
ラム波型共振子及び発振器
【課題】ラム波の伝搬方向に垂直方向の振動漏れを抑制するラム波型共振子を提供する。
【解決手段】ラム波型共振子1は、電極指片21a〜21c,22a,22bの一方の端部を接続するバスバー電極21d,22cを有し、前記複数の電極指片の先端部を互いに間挿してなるIDT電極20と、一対の反射器25,26と、が水晶基板10の一方の主面に設けられ、ラム波の波長をλとすると、水晶基板の厚さtが、0<t/λ≦3であり、電極指片の交差領域の電極指片の線幅比η_IDT、波長λで規格化した規格化電極膜厚H_IDT/λ、ギャップ部の電極指片の線幅比η_g、波長λで規格化した規格化電極膜厚H_g/λ、とすると、η_IDT=η_g=0のときの周波数Fを基準とした場合の前記交差領域での周波数変化ΔF_IDT/Fと、前記ギャップ部での周波数変化ΔF_g/Fと、の関係が、ΔF_IDT/F<ΔF_g/F、を満たす。
【解決手段】ラム波型共振子1は、電極指片21a〜21c,22a,22bの一方の端部を接続するバスバー電極21d,22cを有し、前記複数の電極指片の先端部を互いに間挿してなるIDT電極20と、一対の反射器25,26と、が水晶基板10の一方の主面に設けられ、ラム波の波長をλとすると、水晶基板の厚さtが、0<t/λ≦3であり、電極指片の交差領域の電極指片の線幅比η_IDT、波長λで規格化した規格化電極膜厚H_IDT/λ、ギャップ部の電極指片の線幅比η_g、波長λで規格化した規格化電極膜厚H_g/λ、とすると、η_IDT=η_g=0のときの周波数Fを基準とした場合の前記交差領域での周波数変化ΔF_IDT/Fと、前記ギャップ部での周波数変化ΔF_g/Fと、の関係が、ΔF_IDT/F<ΔF_g/F、を満たす。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ラム波型共振子と、このラム波型共振子を備える発振器に関する。
【背景技術】
【0002】
ラム波とは、伝搬させる波の数波長以下に基板厚さを薄くすることで、基板内部を伝搬するバルク波が基板の上下面での反射を繰り返し伝搬する板波である。基板表面から深さ1波長以内にエネルギーの90%を有するレイリー波、漏洩弾性表面波、擬似縦波型漏洩弾性表面波の表面波とは異なり、ラム波は基板内部を伝搬するバルク波であるためエネルギーは基板全体に分布している。
【0003】
非特許文献1によると、板波とレイリー波は学術的にも区別されている。また、非特許文献2にはレイリー波、漏洩弾性表面波の解析方法、非特許文献3にはラム波の解析方法が示されている。大きな違いは8次方程式の解の選択方法が各々の波で異なり、レイリー波とラム波は全く別の波であって性質が異なる。従って、ラム波はレイリー波と同様の設計条件では良好な特性が得られないため、ラム波を対象とした設計方法が必要である。
【0004】
ラム波の特徴として、特許文献1に示されている分散曲線にあるように、ラム波の伝搬可能なモードは、基板厚み方向の波数が共振条件を満たすモードであり、ラム波には高次を含め多数のモードが存在する。
【0005】
存在するモードの位相速度はレイリー波以上であり、縦波以上の位相速度をもったモードも多数存在しているため、位相速度が高いモードほど上記の表面波と同じ電極指幅でも容易に高周波化が可能となる。また、厚さが5波長以下のATカット水晶基板を用いることにより、温度特性が優れ、高周波化に適したラム波を利用できる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−258596号公報
【特許文献2】特開2008−54163号公報
【非特許文献】
【0007】
【非特許文献1】超音波便覧、超音波便覧編集委員会編集、丸善株式会社出版。1999年発行 第62頁〜第71頁
【非特許文献2】弾性波素子技術ハンドブック、学振150委編集、オーム社出版。1991年発行 第148頁〜第158頁
【非特許文献3】中川恭彦、重田光善、柴田和匡、垣尾省司著、ラム波型弾性波素子用基板の温度特性、電子情報通信学会論文誌 C NO.1。第34頁〜第39頁
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述した特許文献1によれば、電極として重い金属を用いており、そのことによりラム波の反射係数を高め、少ない反射器本数でエネルギーを閉じ込められるため小型化が可能と記載されている。これは縦方向(ラム波の伝搬方向)の振動漏れを抑えることによりエネルギーを閉じ込めることを意味している。しかし、横方向(ラム波の伝搬方向に対し垂直方向のこと)のエネルギー閉じ込めについては考慮されていないため、必ずしも最適電極設計であるとは言い難い。また、特許文献2においても、横方向のエネルギー閉じ込めを高めるための具体的な手段は開示されていない。
【0009】
もし、横方向(ラム波の伝搬方向に対して垂直方向)に振動漏れが生じていると、ラム波の良好な特性を生かしきれず、共振特性を評価するうえで重要なファクターであるQ値の低下、CI値の増加を招くことが考えられる。その結果、発振器に適用した場合に十分な特性が得られず、消費電力の増加や発振が停止するといった深刻な問題が生じる。
また、横方向の振動漏れが圧電基板の横方向外端部に至ると、圧電基板外端部からの反射波によりスプリアスが生じてしまう。
【課題を解決するための手段】
【0010】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0011】
[適用例1]本適用例に係るラム波型共振子は、複数の電極指片の一方の端部を接続するバスバー電極を有し、前記複数の電極指片の先端部を互いに間挿してなるIDT電極と、前記IDT電極のラム波の伝搬方向両側に配設される一対の反射器と、が圧電基板の一方の主面に設けられ、ラム波の波長をλとしたとき、前記圧電基板の厚さtが、0<t/λ≦3であり、前記IDT電極の電極指線幅をλ/2で除した値を線幅比とし、前記電極指片の交差領域の線幅比をη_IDT、波長λで規格化した規格化電極膜厚をH_IDT/λ、前記交差領域のラム波の伝搬方向に対して垂直方向端部と前記バスバー電極との間の領域であるギャップ部の電極指片の線幅比をη_g、波長λで規格化した規格化電極膜厚をH_g/λ、としたとき、η_IDT=η_g=0のときの周波数Fを基準とした場合の前記交差領域での周波数変化ΔF_IDT/Fと、前記ギャップ部での周波数変化ΔF_g/Fと、の関係が、ΔF_IDT/F<ΔF_g/F、を満たすように、H_IDT/λ、H_g/λ、η_IDT、η_gのそれぞれが設定されていることを特徴とする。
【0012】
詳しくは、後述する実施形態で説明するが、ラム波の位相速度は、規格化基板厚み(t/λ)に依存する性質があり、規格化基板厚みを薄くすると位相速度が高くなる。
【0013】
このラム波型共振子には、複数のモードが存在し、規格化基板厚みt/λが大きくなるに従い、各モードにおける位相速度が3000(m/s)〜6000(m/s)の範囲で集約されており、特に5000(m/s)〜6000(m/s)の範囲では密集している。
【0014】
このようにモードが密集している場合には、モード結合が起こりやすく、所望のモードが得られないこと、または、位相速度が変動しやすいことが考えられる。そこで、規格化基板厚みをt/λ≦3に設定することで、モード結合のしやすい範囲を回避することができる。
【0015】
また、η_IDT=η_g=0のときの周波数Fを基準とした場合の交差領域での周波数変化ΔF_IDT/Fと、ギャップ部での周波数変化ΔF_g/Fと、の関係を、ΔF_IDT/F<ΔF_g/Fとしている。つまり、ギャップ部のラム波の位相速度は交差領域のラム波の位相速度よりも速くなる。このことにより、ラム波の伝搬方向に対して垂直な横方向の変位がギャップ部より外側において収束し、振動漏れがほとんどない状態、つまり、エネルギーが閉じ込められている状態を得ることができる。
【0016】
このように、横方向の振動漏れを抑制することにより、圧電基板の横方向外端部で発生する反射波の振幅を格段に小さくすることができ、圧電基板の横方向外端部からの反射波によるスプリアスを低減することができる。
【0017】
さらに、圧電基板の横方向外端部からの反射波によるスプリアスを低減することにより、ラム波型共振子の共振特性を評価する上で重要なファクターであるQ値の低下やCI値の増加を抑制する。従って、高いQ値はラム波型共振子の発振を安定維持することができ、低いCI値は消費電力の減少を実現できる。
【0018】
[適用例2]上記適用例に係るラム波型共振子において、前記圧電基板は、オイラー角(φ、θ、ψ)が、−1度≦φ≦+1度、35.0度≦θ≦47.2度、−5度≦ψ≦+5度の範囲であって、且つ厚さtとラム波の波長λとの関係が、0.176≦t/λ≦1.925を満たす水晶基板であることが好ましい。
【0019】
ラム波型共振子の周波数温度特性、周波数帯域、励振の安定性は、水晶基板の切り出し角度と弾性波の伝搬方向によって律せられる。つまり、オイラー角(0°、θ、0°)における角度θと、基板厚みtと波長λとの関係で表される規格化基板厚みt/λにて律せられる。
【0020】
角度φと、角度θと、角度ψと、規格化基板厚みt/λと、を上述したような関係式とすることで、STWカット水晶、またはSTカット水晶に比べ優れた周波数温度特性と、高周波帯域への対応が可能となる。
【0021】
また、水晶基板の励振の効率を表す電気機械結合係数(K2)を高めることができるので、励振し易く、安定した周波数温度特性をもつラム波型共振子を提供することができる。
【0022】
[適用例3]上記適用例に係るラム波型共振子において、前記複数の電極指片の交差幅が20λ以上であることが好ましい。
【0023】
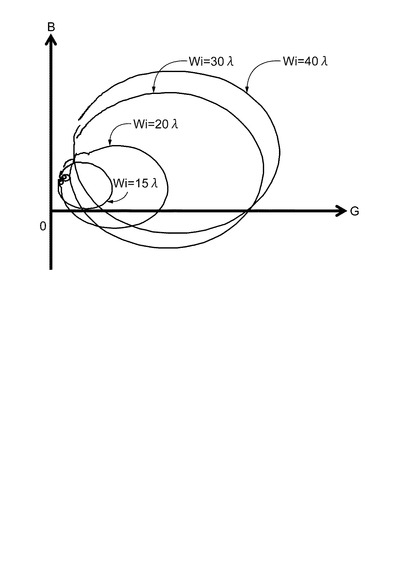
このラム波型共振子は、発振器への応用を考えた場合、発振回路と組み合わせたときの発振条件を満たさなければ発振器に適用できない。しかし、実施の形態で後述する共振周波数近傍のアドミッタンス円線図の測定結果によれば、交差幅が20λ以上であればアドミッタンスBが、B<0となり誘導性であるために、ラム波型共振子と発振回路とを組んだ場合に安定して発振させることができる。
【0024】
[適用例4]上記適用例に係るラム波型共振子において、前記電極指片の交差領域の密度ρ_IDTと、前記ギャップ部の電極指片の密度ρ_gと、の関係が、ρ_IDT>ρ_gであることが好ましい。
【0025】
なお、IDT電極の材質としては、例えば、ギャップ部をAlまたはAlを主成分とする金属、交差領域をCu,Ag,Auまたはこれらを主成分とする金属とすることができる。
【0026】
本適用例によれば、上述したH_IDT/λ、H_g/λ、η_IDT、η_gを適切に設定した場合と同様に、ΔF_IDT/F<ΔF_g/Fの条件を満たすことが可能で、ラム波の伝搬方向に対して垂直な横方向の変位がギャップ部より外側において収束し、振動漏れがほとんどない状態、つまり、エネルギーが閉じ込められている状態を得ることができる。
【0027】
[適用例5]上記適用例に係るラム波型共振子において、前記電極指片の交差領域の表面に、絶縁性を有する膜が設けられていることが好ましい。
【0028】
