
リバースシンクロ機構の検査方法
【目的】 手動変速機のアッシー段階でリバースシンクロ機構の有無や異常を容易且つ正確に検査できるようにする。
【構成】 出力軸14を一方向へ回転駆動した状態でシフトレバーをニュートラル位置からリバース位置へ切換操作すると、リバースシンクロ機構36が正常であれば第5速用歯車28aが一時的にカウンタ軸12に係合させられることにより、入力軸18が一時的に出力軸14と同じ方向へ回転させられ、その後リバース用アイドル歯車38がリバース用歯車40a,40bに噛み合わされることにより入力軸18は出力軸14と反対方向へ回転させられるようになるため、シフトレバーの切換過程で入力軸18が出力軸14の回転方向と同じ方向へ回転したか否かによってリバースシンクロ機構36の有無を判定する。
【構成】 出力軸14を一方向へ回転駆動した状態でシフトレバーをニュートラル位置からリバース位置へ切換操作すると、リバースシンクロ機構36が正常であれば第5速用歯車28aが一時的にカウンタ軸12に係合させられることにより、入力軸18が一時的に出力軸14と同じ方向へ回転させられ、その後リバース用アイドル歯車38がリバース用歯車40a,40bに噛み合わされることにより入力軸18は出力軸14と反対方向へ回転させられるようになるため、シフトレバーの切換過程で入力軸18が出力軸14の回転方向と同じ方向へ回転したか否かによってリバースシンクロ機構36の有無を判定する。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明はリバースシンクロ機構が正常に作動するか否かを検査する方法に係り、特に、熟練を要することなく容易且つ正確に検査する方法に関するものである。
【0002】
【従来の技術】自動車などの手動変速機の一種に、(a)互いに平行な第1軸および第2軸と、(b)それ等の第1軸および第2軸と平行な第3軸まわりに回転可能に配設され、シフトレバーがリバース位置へ操作されることにより、その第1軸および第2軸にそれぞれ設けられた一対のリバース用歯車と噛み合わされてその第1軸および第2軸を同じ方向へ回転させるリバース用アイドル歯車と、(c)前記第1軸に相対回転可能に設けられた遊動歯車と、(d)前記第2軸に一体的に設けられて一体回転させられるとともに、前記遊動歯車に噛み合わされた固定歯車と、(e)前記遊動歯車と前記第1軸との間に設けられ、前記シフトレバーがニュートラル位置に操作された状態ではその遊動歯車と第1軸との相対回転を許容するが、シフトレバーがニュートラル位置から前記リバース位置へ切換操作されると、前記リバース用アイドル歯車が前記リバース用歯車と噛み合う前に一時的にその遊動歯車と第1軸とを係合させるリバースシンクロ機構とを有するものがある。特開平3−292420号公報に記載されている装置はその一例である。
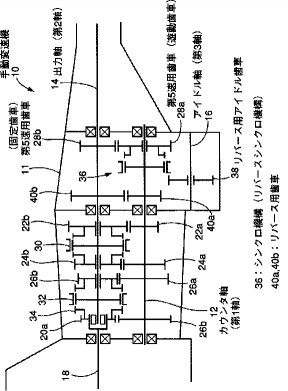
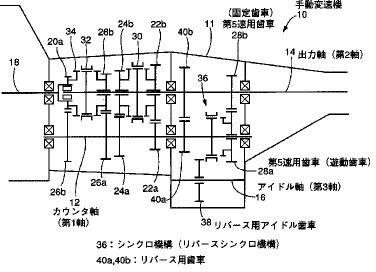
【0003】図5は、このような手動変速機の一例を示す骨子図で、この手動変速機10のトランスミッションケース11内には、第1軸としてのカウンタ軸12および第2軸としての出力軸14が互いに平行に軸心まわりの回転可能に配設されているとともに、第3軸としてのアイドル軸16がそれ等と平行に配設されており、図示しないエンジンからクラッチを介して回転力が伝達される入力軸18が出力軸14と同軸上に設けられている。入力軸18とカウンタ軸12は歯車対20a,20bを介して連結され、常に所定のギヤ比で反対方向へ同期回転させられるようになっている一方、カウンタ軸12と出力軸14は、第1速用歯車対22a,22b、第2速用歯車対24a,24b、第3速用歯車対26a,26b、および第5速用歯車対28a,28bを介して連結されるようになっている。歯車22a,24a,26aはカウンタ軸12に一体的に設けられているが、歯車22b,24b,26bは出力軸14に相対回転可能に配設されており、シンクロ機構30または32を介して出力軸14に択一的に連結される。一方のシンクロ機構32は、入力軸18に設けられた第4速用歯車34と噛み合わされることにより、入力軸18を出力軸14に直結して一体回転させるようになっている。また、第5速用の歯車28bは出力軸14に一体的に設けられているが、歯車28aはカウンタ軸12に相対回転可能に配設されており、シンクロ機構36を介してカウンタ軸12に一体的に連結される。そして、シフトレバー37(図1R>1参照)が第1速位置〜第5速位置の何れかに操作されると、シンクロ機構30,32,または36によって対応する前進変速段が成立させられ、出力軸14が入力軸18に対して所定の変速比で同一方向へ回転駆動される一方、シフトレバー37がニュートラル位置に操作されると、シンクロ機構30,32,および36は何れも非連結状態となり、出力軸14に対して入力軸18やカウンタ軸12が自由回転することが許容される。
【0004】前記アイドル軸16にはリバース用アイドル歯車38が軸心まわりの回転可能に配設されており、シフトレバー37がリバース位置へ操作されると、カウンタ軸12および出力軸14にそれぞれ設けられた一対のリバース用歯車40a,40bと噛み合わされ、出力軸14がカウンタ軸12と同じ方向、すなわち入力軸18と反対方向へ所定の変速比で回転させられる。その場合に、前記第5速用の歯車28aは、上記シフトレバー37がリバース位置へ操作される過程で一時的に前記シンクロ機構36によってカウンタ軸12に係合させられ、カウンタ軸12と出力軸14とを同期させる。すなわち、シフトレバー37がニュートラル位置に保持されている状態でクラッチが接続されていると、入力軸18およびカウンタ軸12はエンジンによって回転駆動されるため、その状態でクラッチを遮断してシフトレバー37をリバース位置へ切り換えようとしても、カウンタ軸12は惰性で回転し続けている一方出力軸14は停止しているため、アイドル歯車38とリバース用歯車40a,40bとがスムーズに噛み合わずにギヤ鳴りなどを生じる恐れがあるが、上記のようにシンクロ機構36を介して歯車28aとカウンタ軸12とを係合させると、歯車28aは歯車28bと噛み合って停止しているためカウンタ軸12の惰性回転が停止させられるのである。シンクロ機構36の係合は一時的なもので、アイドル歯車38がリバース用歯車40a,40bに噛み合う前に非係合状態に戻って歯車28aとカウンタ軸12との相対回転、更にはカウンタ軸12と出力軸14との相対回転が許容されるため、回転自在のアイドル歯車38は、リバース用歯車40bとの噛合いで自身が軸心まわりに回動させられるとともに、リバース用歯車40aを回動させながら、スムーズにそれ等のリバース用歯車40a,40bに噛み合うことができる。シンクロ機構36はリバースシンクロ機構を兼ねており、第5速用の歯車28aおよび28bはそれぞれ遊動歯車および固定歯車を兼ねている。
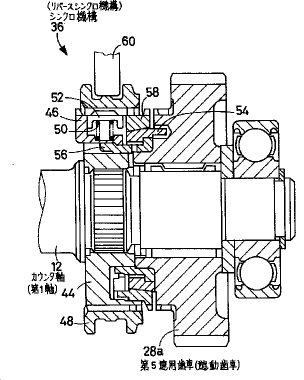
