
リニアモータの制御判断方法および制御装置
【課題】可動子を曲線状にも移動させるリニアモータにおける、制御可能性を判断する。
【課題手段】可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサの読みを用いて、(1)第1の信号の2乗と第2の信号の2乗との和を算出し、(2)2乗和が所定の値以上にあるとき、リニアモータが制御可能であると判断して、リニアモータの制御を行う。
【課題手段】可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサの読みを用いて、(1)第1の信号の2乗と第2の信号の2乗との和を算出し、(2)2乗和が所定の値以上にあるとき、リニアモータが制御可能であると判断して、リニアモータの制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、リニアモータに関する。
本発明は特に、曲線状の部分を含む固定子に対しても可動子を移動可能とするリニアモータに関する。
特定的には、本発明は、曲線状の部分を含む固定子に対しても可動子を移動させるリニアモータの制御判断方法および制御装置に関する。
【背景技術】
【0002】
リニアモータは、通常、直線状に形成された固定子に対して可動子が直線的に移動可能に構成されている。
【0003】
マグネット可動型リニアモータは、固定子と可動子とを有する。たとえば、特許文献1に記載のとおり、固定子は、たとえば、120度づつ位相がずれた電流が印加される複数の電磁コイルの組を長手方向に複数配設して形成されており、可動子は、固定子に対向する位置に移動可能に配設され、異なる磁極(N極とS極)の永久磁石(マグネット)を交互に少なくとも1組配設して構成されている。
その動作は、複数の電磁コイルに、たとえば、120度づつ位相がずれた電流を印加することにより、複数の電磁コイルに発生する120度づつ位相が異なる交番磁力によって可動子が固定子に対して移動させられる。
【0004】
電磁コイルに印加する電流の位相を、順方向または逆方向に変化させることにより、可動子を固定子に対して往復移動させることもできる。
マグネット可動型リニアモータには、固定子に対する可動子の位置を検出する位置検出センサが設けられ、位置検出センサの検出結果をもとに、固定子に対する可動子の位置を制御し、さらに、可動子が所定の固定子の可動範囲を逸脱しないように制御する。
【0005】
他方、マグネット可動型リニアモータとは逆に、可動子に複数組の電磁コイルを配設し、固定子に複数組の永久磁石を長手方向に配設した、電磁コイル可動型リニアモータも知られている。
電磁コイル可動型リニアモータにおいては、可動子として電磁コイルが移動する。電磁コイル可動型リニアモータにおいても、制御装置と位置検出センサを設けて、制御装置で位置検出センサの検出結果をもとに、可動子の位置を制御し、さらに、可動子が所定の固定子の可動範囲を逸脱しないように制御する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2815655号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
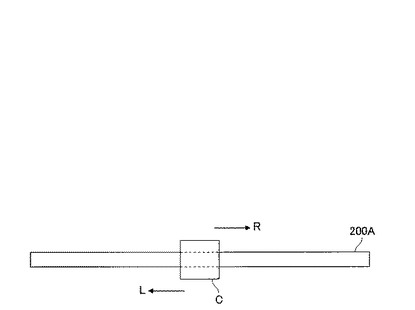
リニアモータとは、たとえば、図1に図解のごとく、可動子を備えた搬送体Cが、直線状の固定子200Aに対して直線状(リニア)に移動するモータである。
このリニアモータの利点を活用して、可動子を直線状に移動させるだけでなく、曲線状にも移動させたいという要望がでている。
【0008】
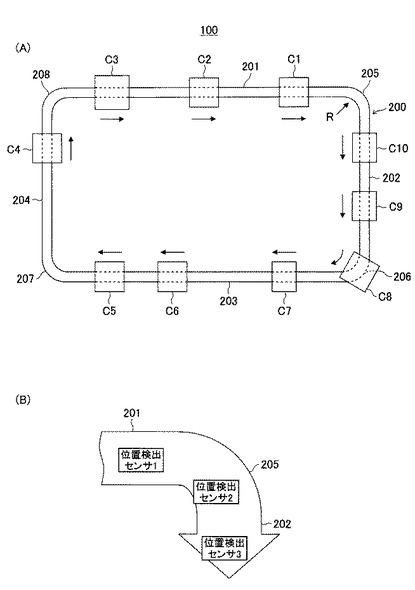
図2(A)を参照してその用途の1例を述べる。
図2(A)は、リニアモータを搬送装置に適用した例を示す。
図2(A)に図解のリニアモータ装置100は、それぞれが直線状に構成された直線状固定子201、202、203、204を矩形状に配置し、隣接する直線状固定子をそれぞれ曲率Rの曲線状固定子205、206、207、208で結合した巡回状の固定子200を有する。固定子には電磁コイルが配設されている。
搬送装置に適用したリニアモータ装置100において、巡回状の固定子200を、それぞれが可動子によって搬送される複数の搬送体C1〜C10が巡回して移動可能に配設されている。各可動子にはマグネット(永久磁石)が固定されている。
各搬送体Cに1個の可動子が装着されており、その可動子が固定子に対して移動することにより、搬送体Cが固定子に対して移動する。搬送体C1〜C10にはそれぞれワークが搭載されており、巡回状の固定子200の所定の位置において、ワークに対して所定の処理が行われる。
【0009】
図2(A)に図解したリニアモータ装置100において、直線状固定子201、202、203、204の部分を、搬送体C1〜C10の可動子が移動することには、問題がない。しかしながら、たとえば、曲線状固定子205の部分を、搬送体C1〜C10(以下、代表して搬送体C)の可動子が移動する場合には問題が起こる場合がある。
【0010】
図2(B)に、図2(A)に図解した、たとえば、曲線状の固定子205と、その両側に位置する直線状固定子201、202の拡大図を示す。
図2(B)の図解のように、搬送体Cを移動させる可動子(図示なし)が移動する軌跡に沿って、曲線状固定子205およびその両側の直線状固定子201、202に、複数組の電磁コイルと各組の電磁コイルに(図示なし)隣接して配設し、可動子の位置検出のために複数の位置検出センサを配設している。
【0011】
各位置検出センサは、1対のマグネット(N極、S極のマグネット)に対して、90度位相が異なる2つの検出値、すなわち、A相検出値、B相検出値を出力する。
位置検出センサは可動子の位置を検出するために使用するが、90度位相が異なるA相検出値、B相検出値を出力して、可動子の進行方向を検出可能としている。たとえば、A相検出値がB相検出値より早く検出値を示す場合は、可動子は右側に移動しており、逆に、B相検出値がA相検出値より早く検出値を示す場合は、可動子は左側に移動していることを示している。
【0012】
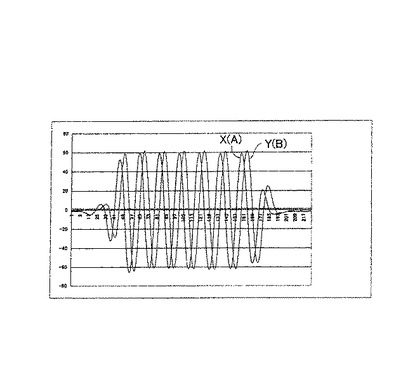
このような電磁コイル可動型リニアモータを制御する、制御装置で複数の位置検出センサで検出した検出値を読み取った結果を図3に示す。横軸は位置を示し、縦軸は位置検出センサの検出値の振幅を示している。
図3に図解の例は、A相の検出値(Xデータ)が、B相の検出値(Yデータ)より先に検出されている。
【0013】
図3を参照すると、可動子が位置検出センサの上にさしかかった直後、および、可動子が位置検出センサから離れる際に、位置検出センサの振幅が小さい。さらに、位相差が90度に保持されるべきA相検出信号とB相検出信号との位相差が90度でなくなっている。
また、図3を参照すると、曲線状固定子の部分では、可動子が位置検出センサ上を移動している場合でも、A相検出信号とB相検出信号との振幅が一定していない。
【0014】
このような現象が発生する理由は、たとえば、下記に起因する。
リニアモータ装置100には、種々の搬送体C1〜C10がそれぞれ可動子によって搬送される。種々の搬送体C1〜C10は寸法および/または重量が異なる。
同じ搬送体Cでも、搭載されるワークの有無によっても重量が変化する。
可動子と固定子との離間距離が変化することがある。
搬送体Cが安定した速度で搬送されている場合と、一端停止して再始動され加速がかかる場合とがある。
上記例示した条件の相違に起因して、たとえば曲線状の固定子205、もしくは、曲線状の固定子206、207、208の部分で、位置検出センサの検出信号が正常な値を示さなくなることがある。このような状態に陥ると、制御装置は、搬送体Cを正確かつ安定に搬送することが困難となる。
このように、本願発明の発明者は、上述した位置検出センサの検出値をそのまま用いると、可動子を曲線状固定子の部分を安定して移動させることが難しいという問題を見いだした。
【0015】
本発明は、可動子を直線状固定子だけでなく曲線状固定子部分にも移動させるリニアモータの制御判断方法および制御装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
本願発明の発明者は、可動子を曲線状固定子の部分にも移動させるリニアモータ装置について、特に、曲線状固定子の部分について、位置検出センサのA相検出信号の2乗と、A相検出信号と90度位相差があるB相検出信号の2乗との和を判断することにより、リニアモータ装置の可動子が正常に制御可能か否かを判断できることを見いだした。
本願発明は係る知見に基づく。
【0017】
本発明によれば、固定子と、当該固定子に対向して配設され、前記固定子に対して移動可能な可動子と、当該可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサと、を有するリニアモータの制御判断方法であって、
前記第1の信号の2乗と前記第2の信号の2乗との和を算出し、
前記2乗和が所定の値以上にあるとき、前記リニアモータが制御可能であると判断する
