
リチャージ井戸の制御システム及びこの井戸の制御方法
【課題】井戸内の水位の変動に対応して確実かつ効率的に逆洗浄を行うことができるリチャージ井戸の制御システム及びこの井戸の制御方法を提供する。
【解決手段】井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸の制御システムであって、
井戸内への注水管12及び井戸内からの揚水管14と、井戸内の水位を測るための測位手段18と、目詰まりを生ずる前の設計注水流量に対する標準水位h1に応じて、標準水位よりも高い管理水位h2と標準水位よりも低い下方水位h3との間に井戸の水位を保つための制御部20とを具備し、この制御部20は、注水行程で水位が管理水位h2に達すると注水モードから揚水モードに切り替え、揚水行程で水位が下方水位h3まで下がったときに揚水モードから注水行程に戻すように構成している。
【解決手段】井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸の制御システムであって、
井戸内への注水管12及び井戸内からの揚水管14と、井戸内の水位を測るための測位手段18と、目詰まりを生ずる前の設計注水流量に対する標準水位h1に応じて、標準水位よりも高い管理水位h2と標準水位よりも低い下方水位h3との間に井戸の水位を保つための制御部20とを具備し、この制御部20は、注水行程で水位が管理水位h2に達すると注水モードから揚水モードに切り替え、揚水行程で水位が下方水位h3まで下がったときに揚水モードから注水行程に戻すように構成している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、リチャージ井戸の制御システム及びこの井戸の制御方法に関する。
【背景技術】
【0002】
従来、建物の基礎工事として根切工事などを行う際に、地下水を揚水することによって地下水位を下げ、ドライワークを可能にすることが一般に行なわれる。しかし、地下水を揚水すると周辺地盤の沈下などを生ずる可能性がある。そこでこれを防止するために、揚水された地下水を近傍のリチャージ井戸を通じて地盤中へ戻すリチャージ工法(復水工法)が行われている(特許文献1)。また、こうしたリチャージ工法において水路(復水井戸)の目詰まりを防止するために揚水して逆洗浄を行うことも知られている(特許文献2)。
【特許文献1】特開平06−306842
【特許文献2】特開2003−321991号
【発明の開示】
【発明が解決しようとする課題】
【0003】
前述の目詰まりは、懸濁物・微生物・化学反応生成物などを含む注入水の水質不良、ケーシングの腐食や洗浄不足などに起因する。従来のリチャージ工法において逆洗浄を行うときには、1日に1〜2回のように時間で洗浄を管理することが多いが、上記の目詰まりの速度は必ずしも一定ではないので、これでは、洗浄により除去できない細粒分が井戸周辺に蓄積される可能性が高い。また井戸の周辺に遍在する細粒分を取り除くことは短時間の逆洗浄では困難であるが、単純に長い時間(例えば1〜2時間)逆洗浄を行うと、その途中で細粒分の除去効果が低下する。
【0004】
そこで本発明は、井戸内の水位の変動に対応して確実かつ効率的に逆洗浄を行うことができるリチャージ井戸の制御システム及びこの井戸の制御方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
第1の手段は、
井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸の制御システムであって、
井戸内への注水管12及び井戸内からの揚水管14と、
井戸内の水位を測るための測位手段18と、
目詰まりを生ずる前の設計注水流量に対する標準水位h1に応じて、標準水位よりも高い管理水位h2と標準水位よりも低い下方水位h3との間に井戸の水位を保つための制御部20とを具備し、
この制御部20は、注水行程で水位が管理水位h2に達すると注水モードから揚水モードに切り替え、揚水行程で水位が下方水位h3まで下がったときに揚水モードから注水行程に戻すように構成している。
【0006】
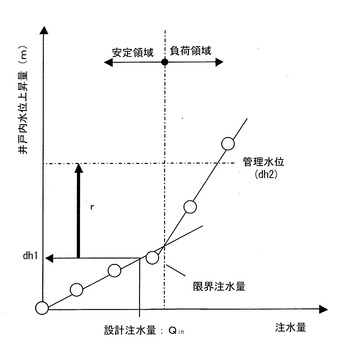
本手段では、井戸周りの水の通り道の目詰まりに伴って井戸の水位が上昇することに着目し、水位が管理水位まで到達したときに標準水位よりも低位の水位まで下げることを提案している。目詰まりの原因としては、前述の水質不良及び洗浄不足の他、図14に示すように細粒分の移動→細粒分の抑留→粒子の再配列により透水性が低下するためと理解される。そして、出願人がリチャージ井戸の目詰まりを観察したところ、井戸内の水位は、図4に示すように注水流量が限界注水流量に達するまでは徐々に上昇し、注水流量が限界注水流量を超えると急に上昇することが判った。限界注水流量までの領域は、還水の通り道が詰まっていない、安定した状態であり、限界注水流量を超えた領域は、還水の通り道が詰まった負荷状態である。一般にリチャージ井戸は、注水流量が安定領域にある状態で使用されるように設計することが好適である。そこで本発明では逆洗浄をする際には設計注水流量に対応する標準水位よりも低位のレベルまで水位を下げることにしている。
「管理水位」とは、本明細書において、井戸内のレベルを当該水位以下に保つべき目標値である。
「標準水位」は、井戸の運転水位のうち標準的な状態での水位ということであり、井戸の自然水位に、設計注水流量を注入することによる水位の上昇分を加えたレベルである。
「還水の通り道」とは、主として井戸に隣接する土壌部分をいう。
【0007】
第2の手段は、第1の手段に記載したリチャージ井戸の制御システムであって、
上記制御部20は、最初の揚水行程で水位が下方水位h3まで下がったときに、
直ちに注水モードに切り替わる代わりに、井戸中の水位が管理水位を超えない範囲で次の(1)又は(2)の2種類の状態を繰り返した後に注水モードに切り替わるように構成している。
(1)揚水を停止する状態と揚水を開始する状態 (2)井戸内へ地下水が入る勢いよりも揚水流量を減じた状態と揚水流量を元に戻した状態。
【0008】
本手段では、揚水、即ち逆洗浄を繰り返すことで還水の通り道の目詰まりを解消するようにしている。単に同じ割合で揚水を続けると目詰まりの原因である細粒分の回収率が低下することが知られている。そこで揚水による井戸周辺の負圧のレベルを増減することで細粒分の動きを促進し、その回収効率を高めるようにしている。その負圧のレベル差は大きいほどよいので、本手段の実施形態としては、揚水と揚水停止を繰り返すことが望ましい。しかし揚水量を増減する程度でも効果がある。
【0009】
第3の手段は、第1の手段又は第2の手段を有し、かつ
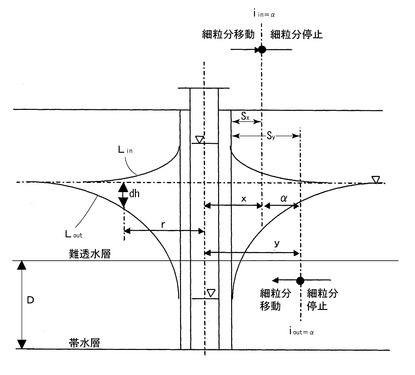
制御部20は、目詰まりの原因である細粒分の回収率を高めるために、注水時に細粒分が井戸の外壁から出て周辺地盤中の動水勾配の低減により停止するまでの領域SXよりも、揚水時に周辺地盤から井戸へ向かう動水勾配により土中の細粒分が移動する領域SYが広範囲となるように注水流量[L/min]と揚水流量[L/min]とを調節している。