【0005】上記シンクロ機構36について具体的に説明すると、例えば図6に示すように構成され、カウンタ軸12に相対回転不能に配設されたハブ44と、そのハブ44に所定量だけ相対回転可能且つ軸方向の移動可能に配設されたリバースシンクロナイザリング46と、ハブ44の外周に相対回転不能且つ軸方向の移動可能に配設されたハブスリーブ48と、ハブスリーブ48の内側に配設されるとともにスプリング50によってハブスリーブ48の凹所に押圧され、そのばね力に基づいてハブスリーブ48とリバースシンクロナイザリング46との軸方向の相対移動を制限する複数(例えば3個)のキー52と、前記歯車28aと一体的に回転させられるとともに軸方向の相対移動可能に配設されたテーパ形状のコーンリング54と、そのコーンリング54とリバースシンクロナイザリング46とが軸方向へ所定量以上離間することを阻止するプルリング56と、ハブ44に対して所定量だけ相対回転可能且つ軸方向の移動可能に配設された5速シンクロナイザリング58とを備えている。そして、シフトレバー37がニュートラル位置に保持されている場合、シフトフォーク60は図のように位置させられ、歯車28aと一体回転させられるコーンリング54と、カウンタ軸12と一体回転させられる他の構成部材との間で相対回転することが許容される。
【0006】一方、シフトレバー37がニュートラル位置からリバース位置へ切り換えられると、シフトフォーク60は図の左方向へ移動させられ、その駆動力はハブスリーブ48からキー52を介してリバースシンクロナイザリング46,プルリング56,コーンリング54へ伝達され、ハブ44の端面に当接させられた5速シンクロナイザリング58とコーンリング54との間に前記スプリング50のばね力に応じた摩擦力が発生させられる。ハブスリーブ48が更に左方向へ移動させられると、スプリング50のばね力に抗してキー52が内周側へ押し込まれるとともに、図7に示すようにハブスリーブ48に設けられたスプライン62がリバースシンクロナイザリング46に設けられたスプライン64に当接させられ、コーンリング54と5速シンクロナイザリング58との間の摩擦力が増大して歯車28aとカウンタ軸12とが一体的に連結され、これによりカウンタ軸12の惰性回転が停止させられる。ハブスリーブ48が更に左方向へ移動させられ、リバースシンクロナイザリング46が相対回動してスプライン62とスプライン64とが互いに噛み合わされると、軸方向の規制がなくなり、リバースシンクロナイザリング46が自由に図6の右方向へ移動することが許容されるため、コーンリング54と5速シンクロナイザリング58との間の摩擦力が0となり、コーンリング54と他の構成部材との相対回転、すなわち歯車28aとカウンタ軸12との相対回転が許容される。
【0007】ところで、以上のように構成された手動変速機のリバースシンクロ機構を車両に組み付ける前のアッシー段階で検査する場合、前記入力軸18にクラッチを介して電動モータなどの回転駆動手段を接続し、シフトレバー37をニュートラル位置に保持した状態で入力軸18を回転駆動するとともに、所定の設定回転数に到達した時点でクラッチを遮断して入力軸18およびカウンタ軸12を惰性回転させ、出力軸14を回転不能に固定した状態でシフトレバー37をリバース位置へ切換操作することにより車両に搭載した実車状態を再現している。そして、シフトレバー37を切換操作する際の操作抵抗やギヤ鳴りなどに基づいてシンクロ機構36の有無や異常を作業者が感により経験的に判断している。
【0008】
【発明が解決しようとする課題】しかしながら、このような従来の検査方法は熟練を要するばかりでなく、機差によってシフトレバーの操作抵抗は微妙に異なるため、必ずしも高い検査精度が得られない。また、シフトレバー操作時にリバース用アイドル歯車と一対のリバース用歯車との位相が偶然合致していると、リバースシンクロ機構の有無や異常に拘らずシフトレバーはスムーズにリバース位置へ移動するため、熟練者であってもリバースシンクロ機構の有無や異常を正確に判断することは困難であり、判断ミスを防ぐためにテストを複数回繰り返すと検査時間が長くなる。
【0009】本発明は以上の事情を背景として為されたもので、その目的とするところは、リバースシンクロ機構の有無や異常を容易且つ正確に検査できるようにすることにある。
【0010】
【課題を解決するための手段】かかる目的を達成するために、本発明は、前記(a)第1軸および第2軸と、(b)リバース用アイドル歯車と、(c)遊動歯車と、(d)固定歯車と、(e)リバースシンクロ機構とを有する手動変速機において、前記リバースシンクロ機構が正常に作動するか否かを検査する方法であって、(f)前記シフトレバーがニュートラル位置に保持されている状態で、前記第1軸および第2軸の何れか一方を回転駆動手段によって回転駆動する回転駆動工程と、(g)前記一方の軸が回転させられた状態で前記シフトレバーをリバース位置へ切り換える切換工程と、(h)前記第1軸および第2軸の他方の回転方向を回転検出手段によって検出し、前記シフトレバーがリバース位置へ切り換えられる過程でその他方の軸が前記回転駆動手段による一方の軸の回転方向と反対方向へ回転した場合に、前記リバースシンクロ機構が正常に作動していると判定する判定工程とを有することを特徴とする。
【0011】
【作用】すなわち、先ず回転駆動工程を実施し、シフトレバーをニュートラル位置に保持した状態で、第1軸および第2軸の何れか一方を回転駆動手段によって回転駆動する。シフトレバーがニュートラル位置に保持されている状態では、リバースシンクロ機構は非係合状態で遊動歯車と第1軸との相対回転が許容されるため、一方の軸が回転駆動されても他方の軸は停止したままである。その後、切換工程においてシフトレバーをリバース位置へ切り換えるとともに、判定工程で他方の軸の回転方向を回転検出手段によって検出し、シフトレバーがリバース位置へ切り換えられる過程でその他方の軸が一方の軸と反対方向へ回転した場合に、リバースシンクロ機構が正常に作動していると判定する。
【0012】リバースシンクロ機構は、シフトレバーがリバース位置へ切り換えられる過程で一時的に遊動歯車と第1軸とを係合させるものであるため、この係合によって第1軸と第2軸は一時的に互いに反対方向へ回転させられ、その後シフトレバーがリバース位置へ完全に切り換えられると、リバース用アイドル歯車が一対のリバース用歯車と噛み合わされて第1軸および第2軸は互いに同じ方向へ回転させられるようになる。すなわち、リバースシンクロ機構が正常であれば、他方の軸は一時的に一方の軸と反対方向へ回転させられた後同じ方向へ回転させられるようになるが、リバースシンクロ機構が存在しない場合や正しく作動していない場合は、他方の軸は一方の軸と反対方向へ回転することなく直ちに同じ方向へ回転させられるため、他方の軸が一方の軸と反対方向へ回転するか否かによってリバースシンクロ機構が正常に作動しているか否かを判定できるのである。
【0013】
【発明の効果】このように、本発明の検査方法はシフトレバーをニュートラル位置からリバース位置へ切り換える過程で、他方の軸が一方の軸と反対方向へ回転したか否かによってリバースシンクロ機構が正常に作動しているか否かを判定するものであるため、熟練を要することなく容易に且つ正確に検査できる。また、回転検出手段によって他方の軸の回転方向を検出するようにしているため、シフトレバーの切換速度が速くて反対方向へ回転する時間が短い場合でも、その回転を確実に検出することが可能で高い検査精度が得られるとともに、軸の回転方向によって判定するものであるため検査の自動化が容易に可能である。
【0014】
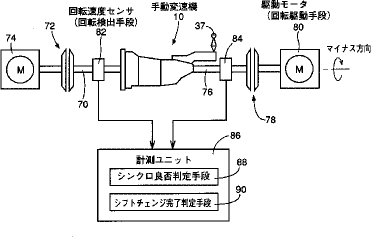
