
ラムダ制御部を調整するための方法および装置
【課題】ラムダ制御の制御応答の改善とラムダ制御による排ガスセンサの診断方法を提供する。
【解決手段】ラムダ制御部14のラムダ制御器パラメータの段階的な調整を行い、測定された空燃比の値の最大傾斜と、モデルから予想される空燃比の値の最大傾斜の差から制御器内部のシステムモデルにおける時定数の適合を行う。このようにして排ガスセンサ15の時定数TSを計算する。この時定数TSに基づいて、ラムダ制御器パラメータの調整を行うとともに、この時定数TSを閾値と比較し、ラムダ制御部の診断を行う。
【解決手段】ラムダ制御部14のラムダ制御器パラメータの段階的な調整を行い、測定された空燃比の値の最大傾斜と、モデルから予想される空燃比の値の最大傾斜の差から制御器内部のシステムモデルにおける時定数の適合を行う。このようにして排ガスセンサ15の時定数TSを計算する。この時定数TSに基づいて、ラムダ制御器パラメータの調整を行うとともに、この時定数TSを閾値と比較し、ラムダ制御部の診断を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関の排ガス通路に排ガス監視システムの一部として配置された排ガスセンサを備える内燃機関のラムダ制御部を調整するための方法であって、内燃機関に供給された空気・燃料混合物の空燃比を所定のように変更した後にモデル化され、測定された信号の比較に基づいて調整が行われ、測定された信号は排ガスセンサの出力信号の実際値であり、モデル化された信号は、排ガスモデルを使用して内燃機関に供給された空気・燃料混合物から導かれたモデル値である方法に関する。
【0002】
本発明は、さらに方法を実施するための装置に関する。
【背景技術】
【0003】
ガソリンエンジンを備える乗用車における排出量を低減するために、通常は三元触媒が排ガス浄化装置として使用され、三元触媒は、空燃比λが高精度で制御された場合にのみ十分に排ガスを変換させる。このために、空燃比λは、排ガス浄化装置の前方に配置された排ガスセンサによって測定される。このような排ガス浄化装置の酸素吸蔵能力を利用して、リーンバーン段階では酸素が吸収され、リッチバーン段階では再び放出される。これにより、排ガスの酸化可能な有害ガス成分を変換することができる。排ガス浄化装置の後方に配置された排ガスセンサは、この場合、排ガス浄化装置の酸素吸蔵能力を監視する役割を果たす。酸素吸蔵能力は、排ガス浄化装置の変換能力のための基準となる車載診断装置の範囲で監視しなければならない。酸素吸蔵能力を決定するためには、排ガス浄化装置はまずリーンバーン段階で酸素を充填され、次いでリッチバーン段階で排ガス内の既知のラムダ値によって、通過した排ガス量を考慮して排出を行うか、またはまずリッチバーン段階で排ガス浄化装置から酸素が排出され、次いでリーンバーン段階で、排ガス中の既知のラムダ値によって、通過した排ガス量を考慮して充填を行う。排ガス浄化装置の後方に配置された排ガスセンサが、もはや排ガス浄化装置によって吸蔵することのできない酸素を検出した場合にリーンバーン段階は終了する。同様に、排ガスセンサが濃厚な排ガスの通過を検出した場合にリッチバーン段階は終了する。排ガス浄化装置の酸素吸蔵能力は、リッチバーン段階で排出のために供給された還元剤の量もしくはリーンバーン段階で充填のために供給された酸素量に対応する。正確な量は、前方に配置された排ガスセンサの信号および他のセンサ信号により検出された排ガス質量流量から計算される。
【0004】
例えば汚染または老朽化により、前方に配置された排ガスセンサの動特性が低下した場合、もはや必要な精度により空燃比を制御することができず、これにより、排ガス浄化装置の変換能力が低下する。さらに排ガス浄化装置の診断にずれが生じる場合があり、このようなずれは、それ自体正確に作動している排ガス浄化装置が誤って機能不全であると評価されることつながる場合がある。立法機関は、必要とされる空燃比をさらに十分に正確に調節することができ、排出量が許容される限界値を超過せず、排ガス浄化装置が正確に監視されることを確保するために運転中のセンサの診断を要求している。とりわけ、増大された時定数および/またはむだ時間によって知ることのできるセンサ動特性の劣悪化を把握する必要がある。
【0005】
ドイツ国特許出願公開第102008042549号明細書により、内燃機関の排ガス通路に配置された排ガスセンサの上昇率およびむだ時間を診断するための方法および装置が既知であり、この場合、診断は内燃機関に供給された空気・燃料混合物の空燃比の所定の変化後にモデル化され、測定された信号の比較に基づいて行われ、信号は、排ガスセンサの出力信号、または出力信号から導かれ、モデル化または測定された信号である。この場合、モデル化された信号の経過で第1極値が決定され、モデル化された信号が所定の値だけ第1極値からずれていた場合に第1時点および第1開始値が決定され、測定された信号の経過で第2極値が決定される。さらに、測定された信号が所定の値だけ第2極値からずれていた場合に第2時点および第2開始値が決定され、第1積分が、第1時点から始まって所定期間にわたって、第1開始値とモデル化された信号との差によって形成され、第2積分が第2時点から始まって所定期間にわたって、第2開始値とモデル化された信号との差によって形成され、第2期間が所定の期間に等しいか、または第2期間の終了が、空燃比の変化時点または第1時点に関して規定され、第1積分と第2積分との量的比較から量的な比較値が形成され、この比較値から、排ガスセンサの上昇率および/またはむだ時間が推論される。
【0006】
この方法は、排ガスセンサの動特性を評価する際に用いられる空燃比のステップ式の調節を利用し、この場合、リッチからリーンへ、またはリーンからリッチへの方向関係をさらに区別する。このために、ステップ後の所定期間にわたって排ガスセンサのラムダ信号下の面積が積分され、制御器でモデル化されたラムダ信号の面積が同様に計算され、比率が出される。計算された比率が適用可能な閾値よりも小さい場合には、排ガスセンサはもはや要求される動的挙動のためには不十分である。
【0007】
制御器で空燃比をモデル化するためには、時定数TおよびゲインK=1ならびにむだ時間Ttを有するむだ時間モデルを備える一次フィルタが用いられる。一次フィルタは、したがって、次のように記述することができる:
G(S)=Kexp(−Tts)/(Ts+1) (1)。
【0008】
しかしながら、この方法は、幾つかのエンジンでは部分的には十分に着実とはいえず、ばらついた診断結果がもたらされることが判明した。その理由は、特にラムダ-制御システムの実際のゲインが、制御器モデルで使用される理論的に予想された値K=1からずれていることが多いからである。このことは、面積比に著しい影響を及ぼし、したがって、実際にはシステムゲインのずれであるにもかかわらず、センサ動特性の変化として誤って解釈されてしまう。このような挙動は、多かれ少なかれ全てのエンジンについて知られており、ゲインは非体系的に作動点毎に変化し、それゆえ、容易に補正することはできない。
