
ランドリモニタシステム
【課題】ハンガーに掛けた状態で搬送部により搬送される作業服の表裏方向の厚みを均一化するとともに縦型ランドリモニタの搬送路内へ確実に誘導し、迅速かつ正確なモニタリングを実現するランドリモニタシステムを提供する。
【解決手段】ハンガーに掛けられた作業服2を搬送する搬送部と、側面視凹字状に形成された側面の搬入口104aから搬入された作業服に対して前側検出部(上流前側検出部109a・下流前側検出部109b)および後側検出部(上流後側検出部109c・下流後側検出部109d)からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有するランドリモニタシステムであり、特に縦型ランドリモニタは、搬入口104a付近に設けられ、搬送部により搬送される作業服2を前後方向から挟んで薄くしてから検出部へ送る前側ローラ151,後側ローラ152を含むローラ部を備えるようにした。
【解決手段】ハンガーに掛けられた作業服2を搬送する搬送部と、側面視凹字状に形成された側面の搬入口104aから搬入された作業服に対して前側検出部(上流前側検出部109a・下流前側検出部109b)および後側検出部(上流後側検出部109c・下流後側検出部109d)からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有するランドリモニタシステムであり、特に縦型ランドリモニタは、搬入口104a付近に設けられ、搬送部により搬送される作業服2を前後方向から挟んで薄くしてから検出部へ送る前側ローラ151,後側ローラ152を含むローラ部を備えるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、原子力発電所など放射性物質取扱施設の管理区域から搬出される作業服の放射性物質による汚染(放射能汚染)の有無について検査するランドリモニタシステムに関する。
【背景技術】
【0002】
ランドリモニタシステムでは、汚染検出に際し、洗濯時に凹凸ができた作業服の表裏方向の厚さを均一にして作業服から検出部までの距離を一定にすることにより、検出精度を高めたいという要請があった。
【0003】
このように作業服の厚さの均一化を図るランドリモニタシステムに係る従来技術としては、例えば、特許文献1(特開平9−211132号公報,発明の名称:ランドリモニタ及びそれに用いるキャリア)に記載されたものが知られている。特許文献1のランドリモニタは、コンベア上を搬送されるランドリに対してモニタリングを行うランドリモニタであり、特にランドリを収納して一定の形状に変形させて整形するキャリアを用いるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−211132号公報(段落番号[0028],[0029],図2)
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年では縦型ランドリモニタの開発が進んでいる。この縦型ランドリモニタは、ハンガーに吊るした状態の作業服を搬送部が縦型ランドリモニタ内へ投入してモニタリングするというものである。
しかしながら、洗濯後の作業服の凹凸により、作業服が搬入口付近で引っ掛かって一時的に滞留し、特に作業服の裾(下部)が縦型ランドリモニタ内に遅れて搬送され、正常な測定ができない場合があることが実験の結果知見された。また、洗濯後の作業服を縦型ランドリモニタ内へ投入できたとしても検出部の表面で作業服がこすれてしまい、検出部を破損する恐れがあることも知見された。
【0006】
特許文献1に記載した従来技術ではキャリアがコンベア上を搬送されるというものであり、線源から検出部までの距離が一定長さであるため、正確なモニタリングを可能としている。しかしながら、ハンガーにより作業服を吊り下げた状態で放射性物質による汚染(放射能汚染)の有無について検査する縦型ランドリモニタは、作業服をハンガーに掛けたままで検出から収納まで一貫してモニタリングすることを目指すものであり、従来技術記載のキャリアへの出し入れのような作業はなくして作業員の手間を低減したいという要請があった。そこで、ハンガーから吊り下げた状態の作業服の厚みを均一化する必要があった。
【0007】
本発明は上記した問題に鑑みてなされたものであり、その目的は、ハンガーに掛けた状態で搬送部により搬送される作業服の表裏方向の厚みを均一化するとともに縦型ランドリモニタの搬送路内へ確実に誘導し、迅速かつ正確なモニタリングを実現するランドリモニタシステムを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の請求項1に係る発明のランドリモニタシステムは、
作業服が掛けられたハンガーを吊す移動フックを移動させてハンガーとともに作業服を搬送する搬送部と、側面視凹字状に形成された側面の搬入口を通じて搬入された作業服に対して前側検出部および後側検出部からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有し、放射性物質取扱施設の管理区域から搬出される作業服について放射性物質による汚染の有無を検査するランドリモニタシステムであって、この縦型ランドリモニタは、
搬入口付近に設けられており、搬送部により搬送される作業服を前後方向から挟んで薄くしてから検出部へ送る少なくとも一対のローラを含むローラ部を備えることを特徴とする。
【0009】
また、本発明の請求項2に係る発明のランドリモニタシステムは、
請求項1に記載のランドリモニタシステムにおいて、
前記ローラ部のローラは、上下方向に複数個の単位ローラを並べて配置したことを特徴とする。
【0010】
また、本発明の請求項3に係る発明のランドリモニタシステムは、
請求項2に記載のランドリモニタシステムにおいて、
上下方向に並ぶ単位ローラ間に配置され、ローラによる巻き込みを防止するとともに作業服を検出部へ誘導する巻き込み防止部を備えることを特徴とする。
【0011】
また、本発明の請求項4に係る発明のランドリモニタシステムは、
請求項1〜請求項3の何れか一項に記載のランドリモニタシステムにおいて、
前記ローラ部は、搬送方向に複数列並べて配置される複数対のローラであることを特徴とする。
【0012】
また、本発明の請求項5に係る発明のランドリモニタシステムは、
請求項4に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラ間に形成される作業服の通過幅の距離が検出部側へ近づくに連れて短くなることを特徴とする。
【0013】
また、本発明の請求項6に係る発明のランドリモニタシステムは、
請求項5に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラの半径が検出部側へ近づくに連れて長くなることを特徴とする。
【0014】
また、本発明の請求項7に係る発明のランドリモニタシステムは、
請求項5に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラの半径間距離が検出部側へ近づくに連れて短くなることを特徴とする。
【0015】
また、本発明の請求項8に係る発明のランドリモニタシステムは、
請求項1〜請求項7の何れか一項に記載のランドリモニタシステムにおいて、
前記縦型ランドリモニタは、前記ローラ部よりも上流側に配置され、搬入口側へ近づくにつれて縮幅し、作業服を搬送路中央へ移送するとともに前後方向に薄くするガイド部を備えることを特徴とする。
【0016】
また、本発明の請求項9に係る発明のランドリモニタシステムは、
請求項1〜請求項8の何れか一項に記載のランドリモニタシステムにおいて、
前記縦型ランドリモニタは、前側検出部および一対のローラの一方を有する前側本体と、後側検出部および一対のローラの他方を有する後側本体と、前側本体を前後方向に移動させる前側本体駆動部と、後側本体を前後方向に移動させる後側本体駆動部と、を備え、作業服に応じて前側本体駆動部が前側本体を、および、後側本体駆動部が後側本体を、それぞれ移動させて前側検出部から後側検出部までの前後方向の距離を変化させることを特徴とする。
【発明の効果】
【0017】
