
リニアモータ
【課題】センサを好適に配置できるリニアモータを提供する。
【解決手段】リニアモータ1は、駆動方向(x方向)に直交する方向(z方向)に磁極を向けるとともに磁極の向きを交互に逆転させながらx方向に配列された複数の磁石19と、複数の磁石19に対してz方向に位置し、複数の磁石19に対してx方向に移動可能なコイル21と、z方向に見てコイル21の配置領域と重なる位置にて、コイル21に対して固定的に設けられた磁気感応素子23と、z方向に見てコイル21の配置領域と重ならない位置にて、コイル21に対して固定的に設けられ、磁気感応素子23へ電力を供給する又は磁気感応素子23からの信号を増幅するための周辺部品31とを有している。
【解決手段】リニアモータ1は、駆動方向(x方向)に直交する方向(z方向)に磁極を向けるとともに磁極の向きを交互に逆転させながらx方向に配列された複数の磁石19と、複数の磁石19に対してz方向に位置し、複数の磁石19に対してx方向に移動可能なコイル21と、z方向に見てコイル21の配置領域と重なる位置にて、コイル21に対して固定的に設けられた磁気感応素子23と、z方向に見てコイル21の配置領域と重ならない位置にて、コイル21に対して固定的に設けられ、磁気感応素子23へ電力を供給する又は磁気感応素子23からの信号を増幅するための周辺部品31とを有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁極センサ等のセンサを有するリニアモータに関する。
【背景技術】
【0002】
磁極センサ等のセンサを有するリニアモータが知られている(例えば特許文献1)。特許文献1のリニアモータは、複数のコイルと、複数のコイルと相対的に移動可能な複数の磁石と、複数のコイルに対して固定的に設けられた磁気センサとを有している。磁気センサは、センサ基板に2つのホール素子が実装されて構成され、駆動方向において複数のコイルから離間した位置に配置されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−252532号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のような構成では、リニアモータの駆動方向における大型化を招くおそれがある。例えば、コイル側の構成は、駆動方向においてコイルとセンサ基板との双方の大きさを必要とする。また、センサが磁石の磁気を検出するものである場合においては、コイルとセンサとの双方が常に磁石に対向する必要性から、磁石側の構成も駆動方向において大型化する(磁石列の一端には、センサのみに対向し得る磁石が設けられ、磁石列の他端には、コイルのみに対向し得る磁石が設けられる)。
【0005】
本発明の目的は、センサを好適に配置できるリニアモータを提供することにある。
【課題を解決するための手段】
【0006】
本発明のリニアモータは、駆動方向に直交する方向に磁極を向けるとともに磁極の向きを交互に逆転させながら前記駆動方向に配列された複数の磁石と、前記複数の磁石に対して前記直交する方向に位置し、前記複数の磁石に対して前記駆動方向に移動可能なコイルと、前記直交する方向に見て前記コイルの配置領域と重なる位置にて、前記コイルに対して固定的に設けられたセンサ素子と、前記直交する方向に見て前記コイルの配置領域と重ならない位置にて、前記コイルに対して固定的に設けられ、前記センサ素子へ電力を供給する又は前記センサ素子からの信号を増幅するための周辺部品と、を有する。
【0007】
好適には、前記コイルは、3相交流電力の供給により前記駆動方向に移動可能に前記駆動方向に複数配列されており、前記センサ素子は、磁気感応素子である。
【0008】
好適には、前記リニアモータは、前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、前記センサ素子が実装され、前記コイルに固定された素子基板と、前記周辺部品が実装され、前記延在部に固定された周辺回路基板と、前記素子基板と前記周辺回路基板とを接続する可撓性のケーブルと、を有する。
【0009】
好適には、前記素子基板は、前記コイルと前記複数の磁石と間において、前記直交する方向に面するように前記コイルに固定されており、前記周辺回路基板は、前記直交する方向に面するように前記延在部に固定されており、前記ケーブルは、一端が前記素子基板の面に重ねられて実装され、他端が前記周辺回路基板の面に重ねられて実装されたフレキシブルフラットケーブルである。
【0010】
好適には、前記素子基板は、前記センサ素子が実装された面を前記複数の磁石側に向けて前記コイルに固定されており、前記保持部は、前記コイル及び前記素子基板と、前記複数の磁石との間に位置し、前記直交する方向に面する板状部を有し、前記板状部には、前記センサ素子を収容する空所が形成されている。
【0011】
好適には、前記リニアモータは、前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、前記センサ素子が実装され、前記コイルに固定された素子部と、前記周辺部品が実装され、前記延在部に固定された周辺回路部と、前記素子部と前記周辺回路部とを接続する接続部とを有するフレキシブル基板と、を有する。
【0012】
好適には、前記リニアモータは、前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、前記センサ素子が実装され、前記コイルに固定された素子部と、前記素子部から延在する接続部とを有するフレキシブル基板と、前記周辺部品が実装され、前記延在部に固定され、前記接続部と接続された周辺回路基板と、を有する。
【発明の効果】
【0013】
上記の構成によれば、センサを好適に配置できる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1の実施形態に係るリニアモータの外観を示す斜視図。
【図2】図1のリニアモータの一部を取り外して示す斜視図。
【図3】図1のIII−III線における断面図。
【図4】図1のリニアモータの磁気センサを示す平面図。
【図5】本発明の第2の実施形態に係るリニアモータの断面図。
【図6】図5のリニアモータの磁気センサを示す平面図。
【図7】本発明の第3の実施形態に係るリニアモータの断面図。
【図8】図7のリニアモータの磁気センサを示す平面図。
【発明を実施するための形態】
【0015】
(第1の実施形態)
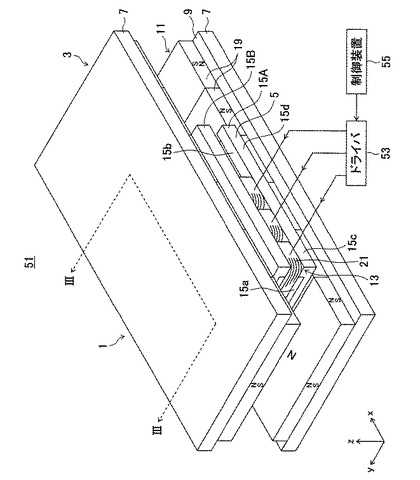
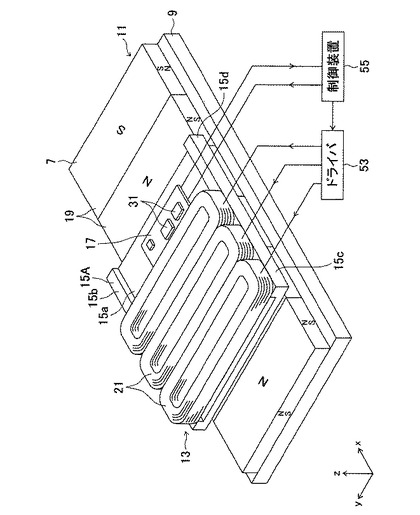
図1は、本発明の第1の実施形態に係るリニアモータ装置51の外観を示す斜視図である。図2は、リニアモータ装置51の一部を取り外して示す斜視図である。
【0016】
リニアモータ装置51は、リニアモータ1と、リニアモータ1を駆動するためのドライバ53及び制御装置55とを有している。
【0017】
リニアモータ1は、x方向に駆動力を発揮するリニアモータである。すなわち、リニアモータ1は、固定子3(図1)と、固定子3に対してx方向へ駆動される可動子5(図1)とを有している。なお、可動子5は、不図示の支持機構及び/又は不図示の駆動対象によって、固定子3に対してx方向に移動可能に支持されている。
【0018】
固定子3は、z方向において互いに対向して配置された1対の固定子構成部材7を有している。なお、固定子構成部材7それぞれが固定子と捉えられてもよい。1対の固定子構成部材7は、不図示の固定部材及び/又は不図示の駆動対象によって、互いに固定されている。
【0019】
各固定子構成部材7は、ヨーク9と、ヨーク9に取り付けられた磁石列11とを有している。可動子5は、コイル列13と、コイル列13を保持する1対の固定部材15A,15B(以下、A,Bを省略することがある。)と、コイル列13の磁石列11に対する位置を検出するための磁気センサ17(図2)とを有している。
【0020】
ヨーク9は、例えば、z方向に面し、x方向に延びる、概ね矩形の平板状に形成されている。また、ヨーク9は、例えば、鉄等の磁性体により形成されている。
【0021】
磁石列11は、複数の磁石19によって構成されている。複数の磁石19は、互いに同一の構成とされている。各磁石19は、例えば、長方形の平板状に形成されており、その厚み方向において着磁されている。そして、複数の磁石19は、磁極(平板の面)をz方向に向け、長手方向をy方向とし、磁極を交互に逆転させながら、x方向に配列されている。なお、複数の磁石19は、ネジ若しくは接着剤等の適宜な方法によりヨーク9に対して固定されている。2つの磁石列11は、例えば、z方向において互いに異なる磁極を対向させている。