【0009】
ここでは傾斜決定方法と呼ぶ別の方法では同様に空燃比のステップ式の調節を用い、ステップ後の所定の期間内に、測定された空燃比の値の最大傾斜を決定する。評価にかかる期間は適用可能な行程から得られ、この行程については、測定された空燃比がステップ後に変化してもよい。この期間はむだ時間として解釈され、評価の終了時点と、評価の終了時に測定された空燃比の値によりあらかじめ決定された最大傾斜を有する直線が、評価時に測定された最小限/最大限の空燃比と交差する時点との間の差が補正される。時定数エラーは、値の最大傾斜が小さすぎることによって検出される。
【0010】
同じ計算を、同様に反転させたラムダ信号によっても行うことができる。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】ドイツ国特許出願公開第102008042549号明細書
【発明の概要】
【発明が解決しようとする課題】
【0012】
本発明の課題は、まずラムダ制御部を改善し、診断の改善に関して上記方法を最適化することである。
【0013】
さらに本発明の課題は、方法を実施するための適宜な装置を提供することである。
【課題を解決するための手段】
【0014】
方法に関する課題は、ラムダ制御部におけるラムダ制御器-パラメータの段階的な調整が行われ、この場合に、測定された空燃比(LKV)の値の最大傾斜と、モデルから予想された空燃比(LKV)の値の最大傾斜との差が品質基準として使用されることによって解決される。この方法によりラムダ制御部を改善することができる。この場合、空燃比の変動が取り除かれるまでの還元が有利である。これは、排出量および走行特性にポジティブに作用する。
【0015】
好ましい方法変化態様におけるように、差に基づいてラムダ制御器を調整することができ、この場合、段階的により大きいまたはより小さいシステム時定数の方向に適合され、制御器適合の変数はこの差に関係して選択することができる。したがって、例えば、排ガスセンサのための時定数TSが適用され、好ましくはLKVがステップ式に変化した場合にラムダ制御部を調整することができる。調整は、測定された空燃比LKVの最大傾斜とモデルにしたがって予想されたLKVとの比較に基づいており、予想されたLKVは時定数TSを有するフィルタによって計算される。傾斜が等しいか、またはわずかな差のみを有している場合には、時定数TSは変更されない。この場合、時定数TSが真のセンサ時定数に相当することを前提とする。測定された空燃比LKVの傾斜が予想された空燃比LKVの傾斜よりも小さい場合には、次の反復ステップのために時定数TSが増大される。これに対して測定された空燃比LKVの傾斜がより大きい場合には、時定数TSは次の反復ステップのために低減される。「段階的に」という表現は、時定数TSがそれぞれ比較的小さい値だけ変更されることを示す。この方法では、1つのステップで真のセンサ時定数を検出しようと試みるというよりは、むしろゆっくりとこれに近似させる。これは、例えば故障、不正確にモデル化された入力変数、例えば空気質量流量により、結果からセンサ時定数を正確に計算することが不可能である場合、または、閉ループ制御が比較的高い制御器動特性を有しており、開ループ制御の計算式を用いることができない場合には有利である。
【0016】
排ガスセンサの動特性診断の着実性を向上させるためには、適用可能な閾値よりも差が小さい場合には、段階的な調整が停止され、最終的に調節されたシステム時定数が、排ガスセンサの動特性診断のためにモデルとして検出された空燃比(LKV)の経過のために使用される。
【0017】
さらに、有利な方法変化態様では、制御器構成に応じて、変更されたシステム時定数に制御器パラメータを適合させるために制御器ゲインの増大または低減および/または制御器内部のシステムモデルにおける時定数の適合が行われるように構成してもよい。
【0018】
方法に関する課題は、測定された空燃比(LKV)の値の最大傾斜から排ガスセンサのための時定数TSが計算され、内燃機関に供給される空気・燃料混合物の空燃比が所定のように変化した後に測定された信号に基づいて調整が行われ、測定された信号が排ガスセンサの出力信号の実際値となる場合にも解決することができる。明確に計算された時定数の利点は、時定数が排ガスセンサの診断結果よりも良好であり、具体的に使用できるだけでなく、さらに制御器によっては、時定数などのシステムパラメータから直接に得られるラムダ制御器パラメータを調整するためにも直接に役立つことである。さらに、明確に計算された時定数は、触媒診断のような他の機能によって有利に使用することもできる。
【0019】
時定数TSの導出は、2つの時定数を有する二次のシステムモデルに基づいており、ステップ応答が開ループ制御で評価される場合には、制御器の調整を改善することができる。
【0020】
公称時定数および値の最大傾斜から第2時定数を測定することができるように、好ましい方法変化態様では、時定数TSの導出は、2つの時定数を有する二次フィルタのステップ応答の最大傾斜を記述する解析的方程式のオフライン評価によって行われ、この場合に逆数特性線の形式の関数が診断ユニットに格納され、時定数TSは特性線へのアクセスによって決定されるように構成されている。特性線へのアクセスは、この場合、例えば非線形の最適化により、診断ユニットでむしろ極めて大きい手間をかけてのみ解析的方程式の解を得ることができるので、特に有利である。
【0021】
改善されたラムダ制御に関して、ラムダ制御値パラ−メタの調整が、検出されたシステム時定数または検出された時定数TSに基づいて実施されるように構成してもよい。
【0022】
好ましい方法変化態様では、さらに検出されたシステム時定数または検出された時定数TSが適用可能な閾値と比較され、この閾値から、動特性診断の範囲で排ガスセンサのための動的挙動が導出される。この閾値を超過した場合には、例えば老朽化により、排ガスセンサは最適なラムダ制御に関してもはや適しておらず、動作が鈍くなっていると仮定することができる。適宜なエラー表示によってこのことを車両運転手に示し、および/または適宜なエラー記録を内燃機関のエンジン制御部に残すことができる。
【0023】
例えばゲインの減少によって生じ得るように診断中に制御器速度が低下した場合には、制御器の作用が減じられ、閉ループ制御の挙動が開ループ制御の挙動に近づけられ、これにより、時定数計算の精度を高めることができる。
【0024】
