
リソースの配分に係る演算処理を行なうシステムおよびリソース配分を決定する方法
【課題】典型的には、電力を発生して負荷で消費するような、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおいて、リソースの配分に係る演算処理を行なうシステムおよびリソース配分を決定する方法を提供する。
【解決手段】システムは、第1のノードで発生するリソースの大きさを示す変数と、伝送率を示す変数とに基づいて目的関数の値を算出する手段と、目的関数をリソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけリソースの大きさを示す変数を更新する手段と、目的関数を伝送率を示す変数で偏微分して得られる微分値に応じた値だけ伝送率を示す変数を更新する手段と、更新後の値に基づいて、目的関数の値の算出を繰返す手段と、目的関数の算出処理が収束したときの、リソースの大きさおよび伝送率を出力する手段とを含む。
【解決手段】システムは、第1のノードで発生するリソースの大きさを示す変数と、伝送率を示す変数とに基づいて目的関数の値を算出する手段と、目的関数をリソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけリソースの大きさを示す変数を更新する手段と、目的関数を伝送率を示す変数で偏微分して得られる微分値に応じた値だけ伝送率を示す変数を更新する手段と、更新後の値に基づいて、目的関数の値の算出を繰返す手段と、目的関数の算出処理が収束したときの、リソースの大きさおよび伝送率を出力する手段とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおけるリソースの配分に係る演算処理を行なうシステムおよびリソース配分を決定する方法に関する。
【背景技術】
【0002】
従来から、電力を供給するための電力網と音声・データを交換するための通信網とは互いに独立して敷設および維持されてきた。現在、エネルギーを効率的に利用することを目的として、Green ICT(Information and Communications Technology:情報通信技術)と呼ばれる技術が注目を集めている。
【0003】
このGreen ICTでは、インターネットに代表される情報通信ネットワークと、主に電力会社が運用する電力網(パワーネットワーク)とを共通のネットワークに統合することが計画されている。さらに、太陽光発電、風力発電、バイオマス発電といったGreenエネルギー源(再生可能な自然エネルギー源)や、HV(Hybrid Vehicle:ハイブリッド自動車)やEV(Electric Vehicle:電気自動車)に搭載される蓄電器(バッテリ)などの、分散して存在するエネルギー源を、ネットワークを介して統合することが計画されている。
【0004】
このようなエネルギー源の統合によって、全体として、安定した需要/供給システムを構築することができる。さらに、電力供給の季節変動や突発的な故障に対する緊急の電力需要に対しても、広く分散している余剰電力を活用することもできる。
【0005】
上述のGreen ICTに関するものではないが、特許文献1(特開平10−276458号公報)には、電源異常発生時に代替的キャリアネットワークへ自動的に切り換える構成が開示されている。自動的に切り換える構成を採用することで、ユーザが高価なバックアップ電力供給システムに投資または介入する必要をなくすことができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−276458号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、現状では、上述のようなシステムは未だ計画中ないし研究開発が開始されたばかりのものであり、これから開発すべき課題は山積している。すなわち、電力需要および供給負荷分散の動的スケジューリングや、将来あるべき理想的な運用システムの設計方針といった具体的な内容については、まだ調査・検討段階に過ぎない。
【0008】
本発明は、上記のような問題を解決するためになされたものであって、その目的は、典型的には、電力を発生して負荷で消費するような、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおいて、リソースの配分に係る演算処理を行なうシステムおよびリソース配分を決定する方法を提供することである。
【課題を解決するための手段】
【0009】
この発明のある局面に従えば、リソースを発生する第1のノードとリソースを消費する第2のノードとを含むネットワークにおけるリソースの配分に係る演算処理を行なうシステムを提供する。本システムは、目的関数を保持する手段を含む。目的関数は、リソースの大きさに関して単調増加する、第1のノードから供給されるリソースに必要なコストの値を出力する第1の関数と、第1のノードで発生したリソースのうち第2のノードへ供給されるリソースの大きさと、第2のノードで消費されるリソースの大きさとの差が大きくなるほどより大きな値を出力する、第1のノードから第2のノードへのリソースの経路における伝送率を変数として有する第2の関数とを含む。本システムは、さらに、第1のノードで発生するリソースの大きさを示す変数と、伝送率を示す変数とに基づいて目的関数の値を算出する手段と、目的関数をリソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけリソースの大きさを示す変数を更新する手段と、目的関数を伝送率を示す変数で偏微分して得られる微分値に応じた値だけ伝送率を示す変数を更新する手段と、更新後の値に基づいて、目的関数の値の算出を繰返す手段と、目的関数の算出処理が収束したときの、リソースの大きさおよび伝送率を出力する手段とを含む。
【0010】
好ましくは、目的関数は、第1のノードで発生するリソースの大きさがゼロに近付くほどより大きな値を出力する第3の関数をさらに含む。
【0011】
好ましくは、目的関数は、伝送率が「0」または「1」に近いほどより小さな値を出力する第4の関数をさらに含む。
【0012】
好ましくは、目的関数の値が新たに算出される前に、リソースの大きさを示す変数、および、伝送率を示す変数のいずれもが更新される。
【0013】
あるいは、好ましくは、目的関数の値が新たに算出される前に、リソースの大きさを示す変数、および、伝送率を示す変数のいずれか一方が更新される。
【0014】
好ましくは、算出される目的関数の値が最小値を実質的に維持する状態になった場合に、目的関数の算出処理が収束したと判断する。
【0015】
好ましくは、ネットワークは、リソースを中継、または、リソースを蓄える第3のノードをさらに含む。第2の関数は、第1のノードから第3のノードへ供給されるリソースの大きさに関する関数と、第1のノードから第2のノードへ供給されるリソースの大きさに関する関数と、第3のノードから第2のノードへ供給されるリソースの大きさに関する関数とを含む。
【0016】
好ましくは、本システムは、第2のノードに関する現実の情報を取得して学習することにより、第2のノードで消費されるリソースの大きさの時間に関する特性関数を決定する手段をさらに含む。目的関数の値を算出する手段は、特性関数により決定される未来のリソース消費量に基づいて、目的関数の値を算出する。
【0017】
好ましくは、ネットワークは、電力を供給するネットワークに対応付けられている。
この発明の別の局面に従えば、リソースを発生する第1のノードとリソースを消費する第2のノードとを含むネットワークにおけるリソース配分を決定する方法を提供する。本方法は、演算処理装置が、目的関数を保持するステップを含む。目的関数は、リソースの大きさに関して単調増加する、第1のノードから供給されるリソースに必要なコストの値を出力する第1の関数と、第1のノードで発生したリソースのうち第2のノードへ供給されるリソースの大きさと、第2のノードで消費されるリソースの大きさとの差が大きくなるほどより大きな値を出力する、第1のノードから第2のノードへのリソースの経路における伝送率を変数として有する第2の関数とを含む。本方法は、さらに、演算処理装置が、第1のノードで発生するリソースの大きさを示す変数と、伝送率を示す変数とに基づいて目的関数の値を算出するステップと、目的関数をリソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけリソースの大きさを示す変数を更新するステップと、目的関数を伝送率を示す変数で偏微分して得られる微分値に応じた値だけ伝送率を示す変数を更新するステップと、更新後の値に基づいて、目的関数の値の算出を繰返すステップと、目的関数の算出処理が収束したときの、リソースの大きさおよび伝送率を出力するステップとを含む。
【発明の効果】
【0018】
本発明によれば、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおいて、リソースの配分を適切に行なうことができる。
【図面の簡単な説明】
【0019】
【図1】本実施の形態に従う電力供給・需要制御システムの構成を示す模式図である。
【図2】本実施の形態に係るコントローラのハードウェア構成を示すブロック図である。
【図3】既存の電力ネットワークの発展例について模式的に示す図である。
【図4】既存の電力システムにおける典型的なモデルを示す図である。
【図5】本発明の実施の形態に従う制約関数Hp*の一例を示す図である。
【図6】本発明の実施の形態に従う制約関数HBおよび制約関数HQの一例を示す図である。
【図7】本発明の実施の形態に従う制約関数He(Wi)の一例を示す図である。
【図8】本発明の実施の形態に従う制約関数Hsの一例を示す図である。
【図9】この発明の実施の形態に従う既存の電力システムについての制御手順を示すフローチャートである。
【図10】マイクログリッドの一例について模式的に示す図である。
【図11】この発明の実施の形態に従う既存のマイクログリッドについての制御手順を示すフローチャートである。
【図12】既存の電力ネットワークについてのシミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。
【図13】既存の電力ネットワークについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。
【図14】既存の電力ネットワークについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【図15】マイクログリッドについてのシミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。
【図16】マイクログリッドについてのシミュレーションによって観測された需要ノードQkの時間変化を示すグラフである。
【図17】マイクログリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。
【図18】マイクログリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【図19】マイクログリッドについての事故シミュレーションによって観測された需要ノードQkの時間変化を示すグラフである。
【図20】マイクログリッドについての事故シミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。
【図21】マイクログリッドについての事故シミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。
【図22】マイクログリッドについての事故シミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【図23】既存の電力ネットワークに複数のマイクログリッドが統合された構成例について模式的に示す図である。
【図24】スマートグリッドについてのシミュレーションによって観測された発電所ノード(ノード1)からの供給電力Piの時間変化を示すグラフである(同期モードの場合)。
【図25】スマートグリッドについてのシミュレーションによって観測された蓄電器(ノード17)へ供給される電力Bjの時間変化を示すグラフである(同期モードの場合)。
【図26】スマートグリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである(同期モードの場合)。
【図27】スマートグリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである(同期モードの場合)。
【図28】スマートグリッドについてのシミュレーションによって観測された発電所ノード(ノード1)からの供給電力Piの時間変化を示すグラフである(非同期モードの場合)。
【図29】スマートグリッドについてのシミュレーションによって観測された蓄電器(ノード17)へ供給される電力Bjの時間変化を示すグラフである(非同期モードの場合)。
【図30】スマートグリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである(非同期モードの場合)。
【図31】スマートグリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである(非同期モードの場合)。
【図32】本実施の形態に従う需要予測をするためのサービス層を統合したネットワーク・アーキテクチャの例を模式的に示す図である。
【図33】本実施の形態に従うシステムを新世代ネットワークに実装した場合のネットワーク・アーキテクチャの例を模式的に示す図である。
【図34】本実施の形態に従う予測学習層を実現するためのネットワーク構成を模式的に示す図である。
【図35】本実施の形態に従うアルゴリズム学習における動作を模式的に示す図である。
【図36】本実施の形態に従うアルゴリズム学習における実装例を模式的に示す図である。
【発明を実施するための形態】
【0020】
本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中の同一または相当部分については、同一符号を付してその説明は繰返さない。
【0021】
本実施の形態においては、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおけるリソースの配分に係る演算処理の典型例として、電力を供給するネットワーク(既存の電力ネットワーク、マイクログリッド、スマートグリッドなど)について例示する。すなわち、リソースが「電力」に相当し、リソースを発生するノードが「発電所」などの電力を発生する主体に相当し、リソースを消費するノードが「負荷」や「需要」などの電力を消費する主体に相当する。そして、電力を供給するネットワークにおける状況に応じて、発生される電力の配分や、消費される電力の配分といった決定を行なう。
【0022】
本発明は、電力を供給するネットワークだけでなく、ネットワーク内でリソースが発生し、伝送され、そして消滅するような形態が存在するネットワークであれば、様々な用途に用いることができる。
【0023】
たとえば、後述するように、地球上に散在する自然産物、一般的な商品、希少金属などを「リソース(資源)を発生するノード」とみなした場合に、これらの資源を消費する消費者を「リソースを消費するノード」とみなすことができる。そして、本発明は、これらのリソースについての、需要/供給に関する最適予測配分ネットワーク・サービスシステムや、物流システムに適用できる。
【0024】
<A.システム構成>
まず、本実施の形態に従う電力供給・需要制御システムのシステム構成について説明する。
【0025】
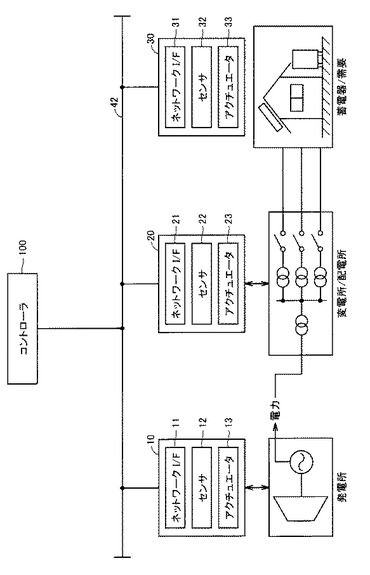
図1は、本実施の形態に従う電力供給・需要制御システムの構成を示す模式図である。図1を参照して、本システムは、電力システムを構成する、発電所、変電所/配電所、蓄電器、需要などを含む。コントローラ100は、これらの要素の各々における状態値を取得し、後述するような制御ロジックを実行することで、各要素に対する制御値を算出する。
【0026】
より具体的には、本システムは、コントローラ100と、フィールドコントローラ10,20,30とを含む。
【0027】
フィールドコントローラ10は、発電所に配置され、発電所における状態値(運転状態や発電電力など)を収集するとともに、コントローラ100からの制御指令に従って発電所を制御する。より具体的には、フィールドコントローラ10は、コントローラ100とネットワーク42を通じて通信を行なうためのネットワークI/F11と、状態値を取得するためのセンサ12と、各機器を実際に制御するためのアクチュエータ13とを含む。
【0028】
同様に、フィールドコントローラ20は、変電所/配電所に配置され、変電所/配電所における状態値(送出電力や伝送率など)を収集するとともに、コントローラ100からの制御指令に従って変電所/配電所を制御する。フィールドコントローラ20は、フィールドコントローラ10と同様に、ネットワークI/F21と、センサ22と、アクチュエータ23とを含む。
【0029】
さらに、フィールドコントローラ30は、工場や家庭などの需要家に配置され、当該需要家に設けられる蓄電器や負荷などの状態値を収集するとともに、コントローラ100からの制御指令に従って蓄電器を制御する。なお、需要家に太陽光発電設備などが設けられている場合には、これらの情報についても収集する。フィールドコントローラ30は、フィールドコントローラ10と同様に、ネットワークI/F31と、センサ32と、アクチュエータ33とを含む。
【0030】
<B.ハードウェア構成>
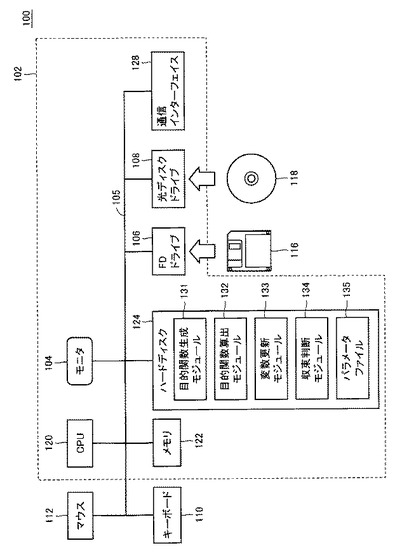
次に、本実施の形態に従うコントローラ100のハードウェア構成について、図2を参照して説明する。図2は、本実施の形態に係るコントローラ100のハードウェア構成を示すブロック図である。
【0031】
コントローラ100は、コンピュータ本体102と、表示装置としてのモニタ104と、入力装置としてのキーボード110およびマウス112とを有する。モニタ104、キーボード110、およびマウス112は、コンピュータ本体102とバス105を介して接続される。
【0032】
コンピュータ本体102は、フレキシブルディスク(Flexible Disk:以下「FD」とも称す。)ドライブ106と、光ディスクドライブ108と、CPU(Central Processing Unit)120と、メモリ122と、直接アクセスメモリ装置、たとえば、ハードディスク124と、通信インターフェイス128とを含む。これらの部品は、互いにバス105で接続されている。
【0033】
FDドライブ106は、FD116に情報を読み書きする。光ディスクドライブ108は、CD−ROM(Compact Disk Read-Only Memory)118などの光ディスク上の情報を読み込む。通信インターフェイス128は、外部とデータの授受を行なう。
【0034】
なお、CD−ROM118は、コンピュータ本体に対してインストールされるプログラムなどの情報を記録可能な媒体であれば、他の媒体、たとえば、DVD−ROM(Digital Versatile Disk)やメモリーカードなどでもよく、その場合は、コンピュータ本体102には、これらの媒体を読み取ることが可能なドライブ装置が設けられる。また、バス105には、カセット形式の磁気テープを着脱自在に装着してアクセスする磁気テープ装置が接続されていてもよい。
【0035】
メモリ122は、ROM(Read Only Memory)およびRAM(Random Access Memory)を含む。
【0036】
ハードディスク124は、後述する本実施の形態に従う電力需要/供給負荷の制御ロジックを実現するためのプログラムや各種設定値などを格納する。より具体的には、ハードディスク124は、目的関数生成モジュール131と、目的関数算出モジュール132と、変数更新モジュール133と、収束判断モジュール134と、パラメータファイル135とを含む。
【0037】
CPU120が目的関数生成モジュール131を実行することで、対象のネットワークにおけるリソースの配分を最適化するために用いる目的関数(を示すデータ)を生成するとともに、メモリ122などにその生成された目的関数を保持させる。なお、目的関数の詳細については後述する。
【0038】
CPU120が目的関数算出モジュール132を実行することで、保持されている目的関数に基づいてその値を算出する。なお、この目的関数の値の算出は、リソースを発生するノード(典型的には、発電所)で発生するリソース(電力)の大きさを示す変数と、ノード間の伝送率を示す変数とに基づいて実行される。
【0039】
CPU120が変数更新モジュール133を実行することで、目的関数の値の算出に用いられるパラメータを更新する。より具体的には、CPU120は、目的関数をリソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけリソースの大きさを示す変数を更新する。また、CPU120は、目的関数を伝送率を示す変数で偏微分して得られる微分値に応じた値だけ伝送率を示す変数を更新する。
【0040】