【実施例】以下、本発明の一実施例を図面に基づいて詳細に説明する。図1は、本発明方法に従って手動変速機のリバースシンクロ機構を検査する検査装置の一例を示す構成図で、前記手動変速機10を検査する場合である。手動変速機10の前記入力軸18には連結シャフト70が一体的に取り付けられ、クラッチ72を介して駆動モータ74が接続されている一方、出力軸14には連結シャフト76が一体的に取り付けられ、クラッチ78を介して駆動モータ80が接続されている。また、両連結シャフト70,76の近傍には回転速度センサ82,84が配設され、両連結シャフト70,76の回転方向および回転数を検出して、その検出信号を計測ユニット86に出力する。計測ユニット86は、CPU,ROM,RAMなどを備えてRAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行うマイクロコンピュータを含んで構成されており、機能的にシンクロ良否判定手段88およびシフトチェンジ完了判定手段90を備えている。シンクロ良否判定手段88は、リバースシンクロ機構として機能する前記シンクロ機構36の有無、すなわちシンクロ機構36が正常に作動しているか否かを判定するもので、シフトチェンジ完了判定手段90は、シフトレバー37のリバース位置への切換操作が完了したか否かを判定するものである。
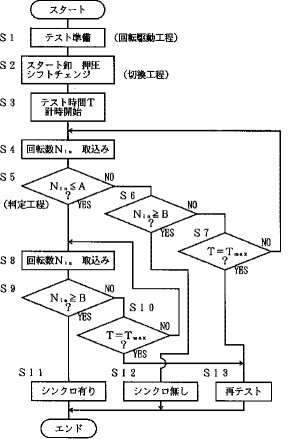
【0015】以下、図2のフローチャートを参照しつつ、シンクロ機構36の有無を検査する手順を具体的に説明する。先ず、ステップS1のテスト準備は作業者によって行われ、シフトレバー37をニュートラル位置に保持するとともにクラッチ72を遮断した状態で、クラッチ78を接続するとともに駆動モータ80を作動させて、出力軸14を予め定められた一定回転数N0 でマイナス(−)方向、すなわち図1や図5の右方向から見て右まわりに回転駆動する。この時、シフトレバー37がニュートラル位置に保持されていることから、入力軸18およびカウンタ軸12は略停止状態に維持される。かかるステップS1は回転駆動工程で、本実施例では出力軸14すなわち第2軸が一方の軸に相当し、駆動モータ80は回転駆動手段に相当する。
【0016】次のステップS2も作業者によって実行され、計測ユニット86に設けられたスタート釦を押圧操作した後、シフトレバー37をリバース位置へ切換操作する。計測ユニット86は、スタート釦が押圧操作されることにより直ちにステップS3以下の実行を開始し、ステップS2でスタート釦の押圧操作後に行われるシフトレバー37の切換操作は、実質的に計測ユニット86によるステップS3以下の各ステップの信号処理と並行して行われることになる。ステップS2のうちシフトレバー37をリバース位置へ切換操作する部分は切換工程に相当する。
【0017】ステップS3ではクロック信号源から供給されるクロック信号などに基づいてテスト時間Tの計時を開始し、ステップS4では回転速度センサ82から入力軸18の回転数Ninを表す検出信号を取り込む。回転数Ninは、そのプラス(+),マイナス(−)で回転方向を表しており、マイナス(−)であれば駆動モータ80による出力軸14の回転方向と同じで、プラス(+)であれば出力軸14の回転方向と反対である。次のステップS5は前記シンクロ良否判定手段88によって実行される部分で、回転数Ninが予め設定されたマイナスのシンクロ判定値A以下か否かを判断し、シンクロ判定値A以下の場合にはステップS9がYESであることを条件としてステップS11でリバースシンクロ有り、すなわちシンクロ機構36が正常に作動している旨の判定が為される。
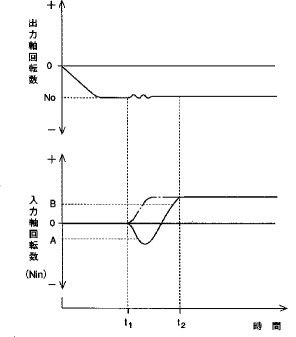
【0018】ここで、シンクロ機構36は、シフトレバー37がリバース位置へ切換操作される過程で一時的に歯車28aとカウンタ軸12とを係合させるものであるため、出力軸14の回転は第5速用の歯車対28b,28a、カウンタ軸12、歯車対20a,20bを介して入力軸18へ伝達されるようになり、入力軸18は一時的にマイナス(−)側へ回転させられ、その後シフトレバー37がリバース位置へ完全に切り換えられると、リバース用アイドル歯車38が一対のリバース用歯車40a,40bと噛み合わされて入力軸18はプラス(+)側へ回転させられる。すなわち、シンクロ機構36が正常であれば、図3のタイムチャートの下段に実線で示されているように入力軸18の回転数Ninは一時的に出力軸14と同じマイナス(−)側へ回転させられた後プラス(+)側へ変化するが、シンクロ機構36が存在しない場合は一点鎖線で示されているように入力軸18はマイナス(−)側へ回転することなく始めからプラス(+)側へ回転させられるため、入力軸18の回転数Ninがマイナスのシンクロ判定値A以下になればシンクロ機構36が正常に作動していると判定できるのである。シンクロ判定値Aは、出力軸14の回転数N0 、および第5速用歯車対28a,28b、歯車対20a,20bのギヤ比から求められる第5速変速段成立時の入力軸18の回転数よりも多少大きめ、すなわち絶対値としては小さめの値が設定され、シンクロ機構36が正常であれば回転速度センサ82の検出誤差などに拘らず回転数Ninが確実にシンクロ判定値Aを下回るようになっている。なお、図3の時間t1 はシフトチェンジ開始時間で、時間t2 はシンクロ正常時のシフトチェンジ完了時間である。
【0019】上記入力軸18はカウンタ軸12と常時噛合い回転させられ、その回転方向は反対向きであるため、入力軸18の回転方向が出力軸14の回転方向と同じであることは、第1軸であるカウンタ軸12の回転方向が出力軸14の回転方向と反対であることを意味し、ステップS5の実行内容は、カウンタ軸12が出力軸14と反対方向へ回転した場合にシンクロ機構36が正常である旨の判定を行うことと実質的に同じである。すなわち、このステップS5は判定工程で、本実施例ではカウンタ軸12すなわち第1軸が他方の軸に相当し、回転数Ninを検出する回転速度センサ82は回転検出手段に相当する。
【0020】上記ステップS5の判定がNOの場合、すなわち回転数Ninがシンクロ判定値Aより大きい場合にはステップS6を実行し、回転数Ninが予め設定されたシフト完了判定値B以上か否かを判断する。シフト完了判定値Bは、出力軸14の回転数N0 、およびリバース用歯車40a,40b、歯車対20a,20bのギヤ比から求められるリバース変速段成立時の入力軸18の回転数よりも多少小さめの値が設定され、シフトレバー37が完全にリバース位置へ切り換えられてリバース変速段が成立した場合、すなわちリバース用アイドル歯車38がリバース用歯車対40a,40bに噛み合った場合には、回転速度センサ82の検出誤差などに拘らず回転数Ninが確実にシフト完了判定値Bを上回るようになっている。このステップS6は前記シフトチェンジ完了判定手段90によって実行される。
【0021】そして、上記ステップS6の判断がYESの場合、すなわちNin≧Bの場合は、ステップS5の判断がYESとなること無くリバース変速段が成立したことを意味し、ステップS12でリバースシンクロ無しの判定が為される一方、ステップS6の判断がNOの場合はステップS7を実行する。ステップS7では、テスト時間Tが設定時間Tmax に達したか否かを判断し、設定時間Tmax に達するまでは前記ステップS4以下の実行を繰り返す。設定時間Tmax は、作業者がスタート釦を押圧操作した後、シフトレバー37のリバース位置への切換操作が完了するまでに必要な時間で、手動変速機10の機差などを考慮して余裕を持って定められ、ステップS5およびS6の判断が何れもYESとなること無くT=Tmax となった場合には、ステップS13で再テストの判定が為される。前記ステップS4における回転数Ninの取込み周期は例えば5ms程度で、その取込み周期と同じサイクルタイムでステップS4以下が繰り返し実行されることにより、シフトレバー37の操作速度のばらつきに拘らずステップS5で一時的なNin≦Aを確実に検出できるようになっている。