【0010】
土壌中の細粒分が移動するためには、水圧(注水時の正圧又は揚水時の負圧)が一定圧−主として土壌からの抵抗に相当する圧−以上であることが必要である。井戸周辺の水圧は井戸から離れるに従って零に近づくので、注水時に井戸から流出した水に含まれる細粒分は一定距離移動した後に停止する。注水時に細粒分が井戸から到達し得る最大の距離をxとし、同様に揚水時に細粒分が井戸に引かれ得る最大の距離をyとすると、x>yであると、y〜xの範囲に細粒分に蓄積されてしまう。そこで本手段ではy>xとなるように注水流量及び揚水流量を調整するようにしている。そのためには、揚水時の負圧の絶対値が注水時の正圧の絶対値より大きくなるようにすればよい。具体的な操作の手順は、設計者が注水流量及び揚水流量の数値を仮に設定して入力した後、井戸周辺の水位分布の算定、水位分布からの動水勾配の算定、動水勾配からのSX及びSYの範囲の計算、SYがSXより広くなるように注水流量及び揚水流量の調節の各段階により行う。各段階の具体的な内容については後述するが、これら各各段階を制御部が全自動で計算するようにしてもよく、また各段階の計算結果をインターフェイスを通じて設計者に提示し、設計者の承認を得て次の段階に進むようにしてもよい。
【0011】
第4の手段は、
井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸を制御する方法であって、
予め注水流量と井戸内の水位上昇との関係を測定した注水試験の結果に応じて、設計注水流量に対する標準水位h1と、標準水位より高い管理水位h2及び標準水位よりも低い下方水位h3とを設定する行程と、
その設計注水流量で注水を行う行程と、
還水の通り道の目詰まりにより井戸内の水位が管理水位h2に達すると注水を停止して揚水を行う行程と、
揚水により井戸内水位が下方水位h3に達したときに揚水モードを注水モードに切り替える行程を含んでいる。
【0012】
本手段は、第1の手段のシステムに対応する方法であり、第1の手段に関して記載したことは本手段に援用する。注水時の井戸内の水位の上昇し易さは井戸の構造だけでなく、井戸周りの土壌の性質に左右されるため、現場ごとに注水試験を行い、設計注水流量及び標準水位を設定することが望ましい。揚水行程により標準水位より下方の水位まで揚水するため、揚水流量を大きくして逆洗浄の効果を大きくすることができる。各行程の切り替えは機械制御で自動的に行うことができるが、人の判断で切り替えるようにしてもよい。
【0013】
第5の手段は、第4の手段を有し、
前述の注水試験として、注水流量を段階的に変化させて井戸内の水位上昇量を測定する段階注水試験を行い、
還水の通り道の目詰まりにより水位上昇量が急増するときの注水流量を限界注水流量とし、
この限界注水流量より低く設計注水流量を設定するとともに、この設計注水流量を注水したときの井戸内の水位を標準水位としている。
【0014】
限界注水流量を超えると、水位の上昇が早くなるために水位を管理水位以下に管理するという面からは好ましくない。そこで本手段では、限界注水水位よりも下方に設計注水流量を設定するようにしている。
【0015】
第6の手段は、第4の手段又は第5の手段に記載したリチャージ井戸を制御する方法であって、
揚水により井戸内水位が下方水位h3に達したときに揚水モードを注水モードに切り替える行程の代わりに、井戸中の水位が管理水位を超えない範囲において、次の(1)又は(2)の所定の設計時間に亘る2種類の状態を繰り返した後に注水モードに切り替わるように構成している。
(1)揚水を停止する状態と揚水を開始する状態 (2)井戸内へ地下水が入る勢いよりも揚水流量を減じた状態と揚水流量を戻した状態。
【0016】
本手段は、揚水行程を繰り返す、リチャージ井戸の制御方法である。第2の手段に関して記載したことは本手段に援用する。
【0017】
第7の手段は、第4の手段から第6の手段のいずれかを有し、
標準水位の設定に先立つ予備の行程として、
井戸の状態に応じて設計注水流量Qinと揚水流量Qoutを仮設定し、
これらの設計注水流量及び揚水流量から井戸近傍の水位分布を算定し、
算出した水位分布から注水時の動水勾配を算定し、細粒分が移動し得る最小動水勾配を生ずる場所の、井戸からの距離をXとし、
算出した水位分布から揚水時の動水勾配を算定し、細粒分が移動し得る最小動水勾配を生ずる場所の、井戸からの距離をYとし、
Y≧X+α(但しαは任意に設定した定数)となるように設計注水流量Qinと揚水流量Qoutとを調整することを内容としている。
【0018】
本手段は、細粒分が拡散する範囲より細粒分を井戸に回収できる範囲が広くなるように設計する方法である。第3の手段のシステムに対応する方法であり、第3の手段に関して記載したことは本手段に援用する。水位分布hの算定は、後述のTheisの式(数式1、数式2)により行うことができる。更に動水勾配の算定は数式3により、流速の算定は数式4により行うことができる。
【0019】
第8の手段は、第7の手段を有し、かつ
水が距離yを移動する必要時間toutを算定して、1作業サイクル当りの累積揚水量と累積注水量との比〔(Qout×tout)/(Qin×tin)〕が定数β以下となるように設計注水流量Qinと揚水流量Qoutとを再調整することを内容としている。
【0020】
作業サイクルとは任意の作業時間の単位であり、本手段では、1作業サイクルの範囲(例えば一日)で累積揚水量と累積注水量との比が一定以下となるようにしている。これによりリチャージ井戸の全体の制御効率を高めることができる。
【発明の効果】
【0021】
第1、第4の発明によれば、逆洗浄の時期を時間で管理する方式に比べて井戸内の水位に応じて行うから井戸の目詰まりが進行する前に確実に逆洗浄することができる。
【0022】
第2、第6の発明によれば、繰り返し揚水を行うから、細粒分の除去率が低下することがなく、排水の無駄を防止することができる。
【0023】
第3、第7の発明によれば、注水時に細粒分が井戸から到達する範囲よりも、揚水時に細粒分が井戸側へ引き戻される範囲を広くしたから、細粒分が井戸の周辺に蓄積されることがない。
【0024】
第5の発明によれば、段階注水試験をしたから、限界注水流量を正確に把握することができ、注水流量及び標準水位を合理的に設計することができる。
【0025】
第8の発明によれば、1作業サイクルの範囲で累積揚水量と累積注水量との比が一定以下となるようにしたから、リチャージ井戸の全体の制御効率を高めることができる。
【発明を実施するための最良の形態】
【0026】
図1〜図6は、本発明のリチャージ井戸の制御システムの構成図を示している。
【0027】
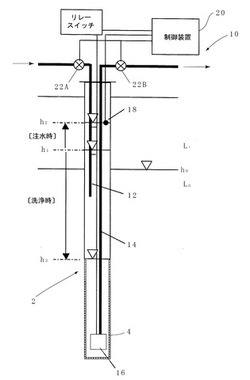
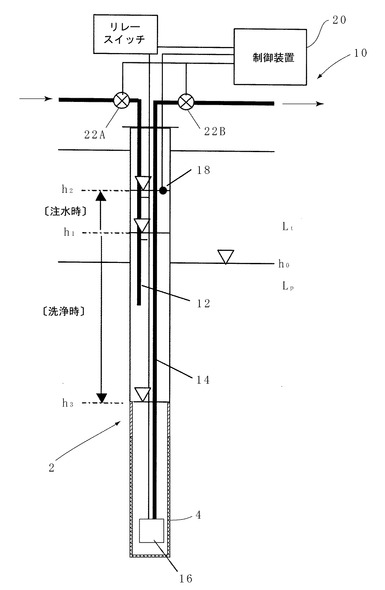
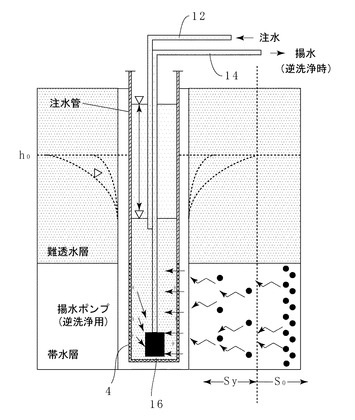
同図中、Liは難透水層であり、Lpは帯水層であり、2は井戸である。井戸の囲壁下端部には、帯水層Lpに連通する通水部4が形成されている。
【0028】
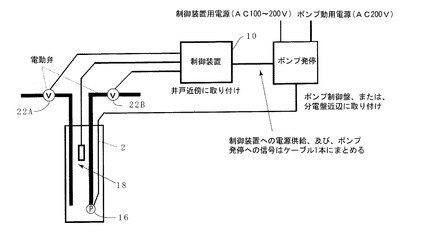
