手段)と、ユニットメモリ3(ユニット重心情報記憶手段)と、ユニット位置検出器4(ユニット位置検出手段)と、重心位置算出器5(重心位置算出手段)と、を備えて構成されている。
【0017】
ラックキャビネットメモリ2は、ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するものである。「ラックキャビネット自身の重心位置」とは、ラックキャビネットの基準点から見たときのラックキャビネットの重心位置を意味する。この「基準点」とは、本実施形態において、ラックキャビネットの前面と左側面と床面とが交差する地点を意味する。「床面」とは、ラック搭載型機器8が設置される土台を意味する。また、「ラックキャビネット自身の重量」とは、ユニットが搭載されていない状態におけるラックキャビネットの重量を意味する。上記のラックキャビネットメモリ2は、例えば、読み出し専用のROM(Read Only Memory)や読み書き自由のRAM(Random Access Memory)によって構成することができる。
【0018】
ユニットメモリ3は、ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するものである。「ユニット自身の重心位置」とは、ユニットの基準点から見たときのユニットの重心位置を意味する。この「基準点」とは、本実施形態において、ユニットの前面と左側面と底面とが交差する地点を意味する。「ユニットの搭載高さ位置」とは、上記の床面を基準としたユニットの底面の高さ位置を意味する。上記のユニットメモリ3は、例えば、読み出し専用のROMや読み書き自由のRAMによって構成することができる。
【0019】
ユニット位置検出器4は、ラックキャビネットに対するユニットの引出方向における相対的位置を検出するものである。即ち、ラックキャビネットからユニットを引き出し始めると、ラックキャビネットに対するユニットの引出方向における相対的位置は変化し始める。従って、上記のユニット位置検出器4は、ラックキャビネットに対するユニットの引出方向における相対的位置の変化を検出するものと換言することができる。「ラックキャビネットに対するユニットの引出方向における相対的位置」とは、ラックキャビネットの基準点から見たユニットの基準点の引出方向における相対的位置を意味する。
【0020】
上記のユニット位置検出器4は、公知のRFID(Radio Frequency IDentification)技術を応用することで実現することができる。即ち、一般的なRFID技術は、主であるトランスミッタ(別名:リーダ/ライタ、イニシエータ、質問器)と、従であるトランスポンダ(別名:RFIDタグ、非接触ICカード、ターゲット、応答器)と、から構成されている。そして、例えば、トランスミッタをラックキャビネットに、トランスポンダをユニットに取り付けるとする。この構成で、トランスミッタとトランスポンダとの間の距離を測定することにより、ラックキャビネットに対するユニットの引出方向における相対的位置を検出することができる。この「トランスミッタとトランスポンダとの間の距離(以下、単に距離とも称する。)」を測定する技術としては、3つの技術が知られている。第一の技術は、トランスミッタがトランスポンダから受信する信号の強さと、上記距離と、の間にある相関関係を利用して上記距離を推定する技術である。第二の技術は、トランスポンダ内に複雑な回路を用意することで実現される特殊な通信方式を利用する技術である。第三の技術は、上記の距離と遅延時間との比例関係を利用して上記距離を算出する技術である。ここで、「遅延時間」とは、電波がトランスミッタより発信されてからトランスポンダに到達し、反射波となってトランスミッタにまで戻るのに要する時間を意味する。上記のユニット位置検出器4は、上記の第一〜第三の何れの技術を採用しても実現することができるが、特に第三の技術を採用して実現することが好ましい。というのは、上記第三の技術は、トランスポンダの構成が簡素とできることに加え、トランスポンダが有する通信用コイルの軸線が何れの方向に傾いていたとしても、算出される上記の距離には殆ど悪影響を及ぼさないからである。
【0021】
重心位置算出器5は、ラックキャビネット重心情報と、ユニット重心情報と、ユニットの引出方向における相対的位置と、に基づいてラック搭載型機器全体の重心位置を算出するものである。従って、重心位置算出器5は、詳しく言えば、ラックキャビネット自身の重心位置と、ラックキャビネット自身の重量と、ユニット自身の重心位置と、ユニット自身の重量と、ラックキャビネットに対するユニットの引出方向における相対的位置と、に基づいてラック搭載型機器全体の重心位置を算出するものと言うことができる。なお、本明細書において、「ラック搭載型機器」と、「ラック搭載型機器全体」と、は実質的に同じ意味として用いるものとする。従って、「ラック搭載型機器」も「ラック搭載型機器全体」も、ラックキャビネットと、このラックキャビネットに引き出し自在に搭載された少なくとも1つ以上のユニットと、から構成されている点で同一構成である。上記の重心位置算出器5は、演算手段としてのCPU(Central Proccessing Unit)と、このCPUを重心位置算出器5として機能させるための制御プログラムと、によって実現することができる。
【0022】
(まとめ)
(1)以上説明したように、本実施形態においてラック搭載型機器の重心位置検出装置1は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット位置検出器4と、重心位置算出器5と、を備えている。以上の構成によれば、ラックキャビネットからユニットを引き出す際の、ラック搭載型機器全体の重心位置の変化を検出することができる。
【0023】
(12)なお、ラックキャビネットに搭載されるユニットの数は、1でも2以上であってもよい。
【0024】
<第二実施形態>
次に、図2を参照しつつ、本願発明の第二実施形態を説明する。本実施形態は、上記の第一実施形態に係る構成要素のすべてを取り入れている。上記第一実施形態の構成要素と対応する構成要素については原則として同一の符号を付すこととする。上記第一実施形態と相違する点を中心に説明し、重複する説明については適宜、割愛する。
【0025】
本実施形態に係る転倒予測装置100は、ラック搭載型機器の転倒を予測する装置である。
【0026】
この転倒予測装置100は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット位置検出器4と、重心位置算出器5と、転倒予測情報メモリ6(転倒予測情報記憶手段)と、転倒可能性判定器7(転倒可能性判定手段)と、を備えて構成されている。
【0027】
転倒予測情報メモリ6は、ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測データ(転倒予測情報)を記憶するものである。「転倒可能性」とは、ラック搭載型機器が転倒する可能性を意味し、例えば、10%や50%といった具体的なパーセンテイジを伴って表現されたり、Level1やLevel2といった予め区分けされた段階の何れかを特定するように表現されたりする。この転倒予測情報メモリ6は、例えば、読み出し専用のROMや読み書き自由のRAMによって構成することができる。
【0028】
転倒可能性判定器7は、ラック搭載型機器全体の重心位置と、転倒予測データと、に基づいてラック搭載型機器の転倒可能性を判定するものである。上記の転倒可能性判定器7は、演算手段としてのCPUと、このCPUを転倒可能性判定器7として機能させるための制御プログラムと、によって実現することができる。
【0029】
(まとめ)
(2)以上説明したように、本実施形態においてラック搭載型機器の転倒予測装置100は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット位置検出器4と、重心位置算出器5と、転倒予測情報メモリ6と、転倒可能性判定器7と、を備えている。以上の構成によれば、ラックキャビネットからユニットを引き出す際の、ラック搭載型機器の転倒可能性を予測することができる。
【0030】
<第三実施形態>
次に、図3〜13を参照しつつ、本願発明の第三実施形態を説明する。本実施形態は、上記の第二実施形態に係る構成要素のすべてを取り入れている。上記第二実施形態の構成要素と対応する構成要素については原則として同一の符号を付すこととする。上記第二実施形態と相違する点を中心に説明し、重複する説明については適宜、割愛する。
【0031】
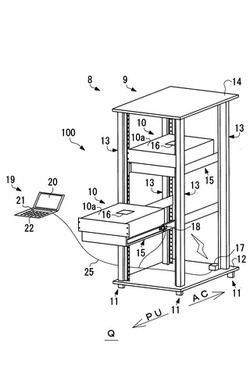
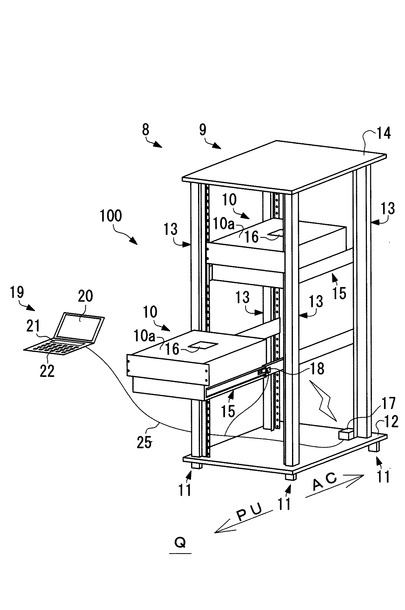
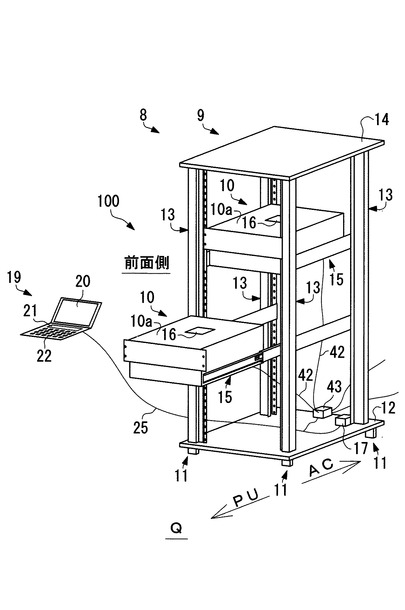
図3に示すように、本実施形態に係るラック搭載型機器8は、ラックキャビネット9と、このラックキャビネット9に引き出し自在に搭載された2つのユニット10と、を備えて構成されている。
【0032】
ラックキャビネット9は、脚部11を四隅に備える底板12と、底板12上に立てられる4本の支柱13と、底板12と支柱13を挟んで反対側に設けられる天板14と、を備えて構成されている。
【0033】
各ユニット10は、ラックキャビネット9内の所望の搭載高さ位置で、スライドレール15を介して支柱13に支持されている。このスライドレール15は、支柱13に対して締結固定される固定レールと、この固定レールに対して引き出し可能に支持される中間レールと、この中間レールに対して引き出し可能に支持される移動レールと、から構成されている。この構成で、上記の移動レールはユニット10の側面に対して締結固定され、もって、ユニット10はラックキャビネット9に支持されるようになっている。なお、図3に示す2つのユニット10のうち上段のユニット10はラックキャビネット9内に収容された状態となっており、下段のユニット10はラックキャビネット9から最も引き出された状態となっている。
【0034】
ここで、ユニット10がラックキャビネット9から引き出される方向を「引出方向PU」と定義する。同様に、ユニット10をラックキャビネット9内へ収容する方向を「収容方向AC」と定義する。また、ユニット10はラックキャビネット9の前面から引き出すものである。
【0035】
さて、各ユニット10の上面10aには、トランスポンダ16が貼り付けられている。一方で、ラックキャビネット9の支柱13のうち背面側の支柱13には、本実施形態において1つのトランスミッタ17が取り付けられている。トランスポンダ16とトランスミッタ17は、公知のRFID技術を利用して双方向通信可能となっている。
【0036】
また、各ユニット10に設けられたスライドレール15には、ラックキャビネット9からのユニット10のそれ以上の引き出しを実質的に禁止することができるブレーキ機構18が設けられている。このブレーキ機構18は、ソレノイド26(図4を併せて参照)と、このソレノイドの通電によって直線的に往復可能な可動部としてのロッドと、から構成されている。そして、上記のロッドの先端には例えば天然ゴムや合成ゴムといった摩擦体が取り付けられている。この構成で、ブレーキ機構18のソレノイド26(図4を併せて参照)が通電されると、ロッドがスライドレール15に向かって進出し、摩擦体がスライドレール15の移動レールに突き当たる。これにより、ラックキャビネット9からのユニット10の引き出しに対して、この引き出しを実質的に禁止するような抵抗が付される。
【0037】
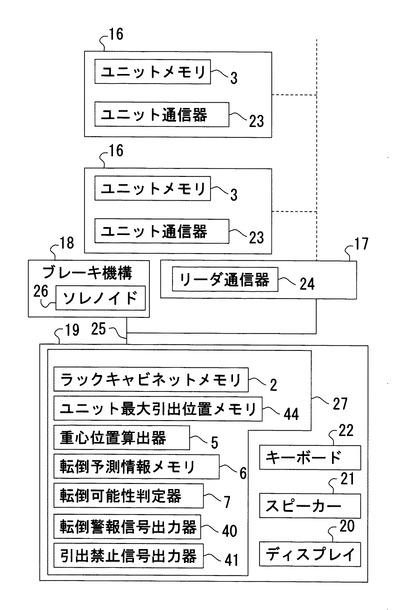
