
ランドリモニタシステム
【課題】ハンガーに掛けた状態の作業服を所定タイミングにて低所から高所へ移動させて搬送部が係止することで投入するようにし、作業員の作業や判断を少なくして作業員の手間を低減するランドリモニタシステムを提供する。
【解決手段】作業服が掛けられたハンガーのアーチ部が投入される投入口133と、投入されたハンガーのアーチ部を押送して作業服とともにハンガーを移送させる移送部と、移送されたハンガーのアーチ部を投入位置にて係止させる投入フック135と、を有する投入装置を備え、投入フック135に係止されるハンガーのアーチ部を搬送部の移動フックが移動させ、投入フック135から離れたハンガーのアーチ部を移動フックに係止させて搬送部への投入が行なわれるようにした。
【解決手段】作業服が掛けられたハンガーのアーチ部が投入される投入口133と、投入されたハンガーのアーチ部を押送して作業服とともにハンガーを移送させる移送部と、移送されたハンガーのアーチ部を投入位置にて係止させる投入フック135と、を有する投入装置を備え、投入フック135に係止されるハンガーのアーチ部を搬送部の移動フックが移動させ、投入フック135から離れたハンガーのアーチ部を移動フックに係止させて搬送部への投入が行なわれるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、原子力発電所など放射性物質取扱施設の管理区域から搬出される作業服の放射性物質による汚染(放射能汚染)の有無について検査するランドリモニタシステムに関する。
【背景技術】
【0002】
ランドリモニタシステムでは、作業服の投入に際し、服の袖や脚を折り曲げる必要があるなど手間を要するものであり、作業服の投入を簡単に行えるようにしたいという要請があった。
【0003】
このように作業服の投入に関するランドリモニタシステムに係る従来技術としては、例えば、特許文献1(特開2008−51503号公報,発明の名称:ランドリモニタ)に記載されたものが知られている。特許文献1のランドリモニタは、コンベア上を搬送されるランドリに対してモニタリングを行うランドリモニタであり、特に作業台の形状を工夫して服の脚を投入しやすくしたものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−51503号公報号公報(段落番号[0021],図2)
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年では縦型ランドリモニタの開発が進んでいる。この縦型ランドリモニタは、ハンガーに吊るした状態の作業服を搬送部が縦型ランドリモニタ内へ投入してモニタリングするというものである。縦型ランドリモニタでは高所にある搬送部にハンガーのアーチ部を引っ掛ける必要がある。例えば、大規模な放射線施設では一日に数百人分もの作業服をモニタリングすることもあり、作業服の投入作業は手間を要するものであった。
【0006】
特許文献1に記載した従来技術では作業服がコンベア上を搬送されるというものであり、線源から検出部までの距離が一定長さであるため、正確なモニタリングを可能としている。しかしながら、特許文献1のランドリモニタは、作業服のランドリモニタへの投入は、作業員が作業服の向きや折り畳み状態等を確認しながら手作業により投入するというものであり、また、次の作業服を投入するタイミングは、投入可能ランプを目で確認しながら投入を行うというものであった。従って、作業員の作業や判断が多数必要であり、作業員の負担は少なくないものであった。
これら従来技術では作業員が投入に手間を要するという問題があった。
【0007】
本発明は上記した問題に鑑みてなされたものであり、その目的は、ハンガーに掛けた状態の作業服を所定タイミングにて低所から高所へ移動させて搬送部が係止することで投入するようにし、作業員の作業や判断を少なくして作業員の手間を低減するランドリモニタシステムを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の請求項1に係る発明のランドリモニタシステムは、
作業服が掛けられたハンガーを吊す移動フックを移動させてハンガーとともに作業服を搬送する搬送部と、側面視凹字状に形成された側面の搬入口を通じて搬入された作業服に対して前側検出部および後側検出部からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有し、放射性物質取扱施設の管理区域から搬出される作業服について放射性物質による汚染の有無を検査するランドリモニタシステムであって、
作業服が掛けられたハンガーのアーチ部が投入される投入口と、投入されたハンガーのアーチ部を押送して作業服とともにハンガーを移送させる移送部と、移送されたハンガーのアーチ部を投入位置にて係止させる投入フックと、を有する投入装置を備え、投入フックに係止されるハンガーのアーチ部を搬送部の移動フックが移動させ、投入フックから離れたハンガーのアーチ部を移動フックに係止させて搬送部への投入が行なわれることを特徴とする。
【0009】
また、本発明の請求項2に係る発明のランドリモニタシステムは、
請求項1に記載のランドリモニタシステムにおいて、
前記投入装置は、投入口の開閉を行うシャッタを備え、シャッタを開くことにより、作業服の投入タイミングを作業員に通知することを特徴とする。
【0010】
また、本発明の請求項3に係る発明のランドリモニタシステムは、
請求項2に記載のランドリモニタシステムにおいて、
前記投入装置は、前記シャッタが閉まるように付勢する付勢部を備え、前記移送部が投入口側へ移送されたときに前記移送部が前記シャッタを押すと共に投入口が開かれ、前記移送部が投入フック側へ移送されたときにシャッタが閉まるように付勢部が付勢して投入口が閉じられることを特徴とする。
【0011】
また、本発明の請求項4に係る発明のランドリモニタシステムは、
請求項1〜請求項3の何れか一項に記載のランドリモニタシステムにおいて、
前記投入フックは、下側へ傾斜してアーチ部の下降とともにハンガーを下降させる下降部と、上側へ上昇してアーチ部の上昇とともにハンガーを制動停止させる上昇部と、下降部と上昇部との間に形成されておりアーチ部の停止とともにハンガーを投入位置に停止させる谷部と、を有し、前記投入フックは、搬送方向に対して所定角度傾斜することを特徴とする。
【0012】
また、本発明の請求項5に係る発明のランドリモニタシステムは、
請求項4に記載のランドリモニタシステムにおいて、
前記投入フックは、搬送方向に対して60°傾斜することを特徴とする。
【0013】
また、本発明の請求項6に係る発明のランドリモニタシステムは、
請求項1〜請求項5の何れか一項に記載のランドリモニタシステムにおいて、
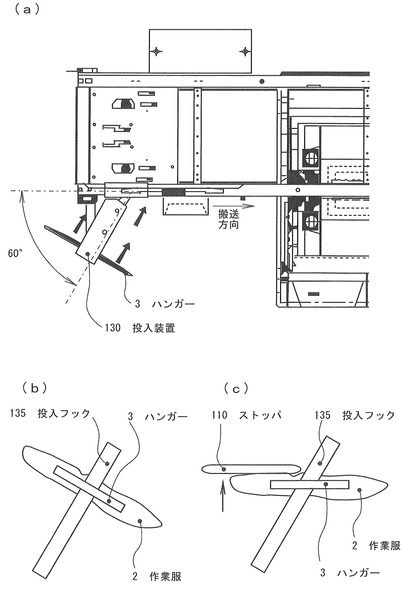
前記投入フックを移動するハンガーの作業服に衝突して作業服の揺れを抑えるストッパを備えることを特徴とする。
【0014】
また、本発明の請求項7に係る発明のランドリモニタシステムは、
請求項6に記載のランドリモニタシステムにおいて、
前記ストッパは電気的に接地されており、作業服の静電気を除去することを特徴とする。
【0015】
また、本発明の請求項8に係る発明のランドリモニタシステムは、
請求項1〜請求項7の何れか一項に記載のランドリモニタシステムにおいて、
前記搬送部の移動フックは、投入フックの谷部にあるハンガーの首部に当接し、搬送方向へ移動しながらハンガーのアーチ部を上昇部先端まで引き寄せ、上昇部先端からアーチ部が離れるときにアーチ部の落下によりハンガーを引っ掛けることを特徴とする。
【0016】
また、本発明の請求項9に係る発明のランドリモニタシステムは、
請求項1〜請求項8の何れか一項に記載のランドリモニタシステムにおいて、
前記投入装置の投入口の周囲を覆うカラー表示部を備えることを特徴とする。
【0017】
また、本発明の請求項10に係る発明のランドリモニタシステムは、
請求項1〜請求項9の何れか一項に記載のランドリモニタシステムにおいて、
前記移送部の移動が見えるように一部または全部が透明なケースを備えることを特徴とする。
【発明の効果】
【0018】
以上説明したような本発明によれば、ハンガーに掛けた状態の作業服を所定タイミングにて低所から高所へ移動させて搬送部が係止することで投入するようにし、作業員の作業や判断を少なくして作業員の手間を低減するランドリモニタシステムを提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明を実施するための形態のランドリモニタシステムのシステム構成図である。
【図2】本発明を実施するための形態のランドリモニタシステムの平面図である。
【図3】投入部の説明図である。
【図4】投入部の説明図であり、図4(a)は特に投入装置の傾斜角度を説明する説明図、図4(b)はストッパがないときの投入部の説明図、図4(c)はストッパがあるときの投入部の説明図である。
【図5】投入装置の外観を説明する説明図であり、図5(a)は側面図、図5(b)は正面図である。
【図6】投入装置の内部構造の説明図であり、図6(a)は内部正面図、図6(b)はシャッタの平面図、図6(c)はA−A矢視図である。
【図7】シャッタと押し出し部とを透明にした投入装置の内部構造の説明図である。
【図8】投入装置の内部構造の説明図であり、図8(a)はシャッタを開くときの動作説明図、図8(b)はシャッタを閉じるときの動作説明図である。
【図9】移送部を投入フック側へ移動させたときの投入装置の内部構造の説明図である。
【図10】ハンガーの説明図である。
【図11】作業服を掛けたハンガーの説明図である。
【図12】ハンガーの移動を説明する説明図である。
【図13】投入部におけるハンガーの搬送部への投入を説明する説明図である。
【図14】縦型ランドリモニタの外観を説明する説明図であり、図14(a)は搬入口側の側面図、図14(b)は正面図である。
【図15】縦型ランドリモニタの内部を説明する説明図であり、図15(a)は搬入口側の側面図、図15(b)はB−B矢視図である。
【図16】縦型ランドリモニタのローラ部を説明する平面モデル図である。
【図17】縦型ランドリモニタのローラ部を説明する内部モデル図である。
【図18】ランドリモニタシステムの回路ブロックを説明する説明図である。
【発明を実施するための形態】
【0020】
続いて、本発明を実施するための形態について図を参照しつつ説明する。まず、ランドリモニタシステム1の全体について説明する。
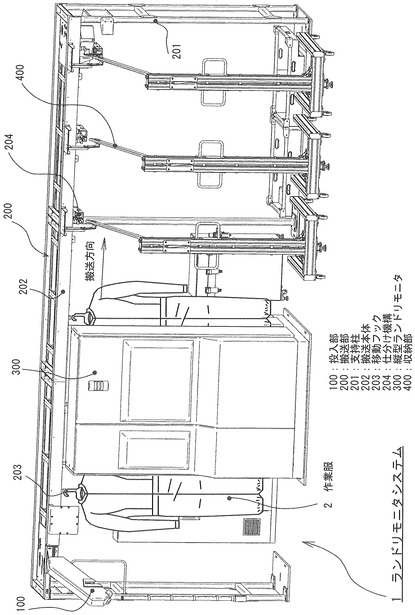
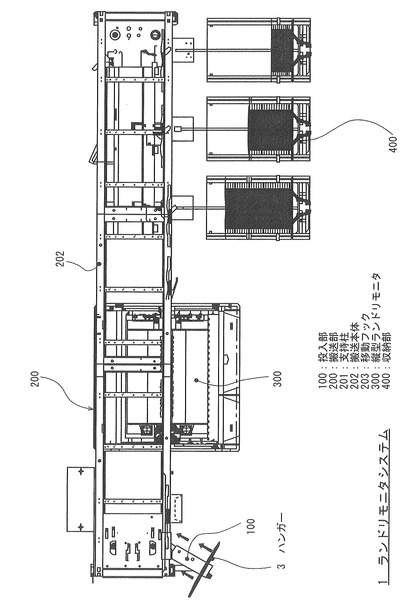
ランドリモニタシステム1は、図1,図2で示すように、投入部100、搬送部200、縦型ランドリモニタ300、収納部400を備える。
【0021】
投入部100は、作業服2が掛けられたハンガー3(図11参照)をセットすると、搬送部200まで移動させて搬送部200の移動フック203へ、このハンガー3を投入する。
搬送部200は、作業服2が掛けられたハンガー3を移動フック203により搬送方向へ移動させる。