方法の上記方法変化態様は、好ましくは、広帯域ラムダセンサの診断または酸化窒素センサの診断のために使用することができる。広帯域ラムダセンサとして、または定常ラムダセンサとして構成された排ガスセンサのためには、上記方法変化態様に対応して、診断のためにラムダ実際値がモデル化されたラムダモデル値と比較される。酸化窒素センサでは、実際値として酸化窒素センサの出力信号が評価され、モデル値がモデル化されたNOx値から決定される。したがって、この診断は、排ガス浄化装置が触媒および/または酸化窒素還元のための装置を備えるガソリンエンジンまたはリーンバーンエンジンで特に有利に使用することができる。方法の上記変化態様の別の使用法を一般に少なくとも1つのセンサによるプロセスで用いてもよい。これらのプロセスでは、時定数ならびに場合によってむだ時間を有する一次フィルタによってプロセスを近似させることができ、遅れたセンサの挙動を付加的な一次フィルタによって記述することができる。基本的には、この場合に反応特性の判定に関して上記利点も生じる。さらに、このようなプロセスを制御特性に関して改善することもできる。
【0025】
装置に関する課題は、本発明による方法を実施するために、差分形成のための計算ユニットならびに特性線のための蓄積器ユニットおよび上記方法変化態様にしたがって調整を行うための比較器を備える診断ユニットが設けられており、排ガスセンサの動特性診断のために用いることのできる排ガスセンサのために少なくとも1つの時定数を導出可能であることにより解決される。診断ユニットの機能性は、この場合、少なくとも部分的にソフトウェアに基づいて構成されていてもよく、別個のユニットまたは上位のエンジン制御部の一部として設けられていてもよい。
【0026】
図面に示した実施例に基づいて本発明を以下に詳述する。
【図面の簡単な説明】
【0027】
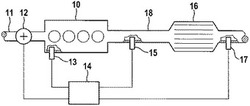
【図1】本発明による方法を使用することができる技術分野を示す概略図である。
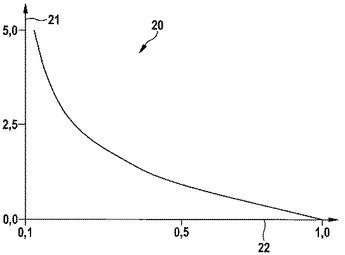
【図2】排ガスセンサによる診断のための時定数を計算するための特性線図である。
【発明を実施するための形態】
【0028】
図1は、本発明による排ガスセンサ15の診断方法を使用することができる技術分野におけるガソリンエンジンの実施例を概略的に示す。内燃機関10には気供給部11を介して空気が供給され、空気質量は空気質量測定器12により決定される。空気質量測定器12は、熱膜-空気質量測定器12として構成されていてもよい。内燃機関10の排ガスは排ガス通路18を介して排出され、排ガスの流れ方向に見て内燃機関10の後方には排ガス浄化装置16が設けられている。排ガス浄化装置16は一般に少なくとも1つの触媒を含む。
【0029】
内燃機関10を制御するためにはエンジン制御部14が設けられており、一方ではエンジン制御部14は燃料配量部13を介して内燃機関10に燃料を供給し、他方では、空気質量測定器12の信号がエンジン制御部14に供給され、排ガス通路18に配置された排ガスセンサ15および排ガス排出部18に配置された排ガスセンサ17に供給される。排ガスセンサ15は、図示の実施例では、内燃機関10に供給された燃料・空気混合物のラムダ実際値を測定する。排ガスセンサ15は、広帯域ラムダセンサまたは定常ラムダセンサとして構成されていてもよい。排ガスセンサ17は、排ガス浄化装置16を通過した後の排ガス組成を測定する。排ガスセンサ17は、ラムダ=1の時に電圧がジャンプするように変化する狭帯域センサ(Sprung sensor)またはバイナリセンサとして形成されていてもよい。
【0030】
内燃機関10のラムダ制御部の改善された調整に関して、好ましい方法変化態様によれば、調整は、内燃機関10に供給された空気・燃料混合物の空燃比LKVの所定の変化後にモデル化され、測定された信号の比較に基づいて行われ、この場合、測定された信号は、排ガスセンサ15の出力信号の実際値であり、モデル化された信号は、排ガスモデルを使用して内燃機関10に供給された空気・燃料混合物から導出されたモデル値である。この場合、本発明によれば、ラムダ制御パラメータの段階的な調整が行われ、測定された空燃比LKVの値の最大傾斜と、モデルにより予想される空燃比LKVの値の最大傾斜との間の差が品質基準として使用される。この差に基づいてラムダ制御器を調整することができ、ラムダ制御器は、例えば段階的により大きいまたはより小さいシステム時定数の方向に適合され、制御器適合の変数はこの差に基づいて選択される。
【0031】
排ガスセンサ15の動特性診断のためには、測定された空燃比の値の最大傾斜と、予想される値の最大傾斜とを比較することにより、ラムダ制御器パラメータの段階的な調整が行われる。
【0032】
さらに、測定された空燃比の値の最大傾斜から時定数が明確に計算されることにより傾斜決定方法が拡大され、これにより、診断および制御器調整が容易になる。
【0033】
噴射からセンサまでの空燃比をモデル化するために、エラー発生時には冒頭で方程式(1)により記述したように一次フィルタが使用される。しかしながら、エラー発生時には、付加的な一次フィルタのように動的に遅いセンサが作用し、これにより、むだ時間Ttおよびセンサのための2つの時定数TおよびTSを有する二次フィルタによってシステム全体をモデル化することができる:
G(S)=Kexp(-Tts)/((Ts+1)(Tss+1)) (2)。
【0034】
定常のラムダセンサとして構成された排ガスセンサ15の動特性診断のために、燃焼室内の空燃比がステップ式に調節され、ステップ後の所定の期間内に、測定された空燃比の値の最大傾斜が決定される。
【0035】
差分形成により、測定された空燃比の値の最大傾斜と予想された値の最大傾斜とを比較した場合、遅くなったセンサがどの程度まで制御器調節のために用いられた公称時定数とのずれをもたらすかについての基準を得る。この差分に基づいて、制御器は、より大きいまたはより小さいシステム時定数の方向に段階的に適合されることによって調整され、この場合、制御器適合の変数は差に関係して選択される。この場合、制御器の構造に応じて異なった手段をとるべきである。これらの手段は、例えば、制御器ゲインの増大もしくは低減、または制御器内部システムモデルにおける時定数の適合であってもよい。予想される値の最大傾斜は、公称時定数Tから計算するか、またはエラーのないシステムにおける測定によって決定することができる。
【0036】
システムパラメータから制御器パラメータを計算できる場合には制御器の調整を改善することができる。すなわち、調整はより迅速で、正確になる。このために、開ループ制御におけるステップ応答、および二次のシステムモデルを仮定して、公称時定数Tおよび測定された空燃比の値の最大傾斜を認識した上でセンサの付加的な時定数Tsを計算することができる。
【0037】
計算の基礎は、2つの時定数を有する二次フィルタのステップ応答の最大傾斜(dx/dt)maxを記述する解析的方程式であり、X0はステップ高さである:
(dx/dt)max=((KX0)/T1)(Ts/T1)^(TS/(T1−Ts)) (3)。
【0038】