ラックキャビネット9の近くには、ノート型パーソナルコンピュータ19が設置されている。このノート型パーソナルコンピュータ19は、表示手段としての液晶表示ディスプレイ20と、音声発生手段としてのスピーカー21と、入力手段としてのキーボード22(取得手段)と、図4に示す制御部27と、を含んで構成されている。制御部27は、図4に示すように、ラックキャビネットメモリ2と、重心位置算出器5と、転倒予測情報メモリ6と、転倒可能性判定器7と、転倒警報信号出力器40と、引出禁止信号出力器41と、によって構成されている。この制御部は、ノート型パーソナルコンピュータ19が有する図示しないCPUやROM、RAMに加えて、補助記憶装置としてのHDD(Hard disk drive)によって実現されている。本実施形態において、転倒警報出力手段は、液晶表示ディスプレイ20と、スピーカー21と、転倒警報信号出力器40と、によって実現されている。また、引出禁止手段は、ブレーキ機構18と、引出禁止信号出力器41と、によって実現されている。
【0038】
転倒警報信号出力器40は、ラック搭載型機器8の転倒可能性に基づいて、液晶表示ディスプレイ20やスピーカー21に対して転倒警報信号を出力する。これにより、液晶表示ディスプレイ20に転倒警報を表示させたり、スピーカー21から転倒警報音を発生させたりすることができるようになっている。
【0039】
引出禁止信号出力器41は、ラック搭載型機器8の転倒可能性に基づいてブレーキ機構18に対して引出禁止信号を出力する。これにより、ブレーキ機構18に、ラックキャビネット9からのユニット10のそれ以上の引き出しを実質的に禁止させることができるようになっている。
【0040】
図4に示すように、トランスポンダ16は、ユニットメモリ3と、ユニット通信器23と、を含んで構成されている。ユニット通信器23は、トランスミッタ17が有するリーダ通信器24と双方向通信するためのものである。トランスミッタ17は、ユニット位置検出器4と、リーダ通信器24と、を含んで構成されている。そして、ユニット通信器23とリーダ通信器24との存在により、トランスポンダ16とトランスミッタ17とは双方向通信可能となっている。
【0041】
上記のトランスミッタ17やブレーキ機構18は、例えばシリアルケーブルなどの信号線25によってノート型パーソナルコンピュータ19に接続されている。
【0042】
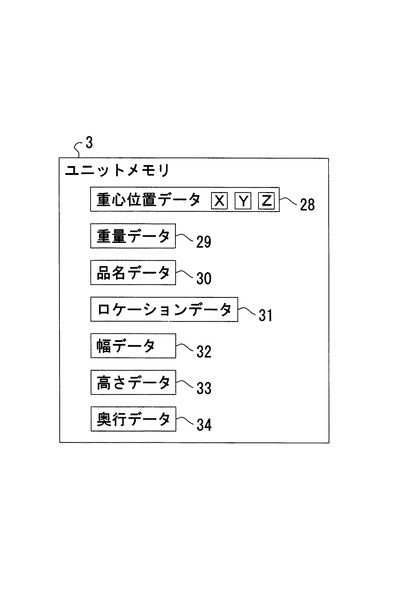
図5に示すように、ユニットメモリ3には、ラック搭載型機器8の初期出荷時に、重心位置データ28と、重量データ29と、品名データ30と、ロケーションデータ31と、幅データ32と、高さデータ33と、奥行データ34と、が記憶される。「重心位置データ28」とは、ユニット10自身の重心位置に関するデータであって、前述した基準点からのX値と、Y値と、Z値と、から構成されている。X値は、ユニット10の前面から重心位置までの奥行方向における距離を意味する。同様に、Y値は、ユニット10の左側面から重心位置までの幅方向における距離を意味する。同様に、Z値は、ユニット10の底面から重心位置までの高さ方向における距離を意味する。「重量データ29」とは、ユニット10の重量に関するデータである。「品名データ30」とは、ラック搭載型機器8に複数のユニット10が搭載された際、特定のユニット10を識別するための情報である。「ロケーションデータ31」とは、ユニット10の搭載高さ位置に関するデータである。「幅データ32」とは、ユニット10の幅に関するデータである。「高さデータ33」とは、ユニット10の高さに関するデータである。「奥行データ34」とは、ユニット10の奥行に関するデータである。
【0043】
図6に示すように、ラックキャビネットメモリ2には、ラック搭載型機器8の初期出荷時に、重心位置データ35と、重量データ36と、が記憶される。「重心位置データ35」とは、ラックキャビネット9自身の重心位置に関するデータであって、前述した基準点からのX値と、Y値と、Z値と、から構成されている。X値は、ラックキャビネット9の前面から重心位置までの奥行方向における距離を意味する。同様に、Y値は、ラックキャビネット9の左側面から重心位置までの幅方向における距離を意味する。同様に、Z値は、床面Q(図3を併せて参照)から重心位置までの高さ方向における距離を意味する。「重量データ36」とは、ラックキャビネット9の重量に関するデータである。
【0044】
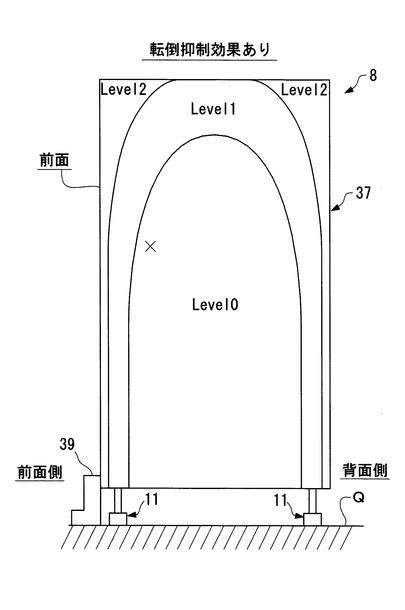
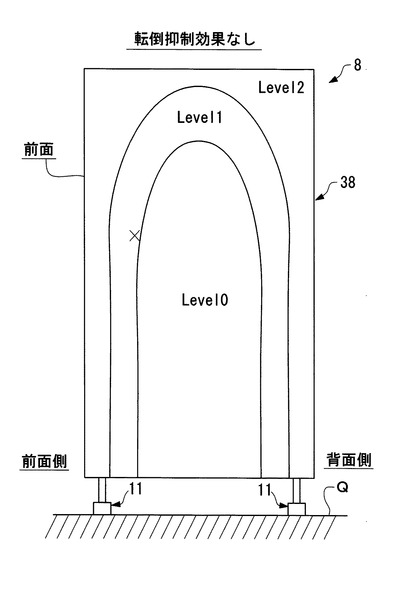
図7に示すように、転倒予測情報メモリ6には、ラック搭載型機器8の初期出荷時に、第1転倒予測データ37(転倒予測情報、第1転倒予測情報)と、第2転倒予測データ38(転倒予測情報、第2転倒予測情報)と、が記憶される。第1転倒予測データ37を図8に、第2転倒予測データ38を図9に、夫々示す。図8には転倒抑制対策が施されたラック搭載型機器8が側面視で示されており、図9には転倒抑制効果が施されていないラック搭載型機器8が同様に側面視で示されている。即ち、図8に示すラック搭載型機器8の前面には、ラック搭載型機器8の転倒を抑制するためのスタビライザ39がその転倒抑制効果が発揮されるように取り付けられている。換言すれば、図8に示すラック搭載型機器8の前面と、床面Qと、の間にはスタビライザ39が設けられており、もって、ラック搭載型機器8は床面Qに対して強力に固定されている。一方、図9に示すラック搭載型機器8にはスタビライザ39が取り付けられていない。図8及び図9において、Level0、Level1、Level2といったラベルは、ラック搭載型機器8の転倒可能性をラック搭載型機器8の重心位置に応じて3段階に分けて表現したものである。Level0はラック搭載型機器8の転倒可能性が10%以下であることを意味し、Level1はラック搭載型機器8の転倒可能性が10〜30%であることを意味し、Level2はラック搭載型機器8の転倒可能性が30%以上であることを意味している。図8と図9に示される各転倒予測データを比較すれば判る通り、図9の第2転倒予測データ38は、図8の第1転倒予測データ37と比較して転倒可能性が高められている。具体的に言えば、図9におけるLevel0の領域は図8におけるそれと比較して狭く、図9におけるLevel2の領域は図8におけるそれと比較して広い。図8及び図9において、X印はラック搭載型機器8の重心位置を例示している。図8及び図9を見比べることで、例えラック搭載型機器8の重心位置が同じであっても、転倒抑制効果の有無によってラック搭載型機器8の転倒可能性が異なることが判る。なお、保守員は、スタビライザ39が図8のようにラック搭載型機器8に取り付けられているか否か(換言すればラック搭載型機器8の転倒を抑制するためのスタビライザ39による転倒抑制効果の発揮の有無)をキーボード22(図3を併せて参照)を介してノート型パーソナルコンピュータ19の制御部27に入力できるようになっており、入力された情報はRAMに保存される。
【0045】
(作動)
次に、転倒予測装置100の作動を説明する。
【0046】
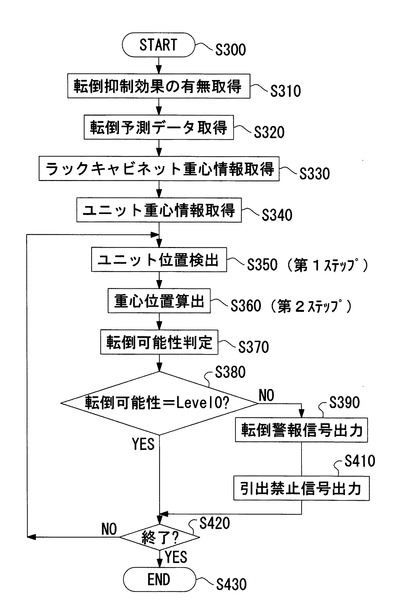
先ず、転倒予測装置100の電源を投入すると(S300)、制御部27は、転倒抑制効果の有無の入力を待つ(S310)。このとき、制御部27は、保守員に対し、転倒抑制効果の有無の入力を促す画像を液晶表示ディスプレイ20に表示させる。保守員がキーボード22を操作して転倒抑制効果の有無を制御部27に入力すると、その入力された情報は制御部27のRAMに保存される。
【0047】
次に、制御部27は、転倒抑制効果の有無に関する情報に基づいて転倒予測データを転倒予測情報メモリ6から読み込んで取得し(S320)、RAMに保存する。即ち、転倒抑制効果が有る場合は、制御部27は、転倒予測情報メモリ6から第1転倒予測データ37を読み込んで取得する。一方、転倒抑制効果が無い場合は、制御部27は、転倒予測情報メモリ6から第2転倒予測データ38を読み込んで取得する。
【0048】
次に、制御部27は、ラックキャビネットメモリ2からラックキャビネット重心情報を読み込んで取得し(S330)、RAMに保存する。
【0049】
次に、制御部27は、各ユニットメモリ3からユニット重心情報を読み込んで取得し(S340)、例えば下記表1のようにテーブル形式でRAMに保存する。
【0050】
【表1】

【0051】
次に、ユニット位置検出器4はラックキャビネット9に対する各ユニット10の引出方向における相対的位置を検出し(S350)、検出された各ユニット10の相対的位置に関する情報は制御部27に送信されて、制御部27のRAMに保存される。
【0052】
次に、重心位置算出器5は、ラックキャビネット9自身の重心位置と、ラックキャビネット9自身の重量と、ユニット10自身の重心位置と、ユニット10自身の重量と、ラックキャビネット9に対するユニット10の引出方向における相対的位置と、に基づいてラック搭載型機器8全体の重心位置を算出する(S360)。
【0053】
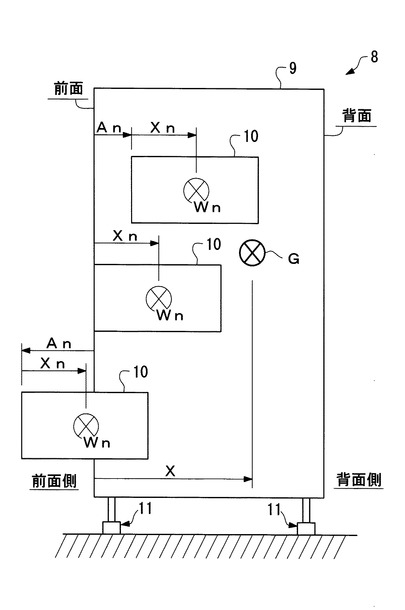
(奥行方向:図11参照)
即ち、重心位置算出器5は、制御部27のRAMに記憶されている各種データを下記式(1)に代入することで、ラック搭載型機器8全体の重心位置のうち奥行方向における重心位置を算出する。
【0054】
【0055】
上記式1における各変数は下記の通りである。
X:ラック搭載型機器8の基準点から見たときのラック搭載型機器8の重心Gの奥行方向における位置(ただし、ラック搭載型機器8の基準点とは、ラックキャビネット9の基準点と同じ地点を意味する。)
W0:ラックキャビネット9自身の重量
X0:ラックキャビネット9自身の奥行方向における重心位置
Wn:ユニット10自身の重量(ただし、nは1から始まる正の数であって、上記表1のIDNo.を示す。以下同様である。)
Xn:ユニット10自身の奥行方向における重心位置
An:ラックキャビネット9の基準点に対するユニット10の基準点の奥行方向における相対的位置(なお、ユニット位置検出器4による検出結果はこの変数Anに反映されることとなる。)
【0056】
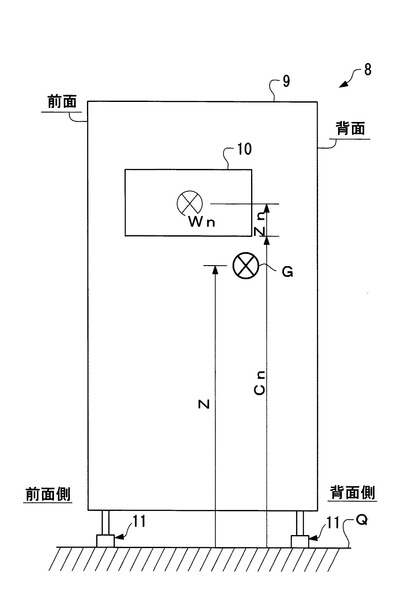
(高さ方向:図12)
同様に、重心位置算出器5は、制御部27のRAMに記憶されている各種データを下記式(2)に代入することで、ラック搭載型機器8全体の重心位置のうち高さ方向における重心位置を算出する。
【0057】
【0058】
上記式2における各変数は下記の通りである。
Z:ラック搭載型機器8の基準点から見たときのラック搭載型機器8の重心Gの高さ方向における位置
W0:ラックキャビネット9自身の重量
Z0:ラックキャビネット9自身の高さ方向における重心位置
Wn:ユニット10自身の重量
Zn:ユニット10自身の高さ方向における重心位置
Cn:ラックキャビネット9の基準点に対するユニット10の基準点の高さ方向における相対的位置(なお、上述した表1のロケーションデータ31はこの変数Cnに反映されることとなる。)
【0059】
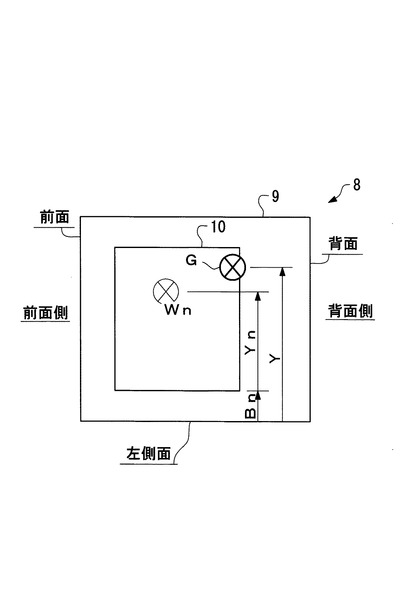
(幅方向:図13)
同様に、重心位置算出器5は、制御部27のRAMに記憶されている各種データを下記式(3)に代入することで、ラック搭載型機器8全体の重心位置のうち幅方向における重心位置を算出する。
【0060】
【0061】
上記式3における各変数は下記の通りである。
Y:ラック搭載型機器8の基準点から見たときのラック搭載型機器8の重心Gの幅方向における位置
W0:ラックキャビネット9自身の重量
Y0:ラックキャビネット9自身の幅方向における重心位置
Wn:ユニット10自身の重量
Yn:ユニット10自身の幅方向における重心位置
Bn:ラックキャビネット9の基準点に対するユニット10の基準点の幅方向における相対的位置
【0062】