この井戸の制御システム10は、注水管12と、揚水管14と、水位計である測位手段18と、制御部20とで構成されている。注水管12は井戸の途中まで延びており、揚水管14は井戸の下端部内まで延びている。揚水管14の下端部には揚水ポンプ16が付設されている。測位手段18は、後述の管理水位に相当する位置に設置されている。注水管12及び揚水管14にはそれぞれ電動弁22A、22Bを設けている。
【0029】
制御部20は、地上に設置されており、測位手段18、電動弁22A、22B、揚水ポンプ16、及び図示しない送水ポンプに接続している。そして、測位手段22の測定値に応じて、電動弁22、揚水ポンプ16、及び注水ポンプを作動させ、注水能力の経時的な低下を井戸内水位の上昇量で管理する機能を有している。制御部20は、演算処理手段と、演算に必要な数式などを記憶する記憶手段と、入出力手段とを備えていることが望ましい。入出力手段は、測位手段からの入力、電動弁や各ポンプへの出力の他、演算結果を数値やグラフとして表示する対人インターフェイスを備えているものとすることができる。
【0030】
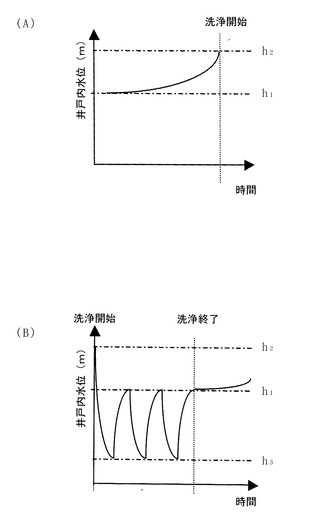
なお、図2において、h0は、注水・揚水前の井戸の水位(自然水位)であり、h1は設計注水流量を注水したときの水位(標準水位)であり、h2は、当該数値以下に井戸の水面を管理すべき水位であり(管理水位)、h3は、揚水行程により井戸内の水面を下降させるべき目標値である。
【0031】
より詳しい機能の解説は、本発明の制御方法の説明と併せて行う。なお、この方法発明の第1の実施形態である水位による注水・揚水行程の制御(揚水行程の繰り返し制御を含む)、及び第2の実施形態である注水流量及び揚水流量の調整は、並行して行うことが望ましいが、説明の都合上、別々に扱うものとし、まず第1実施形態について説明する。
【0032】
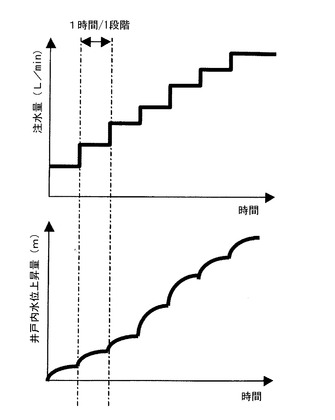
第1段階として、システムの設計者は、制御部20を操作して、注水量を段階的に上昇させ、注水流量と水位を計測する段階注水試験を行う。図3は段階注水試験の測定結果を示すものであり、図4は実験結果を分析したものである。次に設計者は、この分析内容を利用して、限界注水流量を超えない範囲で標準水位dh1を設定する(但しdh1=h1−h0)。
【0033】
標準水位の算定に関しては、安全率を考慮して、限界注水量の80%や90%に対応した水位をh1と決めてもよく、また揚水量が限界注水量に対して余裕度が大きい場合は、揚水量と同じ注水量に対応した水位をh1と決めてもよい。これらの決定は、制御装置20からの問いに答える形で作業員が入力するようにしてもよく、また上記の決定方法を予め制御装置に記録しておいて自動演算するようにしてもよい。
【0034】
第2段階として、設計者は、dh1+γ(例γ=1.0m)の位置を管理水位と設定し、この場所に測位手段を設置する。
【0035】
第3段階として、制御部20は、井戸の目詰まりの進行に伴い、井戸内水位が管理水位まで上昇すると、注水管電動弁22Aをオフ、揚水ポンプのリレースイッチをオンとし、揚水管電動弁22Bの制御により揚水行程と行う。揚水行程は、繰り返し操作することが望ましい。これに関しては別に説明する。
【0036】
第4段階として、制御部20は、揚水行程終了後に、揚水ポンプリレースイッチをオフ、注水管電動弁をオンとし、通常の注水運転を開始する。
【0037】
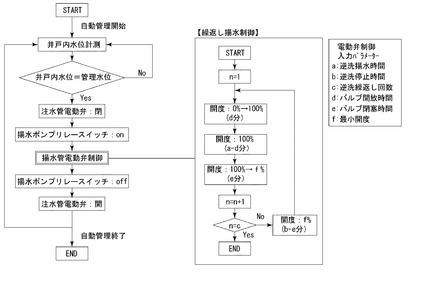
上記各段階のうち第1、第2段階はいわば準備段階であり、第3、第4は制御部による自動管理の段階である。第3、第4段階以降の操作は図6のフローチャートに示されている。
【0038】
上記第3段階に関して、(1)制御部20は、繰り返し揚水のために弁を開放した後、設定した揚水時間(a分)まで揚水管電動弁の開度を100%に継続する。より正確には、図6の右半部に記載されているように、弁の開放に要する時間をdとすると、その間は弁の開度は0〜100%であり、次の(a−d)の間は弁の開度は100%である。
(2)次に制御部は、所定の揚水時間(a分)経過の後、揚水管電動弁を最小開度f%まで閉じて、設定した停止時間(b分)まで揚水した後、停止(又は減衰)する。より正確には、図6に記載されている通り、逆洗浄時間bから弁閉塞時間eを除いた時間の間、弁の開度を最小開度fに保つことになる。
【0039】
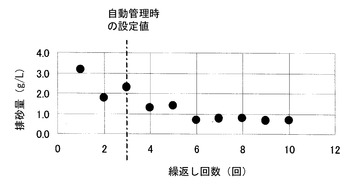
(3)そして制御部は、予め設定された繰り返し回数で(1)(2)を繰り返す。ここで、設計者は、図11に示すように、流量・水位・排砂量を計測する逆洗浄試験を行い、この試験から繰り返し揚水の揚水時間、停止時間、排砂効率の良い繰り返し回数を設定する。図示の例では、3回までと、4回以降とで排砂量に差があるので、繰り返し回数を3回と選ぶとよい。なお、流量、水位は、細粒分を引き戻せる範囲の算定結果から設定すればよく、また逆洗浄試験では、設定した流量、水位の条件下での水位低下時間、排砂量を計測すればよい。
【0040】
図7〜図12は、本発明の第2の実施形態を示している。図7は、揚水行程での井戸の周りの動水勾配線を示している。この勾配が大きい範囲Syでは細粒分を井戸側に引き戻すことができるが、勾配が小さい範囲S0では細粒分を井戸側へ引き戻すことができない。そこで本実施形態では、注水段階での細粒分の到達範囲SxはSyに比べて狭くとるようにしている。
(1)第1段階として、設計者は、段階注水試験から設計注水流量Qinを設定し、図11の逆洗浄試験から逆洗浄時の揚水流量Qoutを設計する。
(2)第2段階として、制御部20は、注水時のQinと揚水時の揚水流量Qoutとから、井戸近傍の水位分布を算定する。水位分布hの算定は、例えば次のTheisの式により行うことができる。制御部には、これらの式を予め入力しておき、設計者が注水流量Qin及び揚水流量Qoutを入力すると、水位分布を算出するようにするとよい。
【0041】
[数式1] dh=0.0796W(u)Q/kD
[数式2] u=r2S/4kDt
但しdh:井戸からr(m)の位置における水位変動量、Q:注水流量又は揚水流量(L/min)、k:透水係数(m/min)、D:帯水層厚(m)、S:貯留係数、t:揚水継続時間(min)、W(u):uの井戸係数
図10には、注水時の水位分布Lin及び揚水時の水位分布Loutがそれぞれ示されている。各水位分布は井戸から離れるにつれて帯水層Lpの上端面に漸近する曲線となる。この漸近線から各水位分布までの高低差は、注水流量及び揚水流量の大きさに依存する。揚水流量を注水流量より大きくすると、同図の如く揚水時の水位分布の絶対値が大きくなる。
(3)第3段階として、算定した水位分布から注水時の動水勾配iinを算出し、図10に示す如くこれが最小動水勾配icrとなる井戸からの距離xを算定する。最小動水勾配とは、細粒分が移動し始める勾配である。動水勾配は次の数式3で計算すればよい。例えば最小動水勾配を1とすると、iin=1のラインと注水時の水位分布Linとが交差する箇所と井戸との間の距離をxとすればよい。