【0022】
このような固定子3においては、可動子5側に向くN極から出た磁束は、当該N極にz方向において対向するS極に入る。また、ヨーク9側に向くN極から出た磁束は、ヨーク9を介して、当該N極にx方向において隣接するS極に入る。
【0023】
コイル列13は、3つ以上(本実施形態では3つ)のコイル21によって構成されている。複数のコイル21は、互いに同一の構成とされている。各コイル21は、銅等の導線が絶縁被膜により被覆されて構成された線材が複数回巻き回されて構成されている。その全体形状は、例えば、軸方向において扁平で、平面視における(軸方向に見た)形状が概ね長方形(若しくは長円形)に形成されている。そして、複数のコイル21は、軸方向をz方向に向け、長手方向をy方向とし、x方向に配列されている。x方向の所定長さにおける、コイル21の数と磁石19の数との比は、例えば、3:2とされている。
【0024】
従って、コイル21に電力を供給すると、コイル21のy方向に延びる部分を流れる電流が磁石19のz方向への磁束に交差し、フレミングの左手の法則に従ってx方向の駆動力が生じる。そして、互いに隣接する3つのコイル21に対して3相交流電力を供給することにより、コイル列13は、3相交流電力の周波数に比例(同期)した速度でx方向へ移動する。なお、U相(若しくは−U相)、V相(若しくは−V相)及びW相(若しくは−W相)の電力が供給される3つのコイル21のx方向における並び順は、公知の並び順と同様でよい。
【0025】
固定部材15は、コイル21の保持及びコイル21の駆動力を不図示の駆動対象部材に伝達する機能を果たすためのものである。2つの固定部材15は、概ね(後述する空所15hを除き)、互いに同一の構成とされている。固定部材15は、板状部15aと、板状部15aからコイル列13側に突出し、x方向に延びる突条部15bとを有している。別の観点では、固定部材15は、コイル列13を保持する保持部15cと、保持部15cからz方向に見てコイル列13の外側へ延び出る延在部15dとを有している。固定部材15は、非磁性材料、例えば、炭素繊維強化プラスチック(CFRP)により形成されている。なお、固定部材15A及び固定部材15Bは、互いに固定されるから、双方を含んで一つの部材として概念化されてもよい。
【0026】
コイル21は、固定部材15に対してコイル21の軸方向が板状部15aに直交するように配置され、保持部15cにおける突条部15bに対して接着剤により固定されている。そして、固定部材15は、コイル21が固定された側とは反対側の面をz方向において磁石列11に対向させて配置される。換言すれば、固定部材15は、コイル21と磁石列11との間に位置している。なお、コイル21と板状部15aとの間には隙間が生じている。固定部材15は、適宜な位置において不図示の駆動対象部材と連結される。
【0027】
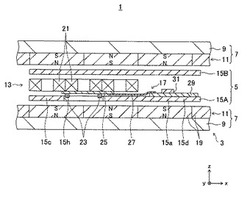
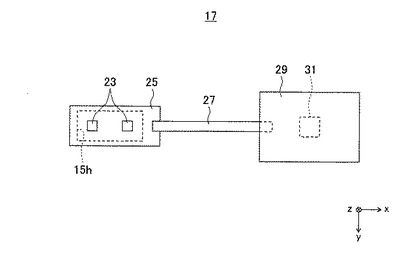
図3は、図1のIII−III線における断面図である。また、図4は、磁気センサ17の平面図である。
【0028】
磁気センサ17は、2つの磁気感応素子23と、磁気感応素子23が実装された素子基板25と、素子基板25に接続されたケーブル27と、ケーブル27を介して素子基板25と接続された周辺回路基板29と、周辺回路基板29に実装された周辺部品31とを有している。
【0029】
磁気感応素子23は、例えば、ホール素子により構成されており、自己の位置における磁界の強さ及び磁界の向きに応じた信号レベル(例えば電圧)の信号を出力する。例えば、磁界が大きいほど信号レベルの絶対値は大きくなり、磁界の向きに応じて信号レベルの正負が変化する。2つの磁気感応素子23は、x方向において、互いに離間して配置されている。その間隔は、例えば、1対の磁石19のx方向の長さの1/4(1つの磁石19のx方向の長さの1/2)である。
【0030】
従って、磁気感応素子23は、複数の磁石19に対してx方向に移動すると、1対の磁石19の、x方向の長さを1周期(2π)とする正弦波(余弦波)の信号を生成する。また、2つの磁気感応素子23がx方向の一方へ移動するときには、他方の磁気感応素子23の信号が一方の磁気感応素子23の信号に対して1/4周期で遅れ、2つの磁気感応素子23がx方向の他方へ移動するときには、一方の磁気感応素子23の信号が他方の磁気感応素子23の信号に対して1/4周期で遅れる。換言すれば、2つの磁気感応素子23の信号の信号レベルの組み合わせと、2つの磁気感応素子23の1対の磁石19に対する位置とは、一義的に定まる。
【0031】
素子基板25は、リジッド式のプリント配線板により構成されている。プリント配線板は、1層板(片面板)であってもよいし、2層板(両面板)であってもよいし、多層板であってもよい。例えば、素子基板25は、一方の面においては、磁気感応素子23等を実装可能に導電層が露出しており、他方の面はその全面が絶縁層により構成されている。なお、素子基板25の基材、絶縁材料、及び導電材料は適宜な材料から選択されてよい。
【0032】
素子基板25の一方の面には、磁気感応素子23が実装されている。実装は、例えば、はんだ若しくは導電性樹脂を用いた表面実装である。素子基板25は、磁気感応素子23が実装された面とは反対側の面をコイル列13に向けてコイル列13に対して固定されている。固定は、例えば、接着剤によりなされている。
【0033】
従って、磁気感応素子23は、z方向に見て、コイル21の配置領域と重なる位置にて、コイル21に対して固定的に設けられている。なお、本願では、「コイルの配置領域」は、コイル及びその開口を含む領域をいうものとする。また、「固定的に設けられている」は、直接固定されていてもよいし、他の部材を介して間接的に固定されていてもよいことを意味するものとする。
【0034】
なお、コイル21と素子基板25との間には、これらの絶縁性を高めるためにガラスエポキシ樹脂等の絶縁性材料からなる、膜、平板若しくはシートを介在させてもよい。ただし、当該膜、平板若しくはシートは素子基板25の一部と捉えられてもよい。
【0035】
ケーブル27は、例えば、フレキシブルフラットケーブルにより構成されている。従って、ケーブル27は、薄型であるとともに、可撓性を有している。ケーブル27の一端は、素子基板25の、磁気感応素子23が実装された面に重ねられ、はんだを介して素子基板25の導電層に接続されている。また、ケーブル27の他端は、周辺回路基板29の、周辺部品31が実装された面に重ねられ、はんだを介して周辺回路基板29の導電層に接続されている。
【0036】
周辺回路基板29は、リジッド式のプリント配線板により構成されている。プリント配線板は、1層板(片面板)であってもよいし、2層板(両面板)であってもよいし、多層板であってもよい。例えば、周辺回路基板29は、一方の面においては、周辺部品31等を実装可能に導電層が露出しており、他方の面はその全面が絶縁層により構成されている。なお、周辺回路基板29の基材、絶縁材料、及び導電材料は適宜な材料から選択されてよい。
【0037】
周辺回路基板29の一方の面には、周辺部品31が実装されている。実装は、例えば、はんだ若しくは導電性樹脂を用いた表面実装である。周辺回路基板29は、周辺部品31が実装された面とは反対側の面を、固定部材15Aの延在部15dの板状部15aに向けて当該板状部15aに対して固定されている。固定は、例えば、接着剤によりなされている。
【0038】
従って、周辺部品31は、z方向に見て、コイル21の配置領域と重ならない位置にて、コイル21に対して固定的に設けられている。
【0039】
なお、周辺回路基板29と板状部15aとの間には、これらの絶縁性を高めるためにガラスエポキシ樹脂等の絶縁性材料からなる、膜、平板若しくはシートを介在させてもよい。ただし、当該膜、平板若しくはシートは周辺回路基板29若しくは固定部材15の一部と捉えられてもよい。
【0040】
また、周辺回路基板29は、不図示のケーブルを介して制御装置55と接続されている。当該ケーブルは、例えば、周辺回路基板29の、周辺部品31が実装された面に実装された不図示のコネクタを介して周辺回路基板29に接続されている。
【0041】
周辺部品31は、例えば、磁気感応素子23に電力を供給したり、磁気感応素子23からの信号を増幅したり、磁気感応素子23からのアナログ信号をデジタル化したりするための周辺回路を構成するためのものである。なお、周辺部品31は、それ単体で、ドライバ若しくは増幅器等として機能する部品であってもよいし、周辺回路基板29及び他の周辺部品31と共に、ドライバ若しくは増幅器等を構成するものであってもよい。
