
リスク回避支援装置
【課題】自車両と周囲車両との衝突を確実に回避することができるリスク回避支援装置を提供する。
【解決手段】 リスク回避支援装置のECUは、自車両と先行車両及び後続車両との車間距離、先行車両及び後続車両の走行挙動(ふらつき等)に基づいて、自車両が先行車両に追突するリスク(前衝突リスク)と自車両が後続車両に追突されるリスク(後衝突リスク)を演算し、これらの衝突リスクが等しくなるように、先行車両及び後続車両に対する自車両の車間位置を求め、これに応じてアクセル制御部8及びブレーキ制御部9を制御する。また、ECUは、先行車両の走行挙動に基づいて、自車両が先行車両を追い越すリスク(追越リスク)を演算し、この追越リスクが前衝突リスクよりも低いときに、自車両が先行車両を追い越すようにアクセル制御部8及びステアリング制御部10を制御する。
【解決手段】 リスク回避支援装置のECUは、自車両と先行車両及び後続車両との車間距離、先行車両及び後続車両の走行挙動(ふらつき等)に基づいて、自車両が先行車両に追突するリスク(前衝突リスク)と自車両が後続車両に追突されるリスク(後衝突リスク)を演算し、これらの衝突リスクが等しくなるように、先行車両及び後続車両に対する自車両の車間位置を求め、これに応じてアクセル制御部8及びブレーキ制御部9を制御する。また、ECUは、先行車両の走行挙動に基づいて、自車両が先行車両を追い越すリスク(追越リスク)を演算し、この追越リスクが前衝突リスクよりも低いときに、自車両が先行車両を追い越すようにアクセル制御部8及びステアリング制御部10を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両と周囲車両との衝突等のリスクを回避するための支援を行うリスク回避支援装置に関するものである。
【背景技術】
【0002】
従来のリスク回避支援装置としては、例えば特許文献1に記載されているように、自車両に接近する後続車両を検知し、自車両と後続車両との衝突を避けるように自車両の走行をアシスト制御するようにしたものが知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−182198号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術においては、自車両と後続車両との接近距離のみを考慮して、自車両と後続車両との衝突を回避するような制御を行っている。しかし、自車両と自車両の周囲を走行する他車両(周囲車両)とが衝突するリスクは、自車両と周囲車両との接近距離だけでは決められない場合がある。
【0005】
本発明の目的は、自車両と周囲車両との衝突を確実に回避することができるリスク回避支援装置を提供することである。
【課題を解決するための手段】
【0006】
本発明のリスク回避支援装置は、自車両と自車両の周囲を走行する周囲車両との距離を検出する距離検出手段と、周囲車両の走行挙動を検出する挙動検出手段と、自車両と周囲車両との距離及び周囲車両の走行挙動に基づいて、自車両と周囲車両とが衝突するリスクを算出する衝突リスク算出手段と、自車両と周囲車両とが衝突するリスクが最小となるように周囲車両に対する自車両の位置を制御する位置制御手段とを備えることを特徴とするものである。
【0007】
このように本発明のリスク回避支援装置においては、自車両と周囲車両との距離及び周囲車両の走行挙動(ふらつき等)を検出し、これらの検出情報に基づいて、自車両と周囲車両とが衝突するリスク(衝突リスク)を算出することにより、自車両と周囲車両との距離だけでなく、周囲車両の走行挙動も考慮した適切な衝突リスクが得られる。そして、そのような衝突リスクが最小となるように周囲車両に対する自車両の位置を制御することにより、自車両と周囲車両とが適切な位置関係に保たれる。これにより、自車両と周囲車両との衝突が回避される可能性が十分高くなる。
【0008】
