
リニアモータ制御装置、及び制御方法
【課題】可動子の位置や移動量を検出するセンサを設けることなく、推定する磁極位置に含まれる誤差のばらつきを低減する。
【解決手段】可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置は、予め定められた磁極位置に対応する電圧を複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、可動子が基準位置に達したと判定した際に、基準位置に対応する磁極位置を現在の磁極位置にする制御部を備える。
【解決手段】可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置は、予め定められた磁極位置に対応する電圧を複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、可動子が基準位置に達したと判定した際に、基準位置に対応する磁極位置を現在の磁極位置にする制御部を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、リニアモータ制御装置、及び制御方法に関する。
【背景技術】
【0002】
リニア同期モータ(以下、リニアモータという。)は、可動子又は固定子のいずれか一方に設けられている複数のコイルと、可動子又は固定子のいずれか他方に設けられている駆動用磁石との相対的な位置関係(磁極位置)に応じた通電をしないと、予め定められている推力定数に応じたトルク(推力)を発生させることができない。リニアモータに備えられている可動子と固定子との磁極位置を検出するセンサなどを備えていない場合、同期モータの駆動を開始する際に初期磁極位置が不明であるため、初期磁極位置を検出する必要がある。
そこで、所定の磁極位置に対応した通電(直流励磁)を行うことにより、可動子を所定の磁極位置に引き込むことで、初期磁極位置を推定している。
【0003】
しかし、直流励磁を用いて初期磁極位置を推定する場合、可動子の位置や可動子が移動する際に生じる摩擦などにより、可動子を初期磁極位置に引き込むことができない場合がある。この場合、推定した初期磁極位置と、実際の可動子の磁極位置とに差が生じてしまい、推定した初期磁極位置に誤差が生じることになる。誤差を含む磁極位置に基づいてリニアモータを制御すると、要求されるトルクを発生させることができないという問題がある。また、リニアモータを起動させる都度、磁極位置に含まれる誤差が変化すると、リニアモータが発生させるトルクにばらつきが生じてしまうという問題がある。
これに対して、直流励磁を行うとともに、その際の可動子の移動量を用いて初期磁極位置を推定する精度を向上させる技術が検討されている(特許文献1)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−049831号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、可動子の移動量を検出するセンサを用いる必要があるため、次の問題がある。移動量を検出するセンサをリニアモータに取り付けるための場所を確保する必要があるため、リニアモータを設計する際の自由度が低下する。また、センサに附随するアナログ回路やケーブル等の実装が必要になる。また、アナログ回路やケーブル等を必要とするため、リニアモータの製造コストが増加する。
【0006】
本発明は、上記問題を解決すべくなされたもので、その目的は、可動子の位置や移動量を検出するセンサを設けることなく、推定する磁極位置に含まれる誤差のばらつきを低減できるリニアモータ制御装置、及び制御方法を提供することにある。
【課題を解決するための手段】
【0007】
上記問題を解決するために、本発明は、可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置であって、予め定められた磁極位置に対応する電圧を前記複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、前記可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、前記可動子が前記基準位置に達したと判定した際に、前記基準位置に対応する磁極位置を現在の磁極位置にする制御部を備えることを特徴とするリニアモータ制御装置である。
【0008】
また、上記問題を解決するために、本発明は、可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの制御方法であって、予め定められた磁極位置に対応する電圧を前記複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、前記可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、前記可動子が前記基準位置に達したと判定した際に、前記基準位置に対応する磁極位置を現在の磁極位置にする制御ステップを有することを特徴とする制御方法である。
【発明の効果】
【0009】