リニアモータの制御判断方法が提供される。
【0018】
また本発明によれば、固定子と、当該固定子に対向して配設され、前記固定子に対して移動可能な可動子と、当該可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサと、を有するリニアモータを制御する制御装置であって、
前記第1の信号の2乗と前記第2の信号の2乗との和を算出する手段と、
前記2乗和が所定の値以上にあるとき、前記リニアモータが制御可能であると判断する、判断手段と
を有する、リニアモータの制御装置が提供される。
【0019】
上記リニアモータに使用するリニアモータとしては、マグネット可動型リニアモータまたは電磁コイル可動型リニアモータのいずれでもよい。
【発明の効果】
【0020】
本発明によれば、可動子を曲線状固定子の部分にも移動可能とするリニアモータの種々の状態または条件について、制御可能か否かを判断することができる。
【図面の簡単な説明】
【0021】
【図1】図1は可動子が直線状の固定子に対して移動させる場合を示す図である。
【図2】図2(A)は直線状固定子と曲線状固定子とで矩形に構成された巡回形の固定子と、この巡回形の固定子の上を移動して搬送体C1〜C10を移動させる可動子を示す図であり、図2(B)は、図2(A)における曲線状固定子の部分を拡大した図である。
【図3】図3は、図2(B)に図解した曲線状固定子の部分を可動子が移動したときの位置検出センサの検出値の例を示す図である。
【図4】図4は可動子が直線状固定子の部分移動する場合の、リニアモータの構成を示す図であり、図4(A)は平面図、図4(B)〜(D)は断面電磁コイルである。
【図5】図5は図4における位置検出センサと可動子に配設されたマグネットとの位置関係と位置検出を示す図である。
【図6】図6は、図4に図解したリニアモータにおける位置検出センサの検出信号の波形を示す図である。
【図7】図7は、位置検出センサPS、電磁コイルなどの配置が不適切な場合の位置検出センサのA相検出信号の2乗とB相検出信号の2乗との和(2乗和)を時系列にプロットした図である。
【図8】図8は、可動子が移動した時の位置検出センサのA相検出信号の2乗とB相検出信号の2乗との和(2乗和)を時系列にプロットした図である。
【図9】図9は、図4に図解したサーボアンプ群における制御条件を判断する処理を示すフローチャートである。
【図10】図10は本発明の他の実施の形態として、リニアモータを用いた他の搬送装置の概略構成を示す図である。
【発明を実施するための形態】
【0022】
本発明のリニアモータの制御判断方法および制御装置の実施の形態について述べる。
【0023】
第1実施の形態
本発明のリニアモータの第1の実施の形態として、マグネット可動型リニアモータを搬送装置に適用した例を例示する。
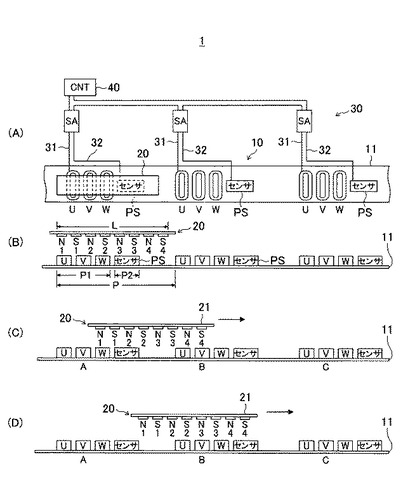
図4は、本発明の実施の形態としてマグネット可動型リニアモータを用いた搬送装置における、可動子が固定子に対して直線状に移動する部分の構造を図解した図である。
図4(A)は平面図を示し、図4(B)〜(D)は断面図を示す。
【0024】
図4において、搬送装置に適用したマグネット可動型リニアモータ1は、固定子10と、固定子10に対向して位置し固定子10に対して移動可能な可動子20と、サーボアンプ群30とを有する。
図4に図解したマグネット可動型リニアモータ1は、複数のサーボアンプ(SA)を用いて、1個または複数の可動子20の移動位置を制御して可動子20を固定子10に対して移動させる構成のリニアモータである。
このマグネット可動型リニアモータ1を制御するため、マグネット可動型リニアモータ1の他に制御装置40が設けられている。
なお、サーボアンプ群30を、マグネット可動型リニアモータ1に含めるか、制御装置40と同様、マグネット可動型リニアモータ1には含めないことにすることもできる。
【0025】
固定子10は固定部11を有する。
固定部11には、隣接して配設された複数、この例示では、3個の電磁コイル組が配設されている。各電磁コイル組は、U相電磁コイル、V相電磁コイル、W相電磁コイルを1組として構成されている。各電磁コイル組(グループ)が、所定ピッチPずつ隔てて複数組、固定部11の長手方向に配設されている。
各組の3個のU相電磁コイル、V相電磁コイル、W相電磁コイルには、サーボアンプ群30の対応するサーボアンプから動力線31を介して、それぞれ、120度位相がずれた交流電流が印加される。
固定部11には、可動子20の位置を検出するため、各電磁コイル組に隣接して位置検出センサPSがそれぞれ配設されている。
【0026】
固定子10に対して相対的に移動する可動子20は、支持部21を有する。支持部21にはワークが搭載される。本実施の形態において、可動子20と支持部21とを総称して搬送体Cと呼ぶ。
支持部21には、固定子10の電磁コイル組に対向する側にN極を示すN極マグネットと、電磁コイル組に対向する側に固定子10に対してS極を示すS極マグネットとが隣接して配設され、これらN極、S極マグネットを1対とした、マグネットの対が複数組、図解の実施の形態では4組、隣接して配設されている。
図4に図解の例示においては、1対のマグネットとして、たとえば、N1とS1、N2とS2として、図解したが、磁極の異なる隣接するマグネットとしては、上述した対の関係に限らず、たとえば、S1とN2、N2とS3との関係のように、異なる磁極のマグネットが隣接している関係をも意味する。
【0027】
サーボアンプ群30の各サーボアンプ(SA)から、動力線31を介して対応する電磁コイル組のU相電磁コイル、V相電磁コイル、W相電磁コイルに、それぞれ、120度位相がずれた交流電流が印加される。これにより、1サイクル、360度について、120度位相がずれた磁力がこの電磁コイル、U相電磁コイル、V相電磁コイル、W相電磁コイルから発生されて、近接した位置にある可動子20のマグネットに作用して、可動子20を移動させる。
【0028】
サーボアンプ群30の各サーボアンプ(SA)に接続されたセンサ線32を介して対応する位置検出センサPSからの検出信号がサーボアンプ(SA)を介して制御装置40に入力される。
【0029】
U相電磁コイル、V相電磁コイル、W相電磁コイルを1組とする電磁コイル組Aと、近接して配設されたU相電磁コイル、V相電磁コイル、W相電磁コイルを1組とする電磁コイル組BとはピッチPだけ離間して配設されている。他の近接する電磁コイル組との配置関係も同様である。
このピッチPの間に、3個の電磁コイル、すなわち、U相電磁コイル、V相電磁コイル、W相電磁コイルが近接して配置されている。3個の電磁コイルの幅は、ピッチP1である。
各電磁コイル組内のW相電磁コイルに隣接して、それぞれ、位置検出センサPSが配設されている。位置検出センサPSの幅はピッチP2である。
【0030】
マグネットと電磁コイルとの関係は、基本的には、1個の電磁コイルで1個のマグネットを移動可能とする。
好ましくは、2対のマグネット、すなわち、4個のマグネット、たとえば、N1:S1,N2:S2(なお、S1:N2,S2:N3でもよい)の配設幅が、3個の隣接して配設された電磁コイルの配設幅であるピッチP1に等しい(マグネット4に対して電磁コイル3の配設関係、4:3)。
また好ましくは、1対のマグネット(N:S)の配設幅が位置検出センサPSの幅であるピッチP2に等しい。
好ましくは、3対のマグネット、たとえば、N1:S1,N2:S2,N3:S3のマグネットの配設幅が、3個の電磁コイルの配設幅であるピッチP1と、位置検出センサPSの幅であるピッチP2との和、(P1+P2)にほぼ等しい。
なお、好ましくは、4対のマグネット、たとえば、N1:S1,N2:S2,N3:S3,N4:S4のマグネット対の配設幅(配設長さ)Lは、(P1+P2)より長い。
また、3対のマグネットの配設幅と上記ピッチP1ピッチP2の和にほぼ等しければ、U相電磁コイル、V相電磁コイル、W相電磁コイルを1組とする近接する電磁コイル組は上記の如く離間させるだけでなく、近接させてもよい。
【0031】
複数対、たとえば、4対のマグネット、たとえば、N1:S1,N2:S2,N3:S3,N4:S4のマグネット対の配設幅(配設長さ)Lが、図4(B)〜(D)に図解のように、4対のマグネットのいずれか1対、または、近接する異なる磁極のマグネット、たとえば、S3:N4のマグネット対が位置検出センサPSの上に位置するように、マグネット対の数が規定されている。なお、本実施の形態では、マグネット対の数は、4対である。このことは、可動子20がいずれの位置においても、位置検出センサPSによって搬送体Cの位置を検出可能な条件である。
【0032】
可動子20が電磁コイルの交番磁力に応じて移動可能であるためには、下記の条件が満足されることが好ましい。
(a)図4(B)に図解したように、4個、2対のマグネットが電磁コイル組Aの3個の電磁コイルの電磁力の影響を受けるか、
(b)図4(D)に図解のごとく、4個、2対のマグネットが電磁コイル組Bの3個の電磁コイルの電磁力の影響を受けるように、
マグネットの個数を設ける。
【0033】