【0022】一方、前記ステップS5の判断がYESとなった場合、すなわちNin≦Aとなった場合には、ステップS8で前記ステップS4と同様に回転速度センサ82から入力軸18の回転数Ninを表す検出信号を取り込み、ステップS9で前記ステップS6と同様にしてNin≧Bか否かを判断する。回転数Ninがシフト完了判定値Bより小さい場合には、ステップS10で前記ステップS7と同様にしてT=Tmax か否かを判断し、テスト時間Tが設定時間Tmax に達するまではステップS8以下を繰り返す。そして、ステップS9の判断がYES、すなわちリバース位置への切換操作が完了してNin≧Bとなった場合には、ステップS11でリバースシンクロ有りの判定が為され、ステップS10の判断がYESとなった場合、すなわちテスト時間Tが設定時間Tmax に達した場合には、ステップS5のYES判断に拘らずステップS13で再テストの判定が為される。
【0023】ステップS11,S12,S13では、例えばランプの点灯やブザーなどの表示手段によって作業者に判定結果を知らせるようになっており、これにより、1台の手動変速機10に対するリバースシンクロ機構の有無に関する一連の検査が終了する。
【0024】このように、本実施例では出力軸14を回転駆動しながらシフトレバー37をニュートラル位置からリバース位置へ切り換える際に、シフトチェンジが完了する前に入力軸18の回転数Ninが一時的にシンクロ判定値Aを下回ったか否かによってリバースシンクロ機構の有無が自動的に判定されるため、作業者の負担が大幅に軽減されるとともに、作業者の感により経験的に判定していた従来の場合に比較して、手動変速機10の機差などに拘らず高い検査精度が得られる。これにより、新人や初心者でも容易にリバースシンクロ機構の検査を行うことが可能となる。
【0025】また、上記シンクロ判定値Aはシンクロ機構36が完全係合した場合の入力軸18の回転数に基づいて設定されているとともに、Nin≦Aとなり且つその後テスト時間Tが設定時間Tmax に達する前にNin≧Bとなった場合にリバースシンクロ有りの最終判定が為されるため、検査精度が更に高くなり検査結果に対して高い信頼性が得られる。
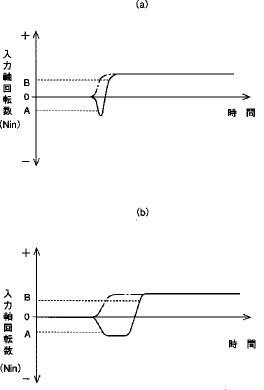
【0026】また、回転速度センサ82によって入力軸18の回転数Ninを検出しているとともに、計測ユニット86は5ms程度のサイクルタイムで回転数Ninを表す検出信号を取り込むようになっているため、シフトレバー37の操作速度のばらつきに拘らずステップS5で一時的なNin≦Aが確実に検出され、この点でも高い検査精度が得られる。すなわち、入力軸18の回転数Ninは、シフトレバー37の操作速度が速ければ図4の(a)に示すような波形となり、操作速度が遅い場合には同図の(b)に示すような波形となるが、何れの場合でも一時的なNin≦Aを確実に検出できるのである。
【0027】なお、図1の検査装置は手動変速機10をアッシー段階で総合的に検査するもので、上記のようにリバースシンクロ機構の有無を検査するだけであれば、クラッチ72,78、駆動モータ74、回転速度センサ84は必ずしも必要でなく、出力軸14を回転駆動する駆動モータ80および入力軸18の回転数Ninを検出する回転速度センサ82を備えておれば良い。また、上例では出力軸14をマイナス方向へ回転駆動するようになっていたが、逆のプラス方向へ回転駆動するようにしても良いことは勿論、駆動モータ74により入力軸18を回転駆動しながら回転速度センサ84により出力軸14の回転方向や回転数を検出してリバースシンクロ機構の有無を検査することもできる。
【0028】以上、本発明の一実施例を図面に基づいて詳細に説明したが、本発明は他の態様で実施することもできる。
【0029】例えば、前記実施例の手動変速機10は入力軸18からカウンタ軸12に回転力が伝達されるようになっていたが、カウンタ軸12がそのまま入力軸になっているものなど、リバースシンクロ機構を有する種々の形式の手動変速機の検査に本発明は同様に適用され得る。
【0030】また、前記実施例ではカウンタ軸12側の歯車28aが遊動歯車で出力軸14側の歯車28bが固定歯車であったが、逆に歯車28aをカウンタ軸12に固定するとともに歯車28bを出力軸14に相対回転可能に配設し、シンクロ機構36を出力軸14側に設けるようにしても良い。その場合は出力軸14が第1軸でカウンタ軸12が第2軸に相当する。
【0031】また、前記実施例では第5速用の歯車対28a,28bが遊動歯車,固定歯車を兼ねているとともに第5速用のシンクロ機構36にリバースシンクロ機構が組み込まれていたが、変速用歯車とは別に遊動歯車および固定歯車を配設したり、リバース切換時専用のリバースシンクロ機構を配設したりしても良い。図6のシンクロ機構36はあくまでも一例である。
【0032】また、前記実施例では作業者が駆動モータ80を作動させたりシフトレバー37を切換操作したりしていたが、シフトレバー37を自動でニュートラル位置からリバース位置へ切り換えるシフト切換手段を設けるなどして、作業者がテスト開始スイッチを押圧操作するだけで計測ユニット86が自動で駆動モータ80を作動させたり、シフトレバー37をリバース位置へ切り換えさせたりすることもできる。回転速度センサ84から取り込んだ出力軸14の回転数に基づいて、予め設定された手動変速機10の変速比などから前記判定値A,Bが自動設定されるようにしても良い。
【0033】また、前記実施例では計測ユニット86により自動でリバースシンクロ有無の判定が為されるようになっていたが、例えば図3に示すようなタイムチャートがブラウン管などの表示装置に表示されるようにして、その波形から作業者が異常の有無や原因などを判定できるようにしても良い。
【0034】また、前記実施例では入力軸18の回転数Ninが、シンクロ機構36が完全係合した場合の入力軸18の回転数に基づいて設定されたシンクロ判定値A以下となったか否かによって良否判定を行っていたが、入力軸18の回転方向が同じか否か、すなわち回転数Ninがマイナス、或いは誤差などを考慮して0より少し小さい所定の判定値以下か否かによって良否判定を行うようにしても良い。
【0035】また、前記実施例ではNin≦Aとなり且つその後テスト時間Tが設定時間Tmax に達する前にNin≧Bとなった場合にリバースシンクロ有りの最終判定が為されるようになっていたが、回転数Ninがシンクロ判定値A以下となったか否かだけでリバースシンクロ機構の良否判定を行うようにしても良い。
【0036】また、前記実施例では駆動モータ80により出力軸14を回転駆動した状態でリバースシンクロ機構の有無を検査するようになっていたが、クラッチ78を遮断するなどして出力軸14が惰性回転している状態でシフトレバー37を切り換えて検査することもできる。