この発明によれば、例えば直流励磁を行った後に、リニアモータの可動子を可動子の可動範囲内の予め定められた基準位置に移動させる。基準位置では、コイルと駆動用磁石との位置関係が一意に定まるので、基準位置に可動子を移動させた際の磁極位置を、基準位置に対応する磁極位置に変更する補正を行うことにより、磁極位置を推定するたびに生じる誤差を低減させるとともに、誤差のばらつきを抑えることができる。磁極位置を推定する際の誤差の低減、及び誤差のばらつきを抑えることにより、推定の精度を向上させることができ、リニアモータが発生させるトルクを安定させることができる。
【図面の簡単な説明】
【0010】
【図1】本実施形態におけるリニアモータ装置1の構成を示す概略ブロック図である。
【図2】本実施形態におけるリニアモータ10の斜視図(一部断面図)である。
【図3】本実施形態におけるコイルホルダ105に保持されたコイルユニットを示す斜視図である。
【図4】本実施形態におけるリニアモータ10のマグネット103とコイル104の位置関係を示す図である。
【図5】本実施形態における磁極位置を補正する処理を示すフローチャートである。
【図6】リニアモータ装置1を適用した加工装置の構成例を示す図である。
【発明を実施するための形態】
【0011】
以下、図面を参照して、本発明の実施形態におけるリニアモータ制御装置、及び制御方法を説明する。
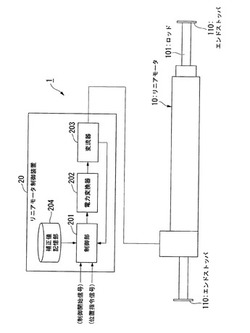
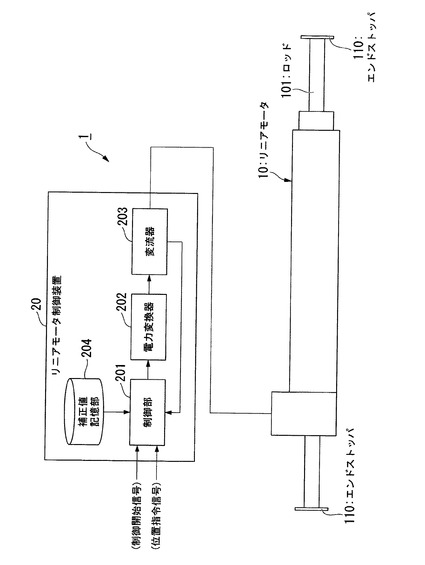
図1は、本実施形態におけるリニアモータ装置1の構成を示す概略ブロック図である。同図に示されているように、リニアモータ装置1は、ロッドタイプのリニアモータ10と、リニアモータ10を制御するリニアモータ制御装置20とを具備している。
【0012】
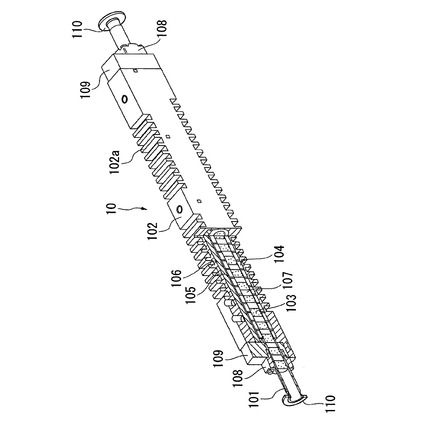
図2は、本実施形態におけるリニアモータ10の斜視図(一部断面図)である。リニアモータ10は、コイル収容ケース102に対してロッド101が軸線方向に移動する。
コイル収容ケース102内には、コイルホルダ105に保持された複数のコイル104が積層(配列)されている。コイル収容ケース102の両端面それぞれには、エンドケース109が取り付けられている。エンドケース109には、ロッド101の直線運動を案内するための軸受けであるブッシュ108が取り付けられている。
【0013】
ロッド101は、例えばステンレス等の非磁性材からなり、パイプのように中空の空間を有する。ロッド101の中空空間には、円柱状の複数のマグネット103(セグメント磁石)が互いに同極を対向させて積層されている。すなわち各マグネット103は、隣接するマグネット103の一方とN極同士を対向させ、隣接するマグネット103の他方とS極同士を対向させて積層されている。マグネット103の間には、例えば鉄等の磁性体からなるポールシュー107(磁極ブロック)が介在されている。ロッド101は、積層されたコイル104内を貫通するとともに、コイル収容ケース102に軸線方向に移動可能に支持されている。また、ロッド101の両端にはエンドストッパ110が取り付けられており、ロッド101が可動範囲を超えて移動しないようになっている。
【0014】
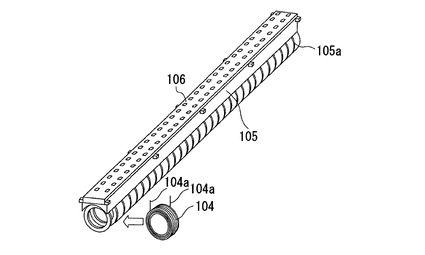
図3は、本実施形態におけるコイルホルダ105に保持されたコイルユニットを示す斜視図である。同図に示されるように、コイル104は銅線を螺旋状に巻いたもので、コイルホルダ105に保持されている。すなわち、複数のコイル104は、ロッド101のマグネット103が配列されている方向を中心として、ロッド101の外周に沿って銅線が巻かれたものであり、各コイル104がマグネット103の配列されている方向と同じ方向に配列されている。
隣接するコイル104を絶縁させる必要があるので、コイル104間にはリング状の樹脂製スペーサ105aが介在される。コイルホルダ105上にはプリント基板106が設けられる。コイル104の巻線の端部104aは、プリント基板106に結線される。
【0015】
本実施形態では、コイル104及びコイルホルダ105を金型にセットし、溶融した樹脂又は特殊セラミックスを金型内に注入するインサート成形によって、コイル収容ケース102をコイル104と一体に成形する。図2に示されるように、コイル収容ケース102には、コイル104の放熱性を高めるためにフィン102aが複数形成される。なお、コイルホルダ105に保持されたコイル104をアルミ製のコイル収容ケース102に収納し、コイル104とコイル収容ケース102との間のすきまを接着剤で埋めて、コイル104及びコイルホルダ105をコイル収容ケース102に固定してもよい。
【0016】
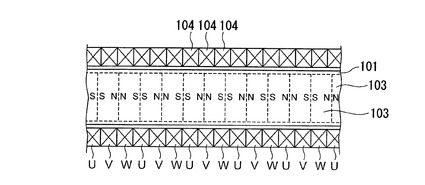
図4は、本実施形態におけるリニアモータ10のマグネット103とコイル104の位置関係を示す図である。ロッド101内の中空空間には、円柱状の複数のマグネット103(セグメント磁石)が互いに同極が対向するように配列される。コイル104は3つでU・V・W相からなる一組の三相コイルとなる。一組の三相コイルを複数組み合わせて、コイルユニットが構成される。U・V・W相の三相に分けた複数のコイル104に120°ずつ位相が異なる三相電流を流すと、コイル104の軸線方向に移動する移動磁界が発生する。ロッド101は、駆動用磁石としての各マグネット103が生じさせている磁界と、移動磁界との作用により推力を得て、移動磁界の速さに同期してコイル104に対して相対的に直線運動を行う。
【0017】