【0042】
磁気センサ17の各部材の寸法は適宜に設定されてよい。例えば、素子基板25は、周辺回路基板29よりも薄い。また、素子基板25及び磁気感応素子23の全体の厚みも、周辺回路基板29及び周辺部品31の全体の厚みよりも薄い。また、ケーブル27は素子基板25よりも薄い。一例として、周辺回路基板29の厚みは1.6mm程度であり、素子基板25の厚みは0.2mm程度であり、磁気感応素子23の厚みは1mm程度である。
【0043】
図3に示すように、固定部材15Aの板状部15aには、磁気感応素子23を収容可能な空所15hが形成されている。空所15hは、孔、切り欠き若しくは凹部により構成されている(本実施形態では孔)。図4において点線で示すように、空所15hは、素子基板25の面積よりも小さく形成されている。
【0044】
図2に戻って、制御装置55は、例えば、CPU、ROM、RAM及び外部記憶装置を含んで構成されており、予め定められたシーケンスに従って若しくは不図示の入力装置からの信号に従って、ドライバ53に制御信号を出力する。ドライバ53は、制御信号に応じた周波数、位相及び電圧の電力を複数のコイル21に供給する。
【0045】
また、制御装置55は、複数の周辺部品31のうち駆動部品に磁気感応素子23への電力供給を指示するとともに、複数の周辺部品31のうち増幅器からの信号を受け取る。そして、制御装置55は、磁気センサ17からの信号に基づいてコイル21と磁石19の磁極との相対位置を特定し、その相対位置に応じて3相交流電力の位相を決定し、その位相の情報を含む、ドライバ53への制御信号を生成する。
【0046】
なお、リニアモータ1は、以上に説明した他、例えば、可動子5の固定子3に対する位置を特定するためのリニアエンコーダを備え、制御装置55は、当該リニアエンコーダの信号に基づいて位置制御及び/又は速度制御を行ってもよい。
【0047】
以上のとおり、本実施形態では、リニアモータ1は、駆動方向(x方向)に直交する方向(z方向)に磁極を向けるとともに磁極の向きを交互に逆転させながらx方向に配列された複数の磁石19と、複数の磁石19に対してz方向に位置し、複数の磁石19に対してx方向に移動可能なコイル21と、z方向に見てコイル21の配置領域と重なる位置にて、コイル21に対して固定的に設けられた磁気感応素子23と、z方向に見てコイル21の配置領域と重ならない位置にて、コイル21に対して固定的に設けられ、磁気感応素子23へ電力を供給する又は磁気感応素子23からの信号を増幅するための周辺部品31とを有している。
【0048】
すなわち、従来のリニアモータにおいては、磁気センサは、磁気感応素子23及び周辺部品31の全体が1部品として概念され、リニアモータ本体に対する取り付け位置が設計されていたところ、本実施形態においては、磁気センサを1部品として捉えるのではなく、磁気感応素子23及び周辺部品31を別々の部品として概念化して、リニアモータ本体に融合させている。具体的には、相対的に厚みが小さくなる傾向にある磁気感応素子23(及び素子基板25)をコイル21に重なる位置に配置し、相対的に厚みが大きくなる傾向にある周辺部品31(及び周辺回路基板29)をコイル21に重ならない位置に配置していることから、特許文献1に比較して少なくともx方向において小型化され、また、全体としての小型化も期待される。なお、このような配置は、磁気センサの製造業者から磁気感応素子及び周辺部品を含む磁気センサを購入してリニアモータ本体に取り付けているリニアモータの製造業者、若しくは、シビアな小型化が要求されない大型のリニアモータの開発者においては想到することが困難である。なお、周辺回路基板29がコイル21と重ならない位置に配置されることによって、コイル21からの熱が周辺回路基板29に伝達されることが抑制される効果も期待される。
【0049】
コイル21は、3相交流電力の供給により駆動方向(x方向)に移動可能にx方向に複数配列されており、上記のように配置されるセンサ素子(23)は、磁気感応素子である。
【0050】
この場合、磁石列11を短くできることから、リニアモータ1の小型化が顕著となる。すなわち、磁気感応素子23が周辺回路基板29に実装されているとすれば、磁気感応素子23が常に磁石列11に対向する必要性から、磁石列11は、コイル列13がx方向の正側の可動限に位置したときに、磁気感応素子23と対向する磁石19(この磁石19は、コイル列13の可動範囲外に位置し、コイル列13とは対向しない)を有する必要があるところ、本実施形態では、そのような必要が無い。
【0051】
リニアモータ1は、固定部材15Aを有している。固定部材15Aは、コイル21を保持する保持部15cと、z方向に見てコイル21の配置領域と重ならない延在部15dとを有している。また、リニアモータ1は、磁気感応素子23が実装され、コイル21に固定された素子基板25と、周辺部品31が実装され、延在部15dに固定された周辺回路基板29と、素子基板25と周辺回路基板29とを接続する可撓性のケーブル27とを有している。
【0052】
従って、周辺回路基板29は、固定部材15Aを介してコイル21と重ならない位置に強固に固定される。素子基板25も固定部材15Aに取り付けた場合には、コイル21と固定部材15Aとの位置決めに誤差が生じると、コイル21と磁気感応素子23との位置決めにも誤差が生じることになるが、そのような不都合は生じない。また、そのような誤差若しくはコイル21に生じる凹凸等に起因して素子基板25と周辺回路基板29との間に位置ずれが生じても、その位置ずれは可撓性のケーブル27によって吸収され、基板に不要な応力は生じない。
【0053】
素子基板25は、コイル21と複数の磁石19と間において、z方向に面するようにコイル21に固定されている。周辺回路基板29は、z方向に面するように延在部15dに固定されている。ケーブル27は、一端が素子基板25の面に重ねられて実装され、他端が周辺回路基板29の面に重ねられて実装されたフレキシブルフラットケーブルである。従って、コイル21及び磁気センサ17全体の構成が薄型化される。
【0054】
また、素子基板25は、磁気感応素子23が実装された面を複数の磁石19側に向けてコイル21に固定されている。保持部15cは、コイル21及び素子基板25と、複数の磁石19との間に位置し、z方向に面する板状部15aを有する。板状部15aには、磁気感応素子23を収容する空所15hが形成されている。
【0055】
従って、磁気感応素子23の少なくとも一部の厚みと、板状部15aの少なくとも一部の厚みとは、重複し(積算されず)、リニアモータ1の薄型化が図られる。また、磁気感応素子23が素子基板25に対してコイル21側ではなく磁石19側に位置することから、コイル21と磁気感応素子23との絶縁性も確保されやすくなる。
【0056】
(第2の実施形態)
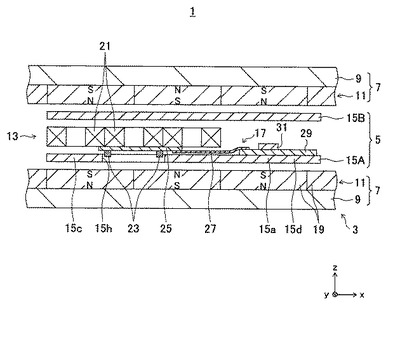
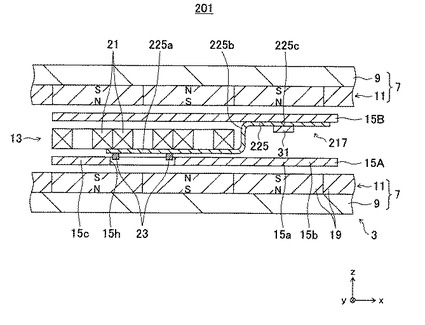
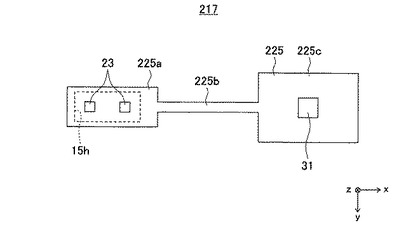
図5は、第2の実施形態に係るリニアモータ201を示す断面図(第1の実施形態の図3に相当)である。図6は、リニアモータ201の磁気センサ217を示す平面図(第1の実施形態の図4に相当)である。
【0057】
第2の実施形態では、第1の実施形態の素子基板25、ケーブル27及び周辺回路基板29に代えて、1枚のフレキシブル基板225が設けられている。その他の構成は、第1の実施形態と概ね同様である。
【0058】
フレキシブル基板225は、1層板(片面板)であってもよいし、2層板(両面板)であってもよいし、多層板であってもよい。例えば、フレキシブル基板225は、一方の面においては、磁気感応素子23及び周辺部品31を表面実装可能に導電層が露出しており、他方の面はその全面が絶縁層により構成されている。なお、フレキシブル基板225の基材、絶縁材料、及び導電材料は適宜な材料から選択されてよい。
【0059】
フレキシブル基板225は、磁気感応素子23が実装され、コイル21に固定された素子部225aと、周辺部品31が実装され、延在部15dに固定された周辺回路部225cと、素子部225aと周辺回路部225cとを接続する接続部225bとを有する。各部の平面形状は適宜な形状とされてよい。
【0060】