好ましくは、周囲車両は、自車両の前方を走行する前方車両と、自車両の後方を走行する後方車両とを含み、位置制御手段は、自車両と前方車両とが衝突するリスクと、自車両と後方車両とが衝突するリスクとが等しくなるように、前方車両及び後方車両に対する自車両の車間位置を制御する。この場合には、自車両と前方車両及び後方車両との車間距離が確保されるため、自車両と前方車両及び後方車両との衝突が回避される可能性が十分高くなる。
【0009】
このとき、前方車両の走行挙動に基づいて、自車両が前方車両を追い越すリスクを算出する追越リスク算出手段と、自車両が前方車両を追い越すリスクが、自車両と前方車両とが衝突するリスクよりも低いときに、自車両が前方車両を追い越すように自車両を制御する追越制御手段とを更に備えることが好ましい。このように自車両が前方車両を追い越すリスク(追越リスク)が衝突リスクよりも低いときには、自車両が前方車両を追い越すことにより、自車両と前方車両及び後方車両との衝突が回避される可能性が一層高くなる。
【発明の効果】
【0010】
本発明によれば、自車両と周囲車両との距離に加えて周囲車両の走行挙動を考慮するので、自車両と周囲車両との衝突を確実に回避することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係わるリスク回避支援装置の一実施形態の構成を示すブロック図である。
【図2】図1に示したECUにより実行される処理手順の詳細を示すフローチャートである。
【図3】自車両の周囲にふらつきの大きい先行車両及び後続車両が走行している場合における自車両の走行動作を示す図である。
【発明を実施するための形態】
【0012】
以下、本発明に係わるリスク回避支援装置の好適な実施形態について、図面を参照して詳細に説明する。
【0013】
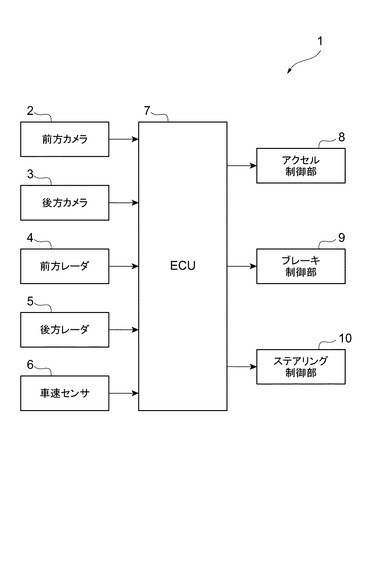
図1は、本発明に係わるリスク回避支援装置の一実施形態の構成を示すブロック図である。同図において、本実施形態のリスク回避支援装置1は、前方カメラ2と、後方カメラ3と、前方レーダ4と、後方レーダ5と、車速センサ6と、ECU(Electronic Control Unit)7と、アクセル制御部8と、ブレーキ制御部9と、ステアリング制御部10とを備えている。
【0014】
前方カメラ2は、自車両の前方を走行する前方車両(先行車両)を撮像する。後方カメラ3は、自車両の後方を走行する後方車両(後続車両)を撮像する。前方レーダ4は、ミリ波レーダ等を先行車両に照射し、その反射波を受けることで、自車両から先行車両までの距離、自車両に対する先行車両の相対速度を測定する。後方レーダ5は、ミリ波レーダ等を後続車両に照射し、その反射波を受けることで、自車両から後続車両までの距離、自車両に対する後続車両の相対速度を測定する。車速センサ6は、自車両の走行速度を計測する。
【0015】
アクセル制御部8は、自車両のアクセルを自動的に制御する。ブレーキ制御部9は、自車両のブレーキを自動的に制御する。ステアリング制御部10は、自車両のステアリング(操舵)を自動的に制御する。
【0016】
ECU7は、CPU、ROMやRAM等のメモリ、入出力回路等により構成されている。ECU7は、前方カメラ2及び後方カメラ3の撮像画像、前方レーダ4及び後方レーダ5の測定データ、車速センサ6の計測値を入力し、所定の処理を行い、アクセル制御部8、ブレーキ制御部9及びステアリング制御部10を制御する。
【0017】
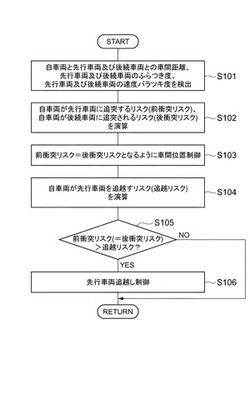
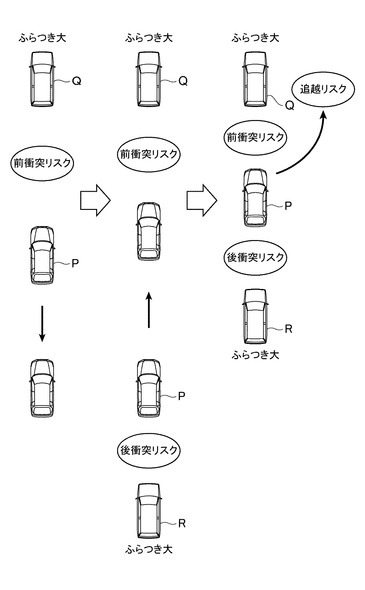
図2は、ECU7により実行される処理手順の詳細を示すフローチャートである。同図において、まず前方カメラ2及び後方カメラ3の撮像画像、前方レーダ4及び後方レーダ5の測定データ、車速センサ6の計測値に基づいて、自車両と先行車両及び後続車両との車間距離、先行車両及び後続車両の横方向(左右方向)のふらつき度、先行車両及び後続車両の速度バラツキ度を求める(手順S101)。