図1に戻って、リニアモータ制御装置20の構成について説明する。
リニアモータ制御装置20は、制御部201と、電力変換器202と、変流器203と、補正値記憶部204とを備えている。制御部201は、上位の装置から制御開始信号が入力されると、リニアモータ10の初期磁極位置の推定、及び原点復帰処理を行う。また、制御部201は、上位の装置から入力される位置指令信号と、リニアモータ10のU、V、W相それぞれのコイル104に流れる電流値とに基づいて、U、V、W相それぞれのコイルに印加する電圧を算出する。また、制御部201は、算出した電圧を示す電圧指令信号を電力変換器202に出力する。
電力変換器202は、制御部201から入力される電圧指令信号に応じた電圧をリニアモータ10のU、V、W相それぞれのコイル104に印加する。変流器203は、電力変換器202とリニアモータ10とを接続している電力線に取り付けられており、当該電力線に流れている電流値を測定し、測定結果を制御部201に出力する。
補正値記憶部204には、原点復帰処理を行った際に磁極位置を補正する補正値が記憶されている。具体的には、リニアモータ10のロッド101が予め定められた基準位置にある場合における磁極位置が補正値として補正値記憶部204に記憶されている。補正値記憶部204に記憶されている磁極位置は、例えば、2つのエンドストッパ110のうちいずれか一方がエンドケース109に接触しているときの磁極位置と、エンドストッパ110のうちいずれか他方がエンドケース109に接触しているときの磁極位置とである。この場合、基準位置は、エンドストッパ110とエンドケース109とが接触している位置、すなわち可動範囲の両端である。
【0018】
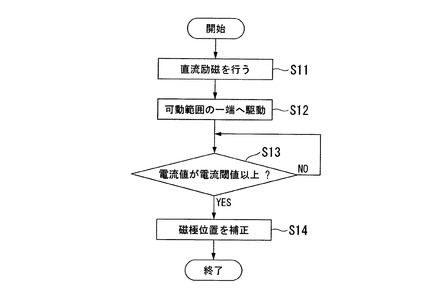
図5は、本実施形態における磁極位置を補正する処理を示すフローチャートである。
制御部201は、例えば電力の供給が開始された後などに、制御開始信号が入力されると、予め定められた磁極位置に対応する位相差を有する電圧(直流励磁)をU、V、W相それぞれのコイル104に印加し、予め定められた磁極位置にロッド101を引き込む(ステップS11)。
制御部201は、予め定められた磁極位置にロッド101が位置するものとみなして、可動範囲の両端のうち予め定めた一方の端に向けてロッド101を移動させる制御を原点復帰処理として行う(ステップS12)。すなわち、制御部201は、ロッド101の一端に取り付けられているエンドストッパ110とエンドケース109とが接触するまで、ロッド101を移動させる制御を行う。
【0019】
制御部201は、リニアモータ10のU、V、W相それぞれに流れる電流の電流値のいずれかが予め定められた電流閾値以上であるか否かを判定し(ステップS13)、すべての電流値が電流閾値未満の場合(ステップS13:NO)、U、V、W相に流れる電流のいずれかが電流閾値以上になるまで、判定を繰り返し行う。
一方、U、V、W相に流れる電流のいずれかが電流閾値以上になった場合(ステップS13:YES)、制御部201は、ロッド101が可動範囲の一方の端に到達したと判定し、当該端に対応する磁極位置(補正値)を補正値記憶部204から読み出し、ロッド101の現在の磁極位置を読み出した磁極位置に変更する補正を行い(ステップS14)、磁極位置を補正する処理を終了する。
なお、ステップS13における電流閾値は、実機を用いた測定結果やシミュレーションの結果に基づいて定められる。
【0020】
本実施形態のリニアモータ制御装置20は、電力の供給が開始された直後においてロッド101の磁極位置が不明な状態から、直流励磁によりロッド101を予め定められた磁極位置に引き込み、ロッド101の初期磁極位置を予め定められた磁極位置とみなしてリニアモータ10の駆動を開始させる。また、リニアモータ制御装置20は、ロッド101の絶対位置を検出するために可動範囲の一方の端までロッド101を移動させる。このとき、リニアモータ制御装置20は、現在の磁極位置を可動範囲の一方の端に対応する磁極位置に補正することで、直流励磁の際に推定した初期磁極位置に対して生じる誤差を補正し、磁極位置のばらつきを補正する。
直流励磁によるロッド101の引き込みにより初期磁極位置を推定する場合、ロッド101に加わる摩擦等により初期磁極位置に誤差が生じることがある。これに対して、可動範囲の一方の端までロッド101を移動させた際の磁極位置はロッド101内に設けられているマグネット103と、コイル104との位置関係により一意に決まるため、推定する磁極位置の誤差を低減させることができる。
更に、リニアモータ制御装置20は、ロッド101を動かす際に要するトルクが大きくなるとコイル104に流れる電流値が大きくなることを利用して、ロッド101が可動範囲の端に達したか否かを判定している。これにより、ロッド101(可動子)の位置を検出するセンサ等を設けることなく、ロッド101が可動範囲の端に達したか否かを検出することができ、ロッド101の磁極位置を推定する精度を向上させることができる。
また、リニアモータ制御装置20が備える制御部201をマイクロコントローラ等で実装する場合、直流励磁を用いて磁極位置を推定する装置構成に対してハードウエアの追加をすることなく、図5に示した制御方法を実装できるので、製造コストを増加させることなく、磁極位置の推定精度を向上させることができる。また、センサレス制御を行うリニアモータ10では、原点復帰が必ず行われるため、ユーザに時間的な負担を強いることなく磁極位置の補正を行うことができる。