以上説明したような本発明によれば、ハンガーに掛けた状態で搬送部により搬送される作業服の表裏方向の厚みを均一化するとともに縦型ランドリモニタの搬送路内へ確実に誘導し、迅速かつ正確なモニタリングを実現するランドリモニタシステムを提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明を実施するための形態のランドリモニタシステムのシステム構成図である。
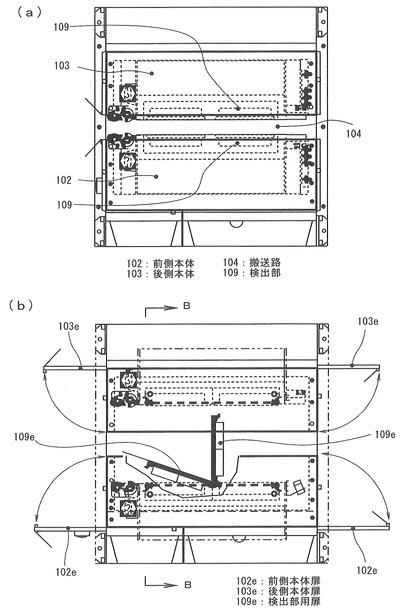
【図2】縦型ランドリモニタの外観を説明する説明図であり、図2(a)は搬入口側の側面図、図2(b)は正面図である。
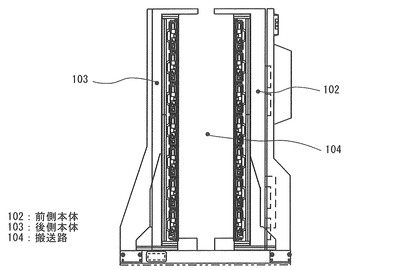
【図3】縦型ランドリモニタの内部を説明する説明図であり、図3(a)は搬入口側の側面図、図3(b)はA−A矢視図である。
【図4】縦型ランドリモニタの平面を説明する説明図であり、図4(a)は通常検出時の平面図、図4(b)は搬送路を検出部検査用に拡幅した時の平面図である。
【図5】縦型ランドリモニタの搬送路を検出部検査用に拡幅した時のB−B矢視図である。
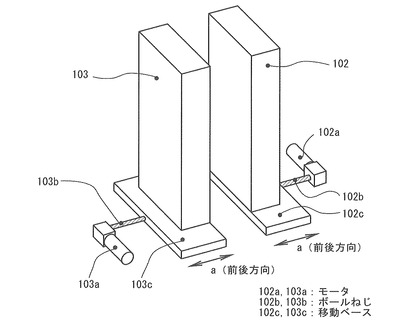
【図6】縦型ランドリモニタの前側本体及び後側本体の移動構造を説明する説明図である。
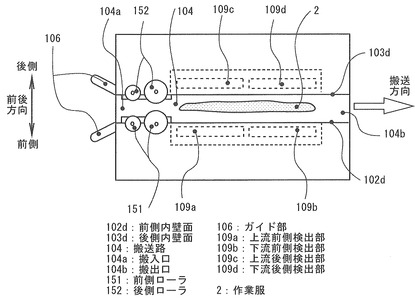
【図7】縦型ランドリモニタのローラ部を説明する平面モデル図である。
【図8】縦型ランドリモニタのローラ部を説明する内部モデル図である。
【図9】縦型ランドリモニタのローラ部を説明する要部斜視モデル図である。
【図10】縦型ランドリモニタのローラ部を説明する説明図であり、図10(a)はローラ配置を説明する説明図、図10(b)は巻き込み防止部を説明する説明図、図10(c)は巻き込み防止部の配置を説明する説明図である。
【図11】ランドリモニタシステムの回路ブロックを説明する説明図である。
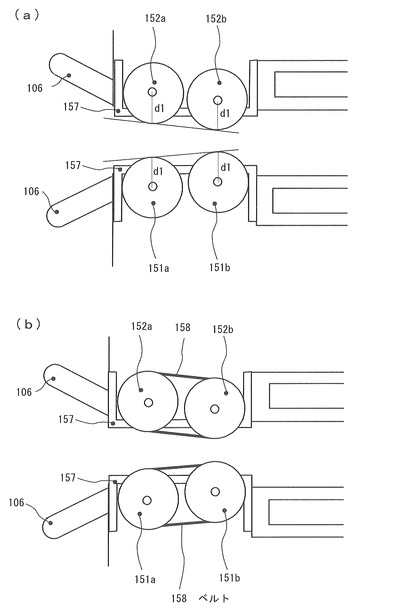
【図12】縦型ランドリモニタの他の形態を説明する説明図であり、図12(a)はローラの構造を代えた形態の説明図、図12(b)はベルトを追加した形態の説明図である。
【発明を実施するための形態】
【0019】
続いて、本発明を実施するための形態について図を参照しつつ説明する。まず、ランドリモニタシステム1の全体について説明する。
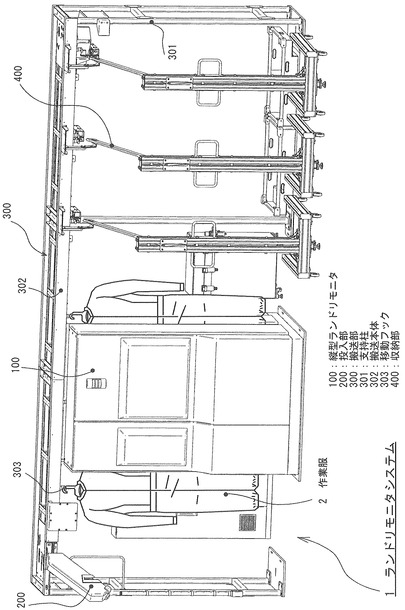
ランドリモニタシステム1は、図1で示すように、縦型ランドリモニタ100、投入部200、搬送部300、収納部400を備える。
【0020】
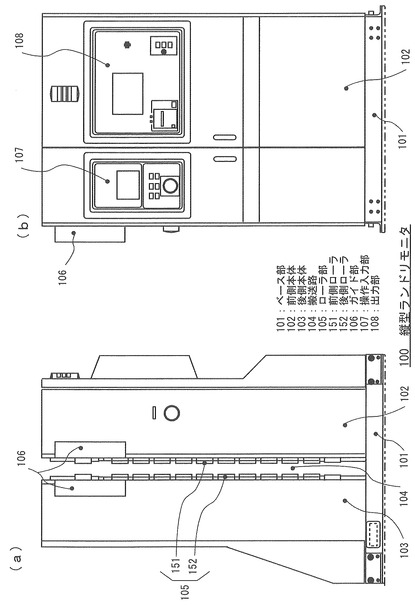
縦型ランドリモニタ100は、図2で示すように、さらに、ベース部101、前側本体102、後側本体103、搬送路104、ローラ部105、ガイド部106、操作入力部107、出力部108を備える。
【0021】
ベース部101は、床面に配置され、前側本体102、後側本体103を移動可能に支持するため堅牢な構造体として構成されている。
前側本体102は、図7で示すように、前側検出部(上流前側検出部109a、下流前側検出部109b)が配置される。
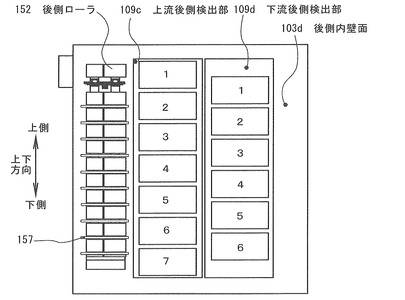
後側本体103は、図7で示すように、後側検出部(上流後側検出部109c、下流後側検出部109d)が配置される。
【0022】
前側本体102は、図6で示すように、モータ102a、ボールねじ102b、移動ベース102cを有しており、ベース部101上で矢印a方向(前後方向)にスライドガイド等により移動可能に支持されている移動ベース102cに、ボールねじ102bにより送られるナット部(図示せず)が取り付けられており、モータ102aの回転駆動により移動ベース102cが矢印a方向(前後方向)に移動するように構成されている。モータ102aは前側本体移動用モータ駆動部110(図11参照)により回転駆動される。
【0023】
同様に後前側本体103は、モータ103a、ボールねじ103b、移動ベース103cを有しており、ベース部101上で矢印a方向(前後方向)にスライドガイド等により移動可能に支持されている移動ベース103cに、ボールねじ103bにより送られるナット部(図示せず)が取り付けられており、モータ103aの回転駆動により移動ベース103cが矢印a方向(前後方向)に移動するように構成されている。モータ103aは後側本体移動用モータ駆動部111(図11参照)により回転駆動される。
【0024】
これらの構成により、前側本体102や後側本体103のような重量物を前後方向に動かすことが可能となっており、前側検出部から後側検出部までの間隔を調整し、種類の違う作業服(通常の薄手の作業服や、火気を遮蔽するために厚くなっている火気服)のモニタリングを可能としている。この際、搬送路の前後方向の中心位置と作業服2が通過する位置とが常に一致するように前側本体102や後側本体103が移動する。また、前側本体102や後側本体103では、図4(b)で示すように、保守点検時に間隔を最大限に拡げると作業員が搬送路104内へ入ることができるようになり、前側本体扉102e、後側本体扉103e、検出部用扉109eを開けて内部を容易に検査することができる。
【0025】
搬送路104は、図2(a),図3(a)で示すように、ベース部101、前側本体102および後側本体103により形成されており、側面から見るとこの搬送路104があるため略凹字状に形成されている。そして、図2(a),図4,図5,図7で示すように、上から見ると、上側が開口する搬送路104としている。縦型ランドリモニタ100は、このように側面視略凹字状の搬送路104を採用したため、搬送部300により上側から吊されている作業服2がそのまま通過できるようになされている。
【0026】
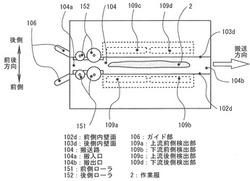
図7で示すように、搬送路104の上流側には搬入口104aが、また、搬送路104の下流側には搬出口104bがそれぞれ設けられている。
搬入口104aは、図7で示すように、縦型ランドリモニタ100内への入口である。
搬送路104は、搬入口104aに連通する空間であり、搬送路104の前後両側では作業服2の裏側と表側とに面するように上流前側検出部109a、下流前側検出部109b、上流後側検出部109c、下流後側検出部109dが配置されている。これら検出部の周囲には鉛シールド(鉄シールドなど含む)が施されており、前側本体102や後側本体103は重量物となっている。
搬出口104bは、搬送路104に連通しており、縦型ランドリモニタ100からの出口である。
これら搬入口104a、搬送路104、搬出口104bの順に作業服2が通過するようになされている。
【0027】
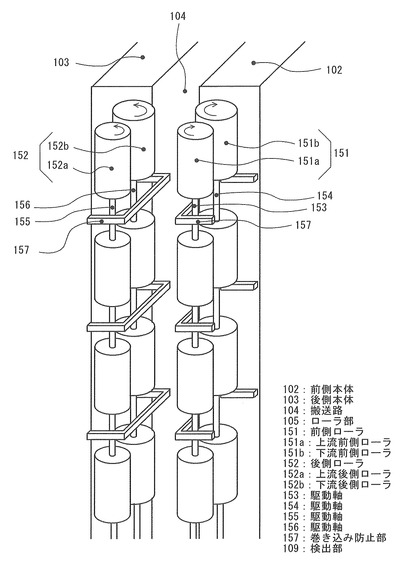
ローラ部105は、図2(a),図7で示すように、前側ローラ151と後側ローラ152とを備える。ここに前側とは図1でも見えるような縦型ランドリモニタ100の正面側を指す。また、後側とは縦型ランドリモニタ100の背面側を指す。前側ローラ151は、図9,図10(a)で示すように、さらに上流前側ローラ151aと下流前側ローラ151bとを備える。後側ローラ152は、さらに上流後側ローラ152aと下流後側ローラ152bとを備える。ここに上流側とは搬送方向に対して上流であり、下流側とは搬送方向に対して下流である。
【0028】
図9に示すように、上流前側ローラ151aは一本の駆動軸153に対して上下方向に多数の単位ローラが取り付けられて構成される。また、下流前側ローラ151bは一本の駆動軸154に対して上下方向に多数の単位ローラが取り付けられて構成される。また、上流後側ローラ152aは一本の駆動軸155に対して上下方向に多数の単位ローラが取り付けられて構成される。また、下流後側ローラ152bは一本の駆動軸156に対して上下方向に多数の単位ローラが取り付けられて構成される。
【0029】
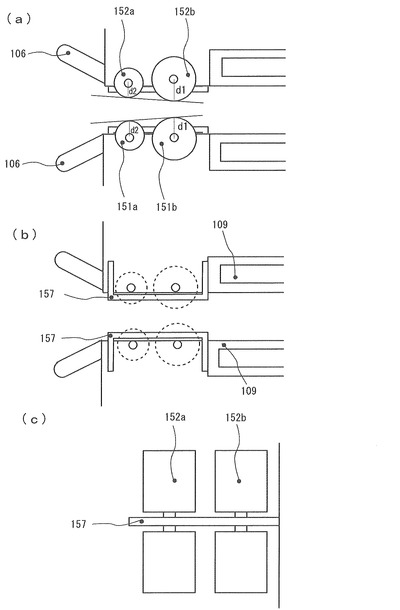