ここで、絶縁性を有する膜としては、例えば、SiO2、Si、SiXNY、Al2O3、ZnO、Ta2O5等を採用できる。
【0029】
本適用例によれば、電極指片の交差領域の表面に絶縁性を有する膜を設けることにより、交差部とギャップ部の電極指片の質量付加効果が変わる。このことにより、電極指片の交差領域とギャップ部とに互いに密度が異なる金属を用いる場合と同様に、ΔF_IDT/F<ΔF_g/Fの条件を満たすことが可能で、ラム波の伝搬方向に対して垂直な横方向の変位がギャップ部より外側において収束し、振動漏れがほとんどない状態、つまり、エネルギーが閉じ込められている状態を得ることができる。
【0030】
[適用例6]本適用例に係る発振器は、上記適用例のいずれかに記載のラム波型共振子と、前記ラム波型共振子を励振するための発振回路と、が備えられていることを特徴とする。
【0031】
本適用例によれば、圧電基板として水晶基板を用いると共に、上述した最適基板厚さ及び最適なIDT電極の構成を有するラム波型共振子を用いることで、横方向の振動漏れを抑制して高Q値、低CI値、及び周波数温度特性に優れた発振器を提供することができる。
【図面の簡単な説明】
【0032】
【図1】実施形態1に係る水晶基板の切り出し方位とラム波伝搬方向を示す説明図。
【図2】実施形態1に係るラム波型共振子の基本形状を示し、(a)は概略構造を示す斜視図、(b)は、(a)のA−A切断面を示す断面図。
【図3】規格化基板厚みt/λと位相速度との関係を示すグラフ。
【図4】ラム波型共振子の1例を示し、(a)は主面方から視認した平面図、(b)は(a)のB−B切断面を示す断面図。
【図5】電極線幅比ηと、電極指片の各部位の規格化基板厚さと、周波数シフト(ppm)との関係を表すグラフ。
【図6】電極指片の交差領域の線幅比η_IDT=0.5とした場合に、ギャップ部の線幅比η_gを変化したときのQ値の変化を表すグラフ。
【図7】電極指片の交差領域の線幅比η_IDT=0.8とした場合に、ギャップ部の線幅比η_gを変化したときのQ値の変化を表すグラフ。
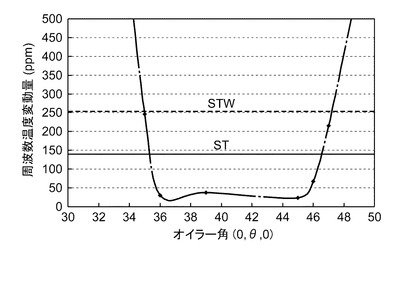
【図8】周波数温度変動量(ppm)とオイラー角(0°、θ、0°)における角度θの関係を示すグラフ。
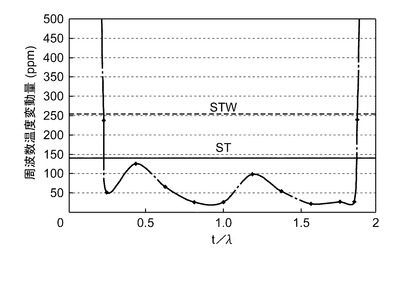
【図9】周波数温度変動量(ppm)と規格化基板厚みt/λとの関係を示すグラフ。
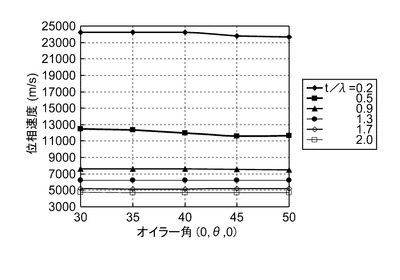
【図10】オイラー角(0°、θ、0°)における角度θと位相速度との関係を示すグラフ。
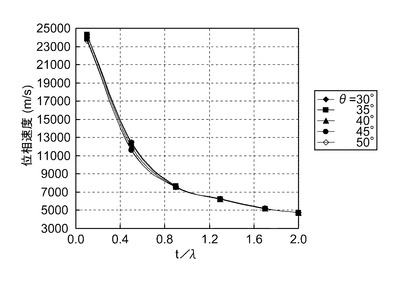
【図11】規格化基板厚みt/λと位相速度との関係を示すグラフ。
【図12】角度θと位相速度と周波数温度変動量との関係を示すグラフ。
【図13】角度θと電気機械結合係数K2と周波数温度変動量との関係を示すグラフ。
【図14】規格化基板厚みt/λと位相速度と周波数温度変動量との関係を示すグラフ。
【図15】規格化基板厚みt/λと電気機械結合係数K2と周波数温度変動量との関係を示すグラフ。
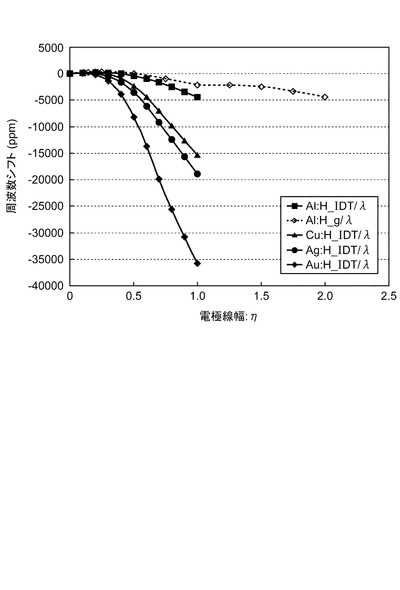
【図16】交差領域にAl,Cu,Ag,Auを、ギャップ部にAlを用いたときの電極線幅比ηと周波数変化(周波数シフトと表す)の関係を示すグラフ。
【図17】実施例3に係るラム波型共振子の概略構成を示す平面図。
【図18】共振周波数近傍のアドミッタンス円線図。
【発明を実施するための形態】
【0033】
以下、本発明の実施形態を図面に基づいて説明する。
なお、以下の説明で参照する図は、図示の便宜上、部材ないし部分の縦横の縮尺は実際のものとは異なる模式図である。
(実施形態1)
【0034】
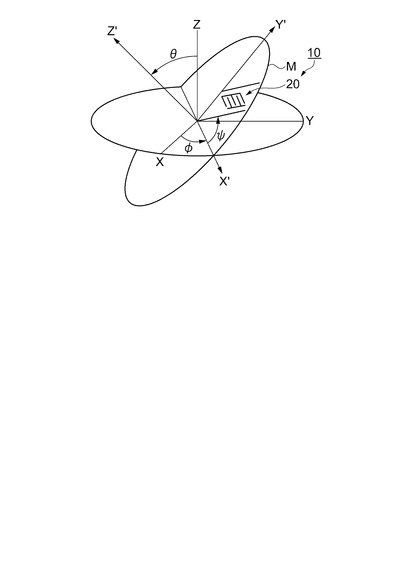
図1は、本実施形態に係る水晶基板の切り出し方位とラム波伝搬方向を示す説明図、即ちオイラー角(φ,θ,ψ)の説明図である。圧電基板としての水晶基板10の切り出し方位は、電気軸と呼ばれるX軸、機械軸と呼ばれるY軸、光学軸と呼ばれるZ軸によって定義される。
【0035】
オイラー角(0°,0°,0°)で表される水晶基板10は、Z軸に垂直な主面を有するZカット基板となる。ここで、オイラー角のφはZカット基板の第1の回転に関するものであり、Z軸を回転軸とし、+X軸から+Y軸側へ回転する方向を正の回転角度とした第1回転角度である。
【0036】
オイラー角のθはZカット基板の第1の回転後に行う第2の回転に関するものであり、第1の回転後のX軸を回転軸とし、第1の回転後の+Y軸から+Z軸へ回転する方向を正の回転角度とした第2回転角度である。水晶基板10のカット面は、第1回転角度φと第2回転角度θとで決定される。
【0037】
オイラー角のψはZカット基板の第2の回転後に行う第3の回転に関するものであり、第2の回転後のZ軸を回転軸とし、第2の回転後の+X軸から第2の回転後の+Y軸側へ回転する方向を正の回転角度とした第3回転角度である。ラム波の伝搬方向は第2の回転後のX軸に対する第3回転角度ψで表される。
【0038】
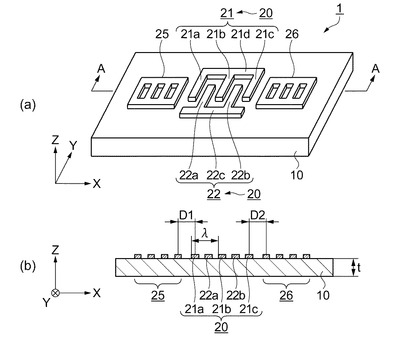
図2は、実施形態1に係るラム波型共振子の基本形状を示し、(a)は概略構造を示す斜視図、(b)は、(a)のA−A切断面を示す断面図である。本実施形態における水晶基板10の切り出し方位は、厚み方向のZ軸をZ’まで角度θだけ回転させた回転Yカット水晶であり、図中、長手方向がX軸、幅方向がY’、厚み方向がZ’となるように切り出されている(図1、参照)。
【0039】
図2(a),(b)において、このラム波型共振子1は、水晶基板10と、水晶基板10の一方の主面のX軸方向に形成される櫛歯形状のIDT電極(Interdigital Transducer)20と、IDT電極20のラム波の伝搬方向両側に設けられる一対の反射器25,26と、から構成されている。従って、ラム波の伝搬方向はX軸方向となる。
【0040】
また、水晶基板10の厚さをt、伝搬されるラム波の波長をλとしたときに、規格化基板厚みt/λは、0<t/λ≦3で表される範囲に設定されている。
【0041】
IDT電極20はAl電極からなり、入力IDT電極21とGND(グランド)IDT電極22とから構成されている。GND(グランド)IDT電極22は、必ずしも接地する必要はなく、信号線に接続することも可能である。入力IDT電極21は、複数の電極指片21a,21b,21cが平行で同じ長さで形成され、これら複数の電極指片の一方の端部はバスバー電極21dで接続されている。GNDIDT電極22は、複数の電極指片22a,22bが平行で同じ長さに形成され、これら複数の電極指片の一方の端部はバスバー電極22cで接続されている。
【0042】
入力IDT電極21と、GNDIDT電極22とは互いの電極指片の先端部が間挿されている。電極指片21a,21b,21cの先端部は、バスバー電極22cと間隙を有して配設される。また、電極指片22a,22bの先端部はバスバー電極21dと間隙を有して配設される。
【0043】
なお、入力IDT電極21の電極指片21a,21b,21cと、GNDIDT電極22の電極指片22a,22bと、が間挿されたときに互いの電極指片が交差する幅を交差幅と表す。
【0044】
なお、図2に記載のIDT電極20の電極指片及び反射器25,26の電極指片の数は簡略化しており、実際にはそれぞれ数十本から数百本設けられる。
【0045】
水晶基板10は、電気軸と呼ばれるX軸、機械軸と呼ばれるY軸、光学軸と呼ばれるZ軸の面で構成される薄板である。しかし、本実施形態における水晶基板10の切り出し方位は、厚み方向のZ軸をZ’まで角度θだけ回転させた回転Yカット水晶であり、図2では、水晶基板10の図示の軸方向を表している。従って、厚さ方向をZ、ラム波の伝搬方向をX、ラム波の伝搬方向に対して垂直方向をYで表している。なお、X方向を縦方向、Y方向を横方向と表すことがある。
【0046】
本実施形態では、電極指片21a,21b,21cのピッチ、電極指片22a,22bのピッチをλ(ラム波の波長)とし、各電極指片の幅及び各電極指片間の距離を(1/4)λとしている。
【0047】
ラム波型共振子1は、入力IDT電極21に所定の周波数で入力される駆動信号によって水晶基板10が励振されるが、この励振された弾性波は、水晶基板のX方向に向かって水晶基板10の表裏の面内を反射しながら伝搬していく。このように伝搬される弾性波をラム波と呼称している。
【0048】
IDT電極20の構造はSAW共振子と似ているが、用いている波の種類が異なるため特性も異なり、設計条件も当然異なる。そして、IDT電極20から伝搬されるラム波は反射器25,26によって反射される。
【0049】
従って、電極指片21aのラム波の伝搬方向中心から反射器25の最も電極指片21a寄りのラム波の伝搬方向中心までの距離D1、同様に電極指片21cとの距離D2は、(1/2)nλ(nは整数)に設定され、反射波が、所定の周波数で、駆動信号と位相が一致するように設定されている。
なお、電極指片21aと反射器25との距離、電極指片21cと反射器26との距離は(1/2)λ以外であってもよい。
【0050】
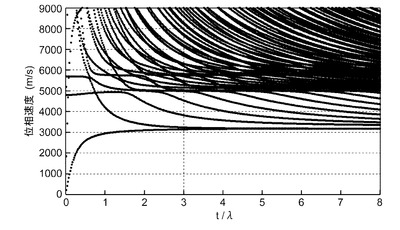
続いて、規格化基板厚みt/λと位相速度との関係について図面を参照して説明する。
図3は、規格化基板厚みt/λと位相速度との関係を示すグラフである。横軸には規格化基板厚みt/λ、縦軸には位相速度(m/s)を示している。また、圧電基板として水晶基板10を用いたときのラム波型共振子を例示している。
【0051】
図3によれば、このラム波型共振子1には、複数のモードが存在していることが示され、規格化基板厚みt/λが大きくなるに従い、各モードにおける位相速度が3000(m/s)〜6000(m/s)の範囲で集約されており、特に5000(m/s)〜6000(m/s)の範囲では密集している。
【0052】
このようにモードが密集している場合には、モード結合が起こりやすく、所望のモードが得られないこと、または、位相速度が変動しやすいことが考えられる。そこで、規格化基板厚みをt/λ≦3に設定することで、モード結合のしやすい範囲を回避することができる。
【0053】
また、図3によれば、規格化基板厚みt/λが小さいほど位相速度が高まる傾向が示され、規格化基板厚みがt/λ≦3においては、位相速度が6000(m/s)以上のモードが多数存在している。位相速度は周波数と波長の積によって表されるため、このラム波型共振子が高周波に対応可能であることを示している。
【0054】
ラム波型共振子に関して、基礎特性に関する文献はあるが、横方向(Y方向)のエネルギー閉じ込めに関する文献は見当たらず、最適設計条件は不明確であった。そこで、ラム波の横方向のエネルギー閉じ込めに関して詳細に調査を進めてきた。
【0055】
その結果、ラム波は水晶SAWと比較して横方向に振動漏れが発生しやすく、電極指片の交差幅WiとギャップWgの設計条件に敏感であり、横方向のエネルギーを閉じ込めるためには、交差幅Wiの範囲の位相速度をギャップWgの範囲の位相速度よりも遅くすることが有効であることが分かった。