【0021】
一般に、リニアモータ10が発生させる推力(トルク)は、「推力定数」とリニアモータ10に流れる「電流値」との積で算出される。この推力定数は、コイル104とマグネット103との正確な相対位置(磁極位置)が推定できた際の値であり、位相がずれるにしたがって見かけ上の推力定数は減少する。この関係はコサイン(余弦関数)となっており、位相が一致しているときに推力定数に応じた推力が得られ、移相が60度ずれると見かけ上の推力定数は半分となる。直流励磁により磁極位置の推定をした場合には、磁極位置に生じた誤差に応じて、推力定数通りの推力が得られないことがある。
これに対して、本実施形態のリニアモータ制御装置20は磁極位置の誤差を低減させることにより、リニアモータ10を駆動させる際の推力のばらつきを低減させることができる。また、リニアモータ装置1を起動するたびに、リニアモータ制御装置20は、磁極位置の補正を行うので、推定した磁極位置に含まれる誤差を低減し、また誤差のばらつきを抑えることができるので、安定した推力制御を行うことができる。
【0022】
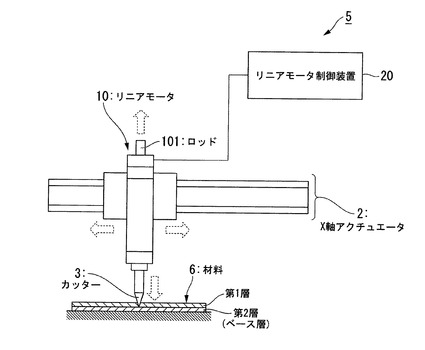
図6は、リニアモータ装置1を適用した加工装置の構成例を示す図である。
同図に示されているように、加工装置は、リニアモータ装置1と、X軸アクチュエータ2と、ロッド101の一端に取り付けられたカッター3と、X軸アクチュエータの可動方向に対して平行な主面を有する作業台4とから構成されている。リニアモータ10は、ロッド101が鉛直方向に移動するようにX軸アクチュエータ2に取り付けられ、X軸アクチュエータ2を駆動させることにより、リニアモータ10が作業台4の主面に対して平行に移動するようになっている。ロッド101の両端のうち下方の一端にはカッター3が取り付けられており、リニアモータ10の駆動に応じてカッター3が鉛直方向に上下移動するようになっている。
加工装置は、リニアモータ10とX軸アクチュエータ2とを駆動して、カッター3を移動させることにより、作業台4の主面上に配置されている材料6を加工する装置である。
【0023】
材料6が第1層と第2層(ベース層)とで構成されている場合に、加工装置を用いて第1層のみを切断する加工を行う場合、ベース層を傷つけずに第1層を切断するためには、精度の高い押し付け制御(推力制御)が求められる。すなわち、リニアモータ10を駆動させる際の推力にばらつきが少ないことが要求される。
これに対して、リニアモータ制御装置20は、推定する磁極位置に生じる誤差を低減させることにより、リニアモータ10を駆動させる際の推力に生じるばらつきを低減させて、精度の高い押し付け制御を行うことができるので、このような加工装置に好適である。
また、このような加工装置では、リニアモータ10のロッド101が鉛直方向に移動可能に設置されているため、直流励磁を行う際に重力による外乱を受けるので、推定する磁極位置に誤差が生じやすいが、図5に示した磁極位置の補正処理(制御方法)を用いることにより、推定した磁極位置の誤差を低減することができ、精度の高い押し付け制御を行うことができる。
【0024】
なお、本実施形態において、磁極位置の補正処理は電力の供給が開始された後に行う場合について説明したが、上位の装置からの要求に応じて補正処理を適宜行うようにしてもよい。
また、本実施形態では、リニアモータ制御装置20がロッドタイプのリニアモータ10を制御する場合について説明したが、可動子がU、V、W相のコイルを有し、固定子が可動方向に並べられた駆動用磁石を有するフラットタイプのリニアモータなどを制御してもよい。
【0025】
上述のリニアモータ制御装置20は内部に、コンピュータシステムを有していてもよい。その場合、上述した磁極位置を補正する処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われることになる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【符号の説明】
【0026】
1…リニアモータ装置、10…リニアモータ、20…リニアモータ制御装置、201…制御部、203…変流器
【技術分野】
【0001】
本発明は、リニアモータ制御装置、及び制御方法に関する。
【背景技術】
【0002】
リニア同期モータ(以下、リニアモータという。)は、可動子又は固定子のいずれか一方に設けられている複数のコイルと、可動子又は固定子のいずれか他方に設けられている駆動用磁石との相対的な位置関係(磁極位置)に応じた通電をしないと、予め定められている推力定数に応じたトルク(推力)を発生させることができない。リニアモータに備えられている可動子と固定子との磁極位置を検出するセンサなどを備えていない場合、同期モータの駆動を開始する際に初期磁極位置が不明であるため、初期磁極位置を検出する必要がある。
そこで、所定の磁極位置に対応した通電(直流励磁)を行うことにより、可動子を所定の磁極位置に引き込むことで、初期磁極位置を推定している。
【0003】