ここで特に前後で一対のローラ間(上流前側ローラ151aと上流後側ローラ152aとの間、また、下流前側ローラ151bと下流後側ローラ152bとの間)に形成される作業服の通過幅の距離が検出部側へ近づくに連れて短くなるようにしている。このため、ローラ部105では、図10(a)に示すように、上流前側ローラ151aと上流後側ローラ152aとの半径距離d2は、下流前側ローラ151bと下流後側ローラ152bとの半径距離d1よりも短くなるようにして、図10(a)に示すような共同外接線は検出部側へ近づくに連れて縮幅するようにしている。このように一対のローラの半径が検出部側へ近づくに連れて長くなるようにしている。
【0030】
このようなローラ部105は、搬入口101aを通過しようとする作業服2を前後から挟む。ローラ部105で挟まれた作業服2は洗濯によりできた凹凸が整形されて厚さが均一になり、検出部109における安定した搬送と測定を可能とする。
【0031】
また、図9,図10(b),図10(c)で示すように、上下方向に隣あう二個の単位ローラの間には作業服の巻き込みを防止する金具である巻き込み防止部157が設けられている。この巻き込み防止部157は上下方向に全ての単位ローラ間に配置される。図10(a),図10(b)でも明らかなように、巻き込み防止部157よりもローラ部の各ローラが搬送路側へ突出して配置される。
【0032】
仮に巻き込み防止部157がないと、ローラに接触する作業服が、そのまま接触を続けてローラに巻き込まれるおそれがあるが、この巻き込み防止部157の存在により、仮に作業服が巻き込まれても巻き込み防止部157に接触して所定位置以上の巻き込みを遮って作業服が搬送路へ復帰することとなり、作業服が前側ローラ151と前側本体102との間や後側ローラ152と後側本体103との間に巻き込まれるのを防いでいる。
【0033】
ガイド部106は、図7,図10で示すように、上から視て略ハ字状に形成されており、搬送方向に対して上流側が広く、また、下流側が狭く形成されている。そしてローラ部105よりも上流側に配置されている。このようなガイド部106を作業服が通過すると、作業服2を搬送路104の中央へ移送するとともに、作業服2を前後方向に薄くする。
【0034】
操作入力部107は、図2(b)で示すように縦型ランドリモニタ100の前面に設けられており、各種操作が入力される。特に作業服として通常の作業服と厚手の火気服とがあり、何れかを選択する操作を行うことができる。
出力部108は、図2(b)で示すように縦型ランドリモニタ100の前面に設けられており、各種データを表示する。
【0035】
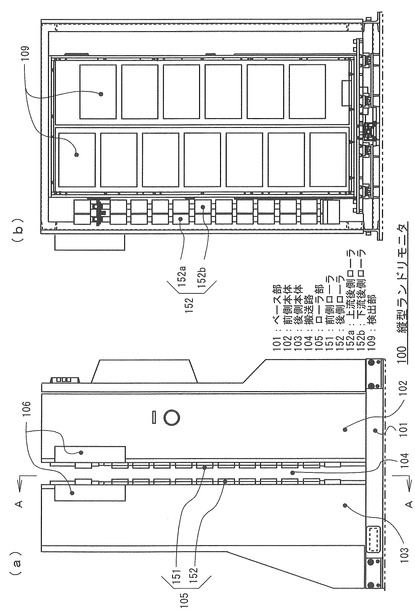
縦型ランドリモニタ100の内部には、図3(b),図7,図8で示すように、上流前側検出部109a、下流前側検出部109b、上流後側検出部109c、下流後側検出部109dが設けられている。上流前側検出部109aおよび下流前側検出部109bにより前側検出部を構成するものであり、縦型ランドリモニタ100の前側本体102内の前側内壁面102dに形成される。そして、上流後側検出部109cおよび下流後側検出部109dにより後側検出部を構成するものであり、縦型ランドリモニタ100の後側本体103内の後側内壁面103dに形成される。
【0036】
そして、図8で示すように、上下方向には複数のセンサ部を備える。ここで図示するのは上流後側検出部109cおよび下流後側検出部109dであるが、このような配置は、上流前側検出部109aおよび下流前側検出部109bについても同数が配置される。本形態では、例示的に上流後側検出部109cの上下方向の7個のセンサ部を、また、下流後側検出部109dの上下方向の6個のセンサ部を備える。そして図示していないが、上流前側検出部109aも上下方向の7個のセンサ部を、また、下流前側検出部109bも上下方向の6個のセンサ部を備える。これら上流前側検出部109aおよび下流前側検出部109bによる前側検出部と、上流後側検出部109cおよび下流後側検出部109dによる後側検出部と、を用いて搬送路104内へ搬送された作業服2の前後面に対して放射性物質による汚染(放射能汚染)の有無を検出する。
【0037】
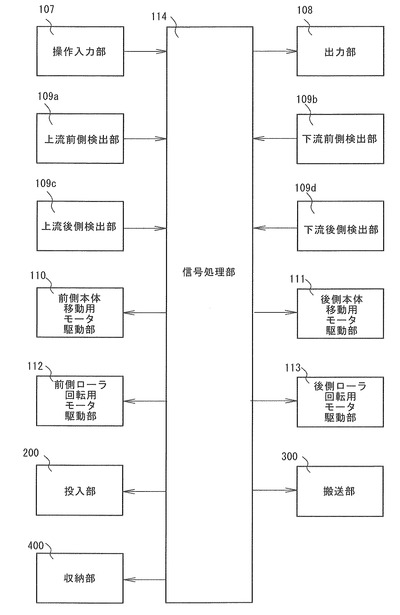
また、縦型ランドリモニタ100の内部回路としては、図11で示すように、操作入力部107、出力部108、上流前側検出部109a、下流前側検出部109b、上流後側検出部109c、下流後側検出部109d、前側本体移動用モータ駆動部110、後側本体移動用モータ駆動部111、前側ローラ回転用モータ駆動部112、後側ローラ回転用モータ駆動部113が、信号処理部114にそれぞれ接続されている。縦型ランドリモニタ100はこのようなものである。
【0038】
次に投入部200について説明する。
投入部200は、作業服2が掛けられたハンガーをセットすると、搬送部300まで移動させて搬送部300の移動フック303へハンガーを投入する。
【0039】
次に搬送部300について説明する。
搬送部300は、図1で示すように、支持柱301、搬送本体302、移動フック303を備えている。
支持柱301は、搬送本体302を下側から支持する。
搬送本体302は、図示しないが輪状のチェーンが回転しており、少なくとも縦型ランドリモニタ100の搬送路104上に経路を採るようになされている。
移動フック303は、チェーンとともに移動するように構成されている。移動フック303も縦型ランドリモニタ100の搬送路104上を移動するように構成されている。搬送部300は、このようなものである。
【0040】
次に収納部400について説明する。
収納部400は、搬送部300を移動する作業服2を仕分けした後に収納する。例えば、作業着2を大中小の三種類に分けて収納する。収納部400はこのようなものである。
【0041】
続いてランドリモニタシステム1の運用について説明する。
このようなランドリモニタシステム1は、原子力発電所等の放射性物質取扱施設内にて用いられた作業服2が放射性物質によって汚染されているか否かを検査するために用いられる。ランドリモニタシステム1を用いる作業服2の管理について概略を説明する。
【0042】
ここで、通常の薄手の作業服が以前に選定されており、今回は厚手の火気服のモニタリングを行うものとする。操作入力部107を通じて作業服が選択されたとすると、図11に示す信号処理部114は、前側本体移動用モータ駆動部110および後側本体移動用モータ駆動部111に制御信号を送る。すると、前側本体移動用モータ駆動部110は、図6に示すモータ102aを駆動する駆動信号を送り、モータ102aが回転してねじ送りを行って前側本体102を前方向(搬送路104の前後方向の幅が拡幅する方向)へ移動する。
【0043】
同様に、後側本体移動用モータ駆動部111は、図6に示すモータ103aを駆動する駆動信号を送り、モータ103aが回転してねじ送りを行って後側本体103を後方向(搬送路104の前後方向の幅が拡幅する方向)へ移動する。そして所定長さのねじ送りが完了したら終了する。これにより厚手の火気服をモニタリングするための所定幅の搬送路104が形成される。なお、通常の薄手の作業服のモニタリングに変更するならば、搬送路104が逆方向へ狭まるように駆動することとなる。
【0044】
続いて操作入力部107を通じてモニタリング開始を入力すると、信号処理部114は、搬送部300の図示しないチェーンを回転させて移動フック303が移動する状態にする。作業員が投入部200にハンガーに掛けられた状態の作業服2をセットする。投入部200はハンガーに掛けられた作業服(厚手の火気服)2を搬送部300の移動フック303へ掛けた状態として搬送部300へ投入する。この際、信号処理部114により投入タイミングが制御される。
【0045】
搬送部300の移動フック303がチェーンにより移動して、ハンガーから吊り下げられた作業服2をハンガーごと移動させる。搬送部300から吊り下げられた状態の作業服2が縦型ランドリモニタ100内に搬送される。まず、図10(a)に示すようなガイド部106へ誘導される。この際、ガイド部106は、特に厚手の火気服のフード部分を前後方向に薄くするように機能する。ガイド部106は、搬送方向に対して上流側が広いため厚手の火気服でも確実にガイド部106内へ誘導される。そして、下流側へ行くにつれて狭く形成されているため、漸次薄くなっていく。ガイド部106は、図2でも明らかなように、上側にのみ配置されているが、これは特に前後方向に厚い厚手の火気服のフード部分を予め薄くしておき、後段のローラ部で引っ掛かり等が生じにくくなるように配慮するものである。