次に、転倒可能性判定器7は、ラック搭載型機器8全体の重心位置と、転倒予測データと、に基づいてラック搭載型機器8の転倒可能性を判定する(S370)。ここで、仮に、上記転倒予測データとして図8に示す第1転倒予測データ37が制御部27のRAMに記憶されているものとする。この場合、転倒可能性判定器7は、重心位置算出器5が算出したラック搭載型機器8全体の重心位置が図8の第1転倒予測データ37でどの領域に属するかを判定し、その所属先の領域に割り当てられた転倒可能性を取得し、取得した転倒可能性をRAMに保存する。本実施形態では、転倒可能性がLevel0、Level1、Level2のように段階的に識別されるようになっているので、上記のRAMには何れかのラベルが保存されることになる。
【0063】
次に、制御部27は、上記のRAMに記憶されている転倒可能性がLevel0であるか否かを判定する(S380)。この転倒可能性がLevel0でなかった場合は(S380:NO)、転倒警報信号出力器40は、スピーカー21に転倒警報信号を出力する(S390)。同様に、転倒警報信号出力器40は、液晶表示ディスプレイ20に転倒警報信号を出力する(S390)。同様に、引出禁止信号出力器41は、ブレーキ機構18に対して引出禁止信号を出力する(S410)。これにより、保守員に対しては強力に注意を促すと共に、ラックキャビネット9からのユニット10のそれ以上の引き出しが実質的に禁止される。その後、処理はS420へと進む。一方、転倒可能性がLevel0であった場合は(S380:YES)、処理は同様にS420へと進む。
【0064】
そして、処理を終了するための入力が保守員によってなされるまで、S350〜S420の処理を例えばおおよそ20[sec]間隔で繰り返し(S420:NO)、上記入力が保守員によってなされたら(S420:YES)、制御部27は処理を終了する(S430)。上述した制御によれば、転倒可能性がLevel2となるのを確実に回避することができる。
【0065】
<まとめ>
(2)以上説明したように、本実施形態においてラック搭載型機器8の転倒予測装置100は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット位置検出器4と、重心位置算出器5と、転倒予測情報メモリ6と、転倒可能性判定器7と、を備えている。以上の構成によれば、ラックキャビネット9からユニット10を引き出す際の、ラック搭載型機器8の転倒可能性を予測することができる。勿論、ラックキャビネット9から複数のユニット10が同時に引き出されるような場合にも、ラック搭載型機器8の転倒可能性を予測することができる。
【0066】
(3)また、転倒予測データは、第1転倒予測データ37と、この第1転倒予測データ37と比較して転倒可能性が高められた第2転倒予測データ38と、を含んでいる。転倒予測装置100は、ラック搭載型機器8の転倒を抑制するためのスタビライザ39による転倒抑制効果の発揮の有無を取得するキーボード22を更に備える。転倒可能性判定器7は、スタビライザ39による転倒抑制効果が発揮されている場合は第1転倒予測データ37を転倒予測データとして使用し、スタビライザ39による転倒抑制効果が発揮されていない場合は第2転倒予測データ38を転倒予測データとして使用するようになっている。即ち、スタビライザ39による転倒抑制効果の発揮の有無によってラック搭載型機器8の転倒可能性には変化が生ずる。従って、以上の構成によれば、スタビライザ39による転倒抑制効果が発揮されているいないに拘わらず、ラック搭載型機器8の転倒可能性を高い精度で予測することが可能となる。
【0067】
(4)また、上記の転倒予測データ(第1転倒予測データ37又は第2転倒予測データ38)の上記転倒可能性は、図8や図9に示すように、ラック搭載型機器8全体の重心位置に応じて少なくとも3段階に区分けされている。以上の構成によれば、ラック搭載型機器8の転倒可能性をきめ細かく予測することができる。
【0068】
(5)また、転倒予測装置100は、ラック搭載型機器8の上記転倒可能性に基づいて転倒警報を出力する転倒警報出力手段を更に備えている。以上の構成によれば、保守員に対してラック搭載型機器8の転倒に対する注意を促すことができる。
【0069】
(6、7)また、転倒警報出力手段は、聴覚的な手段により転倒警報を出力可能に構成されていてもよいし、視覚的な手段により転倒警報を出力可能に構成されていてもよい。
【0070】
(8)また、転倒予測装置100は、ラック搭載型機器8の上記転倒可能性に基づいてユニット10のそれ以上の引き出しを実質的に禁止する引出禁止手段を更に備えている。以上の構成によれば、ラック搭載型機器8の転倒を防止することができる。
【0071】
(9)また、引出禁止手段は、ラックキャビネット9からのユニット10の引き出しに対して、この引き出しを実質的に禁止するような抵抗を付するように構成されている。以上の構成によれば、引出禁止手段をシンプルな原理で実現することができる。
【0072】
(13)また、ラックキャビネット9に搭載されるユニット10の数は、図3に示すように2つであることに代えて、1つでも3つ以上でもよい。
【0073】
また、重心位置算出器5によるラック搭載型機器8全体の重心位置の算出は、好ましくは、1[sec]に1回、行われることが好ましい。ラック搭載型機器8の転倒を確実に回避できるからである。
【0074】
<第一変形例>
次に、図14に基づいて、上記第三実施形態の第一変形例を説明する。即ち、上記第三実施形態では、引出禁止手段は、引出禁止信号出力器41と、ブレーキ機構18と、によって構成されるとした。しかし、これに代えて、本変形例では、引出禁止手段は、前述の引出禁止信号出力器41と、接続ロープ42(接続部材)と、ロック機構43と、を含んで構成される。上記の接続ロープ42は、ラックキャビネット9から引き出される各ユニット10と一緒に動くように一端が各ユニット10に接続されている。そして、接続ロープ42の他端は上記のロック機構43に挿入されている。ロック機構43は、挿入されている接続ロープ42の動きを許容し及び実質的に禁止することができるようになっている。即ち、ロック機構43は、引出禁止信号出力器41から引出禁止信号を受信すると、接続ロープ42の動きを実質的に禁止するように構成されている。
【0075】
(まとめ)
(10)以上説明したように、引出禁止手段は、ラックキャビネット9から引き出されるユニット10と一緒に動くようにユニット10に接続された接続ロープ42と、接続ロープ42の動きを許容し及び実質的に禁止することができるロック機構43と、を含んで構成されている。以上の構成によれば、引出禁止手段をシンプルな原理で実現することができる。
【0076】
<第二変形例>
次に、図15に基づいて、上記第三実施形態の第二変形例を説明する。即ち、上記第三実施形態では、図3に示すようにトランスミッタ17を1つ、設けることとした。しかし、これに代えて、本変形例では、図15に示すように、トランスミッタ17を複数で設けることとしている。図15の例では、トランスミッタ17は平面視で対角線上に配置される2本の支柱13の上下端に夫々、設けられている。このようにトランスミッタ17の設置数を増やすことで、ラックキャビネット9に対するユニット10の引出方向における相対的位置を精度よく把握することが可能となる。また、複数のトランスミッタ17の設置位置を図15に示すように、ラックキャビネット9に収容された状態のユニット10を取り囲むように配置することで、ラックキャビネット9に対するユニット10の引出方向における相対的位置を一層高い精度で把握することが可能となる。
【0077】
<第四実施形態>
次に、図16及び図17を参照しつつ、本願発明の第四実施形態を説明する。本実施形態は、上記の第二実施形態に係る構成要素のすべてを取り入れている。上記第三実施形態の構成要素と対応する構成要素については原則として同一の符号を付すこととする。上記第三実施形態と相違する点を中心に説明し、重複する説明については適宜、割愛する。
【0078】
上記第三実施形態では、ユニット位置検出器4を設け、重心位置算出器5は、このユニット位置検出器4によって検出されたユニット10の引出方向における相対的位置を用いてラック搭載型機器8全体の重心位置を算出することとした。しかし、これに代えて、本実施形態では、ユニット最大引出位置メモリ44(ユニット最大引出位置記憶手段)を設けている。このユニット最大引出位置メモリ44はノート型パーソナルコンピュータ19の制御部27に設けられており、RAMやROMによって実現されている。このユニット最大引出位置メモリ44には、ラックキャビネット9に対するユニット10の所定の相対的位置を記憶が記憶されている。詳しくは、ユニット最大引出位置メモリ44には、ラックキャビネット9に対する、ラックキャビネット9から最も引き出された状態のユニット10の、引出方向における相対的位置としての最大引出位置が記憶されている。そして、重心位置算出器5は、ユニット位置検出器4によって検出された相対的位置に代えて、ユニット最大引出位置メモリ44から読み込んで取得した最大引出位置を用いてラック搭載型機器8全体の重心位置を算出するようになっている。
【0079】
(作動)
次に、転倒予測装置100の作動を説明する。
【0080】
先ず、転倒予測装置100の電源を投入すると(S300)、制御部27は、転倒抑制効果の有無の入力を待つ(S310)。このとき、制御部27は、保守員に対し、転倒抑制効果の有無の入力を促す画像を液晶表示ディスプレイ20に表示させる。保守員がキーボード22を操作して転倒抑制効果の有無を制御部27に入力すると、その入力された情報は制御部27のRAMに保存される。
【0081】
次に、制御部27は、転倒抑制効果の有無に関する情報に基づいて転倒予測データを転倒予測情報メモリ6から読み込んで取得し(S320)、RAMに保存する。
【0082】
次に、制御部27は、ラックキャビネットメモリ2からラックキャビネット重心情報を読み込んで取得し(S330)、RAMに保存する。
【0083】
次に、制御部27は、各ユニットメモリ3からユニット重心情報を読み込んで取得し(S340)、例えば下記表1のようにテーブル形式でRAMに保存する。
【0084】
【表1】
【0085】
次に、制御部27は、ユニット最大引出位置メモリ44から最大引出位置に関する情報を読み込んで取得し(S350)、RAMに保存する。
【0086】
次に、重心位置算出器5は、ラックキャビネット9自身の重心位置と、ラックキャビネット9自身の重量と、ユニット10自身の重心位置と、ユニット10自身の重量と、最大引出位置と、に基づいてラック搭載型機器8全体の重心位置を算出する(S360)。
【0087】
次に、転倒可能性判定器7は、ラック搭載型機器8全体の重心位置と、転倒予測データと、に基づいてラック搭載型機器8の転倒可能性を判定する(S370)。
【0088】
次に、制御部27は、上記のRAMに記憶されている転倒可能性がLevel0であるか否かを判定する(S380)。転倒可能性がLevel0でなかった場合は(S380:NO)、転倒警報信号出力器40は、スピーカー21に転倒警報信号を出力する(S390)。同様に、転倒警報信号出力器40は、液晶表示ディスプレイ20に転倒警報信号を出力する(S390)。その後、制御部27は、処理を終了する(S430)。一方、転倒可能性がLevel0であった場合は(S380:YES)、制御部27は、ユニット10の引き出しも、ユニット10の新規搭載も問題ない旨を液晶表示ディスプレイ20に適宜表示後、処理を終了する(S430)。
【0089】
(まとめ)