【0056】
次に、ラム波の横(Y)方向の変位を支配する微分方程式について述べる。この微分方程式はラム波型共振子の振動エネルギーを長さと深さ方向に積分して得られるラグランジアンL=T−U(Tは運動エネルギー、Uは位置エネルギー)から得られるもので次式で表される。
【0057】
【数1】

【0058】
ただし、U(Y)は幅方向変位、Yはラム波の波長λで規格化したy座標(y/λ)、a定数は横方向の剪断効果係数、ωは角周波数、ω0は電極指片の交差幅が無限大のラム波型共振子が有する角周波数である。a定数は解析結果、もしくは測定結果から得られるものであり、本実施形態では0.021であった。この微分方程式に基づきラム波型共振子の横方向の変位を計算した。
続いて、具体的な実施例について図面を参照して説明する。
(実施例1)
【0059】
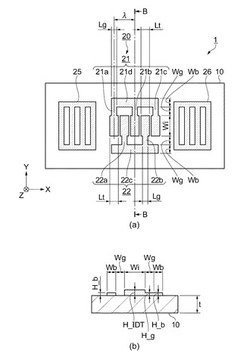
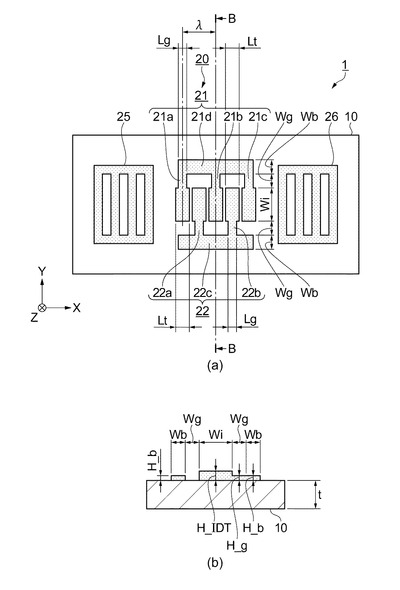
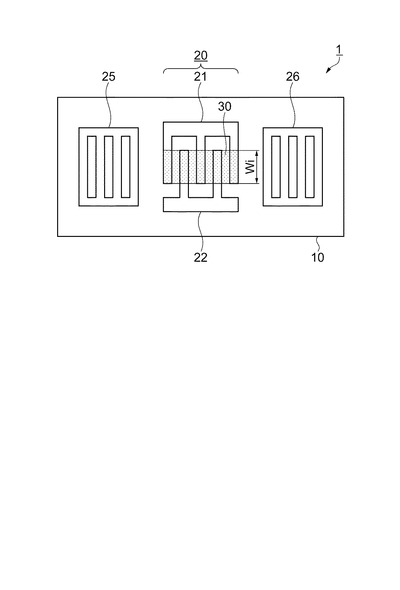
図4は、ラム波型共振子の1例を示し、(a)は主面方から視認した平面図、(b)は(a)のB−B切断面を示す断面図である。まず、本実施例にて提案する最適電極設計パラメーターについて説明する。
【0060】
図4(a)において、電極指片21a,21b,21cと電極指片22a,22bとが間挿されたときに互いに交差する交差領域の電極指片21a〜21c,22a,22bの電極指線幅Lt(以降、単に線幅と表すことがある)は、ギャップ部の電極指線幅Lgよりも広く形成されている。
【0061】
ここで、IDT電極20の電極指線幅をλ/2で除した値を線幅比とし、各電極指片の交差領域の線幅比をη_IDT、交差領域のラム波の伝搬方向(X方向)に対して垂直方向(Y方向)端部とバスバー電極21d,22cとの間の領域(以降、ギャップ部と表す)の電極指片の線幅比をη_gとし、電極指片21a,21b,21c、電極指片22a,22bそれぞれのピッチを波長λとする。従って、電極指片21aと電極指片22aとのピッチは1/2λである。
【0062】
また、電極指片の交差領域の幅をWi,ギャップ部の幅(距離)をWg,バスバー電極の幅をWbで表す。
【0063】
なお、反射器25,26、及びIDT電極20の関係は、前述した図2と同様に設定されるので説明を省略する。また、水晶基板10の規格化基板厚みt/λは、0<t/λ≦3の範囲に設定されている。
【0064】
次に、ラム波型共振子1の断面構成について図4(b)を参照して説明する。電極指片の交差領域(交差幅Wiの範囲)の厚さをH_IDT、ギャップ部(距離Wgの範囲)の厚さをH_g、波長λで規格化した規格化電極膜厚H_IDT/λ、バスバー電極(幅Wbの範囲)の厚さをH_bとし、波長λで規格化した規格化電極膜厚H_g/λとする。なお、ギャップ部の厚さとバスバー電極の厚さをH_g=H_bとしている。
【0065】
続いて、電極線幅比ηと周波数変化(周波数シフトと表すことがある)の関係について説明する。ここで、η_IDT=η_g=0の場合の周波数を基準とし、交差領域の周波数をF_IDT、ギャップ部の周波数をF_g、それぞれの周波数シフトをΔF_IDT/F、ΔF_g/Fで表し、以下の計算式を用いて周波数シフトについて解析する。まず、交差領域の周波数シフトΔF_IDT/Fを求める計算式を[数2]に示す。
【0066】
また、本実施例では、オイラー角(0°,42°,0°)、規格化基板厚さt/λ=1.6として計算した。
【0067】
【数2】
【0068】
次に、電極線幅比η≦1.0の場合のギャップ部の周波数シフトΔF_g/Fを求める計算式を[数3]に示す。
【0069】
【数3】
【0070】
次に、電極線幅比η>1.0のギャップ部の周波数シフトΔF_g/Fを求める計算式を[数4]に示す。
【0071】
【数4】
【0072】
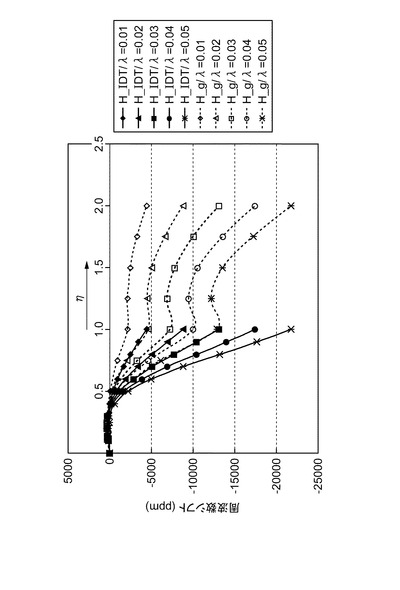
続いて、上述の各数式により求めた解析結果について説明する。
図5は、電極線幅比ηと、電極指片の各部位の規格化基板厚さと、周波数シフト(ppm)との関係を表すグラフである。横軸に電極線幅比η、縦軸の周波数シフトを表し、H_IDT/λ=0.01〜0.05の範囲(図中、実線で表す)、H_g/λ=0.01〜0.05の範囲(図中、破線で表す)における周波数シフトの解析結果を示している。
【0073】
図5において線幅比ηが0.3以上であり、且つ、電極指片の交差領域の電極厚さH_IDTをラム波の波長λで除した規格化電極厚さH_IDT/λが、ギャップ部の電極厚さH_g(規格化基板厚さH_g/λで表す)よりも厚い場合には、ΔF_IDT/F<ΔF_g/Fの関係となる。つまり、ギャップ部の周波数(ラム波の位相速度)は、交差領域の周波数(ラム波の位相速度)よりも高くなる。
【0074】
このようにギャップ部の周波数(ラム波の位相速度)を交差領域の周波数(ラム波の位相速度)よりも高くすることにより、ギャップ部の領域から横方向のエネルギーを閉じ込めることができる。従って、ΔF_IDT/F<ΔF_g/Fの関係を満たすH_IDT/λ、H_g/λ、η_IDT、η_gを適切に設定することで、横方向のエネルギーを閉じ込めることができる。
【0075】
なお、IDT電極20及び反射器25,26は、フォトリソ工程により形成される。フォトリソ工程においては、各電極の断線、パターン抜け、ショート等を防止するため、電極幅、電極厚さを設定することが望まれる。従って、0.01≦H_IDT/λ≦0.05、0.01≦H_g/λ≦0.05、0.1≦η_IDT≦0.9、0.1≦η_g≦0.9の範囲に設定されることがより好ましい。
【0076】
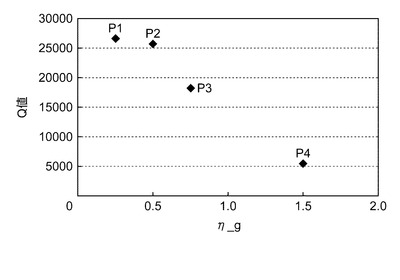
次に、ラム波型共振子の共振特性を評価するうえで重要なファクターであるQ値について説明する。
図6は、電極指片の交差領域の線幅比η_IDT=0.5とした場合に、ギャップ部の線幅比η_gを変化したときのQ値の変化を表すグラフである。
【0077】
図5から、η_IDTを0.5と一定にした場合、η_gが0.612を境界点として周波数の大小が逆転する。このことから、図6において、η_g<0.612の範囲では、ΔF_IDT/F<ΔF_g/FとなるためQ値の劣化はないが、η_g>0.612ではΔF_IDT/F>ΔF_g/Fと逆転するためQ値は劣化している。
【0078】
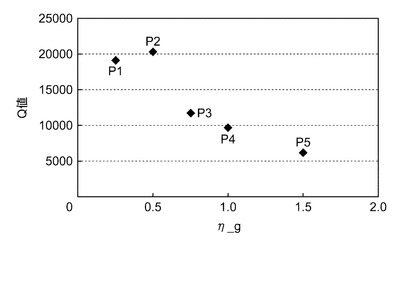
図7は、電極指片の交差領域の線幅比η_IDT=0.8とした場合に、ギャップ部の線幅比η_gを変化したときのQ値の変化を表すグラフである。図5において、η_IDT=0.8では、η_gが1.514を境界点として周波数の大小関係が逆転する。
【0079】
しかし、η_g<1.514の範囲ではΔF_IDT/F<ΔF_g/FであるためQ値の劣化は少ないはずだが、図7では、Q値が劣化している。これは、ΔF_IDT/FとΔF_g/Fの周波数差ΔFの大小が関係していることによる。
【0080】
例えば、η_g=0.25ではΔF=2817ppmに対し、η_g=1.5ではΔF=31ppmと非常に小さい。従って、ΔF_IDT/F<ΔFg/FにおいてもΔFが大きい方が、エネルギーの閉じ込めはより強く、高Q値、低CI(Crystal Impedance)値を実現できることを示している。
【0081】
なお、図6において、η_gに対するQ値の変化を示す各点(P1〜P4)のうち、点P1のときのΔFは、ΔF=684ppmである。
【0082】
また、図7において、η_gに対するQ値の変化を示す各点(P1〜P5)のうち、点P3のときのΔFは、ΔF=1599ppmである。
【0083】
図6,7から、ΔF_IDT/F<ΔFg/Fであって、ΔF_IDT/FとΔFg/Fとの差は684ppm以上とすることがより好ましい。
なお、本実施形態ではオイラー角(0°,42°,0°)の水晶基板を用いたが、必ずしもこれには限定されず、水晶基板のオイラー角(φ、θ、ψ)を、−1度≦φ≦+1度、35.0度≦θ≦47.2度、−5度≦ψ≦+5度の範囲で選択すれば、同様の効果を奏する。
【0084】
以上説明した本実施例によれば、ラム波の位相速度は、水晶基板10の規格化基板厚み(t/λ)に依存する性質があり、規格化基板厚みを薄くすると位相速度が高くなる。
【0085】
このラム波型共振子には、複数のモードが存在し、規格化基板厚みt/λが大きくなるに従い、各モードにおける位相速度が3000(m/s)〜6000(m/s)の範囲で集約されており、特に5000(m/s)〜6000(m/s)の範囲では密集している。
【0086】
このようにモードが密集している場合には、モード結合が起こりやすく、所望のモードが得られないこと、または、位相速度が変動しやすいことが考えられる。そこで、水晶基板10の規格化基板厚みを0<t/λ≦3に設定することで、モード結合のしやすい範囲を回避することができる。
【0087】
また、η_IDT=η_g=0のときの周波数Fを基準とした場合の交差領域での周波数変化ΔF_IDT/Fと、ギャップ部での周波数変化ΔF_g/Fと、の関係を、ΔF_IDT/F<ΔF_g/Fとしている。つまり、ギャップ部のラム波の位相速度は交差領域のラム波の位相速度よりも速くなる。このことにより、ラム波の伝搬方向に対して垂直な横方向の変位がギャップ部より外側において収束し、振動漏れがほとんどない状態、つまり、エネルギーが閉じ込められている状態を得ることができる。
【0088】
このように、横方向の振動漏れを抑制することにより、水晶基板10の横方向外端部で発生する反射波の振幅を格段に小さくすることができ、水晶基板10の横方向外端部からの反射波によるスプリアスを低減することができる。
【0089】
さらに、水晶基板10の横方向外端部からの反射波によるスプリアスを低減することにより、ラム波型共振子の共振特性を評価する上で重要なファクターであるQ値の低下やCI値の増加を抑制する。従って、高いQ値はラム波型共振子の発振を安定維持することができ、低いCI値は消費電力の減少を実現できる。
【0090】
続いて、前述したラム波型共振子1(図2,3、参照)における位相速度と規格化基板厚みt/λ及びオイラー角(0°,θ,0°)における角度θそれぞれに対する周波数温度偏差(周波数温度変動量)、位相速度、電気機械結合係数K2の関係についてシミュレーションにより算出した結果について図面を参照して説明する。
【0091】
図8は、周波数温度変動量(ppm)とオイラー角(0°、θ、0°)における角度θの関係を示すグラフである。図8において、ラム波型共振子1は、角度θが35.0度≦θ≦47.2度の範囲において、STWカット水晶よりも周波数温度特性がよいことを示している。
【0092】
なお、オイラー角の角度θは、36度≦θ≦45度にすることがより望ましい。この角度θの領域では、周波数温度変動量がほぼフラットとなりSTカット水晶よりも周波数温度特性が優れる。
【0093】
図9は、周波数温度変動量(ppm)と規格化基板厚みt/λとの関係を示すグラフである。図9に示すように、規格化基板厚みt/λが、0.176≦t/λ≦1.925の範囲において、STWカット水晶及びSTカット水晶よりも優れた周波数温度特性を有する。