【0046】
続いて作業服2は、ローラ部105を通過する。信号処理部114は、搬送部300の搬送速度とローラの外周面の線速度とが略一するように前側ローラ回転用モータ駆動部112および後側ローラ回転用モータ駆動部113を制御しており、図示しない前側ローラ回転用モータおよび後側ローラ回転用モータは、駆動軸153,154,155,156を回転させている。
【0047】
ローラ部105は、検出部側へ作業服を移動させるように回転しており、作業服2の搬入口104a付近での通過を補助する。同時に、前後で対をなす上流前側ローラ151aと上流後側ローラ152aという上流側のローラにより作業服2のフード頭頂から裾までを前後両側から圧縮する。これによりガイド部での圧縮からさらに薄くなるように圧縮する。続いて下流前側ローラ151bと下流後側ローラ152bという下流側のローラにより作業服2のフード頭頂から裾までを前後両側からさらに薄くなるように圧縮する。
【0048】
この際、上流前側ローラ151aと上流後側ローラ152aとの外周面の線速度と、下流前側ローラ151bと下流後側ローラ152bとの外周面の線速度とを比較すると、半径が大きい下流前側ローラ151bと下流後側ローラ152bとの線速度が速くなる。従って、上流側から下流側へ僅かながら引っ張られることとなり、この点でも作業服を薄くして凹凸面の均一化に寄与する。
【0049】
これにより前後方向の厚さを均一で薄くなるようにし、作業服が検出部を通過する時に検出部の表面に擦れることなく通過する。また、作業服から検出部までは凹凸を減らした一定の距離が見込めるようになり、検出精度も上昇する。
【0050】
これら前側検出部(上流前側検出部109aおよび下流前側検出部109b)と、後側検出部(上流後側検出部109cおよび下流後側検出部109d)と、により、放射性物質による汚染の有無が検出される。汚染がない場合には信号処理部114は、収納部400を制御し、三台ある収納部400へ搬送されてサイズ別に集められて収納するように制御させる。サイズについては、例えばハンガーに取り付けられたICタグにより判別される。そして、汚染がある場合には図示しない収納カゴ内へ落下させて収納される。
【0051】
そして信号処理部114は、前側検出部(上流前側検出部109aおよび下流前側検出部109b)と、後側検出部(上流後側検出部109cおよび下流後側検出部109d)から送信された検出信号に基づいて、搬送路104内を通過する作業服2の放射線汚染の有無を検出し、放射線汚染の有無を知らせる表示コマンドを出力部108へ送信し、出力部108の表示により汚染の有無が確認される。
【0052】
続いて他の形態について説明する。例えば、図12(a)で示すように、上流と下流とのローラについて同じ半径とし、中心軸を下流に行くにつれて搬送路側へ近づけるようにし、一対のローラの半径間距離が検出部側へ近づくに連れて短くなるようにしても良い。これによっても経路が検出部側へ近づくに連れて縮幅する。
【0053】
また、図12(b)で示すように、半径を同じくした上流と下流とのローラ間でベルト158を付けるようにしても良い。これによっても巻き込み防止の効果が見込める。そして巻き込み防止板と併用することで巻き込み防止効果がより高まるという利点もある。
【0054】
また、一対のローラの対数は二対であるものとして説明したが、単に一対としたり、三対以上としても良い。なお、本形態では経路の縮幅が実現する最小数となる上流側と下流側との二対としてコスト上昇を抑えている。
【0055】
以上本発明のランドリモニタシステムについて説明した。本発明では以下のような利点が見込める。
【0056】
(1)簡素な構成にて縦型ランドリモニタ内へ搬送される作業服の厚さの均一化を可能とした。
搬入口付近に配置されるローラ部により作業服を薄くするようにした。これにより、作業服を薄く均一にし、作業服から検出部までの距離を一定値へ近づけることとなり、さらに測定される作業服が検出部に擦れて搬送させるのを防いで検出部の検出能力を高く維持するため、長期間にわたり迅速かつ正確なモニタリングを実現するランドリモニタシステムを提供することにある。
【0057】
(2)数種類の作業服の測定が可能となった。
検出部は前側本体や後側本体というそれぞれ数トンの重量物(鉛シールド材)に取り付けられており、重力に抗して検出部を昇降させることが必要となる従来の横型ランドリモニタでは容易に動かすことが出来ず、このために検出部の間隔は一定で、厚さの違う作業服に関してはサーベイメータ等を用いて手作業により測定を行っていた。しかしながら、本発明では検出部の間隔を簡単に調整できるようにしたことにより、数種類の厚さの違う作業服の測定を可能とした。
【産業上の利用可能性】
【0058】
本発明のランドリモニタシステムは、放射性物質取扱施設、例えば原子力発電所などに設置されるランドリモニタシステムに適用される。
【符号の説明】
【0059】
1:ランドリモニタシステム
100:縦型ランドリモニタ
101:ベース部
102:前側本体
102a:モータ
102b:ボールねじ
102c:移動ベース
102d:前側内壁面
102e:前側本体扉
103:後側本体
103a:モータ
103b:ボールねじ
103c:移動ベース
103d:後側内壁面
103e:後側本体扉
104:搬送路
104a:搬入口
104b:搬出口
105:ローラ部
151:前側ローラ
151a:上流前側ローラ
151b:下流前側ローラ
152:後側ローラ
152a:上流後側ローラ
152b:下流後側ローラ
153:駆動軸
154:駆動軸
155:駆動軸
156:駆動軸
157:巻き込み防止部
158:ベルト
106:ガイド部
107:操作入力部
108:出力部
109:検出部
109a:上流前側検出部
109b:下流前側検出部
109c:上流後側検出部
109d:下流後側検出部
109e:検出部用扉
110:前側本体移動用モータ駆動部
111:後側本体移動用モータ駆動部
112:前側ローラ回転用モータ駆動部
113:後側ローラ回転用モータ駆動部
114:信号処理部
200:投入部
300:搬送部
301:支持柱
302:搬送本体
303:移動フック
400:収納部
2:作業服
【技術分野】
【0001】
この発明は、原子力発電所など放射性物質取扱施設の管理区域から搬出される作業服の放射性物質による汚染(放射能汚染)の有無について検査するランドリモニタシステムに関する。
【背景技術】
【0002】
ランドリモニタシステムでは、汚染検出に際し、洗濯時に凹凸ができた作業服の表裏方向の厚さを均一にして作業服から検出部までの距離を一定にすることにより、検出精度を高めたいという要請があった。
【0003】
このように作業服の厚さの均一化を図るランドリモニタシステムに係る従来技術としては、例えば、特許文献1(特開平9−211132号公報,発明の名称:ランドリモニタ及びそれに用いるキャリア)に記載されたものが知られている。特許文献1のランドリモニタは、コンベア上を搬送されるランドリに対してモニタリングを行うランドリモニタであり、特にランドリを収納して一定の形状に変形させて整形するキャリアを用いるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−211132号公報(段落番号[0028],[0029],図2)
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年では縦型ランドリモニタの開発が進んでいる。この縦型ランドリモニタは、ハンガーに吊るした状態の作業服を搬送部が縦型ランドリモニタ内へ投入してモニタリングするというものである。
しかしながら、洗濯後の作業服の凹凸により、作業服が搬入口付近で引っ掛かって一時的に滞留し、特に作業服の裾(下部)が縦型ランドリモニタ内に遅れて搬送され、正常な測定ができない場合があることが実験の結果知見された。また、洗濯後の作業服を縦型ランドリモニタ内へ投入できたとしても検出部の表面で作業服がこすれてしまい、検出部を破損する恐れがあることも知見された。
【0006】