(11)以上説明したように、本実施形態における転倒予測装置100は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット最大引出位置メモリ44と、重心位置算出器5と、転倒予測情報メモリ6と、転倒可能性判定器7と、を備えている。以上の構成によれば、ラックキャビネット9からユニット10を実際に引き出す前に、引き出したときのラック搭載型機器8の転倒可能性を予測することができる。また、ラックキャビネット9にユニット10を搭載するときは、搭載直後、ユニット10はラックキャビネット9から最大限引き出された状態となっている。従って、以上の構成によれば、ラックキャビネット9にユニット10を実際に搭載する前に、搭載直後のラック搭載型機器8の転倒可能性を予測することができる。
【0090】
上記構成の付随的な効果としては、このようにラック搭載型機器8の転倒可能性を多面的にチェックできるので、ラック搭載型機器8の出荷前にスタビライザ39の要否を把握することができる。従って、スタビライザ39がなくてもラック搭載型機器8の転倒可能性が低いと確認できたときは、スタビライザ39を出荷対象から除外することが可能となり、もって、スタビライザ39の設置工数削減や設置スペース削減、ハードウェア資源の節約に大きく寄与することとなる。
【符号の説明】
【0091】
1 重心位置検出装置
2 ラックキャビネットメモリ(ラックキャビネット重心情報記憶手段)
3 ユニットメモリ(ユニット重心情報記憶手段)
4 ユニット位置検出器(ユニット位置検出手段)
5 重心位置算出器(重心位置算出手段)
100 転倒予測装置
【技術分野】
【0001】
本発明はラック搭載型機器の重心位置検出装置、重心位置検出方法、転倒予測装置に関する。
【背景技術】
【0002】
この種の技術として特許文献1は、例えば受配電盤などの重量物を搬送する際に、その転倒を予測して警報する転倒警報装置を開示している。この転倒警報装置では、重量物に傾斜センサを設けると共に、この重量物の傾斜角に応じて重量物が転倒する確率を示す転倒予測度データを予め用意しておき、重量物の傾斜角と転倒予測度データとを比較することによって重量物の転倒を予測することとしている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−56441号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ラックキャビネットにユニットが引き出し可能に搭載されたラック搭載型機器は、上記特許文献1に記載の受配電盤と異なり、設置後においても転倒する可能性がある。というのは、ラックキャビネットからユニットを引き出す際、ラック搭載型機器全体の重心位置が引き出し側に移行してしまうからである。
【0005】
そこで、一般に、ラックキャビネットには転倒防止措置としてスタビライザが用意されている。このスタビライザは、ラックキャビネットの下端に常設される場合と、必要に応じて適宜にラックキャビネットの下端に取り付けて使用する場合と、の二つの場合がある。何れの場合にせよ上記スタビライザはラック搭載型機器の転倒防止に一定の効果を奏していた。
【0006】
しかし、ラックキャビネット内でのユニットの配置態様の如何によってはそもそも上記のスタビライザが全く不要である場合がある。にも拘わらず、スタビライザがラックキャビネットの下端に常設されているとすると、スタビライザの設置スペースを単に浪費するばかりか、ハードウェア資源の全くの無駄をも招く結果となる。一方、スタビライザを随時、ラックキャビネットの下端に取り付けて使用するとなると、そもそもの前提としてスタビライザの要否を誤りなく見極める判断力が保守員に求められることになり、そこに不確実性が残る。
【0007】
このような種々の問題は、元を正せば、ラックキャビネットからユニットを引き出す際、ラック搭載型機器全体の重心位置がどのように変化するかを把握できていなかったからに他ならない。
【0008】
本願発明は、上記の事情に鑑みてなされたものであり、その主たる目的は、ラックキャビネットからユニットを引き出す際の、ラック搭載型機器全体の重心位置の変化を検出可能な、ラック搭載型機器の重心位置検出装置、重心位置検出方法、転倒予測装置を提供することにある。
【課題を解決するための手段】
【0009】
本願発明の第一の観点によれば、以下のように構成される、ラック搭載型機器の重心位置検出装置が提供される。即ち、ラック搭載型機器は、ラックキャビネットにユニットを引き出し可能に搭載したものである。ラック搭載型機器の重心位置検出装置は、前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出するユニット位置検出手段と、前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、を備えている。
【0010】
本願発明の第二の観点によれば、以下のように構成される、ラック搭載型機器の転倒予測装置が提供される。即ち、ラック搭載型機器は、ラックキャビネットにユニットを引き出し可能に搭載したものである。ラック搭載型機器の転倒予測装置は、前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出するユニット位置検出手段と、前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、前記ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測情報を記憶する転倒予測情報記憶手段と、前記ラック搭載型機器全体の重心位置と、前記転倒予測情報と、に基づいて前記ラック搭載型機器の転倒可能性を判定する転倒可能性判定手段と、を備えている。
【0011】
本願発明の第三の観点によれば、以下のように構成される、ラック搭載型機器の転倒予測装置が提供される。即ち、ラック搭載型機器は、ラックキャビネットにユニットを引き出し可能に搭載したものである。ラック搭載型機器の転倒予測装置は、前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、前記ラックキャビネットに対する、前記ラックキャビネットから最も引き出された状態の前記ユニットの、引出方向における相対的位置としての最大引出位置を記憶するユニット最大引出位置記憶手段と、前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの最大引出位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、前記ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測情報を記憶する転倒予測情報記憶手段と、前記ラック搭載型機器全体の重心位置と、前記転倒予測情報と、に基づいて前記ラック搭載型機器の転倒可能性を判定する転倒可能性判定手段と、を備えている。
【0012】
本願発明の第四の観点によれば、ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の重心位置は以下のような方法で検出される。即ち、第一のステップとして、前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出する。次に、第二のステップとして、前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する。
【発明の効果】
【0013】
本願発明によれば、前記ラックキャビネットから前記ユニットを引き出す際の、前記ラック搭載型機器全体の重心位置の変化を検出することができる。
【図面の簡単な説明】
【0014】
【図1】第一実施形態に係る重心位置検出装置の機能ブロック図
【図2】第二実施形態に係る転倒予測装置の機能ブロック図
【図3】第三実施形態に係る転倒予測装置の斜視図
【図4】上記転倒予測装置の機能ブロック図
【図5】ユニットメモリの具体的内容を示すブロック図
【図6】ラックキャビネットメモリの具体的内容を示すブロック図
【図7】転倒予測情報メモリの具体的内容を示すブロック図
【図8】第一転倒予測データのコンター図
【図9】第二転倒予測データのコンター図
【図10】上記転倒予測装置の制御フロー
【図11】ラック搭載型機器全体の重心位置(奥行方向)の算出方法の一例を示す図
【図12】ラック搭載型機器全体の重心位置(高さ方向)の算出方法の一例を示す図
【図13】ラック搭載型機器全体の重心位置(幅方向)の算出方法の一例を示す図
【図14】第一変形例に係る転倒予測装置の斜視図
【図15】第二変形例に係る転倒予測装置の斜視図
【図16】第四実施形態に係る転倒予測装置の機能ブロック図
【図17】上記転倒予測装置の制御フロー
【発明を実施するための形態】
【0015】
<第一実施形態>
以下、図1を参照しつつ、本願発明の第一実施形態を説明する。本実施形態に係る重心位置検出装置1は、ラック搭載型機器の重心位置を検出する装置である。ラック搭載型機器とは、ラックキャビネットにユニットを引き出し可能に搭載したものである。即ち、ラック搭載型機器とは、ラックキャビネットと、このラックキャビネットに引き出し自在に搭載された少なくとも1つ以上のユニットと、から構成されている。このラック搭載型機器としては、例えば、ラックキャビネットに中央処理装置や入出力装置などを搭載したサーバー機器や、ラックキャビネットに仮想テープ装置やディスクアレイ装置などを搭載したメインフレームなどといったラック搭載型情報処理機器が挙げられる。
【0016】
この重心位置検出装置1は、ラックキャビネットメモリ2(ラックキャビネット重心情報記憶手段)と、ユニットメモリ3(ユニット重心情報記憶手段)と、ユニット位置検出器4(ユニット位置検出手段)と、重心位置算出器5(重心位置算出手段)と、を備えて構成されている。
【0017】
ラックキャビネットメモリ2は、ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するものである。「ラックキャビネット自身の重心位置」とは、ラックキャビネットの基準点から見たときのラックキャビネットの重心位置を意味する。この「基準点」とは、本実施形態において、ラックキャビネットの前面と左側面と床面とが交差する地点を意味する。「床面」とは、ラック搭載型機器8が設置される土台を意味する。また、「ラックキャビネット自身の重量」とは、ユニットが搭載されていない状態におけるラックキャビネットの重量を意味する。上記のラックキャビネットメモリ2は、例えば、読み出し専用のROM(Read Only Memory)や読み書き自由のRAM(Random Access Memory)によって構成することができる。
【0018】
ユニットメモリ3は、ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するものである。「ユニット自身の重心位置」とは、ユニットの基準点から見たときのユニットの重心位置を意味する。この「基準点」とは、本実施形態において、ユニットの前面と左側面と底面とが交差する地点を意味する。「ユニットの搭載高さ位置」とは、上記の床面を基準としたユニットの底面の高さ位置を意味する。上記のユニットメモリ3は、例えば、読み出し専用のROMや読み書き自由のRAMによって構成することができる。
【0019】
ユニット位置検出器4は、ラックキャビネットに対するユニットの引出方向における相対的位置を検出するものである。即ち、ラックキャビネットからユニットを引き出し始めると、ラックキャビネットに対するユニットの引出方向における相対的位置は変化し始める。従って、上記のユニット位置検出器4は、ラックキャビネットに対するユニットの引出方向における相対的位置の変化を検出するものと換言することができる。「ラックキャビネットに対するユニットの引出方向における相対的位置」とは、ラックキャビネットの基準点から見たユニットの基準点の引出方向における相対的位置を意味する。
【0020】