CPU120が収束モジュール判断134を実行することで、変数更新モジュール133の実行により更新されたパラメータの値に基づいて、目的関数の値の算出を繰返し実行させるとともに、当該目的関数の算出処理が収束したか否かを判断する。CPU120は、目的関数の算出処理が収束したときの、リソースの大きさおよび伝送率を出力する。
【0041】
パラメータファイル135は、対象とするネットワークのトポロジーやそれを構成する部材についての各種設定を保持する。
【0042】
演算処理装置として機能するCPU120は、メモリ122をワーキングメモリとして、上述した各プログラムに対応した処理を実行する。
【0043】
図2に示したコンピュータのハードウェア自体およびその動作原理は一般的なものである。したがって、本発明の機能を実現するに当り本質的な部分は、FD116、CD−ROM118、ハードディスク124などの記憶媒体に記憶されたソフトウェアである。
【0044】
<C.電力需要/供給負荷の制御ロジック>
(c1:既存の電力ネットワークの発展)
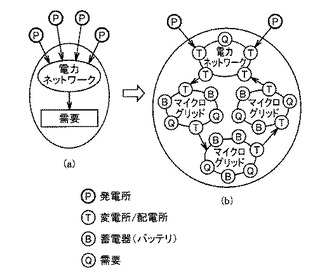
図3は、既存の電力ネットワークの発展例について模式的に示す図である。なお、図3については、合田 他、“マイクログリッド−分散電源と電力ネットワークの共生のために”、電気新聞ブックス−エネルギー新書、2004年の29頁の記述を参考とした。
【0045】
まず、図3を参照して、既存の電力ネットワークがマイクログリッド(Microgrid:以下「MG」とも称す。)と統合する構成例について説明する。
【0046】
図3(a)に示すように、既存の電力ネットワークでは、複数の発電所(発電プラントと発電機)が並列的に接続されるとともに、これらの複数の発電所が需要家(負荷)へ電力を供給する。この図3(a)に示す既存の電力ネットワークに複数のMGが結合された場合には、図3(b)に示すような構成となる。
【0047】
MGの各々は、典型的には、電力/熱供給設備(図3(b)には図示していない)、蓄電設備、電力ネットワーク、情報通信技術を利用した制御装置(図3(b)には図示していない)、および、複数の負荷といった要素を含む。MGが既存の電力ネットワーク(いわゆる、商用電力系統)と大きく異なる点としては、熱を利用する用途、および、蓄電設備が存在することである。
【0048】
そして、このようなMGが複数結合されることで、いわゆるスマートグリッド(Smart Grid)を構成する。
【0049】
(c2:マイクログリッド/スマートグリッドのモデル化)
次に、マイクログリッドおよびスマートグリッドにおける電力需要/供給負荷の制御を実現するために、各構成要素をモデル化する手法を以下に説明する。
【0050】
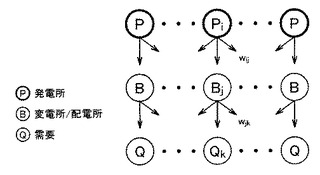
図4は、既存の電力システムにおける典型的なモデルを示す図である。図4に示す既存の電力システムにおいては、発電所(P)、変電所/配電所(T)、需要(Q)の3つの要素が階層的に結合される。以下では、これらの要素を「ノード」と称す。
【0051】
より具体的には、発電所ノードPiには、電力を送出するための電力伝送路wijが結合されており、同様に、変電所/配電所ノードBjには、電力を送出するための電力伝送路wjkが結合されている。
【0052】
これに対して、図3に示すマイクログリッドにおいては、1つの発電所ノードPiからの電力は、電力伝送路wijおよびwikなどを通じて、複数の蓄電器ノードBjおよび需要ノードQkへそれぞれ供給される。なお、図3には図示されていないが、各パワーネットワーク・ケーブルには、後述するミドルウェア層を介して必要な情報を取得するための機構が設けられている。
【0053】
(c3:既存の電力システムについてのモデル式)
再度図4を参照して、i番目の発電所ノードPiからの供給電力をPiとし、j番目の変電所/配電所ノードBjから送出される電力をBjとし、k番目の需要ノードQkへの供給電力をQkとし、i番目の発電所ノードからj番目の変電所/配電所ノードへの電力伝送効率をwijとし、j番目の変電所/配電所ノードからk番目の需要ノードへの電力伝送効率をwjkとすると、これらの物理量の間には、(1)式および(2)式が成り立つ。なお、以下の説明では、同一の符号「Pi」を「i番目の発電所ノード」を示す符号、および、「i番目の発電所ノードからの供給電力」を示す符号として共用する。その他についても同様である。
【0054】
【数1】

【0055】
さらに、電力システム全体の電力バランスを評価するための目的関数Rは、(3)式のように定義できる。
【0056】
【数2】
【0057】
上式において、λ,μ,ν,ξは、各制約関数のペナルティーの重みを規定する定数であり、いずれも一定値に設定される。
【0058】
(3)式の目的関数Rについて、より詳しく説明する。(3)式の右辺第1項のP0は、発電所ノードで電力を発生するために必要なコストを示す関数である。また、(3)式の右辺第2項のHp*は、各電力ノードでの電力が0にならないように制約をかける制約関数である。また、(3)式の右辺第3項のHv*は、各電力ノードの最小電力と最大電力とを規定するための制約関数である。(3)式の右辺第4項のHe*は、供給元である各電力ノードから供給される電力が供給先の電力(需要)の合計と等しくするための制約関数である。(3)式の右辺第4項のHs*は、電力の供給をする/しないを切り換えるスイッチに関する制約関数である。
【0059】
本実施の形態に従う制御ロジックにおいては、発電所ノードPiからの供給電力をPi、ノード間の伝送率を逐次更新して、目的関数Rの値が最小値となるパラメータを探索する。そして、この探索結果に基づいて、電力ネットワーク内での電力フローを制御、すなわち、電力の配分を制御する。目的関数Rの値を最小化する数学的な方法については後述するとして、先に目的関数Rに含まれる各制約関数について説明する。
【0060】
(イ)関数P0について
関数P0は、電力システムに含まれる発電プラントにおける燃料コストの総和として定義することができる。各発電プラントの燃料コストは、当該発電プラントからの供給電力Piを変数とする二次式として近似化できる。具体的には、定数ai,bi,ciを用いて、以下のように示すことができる。
【0061】
【数3】
【0062】
この関数P0は、燃料コストが低いほどその値が小さくなるように設定される。すなわち、関数P0は、リソースである電力の大きさに関して単調増加する関数であり、発電所ノードから供給されるリソース(電力)に必要なコストの値を出力する。
【0063】
(ロ)制約関数Hp*について
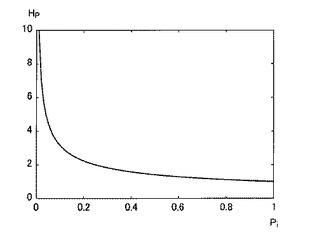
制約関数Hp*は、各電力ノードでの電力が0にならないように制約をかけるためのものであるから、対応する供給電力Piが大きいほどその値が小さくなるような関数が用いられる。図5は、本発明の実施の形態に従う制約関数Hp*の一例を示す図である。本実施の形態においては、図5に示すように、各電力ノードについては、供給電力Piを定数−αpのべき乗して得られる値が用いられ、制約関数Hp*としては、これらの各電力ノードについて得られた値の総和が採用される。
【0064】
すなわち、本実施の形態において用いられる制約関数Hp*は、以下のように示すことができる。
【0065】
【数4】
【0066】
この制約関数Hp*は、発電所ノードで発生する電力(リソース)の大きさがゼロに近付くほどより大きな値を出力する。
【0067】
(ハ)制約関数Hv*について
制約関数Hv*は、各電力ノードの最小電力と最大電力とを規定するための制約関数である。より具体的には、変電所/配電所ノードにおける供給能力と需要ノードにおける負荷の大きさとを考慮する必要がある。
【0068】
本実施の形態において用いられる制約関数Hv*は、以下のように示すことができる。
【0069】
【数5】
【0070】
ここで、制約関数Hv*は、制約関数HBと制約関数HQとを含む。制約関数Hv*としては、これらの各電力ノードについて得られた、制約関数HBおよび制約関数HQの値の総和が採用される。
【0071】
制約関数HBは、変電所/配電所ノードの電力Bjがその送出可能な制限値(最大許容電力Bjmaxおよび最小許容電力Bjmin)を満たすように制約するものである。また、制約関数HQは、需要ノードの需要Qkがその負荷の制限値(最大許容電力Qkmaxおよび需要電力Dk)を満たすように制約するものである。
【0072】
制約関数HBおよび制約関数HQは、いずれもその制限範囲の中心値に近いほどその値が小さくなるような井戸型の関数が用いられる。図6は、本発明の実施の形態に従う制約関数HBおよび制約関数HQの一例を示す図である。
【0073】
(ニ)制約関数He*について
制約関数He*は、供給元である各電力ノードから供給される供給電力Piが供給先の電力(需要)の合計と等しくするための制約関数である。
【0074】
本実施の形態において用いられる制約関数He*は、以下のように示すことができる。
【0075】
【数6】
【0076】
ここで、制約関数He*は、制約関数He(Wi)と制約関数HQ(Wj)とを含む。より具体的には、制約関数He(Wi)は、発電所ノードPiによって発生される供給電力Piのフロー全体が総電力により制限されるという条件を満たすために用いられるものである。また、制約関数HQ(Wi)は、変電所/配電所ノードBjによって送出される電力フローの全体が総電力により制限されるという条件を満たすために用いられるものである。
【0077】
制約関数He(Wi)および制約関数HQ(Wj)は、いずれもその制限範囲の中心値に近いほどその値が小さくなるような関数が用いられる。図7は、本発明の実施の形態に従う制約関数He(Wi)の一例を示す図である。
【0078】
なお、変数Wiおよび変数Wjについては、それぞれ、i番目の発電所ノードからj番目の変電所/配電所ノードへの電力伝送効率wij、および、j番目の変電所/配電所ノードからk番目の需要ノードへの電力伝送効率wjkを用いて、以下に示す関係が成立する。
【0079】
【数7】
【0080】
この制約関数He*は、発電所ノードから需要ノードへの電力(リソース)の経路における伝送率(電力伝送効率をwijおよびwjk)を変数として有する。また、制約関数He*は、発電所ノードで発生した電力(リソース)のうち需要ノードへ供給される電力の大きさと、需要ノードで消費される電力の大きさとの差が大きくなるほどより大きな値を出力する。
【0081】
(ホ)制約関数Hs*について
制約関数Hs*は、電力の供給をする/しないを切り換えるスイッチに関する制約関数である。具体的には、隣接するノード間での電力伝送効率(電力フローのノード間における係数×ノード間の伝送率)を考慮する。なお、電力フローにおいては、通常、ノード間の伝送率は「0」または「1」に近い値をとる。
【0082】
本実施の形態において用いられる制約関数Hs*は、以下のように示すことができる。
【0083】
【数8】
【0084】
但し、cijは、ノードiからノードjへの電力フローの係数を示し、xijは、ノードiからノードjへの伝送率を示す。
【0085】
この制約関数Hs*は、ノード間の伝送率が「0」または「1」に近いほどより小さな値を出力する。図8は、本発明の実施の形態に従う制約関数Hsの一例を示す図である。
【0086】
(c4:既存の電力システムについての制約関数の解法)
本実施の形態においては、上述の(3)式に示す目的関数Rの最小値を探索する方法として、i番目の発電所ノードからの供給電力Piについて微小変化分ΔPiずつ変化させるとともに、各時点におけるノード間の伝送率xij,xjkについても微小変化分ΔxijおよびΔxjkずつ変化させて順次計算を行なう。そして、最小値(収束値)を探索する。
【0087】
すなわち、目的関数Rを電力(リソース)の大きさを示す変数であるPiで偏微分して得られる微分値に応じた値だけPiを更新するとともに、目的関数Rを伝送率を示すxijおよびxjkでそれぞれ偏微分して得られる微分値に応じた値だけ伝送率xijおよびxjkを更新する。そして、更新後のパラメータに基づいて、目的関数Rの値の算出を繰返す。そして、目的関数Rの算出処理が収束したときの、供給電力Piおよび変数xijおよびxjkが出力される。
【0088】
なお、目的関数Rの値が新たに算出される前に、電力(リソース)の大きさを示す変数であるPi、ならびに、伝送率を示すxijおよびxjkのいずれをも更新する処理形態(以下「同期的更新法」とも称す。)を採用することもできる。あるいは、これらのうちいずれか一方のみを更新する処理形態(以下「非同期的更新法」とも称す。)を採用することもできる。
【0089】
まず、i番目の発電所ノードからの供給電力Piの微小変化分ΔPiについては、以下に示す(4)式に従って算出することができる。
【0090】
【数9】
【0091】
ここで、周期的な発散を回避するために、定数ηpは、以下に示すように、RをPiについてテーラー展開して得られた式についての1次近似を用いてスケーリングされる。
【0092】
【数10】
【0093】
なお、定数ηpは、元のRの値を(1−ηp)倍に低減させる低減率として定義される。これは、1次近似した場合の目的関数Rの次ステップにおける値に等しい。したがって、定数ηpは、以下に示す(5)式のように表すことができる。
【0094】
【数11】
【0095】
そして、供給電力Piは、Pi(t+1)=Pi(t)+ΔPi(t)に従って順次更新される。なお、変数tは、後述する目的関数Rの収束計算における計算回数(ステップ)を示す。
【0096】
上述と同様にして、ノードBjとノードQkとの間のノード間の伝送率xjkについては、以下に示す(6)式のように表すことができる。
【0097】
【数12】
【0098】
上述の(5)式と同様に、周期的な発散を回避するために、定数ηは、以下に示す(7)式に示すように、Rについての1次近似を用いてスケーリングされる。
【0099】
【数13】
【0100】
次に、ノードPiとノードBjとの間の伝送率の変化分Δxijについては、以下に示す(8)式のように表すことができる。
【0101】
【数14】
【0102】
さらに、上述の(7)式と同様に、周期的な発散を回避するために、定数ηは、以下に示す(9)式に従ってスケーリングされる。
【0103】
【数15】
【0104】
(c5:既存の電力システムについての制御手順)
図3(a)に示すような既存の電力システムについての制御手順としては、発電所ノードからの供給電力Pi,伝送率xij,伝送率xjkを同期させて更新しつつ計算を繰返すことで、上述の(3)式に示す目的関数Rが最小値となるそれぞれの値を逐次決定する。
【0105】
図9を用いてこの具体的な処理手順について説明する。図9は、この発明の実施の形態に従う既存の電力システムについての制御手順を示すフローチャートである。
【0106】
図9を参照して、まず、CPU120は、伝送率xijおよびxjkのそれぞれの初期値をランダムに決定する(ステップS100)。
【0107】
CPU120は、電力の順伝搬の期間中、上述の(3)式を用いて、目的関数Rの値を算出する(ステップS102)。そして、CPU120は、上述の(6)式を用いて、伝送率xjkについての微小変化分Δxjkを算出する(ステップS104)。また、CPU120は、上述の(8)式を用いて、伝送率xijについての微小変化分Δxijを算出する(ステップS106)。その後、CPU120は、以下の式に従って、伝送率xijおよびxjkを更新する(ステップS108)。
【0108】
xjk(t+1)=xjk(t)+Δxjk
xij(t+1)=xij(t)+Δxij
また、CPU120は、上述の(4)式を用いて、発電所ノードからの供給電力Piについて微小変化分ΔPiを算出する(ステップS110)。その後、CPU120は、以下の式に従って、発電所ノードからの供給電力Piを更新する(ステップS112)。
【0109】
Pi(t+1)=Pi(t)+ΔPi
さらに、CPU120は、目的関数Rについての計算が収束しているか否かを判断する(ステップS114)。より具体的には、発電所ノードからの供給電力Piについて微小変化分ΔPi,伝送率xjkについての微小変化分Δxjk,伝送率xijについての微小変化分Δxijのいずれもが安定している、すなわち、変化量が所定のしきい値以下である場合には、収束していると判断される。そうでなければ、収束していないと判断される。
【0110】
すなわち、CPU120は、算出される目的関数Rの値が最小値を実質的に維持する状態になった場合に、目的関数Rの算出処理が収束したと判断する。
【0111】
目的関数Rについての計算が収束していない場合(ステップS114においてNOの場合)には、ステップS102以下の処理が繰返される。一方、目的関数Rについての計算が収束している場合(ステップS114においてYESの場合)には、算出された、発電所ノードからの供給電力Pi,伝送率xij,伝送率jkとなるように制御指令を出力する(ステップS116)。すなわち、電力ネットワークにおける電力フローが制御される。そして、処理は終了する。
【0112】
なお、図9のフローチャートに示される処理手順は、所定周期あるいは何らかのイベント発生毎に実行される。
【0113】
(c6:マイクログリッドについてのモデル式)
上述したモデル式およびその解法については、上述したようなマイクログリッドにも拡張することができる。
【0114】
図10は、マイクログリッドの一例について模式的に示す図である。本実施の形態においては、図10に示すマイクログリッドに適用する場合を例として、モデル式の導出および各種のシミュレーションの実行結果などを提示するが、本実施の形態は、一般性を失わない限りにおいて、各種のマイクログリッドに適用することができる。
【0115】
図10に示すように、発電所ノードP1を中心として、放射状に複数の蓄電器(バッテリ)ノードおよび需要ノードが電力ネットワーク・ケーブルを介して結合されているとする。特に、図10に示すマイクログリッドにおいては、蓄電器ノード間での電力の遣り取りについても考慮する。これは、需要に対処するためにある蓄電器から電力が供給されているような状況下において、当該電力供給中の蓄電器に蓄えられている電力が枯渇しそうになった場合に、他の蓄電器から電力を融通するといった使用形態が想定されるからである。あるいは、蓄電器が蓄えることのできる電力量については制限があるので、ある蓄電器がそれ以上電力を蓄えることができない状況になった場合に、他の蓄電器に電力を蓄えてもらうような使用形態も想定される。
【0116】
i番目の発電所ノードからの供給電力をPiとし、j番目の蓄電器ノードに供給される電力をBjとし、j’番目の蓄電器ノードからj番目の蓄電器ノードに送出される電力をBj’とし、k番目の需要ノードへの供給電力をQkとすると、各ノード間の電力伝送効率wを用いると、これらの物理量の間には、上述の(1)式および(2)式を拡張して、(10)式〜(12)式が成り立つ。
【0117】
【数16】
【0118】
さらに、電力システム全体の電力バランスを評価するための目的関数Rは、(13)式のように定義できる。
【0119】
【数17】
【0120】
上式において、λ,μ,ν,ξは、いずれも定数である。
(13)式の目的関数Rを構成するそれぞれの関数(関数P0,制約関数Hp*,制約関数Hv*,制約関数He*,制約関数Hs*)が有する意味は、上述したものと同様である。すなわち、関数P0は、発電所ノードで電力を発生するために必要なコストを示すものであり、制約関数Hp*は、各電力ノードでの電力が0にならないように制約をかけるもの数であり、制約関数Hv*は、各電力ノードの最小電力と最大電力とを規定するものであり、制約関数He*は、供給元である各電力ノードから供給される電力が供給先の需要(負荷)の合計と等しくするためのものであり、制約関数Hs*は、電力の供給をする/しないを切り換えるスイッチに関するものである。
【0121】
図10に示すマイクログリッドでは、関数P0,制約関数Hp*,制約関数Hv*,制約関数He*,制約関数Hs*を以下に示すように定義することができる。なお、図10に示すマイクログリッドでは、図4に示す既存の電力ネットワークに比較して、より多くのノードが存在するため、既存の電力ネットワークのモデル化において用いられる制約関数に比較して、より多くの変数を含む関数となっている。
【0122】
【数18】
【0123】
このうち、制約関数He*については、電力(リソース)を中継する変電所/配電所ノード、または、電力(リソース)を蓄える蓄電器(バッテリ)ノードが考慮されたものとなっている。すなわち、制約関数He*は、発電所ノードPiから需要ノードQkへ供給されるリソースの大きさに関する関数と、発電所ノードPiから蓄電器ノードBjへ供給されるリソースの大きさに関する関数と、蓄電器ノードBjから需要ノードQkへ供給されるリソースの大きさに関する関数とを含む。
【0124】
(c7:マイクログリッドについての制約関数の解法)
上述の(13)式に示すマイクログリッドについての目的関数Rの最小値を探索する方法としては、(1)複数の変数を同期的に順次更新する方法(同期的更新法)と、(2)複数の変数を異なるタイミングで更新する方法(非同期的更新法)とを採用することができる。
【0125】