縦型ランドリモニタ300は、通過する作業服2の放射能汚染についてモニタリングを行う。
収納部400は、搬送部200を移動する作業服2を仕分け機構204によって仕分けした後に収納する。仕分け機構204は、作業服2が所定の収納位置まで搬送されてきた時点で、不図示のプッシャーによりハンガー3を搬送方向と直交する方向に押し出すようにして移動フック203に係止されたハンガー3を脱離させるものであり、本形態では、作業服2を大中小の三種類に分けて収納するようにしている。また、高汚染の作業着2は廃棄用のボックス(図示せず)へ落として回収する。ランドリモニタシステム1はこのようなものである。
【0022】
続いて各部の詳細について説明する。まず、本発明の特徴をなす投入部100について説明する。
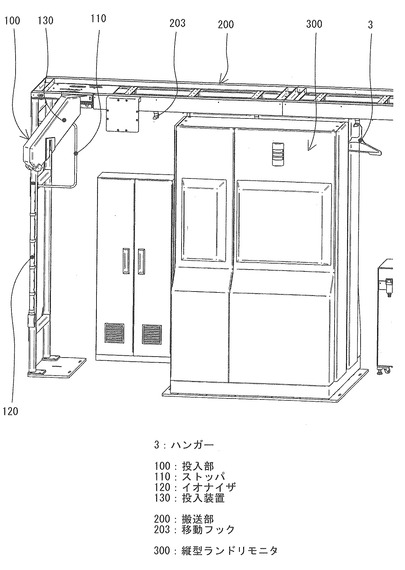
投入部100は、図3,図4で示すように、ストッパ110、イオナイザ120、投入装置130を備えている。
【0023】
ストッパ110は、投入装置130の下側に搬送部200の搬送方向と平行をなすように配置されており、投入位置へ投入された作業服2に当接して揺れを防止する。ストッパ110がないと、図4(b)で示すような方向で作業服2およびハンガー3は安定するが、本発明のようにストッパ110があると、図4(c)で示すように、作業服2およびハンガー3が安定しようする回転力が常時働きつつ作業服2がストッパ110へ当接することとなり、作業服2がストッパ110へ当接する状態を維持する。
【0024】
また、ストッパ110は、電気的に接地されているため、作業服2に帯電する静電気を除電する。静電気は検出時のノイズ成分や故障の原因となるため、予め除去することで高い検出精度を維持する。そして先に説明したように作業服2およびハンガー3が安定しようする力が働いて作業服2がストッパ110に当接する状態を維持するため、確実に除電される。
【0025】
イオナイザ120は、プラスイオンやマイナスイオンを発生させる。これらイオンは作業服2の静電気を中和してからストッパ110を通じてグラウンドに流れるため、作業服2が確実に除電される。
【0026】
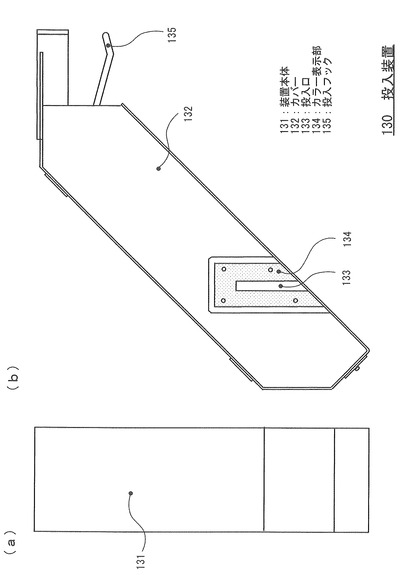
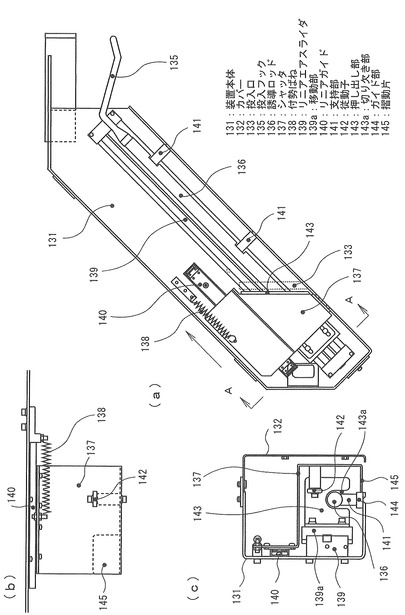
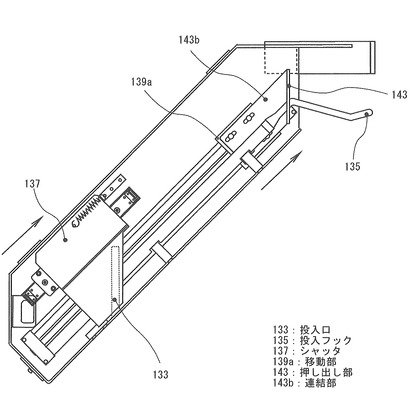
投入装置130は、図4(a)で示すように搬送装置200に対して傾斜した状態で配置される。傾斜角度は搬送方向に対して60°である。この傾斜によりストッパ110に作業服2を当接させている。この投入装置130は、図5,図6で示すように、装置本体131、カバー132、投入口133、カラー表示部134、投入フック135、誘導ロッド136、シャッタ137、付勢ばね138、リニアエアスライダ139、リニアガイド140、支持部141、従動子142、押し出し部143、ガイド部144、摺動片145を備えている。
【0027】
装置本体131は、メカベースとして機能する。
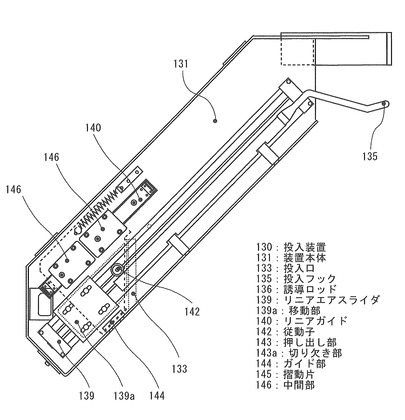
カバー132は、装置本体131へ固定された各部を覆う。このカバー132は透明な材料により形成されており、特にリニアエアスライダ139の移動部139aと押し出し部143とからなる移送部の昇降位置を目視により判別できるようにしている。
【0028】
投入口133は、カバー132に開けられている。投入口133にハンガー3のアーチ部3a(図10参照)を入れるとアーチ部3aは誘導ロッド136上へ載せられる。
カラー表示部134は、投入口133の周囲に設けられており、投入口133の存在を作業者に注意喚起する。また、シャッタ135と色を異ならせてシャッタ135の有無を喚起する。
【0029】
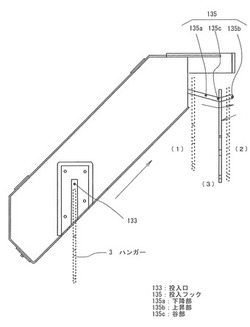
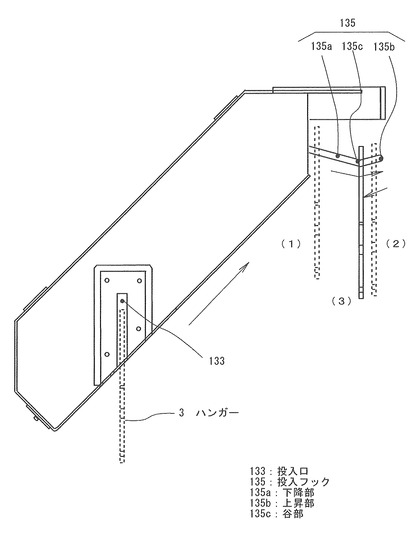
投入フック135は、棒状の部材を折り曲げて形成しており、さらに下降部135a、上昇部135b、谷部135cを備える(図12参照)。
下降部135aは、下側へ傾斜してアーチ部3aの下降とともにハンガー3を下降させる。
上昇部135bは、上側へ上昇してアーチ部3aの上昇とともにハンガー3の移動を停止させる。
谷部135cは、下降部135aと上昇部135bとの間に形成されておりアーチ部3aの停止とともにハンガー3が停止する。投入フック135は、図4(a)で示すように、上から見ると搬送方向に対して所定角度傾斜する。この傾斜角度は60°である。
【0030】
誘導ロッド136は、投入口133に投入されたハンガー3のアーチ部3aが係止されるロッドであり、投入口133から投入フック135まで連通している。
シャッタ137は、図6(b),図6(c)に示すように板体を折り曲げて形成した部材であって矢印方向に移動可能に設けられており、投入口133の開閉を行う。
付勢ばね138は、シャッタ137を投入フック135側へ付勢する引っ張りばねであり、シャッタ137は通常は図9で示すように閉じられている。
【0031】
リニアエアスライダ139は、移動部139aが投入口側と投入フック側との間を移動するようになされている。例えば、リニアエアスライド駆動部503(図18参照)により図示しない電磁弁が開閉するようになされており、電磁弁の開閉に応じてエアがリニアエアスライダ139内へ流入して移動部139aが移動する。
【0032】
リニアガイド140は、その移動部が中間部146(図7参照)を介してシャッタ137と機械的に連結されており、シャッタ137を移動部139aの移送方向と平行に移動させる。
支持部141は、誘導ロッド136が所定位置にあるように機械的に支持する。
従動子142は、シャッタ137の裏側に設けられており、図7で示すような位置にて押し出し部143と当接している。シャッタ137が投入口133側にあるときは、付勢ばね138の付勢力により従動子142と押し出し部143は当接している
【0033】
押し出し部143は、切り欠き部143a、連結部143b(図8参照)を備え、移動部139aに連結部143bが連結されて移動部139aとともに移動する。切り欠き部143aには誘導ロッド136が挿通されており、押し出し部143は誘導ロッド136にあるハンガー3のアーチ部3aを確実に押し出す。
【0034】
ガイド部144は、装置本体131の下側に設けられている立方体である。
摺動片145は、シャッタ137の下側に設けられておりガイド部144と接する。リニアガイド140で片持ち支持されているシャッタ137が移動するときにガイド部144が摺動片145をガイドしてシャッタ137の投入口133と対向する面が所定経路を通過するように位置決めする。
【0035】
続いて、投入装置130の動作について説明する。
リニアエアスライド139に流入するエアにより移動部139aは投入口133側と投入フック135側との間を移動する。移動部139aが図7で示すように投入口133側へ移動すると、図8(a)で示すように、押し出し部143が矢印a方向へ移動する。すると従動子142が矢印b方向へ押されるため、シャッタ137も付勢力に抗しつつ矢印c方向へ移動する。このとき、図6で示すように、シャッタ137が移動して投入口133を開く。
【0036】
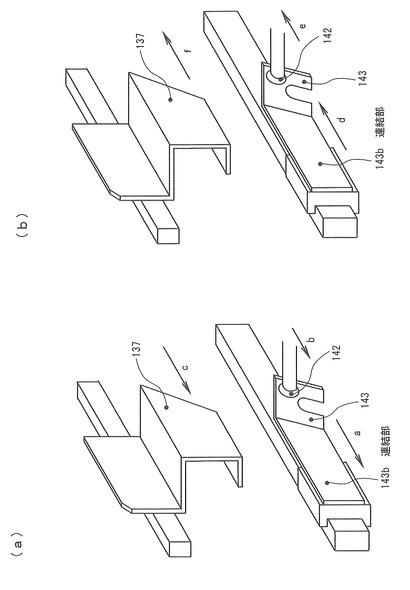
また、移動部139aが図9で示すように投入フック135側へ移動すると、図8(b)で示すように、押し出し部143が矢印d方向へ移動する。すると従動子142が矢印e方向へ従動していき、シャッタ137も付勢力により矢印f方向へ移動する。このとき、図9で示すように、シャッタ137が投入口133を閉じる。そして所定距離押し出し部143が矢印d方向へ移動すると、従動子142から押し出し部143が離れてシャッタ137が投入口133を閉じた状態を維持する。
【0037】
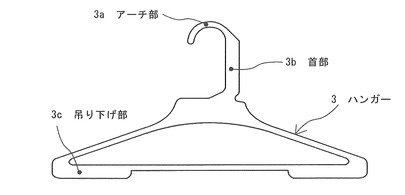
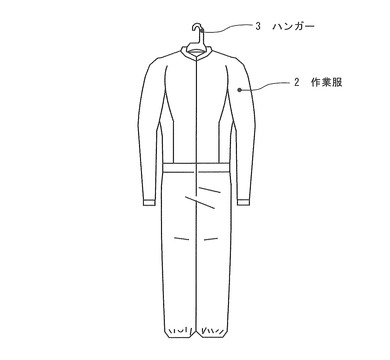
続いて投入装置130への投入について説明する。ハンガー3は、図10で示すように、アーチ部3a、首部3b、吊り下げ部3cを含み、図11で示すように吊り下げ部3cに作業服2を吊り下げるものである。
【0038】
図12で示すように、ハンガー3を投入口へ投入すると、投入フック135側へ移送される。投入フック135ではまず、(1)のように下降部135aにアーチ部があると下降を開始し、上昇部135bにより制動されつつ作業服2もストッパ110に当たって揺れが防止され、最終的に谷部135cにて停止する。谷部135cは投入位置となっている。投入位置では作業服2はストッパ110に当たった状態で静止している。
【0039】
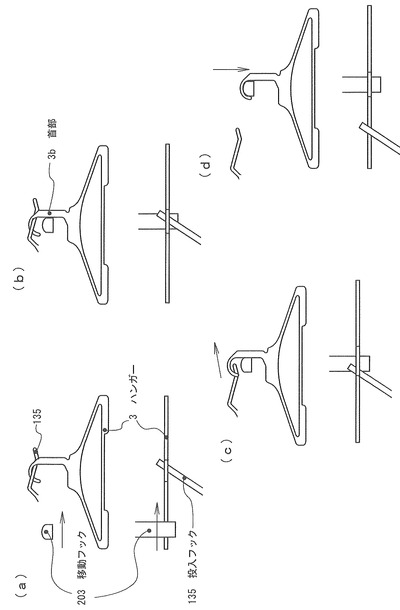
続いて、搬送部200への投入について説明する。図13(a)〜(d)ではそれぞれ上側に正面から見た図と下側に平面か見た図とが併記されている。図13(a)に示すように移動フック203が搬送方向を移動し、図13(b)に示すように移動フック203が首部3bに当接する。この際、ストッパ110の作用により揺れが発生することはない。図13(c)に示すようにアーチ部3aが投入フック135に沿って移動していき、最終的に図13(d)に示すようにアーチ部3aが移動フック203へ落下して搬送部200への投入が完了するというものである。投入部100は、このようなものである。
【0040】
続いて搬送部200について説明する。搬送部200は、図1で示すように、支持柱201、搬送本体202、移動フック203を備えている。
支持柱201は、搬送本体202を下側から支持する。
搬送本体202は、図示しないが輪状のチェーンが回転しており、少なくとも縦型ランドリモニタ300の搬送路304上に経路を採るようになされている。
移動フック203は、チェーンとともに移動するように構成されている。移動フック203も縦型ランドリモニタ300の搬送路304上を移動するように構成されている。搬送部200は、このようなものである。
【0041】
続いて縦型ランドリモニタ300について説明する。
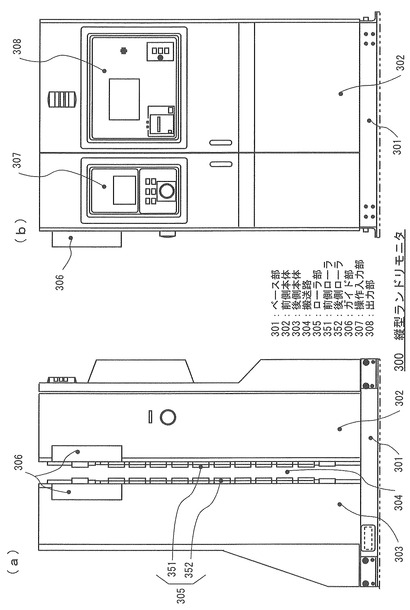
縦型ランドリモニタ300は、図14で示すように、さらに、ベース部301、前側本体302、後側本体303、搬送路304、ローラ部305、ガイド部306、操作入力部307、出力部308を備える。
【0042】
ベース部301は、床面に配置され、前側本体302、後側本体303を移動可能に支持するため堅牢な構造体として構成されている。
前側本体302は、図16で示すように、前側検出部(上流前側検出部309a、下流前側検出部309b)が配置される。
後側本体303は、図16で示すように、後側検出部(上流後側検出部309c、下流後側検出部309d)が配置される。
【0043】
前側本体302は、図示しないが前後方向へ移動するように構成されている。
同様に後前側本体303は、前後方向へ移動するように構成されている。