既知の公称時定数および値の最大傾斜から第2時定数を決定するためには、Tsによる解析的方程式を解く(反転させる)必要があり、このことは、とりわけ非線形最適化によって行うことができる。しかしながら、このような最適化は制御器では手間がかかるので、逆関数がオフラインで計算され、逆数特性線の形態で制御器の格納されており、これにより、実質的に特性線にアクセスすることによって時定数を決定することができる。
【0039】
図2には、例示的にこのような特性線図20が示されており、y軸としてTs/Tのための時定数比21が記入されており、x軸として、(dλ/dt)max/Tin[λ/s2]のための最大ラムダ傾斜/時定数22の比率が記入されている。特性線図20は、ステップ高さ=1のために標準化されており、ゲイン=1で示されている。
【0040】
空燃比の調節およびこれに基づいた排ガスセンサ15の診断は閉ループ制御で行われるが、付加的な時定数における値の最大傾斜の変換導出は開ループ制御に基づいているので、さらに制御器の迅速性が低下する場合があり、これは制御器の構造に応じて異なる形式で起こる。これにより、時定数計算精度が高められる。なぜなら、閉ループ制御におけるステップ応答は開ループ制御におけるステップ応答に近づき、導出の際には考慮されない制御器の影響が減じられるからである。
【0041】
本発明による装置では、あらかじめ記述された診断関数をソフトウェアとしてエンジン制御部14に格納しておいてもよく、この場合、エンジン制御部14は、少なくとも1つの特性線ユニットを備え、この特性線に基づいて時定数TSを計算する。
【0042】
提案された上記方法およびその変化態様は、ここに紹介したラムダ制御およびラムダセンサ動特性診断以外のプロセスおよびセンサのためにも、このプロセスが時定数および場合によってはむだ時間を有する一次フィルタによって近似され、遅いセンサが付加的な一次フィルタによってモデル化され得る場合には、用いることができる。
【符号の説明】
【0043】
10 内燃機関
11 空気供給部
12 空気質量測定器
14 エンジン制御部
15 排ガスセンサ
16 排ガス浄化装置
17 排ガスセンサ
18 排ガス通路
20 特性線図
21 時定数比
【技術分野】
【0001】
本発明は、内燃機関の排ガス通路に排ガス監視システムの一部として配置された排ガスセンサを備える内燃機関のラムダ制御部を調整するための方法であって、内燃機関に供給された空気・燃料混合物の空燃比を所定のように変更した後にモデル化され、測定された信号の比較に基づいて調整が行われ、測定された信号は排ガスセンサの出力信号の実際値であり、モデル化された信号は、排ガスモデルを使用して内燃機関に供給された空気・燃料混合物から導かれたモデル値である方法に関する。
【0002】
本発明は、さらに方法を実施するための装置に関する。
【背景技術】
【0003】
ガソリンエンジンを備える乗用車における排出量を低減するために、通常は三元触媒が排ガス浄化装置として使用され、三元触媒は、空燃比λが高精度で制御された場合にのみ十分に排ガスを変換させる。このために、空燃比λは、排ガス浄化装置の前方に配置された排ガスセンサによって測定される。このような排ガス浄化装置の酸素吸蔵能力を利用して、リーンバーン段階では酸素が吸収され、リッチバーン段階では再び放出される。これにより、排ガスの酸化可能な有害ガス成分を変換することができる。排ガス浄化装置の後方に配置された排ガスセンサは、この場合、排ガス浄化装置の酸素吸蔵能力を監視する役割を果たす。酸素吸蔵能力は、排ガス浄化装置の変換能力のための基準となる車載診断装置の範囲で監視しなければならない。酸素吸蔵能力を決定するためには、排ガス浄化装置はまずリーンバーン段階で酸素を充填され、次いでリッチバーン段階で排ガス内の既知のラムダ値によって、通過した排ガス量を考慮して排出を行うか、またはまずリッチバーン段階で排ガス浄化装置から酸素が排出され、次いでリーンバーン段階で、排ガス中の既知のラムダ値によって、通過した排ガス量を考慮して充填を行う。排ガス浄化装置の後方に配置された排ガスセンサが、もはや排ガス浄化装置によって吸蔵することのできない酸素を検出した場合にリーンバーン段階は終了する。同様に、排ガスセンサが濃厚な排ガスの通過を検出した場合にリッチバーン段階は終了する。排ガス浄化装置の酸素吸蔵能力は、リッチバーン段階で排出のために供給された還元剤の量もしくはリーンバーン段階で充填のために供給された酸素量に対応する。正確な量は、前方に配置された排ガスセンサの信号および他のセンサ信号により検出された排ガス質量流量から計算される。
【0004】
例えば汚染または老朽化により、前方に配置された排ガスセンサの動特性が低下した場合、もはや必要な精度により空燃比を制御することができず、これにより、排ガス浄化装置の変換能力が低下する。さらに排ガス浄化装置の診断にずれが生じる場合があり、このようなずれは、それ自体正確に作動している排ガス浄化装置が誤って機能不全であると評価されることつながる場合がある。立法機関は、必要とされる空燃比をさらに十分に正確に調節することができ、排出量が許容される限界値を超過せず、排ガス浄化装置が正確に監視されることを確保するために運転中のセンサの診断を要求している。とりわけ、増大された時定数および/またはむだ時間によって知ることのできるセンサ動特性の劣悪化を把握する必要がある。
【0005】
ドイツ国特許出願公開第102008042549号明細書により、内燃機関の排ガス通路に配置された排ガスセンサの上昇率およびむだ時間を診断するための方法および装置が既知であり、この場合、診断は内燃機関に供給された空気・燃料混合物の空燃比の所定の変化後にモデル化され、測定された信号の比較に基づいて行われ、信号は、排ガスセンサの出力信号、または出力信号から導かれ、モデル化または測定された信号である。この場合、モデル化された信号の経過で第1極値が決定され、モデル化された信号が所定の値だけ第1極値からずれていた場合に第1時点および第1開始値が決定され、測定された信号の経過で第2極値が決定される。さらに、測定された信号が所定の値だけ第2極値からずれていた場合に第2時点および第2開始値が決定され、第1積分が、第1時点から始まって所定期間にわたって、第1開始値とモデル化された信号との差によって形成され、第2積分が第2時点から始まって所定期間にわたって、第2開始値とモデル化された信号との差によって形成され、第2期間が所定の期間に等しいか、または第2期間の終了が、空燃比の変化時点または第1時点に関して規定され、第1積分と第2積分との量的比較から量的な比較値が形成され、この比較値から、排ガスセンサの上昇率および/またはむだ時間が推論される。
【0006】