(1)の方法については、上述の既存の電力システムについての目的関数R((3)式)の最小値を探索する方法と同様に、発電所ノードからの供給電力Piについて微小変化分ΔPi、および、各ノードにおける伝送率xjk,xik,xij,xj’j,xj’k,xijの各々についての微小変化分Δxjk,Δxik,Δxij,Δxj’j,Δxj’k,Δxijを同一ステップ内において一斉に更新していく。そして、最小値(収束値)を探索する。
【0126】
一方、(2)の方法については、各ステップにおいて、上述のようなパラメータのうち一部のみを更新する。
【0127】
以下、微小変換分の数学的な算出方法について説明する。
まず、発電所ノードからの供給電力Piについて微小変化分ΔPiについては、以下に示す(14)式に従って算出することができる。
【0128】
【数19】
【0129】
次に、各ノードにおける微小変化分Δxjk,Δxik,Δxij,Δxj’j,Δxj’k,Δxijについては、以下に示す(15)〜(20)式のように表すことができる。
【0130】
【数20】
【0131】
なお、周期的な発散を回避するために、上述の(5)式および(7)式と同様にして、定数ηを導入し、発電所ノードからの供給電力Piについて微小変化分ΔPi、および、各ノードにおける微小変化分Δxをスケーリングすることが好ましい。
【0132】
(c8:マイクログリッドについての制御手順)
図10に示すようなマイクログリッドについて、図11を参照して説明する。図11は、この発明の実施の形態に従う既存のマイクログリッドについての制御手順を示すフローチャートである。
【0133】
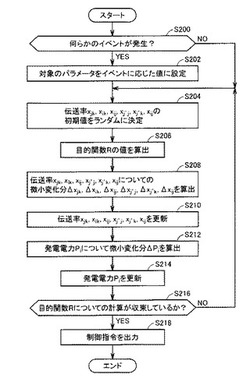
図10を参照して、まず、CPU120は、対象のマイクログリッドにおいて何らかのイベントが発生しているか否かを判断する(ステップS200)。このイベントとは、対象のマイクログリッドにおける各種パラメータを制約する事象を意味する。何らかのイベントが発生している場合(ステップS200においてYESの場合)には、CPU120は、対象のパラメータ(供給電力Piおよび伝送率xjk,xik,xij,xj’j,xj’k,xijのいずれか)をイベントに応じた値に設定する(ステップS202)。そして、処理はステップS204へ進む。
【0134】
これに対して、何らのイベントも発生していない場合(ステップS200においてNOの場合)には、ステップS202の処理はスキップされる。
【0135】
ステップS204において、CPU120は、伝送率xjk,xik,xij,xj’j,xj’k,xij(ステップS202において所定値に設定されているものを除く)のそれぞれの初期値をランダムに決定する(ステップS204)。
【0136】
CPU120は、電力の順伝搬の期間中、上述の(13)式を用いて、目的関数Rの値を算出する(ステップS208)。そして、CPU120は、上述の(15)〜(20)式を用いて、伝送率についての微小変化分Δxjk,Δxik,Δxij,Δxj’j,Δxj’k,Δxij(ステップS202において所定値に設定されているものを除く)を算出する(ステップS210)。その後、CPU120は、以下の式に従って、伝送率xjk,xik,xij,xj’j,xj’k,xij(ステップS202において所定値に設定されているものを除く)を更新する(ステップS210)。
【0137】
xjk(t+1)=xjk(t)+Δxjk
xik(t+1)=xik(t)+Δxik
xij(t+1)=xij(t)+Δxij
xj’j(t+1)=xj’j(t)+Δxj’j
xj’k(t+1)=xj’k(t)+Δxj’k
xij(t+1)=xij(t)+Δxij
また、CPU120は、上述の(14)式を用いて、供給電力Piについて微小変化分ΔPiを算出する(ステップS212)。その後、CPU120は、以下の式に従って、供給電力Piを更新する(ステップS214)。
【0138】
Pi(t+1)=Pi(t)+ΔPi
さらに、CPU120は、目的関数Rについての計算が収束しているか否かを判断する(ステップS216)。より具体的には、供給電力Piについて微小変化分ΔPi、および、伝送率についての微小変化分Δxjk,Δxik,Δxij,Δxj’j,Δxj’k,Δxijのいずれもが安定している、すなわち、変化量が所定のしきい値以下である場合には、収束していると判断される。そうでなければ、収束していないと判断される。
【0139】
目的関数Rについての計算が収束していない場合(ステップS216においてNOの場合)には、ステップS204以下の処理が繰返される。一方、目的関数Rについての計算が収束している場合(ステップS216においてYESの場合)には、算出された、供給電力Piおよび伝送率jk,xik,xij,xj’j,xj’k,xijとなるように制御指令を出力する(ステップS218)。すなわち、電力ネットワークにおける電力フローが制御される。
【0140】
なお、図11のフローチャートに示される処理手順は、所定周期あるいは何らかのイベント発生毎に実行される。
【0141】
<D.シミュレーション結果>
以下、上述したような目的関数を用いたシミュレーションを行なった結果を示す。
【0142】
(d1.既存の電力ネットワーク)
シミュレーションの条件としては、各制約関数(ペナルティー)の重みを規定する定数λ,μ,ν,ξは、いずれも「1」とした。また、燃料コストを定義する関数の定数ai,bi,ciについても、目的関数を簡素化する観点から、いずれも「1」とした。
【0143】
変電所/配電所ノードまたは蓄電器ノードの電力Bj、および、需要ノードの需要Qkについては、いずれも規格化(0≦Bj≦1,0≦Qk≦1)した値を用いた。その上で、最小許容電力Bjmin=「0.2」、および、最大許容電力Bjmax=「0.8」とした。また、需要電力Dk=「0.2」、および、最大許容電力Qkmax=「0.8」とした。
【0144】
その他のパラメータとしては、制約関数Hp*を定義する定数αp=「0.5」とし、制約関数Hv*(制約関数HBおよび制約関数HQ)を定義する定数αB=αQ=「4.0」とし、制約関数He*を定義する定数βe=「0.05」、および、定数γe=「0.5」とした。
【0145】
さらに、周期的な発散を回避するための1次近似に用いられる定数η0=「0.01」とし、ノード間の電力フローの係数cij,cjk,cik,cj’j,cj’k,cij’=「1.0」とした。
【0146】
既存の電力ネットワークについてのシミュレーション対象として、2つの発電所ノード、3つの変電所/配電所ノード、および5つの需要ノードが存在する構成とした。発電所ノードからの供給電力Pi、発電所ノードと変電所/配電所ノードとの間の電力伝送効率wij、および変電所/配電所ノードと需要ノードとの間の電力伝送効率wjkに関して同期的に変化させて、目的関数Rの値の変化を観測した。
【0147】
図12は、既存の電力ネットワークについてのシミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。図13は、既存の電力ネットワークについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図14は、既存の電力ネットワークについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0148】
図12に示すように、発電所ノードからの供給電力Piがシミュレーション開始後100ステップ(収束計算回数:100)で急激に増加して、「1.2」まで到達していることがわかる。また、図13に示すように、発電所ノードと変電所/配電所ノードとの間の電力伝送効率wij、および、変電所/配電所ノードと需要ノードとの間の電力伝送効率wjkについても、シミュレーション開始後100ステップ(収束計算回数:100)で安定値に収束していることがわかる。
【0149】
その結果、図14に示すように、目的関数Rの値についても単調に減少し、シミュレーション開始後100ステップ(収束計算回数:100)で「15」程度の安定点に到達していることがわかる。
【0150】
図12〜図14に示すシミュレーション結果から、本実施の形態に従う目的関数を用いることで、短時間で、既存の電力システムにおける適切な解を決定することができるといえる。
【0151】
(d2.マイクログリッド)
シミュレーションの条件としては、上述の既存の電力ネットワークについてのシミュレーションと同様の条件を採用した。
【0152】
マイクログリッドについてのシミュレーション対象として、図10に示すような、1つの発電所ノード(供給電力Pi)、4つの蓄電器ノード(電力Bj)、および3つの需要ノード(需要Qk)が存在する構成とした。発電所ノードからの供給電力Pi、発電所ノードPiと蓄電器ノードBjとの間の電力伝送効率wij、および蓄電器ノードBjと需要ノードQkとの間の電力伝送効率wjk、発電所ノードPiと需要ノードQkとの間の電力伝送効率wikに関して同期的に変化させて、目的関数Rの値の変化を観測した。
【0153】
図15は、マイクログリッドについてのシミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。図16は、マイクログリッドについてのシミュレーションによって観測された需要ノードQkの時間変化を示すグラフである。図17は、マイクログリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図18は、マイクログリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0154】
図15に示すように、発電所ノードからの供給電力Piが1800ステップ(収束計算回数:1800)で急激に増加して、「2.2」まで到達していることがわかる。また、図16に示すように、需要ノードにおける需要Qkの値が単調に増加して、「0.35」まで到達していることがわかる。
【0155】
図17に示すように、1%のノイズや10%の初期値が加算された場合であっても、電力ノード間におけるすべての電力伝送効率wij,wjk,wikは、いずれも0.1〜0.2の範囲内の安定値に収束していることがわかる。図18に示すように、目的関数Rの値についてもなめらかに減少して、「25」程度の安定点に到達していることがわかる。
【0156】
図15〜図18に示すシミュレーション結果から、本実施の形態に従う目的関数を用いることで、短時間で、かつ、初期値の設定に関係なく安定して、マイクログリッドにおける適切な解を決定することができるといえる。
【0157】
(d3.マイクログリッド(事故発生時))
次に、上述のマイクログリッドについてのシミュレーションにおいて、事故が発生した場合の時間変化を観察した。より具体的には、2500ステップにおいて、発電所ノードPiと需要ノードQkとの間を遮断(電力伝送効率wik=0(open))した。
【0158】
図19は、マイクログリッドについての事故シミュレーションによって観測された需要ノードQkの時間変化を示すグラフである。図20は、マイクログリッドについての事故シミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。図21は、マイクログリッドについての事故シミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図22は、マイクログリッドについての事故シミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0159】
図19に示すように、発電所ノードからの電力が需要ノードには直接的に供給されなくなるので、需要Qkは、事故の発生した2500ステップにおいて、瞬間的に減少している。これに対して、発電所ノードからの供給電力Piは、わずかに変動するのみである。これは、他の需要ノードや蓄電器ノードへバイパス経路を通してその発生する電力を供給し続けるからである。
【0160】
「0」に設定される電力伝送路wikを除いて、他の電力伝送路wij,wjk,wij’wj’kといった迂回伝送路によって電力供給が回復する。図21には、発電所ノードPiと需要ノードQkとの間の電力伝送効率がバイパス経路を通して時間とともに回復する状態が示されている。すなわち、電力伝送効率wikは、2500ステップで「0」に減少した後でも、3600ステップの時点あたりで、他の迂回伝送路の電力伝送効率wij,wjkが正の値まで上昇することにより電力供給を回復していることがわかる。
【0161】
一方、図22に示すように、このような事故が発生した場合であっても、目的関数Rの値は若干の増加をするもののほとんど変動をしていないことがわかる。
【0162】
(d4.スマートグリッド)
次に、既存の電力ネットワークに統合されたスマートグリッドについてシミュレーションを行なった結果を示す。
【0163】
図23は、既存の電力ネットワークに複数のマイクログリッドが統合された構成例について模式的に示す図である。すなわち、図23に示す構成例は、発電所ノードを頂点として、第1階層(layer#1)に位置する2つの変電所ノードと、第3階層(layer#3)に位置する3つの変電所ノードとを含むパワーネットワークを含む。このパワーネットワークが既存の電力システムに相当する。この既存の電力システムに、3つのマイクログリッド(マイクログリッド#1,#2,#3)が結合されている。なお、図23においては、説明の便宜上、各ノードに番号を付している。
【0164】
図23に示す構成においても、電力伝送路wと電力供給・需要制御システムを実現するための通信ネットワーク(コンピュータ・ネットワーク)は、ミドルウェア層(詳細については後述する)を通じて一体化されている。
【0165】
シミュレーションの条件としては、ペナルティーの重みを規定する定数λ,μ,νは、いずれも「1.4」とし、定数ξは「1」とした。また、燃料コストを定義する関数の定数ai,bi,ciについても、目的関数を簡素化する観点から、いずれも「1」とした。
【0166】
変電所/配電所ノードまたは蓄電器ノードの電力Bj、および、需要ノードの需要Qkについては、いずれも規格化(0≦Bj≦1,0≦Qk≦1)した値を用いた。その上で、最小許容電力Bjmin=「0.2」、および、最大許容電力Bjmax=「0.8」とした。また、需要電力Dk=「0.2」、および、最大許容電力Qkmax=「0.8」とした。
【0167】
その他のパラメータとしては、制約関数Hp*を定義する定数αp=「0.22」とし、制約関数Hv*(制約関数HBおよび制約関数HQ)を定義する定数αB=αQ=「4.0」とし、制約関数He*を定義する定数βe=「0.05」、および、定数γe=「0.5」とし、制約関数Hs*を定義する定数βs=「0.15」とした。
【0168】
さらに、周期的な発散を回避するための1次近似に用いられる定数η0=「0.01」とした。
【0169】
上述のシミュレーションと同様に、発電所ノード(ノード1)からの供給電力Pi、および、ノード間における電力伝送効率wを同期的に変化させて、目的関数Rの値の変化を観測した。さらに、上述のシミュレーションと同様に事故が発生した場合の挙動についても観測した。具体的には、シミュレーション開始後250ステップにおいて、配電所ノードP’iと蓄電器ノードBjとの間を遮断(電力伝送効率wij=0(open))した。
【0170】
同期的更新法により、パラメータを同期的に更新した場合のシミュレーション結果を図24〜図27に示す。
【0171】
図24は、スマートグリッドについてのシミュレーションによって観測された発電所ノード(ノード1)からの供給電力Piの時間変化を示すグラフである。図25は、スマートグリッドについてのシミュレーションによって観測された蓄電器(ノード17)へ供給される電力Bjの時間変化を示すグラフである。図26は、スマートグリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図27は、スマートグリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0172】
図24に示すように、発電所ノードからの供給電力Piは単調に増加して、シミュレーション開始後120ステップ(収束計算回数:120)で「2.2」の安定値まで到達していることがわかる。また、図25に示すように、蓄電器(たとえば、ノード17)へ供給される電力Bjは、電力Bjの最小値(すなわち、最小許容電力Bjmin)を満たすように徐々に増加していることがわかる。
【0173】
さらに、図26に示すように、電力ノード間におけるすべての電力伝送効率wij,wjk,wikは、いずれも0.0〜0.25の範囲内の安定値に収束していることがわかる。図27に示すように、目的関数Rの値についてもなめらかに減少して、「150」程度の安定点に到達していることがわかる。
【0174】
次に、上述のマイクログリッドについてのシミュレーションにおいて、250ステップの時点で事故が発生した場合を仮定する。すなわち、250ステップにおいて、配電所ノードP’iと蓄電器ノードBjとの間を遮断(電力伝送効率wij=0(open))した。
【0175】
図26に示すように、配電所ノードP’i(ノード8)からの電力が蓄電器ノードBj(ノード17)には直接的に供給されなくなるので、図25に示すように蓄電器ノードBjでの電力は、事故の発生した250ステップにおいて、瞬間的に減少している。これに対して、発電所ノードからの供給電力Piは、わずかに変動するのみである。
【0176】
「0」に設定される電力伝送路wikを除いて、迂回伝送路によって電力供給が回復する。図26には、配電所ノードP’iと蓄電器ノードBjとの間の電力伝送効率wijが時間とともに回復する状態が示されている。すなわち、電力伝送効率wijは、250ステップで一旦「0」に減少した後に、迂回伝送路を経由する電力伝送効率は上昇している。すなわち、電力供給が迂回伝送路経由で回復していることがわかる。
【0177】
一方、図27に示すように、このような事故が発生した場合であっても、目的関数Rの値はほとんど変動をしていないことがわかる。このシミュレーションによって、マイクログリッドのロバスト性(頑健性)が示される。
【0178】
次に、上述と同様の条件で、制御変数を任意のタイミングで更新する非同期的更新法を用いたシミュレーション結果を図28〜図31に示す。
【0179】
図28は、スマートグリッドについてのシミュレーションによって観測された発電所ノード(ノード1)からの供給電力Piの時間変化を示すグラフである。図29は、スマートグリッドについてのシミュレーションによって観測された蓄電器(ノード17)へ供給される電力Bjの時間変化を示すグラフである。図30は、スマートグリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図31は、スマートグリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0180】
図28〜図31についても、上述の図24〜図27にそれぞれ示すシミュレーション結果と同様の結果となっている。
【0181】
<E.その他の考慮事項>
(e1.需要の時間的変動)
上述の実施の形態においては、いくつかの制約条件下でモデル化したものであるが、一般的には、目的関数Rは、時間的に変化する非線形の関数となる。たとえば、需要電力Dkは、時間とともに常に変化する。たとえば、日中には需要電力Dkが増大し、夜間には減少するといったパターンを有する。
【0182】
このような条件下においては、たとえば、時間的に変動する需要電力Dk(t)として、以下のような関数を採用することができる。
【0183】
【数21】
【0184】
ここで、akは振幅を示し、θkはk番目の需要ノードの位相を示し、bkはオフセットである、最大許容電力Qkmaxに対して20%程度の余裕を持たせているため、ε=0.8としている。
【0185】
需要電力Dk(t)が時間的に変動すると、上述の目的関数Rを最小化する収束計算が再度実行され、目的関数Rの値が最小化するように、電力フローの状態も変化する。
【0186】
本実施の形態に従う電力供給・需要制御システムにおいては、発電所ノードからの供給電力Pi、および、伝送率xij,xjk,xikを適宜更新することで、このような電力需給状態の変動に対応する。
【0187】
なお、時間的に変動する需要電力Dk(t)としては、上述のような固定された関数ではなく、後述するように、学習制御によって各需要ノードにおける変動モデルを推定し、この推定された変動モデルを用いて制御を行なってもよい。
【0188】
(e2.再生可能エネルギー源の存在)
再度図10を参照して、蓄電器ノードBjが発電所ノードPiの側に所属し、蓄電器ノードBj’が需要ノードQkの側に所属する場合において、蓄電器ノードBjが充電されるときには、電力伝送効率wj’jは、蓄電器ノードBj’から蓄電器ノードBjへの電力供給経路に相当する。この状況は、需要家Qkが蓄電器Bj’から蓄電器Bjを通して、電力供給側Piに売電する場合に対応する。
【0189】
ここで、蓄電器ノードまたは需要ノードに、他の蓄電器ノードまたは発電所ノードからの電力を受け入れる十分な能力が存在しない場合には、蓄電器ノードの最大許容電力Bjmaxは、以下のような関数を採用することにより、その最大蓄電能力を増大することができる。
【0190】
【数22】
【0191】