上記のユニット位置検出器4は、公知のRFID(Radio Frequency IDentification)技術を応用することで実現することができる。即ち、一般的なRFID技術は、主であるトランスミッタ(別名:リーダ/ライタ、イニシエータ、質問器)と、従であるトランスポンダ(別名:RFIDタグ、非接触ICカード、ターゲット、応答器)と、から構成されている。そして、例えば、トランスミッタをラックキャビネットに、トランスポンダをユニットに取り付けるとする。この構成で、トランスミッタとトランスポンダとの間の距離を測定することにより、ラックキャビネットに対するユニットの引出方向における相対的位置を検出することができる。この「トランスミッタとトランスポンダとの間の距離(以下、単に距離とも称する。)」を測定する技術としては、3つの技術が知られている。第一の技術は、トランスミッタがトランスポンダから受信する信号の強さと、上記距離と、の間にある相関関係を利用して上記距離を推定する技術である。第二の技術は、トランスポンダ内に複雑な回路を用意することで実現される特殊な通信方式を利用する技術である。第三の技術は、上記の距離と遅延時間との比例関係を利用して上記距離を算出する技術である。ここで、「遅延時間」とは、電波がトランスミッタより発信されてからトランスポンダに到達し、反射波となってトランスミッタにまで戻るのに要する時間を意味する。上記のユニット位置検出器4は、上記の第一〜第三の何れの技術を採用しても実現することができるが、特に第三の技術を採用して実現することが好ましい。というのは、上記第三の技術は、トランスポンダの構成が簡素とできることに加え、トランスポンダが有する通信用コイルの軸線が何れの方向に傾いていたとしても、算出される上記の距離には殆ど悪影響を及ぼさないからである。
【0021】
重心位置算出器5は、ラックキャビネット重心情報と、ユニット重心情報と、ユニットの引出方向における相対的位置と、に基づいてラック搭載型機器全体の重心位置を算出するものである。従って、重心位置算出器5は、詳しく言えば、ラックキャビネット自身の重心位置と、ラックキャビネット自身の重量と、ユニット自身の重心位置と、ユニット自身の重量と、ラックキャビネットに対するユニットの引出方向における相対的位置と、に基づいてラック搭載型機器全体の重心位置を算出するものと言うことができる。なお、本明細書において、「ラック搭載型機器」と、「ラック搭載型機器全体」と、は実質的に同じ意味として用いるものとする。従って、「ラック搭載型機器」も「ラック搭載型機器全体」も、ラックキャビネットと、このラックキャビネットに引き出し自在に搭載された少なくとも1つ以上のユニットと、から構成されている点で同一構成である。上記の重心位置算出器5は、演算手段としてのCPU(Central Proccessing Unit)と、このCPUを重心位置算出器5として機能させるための制御プログラムと、によって実現することができる。
【0022】
(まとめ)
(1)以上説明したように、本実施形態においてラック搭載型機器の重心位置検出装置1は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット位置検出器4と、重心位置算出器5と、を備えている。以上の構成によれば、ラックキャビネットからユニットを引き出す際の、ラック搭載型機器全体の重心位置の変化を検出することができる。
【0023】
(12)なお、ラックキャビネットに搭載されるユニットの数は、1でも2以上であってもよい。
【0024】
<第二実施形態>
次に、図2を参照しつつ、本願発明の第二実施形態を説明する。本実施形態は、上記の第一実施形態に係る構成要素のすべてを取り入れている。上記第一実施形態の構成要素と対応する構成要素については原則として同一の符号を付すこととする。上記第一実施形態と相違する点を中心に説明し、重複する説明については適宜、割愛する。
【0025】
本実施形態に係る転倒予測装置100は、ラック搭載型機器の転倒を予測する装置である。
【0026】
この転倒予測装置100は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット位置検出器4と、重心位置算出器5と、転倒予測情報メモリ6(転倒予測情報記憶手段)と、転倒可能性判定器7(転倒可能性判定手段)と、を備えて構成されている。
【0027】
転倒予測情報メモリ6は、ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測データ(転倒予測情報)を記憶するものである。「転倒可能性」とは、ラック搭載型機器が転倒する可能性を意味し、例えば、10%や50%といった具体的なパーセンテイジを伴って表現されたり、Level1やLevel2といった予め区分けされた段階の何れかを特定するように表現されたりする。この転倒予測情報メモリ6は、例えば、読み出し専用のROMや読み書き自由のRAMによって構成することができる。
【0028】
転倒可能性判定器7は、ラック搭載型機器全体の重心位置と、転倒予測データと、に基づいてラック搭載型機器の転倒可能性を判定するものである。上記の転倒可能性判定器7は、演算手段としてのCPUと、このCPUを転倒可能性判定器7として機能させるための制御プログラムと、によって実現することができる。
【0029】
(まとめ)
(2)以上説明したように、本実施形態においてラック搭載型機器の転倒予測装置100は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット位置検出器4と、重心位置算出器5と、転倒予測情報メモリ6と、転倒可能性判定器7と、を備えている。以上の構成によれば、ラックキャビネットからユニットを引き出す際の、ラック搭載型機器の転倒可能性を予測することができる。
【0030】
<第三実施形態>
次に、図3〜13を参照しつつ、本願発明の第三実施形態を説明する。本実施形態は、上記の第二実施形態に係る構成要素のすべてを取り入れている。上記第二実施形態の構成要素と対応する構成要素については原則として同一の符号を付すこととする。上記第二実施形態と相違する点を中心に説明し、重複する説明については適宜、割愛する。
【0031】
図3に示すように、本実施形態に係るラック搭載型機器8は、ラックキャビネット9と、このラックキャビネット9に引き出し自在に搭載された2つのユニット10と、を備えて構成されている。
【0032】
ラックキャビネット9は、脚部11を四隅に備える底板12と、底板12上に立てられる4本の支柱13と、底板12と支柱13を挟んで反対側に設けられる天板14と、を備えて構成されている。
【0033】
各ユニット10は、ラックキャビネット9内の所望の搭載高さ位置で、スライドレール15を介して支柱13に支持されている。このスライドレール15は、支柱13に対して締結固定される固定レールと、この固定レールに対して引き出し可能に支持される中間レールと、この中間レールに対して引き出し可能に支持される移動レールと、から構成されている。この構成で、上記の移動レールはユニット10の側面に対して締結固定され、もって、ユニット10はラックキャビネット9に支持されるようになっている。なお、図3に示す2つのユニット10のうち上段のユニット10はラックキャビネット9内に収容された状態となっており、下段のユニット10はラックキャビネット9から最も引き出された状態となっている。
【0034】
ここで、ユニット10がラックキャビネット9から引き出される方向を「引出方向PU」と定義する。同様に、ユニット10をラックキャビネット9内へ収容する方向を「収容方向AC」と定義する。また、ユニット10はラックキャビネット9の前面から引き出すものである。
【0035】
さて、各ユニット10の上面10aには、トランスポンダ16が貼り付けられている。一方で、ラックキャビネット9の支柱13のうち背面側の支柱13には、本実施形態において1つのトランスミッタ17が取り付けられている。トランスポンダ16とトランスミッタ17は、公知のRFID技術を利用して双方向通信可能となっている。
【0036】
また、各ユニット10に設けられたスライドレール15には、ラックキャビネット9からのユニット10のそれ以上の引き出しを実質的に禁止することができるブレーキ機構18が設けられている。このブレーキ機構18は、ソレノイド26(図4を併せて参照)と、このソレノイドの通電によって直線的に往復可能な可動部としてのロッドと、から構成されている。そして、上記のロッドの先端には例えば天然ゴムや合成ゴムといった摩擦体が取り付けられている。この構成で、ブレーキ機構18のソレノイド26(図4を併せて参照)が通電されると、ロッドがスライドレール15に向かって進出し、摩擦体がスライドレール15の移動レールに突き当たる。これにより、ラックキャビネット9からのユニット10の引き出しに対して、この引き出しを実質的に禁止するような抵抗が付される。
【0037】
ラックキャビネット9の近くには、ノート型パーソナルコンピュータ19が設置されている。このノート型パーソナルコンピュータ19は、表示手段としての液晶表示ディスプレイ20と、音声発生手段としてのスピーカー21と、入力手段としてのキーボード22(取得手段)と、図4に示す制御部27と、を含んで構成されている。制御部27は、図4に示すように、ラックキャビネットメモリ2と、重心位置算出器5と、転倒予測情報メモリ6と、転倒可能性判定器7と、転倒警報信号出力器40と、引出禁止信号出力器41と、によって構成されている。この制御部は、ノート型パーソナルコンピュータ19が有する図示しないCPUやROM、RAMに加えて、補助記憶装置としてのHDD(Hard disk drive)によって実現されている。本実施形態において、転倒警報出力手段は、液晶表示ディスプレイ20と、スピーカー21と、転倒警報信号出力器40と、によって実現されている。また、引出禁止手段は、ブレーキ機構18と、引出禁止信号出力器41と、によって実現されている。
【0038】
転倒警報信号出力器40は、ラック搭載型機器8の転倒可能性に基づいて、液晶表示ディスプレイ20やスピーカー21に対して転倒警報信号を出力する。これにより、液晶表示ディスプレイ20に転倒警報を表示させたり、スピーカー21から転倒警報音を発生させたりすることができるようになっている。
【0039】
引出禁止信号出力器41は、ラック搭載型機器8の転倒可能性に基づいてブレーキ機構18に対して引出禁止信号を出力する。これにより、ブレーキ機構18に、ラックキャビネット9からのユニット10のそれ以上の引き出しを実質的に禁止させることができるようになっている。
【0040】
図4に示すように、トランスポンダ16は、ユニットメモリ3と、ユニット通信器23と、を含んで構成されている。ユニット通信器23は、トランスミッタ17が有するリーダ通信器24と双方向通信するためのものである。トランスミッタ17は、ユニット位置検出器4と、リーダ通信器24と、を含んで構成されている。そして、ユニット通信器23とリーダ通信器24との存在により、トランスポンダ16とトランスミッタ17とは双方向通信可能となっている。
【0041】
上記のトランスミッタ17やブレーキ機構18は、例えばシリアルケーブルなどの信号線25によってノート型パーソナルコンピュータ19に接続されている。
【0042】
図5に示すように、ユニットメモリ3には、ラック搭載型機器8の初期出荷時に、重心位置データ28と、重量データ29と、品名データ30と、ロケーションデータ31と、幅データ32と、高さデータ33と、奥行データ34と、が記憶される。「重心位置データ28」とは、ユニット10自身の重心位置に関するデータであって、前述した基準点からのX値と、Y値と、Z値と、から構成されている。X値は、ユニット10の前面から重心位置までの奥行方向における距離を意味する。同様に、Y値は、ユニット10の左側面から重心位置までの幅方向における距離を意味する。同様に、Z値は、ユニット10の底面から重心位置までの高さ方向における距離を意味する。「重量データ29」とは、ユニット10の重量に関するデータである。「品名データ30」とは、ラック搭載型機器8に複数のユニット10が搭載された際、特定のユニット10を識別するための情報である。「ロケーションデータ31」とは、ユニット10の搭載高さ位置に関するデータである。「幅データ32」とは、ユニット10の幅に関するデータである。「高さデータ33」とは、ユニット10の高さに関するデータである。「奥行データ34」とは、ユニット10の奥行に関するデータである。