この方法は、排ガスセンサの動特性を評価する際に用いられる空燃比のステップ式の調節を利用し、この場合、リッチからリーンへ、またはリーンからリッチへの方向関係をさらに区別する。このために、ステップ後の所定期間にわたって排ガスセンサのラムダ信号下の面積が積分され、制御器でモデル化されたラムダ信号の面積が同様に計算され、比率が出される。計算された比率が適用可能な閾値よりも小さい場合には、排ガスセンサはもはや要求される動的挙動のためには不十分である。
【0007】
制御器で空燃比をモデル化するためには、時定数TおよびゲインK=1ならびにむだ時間Ttを有するむだ時間モデルを備える一次フィルタが用いられる。一次フィルタは、したがって、次のように記述することができる:
G(S)=Kexp(−Tts)/(Ts+1) (1)。
【0008】
しかしながら、この方法は、幾つかのエンジンでは部分的には十分に着実とはいえず、ばらついた診断結果がもたらされることが判明した。その理由は、特にラムダ-制御システムの実際のゲインが、制御器モデルで使用される理論的に予想された値K=1からずれていることが多いからである。このことは、面積比に著しい影響を及ぼし、したがって、実際にはシステムゲインのずれであるにもかかわらず、センサ動特性の変化として誤って解釈されてしまう。このような挙動は、多かれ少なかれ全てのエンジンについて知られており、ゲインは非体系的に作動点毎に変化し、それゆえ、容易に補正することはできない。
【0009】
ここでは傾斜決定方法と呼ぶ別の方法では同様に空燃比のステップ式の調節を用い、ステップ後の所定の期間内に、測定された空燃比の値の最大傾斜を決定する。評価にかかる期間は適用可能な行程から得られ、この行程については、測定された空燃比がステップ後に変化してもよい。この期間はむだ時間として解釈され、評価の終了時点と、評価の終了時に測定された空燃比の値によりあらかじめ決定された最大傾斜を有する直線が、評価時に測定された最小限/最大限の空燃比と交差する時点との間の差が補正される。時定数エラーは、値の最大傾斜が小さすぎることによって検出される。
【0010】
同じ計算を、同様に反転させたラムダ信号によっても行うことができる。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】ドイツ国特許出願公開第102008042549号明細書
【発明の概要】
【発明が解決しようとする課題】
【0012】
本発明の課題は、まずラムダ制御部を改善し、診断の改善に関して上記方法を最適化することである。
【0013】
さらに本発明の課題は、方法を実施するための適宜な装置を提供することである。
【課題を解決するための手段】
【0014】
方法に関する課題は、ラムダ制御部におけるラムダ制御器-パラメータの段階的な調整が行われ、この場合に、測定された空燃比(LKV)の値の最大傾斜と、モデルから予想された空燃比(LKV)の値の最大傾斜との差が品質基準として使用されることによって解決される。この方法によりラムダ制御部を改善することができる。この場合、空燃比の変動が取り除かれるまでの還元が有利である。これは、排出量および走行特性にポジティブに作用する。
【0015】
好ましい方法変化態様におけるように、差に基づいてラムダ制御器を調整することができ、この場合、段階的により大きいまたはより小さいシステム時定数の方向に適合され、制御器適合の変数はこの差に関係して選択することができる。したがって、例えば、排ガスセンサのための時定数TSが適用され、好ましくはLKVがステップ式に変化した場合にラムダ制御部を調整することができる。調整は、測定された空燃比LKVの最大傾斜とモデルにしたがって予想されたLKVとの比較に基づいており、予想されたLKVは時定数TSを有するフィルタによって計算される。傾斜が等しいか、またはわずかな差のみを有している場合には、時定数TSは変更されない。この場合、時定数TSが真のセンサ時定数に相当することを前提とする。測定された空燃比LKVの傾斜が予想された空燃比LKVの傾斜よりも小さい場合には、次の反復ステップのために時定数TSが増大される。これに対して測定された空燃比LKVの傾斜がより大きい場合には、時定数TSは次の反復ステップのために低減される。「段階的に」という表現は、時定数TSがそれぞれ比較的小さい値だけ変更されることを示す。この方法では、1つのステップで真のセンサ時定数を検出しようと試みるというよりは、むしろゆっくりとこれに近似させる。これは、例えば故障、不正確にモデル化された入力変数、例えば空気質量流量により、結果からセンサ時定数を正確に計算することが不可能である場合、または、閉ループ制御が比較的高い制御器動特性を有しており、開ループ制御の計算式を用いることができない場合には有利である。
【0016】
排ガスセンサの動特性診断の着実性を向上させるためには、適用可能な閾値よりも差が小さい場合には、段階的な調整が停止され、最終的に調節されたシステム時定数が、排ガスセンサの動特性診断のためにモデルとして検出された空燃比(LKV)の経過のために使用される。
【0017】
さらに、有利な方法変化態様では、制御器構成に応じて、変更されたシステム時定数に制御器パラメータを適合させるために制御器ゲインの増大または低減および/または制御器内部のシステムモデルにおける時定数の適合が行われるように構成してもよい。
【0018】
方法に関する課題は、測定された空燃比(LKV)の値の最大傾斜から排ガスセンサのための時定数TSが計算され、内燃機関に供給される空気・燃料混合物の空燃比が所定のように変化した後に測定された信号に基づいて調整が行われ、測定された信号が排ガスセンサの出力信号の実際値となる場合にも解決することができる。明確に計算された時定数の利点は、時定数が排ガスセンサの診断結果よりも良好であり、具体的に使用できるだけでなく、さらに制御器によっては、時定数などのシステムパラメータから直接に得られるラムダ制御器パラメータを調整するためにも直接に役立つことである。さらに、明確に計算された時定数は、触媒診断のような他の機能によって有利に使用することもできる。
【0019】
時定数TSの導出は、2つの時定数を有する二次のシステムモデルに基づいており、ステップ応答が開ループ制御で評価される場合には、制御器の調整を改善することができる。
【0020】
公称時定数および値の最大傾斜から第2時定数を測定することができるように、好ましい方法変化態様では、時定数TSの導出は、2つの時定数を有する二次フィルタのステップ応答の最大傾斜を記述する解析的方程式のオフライン評価によって行われ、この場合に逆数特性線の形式の関数が診断ユニットに格納され、時定数TSは特性線へのアクセスによって決定されるように構成されている。特性線へのアクセスは、この場合、例えば非線形の最適化により、診断ユニットでむしろ極めて大きい手間をかけてのみ解析的方程式の解を得ることができるので、特に有利である。
【0021】
改善されたラムダ制御に関して、ラムダ制御値パラ−メタの調整が、検出されたシステム時定数または検出された時定数TSに基づいて実施されるように構成してもよい。