前側本体302や後側本体303の移動により、前側検出部から後側検出部までの間隔を調整し、種類の違う作業服(通常の薄手の作業服や、火気を遮蔽するために厚くなっている火気服)の測定を可能としている。この際、搬送路の前後方向の中心位置と作業幅が通過する位置とが常に一致するように前側本体302や後側本体303が移動する。
【0044】
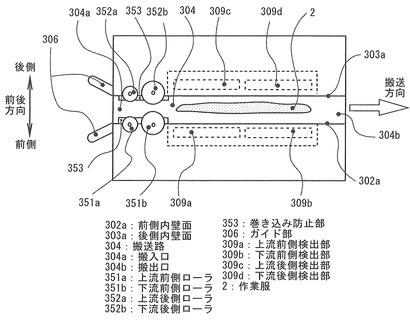
搬送路304は、図14(a)で示すように、ベース部301、前側本体302および後側本体303により形成されており、側面から見るとこの搬送路304があるため略凹字状に形成されている。そして、図16で示すように、上から見ると、上側が開口する搬送路304としている。縦型ランドリモニタ300は、このように側面視略凹字状の搬送路304を採用したため、搬送部200により上側から吊されている作業服2がそのまま通過できるようになされている。
【0045】
図16で示すように、搬送路304の上流側には搬入口304aが、また、搬送路304の下流側には搬出口304bがそれぞれ設けられている。
搬入口304aは、図16に示すように、縦型ランドリモニタ300内への入口である。
搬送路304は、搬入口304aに連通する空間であり、搬送路304の前後両側では作業服2の裏側と表側とに面するように上流前側検出部309a、下流前側検出部309b、上流後側検出部309c、下流後側検出部309dが配置されている。これら検出部の周囲には鉛シールド(鉄シールドなど含む)が施されており、前側本体302や後側本体303は重量物となっている。
搬出口304bは、搬送路304に連通しており、縦型ランドリモニタ300からの出口である。
これら搬入口304a、搬送路304、搬出口304bの順に作業服2が通過するようになされている。
【0046】
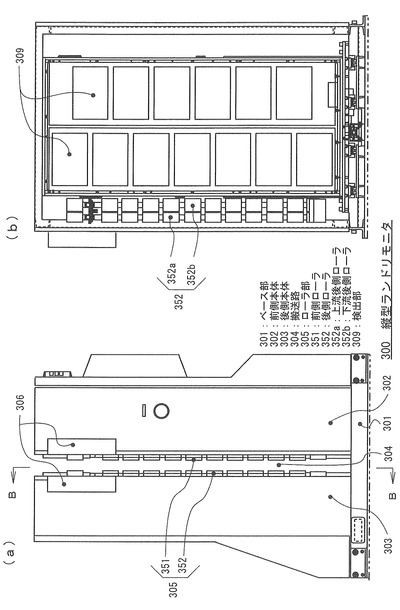
ローラ部305は、図15,図16,図17で示すように、前側ローラ351と後側ローラ352とを備える。ここに前側とは図1や図14(b)でも見えるような縦型ランドリモニタ300の正面側を指す。また、後側とは縦型ランドリモニタ300の背面側を指す。前側ローラ351は、さらに上流前側ローラ351aと下流前側ローラ351bとを備える。後側ローラ352は、さらに上流後側ローラ352aと下流後側ローラ352bとを備える。ここに上流側とは搬送方向に対して上流であり、下流側とは搬送方向に対して下流である。
【0047】
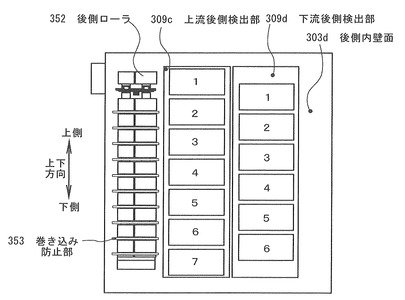
これら上流前側ローラ351a、下流前側ローラ351b、上流後側ローラ352a、下流後側ローラ352bは、図17に示すように、それぞれ一本の駆動軸に対して上下方向に多数の単位ローラが取り付けられて構成される。
ここで特に前後で一対のローラ間(上流前側ローラ351aと上流後側ローラ352aとの間、また、下流前側ローラ351bと下流後側ローラ352bとの間)に形成される作業服の通過幅の距離が検出部側へ近づくに連れて短くなるようにしている。このため、ローラ部305では、図16に示すように、上流前側ローラ351aと上流後側ローラ352aとの半径距離は、下流前側ローラ351bと下流後側ローラ352bとの半径距離よりも短くなるようにして、共同外接線は検出部側へ近づくに連れて縮幅するようにしている。このように一対のローラの半径が検出部側へ近づくに連れて長くなるようにしている。
【0048】
このようなローラ部305は、搬入口301aを通過しようとする作業服2を前後から挟む。ローラ部305で挟まれた作業服2は洗濯によりできた凹凸が整形されて厚さが均一になり、検出部309における安定した搬送と測定を可能とする。
【0049】
また、図16,図17で示すように、上下方向に隣あう二個の単位ローラの間には作業服の巻き込みを防止する金具である巻き込み防止部353が設けられている。この巻き込み防止部353は上下方向に全ての単位ローラ間に配置される。図16でも明らかなように、巻き込み防止部353よりもローラ部305の各ローラが搬送路304側へ突出して配置される。
【0050】
仮に巻き込み防止部353がないと、ローラに接触する作業服2が、そのまま接触を続けてローラに巻き込まれるおそれがあるが、この巻き込み防止部353の存在により、仮に作業服2が巻き込まれても巻き込み防止部353に接触して所定位置以上の巻き込みを遮って作業服2が搬送路へ復帰することとなり、作業服2が前側ローラ351と前側本体302との間や、後側ローラ352と後側本体303との間に巻き込まれるのを防いでいる。
【0051】
ガイド部306は、図16で示すように、上から視て略ハ字状に形成されており、搬送方向に対して上流側が広く、また、下流側が狭く形成されている。そしてローラ部305よりも上流側に配置されている。このようなガイド部306を作業服が通過すると、作業服2を搬送部304の中央へ移送するとともに、作業服2を前後方向に薄くする。
【0052】
操作入力部307は、図14(b)で示すように縦型ランドリモニタ300の前面に設けられており、各種操作が入力される。特に作業服として通常の作業服と厚手の火気服とがあり、何れかを選択する操作を行うことができる。
出力部308は、図14(b)で示すように縦型ランドリモニタ300の前面に設けられており、各種データを表示する。
【0053】
縦型ランドリモニタ300の内部には、図15(b),図16,図17で示すように、上流前側検出部309a、下流前側検出部309b、上流後側検出部309c、下流後側検出部309dが設けられている。上流前側検出部309aおよび下流前側検出部309bにより前側検出部を構成するものであり、縦型ランドリモニタ300の前側本体302内の前側内壁面302aに形成される。そして、上流後側検出部309cおよび下流後側検出部309dにより後側検出部を構成するものであり、縦型ランドリモニタ300の後側本体303内の後側内壁面303aに形成される。
【0054】
そして、図17で示すように、縦型ランドリモニタ300は、上下方向には複数のセンサ部を備える。ここで図示するのは上流後側検出部309cおよび下流後側検出部309dであるが、このような配置は、上流前側検出部309aおよび下流前側検出部309bについても同数が配置される。本形態では、例示的に上流後側検出部309cの上下方向の7個のセンサ部を、また、下流後側検出部309dの上下方向の6個のセンサ部を備える。そして図示していないが、上流前側検出部309aも上下方向の7個のセンサ部を、また、下流前側検出部309bも上下方向の6個のセンサ部を備える。これら上流前側検出部309aおよび下流前側検出部309bによる前側検出部と、上流後側検出部309cおよび下流後側検出部309dによる後側検出部と、を用いて搬送路304内へ搬送された作業服2の前後面に対して放射性物質による汚染(放射能汚染)の有無を検出する。
【0055】
次に収納部400について説明する。
収納部400は、搬送部200を移動する作業服2を仕分けした後に収納する。例えば、作業着2を大中小の三種類に分けて収納する。
【0056】
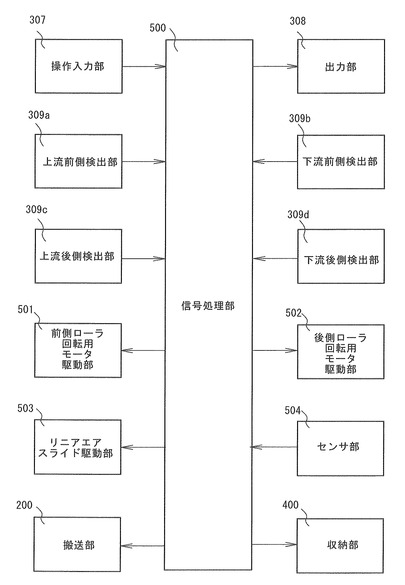
また、このランドリモニタシステム1の制御回路としては、図18で示すように、操作入力部307、出力部308、上流前側検出部309a、下流前側検出部309b、上流後側検出部309c、下流後側検出部309d、前側ローラ回転用モータ駆動部501、後側ローラ回転用モータ駆動部502、リニアエアスライド駆動部503,センサ部504、搬送部200、収納部400が、信号処理部500にそれぞれ接続されている。ランドリモニタシステム1はこのようなものである。
【0057】
続いてランドリモニタシステム1の運用について説明する。
このようなランドリモニタシステム1は、原子力発電所等の放射性物質取扱施設内にて用いられた作業服2が放射性物質によって汚染されているか否かを検査するために用いられる。ランドリモニタシステム1を用いる作業服2の管理について概略を説明する。まず、操作入力部307を通じてモニタリング開始を入力すると、信号処理部500は、搬送部200の図示しないチェーンを回転させて移動フック203が移動する状態にする。
【0058】
続いて、投入部100による投入動作を行う。最初の投入装置130は、移送部の押し出し部143が投入フック側にあってシャッタ137が閉じているためハンガー2を投入できないようになされている。さらにカバーが132透明であるため作業員は移送部の押し出し部143の位置が把握できており、不安なく待機することができる。
【0059】
信号処理部500がリニアエアスライド駆動部503を制御すると接続される電磁弁が開閉されてリニアエアスライドの移動部139aおよび押し出し部143が投入口133側へ下降し、シャッタ137が開く。シャッタ137が開いたため作業員はハンガー3のアーチ部3aを投入口133内へ投入する。ハンガー3のアーチ部3aが移送部の押し出し部143の前であって誘導ロッド136の上に載せられる。なお、投入口133は幅が狭くなっており、誤って2個のハンガー3を投入できないように配慮されている。
【0060】
センサ部504は、搬送部200の移動フック203の移動経路付近に設けられており、次の移動フック203が所定位置にあるか否かを検出し、移動フック203があることを検出したら信号処理部500へ検出信号を出力する。信号処理部500は、センサ部504からの信号を検出し、信号処理部500がリニアエアスライド駆動部503を制御すると接続される電磁弁が開閉されてリニアエアスライドの移動部139aおよび押し出し部143が投入フック135側へ上昇し、シャッタ137は付勢力により閉じるように移動する。これにより次の作業服が投入できないようになる。
【0061】
ハンガー3は押し出し部135に押されながら誘導ロッド136上を移動していき、ハンガー3が投入フック135側へ移送される。この際、移動部139aおよび押し出し部143が高速で移動すると投入フック135からハンガー3のアーチ部3aが外れて落下するおそれがあるため、リニアエアスライド139の移動部139aをやや低速で動作させている。このような制御はリニアエアスライド139内へのエアの流入出量を少なくすることで実現が可能である。このように移動部139aが投入口133側にあるときだけ、シャッタ137が開かれるため、誤投入は回避される。また、カバー132が透明であるため移動部139aの昇降も視認でき、やはり誤投入が防止される。
【0062】
なお、投入タイミングは、信号処理部500へ入力されるセンサ部504からの検出信号に応じて決定されるものとして説明したが、センサ部がなくても搬送部の移動フック203の搬送速度と配列ピッチから割り出して決定するなどの方法も可能であり、各種制御が可能である。
【0063】
投入フック135へ移送されたハンガー3は、図12で示すように、まず下降部135aにより下降する。続いて上昇部135bにより減速する。また、この際、ストッパ110に接触して前後方向や搬送方向への揺れが抑えられる。