【0043】
図6に示すように、ラックキャビネットメモリ2には、ラック搭載型機器8の初期出荷時に、重心位置データ35と、重量データ36と、が記憶される。「重心位置データ35」とは、ラックキャビネット9自身の重心位置に関するデータであって、前述した基準点からのX値と、Y値と、Z値と、から構成されている。X値は、ラックキャビネット9の前面から重心位置までの奥行方向における距離を意味する。同様に、Y値は、ラックキャビネット9の左側面から重心位置までの幅方向における距離を意味する。同様に、Z値は、床面Q(図3を併せて参照)から重心位置までの高さ方向における距離を意味する。「重量データ36」とは、ラックキャビネット9の重量に関するデータである。
【0044】
図7に示すように、転倒予測情報メモリ6には、ラック搭載型機器8の初期出荷時に、第1転倒予測データ37(転倒予測情報、第1転倒予測情報)と、第2転倒予測データ38(転倒予測情報、第2転倒予測情報)と、が記憶される。第1転倒予測データ37を図8に、第2転倒予測データ38を図9に、夫々示す。図8には転倒抑制対策が施されたラック搭載型機器8が側面視で示されており、図9には転倒抑制効果が施されていないラック搭載型機器8が同様に側面視で示されている。即ち、図8に示すラック搭載型機器8の前面には、ラック搭載型機器8の転倒を抑制するためのスタビライザ39がその転倒抑制効果が発揮されるように取り付けられている。換言すれば、図8に示すラック搭載型機器8の前面と、床面Qと、の間にはスタビライザ39が設けられており、もって、ラック搭載型機器8は床面Qに対して強力に固定されている。一方、図9に示すラック搭載型機器8にはスタビライザ39が取り付けられていない。図8及び図9において、Level0、Level1、Level2といったラベルは、ラック搭載型機器8の転倒可能性をラック搭載型機器8の重心位置に応じて3段階に分けて表現したものである。Level0はラック搭載型機器8の転倒可能性が10%以下であることを意味し、Level1はラック搭載型機器8の転倒可能性が10〜30%であることを意味し、Level2はラック搭載型機器8の転倒可能性が30%以上であることを意味している。図8と図9に示される各転倒予測データを比較すれば判る通り、図9の第2転倒予測データ38は、図8の第1転倒予測データ37と比較して転倒可能性が高められている。具体的に言えば、図9におけるLevel0の領域は図8におけるそれと比較して狭く、図9におけるLevel2の領域は図8におけるそれと比較して広い。図8及び図9において、X印はラック搭載型機器8の重心位置を例示している。図8及び図9を見比べることで、例えラック搭載型機器8の重心位置が同じであっても、転倒抑制効果の有無によってラック搭載型機器8の転倒可能性が異なることが判る。なお、保守員は、スタビライザ39が図8のようにラック搭載型機器8に取り付けられているか否か(換言すればラック搭載型機器8の転倒を抑制するためのスタビライザ39による転倒抑制効果の発揮の有無)をキーボード22(図3を併せて参照)を介してノート型パーソナルコンピュータ19の制御部27に入力できるようになっており、入力された情報はRAMに保存される。
【0045】
(作動)
次に、転倒予測装置100の作動を説明する。
【0046】
先ず、転倒予測装置100の電源を投入すると(S300)、制御部27は、転倒抑制効果の有無の入力を待つ(S310)。このとき、制御部27は、保守員に対し、転倒抑制効果の有無の入力を促す画像を液晶表示ディスプレイ20に表示させる。保守員がキーボード22を操作して転倒抑制効果の有無を制御部27に入力すると、その入力された情報は制御部27のRAMに保存される。
【0047】
次に、制御部27は、転倒抑制効果の有無に関する情報に基づいて転倒予測データを転倒予測情報メモリ6から読み込んで取得し(S320)、RAMに保存する。即ち、転倒抑制効果が有る場合は、制御部27は、転倒予測情報メモリ6から第1転倒予測データ37を読み込んで取得する。一方、転倒抑制効果が無い場合は、制御部27は、転倒予測情報メモリ6から第2転倒予測データ38を読み込んで取得する。
【0048】
次に、制御部27は、ラックキャビネットメモリ2からラックキャビネット重心情報を読み込んで取得し(S330)、RAMに保存する。
【0049】
次に、制御部27は、各ユニットメモリ3からユニット重心情報を読み込んで取得し(S340)、例えば下記表1のようにテーブル形式でRAMに保存する。
【0050】
【表1】
【0051】
次に、ユニット位置検出器4はラックキャビネット9に対する各ユニット10の引出方向における相対的位置を検出し(S350)、検出された各ユニット10の相対的位置に関する情報は制御部27に送信されて、制御部27のRAMに保存される。
【0052】
次に、重心位置算出器5は、ラックキャビネット9自身の重心位置と、ラックキャビネット9自身の重量と、ユニット10自身の重心位置と、ユニット10自身の重量と、ラックキャビネット9に対するユニット10の引出方向における相対的位置と、に基づいてラック搭載型機器8全体の重心位置を算出する(S360)。
【0053】
(奥行方向:図11参照)
即ち、重心位置算出器5は、制御部27のRAMに記憶されている各種データを下記式(1)に代入することで、ラック搭載型機器8全体の重心位置のうち奥行方向における重心位置を算出する。
【0054】
【0055】
上記式1における各変数は下記の通りである。
X:ラック搭載型機器8の基準点から見たときのラック搭載型機器8の重心Gの奥行方向における位置(ただし、ラック搭載型機器8の基準点とは、ラックキャビネット9の基準点と同じ地点を意味する。)
W0:ラックキャビネット9自身の重量
X0:ラックキャビネット9自身の奥行方向における重心位置
Wn:ユニット10自身の重量(ただし、nは1から始まる正の数であって、上記表1のIDNo.を示す。以下同様である。)
Xn:ユニット10自身の奥行方向における重心位置
An:ラックキャビネット9の基準点に対するユニット10の基準点の奥行方向における相対的位置(なお、ユニット位置検出器4による検出結果はこの変数Anに反映されることとなる。)
【0056】
(高さ方向:図12)
同様に、重心位置算出器5は、制御部27のRAMに記憶されている各種データを下記式(2)に代入することで、ラック搭載型機器8全体の重心位置のうち高さ方向における重心位置を算出する。
【0057】
【0058】
上記式2における各変数は下記の通りである。
Z:ラック搭載型機器8の基準点から見たときのラック搭載型機器8の重心Gの高さ方向における位置
W0:ラックキャビネット9自身の重量
Z0:ラックキャビネット9自身の高さ方向における重心位置
Wn:ユニット10自身の重量
Zn:ユニット10自身の高さ方向における重心位置
Cn:ラックキャビネット9の基準点に対するユニット10の基準点の高さ方向における相対的位置(なお、上述した表1のロケーションデータ31はこの変数Cnに反映されることとなる。)
【0059】
(幅方向:図13)
同様に、重心位置算出器5は、制御部27のRAMに記憶されている各種データを下記式(3)に代入することで、ラック搭載型機器8全体の重心位置のうち幅方向における重心位置を算出する。
【0060】
【0061】
上記式3における各変数は下記の通りである。
Y:ラック搭載型機器8の基準点から見たときのラック搭載型機器8の重心Gの幅方向における位置
W0:ラックキャビネット9自身の重量
Y0:ラックキャビネット9自身の幅方向における重心位置
Wn:ユニット10自身の重量
Yn:ユニット10自身の幅方向における重心位置
Bn:ラックキャビネット9の基準点に対するユニット10の基準点の幅方向における相対的位置
【0062】
次に、転倒可能性判定器7は、ラック搭載型機器8全体の重心位置と、転倒予測データと、に基づいてラック搭載型機器8の転倒可能性を判定する(S370)。ここで、仮に、上記転倒予測データとして図8に示す第1転倒予測データ37が制御部27のRAMに記憶されているものとする。この場合、転倒可能性判定器7は、重心位置算出器5が算出したラック搭載型機器8全体の重心位置が図8の第1転倒予測データ37でどの領域に属するかを判定し、その所属先の領域に割り当てられた転倒可能性を取得し、取得した転倒可能性をRAMに保存する。本実施形態では、転倒可能性がLevel0、Level1、Level2のように段階的に識別されるようになっているので、上記のRAMには何れかのラベルが保存されることになる。
【0063】
次に、制御部27は、上記のRAMに記憶されている転倒可能性がLevel0であるか否かを判定する(S380)。この転倒可能性がLevel0でなかった場合は(S380:NO)、転倒警報信号出力器40は、スピーカー21に転倒警報信号を出力する(S390)。同様に、転倒警報信号出力器40は、液晶表示ディスプレイ20に転倒警報信号を出力する(S390)。同様に、引出禁止信号出力器41は、ブレーキ機構18に対して引出禁止信号を出力する(S410)。これにより、保守員に対しては強力に注意を促すと共に、ラックキャビネット9からのユニット10のそれ以上の引き出しが実質的に禁止される。その後、処理はS420へと進む。一方、転倒可能性がLevel0であった場合は(S380:YES)、処理は同様にS420へと進む。
【0064】
そして、処理を終了するための入力が保守員によってなされるまで、S350〜S420の処理を例えばおおよそ20[sec]間隔で繰り返し(S420:NO)、上記入力が保守員によってなされたら(S420:YES)、制御部27は処理を終了する(S430)。上述した制御によれば、転倒可能性がLevel2となるのを確実に回避することができる。
【0065】
<まとめ>
(2)以上説明したように、本実施形態においてラック搭載型機器8の転倒予測装置100は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット位置検出器4と、重心位置算出器5と、転倒予測情報メモリ6と、転倒可能性判定器7と、を備えている。以上の構成によれば、ラックキャビネット9からユニット10を引き出す際の、ラック搭載型機器8の転倒可能性を予測することができる。勿論、ラックキャビネット9から複数のユニット10が同時に引き出されるような場合にも、ラック搭載型機器8の転倒可能性を予測することができる。
【0066】
(3)また、転倒予測データは、第1転倒予測データ37と、この第1転倒予測データ37と比較して転倒可能性が高められた第2転倒予測データ38と、を含んでいる。転倒予測装置100は、ラック搭載型機器8の転倒を抑制するためのスタビライザ39による転倒抑制効果の発揮の有無を取得するキーボード22を更に備える。転倒可能性判定器7は、スタビライザ39による転倒抑制効果が発揮されている場合は第1転倒予測データ37を転倒予測データとして使用し、スタビライザ39による転倒抑制効果が発揮されていない場合は第2転倒予測データ38を転倒予測データとして使用するようになっている。即ち、スタビライザ39による転倒抑制効果の発揮の有無によってラック搭載型機器8の転倒可能性には変化が生ずる。従って、以上の構成によれば、スタビライザ39による転倒抑制効果が発揮されているいないに拘わらず、ラック搭載型機器8の転倒可能性を高い精度で予測することが可能となる。