すなわち、目的関数Rの収束計算時には、以下のような数式に従って、最大許容電力Bjmaxを順次更新する。
【0192】
Bjmax(t+1)=Bjmax(t)+ΔBjmax
同様に、需要ノードの最大許容電力Qkmaxは、以下のような関数を採用することにより、その最大許容電力を増大することができる。
【0193】
【数23】
【0194】
すなわち、目的関数Rの収束計算時には、以下のような数式に従って、最大許容電力Qkmaxを順次更新する。
【0195】
Qkmax(t+1)=Qkmax(t)+ΔQkmax
上述のような関数を採用することで、スマートグリッドの構成として、太陽光発電、風力発電、バイオマス発電といった再生可能な自然エネルギー源が含まれていた場合であっても、適切な電力供給・需要制御が可能となる。
【0196】
(e3.スマートグリッドのトポロジー変化)
特にスマートグリッドにおいては、容易に、小規模な電力源(発電所)が追加されたり、蓄電器(バッテリ)が追加されたりする。あるいは、何らかの事故や補修などによって、電力供給経路(電力ネットワーク・ケーブル)が遮断されることもある。
【0197】
このような場合、スマートグリッドの全体としてみれば、トポロジーが変化することになる。このような場合であっても、本実施の形態に従う電力供給・需要制御システムにおいては、目的関数Rに含まれる伝送率xijおよびxjkのうち、対応するものの値を、遮断状態を示す「0(open)」、または、導通状態を示す「1(close)」のいずれかに固定することで、このようなトポロジー変化についても容易に対処することができる。
【0198】
<F.学習による負荷変動予想>
上述のような電力供給・需要制御は、図1に示すフィールドコントローラなどからなる物理層、および図2に示すコントローラ100などからなる制御プレーン(Control Plane)などの階層構造によって実現される。
【0199】
このような階層構造に対して、需要の将来的な変動を予測するための予測学習層を追加することもできる。
【0200】
(f1.アーキテクチャ)
図32は、本実施の形態に従う需要予測をするためのサービス層を統合したネットワーク・アーキテクチャの例を模式的に示す図である。
【0201】
図32に示すネットワーク・アーキテクチャは、現実のスマートグリッドを監視制御するためのスマートグリッド層(Smart Grid Layer)がある。このスマートグリッド層は、本ネットワーク・アーキテクチャの最下層に位置する物理層である。
【0202】
一方、本ネットワーク・アーキテクチャの最上層には、需要の将来的な変動を予測するための予測学習層が位置している。この予測学習層は、ネットワーク階層でいうところの、アプリケーション層またはサービス層に対応する。
【0203】
さらに、スマートグリッド層と予測学習層との間には、両者を統合するためのミドルウェア層(Middle Ware Layer)が位置する。ミドルウェア層は、厳密には、擬似レイヤーとして実装され、予測学習層により予測された需要の将来的な変動の学習値(関数)に基づいて、スマートグリッド層における電力フローを制御する。すなわち、上述した、目的関数Rが最小値をとるように、収束演算などを行なう。
【0204】
なお、ミドルウェア層は、スマートグリッド層の需要ノードまたは蓄電器ノードにおいて、電力需要に対する要求が満たされない場合などには、制御誤差信号を予測学習層にフィードバックすることで、予測精度を高めることができる。また、ミドルウェア層は、スマートグリッド層に何らかの新たなノードが追加された場合には、その追加された内容を予測学習層に通知する。予測学習層は、仮想ネットワークのトポロジーを変更することで、このスマートグリッド層でのノード構成の変更に対処する。
【0205】
なお、図32に示す例は、既存のネットワーク・アーキテクチャに実装する例を示すが、現在研究開発が行なわれており、4〜5年後に実用化が見込まれている新世代ネットワークに実装する場合は、図33に示すようなアーキテクチャを採用することができる。
【0206】
図33は、本実施の形態に従うシステムを新世代ネットワークに実装した場合のネットワーク・アーキテクチャの例を模式的に示す図である。図33を参照して、予測学習層は、新世代ネットワーク・アーキテクチャの再上位に位置するサービス層の中に実装される。
【0207】
なお、新世代ネットワーク・アーキテクチャでは、現実にパケットが遣り取りされる物理層(Substrate Layer)の上位に仮想ネットワーク層(Virtualization Layer)が配置され、同一の物理的主体に対して多数のノードを仮想的に設けることができる。
【0208】
(f2.予測学習層のネットワーク構成)
図34は、本実施の形態に従う予測学習層を実現するためのネットワーク構成を模式的に示す図である。
【0209】
図34に示すネットワークは、複数の仮想ノードを含んで構成される。このネットワーク中の各仮想ノードは、計算および学習に関する処理、および、アルゴリズム構築に関する処理を実行する。この計算および学習に関する処理としては、エージェント生成、データ転送、定数値補正などの処理が含まれる。また、アルゴリズム構築に関する処理としては、ノードおよびエッジの生成/削除といったトポロジー変更に関する処理を含む。
【0210】
また、このネットワークは、仮想ノードに加えて、ユーザノードを含む。このユーザノードは、現実のユーザデータ(スマートグリッドにおいては電力フローに関する各種検出値)を収集し、あるいは、予測学習処理のフロントエンドとして入力データ/教師データの処理/管理を行なう。
【0211】
このようなネットワークおよびそれに含まれる仮想ノードを用いた予想学習処理を実現するための基本的な思想は、本願出願人らが先に出願した特願2008−274282号の明細書に詳述に記載されているのでそちらを参照されたい。
【0212】
この特願2008−274282号に開示されている「アルゴリズム可変ネットワーク(Algorism Transitive Network:ATN)」を用いて、本実施の形態に従う予測学習処理を実現する。すなわち、図34に示すようなネットワークを物理的または仮想的に構築するとともに、予測学習層(図33)は、ユーザノードから入力された情報を教師としてアルゴリズム学習を行ない、需要の時間的変動に関する内部モデルを構築する。
【0213】
(f3.アルゴリズム学習)
図35は、本実施の形態に従うアルゴリズム学習における動作を模式的に示す図である。本実施の形態においては、図32に示すように、スマートグリッド層(電力ネットワーク)と予測学習層とが統合された状態において、ユーザノードから対象となる需要家(負荷サイト)からの情報を入力/教師データとして与える。すると、生成されたエージェントに従って、ネットワークの仮想ノード間をパケットが順次伝播(順伝播および逆伝播)することで学習が行なわれる。充分な時間の経過後には、内部モデル(アルゴリズム)が得られる。この内部モデルは、学習の結果得られた需要の特性を示す関数に相当する。
【0214】
なお、図35に示すようなアルゴリズム学習については、需要家の別にそれぞれ独立に設けることが好ましい。
【0215】
このような内部モデル(アルゴリズム)が一旦構築されると、この情報に基づいて、上述した目的関数Rを用いた電力供給・需要制御が実行される。すなわち、各需要の時間的変化を示す関数を目的関数Rに含めた上で、目的関数Rの値が最小化するように、順次制御を実行する。
【0216】
なお、ユーザノードから入力する教師データとしては、現実の需要の大きさ(の時間変化)に加えて、需要の大きさに影響を与えるような、すなわち、需要と相関関係の高いデータを入力することが好ましい。このような需要と相関関係の高いデータとしては、以下のようなものから任意に選択することができる。
【0217】
・地理情報(緯度、経度、高度)
・時刻情報(年、月、日、時、分、秒)
・気温(最高気温、最低気温、平均気温)、日照時間、気圧、湿度
・降水量、氷、霜、霧、雪の量
・風向、風速
・気象衛星からの衛星画像データ
・天気図、天気予報、週間天気予報、季節情報、台風情報など
・過去の気象データ
・地球環境データバンク情報(地球温暖化データ、温室効果ガスの状況、エルニーニョ現象の発生有無、ラニーリャ現象の発生有無、ヒートアイランド情報、黄砂情報、紫外線観測データ、オゾン層の状況など)
・太陽黒点情報、火山噴火予報・警報など
・海洋データ(海水温、海洋の温室効果ガスなど)
内部モデル(アルゴリズム)は、これらの教師データとして入力された情報と高い相関を有する関数として生成される。
【0218】
なお、上述の例では、需要の時間的変動を予測学習する場合について例示したが、サービスノード(主として、電力供給ノード)からの供給量の時間的変動を予測学習することもできる。たとえば、需要家であっても、太陽光発電によって発生した余剰電力を電力供給側の電力会社に供給する場合もあるので、このような時間的に変動し得るパラメータについては、上述したアルゴリズム学習を用いて、その特性を示す内部モデルを作成することができる。
【0219】
したがって、このようなモデルが一旦構築されると、上述の目的関数Rを用いて電力フローを決定するロジックを用いて、近未来の電力需給状態に応じた適切な制御を行なうことができる。すなわち、近未来における、需要ノードでの使用電力の増大、あるいは、再生可能な自然エネルギー源の発電量の減少といった事象を考慮して、予め、発電所の発電量を増大させ、あるいは、蓄電器(バッテリ)からの放電量を増大させておくことができる。いわば、各ユーザの別に、電力需要情報を先取りして供給できるようになる(電力需要への先取り供給システム)。
【0220】
すなわち、図32および図33に示すシステムにおいては、需要ノードに関する現実の情報を取得して学習することにより、需要ノードで消費される電力(リソース)の大きさの時間に関する特性関数を決定する手段を有する。そして、目的関数の値を算出する際には、この特性関数により決定される未来のリソース消費量に基づいて、目的関数Rの値が算出される。
【0221】
より具体的には、上述したような需要と相関関係の高いデータを内部モデルとして予め自動的に学習することにより、変電所/配電所ノードに関する最大許容電力Bjmaxおよび最小許容電力Bjmin、ならびに、最大許容電力Qkmaxおよび需要電力Dkの値を随時更新することで、目的関数を環境に適合させて動的に変更することができる。
【0222】
(f4.実装例)
図36は、本実施の形態に従うアルゴリズム学習における実装例を模式的に示す図である。たとえば、入力データ/教師データとして、n次のベクトル量x={xi;1≦i≦n}の値が時系列に取得できるとする。すなわち、ベクトル量x(t)={xi(t)}が与えられるとする。
【0223】
このような場合、たとえば、10単位時間分のベクトル量x(t),x(t−1),…,x(t−9)は、図36に示すように、ユーザノードへ並列的に入力される。このようなベクトル量の入力が所定の時間繰返されながら前述のアルゴリズム学習が行われることで、内部モデルが作成される。
【0224】
<G.その他の適用例>
(g1.ミドルウェア層の実装)
上述の実施の形態においては、電力供給・需要制御システム(ミドルウェア層)を図2に示すようなコントローラ100を用いて実装する例について説明したが、予測学習層を実現するためのアルゴリズム可変ネットワーク(ATN)と同様のコンピュータ・ネットワークを用いて構成することもできる。
【0225】
この場合には、たとえば、図33に示すアーキテクチャにおいて、アプリケーション・レイヤーのすぐ下のところで動作するプログラムとして実装し、それによりインターネット上のオーバーレイ・ネットワーク(仮想ネットワーク層)中に、コンピュータ・ネットワークを構築する。
【0226】
この場合には、たとえば、発電所の供給電力についての制御を行なう制御信号は、仮想ネットワーク上を通信パケットの形で順次転送される。また、蓄電器ノードBjや需要ノードQkは、それぞれのユーザノードに対応する場所に位置することになる。
【0227】
また、管理者ノードでは、電力供給のネットワークが正常に動作していることを監視する。もし、災害などが原因で停電事故が起こると、直ちに迂回伝送路を通じて自動的に電力供給が復元される。このとき、各ノードの状態やシステム全体の目的関数Rの値を用いて、電力供給のネットワークが正常に回復されたかどうかを管理ノードにおいてモニタすることもできる。
【0228】
特願2008−274282号の明細書に詳述されているように、アルゴリズム可変ネットワーク(ATN)では、演算ノードとデータ転送エッジとからなるネットワークでアルゴリズムが表される。そして、計算処理は、データフロー(エージェント・フロー)方式により大規模・超並列・非同期的に進められる。さらに、アルゴリズム可変ネットワーク(ATN)では、誤差逆伝播学習による定数値補正とエッジ繋ぎ変えとにより、アルゴリズムが実行中に改変できるというメリットがある。
【0229】
(g2.その他の適用例)
上述の実施の形態においては、リソース(資源)の一例として電力に適用する例について説明したが、地球上に散在する自然産物、一般的な商品、希少金属などをリソースとした場合も適用できる。
【0230】
この場合には、上述の発電所ノードPiが生産地に対応付けられ、変電所/配電所ノードまたは蓄電器ノードBjが配送センターに対応付けられ、需要ノードQkが消費者に対応付けられる。また、電力伝送効率wijが輸送コストに対応付けられる。
【0231】
さらに、上述したような学習制御(サービス層)を組み合わせることで、需要が大きすぎてリソース(資源)の提供が不足するような場合であっても、動的なリソース配分を行なうことができる。
【0232】
<H.作用効果>
本実施の形態によれば、電力供給・需要制御システムにおいて、ユーザ(電力供給側および電力需要側の双方を含む)の利便性向上、電力負荷変動など環境変動への適応性、突発的な事故などへの耐故障性、システム運用管理の柔軟性などの種々の性能向上を図ることができる。すなわち、より完成度の高いネットワークベースの電力供給・需要制御システムを実現するために、設計段階から、多面的な検討を行なうことができる。それによって、現在開発が行われつつあるGreen ICT関連技術の質をさらに向上させることができる。
【0233】
また、学習制御によって各需要ノードにおける変動モデルを推定することで、設計方針を供給するのみならず、全体システムの運用における性能を向上することができる。
【0234】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて請求の範囲によって示され、請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0235】
10,20,30,30 フィールドコントローラ、11,21,31,42 ネットワークI/F、12,22,32 センサ、13,23,33 アクチュエータ、100 コントローラ、102 コンピュータ本体、104 モニタ、105 バス、106 フレキシブルディスク(FD)ドライブ、108 光ディスクドライブ、110 キーボード、112 マウス、118 ROM、120 CPU、122 メモリ、124 ハードディスク、128 通信インターフェイス、131 目的関数生成モジュール、132 目的関数算出モジュール、133 変数更新モジュール、134 収束モジュール判断、134 収束判断モジュール、135 パラメータファイル。
【技術分野】
【0001】
本発明は、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおけるリソースの配分に係る演算処理を行なうシステムおよびリソース配分を決定する方法に関する。
【背景技術】
【0002】
従来から、電力を供給するための電力網と音声・データを交換するための通信網とは互いに独立して敷設および維持されてきた。現在、エネルギーを効率的に利用することを目的として、Green ICT(Information and Communications Technology:情報通信技術)と呼ばれる技術が注目を集めている。
【0003】
このGreen ICTでは、インターネットに代表される情報通信ネットワークと、主に電力会社が運用する電力網(パワーネットワーク)とを共通のネットワークに統合することが計画されている。さらに、太陽光発電、風力発電、バイオマス発電といったGreenエネルギー源(再生可能な自然エネルギー源)や、HV(Hybrid Vehicle:ハイブリッド自動車)やEV(Electric Vehicle:電気自動車)に搭載される蓄電器(バッテリ)などの、分散して存在するエネルギー源を、ネットワークを介して統合することが計画されている。
【0004】
このようなエネルギー源の統合によって、全体として、安定した需要/供給システムを構築することができる。さらに、電力供給の季節変動や突発的な故障に対する緊急の電力需要に対しても、広く分散している余剰電力を活用することもできる。
【0005】
上述のGreen ICTに関するものではないが、特許文献1(特開平10−276458号公報)には、電源異常発生時に代替的キャリアネットワークへ自動的に切り換える構成が開示されている。自動的に切り換える構成を採用することで、ユーザが高価なバックアップ電力供給システムに投資または介入する必要をなくすことができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−276458号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、現状では、上述のようなシステムは未だ計画中ないし研究開発が開始されたばかりのものであり、これから開発すべき課題は山積している。すなわち、電力需要および供給負荷分散の動的スケジューリングや、将来あるべき理想的な運用システムの設計方針といった具体的な内容については、まだ調査・検討段階に過ぎない。
【0008】
本発明は、上記のような問題を解決するためになされたものであって、その目的は、典型的には、電力を発生して負荷で消費するような、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおいて、リソースの配分に係る演算処理を行なうシステムおよびリソース配分を決定する方法を提供することである。
【課題を解決するための手段】
【0009】
この発明のある局面に従えば、リソースを発生する第1のノードとリソースを消費する第2のノードとを含むネットワークにおけるリソースの配分に係る演算処理を行なうシステムを提供する。本システムは、目的関数を保持する手段を含む。目的関数は、リソースの大きさに関して単調増加する、第1のノードから供給されるリソースに必要なコストの値を出力する第1の関数と、第1のノードで発生したリソースのうち第2のノードへ供給されるリソースの大きさと、第2のノードで消費されるリソースの大きさとの差が大きくなるほどより大きな値を出力する、第1のノードから第2のノードへのリソースの経路における伝送率を変数として有する第2の関数とを含む。本システムは、さらに、第1のノードで発生するリソースの大きさを示す変数と、伝送率を示す変数とに基づいて目的関数の値を算出する手段と、目的関数をリソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけリソースの大きさを示す変数を更新する手段と、目的関数を伝送率を示す変数で偏微分して得られる微分値に応じた値だけ伝送率を示す変数を更新する手段と、更新後の値に基づいて、目的関数の値の算出を繰返す手段と、目的関数の算出処理が収束したときの、リソースの大きさおよび伝送率を出力する手段とを含む。
【0010】
好ましくは、目的関数は、第1のノードで発生するリソースの大きさがゼロに近付くほどより大きな値を出力する第3の関数をさらに含む。
【0011】
好ましくは、目的関数は、伝送率が「0」または「1」に近いほどより小さな値を出力する第4の関数をさらに含む。
【0012】
好ましくは、目的関数の値が新たに算出される前に、リソースの大きさを示す変数、および、伝送率を示す変数のいずれもが更新される。
【0013】
あるいは、好ましくは、目的関数の値が新たに算出される前に、リソースの大きさを示す変数、および、伝送率を示す変数のいずれか一方が更新される。
【0014】
好ましくは、算出される目的関数の値が最小値を実質的に維持する状態になった場合に、目的関数の算出処理が収束したと判断する。
【0015】
好ましくは、ネットワークは、リソースを中継、または、リソースを蓄える第3のノードをさらに含む。第2の関数は、第1のノードから第3のノードへ供給されるリソースの大きさに関する関数と、第1のノードから第2のノードへ供給されるリソースの大きさに関する関数と、第3のノードから第2のノードへ供給されるリソースの大きさに関する関数とを含む。
【0016】
好ましくは、本システムは、第2のノードに関する現実の情報を取得して学習することにより、第2のノードで消費されるリソースの大きさの時間に関する特性関数を決定する手段をさらに含む。目的関数の値を算出する手段は、特性関数により決定される未来のリソース消費量に基づいて、目的関数の値を算出する。
【0017】
好ましくは、ネットワークは、電力を供給するネットワークに対応付けられている。