【0018】
具体的には、前方レーダ4の測定データに基づいて自車両と先行車両との車間距離を求めると共に、後方レーダ5の測定データに基づいて自車両と後続車両との車間距離を求める。また、前方カメラ2の撮像画像に基づいて先行車両の横方向のふらつき度を求めると共に、後方カメラ3の撮像画像に基づいて後続車両の横方向のふらつき度を求める。さらに、前方レーダ4の測定データ及び車速センサ6の計測値に基づいて先行車両の速度バラツキ度を求めると共に、後方レーダ5の測定データ及び車速センサ6の計測値に基づいて後続車両の速度バラツキ度を求める。
【0019】
続いて、自車両と先行車両との車間距離、先行車両の横方向のふらつき度及び速度バラツキ度に基づいて、自車両が先行車両に追突するリスク(前衝突リスク)を演算すると共に、自車両と後続車両との車間距離、後続車両の横方向のふらつき度及び速度バラツキ度に基づいて、自車両が後続車両に追突されるリスク(後衝突リスク)を演算する(手順S102)。
【0020】
例えば前衝突リスクは、自車両と先行車両との車間距離に応じたリスクと、先行車両の横方向のふらつき度に応じたリスクと、先行車両の速度バラツキ度に応じたリスクとの合計値から得ることができる。このとき、先行車両の横方向のふらつき度に応じたリスクと、先行車両の速度バラツキ度に応じたリスクとの割合(比率)を設定しても良い。また、自車両における衝突回避の対応度(例えば自車両のドライバの覚醒状態等)も考慮して、前衝突リスクを計算しても良い。
【0021】
同様に、後衝突リスクは、自車両と後続車両との車間距離に応じたリスクと、後続車両の横方向のふらつき度に応じたリスクと、後続車両の速度バラツキ度に応じたリスクとの合計値から得ることができる。この場合にも、後続車両の横方向のふらつき度に応じたリスクと、後続車両の速度バラツキ度に応じたリスクとの割合を設定しても良い。
【0022】
続いて、前衝突リスクと後衝突リスクとが等しくなることで両者の衝突リスクが最小となるような、先行車両及び後続車両に対する自車両の車間位置を求め、自車両が当該車間位置に来るようにアクセル制御部8及びブレーキ制御部9を制御する(手順S103)。
【0023】
具体的には、手順S102で前衝突リスク及び後衝突リスクを計算したときに、例えば前衝突リスクが後衝突リスクよりも高い場合には、自車両と先行車両との車間距離が自車両と後続車両との車間距離よりも長くなるように、アクセル制御部8及びブレーキ制御部9を制御する。
【0024】
続いて、先行車両の横方向のふらつき度及び先行車両の速度バラツキ度に基づいて、自車両が先行車両を追い越すリスク(追越リスク)を演算する(手順S104)。このとき、先行車両の速度バラツキ度に応じたリスクに対して先行車両の横方向のふらつき度に応じたリスクの比率を十分高くして、追越リスクを計算する。つまり、追越リスクの演算では、前衝突リスク及び後衝突リスクの演算と比較して、先行車両の横方向のふらつき度を重視する。
【0025】
続いて、追越リスクが前衝突リスク(=後衝突リスク)よりも低いかどうかを判断する(手順S105)。追越リスクが前衝突リスクよりも低いと判断されたときは、自車両が先行車両を追い越すようにアクセル制御部8及びステアリング制御部10を制御する(手順S106)。
【0026】
以上において、前方レーダ4、後方レーダ5、ECU7の上記手順S101は、自車両と自車両の周囲を走行する周囲車両との距離を検出する距離検出手段を構成する。前方カメラ2、後方カメラ3、前方レーダ4、後方レーダ5、車速センサ6、ECU7の上記手順S101は、周囲車両の走行挙動を検出する挙動検出手段を構成する。ECU7の上記手順S102は、自車両と周囲車両との距離及び周囲車両の走行挙動に基づいて、自車両と周囲車両とが衝突するリスクを算出する衝突リスク算出手段を構成する。ECU7の上記手順S103、アクセル制御部8、ブレーキ制御部9は、自車両と周囲車両とが衝突するリスクが最小となるように周囲車両に対する自車両の位置を制御する位置制御手段を構成する。