素子部225aは、素子基板25と同様に、磁気感応素子23が実装された面とは反対側の面がコイル21に接着されている。周辺回路部225cは、周辺部品31が実装された面とは反対側の面が固定部材15Bに接着されている。
【0061】
以上の第2の実施形態によっても、磁気感応素子23は、コイル21の配置領域と重なる領域に設けられ、周辺部品31は、コイル21の配置領域と重ならない位置に設けられていることから、第1の実施形態と同様に、リニアモータの小型化等の効果が期待される。
【0062】
(第3の実施形態)
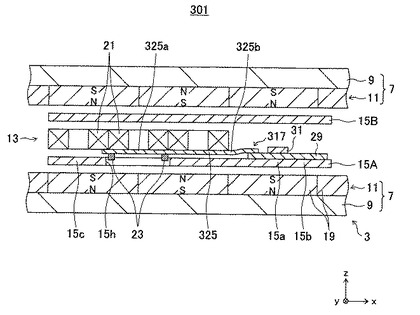
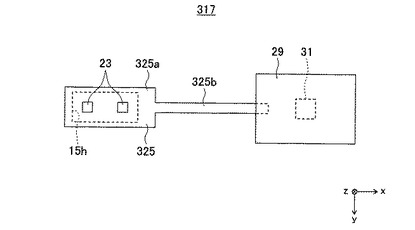
図7は、第3の実施形態に係るリニアモータ301を示す断面図(第1の実施形態の図3に相当)である。図8は、リニアモータ301の磁気センサ317を示す平面図(第1の実施形態の図4に相当)である。
【0063】
第3の実施形態では、第1の実施形態の素子基板25及びケーブル27に代えて、1枚のフレキシブル基板325が設けられている。その他の構成は、第1の実施形態と概ね同様である。
【0064】
フレキシブル基板325は、1層板(片面板)であってもよいし、2層板(両面板)であってもよいし、多層板であってもよい。例えば、フレキシブル基板325は、一方の面においては、磁気感応素子23を表面実装可能に導電層が露出しており、他方の面はその全面が絶縁層により構成されている。なお、フレキシブル基板325の基材、絶縁材料、及び導電材料は適宜な材料から選択されてよい。
【0065】
フレキシブル基板325は、磁気感応素子23が実装され、コイル21に固定された素子部325aと、素子部325aから延び出て、周辺回路基板29に接続される接続部325bとを有する。各部の平面形状は適宜な形状とされてよい。
【0066】
素子部325aは、素子基板25と同様に、磁気感応素子23が実装された面とは反対側の面がコイル21に接着されている。接続部325bは、素子部325a側とは反対側の端部が、周辺回路基板29の周辺部品31が実装された面に重ねられ、はんだ等を介して周辺回路基板29に接着されている。
【0067】
以上の第3の実施形態によっても、磁気感応素子23は、コイル21の配置領域と重なる領域に設けられ、周辺部品31は、コイル21の配置領域と重ならない位置に設けられていることから、第1の実施形態と同様に、リニアモータの小型化等の効果が期待される。
【0068】
本発明は、以上の実施形態に限定されず、種々の態様で実施されてよい。
【0069】
コイルは、複数設けられなくてもよく、1つのコイルのみを有するものであってもよい。また、1つの又は駆動方向に配列される複数のコイルは、軸方向を磁極の向きに一致させて配置されるものに限定されず、軸方向を駆動方向に一致させて配置されるものであってもよい。また、軸方向を磁極の向きに一致させて配置される複数のコイルは、互いに一部が重なりつつ駆動方向に配列されるものであってもよい。また、軸方向を磁極の向きに一致させて駆動方向に配列される複数のコイルは、互いに対向する2つの磁石列それぞれに対向するように2組設けられてもよい。
【0070】
複数の磁石からなる磁石列は、2つ設けられなくてもよく、1つのみ設けられてもよい。また、コイルが軸方向を駆動方向に一致させるリニアモータにおいては、駆動方向の側方(y方向)に3つめの磁石列が設けらてもよい。また、2つの磁石列は、互いに異なる磁極を対向させるものに限定されず、互いに同一の磁極を対向させるものであってもよい。
【0071】
3相交流電力が供給される3以上のコイルが設けられるリニアモータにおいて、駆動方向(x方向)の所定長さにおけるコイルの数と磁石の数との比は、3:2に限定されず、例えば、3:4であってもよい。
【0072】
センサ素子は、磁気感応素子に限定されず、例えば、サーミスタであってもよい。また、磁気感応素子は、1つのみ設けられるものであってもよい。2つの磁気感応素子の離間距離は、1対(2つ)の磁石の駆動方向(x方向)における長さの1/4に限定されず、例えば、1/8であってもよい。
【0073】
また、センサ素子の配置位置は、駆動方向(x方向)若しくは駆動方向の側方(y方向)に見て、コイルに対して磁石側にずれた位置に限定されない。例えば、センサ素子の配置位置は、コイルの開口内であってもよいし、(1つの磁石列のみを有するリニアモータにおいて)コイルに対して磁石とは反対側にずれた位置であってもよい。
【0074】
周辺部品の配置位置は、コイルに対して駆動方向にずれた位置に限定されない。コイルに対して駆動方向の側方(y方向)にずれた位置であってもよい。
【0075】
センサ素子及び周辺部品のコイル等への固定方法は、第1〜第3の実施形態に例示したものに限定されない。
【0076】
例えば、センサ素子は、素子基板を介さずに、直接若しくは基板以外の適宜な部材を介してコイルに固定されてもよい。
【0077】
また、例えば、第1の実施形態において、素子基板と周辺回路基板とを接続するケーブル(第1の実施形態)は、フレキシブルフラットケーブルに限定されず、断面円形のケーブルであってもよい。
【0078】
また、例えば、第2の実施形態において、接続部225bを長くするとともに折り返すことにより、固定部材15Aに対して周辺回路部225cの周辺部品31が実装された側とは反対側の面を固定してもよい。
【0079】
また、例えば、第2の実施形態において、フレキシブル基板225の、磁気感応素子23が実装された面とは反対側の面に周辺部品31を実装し、周辺回路部225cの周辺部品31が実装された面とは反対側の面を固定部材15Aに固定してもよい。
【0080】
また、例えば、第3の実施形態では、素子基板及び接続部がフレキシブル基板とされ、周辺回路基板がリジッド式の基板とされたが、素子基板がリジッド式の基板とされ、接続部及び周辺回路部がフレキシブル基板とされてもよい。
【0081】
コイルを保持するとともに周辺回路基板(周辺回路部)が固定される固定部材は、コイルと磁石との間に配置されるものに限定されない。例えば、実施形態のリニアモータにおいて、固定部材15B側の磁石列11及びヨーク9を省略するとともに、固定部材15Aを省略したリニアモータ(コイルに対して磁石とは反対側の固定部材のみによりコイルを保持するリニアモータ)において、周辺回路基板を固定部材15Bに設けてもよい。
【符号の説明】
【0082】
1…リニアモータ、19…磁石、21…コイル、23…磁気感応素子(センサ素子)、31…周辺部品。
【技術分野】
【0001】
本発明は、磁極センサ等のセンサを有するリニアモータに関する。
【背景技術】
【0002】
磁極センサ等のセンサを有するリニアモータが知られている(例えば特許文献1)。特許文献1のリニアモータは、複数のコイルと、複数のコイルと相対的に移動可能な複数の磁石と、複数のコイルに対して固定的に設けられた磁気センサとを有している。磁気センサは、センサ基板に2つのホール素子が実装されて構成され、駆動方向において複数のコイルから離間した位置に配置されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−252532号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のような構成では、リニアモータの駆動方向における大型化を招くおそれがある。例えば、コイル側の構成は、駆動方向においてコイルとセンサ基板との双方の大きさを必要とする。また、センサが磁石の磁気を検出するものである場合においては、コイルとセンサとの双方が常に磁石に対向する必要性から、磁石側の構成も駆動方向において大型化する(磁石列の一端には、センサのみに対向し得る磁石が設けられ、磁石列の他端には、コイルのみに対向し得る磁石が設けられる)。
【0005】
本発明の目的は、センサを好適に配置できるリニアモータを提供することにある。
【課題を解決するための手段】
【0006】
本発明のリニアモータは、駆動方向に直交する方向に磁極を向けるとともに磁極の向きを交互に逆転させながら前記駆動方向に配列された複数の磁石と、前記複数の磁石に対して前記直交する方向に位置し、前記複数の磁石に対して前記駆動方向に移動可能なコイルと、前記直交する方向に見て前記コイルの配置領域と重なる位置にて、前記コイルに対して固定的に設けられたセンサ素子と、前記直交する方向に見て前記コイルの配置領域と重ならない位置にて、前記コイルに対して固定的に設けられ、前記センサ素子へ電力を供給する又は前記センサ素子からの信号を増幅するための周辺部品と、を有する。
【0007】
好適には、前記コイルは、3相交流電力の供給により前記駆動方向に移動可能に前記駆動方向に複数配列されており、前記センサ素子は、磁気感応素子である。