【0022】
好ましい方法変化態様では、さらに検出されたシステム時定数または検出された時定数TSが適用可能な閾値と比較され、この閾値から、動特性診断の範囲で排ガスセンサのための動的挙動が導出される。この閾値を超過した場合には、例えば老朽化により、排ガスセンサは最適なラムダ制御に関してもはや適しておらず、動作が鈍くなっていると仮定することができる。適宜なエラー表示によってこのことを車両運転手に示し、および/または適宜なエラー記録を内燃機関のエンジン制御部に残すことができる。
【0023】
例えばゲインの減少によって生じ得るように診断中に制御器速度が低下した場合には、制御器の作用が減じられ、閉ループ制御の挙動が開ループ制御の挙動に近づけられ、これにより、時定数計算の精度を高めることができる。
【0024】
方法の上記方法変化態様は、好ましくは、広帯域ラムダセンサの診断または酸化窒素センサの診断のために使用することができる。広帯域ラムダセンサとして、または定常ラムダセンサとして構成された排ガスセンサのためには、上記方法変化態様に対応して、診断のためにラムダ実際値がモデル化されたラムダモデル値と比較される。酸化窒素センサでは、実際値として酸化窒素センサの出力信号が評価され、モデル値がモデル化されたNOx値から決定される。したがって、この診断は、排ガス浄化装置が触媒および/または酸化窒素還元のための装置を備えるガソリンエンジンまたはリーンバーンエンジンで特に有利に使用することができる。方法の上記変化態様の別の使用法を一般に少なくとも1つのセンサによるプロセスで用いてもよい。これらのプロセスでは、時定数ならびに場合によってむだ時間を有する一次フィルタによってプロセスを近似させることができ、遅れたセンサの挙動を付加的な一次フィルタによって記述することができる。基本的には、この場合に反応特性の判定に関して上記利点も生じる。さらに、このようなプロセスを制御特性に関して改善することもできる。
【0025】
装置に関する課題は、本発明による方法を実施するために、差分形成のための計算ユニットならびに特性線のための蓄積器ユニットおよび上記方法変化態様にしたがって調整を行うための比較器を備える診断ユニットが設けられており、排ガスセンサの動特性診断のために用いることのできる排ガスセンサのために少なくとも1つの時定数を導出可能であることにより解決される。診断ユニットの機能性は、この場合、少なくとも部分的にソフトウェアに基づいて構成されていてもよく、別個のユニットまたは上位のエンジン制御部の一部として設けられていてもよい。
【0026】
図面に示した実施例に基づいて本発明を以下に詳述する。
【図面の簡単な説明】
【0027】
【図1】本発明による方法を使用することができる技術分野を示す概略図である。
【図2】排ガスセンサによる診断のための時定数を計算するための特性線図である。
【発明を実施するための形態】
【0028】
図1は、本発明による排ガスセンサ15の診断方法を使用することができる技術分野におけるガソリンエンジンの実施例を概略的に示す。内燃機関10には気供給部11を介して空気が供給され、空気質量は空気質量測定器12により決定される。空気質量測定器12は、熱膜-空気質量測定器12として構成されていてもよい。内燃機関10の排ガスは排ガス通路18を介して排出され、排ガスの流れ方向に見て内燃機関10の後方には排ガス浄化装置16が設けられている。排ガス浄化装置16は一般に少なくとも1つの触媒を含む。
【0029】
内燃機関10を制御するためにはエンジン制御部14が設けられており、一方ではエンジン制御部14は燃料配量部13を介して内燃機関10に燃料を供給し、他方では、空気質量測定器12の信号がエンジン制御部14に供給され、排ガス通路18に配置された排ガスセンサ15および排ガス排出部18に配置された排ガスセンサ17に供給される。排ガスセンサ15は、図示の実施例では、内燃機関10に供給された燃料・空気混合物のラムダ実際値を測定する。排ガスセンサ15は、広帯域ラムダセンサまたは定常ラムダセンサとして構成されていてもよい。排ガスセンサ17は、排ガス浄化装置16を通過した後の排ガス組成を測定する。排ガスセンサ17は、ラムダ=1の時に電圧がジャンプするように変化する狭帯域センサ(Sprung sensor)またはバイナリセンサとして形成されていてもよい。
【0030】
内燃機関10のラムダ制御部の改善された調整に関して、好ましい方法変化態様によれば、調整は、内燃機関10に供給された空気・燃料混合物の空燃比LKVの所定の変化後にモデル化され、測定された信号の比較に基づいて行われ、この場合、測定された信号は、排ガスセンサ15の出力信号の実際値であり、モデル化された信号は、排ガスモデルを使用して内燃機関10に供給された空気・燃料混合物から導出されたモデル値である。この場合、本発明によれば、ラムダ制御パラメータの段階的な調整が行われ、測定された空燃比LKVの値の最大傾斜と、モデルにより予想される空燃比LKVの値の最大傾斜との間の差が品質基準として使用される。この差に基づいてラムダ制御器を調整することができ、ラムダ制御器は、例えば段階的により大きいまたはより小さいシステム時定数の方向に適合され、制御器適合の変数はこの差に基づいて選択される。
【0031】
排ガスセンサ15の動特性診断のためには、測定された空燃比の値の最大傾斜と、予想される値の最大傾斜とを比較することにより、ラムダ制御器パラメータの段階的な調整が行われる。
【0032】
さらに、測定された空燃比の値の最大傾斜から時定数が明確に計算されることにより傾斜決定方法が拡大され、これにより、診断および制御器調整が容易になる。
【0033】
噴射からセンサまでの空燃比をモデル化するために、エラー発生時には冒頭で方程式(1)により記述したように一次フィルタが使用される。しかしながら、エラー発生時には、付加的な一次フィルタのように動的に遅いセンサが作用し、これにより、むだ時間Ttおよびセンサのための2つの時定数TおよびTSを有する二次フィルタによってシステム全体をモデル化することができる:
G(S)=Kexp(-Tts)/((Ts+1)(Tss+1)) (2)。
【0034】
定常のラムダセンサとして構成された排ガスセンサ15の動特性診断のために、燃焼室内の空燃比がステップ式に調節され、ステップ後の所定の期間内に、測定された空燃比の値の最大傾斜が決定される。
【0035】
差分形成により、測定された空燃比の値の最大傾斜と予想された値の最大傾斜とを比較した場合、遅くなったセンサがどの程度まで制御器調節のために用いられた公称時定数とのずれをもたらすかについての基準を得る。この差分に基づいて、制御器は、より大きいまたはより小さいシステム時定数の方向に段階的に適合されることによって調整され、この場合、制御器適合の変数は差に関係して選択される。この場合、制御器の構造に応じて異なった手段をとるべきである。これらの手段は、例えば、制御器ゲインの増大もしくは低減、または制御器内部システムモデルにおける時定数の適合であってもよい。予想される値の最大傾斜は、公称時定数Tから計算するか、またはエラーのないシステムにおける測定によって決定することができる。