【0042】
[数式3] iin=(dhi+1−dhi)/(ri+1−ri)
iin:区間iの動水勾配、hi:地点における水位低下量(m)、ri:井戸から地点iまでの距離
(4)第4段階として、第3段階と同様な方法で、揚水時の動水勾配ioutが最小動水勾配icrとなる井戸からの距離yを算定する。
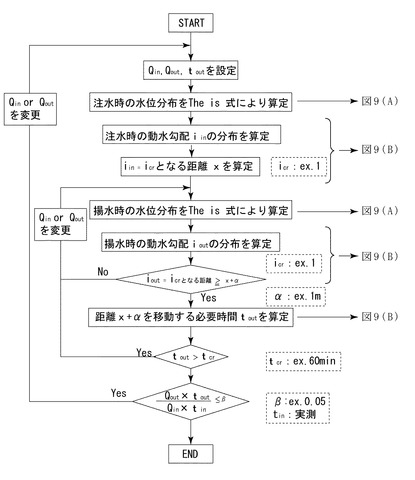
(5)第5段階として、y≧x+αとなるように注水流量Qin及び揚水流量Qoutを調整する。具体的にはy<x+αであるときには揚水流量を一定値増やして(或いは注水流量を一定値減らして)、(2)から(4)の操作を行うということを、y≧x+αを満たすようになるまで繰り返せばよい(図8参照)。ここでαはアローアンスであり、例えばα=0.5mのように定める。目詰まりの進行は常に一定とは限らないのでアローアンスを含めて設計することが重要である。
(6)第6段階として、1日あたりの累積揚水量と累積注水量との比〔(Qout×tout)/(Qin×tin)〕が定数β以下となるように設計注水流量Qinと揚水流量Qoutとを再調整する。tinは注水時間であり、注水ポンプの作動時間を制御部20に記録しておいて、その数値を用いればよい。toutは細粒分が距離yを移動するのに要する時間であり、次の数式4により定めることができる。viは区間iでの流速であり、vi=k×iiで与えられる。kは透水係数(m/min)である。また、ri+1、riは井戸から地点i+1、地点iまでの距離である。
【0043】
[数式4] t=Σ1y((ri+1−ri)/vi
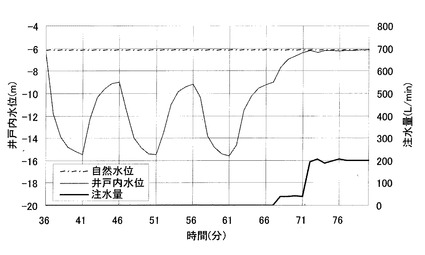
図12及び図13は、本実施形態の自動洗浄を行ったときの実験例である。システムの構成例は図1に示す通りであり、ポンプ動力電源はAC200V,注水量は0〜200(L/min)である。3回の繰り返し洗浄を行うことで井戸内の水位が自然水位に復帰することが確認され、十分な逆洗浄の効果が得られた。
【0044】
なお、上記の実施形態は好適な実施の1例に過ぎず、本発明の趣旨を逸脱しない範囲に限りにおいて、その例示した事柄に限定されるものではない。
【図面の簡単な説明】
【0045】
【図1】本発明の第1実施形態に係る井戸の制御装置及び制御方法の概念図である。
【図2】第1実施形態の作用を示す説明図である。
【図3】第1実施形態の段階注水試験の説明図である。
【図4】図4の試験結果の分析図である。
【図5】第1実施形態での水位の変化を示すもので、同図(A)は注水時の水位の変化を、同図(B)は洗浄時の井戸内水位の変化をそれぞれ表している。
【図6】第1実施形態の行程のフローチャートである。
【図7】本発明の第2実施形態に係る井戸の制御装置及び制御方法の概念図である。
【図8】第2実施形態の行程のフローチャートである。
【図9】第2実施形態に関して、同図(A)は水位分布の算定例を、同図(B)は動水勾配分布の算定例を、同図(C)は流速の算定例をそれぞれ示している。
【図10】第2実施形態の原理図である。
【図11】第2実施形態における逆洗浄試験の結果を示すものである。
【図12】第2実施形態の実験例である。
【図13】同例の実験結果を示している。
【図14】リチャージ井戸の目詰まりの現象の説明図である。
【符号の説明】
【0046】
2…井戸 4…通水部 10…制御システム 12…注水管 14…揚水管
16…揚水ポンプ 18…測位手段 20…制御部 22…電動弁
Li…難透水層 Lp…帯水層
【技術分野】
【0001】
本発明は、リチャージ井戸の制御システム及びこの井戸の制御方法に関する。
【背景技術】
【0002】
従来、建物の基礎工事として根切工事などを行う際に、地下水を揚水することによって地下水位を下げ、ドライワークを可能にすることが一般に行なわれる。しかし、地下水を揚水すると周辺地盤の沈下などを生ずる可能性がある。そこでこれを防止するために、揚水された地下水を近傍のリチャージ井戸を通じて地盤中へ戻すリチャージ工法(復水工法)が行われている(特許文献1)。また、こうしたリチャージ工法において水路(復水井戸)の目詰まりを防止するために揚水して逆洗浄を行うことも知られている(特許文献2)。
【特許文献1】特開平06−306842
【特許文献2】特開2003−321991号
【発明の開示】
【発明が解決しようとする課題】
【0003】
前述の目詰まりは、懸濁物・微生物・化学反応生成物などを含む注入水の水質不良、ケーシングの腐食や洗浄不足などに起因する。従来のリチャージ工法において逆洗浄を行うときには、1日に1〜2回のように時間で洗浄を管理することが多いが、上記の目詰まりの速度は必ずしも一定ではないので、これでは、洗浄により除去できない細粒分が井戸周辺に蓄積される可能性が高い。また井戸の周辺に遍在する細粒分を取り除くことは短時間の逆洗浄では困難であるが、単純に長い時間(例えば1〜2時間)逆洗浄を行うと、その途中で細粒分の除去効果が低下する。
【0004】
そこで本発明は、井戸内の水位の変動に対応して確実かつ効率的に逆洗浄を行うことができるリチャージ井戸の制御システム及びこの井戸の制御方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
第1の手段は、
井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸の制御システムであって、
井戸内への注水管12及び井戸内からの揚水管14と、
井戸内の水位を測るための測位手段18と、
目詰まりを生ずる前の設計注水流量に対する標準水位h1に応じて、標準水位よりも高い管理水位h2と標準水位よりも低い下方水位h3との間に井戸の水位を保つための制御部20とを具備し、
この制御部20は、注水行程で水位が管理水位h2に達すると注水モードから揚水モードに切り替え、揚水行程で水位が下方水位h3まで下がったときに揚水モードから注水行程に戻すように構成している。
【0006】
本手段では、井戸周りの水の通り道の目詰まりに伴って井戸の水位が上昇することに着目し、水位が管理水位まで到達したときに標準水位よりも低位の水位まで下げることを提案している。目詰まりの原因としては、前述の水質不良及び洗浄不足の他、図14に示すように細粒分の移動→細粒分の抑留→粒子の再配列により透水性が低下するためと理解される。そして、出願人がリチャージ井戸の目詰まりを観察したところ、井戸内の水位は、図4に示すように注水流量が限界注水流量に達するまでは徐々に上昇し、注水流量が限界注水流量を超えると急に上昇することが判った。限界注水流量までの領域は、還水の通り道が詰まっていない、安定した状態であり、限界注水流量を超えた領域は、還水の通り道が詰まった負荷状態である。一般にリチャージ井戸は、注水流量が安定領域にある状態で使用されるように設計することが好適である。そこで本発明では逆洗浄をする際には設計注水流量に対応する標準水位よりも低位のレベルまで水位を下げることにしている。
「管理水位」とは、本明細書において、井戸内のレベルを当該水位以下に保つべき目標値である。