【0008】
好適には、前記リニアモータは、前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、前記センサ素子が実装され、前記コイルに固定された素子基板と、前記周辺部品が実装され、前記延在部に固定された周辺回路基板と、前記素子基板と前記周辺回路基板とを接続する可撓性のケーブルと、を有する。
【0009】
好適には、前記素子基板は、前記コイルと前記複数の磁石と間において、前記直交する方向に面するように前記コイルに固定されており、前記周辺回路基板は、前記直交する方向に面するように前記延在部に固定されており、前記ケーブルは、一端が前記素子基板の面に重ねられて実装され、他端が前記周辺回路基板の面に重ねられて実装されたフレキシブルフラットケーブルである。
【0010】
好適には、前記素子基板は、前記センサ素子が実装された面を前記複数の磁石側に向けて前記コイルに固定されており、前記保持部は、前記コイル及び前記素子基板と、前記複数の磁石との間に位置し、前記直交する方向に面する板状部を有し、前記板状部には、前記センサ素子を収容する空所が形成されている。
【0011】
好適には、前記リニアモータは、前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、前記センサ素子が実装され、前記コイルに固定された素子部と、前記周辺部品が実装され、前記延在部に固定された周辺回路部と、前記素子部と前記周辺回路部とを接続する接続部とを有するフレキシブル基板と、を有する。
【0012】
好適には、前記リニアモータは、前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、前記センサ素子が実装され、前記コイルに固定された素子部と、前記素子部から延在する接続部とを有するフレキシブル基板と、前記周辺部品が実装され、前記延在部に固定され、前記接続部と接続された周辺回路基板と、を有する。
【発明の効果】
【0013】
上記の構成によれば、センサを好適に配置できる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1の実施形態に係るリニアモータの外観を示す斜視図。
【図2】図1のリニアモータの一部を取り外して示す斜視図。
【図3】図1のIII−III線における断面図。
【図4】図1のリニアモータの磁気センサを示す平面図。
【図5】本発明の第2の実施形態に係るリニアモータの断面図。
【図6】図5のリニアモータの磁気センサを示す平面図。
【図7】本発明の第3の実施形態に係るリニアモータの断面図。
【図8】図7のリニアモータの磁気センサを示す平面図。
【発明を実施するための形態】
【0015】
(第1の実施形態)
図1は、本発明の第1の実施形態に係るリニアモータ装置51の外観を示す斜視図である。図2は、リニアモータ装置51の一部を取り外して示す斜視図である。
【0016】
リニアモータ装置51は、リニアモータ1と、リニアモータ1を駆動するためのドライバ53及び制御装置55とを有している。
【0017】
リニアモータ1は、x方向に駆動力を発揮するリニアモータである。すなわち、リニアモータ1は、固定子3(図1)と、固定子3に対してx方向へ駆動される可動子5(図1)とを有している。なお、可動子5は、不図示の支持機構及び/又は不図示の駆動対象によって、固定子3に対してx方向に移動可能に支持されている。
【0018】
固定子3は、z方向において互いに対向して配置された1対の固定子構成部材7を有している。なお、固定子構成部材7それぞれが固定子と捉えられてもよい。1対の固定子構成部材7は、不図示の固定部材及び/又は不図示の駆動対象によって、互いに固定されている。
【0019】
各固定子構成部材7は、ヨーク9と、ヨーク9に取り付けられた磁石列11とを有している。可動子5は、コイル列13と、コイル列13を保持する1対の固定部材15A,15B(以下、A,Bを省略することがある。)と、コイル列13の磁石列11に対する位置を検出するための磁気センサ17(図2)とを有している。
【0020】
ヨーク9は、例えば、z方向に面し、x方向に延びる、概ね矩形の平板状に形成されている。また、ヨーク9は、例えば、鉄等の磁性体により形成されている。
【0021】
磁石列11は、複数の磁石19によって構成されている。複数の磁石19は、互いに同一の構成とされている。各磁石19は、例えば、長方形の平板状に形成されており、その厚み方向において着磁されている。そして、複数の磁石19は、磁極(平板の面)をz方向に向け、長手方向をy方向とし、磁極を交互に逆転させながら、x方向に配列されている。なお、複数の磁石19は、ネジ若しくは接着剤等の適宜な方法によりヨーク9に対して固定されている。2つの磁石列11は、例えば、z方向において互いに異なる磁極を対向させている。
【0022】
このような固定子3においては、可動子5側に向くN極から出た磁束は、当該N極にz方向において対向するS極に入る。また、ヨーク9側に向くN極から出た磁束は、ヨーク9を介して、当該N極にx方向において隣接するS極に入る。
【0023】
コイル列13は、3つ以上(本実施形態では3つ)のコイル21によって構成されている。複数のコイル21は、互いに同一の構成とされている。各コイル21は、銅等の導線が絶縁被膜により被覆されて構成された線材が複数回巻き回されて構成されている。その全体形状は、例えば、軸方向において扁平で、平面視における(軸方向に見た)形状が概ね長方形(若しくは長円形)に形成されている。そして、複数のコイル21は、軸方向をz方向に向け、長手方向をy方向とし、x方向に配列されている。x方向の所定長さにおける、コイル21の数と磁石19の数との比は、例えば、3:2とされている。
【0024】
従って、コイル21に電力を供給すると、コイル21のy方向に延びる部分を流れる電流が磁石19のz方向への磁束に交差し、フレミングの左手の法則に従ってx方向の駆動力が生じる。そして、互いに隣接する3つのコイル21に対して3相交流電力を供給することにより、コイル列13は、3相交流電力の周波数に比例(同期)した速度でx方向へ移動する。なお、U相(若しくは−U相)、V相(若しくは−V相)及びW相(若しくは−W相)の電力が供給される3つのコイル21のx方向における並び順は、公知の並び順と同様でよい。
【0025】
固定部材15は、コイル21の保持及びコイル21の駆動力を不図示の駆動対象部材に伝達する機能を果たすためのものである。2つの固定部材15は、概ね(後述する空所15hを除き)、互いに同一の構成とされている。固定部材15は、板状部15aと、板状部15aからコイル列13側に突出し、x方向に延びる突条部15bとを有している。別の観点では、固定部材15は、コイル列13を保持する保持部15cと、保持部15cからz方向に見てコイル列13の外側へ延び出る延在部15dとを有している。固定部材15は、非磁性材料、例えば、炭素繊維強化プラスチック(CFRP)により形成されている。なお、固定部材15A及び固定部材15Bは、互いに固定されるから、双方を含んで一つの部材として概念化されてもよい。
【0026】
コイル21は、固定部材15に対してコイル21の軸方向が板状部15aに直交するように配置され、保持部15cにおける突条部15bに対して接着剤により固定されている。そして、固定部材15は、コイル21が固定された側とは反対側の面をz方向において磁石列11に対向させて配置される。換言すれば、固定部材15は、コイル21と磁石列11との間に位置している。なお、コイル21と板状部15aとの間には隙間が生じている。固定部材15は、適宜な位置において不図示の駆動対象部材と連結される。
【0027】
図3は、図1のIII−III線における断面図である。また、図4は、磁気センサ17の平面図である。
【0028】
磁気センサ17は、2つの磁気感応素子23と、磁気感応素子23が実装された素子基板25と、素子基板25に接続されたケーブル27と、ケーブル27を介して素子基板25と接続された周辺回路基板29と、周辺回路基板29に実装された周辺部品31とを有している。
【0029】
磁気感応素子23は、例えば、ホール素子により構成されており、自己の位置における磁界の強さ及び磁界の向きに応じた信号レベル(例えば電圧)の信号を出力する。例えば、磁界が大きいほど信号レベルの絶対値は大きくなり、磁界の向きに応じて信号レベルの正負が変化する。2つの磁気感応素子23は、x方向において、互いに離間して配置されている。その間隔は、例えば、1対の磁石19のx方向の長さの1/4(1つの磁石19のx方向の長さの1/2)である。