【0067】
(4)また、上記の転倒予測データ(第1転倒予測データ37又は第2転倒予測データ38)の上記転倒可能性は、図8や図9に示すように、ラック搭載型機器8全体の重心位置に応じて少なくとも3段階に区分けされている。以上の構成によれば、ラック搭載型機器8の転倒可能性をきめ細かく予測することができる。
【0068】
(5)また、転倒予測装置100は、ラック搭載型機器8の上記転倒可能性に基づいて転倒警報を出力する転倒警報出力手段を更に備えている。以上の構成によれば、保守員に対してラック搭載型機器8の転倒に対する注意を促すことができる。
【0069】
(6、7)また、転倒警報出力手段は、聴覚的な手段により転倒警報を出力可能に構成されていてもよいし、視覚的な手段により転倒警報を出力可能に構成されていてもよい。
【0070】
(8)また、転倒予測装置100は、ラック搭載型機器8の上記転倒可能性に基づいてユニット10のそれ以上の引き出しを実質的に禁止する引出禁止手段を更に備えている。以上の構成によれば、ラック搭載型機器8の転倒を防止することができる。
【0071】
(9)また、引出禁止手段は、ラックキャビネット9からのユニット10の引き出しに対して、この引き出しを実質的に禁止するような抵抗を付するように構成されている。以上の構成によれば、引出禁止手段をシンプルな原理で実現することができる。
【0072】
(13)また、ラックキャビネット9に搭載されるユニット10の数は、図3に示すように2つであることに代えて、1つでも3つ以上でもよい。
【0073】
また、重心位置算出器5によるラック搭載型機器8全体の重心位置の算出は、好ましくは、1[sec]に1回、行われることが好ましい。ラック搭載型機器8の転倒を確実に回避できるからである。
【0074】
<第一変形例>
次に、図14に基づいて、上記第三実施形態の第一変形例を説明する。即ち、上記第三実施形態では、引出禁止手段は、引出禁止信号出力器41と、ブレーキ機構18と、によって構成されるとした。しかし、これに代えて、本変形例では、引出禁止手段は、前述の引出禁止信号出力器41と、接続ロープ42(接続部材)と、ロック機構43と、を含んで構成される。上記の接続ロープ42は、ラックキャビネット9から引き出される各ユニット10と一緒に動くように一端が各ユニット10に接続されている。そして、接続ロープ42の他端は上記のロック機構43に挿入されている。ロック機構43は、挿入されている接続ロープ42の動きを許容し及び実質的に禁止することができるようになっている。即ち、ロック機構43は、引出禁止信号出力器41から引出禁止信号を受信すると、接続ロープ42の動きを実質的に禁止するように構成されている。
【0075】
(まとめ)
(10)以上説明したように、引出禁止手段は、ラックキャビネット9から引き出されるユニット10と一緒に動くようにユニット10に接続された接続ロープ42と、接続ロープ42の動きを許容し及び実質的に禁止することができるロック機構43と、を含んで構成されている。以上の構成によれば、引出禁止手段をシンプルな原理で実現することができる。
【0076】
<第二変形例>
次に、図15に基づいて、上記第三実施形態の第二変形例を説明する。即ち、上記第三実施形態では、図3に示すようにトランスミッタ17を1つ、設けることとした。しかし、これに代えて、本変形例では、図15に示すように、トランスミッタ17を複数で設けることとしている。図15の例では、トランスミッタ17は平面視で対角線上に配置される2本の支柱13の上下端に夫々、設けられている。このようにトランスミッタ17の設置数を増やすことで、ラックキャビネット9に対するユニット10の引出方向における相対的位置を精度よく把握することが可能となる。また、複数のトランスミッタ17の設置位置を図15に示すように、ラックキャビネット9に収容された状態のユニット10を取り囲むように配置することで、ラックキャビネット9に対するユニット10の引出方向における相対的位置を一層高い精度で把握することが可能となる。
【0077】
<第四実施形態>
次に、図16及び図17を参照しつつ、本願発明の第四実施形態を説明する。本実施形態は、上記の第二実施形態に係る構成要素のすべてを取り入れている。上記第三実施形態の構成要素と対応する構成要素については原則として同一の符号を付すこととする。上記第三実施形態と相違する点を中心に説明し、重複する説明については適宜、割愛する。
【0078】
上記第三実施形態では、ユニット位置検出器4を設け、重心位置算出器5は、このユニット位置検出器4によって検出されたユニット10の引出方向における相対的位置を用いてラック搭載型機器8全体の重心位置を算出することとした。しかし、これに代えて、本実施形態では、ユニット最大引出位置メモリ44(ユニット最大引出位置記憶手段)を設けている。このユニット最大引出位置メモリ44はノート型パーソナルコンピュータ19の制御部27に設けられており、RAMやROMによって実現されている。このユニット最大引出位置メモリ44には、ラックキャビネット9に対するユニット10の所定の相対的位置を記憶が記憶されている。詳しくは、ユニット最大引出位置メモリ44には、ラックキャビネット9に対する、ラックキャビネット9から最も引き出された状態のユニット10の、引出方向における相対的位置としての最大引出位置が記憶されている。そして、重心位置算出器5は、ユニット位置検出器4によって検出された相対的位置に代えて、ユニット最大引出位置メモリ44から読み込んで取得した最大引出位置を用いてラック搭載型機器8全体の重心位置を算出するようになっている。
【0079】
(作動)
次に、転倒予測装置100の作動を説明する。
【0080】
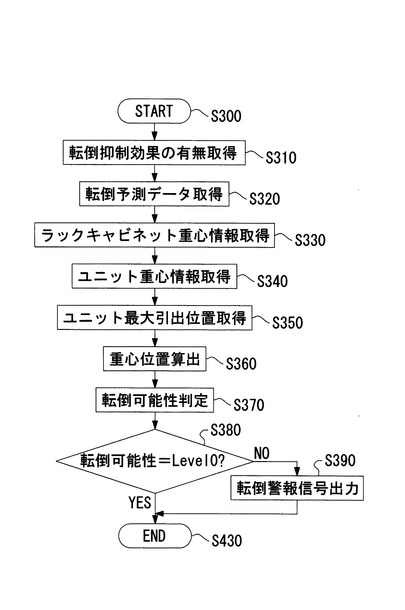
先ず、転倒予測装置100の電源を投入すると(S300)、制御部27は、転倒抑制効果の有無の入力を待つ(S310)。このとき、制御部27は、保守員に対し、転倒抑制効果の有無の入力を促す画像を液晶表示ディスプレイ20に表示させる。保守員がキーボード22を操作して転倒抑制効果の有無を制御部27に入力すると、その入力された情報は制御部27のRAMに保存される。
【0081】
次に、制御部27は、転倒抑制効果の有無に関する情報に基づいて転倒予測データを転倒予測情報メモリ6から読み込んで取得し(S320)、RAMに保存する。
【0082】
次に、制御部27は、ラックキャビネットメモリ2からラックキャビネット重心情報を読み込んで取得し(S330)、RAMに保存する。
【0083】
次に、制御部27は、各ユニットメモリ3からユニット重心情報を読み込んで取得し(S340)、例えば下記表1のようにテーブル形式でRAMに保存する。
【0084】
【表1】
【0085】
次に、制御部27は、ユニット最大引出位置メモリ44から最大引出位置に関する情報を読み込んで取得し(S350)、RAMに保存する。
【0086】
次に、重心位置算出器5は、ラックキャビネット9自身の重心位置と、ラックキャビネット9自身の重量と、ユニット10自身の重心位置と、ユニット10自身の重量と、最大引出位置と、に基づいてラック搭載型機器8全体の重心位置を算出する(S360)。
【0087】
次に、転倒可能性判定器7は、ラック搭載型機器8全体の重心位置と、転倒予測データと、に基づいてラック搭載型機器8の転倒可能性を判定する(S370)。
【0088】
次に、制御部27は、上記のRAMに記憶されている転倒可能性がLevel0であるか否かを判定する(S380)。転倒可能性がLevel0でなかった場合は(S380:NO)、転倒警報信号出力器40は、スピーカー21に転倒警報信号を出力する(S390)。同様に、転倒警報信号出力器40は、液晶表示ディスプレイ20に転倒警報信号を出力する(S390)。その後、制御部27は、処理を終了する(S430)。一方、転倒可能性がLevel0であった場合は(S380:YES)、制御部27は、ユニット10の引き出しも、ユニット10の新規搭載も問題ない旨を液晶表示ディスプレイ20に適宜表示後、処理を終了する(S430)。
【0089】
(まとめ)
(11)以上説明したように、本実施形態における転倒予測装置100は、ラックキャビネットメモリ2と、ユニットメモリ3と、ユニット最大引出位置メモリ44と、重心位置算出器5と、転倒予測情報メモリ6と、転倒可能性判定器7と、を備えている。以上の構成によれば、ラックキャビネット9からユニット10を実際に引き出す前に、引き出したときのラック搭載型機器8の転倒可能性を予測することができる。また、ラックキャビネット9にユニット10を搭載するときは、搭載直後、ユニット10はラックキャビネット9から最大限引き出された状態となっている。従って、以上の構成によれば、ラックキャビネット9にユニット10を実際に搭載する前に、搭載直後のラック搭載型機器8の転倒可能性を予測することができる。
【0090】
上記構成の付随的な効果としては、このようにラック搭載型機器8の転倒可能性を多面的にチェックできるので、ラック搭載型機器8の出荷前にスタビライザ39の要否を把握することができる。従って、スタビライザ39がなくてもラック搭載型機器8の転倒可能性が低いと確認できたときは、スタビライザ39を出荷対象から除外することが可能となり、もって、スタビライザ39の設置工数削減や設置スペース削減、ハードウェア資源の節約に大きく寄与することとなる。
【符号の説明】
【0091】
1 重心位置検出装置
2 ラックキャビネットメモリ(ラックキャビネット重心情報記憶手段)
3 ユニットメモリ(ユニット重心情報記憶手段)
4 ユニット位置検出器(ユニット位置検出手段)
5 重心位置算出器(重心位置算出手段)
100 転倒予測装置
【特許請求の範囲】
【請求項1】
ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の重心位置検出装置であって、
前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、
前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、
前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出するユニット位置検出手段と、
前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、
を備えた、ラック搭載型機器の重心位置検出装置。
【請求項2】
ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の転倒予測装置であって、
前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、
前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、
前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出するユニット位置検出手段と、
前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、
前記ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測情報を記憶する転倒予測情報記憶手段と、
前記ラック搭載型機器全体の重心位置と、前記転倒予測情報と、に基づいて前記ラック搭載型機器の転倒可能性を判定する転倒可能性判定手段と、
を備えた、ラック搭載型機器の転倒予測装置。
【請求項3】
請求項2に記載のラック搭載型機器の転倒予測装置であって、
前記転倒予測情報は、第1転倒予測情報と、この第1転倒予測情報と比較して転倒可能性が高められた第2転倒予測情報と、を含んでおり、
前記ラック搭載型機器の転倒を抑制するためのスタビライザによる転倒抑制効果の発揮の有無を取得する取得手段を更に備え、