【0037】その他一々例示はしないが、本発明は当業者の知識に基づいて種々の変更,改良を加えた態様で実施することができる。
【図面の簡単な説明】
【図1】本発明方法を好適に実施できる検査装置の構成図である。
【図2】図1の検査装置を用いてリバースシンクロ機構の有無を検査する際の手順を説明するフローチャートである。
【図3】図1の検査装置を用いてリバースシンクロ機構の有無を検査する際の出力軸回転数および入力軸回転数の変化を示すタイムチャートの一例である。
【図4】図1の検査装置を用いてリバースシンクロ機構の有無を検査する際のシフトレバーの操作速度が異なる場合の入力軸回転数の変化を比較して示すタイムチャートの一例である。
【図5】リバースシンクロ機構を有する手動変速機の一例を説明する骨子図である。
【図6】リバースシンクロ機構の一具体例を示す断面図である。
【図7】図6のリバースシンクロ機構のスプラインが当接した状態を示す図である。
【符号の説明】
10:手動変速機
12:カウンタ軸(第1軸)
14:出力軸(第2軸)
16:アイドル軸(第3軸)
28a:第5速用歯車(遊動歯車)
28b:第5速用歯車(固定歯車)
36:シンクロ機構(リバースシンクロ機構)
37:シフトレバー
38:リバース用アイドル歯車
40a,40b:リバース用歯車
80:駆動モータ(回転駆動手段)
82:回転速度センサ(回転検出手段)
ステップS1:回転駆動工程
ステップS2:切換工程
ステップS5:判定工程
【0001】
【産業上の利用分野】本発明はリバースシンクロ機構が正常に作動するか否かを検査する方法に係り、特に、熟練を要することなく容易且つ正確に検査する方法に関するものである。
【0002】
【従来の技術】自動車などの手動変速機の一種に、(a)互いに平行な第1軸および第2軸と、(b)それ等の第1軸および第2軸と平行な第3軸まわりに回転可能に配設され、シフトレバーがリバース位置へ操作されることにより、その第1軸および第2軸にそれぞれ設けられた一対のリバース用歯車と噛み合わされてその第1軸および第2軸を同じ方向へ回転させるリバース用アイドル歯車と、(c)前記第1軸に相対回転可能に設けられた遊動歯車と、(d)前記第2軸に一体的に設けられて一体回転させられるとともに、前記遊動歯車に噛み合わされた固定歯車と、(e)前記遊動歯車と前記第1軸との間に設けられ、前記シフトレバーがニュートラル位置に操作された状態ではその遊動歯車と第1軸との相対回転を許容するが、シフトレバーがニュートラル位置から前記リバース位置へ切換操作されると、前記リバース用アイドル歯車が前記リバース用歯車と噛み合う前に一時的にその遊動歯車と第1軸とを係合させるリバースシンクロ機構とを有するものがある。特開平3−292420号公報に記載されている装置はその一例である。
【0003】図5は、このような手動変速機の一例を示す骨子図で、この手動変速機10のトランスミッションケース11内には、第1軸としてのカウンタ軸12および第2軸としての出力軸14が互いに平行に軸心まわりの回転可能に配設されているとともに、第3軸としてのアイドル軸16がそれ等と平行に配設されており、図示しないエンジンからクラッチを介して回転力が伝達される入力軸18が出力軸14と同軸上に設けられている。入力軸18とカウンタ軸12は歯車対20a,20bを介して連結され、常に所定のギヤ比で反対方向へ同期回転させられるようになっている一方、カウンタ軸12と出力軸14は、第1速用歯車対22a,22b、第2速用歯車対24a,24b、第3速用歯車対26a,26b、および第5速用歯車対28a,28bを介して連結されるようになっている。歯車22a,24a,26aはカウンタ軸12に一体的に設けられているが、歯車22b,24b,26bは出力軸14に相対回転可能に配設されており、シンクロ機構30または32を介して出力軸14に択一的に連結される。一方のシンクロ機構32は、入力軸18に設けられた第4速用歯車34と噛み合わされることにより、入力軸18を出力軸14に直結して一体回転させるようになっている。また、第5速用の歯車28bは出力軸14に一体的に設けられているが、歯車28aはカウンタ軸12に相対回転可能に配設されており、シンクロ機構36を介してカウンタ軸12に一体的に連結される。そして、シフトレバー37(図1R>1参照)が第1速位置〜第5速位置の何れかに操作されると、シンクロ機構30,32,または36によって対応する前進変速段が成立させられ、出力軸14が入力軸18に対して所定の変速比で同一方向へ回転駆動される一方、シフトレバー37がニュートラル位置に操作されると、シンクロ機構30,32,および36は何れも非連結状態となり、出力軸14に対して入力軸18やカウンタ軸12が自由回転することが許容される。
【0004】前記アイドル軸16にはリバース用アイドル歯車38が軸心まわりの回転可能に配設されており、シフトレバー37がリバース位置へ操作されると、カウンタ軸12および出力軸14にそれぞれ設けられた一対のリバース用歯車40a,40bと噛み合わされ、出力軸14がカウンタ軸12と同じ方向、すなわち入力軸18と反対方向へ所定の変速比で回転させられる。その場合に、前記第5速用の歯車28aは、上記シフトレバー37がリバース位置へ操作される過程で一時的に前記シンクロ機構36によってカウンタ軸12に係合させられ、カウンタ軸12と出力軸14とを同期させる。すなわち、シフトレバー37がニュートラル位置に保持されている状態でクラッチが接続されていると、入力軸18およびカウンタ軸12はエンジンによって回転駆動されるため、その状態でクラッチを遮断してシフトレバー37をリバース位置へ切り換えようとしても、カウンタ軸12は惰性で回転し続けている一方出力軸14は停止しているため、アイドル歯車38とリバース用歯車40a,40bとがスムーズに噛み合わずにギヤ鳴りなどを生じる恐れがあるが、上記のようにシンクロ機構36を介して歯車28aとカウンタ軸12とを係合させると、歯車28aは歯車28bと噛み合って停止しているためカウンタ軸12の惰性回転が停止させられるのである。シンクロ機構36の係合は一時的なもので、アイドル歯車38がリバース用歯車40a,40bに噛み合う前に非係合状態に戻って歯車28aとカウンタ軸12との相対回転、更にはカウンタ軸12と出力軸14との相対回転が許容されるため、回転自在のアイドル歯車38は、リバース用歯車40bとの噛合いで自身が軸心まわりに回動させられるとともに、リバース用歯車40aを回動させながら、スムーズにそれ等のリバース用歯車40a,40bに噛み合うことができる。シンクロ機構36はリバースシンクロ機構を兼ねており、第5速用の歯車28aおよび28bはそれぞれ遊動歯車および固定歯車を兼ねている。
【0005】上記シンクロ機構36について具体的に説明すると、例えば図6に示すように構成され、カウンタ軸12に相対回転不能に配設されたハブ44と、そのハブ44に所定量だけ相対回転可能且つ軸方向の移動可能に配設されたリバースシンクロナイザリング46と、ハブ44の外周に相対回転不能且つ軸方向の移動可能に配設されたハブスリーブ48と、ハブスリーブ48の内側に配設されるとともにスプリング50によってハブスリーブ48の凹所に押圧され、そのばね力に基づいてハブスリーブ48とリバースシンクロナイザリング46との軸方向の相対移動を制限する複数(例えば3個)のキー52と、前記歯車28aと一体的に回転させられるとともに軸方向の相対移動可能に配設されたテーパ形状のコーンリング54と、そのコーンリング54とリバースシンクロナイザリング46とが軸方向へ所定量以上離間することを阻止するプルリング56と、ハブ44に対して所定量だけ相対回転可能且つ軸方向の移動可能に配設された5速シンクロナイザリング58とを備えている。そして、シフトレバー37がニュートラル位置に保持されている場合、シフトフォーク60は図のように位置させられ、歯車28aと一体回転させられるコーンリング54と、カウンタ軸12と一体回転させられる他の構成部材との間で相対回転することが許容される。