【0027】
また、ECU7の上記手順S104は、前方車両の走行挙動に基づいて、自車両が前方車両を追い越すリスクを算出する追越リスク算出手段を構成する。ECU7の上記手順S105,S106は、自車両が前方車両を追い越すリスクが、自車両と前方車両とが衝突するリスクよりも低いときに、自車両が前方車両を追い越すように自車両を制御する追越制御手段を構成する。
【0028】
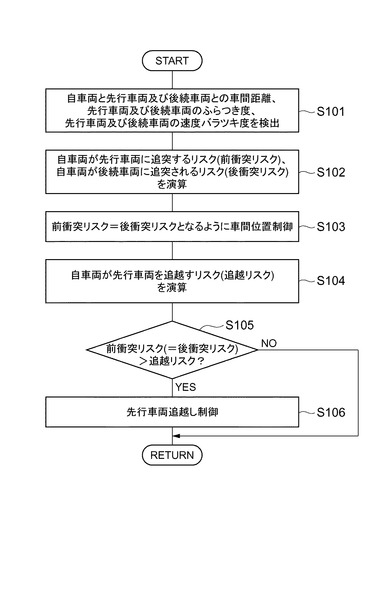
ここで、例えば図3に示すように、先行車両Qの横方向のふらつきが大きいために、前衝突リスクが高くなったときは、自車両Pと先行車両Qとの車間距離を長くとるべく自車両Pを減速させる(左図参照)ことで、前衝突リスクが低くなる。
【0029】
その後、横方向のふらつきが大きい後続車両Rが自車両Pに接近すると、後衝突リスクが高くなるため、自車両Pと後続車両Rとの車間距離を長くとるべく自車両Pを加速させる(中央図参照)。すると、自車両Pと先行車両Qとの車間距離が短くなるため、前衝突リスクが高くなってしまう。従って、最終的に前衝突リスクと後衝突リスクとが等しくなるように、自車両Pを加減速させる。
【0030】
その状態で、追越リスクを前衝突リスク(=後衝突リスク)と比較し、追越リスクが前衝突リスクよりも低いときは、自車両Pを加速させつつステアリング操作を行い、先行車両Qを追い越す(右図参照)。
【0031】
以上のように本実施形態にあっては、自車両と先行車両及び後続車両との車間距離を検出するだけでなく、先行車両及び後続車両の横方向のふらつき度や速度バラツキ度を検出し、これらの検出データに基づいて前衝突リスク、後衝突リスク及び追越リスクを演算するようにしたので、先行車両及び後続車両の走行挙動を考慮した適切な前衝突リスク、後衝突リスク及び追越リスクが得られる。そして、前衝突リスク及び後衝突リスクが等しくなるように先行車両及び後続車両に対する自車両の車間位置を制御するので、先行車両及び後続車両と自車両との位置関係が良好になる。また、追越リスクが前衝突リスクよりも小さいときに、自車両が先行車両を追い越すように自車両を制御するので、自車両による先行車両の追い越しが効果的に行われる。以上により、例えば先行車両及び後続車両が横方向にふらついて走行している場合でも、自車両と前方車両及び後続車両との衝突を確実に回避することができる。
【符号の説明】
【0032】
1…リスク回避支援装置、2…前方カメラ(挙動検出手段)、3…後方カメラ(挙動検出手段)、4…前方レーダ(距離検出手段、挙動検出手段)、5…後方レーダ(距離検出手段、挙動検出手段)、6…車速センサ(挙動検出手段)、7…ECU(距離検出手段、挙動検出手段、衝突リスク算出手段、位置制御手段、追越リスク算出手段、追越制御手段)、8…アクセル制御部(位置制御手段、追越制御手段)、9…ブレーキ制御部(位置制御手段)、10…ステアリング制御部(追越制御手段)。
【技術分野】
【0001】
本発明は、自車両と周囲車両との衝突等のリスクを回避するための支援を行うリスク回避支援装置に関するものである。
【背景技術】
【0002】
従来のリスク回避支援装置としては、例えば特許文献1に記載されているように、自車両に接近する後続車両を検知し、自車両と後続車両との衝突を避けるように自車両の走行をアシスト制御するようにしたものが知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−182198号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術においては、自車両と後続車両との接近距離のみを考慮して、自車両と後続車両との衝突を回避するような制御を行っている。しかし、自車両と自車両の周囲を走行する他車両(周囲車両)とが衝突するリスクは、自車両と周囲車両との接近距離だけでは決められない場合がある。