特許文献1に記載した従来技術ではキャリアがコンベア上を搬送されるというものであり、線源から検出部までの距離が一定長さであるため、正確なモニタリングを可能としている。しかしながら、ハンガーにより作業服を吊り下げた状態で放射性物質による汚染(放射能汚染)の有無について検査する縦型ランドリモニタは、作業服をハンガーに掛けたままで検出から収納まで一貫してモニタリングすることを目指すものであり、従来技術記載のキャリアへの出し入れのような作業はなくして作業員の手間を低減したいという要請があった。そこで、ハンガーから吊り下げた状態の作業服の厚みを均一化する必要があった。
【0007】
本発明は上記した問題に鑑みてなされたものであり、その目的は、ハンガーに掛けた状態で搬送部により搬送される作業服の表裏方向の厚みを均一化するとともに縦型ランドリモニタの搬送路内へ確実に誘導し、迅速かつ正確なモニタリングを実現するランドリモニタシステムを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の請求項1に係る発明のランドリモニタシステムは、
作業服が掛けられたハンガーを吊す移動フックを移動させてハンガーとともに作業服を搬送する搬送部と、側面視凹字状に形成された側面の搬入口を通じて搬入された作業服に対して前側検出部および後側検出部からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有し、放射性物質取扱施設の管理区域から搬出される作業服について放射性物質による汚染の有無を検査するランドリモニタシステムであって、この縦型ランドリモニタは、
搬入口付近に設けられており、搬送部により搬送される作業服を前後方向から挟んで薄くしてから検出部へ送る少なくとも一対のローラを含むローラ部を備えることを特徴とする。
【0009】
また、本発明の請求項2に係る発明のランドリモニタシステムは、
請求項1に記載のランドリモニタシステムにおいて、
前記ローラ部のローラは、上下方向に複数個の単位ローラを並べて配置したことを特徴とする。
【0010】
また、本発明の請求項3に係る発明のランドリモニタシステムは、
請求項2に記載のランドリモニタシステムにおいて、
上下方向に並ぶ単位ローラ間に配置され、ローラによる巻き込みを防止するとともに作業服を検出部へ誘導する巻き込み防止部を備えることを特徴とする。
【0011】
また、本発明の請求項4に係る発明のランドリモニタシステムは、
請求項1〜請求項3の何れか一項に記載のランドリモニタシステムにおいて、
前記ローラ部は、搬送方向に複数列並べて配置される複数対のローラであることを特徴とする。
【0012】
また、本発明の請求項5に係る発明のランドリモニタシステムは、
請求項4に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラ間に形成される作業服の通過幅の距離が検出部側へ近づくに連れて短くなることを特徴とする。
【0013】
また、本発明の請求項6に係る発明のランドリモニタシステムは、
請求項5に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラの半径が検出部側へ近づくに連れて長くなることを特徴とする。
【0014】
また、本発明の請求項7に係る発明のランドリモニタシステムは、
請求項5に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラの半径間距離が検出部側へ近づくに連れて短くなることを特徴とする。
【0015】
また、本発明の請求項8に係る発明のランドリモニタシステムは、
請求項1〜請求項7の何れか一項に記載のランドリモニタシステムにおいて、
前記縦型ランドリモニタは、前記ローラ部よりも上流側に配置され、搬入口側へ近づくにつれて縮幅し、作業服を搬送路中央へ移送するとともに前後方向に薄くするガイド部を備えることを特徴とする。
【0016】
また、本発明の請求項9に係る発明のランドリモニタシステムは、
請求項1〜請求項8の何れか一項に記載のランドリモニタシステムにおいて、
前記縦型ランドリモニタは、前側検出部および一対のローラの一方を有する前側本体と、後側検出部および一対のローラの他方を有する後側本体と、前側本体を前後方向に移動させる前側本体駆動部と、後側本体を前後方向に移動させる後側本体駆動部と、を備え、作業服に応じて前側本体駆動部が前側本体を、および、後側本体駆動部が後側本体を、それぞれ移動させて前側検出部から後側検出部までの前後方向の距離を変化させることを特徴とする。
【発明の効果】
【0017】
以上説明したような本発明によれば、ハンガーに掛けた状態で搬送部により搬送される作業服の表裏方向の厚みを均一化するとともに縦型ランドリモニタの搬送路内へ確実に誘導し、迅速かつ正確なモニタリングを実現するランドリモニタシステムを提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明を実施するための形態のランドリモニタシステムのシステム構成図である。
【図2】縦型ランドリモニタの外観を説明する説明図であり、図2(a)は搬入口側の側面図、図2(b)は正面図である。
【図3】縦型ランドリモニタの内部を説明する説明図であり、図3(a)は搬入口側の側面図、図3(b)はA−A矢視図である。
【図4】縦型ランドリモニタの平面を説明する説明図であり、図4(a)は通常検出時の平面図、図4(b)は搬送路を検出部検査用に拡幅した時の平面図である。
【図5】縦型ランドリモニタの搬送路を検出部検査用に拡幅した時のB−B矢視図である。
【図6】縦型ランドリモニタの前側本体及び後側本体の移動構造を説明する説明図である。
【図7】縦型ランドリモニタのローラ部を説明する平面モデル図である。
【図8】縦型ランドリモニタのローラ部を説明する内部モデル図である。
【図9】縦型ランドリモニタのローラ部を説明する要部斜視モデル図である。
【図10】縦型ランドリモニタのローラ部を説明する説明図であり、図10(a)はローラ配置を説明する説明図、図10(b)は巻き込み防止部を説明する説明図、図10(c)は巻き込み防止部の配置を説明する説明図である。
【図11】ランドリモニタシステムの回路ブロックを説明する説明図である。
【図12】縦型ランドリモニタの他の形態を説明する説明図であり、図12(a)はローラの構造を代えた形態の説明図、図12(b)はベルトを追加した形態の説明図である。
【発明を実施するための形態】
【0019】
続いて、本発明を実施するための形態について図を参照しつつ説明する。まず、ランドリモニタシステム1の全体について説明する。
ランドリモニタシステム1は、図1で示すように、縦型ランドリモニタ100、投入部200、搬送部300、収納部400を備える。
【0020】
縦型ランドリモニタ100は、図2で示すように、さらに、ベース部101、前側本体102、後側本体103、搬送路104、ローラ部105、ガイド部106、操作入力部107、出力部108を備える。
【0021】
ベース部101は、床面に配置され、前側本体102、後側本体103を移動可能に支持するため堅牢な構造体として構成されている。
前側本体102は、図7で示すように、前側検出部(上流前側検出部109a、下流前側検出部109b)が配置される。
後側本体103は、図7で示すように、後側検出部(上流後側検出部109c、下流後側検出部109d)が配置される。
【0022】
前側本体102は、図6で示すように、モータ102a、ボールねじ102b、移動ベース102cを有しており、ベース部101上で矢印a方向(前後方向)にスライドガイド等により移動可能に支持されている移動ベース102cに、ボールねじ102bにより送られるナット部(図示せず)が取り付けられており、モータ102aの回転駆動により移動ベース102cが矢印a方向(前後方向)に移動するように構成されている。モータ102aは前側本体移動用モータ駆動部110(図11参照)により回転駆動される。
【0023】
同様に後前側本体103は、モータ103a、ボールねじ103b、移動ベース103cを有しており、ベース部101上で矢印a方向(前後方向)にスライドガイド等により移動可能に支持されている移動ベース103cに、ボールねじ103bにより送られるナット部(図示せず)が取り付けられており、モータ103aの回転駆動により移動ベース103cが矢印a方向(前後方向)に移動するように構成されている。モータ103aは後側本体移動用モータ駆動部111(図11参照)により回転駆動される。