好ましくは、可動子20の移動を円滑にするため、可動子20の位置に依存せずに電磁コイルから同じ電磁力を受けるためには、3個の電磁コイルの電磁力の作用を、常に所定個数、たとえば、本実施の形態では、4個のマグネットが受けるように構成することもできる。
たとえば、同じ電磁コイル組内の3個の電磁コイル、または、隣接する2つの電磁コイル組の隣接する3個の電磁コイル、たとえば、電磁コイル組AのW相電磁コイルと電磁コイル組BのU相電磁コイルとV相電磁コイルとの3個の電磁コイルの電磁力の作用を、4個のマグネットが受ける、または、電磁コイル組AのV相電磁コイルとW相電磁コイルと、電磁コイル組BのU相電磁コイルとの3個の電磁コイルの電磁力の作用を、4個のマグネットが受けるように構成されていることが望ましい。
この場合、可動子20の支持部21には、たとえば、10個のマグネット、すなわち、5対のマグネットを設ける。
【0034】
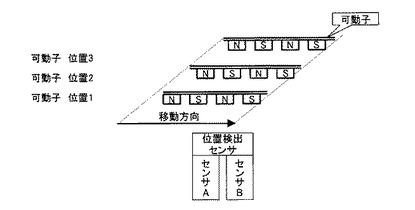
図5は、位置検出センサPSと、可動子20の支持部21に配設されたマグネットとの位置関係を示す。
図5は、概念的に、可動子20が移動していく場合に、それぞれ、ある1つの位置検出センサPSがその位置を検出する状態を示している。
各位置検出センサPSは、A相検出信号を生成する第1のセンサAと、B相検出信号を生成する第2のセンサBとを有する。第1のセンサAと第2のセンサBとは、90度位相差のある位置検出信号を生成するように、隣接するマグネットとのピッチを考慮して、たとえば、離間して配置されている。
第1のセンサAと第2のセンサBは、たとえば、ホール(Hole)効果に基づくセンサであり、マグネットの磁界に応じた検出信号を出力する。
【0035】
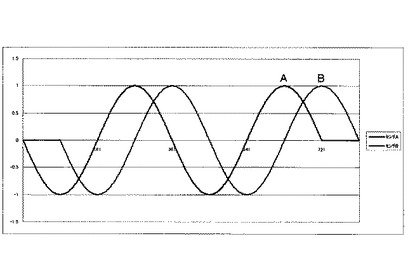
図6は、図4に図解したマグネット可動型リニアモータ1における、可動子20が移動した場合の複数の位置検出センサPSの検出信号、すなわち、A相検出信号とB相検出信号とを示すグラフである。横軸は位置を示し、縦軸は振幅を示す。
位置検出センサPS内の第1のセンサAと第2のセンサBは、それぞれ、マグネットの磁界に応じた振幅(電圧)の信号を出力する。たとえば、マグネットが位置検出センサPSに接近すれば、大きな振幅の信号、マグネットが位置検出センサPSから離れると小さな振幅の信号を出力する。
ワークを搭載可能な搬送体Cを構成する可動子20は所定のスピードで固定子10の上を移動するので、第1のセンサAおよび第2のセンサBの検出信号、すなわち、A相検出信号およびB相検出信号は、正弦波状(または余弦波状)となる。
【0036】
図6に図解したA相検出信号およびB相検出信号は、可動子20が直線状の固定子10に対して移動する場合なので、位相差が90度に維持されており、それぞれの振幅も一定に安定している。
【0037】
可動子20が位置検出センサPSの上を移動すると、たとえば、図6に図解した、正弦波のA相検出信号およびB相検出信号が得られる。
可動子20の位置をXとすると、下記の関係が得られる。
【0038】
X=tan-1(B/A) …(1)
ただし、AはA相検出信号であり、
BはB相検出信号である。
【0039】
このとき、位置検出センサのA相検出信号AとB相検出信号Bとの2乗の和は一定値Cとなる。
【0040】
A2 +B2 =C …(2)
【0041】
このような状態において、サーボアンプ(SA)が、後述するように、搬送体Cが制御可能か否かを判断し、制御装置40は、サーボアンプSAを介して入力される位置検出センサPSからの複数の位置データに基づいて、搬送体Cを構成する可動子20の位置を検出して、位置制御を行う。
たとえば、制御装置40は、位置検出センサPSからの位置検出値、すなわち、A相検出信号およびB相検出信号に基づいて、搬送体Cを構成する可動子20の移動量、および/または、可動子20を移動させる速度に応じて、サーボアンプSAを介して対応する各電磁コイルに印加する電流の値を決定する。
対応するサーボアンプSAは、駆動電流を対応する電磁コイルに印加する。
【0042】
以上、図4を参照して、搬送体Cを構成する可動子20が、直線状固定子10を移動する場合を述べたが、本実施の形態においては、図2(A)、(B)に図解したように、直線状固定子201、曲線状固定子205、直線状固定子202、曲線状固定子206、固定子203、曲線状固定子207、直線状固定子204、曲線状固定子208、直線状固定子201と巡回状の固定子200に対して移動する。
この固定子200にも、固定子10と同様、電磁コイル組と位置検出センサPSとが所定ピッチPで配設されている。
制御装置40の制御のもとで、図4に図解した搬送体Cを構成する可動子20が、この固定子200の上を移動していく。したがって、各搬送体Cを構成する各可動子20は固定子200の上を巡回することも可能である。
【0043】
可動子20が、直線状固定子201、202、203、204の上を移動するときは、複数の位置検出センサPSによって可動子20の位置および移動方向(向き)を正確に検出することができる。
他方、可動子20が曲線状固定子205、206、207、208の上を移動するときは、図4(B)を参照して上述したように、位置検出センサPSとマグネットとの接近と離間関係に応じた振幅の低下、A相検出信号とB相検出信号と位相差の変化、さらに、A相検出信号とB相検出信号の不安定が起こる場合がある。
【0044】
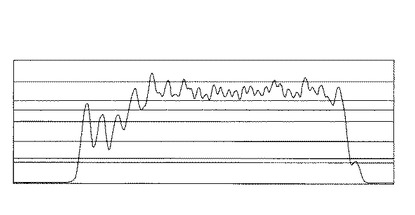
その不安定さの1つとして、曲線状固定子の部分の位置検出センサPSの範囲と、電磁コイルの配置が不適切な場合、可動子20の移動の不安定さが起こる。このような場合、位置検出センサPSのA相検出信号AとB相検出信号Bについて、式(2)に従って演算した結果(A2 +B2 )が、図7に例示したように、一定にならないことが起こることが判った。
図7において、横軸は時間経過、すなわち、可動子20の移動を示し、縦軸は(A2 +B2 )を示す。
2乗和(A2 +B2 )は、サーボアンプ群30において演算した。
このような結果が得られた場合には、リニアモータ装置100の設計変更が必要なことが判る。換言すれば、2乗和(A2 +B2 )によって、可動子20の移動の安定さを自動的に判断することができる。
【0045】
その他の不安定さとしては、たとえば、上述したように、(a)リニアモータ装置100には、種々の搬送体C1〜C10がそれぞれ可動子によって搬送されるが、種々の搬送体C1〜C10は寸法および/または重量が異なる、(b)同じ搬送体Cでも、搭載されるワークの有無によっても重量が変化して動作条件が変化する、(c)可動子と固定子との距離の変化、(d)搬送体Cが安定した速度で搬送されている場合と、一旦停止して再始動され加速がかかる場合とがあるなどによる。
したがって、たとえば、同じ搬送体Cでも、ワークが搭載されているか否か、移動速度が速いか遅いかなどにより、安定な移動が可能であったり、不安定な移動になることが起こる。
【0046】
図8は、可動子20が直線状固定子201と隣接する曲線状固定子208、205の部分を移動した場合の、式(2)で規定した(A2 +B2 )の値を曲線CVで示すグラフである。
図8において、横軸は時間経過、すなわち、可動子20の移動を示し、縦軸は(A2 +B2 )を示す。
本実施の形態においては、2乗和(A2 +B2 )は、サーボアンプ群30において演算した。
【0047】
(A2 +B2 )が一定またはほぼ一定の場合、式(1)が成立して、制御装置40において、固定子200に対する可動子20の位置を特定することができる。
しかしながら、(A2 +B2 )が大きく変動したり、(A2 +B2 )の値が大きすぎたり、低すぎると、式(1)が成立せず、サーボアンプSAにおいて、可動子20の位置を特定することが困難となる。
【0048】
図8において、(A2 +B2 )の値が下限値LLより小さい場合、たとえば、センサ線32の断線により、信号が得られないと仮定する。この状態では、たとえば、制御装置40は可動子20の移動制御を行わない。
(A2 +B2 )の値が下限値LLを越え、制御開始点レベルCLを越えた時点t1からサーボアンプSAまたは制御装置40が、可動子20の移動制御を開始する。
サーボアンプSAまたは制御装置40は、位置検出センサPSのA相検出信号AまたはB相検出信号Bが制御開始点レベルCLを超えた時間を計数しており、線CTRはその計数値(カウント値)、すなわち、可動子20の位置を示す。
サーボアンプSAまたは制御装置40は、カウント値CTRが所定の値に到達した時点t2で可動子20の移動制御を停止する。
時点t1〜t2の期間T、すなわち、(A2 +B2 )の値が所定の範囲内にある期間Tにおいて、制御装置40は、位置検出センサPSの読みを参照して可動子20の移動制御を行う。
【0049】
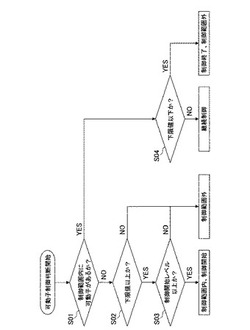
図9はサーボアンプSAにおける上記判断処理を示すフローチャートである。
サーボアンプSAは、位置検出センサPSからのA相検出信号およびB相検出信号について(A2 +B2 )の値を演算して、下記の判断を行う。
【0050】