【0005】
本発明の目的は、自車両と周囲車両との衝突を確実に回避することができるリスク回避支援装置を提供することである。
【課題を解決するための手段】
【0006】
本発明のリスク回避支援装置は、自車両と自車両の周囲を走行する周囲車両との距離を検出する距離検出手段と、周囲車両の走行挙動を検出する挙動検出手段と、自車両と周囲車両との距離及び周囲車両の走行挙動に基づいて、自車両と周囲車両とが衝突するリスクを算出する衝突リスク算出手段と、自車両と周囲車両とが衝突するリスクが最小となるように周囲車両に対する自車両の位置を制御する位置制御手段とを備えることを特徴とするものである。
【0007】
このように本発明のリスク回避支援装置においては、自車両と周囲車両との距離及び周囲車両の走行挙動(ふらつき等)を検出し、これらの検出情報に基づいて、自車両と周囲車両とが衝突するリスク(衝突リスク)を算出することにより、自車両と周囲車両との距離だけでなく、周囲車両の走行挙動も考慮した適切な衝突リスクが得られる。そして、そのような衝突リスクが最小となるように周囲車両に対する自車両の位置を制御することにより、自車両と周囲車両とが適切な位置関係に保たれる。これにより、自車両と周囲車両との衝突が回避される可能性が十分高くなる。
【0008】
好ましくは、周囲車両は、自車両の前方を走行する前方車両と、自車両の後方を走行する後方車両とを含み、位置制御手段は、自車両と前方車両とが衝突するリスクと、自車両と後方車両とが衝突するリスクとが等しくなるように、前方車両及び後方車両に対する自車両の車間位置を制御する。この場合には、自車両と前方車両及び後方車両との車間距離が確保されるため、自車両と前方車両及び後方車両との衝突が回避される可能性が十分高くなる。
【0009】
このとき、前方車両の走行挙動に基づいて、自車両が前方車両を追い越すリスクを算出する追越リスク算出手段と、自車両が前方車両を追い越すリスクが、自車両と前方車両とが衝突するリスクよりも低いときに、自車両が前方車両を追い越すように自車両を制御する追越制御手段とを更に備えることが好ましい。このように自車両が前方車両を追い越すリスク(追越リスク)が衝突リスクよりも低いときには、自車両が前方車両を追い越すことにより、自車両と前方車両及び後方車両との衝突が回避される可能性が一層高くなる。
【発明の効果】
【0010】
本発明によれば、自車両と周囲車両との距離に加えて周囲車両の走行挙動を考慮するので、自車両と周囲車両との衝突を確実に回避することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係わるリスク回避支援装置の一実施形態の構成を示すブロック図である。
【図2】図1に示したECUにより実行される処理手順の詳細を示すフローチャートである。
【図3】自車両の周囲にふらつきの大きい先行車両及び後続車両が走行している場合における自車両の走行動作を示す図である。
【発明を実施するための形態】
【0012】
以下、本発明に係わるリスク回避支援装置の好適な実施形態について、図面を参照して詳細に説明する。
【0013】
図1は、本発明に係わるリスク回避支援装置の一実施形態の構成を示すブロック図である。同図において、本実施形態のリスク回避支援装置1は、前方カメラ2と、後方カメラ3と、前方レーダ4と、後方レーダ5と、車速センサ6と、ECU(Electronic Control Unit)7と、アクセル制御部8と、ブレーキ制御部9と、ステアリング制御部10とを備えている。
【0014】