【0006】一方、シフトレバー37がニュートラル位置からリバース位置へ切り換えられると、シフトフォーク60は図の左方向へ移動させられ、その駆動力はハブスリーブ48からキー52を介してリバースシンクロナイザリング46,プルリング56,コーンリング54へ伝達され、ハブ44の端面に当接させられた5速シンクロナイザリング58とコーンリング54との間に前記スプリング50のばね力に応じた摩擦力が発生させられる。ハブスリーブ48が更に左方向へ移動させられると、スプリング50のばね力に抗してキー52が内周側へ押し込まれるとともに、図7に示すようにハブスリーブ48に設けられたスプライン62がリバースシンクロナイザリング46に設けられたスプライン64に当接させられ、コーンリング54と5速シンクロナイザリング58との間の摩擦力が増大して歯車28aとカウンタ軸12とが一体的に連結され、これによりカウンタ軸12の惰性回転が停止させられる。ハブスリーブ48が更に左方向へ移動させられ、リバースシンクロナイザリング46が相対回動してスプライン62とスプライン64とが互いに噛み合わされると、軸方向の規制がなくなり、リバースシンクロナイザリング46が自由に図6の右方向へ移動することが許容されるため、コーンリング54と5速シンクロナイザリング58との間の摩擦力が0となり、コーンリング54と他の構成部材との相対回転、すなわち歯車28aとカウンタ軸12との相対回転が許容される。
【0007】ところで、以上のように構成された手動変速機のリバースシンクロ機構を車両に組み付ける前のアッシー段階で検査する場合、前記入力軸18にクラッチを介して電動モータなどの回転駆動手段を接続し、シフトレバー37をニュートラル位置に保持した状態で入力軸18を回転駆動するとともに、所定の設定回転数に到達した時点でクラッチを遮断して入力軸18およびカウンタ軸12を惰性回転させ、出力軸14を回転不能に固定した状態でシフトレバー37をリバース位置へ切換操作することにより車両に搭載した実車状態を再現している。そして、シフトレバー37を切換操作する際の操作抵抗やギヤ鳴りなどに基づいてシンクロ機構36の有無や異常を作業者が感により経験的に判断している。
【0008】
【発明が解決しようとする課題】しかしながら、このような従来の検査方法は熟練を要するばかりでなく、機差によってシフトレバーの操作抵抗は微妙に異なるため、必ずしも高い検査精度が得られない。また、シフトレバー操作時にリバース用アイドル歯車と一対のリバース用歯車との位相が偶然合致していると、リバースシンクロ機構の有無や異常に拘らずシフトレバーはスムーズにリバース位置へ移動するため、熟練者であってもリバースシンクロ機構の有無や異常を正確に判断することは困難であり、判断ミスを防ぐためにテストを複数回繰り返すと検査時間が長くなる。
【0009】本発明は以上の事情を背景として為されたもので、その目的とするところは、リバースシンクロ機構の有無や異常を容易且つ正確に検査できるようにすることにある。
【0010】
【課題を解決するための手段】かかる目的を達成するために、本発明は、前記(a)第1軸および第2軸と、(b)リバース用アイドル歯車と、(c)遊動歯車と、(d)固定歯車と、(e)リバースシンクロ機構とを有する手動変速機において、前記リバースシンクロ機構が正常に作動するか否かを検査する方法であって、(f)前記シフトレバーがニュートラル位置に保持されている状態で、前記第1軸および第2軸の何れか一方を回転駆動手段によって回転駆動する回転駆動工程と、(g)前記一方の軸が回転させられた状態で前記シフトレバーをリバース位置へ切り換える切換工程と、(h)前記第1軸および第2軸の他方の回転方向を回転検出手段によって検出し、前記シフトレバーがリバース位置へ切り換えられる過程でその他方の軸が前記回転駆動手段による一方の軸の回転方向と反対方向へ回転した場合に、前記リバースシンクロ機構が正常に作動していると判定する判定工程とを有することを特徴とする。
【0011】
【作用】すなわち、先ず回転駆動工程を実施し、シフトレバーをニュートラル位置に保持した状態で、第1軸および第2軸の何れか一方を回転駆動手段によって回転駆動する。シフトレバーがニュートラル位置に保持されている状態では、リバースシンクロ機構は非係合状態で遊動歯車と第1軸との相対回転が許容されるため、一方の軸が回転駆動されても他方の軸は停止したままである。その後、切換工程においてシフトレバーをリバース位置へ切り換えるとともに、判定工程で他方の軸の回転方向を回転検出手段によって検出し、シフトレバーがリバース位置へ切り換えられる過程でその他方の軸が一方の軸と反対方向へ回転した場合に、リバースシンクロ機構が正常に作動していると判定する。
【0012】リバースシンクロ機構は、シフトレバーがリバース位置へ切り換えられる過程で一時的に遊動歯車と第1軸とを係合させるものであるため、この係合によって第1軸と第2軸は一時的に互いに反対方向へ回転させられ、その後シフトレバーがリバース位置へ完全に切り換えられると、リバース用アイドル歯車が一対のリバース用歯車と噛み合わされて第1軸および第2軸は互いに同じ方向へ回転させられるようになる。すなわち、リバースシンクロ機構が正常であれば、他方の軸は一時的に一方の軸と反対方向へ回転させられた後同じ方向へ回転させられるようになるが、リバースシンクロ機構が存在しない場合や正しく作動していない場合は、他方の軸は一方の軸と反対方向へ回転することなく直ちに同じ方向へ回転させられるため、他方の軸が一方の軸と反対方向へ回転するか否かによってリバースシンクロ機構が正常に作動しているか否かを判定できるのである。
【0013】
【発明の効果】このように、本発明の検査方法はシフトレバーをニュートラル位置からリバース位置へ切り換える過程で、他方の軸が一方の軸と反対方向へ回転したか否かによってリバースシンクロ機構が正常に作動しているか否かを判定するものであるため、熟練を要することなく容易に且つ正確に検査できる。また、回転検出手段によって他方の軸の回転方向を検出するようにしているため、シフトレバーの切換速度が速くて反対方向へ回転する時間が短い場合でも、その回転を確実に検出することが可能で高い検査精度が得られるとともに、軸の回転方向によって判定するものであるため検査の自動化が容易に可能である。
【0014】