しかし、直流励磁を用いて初期磁極位置を推定する場合、可動子の位置や可動子が移動する際に生じる摩擦などにより、可動子を初期磁極位置に引き込むことができない場合がある。この場合、推定した初期磁極位置と、実際の可動子の磁極位置とに差が生じてしまい、推定した初期磁極位置に誤差が生じることになる。誤差を含む磁極位置に基づいてリニアモータを制御すると、要求されるトルクを発生させることができないという問題がある。また、リニアモータを起動させる都度、磁極位置に含まれる誤差が変化すると、リニアモータが発生させるトルクにばらつきが生じてしまうという問題がある。
これに対して、直流励磁を行うとともに、その際の可動子の移動量を用いて初期磁極位置を推定する精度を向上させる技術が検討されている(特許文献1)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−049831号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術では、可動子の移動量を検出するセンサを用いる必要があるため、次の問題がある。移動量を検出するセンサをリニアモータに取り付けるための場所を確保する必要があるため、リニアモータを設計する際の自由度が低下する。また、センサに附随するアナログ回路やケーブル等の実装が必要になる。また、アナログ回路やケーブル等を必要とするため、リニアモータの製造コストが増加する。
【0006】
本発明は、上記問題を解決すべくなされたもので、その目的は、可動子の位置や移動量を検出するセンサを設けることなく、推定する磁極位置に含まれる誤差のばらつきを低減できるリニアモータ制御装置、及び制御方法を提供することにある。
【課題を解決するための手段】
【0007】
上記問題を解決するために、本発明は、可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置であって、予め定められた磁極位置に対応する電圧を前記複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、前記可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、前記可動子が前記基準位置に達したと判定した際に、前記基準位置に対応する磁極位置を現在の磁極位置にする制御部を備えることを特徴とするリニアモータ制御装置である。
【0008】
また、上記問題を解決するために、本発明は、可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの制御方法であって、予め定められた磁極位置に対応する電圧を前記複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、前記可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、前記可動子が前記基準位置に達したと判定した際に、前記基準位置に対応する磁極位置を現在の磁極位置にする制御ステップを有することを特徴とする制御方法である。
【発明の効果】
【0009】
この発明によれば、例えば直流励磁を行った後に、リニアモータの可動子を可動子の可動範囲内の予め定められた基準位置に移動させる。基準位置では、コイルと駆動用磁石との位置関係が一意に定まるので、基準位置に可動子を移動させた際の磁極位置を、基準位置に対応する磁極位置に変更する補正を行うことにより、磁極位置を推定するたびに生じる誤差を低減させるとともに、誤差のばらつきを抑えることができる。磁極位置を推定する際の誤差の低減、及び誤差のばらつきを抑えることにより、推定の精度を向上させることができ、リニアモータが発生させるトルクを安定させることができる。
【図面の簡単な説明】
【0010】
【図1】本実施形態におけるリニアモータ装置1の構成を示す概略ブロック図である。
【図2】本実施形態におけるリニアモータ10の斜視図(一部断面図)である。
【図3】本実施形態におけるコイルホルダ105に保持されたコイルユニットを示す斜視図である。
【図4】本実施形態におけるリニアモータ10のマグネット103とコイル104の位置関係を示す図である。
【図5】本実施形態における磁極位置を補正する処理を示すフローチャートである。
【図6】リニアモータ装置1を適用した加工装置の構成例を示す図である。
【発明を実施するための形態】
【0011】
以下、図面を参照して、本発明の実施形態におけるリニアモータ制御装置、及び制御方法を説明する。
図1は、本実施形態におけるリニアモータ装置1の構成を示す概略ブロック図である。同図に示されているように、リニアモータ装置1は、ロッドタイプのリニアモータ10と、リニアモータ10を制御するリニアモータ制御装置20とを具備している。
【0012】
図2は、本実施形態におけるリニアモータ10の斜視図(一部断面図)である。リニアモータ10は、コイル収容ケース102に対してロッド101が軸線方向に移動する。
コイル収容ケース102内には、コイルホルダ105に保持された複数のコイル104が積層(配列)されている。コイル収容ケース102の両端面それぞれには、エンドケース109が取り付けられている。エンドケース109には、ロッド101の直線運動を案内するための軸受けであるブッシュ108が取り付けられている。
【0013】