この際、イオナイザ120がプラスイオンやマイナスイオンを噴射しているため、これらイオンが作業服2の静電気を中和してからグラウンドに流されることとなり、確実に除電される。このようにストッパ110に接した状態でアーチ部3aが谷部135cに位置するという投入位置にてハンガー3が待機している。
【0064】
そして図13で示すように搬送部200の移動フック203が移動して投入位置へ近づいてくる(図13(a))。まず、移動フック203がハンガー3の首部3bに接触する(図13(b))。さらに移動フック203が移動すると、アーチ部3aが上昇部135aを上昇しながら移動する(図13(c))。さらに移動フック203が移動するとアーチ部3aが投入フック135の先端から離れてアーチ部3aが移動フック203へ落下して投入が完了する(図13(d))。
作業服2が搬送部200へ送られた後、投入装置130では、移動部139aおよび押し出し部143が投入口133側まで下降する。このとき、投入口133ではシャッタ137が開けられ、次の作業服2が投入できるようになる。投入部100では以下同様な動作を繰り返して投入が行われることとなる。
【0065】
搬送部200の移動フック203がチェーンにより移動して、ハンガー3から吊り下げられた作業服2をハンガー3ごと移動させる。搬送部200から吊り下げられた状態の作業服2が縦型ランドリモニタ300内に搬送される。まず、図15(a),図16に示すようなガイド部306へ誘導される。この際、ガイド部306は、特に厚手の火気服のフード部分を前後方向に薄くするように機能する。ガイド部306は、搬送方向に対して上流側が広いため厚手の火気服でも確実にガイド部306内へ誘導される。そして、下流側へ行くにつれて狭く形成されているため、漸次薄くなっていく。ガイド部306は、図15(a)でも明らかなように、上側にのみ配置されているが、これは特に前後方向に厚い厚手の火気服のフード部分を予め薄くしておき、後段のローラ部で引っ掛かり等が生じにくくなるように配慮するものである。
【0066】
続いて作業服2は、ローラ部305を通過する。信号処理部500は、搬送部200の搬送速度とローラの外周面の線速度とが略一するように前側ローラ回転用モータ駆動部501および後側ローラ回転用モータ駆動部502を制御しており、図示しない前側ローラ回転用モータおよび後側ローラ回転用モータは、駆動軸を回転させている。
【0067】
ローラ部305は、検出部側へ作業服2を移動させるように回転しており、作業服2の搬入口304a付近での通過を補助する。同時に、前後で対をなす上流前側ローラ351aと上流後側ローラ352aという上流側のローラにより作業服2のフード頭頂から裾までを前後両側から圧縮する。これによりガイド部での圧縮からさらに薄くなるように圧縮する。続いて下流前側ローラ351bと下流後側ローラ352bという下流側の挟圧ローラにより作業服2のフード頭頂から裾までを前後両側からさらに薄くなるように圧縮する。
【0068】
この際、上流前側ローラ351aと上流後側ローラ352aとの外周面の線速度と、下流前側ローラ351bと下流後側ローラ352bとの外周面の線速度とを比較すると、半径が大きい下流前側ローラ351bと下流後側ローラ352bとの線速度が速くなる。従って、上流側から下流側へ僅かながら引っ張られることとなり、この点でも作業服2を薄くして凹凸面の均一化に寄与する。
【0069】
これにより前後方向の厚さを均一で薄くなるようにし、作業服2が検出部を通過する時に検出部の表面に擦れることなく通過する。また、作業服2から検出部までは凹凸を減らした一定の距離が見込めるようになり、検出精度も上昇する。
【0070】
そして信号処理部500は、これら前側検出部(上流前側検出部309aおよび下流前側検出部309b)と、後側検出部(上流後側検出部309cおよび下流後側検出部309d)から送信された検出信号に基づいて、搬送路304内を通過する作業服2の放射線汚染の有無を検出し、放射線汚染の有無を知らせる表示コマンドを出力部308へ送信し、出力部308の表示により汚染の有無が確認される。
【0071】
汚染がない場合には信号処理部500は、搬送部200の仕分け機構204を制御し、作業服2を三台ある収納部400まで搬送してサイズ別に集めて収納するように制御を行う。サイズについては、例えばハンガー3に取り付けられたICタグにより判別される。そして、仮に汚染がある場合には図示しない収納カゴ内へ作業服2を落下させて収納する。ランドリモニタシステム1はこのような動作を繰り返し行ってモニタリングを行うというものである。
【0072】
以上本発明のランドリモニタシステムについて説明した。本発明では以下のような(1)連続投入防止機能、(2)投入可能なタイミングを機械的に作る機能、(3)作業服横ぶれ防止機能、(4)静電気防止機能、を実現する。
【0073】
(1)連続投入防止機能
縦型ランドリモニタ300では、作業服を一着づつ、一定の間隔で投入する必要があり、二着を連続投入(同時投入)できないようにする必要があった。そこで、一枚の作業服を投入すると次の作業服が投入可能になるまで投入部のシャッタ137を閉めた状態を維持し、また、投入可能なタイミングになった時にシャッタ137を開ける機構を設けた。これにより、二着を連続投入(同時投入)できないように物理的に防止する。
【0074】
(2)投入可能なタイミングを機械的に作る機能
従来技術のランドリモニタでは、投入の度に作業員が、目で投入可能ランプを確認しながら作業を繰り返すため、注意力を維持する必要があり、作業員に負担が掛かるという問題があった。
そこで、一枚の作業服を投入すると次の作業服が投入可能になるまで投入部のシャッタ137を閉めた状態を維持し、また、投入可能なタイミングになった時にシャッタ137を開ける機構を設けた。これにより、投入できるタイミングを作業員に理解しやすい機械的な形式(シャッタの開閉や移送部の降下)で作業員へ通知するようにした。
【0075】
(3)測定服横ぶれ防止機能
縦型ランドリモニタは、ハンガーに掛けた状態で搬送するため、投入時の作業服の横揺れの発生などの問題があった。
そこで投入部100の下方にストッパ110を配置した。作業服投入時に作業服がストッパ110に触れることにより、横揺れを防止し、静止した状態で移動フック203へ投入する。これにより作業服2が落下することなく確実に投入することができる。
【0076】
(4)静電気防止機能
縦型ランドリモニタ300を用いる検出では、放射線検出器にとって有害な静電気を作業服に帯電させたくないという問題があった。
そこで、投入部100の下方に配置したストッパ110は、導電性の材料にて形成されており、電気的に接地した構成として、放射線検出器に有害な静電気を自動的に除去できるようにしている。作業服投入時に作業服2がストッパ110に触れることにより、静電気を除去する。ストッパ110は揺れ防止機能と静電気除去機能とを併有するため、省スペースの観点からも好ましい。
【産業上の利用可能性】
【0077】
本発明のランドリモニタシステムは、放射性物質取扱施設、例えば原子力発電所などに設置されるランドリモニタシステムに適用される。
【符号の説明】
【0078】
1:ランドリモニタシステム
100:投入部
110:ストッパ
120:イオナイザ
130:投入装置
131:装置本体
132:カバー
133:投入口
134:カラー表示部
135:投入フック
135a:下降部
135b:上昇部
135c:谷部
136:誘導ロッド
137:シャッタ
138:付勢ばね
139:リニアエアスライダ
139a:移動部
140:リニアガイド
141:支持部
142:従動子
143:押し出し部
143a:切り欠き部
143b:連結部
144:ガイド部
145:摺動片
146:中間部
200:搬送部
201:支持柱
202:搬送本体
203:移動フック
204:仕分け機構
300:縦型ランドリモニタ
301:ベース部
302:前側本体
302a:前側内壁面
303:後側本体
303a:後側内壁面
304:搬送路
304a:搬入口
304b:搬出口
305:ローラ部
351:前側ローラ
351a:上流前側ローラ
351b:下流前側ローラ
352:後側ローラ
352a:上流後側ローラ
352b:下流後側ローラ
353:巻き込み防止部
306:ガイド部
307:操作入力部
308:出力部
309:検出部
309a:上流前側検出部
309b:下流前側検出部
309c:上流後側検出部
309d:下流後側検出部
400:収納部
500:信号処理部
501:前側ローラ移動用モータ駆動部
502:後側ローラ移動用モータ駆動部
503:リニアエアスライド駆動部
504:センサ部
2:作業服
3:ハンガー
3a:アーチ部
3b:首部
3c:吊り下げ部
【技術分野】
【0001】
この発明は、原子力発電所など放射性物質取扱施設の管理区域から搬出される作業服の放射性物質による汚染(放射能汚染)の有無について検査するランドリモニタシステムに関する。
【背景技術】
【0002】
ランドリモニタシステムでは、作業服の投入に際し、服の袖や脚を折り曲げる必要があるなど手間を要するものであり、作業服の投入を簡単に行えるようにしたいという要請があった。
【0003】
このように作業服の投入に関するランドリモニタシステムに係る従来技術としては、例えば、特許文献1(特開2008−51503号公報,発明の名称:ランドリモニタ)に記載されたものが知られている。特許文献1のランドリモニタは、コンベア上を搬送されるランドリに対してモニタリングを行うランドリモニタであり、特に作業台の形状を工夫して服の脚を投入しやすくしたものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−51503号公報号公報(段落番号[0021],図2)
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年では縦型ランドリモニタの開発が進んでいる。この縦型ランドリモニタは、ハンガーに吊るした状態の作業服を搬送部が縦型ランドリモニタ内へ投入してモニタリングするというものである。縦型ランドリモニタでは高所にある搬送部にハンガーのアーチ部を引っ掛ける必要がある。例えば、大規模な放射線施設では一日に数百人分もの作業服をモニタリングすることもあり、作業服の投入作業は手間を要するものであった。
【0006】
特許文献1に記載した従来技術では作業服がコンベア上を搬送されるというものであり、線源から検出部までの距離が一定長さであるため、正確なモニタリングを可能としている。しかしながら、特許文献1のランドリモニタは、作業服のランドリモニタへの投入は、作業員が作業服の向きや折り畳み状態等を確認しながら手作業により投入するというものであり、また、次の作業服を投入するタイミングは、投入可能ランプを目で確認しながら投入を行うというものであった。従って、作業員の作業や判断が多数必要であり、作業員の負担は少なくないものであった。
これら従来技術では作業員が投入に手間を要するという問題があった。
【0007】