【0094】
次に、角度θ及び規格化基板厚みt/λと位相速度、周波数温度変動量、電気機械結合係数K2相互の関係について詳しく説明する。
図10は、オイラー角(0°、θ、0°)における角度θと位相速度との関係を示すグラフである。ここで、規格化基板厚みt/λを0.2〜2.0まで6段階に設定し、それぞれのt/λにおける位相速度を示す。
【0095】
図10に示すように、規格化基板厚みt/λ=2.0の場合を除いた全ての場合において、角度θが30度〜50度の範囲で、5000m/s以上の位相速度を得ることができる。
【0096】
図11は、規格化基板厚みt/λと位相速度との関係を示すグラフである。オイラー角(0°、θ、0°)における角度θを30度〜50度まで5段階に設定し、それぞれの角度θにおける位相速度を示している。
【0097】
図11に示すように、各角度θにおいて位相速度のばらつきは小さく、規格化基板厚みt/λが0.2〜2の大部分の範囲で5000m/s以上の位相速度を得ることができる。
【0098】
次に、オイラー角(0°、θ、0°)の角度θ、規格化基板厚みt/λと、位相速度、周波数温度変動量、電気機械結合係数K2の相互の関係について説明する。
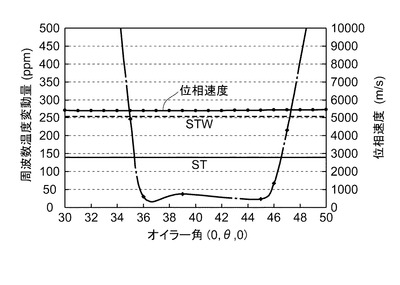
図12は、角度θと位相速度と周波数温度変動量との関係を示すグラフである。なお、規格化基板厚みt/λを1.7としている。
【0099】
図12に示すように、周波数温度変動量がSTWカット水晶よりも小さいθの範囲は、35度≦θ≦47.2度であり(図8も参照する)、この範囲において位相速度5000m/s以上が得られることを示している。
【0100】
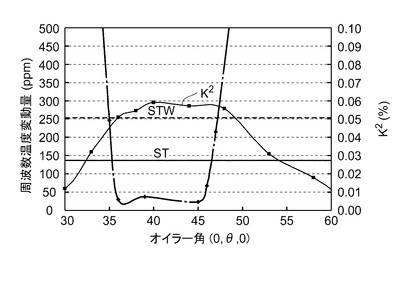
図13は、角度θと電気機械結合係数K2と周波数温度変動量との関係を示すグラフである。図13に示すように、周波数温度変動量がSTWカット水晶よりも小さい角度θの範囲は、35度≦θ≦47.2度である(図9も参照する)。
【0101】
この範囲において電気機械結合係数K2は、基準としている0.02を大きく上回っている。角度θの範囲が32.5度≦θ≦47.2度の場合は、電気機械結合係数K2が0.03以上となり、角度θの範囲が34.2度≦θ≦47.2度の場合は、電気機械結合係数K2が0.04以上となり、さらに、角度θの範囲が36度≦θ≦47.2度の場合は、電気機械結合係数K2が0.05以上となる。
【0102】
なお、図10及び図12,13では、オイラー角(φ、θ、ψ)において、φ=0度、ψ=0度でθを変化させたときの各特性の関係について示しているが、−1度≦φ≦+1度、−5度≦ψ≦+5度の範囲においてほぼ同等の関係が得られることが確認できている。
【0103】
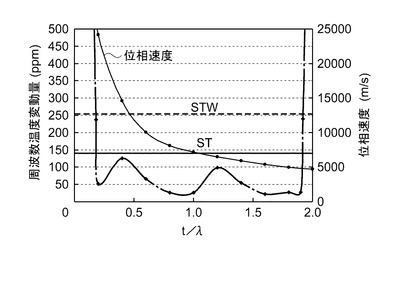
図14は、規格化基板厚みt/λと位相速度と周波数温度変動量との関係を示すグラフである。図14に示すように、周波数温度変動量がSTWカット水晶よりも小さいt/λの範囲は、0.176≦t/λ≦1.925であり、この範囲において位相速度は大部分の範囲で5000m/s以上が得られる。この規格化基板厚みt/λの範囲では、規格化基板厚みt/λが小さいほど位相速度が速くなり、高周波帯域が得られる。つまり、規格化基板厚みt/λを調整すれば位相速度を調整することが可能である。
【0104】
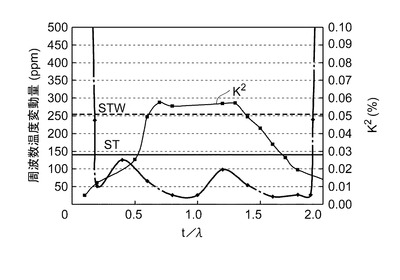
図15は、規格化基板厚みt/λと電気機械結合係数K2と周波数温度変動量との関係を示すグラフである。図15に示すように、周波数温度変動量がSTWカット水晶よりも小さい規格化基板厚みt/λの範囲は、0.176≦t/λ≦1.925であり、この範囲において電気機械結合係数K2は大部分の範囲で0.02以上が得られる。この規格化基板厚みt/λが1に近い範囲では、電気機械結合係数K2が0.05以上の高い領域が得られる。
【0105】
なお、本実施形態では、圧電基板として水晶基板を用いた場合を例示して説明したが、水晶以外の圧電材料を基板として用いることが可能である。例えば、タンタル酸リチウム、ニオブ酸リチウム、四硼酸リチウム、ランガサイト、ニオブ酸カリウムを採用できる。また、酸化亜鉛、窒化アルミ、五酸化タンタル等の圧電性薄膜、硫化カドミウム、硫化亜鉛、ガリウム砒素、インジウムアンチモン等の圧電半導体にも応用可能である。
【0106】
しかしながら水晶基板と他の圧電基板とは共振特性、特に温度特性に大きな差がでることから、圧電基板として水晶基板を用いることにより、温度に対する周波数の変化量を小さく抑えることができ、良好な周波数温度特性を得ることができる。このように、圧電基板に水晶基板を用い、前述した最適電極設計条件とすることで周波数温度特性に優れ、高Q値、低CI値のラム波型共振子を提供することができる。
【0107】
また、本実施形態では、IDT電極20及び反射器25,26にはAl電極を用いていたが、これら電極にはAlを主成分とする合金を用いても構わない。例えば、Au、Ag、Cu、Si、Ti、Pdなどを重量比で10%以下含有したAl合金を用いても同様な効果が得られる。
(実施例2)
【0108】
上述した実施例1では、H_IDT/λ、H_g/λ、η_IDT、η_gを適切に設定し、ΔF_IDT/F<ΔF_g/Fの条件を満たす例を示しているが、実施例2では、電極指片の交差領域の密度とギャップ部の密度とを変化させたことに特徴を有する。
【0109】
図示は省略するが、図4を参照して説明する。ここで、IDT電極20のうち、電極指片の交差領域の密度ρ_IDTと、ギャップ部の電極指片の密度ρ_gと、の関係が、ρ_IDT>ρ_gとなるよう電極の材質が選択される。
【0110】
具体的には、交差領域(幅Wiで示す範囲)にのみCu,Ag,Auまたはこれらを主成分とする金属、ギャップ部(距離Wgで示す範囲)にはAlまたはAlを主成分とする金属を用いる。
【0111】
図16は、交差領域にAl,Cu,Ag,Auを、ギャップ部にAlを用いたときの電極線幅比ηと周波数変化(周波数シフトと表す)の関係を示すグラフである。なお、図16では、H_IDT/λ=H_g/λ=0.01の場合を例示している。
【0112】
図16では、交差領域の密度が大きいほど周波数変化が大きいことを示している。つまり、ギャップ部と交差領域との周波数変化量はより大きくなる。このことは、ギャップ部におけるラム波の位相速度は、交差領域の位相速度よりも速くなることを意味する。
【0113】
従って、ρ_IDT>ρ_gとすることで、前述した実施例1と同様に、横方向のエネルギーを閉じ込めることができる。
【0114】
なお、実施例2におけるIDT電極20の形成方法としては、交差領域及びギャップ部及びバスバー電極をAlで形成し、その後、交差領域にCu,Ag,Auのいずれかの電極を形成しても、交差領域にCu,Ag,Auを、ギャップ部にAlを別に形成してもよい。この際、バスバー電極の材質は限定しなくてもよい。
【0115】
また、交差領域の電極幅とギャップ部の電極幅の関係は、ρ_IDT>ρ_gの関係を満足すれば、η_g≦η_IDT、H_g/λ≦H_IDT/λとしてもよい。
(実施例3)
【0116】
続いて、実施例3について図面を参照して説明する。実施例3は、電極指片の交差領域表面に絶縁性膜を付加したことに特徴を有する。
図17は、実施例3に係るラム波型共振子の概略構成を示す平面図である。図17において、電極指片の交差領域(幅Wiで示す領域)の表面には、絶縁性膜30が形成されている。
【0117】
絶縁性膜30としては、SiO2,Si,SiNX,AL2O3、ZnO,Ta2O5等を採用することができる。SiO2膜は、温度特性の補正膜として使われることが多く、温度特性改善効果があり、より好ましい。
また、絶縁性膜30は、交差領域の電極指片の表面にのみ形成してもよく、ゴミなどの異物による電極間の短絡不具合を解決することができる。
【0118】
このように、交差領域に上述の絶縁性膜30を装荷することにより、交差領域の質量付加効果をギャップ部の質量付加効果よりも大きくすることで、IDT電極20の全体に同じ電極材料を用いた場合においても、ρ_IDT>ρ_gとしたとき(実施例2)と同様な効果が得られる。
【0119】
なお、交差領域の電極幅とギャップ部の電極幅の関係は、絶縁性膜30を装荷すればη_g≦η_IDT、H_g/λ≦H_IDT/λとしてもよい。
【0120】
さらに、交差領域の電極指片にのみ陽極酸化させても、密度が高い金属を用いた場合と同じ効果が得られる。
(発振器)
【0121】
続いて、発振器について説明する。
発振器は、前述したラム波型共振子と、このラム波型共振子を励振するための発振回路(図示せず)を有して構成される。ラム波型共振しとしては、前述した実施例1〜実施例3に示した条件範囲のものが使用される。
【0122】
ここで、最適設計条件の範囲である各実施例において、互いに交差する電極指片の交差幅Wiは、20λ〜40λである。このような最適電極設計条件にした場合のラム波型共振子は高いQ値、低いCI値を実現できる。しかしながら、発振器に用いる場合、発振回路と組み合わせたときの発振条件を満たさなければ発振器に適用できない。
【0123】
ラム波型共振子を発振させるには、ラム波型共振子で決まる共振周波数近傍で誘導性になっていなければ発振しない。共振周波数近傍で誘導性とするには、電極指片が間挿されたときに互いに交差する交差幅Wiが影響する。
【0124】
図18は、共振周波数近傍のアドミッタンス円線図の測定結果を示している。図18において、Wiが15λ以下の場合は、アドミッタンスBがB>0となり容量性であるために発振できない。
【0125】
また、電極指片の交差幅Wiが20λ以上であればアドミッタンスBがB<0となり誘導性であるために、ラム波型共振子と発振回路とを組んだときに発振させることが可能になる。
【0126】
従って、上記から電極指片が間挿されたときに互いに交差する交差幅Wiが20λ以上であるラム波型共振子を用いることにより、良好な発振特性を有する発振器を実現できる。
【符号の説明】
【0127】
1…ラム波型共振子、10…水晶基板、20…IDT電極、21a,21b,21c,22a,22b…電極指片、21d,22c…バスバー電極、25,26…反射器。
【技術分野】
【0001】
本発明は、ラム波型共振子と、このラム波型共振子を備える発振器に関する。
【背景技術】
【0002】
ラム波とは、伝搬させる波の数波長以下に基板厚さを薄くすることで、基板内部を伝搬するバルク波が基板の上下面での反射を繰り返し伝搬する板波である。基板表面から深さ1波長以内にエネルギーの90%を有するレイリー波、漏洩弾性表面波、擬似縦波型漏洩弾性表面波の表面波とは異なり、ラム波は基板内部を伝搬するバルク波であるためエネルギーは基板全体に分布している。
【0003】
非特許文献1によると、板波とレイリー波は学術的にも区別されている。また、非特許文献2にはレイリー波、漏洩弾性表面波の解析方法、非特許文献3にはラム波の解析方法が示されている。大きな違いは8次方程式の解の選択方法が各々の波で異なり、レイリー波とラム波は全く別の波であって性質が異なる。従って、ラム波はレイリー波と同様の設計条件では良好な特性が得られないため、ラム波を対象とした設計方法が必要である。