【0024】
これらの構成により、前側本体102や後側本体103のような重量物を前後方向に動かすことが可能となっており、前側検出部から後側検出部までの間隔を調整し、種類の違う作業服(通常の薄手の作業服や、火気を遮蔽するために厚くなっている火気服)のモニタリングを可能としている。この際、搬送路の前後方向の中心位置と作業服2が通過する位置とが常に一致するように前側本体102や後側本体103が移動する。また、前側本体102や後側本体103では、図4(b)で示すように、保守点検時に間隔を最大限に拡げると作業員が搬送路104内へ入ることができるようになり、前側本体扉102e、後側本体扉103e、検出部用扉109eを開けて内部を容易に検査することができる。
【0025】
搬送路104は、図2(a),図3(a)で示すように、ベース部101、前側本体102および後側本体103により形成されており、側面から見るとこの搬送路104があるため略凹字状に形成されている。そして、図2(a),図4,図5,図7で示すように、上から見ると、上側が開口する搬送路104としている。縦型ランドリモニタ100は、このように側面視略凹字状の搬送路104を採用したため、搬送部300により上側から吊されている作業服2がそのまま通過できるようになされている。
【0026】
図7で示すように、搬送路104の上流側には搬入口104aが、また、搬送路104の下流側には搬出口104bがそれぞれ設けられている。
搬入口104aは、図7で示すように、縦型ランドリモニタ100内への入口である。
搬送路104は、搬入口104aに連通する空間であり、搬送路104の前後両側では作業服2の裏側と表側とに面するように上流前側検出部109a、下流前側検出部109b、上流後側検出部109c、下流後側検出部109dが配置されている。これら検出部の周囲には鉛シールド(鉄シールドなど含む)が施されており、前側本体102や後側本体103は重量物となっている。
搬出口104bは、搬送路104に連通しており、縦型ランドリモニタ100からの出口である。
これら搬入口104a、搬送路104、搬出口104bの順に作業服2が通過するようになされている。
【0027】
ローラ部105は、図2(a),図7で示すように、前側ローラ151と後側ローラ152とを備える。ここに前側とは図1でも見えるような縦型ランドリモニタ100の正面側を指す。また、後側とは縦型ランドリモニタ100の背面側を指す。前側ローラ151は、図9,図10(a)で示すように、さらに上流前側ローラ151aと下流前側ローラ151bとを備える。後側ローラ152は、さらに上流後側ローラ152aと下流後側ローラ152bとを備える。ここに上流側とは搬送方向に対して上流であり、下流側とは搬送方向に対して下流である。
【0028】
図9に示すように、上流前側ローラ151aは一本の駆動軸153に対して上下方向に多数の単位ローラが取り付けられて構成される。また、下流前側ローラ151bは一本の駆動軸154に対して上下方向に多数の単位ローラが取り付けられて構成される。また、上流後側ローラ152aは一本の駆動軸155に対して上下方向に多数の単位ローラが取り付けられて構成される。また、下流後側ローラ152bは一本の駆動軸156に対して上下方向に多数の単位ローラが取り付けられて構成される。
【0029】
ここで特に前後で一対のローラ間(上流前側ローラ151aと上流後側ローラ152aとの間、また、下流前側ローラ151bと下流後側ローラ152bとの間)に形成される作業服の通過幅の距離が検出部側へ近づくに連れて短くなるようにしている。このため、ローラ部105では、図10(a)に示すように、上流前側ローラ151aと上流後側ローラ152aとの半径距離d2は、下流前側ローラ151bと下流後側ローラ152bとの半径距離d1よりも短くなるようにして、図10(a)に示すような共同外接線は検出部側へ近づくに連れて縮幅するようにしている。このように一対のローラの半径が検出部側へ近づくに連れて長くなるようにしている。
【0030】
このようなローラ部105は、搬入口101aを通過しようとする作業服2を前後から挟む。ローラ部105で挟まれた作業服2は洗濯によりできた凹凸が整形されて厚さが均一になり、検出部109における安定した搬送と測定を可能とする。
【0031】
また、図9,図10(b),図10(c)で示すように、上下方向に隣あう二個の単位ローラの間には作業服の巻き込みを防止する金具である巻き込み防止部157が設けられている。この巻き込み防止部157は上下方向に全ての単位ローラ間に配置される。図10(a),図10(b)でも明らかなように、巻き込み防止部157よりもローラ部の各ローラが搬送路側へ突出して配置される。
【0032】
仮に巻き込み防止部157がないと、ローラに接触する作業服が、そのまま接触を続けてローラに巻き込まれるおそれがあるが、この巻き込み防止部157の存在により、仮に作業服が巻き込まれても巻き込み防止部157に接触して所定位置以上の巻き込みを遮って作業服が搬送路へ復帰することとなり、作業服が前側ローラ151と前側本体102との間や後側ローラ152と後側本体103との間に巻き込まれるのを防いでいる。
【0033】
ガイド部106は、図7,図10で示すように、上から視て略ハ字状に形成されており、搬送方向に対して上流側が広く、また、下流側が狭く形成されている。そしてローラ部105よりも上流側に配置されている。このようなガイド部106を作業服が通過すると、作業服2を搬送路104の中央へ移送するとともに、作業服2を前後方向に薄くする。
【0034】
操作入力部107は、図2(b)で示すように縦型ランドリモニタ100の前面に設けられており、各種操作が入力される。特に作業服として通常の作業服と厚手の火気服とがあり、何れかを選択する操作を行うことができる。
出力部108は、図2(b)で示すように縦型ランドリモニタ100の前面に設けられており、各種データを表示する。
【0035】
縦型ランドリモニタ100の内部には、図3(b),図7,図8で示すように、上流前側検出部109a、下流前側検出部109b、上流後側検出部109c、下流後側検出部109dが設けられている。上流前側検出部109aおよび下流前側検出部109bにより前側検出部を構成するものであり、縦型ランドリモニタ100の前側本体102内の前側内壁面102dに形成される。そして、上流後側検出部109cおよび下流後側検出部109dにより後側検出部を構成するものであり、縦型ランドリモニタ100の後側本体103内の後側内壁面103dに形成される。
【0036】
そして、図8で示すように、上下方向には複数のセンサ部を備える。ここで図示するのは上流後側検出部109cおよび下流後側検出部109dであるが、このような配置は、上流前側検出部109aおよび下流前側検出部109bについても同数が配置される。本形態では、例示的に上流後側検出部109cの上下方向の7個のセンサ部を、また、下流後側検出部109dの上下方向の6個のセンサ部を備える。そして図示していないが、上流前側検出部109aも上下方向の7個のセンサ部を、また、下流前側検出部109bも上下方向の6個のセンサ部を備える。これら上流前側検出部109aおよび下流前側検出部109bによる前側検出部と、上流後側検出部109cおよび下流後側検出部109dによる後側検出部と、を用いて搬送路104内へ搬送された作業服2の前後面に対して放射性物質による汚染(放射能汚染)の有無を検出する。
【0037】
また、縦型ランドリモニタ100の内部回路としては、図11で示すように、操作入力部107、出力部108、上流前側検出部109a、下流前側検出部109b、上流後側検出部109c、下流後側検出部109d、前側本体移動用モータ駆動部110、後側本体移動用モータ駆動部111、前側ローラ回転用モータ駆動部112、後側ローラ回転用モータ駆動部113が、信号処理部114にそれぞれ接続されている。縦型ランドリモニタ100はこのようなものである。
【0038】
次に投入部200について説明する。
投入部200は、作業服2が掛けられたハンガーをセットすると、搬送部300まで移動させて搬送部300の移動フック303へハンガーを投入する。
【0039】
次に搬送部300について説明する。
搬送部300は、図1で示すように、支持柱301、搬送本体302、移動フック303を備えている。