本発明は上記した問題に鑑みてなされたものであり、その目的は、ハンガーに掛けた状態の作業服を所定タイミングにて低所から高所へ移動させて搬送部が係止することで投入するようにし、作業員の作業や判断を少なくして作業員の手間を低減するランドリモニタシステムを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の請求項1に係る発明のランドリモニタシステムは、
作業服が掛けられたハンガーを吊す移動フックを移動させてハンガーとともに作業服を搬送する搬送部と、側面視凹字状に形成された側面の搬入口を通じて搬入された作業服に対して前側検出部および後側検出部からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有し、放射性物質取扱施設の管理区域から搬出される作業服について放射性物質による汚染の有無を検査するランドリモニタシステムであって、
作業服が掛けられたハンガーのアーチ部が投入される投入口と、投入されたハンガーのアーチ部を押送して作業服とともにハンガーを移送させる移送部と、移送されたハンガーのアーチ部を投入位置にて係止させる投入フックと、を有する投入装置を備え、投入フックに係止されるハンガーのアーチ部を搬送部の移動フックが移動させ、投入フックから離れたハンガーのアーチ部を移動フックに係止させて搬送部への投入が行なわれることを特徴とする。
【0009】
また、本発明の請求項2に係る発明のランドリモニタシステムは、
請求項1に記載のランドリモニタシステムにおいて、
前記投入装置は、投入口の開閉を行うシャッタを備え、シャッタを開くことにより、作業服の投入タイミングを作業員に通知することを特徴とする。
【0010】
また、本発明の請求項3に係る発明のランドリモニタシステムは、
請求項2に記載のランドリモニタシステムにおいて、
前記投入装置は、前記シャッタが閉まるように付勢する付勢部を備え、前記移送部が投入口側へ移送されたときに前記移送部が前記シャッタを押すと共に投入口が開かれ、前記移送部が投入フック側へ移送されたときにシャッタが閉まるように付勢部が付勢して投入口が閉じられることを特徴とする。
【0011】
また、本発明の請求項4に係る発明のランドリモニタシステムは、
請求項1〜請求項3の何れか一項に記載のランドリモニタシステムにおいて、
前記投入フックは、下側へ傾斜してアーチ部の下降とともにハンガーを下降させる下降部と、上側へ上昇してアーチ部の上昇とともにハンガーを制動停止させる上昇部と、下降部と上昇部との間に形成されておりアーチ部の停止とともにハンガーを投入位置に停止させる谷部と、を有し、前記投入フックは、搬送方向に対して所定角度傾斜することを特徴とする。
【0012】
また、本発明の請求項5に係る発明のランドリモニタシステムは、
請求項4に記載のランドリモニタシステムにおいて、
前記投入フックは、搬送方向に対して60°傾斜することを特徴とする。
【0013】
また、本発明の請求項6に係る発明のランドリモニタシステムは、
請求項1〜請求項5の何れか一項に記載のランドリモニタシステムにおいて、
前記投入フックを移動するハンガーの作業服に衝突して作業服の揺れを抑えるストッパを備えることを特徴とする。
【0014】
また、本発明の請求項7に係る発明のランドリモニタシステムは、
請求項6に記載のランドリモニタシステムにおいて、
前記ストッパは電気的に接地されており、作業服の静電気を除去することを特徴とする。
【0015】
また、本発明の請求項8に係る発明のランドリモニタシステムは、
請求項1〜請求項7の何れか一項に記載のランドリモニタシステムにおいて、
前記搬送部の移動フックは、投入フックの谷部にあるハンガーの首部に当接し、搬送方向へ移動しながらハンガーのアーチ部を上昇部先端まで引き寄せ、上昇部先端からアーチ部が離れるときにアーチ部の落下によりハンガーを引っ掛けることを特徴とする。
【0016】
また、本発明の請求項9に係る発明のランドリモニタシステムは、
請求項1〜請求項8の何れか一項に記載のランドリモニタシステムにおいて、
前記投入装置の投入口の周囲を覆うカラー表示部を備えることを特徴とする。
【0017】
また、本発明の請求項10に係る発明のランドリモニタシステムは、
請求項1〜請求項9の何れか一項に記載のランドリモニタシステムにおいて、
前記移送部の移動が見えるように一部または全部が透明なケースを備えることを特徴とする。
【発明の効果】
【0018】
以上説明したような本発明によれば、ハンガーに掛けた状態の作業服を所定タイミングにて低所から高所へ移動させて搬送部が係止することで投入するようにし、作業員の作業や判断を少なくして作業員の手間を低減するランドリモニタシステムを提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明を実施するための形態のランドリモニタシステムのシステム構成図である。
【図2】本発明を実施するための形態のランドリモニタシステムの平面図である。
【図3】投入部の説明図である。
【図4】投入部の説明図であり、図4(a)は特に投入装置の傾斜角度を説明する説明図、図4(b)はストッパがないときの投入部の説明図、図4(c)はストッパがあるときの投入部の説明図である。
【図5】投入装置の外観を説明する説明図であり、図5(a)は側面図、図5(b)は正面図である。
【図6】投入装置の内部構造の説明図であり、図6(a)は内部正面図、図6(b)はシャッタの平面図、図6(c)はA−A矢視図である。
【図7】シャッタと押し出し部とを透明にした投入装置の内部構造の説明図である。
【図8】投入装置の内部構造の説明図であり、図8(a)はシャッタを開くときの動作説明図、図8(b)はシャッタを閉じるときの動作説明図である。
【図9】移送部を投入フック側へ移動させたときの投入装置の内部構造の説明図である。
【図10】ハンガーの説明図である。
【図11】作業服を掛けたハンガーの説明図である。
【図12】ハンガーの移動を説明する説明図である。
【図13】投入部におけるハンガーの搬送部への投入を説明する説明図である。
【図14】縦型ランドリモニタの外観を説明する説明図であり、図14(a)は搬入口側の側面図、図14(b)は正面図である。
【図15】縦型ランドリモニタの内部を説明する説明図であり、図15(a)は搬入口側の側面図、図15(b)はB−B矢視図である。
【図16】縦型ランドリモニタのローラ部を説明する平面モデル図である。
【図17】縦型ランドリモニタのローラ部を説明する内部モデル図である。
【図18】ランドリモニタシステムの回路ブロックを説明する説明図である。
【発明を実施するための形態】
【0020】
続いて、本発明を実施するための形態について図を参照しつつ説明する。まず、ランドリモニタシステム1の全体について説明する。
ランドリモニタシステム1は、図1,図2で示すように、投入部100、搬送部200、縦型ランドリモニタ300、収納部400を備える。
【0021】
投入部100は、作業服2が掛けられたハンガー3(図11参照)をセットすると、搬送部200まで移動させて搬送部200の移動フック203へ、このハンガー3を投入する。
搬送部200は、作業服2が掛けられたハンガー3を移動フック203により搬送方向へ移動させる。
縦型ランドリモニタ300は、通過する作業服2の放射能汚染についてモニタリングを行う。
収納部400は、搬送部200を移動する作業服2を仕分け機構204によって仕分けした後に収納する。仕分け機構204は、作業服2が所定の収納位置まで搬送されてきた時点で、不図示のプッシャーによりハンガー3を搬送方向と直交する方向に押し出すようにして移動フック203に係止されたハンガー3を脱離させるものであり、本形態では、作業服2を大中小の三種類に分けて収納するようにしている。また、高汚染の作業着2は廃棄用のボックス(図示せず)へ落として回収する。ランドリモニタシステム1はこのようなものである。
【0022】
続いて各部の詳細について説明する。まず、本発明の特徴をなす投入部100について説明する。
投入部100は、図3,図4で示すように、ストッパ110、イオナイザ120、投入装置130を備えている。
【0023】
ストッパ110は、投入装置130の下側に搬送部200の搬送方向と平行をなすように配置されており、投入位置へ投入された作業服2に当接して揺れを防止する。ストッパ110がないと、図4(b)で示すような方向で作業服2およびハンガー3は安定するが、本発明のようにストッパ110があると、図4(c)で示すように、作業服2およびハンガー3が安定しようする回転力が常時働きつつ作業服2がストッパ110へ当接することとなり、作業服2がストッパ110へ当接する状態を維持する。
【0024】
また、ストッパ110は、電気的に接地されているため、作業服2に帯電する静電気を除電する。静電気は検出時のノイズ成分や故障の原因となるため、予め除去することで高い検出精度を維持する。そして先に説明したように作業服2およびハンガー3が安定しようする力が働いて作業服2がストッパ110に当接する状態を維持するため、確実に除電される。
【0025】
イオナイザ120は、プラスイオンやマイナスイオンを発生させる。これらイオンは作業服2の静電気を中和してからストッパ110を通じてグラウンドに流れるため、作業服2が確実に除電される。
【0026】
投入装置130は、図4(a)で示すように搬送装置200に対して傾斜した状態で配置される。傾斜角度は搬送方向に対して60°である。この傾斜によりストッパ110に作業服2を当接させている。この投入装置130は、図5,図6で示すように、装置本体131、カバー132、投入口133、カラー表示部134、投入フック135、誘導ロッド136、シャッタ137、付勢ばね138、リニアエアスライダ139、リニアガイド140、支持部141、従動子142、押し出し部143、ガイド部144、摺動片145を備えている。
【0027】
装置本体131は、メカベースとして機能する。
カバー132は、装置本体131へ固定された各部を覆う。このカバー132は透明な材料により形成されており、特にリニアエアスライダ139の移動部139aと押し出し部143とからなる移送部の昇降位置を目視により判別できるようにしている。
【0028】
投入口133は、カバー132に開けられている。投入口133にハンガー3のアーチ部3a(図10参照)を入れるとアーチ部3aは誘導ロッド136上へ載せられる。
カラー表示部134は、投入口133の周囲に設けられており、投入口133の存在を作業者に注意喚起する。また、シャッタ135と色を異ならせてシャッタ135の有無を喚起する。
【0029】
投入フック135は、棒状の部材を折り曲げて形成しており、さらに下降部135a、上昇部135b、谷部135cを備える(図12参照)。
下降部135aは、下側へ傾斜してアーチ部3aの下降とともにハンガー3を下降させる。
上昇部135bは、上側へ上昇してアーチ部3aの上昇とともにハンガー3の移動を停止させる。
谷部135cは、下降部135aと上昇部135bとの間に形成されておりアーチ部3aの停止とともにハンガー3が停止する。投入フック135は、図4(a)で示すように、上から見ると搬送方向に対して所定角度傾斜する。この傾斜角度は60°である。
【0030】