【0004】
ラム波の特徴として、特許文献1に示されている分散曲線にあるように、ラム波の伝搬可能なモードは、基板厚み方向の波数が共振条件を満たすモードであり、ラム波には高次を含め多数のモードが存在する。
【0005】
存在するモードの位相速度はレイリー波以上であり、縦波以上の位相速度をもったモードも多数存在しているため、位相速度が高いモードほど上記の表面波と同じ電極指幅でも容易に高周波化が可能となる。また、厚さが5波長以下のATカット水晶基板を用いることにより、温度特性が優れ、高周波化に適したラム波を利用できる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−258596号公報
【特許文献2】特開2008−54163号公報
【非特許文献】
【0007】
【非特許文献1】超音波便覧、超音波便覧編集委員会編集、丸善株式会社出版。1999年発行 第62頁〜第71頁
【非特許文献2】弾性波素子技術ハンドブック、学振150委編集、オーム社出版。1991年発行 第148頁〜第158頁
【非特許文献3】中川恭彦、重田光善、柴田和匡、垣尾省司著、ラム波型弾性波素子用基板の温度特性、電子情報通信学会論文誌 C NO.1。第34頁〜第39頁
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述した特許文献1によれば、電極として重い金属を用いており、そのことによりラム波の反射係数を高め、少ない反射器本数でエネルギーを閉じ込められるため小型化が可能と記載されている。これは縦方向(ラム波の伝搬方向)の振動漏れを抑えることによりエネルギーを閉じ込めることを意味している。しかし、横方向(ラム波の伝搬方向に対し垂直方向のこと)のエネルギー閉じ込めについては考慮されていないため、必ずしも最適電極設計であるとは言い難い。また、特許文献2においても、横方向のエネルギー閉じ込めを高めるための具体的な手段は開示されていない。
【0009】
もし、横方向(ラム波の伝搬方向に対して垂直方向)に振動漏れが生じていると、ラム波の良好な特性を生かしきれず、共振特性を評価するうえで重要なファクターであるQ値の低下、CI値の増加を招くことが考えられる。その結果、発振器に適用した場合に十分な特性が得られず、消費電力の増加や発振が停止するといった深刻な問題が生じる。
また、横方向の振動漏れが圧電基板の横方向外端部に至ると、圧電基板外端部からの反射波によりスプリアスが生じてしまう。
【課題を解決するための手段】
【0010】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0011】
[適用例1]本適用例に係るラム波型共振子は、複数の電極指片の一方の端部を接続するバスバー電極を有し、前記複数の電極指片の先端部を互いに間挿してなるIDT電極と、前記IDT電極のラム波の伝搬方向両側に配設される一対の反射器と、が圧電基板の一方の主面に設けられ、ラム波の波長をλとしたとき、前記圧電基板の厚さtが、0<t/λ≦3であり、前記IDT電極の電極指線幅をλ/2で除した値を線幅比とし、前記電極指片の交差領域の線幅比をη_IDT、波長λで規格化した規格化電極膜厚をH_IDT/λ、前記交差領域のラム波の伝搬方向に対して垂直方向端部と前記バスバー電極との間の領域であるギャップ部の電極指片の線幅比をη_g、波長λで規格化した規格化電極膜厚をH_g/λ、としたとき、η_IDT=η_g=0のときの周波数Fを基準とした場合の前記交差領域での周波数変化ΔF_IDT/Fと、前記ギャップ部での周波数変化ΔF_g/Fと、の関係が、ΔF_IDT/F<ΔF_g/F、を満たすように、H_IDT/λ、H_g/λ、η_IDT、η_gのそれぞれが設定されていることを特徴とする。
【0012】
詳しくは、後述する実施形態で説明するが、ラム波の位相速度は、規格化基板厚み(t/λ)に依存する性質があり、規格化基板厚みを薄くすると位相速度が高くなる。
【0013】
このラム波型共振子には、複数のモードが存在し、規格化基板厚みt/λが大きくなるに従い、各モードにおける位相速度が3000(m/s)〜6000(m/s)の範囲で集約されており、特に5000(m/s)〜6000(m/s)の範囲では密集している。
【0014】
このようにモードが密集している場合には、モード結合が起こりやすく、所望のモードが得られないこと、または、位相速度が変動しやすいことが考えられる。そこで、規格化基板厚みをt/λ≦3に設定することで、モード結合のしやすい範囲を回避することができる。
【0015】
また、η_IDT=η_g=0のときの周波数Fを基準とした場合の交差領域での周波数変化ΔF_IDT/Fと、ギャップ部での周波数変化ΔF_g/Fと、の関係を、ΔF_IDT/F<ΔF_g/Fとしている。つまり、ギャップ部のラム波の位相速度は交差領域のラム波の位相速度よりも速くなる。このことにより、ラム波の伝搬方向に対して垂直な横方向の変位がギャップ部より外側において収束し、振動漏れがほとんどない状態、つまり、エネルギーが閉じ込められている状態を得ることができる。
【0016】
このように、横方向の振動漏れを抑制することにより、圧電基板の横方向外端部で発生する反射波の振幅を格段に小さくすることができ、圧電基板の横方向外端部からの反射波によるスプリアスを低減することができる。
【0017】
さらに、圧電基板の横方向外端部からの反射波によるスプリアスを低減することにより、ラム波型共振子の共振特性を評価する上で重要なファクターであるQ値の低下やCI値の増加を抑制する。従って、高いQ値はラム波型共振子の発振を安定維持することができ、低いCI値は消費電力の減少を実現できる。
【0018】
[適用例2]上記適用例に係るラム波型共振子において、前記圧電基板は、オイラー角(φ、θ、ψ)が、−1度≦φ≦+1度、35.0度≦θ≦47.2度、−5度≦ψ≦+5度の範囲であって、且つ厚さtとラム波の波長λとの関係が、0.176≦t/λ≦1.925を満たす水晶基板であることが好ましい。
【0019】
ラム波型共振子の周波数温度特性、周波数帯域、励振の安定性は、水晶基板の切り出し角度と弾性波の伝搬方向によって律せられる。つまり、オイラー角(0°、θ、0°)における角度θと、基板厚みtと波長λとの関係で表される規格化基板厚みt/λにて律せられる。
【0020】
角度φと、角度θと、角度ψと、規格化基板厚みt/λと、を上述したような関係式とすることで、STWカット水晶、またはSTカット水晶に比べ優れた周波数温度特性と、高周波帯域への対応が可能となる。
【0021】
また、水晶基板の励振の効率を表す電気機械結合係数(K2)を高めることができるので、励振し易く、安定した周波数温度特性をもつラム波型共振子を提供することができる。
【0022】
[適用例3]上記適用例に係るラム波型共振子において、前記複数の電極指片の交差幅が20λ以上であることが好ましい。
【0023】
このラム波型共振子は、発振器への応用を考えた場合、発振回路と組み合わせたときの発振条件を満たさなければ発振器に適用できない。しかし、実施の形態で後述する共振周波数近傍のアドミッタンス円線図の測定結果によれば、交差幅が20λ以上であればアドミッタンスBが、B<0となり誘導性であるために、ラム波型共振子と発振回路とを組んだ場合に安定して発振させることができる。
【0024】
[適用例4]上記適用例に係るラム波型共振子において、前記電極指片の交差領域の密度ρ_IDTと、前記ギャップ部の電極指片の密度ρ_gと、の関係が、ρ_IDT>ρ_gであることが好ましい。
【0025】
なお、IDT電極の材質としては、例えば、ギャップ部をAlまたはAlを主成分とする金属、交差領域をCu,Ag,Auまたはこれらを主成分とする金属とすることができる。
【0026】
本適用例によれば、上述したH_IDT/λ、H_g/λ、η_IDT、η_gを適切に設定した場合と同様に、ΔF_IDT/F<ΔF_g/Fの条件を満たすことが可能で、ラム波の伝搬方向に対して垂直な横方向の変位がギャップ部より外側において収束し、振動漏れがほとんどない状態、つまり、エネルギーが閉じ込められている状態を得ることができる。
【0027】
[適用例5]上記適用例に係るラム波型共振子において、前記電極指片の交差領域の表面に、絶縁性を有する膜が設けられていることが好ましい。
【0028】
ここで、絶縁性を有する膜としては、例えば、SiO2、Si、SiXNY、Al2O3、ZnO、Ta2O5等を採用できる。
【0029】
本適用例によれば、電極指片の交差領域の表面に絶縁性を有する膜を設けることにより、交差部とギャップ部の電極指片の質量付加効果が変わる。このことにより、電極指片の交差領域とギャップ部とに互いに密度が異なる金属を用いる場合と同様に、ΔF_IDT/F<ΔF_g/Fの条件を満たすことが可能で、ラム波の伝搬方向に対して垂直な横方向の変位がギャップ部より外側において収束し、振動漏れがほとんどない状態、つまり、エネルギーが閉じ込められている状態を得ることができる。
【0030】
[適用例6]本適用例に係る発振器は、上記適用例のいずれかに記載のラム波型共振子と、前記ラム波型共振子を励振するための発振回路と、が備えられていることを特徴とする。
【0031】
本適用例によれば、圧電基板として水晶基板を用いると共に、上述した最適基板厚さ及び最適なIDT電極の構成を有するラム波型共振子を用いることで、横方向の振動漏れを抑制して高Q値、低CI値、及び周波数温度特性に優れた発振器を提供することができる。
【図面の簡単な説明】
【0032】
【図1】実施形態1に係る水晶基板の切り出し方位とラム波伝搬方向を示す説明図。
【図2】実施形態1に係るラム波型共振子の基本形状を示し、(a)は概略構造を示す斜視図、(b)は、(a)のA−A切断面を示す断面図。
【図3】規格化基板厚みt/λと位相速度との関係を示すグラフ。
【図4】ラム波型共振子の1例を示し、(a)は主面方から視認した平面図、(b)は(a)のB−B切断面を示す断面図。
【図5】電極線幅比ηと、電極指片の各部位の規格化基板厚さと、周波数シフト(ppm)との関係を表すグラフ。
【図6】電極指片の交差領域の線幅比η_IDT=0.5とした場合に、ギャップ部の線幅比η_gを変化したときのQ値の変化を表すグラフ。
【図7】電極指片の交差領域の線幅比η_IDT=0.8とした場合に、ギャップ部の線幅比η_gを変化したときのQ値の変化を表すグラフ。
【図8】周波数温度変動量(ppm)とオイラー角(0°、θ、0°)における角度θの関係を示すグラフ。
【図9】周波数温度変動量(ppm)と規格化基板厚みt/λとの関係を示すグラフ。
【図10】オイラー角(0°、θ、0°)における角度θと位相速度との関係を示すグラフ。
【図11】規格化基板厚みt/λと位相速度との関係を示すグラフ。
【図12】角度θと位相速度と周波数温度変動量との関係を示すグラフ。
【図13】角度θと電気機械結合係数K2と周波数温度変動量との関係を示すグラフ。
【図14】規格化基板厚みt/λと位相速度と周波数温度変動量との関係を示すグラフ。