【実施例】以下、本発明の一実施例を図面に基づいて詳細に説明する。図1は、本発明方法に従って手動変速機のリバースシンクロ機構を検査する検査装置の一例を示す構成図で、前記手動変速機10を検査する場合である。手動変速機10の前記入力軸18には連結シャフト70が一体的に取り付けられ、クラッチ72を介して駆動モータ74が接続されている一方、出力軸14には連結シャフト76が一体的に取り付けられ、クラッチ78を介して駆動モータ80が接続されている。また、両連結シャフト70,76の近傍には回転速度センサ82,84が配設され、両連結シャフト70,76の回転方向および回転数を検出して、その検出信号を計測ユニット86に出力する。計測ユニット86は、CPU,ROM,RAMなどを備えてRAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行うマイクロコンピュータを含んで構成されており、機能的にシンクロ良否判定手段88およびシフトチェンジ完了判定手段90を備えている。シンクロ良否判定手段88は、リバースシンクロ機構として機能する前記シンクロ機構36の有無、すなわちシンクロ機構36が正常に作動しているか否かを判定するもので、シフトチェンジ完了判定手段90は、シフトレバー37のリバース位置への切換操作が完了したか否かを判定するものである。
【0015】以下、図2のフローチャートを参照しつつ、シンクロ機構36の有無を検査する手順を具体的に説明する。先ず、ステップS1のテスト準備は作業者によって行われ、シフトレバー37をニュートラル位置に保持するとともにクラッチ72を遮断した状態で、クラッチ78を接続するとともに駆動モータ80を作動させて、出力軸14を予め定められた一定回転数N0 でマイナス(−)方向、すなわち図1や図5の右方向から見て右まわりに回転駆動する。この時、シフトレバー37がニュートラル位置に保持されていることから、入力軸18およびカウンタ軸12は略停止状態に維持される。かかるステップS1は回転駆動工程で、本実施例では出力軸14すなわち第2軸が一方の軸に相当し、駆動モータ80は回転駆動手段に相当する。
【0016】次のステップS2も作業者によって実行され、計測ユニット86に設けられたスタート釦を押圧操作した後、シフトレバー37をリバース位置へ切換操作する。計測ユニット86は、スタート釦が押圧操作されることにより直ちにステップS3以下の実行を開始し、ステップS2でスタート釦の押圧操作後に行われるシフトレバー37の切換操作は、実質的に計測ユニット86によるステップS3以下の各ステップの信号処理と並行して行われることになる。ステップS2のうちシフトレバー37をリバース位置へ切換操作する部分は切換工程に相当する。
【0017】ステップS3ではクロック信号源から供給されるクロック信号などに基づいてテスト時間Tの計時を開始し、ステップS4では回転速度センサ82から入力軸18の回転数Ninを表す検出信号を取り込む。回転数Ninは、そのプラス(+),マイナス(−)で回転方向を表しており、マイナス(−)であれば駆動モータ80による出力軸14の回転方向と同じで、プラス(+)であれば出力軸14の回転方向と反対である。次のステップS5は前記シンクロ良否判定手段88によって実行される部分で、回転数Ninが予め設定されたマイナスのシンクロ判定値A以下か否かを判断し、シンクロ判定値A以下の場合にはステップS9がYESであることを条件としてステップS11でリバースシンクロ有り、すなわちシンクロ機構36が正常に作動している旨の判定が為される。
【0018】ここで、シンクロ機構36は、シフトレバー37がリバース位置へ切換操作される過程で一時的に歯車28aとカウンタ軸12とを係合させるものであるため、出力軸14の回転は第5速用の歯車対28b,28a、カウンタ軸12、歯車対20a,20bを介して入力軸18へ伝達されるようになり、入力軸18は一時的にマイナス(−)側へ回転させられ、その後シフトレバー37がリバース位置へ完全に切り換えられると、リバース用アイドル歯車38が一対のリバース用歯車40a,40bと噛み合わされて入力軸18はプラス(+)側へ回転させられる。すなわち、シンクロ機構36が正常であれば、図3のタイムチャートの下段に実線で示されているように入力軸18の回転数Ninは一時的に出力軸14と同じマイナス(−)側へ回転させられた後プラス(+)側へ変化するが、シンクロ機構36が存在しない場合は一点鎖線で示されているように入力軸18はマイナス(−)側へ回転することなく始めからプラス(+)側へ回転させられるため、入力軸18の回転数Ninがマイナスのシンクロ判定値A以下になればシンクロ機構36が正常に作動していると判定できるのである。シンクロ判定値Aは、出力軸14の回転数N0 、および第5速用歯車対28a,28b、歯車対20a,20bのギヤ比から求められる第5速変速段成立時の入力軸18の回転数よりも多少大きめ、すなわち絶対値としては小さめの値が設定され、シンクロ機構36が正常であれば回転速度センサ82の検出誤差などに拘らず回転数Ninが確実にシンクロ判定値Aを下回るようになっている。なお、図3の時間t1 はシフトチェンジ開始時間で、時間t2 はシンクロ正常時のシフトチェンジ完了時間である。
【0019】上記入力軸18はカウンタ軸12と常時噛合い回転させられ、その回転方向は反対向きであるため、入力軸18の回転方向が出力軸14の回転方向と同じであることは、第1軸であるカウンタ軸12の回転方向が出力軸14の回転方向と反対であることを意味し、ステップS5の実行内容は、カウンタ軸12が出力軸14と反対方向へ回転した場合にシンクロ機構36が正常である旨の判定を行うことと実質的に同じである。すなわち、このステップS5は判定工程で、本実施例ではカウンタ軸12すなわち第1軸が他方の軸に相当し、回転数Ninを検出する回転速度センサ82は回転検出手段に相当する。
【0020】上記ステップS5の判定がNOの場合、すなわち回転数Ninがシンクロ判定値Aより大きい場合にはステップS6を実行し、回転数Ninが予め設定されたシフト完了判定値B以上か否かを判断する。シフト完了判定値Bは、出力軸14の回転数N0 、およびリバース用歯車40a,40b、歯車対20a,20bのギヤ比から求められるリバース変速段成立時の入力軸18の回転数よりも多少小さめの値が設定され、シフトレバー37が完全にリバース位置へ切り換えられてリバース変速段が成立した場合、すなわちリバース用アイドル歯車38がリバース用歯車対40a,40bに噛み合った場合には、回転速度センサ82の検出誤差などに拘らず回転数Ninが確実にシフト完了判定値Bを上回るようになっている。このステップS6は前記シフトチェンジ完了判定手段90によって実行される。
【0021】そして、上記ステップS6の判断がYESの場合、すなわちNin≧Bの場合は、ステップS5の判断がYESとなること無くリバース変速段が成立したことを意味し、ステップS12でリバースシンクロ無しの判定が為される一方、ステップS6の判断がNOの場合はステップS7を実行する。ステップS7では、テスト時間Tが設定時間Tmax に達したか否かを判断し、設定時間Tmax に達するまでは前記ステップS4以下の実行を繰り返す。設定時間Tmax は、作業者がスタート釦を押圧操作した後、シフトレバー37のリバース位置への切換操作が完了するまでに必要な時間で、手動変速機10の機差などを考慮して余裕を持って定められ、ステップS5およびS6の判断が何れもYESとなること無くT=Tmax となった場合には、ステップS13で再テストの判定が為される。前記ステップS4における回転数Ninの取込み周期は例えば5ms程度で、その取込み周期と同じサイクルタイムでステップS4以下が繰り返し実行されることにより、シフトレバー37の操作速度のばらつきに拘らずステップS5で一時的なNin≦Aを確実に検出できるようになっている。