前記転倒可能性判定手段は、前記スタビライザによる転倒抑制効果が発揮されている場合は前記第1転倒予測情報を前記転倒予測情報として使用し、前記スタビライザによる転倒抑制効果が発揮されていない場合は前記第2転倒予測情報を前記転倒予測情報として使用する、
ラック搭載型機器の転倒予測装置。
【請求項4】
請求項2又は3に記載のラック搭載型機器の転倒予測装置であって、
前記転倒予測情報の上記転倒可能性は、前記ラック搭載型機器全体の重心位置に応じて少なくとも3段階に区分けされている、
ラック搭載型機器の転倒予測装置。
【請求項5】
請求項2〜4の何れかに記載のラック搭載型機器の転倒予測装置であって、
前記ラック搭載型機器の上記転倒可能性に基づいて転倒警報を出力する転倒警報出力手段を更に備える、ラック搭載型機器の転倒予測装置。
【請求項6】
請求項5に記載のラック搭載型機器の転倒予測装置であって、
前記転倒警報出力手段は、聴覚的な手段により前記転倒警報を出力可能に構成されている、
ラック搭載型機器の転倒予測装置。
【請求項7】
請求項5又は6に記載のラック搭載型機器の転倒予測装置であって、
前記転倒警報出力手段は、視覚的な手段により前記転倒警報を出力可能に構成されている、
ラック搭載型機器の転倒予測装置。
【請求項8】
請求項2〜7の何れかに記載のラック搭載型機器の転倒予測装置であって、
前記ラック搭載型機器の上記転倒可能性に基づいて前記ユニットのそれ以上の引き出しを実質的に禁止する引出禁止手段を更に備えた、
ラック搭載型機器の転倒予測装置。
【請求項9】
請求項8に記載のラック搭載型機器の転倒予測装置であって、
前記引出禁止手段は、前記ラックキャビネットからの前記ユニットの引き出しに対して、この引き出しを実質的に禁止するような抵抗を付するように構成されている、
ラック搭載型機器の転倒予測装置。
【請求項10】
請求項8に記載のラック搭載型機器の転倒予測装置であって、
前記引出禁止手段は、
前記ラックキャビネットから引き出される前記ユニットと一緒に動くように前記ユニットに接続された接続部材と、
前記接続部材の動きを許容し及び実質的に禁止することができるロック機構と、
を含んで構成されている、
ラック搭載型機器の転倒予測装置。
【請求項11】
ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の重心位置検出装置であって、
前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、
前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、
前記ラックキャビネットに対する、前記ラックキャビネットから最も引き出された状態の前記ユニットの、引出方向における相対的位置としての最大引出位置を記憶するユニット最大引出位置記憶手段と、
前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの最大引出位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、
前記ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測情報を記憶する転倒予測情報記憶手段と、
前記ラック搭載型機器全体の重心位置と、前記転倒予測情報と、に基づいて前記ラック搭載型機器の転倒可能性を判定する転倒可能性判定手段と、
を備えた、ラック搭載型機器の転倒予測装置。
【請求項12】
前記ユニットは、前記ラックキャビネットに複数で搭載されている、
請求項1に記載のラック搭載型機器の重心位置検出装置。
【請求項13】
前記ユニットは、前記ラックキャビネットに複数で搭載されている、
請求項2〜11の何れかに記載のラック搭載型機器の転倒予測装置。
【請求項14】
ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の重心位置検出方法であって、
前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出する第一のステップと、
前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する第二のステップと、
を含む、ラック搭載型機器の重心位置検出方法。
【請求項1】
ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の重心位置検出装置であって、
前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、
前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、
前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出するユニット位置検出手段と、
前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、
を備えた、ラック搭載型機器の重心位置検出装置。
【請求項2】
ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の転倒予測装置であって、
前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、
前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、
前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出するユニット位置検出手段と、
前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、
前記ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測情報を記憶する転倒予測情報記憶手段と、
前記ラック搭載型機器全体の重心位置と、前記転倒予測情報と、に基づいて前記ラック搭載型機器の転倒可能性を判定する転倒可能性判定手段と、
を備えた、ラック搭載型機器の転倒予測装置。
【請求項3】
請求項2に記載のラック搭載型機器の転倒予測装置であって、
前記転倒予測情報は、第1転倒予測情報と、この第1転倒予測情報と比較して転倒可能性が高められた第2転倒予測情報と、を含んでおり、
前記ラック搭載型機器の転倒を抑制するためのスタビライザによる転倒抑制効果の発揮の有無を取得する取得手段を更に備え、
前記転倒可能性判定手段は、前記スタビライザによる転倒抑制効果が発揮されている場合は前記第1転倒予測情報を前記転倒予測情報として使用し、前記スタビライザによる転倒抑制効果が発揮されていない場合は前記第2転倒予測情報を前記転倒予測情報として使用する、
ラック搭載型機器の転倒予測装置。
【請求項4】
請求項2又は3に記載のラック搭載型機器の転倒予測装置であって、
前記転倒予測情報の上記転倒可能性は、前記ラック搭載型機器全体の重心位置に応じて少なくとも3段階に区分けされている、
ラック搭載型機器の転倒予測装置。
【請求項5】
請求項2〜4の何れかに記載のラック搭載型機器の転倒予測装置であって、
前記ラック搭載型機器の上記転倒可能性に基づいて転倒警報を出力する転倒警報出力手段を更に備える、ラック搭載型機器の転倒予測装置。
【請求項6】
請求項5に記載のラック搭載型機器の転倒予測装置であって、
前記転倒警報出力手段は、聴覚的な手段により前記転倒警報を出力可能に構成されている、
ラック搭載型機器の転倒予測装置。
【請求項7】
請求項5又は6に記載のラック搭載型機器の転倒予測装置であって、
前記転倒警報出力手段は、視覚的な手段により前記転倒警報を出力可能に構成されている、
ラック搭載型機器の転倒予測装置。
【請求項8】
請求項2〜7の何れかに記載のラック搭載型機器の転倒予測装置であって、
前記ラック搭載型機器の上記転倒可能性に基づいて前記ユニットのそれ以上の引き出しを実質的に禁止する引出禁止手段を更に備えた、
ラック搭載型機器の転倒予測装置。
【請求項9】
請求項8に記載のラック搭載型機器の転倒予測装置であって、
前記引出禁止手段は、前記ラックキャビネットからの前記ユニットの引き出しに対して、この引き出しを実質的に禁止するような抵抗を付するように構成されている、
ラック搭載型機器の転倒予測装置。
【請求項10】
請求項8に記載のラック搭載型機器の転倒予測装置であって、
前記引出禁止手段は、
前記ラックキャビネットから引き出される前記ユニットと一緒に動くように前記ユニットに接続された接続部材と、
前記接続部材の動きを許容し及び実質的に禁止することができるロック機構と、
を含んで構成されている、
ラック搭載型機器の転倒予測装置。
【請求項11】
ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の重心位置検出装置であって、
前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報を記憶するラックキャビネット重心情報記憶手段と、
前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報を記憶するユニット重心情報記憶手段と、
前記ラックキャビネットに対する、前記ラックキャビネットから最も引き出された状態の前記ユニットの、引出方向における相対的位置としての最大引出位置を記憶するユニット最大引出位置記憶手段と、
前記ラックキャビネット重心情報と、前記ユニット重心情報と、前記ユニットの最大引出位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する重心位置算出手段と、
前記ラック搭載型機器全体の重心位置と転倒可能性とを関連付けた転倒予測情報を記憶する転倒予測情報記憶手段と、
前記ラック搭載型機器全体の重心位置と、前記転倒予測情報と、に基づいて前記ラック搭載型機器の転倒可能性を判定する転倒可能性判定手段と、
を備えた、ラック搭載型機器の転倒予測装置。
【請求項12】
前記ユニットは、前記ラックキャビネットに複数で搭載されている、
請求項1に記載のラック搭載型機器の重心位置検出装置。
【請求項13】
前記ユニットは、前記ラックキャビネットに複数で搭載されている、
請求項2〜11の何れかに記載のラック搭載型機器の転倒予測装置。
【請求項14】
ラックキャビネットにユニットを引き出し可能に搭載したラック搭載型機器の重心位置検出方法であって、
前記ラックキャビネットに対する前記ユニットの引出方向における相対的位置を検出する第一のステップと、
前記ラックキャビネット自身の重心位置と重量に関するラックキャビネット重心情報と、前記ユニット自身の重心位置と重量と搭載高さ位置に関するユニット重心情報と、前記ユニットの引出方向における相対的位置と、に基づいて前記ラック搭載型機器全体の重心位置を算出する第二のステップと、
を含む、ラック搭載型機器の重心位置検出方法。
【図1】

【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−108798(P2011−108798A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−261604(P2009−261604)
【出願日】平成21年11月17日(2009.11.17)
【出願人】(000168285)エヌイーシーコンピュータテクノ株式会社 (572)
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月17日(2009.11.17)
【出願人】(000168285)エヌイーシーコンピュータテクノ株式会社 (572)
【Fターム(参考)】
[ Back to top ]