この発明の別の局面に従えば、リソースを発生する第1のノードとリソースを消費する第2のノードとを含むネットワークにおけるリソース配分を決定する方法を提供する。本方法は、演算処理装置が、目的関数を保持するステップを含む。目的関数は、リソースの大きさに関して単調増加する、第1のノードから供給されるリソースに必要なコストの値を出力する第1の関数と、第1のノードで発生したリソースのうち第2のノードへ供給されるリソースの大きさと、第2のノードで消費されるリソースの大きさとの差が大きくなるほどより大きな値を出力する、第1のノードから第2のノードへのリソースの経路における伝送率を変数として有する第2の関数とを含む。本方法は、さらに、演算処理装置が、第1のノードで発生するリソースの大きさを示す変数と、伝送率を示す変数とに基づいて目的関数の値を算出するステップと、目的関数をリソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけリソースの大きさを示す変数を更新するステップと、目的関数を伝送率を示す変数で偏微分して得られる微分値に応じた値だけ伝送率を示す変数を更新するステップと、更新後の値に基づいて、目的関数の値の算出を繰返すステップと、目的関数の算出処理が収束したときの、リソースの大きさおよび伝送率を出力するステップとを含む。
【発明の効果】
【0018】
本発明によれば、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおいて、リソースの配分を適切に行なうことができる。
【図面の簡単な説明】
【0019】
【図1】本実施の形態に従う電力供給・需要制御システムの構成を示す模式図である。
【図2】本実施の形態に係るコントローラのハードウェア構成を示すブロック図である。
【図3】既存の電力ネットワークの発展例について模式的に示す図である。
【図4】既存の電力システムにおける典型的なモデルを示す図である。
【図5】本発明の実施の形態に従う制約関数Hp*の一例を示す図である。
【図6】本発明の実施の形態に従う制約関数HBおよび制約関数HQの一例を示す図である。
【図7】本発明の実施の形態に従う制約関数He(Wi)の一例を示す図である。
【図8】本発明の実施の形態に従う制約関数Hsの一例を示す図である。
【図9】この発明の実施の形態に従う既存の電力システムについての制御手順を示すフローチャートである。
【図10】マイクログリッドの一例について模式的に示す図である。
【図11】この発明の実施の形態に従う既存のマイクログリッドについての制御手順を示すフローチャートである。
【図12】既存の電力ネットワークについてのシミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。
【図13】既存の電力ネットワークについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。
【図14】既存の電力ネットワークについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【図15】マイクログリッドについてのシミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。
【図16】マイクログリッドについてのシミュレーションによって観測された需要ノードQkの時間変化を示すグラフである。
【図17】マイクログリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。
【図18】マイクログリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【図19】マイクログリッドについての事故シミュレーションによって観測された需要ノードQkの時間変化を示すグラフである。
【図20】マイクログリッドについての事故シミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。
【図21】マイクログリッドについての事故シミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。
【図22】マイクログリッドについての事故シミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【図23】既存の電力ネットワークに複数のマイクログリッドが統合された構成例について模式的に示す図である。
【図24】スマートグリッドについてのシミュレーションによって観測された発電所ノード(ノード1)からの供給電力Piの時間変化を示すグラフである(同期モードの場合)。
【図25】スマートグリッドについてのシミュレーションによって観測された蓄電器(ノード17)へ供給される電力Bjの時間変化を示すグラフである(同期モードの場合)。
【図26】スマートグリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである(同期モードの場合)。
【図27】スマートグリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである(同期モードの場合)。
【図28】スマートグリッドについてのシミュレーションによって観測された発電所ノード(ノード1)からの供給電力Piの時間変化を示すグラフである(非同期モードの場合)。
【図29】スマートグリッドについてのシミュレーションによって観測された蓄電器(ノード17)へ供給される電力Bjの時間変化を示すグラフである(非同期モードの場合)。
【図30】スマートグリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである(非同期モードの場合)。
【図31】スマートグリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである(非同期モードの場合)。
【図32】本実施の形態に従う需要予測をするためのサービス層を統合したネットワーク・アーキテクチャの例を模式的に示す図である。
【図33】本実施の形態に従うシステムを新世代ネットワークに実装した場合のネットワーク・アーキテクチャの例を模式的に示す図である。
【図34】本実施の形態に従う予測学習層を実現するためのネットワーク構成を模式的に示す図である。
【図35】本実施の形態に従うアルゴリズム学習における動作を模式的に示す図である。
【図36】本実施の形態に従うアルゴリズム学習における実装例を模式的に示す図である。
【発明を実施するための形態】
【0020】
本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中の同一または相当部分については、同一符号を付してその説明は繰返さない。
【0021】
本実施の形態においては、リソースを発生するノードとリソースを消費するノードとを含むネットワークにおけるリソースの配分に係る演算処理の典型例として、電力を供給するネットワーク(既存の電力ネットワーク、マイクログリッド、スマートグリッドなど)について例示する。すなわち、リソースが「電力」に相当し、リソースを発生するノードが「発電所」などの電力を発生する主体に相当し、リソースを消費するノードが「負荷」や「需要」などの電力を消費する主体に相当する。そして、電力を供給するネットワークにおける状況に応じて、発生される電力の配分や、消費される電力の配分といった決定を行なう。
【0022】
本発明は、電力を供給するネットワークだけでなく、ネットワーク内でリソースが発生し、伝送され、そして消滅するような形態が存在するネットワークであれば、様々な用途に用いることができる。
【0023】
たとえば、後述するように、地球上に散在する自然産物、一般的な商品、希少金属などを「リソース(資源)を発生するノード」とみなした場合に、これらの資源を消費する消費者を「リソースを消費するノード」とみなすことができる。そして、本発明は、これらのリソースについての、需要/供給に関する最適予測配分ネットワーク・サービスシステムや、物流システムに適用できる。
【0024】
<A.システム構成>
まず、本実施の形態に従う電力供給・需要制御システムのシステム構成について説明する。
【0025】
図1は、本実施の形態に従う電力供給・需要制御システムの構成を示す模式図である。図1を参照して、本システムは、電力システムを構成する、発電所、変電所/配電所、蓄電器、需要などを含む。コントローラ100は、これらの要素の各々における状態値を取得し、後述するような制御ロジックを実行することで、各要素に対する制御値を算出する。
【0026】
より具体的には、本システムは、コントローラ100と、フィールドコントローラ10,20,30とを含む。
【0027】
フィールドコントローラ10は、発電所に配置され、発電所における状態値(運転状態や発電電力など)を収集するとともに、コントローラ100からの制御指令に従って発電所を制御する。より具体的には、フィールドコントローラ10は、コントローラ100とネットワーク42を通じて通信を行なうためのネットワークI/F11と、状態値を取得するためのセンサ12と、各機器を実際に制御するためのアクチュエータ13とを含む。
【0028】
同様に、フィールドコントローラ20は、変電所/配電所に配置され、変電所/配電所における状態値(送出電力や伝送率など)を収集するとともに、コントローラ100からの制御指令に従って変電所/配電所を制御する。フィールドコントローラ20は、フィールドコントローラ10と同様に、ネットワークI/F21と、センサ22と、アクチュエータ23とを含む。
【0029】
さらに、フィールドコントローラ30は、工場や家庭などの需要家に配置され、当該需要家に設けられる蓄電器や負荷などの状態値を収集するとともに、コントローラ100からの制御指令に従って蓄電器を制御する。なお、需要家に太陽光発電設備などが設けられている場合には、これらの情報についても収集する。フィールドコントローラ30は、フィールドコントローラ10と同様に、ネットワークI/F31と、センサ32と、アクチュエータ33とを含む。
【0030】
<B.ハードウェア構成>
次に、本実施の形態に従うコントローラ100のハードウェア構成について、図2を参照して説明する。図2は、本実施の形態に係るコントローラ100のハードウェア構成を示すブロック図である。
【0031】
コントローラ100は、コンピュータ本体102と、表示装置としてのモニタ104と、入力装置としてのキーボード110およびマウス112とを有する。モニタ104、キーボード110、およびマウス112は、コンピュータ本体102とバス105を介して接続される。
【0032】
コンピュータ本体102は、フレキシブルディスク(Flexible Disk:以下「FD」とも称す。)ドライブ106と、光ディスクドライブ108と、CPU(Central Processing Unit)120と、メモリ122と、直接アクセスメモリ装置、たとえば、ハードディスク124と、通信インターフェイス128とを含む。これらの部品は、互いにバス105で接続されている。
【0033】
FDドライブ106は、FD116に情報を読み書きする。光ディスクドライブ108は、CD−ROM(Compact Disk Read-Only Memory)118などの光ディスク上の情報を読み込む。通信インターフェイス128は、外部とデータの授受を行なう。
【0034】
なお、CD−ROM118は、コンピュータ本体に対してインストールされるプログラムなどの情報を記録可能な媒体であれば、他の媒体、たとえば、DVD−ROM(Digital Versatile Disk)やメモリーカードなどでもよく、その場合は、コンピュータ本体102には、これらの媒体を読み取ることが可能なドライブ装置が設けられる。また、バス105には、カセット形式の磁気テープを着脱自在に装着してアクセスする磁気テープ装置が接続されていてもよい。
【0035】
メモリ122は、ROM(Read Only Memory)およびRAM(Random Access Memory)を含む。
【0036】
ハードディスク124は、後述する本実施の形態に従う電力需要/供給負荷の制御ロジックを実現するためのプログラムや各種設定値などを格納する。より具体的には、ハードディスク124は、目的関数生成モジュール131と、目的関数算出モジュール132と、変数更新モジュール133と、収束判断モジュール134と、パラメータファイル135とを含む。
【0037】
CPU120が目的関数生成モジュール131を実行することで、対象のネットワークにおけるリソースの配分を最適化するために用いる目的関数(を示すデータ)を生成するとともに、メモリ122などにその生成された目的関数を保持させる。なお、目的関数の詳細については後述する。
【0038】
CPU120が目的関数算出モジュール132を実行することで、保持されている目的関数に基づいてその値を算出する。なお、この目的関数の値の算出は、リソースを発生するノード(典型的には、発電所)で発生するリソース(電力)の大きさを示す変数と、ノード間の伝送率を示す変数とに基づいて実行される。
【0039】
CPU120が変数更新モジュール133を実行することで、目的関数の値の算出に用いられるパラメータを更新する。より具体的には、CPU120は、目的関数をリソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけリソースの大きさを示す変数を更新する。また、CPU120は、目的関数を伝送率を示す変数で偏微分して得られる微分値に応じた値だけ伝送率を示す変数を更新する。
【0040】
CPU120が収束モジュール判断134を実行することで、変数更新モジュール133の実行により更新されたパラメータの値に基づいて、目的関数の値の算出を繰返し実行させるとともに、当該目的関数の算出処理が収束したか否かを判断する。CPU120は、目的関数の算出処理が収束したときの、リソースの大きさおよび伝送率を出力する。
【0041】
パラメータファイル135は、対象とするネットワークのトポロジーやそれを構成する部材についての各種設定を保持する。
【0042】
演算処理装置として機能するCPU120は、メモリ122をワーキングメモリとして、上述した各プログラムに対応した処理を実行する。
【0043】
図2に示したコンピュータのハードウェア自体およびその動作原理は一般的なものである。したがって、本発明の機能を実現するに当り本質的な部分は、FD116、CD−ROM118、ハードディスク124などの記憶媒体に記憶されたソフトウェアである。
【0044】
<C.電力需要/供給負荷の制御ロジック>
(c1:既存の電力ネットワークの発展)
図3は、既存の電力ネットワークの発展例について模式的に示す図である。なお、図3については、合田 他、“マイクログリッド−分散電源と電力ネットワークの共生のために”、電気新聞ブックス−エネルギー新書、2004年の29頁の記述を参考とした。
【0045】
まず、図3を参照して、既存の電力ネットワークがマイクログリッド(Microgrid:以下「MG」とも称す。)と統合する構成例について説明する。
【0046】
図3(a)に示すように、既存の電力ネットワークでは、複数の発電所(発電プラントと発電機)が並列的に接続されるとともに、これらの複数の発電所が需要家(負荷)へ電力を供給する。この図3(a)に示す既存の電力ネットワークに複数のMGが結合された場合には、図3(b)に示すような構成となる。
【0047】
MGの各々は、典型的には、電力/熱供給設備(図3(b)には図示していない)、蓄電設備、電力ネットワーク、情報通信技術を利用した制御装置(図3(b)には図示していない)、および、複数の負荷といった要素を含む。MGが既存の電力ネットワーク(いわゆる、商用電力系統)と大きく異なる点としては、熱を利用する用途、および、蓄電設備が存在することである。
【0048】
そして、このようなMGが複数結合されることで、いわゆるスマートグリッド(Smart Grid)を構成する。
【0049】
(c2:マイクログリッド/スマートグリッドのモデル化)
次に、マイクログリッドおよびスマートグリッドにおける電力需要/供給負荷の制御を実現するために、各構成要素をモデル化する手法を以下に説明する。
【0050】
図4は、既存の電力システムにおける典型的なモデルを示す図である。図4に示す既存の電力システムにおいては、発電所(P)、変電所/配電所(T)、需要(Q)の3つの要素が階層的に結合される。以下では、これらの要素を「ノード」と称す。
【0051】
より具体的には、発電所ノードPiには、電力を送出するための電力伝送路wijが結合されており、同様に、変電所/配電所ノードBjには、電力を送出するための電力伝送路wjkが結合されている。
【0052】
これに対して、図3に示すマイクログリッドにおいては、1つの発電所ノードPiからの電力は、電力伝送路wijおよびwikなどを通じて、複数の蓄電器ノードBjおよび需要ノードQkへそれぞれ供給される。なお、図3には図示されていないが、各パワーネットワーク・ケーブルには、後述するミドルウェア層を介して必要な情報を取得するための機構が設けられている。
【0053】
(c3:既存の電力システムについてのモデル式)
再度図4を参照して、i番目の発電所ノードPiからの供給電力をPiとし、j番目の変電所/配電所ノードBjから送出される電力をBjとし、k番目の需要ノードQkへの供給電力をQkとし、i番目の発電所ノードからj番目の変電所/配電所ノードへの電力伝送効率をwijとし、j番目の変電所/配電所ノードからk番目の需要ノードへの電力伝送効率をwjkとすると、これらの物理量の間には、(1)式および(2)式が成り立つ。なお、以下の説明では、同一の符号「Pi」を「i番目の発電所ノード」を示す符号、および、「i番目の発電所ノードからの供給電力」を示す符号として共用する。その他についても同様である。
【0054】
【数1】
【0055】
さらに、電力システム全体の電力バランスを評価するための目的関数Rは、(3)式のように定義できる。
【0056】
【数2】
【0057】
上式において、λ,μ,ν,ξは、各制約関数のペナルティーの重みを規定する定数であり、いずれも一定値に設定される。
【0058】
(3)式の目的関数Rについて、より詳しく説明する。(3)式の右辺第1項のP0は、発電所ノードで電力を発生するために必要なコストを示す関数である。また、(3)式の右辺第2項のHp*は、各電力ノードでの電力が0にならないように制約をかける制約関数である。また、(3)式の右辺第3項のHv*は、各電力ノードの最小電力と最大電力とを規定するための制約関数である。(3)式の右辺第4項のHe*は、供給元である各電力ノードから供給される電力が供給先の電力(需要)の合計と等しくするための制約関数である。(3)式の右辺第4項のHs*は、電力の供給をする/しないを切り換えるスイッチに関する制約関数である。
【0059】
本実施の形態に従う制御ロジックにおいては、発電所ノードPiからの供給電力をPi、ノード間の伝送率を逐次更新して、目的関数Rの値が最小値となるパラメータを探索する。そして、この探索結果に基づいて、電力ネットワーク内での電力フローを制御、すなわち、電力の配分を制御する。目的関数Rの値を最小化する数学的な方法については後述するとして、先に目的関数Rに含まれる各制約関数について説明する。
【0060】
(イ)関数P0について
関数P0は、電力システムに含まれる発電プラントにおける燃料コストの総和として定義することができる。各発電プラントの燃料コストは、当該発電プラントからの供給電力Piを変数とする二次式として近似化できる。具体的には、定数ai,bi,ciを用いて、以下のように示すことができる。
【0061】
【数3】
【0062】
この関数P0は、燃料コストが低いほどその値が小さくなるように設定される。すなわち、関数P0は、リソースである電力の大きさに関して単調増加する関数であり、発電所ノードから供給されるリソース(電力)に必要なコストの値を出力する。
【0063】
(ロ)制約関数Hp*について
制約関数Hp*は、各電力ノードでの電力が0にならないように制約をかけるためのものであるから、対応する供給電力Piが大きいほどその値が小さくなるような関数が用いられる。図5は、本発明の実施の形態に従う制約関数Hp*の一例を示す図である。本実施の形態においては、図5に示すように、各電力ノードについては、供給電力Piを定数−αpのべき乗して得られる値が用いられ、制約関数Hp*としては、これらの各電力ノードについて得られた値の総和が採用される。
【0064】
すなわち、本実施の形態において用いられる制約関数Hp*は、以下のように示すことができる。
【0065】
【数4】
【0066】
この制約関数Hp*は、発電所ノードで発生する電力(リソース)の大きさがゼロに近付くほどより大きな値を出力する。
【0067】
(ハ)制約関数Hv*について
制約関数Hv*は、各電力ノードの最小電力と最大電力とを規定するための制約関数である。より具体的には、変電所/配電所ノードにおける供給能力と需要ノードにおける負荷の大きさとを考慮する必要がある。
【0068】
本実施の形態において用いられる制約関数Hv*は、以下のように示すことができる。
【0069】
【数5】
【0070】
ここで、制約関数Hv*は、制約関数HBと制約関数HQとを含む。制約関数Hv*としては、これらの各電力ノードについて得られた、制約関数HBおよび制約関数HQの値の総和が採用される。