前方カメラ2は、自車両の前方を走行する前方車両(先行車両)を撮像する。後方カメラ3は、自車両の後方を走行する後方車両(後続車両)を撮像する。前方レーダ4は、ミリ波レーダ等を先行車両に照射し、その反射波を受けることで、自車両から先行車両までの距離、自車両に対する先行車両の相対速度を測定する。後方レーダ5は、ミリ波レーダ等を後続車両に照射し、その反射波を受けることで、自車両から後続車両までの距離、自車両に対する後続車両の相対速度を測定する。車速センサ6は、自車両の走行速度を計測する。
【0015】
アクセル制御部8は、自車両のアクセルを自動的に制御する。ブレーキ制御部9は、自車両のブレーキを自動的に制御する。ステアリング制御部10は、自車両のステアリング(操舵)を自動的に制御する。
【0016】
ECU7は、CPU、ROMやRAM等のメモリ、入出力回路等により構成されている。ECU7は、前方カメラ2及び後方カメラ3の撮像画像、前方レーダ4及び後方レーダ5の測定データ、車速センサ6の計測値を入力し、所定の処理を行い、アクセル制御部8、ブレーキ制御部9及びステアリング制御部10を制御する。
【0017】
図2は、ECU7により実行される処理手順の詳細を示すフローチャートである。同図において、まず前方カメラ2及び後方カメラ3の撮像画像、前方レーダ4及び後方レーダ5の測定データ、車速センサ6の計測値に基づいて、自車両と先行車両及び後続車両との車間距離、先行車両及び後続車両の横方向(左右方向)のふらつき度、先行車両及び後続車両の速度バラツキ度を求める(手順S101)。
【0018】
具体的には、前方レーダ4の測定データに基づいて自車両と先行車両との車間距離を求めると共に、後方レーダ5の測定データに基づいて自車両と後続車両との車間距離を求める。また、前方カメラ2の撮像画像に基づいて先行車両の横方向のふらつき度を求めると共に、後方カメラ3の撮像画像に基づいて後続車両の横方向のふらつき度を求める。さらに、前方レーダ4の測定データ及び車速センサ6の計測値に基づいて先行車両の速度バラツキ度を求めると共に、後方レーダ5の測定データ及び車速センサ6の計測値に基づいて後続車両の速度バラツキ度を求める。
【0019】
続いて、自車両と先行車両との車間距離、先行車両の横方向のふらつき度及び速度バラツキ度に基づいて、自車両が先行車両に追突するリスク(前衝突リスク)を演算すると共に、自車両と後続車両との車間距離、後続車両の横方向のふらつき度及び速度バラツキ度に基づいて、自車両が後続車両に追突されるリスク(後衝突リスク)を演算する(手順S102)。
【0020】
例えば前衝突リスクは、自車両と先行車両との車間距離に応じたリスクと、先行車両の横方向のふらつき度に応じたリスクと、先行車両の速度バラツキ度に応じたリスクとの合計値から得ることができる。このとき、先行車両の横方向のふらつき度に応じたリスクと、先行車両の速度バラツキ度に応じたリスクとの割合(比率)を設定しても良い。また、自車両における衝突回避の対応度(例えば自車両のドライバの覚醒状態等)も考慮して、前衝突リスクを計算しても良い。
【0021】
同様に、後衝突リスクは、自車両と後続車両との車間距離に応じたリスクと、後続車両の横方向のふらつき度に応じたリスクと、後続車両の速度バラツキ度に応じたリスクとの合計値から得ることができる。この場合にも、後続車両の横方向のふらつき度に応じたリスクと、後続車両の速度バラツキ度に応じたリスクとの割合を設定しても良い。
【0022】
続いて、前衝突リスクと後衝突リスクとが等しくなることで両者の衝突リスクが最小となるような、先行車両及び後続車両に対する自車両の車間位置を求め、自車両が当該車間位置に来るようにアクセル制御部8及びブレーキ制御部9を制御する(手順S103)。
【0023】
具体的には、手順S102で前衝突リスク及び後衝突リスクを計算したときに、例えば前衝突リスクが後衝突リスクよりも高い場合には、自車両と先行車両との車間距離が自車両と後続車両との車間距離よりも長くなるように、アクセル制御部8及びブレーキ制御部9を制御する。