【0036】
システムパラメータから制御器パラメータを計算できる場合には制御器の調整を改善することができる。すなわち、調整はより迅速で、正確になる。このために、開ループ制御におけるステップ応答、および二次のシステムモデルを仮定して、公称時定数Tおよび測定された空燃比の値の最大傾斜を認識した上でセンサの付加的な時定数Tsを計算することができる。
【0037】
計算の基礎は、2つの時定数を有する二次フィルタのステップ応答の最大傾斜(dx/dt)maxを記述する解析的方程式であり、X0はステップ高さである:
(dx/dt)max=((KX0)/T1)(Ts/T1)^(TS/(T1−Ts)) (3)。
【0038】
既知の公称時定数および値の最大傾斜から第2時定数を決定するためには、Tsによる解析的方程式を解く(反転させる)必要があり、このことは、とりわけ非線形最適化によって行うことができる。しかしながら、このような最適化は制御器では手間がかかるので、逆関数がオフラインで計算され、逆数特性線の形態で制御器の格納されており、これにより、実質的に特性線にアクセスすることによって時定数を決定することができる。
【0039】
図2には、例示的にこのような特性線図20が示されており、y軸としてTs/Tのための時定数比21が記入されており、x軸として、(dλ/dt)max/Tin[λ/s2]のための最大ラムダ傾斜/時定数22の比率が記入されている。特性線図20は、ステップ高さ=1のために標準化されており、ゲイン=1で示されている。
【0040】
空燃比の調節およびこれに基づいた排ガスセンサ15の診断は閉ループ制御で行われるが、付加的な時定数における値の最大傾斜の変換導出は開ループ制御に基づいているので、さらに制御器の迅速性が低下する場合があり、これは制御器の構造に応じて異なる形式で起こる。これにより、時定数計算精度が高められる。なぜなら、閉ループ制御におけるステップ応答は開ループ制御におけるステップ応答に近づき、導出の際には考慮されない制御器の影響が減じられるからである。
【0041】
本発明による装置では、あらかじめ記述された診断関数をソフトウェアとしてエンジン制御部14に格納しておいてもよく、この場合、エンジン制御部14は、少なくとも1つの特性線ユニットを備え、この特性線に基づいて時定数TSを計算する。
【0042】
提案された上記方法およびその変化態様は、ここに紹介したラムダ制御およびラムダセンサ動特性診断以外のプロセスおよびセンサのためにも、このプロセスが時定数および場合によってはむだ時間を有する一次フィルタによって近似され、遅いセンサが付加的な一次フィルタによってモデル化され得る場合には、用いることができる。
【符号の説明】
【0043】
10 内燃機関
11 空気供給部
12 空気質量測定器
14 エンジン制御部
15 排ガスセンサ
16 排ガス浄化装置
17 排ガスセンサ
18 排ガス通路
20 特性線図
21 時定数比
【特許請求の範囲】
【請求項1】
内燃機関(10)の排ガス通路(18)に排ガス監視システムの一部として配置された排ガスセンサ(15)を有する内燃機関(10)のラムダ制御部を調整するための方法であって、内燃機関(10)に供給された空気・燃料混合物の空燃比の所定の変化後にモデル化され、測定された信号の比較に基づいて調整が行われ、測定された信号が、排ガスセンサ(15)の出力信号の実際値であり、モデル化された信号が、排ガスモデルを使用して内燃機関(10)に供給された空気・燃料混合物から導出したモデル値である、ラムダ制御部を調整するための方法において、
ラムダ制御部のラムダ制御器パラメータの段階的な調整を行い、測定された空燃比の値の最大傾斜と、モデルから予想される空燃比の値の最大傾斜との間の差を品質基準として用いることを特徴とする、ラムダ制御部を調整するための方法。
【請求項2】
前記差に基づいてラムダ制御器を調整し、この場合に、ラムダ制御器を段階的により大きいまたはより小さいシステム時定数の方向に適合させ、制御器適合の変数を前記差に関係して選択する、請求項1に記載の方法。
【請求項3】
前記差が適用可能な閾値よりも小さい場合には、段階的な調整を停止し、最終的に調節されたシステム時定数を、前記排ガスセンサ(15)の動特性診断のためにモデルとして検出された空燃比の経過のために使用する、請求項1または2に記載の方法。
【請求項4】
変更されたシステム時定数に制御器パラメータを適合させるために制御器ゲインの増大または低減および/または制御器内部のシステムモデルにおける時定数の適合を行う、請求項1から3までのいずれか一項に記載の方法。
【請求項5】
内燃機関(10)の排ガス通路(18)に排ガス監視システムの一部として配置された排ガスセンサ(15)を有する内燃機関(10)のラムダ制御部を調整するための方法であって、内燃機関(10)に供給された空気・燃料混合物の空燃比の所定の変化後に測定された信号に基づいて調整が行われ、測定された信号が排ガスセンサ(15)の出力信号の実際値である、ラムダ制御部を調整するための方法において、
測定された空燃比の値の最大傾斜から排ガスセンサ(15)のための時定数TSを計算することを特徴とする、ラムダ制御部を調整するための方法。
【請求項6】
時定数TSの導出を、2つの時定数を有する二次のシステムモデルに基づいて行い、開ループ制御でステップ応答を評価する、請求項5に記載の方法。
【請求項7】
2つの時定数を有する二次フィルタのステップ応答の最大傾斜を記述する解析的方程式のオフライン評価によって時定数TSの導出を行い、逆数特性線の形態の関数を診断ユニットに格納し、特性線へのアクセスによって時定数Tsを決定する、請求項5に記載の方法。
【請求項8】
請求項2から4までにしたがって検出されたシステム時定数に基づいて、または請求項5から7までにしたがって検出された時定数TSに基づいて、ラムダ制御器パラメータの調整を行う、請求項1から7までのいずれか一項に記載の方法。
【請求項9】
請求項2から4までにしたがって検出されたシステム時定数または請求項5から8までにしたがって検出された時定数TSを適用可能な閾値と比較し、これにより、動特性診断の範囲で排ガスセンサ(15)のための動的挙動を導出する、請求項1から8までのいずれか一項に記載の方法。
【請求項10】
診断時に制御器速度を低減する、請求項1から9までのいずれか一項に記載の方法。
【請求項11】
請求項1から10までのいずれか一項に記載の方法を、時定数ならびに場合によってはむだ時間を有する一次フィルタによってプロセスを近似させることができ、遅れたセンサの挙動を付加的な一次フィルタによって記述することができる、少なくとも1つのセンサによるプロセスで使用する使用法。
【請求項12】