ロッド101は、例えばステンレス等の非磁性材からなり、パイプのように中空の空間を有する。ロッド101の中空空間には、円柱状の複数のマグネット103(セグメント磁石)が互いに同極を対向させて積層されている。すなわち各マグネット103は、隣接するマグネット103の一方とN極同士を対向させ、隣接するマグネット103の他方とS極同士を対向させて積層されている。マグネット103の間には、例えば鉄等の磁性体からなるポールシュー107(磁極ブロック)が介在されている。ロッド101は、積層されたコイル104内を貫通するとともに、コイル収容ケース102に軸線方向に移動可能に支持されている。また、ロッド101の両端にはエンドストッパ110が取り付けられており、ロッド101が可動範囲を超えて移動しないようになっている。
【0014】
図3は、本実施形態におけるコイルホルダ105に保持されたコイルユニットを示す斜視図である。同図に示されるように、コイル104は銅線を螺旋状に巻いたもので、コイルホルダ105に保持されている。すなわち、複数のコイル104は、ロッド101のマグネット103が配列されている方向を中心として、ロッド101の外周に沿って銅線が巻かれたものであり、各コイル104がマグネット103の配列されている方向と同じ方向に配列されている。
隣接するコイル104を絶縁させる必要があるので、コイル104間にはリング状の樹脂製スペーサ105aが介在される。コイルホルダ105上にはプリント基板106が設けられる。コイル104の巻線の端部104aは、プリント基板106に結線される。
【0015】
本実施形態では、コイル104及びコイルホルダ105を金型にセットし、溶融した樹脂又は特殊セラミックスを金型内に注入するインサート成形によって、コイル収容ケース102をコイル104と一体に成形する。図2に示されるように、コイル収容ケース102には、コイル104の放熱性を高めるためにフィン102aが複数形成される。なお、コイルホルダ105に保持されたコイル104をアルミ製のコイル収容ケース102に収納し、コイル104とコイル収容ケース102との間のすきまを接着剤で埋めて、コイル104及びコイルホルダ105をコイル収容ケース102に固定してもよい。
【0016】
図4は、本実施形態におけるリニアモータ10のマグネット103とコイル104の位置関係を示す図である。ロッド101内の中空空間には、円柱状の複数のマグネット103(セグメント磁石)が互いに同極が対向するように配列される。コイル104は3つでU・V・W相からなる一組の三相コイルとなる。一組の三相コイルを複数組み合わせて、コイルユニットが構成される。U・V・W相の三相に分けた複数のコイル104に120°ずつ位相が異なる三相電流を流すと、コイル104の軸線方向に移動する移動磁界が発生する。ロッド101は、駆動用磁石としての各マグネット103が生じさせている磁界と、移動磁界との作用により推力を得て、移動磁界の速さに同期してコイル104に対して相対的に直線運動を行う。
【0017】
図1に戻って、リニアモータ制御装置20の構成について説明する。
リニアモータ制御装置20は、制御部201と、電力変換器202と、変流器203と、補正値記憶部204とを備えている。制御部201は、上位の装置から制御開始信号が入力されると、リニアモータ10の初期磁極位置の推定、及び原点復帰処理を行う。また、制御部201は、上位の装置から入力される位置指令信号と、リニアモータ10のU、V、W相それぞれのコイル104に流れる電流値とに基づいて、U、V、W相それぞれのコイルに印加する電圧を算出する。また、制御部201は、算出した電圧を示す電圧指令信号を電力変換器202に出力する。
電力変換器202は、制御部201から入力される電圧指令信号に応じた電圧をリニアモータ10のU、V、W相それぞれのコイル104に印加する。変流器203は、電力変換器202とリニアモータ10とを接続している電力線に取り付けられており、当該電力線に流れている電流値を測定し、測定結果を制御部201に出力する。
補正値記憶部204には、原点復帰処理を行った際に磁極位置を補正する補正値が記憶されている。具体的には、リニアモータ10のロッド101が予め定められた基準位置にある場合における磁極位置が補正値として補正値記憶部204に記憶されている。補正値記憶部204に記憶されている磁極位置は、例えば、2つのエンドストッパ110のうちいずれか一方がエンドケース109に接触しているときの磁極位置と、エンドストッパ110のうちいずれか他方がエンドケース109に接触しているときの磁極位置とである。この場合、基準位置は、エンドストッパ110とエンドケース109とが接触している位置、すなわち可動範囲の両端である。
【0018】
図5は、本実施形態における磁極位置を補正する処理を示すフローチャートである。
制御部201は、例えば電力の供給が開始された後などに、制御開始信号が入力されると、予め定められた磁極位置に対応する位相差を有する電圧(直流励磁)をU、V、W相それぞれのコイル104に印加し、予め定められた磁極位置にロッド101を引き込む(ステップS11)。
制御部201は、予め定められた磁極位置にロッド101が位置するものとみなして、可動範囲の両端のうち予め定めた一方の端に向けてロッド101を移動させる制御を原点復帰処理として行う(ステップS12)。すなわち、制御部201は、ロッド101の一端に取り付けられているエンドストッパ110とエンドケース109とが接触するまで、ロッド101を移動させる制御を行う。
【0019】
制御部201は、リニアモータ10のU、V、W相それぞれに流れる電流の電流値のいずれかが予め定められた電流閾値以上であるか否かを判定し(ステップS13)、すべての電流値が電流閾値未満の場合(ステップS13:NO)、U、V、W相に流れる電流のいずれかが電流閾値以上になるまで、判定を繰り返し行う。