ステップ01、サーボアンプSAは、(A2 +B2 )の値を演算して所定値以上、すなわち下限値LL以上か否か、制御開始レベルCL以上か否かをチェックする。
(A2 +B2 )の値が下限値LL未満か、制御開始レベルCL未満で所定の範囲内にない場合、サーボアンプSAはステップ02へと移行する。
また、(A2 +B2 )の値が下限値LL以上で、かつ、制御開始レベルCL以上の場合、サーボアンプSAは、制御可能であると判断して、位置検出センサPSからのA相検出信号およびB相検出信号を参照して、可動子20の制御を開始するとともに、ステップ04の処理に移行する。
【0051】
ステップ02、ステップ01で演算した(A2 +B2 )の値が下限値LL未満か、制御開始レベルCL未満で所定の範囲内にない場合、サーボアンプSAは引き続き(A2 +B2 )の値を演算し、(A2 +B2 )の値が図8に図解した下限値LL以上か否かをチェックする。
(A2 +B2 )の値が下限値LL未満の場合、サーボアンプSAは、この状態は制御対象外として、たとえば、制御装置40を介してそのメッセージを出力するか、および/または、警告表示をして(第1アラーム)、可動子20の制御を行わない。
また、(A2 +B2 )の値が下限値LL以上の場合、サーボアンプSAはステップ03の処理に移行する。
【0052】
ステップ03、サーボアンプSAはステップ02で演算した(A2 +B2 )の値が、図8に図解した下限値LL以上の場合、サーボアンプSAは、(A2 +B2 )の値が制御開始レベルCL以上か否かをチェックする。
(A2 +B2 )の値が制御開始レベルCL未満の場合、サーボアンプSAは、この状態は制御対象外として、たとえば、制御装置40を介してそのメッセージを出力するか、および/または、警告表示をして(第2アラーム)、可動子20の制御を行わない。
また、(A2 +B2 )の値が制御開始レベルCL以上の場合、サーボアンプSAは、制御可能であると判断して、位置検出センサPSからのA相検出信号およびB相検出信号を参照して、可動子20の制御を開始する。
【0053】
ステップ04、ステップ01で演算した(A2 +B2 )の値が下限値LL以上で、かつ、制御開始レベルCL以上の場合、サーボアンプSAは引き続き(A2+B2 )の値を演算し、(A2+B2 )の値が図8に図解した下限値LL以下にならないかをチェックする。
(A2 +B2 )の値が下限値LL以上の場合、サーボアンプSAは、制御可能と判断して、可動子20の制御を継続する。
また、(A2 +B2 )の値が下限値LL未満の場合、サーボアンプSAは制御対象外と判断して、可動子20の制御を停止する。
【0054】
以上述べたように、サーボアンプSAは、位置検出センサPSのA相検出信号AおよびB相検出信号Bについて、(A2 +B2 )を演算し、演算結果(A2 +B2 )に基づいて、可動子20の移動制御が可能か否かを判断することができる。
【0055】
本実施の形態による、判断方法は、サーボアンプSAにおける(A2 +B2 )という簡単な演算と、上述した簡単な判断処理で行うことができるので、マグネット可動型リニアモータの動作中において、実時間で判断することができる。
【0056】
第2実施の形態
第1実施の形態は、リニアモータ装置100に適用するリニアモータとして、マグネット可動型リニアモータを例示して述べた。しかしながら、上述した本願発明は、マグネット可動型リニアモータに限らず、電磁コイル可動型リニアモータについても適用することができる。
リニアモータとして電磁コイル可動型リニアモータを用いる場合、可動子に複数組の電磁コイルと位置検出センサPSとを配設し、固定子に複数組の永久磁石を長手方向に配設する。電磁コイル可動型リニアモータにおいては可動子として電磁コイルが移動する。
電磁コイル可動型リニアモータにおいても、制御装置で位置検出センサの検出結果をもとに、可動子の位置を制御し、さらに、可動子が所定の可動範囲を逸脱しないように制御する。
【0057】
本発明の実施に際しては上述した実施の形態に限らず、種々の変形態様をとることができる。
なお、上述した電磁コイル組の数、可動子20に搭載されたマグネットの数などは例示であり、本発明は、これらの数に限定されない。
基本的には、1個の可動子20のマグネットに磁気的影響を与えるのは、1個のサーボアンプSAで制御している電機コイルである。なお、可動子20の位置によっては、3個の電磁コイルのうち、2つの電磁コイルだけで可動子20を駆動することがある。
【0058】
また、図4を参照して例示したが、隣接する電磁コイル組の間隔(ピッチ)は常に一定である必要はない。電磁コイルによって可動子を移動可能に構成されており、位置検出センサPSによって可動子の位置を検出することができ、位置検出センサPSからA相検出信号AとB相検出信号Bとが正常に検出可能であればよい。
【0059】
以上、本実施の形態として、図2を参照して搬送装置にリニアモータを適用した場合を例示したが、本発明のリニアモータ装置100は、搬送装置への適用に限定されず、種々の用途に適用可能である。
固定子200としては、図2に例示した構成に限らず、たとえば、図10に図解した競技場のトラックのように、直線状固定子201A、203A、半径Rの半円状固定子202A、204Aとで構成したものでもよい。半円状固定子202A、204Aを可動子20が移動するとき、上述した判断を行うことができる。
【符号の説明】
【0060】
1…マグネット可動型リニアモータ
10、100…固定子、11…固定部
20…可動子、21…支持部
30…サーボアンプ群、31…動力線、32…センサ線
40…制御装置
200…固定子、201、202、203、204…直線状固定子、205、206、207、208…曲線状固定子
【技術分野】
【0001】
本発明は、リニアモータに関する。
本発明は特に、曲線状の部分を含む固定子に対しても可動子を移動可能とするリニアモータに関する。
特定的には、本発明は、曲線状の部分を含む固定子に対しても可動子を移動させるリニアモータの制御判断方法および制御装置に関する。
【背景技術】
【0002】
リニアモータは、通常、直線状に形成された固定子に対して可動子が直線的に移動可能に構成されている。
【0003】
マグネット可動型リニアモータは、固定子と可動子とを有する。たとえば、特許文献1に記載のとおり、固定子は、たとえば、120度づつ位相がずれた電流が印加される複数の電磁コイルの組を長手方向に複数配設して形成されており、可動子は、固定子に対向する位置に移動可能に配設され、異なる磁極(N極とS極)の永久磁石(マグネット)を交互に少なくとも1組配設して構成されている。
その動作は、複数の電磁コイルに、たとえば、120度づつ位相がずれた電流を印加することにより、複数の電磁コイルに発生する120度づつ位相が異なる交番磁力によって可動子が固定子に対して移動させられる。
【0004】
電磁コイルに印加する電流の位相を、順方向または逆方向に変化させることにより、可動子を固定子に対して往復移動させることもできる。
マグネット可動型リニアモータには、固定子に対する可動子の位置を検出する位置検出センサが設けられ、位置検出センサの検出結果をもとに、固定子に対する可動子の位置を制御し、さらに、可動子が所定の固定子の可動範囲を逸脱しないように制御する。
【0005】
他方、マグネット可動型リニアモータとは逆に、可動子に複数組の電磁コイルを配設し、固定子に複数組の永久磁石を長手方向に配設した、電磁コイル可動型リニアモータも知られている。
電磁コイル可動型リニアモータにおいては、可動子として電磁コイルが移動する。電磁コイル可動型リニアモータにおいても、制御装置と位置検出センサを設けて、制御装置で位置検出センサの検出結果をもとに、可動子の位置を制御し、さらに、可動子が所定の固定子の可動範囲を逸脱しないように制御する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2815655号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
リニアモータとは、たとえば、図1に図解のごとく、可動子を備えた搬送体Cが、直線状の固定子200Aに対して直線状(リニア)に移動するモータである。
このリニアモータの利点を活用して、可動子を直線状に移動させるだけでなく、曲線状にも移動させたいという要望がでている。
【0008】
図2(A)を参照してその用途の1例を述べる。
図2(A)は、リニアモータを搬送装置に適用した例を示す。
図2(A)に図解のリニアモータ装置100は、それぞれが直線状に構成された直線状固定子201、202、203、204を矩形状に配置し、隣接する直線状固定子をそれぞれ曲率Rの曲線状固定子205、206、207、208で結合した巡回状の固定子200を有する。固定子には電磁コイルが配設されている。
搬送装置に適用したリニアモータ装置100において、巡回状の固定子200を、それぞれが可動子によって搬送される複数の搬送体C1〜C10が巡回して移動可能に配設されている。各可動子にはマグネット(永久磁石)が固定されている。