「標準水位」は、井戸の運転水位のうち標準的な状態での水位ということであり、井戸の自然水位に、設計注水流量を注入することによる水位の上昇分を加えたレベルである。
「還水の通り道」とは、主として井戸に隣接する土壌部分をいう。
【0007】
第2の手段は、第1の手段に記載したリチャージ井戸の制御システムであって、
上記制御部20は、最初の揚水行程で水位が下方水位h3まで下がったときに、
直ちに注水モードに切り替わる代わりに、井戸中の水位が管理水位を超えない範囲で次の(1)又は(2)の2種類の状態を繰り返した後に注水モードに切り替わるように構成している。
(1)揚水を停止する状態と揚水を開始する状態 (2)井戸内へ地下水が入る勢いよりも揚水流量を減じた状態と揚水流量を元に戻した状態。
【0008】
本手段では、揚水、即ち逆洗浄を繰り返すことで還水の通り道の目詰まりを解消するようにしている。単に同じ割合で揚水を続けると目詰まりの原因である細粒分の回収率が低下することが知られている。そこで揚水による井戸周辺の負圧のレベルを増減することで細粒分の動きを促進し、その回収効率を高めるようにしている。その負圧のレベル差は大きいほどよいので、本手段の実施形態としては、揚水と揚水停止を繰り返すことが望ましい。しかし揚水量を増減する程度でも効果がある。
【0009】
第3の手段は、第1の手段又は第2の手段を有し、かつ
制御部20は、目詰まりの原因である細粒分の回収率を高めるために、注水時に細粒分が井戸の外壁から出て周辺地盤中の動水勾配の低減により停止するまでの領域SXよりも、揚水時に周辺地盤から井戸へ向かう動水勾配により土中の細粒分が移動する領域SYが広範囲となるように注水流量[L/min]と揚水流量[L/min]とを調節している。
【0010】
土壌中の細粒分が移動するためには、水圧(注水時の正圧又は揚水時の負圧)が一定圧−主として土壌からの抵抗に相当する圧−以上であることが必要である。井戸周辺の水圧は井戸から離れるに従って零に近づくので、注水時に井戸から流出した水に含まれる細粒分は一定距離移動した後に停止する。注水時に細粒分が井戸から到達し得る最大の距離をxとし、同様に揚水時に細粒分が井戸に引かれ得る最大の距離をyとすると、x>yであると、y〜xの範囲に細粒分に蓄積されてしまう。そこで本手段ではy>xとなるように注水流量及び揚水流量を調整するようにしている。そのためには、揚水時の負圧の絶対値が注水時の正圧の絶対値より大きくなるようにすればよい。具体的な操作の手順は、設計者が注水流量及び揚水流量の数値を仮に設定して入力した後、井戸周辺の水位分布の算定、水位分布からの動水勾配の算定、動水勾配からのSX及びSYの範囲の計算、SYがSXより広くなるように注水流量及び揚水流量の調節の各段階により行う。各段階の具体的な内容については後述するが、これら各各段階を制御部が全自動で計算するようにしてもよく、また各段階の計算結果をインターフェイスを通じて設計者に提示し、設計者の承認を得て次の段階に進むようにしてもよい。
【0011】
第4の手段は、
井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸を制御する方法であって、
予め注水流量と井戸内の水位上昇との関係を測定した注水試験の結果に応じて、設計注水流量に対する標準水位h1と、標準水位より高い管理水位h2及び標準水位よりも低い下方水位h3とを設定する行程と、
その設計注水流量で注水を行う行程と、
還水の通り道の目詰まりにより井戸内の水位が管理水位h2に達すると注水を停止して揚水を行う行程と、
揚水により井戸内水位が下方水位h3に達したときに揚水モードを注水モードに切り替える行程を含んでいる。
【0012】
本手段は、第1の手段のシステムに対応する方法であり、第1の手段に関して記載したことは本手段に援用する。注水時の井戸内の水位の上昇し易さは井戸の構造だけでなく、井戸周りの土壌の性質に左右されるため、現場ごとに注水試験を行い、設計注水流量及び標準水位を設定することが望ましい。揚水行程により標準水位より下方の水位まで揚水するため、揚水流量を大きくして逆洗浄の効果を大きくすることができる。各行程の切り替えは機械制御で自動的に行うことができるが、人の判断で切り替えるようにしてもよい。
【0013】
第5の手段は、第4の手段を有し、
前述の注水試験として、注水流量を段階的に変化させて井戸内の水位上昇量を測定する段階注水試験を行い、
還水の通り道の目詰まりにより水位上昇量が急増するときの注水流量を限界注水流量とし、
この限界注水流量より低く設計注水流量を設定するとともに、この設計注水流量を注水したときの井戸内の水位を標準水位としている。
【0014】
限界注水流量を超えると、水位の上昇が早くなるために水位を管理水位以下に管理するという面からは好ましくない。そこで本手段では、限界注水水位よりも下方に設計注水流量を設定するようにしている。
【0015】
第6の手段は、第4の手段又は第5の手段に記載したリチャージ井戸を制御する方法であって、
揚水により井戸内水位が下方水位h3に達したときに揚水モードを注水モードに切り替える行程の代わりに、井戸中の水位が管理水位を超えない範囲において、次の(1)又は(2)の所定の設計時間に亘る2種類の状態を繰り返した後に注水モードに切り替わるように構成している。
(1)揚水を停止する状態と揚水を開始する状態 (2)井戸内へ地下水が入る勢いよりも揚水流量を減じた状態と揚水流量を戻した状態。
【0016】
本手段は、揚水行程を繰り返す、リチャージ井戸の制御方法である。第2の手段に関して記載したことは本手段に援用する。
【0017】
第7の手段は、第4の手段から第6の手段のいずれかを有し、
標準水位の設定に先立つ予備の行程として、
井戸の状態に応じて設計注水流量Qinと揚水流量Qoutを仮設定し、
これらの設計注水流量及び揚水流量から井戸近傍の水位分布を算定し、
算出した水位分布から注水時の動水勾配を算定し、細粒分が移動し得る最小動水勾配を生ずる場所の、井戸からの距離をXとし、
算出した水位分布から揚水時の動水勾配を算定し、細粒分が移動し得る最小動水勾配を生ずる場所の、井戸からの距離をYとし、
Y≧X+α(但しαは任意に設定した定数)となるように設計注水流量Qinと揚水流量Qoutとを調整することを内容としている。
【0018】
本手段は、細粒分が拡散する範囲より細粒分を井戸に回収できる範囲が広くなるように設計する方法である。第3の手段のシステムに対応する方法であり、第3の手段に関して記載したことは本手段に援用する。水位分布hの算定は、後述のTheisの式(数式1、数式2)により行うことができる。更に動水勾配の算定は数式3により、流速の算定は数式4により行うことができる。
【0019】
第8の手段は、第7の手段を有し、かつ
水が距離yを移動する必要時間toutを算定して、1作業サイクル当りの累積揚水量と累積注水量との比〔(Qout×tout)/(Qin×tin)〕が定数β以下となるように設計注水流量Qinと揚水流量Qoutとを再調整することを内容としている。
【0020】
作業サイクルとは任意の作業時間の単位であり、本手段では、1作業サイクルの範囲(例えば一日)で累積揚水量と累積注水量との比が一定以下となるようにしている。これによりリチャージ井戸の全体の制御効率を高めることができる。