誘導ロッド136は、投入口133に投入されたハンガー3のアーチ部3aが係止されるロッドであり、投入口133から投入フック135まで連通している。
シャッタ137は、図6(b),図6(c)に示すように板体を折り曲げて形成した部材であって矢印方向に移動可能に設けられており、投入口133の開閉を行う。
付勢ばね138は、シャッタ137を投入フック135側へ付勢する引っ張りばねであり、シャッタ137は通常は図9で示すように閉じられている。
【0031】
リニアエアスライダ139は、移動部139aが投入口側と投入フック側との間を移動するようになされている。例えば、リニアエアスライド駆動部503(図18参照)により図示しない電磁弁が開閉するようになされており、電磁弁の開閉に応じてエアがリニアエアスライダ139内へ流入して移動部139aが移動する。
【0032】
リニアガイド140は、その移動部が中間部146(図7参照)を介してシャッタ137と機械的に連結されており、シャッタ137を移動部139aの移送方向と平行に移動させる。
支持部141は、誘導ロッド136が所定位置にあるように機械的に支持する。
従動子142は、シャッタ137の裏側に設けられており、図7で示すような位置にて押し出し部143と当接している。シャッタ137が投入口133側にあるときは、付勢ばね138の付勢力により従動子142と押し出し部143は当接している
【0033】
押し出し部143は、切り欠き部143a、連結部143b(図8参照)を備え、移動部139aに連結部143bが連結されて移動部139aとともに移動する。切り欠き部143aには誘導ロッド136が挿通されており、押し出し部143は誘導ロッド136にあるハンガー3のアーチ部3aを確実に押し出す。
【0034】
ガイド部144は、装置本体131の下側に設けられている立方体である。
摺動片145は、シャッタ137の下側に設けられておりガイド部144と接する。リニアガイド140で片持ち支持されているシャッタ137が移動するときにガイド部144が摺動片145をガイドしてシャッタ137の投入口133と対向する面が所定経路を通過するように位置決めする。
【0035】
続いて、投入装置130の動作について説明する。
リニアエアスライド139に流入するエアにより移動部139aは投入口133側と投入フック135側との間を移動する。移動部139aが図7で示すように投入口133側へ移動すると、図8(a)で示すように、押し出し部143が矢印a方向へ移動する。すると従動子142が矢印b方向へ押されるため、シャッタ137も付勢力に抗しつつ矢印c方向へ移動する。このとき、図6で示すように、シャッタ137が移動して投入口133を開く。
【0036】
また、移動部139aが図9で示すように投入フック135側へ移動すると、図8(b)で示すように、押し出し部143が矢印d方向へ移動する。すると従動子142が矢印e方向へ従動していき、シャッタ137も付勢力により矢印f方向へ移動する。このとき、図9で示すように、シャッタ137が投入口133を閉じる。そして所定距離押し出し部143が矢印d方向へ移動すると、従動子142から押し出し部143が離れてシャッタ137が投入口133を閉じた状態を維持する。
【0037】
続いて投入装置130への投入について説明する。ハンガー3は、図10で示すように、アーチ部3a、首部3b、吊り下げ部3cを含み、図11で示すように吊り下げ部3cに作業服2を吊り下げるものである。
【0038】
図12で示すように、ハンガー3を投入口へ投入すると、投入フック135側へ移送される。投入フック135ではまず、(1)のように下降部135aにアーチ部があると下降を開始し、上昇部135bにより制動されつつ作業服2もストッパ110に当たって揺れが防止され、最終的に谷部135cにて停止する。谷部135cは投入位置となっている。投入位置では作業服2はストッパ110に当たった状態で静止している。
【0039】
続いて、搬送部200への投入について説明する。図13(a)〜(d)ではそれぞれ上側に正面から見た図と下側に平面か見た図とが併記されている。図13(a)に示すように移動フック203が搬送方向を移動し、図13(b)に示すように移動フック203が首部3bに当接する。この際、ストッパ110の作用により揺れが発生することはない。図13(c)に示すようにアーチ部3aが投入フック135に沿って移動していき、最終的に図13(d)に示すようにアーチ部3aが移動フック203へ落下して搬送部200への投入が完了するというものである。投入部100は、このようなものである。
【0040】
続いて搬送部200について説明する。搬送部200は、図1で示すように、支持柱201、搬送本体202、移動フック203を備えている。
支持柱201は、搬送本体202を下側から支持する。
搬送本体202は、図示しないが輪状のチェーンが回転しており、少なくとも縦型ランドリモニタ300の搬送路304上に経路を採るようになされている。
移動フック203は、チェーンとともに移動するように構成されている。移動フック203も縦型ランドリモニタ300の搬送路304上を移動するように構成されている。搬送部200は、このようなものである。
【0041】
続いて縦型ランドリモニタ300について説明する。
縦型ランドリモニタ300は、図14で示すように、さらに、ベース部301、前側本体302、後側本体303、搬送路304、ローラ部305、ガイド部306、操作入力部307、出力部308を備える。
【0042】
ベース部301は、床面に配置され、前側本体302、後側本体303を移動可能に支持するため堅牢な構造体として構成されている。
前側本体302は、図16で示すように、前側検出部(上流前側検出部309a、下流前側検出部309b)が配置される。
後側本体303は、図16で示すように、後側検出部(上流後側検出部309c、下流後側検出部309d)が配置される。
【0043】
前側本体302は、図示しないが前後方向へ移動するように構成されている。
同様に後前側本体303は、前後方向へ移動するように構成されている。
前側本体302や後側本体303の移動により、前側検出部から後側検出部までの間隔を調整し、種類の違う作業服(通常の薄手の作業服や、火気を遮蔽するために厚くなっている火気服)の測定を可能としている。この際、搬送路の前後方向の中心位置と作業幅が通過する位置とが常に一致するように前側本体302や後側本体303が移動する。
【0044】
搬送路304は、図14(a)で示すように、ベース部301、前側本体302および後側本体303により形成されており、側面から見るとこの搬送路304があるため略凹字状に形成されている。そして、図16で示すように、上から見ると、上側が開口する搬送路304としている。縦型ランドリモニタ300は、このように側面視略凹字状の搬送路304を採用したため、搬送部200により上側から吊されている作業服2がそのまま通過できるようになされている。
【0045】
図16で示すように、搬送路304の上流側には搬入口304aが、また、搬送路304の下流側には搬出口304bがそれぞれ設けられている。
搬入口304aは、図16に示すように、縦型ランドリモニタ300内への入口である。
搬送路304は、搬入口304aに連通する空間であり、搬送路304の前後両側では作業服2の裏側と表側とに面するように上流前側検出部309a、下流前側検出部309b、上流後側検出部309c、下流後側検出部309dが配置されている。これら検出部の周囲には鉛シールド(鉄シールドなど含む)が施されており、前側本体302や後側本体303は重量物となっている。
搬出口304bは、搬送路304に連通しており、縦型ランドリモニタ300からの出口である。
これら搬入口304a、搬送路304、搬出口304bの順に作業服2が通過するようになされている。
【0046】
ローラ部305は、図15,図16,図17で示すように、前側ローラ351と後側ローラ352とを備える。ここに前側とは図1や図14(b)でも見えるような縦型ランドリモニタ300の正面側を指す。また、後側とは縦型ランドリモニタ300の背面側を指す。前側ローラ351は、さらに上流前側ローラ351aと下流前側ローラ351bとを備える。後側ローラ352は、さらに上流後側ローラ352aと下流後側ローラ352bとを備える。ここに上流側とは搬送方向に対して上流であり、下流側とは搬送方向に対して下流である。
【0047】
これら上流前側ローラ351a、下流前側ローラ351b、上流後側ローラ352a、下流後側ローラ352bは、図17に示すように、それぞれ一本の駆動軸に対して上下方向に多数の単位ローラが取り付けられて構成される。
ここで特に前後で一対のローラ間(上流前側ローラ351aと上流後側ローラ352aとの間、また、下流前側ローラ351bと下流後側ローラ352bとの間)に形成される作業服の通過幅の距離が検出部側へ近づくに連れて短くなるようにしている。このため、ローラ部305では、図16に示すように、上流前側ローラ351aと上流後側ローラ352aとの半径距離は、下流前側ローラ351bと下流後側ローラ352bとの半径距離よりも短くなるようにして、共同外接線は検出部側へ近づくに連れて縮幅するようにしている。このように一対のローラの半径が検出部側へ近づくに連れて長くなるようにしている。
【0048】
このようなローラ部305は、搬入口301aを通過しようとする作業服2を前後から挟む。ローラ部305で挟まれた作業服2は洗濯によりできた凹凸が整形されて厚さが均一になり、検出部309における安定した搬送と測定を可能とする。
【0049】
また、図16,図17で示すように、上下方向に隣あう二個の単位ローラの間には作業服の巻き込みを防止する金具である巻き込み防止部353が設けられている。この巻き込み防止部353は上下方向に全ての単位ローラ間に配置される。図16でも明らかなように、巻き込み防止部353よりもローラ部305の各ローラが搬送路304側へ突出して配置される。
【0050】
仮に巻き込み防止部353がないと、ローラに接触する作業服2が、そのまま接触を続けてローラに巻き込まれるおそれがあるが、この巻き込み防止部353の存在により、仮に作業服2が巻き込まれても巻き込み防止部353に接触して所定位置以上の巻き込みを遮って作業服2が搬送路へ復帰することとなり、作業服2が前側ローラ351と前側本体302との間や、後側ローラ352と後側本体303との間に巻き込まれるのを防いでいる。
【0051】
ガイド部306は、図16で示すように、上から視て略ハ字状に形成されており、搬送方向に対して上流側が広く、また、下流側が狭く形成されている。そしてローラ部305よりも上流側に配置されている。このようなガイド部306を作業服が通過すると、作業服2を搬送部304の中央へ移送するとともに、作業服2を前後方向に薄くする。
【0052】
操作入力部307は、図14(b)で示すように縦型ランドリモニタ300の前面に設けられており、各種操作が入力される。特に作業服として通常の作業服と厚手の火気服とがあり、何れかを選択する操作を行うことができる。
出力部308は、図14(b)で示すように縦型ランドリモニタ300の前面に設けられており、各種データを表示する。
【0053】