【図15】規格化基板厚みt/λと電気機械結合係数K2と周波数温度変動量との関係を示すグラフ。
【図16】交差領域にAl,Cu,Ag,Auを、ギャップ部にAlを用いたときの電極線幅比ηと周波数変化(周波数シフトと表す)の関係を示すグラフ。
【図17】実施例3に係るラム波型共振子の概略構成を示す平面図。
【図18】共振周波数近傍のアドミッタンス円線図。
【発明を実施するための形態】
【0033】
以下、本発明の実施形態を図面に基づいて説明する。
なお、以下の説明で参照する図は、図示の便宜上、部材ないし部分の縦横の縮尺は実際のものとは異なる模式図である。
(実施形態1)
【0034】
図1は、本実施形態に係る水晶基板の切り出し方位とラム波伝搬方向を示す説明図、即ちオイラー角(φ,θ,ψ)の説明図である。圧電基板としての水晶基板10の切り出し方位は、電気軸と呼ばれるX軸、機械軸と呼ばれるY軸、光学軸と呼ばれるZ軸によって定義される。
【0035】
オイラー角(0°,0°,0°)で表される水晶基板10は、Z軸に垂直な主面を有するZカット基板となる。ここで、オイラー角のφはZカット基板の第1の回転に関するものであり、Z軸を回転軸とし、+X軸から+Y軸側へ回転する方向を正の回転角度とした第1回転角度である。
【0036】
オイラー角のθはZカット基板の第1の回転後に行う第2の回転に関するものであり、第1の回転後のX軸を回転軸とし、第1の回転後の+Y軸から+Z軸へ回転する方向を正の回転角度とした第2回転角度である。水晶基板10のカット面は、第1回転角度φと第2回転角度θとで決定される。
【0037】
オイラー角のψはZカット基板の第2の回転後に行う第3の回転に関するものであり、第2の回転後のZ軸を回転軸とし、第2の回転後の+X軸から第2の回転後の+Y軸側へ回転する方向を正の回転角度とした第3回転角度である。ラム波の伝搬方向は第2の回転後のX軸に対する第3回転角度ψで表される。
【0038】
図2は、実施形態1に係るラム波型共振子の基本形状を示し、(a)は概略構造を示す斜視図、(b)は、(a)のA−A切断面を示す断面図である。本実施形態における水晶基板10の切り出し方位は、厚み方向のZ軸をZ’まで角度θだけ回転させた回転Yカット水晶であり、図中、長手方向がX軸、幅方向がY’、厚み方向がZ’となるように切り出されている(図1、参照)。
【0039】
図2(a),(b)において、このラム波型共振子1は、水晶基板10と、水晶基板10の一方の主面のX軸方向に形成される櫛歯形状のIDT電極(Interdigital Transducer)20と、IDT電極20のラム波の伝搬方向両側に設けられる一対の反射器25,26と、から構成されている。従って、ラム波の伝搬方向はX軸方向となる。
【0040】
また、水晶基板10の厚さをt、伝搬されるラム波の波長をλとしたときに、規格化基板厚みt/λは、0<t/λ≦3で表される範囲に設定されている。
【0041】
IDT電極20はAl電極からなり、入力IDT電極21とGND(グランド)IDT電極22とから構成されている。GND(グランド)IDT電極22は、必ずしも接地する必要はなく、信号線に接続することも可能である。入力IDT電極21は、複数の電極指片21a,21b,21cが平行で同じ長さで形成され、これら複数の電極指片の一方の端部はバスバー電極21dで接続されている。GNDIDT電極22は、複数の電極指片22a,22bが平行で同じ長さに形成され、これら複数の電極指片の一方の端部はバスバー電極22cで接続されている。
【0042】
入力IDT電極21と、GNDIDT電極22とは互いの電極指片の先端部が間挿されている。電極指片21a,21b,21cの先端部は、バスバー電極22cと間隙を有して配設される。また、電極指片22a,22bの先端部はバスバー電極21dと間隙を有して配設される。
【0043】
なお、入力IDT電極21の電極指片21a,21b,21cと、GNDIDT電極22の電極指片22a,22bと、が間挿されたときに互いの電極指片が交差する幅を交差幅と表す。
【0044】
なお、図2に記載のIDT電極20の電極指片及び反射器25,26の電極指片の数は簡略化しており、実際にはそれぞれ数十本から数百本設けられる。
【0045】
水晶基板10は、電気軸と呼ばれるX軸、機械軸と呼ばれるY軸、光学軸と呼ばれるZ軸の面で構成される薄板である。しかし、本実施形態における水晶基板10の切り出し方位は、厚み方向のZ軸をZ’まで角度θだけ回転させた回転Yカット水晶であり、図2では、水晶基板10の図示の軸方向を表している。従って、厚さ方向をZ、ラム波の伝搬方向をX、ラム波の伝搬方向に対して垂直方向をYで表している。なお、X方向を縦方向、Y方向を横方向と表すことがある。
【0046】
本実施形態では、電極指片21a,21b,21cのピッチ、電極指片22a,22bのピッチをλ(ラム波の波長)とし、各電極指片の幅及び各電極指片間の距離を(1/4)λとしている。
【0047】
ラム波型共振子1は、入力IDT電極21に所定の周波数で入力される駆動信号によって水晶基板10が励振されるが、この励振された弾性波は、水晶基板のX方向に向かって水晶基板10の表裏の面内を反射しながら伝搬していく。このように伝搬される弾性波をラム波と呼称している。
【0048】
IDT電極20の構造はSAW共振子と似ているが、用いている波の種類が異なるため特性も異なり、設計条件も当然異なる。そして、IDT電極20から伝搬されるラム波は反射器25,26によって反射される。
【0049】
従って、電極指片21aのラム波の伝搬方向中心から反射器25の最も電極指片21a寄りのラム波の伝搬方向中心までの距離D1、同様に電極指片21cとの距離D2は、(1/2)nλ(nは整数)に設定され、反射波が、所定の周波数で、駆動信号と位相が一致するように設定されている。
なお、電極指片21aと反射器25との距離、電極指片21cと反射器26との距離は(1/2)λ以外であってもよい。
【0050】
続いて、規格化基板厚みt/λと位相速度との関係について図面を参照して説明する。
図3は、規格化基板厚みt/λと位相速度との関係を示すグラフである。横軸には規格化基板厚みt/λ、縦軸には位相速度(m/s)を示している。また、圧電基板として水晶基板10を用いたときのラム波型共振子を例示している。
【0051】
図3によれば、このラム波型共振子1には、複数のモードが存在していることが示され、規格化基板厚みt/λが大きくなるに従い、各モードにおける位相速度が3000(m/s)〜6000(m/s)の範囲で集約されており、特に5000(m/s)〜6000(m/s)の範囲では密集している。
【0052】
このようにモードが密集している場合には、モード結合が起こりやすく、所望のモードが得られないこと、または、位相速度が変動しやすいことが考えられる。そこで、規格化基板厚みをt/λ≦3に設定することで、モード結合のしやすい範囲を回避することができる。
【0053】
また、図3によれば、規格化基板厚みt/λが小さいほど位相速度が高まる傾向が示され、規格化基板厚みがt/λ≦3においては、位相速度が6000(m/s)以上のモードが多数存在している。位相速度は周波数と波長の積によって表されるため、このラム波型共振子が高周波に対応可能であることを示している。
【0054】
ラム波型共振子に関して、基礎特性に関する文献はあるが、横方向(Y方向)のエネルギー閉じ込めに関する文献は見当たらず、最適設計条件は不明確であった。そこで、ラム波の横方向のエネルギー閉じ込めに関して詳細に調査を進めてきた。
【0055】
その結果、ラム波は水晶SAWと比較して横方向に振動漏れが発生しやすく、電極指片の交差幅WiとギャップWgの設計条件に敏感であり、横方向のエネルギーを閉じ込めるためには、交差幅Wiの範囲の位相速度をギャップWgの範囲の位相速度よりも遅くすることが有効であることが分かった。
【0056】
次に、ラム波の横(Y)方向の変位を支配する微分方程式について述べる。この微分方程式はラム波型共振子の振動エネルギーを長さと深さ方向に積分して得られるラグランジアンL=T−U(Tは運動エネルギー、Uは位置エネルギー)から得られるもので次式で表される。
【0057】
【数1】
【0058】
ただし、U(Y)は幅方向変位、Yはラム波の波長λで規格化したy座標(y/λ)、a定数は横方向の剪断効果係数、ωは角周波数、ω0は電極指片の交差幅が無限大のラム波型共振子が有する角周波数である。a定数は解析結果、もしくは測定結果から得られるものであり、本実施形態では0.021であった。この微分方程式に基づきラム波型共振子の横方向の変位を計算した。
続いて、具体的な実施例について図面を参照して説明する。
(実施例1)
【0059】
図4は、ラム波型共振子の1例を示し、(a)は主面方から視認した平面図、(b)は(a)のB−B切断面を示す断面図である。まず、本実施例にて提案する最適電極設計パラメーターについて説明する。
【0060】
図4(a)において、電極指片21a,21b,21cと電極指片22a,22bとが間挿されたときに互いに交差する交差領域の電極指片21a〜21c,22a,22bの電極指線幅Lt(以降、単に線幅と表すことがある)は、ギャップ部の電極指線幅Lgよりも広く形成されている。
【0061】
ここで、IDT電極20の電極指線幅をλ/2で除した値を線幅比とし、各電極指片の交差領域の線幅比をη_IDT、交差領域のラム波の伝搬方向(X方向)に対して垂直方向(Y方向)端部とバスバー電極21d,22cとの間の領域(以降、ギャップ部と表す)の電極指片の線幅比をη_gとし、電極指片21a,21b,21c、電極指片22a,22bそれぞれのピッチを波長λとする。従って、電極指片21aと電極指片22aとのピッチは1/2λである。
【0062】
また、電極指片の交差領域の幅をWi,ギャップ部の幅(距離)をWg,バスバー電極の幅をWbで表す。
【0063】
なお、反射器25,26、及びIDT電極20の関係は、前述した図2と同様に設定されるので説明を省略する。また、水晶基板10の規格化基板厚みt/λは、0<t/λ≦3の範囲に設定されている。
【0064】
次に、ラム波型共振子1の断面構成について図4(b)を参照して説明する。電極指片の交差領域(交差幅Wiの範囲)の厚さをH_IDT、ギャップ部(距離Wgの範囲)の厚さをH_g、波長λで規格化した規格化電極膜厚H_IDT/λ、バスバー電極(幅Wbの範囲)の厚さをH_bとし、波長λで規格化した規格化電極膜厚H_g/λとする。なお、ギャップ部の厚さとバスバー電極の厚さをH_g=H_bとしている。
【0065】
続いて、電極線幅比ηと周波数変化(周波数シフトと表すことがある)の関係について説明する。ここで、η_IDT=η_g=0の場合の周波数を基準とし、交差領域の周波数をF_IDT、ギャップ部の周波数をF_g、それぞれの周波数シフトをΔF_IDT/F、ΔF_g/Fで表し、以下の計算式を用いて周波数シフトについて解析する。まず、交差領域の周波数シフトΔF_IDT/Fを求める計算式を[数2]に示す。
【0066】
また、本実施例では、オイラー角(0°,42°,0°)、規格化基板厚さt/λ=1.6として計算した。
【0067】
【数2】
【0068】
次に、電極線幅比η≦1.0の場合のギャップ部の周波数シフトΔF_g/Fを求める計算式を[数3]に示す。