【発明の効果】
【0021】
第1、第4の発明によれば、逆洗浄の時期を時間で管理する方式に比べて井戸内の水位に応じて行うから井戸の目詰まりが進行する前に確実に逆洗浄することができる。
【0022】
第2、第6の発明によれば、繰り返し揚水を行うから、細粒分の除去率が低下することがなく、排水の無駄を防止することができる。
【0023】
第3、第7の発明によれば、注水時に細粒分が井戸から到達する範囲よりも、揚水時に細粒分が井戸側へ引き戻される範囲を広くしたから、細粒分が井戸の周辺に蓄積されることがない。
【0024】
第5の発明によれば、段階注水試験をしたから、限界注水流量を正確に把握することができ、注水流量及び標準水位を合理的に設計することができる。
【0025】
第8の発明によれば、1作業サイクルの範囲で累積揚水量と累積注水量との比が一定以下となるようにしたから、リチャージ井戸の全体の制御効率を高めることができる。
【発明を実施するための最良の形態】
【0026】
図1〜図6は、本発明のリチャージ井戸の制御システムの構成図を示している。
【0027】
同図中、Liは難透水層であり、Lpは帯水層であり、2は井戸である。井戸の囲壁下端部には、帯水層Lpに連通する通水部4が形成されている。
【0028】
この井戸の制御システム10は、注水管12と、揚水管14と、水位計である測位手段18と、制御部20とで構成されている。注水管12は井戸の途中まで延びており、揚水管14は井戸の下端部内まで延びている。揚水管14の下端部には揚水ポンプ16が付設されている。測位手段18は、後述の管理水位に相当する位置に設置されている。注水管12及び揚水管14にはそれぞれ電動弁22A、22Bを設けている。
【0029】
制御部20は、地上に設置されており、測位手段18、電動弁22A、22B、揚水ポンプ16、及び図示しない送水ポンプに接続している。そして、測位手段22の測定値に応じて、電動弁22、揚水ポンプ16、及び注水ポンプを作動させ、注水能力の経時的な低下を井戸内水位の上昇量で管理する機能を有している。制御部20は、演算処理手段と、演算に必要な数式などを記憶する記憶手段と、入出力手段とを備えていることが望ましい。入出力手段は、測位手段からの入力、電動弁や各ポンプへの出力の他、演算結果を数値やグラフとして表示する対人インターフェイスを備えているものとすることができる。
【0030】
なお、図2において、h0は、注水・揚水前の井戸の水位(自然水位)であり、h1は設計注水流量を注水したときの水位(標準水位)であり、h2は、当該数値以下に井戸の水面を管理すべき水位であり(管理水位)、h3は、揚水行程により井戸内の水面を下降させるべき目標値である。
【0031】
より詳しい機能の解説は、本発明の制御方法の説明と併せて行う。なお、この方法発明の第1の実施形態である水位による注水・揚水行程の制御(揚水行程の繰り返し制御を含む)、及び第2の実施形態である注水流量及び揚水流量の調整は、並行して行うことが望ましいが、説明の都合上、別々に扱うものとし、まず第1実施形態について説明する。
【0032】
第1段階として、システムの設計者は、制御部20を操作して、注水量を段階的に上昇させ、注水流量と水位を計測する段階注水試験を行う。図3は段階注水試験の測定結果を示すものであり、図4は実験結果を分析したものである。次に設計者は、この分析内容を利用して、限界注水流量を超えない範囲で標準水位dh1を設定する(但しdh1=h1−h0)。
【0033】
標準水位の算定に関しては、安全率を考慮して、限界注水量の80%や90%に対応した水位をh1と決めてもよく、また揚水量が限界注水量に対して余裕度が大きい場合は、揚水量と同じ注水量に対応した水位をh1と決めてもよい。これらの決定は、制御装置20からの問いに答える形で作業員が入力するようにしてもよく、また上記の決定方法を予め制御装置に記録しておいて自動演算するようにしてもよい。
【0034】
第2段階として、設計者は、dh1+γ(例γ=1.0m)の位置を管理水位と設定し、この場所に測位手段を設置する。
【0035】
第3段階として、制御部20は、井戸の目詰まりの進行に伴い、井戸内水位が管理水位まで上昇すると、注水管電動弁22Aをオフ、揚水ポンプのリレースイッチをオンとし、揚水管電動弁22Bの制御により揚水行程と行う。揚水行程は、繰り返し操作することが望ましい。これに関しては別に説明する。
【0036】
第4段階として、制御部20は、揚水行程終了後に、揚水ポンプリレースイッチをオフ、注水管電動弁をオンとし、通常の注水運転を開始する。
【0037】
上記各段階のうち第1、第2段階はいわば準備段階であり、第3、第4は制御部による自動管理の段階である。第3、第4段階以降の操作は図6のフローチャートに示されている。
【0038】
上記第3段階に関して、(1)制御部20は、繰り返し揚水のために弁を開放した後、設定した揚水時間(a分)まで揚水管電動弁の開度を100%に継続する。より正確には、図6の右半部に記載されているように、弁の開放に要する時間をdとすると、その間は弁の開度は0〜100%であり、次の(a−d)の間は弁の開度は100%である。
(2)次に制御部は、所定の揚水時間(a分)経過の後、揚水管電動弁を最小開度f%まで閉じて、設定した停止時間(b分)まで揚水した後、停止(又は減衰)する。より正確には、図6に記載されている通り、逆洗浄時間bから弁閉塞時間eを除いた時間の間、弁の開度を最小開度fに保つことになる。
【0039】
(3)そして制御部は、予め設定された繰り返し回数で(1)(2)を繰り返す。ここで、設計者は、図11に示すように、流量・水位・排砂量を計測する逆洗浄試験を行い、この試験から繰り返し揚水の揚水時間、停止時間、排砂効率の良い繰り返し回数を設定する。図示の例では、3回までと、4回以降とで排砂量に差があるので、繰り返し回数を3回と選ぶとよい。なお、流量、水位は、細粒分を引き戻せる範囲の算定結果から設定すればよく、また逆洗浄試験では、設定した流量、水位の条件下での水位低下時間、排砂量を計測すればよい。
【0040】
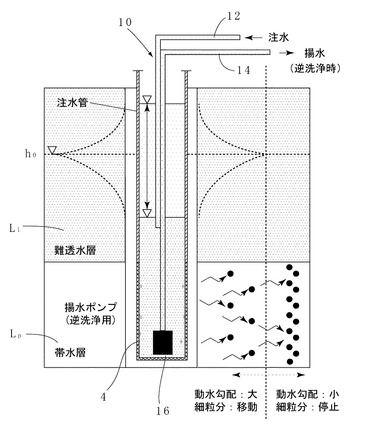
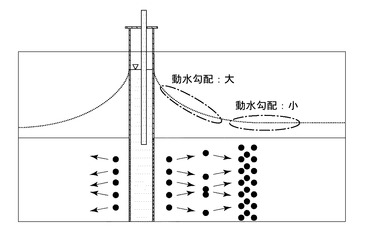
図7〜図12は、本発明の第2の実施形態を示している。図7は、揚水行程での井戸の周りの動水勾配線を示している。この勾配が大きい範囲Syでは細粒分を井戸側に引き戻すことができるが、勾配が小さい範囲S0では細粒分を井戸側へ引き戻すことができない。そこで本実施形態では、注水段階での細粒分の到達範囲SxはSyに比べて狭くとるようにしている。
(1)第1段階として、設計者は、段階注水試験から設計注水流量Qinを設定し、図11の逆洗浄試験から逆洗浄時の揚水流量Qoutを設計する。
(2)第2段階として、制御部20は、注水時のQinと揚水時の揚水流量Qoutとから、井戸近傍の水位分布を算定する。水位分布hの算定は、例えば次のTheisの式により行うことができる。制御部には、これらの式を予め入力しておき、設計者が注水流量Qin及び揚水流量Qoutを入力すると、水位分布を算出するようにするとよい。