【0030】
従って、磁気感応素子23は、複数の磁石19に対してx方向に移動すると、1対の磁石19の、x方向の長さを1周期(2π)とする正弦波(余弦波)の信号を生成する。また、2つの磁気感応素子23がx方向の一方へ移動するときには、他方の磁気感応素子23の信号が一方の磁気感応素子23の信号に対して1/4周期で遅れ、2つの磁気感応素子23がx方向の他方へ移動するときには、一方の磁気感応素子23の信号が他方の磁気感応素子23の信号に対して1/4周期で遅れる。換言すれば、2つの磁気感応素子23の信号の信号レベルの組み合わせと、2つの磁気感応素子23の1対の磁石19に対する位置とは、一義的に定まる。
【0031】
素子基板25は、リジッド式のプリント配線板により構成されている。プリント配線板は、1層板(片面板)であってもよいし、2層板(両面板)であってもよいし、多層板であってもよい。例えば、素子基板25は、一方の面においては、磁気感応素子23等を実装可能に導電層が露出しており、他方の面はその全面が絶縁層により構成されている。なお、素子基板25の基材、絶縁材料、及び導電材料は適宜な材料から選択されてよい。
【0032】
素子基板25の一方の面には、磁気感応素子23が実装されている。実装は、例えば、はんだ若しくは導電性樹脂を用いた表面実装である。素子基板25は、磁気感応素子23が実装された面とは反対側の面をコイル列13に向けてコイル列13に対して固定されている。固定は、例えば、接着剤によりなされている。
【0033】
従って、磁気感応素子23は、z方向に見て、コイル21の配置領域と重なる位置にて、コイル21に対して固定的に設けられている。なお、本願では、「コイルの配置領域」は、コイル及びその開口を含む領域をいうものとする。また、「固定的に設けられている」は、直接固定されていてもよいし、他の部材を介して間接的に固定されていてもよいことを意味するものとする。
【0034】
なお、コイル21と素子基板25との間には、これらの絶縁性を高めるためにガラスエポキシ樹脂等の絶縁性材料からなる、膜、平板若しくはシートを介在させてもよい。ただし、当該膜、平板若しくはシートは素子基板25の一部と捉えられてもよい。
【0035】
ケーブル27は、例えば、フレキシブルフラットケーブルにより構成されている。従って、ケーブル27は、薄型であるとともに、可撓性を有している。ケーブル27の一端は、素子基板25の、磁気感応素子23が実装された面に重ねられ、はんだを介して素子基板25の導電層に接続されている。また、ケーブル27の他端は、周辺回路基板29の、周辺部品31が実装された面に重ねられ、はんだを介して周辺回路基板29の導電層に接続されている。
【0036】
周辺回路基板29は、リジッド式のプリント配線板により構成されている。プリント配線板は、1層板(片面板)であってもよいし、2層板(両面板)であってもよいし、多層板であってもよい。例えば、周辺回路基板29は、一方の面においては、周辺部品31等を実装可能に導電層が露出しており、他方の面はその全面が絶縁層により構成されている。なお、周辺回路基板29の基材、絶縁材料、及び導電材料は適宜な材料から選択されてよい。
【0037】
周辺回路基板29の一方の面には、周辺部品31が実装されている。実装は、例えば、はんだ若しくは導電性樹脂を用いた表面実装である。周辺回路基板29は、周辺部品31が実装された面とは反対側の面を、固定部材15Aの延在部15dの板状部15aに向けて当該板状部15aに対して固定されている。固定は、例えば、接着剤によりなされている。
【0038】
従って、周辺部品31は、z方向に見て、コイル21の配置領域と重ならない位置にて、コイル21に対して固定的に設けられている。
【0039】
なお、周辺回路基板29と板状部15aとの間には、これらの絶縁性を高めるためにガラスエポキシ樹脂等の絶縁性材料からなる、膜、平板若しくはシートを介在させてもよい。ただし、当該膜、平板若しくはシートは周辺回路基板29若しくは固定部材15の一部と捉えられてもよい。
【0040】
また、周辺回路基板29は、不図示のケーブルを介して制御装置55と接続されている。当該ケーブルは、例えば、周辺回路基板29の、周辺部品31が実装された面に実装された不図示のコネクタを介して周辺回路基板29に接続されている。
【0041】
周辺部品31は、例えば、磁気感応素子23に電力を供給したり、磁気感応素子23からの信号を増幅したり、磁気感応素子23からのアナログ信号をデジタル化したりするための周辺回路を構成するためのものである。なお、周辺部品31は、それ単体で、ドライバ若しくは増幅器等として機能する部品であってもよいし、周辺回路基板29及び他の周辺部品31と共に、ドライバ若しくは増幅器等を構成するものであってもよい。
【0042】
磁気センサ17の各部材の寸法は適宜に設定されてよい。例えば、素子基板25は、周辺回路基板29よりも薄い。また、素子基板25及び磁気感応素子23の全体の厚みも、周辺回路基板29及び周辺部品31の全体の厚みよりも薄い。また、ケーブル27は素子基板25よりも薄い。一例として、周辺回路基板29の厚みは1.6mm程度であり、素子基板25の厚みは0.2mm程度であり、磁気感応素子23の厚みは1mm程度である。
【0043】
図3に示すように、固定部材15Aの板状部15aには、磁気感応素子23を収容可能な空所15hが形成されている。空所15hは、孔、切り欠き若しくは凹部により構成されている(本実施形態では孔)。図4において点線で示すように、空所15hは、素子基板25の面積よりも小さく形成されている。
【0044】
図2に戻って、制御装置55は、例えば、CPU、ROM、RAM及び外部記憶装置を含んで構成されており、予め定められたシーケンスに従って若しくは不図示の入力装置からの信号に従って、ドライバ53に制御信号を出力する。ドライバ53は、制御信号に応じた周波数、位相及び電圧の電力を複数のコイル21に供給する。
【0045】
また、制御装置55は、複数の周辺部品31のうち駆動部品に磁気感応素子23への電力供給を指示するとともに、複数の周辺部品31のうち増幅器からの信号を受け取る。そして、制御装置55は、磁気センサ17からの信号に基づいてコイル21と磁石19の磁極との相対位置を特定し、その相対位置に応じて3相交流電力の位相を決定し、その位相の情報を含む、ドライバ53への制御信号を生成する。
【0046】
なお、リニアモータ1は、以上に説明した他、例えば、可動子5の固定子3に対する位置を特定するためのリニアエンコーダを備え、制御装置55は、当該リニアエンコーダの信号に基づいて位置制御及び/又は速度制御を行ってもよい。
【0047】
以上のとおり、本実施形態では、リニアモータ1は、駆動方向(x方向)に直交する方向(z方向)に磁極を向けるとともに磁極の向きを交互に逆転させながらx方向に配列された複数の磁石19と、複数の磁石19に対してz方向に位置し、複数の磁石19に対してx方向に移動可能なコイル21と、z方向に見てコイル21の配置領域と重なる位置にて、コイル21に対して固定的に設けられた磁気感応素子23と、z方向に見てコイル21の配置領域と重ならない位置にて、コイル21に対して固定的に設けられ、磁気感応素子23へ電力を供給する又は磁気感応素子23からの信号を増幅するための周辺部品31とを有している。
【0048】
すなわち、従来のリニアモータにおいては、磁気センサは、磁気感応素子23及び周辺部品31の全体が1部品として概念され、リニアモータ本体に対する取り付け位置が設計されていたところ、本実施形態においては、磁気センサを1部品として捉えるのではなく、磁気感応素子23及び周辺部品31を別々の部品として概念化して、リニアモータ本体に融合させている。具体的には、相対的に厚みが小さくなる傾向にある磁気感応素子23(及び素子基板25)をコイル21に重なる位置に配置し、相対的に厚みが大きくなる傾向にある周辺部品31(及び周辺回路基板29)をコイル21に重ならない位置に配置していることから、特許文献1に比較して少なくともx方向において小型化され、また、全体としての小型化も期待される。なお、このような配置は、磁気センサの製造業者から磁気感応素子及び周辺部品を含む磁気センサを購入してリニアモータ本体に取り付けているリニアモータの製造業者、若しくは、シビアな小型化が要求されない大型のリニアモータの開発者においては想到することが困難である。なお、周辺回路基板29がコイル21と重ならない位置に配置されることによって、コイル21からの熱が周辺回路基板29に伝達されることが抑制される効果も期待される。