【0069】
【数3】
【0070】
次に、電極線幅比η>1.0のギャップ部の周波数シフトΔF_g/Fを求める計算式を[数4]に示す。
【0071】
【数4】
【0072】
続いて、上述の各数式により求めた解析結果について説明する。
図5は、電極線幅比ηと、電極指片の各部位の規格化基板厚さと、周波数シフト(ppm)との関係を表すグラフである。横軸に電極線幅比η、縦軸の周波数シフトを表し、H_IDT/λ=0.01〜0.05の範囲(図中、実線で表す)、H_g/λ=0.01〜0.05の範囲(図中、破線で表す)における周波数シフトの解析結果を示している。
【0073】
図5において線幅比ηが0.3以上であり、且つ、電極指片の交差領域の電極厚さH_IDTをラム波の波長λで除した規格化電極厚さH_IDT/λが、ギャップ部の電極厚さH_g(規格化基板厚さH_g/λで表す)よりも厚い場合には、ΔF_IDT/F<ΔF_g/Fの関係となる。つまり、ギャップ部の周波数(ラム波の位相速度)は、交差領域の周波数(ラム波の位相速度)よりも高くなる。
【0074】
このようにギャップ部の周波数(ラム波の位相速度)を交差領域の周波数(ラム波の位相速度)よりも高くすることにより、ギャップ部の領域から横方向のエネルギーを閉じ込めることができる。従って、ΔF_IDT/F<ΔF_g/Fの関係を満たすH_IDT/λ、H_g/λ、η_IDT、η_gを適切に設定することで、横方向のエネルギーを閉じ込めることができる。
【0075】
なお、IDT電極20及び反射器25,26は、フォトリソ工程により形成される。フォトリソ工程においては、各電極の断線、パターン抜け、ショート等を防止するため、電極幅、電極厚さを設定することが望まれる。従って、0.01≦H_IDT/λ≦0.05、0.01≦H_g/λ≦0.05、0.1≦η_IDT≦0.9、0.1≦η_g≦0.9の範囲に設定されることがより好ましい。
【0076】
次に、ラム波型共振子の共振特性を評価するうえで重要なファクターであるQ値について説明する。
図6は、電極指片の交差領域の線幅比η_IDT=0.5とした場合に、ギャップ部の線幅比η_gを変化したときのQ値の変化を表すグラフである。
【0077】
図5から、η_IDTを0.5と一定にした場合、η_gが0.612を境界点として周波数の大小が逆転する。このことから、図6において、η_g<0.612の範囲では、ΔF_IDT/F<ΔF_g/FとなるためQ値の劣化はないが、η_g>0.612ではΔF_IDT/F>ΔF_g/Fと逆転するためQ値は劣化している。
【0078】
図7は、電極指片の交差領域の線幅比η_IDT=0.8とした場合に、ギャップ部の線幅比η_gを変化したときのQ値の変化を表すグラフである。図5において、η_IDT=0.8では、η_gが1.514を境界点として周波数の大小関係が逆転する。
【0079】
しかし、η_g<1.514の範囲ではΔF_IDT/F<ΔF_g/FであるためQ値の劣化は少ないはずだが、図7では、Q値が劣化している。これは、ΔF_IDT/FとΔF_g/Fの周波数差ΔFの大小が関係していることによる。
【0080】
例えば、η_g=0.25ではΔF=2817ppmに対し、η_g=1.5ではΔF=31ppmと非常に小さい。従って、ΔF_IDT/F<ΔFg/FにおいてもΔFが大きい方が、エネルギーの閉じ込めはより強く、高Q値、低CI(Crystal Impedance)値を実現できることを示している。
【0081】
なお、図6において、η_gに対するQ値の変化を示す各点(P1〜P4)のうち、点P1のときのΔFは、ΔF=684ppmである。
【0082】
また、図7において、η_gに対するQ値の変化を示す各点(P1〜P5)のうち、点P3のときのΔFは、ΔF=1599ppmである。
【0083】
図6,7から、ΔF_IDT/F<ΔFg/Fであって、ΔF_IDT/FとΔFg/Fとの差は684ppm以上とすることがより好ましい。
なお、本実施形態ではオイラー角(0°,42°,0°)の水晶基板を用いたが、必ずしもこれには限定されず、水晶基板のオイラー角(φ、θ、ψ)を、−1度≦φ≦+1度、35.0度≦θ≦47.2度、−5度≦ψ≦+5度の範囲で選択すれば、同様の効果を奏する。
【0084】
以上説明した本実施例によれば、ラム波の位相速度は、水晶基板10の規格化基板厚み(t/λ)に依存する性質があり、規格化基板厚みを薄くすると位相速度が高くなる。
【0085】
このラム波型共振子には、複数のモードが存在し、規格化基板厚みt/λが大きくなるに従い、各モードにおける位相速度が3000(m/s)〜6000(m/s)の範囲で集約されており、特に5000(m/s)〜6000(m/s)の範囲では密集している。
【0086】
このようにモードが密集している場合には、モード結合が起こりやすく、所望のモードが得られないこと、または、位相速度が変動しやすいことが考えられる。そこで、水晶基板10の規格化基板厚みを0<t/λ≦3に設定することで、モード結合のしやすい範囲を回避することができる。
【0087】
また、η_IDT=η_g=0のときの周波数Fを基準とした場合の交差領域での周波数変化ΔF_IDT/Fと、ギャップ部での周波数変化ΔF_g/Fと、の関係を、ΔF_IDT/F<ΔF_g/Fとしている。つまり、ギャップ部のラム波の位相速度は交差領域のラム波の位相速度よりも速くなる。このことにより、ラム波の伝搬方向に対して垂直な横方向の変位がギャップ部より外側において収束し、振動漏れがほとんどない状態、つまり、エネルギーが閉じ込められている状態を得ることができる。
【0088】
このように、横方向の振動漏れを抑制することにより、水晶基板10の横方向外端部で発生する反射波の振幅を格段に小さくすることができ、水晶基板10の横方向外端部からの反射波によるスプリアスを低減することができる。
【0089】
さらに、水晶基板10の横方向外端部からの反射波によるスプリアスを低減することにより、ラム波型共振子の共振特性を評価する上で重要なファクターであるQ値の低下やCI値の増加を抑制する。従って、高いQ値はラム波型共振子の発振を安定維持することができ、低いCI値は消費電力の減少を実現できる。
【0090】
続いて、前述したラム波型共振子1(図2,3、参照)における位相速度と規格化基板厚みt/λ及びオイラー角(0°,θ,0°)における角度θそれぞれに対する周波数温度偏差(周波数温度変動量)、位相速度、電気機械結合係数K2の関係についてシミュレーションにより算出した結果について図面を参照して説明する。
【0091】
図8は、周波数温度変動量(ppm)とオイラー角(0°、θ、0°)における角度θの関係を示すグラフである。図8において、ラム波型共振子1は、角度θが35.0度≦θ≦47.2度の範囲において、STWカット水晶よりも周波数温度特性がよいことを示している。
【0092】
なお、オイラー角の角度θは、36度≦θ≦45度にすることがより望ましい。この角度θの領域では、周波数温度変動量がほぼフラットとなりSTカット水晶よりも周波数温度特性が優れる。
【0093】
図9は、周波数温度変動量(ppm)と規格化基板厚みt/λとの関係を示すグラフである。図9に示すように、規格化基板厚みt/λが、0.176≦t/λ≦1.925の範囲において、STWカット水晶及びSTカット水晶よりも優れた周波数温度特性を有する。
【0094】
次に、角度θ及び規格化基板厚みt/λと位相速度、周波数温度変動量、電気機械結合係数K2相互の関係について詳しく説明する。
図10は、オイラー角(0°、θ、0°)における角度θと位相速度との関係を示すグラフである。ここで、規格化基板厚みt/λを0.2〜2.0まで6段階に設定し、それぞれのt/λにおける位相速度を示す。
【0095】
図10に示すように、規格化基板厚みt/λ=2.0の場合を除いた全ての場合において、角度θが30度〜50度の範囲で、5000m/s以上の位相速度を得ることができる。
【0096】
図11は、規格化基板厚みt/λと位相速度との関係を示すグラフである。オイラー角(0°、θ、0°)における角度θを30度〜50度まで5段階に設定し、それぞれの角度θにおける位相速度を示している。
【0097】
図11に示すように、各角度θにおいて位相速度のばらつきは小さく、規格化基板厚みt/λが0.2〜2の大部分の範囲で5000m/s以上の位相速度を得ることができる。
【0098】
次に、オイラー角(0°、θ、0°)の角度θ、規格化基板厚みt/λと、位相速度、周波数温度変動量、電気機械結合係数K2の相互の関係について説明する。
図12は、角度θと位相速度と周波数温度変動量との関係を示すグラフである。なお、規格化基板厚みt/λを1.7としている。
【0099】
図12に示すように、周波数温度変動量がSTWカット水晶よりも小さいθの範囲は、35度≦θ≦47.2度であり(図8も参照する)、この範囲において位相速度5000m/s以上が得られることを示している。
【0100】
図13は、角度θと電気機械結合係数K2と周波数温度変動量との関係を示すグラフである。図13に示すように、周波数温度変動量がSTWカット水晶よりも小さい角度θの範囲は、35度≦θ≦47.2度である(図9も参照する)。
【0101】
この範囲において電気機械結合係数K2は、基準としている0.02を大きく上回っている。角度θの範囲が32.5度≦θ≦47.2度の場合は、電気機械結合係数K2が0.03以上となり、角度θの範囲が34.2度≦θ≦47.2度の場合は、電気機械結合係数K2が0.04以上となり、さらに、角度θの範囲が36度≦θ≦47.2度の場合は、電気機械結合係数K2が0.05以上となる。
【0102】
なお、図10及び図12,13では、オイラー角(φ、θ、ψ)において、φ=0度、ψ=0度でθを変化させたときの各特性の関係について示しているが、−1度≦φ≦+1度、−5度≦ψ≦+5度の範囲においてほぼ同等の関係が得られることが確認できている。
【0103】
図14は、規格化基板厚みt/λと位相速度と周波数温度変動量との関係を示すグラフである。図14に示すように、周波数温度変動量がSTWカット水晶よりも小さいt/λの範囲は、0.176≦t/λ≦1.925であり、この範囲において位相速度は大部分の範囲で5000m/s以上が得られる。この規格化基板厚みt/λの範囲では、規格化基板厚みt/λが小さいほど位相速度が速くなり、高周波帯域が得られる。つまり、規格化基板厚みt/λを調整すれば位相速度を調整することが可能である。
【0104】
図15は、規格化基板厚みt/λと電気機械結合係数K2と周波数温度変動量との関係を示すグラフである。図15に示すように、周波数温度変動量がSTWカット水晶よりも小さい規格化基板厚みt/λの範囲は、0.176≦t/λ≦1.925であり、この範囲において電気機械結合係数K2は大部分の範囲で0.02以上が得られる。この規格化基板厚みt/λが1に近い範囲では、電気機械結合係数K2が0.05以上の高い領域が得られる。
【0105】
なお、本実施形態では、圧電基板として水晶基板を用いた場合を例示して説明したが、水晶以外の圧電材料を基板として用いることが可能である。例えば、タンタル酸リチウム、ニオブ酸リチウム、四硼酸リチウム、ランガサイト、ニオブ酸カリウムを採用できる。また、酸化亜鉛、窒化アルミ、五酸化タンタル等の圧電性薄膜、硫化カドミウム、硫化亜鉛、ガリウム砒素、インジウムアンチモン等の圧電半導体にも応用可能である。