【0041】
[数式1] dh=0.0796W(u)Q/kD
[数式2] u=r2S/4kDt
但しdh:井戸からr(m)の位置における水位変動量、Q:注水流量又は揚水流量(L/min)、k:透水係数(m/min)、D:帯水層厚(m)、S:貯留係数、t:揚水継続時間(min)、W(u):uの井戸係数
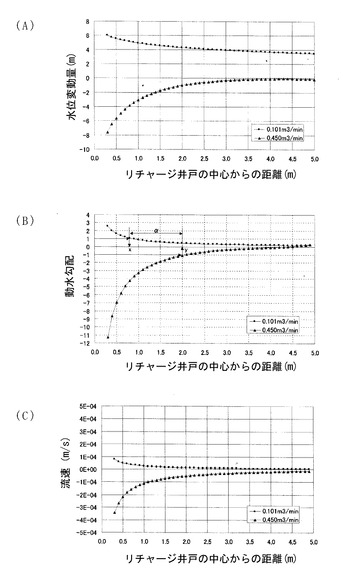
図10には、注水時の水位分布Lin及び揚水時の水位分布Loutがそれぞれ示されている。各水位分布は井戸から離れるにつれて帯水層Lpの上端面に漸近する曲線となる。この漸近線から各水位分布までの高低差は、注水流量及び揚水流量の大きさに依存する。揚水流量を注水流量より大きくすると、同図の如く揚水時の水位分布の絶対値が大きくなる。
(3)第3段階として、算定した水位分布から注水時の動水勾配iinを算出し、図10に示す如くこれが最小動水勾配icrとなる井戸からの距離xを算定する。最小動水勾配とは、細粒分が移動し始める勾配である。動水勾配は次の数式3で計算すればよい。例えば最小動水勾配を1とすると、iin=1のラインと注水時の水位分布Linとが交差する箇所と井戸との間の距離をxとすればよい。
【0042】
[数式3] iin=(dhi+1−dhi)/(ri+1−ri)
iin:区間iの動水勾配、hi:地点における水位低下量(m)、ri:井戸から地点iまでの距離
(4)第4段階として、第3段階と同様な方法で、揚水時の動水勾配ioutが最小動水勾配icrとなる井戸からの距離yを算定する。
(5)第5段階として、y≧x+αとなるように注水流量Qin及び揚水流量Qoutを調整する。具体的にはy<x+αであるときには揚水流量を一定値増やして(或いは注水流量を一定値減らして)、(2)から(4)の操作を行うということを、y≧x+αを満たすようになるまで繰り返せばよい(図8参照)。ここでαはアローアンスであり、例えばα=0.5mのように定める。目詰まりの進行は常に一定とは限らないのでアローアンスを含めて設計することが重要である。
(6)第6段階として、1日あたりの累積揚水量と累積注水量との比〔(Qout×tout)/(Qin×tin)〕が定数β以下となるように設計注水流量Qinと揚水流量Qoutとを再調整する。tinは注水時間であり、注水ポンプの作動時間を制御部20に記録しておいて、その数値を用いればよい。toutは細粒分が距離yを移動するのに要する時間であり、次の数式4により定めることができる。viは区間iでの流速であり、vi=k×iiで与えられる。kは透水係数(m/min)である。また、ri+1、riは井戸から地点i+1、地点iまでの距離である。
【0043】
[数式4] t=Σ1y((ri+1−ri)/vi
図12及び図13は、本実施形態の自動洗浄を行ったときの実験例である。システムの構成例は図1に示す通りであり、ポンプ動力電源はAC200V,注水量は0〜200(L/min)である。3回の繰り返し洗浄を行うことで井戸内の水位が自然水位に復帰することが確認され、十分な逆洗浄の効果が得られた。
【0044】
なお、上記の実施形態は好適な実施の1例に過ぎず、本発明の趣旨を逸脱しない範囲に限りにおいて、その例示した事柄に限定されるものではない。
【図面の簡単な説明】
【0045】
【図1】本発明の第1実施形態に係る井戸の制御装置及び制御方法の概念図である。
【図2】第1実施形態の作用を示す説明図である。
【図3】第1実施形態の段階注水試験の説明図である。
【図4】図4の試験結果の分析図である。
【図5】第1実施形態での水位の変化を示すもので、同図(A)は注水時の水位の変化を、同図(B)は洗浄時の井戸内水位の変化をそれぞれ表している。
【図6】第1実施形態の行程のフローチャートである。
【図7】本発明の第2実施形態に係る井戸の制御装置及び制御方法の概念図である。
【図8】第2実施形態の行程のフローチャートである。
【図9】第2実施形態に関して、同図(A)は水位分布の算定例を、同図(B)は動水勾配分布の算定例を、同図(C)は流速の算定例をそれぞれ示している。
【図10】第2実施形態の原理図である。
【図11】第2実施形態における逆洗浄試験の結果を示すものである。
【図12】第2実施形態の実験例である。
【図13】同例の実験結果を示している。
【図14】リチャージ井戸の目詰まりの現象の説明図である。
【符号の説明】
【0046】
2…井戸 4…通水部 10…制御システム 12…注水管 14…揚水管
16…揚水ポンプ 18…測位手段 20…制御部 22…電動弁
Li…難透水層 Lp…帯水層
【特許請求の範囲】
【請求項1】
井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸の制御システムであって、
井戸内への注水管12及び井戸内からの揚水管14と、
井戸内の水位を測るための測位手段18と、
目詰まりを生ずる前の設計注水流量に対する標準水位h1に応じて、標準水位よりも高い管理水位h2と標準水位よりも低い下方水位h3との間に井戸の水位を保つための制御部20とを具備し、
この制御部20は、注水行程で水位が管理水位h2に達すると注水モードから揚水モードに切り替え、揚水行程で水位が下方水位h3まで下がったときに揚水モードから注水行程に戻すように構成していることを特徴とする、リチャージ井戸の制御システム。
【請求項2】
請求項1に記載したリチャージ井戸の制御システムであって、
上記制御部20は、最初の揚水行程で水位が下方水位h3まで下がったときに、
直ちに注水モードに切り替わる代わりに、井戸中の水位が管理水位を超えない範囲で次の(1)又は(2)の2種類の状態を繰り返した後に注水モードに切り替わるように構成したことを特徴とする、リチャージ井戸の制御システム。
(1)揚水を停止する状態と揚水を開始する状態
(2)井戸内へ地下水が入る勢いよりも揚水流量を減じた状態と揚水流量を元に戻した状態
【請求項3】
制御部20は、目詰まりの原因である細粒分の回収率を高めるために、注水時に細粒分が井戸の外壁から出て周辺地盤中の動水勾配の低減により停止するまでの領域SXよりも、揚水時に周辺地盤から井戸へ向かう動水勾配により土中の細粒分が移動する領域SYが広範囲となるように注水流量と揚水流量とを調節したことを特徴とする、請求項1又は請求項2記載のリチャージ井戸の制御システム。
【請求項4】
井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸を制御する方法であって、
予め注水流量と井戸内の水位上昇との関係を測定した注水試験の結果に応じて、設計注水流量に対する標準水位h1と、標準水位より高い管理水位h2及び標準水位よりも低い下方水位h3とを設定する行程と、
その設計注水流量で注水を行う行程と、
還水の通り道の目詰まりにより井戸内の水位が管理水位h2に達すると注水を停止して揚水を行う行程と、
揚水により井戸内水位が下方水位h3に達したときに揚水モードを注水モードに切り替える行程を含む、リチャージ井戸を制御する方法。
【請求項5】
前述の注水試験として、注水流量を段階的に変化させて井戸内の水位上昇量を測定する段階注水試験を行い、