各搬送体Cに1個の可動子が装着されており、その可動子が固定子に対して移動することにより、搬送体Cが固定子に対して移動する。搬送体C1〜C10にはそれぞれワークが搭載されており、巡回状の固定子200の所定の位置において、ワークに対して所定の処理が行われる。
【0009】
図2(A)に図解したリニアモータ装置100において、直線状固定子201、202、203、204の部分を、搬送体C1〜C10の可動子が移動することには、問題がない。しかしながら、たとえば、曲線状固定子205の部分を、搬送体C1〜C10(以下、代表して搬送体C)の可動子が移動する場合には問題が起こる場合がある。
【0010】
図2(B)に、図2(A)に図解した、たとえば、曲線状の固定子205と、その両側に位置する直線状固定子201、202の拡大図を示す。
図2(B)の図解のように、搬送体Cを移動させる可動子(図示なし)が移動する軌跡に沿って、曲線状固定子205およびその両側の直線状固定子201、202に、複数組の電磁コイルと各組の電磁コイルに(図示なし)隣接して配設し、可動子の位置検出のために複数の位置検出センサを配設している。
【0011】
各位置検出センサは、1対のマグネット(N極、S極のマグネット)に対して、90度位相が異なる2つの検出値、すなわち、A相検出値、B相検出値を出力する。
位置検出センサは可動子の位置を検出するために使用するが、90度位相が異なるA相検出値、B相検出値を出力して、可動子の進行方向を検出可能としている。たとえば、A相検出値がB相検出値より早く検出値を示す場合は、可動子は右側に移動しており、逆に、B相検出値がA相検出値より早く検出値を示す場合は、可動子は左側に移動していることを示している。
【0012】
このような電磁コイル可動型リニアモータを制御する、制御装置で複数の位置検出センサで検出した検出値を読み取った結果を図3に示す。横軸は位置を示し、縦軸は位置検出センサの検出値の振幅を示している。
図3に図解の例は、A相の検出値(Xデータ)が、B相の検出値(Yデータ)より先に検出されている。
【0013】
図3を参照すると、可動子が位置検出センサの上にさしかかった直後、および、可動子が位置検出センサから離れる際に、位置検出センサの振幅が小さい。さらに、位相差が90度に保持されるべきA相検出信号とB相検出信号との位相差が90度でなくなっている。
また、図3を参照すると、曲線状固定子の部分では、可動子が位置検出センサ上を移動している場合でも、A相検出信号とB相検出信号との振幅が一定していない。
【0014】
このような現象が発生する理由は、たとえば、下記に起因する。
リニアモータ装置100には、種々の搬送体C1〜C10がそれぞれ可動子によって搬送される。種々の搬送体C1〜C10は寸法および/または重量が異なる。
同じ搬送体Cでも、搭載されるワークの有無によっても重量が変化する。
可動子と固定子との離間距離が変化することがある。
搬送体Cが安定した速度で搬送されている場合と、一端停止して再始動され加速がかかる場合とがある。
上記例示した条件の相違に起因して、たとえば曲線状の固定子205、もしくは、曲線状の固定子206、207、208の部分で、位置検出センサの検出信号が正常な値を示さなくなることがある。このような状態に陥ると、制御装置は、搬送体Cを正確かつ安定に搬送することが困難となる。
このように、本願発明の発明者は、上述した位置検出センサの検出値をそのまま用いると、可動子を曲線状固定子の部分を安定して移動させることが難しいという問題を見いだした。
【0015】
本発明は、可動子を直線状固定子だけでなく曲線状固定子部分にも移動させるリニアモータの制御判断方法および制御装置を提供することを目的とする。
【課題を解決するための手段】
【0016】
本願発明の発明者は、可動子を曲線状固定子の部分にも移動させるリニアモータ装置について、特に、曲線状固定子の部分について、位置検出センサのA相検出信号の2乗と、A相検出信号と90度位相差があるB相検出信号の2乗との和を判断することにより、リニアモータ装置の可動子が正常に制御可能か否かを判断できることを見いだした。
本願発明は係る知見に基づく。
【0017】
本発明によれば、固定子と、当該固定子に対向して配設され、前記固定子に対して移動可能な可動子と、当該可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサと、を有するリニアモータの制御判断方法であって、
前記第1の信号の2乗と前記第2の信号の2乗との和を算出し、
前記2乗和が所定の値以上にあるとき、前記リニアモータが制御可能であると判断する
リニアモータの制御判断方法が提供される。
【0018】
また本発明によれば、固定子と、当該固定子に対向して配設され、前記固定子に対して移動可能な可動子と、当該可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する位置検出センサと、を有するリニアモータを制御する制御装置であって、
前記第1の信号の2乗と前記第2の信号の2乗との和を算出する手段と、
前記2乗和が所定の値以上にあるとき、前記リニアモータが制御可能であると判断する、判断手段と
を有する、リニアモータの制御装置が提供される。
【0019】
上記リニアモータに使用するリニアモータとしては、マグネット可動型リニアモータまたは電磁コイル可動型リニアモータのいずれでもよい。
【発明の効果】
【0020】
本発明によれば、可動子を曲線状固定子の部分にも移動可能とするリニアモータの種々の状態または条件について、制御可能か否かを判断することができる。
【図面の簡単な説明】
【0021】
【図1】図1は可動子が直線状の固定子に対して移動させる場合を示す図である。
【図2】図2(A)は直線状固定子と曲線状固定子とで矩形に構成された巡回形の固定子と、この巡回形の固定子の上を移動して搬送体C1〜C10を移動させる可動子を示す図であり、図2(B)は、図2(A)における曲線状固定子の部分を拡大した図である。
【図3】図3は、図2(B)に図解した曲線状固定子の部分を可動子が移動したときの位置検出センサの検出値の例を示す図である。
【図4】図4は可動子が直線状固定子の部分移動する場合の、リニアモータの構成を示す図であり、図4(A)は平面図、図4(B)〜(D)は断面電磁コイルである。
【図5】図5は図4における位置検出センサと可動子に配設されたマグネットとの位置関係と位置検出を示す図である。
【図6】図6は、図4に図解したリニアモータにおける位置検出センサの検出信号の波形を示す図である。
【図7】図7は、位置検出センサPS、電磁コイルなどの配置が不適切な場合の位置検出センサのA相検出信号の2乗とB相検出信号の2乗との和(2乗和)を時系列にプロットした図である。
【図8】図8は、可動子が移動した時の位置検出センサのA相検出信号の2乗とB相検出信号の2乗との和(2乗和)を時系列にプロットした図である。
【図9】図9は、図4に図解したサーボアンプ群における制御条件を判断する処理を示すフローチャートである。
【図10】図10は本発明の他の実施の形態として、リニアモータを用いた他の搬送装置の概略構成を示す図である。
【発明を実施するための形態】
【0022】
本発明のリニアモータの制御判断方法および制御装置の実施の形態について述べる。
【0023】
第1実施の形態
本発明のリニアモータの第1の実施の形態として、マグネット可動型リニアモータを搬送装置に適用した例を例示する。
図4は、本発明の実施の形態としてマグネット可動型リニアモータを用いた搬送装置における、可動子が固定子に対して直線状に移動する部分の構造を図解した図である。
図4(A)は平面図を示し、図4(B)〜(D)は断面図を示す。
【0024】
図4において、搬送装置に適用したマグネット可動型リニアモータ1は、固定子10と、固定子10に対向して位置し固定子10に対して移動可能な可動子20と、サーボアンプ群30とを有する。
図4に図解したマグネット可動型リニアモータ1は、複数のサーボアンプ(SA)を用いて、1個または複数の可動子20の移動位置を制御して可動子20を固定子10に対して移動させる構成のリニアモータである。
このマグネット可動型リニアモータ1を制御するため、マグネット可動型リニアモータ1の他に制御装置40が設けられている。
なお、サーボアンプ群30を、マグネット可動型リニアモータ1に含めるか、制御装置40と同様、マグネット可動型リニアモータ1には含めないことにすることもできる。
【0025】
固定子10は固定部11を有する。
固定部11には、隣接して配設された複数、この例示では、3個の電磁コイル組が配設されている。各電磁コイル組は、U相電磁コイル、V相電磁コイル、W相電磁コイルを1組として構成されている。各電磁コイル組(グループ)が、所定ピッチPずつ隔てて複数組、固定部11の長手方向に配設されている。
各組の3個のU相電磁コイル、V相電磁コイル、W相電磁コイルには、サーボアンプ群30の対応するサーボアンプから動力線31を介して、それぞれ、120度位相がずれた交流電流が印加される。
固定部11には、可動子20の位置を検出するため、各電磁コイル組に隣接して位置検出センサPSがそれぞれ配設されている。
【0026】