内燃機関(10)の排ガス通路(18)に排ガス監視システムの一部として配置された排ガスセンサ(15)を有する内燃機関(10)のラムダ制御部を調整するための装置であって、内燃機関(10)に供給された空気・燃料混合物の空燃比の所定の変化後にモデル化され、測定された信号の比較に基づいて調整が行われ、測定された信号が、排ガスセンサ(15)の出力信号の実際値であり、モデル化された信号が、排ガスモデルを使用して内燃機関に供給された空気・燃料混合物から導出されたモデル値であり、診断ユニットで空気・燃料混合物を調整するために実際値とモデル値との比較が実施可能である、ラムダ制御部を調整するための装置において、
診断ユニットが、差分形成のための計算ユニットならびに特性線のための蓄積器ユニットおよび請求項1から10までにしたがって調整を行うための比較器を備え、排ガスセンサ(15)の動特性診断のために使用可能である排ガスセンサ(15)のための少なくとも1つの時定数が導出可能であることを特徴とする、ラムダ制御部を調整するための装置。
【請求項1】
内燃機関(10)の排ガス通路(18)に排ガス監視システムの一部として配置された排ガスセンサ(15)を有する内燃機関(10)のラムダ制御部を調整するための方法であって、内燃機関(10)に供給された空気・燃料混合物の空燃比の所定の変化後にモデル化され、測定された信号の比較に基づいて調整が行われ、測定された信号が、排ガスセンサ(15)の出力信号の実際値であり、モデル化された信号が、排ガスモデルを使用して内燃機関(10)に供給された空気・燃料混合物から導出したモデル値である、ラムダ制御部を調整するための方法において、
ラムダ制御部のラムダ制御器パラメータの段階的な調整を行い、測定された空燃比の値の最大傾斜と、モデルから予想される空燃比の値の最大傾斜との間の差を品質基準として用いることを特徴とする、ラムダ制御部を調整するための方法。
【請求項2】
前記差に基づいてラムダ制御器を調整し、この場合に、ラムダ制御器を段階的により大きいまたはより小さいシステム時定数の方向に適合させ、制御器適合の変数を前記差に関係して選択する、請求項1に記載の方法。
【請求項3】
前記差が適用可能な閾値よりも小さい場合には、段階的な調整を停止し、最終的に調節されたシステム時定数を、前記排ガスセンサ(15)の動特性診断のためにモデルとして検出された空燃比の経過のために使用する、請求項1または2に記載の方法。
【請求項4】
変更されたシステム時定数に制御器パラメータを適合させるために制御器ゲインの増大または低減および/または制御器内部のシステムモデルにおける時定数の適合を行う、請求項1から3までのいずれか一項に記載の方法。
【請求項5】
内燃機関(10)の排ガス通路(18)に排ガス監視システムの一部として配置された排ガスセンサ(15)を有する内燃機関(10)のラムダ制御部を調整するための方法であって、内燃機関(10)に供給された空気・燃料混合物の空燃比の所定の変化後に測定された信号に基づいて調整が行われ、測定された信号が排ガスセンサ(15)の出力信号の実際値である、ラムダ制御部を調整するための方法において、
測定された空燃比の値の最大傾斜から排ガスセンサ(15)のための時定数TSを計算することを特徴とする、ラムダ制御部を調整するための方法。
【請求項6】
時定数TSの導出を、2つの時定数を有する二次のシステムモデルに基づいて行い、開ループ制御でステップ応答を評価する、請求項5に記載の方法。
【請求項7】
2つの時定数を有する二次フィルタのステップ応答の最大傾斜を記述する解析的方程式のオフライン評価によって時定数TSの導出を行い、逆数特性線の形態の関数を診断ユニットに格納し、特性線へのアクセスによって時定数Tsを決定する、請求項5に記載の方法。
【請求項8】
請求項2から4までにしたがって検出されたシステム時定数に基づいて、または請求項5から7までにしたがって検出された時定数TSに基づいて、ラムダ制御器パラメータの調整を行う、請求項1から7までのいずれか一項に記載の方法。
【請求項9】
請求項2から4までにしたがって検出されたシステム時定数または請求項5から8までにしたがって検出された時定数TSを適用可能な閾値と比較し、これにより、動特性診断の範囲で排ガスセンサ(15)のための動的挙動を導出する、請求項1から8までのいずれか一項に記載の方法。
【請求項10】
診断時に制御器速度を低減する、請求項1から9までのいずれか一項に記載の方法。
【請求項11】
請求項1から10までのいずれか一項に記載の方法を、時定数ならびに場合によってはむだ時間を有する一次フィルタによってプロセスを近似させることができ、遅れたセンサの挙動を付加的な一次フィルタによって記述することができる、少なくとも1つのセンサによるプロセスで使用する使用法。
【請求項12】
内燃機関(10)の排ガス通路(18)に排ガス監視システムの一部として配置された排ガスセンサ(15)を有する内燃機関(10)のラムダ制御部を調整するための装置であって、内燃機関(10)に供給された空気・燃料混合物の空燃比の所定の変化後にモデル化され、測定された信号の比較に基づいて調整が行われ、測定された信号が、排ガスセンサ(15)の出力信号の実際値であり、モデル化された信号が、排ガスモデルを使用して内燃機関に供給された空気・燃料混合物から導出されたモデル値であり、診断ユニットで空気・燃料混合物を調整するために実際値とモデル値との比較が実施可能である、ラムダ制御部を調整するための装置において、
診断ユニットが、差分形成のための計算ユニットならびに特性線のための蓄積器ユニットおよび請求項1から10までにしたがって調整を行うための比較器を備え、排ガスセンサ(15)の動特性診断のために使用可能である排ガスセンサ(15)のための少なくとも1つの時定数が導出可能であることを特徴とする、ラムダ制御部を調整するための装置。
【図1】


【図2】
【図2】
【公開番号】特開2013−92147(P2013−92147A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2012−233508(P2012−233508)
【出願日】平成24年10月23日(2012.10.23)
【出願人】(591245473)ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング (591)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成24年10月23日(2012.10.23)
【出願人】(591245473)ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング (591)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【Fターム(参考)】
[ Back to top ]