還水の通り道の目詰まりにより水位上昇量が急増するときの注水流量を限界注水流量とし、
この限界注水流量より低く設計注水流量を設定するとともに、この設計注水流量を注水したときの井戸内の水位を標準水位としたことを特徴とする、
請求項4に記載のリチャージ井戸を制御する方法。
【請求項6】
請求項4又は請求項5に記載したリチャージ井戸を制御する方法であって、
揚水により井戸内水位が下方水位h3に達したときに揚水モードを注水モードに切り替える行程の代わりに、井戸中の水位が管理水位を超えない範囲において、次の(1)又は(2)の所定の設計時間に亘る2種類の状態を繰り返した後に注水モードに切り替わるように構成したことを特徴とする、リチャージ井戸を制御する方法。
(1)揚水を停止する状態と揚水を開始する状態
(2)井戸内へ地下水が入る勢いよりも揚水流量を減じた状態と揚水流量を戻した状態。
【請求項7】
標準水位の設定に先立つ予備の行程として、
井戸の状態に応じて設計注水流量Qinと揚水流量Qoutを仮設定し、
これらの設計注水流量及び揚水流量から井戸近傍の水位分布を算定し、
算出した水位分布から注水時の動水勾配を算定し、細粒分が移動し得る最小動水勾配を生ずる場所の、井戸からの距離をXとし、
算出した水位分布から揚水時の動水勾配を算定し、細粒分が移動し得る最小動水勾配を生ずる場所の、井戸からの距離をYとし、
Y≧X+α(但しαは任意に設定した定数)となるように設計注水流量Qinと揚水流量Qoutとを調整することを内容とする、請求項4から請求項6の何れかに記載のリチャージ井戸を制御する方法。
【請求項8】
水が距離yを移動する必要時間toutを算定して、1作業サイクル当りの累積揚水量と累積注水量との比〔(Qout×tout)/(Qin×tin)〕が定数β以下となるように設計注水流量Qinと揚水流量Qoutとを再調整することを内容とする、請求項7に記載のリチャージ井戸を制御する方法。
【請求項1】
井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸の制御システムであって、
井戸内への注水管12及び井戸内からの揚水管14と、
井戸内の水位を測るための測位手段18と、
目詰まりを生ずる前の設計注水流量に対する標準水位h1に応じて、標準水位よりも高い管理水位h2と標準水位よりも低い下方水位h3との間に井戸の水位を保つための制御部20とを具備し、
この制御部20は、注水行程で水位が管理水位h2に達すると注水モードから揚水モードに切り替え、揚水行程で水位が下方水位h3まで下がったときに揚水モードから注水行程に戻すように構成していることを特徴とする、リチャージ井戸の制御システム。
【請求項2】
請求項1に記載したリチャージ井戸の制御システムであって、
上記制御部20は、最初の揚水行程で水位が下方水位h3まで下がったときに、
直ちに注水モードに切り替わる代わりに、井戸中の水位が管理水位を超えない範囲で次の(1)又は(2)の2種類の状態を繰り返した後に注水モードに切り替わるように構成したことを特徴とする、リチャージ井戸の制御システム。
(1)揚水を停止する状態と揚水を開始する状態
(2)井戸内へ地下水が入る勢いよりも揚水流量を減じた状態と揚水流量を元に戻した状態
【請求項3】
制御部20は、目詰まりの原因である細粒分の回収率を高めるために、注水時に細粒分が井戸の外壁から出て周辺地盤中の動水勾配の低減により停止するまでの領域SXよりも、揚水時に周辺地盤から井戸へ向かう動水勾配により土中の細粒分が移動する領域SYが広範囲となるように注水流量と揚水流量とを調節したことを特徴とする、請求項1又は請求項2記載のリチャージ井戸の制御システム。
【請求項4】
井戸内へ注水して地中へ還水するとともに、還水の通り道の目詰まり防止のために逆洗浄を行うように構成されたリチャージ井戸を制御する方法であって、
予め注水流量と井戸内の水位上昇との関係を測定した注水試験の結果に応じて、設計注水流量に対する標準水位h1と、標準水位より高い管理水位h2及び標準水位よりも低い下方水位h3とを設定する行程と、
その設計注水流量で注水を行う行程と、
還水の通り道の目詰まりにより井戸内の水位が管理水位h2に達すると注水を停止して揚水を行う行程と、
揚水により井戸内水位が下方水位h3に達したときに揚水モードを注水モードに切り替える行程を含む、リチャージ井戸を制御する方法。
【請求項5】
前述の注水試験として、注水流量を段階的に変化させて井戸内の水位上昇量を測定する段階注水試験を行い、
還水の通り道の目詰まりにより水位上昇量が急増するときの注水流量を限界注水流量とし、
この限界注水流量より低く設計注水流量を設定するとともに、この設計注水流量を注水したときの井戸内の水位を標準水位としたことを特徴とする、
請求項4に記載のリチャージ井戸を制御する方法。
【請求項6】
請求項4又は請求項5に記載したリチャージ井戸を制御する方法であって、
揚水により井戸内水位が下方水位h3に達したときに揚水モードを注水モードに切り替える行程の代わりに、井戸中の水位が管理水位を超えない範囲において、次の(1)又は(2)の所定の設計時間に亘る2種類の状態を繰り返した後に注水モードに切り替わるように構成したことを特徴とする、リチャージ井戸を制御する方法。
(1)揚水を停止する状態と揚水を開始する状態
(2)井戸内へ地下水が入る勢いよりも揚水流量を減じた状態と揚水流量を戻した状態。
【請求項7】
標準水位の設定に先立つ予備の行程として、
井戸の状態に応じて設計注水流量Qinと揚水流量Qoutを仮設定し、
これらの設計注水流量及び揚水流量から井戸近傍の水位分布を算定し、
算出した水位分布から注水時の動水勾配を算定し、細粒分が移動し得る最小動水勾配を生ずる場所の、井戸からの距離をXとし、
算出した水位分布から揚水時の動水勾配を算定し、細粒分が移動し得る最小動水勾配を生ずる場所の、井戸からの距離をYとし、
Y≧X+α(但しαは任意に設定した定数)となるように設計注水流量Qinと揚水流量Qoutとを調整することを内容とする、請求項4から請求項6の何れかに記載のリチャージ井戸を制御する方法。
【請求項8】
水が距離yを移動する必要時間toutを算定して、1作業サイクル当りの累積揚水量と累積注水量との比〔(Qout×tout)/(Qin×tin)〕が定数β以下となるように設計注水流量Qinと揚水流量Qoutとを再調整することを内容とする、請求項7に記載のリチャージ井戸を制御する方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−7858(P2009−7858A)
【公開日】平成21年1月15日(2009.1.15)
【国際特許分類】
【出願番号】特願2007−171007(P2007−171007)
【出願日】平成19年6月28日(2007.6.28)
【出願人】(000003621)株式会社竹中工務店 (1,669)
【Fターム(参考)】
【公開日】平成21年1月15日(2009.1.15)
【国際特許分類】
【出願日】平成19年6月28日(2007.6.28)
【出願人】(000003621)株式会社竹中工務店 (1,669)
【Fターム(参考)】
[ Back to top ]