縦型ランドリモニタ300の内部には、図15(b),図16,図17で示すように、上流前側検出部309a、下流前側検出部309b、上流後側検出部309c、下流後側検出部309dが設けられている。上流前側検出部309aおよび下流前側検出部309bにより前側検出部を構成するものであり、縦型ランドリモニタ300の前側本体302内の前側内壁面302aに形成される。そして、上流後側検出部309cおよび下流後側検出部309dにより後側検出部を構成するものであり、縦型ランドリモニタ300の後側本体303内の後側内壁面303aに形成される。
【0054】
そして、図17で示すように、縦型ランドリモニタ300は、上下方向には複数のセンサ部を備える。ここで図示するのは上流後側検出部309cおよび下流後側検出部309dであるが、このような配置は、上流前側検出部309aおよび下流前側検出部309bについても同数が配置される。本形態では、例示的に上流後側検出部309cの上下方向の7個のセンサ部を、また、下流後側検出部309dの上下方向の6個のセンサ部を備える。そして図示していないが、上流前側検出部309aも上下方向の7個のセンサ部を、また、下流前側検出部309bも上下方向の6個のセンサ部を備える。これら上流前側検出部309aおよび下流前側検出部309bによる前側検出部と、上流後側検出部309cおよび下流後側検出部309dによる後側検出部と、を用いて搬送路304内へ搬送された作業服2の前後面に対して放射性物質による汚染(放射能汚染)の有無を検出する。
【0055】
次に収納部400について説明する。
収納部400は、搬送部200を移動する作業服2を仕分けした後に収納する。例えば、作業着2を大中小の三種類に分けて収納する。
【0056】
また、このランドリモニタシステム1の制御回路としては、図18で示すように、操作入力部307、出力部308、上流前側検出部309a、下流前側検出部309b、上流後側検出部309c、下流後側検出部309d、前側ローラ回転用モータ駆動部501、後側ローラ回転用モータ駆動部502、リニアエアスライド駆動部503,センサ部504、搬送部200、収納部400が、信号処理部500にそれぞれ接続されている。ランドリモニタシステム1はこのようなものである。
【0057】
続いてランドリモニタシステム1の運用について説明する。
このようなランドリモニタシステム1は、原子力発電所等の放射性物質取扱施設内にて用いられた作業服2が放射性物質によって汚染されているか否かを検査するために用いられる。ランドリモニタシステム1を用いる作業服2の管理について概略を説明する。まず、操作入力部307を通じてモニタリング開始を入力すると、信号処理部500は、搬送部200の図示しないチェーンを回転させて移動フック203が移動する状態にする。
【0058】
続いて、投入部100による投入動作を行う。最初の投入装置130は、移送部の押し出し部143が投入フック側にあってシャッタ137が閉じているためハンガー2を投入できないようになされている。さらにカバーが132透明であるため作業員は移送部の押し出し部143の位置が把握できており、不安なく待機することができる。
【0059】
信号処理部500がリニアエアスライド駆動部503を制御すると接続される電磁弁が開閉されてリニアエアスライドの移動部139aおよび押し出し部143が投入口133側へ下降し、シャッタ137が開く。シャッタ137が開いたため作業員はハンガー3のアーチ部3aを投入口133内へ投入する。ハンガー3のアーチ部3aが移送部の押し出し部143の前であって誘導ロッド136の上に載せられる。なお、投入口133は幅が狭くなっており、誤って2個のハンガー3を投入できないように配慮されている。
【0060】
センサ部504は、搬送部200の移動フック203の移動経路付近に設けられており、次の移動フック203が所定位置にあるか否かを検出し、移動フック203があることを検出したら信号処理部500へ検出信号を出力する。信号処理部500は、センサ部504からの信号を検出し、信号処理部500がリニアエアスライド駆動部503を制御すると接続される電磁弁が開閉されてリニアエアスライドの移動部139aおよび押し出し部143が投入フック135側へ上昇し、シャッタ137は付勢力により閉じるように移動する。これにより次の作業服が投入できないようになる。
【0061】
ハンガー3は押し出し部135に押されながら誘導ロッド136上を移動していき、ハンガー3が投入フック135側へ移送される。この際、移動部139aおよび押し出し部143が高速で移動すると投入フック135からハンガー3のアーチ部3aが外れて落下するおそれがあるため、リニアエアスライド139の移動部139aをやや低速で動作させている。このような制御はリニアエアスライド139内へのエアの流入出量を少なくすることで実現が可能である。このように移動部139aが投入口133側にあるときだけ、シャッタ137が開かれるため、誤投入は回避される。また、カバー132が透明であるため移動部139aの昇降も視認でき、やはり誤投入が防止される。
【0062】
なお、投入タイミングは、信号処理部500へ入力されるセンサ部504からの検出信号に応じて決定されるものとして説明したが、センサ部がなくても搬送部の移動フック203の搬送速度と配列ピッチから割り出して決定するなどの方法も可能であり、各種制御が可能である。
【0063】
投入フック135へ移送されたハンガー3は、図12で示すように、まず下降部135aにより下降する。続いて上昇部135bにより減速する。また、この際、ストッパ110に接触して前後方向や搬送方向への揺れが抑えられる。
この際、イオナイザ120がプラスイオンやマイナスイオンを噴射しているため、これらイオンが作業服2の静電気を中和してからグラウンドに流されることとなり、確実に除電される。このようにストッパ110に接した状態でアーチ部3aが谷部135cに位置するという投入位置にてハンガー3が待機している。
【0064】
そして図13で示すように搬送部200の移動フック203が移動して投入位置へ近づいてくる(図13(a))。まず、移動フック203がハンガー3の首部3bに接触する(図13(b))。さらに移動フック203が移動すると、アーチ部3aが上昇部135aを上昇しながら移動する(図13(c))。さらに移動フック203が移動するとアーチ部3aが投入フック135の先端から離れてアーチ部3aが移動フック203へ落下して投入が完了する(図13(d))。
作業服2が搬送部200へ送られた後、投入装置130では、移動部139aおよび押し出し部143が投入口133側まで下降する。このとき、投入口133ではシャッタ137が開けられ、次の作業服2が投入できるようになる。投入部100では以下同様な動作を繰り返して投入が行われることとなる。
【0065】
搬送部200の移動フック203がチェーンにより移動して、ハンガー3から吊り下げられた作業服2をハンガー3ごと移動させる。搬送部200から吊り下げられた状態の作業服2が縦型ランドリモニタ300内に搬送される。まず、図15(a),図16に示すようなガイド部306へ誘導される。この際、ガイド部306は、特に厚手の火気服のフード部分を前後方向に薄くするように機能する。ガイド部306は、搬送方向に対して上流側が広いため厚手の火気服でも確実にガイド部306内へ誘導される。そして、下流側へ行くにつれて狭く形成されているため、漸次薄くなっていく。ガイド部306は、図15(a)でも明らかなように、上側にのみ配置されているが、これは特に前後方向に厚い厚手の火気服のフード部分を予め薄くしておき、後段のローラ部で引っ掛かり等が生じにくくなるように配慮するものである。
【0066】
続いて作業服2は、ローラ部305を通過する。信号処理部500は、搬送部200の搬送速度とローラの外周面の線速度とが略一するように前側ローラ回転用モータ駆動部501および後側ローラ回転用モータ駆動部502を制御しており、図示しない前側ローラ回転用モータおよび後側ローラ回転用モータは、駆動軸を回転させている。
【0067】
ローラ部305は、検出部側へ作業服2を移動させるように回転しており、作業服2の搬入口304a付近での通過を補助する。同時に、前後で対をなす上流前側ローラ351aと上流後側ローラ352aという上流側のローラにより作業服2のフード頭頂から裾までを前後両側から圧縮する。これによりガイド部での圧縮からさらに薄くなるように圧縮する。続いて下流前側ローラ351bと下流後側ローラ352bという下流側の挟圧ローラにより作業服2のフード頭頂から裾までを前後両側からさらに薄くなるように圧縮する。
【0068】
この際、上流前側ローラ351aと上流後側ローラ352aとの外周面の線速度と、下流前側ローラ351bと下流後側ローラ352bとの外周面の線速度とを比較すると、半径が大きい下流前側ローラ351bと下流後側ローラ352bとの線速度が速くなる。従って、上流側から下流側へ僅かながら引っ張られることとなり、この点でも作業服2を薄くして凹凸面の均一化に寄与する。
【0069】
これにより前後方向の厚さを均一で薄くなるようにし、作業服2が検出部を通過する時に検出部の表面に擦れることなく通過する。また、作業服2から検出部までは凹凸を減らした一定の距離が見込めるようになり、検出精度も上昇する。
【0070】
そして信号処理部500は、これら前側検出部(上流前側検出部309aおよび下流前側検出部309b)と、後側検出部(上流後側検出部309cおよび下流後側検出部309d)から送信された検出信号に基づいて、搬送路304内を通過する作業服2の放射線汚染の有無を検出し、放射線汚染の有無を知らせる表示コマンドを出力部308へ送信し、出力部308の表示により汚染の有無が確認される。
【0071】
汚染がない場合には信号処理部500は、搬送部200の仕分け機構204を制御し、作業服2を三台ある収納部400まで搬送してサイズ別に集めて収納するように制御を行う。サイズについては、例えばハンガー3に取り付けられたICタグにより判別される。そして、仮に汚染がある場合には図示しない収納カゴ内へ作業服2を落下させて収納する。ランドリモニタシステム1はこのような動作を繰り返し行ってモニタリングを行うというものである。
【0072】
以上本発明のランドリモニタシステムについて説明した。本発明では以下のような(1)連続投入防止機能、(2)投入可能なタイミングを機械的に作る機能、(3)作業服横ぶれ防止機能、(4)静電気防止機能、を実現する。
【0073】
(1)連続投入防止機能
縦型ランドリモニタ300では、作業服を一着づつ、一定の間隔で投入する必要があり、二着を連続投入(同時投入)できないようにする必要があった。そこで、一枚の作業服を投入すると次の作業服が投入可能になるまで投入部のシャッタ137を閉めた状態を維持し、また、投入可能なタイミングになった時にシャッタ137を開ける機構を設けた。これにより、二着を連続投入(同時投入)できないように物理的に防止する。
【0074】
(2)投入可能なタイミングを機械的に作る機能
従来技術のランドリモニタでは、投入の度に作業員が、目で投入可能ランプを確認しながら作業を繰り返すため、注意力を維持する必要があり、作業員に負担が掛かるという問題があった。