【0049】
コイル21は、3相交流電力の供給により駆動方向(x方向)に移動可能にx方向に複数配列されており、上記のように配置されるセンサ素子(23)は、磁気感応素子である。
【0050】
この場合、磁石列11を短くできることから、リニアモータ1の小型化が顕著となる。すなわち、磁気感応素子23が周辺回路基板29に実装されているとすれば、磁気感応素子23が常に磁石列11に対向する必要性から、磁石列11は、コイル列13がx方向の正側の可動限に位置したときに、磁気感応素子23と対向する磁石19(この磁石19は、コイル列13の可動範囲外に位置し、コイル列13とは対向しない)を有する必要があるところ、本実施形態では、そのような必要が無い。
【0051】
リニアモータ1は、固定部材15Aを有している。固定部材15Aは、コイル21を保持する保持部15cと、z方向に見てコイル21の配置領域と重ならない延在部15dとを有している。また、リニアモータ1は、磁気感応素子23が実装され、コイル21に固定された素子基板25と、周辺部品31が実装され、延在部15dに固定された周辺回路基板29と、素子基板25と周辺回路基板29とを接続する可撓性のケーブル27とを有している。
【0052】
従って、周辺回路基板29は、固定部材15Aを介してコイル21と重ならない位置に強固に固定される。素子基板25も固定部材15Aに取り付けた場合には、コイル21と固定部材15Aとの位置決めに誤差が生じると、コイル21と磁気感応素子23との位置決めにも誤差が生じることになるが、そのような不都合は生じない。また、そのような誤差若しくはコイル21に生じる凹凸等に起因して素子基板25と周辺回路基板29との間に位置ずれが生じても、その位置ずれは可撓性のケーブル27によって吸収され、基板に不要な応力は生じない。
【0053】
素子基板25は、コイル21と複数の磁石19と間において、z方向に面するようにコイル21に固定されている。周辺回路基板29は、z方向に面するように延在部15dに固定されている。ケーブル27は、一端が素子基板25の面に重ねられて実装され、他端が周辺回路基板29の面に重ねられて実装されたフレキシブルフラットケーブルである。従って、コイル21及び磁気センサ17全体の構成が薄型化される。
【0054】
また、素子基板25は、磁気感応素子23が実装された面を複数の磁石19側に向けてコイル21に固定されている。保持部15cは、コイル21及び素子基板25と、複数の磁石19との間に位置し、z方向に面する板状部15aを有する。板状部15aには、磁気感応素子23を収容する空所15hが形成されている。
【0055】
従って、磁気感応素子23の少なくとも一部の厚みと、板状部15aの少なくとも一部の厚みとは、重複し(積算されず)、リニアモータ1の薄型化が図られる。また、磁気感応素子23が素子基板25に対してコイル21側ではなく磁石19側に位置することから、コイル21と磁気感応素子23との絶縁性も確保されやすくなる。
【0056】
(第2の実施形態)
図5は、第2の実施形態に係るリニアモータ201を示す断面図(第1の実施形態の図3に相当)である。図6は、リニアモータ201の磁気センサ217を示す平面図(第1の実施形態の図4に相当)である。
【0057】
第2の実施形態では、第1の実施形態の素子基板25、ケーブル27及び周辺回路基板29に代えて、1枚のフレキシブル基板225が設けられている。その他の構成は、第1の実施形態と概ね同様である。
【0058】
フレキシブル基板225は、1層板(片面板)であってもよいし、2層板(両面板)であってもよいし、多層板であってもよい。例えば、フレキシブル基板225は、一方の面においては、磁気感応素子23及び周辺部品31を表面実装可能に導電層が露出しており、他方の面はその全面が絶縁層により構成されている。なお、フレキシブル基板225の基材、絶縁材料、及び導電材料は適宜な材料から選択されてよい。
【0059】
フレキシブル基板225は、磁気感応素子23が実装され、コイル21に固定された素子部225aと、周辺部品31が実装され、延在部15dに固定された周辺回路部225cと、素子部225aと周辺回路部225cとを接続する接続部225bとを有する。各部の平面形状は適宜な形状とされてよい。
【0060】
素子部225aは、素子基板25と同様に、磁気感応素子23が実装された面とは反対側の面がコイル21に接着されている。周辺回路部225cは、周辺部品31が実装された面とは反対側の面が固定部材15Bに接着されている。
【0061】
以上の第2の実施形態によっても、磁気感応素子23は、コイル21の配置領域と重なる領域に設けられ、周辺部品31は、コイル21の配置領域と重ならない位置に設けられていることから、第1の実施形態と同様に、リニアモータの小型化等の効果が期待される。
【0062】
(第3の実施形態)
図7は、第3の実施形態に係るリニアモータ301を示す断面図(第1の実施形態の図3に相当)である。図8は、リニアモータ301の磁気センサ317を示す平面図(第1の実施形態の図4に相当)である。
【0063】
第3の実施形態では、第1の実施形態の素子基板25及びケーブル27に代えて、1枚のフレキシブル基板325が設けられている。その他の構成は、第1の実施形態と概ね同様である。
【0064】
フレキシブル基板325は、1層板(片面板)であってもよいし、2層板(両面板)であってもよいし、多層板であってもよい。例えば、フレキシブル基板325は、一方の面においては、磁気感応素子23を表面実装可能に導電層が露出しており、他方の面はその全面が絶縁層により構成されている。なお、フレキシブル基板325の基材、絶縁材料、及び導電材料は適宜な材料から選択されてよい。
【0065】
フレキシブル基板325は、磁気感応素子23が実装され、コイル21に固定された素子部325aと、素子部325aから延び出て、周辺回路基板29に接続される接続部325bとを有する。各部の平面形状は適宜な形状とされてよい。
【0066】
素子部325aは、素子基板25と同様に、磁気感応素子23が実装された面とは反対側の面がコイル21に接着されている。接続部325bは、素子部325a側とは反対側の端部が、周辺回路基板29の周辺部品31が実装された面に重ねられ、はんだ等を介して周辺回路基板29に接着されている。
【0067】
以上の第3の実施形態によっても、磁気感応素子23は、コイル21の配置領域と重なる領域に設けられ、周辺部品31は、コイル21の配置領域と重ならない位置に設けられていることから、第1の実施形態と同様に、リニアモータの小型化等の効果が期待される。
【0068】
本発明は、以上の実施形態に限定されず、種々の態様で実施されてよい。
【0069】
コイルは、複数設けられなくてもよく、1つのコイルのみを有するものであってもよい。また、1つの又は駆動方向に配列される複数のコイルは、軸方向を磁極の向きに一致させて配置されるものに限定されず、軸方向を駆動方向に一致させて配置されるものであってもよい。また、軸方向を磁極の向きに一致させて配置される複数のコイルは、互いに一部が重なりつつ駆動方向に配列されるものであってもよい。また、軸方向を磁極の向きに一致させて駆動方向に配列される複数のコイルは、互いに対向する2つの磁石列それぞれに対向するように2組設けられてもよい。
【0070】
複数の磁石からなる磁石列は、2つ設けられなくてもよく、1つのみ設けられてもよい。また、コイルが軸方向を駆動方向に一致させるリニアモータにおいては、駆動方向の側方(y方向)に3つめの磁石列が設けらてもよい。また、2つの磁石列は、互いに異なる磁極を対向させるものに限定されず、互いに同一の磁極を対向させるものであってもよい。
【0071】
3相交流電力が供給される3以上のコイルが設けられるリニアモータにおいて、駆動方向(x方向)の所定長さにおけるコイルの数と磁石の数との比は、3:2に限定されず、例えば、3:4であってもよい。
【0072】
センサ素子は、磁気感応素子に限定されず、例えば、サーミスタであってもよい。また、磁気感応素子は、1つのみ設けられるものであってもよい。2つの磁気感応素子の離間距離は、1対(2つ)の磁石の駆動方向(x方向)における長さの1/4に限定されず、例えば、1/8であってもよい。
【0073】
また、センサ素子の配置位置は、駆動方向(x方向)若しくは駆動方向の側方(y方向)に見て、コイルに対して磁石側にずれた位置に限定されない。例えば、センサ素子の配置位置は、コイルの開口内であってもよいし、(1つの磁石列のみを有するリニアモータにおいて)コイルに対して磁石とは反対側にずれた位置であってもよい。
【0074】