一方、U、V、W相に流れる電流のいずれかが電流閾値以上になった場合(ステップS13:YES)、制御部201は、ロッド101が可動範囲の一方の端に到達したと判定し、当該端に対応する磁極位置(補正値)を補正値記憶部204から読み出し、ロッド101の現在の磁極位置を読み出した磁極位置に変更する補正を行い(ステップS14)、磁極位置を補正する処理を終了する。
なお、ステップS13における電流閾値は、実機を用いた測定結果やシミュレーションの結果に基づいて定められる。
【0020】
本実施形態のリニアモータ制御装置20は、電力の供給が開始された直後においてロッド101の磁極位置が不明な状態から、直流励磁によりロッド101を予め定められた磁極位置に引き込み、ロッド101の初期磁極位置を予め定められた磁極位置とみなしてリニアモータ10の駆動を開始させる。また、リニアモータ制御装置20は、ロッド101の絶対位置を検出するために可動範囲の一方の端までロッド101を移動させる。このとき、リニアモータ制御装置20は、現在の磁極位置を可動範囲の一方の端に対応する磁極位置に補正することで、直流励磁の際に推定した初期磁極位置に対して生じる誤差を補正し、磁極位置のばらつきを補正する。
直流励磁によるロッド101の引き込みにより初期磁極位置を推定する場合、ロッド101に加わる摩擦等により初期磁極位置に誤差が生じることがある。これに対して、可動範囲の一方の端までロッド101を移動させた際の磁極位置はロッド101内に設けられているマグネット103と、コイル104との位置関係により一意に決まるため、推定する磁極位置の誤差を低減させることができる。
更に、リニアモータ制御装置20は、ロッド101を動かす際に要するトルクが大きくなるとコイル104に流れる電流値が大きくなることを利用して、ロッド101が可動範囲の端に達したか否かを判定している。これにより、ロッド101(可動子)の位置を検出するセンサ等を設けることなく、ロッド101が可動範囲の端に達したか否かを検出することができ、ロッド101の磁極位置を推定する精度を向上させることができる。
また、リニアモータ制御装置20が備える制御部201をマイクロコントローラ等で実装する場合、直流励磁を用いて磁極位置を推定する装置構成に対してハードウエアの追加をすることなく、図5に示した制御方法を実装できるので、製造コストを増加させることなく、磁極位置の推定精度を向上させることができる。また、センサレス制御を行うリニアモータ10では、原点復帰が必ず行われるため、ユーザに時間的な負担を強いることなく磁極位置の補正を行うことができる。
【0021】
一般に、リニアモータ10が発生させる推力(トルク)は、「推力定数」とリニアモータ10に流れる「電流値」との積で算出される。この推力定数は、コイル104とマグネット103との正確な相対位置(磁極位置)が推定できた際の値であり、位相がずれるにしたがって見かけ上の推力定数は減少する。この関係はコサイン(余弦関数)となっており、位相が一致しているときに推力定数に応じた推力が得られ、移相が60度ずれると見かけ上の推力定数は半分となる。直流励磁により磁極位置の推定をした場合には、磁極位置に生じた誤差に応じて、推力定数通りの推力が得られないことがある。
これに対して、本実施形態のリニアモータ制御装置20は磁極位置の誤差を低減させることにより、リニアモータ10を駆動させる際の推力のばらつきを低減させることができる。また、リニアモータ装置1を起動するたびに、リニアモータ制御装置20は、磁極位置の補正を行うので、推定した磁極位置に含まれる誤差を低減し、また誤差のばらつきを抑えることができるので、安定した推力制御を行うことができる。
【0022】
図6は、リニアモータ装置1を適用した加工装置の構成例を示す図である。
同図に示されているように、加工装置は、リニアモータ装置1と、X軸アクチュエータ2と、ロッド101の一端に取り付けられたカッター3と、X軸アクチュエータの可動方向に対して平行な主面を有する作業台4とから構成されている。リニアモータ10は、ロッド101が鉛直方向に移動するようにX軸アクチュエータ2に取り付けられ、X軸アクチュエータ2を駆動させることにより、リニアモータ10が作業台4の主面に対して平行に移動するようになっている。ロッド101の両端のうち下方の一端にはカッター3が取り付けられており、リニアモータ10の駆動に応じてカッター3が鉛直方向に上下移動するようになっている。
加工装置は、リニアモータ10とX軸アクチュエータ2とを駆動して、カッター3を移動させることにより、作業台4の主面上に配置されている材料6を加工する装置である。
【0023】
材料6が第1層と第2層(ベース層)とで構成されている場合に、加工装置を用いて第1層のみを切断する加工を行う場合、ベース層を傷つけずに第1層を切断するためには、精度の高い押し付け制御(推力制御)が求められる。すなわち、リニアモータ10を駆動させる際の推力にばらつきが少ないことが要求される。
これに対して、リニアモータ制御装置20は、推定する磁極位置に生じる誤差を低減させることにより、リニアモータ10を駆動させる際の推力に生じるばらつきを低減させて、精度の高い押し付け制御を行うことができるので、このような加工装置に好適である。