そこで、一枚の作業服を投入すると次の作業服が投入可能になるまで投入部のシャッタ137を閉めた状態を維持し、また、投入可能なタイミングになった時にシャッタ137を開ける機構を設けた。これにより、投入できるタイミングを作業員に理解しやすい機械的な形式(シャッタの開閉や移送部の降下)で作業員へ通知するようにした。
【0075】
(3)測定服横ぶれ防止機能
縦型ランドリモニタは、ハンガーに掛けた状態で搬送するため、投入時の作業服の横揺れの発生などの問題があった。
そこで投入部100の下方にストッパ110を配置した。作業服投入時に作業服がストッパ110に触れることにより、横揺れを防止し、静止した状態で移動フック203へ投入する。これにより作業服2が落下することなく確実に投入することができる。
【0076】
(4)静電気防止機能
縦型ランドリモニタ300を用いる検出では、放射線検出器にとって有害な静電気を作業服に帯電させたくないという問題があった。
そこで、投入部100の下方に配置したストッパ110は、導電性の材料にて形成されており、電気的に接地した構成として、放射線検出器に有害な静電気を自動的に除去できるようにしている。作業服投入時に作業服2がストッパ110に触れることにより、静電気を除去する。ストッパ110は揺れ防止機能と静電気除去機能とを併有するため、省スペースの観点からも好ましい。
【産業上の利用可能性】
【0077】
本発明のランドリモニタシステムは、放射性物質取扱施設、例えば原子力発電所などに設置されるランドリモニタシステムに適用される。
【符号の説明】
【0078】
1:ランドリモニタシステム
100:投入部
110:ストッパ
120:イオナイザ
130:投入装置
131:装置本体
132:カバー
133:投入口
134:カラー表示部
135:投入フック
135a:下降部
135b:上昇部
135c:谷部
136:誘導ロッド
137:シャッタ
138:付勢ばね
139:リニアエアスライダ
139a:移動部
140:リニアガイド
141:支持部
142:従動子
143:押し出し部
143a:切り欠き部
143b:連結部
144:ガイド部
145:摺動片
146:中間部
200:搬送部
201:支持柱
202:搬送本体
203:移動フック
204:仕分け機構
300:縦型ランドリモニタ
301:ベース部
302:前側本体
302a:前側内壁面
303:後側本体
303a:後側内壁面
304:搬送路
304a:搬入口
304b:搬出口
305:ローラ部
351:前側ローラ
351a:上流前側ローラ
351b:下流前側ローラ
352:後側ローラ
352a:上流後側ローラ
352b:下流後側ローラ
353:巻き込み防止部
306:ガイド部
307:操作入力部
308:出力部
309:検出部
309a:上流前側検出部
309b:下流前側検出部
309c:上流後側検出部
309d:下流後側検出部
400:収納部
500:信号処理部
501:前側ローラ移動用モータ駆動部
502:後側ローラ移動用モータ駆動部
503:リニアエアスライド駆動部
504:センサ部
2:作業服
3:ハンガー
3a:アーチ部
3b:首部
3c:吊り下げ部
【特許請求の範囲】
【請求項1】
作業服が掛けられたハンガーを吊す移動フックを移動させてハンガーとともに作業服を搬送する搬送部と、側面視凹字状に形成された側面の搬入口を通じて搬入された作業服に対して前側検出部および後側検出部からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有し、放射性物質取扱施設の管理区域から搬出される作業服について放射性物質による汚染の有無を検査するランドリモニタシステムであって、
作業服が掛けられたハンガーのアーチ部が投入される投入口と、投入されたハンガーのアーチ部を押送して作業服とともにハンガーを移送させる移送部と、移送されたハンガーのアーチ部を投入位置にて係止させる投入フックと、を有する投入装置を備え、投入フックに係止されるハンガーのアーチ部を搬送部の移動フックが移動させ、投入フックから離れたハンガーのアーチ部を移動フックに係止させて搬送部への投入が行なわれることを特徴とするランドリモニタシステム。
【請求項2】
請求項1に記載のランドリモニタシステムにおいて、
前記投入装置は、投入口の開閉を行うシャッタを備え、シャッタを開くことにより、作業服の投入タイミングを作業員に通知することを特徴とするランドリモニタシステム。
【請求項3】
請求項2に記載のランドリモニタシステムにおいて、
前記投入装置は、前記シャッタが閉まるように付勢する付勢部を備え、前記移送部が投入口側へ移送されたときに前記移送部が前記シャッタを押すと共に投入口が開かれ、前記移送部が投入フック側へ移送されたときにシャッタが閉まるように付勢部が付勢して投入口が閉じられることを特徴とするランドリモニタシステム。
【請求項4】
請求項1〜請求項3の何れか一項に記載のランドリモニタシステムにおいて、
前記投入フックは、下側へ傾斜してアーチ部の下降とともにハンガーを下降させる下降部と、上側へ上昇してアーチ部の上昇とともにハンガーを制動停止させる上昇部と、下降部と上昇部との間に形成されておりアーチ部の停止とともにハンガーを投入位置に停止させる谷部と、を有し、前記投入フックは、搬送方向に対して所定角度傾斜することを特徴とするランドリモニタシステム。
【請求項5】
請求項4に記載のランドリモニタシステムにおいて、
前記投入フックは、搬送方向に対して60°傾斜することを特徴とするランドリモニタシステム。
【請求項6】
請求項1〜請求項5の何れか一項に記載のランドリモニタシステムにおいて、
前記投入フックを移動するハンガーの作業服に衝突して作業服の揺れを抑えるストッパを備えることを特徴とするランドリモニタシステム。
【請求項7】
請求項6に記載のランドリモニタシステムにおいて、
前記ストッパは電気的に接地されており、作業服の静電気を除去することを特徴とするランドリモニタシステム。
【請求項8】
請求項1〜請求項7の何れか一項に記載のランドリモニタシステムにおいて、
前記搬送部の移動フックは、投入フックの谷部にあるハンガーの首部に当接し、搬送方向へ移動しながらハンガーのアーチ部を上昇部先端まで引き寄せ、上昇部先端からアーチ部が離れるときにアーチ部の落下によりハンガーを引っ掛けることを特徴とするランドリモニタシステム。
【請求項9】
請求項1〜請求項8の何れか一項に記載のランドリモニタシステムにおいて、
前記投入装置の投入口の周囲を覆うカラー表示部を備えることを特徴とするランドリモニタシステム。
【請求項10】
請求項1〜請求項9の何れか一項に記載のランドリモニタシステムにおいて、
前記移送部の移動が見えるように一部または全部が透明なケースを備えることを特徴とするランドリモニタシステム。
【請求項1】
作業服が掛けられたハンガーを吊す移動フックを移動させてハンガーとともに作業服を搬送する搬送部と、側面視凹字状に形成された側面の搬入口を通じて搬入された作業服に対して前側検出部および後側検出部からなる検出部により作業服の表裏のモニタリングを行って汚染の有無を検出する縦型ランドリモニタと、を有し、放射性物質取扱施設の管理区域から搬出される作業服について放射性物質による汚染の有無を検査するランドリモニタシステムであって、
作業服が掛けられたハンガーのアーチ部が投入される投入口と、投入されたハンガーのアーチ部を押送して作業服とともにハンガーを移送させる移送部と、移送されたハンガーのアーチ部を投入位置にて係止させる投入フックと、を有する投入装置を備え、投入フックに係止されるハンガーのアーチ部を搬送部の移動フックが移動させ、投入フックから離れたハンガーのアーチ部を移動フックに係止させて搬送部への投入が行なわれることを特徴とするランドリモニタシステム。
【請求項2】
請求項1に記載のランドリモニタシステムにおいて、
前記投入装置は、投入口の開閉を行うシャッタを備え、シャッタを開くことにより、作業服の投入タイミングを作業員に通知することを特徴とするランドリモニタシステム。
【請求項3】
請求項2に記載のランドリモニタシステムにおいて、
前記投入装置は、前記シャッタが閉まるように付勢する付勢部を備え、前記移送部が投入口側へ移送されたときに前記移送部が前記シャッタを押すと共に投入口が開かれ、前記移送部が投入フック側へ移送されたときにシャッタが閉まるように付勢部が付勢して投入口が閉じられることを特徴とするランドリモニタシステム。
【請求項4】
請求項1〜請求項3の何れか一項に記載のランドリモニタシステムにおいて、
前記投入フックは、下側へ傾斜してアーチ部の下降とともにハンガーを下降させる下降部と、上側へ上昇してアーチ部の上昇とともにハンガーを制動停止させる上昇部と、下降部と上昇部との間に形成されておりアーチ部の停止とともにハンガーを投入位置に停止させる谷部と、を有し、前記投入フックは、搬送方向に対して所定角度傾斜することを特徴とするランドリモニタシステム。
【請求項5】
請求項4に記載のランドリモニタシステムにおいて、
前記投入フックは、搬送方向に対して60°傾斜することを特徴とするランドリモニタシステム。
【請求項6】
請求項1〜請求項5の何れか一項に記載のランドリモニタシステムにおいて、
前記投入フックを移動するハンガーの作業服に衝突して作業服の揺れを抑えるストッパを備えることを特徴とするランドリモニタシステム。
【請求項7】
請求項6に記載のランドリモニタシステムにおいて、
前記ストッパは電気的に接地されており、作業服の静電気を除去することを特徴とするランドリモニタシステム。
【請求項8】
請求項1〜請求項7の何れか一項に記載のランドリモニタシステムにおいて、
前記搬送部の移動フックは、投入フックの谷部にあるハンガーの首部に当接し、搬送方向へ移動しながらハンガーのアーチ部を上昇部先端まで引き寄せ、上昇部先端からアーチ部が離れるときにアーチ部の落下によりハンガーを引っ掛けることを特徴とするランドリモニタシステム。
【請求項9】
請求項1〜請求項8の何れか一項に記載のランドリモニタシステムにおいて、
前記投入装置の投入口の周囲を覆うカラー表示部を備えることを特徴とするランドリモニタシステム。
【請求項10】
請求項1〜請求項9の何れか一項に記載のランドリモニタシステムにおいて、
前記移送部の移動が見えるように一部または全部が透明なケースを備えることを特徴とするランドリモニタシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−232151(P2011−232151A)
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願番号】特願2010−102121(P2010−102121)
【出願日】平成22年4月27日(2010.4.27)
【出願人】(000005234)富士電機株式会社 (3,146)
【Fターム(参考)】
【公開日】平成23年11月17日(2011.11.17)
【国際特許分類】
【出願日】平成22年4月27日(2010.4.27)
【出願人】(000005234)富士電機株式会社 (3,146)
【Fターム(参考)】
[ Back to top ]