周辺部品の配置位置は、コイルに対して駆動方向にずれた位置に限定されない。コイルに対して駆動方向の側方(y方向)にずれた位置であってもよい。
【0075】
センサ素子及び周辺部品のコイル等への固定方法は、第1〜第3の実施形態に例示したものに限定されない。
【0076】
例えば、センサ素子は、素子基板を介さずに、直接若しくは基板以外の適宜な部材を介してコイルに固定されてもよい。
【0077】
また、例えば、第1の実施形態において、素子基板と周辺回路基板とを接続するケーブル(第1の実施形態)は、フレキシブルフラットケーブルに限定されず、断面円形のケーブルであってもよい。
【0078】
また、例えば、第2の実施形態において、接続部225bを長くするとともに折り返すことにより、固定部材15Aに対して周辺回路部225cの周辺部品31が実装された側とは反対側の面を固定してもよい。
【0079】
また、例えば、第2の実施形態において、フレキシブル基板225の、磁気感応素子23が実装された面とは反対側の面に周辺部品31を実装し、周辺回路部225cの周辺部品31が実装された面とは反対側の面を固定部材15Aに固定してもよい。
【0080】
また、例えば、第3の実施形態では、素子基板及び接続部がフレキシブル基板とされ、周辺回路基板がリジッド式の基板とされたが、素子基板がリジッド式の基板とされ、接続部及び周辺回路部がフレキシブル基板とされてもよい。
【0081】
コイルを保持するとともに周辺回路基板(周辺回路部)が固定される固定部材は、コイルと磁石との間に配置されるものに限定されない。例えば、実施形態のリニアモータにおいて、固定部材15B側の磁石列11及びヨーク9を省略するとともに、固定部材15Aを省略したリニアモータ(コイルに対して磁石とは反対側の固定部材のみによりコイルを保持するリニアモータ)において、周辺回路基板を固定部材15Bに設けてもよい。
【符号の説明】
【0082】
1…リニアモータ、19…磁石、21…コイル、23…磁気感応素子(センサ素子)、31…周辺部品。
【特許請求の範囲】
【請求項1】
駆動方向に直交する方向に磁極を向けるとともに磁極の向きを交互に逆転させながら前記駆動方向に配列された複数の磁石と、
前記複数の磁石に対して前記直交する方向に位置し、前記複数の磁石に対して前記駆動方向に移動可能なコイルと、
前記直交する方向に見て前記コイルの配置領域と重なる位置にて、前記コイルに対して固定的に設けられたセンサ素子と、
前記直交する方向に見て前記コイルの配置領域と重ならない位置にて、前記コイルに対して固定的に設けられ、前記センサ素子へ電力を供給する又は前記センサ素子からの信号を増幅するための周辺部品と、
を有するリニアモータ。
【請求項2】
前記コイルは、3相交流電力の供給により前記駆動方向に移動可能に前記駆動方向に複数配列されており、
前記センサ素子は、磁気感応素子である
請求項1に記載のリニアモータ。
【請求項3】
前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、
前記センサ素子が実装され、前記コイルに固定された素子基板と、
前記周辺部品が実装され、前記延在部に固定された周辺回路基板と、
前記素子基板と前記周辺回路基板とを接続する可撓性のケーブルと、
を有する請求項1又は2に記載のリニアモータ。
【請求項4】
前記素子基板は、前記コイルと前記複数の磁石との間において、前記直交する方向に面するように前記コイルに固定されており、
前記周辺回路基板は、前記直交する方向に面するように前記延在部に固定されており、
前記ケーブルは、一端が前記素子基板の面に重ねられて実装され、他端が前記周辺回路基板の面に重ねられて実装されたフレキシブルフラットケーブルである
請求項3に記載のリニアモータ。
【請求項5】
前記素子基板は、前記センサ素子が実装された面を前記複数の磁石側に向けて前記コイルに固定されており、
前記保持部は、前記コイル及び前記素子基板と、前記複数の磁石との間に位置し、前記直交する方向に面する板状部を有し、
前記板状部には、前記センサ素子を収容する空所が形成されている
請求項3又は4に記載のリニアモータ。
【請求項6】
前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、
前記センサ素子が実装され、前記コイルに固定された素子部と、前記周辺部品が実装され、前記延在部に固定された周辺回路部と、前記素子部と前記周辺回路部とを接続する接続部とを有するフレキシブル基板と、
を有する請求項1又は2に記載のリニアモータ。
【請求項7】
前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、
前記センサ素子が実装され、前記コイルに固定された素子部と、前記素子部から延在する接続部とを有するフレキシブル基板と、
前記周辺部品が実装され、前記延在部に固定され、前記接続部と接続された周辺回路基板と、
を有する請求項1又は2に記載のリニアモータ。
【請求項1】
駆動方向に直交する方向に磁極を向けるとともに磁極の向きを交互に逆転させながら前記駆動方向に配列された複数の磁石と、
前記複数の磁石に対して前記直交する方向に位置し、前記複数の磁石に対して前記駆動方向に移動可能なコイルと、
前記直交する方向に見て前記コイルの配置領域と重なる位置にて、前記コイルに対して固定的に設けられたセンサ素子と、
前記直交する方向に見て前記コイルの配置領域と重ならない位置にて、前記コイルに対して固定的に設けられ、前記センサ素子へ電力を供給する又は前記センサ素子からの信号を増幅するための周辺部品と、
を有するリニアモータ。
【請求項2】
前記コイルは、3相交流電力の供給により前記駆動方向に移動可能に前記駆動方向に複数配列されており、
前記センサ素子は、磁気感応素子である
請求項1に記載のリニアモータ。
【請求項3】
前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、
前記センサ素子が実装され、前記コイルに固定された素子基板と、
前記周辺部品が実装され、前記延在部に固定された周辺回路基板と、
前記素子基板と前記周辺回路基板とを接続する可撓性のケーブルと、
を有する請求項1又は2に記載のリニアモータ。
【請求項4】
前記素子基板は、前記コイルと前記複数の磁石との間において、前記直交する方向に面するように前記コイルに固定されており、
前記周辺回路基板は、前記直交する方向に面するように前記延在部に固定されており、
前記ケーブルは、一端が前記素子基板の面に重ねられて実装され、他端が前記周辺回路基板の面に重ねられて実装されたフレキシブルフラットケーブルである
請求項3に記載のリニアモータ。
【請求項5】
前記素子基板は、前記センサ素子が実装された面を前記複数の磁石側に向けて前記コイルに固定されており、
前記保持部は、前記コイル及び前記素子基板と、前記複数の磁石との間に位置し、前記直交する方向に面する板状部を有し、
前記板状部には、前記センサ素子を収容する空所が形成されている
請求項3又は4に記載のリニアモータ。
【請求項6】
前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、
前記センサ素子が実装され、前記コイルに固定された素子部と、前記周辺部品が実装され、前記延在部に固定された周辺回路部と、前記素子部と前記周辺回路部とを接続する接続部とを有するフレキシブル基板と、
を有する請求項1又は2に記載のリニアモータ。
【請求項7】
前記コイルを保持する保持部と、前記直交する方向に見て前記コイルの配置領域と重ならない延在部とを有する固定部材と、
前記センサ素子が実装され、前記コイルに固定された素子部と、前記素子部から延在する接続部とを有するフレキシブル基板と、
前記周辺部品が実装され、前記延在部に固定され、前記接続部と接続された周辺回路基板と、
を有する請求項1又は2に記載のリニアモータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−115880(P2013−115880A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258085(P2011−258085)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000003458)東芝機械株式会社 (843)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000003458)東芝機械株式会社 (843)
【Fターム(参考)】
[ Back to top ]