【0071】
制約関数HBは、変電所/配電所ノードの電力Bjがその送出可能な制限値(最大許容電力Bjmaxおよび最小許容電力Bjmin)を満たすように制約するものである。また、制約関数HQは、需要ノードの需要Qkがその負荷の制限値(最大許容電力Qkmaxおよび需要電力Dk)を満たすように制約するものである。
【0072】
制約関数HBおよび制約関数HQは、いずれもその制限範囲の中心値に近いほどその値が小さくなるような井戸型の関数が用いられる。図6は、本発明の実施の形態に従う制約関数HBおよび制約関数HQの一例を示す図である。
【0073】
(ニ)制約関数He*について
制約関数He*は、供給元である各電力ノードから供給される供給電力Piが供給先の電力(需要)の合計と等しくするための制約関数である。
【0074】
本実施の形態において用いられる制約関数He*は、以下のように示すことができる。
【0075】
【数6】
【0076】
ここで、制約関数He*は、制約関数He(Wi)と制約関数HQ(Wj)とを含む。より具体的には、制約関数He(Wi)は、発電所ノードPiによって発生される供給電力Piのフロー全体が総電力により制限されるという条件を満たすために用いられるものである。また、制約関数HQ(Wi)は、変電所/配電所ノードBjによって送出される電力フローの全体が総電力により制限されるという条件を満たすために用いられるものである。
【0077】
制約関数He(Wi)および制約関数HQ(Wj)は、いずれもその制限範囲の中心値に近いほどその値が小さくなるような関数が用いられる。図7は、本発明の実施の形態に従う制約関数He(Wi)の一例を示す図である。
【0078】
なお、変数Wiおよび変数Wjについては、それぞれ、i番目の発電所ノードからj番目の変電所/配電所ノードへの電力伝送効率wij、および、j番目の変電所/配電所ノードからk番目の需要ノードへの電力伝送効率wjkを用いて、以下に示す関係が成立する。
【0079】
【数7】
【0080】
この制約関数He*は、発電所ノードから需要ノードへの電力(リソース)の経路における伝送率(電力伝送効率をwijおよびwjk)を変数として有する。また、制約関数He*は、発電所ノードで発生した電力(リソース)のうち需要ノードへ供給される電力の大きさと、需要ノードで消費される電力の大きさとの差が大きくなるほどより大きな値を出力する。
【0081】
(ホ)制約関数Hs*について
制約関数Hs*は、電力の供給をする/しないを切り換えるスイッチに関する制約関数である。具体的には、隣接するノード間での電力伝送効率(電力フローのノード間における係数×ノード間の伝送率)を考慮する。なお、電力フローにおいては、通常、ノード間の伝送率は「0」または「1」に近い値をとる。
【0082】
本実施の形態において用いられる制約関数Hs*は、以下のように示すことができる。
【0083】
【数8】
【0084】
但し、cijは、ノードiからノードjへの電力フローの係数を示し、xijは、ノードiからノードjへの伝送率を示す。
【0085】
この制約関数Hs*は、ノード間の伝送率が「0」または「1」に近いほどより小さな値を出力する。図8は、本発明の実施の形態に従う制約関数Hsの一例を示す図である。
【0086】
(c4:既存の電力システムについての制約関数の解法)
本実施の形態においては、上述の(3)式に示す目的関数Rの最小値を探索する方法として、i番目の発電所ノードからの供給電力Piについて微小変化分ΔPiずつ変化させるとともに、各時点におけるノード間の伝送率xij,xjkについても微小変化分ΔxijおよびΔxjkずつ変化させて順次計算を行なう。そして、最小値(収束値)を探索する。
【0087】
すなわち、目的関数Rを電力(リソース)の大きさを示す変数であるPiで偏微分して得られる微分値に応じた値だけPiを更新するとともに、目的関数Rを伝送率を示すxijおよびxjkでそれぞれ偏微分して得られる微分値に応じた値だけ伝送率xijおよびxjkを更新する。そして、更新後のパラメータに基づいて、目的関数Rの値の算出を繰返す。そして、目的関数Rの算出処理が収束したときの、供給電力Piおよび変数xijおよびxjkが出力される。
【0088】
なお、目的関数Rの値が新たに算出される前に、電力(リソース)の大きさを示す変数であるPi、ならびに、伝送率を示すxijおよびxjkのいずれをも更新する処理形態(以下「同期的更新法」とも称す。)を採用することもできる。あるいは、これらのうちいずれか一方のみを更新する処理形態(以下「非同期的更新法」とも称す。)を採用することもできる。
【0089】
まず、i番目の発電所ノードからの供給電力Piの微小変化分ΔPiについては、以下に示す(4)式に従って算出することができる。
【0090】
【数9】
【0091】
ここで、周期的な発散を回避するために、定数ηpは、以下に示すように、RをPiについてテーラー展開して得られた式についての1次近似を用いてスケーリングされる。
【0092】
【数10】
【0093】
なお、定数ηpは、元のRの値を(1−ηp)倍に低減させる低減率として定義される。これは、1次近似した場合の目的関数Rの次ステップにおける値に等しい。したがって、定数ηpは、以下に示す(5)式のように表すことができる。
【0094】
【数11】
【0095】
そして、供給電力Piは、Pi(t+1)=Pi(t)+ΔPi(t)に従って順次更新される。なお、変数tは、後述する目的関数Rの収束計算における計算回数(ステップ)を示す。
【0096】
上述と同様にして、ノードBjとノードQkとの間のノード間の伝送率xjkについては、以下に示す(6)式のように表すことができる。
【0097】
【数12】
【0098】
上述の(5)式と同様に、周期的な発散を回避するために、定数ηは、以下に示す(7)式に示すように、Rについての1次近似を用いてスケーリングされる。
【0099】
【数13】
【0100】
次に、ノードPiとノードBjとの間の伝送率の変化分Δxijについては、以下に示す(8)式のように表すことができる。
【0101】
【数14】
【0102】
さらに、上述の(7)式と同様に、周期的な発散を回避するために、定数ηは、以下に示す(9)式に従ってスケーリングされる。
【0103】
【数15】
【0104】
(c5:既存の電力システムについての制御手順)
図3(a)に示すような既存の電力システムについての制御手順としては、発電所ノードからの供給電力Pi,伝送率xij,伝送率xjkを同期させて更新しつつ計算を繰返すことで、上述の(3)式に示す目的関数Rが最小値となるそれぞれの値を逐次決定する。
【0105】
図9を用いてこの具体的な処理手順について説明する。図9は、この発明の実施の形態に従う既存の電力システムについての制御手順を示すフローチャートである。
【0106】
図9を参照して、まず、CPU120は、伝送率xijおよびxjkのそれぞれの初期値をランダムに決定する(ステップS100)。
【0107】
CPU120は、電力の順伝搬の期間中、上述の(3)式を用いて、目的関数Rの値を算出する(ステップS102)。そして、CPU120は、上述の(6)式を用いて、伝送率xjkについての微小変化分Δxjkを算出する(ステップS104)。また、CPU120は、上述の(8)式を用いて、伝送率xijについての微小変化分Δxijを算出する(ステップS106)。その後、CPU120は、以下の式に従って、伝送率xijおよびxjkを更新する(ステップS108)。
【0108】
xjk(t+1)=xjk(t)+Δxjk
xij(t+1)=xij(t)+Δxij
また、CPU120は、上述の(4)式を用いて、発電所ノードからの供給電力Piについて微小変化分ΔPiを算出する(ステップS110)。その後、CPU120は、以下の式に従って、発電所ノードからの供給電力Piを更新する(ステップS112)。
【0109】
Pi(t+1)=Pi(t)+ΔPi
さらに、CPU120は、目的関数Rについての計算が収束しているか否かを判断する(ステップS114)。より具体的には、発電所ノードからの供給電力Piについて微小変化分ΔPi,伝送率xjkについての微小変化分Δxjk,伝送率xijについての微小変化分Δxijのいずれもが安定している、すなわち、変化量が所定のしきい値以下である場合には、収束していると判断される。そうでなければ、収束していないと判断される。
【0110】
すなわち、CPU120は、算出される目的関数Rの値が最小値を実質的に維持する状態になった場合に、目的関数Rの算出処理が収束したと判断する。
【0111】
目的関数Rについての計算が収束していない場合(ステップS114においてNOの場合)には、ステップS102以下の処理が繰返される。一方、目的関数Rについての計算が収束している場合(ステップS114においてYESの場合)には、算出された、発電所ノードからの供給電力Pi,伝送率xij,伝送率jkとなるように制御指令を出力する(ステップS116)。すなわち、電力ネットワークにおける電力フローが制御される。そして、処理は終了する。
【0112】
なお、図9のフローチャートに示される処理手順は、所定周期あるいは何らかのイベント発生毎に実行される。
【0113】
(c6:マイクログリッドについてのモデル式)
上述したモデル式およびその解法については、上述したようなマイクログリッドにも拡張することができる。
【0114】
図10は、マイクログリッドの一例について模式的に示す図である。本実施の形態においては、図10に示すマイクログリッドに適用する場合を例として、モデル式の導出および各種のシミュレーションの実行結果などを提示するが、本実施の形態は、一般性を失わない限りにおいて、各種のマイクログリッドに適用することができる。
【0115】
図10に示すように、発電所ノードP1を中心として、放射状に複数の蓄電器(バッテリ)ノードおよび需要ノードが電力ネットワーク・ケーブルを介して結合されているとする。特に、図10に示すマイクログリッドにおいては、蓄電器ノード間での電力の遣り取りについても考慮する。これは、需要に対処するためにある蓄電器から電力が供給されているような状況下において、当該電力供給中の蓄電器に蓄えられている電力が枯渇しそうになった場合に、他の蓄電器から電力を融通するといった使用形態が想定されるからである。あるいは、蓄電器が蓄えることのできる電力量については制限があるので、ある蓄電器がそれ以上電力を蓄えることができない状況になった場合に、他の蓄電器に電力を蓄えてもらうような使用形態も想定される。
【0116】
i番目の発電所ノードからの供給電力をPiとし、j番目の蓄電器ノードに供給される電力をBjとし、j’番目の蓄電器ノードからj番目の蓄電器ノードに送出される電力をBj’とし、k番目の需要ノードへの供給電力をQkとすると、各ノード間の電力伝送効率wを用いると、これらの物理量の間には、上述の(1)式および(2)式を拡張して、(10)式〜(12)式が成り立つ。
【0117】
【数16】
【0118】
さらに、電力システム全体の電力バランスを評価するための目的関数Rは、(13)式のように定義できる。
【0119】
【数17】
【0120】
上式において、λ,μ,ν,ξは、いずれも定数である。
(13)式の目的関数Rを構成するそれぞれの関数(関数P0,制約関数Hp*,制約関数Hv*,制約関数He*,制約関数Hs*)が有する意味は、上述したものと同様である。すなわち、関数P0は、発電所ノードで電力を発生するために必要なコストを示すものであり、制約関数Hp*は、各電力ノードでの電力が0にならないように制約をかけるもの数であり、制約関数Hv*は、各電力ノードの最小電力と最大電力とを規定するものであり、制約関数He*は、供給元である各電力ノードから供給される電力が供給先の需要(負荷)の合計と等しくするためのものであり、制約関数Hs*は、電力の供給をする/しないを切り換えるスイッチに関するものである。
【0121】
図10に示すマイクログリッドでは、関数P0,制約関数Hp*,制約関数Hv*,制約関数He*,制約関数Hs*を以下に示すように定義することができる。なお、図10に示すマイクログリッドでは、図4に示す既存の電力ネットワークに比較して、より多くのノードが存在するため、既存の電力ネットワークのモデル化において用いられる制約関数に比較して、より多くの変数を含む関数となっている。
【0122】
【数18】
【0123】
このうち、制約関数He*については、電力(リソース)を中継する変電所/配電所ノード、または、電力(リソース)を蓄える蓄電器(バッテリ)ノードが考慮されたものとなっている。すなわち、制約関数He*は、発電所ノードPiから需要ノードQkへ供給されるリソースの大きさに関する関数と、発電所ノードPiから蓄電器ノードBjへ供給されるリソースの大きさに関する関数と、蓄電器ノードBjから需要ノードQkへ供給されるリソースの大きさに関する関数とを含む。
【0124】
(c7:マイクログリッドについての制約関数の解法)
上述の(13)式に示すマイクログリッドについての目的関数Rの最小値を探索する方法としては、(1)複数の変数を同期的に順次更新する方法(同期的更新法)と、(2)複数の変数を異なるタイミングで更新する方法(非同期的更新法)とを採用することができる。
【0125】
(1)の方法については、上述の既存の電力システムについての目的関数R((3)式)の最小値を探索する方法と同様に、発電所ノードからの供給電力Piについて微小変化分ΔPi、および、各ノードにおける伝送率xjk,xik,xij,xj’j,xj’k,xijの各々についての微小変化分Δxjk,Δxik,Δxij,Δxj’j,Δxj’k,Δxijを同一ステップ内において一斉に更新していく。そして、最小値(収束値)を探索する。
【0126】
一方、(2)の方法については、各ステップにおいて、上述のようなパラメータのうち一部のみを更新する。
【0127】
以下、微小変換分の数学的な算出方法について説明する。
まず、発電所ノードからの供給電力Piについて微小変化分ΔPiについては、以下に示す(14)式に従って算出することができる。
【0128】
【数19】
【0129】
次に、各ノードにおける微小変化分Δxjk,Δxik,Δxij,Δxj’j,Δxj’k,Δxijについては、以下に示す(15)〜(20)式のように表すことができる。
【0130】
【数20】
【0131】
なお、周期的な発散を回避するために、上述の(5)式および(7)式と同様にして、定数ηを導入し、発電所ノードからの供給電力Piについて微小変化分ΔPi、および、各ノードにおける微小変化分Δxをスケーリングすることが好ましい。
【0132】
(c8:マイクログリッドについての制御手順)
図10に示すようなマイクログリッドについて、図11を参照して説明する。図11は、この発明の実施の形態に従う既存のマイクログリッドについての制御手順を示すフローチャートである。
【0133】
図10を参照して、まず、CPU120は、対象のマイクログリッドにおいて何らかのイベントが発生しているか否かを判断する(ステップS200)。このイベントとは、対象のマイクログリッドにおける各種パラメータを制約する事象を意味する。何らかのイベントが発生している場合(ステップS200においてYESの場合)には、CPU120は、対象のパラメータ(供給電力Piおよび伝送率xjk,xik,xij,xj’j,xj’k,xijのいずれか)をイベントに応じた値に設定する(ステップS202)。そして、処理はステップS204へ進む。
【0134】
これに対して、何らのイベントも発生していない場合(ステップS200においてNOの場合)には、ステップS202の処理はスキップされる。
【0135】
ステップS204において、CPU120は、伝送率xjk,xik,xij,xj’j,xj’k,xij(ステップS202において所定値に設定されているものを除く)のそれぞれの初期値をランダムに決定する(ステップS204)。
【0136】
CPU120は、電力の順伝搬の期間中、上述の(13)式を用いて、目的関数Rの値を算出する(ステップS208)。そして、CPU120は、上述の(15)〜(20)式を用いて、伝送率についての微小変化分Δxjk,Δxik,Δxij,Δxj’j,Δxj’k,Δxij(ステップS202において所定値に設定されているものを除く)を算出する(ステップS210)。その後、CPU120は、以下の式に従って、伝送率xjk,xik,xij,xj’j,xj’k,xij(ステップS202において所定値に設定されているものを除く)を更新する(ステップS210)。
【0137】
xjk(t+1)=xjk(t)+Δxjk
xik(t+1)=xik(t)+Δxik
xij(t+1)=xij(t)+Δxij
xj’j(t+1)=xj’j(t)+Δxj’j
xj’k(t+1)=xj’k(t)+Δxj’k
xij(t+1)=xij(t)+Δxij
また、CPU120は、上述の(14)式を用いて、供給電力Piについて微小変化分ΔPiを算出する(ステップS212)。その後、CPU120は、以下の式に従って、供給電力Piを更新する(ステップS214)。
【0138】
Pi(t+1)=Pi(t)+ΔPi
さらに、CPU120は、目的関数Rについての計算が収束しているか否かを判断する(ステップS216)。より具体的には、供給電力Piについて微小変化分ΔPi、および、伝送率についての微小変化分Δxjk,Δxik,Δxij,Δxj’j,Δxj’k,Δxijのいずれもが安定している、すなわち、変化量が所定のしきい値以下である場合には、収束していると判断される。そうでなければ、収束していないと判断される。
【0139】
目的関数Rについての計算が収束していない場合(ステップS216においてNOの場合)には、ステップS204以下の処理が繰返される。一方、目的関数Rについての計算が収束している場合(ステップS216においてYESの場合)には、算出された、供給電力Piおよび伝送率jk,xik,xij,xj’j,xj’k,xijとなるように制御指令を出力する(ステップS218)。すなわち、電力ネットワークにおける電力フローが制御される。
【0140】
なお、図11のフローチャートに示される処理手順は、所定周期あるいは何らかのイベント発生毎に実行される。
【0141】
<D.シミュレーション結果>
以下、上述したような目的関数を用いたシミュレーションを行なった結果を示す。
【0142】
(d1.既存の電力ネットワーク)
シミュレーションの条件としては、各制約関数(ペナルティー)の重みを規定する定数λ,μ,ν,ξは、いずれも「1」とした。また、燃料コストを定義する関数の定数ai,bi,ciについても、目的関数を簡素化する観点から、いずれも「1」とした。
【0143】
変電所/配電所ノードまたは蓄電器ノードの電力Bj、および、需要ノードの需要Qkについては、いずれも規格化(0≦Bj≦1,0≦Qk≦1)した値を用いた。その上で、最小許容電力Bjmin=「0.2」、および、最大許容電力Bjmax=「0.8」とした。また、需要電力Dk=「0.2」、および、最大許容電力Qkmax=「0.8」とした。
【0144】
その他のパラメータとしては、制約関数Hp*を定義する定数αp=「0.5」とし、制約関数Hv*(制約関数HBおよび制約関数HQ)を定義する定数αB=αQ=「4.0」とし、制約関数He*を定義する定数βe=「0.05」、および、定数γe=「0.5」とした。
【0145】
さらに、周期的な発散を回避するための1次近似に用いられる定数η0=「0.01」とし、ノード間の電力フローの係数cij,cjk,cik,cj’j,cj’k,cij’=「1.0」とした。
【0146】
既存の電力ネットワークについてのシミュレーション対象として、2つの発電所ノード、3つの変電所/配電所ノード、および5つの需要ノードが存在する構成とした。発電所ノードからの供給電力Pi、発電所ノードと変電所/配電所ノードとの間の電力伝送効率wij、および変電所/配電所ノードと需要ノードとの間の電力伝送効率wjkに関して同期的に変化させて、目的関数Rの値の変化を観測した。
【0147】
図12は、既存の電力ネットワークについてのシミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。図13は、既存の電力ネットワークについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図14は、既存の電力ネットワークについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0148】
図12に示すように、発電所ノードからの供給電力Piがシミュレーション開始後100ステップ(収束計算回数:100)で急激に増加して、「1.2」まで到達していることがわかる。また、図13に示すように、発電所ノードと変電所/配電所ノードとの間の電力伝送効率wij、および、変電所/配電所ノードと需要ノードとの間の電力伝送効率wjkについても、シミュレーション開始後100ステップ(収束計算回数:100)で安定値に収束していることがわかる。
【0149】
その結果、図14に示すように、目的関数Rの値についても単調に減少し、シミュレーション開始後100ステップ(収束計算回数:100)で「15」程度の安定点に到達していることがわかる。
【0150】