【0024】
続いて、先行車両の横方向のふらつき度及び先行車両の速度バラツキ度に基づいて、自車両が先行車両を追い越すリスク(追越リスク)を演算する(手順S104)。このとき、先行車両の速度バラツキ度に応じたリスクに対して先行車両の横方向のふらつき度に応じたリスクの比率を十分高くして、追越リスクを計算する。つまり、追越リスクの演算では、前衝突リスク及び後衝突リスクの演算と比較して、先行車両の横方向のふらつき度を重視する。
【0025】
続いて、追越リスクが前衝突リスク(=後衝突リスク)よりも低いかどうかを判断する(手順S105)。追越リスクが前衝突リスクよりも低いと判断されたときは、自車両が先行車両を追い越すようにアクセル制御部8及びステアリング制御部10を制御する(手順S106)。
【0026】
以上において、前方レーダ4、後方レーダ5、ECU7の上記手順S101は、自車両と自車両の周囲を走行する周囲車両との距離を検出する距離検出手段を構成する。前方カメラ2、後方カメラ3、前方レーダ4、後方レーダ5、車速センサ6、ECU7の上記手順S101は、周囲車両の走行挙動を検出する挙動検出手段を構成する。ECU7の上記手順S102は、自車両と周囲車両との距離及び周囲車両の走行挙動に基づいて、自車両と周囲車両とが衝突するリスクを算出する衝突リスク算出手段を構成する。ECU7の上記手順S103、アクセル制御部8、ブレーキ制御部9は、自車両と周囲車両とが衝突するリスクが最小となるように周囲車両に対する自車両の位置を制御する位置制御手段を構成する。
【0027】
また、ECU7の上記手順S104は、前方車両の走行挙動に基づいて、自車両が前方車両を追い越すリスクを算出する追越リスク算出手段を構成する。ECU7の上記手順S105,S106は、自車両が前方車両を追い越すリスクが、自車両と前方車両とが衝突するリスクよりも低いときに、自車両が前方車両を追い越すように自車両を制御する追越制御手段を構成する。
【0028】
ここで、例えば図3に示すように、先行車両Qの横方向のふらつきが大きいために、前衝突リスクが高くなったときは、自車両Pと先行車両Qとの車間距離を長くとるべく自車両Pを減速させる(左図参照)ことで、前衝突リスクが低くなる。
【0029】
その後、横方向のふらつきが大きい後続車両Rが自車両Pに接近すると、後衝突リスクが高くなるため、自車両Pと後続車両Rとの車間距離を長くとるべく自車両Pを加速させる(中央図参照)。すると、自車両Pと先行車両Qとの車間距離が短くなるため、前衝突リスクが高くなってしまう。従って、最終的に前衝突リスクと後衝突リスクとが等しくなるように、自車両Pを加減速させる。
【0030】
その状態で、追越リスクを前衝突リスク(=後衝突リスク)と比較し、追越リスクが前衝突リスクよりも低いときは、自車両Pを加速させつつステアリング操作を行い、先行車両Qを追い越す(右図参照)。
【0031】
以上のように本実施形態にあっては、自車両と先行車両及び後続車両との車間距離を検出するだけでなく、先行車両及び後続車両の横方向のふらつき度や速度バラツキ度を検出し、これらの検出データに基づいて前衝突リスク、後衝突リスク及び追越リスクを演算するようにしたので、先行車両及び後続車両の走行挙動を考慮した適切な前衝突リスク、後衝突リスク及び追越リスクが得られる。そして、前衝突リスク及び後衝突リスクが等しくなるように先行車両及び後続車両に対する自車両の車間位置を制御するので、先行車両及び後続車両と自車両との位置関係が良好になる。また、追越リスクが前衝突リスクよりも小さいときに、自車両が先行車両を追い越すように自車両を制御するので、自車両による先行車両の追い越しが効果的に行われる。以上により、例えば先行車両及び後続車両が横方向にふらついて走行している場合でも、自車両と前方車両及び後続車両との衝突を確実に回避することができる。
【符号の説明】
【0032】