固定子10に対して相対的に移動する可動子20は、支持部21を有する。支持部21にはワークが搭載される。本実施の形態において、可動子20と支持部21とを総称して搬送体Cと呼ぶ。
支持部21には、固定子10の電磁コイル組に対向する側にN極を示すN極マグネットと、電磁コイル組に対向する側に固定子10に対してS極を示すS極マグネットとが隣接して配設され、これらN極、S極マグネットを1対とした、マグネットの対が複数組、図解の実施の形態では4組、隣接して配設されている。
図4に図解の例示においては、1対のマグネットとして、たとえば、N1とS1、N2とS2として、図解したが、磁極の異なる隣接するマグネットとしては、上述した対の関係に限らず、たとえば、S1とN2、N2とS3との関係のように、異なる磁極のマグネットが隣接している関係をも意味する。
【0027】
サーボアンプ群30の各サーボアンプ(SA)から、動力線31を介して対応する電磁コイル組のU相電磁コイル、V相電磁コイル、W相電磁コイルに、それぞれ、120度位相がずれた交流電流が印加される。これにより、1サイクル、360度について、120度位相がずれた磁力がこの電磁コイル、U相電磁コイル、V相電磁コイル、W相電磁コイルから発生されて、近接した位置にある可動子20のマグネットに作用して、可動子20を移動させる。
【0028】
サーボアンプ群30の各サーボアンプ(SA)に接続されたセンサ線32を介して対応する位置検出センサPSからの検出信号がサーボアンプ(SA)を介して制御装置40に入力される。
【0029】
U相電磁コイル、V相電磁コイル、W相電磁コイルを1組とする電磁コイル組Aと、近接して配設されたU相電磁コイル、V相電磁コイル、W相電磁コイルを1組とする電磁コイル組BとはピッチPだけ離間して配設されている。他の近接する電磁コイル組との配置関係も同様である。
このピッチPの間に、3個の電磁コイル、すなわち、U相電磁コイル、V相電磁コイル、W相電磁コイルが近接して配置されている。3個の電磁コイルの幅は、ピッチP1である。
各電磁コイル組内のW相電磁コイルに隣接して、それぞれ、位置検出センサPSが配設されている。位置検出センサPSの幅はピッチP2である。
【0030】
マグネットと電磁コイルとの関係は、基本的には、1個の電磁コイルで1個のマグネットを移動可能とする。
好ましくは、2対のマグネット、すなわち、4個のマグネット、たとえば、N1:S1,N2:S2(なお、S1:N2,S2:N3でもよい)の配設幅が、3個の隣接して配設された電磁コイルの配設幅であるピッチP1に等しい(マグネット4に対して電磁コイル3の配設関係、4:3)。
また好ましくは、1対のマグネット(N:S)の配設幅が位置検出センサPSの幅であるピッチP2に等しい。
好ましくは、3対のマグネット、たとえば、N1:S1,N2:S2,N3:S3のマグネットの配設幅が、3個の電磁コイルの配設幅であるピッチP1と、位置検出センサPSの幅であるピッチP2との和、(P1+P2)にほぼ等しい。
なお、好ましくは、4対のマグネット、たとえば、N1:S1,N2:S2,N3:S3,N4:S4のマグネット対の配設幅(配設長さ)Lは、(P1+P2)より長い。
また、3対のマグネットの配設幅と上記ピッチP1ピッチP2の和にほぼ等しければ、U相電磁コイル、V相電磁コイル、W相電磁コイルを1組とする近接する電磁コイル組は上記の如く離間させるだけでなく、近接させてもよい。
【0031】
複数対、たとえば、4対のマグネット、たとえば、N1:S1,N2:S2,N3:S3,N4:S4のマグネット対の配設幅(配設長さ)Lが、図4(B)〜(D)に図解のように、4対のマグネットのいずれか1対、または、近接する異なる磁極のマグネット、たとえば、S3:N4のマグネット対が位置検出センサPSの上に位置するように、マグネット対の数が規定されている。なお、本実施の形態では、マグネット対の数は、4対である。このことは、可動子20がいずれの位置においても、位置検出センサPSによって搬送体Cの位置を検出可能な条件である。
【0032】
可動子20が電磁コイルの交番磁力に応じて移動可能であるためには、下記の条件が満足されることが好ましい。
(a)図4(B)に図解したように、4個、2対のマグネットが電磁コイル組Aの3個の電磁コイルの電磁力の影響を受けるか、
(b)図4(D)に図解のごとく、4個、2対のマグネットが電磁コイル組Bの3個の電磁コイルの電磁力の影響を受けるように、
マグネットの個数を設ける。
【0033】
好ましくは、可動子20の移動を円滑にするため、可動子20の位置に依存せずに電磁コイルから同じ電磁力を受けるためには、3個の電磁コイルの電磁力の作用を、常に所定個数、たとえば、本実施の形態では、4個のマグネットが受けるように構成することもできる。
たとえば、同じ電磁コイル組内の3個の電磁コイル、または、隣接する2つの電磁コイル組の隣接する3個の電磁コイル、たとえば、電磁コイル組AのW相電磁コイルと電磁コイル組BのU相電磁コイルとV相電磁コイルとの3個の電磁コイルの電磁力の作用を、4個のマグネットが受ける、または、電磁コイル組AのV相電磁コイルとW相電磁コイルと、電磁コイル組BのU相電磁コイルとの3個の電磁コイルの電磁力の作用を、4個のマグネットが受けるように構成されていることが望ましい。
この場合、可動子20の支持部21には、たとえば、10個のマグネット、すなわち、5対のマグネットを設ける。
【0034】
図5は、位置検出センサPSと、可動子20の支持部21に配設されたマグネットとの位置関係を示す。
図5は、概念的に、可動子20が移動していく場合に、それぞれ、ある1つの位置検出センサPSがその位置を検出する状態を示している。
各位置検出センサPSは、A相検出信号を生成する第1のセンサAと、B相検出信号を生成する第2のセンサBとを有する。第1のセンサAと第2のセンサBとは、90度位相差のある位置検出信号を生成するように、隣接するマグネットとのピッチを考慮して、たとえば、離間して配置されている。
第1のセンサAと第2のセンサBは、たとえば、ホール(Hole)効果に基づくセンサであり、マグネットの磁界に応じた検出信号を出力する。
【0035】
図6は、図4に図解したマグネット可動型リニアモータ1における、可動子20が移動した場合の複数の位置検出センサPSの検出信号、すなわち、A相検出信号とB相検出信号とを示すグラフである。横軸は位置を示し、縦軸は振幅を示す。
位置検出センサPS内の第1のセンサAと第2のセンサBは、それぞれ、マグネットの磁界に応じた振幅(電圧)の信号を出力する。たとえば、マグネットが位置検出センサPSに接近すれば、大きな振幅の信号、マグネットが位置検出センサPSから離れると小さな振幅の信号を出力する。
ワークを搭載可能な搬送体Cを構成する可動子20は所定のスピードで固定子10の上を移動するので、第1のセンサAおよび第2のセンサBの検出信号、すなわち、A相検出信号およびB相検出信号は、正弦波状(または余弦波状)となる。
【0036】
図6に図解したA相検出信号およびB相検出信号は、可動子20が直線状の固定子10に対して移動する場合なので、位相差が90度に維持されており、それぞれの振幅も一定に安定している。
【0037】
可動子20が位置検出センサPSの上を移動すると、たとえば、図6に図解した、正弦波のA相検出信号およびB相検出信号が得られる。
可動子20の位置をXとすると、下記の関係が得られる。
【0038】
X=tan-1(B/A) …(1)
ただし、AはA相検出信号であり、
BはB相検出信号である。
【0039】
このとき、位置検出センサのA相検出信号AとB相検出信号Bとの2乗の和は一定値Cとなる。
【0040】
A2 +B2 =C …(2)
【0041】
このような状態において、サーボアンプ(SA)が、後述するように、搬送体Cが制御可能か否かを判断し、制御装置40は、サーボアンプSAを介して入力される位置検出センサPSからの複数の位置データに基づいて、搬送体Cを構成する可動子20の位置を検出して、位置制御を行う。
たとえば、制御装置40は、位置検出センサPSからの位置検出値、すなわち、A相検出信号およびB相検出信号に基づいて、搬送体Cを構成する可動子20の移動量、および/または、可動子20を移動させる速度に応じて、サーボアンプSAを介して対応する各電磁コイルに印加する電流の値を決定する。
対応するサーボアンプSAは、駆動電流を対応する電磁コイルに印加する。
【0042】
以上、図4を参照して、搬送体Cを構成する可動子20が、直線状固定子10を移動する場合を述べたが、本実施の形態においては、図2(A)、(B)に図解したように、直線状固定子201、曲線状固定子205、直線状固定子202、曲線状固定子206、固定子203、曲線状固定子207、直線状固定子204、曲線状固定子208、直線状固定子201と巡回状の固定子200に対して移動する。
この固定子200にも、固定子10と同様、電磁コイル組と位置検出センサPSとが所定ピッチPで配設されている。
制御装置40の制御のもとで、図4に図解した搬送体Cを構成する可動子20が、この固定子200の上を移動していく。したがって、各搬送体Cを構成する各可動子20は固定子200の上を巡回することも可能である。
【0043】