図12〜図14に示すシミュレーション結果から、本実施の形態に従う目的関数を用いることで、短時間で、既存の電力システムにおける適切な解を決定することができるといえる。
【0151】
(d2.マイクログリッド)
シミュレーションの条件としては、上述の既存の電力ネットワークについてのシミュレーションと同様の条件を採用した。
【0152】
マイクログリッドについてのシミュレーション対象として、図10に示すような、1つの発電所ノード(供給電力Pi)、4つの蓄電器ノード(電力Bj)、および3つの需要ノード(需要Qk)が存在する構成とした。発電所ノードからの供給電力Pi、発電所ノードPiと蓄電器ノードBjとの間の電力伝送効率wij、および蓄電器ノードBjと需要ノードQkとの間の電力伝送効率wjk、発電所ノードPiと需要ノードQkとの間の電力伝送効率wikに関して同期的に変化させて、目的関数Rの値の変化を観測した。
【0153】
図15は、マイクログリッドについてのシミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。図16は、マイクログリッドについてのシミュレーションによって観測された需要ノードQkの時間変化を示すグラフである。図17は、マイクログリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図18は、マイクログリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0154】
図15に示すように、発電所ノードからの供給電力Piが1800ステップ(収束計算回数:1800)で急激に増加して、「2.2」まで到達していることがわかる。また、図16に示すように、需要ノードにおける需要Qkの値が単調に増加して、「0.35」まで到達していることがわかる。
【0155】
図17に示すように、1%のノイズや10%の初期値が加算された場合であっても、電力ノード間におけるすべての電力伝送効率wij,wjk,wikは、いずれも0.1〜0.2の範囲内の安定値に収束していることがわかる。図18に示すように、目的関数Rの値についてもなめらかに減少して、「25」程度の安定点に到達していることがわかる。
【0156】
図15〜図18に示すシミュレーション結果から、本実施の形態に従う目的関数を用いることで、短時間で、かつ、初期値の設定に関係なく安定して、マイクログリッドにおける適切な解を決定することができるといえる。
【0157】
(d3.マイクログリッド(事故発生時))
次に、上述のマイクログリッドについてのシミュレーションにおいて、事故が発生した場合の時間変化を観察した。より具体的には、2500ステップにおいて、発電所ノードPiと需要ノードQkとの間を遮断(電力伝送効率wik=0(open))した。
【0158】
図19は、マイクログリッドについての事故シミュレーションによって観測された需要ノードQkの時間変化を示すグラフである。図20は、マイクログリッドについての事故シミュレーションによって観測された発電所ノードからの供給電力Piの時間変化を示すグラフである。図21は、マイクログリッドについての事故シミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図22は、マイクログリッドについての事故シミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0159】
図19に示すように、発電所ノードからの電力が需要ノードには直接的に供給されなくなるので、需要Qkは、事故の発生した2500ステップにおいて、瞬間的に減少している。これに対して、発電所ノードからの供給電力Piは、わずかに変動するのみである。これは、他の需要ノードや蓄電器ノードへバイパス経路を通してその発生する電力を供給し続けるからである。
【0160】
「0」に設定される電力伝送路wikを除いて、他の電力伝送路wij,wjk,wij’wj’kといった迂回伝送路によって電力供給が回復する。図21には、発電所ノードPiと需要ノードQkとの間の電力伝送効率がバイパス経路を通して時間とともに回復する状態が示されている。すなわち、電力伝送効率wikは、2500ステップで「0」に減少した後でも、3600ステップの時点あたりで、他の迂回伝送路の電力伝送効率wij,wjkが正の値まで上昇することにより電力供給を回復していることがわかる。
【0161】
一方、図22に示すように、このような事故が発生した場合であっても、目的関数Rの値は若干の増加をするもののほとんど変動をしていないことがわかる。
【0162】
(d4.スマートグリッド)
次に、既存の電力ネットワークに統合されたスマートグリッドについてシミュレーションを行なった結果を示す。
【0163】
図23は、既存の電力ネットワークに複数のマイクログリッドが統合された構成例について模式的に示す図である。すなわち、図23に示す構成例は、発電所ノードを頂点として、第1階層(layer#1)に位置する2つの変電所ノードと、第3階層(layer#3)に位置する3つの変電所ノードとを含むパワーネットワークを含む。このパワーネットワークが既存の電力システムに相当する。この既存の電力システムに、3つのマイクログリッド(マイクログリッド#1,#2,#3)が結合されている。なお、図23においては、説明の便宜上、各ノードに番号を付している。
【0164】
図23に示す構成においても、電力伝送路wと電力供給・需要制御システムを実現するための通信ネットワーク(コンピュータ・ネットワーク)は、ミドルウェア層(詳細については後述する)を通じて一体化されている。
【0165】
シミュレーションの条件としては、ペナルティーの重みを規定する定数λ,μ,νは、いずれも「1.4」とし、定数ξは「1」とした。また、燃料コストを定義する関数の定数ai,bi,ciについても、目的関数を簡素化する観点から、いずれも「1」とした。
【0166】
変電所/配電所ノードまたは蓄電器ノードの電力Bj、および、需要ノードの需要Qkについては、いずれも規格化(0≦Bj≦1,0≦Qk≦1)した値を用いた。その上で、最小許容電力Bjmin=「0.2」、および、最大許容電力Bjmax=「0.8」とした。また、需要電力Dk=「0.2」、および、最大許容電力Qkmax=「0.8」とした。
【0167】
その他のパラメータとしては、制約関数Hp*を定義する定数αp=「0.22」とし、制約関数Hv*(制約関数HBおよび制約関数HQ)を定義する定数αB=αQ=「4.0」とし、制約関数He*を定義する定数βe=「0.05」、および、定数γe=「0.5」とし、制約関数Hs*を定義する定数βs=「0.15」とした。
【0168】
さらに、周期的な発散を回避するための1次近似に用いられる定数η0=「0.01」とした。
【0169】
上述のシミュレーションと同様に、発電所ノード(ノード1)からの供給電力Pi、および、ノード間における電力伝送効率wを同期的に変化させて、目的関数Rの値の変化を観測した。さらに、上述のシミュレーションと同様に事故が発生した場合の挙動についても観測した。具体的には、シミュレーション開始後250ステップにおいて、配電所ノードP’iと蓄電器ノードBjとの間を遮断(電力伝送効率wij=0(open))した。
【0170】
同期的更新法により、パラメータを同期的に更新した場合のシミュレーション結果を図24〜図27に示す。
【0171】
図24は、スマートグリッドについてのシミュレーションによって観測された発電所ノード(ノード1)からの供給電力Piの時間変化を示すグラフである。図25は、スマートグリッドについてのシミュレーションによって観測された蓄電器(ノード17)へ供給される電力Bjの時間変化を示すグラフである。図26は、スマートグリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図27は、スマートグリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0172】
図24に示すように、発電所ノードからの供給電力Piは単調に増加して、シミュレーション開始後120ステップ(収束計算回数:120)で「2.2」の安定値まで到達していることがわかる。また、図25に示すように、蓄電器(たとえば、ノード17)へ供給される電力Bjは、電力Bjの最小値(すなわち、最小許容電力Bjmin)を満たすように徐々に増加していることがわかる。
【0173】
さらに、図26に示すように、電力ノード間におけるすべての電力伝送効率wij,wjk,wikは、いずれも0.0〜0.25の範囲内の安定値に収束していることがわかる。図27に示すように、目的関数Rの値についてもなめらかに減少して、「150」程度の安定点に到達していることがわかる。
【0174】
次に、上述のマイクログリッドについてのシミュレーションにおいて、250ステップの時点で事故が発生した場合を仮定する。すなわち、250ステップにおいて、配電所ノードP’iと蓄電器ノードBjとの間を遮断(電力伝送効率wij=0(open))した。
【0175】
図26に示すように、配電所ノードP’i(ノード8)からの電力が蓄電器ノードBj(ノード17)には直接的に供給されなくなるので、図25に示すように蓄電器ノードBjでの電力は、事故の発生した250ステップにおいて、瞬間的に減少している。これに対して、発電所ノードからの供給電力Piは、わずかに変動するのみである。
【0176】
「0」に設定される電力伝送路wikを除いて、迂回伝送路によって電力供給が回復する。図26には、配電所ノードP’iと蓄電器ノードBjとの間の電力伝送効率wijが時間とともに回復する状態が示されている。すなわち、電力伝送効率wijは、250ステップで一旦「0」に減少した後に、迂回伝送路を経由する電力伝送効率は上昇している。すなわち、電力供給が迂回伝送路経由で回復していることがわかる。
【0177】
一方、図27に示すように、このような事故が発生した場合であっても、目的関数Rの値はほとんど変動をしていないことがわかる。このシミュレーションによって、マイクログリッドのロバスト性(頑健性)が示される。
【0178】
次に、上述と同様の条件で、制御変数を任意のタイミングで更新する非同期的更新法を用いたシミュレーション結果を図28〜図31に示す。
【0179】
図28は、スマートグリッドについてのシミュレーションによって観測された発電所ノード(ノード1)からの供給電力Piの時間変化を示すグラフである。図29は、スマートグリッドについてのシミュレーションによって観測された蓄電器(ノード17)へ供給される電力Bjの時間変化を示すグラフである。図30は、スマートグリッドについてのシミュレーションによって観測された電力伝送効率wijの時間変化を示すグラフである。図31は、スマートグリッドについてのシミュレーションによって観測された目的関数Rの時間変化を示すグラフである。
【0180】
図28〜図31についても、上述の図24〜図27にそれぞれ示すシミュレーション結果と同様の結果となっている。
【0181】
<E.その他の考慮事項>
(e1.需要の時間的変動)
上述の実施の形態においては、いくつかの制約条件下でモデル化したものであるが、一般的には、目的関数Rは、時間的に変化する非線形の関数となる。たとえば、需要電力Dkは、時間とともに常に変化する。たとえば、日中には需要電力Dkが増大し、夜間には減少するといったパターンを有する。
【0182】
このような条件下においては、たとえば、時間的に変動する需要電力Dk(t)として、以下のような関数を採用することができる。
【0183】
【数21】
【0184】
ここで、akは振幅を示し、θkはk番目の需要ノードの位相を示し、bkはオフセットである、最大許容電力Qkmaxに対して20%程度の余裕を持たせているため、ε=0.8としている。
【0185】
需要電力Dk(t)が時間的に変動すると、上述の目的関数Rを最小化する収束計算が再度実行され、目的関数Rの値が最小化するように、電力フローの状態も変化する。
【0186】
本実施の形態に従う電力供給・需要制御システムにおいては、発電所ノードからの供給電力Pi、および、伝送率xij,xjk,xikを適宜更新することで、このような電力需給状態の変動に対応する。
【0187】
なお、時間的に変動する需要電力Dk(t)としては、上述のような固定された関数ではなく、後述するように、学習制御によって各需要ノードにおける変動モデルを推定し、この推定された変動モデルを用いて制御を行なってもよい。
【0188】
(e2.再生可能エネルギー源の存在)
再度図10を参照して、蓄電器ノードBjが発電所ノードPiの側に所属し、蓄電器ノードBj’が需要ノードQkの側に所属する場合において、蓄電器ノードBjが充電されるときには、電力伝送効率wj’jは、蓄電器ノードBj’から蓄電器ノードBjへの電力供給経路に相当する。この状況は、需要家Qkが蓄電器Bj’から蓄電器Bjを通して、電力供給側Piに売電する場合に対応する。
【0189】
ここで、蓄電器ノードまたは需要ノードに、他の蓄電器ノードまたは発電所ノードからの電力を受け入れる十分な能力が存在しない場合には、蓄電器ノードの最大許容電力Bjmaxは、以下のような関数を採用することにより、その最大蓄電能力を増大することができる。
【0190】
【数22】
【0191】
すなわち、目的関数Rの収束計算時には、以下のような数式に従って、最大許容電力Bjmaxを順次更新する。
【0192】
Bjmax(t+1)=Bjmax(t)+ΔBjmax
同様に、需要ノードの最大許容電力Qkmaxは、以下のような関数を採用することにより、その最大許容電力を増大することができる。
【0193】
【数23】
【0194】
すなわち、目的関数Rの収束計算時には、以下のような数式に従って、最大許容電力Qkmaxを順次更新する。
【0195】
Qkmax(t+1)=Qkmax(t)+ΔQkmax
上述のような関数を採用することで、スマートグリッドの構成として、太陽光発電、風力発電、バイオマス発電といった再生可能な自然エネルギー源が含まれていた場合であっても、適切な電力供給・需要制御が可能となる。
【0196】
(e3.スマートグリッドのトポロジー変化)
特にスマートグリッドにおいては、容易に、小規模な電力源(発電所)が追加されたり、蓄電器(バッテリ)が追加されたりする。あるいは、何らかの事故や補修などによって、電力供給経路(電力ネットワーク・ケーブル)が遮断されることもある。
【0197】
このような場合、スマートグリッドの全体としてみれば、トポロジーが変化することになる。このような場合であっても、本実施の形態に従う電力供給・需要制御システムにおいては、目的関数Rに含まれる伝送率xijおよびxjkのうち、対応するものの値を、遮断状態を示す「0(open)」、または、導通状態を示す「1(close)」のいずれかに固定することで、このようなトポロジー変化についても容易に対処することができる。
【0198】
<F.学習による負荷変動予想>
上述のような電力供給・需要制御は、図1に示すフィールドコントローラなどからなる物理層、および図2に示すコントローラ100などからなる制御プレーン(Control Plane)などの階層構造によって実現される。
【0199】
このような階層構造に対して、需要の将来的な変動を予測するための予測学習層を追加することもできる。
【0200】
(f1.アーキテクチャ)
図32は、本実施の形態に従う需要予測をするためのサービス層を統合したネットワーク・アーキテクチャの例を模式的に示す図である。
【0201】
図32に示すネットワーク・アーキテクチャは、現実のスマートグリッドを監視制御するためのスマートグリッド層(Smart Grid Layer)がある。このスマートグリッド層は、本ネットワーク・アーキテクチャの最下層に位置する物理層である。
【0202】
一方、本ネットワーク・アーキテクチャの最上層には、需要の将来的な変動を予測するための予測学習層が位置している。この予測学習層は、ネットワーク階層でいうところの、アプリケーション層またはサービス層に対応する。
【0203】
さらに、スマートグリッド層と予測学習層との間には、両者を統合するためのミドルウェア層(Middle Ware Layer)が位置する。ミドルウェア層は、厳密には、擬似レイヤーとして実装され、予測学習層により予測された需要の将来的な変動の学習値(関数)に基づいて、スマートグリッド層における電力フローを制御する。すなわち、上述した、目的関数Rが最小値をとるように、収束演算などを行なう。
【0204】
なお、ミドルウェア層は、スマートグリッド層の需要ノードまたは蓄電器ノードにおいて、電力需要に対する要求が満たされない場合などには、制御誤差信号を予測学習層にフィードバックすることで、予測精度を高めることができる。また、ミドルウェア層は、スマートグリッド層に何らかの新たなノードが追加された場合には、その追加された内容を予測学習層に通知する。予測学習層は、仮想ネットワークのトポロジーを変更することで、このスマートグリッド層でのノード構成の変更に対処する。
【0205】
なお、図32に示す例は、既存のネットワーク・アーキテクチャに実装する例を示すが、現在研究開発が行なわれており、4〜5年後に実用化が見込まれている新世代ネットワークに実装する場合は、図33に示すようなアーキテクチャを採用することができる。
【0206】
図33は、本実施の形態に従うシステムを新世代ネットワークに実装した場合のネットワーク・アーキテクチャの例を模式的に示す図である。図33を参照して、予測学習層は、新世代ネットワーク・アーキテクチャの再上位に位置するサービス層の中に実装される。
【0207】
なお、新世代ネットワーク・アーキテクチャでは、現実にパケットが遣り取りされる物理層(Substrate Layer)の上位に仮想ネットワーク層(Virtualization Layer)が配置され、同一の物理的主体に対して多数のノードを仮想的に設けることができる。
【0208】
(f2.予測学習層のネットワーク構成)
図34は、本実施の形態に従う予測学習層を実現するためのネットワーク構成を模式的に示す図である。
【0209】
図34に示すネットワークは、複数の仮想ノードを含んで構成される。このネットワーク中の各仮想ノードは、計算および学習に関する処理、および、アルゴリズム構築に関する処理を実行する。この計算および学習に関する処理としては、エージェント生成、データ転送、定数値補正などの処理が含まれる。また、アルゴリズム構築に関する処理としては、ノードおよびエッジの生成/削除といったトポロジー変更に関する処理を含む。
【0210】
また、このネットワークは、仮想ノードに加えて、ユーザノードを含む。このユーザノードは、現実のユーザデータ(スマートグリッドにおいては電力フローに関する各種検出値)を収集し、あるいは、予測学習処理のフロントエンドとして入力データ/教師データの処理/管理を行なう。
【0211】
このようなネットワークおよびそれに含まれる仮想ノードを用いた予想学習処理を実現するための基本的な思想は、本願出願人らが先に出願した特願2008−274282号の明細書に詳述に記載されているのでそちらを参照されたい。
【0212】
この特願2008−274282号に開示されている「アルゴリズム可変ネットワーク(Algorism Transitive Network:ATN)」を用いて、本実施の形態に従う予測学習処理を実現する。すなわち、図34に示すようなネットワークを物理的または仮想的に構築するとともに、予測学習層(図33)は、ユーザノードから入力された情報を教師としてアルゴリズム学習を行ない、需要の時間的変動に関する内部モデルを構築する。
【0213】
(f3.アルゴリズム学習)
図35は、本実施の形態に従うアルゴリズム学習における動作を模式的に示す図である。本実施の形態においては、図32に示すように、スマートグリッド層(電力ネットワーク)と予測学習層とが統合された状態において、ユーザノードから対象となる需要家(負荷サイト)からの情報を入力/教師データとして与える。すると、生成されたエージェントに従って、ネットワークの仮想ノード間をパケットが順次伝播(順伝播および逆伝播)することで学習が行なわれる。充分な時間の経過後には、内部モデル(アルゴリズム)が得られる。この内部モデルは、学習の結果得られた需要の特性を示す関数に相当する。
【0214】
なお、図35に示すようなアルゴリズム学習については、需要家の別にそれぞれ独立に設けることが好ましい。
【0215】
このような内部モデル(アルゴリズム)が一旦構築されると、この情報に基づいて、上述した目的関数Rを用いた電力供給・需要制御が実行される。すなわち、各需要の時間的変化を示す関数を目的関数Rに含めた上で、目的関数Rの値が最小化するように、順次制御を実行する。
【0216】
なお、ユーザノードから入力する教師データとしては、現実の需要の大きさ(の時間変化)に加えて、需要の大きさに影響を与えるような、すなわち、需要と相関関係の高いデータを入力することが好ましい。このような需要と相関関係の高いデータとしては、以下のようなものから任意に選択することができる。
【0217】
・地理情報(緯度、経度、高度)
・時刻情報(年、月、日、時、分、秒)
・気温(最高気温、最低気温、平均気温)、日照時間、気圧、湿度
・降水量、氷、霜、霧、雪の量
・風向、風速
・気象衛星からの衛星画像データ
・天気図、天気予報、週間天気予報、季節情報、台風情報など
・過去の気象データ