支持柱301は、搬送本体302を下側から支持する。
搬送本体302は、図示しないが輪状のチェーンが回転しており、少なくとも縦型ランドリモニタ100の搬送路104上に経路を採るようになされている。
移動フック303は、チェーンとともに移動するように構成されている。移動フック303も縦型ランドリモニタ100の搬送路104上を移動するように構成されている。搬送部300は、このようなものである。
【0040】
次に収納部400について説明する。
収納部400は、搬送部300を移動する作業服2を仕分けした後に収納する。例えば、作業着2を大中小の三種類に分けて収納する。収納部400はこのようなものである。
【0041】
続いてランドリモニタシステム1の運用について説明する。
このようなランドリモニタシステム1は、原子力発電所等の放射性物質取扱施設内にて用いられた作業服2が放射性物質によって汚染されているか否かを検査するために用いられる。ランドリモニタシステム1を用いる作業服2の管理について概略を説明する。
【0042】
ここで、通常の薄手の作業服が以前に選定されており、今回は厚手の火気服のモニタリングを行うものとする。操作入力部107を通じて作業服が選択されたとすると、図11に示す信号処理部114は、前側本体移動用モータ駆動部110および後側本体移動用モータ駆動部111に制御信号を送る。すると、前側本体移動用モータ駆動部110は、図6に示すモータ102aを駆動する駆動信号を送り、モータ102aが回転してねじ送りを行って前側本体102を前方向(搬送路104の前後方向の幅が拡幅する方向)へ移動する。
【0043】
同様に、後側本体移動用モータ駆動部111は、図6に示すモータ103aを駆動する駆動信号を送り、モータ103aが回転してねじ送りを行って後側本体103を後方向(搬送路104の前後方向の幅が拡幅する方向)へ移動する。そして所定長さのねじ送りが完了したら終了する。これにより厚手の火気服をモニタリングするための所定幅の搬送路104が形成される。なお、通常の薄手の作業服のモニタリングに変更するならば、搬送路104が逆方向へ狭まるように駆動することとなる。
【0044】
続いて操作入力部107を通じてモニタリング開始を入力すると、信号処理部114は、搬送部300の図示しないチェーンを回転させて移動フック303が移動する状態にする。作業員が投入部200にハンガーに掛けられた状態の作業服2をセットする。投入部200はハンガーに掛けられた作業服(厚手の火気服)2を搬送部300の移動フック303へ掛けた状態として搬送部300へ投入する。この際、信号処理部114により投入タイミングが制御される。
【0045】
搬送部300の移動フック303がチェーンにより移動して、ハンガーから吊り下げられた作業服2をハンガーごと移動させる。搬送部300から吊り下げられた状態の作業服2が縦型ランドリモニタ100内に搬送される。まず、図10(a)に示すようなガイド部106へ誘導される。この際、ガイド部106は、特に厚手の火気服のフード部分を前後方向に薄くするように機能する。ガイド部106は、搬送方向に対して上流側が広いため厚手の火気服でも確実にガイド部106内へ誘導される。そして、下流側へ行くにつれて狭く形成されているため、漸次薄くなっていく。ガイド部106は、図2でも明らかなように、上側にのみ配置されているが、これは特に前後方向に厚い厚手の火気服のフード部分を予め薄くしておき、後段のローラ部で引っ掛かり等が生じにくくなるように配慮するものである。
【0046】
続いて作業服2は、ローラ部105を通過する。信号処理部114は、搬送部300の搬送速度とローラの外周面の線速度とが略一するように前側ローラ回転用モータ駆動部112および後側ローラ回転用モータ駆動部113を制御しており、図示しない前側ローラ回転用モータおよび後側ローラ回転用モータは、駆動軸153,154,155,156を回転させている。
【0047】
ローラ部105は、検出部側へ作業服を移動させるように回転しており、作業服2の搬入口104a付近での通過を補助する。同時に、前後で対をなす上流前側ローラ151aと上流後側ローラ152aという上流側のローラにより作業服2のフード頭頂から裾までを前後両側から圧縮する。これによりガイド部での圧縮からさらに薄くなるように圧縮する。続いて下流前側ローラ151bと下流後側ローラ152bという下流側のローラにより作業服2のフード頭頂から裾までを前後両側からさらに薄くなるように圧縮する。
【0048】
この際、上流前側ローラ151aと上流後側ローラ152aとの外周面の線速度と、下流前側ローラ151bと下流後側ローラ152bとの外周面の線速度とを比較すると、半径が大きい下流前側ローラ151bと下流後側ローラ152bとの線速度が速くなる。従って、上流側から下流側へ僅かながら引っ張られることとなり、この点でも作業服を薄くして凹凸面の均一化に寄与する。
【0049】
これにより前後方向の厚さを均一で薄くなるようにし、作業服が検出部を通過する時に検出部の表面に擦れることなく通過する。また、作業服から検出部までは凹凸を減らした一定の距離が見込めるようになり、検出精度も上昇する。
【0050】
これら前側検出部(上流前側検出部109aおよび下流前側検出部109b)と、後側検出部(上流後側検出部109cおよび下流後側検出部109d)と、により、放射性物質による汚染の有無が検出される。汚染がない場合には信号処理部114は、収納部400を制御し、三台ある収納部400へ搬送されてサイズ別に集められて収納するように制御させる。サイズについては、例えばハンガーに取り付けられたICタグにより判別される。そして、汚染がある場合には図示しない収納カゴ内へ落下させて収納される。
【0051】
そして信号処理部114は、前側検出部(上流前側検出部109aおよび下流前側検出部109b)と、後側検出部(上流後側検出部109cおよび下流後側検出部109d)から送信された検出信号に基づいて、搬送路104内を通過する作業服2の放射線汚染の有無を検出し、放射線汚染の有無を知らせる表示コマンドを出力部108へ送信し、出力部108の表示により汚染の有無が確認される。
【0052】
続いて他の形態について説明する。例えば、図12(a)で示すように、上流と下流とのローラについて同じ半径とし、中心軸を下流に行くにつれて搬送路側へ近づけるようにし、一対のローラの半径間距離が検出部側へ近づくに連れて短くなるようにしても良い。これによっても経路が検出部側へ近づくに連れて縮幅する。
【0053】
また、図12(b)で示すように、半径を同じくした上流と下流とのローラ間でベルト158を付けるようにしても良い。これによっても巻き込み防止の効果が見込める。そして巻き込み防止板と併用することで巻き込み防止効果がより高まるという利点もある。
【0054】
また、一対のローラの対数は二対であるものとして説明したが、単に一対としたり、三対以上としても良い。なお、本形態では経路の縮幅が実現する最小数となる上流側と下流側との二対としてコスト上昇を抑えている。
【0055】
以上本発明のランドリモニタシステムについて説明した。本発明では以下のような利点が見込める。
【0056】
(1)簡素な構成にて縦型ランドリモニタ内へ搬送される作業服の厚さの均一化を可能とした。
搬入口付近に配置されるローラ部により作業服を薄くするようにした。これにより、作業服を薄く均一にし、作業服から検出部までの距離を一定値へ近づけることとなり、さらに測定される作業服が検出部に擦れて搬送させるのを防いで検出部の検出能力を高く維持するため、長期間にわたり迅速かつ正確なモニタリングを実現するランドリモニタシステムを提供することにある。
【0057】
(2)数種類の作業服の測定が可能となった。
検出部は前側本体や後側本体というそれぞれ数トンの重量物(鉛シールド材)に取り付けられており、重力に抗して検出部を昇降させることが必要となる従来の横型ランドリモニタでは容易に動かすことが出来ず、このために検出部の間隔は一定で、厚さの違う作業服に関してはサーベイメータ等を用いて手作業により測定を行っていた。しかしながら、本発明では検出部の間隔を簡単に調整できるようにしたことにより、数種類の厚さの違う作業服の測定を可能とした。
【産業上の利用可能性】
【0058】
本発明のランドリモニタシステムは、放射性物質取扱施設、例えば原子力発電所などに設置されるランドリモニタシステムに適用される。