可動子20が、直線状固定子201、202、203、204の上を移動するときは、複数の位置検出センサPSによって可動子20の位置および移動方向(向き)を正確に検出することができる。
他方、可動子20が曲線状固定子205、206、207、208の上を移動するときは、図4(B)を参照して上述したように、位置検出センサPSとマグネットとの接近と離間関係に応じた振幅の低下、A相検出信号とB相検出信号と位相差の変化、さらに、A相検出信号とB相検出信号の不安定が起こる場合がある。
【0044】
その不安定さの1つとして、曲線状固定子の部分の位置検出センサPSの範囲と、電磁コイルの配置が不適切な場合、可動子20の移動の不安定さが起こる。このような場合、位置検出センサPSのA相検出信号AとB相検出信号Bについて、式(2)に従って演算した結果(A2 +B2 )が、図7に例示したように、一定にならないことが起こることが判った。
図7において、横軸は時間経過、すなわち、可動子20の移動を示し、縦軸は(A2 +B2 )を示す。
2乗和(A2 +B2 )は、サーボアンプ群30において演算した。
このような結果が得られた場合には、リニアモータ装置100の設計変更が必要なことが判る。換言すれば、2乗和(A2 +B2 )によって、可動子20の移動の安定さを自動的に判断することができる。
【0045】
その他の不安定さとしては、たとえば、上述したように、(a)リニアモータ装置100には、種々の搬送体C1〜C10がそれぞれ可動子によって搬送されるが、種々の搬送体C1〜C10は寸法および/または重量が異なる、(b)同じ搬送体Cでも、搭載されるワークの有無によっても重量が変化して動作条件が変化する、(c)可動子と固定子との距離の変化、(d)搬送体Cが安定した速度で搬送されている場合と、一旦停止して再始動され加速がかかる場合とがあるなどによる。
したがって、たとえば、同じ搬送体Cでも、ワークが搭載されているか否か、移動速度が速いか遅いかなどにより、安定な移動が可能であったり、不安定な移動になることが起こる。
【0046】
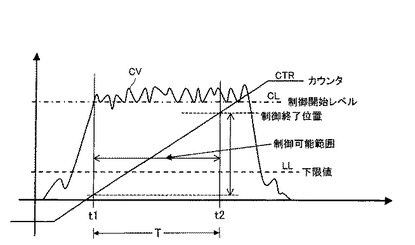
図8は、可動子20が直線状固定子201と隣接する曲線状固定子208、205の部分を移動した場合の、式(2)で規定した(A2 +B2 )の値を曲線CVで示すグラフである。
図8において、横軸は時間経過、すなわち、可動子20の移動を示し、縦軸は(A2 +B2 )を示す。
本実施の形態においては、2乗和(A2 +B2 )は、サーボアンプ群30において演算した。
【0047】
(A2 +B2 )が一定またはほぼ一定の場合、式(1)が成立して、制御装置40において、固定子200に対する可動子20の位置を特定することができる。
しかしながら、(A2 +B2 )が大きく変動したり、(A2 +B2 )の値が大きすぎたり、低すぎると、式(1)が成立せず、サーボアンプSAにおいて、可動子20の位置を特定することが困難となる。
【0048】
図8において、(A2 +B2 )の値が下限値LLより小さい場合、たとえば、センサ線32の断線により、信号が得られないと仮定する。この状態では、たとえば、制御装置40は可動子20の移動制御を行わない。
(A2 +B2 )の値が下限値LLを越え、制御開始点レベルCLを越えた時点t1からサーボアンプSAまたは制御装置40が、可動子20の移動制御を開始する。
サーボアンプSAまたは制御装置40は、位置検出センサPSのA相検出信号AまたはB相検出信号Bが制御開始点レベルCLを超えた時間を計数しており、線CTRはその計数値(カウント値)、すなわち、可動子20の位置を示す。
サーボアンプSAまたは制御装置40は、カウント値CTRが所定の値に到達した時点t2で可動子20の移動制御を停止する。
時点t1〜t2の期間T、すなわち、(A2 +B2 )の値が所定の範囲内にある期間Tにおいて、制御装置40は、位置検出センサPSの読みを参照して可動子20の移動制御を行う。
【0049】
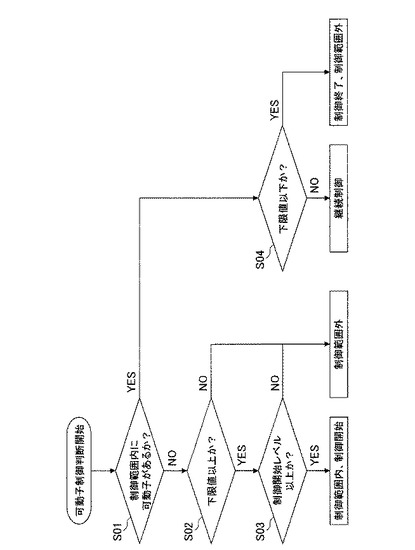
図9はサーボアンプSAにおける上記判断処理を示すフローチャートである。
サーボアンプSAは、位置検出センサPSからのA相検出信号およびB相検出信号について(A2 +B2 )の値を演算して、下記の判断を行う。
【0050】
ステップ01、サーボアンプSAは、(A2 +B2 )の値を演算して所定値以上、すなわち下限値LL以上か否か、制御開始レベルCL以上か否かをチェックする。
(A2 +B2 )の値が下限値LL未満か、制御開始レベルCL未満で所定の範囲内にない場合、サーボアンプSAはステップ02へと移行する。
また、(A2 +B2 )の値が下限値LL以上で、かつ、制御開始レベルCL以上の場合、サーボアンプSAは、制御可能であると判断して、位置検出センサPSからのA相検出信号およびB相検出信号を参照して、可動子20の制御を開始するとともに、ステップ04の処理に移行する。
【0051】
ステップ02、ステップ01で演算した(A2 +B2 )の値が下限値LL未満か、制御開始レベルCL未満で所定の範囲内にない場合、サーボアンプSAは引き続き(A2 +B2 )の値を演算し、(A2 +B2 )の値が図8に図解した下限値LL以上か否かをチェックする。
(A2 +B2 )の値が下限値LL未満の場合、サーボアンプSAは、この状態は制御対象外として、たとえば、制御装置40を介してそのメッセージを出力するか、および/または、警告表示をして(第1アラーム)、可動子20の制御を行わない。
また、(A2 +B2 )の値が下限値LL以上の場合、サーボアンプSAはステップ03の処理に移行する。
【0052】
ステップ03、サーボアンプSAはステップ02で演算した(A2 +B2 )の値が、図8に図解した下限値LL以上の場合、サーボアンプSAは、(A2 +B2 )の値が制御開始レベルCL以上か否かをチェックする。
(A2 +B2 )の値が制御開始レベルCL未満の場合、サーボアンプSAは、この状態は制御対象外として、たとえば、制御装置40を介してそのメッセージを出力するか、および/または、警告表示をして(第2アラーム)、可動子20の制御を行わない。
また、(A2 +B2 )の値が制御開始レベルCL以上の場合、サーボアンプSAは、制御可能であると判断して、位置検出センサPSからのA相検出信号およびB相検出信号を参照して、可動子20の制御を開始する。
【0053】
ステップ04、ステップ01で演算した(A2 +B2 )の値が下限値LL以上で、かつ、制御開始レベルCL以上の場合、サーボアンプSAは引き続き(A2+B2 )の値を演算し、(A2+B2 )の値が図8に図解した下限値LL以下にならないかをチェックする。
(A2 +B2 )の値が下限値LL以上の場合、サーボアンプSAは、制御可能と判断して、可動子20の制御を継続する。
また、(A2 +B2 )の値が下限値LL未満の場合、サーボアンプSAは制御対象外と判断して、可動子20の制御を停止する。
【0054】
以上述べたように、サーボアンプSAは、位置検出センサPSのA相検出信号AおよびB相検出信号Bについて、(A2 +B2 )を演算し、演算結果(A2 +B2 )に基づいて、可動子20の移動制御が可能か否かを判断することができる。
【0055】
本実施の形態による、判断方法は、サーボアンプSAにおける(A2 +B2 )という簡単な演算と、上述した簡単な判断処理で行うことができるので、マグネット可動型リニアモータの動作中において、実時間で判断することができる。
【0056】
第2実施の形態
第1実施の形態は、リニアモータ装置100に適用するリニアモータとして、マグネット可動型リニアモータを例示して述べた。しかしながら、上述した本願発明は、マグネット可動型リニアモータに限らず、電磁コイル可動型リニアモータについても適用することができる。
リニアモータとして電磁コイル可動型リニアモータを用いる場合、可動子に複数組の電磁コイルと位置検出センサPSとを配設し、固定子に複数組の永久磁石を長手方向に配設する。電磁コイル可動型リニアモータにおいては可動子として電磁コイルが移動する。
電磁コイル可動型リニアモータにおいても、制御装置で位置検出センサの検出結果をもとに、可動子の位置を制御し、さらに、可動子が所定の可動範囲を逸脱しないように制御する。
【0057】
本発明の実施に際しては上述した実施の形態に限らず、種々の変形態様をとることができる。
なお、上述した電磁コイル組の数、可動子20に搭載されたマグネットの数などは例示であり、本発明は、これらの数に限定されない。
基本的には、1個の可動子20のマグネットに磁気的影響を与えるのは、1個のサーボアンプSAで制御している電機コイルである。なお、可動子20の位置によっては、3個の電磁コイルのうち、2つの電磁コイルだけで可動子20を駆動することがある。
【0058】
また、図4を参照して例示したが、隣接する電磁コイル組の間隔(ピッチ)は常に一定である必要はない。電磁コイルによって可動子を移動可能に構成されており、位置検出センサPSによって可動子の位置を検出することができ、位置検出センサPSからA相検出信号AとB相検出信号Bとが正常に検出可能であればよい。
【0059】
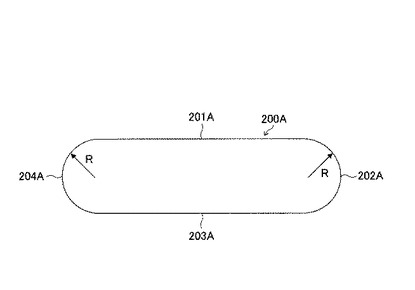