1…リスク回避支援装置、2…前方カメラ(挙動検出手段)、3…後方カメラ(挙動検出手段)、4…前方レーダ(距離検出手段、挙動検出手段)、5…後方レーダ(距離検出手段、挙動検出手段)、6…車速センサ(挙動検出手段)、7…ECU(距離検出手段、挙動検出手段、衝突リスク算出手段、位置制御手段、追越リスク算出手段、追越制御手段)、8…アクセル制御部(位置制御手段、追越制御手段)、9…ブレーキ制御部(位置制御手段)、10…ステアリング制御部(追越制御手段)。
【特許請求の範囲】
【請求項1】
自車両と前記自車両の周囲を走行する周囲車両との距離を検出する距離検出手段と、
前記周囲車両の走行挙動を検出する挙動検出手段と、
前記自車両と前記周囲車両との距離及び前記周囲車両の走行挙動に基づいて、前記自車両と前記周囲車両とが衝突するリスクを算出する衝突リスク算出手段と、
前記自車両と前記周囲車両とが衝突するリスクが最小となるように前記周囲車両に対する前記自車両の位置を制御する位置制御手段とを備えることを特徴とするリスク回避支援装置。
【請求項2】
前記周囲車両は、前記自車両の前方を走行する前方車両と、前記自車両の後方を走行する後方車両とを含み、
前記位置制御手段は、前記自車両と前記前方車両とが衝突するリスクと、前記自車両と前記後方車両とが衝突するリスクとが等しくなるように、前記前方車両及び前記後方車両に対する前記自車両の車間位置を制御することを特徴とする請求項1記載のリスク回避支援装置。
【請求項3】
前記前方車両の走行挙動に基づいて、前記自車両が前記前方車両を追い越すリスクを算出する追越リスク算出手段と、
前記自車両が前記前方車両を追い越すリスクが、前記自車両と前記前方車両とが衝突するリスクよりも低いときに、前記自車両が前記前方車両を追い越すように前記自車両を制御する追越制御手段とを更に備えることを特徴とする請求項2記載のリスク回避支援装置。
【請求項1】
自車両と前記自車両の周囲を走行する周囲車両との距離を検出する距離検出手段と、
前記周囲車両の走行挙動を検出する挙動検出手段と、
前記自車両と前記周囲車両との距離及び前記周囲車両の走行挙動に基づいて、前記自車両と前記周囲車両とが衝突するリスクを算出する衝突リスク算出手段と、
前記自車両と前記周囲車両とが衝突するリスクが最小となるように前記周囲車両に対する前記自車両の位置を制御する位置制御手段とを備えることを特徴とするリスク回避支援装置。
【請求項2】
前記周囲車両は、前記自車両の前方を走行する前方車両と、前記自車両の後方を走行する後方車両とを含み、
前記位置制御手段は、前記自車両と前記前方車両とが衝突するリスクと、前記自車両と前記後方車両とが衝突するリスクとが等しくなるように、前記前方車両及び前記後方車両に対する前記自車両の車間位置を制御することを特徴とする請求項1記載のリスク回避支援装置。
【請求項3】
前記前方車両の走行挙動に基づいて、前記自車両が前記前方車両を追い越すリスクを算出する追越リスク算出手段と、
前記自車両が前記前方車両を追い越すリスクが、前記自車両と前記前方車両とが衝突するリスクよりも低いときに、前記自車両が前記前方車両を追い越すように前記自車両を制御する追越制御手段とを更に備えることを特徴とする請求項2記載のリスク回避支援装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−143744(P2011−143744A)
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2010−3961(P2010−3961)
【出願日】平成22年1月12日(2010.1.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成22年1月12日(2010.1.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]