また、このような加工装置では、リニアモータ10のロッド101が鉛直方向に移動可能に設置されているため、直流励磁を行う際に重力による外乱を受けるので、推定する磁極位置に誤差が生じやすいが、図5に示した磁極位置の補正処理(制御方法)を用いることにより、推定した磁極位置の誤差を低減することができ、精度の高い押し付け制御を行うことができる。
【0024】
なお、本実施形態において、磁極位置の補正処理は電力の供給が開始された後に行う場合について説明したが、上位の装置からの要求に応じて補正処理を適宜行うようにしてもよい。
また、本実施形態では、リニアモータ制御装置20がロッドタイプのリニアモータ10を制御する場合について説明したが、可動子がU、V、W相のコイルを有し、固定子が可動方向に並べられた駆動用磁石を有するフラットタイプのリニアモータなどを制御してもよい。
【0025】
上述のリニアモータ制御装置20は内部に、コンピュータシステムを有していてもよい。その場合、上述した磁極位置を補正する処理の過程は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われることになる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【符号の説明】
【0026】
1…リニアモータ装置、10…リニアモータ、20…リニアモータ制御装置、201…制御部、203…変流器
【特許請求の範囲】
【請求項1】
可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置であって、
予め定められた磁極位置に対応する電圧を前記複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、前記可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、前記可動子が前記基準位置に達したと判定した際に、前記基準位置に対応する磁極位置を現在の磁極位置にする制御部
を備えることを特徴とするリニアモータ制御装置。
【請求項2】
前記複数のコイルに流れる電流値を測定する変流器を更に備え、
前記制御部は、
前記可動子を前記基準位置に移動させる制御を行っている間に、前記変流器が測定した電流値が予め定められた電流閾値以上である場合に、前記可動子が前記基準位置に達したと判定する
ことを特徴とする請求項1に記載のリニアモータ制御装置。
【請求項3】
可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの制御方法であって、
予め定められた磁極位置に対応する電圧を前記複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、前記可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、前記可動子が前記基準位置に達したと判定した際に、前記基準位置に対応する磁極位置を現在の磁極位置にする制御ステップ
を有することを特徴とする制御方法。
【請求項1】
可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの駆動を制御するリニアモータ制御装置であって、
予め定められた磁極位置に対応する電圧を前記複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、前記可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、前記可動子が前記基準位置に達したと判定した際に、前記基準位置に対応する磁極位置を現在の磁極位置にする制御部
を備えることを特徴とするリニアモータ制御装置。
【請求項2】
前記複数のコイルに流れる電流値を測定する変流器を更に備え、
前記制御部は、
前記可動子を前記基準位置に移動させる制御を行っている間に、前記変流器が測定した電流値が予め定められた電流閾値以上である場合に、前記可動子が前記基準位置に達したと判定する
ことを特徴とする請求項1に記載のリニアモータ制御装置。
【請求項3】
可動子又は固定子のいずれか一方が複数のコイルを有し、可動子又は固定子のいずれか他方が駆動用磁石を有しているリニアモータの制御方法であって、
予め定められた磁極位置に対応する電圧を前記複数のコイルに印加して初期磁極位置を推定し、推定した初期磁極位置に基づいて、前記可動子を可動範囲内の予め定められた基準位置に移動させる制御を行い、前記可動子が前記基準位置に達したと判定した際に、前記基準位置に対応する磁極位置を現在の磁極位置にする制御ステップ
を有することを特徴とする制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−115878(P2013−115878A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257946(P2011−257946)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(390029805)THK株式会社 (420)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(390029805)THK株式会社 (420)
【Fターム(参考)】
[ Back to top ]