以上、本実施の形態として、図2を参照して搬送装置にリニアモータを適用した場合を例示したが、本発明のリニアモータ装置100は、搬送装置への適用に限定されず、種々の用途に適用可能である。
固定子200としては、図2に例示した構成に限らず、たとえば、図10に図解した競技場のトラックのように、直線状固定子201A、203A、半径Rの半円状固定子202A、204Aとで構成したものでもよい。半円状固定子202A、204Aを可動子20が移動するとき、上述した判断を行うことができる。
【符号の説明】
【0060】
1…マグネット可動型リニアモータ
10、100…固定子、11…固定部
20…可動子、21…支持部
30…サーボアンプ群、31…動力線、32…センサ線
40…制御装置
200…固定子、201、202、203、204…直線状固定子、205、206、207、208…曲線状固定子
【特許請求の範囲】
【請求項1】
固定子と、当該固定子に対向して配設され、前記固定子に対して移動可能な可動子と、当該可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する、位置検出センサとを有するリニアモータの制御判断方法であって、
前記第1の信号の2乗と、前記第2の信号の2乗との和を算出し、
前記2乗和が所定の値以上にあるとき、前記リニアモータが制御可能であると判断する、
リニアモータの制御判断方法。
【請求項2】
前記固定子は、直線状固定子と、曲線状固定子とを有することを特徴とする請求項1に記載のリニアモータの制御判断方法。
【請求項3】
前記固定子には、複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組が、所定の幅を隔てて複数配設されており、
前記可動子には、前記電磁コイルに対向して、磁極の異なるマグネットが交互に複数配設されており、
前記可動子に配設されたマグネットの配設幅は、前記複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組の配設幅より長いことを特徴とする請求項1または請求項2に記載のリニアモータの制御判断方法。
【請求項4】
前記固定子には、磁極の異なるマグネットが交互に複数配設されており、
前記可動子には、前記複数のマグネットに対向して、複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組が、所定の幅を隔てて複数配設されており、
前記固定子に配設されたマグネットの配設幅は、前記複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組の配設幅より長いことを特徴とする請求項1または請求項2に記載のリニアモータの制御判断方法。
【請求項5】
固定子と、当該固定子に対向して配設され、前記固定子に対して移動可能な可動子と、当該可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する、位置検出センサとを有するリニアモータを制御する制御装置であって、
前記第1の信号の2乗と、前記第2の信号の2乗との和を算出する手段と、
前記2乗和が所定の値以上にあるとき、前記リニアモータが制御可能であると判断する判断手段と、
を有するリニアモータの制御装置。
【請求項6】
前記固定子は、直線状固定子と、曲線状固定子とを有することを特徴とする請求項5に記載のリニアモータの制御装置。
【請求項7】
前記固定子には、複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組が、所定の幅を隔てて複数配設されており、
前記可動子には、前記電磁コイルに対向して、磁極の異なるマグネットが交互に複数配設されており、
前記可動子に配設されたマグネットの配設幅は、前記複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組の配設幅より長い
ことを特徴とする請求項5または請求項6に記載のリニアモータの制御装置。
【請求項8】
前記固定子には、磁極の異なるマグネットが交互に複数配設されており、
前記可動子には、前記複数のマグネットに対向して、複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組が、所定の幅を隔てて複数配設されており、
前記固定子に配設されたマグネットの配設幅は、前記複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組の配設幅より長いことを特徴とする請求項5または請求項6に記載のリニアモータの制御装置。
【請求項1】
固定子と、当該固定子に対向して配設され、前記固定子に対して移動可能な可動子と、当該可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する、位置検出センサとを有するリニアモータの制御判断方法であって、
前記第1の信号の2乗と、前記第2の信号の2乗との和を算出し、
前記2乗和が所定の値以上にあるとき、前記リニアモータが制御可能であると判断する、
リニアモータの制御判断方法。
【請求項2】
前記固定子は、直線状固定子と、曲線状固定子とを有することを特徴とする請求項1に記載のリニアモータの制御判断方法。
【請求項3】
前記固定子には、複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組が、所定の幅を隔てて複数配設されており、
前記可動子には、前記電磁コイルに対向して、磁極の異なるマグネットが交互に複数配設されており、
前記可動子に配設されたマグネットの配設幅は、前記複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組の配設幅より長いことを特徴とする請求項1または請求項2に記載のリニアモータの制御判断方法。
【請求項4】
前記固定子には、磁極の異なるマグネットが交互に複数配設されており、
前記可動子には、前記複数のマグネットに対向して、複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組が、所定の幅を隔てて複数配設されており、
前記固定子に配設されたマグネットの配設幅は、前記複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組の配設幅より長いことを特徴とする請求項1または請求項2に記載のリニアモータの制御判断方法。
【請求項5】
固定子と、当該固定子に対向して配設され、前記固定子に対して移動可能な可動子と、当該可動子の位置、および、移動の向きを示す位相差のある第1および第2の信号を出力する、位置検出センサとを有するリニアモータを制御する制御装置であって、
前記第1の信号の2乗と、前記第2の信号の2乗との和を算出する手段と、
前記2乗和が所定の値以上にあるとき、前記リニアモータが制御可能であると判断する判断手段と、
を有するリニアモータの制御装置。
【請求項6】
前記固定子は、直線状固定子と、曲線状固定子とを有することを特徴とする請求項5に記載のリニアモータの制御装置。
【請求項7】
前記固定子には、複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組が、所定の幅を隔てて複数配設されており、
前記可動子には、前記電磁コイルに対向して、磁極の異なるマグネットが交互に複数配設されており、
前記可動子に配設されたマグネットの配設幅は、前記複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組の配設幅より長い
ことを特徴とする請求項5または請求項6に記載のリニアモータの制御装置。
【請求項8】
前記固定子には、磁極の異なるマグネットが交互に複数配設されており、
前記可動子には、前記複数のマグネットに対向して、複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組が、所定の幅を隔てて複数配設されており、
前記固定子に配設されたマグネットの配設幅は、前記複数の電磁コイルが近接して配設された電磁コイル組と当該電磁コイル組に併設して配設された位置検出センサとの組の配設幅より長いことを特徴とする請求項5または請求項6に記載のリニアモータの制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−100496(P2012−100496A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−248217(P2010−248217)
【出願日】平成22年11月5日(2010.11.5)
【出願人】(000003458)東芝機械株式会社 (843)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月5日(2010.11.5)
【出願人】(000003458)東芝機械株式会社 (843)
【出願人】(000253019)澁谷工業株式会社 (503)
【Fターム(参考)】
[ Back to top ]