【符号の説明】
【0059】
1:ランドリモニタシステム
100:縦型ランドリモニタ
101:ベース部
102:前側本体
102a:モータ
102b:ボールねじ
102c:移動ベース
102d:前側内壁面
102e:前側本体扉
103:後側本体
103a:モータ
103b:ボールねじ
103c:移動ベース
103d:後側内壁面
103e:後側本体扉
104:搬送路
104a:搬入口
104b:搬出口
105:ローラ部
151:前側ローラ
151a:上流前側ローラ
151b:下流前側ローラ
152:後側ローラ
152a:上流後側ローラ
152b:下流後側ローラ
153:駆動軸
154:駆動軸
155:駆動軸
156:駆動軸
157:巻き込み防止部
158:ベルト
106:ガイド部
107:操作入力部
108:出力部
109:検出部
109a:上流前側検出部
109b:下流前側検出部
109c:上流後側検出部
109d:下流後側検出部
109e:検出部用扉
110:前側本体移動用モータ駆動部
111:後側本体移動用モータ駆動部
112:前側ローラ回転用モータ駆動部
113:後側ローラ回転用モータ駆動部
114:信号処理部
200:投入部
300:搬送部
301:支持柱
302:搬送本体
303:移動フック
400:収納部
2:作業服
【特許請求の範囲】
【請求項1】
作業服が掛けられたハンガーを吊す移動フックを移動させてハンガーとともに作業服を搬送する搬送部と、側面視凹字状に形成された側面の搬入口を通じて搬入された作業服に対して前側検出部および後側検出部からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有し、放射性物質取扱施設の管理区域から搬出される作業服について放射性物質による汚染の有無を検査するランドリモニタシステムであって、この縦型ランドリモニタは、
搬入口付近に設けられており、搬送部により搬送される作業服を前後方向から挟んで薄くしてから検出部へ送る少なくとも一対のローラを含むローラ部を備えることを特徴とするランドリモニタシステム。
【請求項2】
請求項1に記載のランドリモニタシステムにおいて、
前記ローラ部のローラは、上下方向に複数個の単位ローラを並べて配置したことを特徴とするランドリモニタシステム。
【請求項3】
請求項2に記載のランドリモニタシステムにおいて、
上下方向に並ぶ単位ローラ間に配置され、ローラによる巻き込みを防止するとともに作業服を検出部へ誘導する巻き込み防止部を備えることを特徴とするランドリモニタシステム。
【請求項4】
請求項1〜請求項3の何れか一項に記載のランドリモニタシステムにおいて、
前記ローラ部は、搬送方向に複数列並べて配置される複数対のローラであることを特徴とするランドリモニタシステム。
【請求項5】
請求項4に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラ間に形成される作業服の通過幅の距離が検出部側へ近づくに連れて短くなることを特徴とするランドリモニタシステム。
【請求項6】
請求項5に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラの半径が検出部側へ近づくに連れて長くなることを特徴とするランドリモニタシステム。
【請求項7】
請求項5に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラの半径間距離が検出部側へ近づくに連れて短くなることを特徴とするランドリモニタシステム。
【請求項8】
請求項1〜請求項7の何れか一項に記載のランドリモニタシステムにおいて、
前記縦型ランドリモニタは、前記ローラ部よりも上流側に配置され、搬入口側へ近づくにつれて縮幅し、作業服を搬送路中央へ移送するとともに前後方向に薄くするガイド部を備えることを特徴とするランドリモニタシステム。
【請求項9】
請求項1〜請求項8の何れか一項に記載のランドリモニタシステムにおいて、
前記縦型ランドリモニタは、前側検出部および一対のローラの一方を有する前側本体と、後側検出部および一対のローラの他方を有する後側本体と、前側本体を前後方向に移動させる前側本体駆動部と、後側本体を前後方向に移動させる後側本体駆動部と、を備え、作業服に応じて前側本体駆動部が前側本体を、および、後側本体駆動部が後側本体を、それぞれ移動させて前側検出部から後側検出部までの前後方向の距離を変化させることを特徴とするランドリモニタシステム。
【請求項1】
作業服が掛けられたハンガーを吊す移動フックを移動させてハンガーとともに作業服を搬送する搬送部と、側面視凹字状に形成された側面の搬入口を通じて搬入された作業服に対して前側検出部および後側検出部からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有し、放射性物質取扱施設の管理区域から搬出される作業服について放射性物質による汚染の有無を検査するランドリモニタシステムであって、この縦型ランドリモニタは、
搬入口付近に設けられており、搬送部により搬送される作業服を前後方向から挟んで薄くしてから検出部へ送る少なくとも一対のローラを含むローラ部を備えることを特徴とするランドリモニタシステム。
【請求項2】
請求項1に記載のランドリモニタシステムにおいて、
前記ローラ部のローラは、上下方向に複数個の単位ローラを並べて配置したことを特徴とするランドリモニタシステム。
【請求項3】
請求項2に記載のランドリモニタシステムにおいて、
上下方向に並ぶ単位ローラ間に配置され、ローラによる巻き込みを防止するとともに作業服を検出部へ誘導する巻き込み防止部を備えることを特徴とするランドリモニタシステム。
【請求項4】
請求項1〜請求項3の何れか一項に記載のランドリモニタシステムにおいて、
前記ローラ部は、搬送方向に複数列並べて配置される複数対のローラであることを特徴とするランドリモニタシステム。
【請求項5】
請求項4に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラ間に形成される作業服の通過幅の距離が検出部側へ近づくに連れて短くなることを特徴とするランドリモニタシステム。
【請求項6】
請求項5に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラの半径が検出部側へ近づくに連れて長くなることを特徴とするランドリモニタシステム。
【請求項7】
請求項5に記載のランドリモニタシステムにおいて、
前記ローラ部は、前記一対のローラの半径間距離が検出部側へ近づくに連れて短くなることを特徴とするランドリモニタシステム。
【請求項8】
請求項1〜請求項7の何れか一項に記載のランドリモニタシステムにおいて、
前記縦型ランドリモニタは、前記ローラ部よりも上流側に配置され、搬入口側へ近づくにつれて縮幅し、作業服を搬送路中央へ移送するとともに前後方向に薄くするガイド部を備えることを特徴とするランドリモニタシステム。
【請求項9】
請求項1〜請求項8の何れか一項に記載のランドリモニタシステムにおいて、
前記縦型ランドリモニタは、前側検出部および一対のローラの一方を有する前側本体と、後側検出部および一対のローラの他方を有する後側本体と、前側本体を前後方向に移動させる前側本体駆動部と、後側本体を前後方向に移動させる後側本体駆動部と、を備え、作業服に応じて前側本体駆動部が前側本体を、および、後側本体駆動部が後側本体を、それぞれ移動させて前側検出部から後側検出部までの前後方向の距離を変化させることを特徴とするランドリモニタシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−227013(P2011−227013A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−99398(P2010−99398)
【出願日】平成22年4月23日(2010.4.23)
【出願人】(000005234)富士電機株式会社 (3,146)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月23日(2010.4.23)
【出願人】(000005234)富士電機株式会社 (3,146)
【Fターム(参考)】
[ Back to top ]