【0106】
しかしながら水晶基板と他の圧電基板とは共振特性、特に温度特性に大きな差がでることから、圧電基板として水晶基板を用いることにより、温度に対する周波数の変化量を小さく抑えることができ、良好な周波数温度特性を得ることができる。このように、圧電基板に水晶基板を用い、前述した最適電極設計条件とすることで周波数温度特性に優れ、高Q値、低CI値のラム波型共振子を提供することができる。
【0107】
また、本実施形態では、IDT電極20及び反射器25,26にはAl電極を用いていたが、これら電極にはAlを主成分とする合金を用いても構わない。例えば、Au、Ag、Cu、Si、Ti、Pdなどを重量比で10%以下含有したAl合金を用いても同様な効果が得られる。
(実施例2)
【0108】
上述した実施例1では、H_IDT/λ、H_g/λ、η_IDT、η_gを適切に設定し、ΔF_IDT/F<ΔF_g/Fの条件を満たす例を示しているが、実施例2では、電極指片の交差領域の密度とギャップ部の密度とを変化させたことに特徴を有する。
【0109】
図示は省略するが、図4を参照して説明する。ここで、IDT電極20のうち、電極指片の交差領域の密度ρ_IDTと、ギャップ部の電極指片の密度ρ_gと、の関係が、ρ_IDT>ρ_gとなるよう電極の材質が選択される。
【0110】
具体的には、交差領域(幅Wiで示す範囲)にのみCu,Ag,Auまたはこれらを主成分とする金属、ギャップ部(距離Wgで示す範囲)にはAlまたはAlを主成分とする金属を用いる。
【0111】
図16は、交差領域にAl,Cu,Ag,Auを、ギャップ部にAlを用いたときの電極線幅比ηと周波数変化(周波数シフトと表す)の関係を示すグラフである。なお、図16では、H_IDT/λ=H_g/λ=0.01の場合を例示している。
【0112】
図16では、交差領域の密度が大きいほど周波数変化が大きいことを示している。つまり、ギャップ部と交差領域との周波数変化量はより大きくなる。このことは、ギャップ部におけるラム波の位相速度は、交差領域の位相速度よりも速くなることを意味する。
【0113】
従って、ρ_IDT>ρ_gとすることで、前述した実施例1と同様に、横方向のエネルギーを閉じ込めることができる。
【0114】
なお、実施例2におけるIDT電極20の形成方法としては、交差領域及びギャップ部及びバスバー電極をAlで形成し、その後、交差領域にCu,Ag,Auのいずれかの電極を形成しても、交差領域にCu,Ag,Auを、ギャップ部にAlを別に形成してもよい。この際、バスバー電極の材質は限定しなくてもよい。
【0115】
また、交差領域の電極幅とギャップ部の電極幅の関係は、ρ_IDT>ρ_gの関係を満足すれば、η_g≦η_IDT、H_g/λ≦H_IDT/λとしてもよい。
(実施例3)
【0116】
続いて、実施例3について図面を参照して説明する。実施例3は、電極指片の交差領域表面に絶縁性膜を付加したことに特徴を有する。
図17は、実施例3に係るラム波型共振子の概略構成を示す平面図である。図17において、電極指片の交差領域(幅Wiで示す領域)の表面には、絶縁性膜30が形成されている。
【0117】
絶縁性膜30としては、SiO2,Si,SiNX,AL2O3、ZnO,Ta2O5等を採用することができる。SiO2膜は、温度特性の補正膜として使われることが多く、温度特性改善効果があり、より好ましい。
また、絶縁性膜30は、交差領域の電極指片の表面にのみ形成してもよく、ゴミなどの異物による電極間の短絡不具合を解決することができる。
【0118】
このように、交差領域に上述の絶縁性膜30を装荷することにより、交差領域の質量付加効果をギャップ部の質量付加効果よりも大きくすることで、IDT電極20の全体に同じ電極材料を用いた場合においても、ρ_IDT>ρ_gとしたとき(実施例2)と同様な効果が得られる。
【0119】
なお、交差領域の電極幅とギャップ部の電極幅の関係は、絶縁性膜30を装荷すればη_g≦η_IDT、H_g/λ≦H_IDT/λとしてもよい。
【0120】
さらに、交差領域の電極指片にのみ陽極酸化させても、密度が高い金属を用いた場合と同じ効果が得られる。
(発振器)
【0121】
続いて、発振器について説明する。
発振器は、前述したラム波型共振子と、このラム波型共振子を励振するための発振回路(図示せず)を有して構成される。ラム波型共振しとしては、前述した実施例1〜実施例3に示した条件範囲のものが使用される。
【0122】
ここで、最適設計条件の範囲である各実施例において、互いに交差する電極指片の交差幅Wiは、20λ〜40λである。このような最適電極設計条件にした場合のラム波型共振子は高いQ値、低いCI値を実現できる。しかしながら、発振器に用いる場合、発振回路と組み合わせたときの発振条件を満たさなければ発振器に適用できない。
【0123】
ラム波型共振子を発振させるには、ラム波型共振子で決まる共振周波数近傍で誘導性になっていなければ発振しない。共振周波数近傍で誘導性とするには、電極指片が間挿されたときに互いに交差する交差幅Wiが影響する。
【0124】
図18は、共振周波数近傍のアドミッタンス円線図の測定結果を示している。図18において、Wiが15λ以下の場合は、アドミッタンスBがB>0となり容量性であるために発振できない。
【0125】
また、電極指片の交差幅Wiが20λ以上であればアドミッタンスBがB<0となり誘導性であるために、ラム波型共振子と発振回路とを組んだときに発振させることが可能になる。
【0126】
従って、上記から電極指片が間挿されたときに互いに交差する交差幅Wiが20λ以上であるラム波型共振子を用いることにより、良好な発振特性を有する発振器を実現できる。
【符号の説明】
【0127】
1…ラム波型共振子、10…水晶基板、20…IDT電極、21a,21b,21c,22a,22b…電極指片、21d,22c…バスバー電極、25,26…反射器。
【特許請求の範囲】
【請求項1】
複数の電極指片の一方の端部を接続するバスバー電極を有し、前記複数の電極指片の先端部を互いに間挿してなるIDT電極と、前記IDT電極のラム波の伝搬方向両側に配設される一対の反射器と、が圧電基板の一方の主面に設けられ、
ラム波の波長をλとしたとき、前記圧電基板の厚さtが、0<t/λ≦3であり、
前記IDT電極の電極指線幅をλ/2で除した値を線幅比とし、前記電極指片の交差領域の線幅比をη_IDT、波長λで規格化した規格化電極膜厚をH_IDT/λ、前記交差領域のラム波の伝搬方向に対して垂直方向端部と前記バスバー電極との間の領域であるギャップ部の電極指片の線幅比をη_g、波長λで規格化した規格化電極膜厚をH_g/λ、としたとき、
η_IDT=η_g=0のときの周波数Fを基準とした場合の前記交差領域での周波数変化ΔF_IDT/Fと、前記ギャップ部での周波数変化ΔF_g/Fと、の関係が、ΔF_IDT/F<ΔF_g/F、を満たすように、H_IDT/λ、H_g/λ、η_IDT、η_gのそれぞれが設定されていることを特徴とするラム波型共振子。
【請求項2】
請求項1に記載のラム波型共振子において、
前記圧電基板は、オイラー角(φ、θ、ψ)が、−1度≦φ≦+1度、35.0度≦θ≦47.2度、−5度≦ψ≦+5度の範囲であって、且つ厚さtとラム波の波長λとの関係が、0.176≦t/λ≦1.925を満たす水晶基板であることを特徴とするラム波型共振子。
【請求項3】
請求項1または請求項2に記載のラム波型共振子において、
前記複数の電極指片の交差幅が20λ以上であることを特徴とするラム波型共振子。
【請求項4】
請求項1ないし請求項3のいずれか一項に記載のラム波型共振子において、
前記電極指片の交差領域の密度ρ_IDTと、前記ギャップ部の電極指片の密度ρ_gと、の関係が、ρ_IDT>ρ_gであることを特徴とするラム波型共振子。
【請求項5】
請求項1または請求項2に記載のラム波型共振子において、
前記電極指片の交差領域の表面に、絶縁性を有する膜が設けられていることを特徴とするラム波型共振子。
【請求項6】
請求項1ないし請求項5のいずれか一項に記載のラム波型共振子と、
前記ラム波型共振子を励振するための発振回路と、
が備えられていることを特徴とする発振器。
【請求項1】
複数の電極指片の一方の端部を接続するバスバー電極を有し、前記複数の電極指片の先端部を互いに間挿してなるIDT電極と、前記IDT電極のラム波の伝搬方向両側に配設される一対の反射器と、が圧電基板の一方の主面に設けられ、
ラム波の波長をλとしたとき、前記圧電基板の厚さtが、0<t/λ≦3であり、
前記IDT電極の電極指線幅をλ/2で除した値を線幅比とし、前記電極指片の交差領域の線幅比をη_IDT、波長λで規格化した規格化電極膜厚をH_IDT/λ、前記交差領域のラム波の伝搬方向に対して垂直方向端部と前記バスバー電極との間の領域であるギャップ部の電極指片の線幅比をη_g、波長λで規格化した規格化電極膜厚をH_g/λ、としたとき、
η_IDT=η_g=0のときの周波数Fを基準とした場合の前記交差領域での周波数変化ΔF_IDT/Fと、前記ギャップ部での周波数変化ΔF_g/Fと、の関係が、ΔF_IDT/F<ΔF_g/F、を満たすように、H_IDT/λ、H_g/λ、η_IDT、η_gのそれぞれが設定されていることを特徴とするラム波型共振子。
【請求項2】
請求項1に記載のラム波型共振子において、
前記圧電基板は、オイラー角(φ、θ、ψ)が、−1度≦φ≦+1度、35.0度≦θ≦47.2度、−5度≦ψ≦+5度の範囲であって、且つ厚さtとラム波の波長λとの関係が、0.176≦t/λ≦1.925を満たす水晶基板であることを特徴とするラム波型共振子。
【請求項3】
請求項1または請求項2に記載のラム波型共振子において、
前記複数の電極指片の交差幅が20λ以上であることを特徴とするラム波型共振子。
【請求項4】
請求項1ないし請求項3のいずれか一項に記載のラム波型共振子において、
前記電極指片の交差領域の密度ρ_IDTと、前記ギャップ部の電極指片の密度ρ_gと、の関係が、ρ_IDT>ρ_gであることを特徴とするラム波型共振子。
【請求項5】
請求項1または請求項2に記載のラム波型共振子において、
前記電極指片の交差領域の表面に、絶縁性を有する膜が設けられていることを特徴とするラム波型共振子。
【請求項6】
請求項1ないし請求項5のいずれか一項に記載のラム波型共振子と、
前記ラム波型共振子を励振するための発振回路と、
が備えられていることを特徴とする発振器。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2010−220164(P2010−220164A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−67545(P2009−67545)
【出願日】平成21年3月19日(2009.3.19)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月19日(2009.3.19)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]