・地球環境データバンク情報(地球温暖化データ、温室効果ガスの状況、エルニーニョ現象の発生有無、ラニーリャ現象の発生有無、ヒートアイランド情報、黄砂情報、紫外線観測データ、オゾン層の状況など)
・太陽黒点情報、火山噴火予報・警報など
・海洋データ(海水温、海洋の温室効果ガスなど)
内部モデル(アルゴリズム)は、これらの教師データとして入力された情報と高い相関を有する関数として生成される。
【0218】
なお、上述の例では、需要の時間的変動を予測学習する場合について例示したが、サービスノード(主として、電力供給ノード)からの供給量の時間的変動を予測学習することもできる。たとえば、需要家であっても、太陽光発電によって発生した余剰電力を電力供給側の電力会社に供給する場合もあるので、このような時間的に変動し得るパラメータについては、上述したアルゴリズム学習を用いて、その特性を示す内部モデルを作成することができる。
【0219】
したがって、このようなモデルが一旦構築されると、上述の目的関数Rを用いて電力フローを決定するロジックを用いて、近未来の電力需給状態に応じた適切な制御を行なうことができる。すなわち、近未来における、需要ノードでの使用電力の増大、あるいは、再生可能な自然エネルギー源の発電量の減少といった事象を考慮して、予め、発電所の発電量を増大させ、あるいは、蓄電器(バッテリ)からの放電量を増大させておくことができる。いわば、各ユーザの別に、電力需要情報を先取りして供給できるようになる(電力需要への先取り供給システム)。
【0220】
すなわち、図32および図33に示すシステムにおいては、需要ノードに関する現実の情報を取得して学習することにより、需要ノードで消費される電力(リソース)の大きさの時間に関する特性関数を決定する手段を有する。そして、目的関数の値を算出する際には、この特性関数により決定される未来のリソース消費量に基づいて、目的関数Rの値が算出される。
【0221】
より具体的には、上述したような需要と相関関係の高いデータを内部モデルとして予め自動的に学習することにより、変電所/配電所ノードに関する最大許容電力Bjmaxおよび最小許容電力Bjmin、ならびに、最大許容電力Qkmaxおよび需要電力Dkの値を随時更新することで、目的関数を環境に適合させて動的に変更することができる。
【0222】
(f4.実装例)
図36は、本実施の形態に従うアルゴリズム学習における実装例を模式的に示す図である。たとえば、入力データ/教師データとして、n次のベクトル量x={xi;1≦i≦n}の値が時系列に取得できるとする。すなわち、ベクトル量x(t)={xi(t)}が与えられるとする。
【0223】
このような場合、たとえば、10単位時間分のベクトル量x(t),x(t−1),…,x(t−9)は、図36に示すように、ユーザノードへ並列的に入力される。このようなベクトル量の入力が所定の時間繰返されながら前述のアルゴリズム学習が行われることで、内部モデルが作成される。
【0224】
<G.その他の適用例>
(g1.ミドルウェア層の実装)
上述の実施の形態においては、電力供給・需要制御システム(ミドルウェア層)を図2に示すようなコントローラ100を用いて実装する例について説明したが、予測学習層を実現するためのアルゴリズム可変ネットワーク(ATN)と同様のコンピュータ・ネットワークを用いて構成することもできる。
【0225】
この場合には、たとえば、図33に示すアーキテクチャにおいて、アプリケーション・レイヤーのすぐ下のところで動作するプログラムとして実装し、それによりインターネット上のオーバーレイ・ネットワーク(仮想ネットワーク層)中に、コンピュータ・ネットワークを構築する。
【0226】
この場合には、たとえば、発電所の供給電力についての制御を行なう制御信号は、仮想ネットワーク上を通信パケットの形で順次転送される。また、蓄電器ノードBjや需要ノードQkは、それぞれのユーザノードに対応する場所に位置することになる。
【0227】
また、管理者ノードでは、電力供給のネットワークが正常に動作していることを監視する。もし、災害などが原因で停電事故が起こると、直ちに迂回伝送路を通じて自動的に電力供給が復元される。このとき、各ノードの状態やシステム全体の目的関数Rの値を用いて、電力供給のネットワークが正常に回復されたかどうかを管理ノードにおいてモニタすることもできる。
【0228】
特願2008−274282号の明細書に詳述されているように、アルゴリズム可変ネットワーク(ATN)では、演算ノードとデータ転送エッジとからなるネットワークでアルゴリズムが表される。そして、計算処理は、データフロー(エージェント・フロー)方式により大規模・超並列・非同期的に進められる。さらに、アルゴリズム可変ネットワーク(ATN)では、誤差逆伝播学習による定数値補正とエッジ繋ぎ変えとにより、アルゴリズムが実行中に改変できるというメリットがある。
【0229】
(g2.その他の適用例)
上述の実施の形態においては、リソース(資源)の一例として電力に適用する例について説明したが、地球上に散在する自然産物、一般的な商品、希少金属などをリソースとした場合も適用できる。
【0230】
この場合には、上述の発電所ノードPiが生産地に対応付けられ、変電所/配電所ノードまたは蓄電器ノードBjが配送センターに対応付けられ、需要ノードQkが消費者に対応付けられる。また、電力伝送効率wijが輸送コストに対応付けられる。
【0231】
さらに、上述したような学習制御(サービス層)を組み合わせることで、需要が大きすぎてリソース(資源)の提供が不足するような場合であっても、動的なリソース配分を行なうことができる。
【0232】
<H.作用効果>
本実施の形態によれば、電力供給・需要制御システムにおいて、ユーザ(電力供給側および電力需要側の双方を含む)の利便性向上、電力負荷変動など環境変動への適応性、突発的な事故などへの耐故障性、システム運用管理の柔軟性などの種々の性能向上を図ることができる。すなわち、より完成度の高いネットワークベースの電力供給・需要制御システムを実現するために、設計段階から、多面的な検討を行なうことができる。それによって、現在開発が行われつつあるGreen ICT関連技術の質をさらに向上させることができる。
【0233】
また、学習制御によって各需要ノードにおける変動モデルを推定することで、設計方針を供給するのみならず、全体システムの運用における性能を向上することができる。
【0234】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて請求の範囲によって示され、請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0235】
10,20,30,30 フィールドコントローラ、11,21,31,42 ネットワークI/F、12,22,32 センサ、13,23,33 アクチュエータ、100 コントローラ、102 コンピュータ本体、104 モニタ、105 バス、106 フレキシブルディスク(FD)ドライブ、108 光ディスクドライブ、110 キーボード、112 マウス、118 ROM、120 CPU、122 メモリ、124 ハードディスク、128 通信インターフェイス、131 目的関数生成モジュール、132 目的関数算出モジュール、133 変数更新モジュール、134 収束モジュール判断、134 収束判断モジュール、135 パラメータファイル。
【特許請求の範囲】
【請求項1】
リソースを発生する第1のノードと前記リソースを消費する第2のノードとを含むネットワークにおけるリソースの配分に係る演算処理を行なうシステムであって、
目的関数を保持する手段を備え、前記目的関数は、
リソースの大きさに関して単調増加する、前記第1のノードから供給されるリソースに必要なコストの値を出力する第1の関数と、
前記第1のノードで発生したリソースのうち前記第2のノードへ供給されるリソースの大きさと、前記第2のノードで消費されるリソースの大きさとの差が大きくなるほどより大きな値を出力する、前記第1のノードから前記第2のノードへのリソースの経路における伝送率を変数として有する第2の関数とを含み、さらに、
前記第1のノードで発生するリソースの大きさを示す変数と、前記伝送率を示す変数とに基づいて前記目的関数の値を算出する手段と、
前記目的関数を前記リソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけ前記リソースの大きさを示す変数を更新する手段と、
前記目的関数を前記伝送率を示す変数で偏微分して得られる微分値に応じた値だけ前記伝送率を示す変数を更新する手段と、
前記更新後の値に基づいて、前記目的関数の値の算出を繰返す手段と、
前記目的関数の算出処理が収束したときの、前記リソースの大きさおよび前記伝送率を出力する手段とを備える、システム。
【請求項2】
前記目的関数は、
前記第1のノードで発生するリソースの大きさがゼロに近付くほどより大きな値を出力する第3の関数をさらに含む、請求項1に記載のシステム。
【請求項3】
前記目的関数は、
前記伝送率が「0」または「1」に近いほどより小さな値を出力する第4の関数をさらに含む、請求項1または2に記載のシステム。
【請求項4】
前記目的関数の値が新たに算出される前に、前記リソースの大きさを示す変数、および、前記伝送率を示す変数のいずれもが更新される、請求項1〜3のいずれか1項に記載のシステム。
【請求項5】
前記目的関数の値が新たに算出される前に、前記リソースの大きさを示す変数、および、前記伝送率を示す変数のいずれか一方が更新される、請求項1〜3のいずれか1項に記載のシステム。
【請求項6】
算出される前記目的関数の値が最小値を実質的に維持する状態になった場合に、前記目的関数の算出処理が収束したと判断する、請求項1〜5のいずれか1項に記載のシステム。
【請求項7】
前記ネットワークは、前記リソースを中継、または、前記リソースを蓄える第3のノードをさらに含み、
前記第2の関数は、前記第1のノードから前記第3のノードへ供給されるリソースの大きさに関する関数と、前記第1のノードから前記第2のノードへ供給されるリソースの大きさに関する関数と、前記第3のノードから前記第2のノードへ供給されるリソースの大きさに関する関数とを含む、請求項1〜6のいずれか1項に記載のシステム。
【請求項8】
前記第2のノードに関する現実の情報を取得して学習することにより、前記第2のノードで消費されるリソースの大きさの時間に関する特性関数を決定する手段をさらに備え、
前記目的関数の値を算出する手段は、前記特性関数により決定される未来のリソース消費量に基づいて、前記目的関数の値を算出する、請求項1〜7のいずれか1項に記載のシステム。
【請求項9】
前記ネットワークは、電力を供給するネットワークに対応付けられている、請求項1〜8のいずれか1項に記載のシステム。
【請求項10】
リソースを発生する第1のノードと前記リソースを消費する第2のノードとを含むネットワークにおけるリソース配分を決定する方法であって、
演算処理装置が、目的関数を保持するステップを備え、前記目的関数は、
リソースの大きさに関して単調増加する、前記第1のノードから供給されるリソースに必要なコストの値を出力する第1の関数と、
前記第1のノードで発生したリソースのうち前記第2のノードへ供給されるリソースの大きさと、前記第2のノードで消費されるリソースの大きさとの差が大きくなるほどより大きな値を出力する、前記第1のノードから前記第2のノードへのリソースの経路における伝送率を変数として有する第2の関数とを含み、さらに、
前記演算処理装置が、前記第1のノードで発生するリソースの大きさを示す変数と、前記伝送率を示す変数とに基づいて前記目的関数の値を算出するステップと、
前記演算処理装置が、前記目的関数を前記リソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけ前記リソースの大きさを示す変数を更新するステップと、
前記演算処理装置が、前記目的関数を前記伝送率を示す変数で偏微分して得られる微分値に応じた値だけ前記伝送率を示す変数を更新するステップと、
前記演算処理装置が、前記更新後の値に基づいて、前記目的関数の値の算出を繰返すステップと、
前記演算処理装置が、前記目的関数の算出処理が収束したときの、前記リソースの大きさおよび前記伝送率を出力するステップとを備える、方法。
【請求項1】
リソースを発生する第1のノードと前記リソースを消費する第2のノードとを含むネットワークにおけるリソースの配分に係る演算処理を行なうシステムであって、
目的関数を保持する手段を備え、前記目的関数は、
リソースの大きさに関して単調増加する、前記第1のノードから供給されるリソースに必要なコストの値を出力する第1の関数と、
前記第1のノードで発生したリソースのうち前記第2のノードへ供給されるリソースの大きさと、前記第2のノードで消費されるリソースの大きさとの差が大きくなるほどより大きな値を出力する、前記第1のノードから前記第2のノードへのリソースの経路における伝送率を変数として有する第2の関数とを含み、さらに、
前記第1のノードで発生するリソースの大きさを示す変数と、前記伝送率を示す変数とに基づいて前記目的関数の値を算出する手段と、
前記目的関数を前記リソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけ前記リソースの大きさを示す変数を更新する手段と、
前記目的関数を前記伝送率を示す変数で偏微分して得られる微分値に応じた値だけ前記伝送率を示す変数を更新する手段と、
前記更新後の値に基づいて、前記目的関数の値の算出を繰返す手段と、
前記目的関数の算出処理が収束したときの、前記リソースの大きさおよび前記伝送率を出力する手段とを備える、システム。
【請求項2】
前記目的関数は、
前記第1のノードで発生するリソースの大きさがゼロに近付くほどより大きな値を出力する第3の関数をさらに含む、請求項1に記載のシステム。
【請求項3】
前記目的関数は、
前記伝送率が「0」または「1」に近いほどより小さな値を出力する第4の関数をさらに含む、請求項1または2に記載のシステム。
【請求項4】
前記目的関数の値が新たに算出される前に、前記リソースの大きさを示す変数、および、前記伝送率を示す変数のいずれもが更新される、請求項1〜3のいずれか1項に記載のシステム。
【請求項5】
前記目的関数の値が新たに算出される前に、前記リソースの大きさを示す変数、および、前記伝送率を示す変数のいずれか一方が更新される、請求項1〜3のいずれか1項に記載のシステム。
【請求項6】
算出される前記目的関数の値が最小値を実質的に維持する状態になった場合に、前記目的関数の算出処理が収束したと判断する、請求項1〜5のいずれか1項に記載のシステム。
【請求項7】
前記ネットワークは、前記リソースを中継、または、前記リソースを蓄える第3のノードをさらに含み、
前記第2の関数は、前記第1のノードから前記第3のノードへ供給されるリソースの大きさに関する関数と、前記第1のノードから前記第2のノードへ供給されるリソースの大きさに関する関数と、前記第3のノードから前記第2のノードへ供給されるリソースの大きさに関する関数とを含む、請求項1〜6のいずれか1項に記載のシステム。
【請求項8】
前記第2のノードに関する現実の情報を取得して学習することにより、前記第2のノードで消費されるリソースの大きさの時間に関する特性関数を決定する手段をさらに備え、
前記目的関数の値を算出する手段は、前記特性関数により決定される未来のリソース消費量に基づいて、前記目的関数の値を算出する、請求項1〜7のいずれか1項に記載のシステム。
【請求項9】
前記ネットワークは、電力を供給するネットワークに対応付けられている、請求項1〜8のいずれか1項に記載のシステム。
【請求項10】
リソースを発生する第1のノードと前記リソースを消費する第2のノードとを含むネットワークにおけるリソース配分を決定する方法であって、
演算処理装置が、目的関数を保持するステップを備え、前記目的関数は、
リソースの大きさに関して単調増加する、前記第1のノードから供給されるリソースに必要なコストの値を出力する第1の関数と、
前記第1のノードで発生したリソースのうち前記第2のノードへ供給されるリソースの大きさと、前記第2のノードで消費されるリソースの大きさとの差が大きくなるほどより大きな値を出力する、前記第1のノードから前記第2のノードへのリソースの経路における伝送率を変数として有する第2の関数とを含み、さらに、
前記演算処理装置が、前記第1のノードで発生するリソースの大きさを示す変数と、前記伝送率を示す変数とに基づいて前記目的関数の値を算出するステップと、
前記演算処理装置が、前記目的関数を前記リソースの大きさを示す変数で偏微分して得られる微分値に応じた値だけ前記リソースの大きさを示す変数を更新するステップと、
前記演算処理装置が、前記目的関数を前記伝送率を示す変数で偏微分して得られる微分値に応じた値だけ前記伝送率を示す変数を更新するステップと、
前記演算処理装置が、前記更新後の値に基づいて、前記目的関数の値の算出を繰返すステップと、
前記演算処理装置が、前記目的関数の算出処理が収束したときの、前記リソースの大きさおよび前記伝送率を出力するステップとを備える、方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
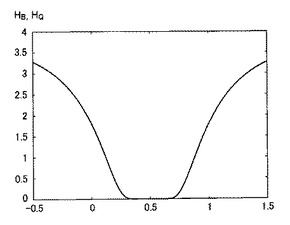
【図7】
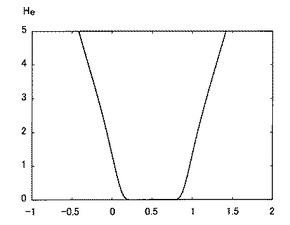
【図8】
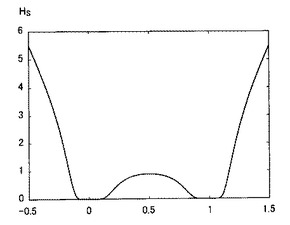
【図9】
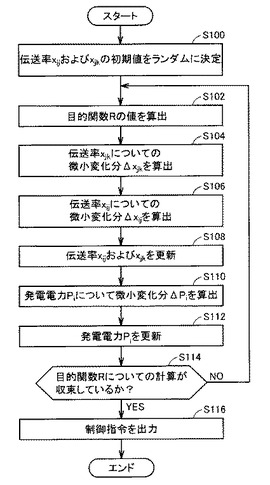
【図10】
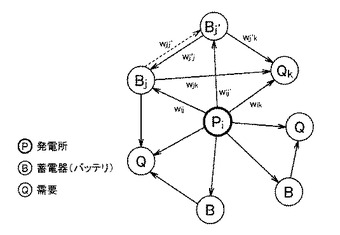
【図11】
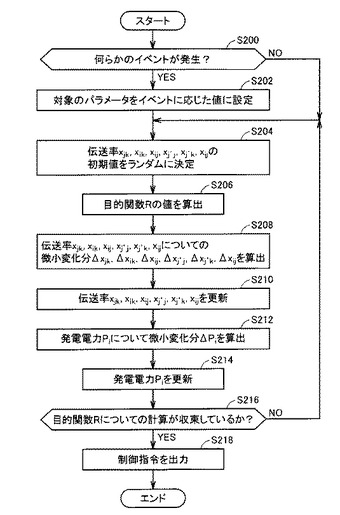
【図12】
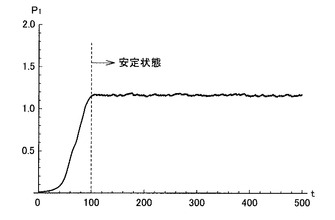
【図13】
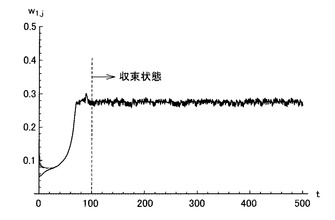
【図14】
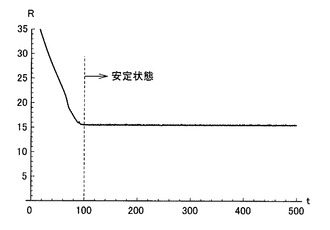
【図15】
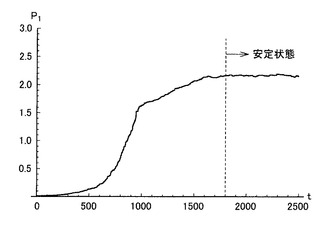
【図16】
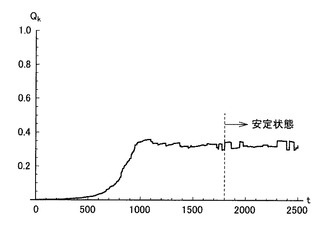
【図17】
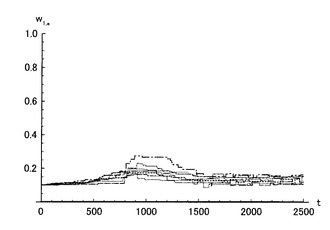
【図18】
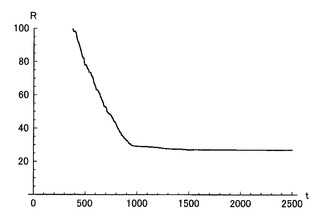
【図19】
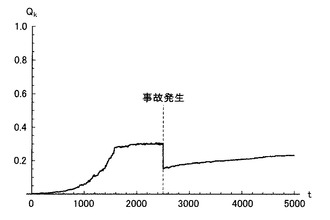
【図20】
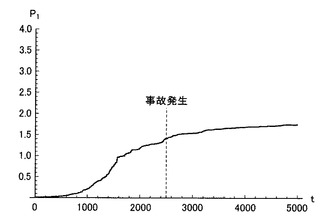
【図21】
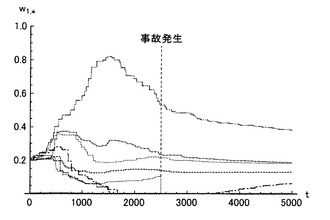
【図22】
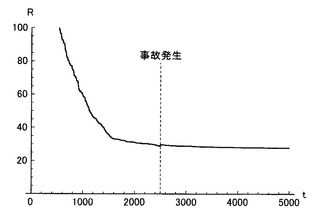
【図23】
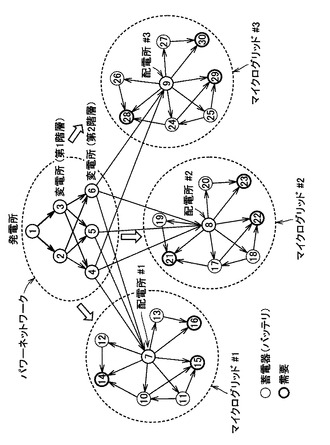
【図24】
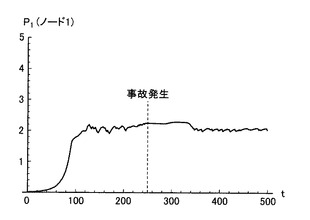
【図25】
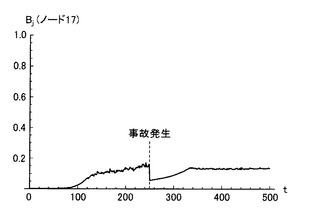
【図26】
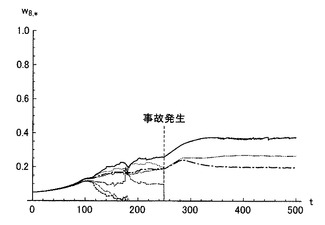
【図27】
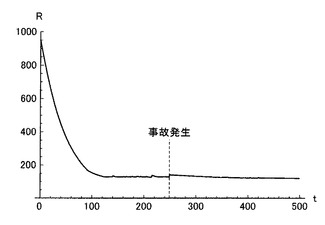
【図28】
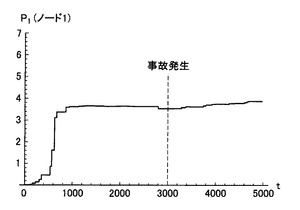
【図29】
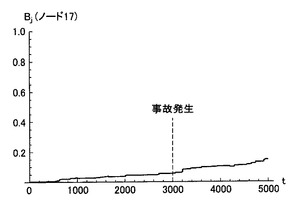
【図30】
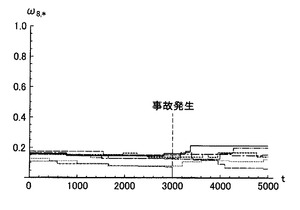
【図31】
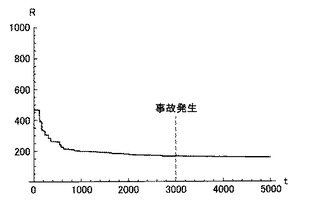
【図32】
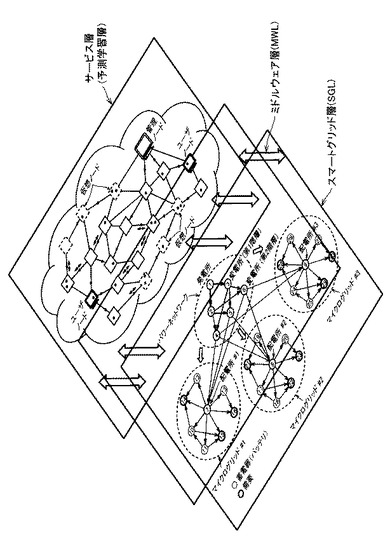
【図33】
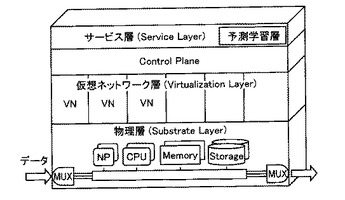
【図34】
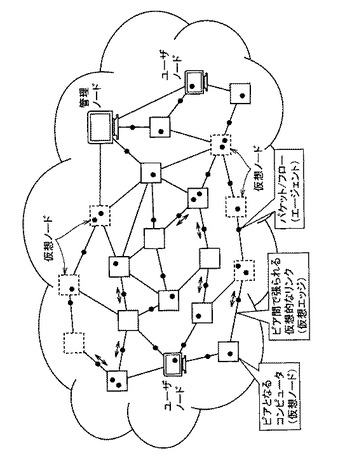
【図35】
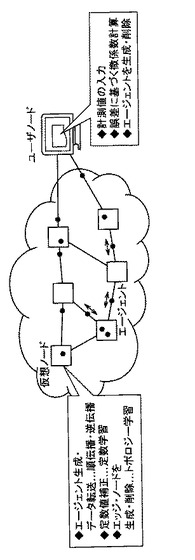
【図36】
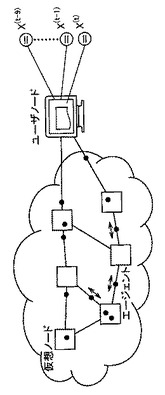
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【公開番号】特開2012−68947(P2012−68947A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2010−213816(P2010−213816)
【出願日】平成22年9月24日(2010.9.24)
【出願人】(301022471)独立行政法人情報通信研究機構 (1,071)
【Fターム(参考)】
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成22年9月24日(2010.9.24)
【出願人】(301022471)独立行政法人情報通信研究機構 (1,071)
【Fターム(参考)】
[ Back to top ]