【0022】一方、前記ステップS5の判断がYESとなった場合、すなわちNin≦Aとなった場合には、ステップS8で前記ステップS4と同様に回転速度センサ82から入力軸18の回転数Ninを表す検出信号を取り込み、ステップS9で前記ステップS6と同様にしてNin≧Bか否かを判断する。回転数Ninがシフト完了判定値Bより小さい場合には、ステップS10で前記ステップS7と同様にしてT=Tmax か否かを判断し、テスト時間Tが設定時間Tmax に達するまではステップS8以下を繰り返す。そして、ステップS9の判断がYES、すなわちリバース位置への切換操作が完了してNin≧Bとなった場合には、ステップS11でリバースシンクロ有りの判定が為され、ステップS10の判断がYESとなった場合、すなわちテスト時間Tが設定時間Tmax に達した場合には、ステップS5のYES判断に拘らずステップS13で再テストの判定が為される。
【0023】ステップS11,S12,S13では、例えばランプの点灯やブザーなどの表示手段によって作業者に判定結果を知らせるようになっており、これにより、1台の手動変速機10に対するリバースシンクロ機構の有無に関する一連の検査が終了する。
【0024】このように、本実施例では出力軸14を回転駆動しながらシフトレバー37をニュートラル位置からリバース位置へ切り換える際に、シフトチェンジが完了する前に入力軸18の回転数Ninが一時的にシンクロ判定値Aを下回ったか否かによってリバースシンクロ機構の有無が自動的に判定されるため、作業者の負担が大幅に軽減されるとともに、作業者の感により経験的に判定していた従来の場合に比較して、手動変速機10の機差などに拘らず高い検査精度が得られる。これにより、新人や初心者でも容易にリバースシンクロ機構の検査を行うことが可能となる。
【0025】また、上記シンクロ判定値Aはシンクロ機構36が完全係合した場合の入力軸18の回転数に基づいて設定されているとともに、Nin≦Aとなり且つその後テスト時間Tが設定時間Tmax に達する前にNin≧Bとなった場合にリバースシンクロ有りの最終判定が為されるため、検査精度が更に高くなり検査結果に対して高い信頼性が得られる。
【0026】また、回転速度センサ82によって入力軸18の回転数Ninを検出しているとともに、計測ユニット86は5ms程度のサイクルタイムで回転数Ninを表す検出信号を取り込むようになっているため、シフトレバー37の操作速度のばらつきに拘らずステップS5で一時的なNin≦Aが確実に検出され、この点でも高い検査精度が得られる。すなわち、入力軸18の回転数Ninは、シフトレバー37の操作速度が速ければ図4の(a)に示すような波形となり、操作速度が遅い場合には同図の(b)に示すような波形となるが、何れの場合でも一時的なNin≦Aを確実に検出できるのである。
【0027】なお、図1の検査装置は手動変速機10をアッシー段階で総合的に検査するもので、上記のようにリバースシンクロ機構の有無を検査するだけであれば、クラッチ72,78、駆動モータ74、回転速度センサ84は必ずしも必要でなく、出力軸14を回転駆動する駆動モータ80および入力軸18の回転数Ninを検出する回転速度センサ82を備えておれば良い。また、上例では出力軸14をマイナス方向へ回転駆動するようになっていたが、逆のプラス方向へ回転駆動するようにしても良いことは勿論、駆動モータ74により入力軸18を回転駆動しながら回転速度センサ84により出力軸14の回転方向や回転数を検出してリバースシンクロ機構の有無を検査することもできる。
【0028】以上、本発明の一実施例を図面に基づいて詳細に説明したが、本発明は他の態様で実施することもできる。
【0029】例えば、前記実施例の手動変速機10は入力軸18からカウンタ軸12に回転力が伝達されるようになっていたが、カウンタ軸12がそのまま入力軸になっているものなど、リバースシンクロ機構を有する種々の形式の手動変速機の検査に本発明は同様に適用され得る。
【0030】また、前記実施例ではカウンタ軸12側の歯車28aが遊動歯車で出力軸14側の歯車28bが固定歯車であったが、逆に歯車28aをカウンタ軸12に固定するとともに歯車28bを出力軸14に相対回転可能に配設し、シンクロ機構36を出力軸14側に設けるようにしても良い。その場合は出力軸14が第1軸でカウンタ軸12が第2軸に相当する。
【0031】また、前記実施例では第5速用の歯車対28a,28bが遊動歯車,固定歯車を兼ねているとともに第5速用のシンクロ機構36にリバースシンクロ機構が組み込まれていたが、変速用歯車とは別に遊動歯車および固定歯車を配設したり、リバース切換時専用のリバースシンクロ機構を配設したりしても良い。図6のシンクロ機構36はあくまでも一例である。
【0032】また、前記実施例では作業者が駆動モータ80を作動させたりシフトレバー37を切換操作したりしていたが、シフトレバー37を自動でニュートラル位置からリバース位置へ切り換えるシフト切換手段を設けるなどして、作業者がテスト開始スイッチを押圧操作するだけで計測ユニット86が自動で駆動モータ80を作動させたり、シフトレバー37をリバース位置へ切り換えさせたりすることもできる。回転速度センサ84から取り込んだ出力軸14の回転数に基づいて、予め設定された手動変速機10の変速比などから前記判定値A,Bが自動設定されるようにしても良い。
【0033】また、前記実施例では計測ユニット86により自動でリバースシンクロ有無の判定が為されるようになっていたが、例えば図3に示すようなタイムチャートがブラウン管などの表示装置に表示されるようにして、その波形から作業者が異常の有無や原因などを判定できるようにしても良い。
【0034】また、前記実施例では入力軸18の回転数Ninが、シンクロ機構36が完全係合した場合の入力軸18の回転数に基づいて設定されたシンクロ判定値A以下となったか否かによって良否判定を行っていたが、入力軸18の回転方向が同じか否か、すなわち回転数Ninがマイナス、或いは誤差などを考慮して0より少し小さい所定の判定値以下か否かによって良否判定を行うようにしても良い。
【0035】また、前記実施例ではNin≦Aとなり且つその後テスト時間Tが設定時間Tmax に達する前にNin≧Bとなった場合にリバースシンクロ有りの最終判定が為されるようになっていたが、回転数Ninがシンクロ判定値A以下となったか否かだけでリバースシンクロ機構の良否判定を行うようにしても良い。
【0036】また、前記実施例では駆動モータ80により出力軸14を回転駆動した状態でリバースシンクロ機構の有無を検査するようになっていたが、クラッチ78を遮断するなどして出力軸14が惰性回転している状態でシフトレバー37を切り換えて検査することもできる。
【0037】その他一々例示はしないが、本発明は当業者の知識に基づいて種々の変更,改良を加えた態様で実施することができる。
【図面の簡単な説明】
【図1】本発明方法を好適に実施できる検査装置の構成図である。
【図2】図1の検査装置を用いてリバースシンクロ機構の有無を検査する際の手順を説明するフローチャートである。
【図3】図1の検査装置を用いてリバースシンクロ機構の有無を検査する際の出力軸回転数および入力軸回転数の変化を示すタイムチャートの一例である。
【図4】図1の検査装置を用いてリバースシンクロ機構の有無を検査する際のシフトレバーの操作速度が異なる場合の入力軸回転数の変化を比較して示すタイムチャートの一例である。
【図5】リバースシンクロ機構を有する手動変速機の一例を説明する骨子図である。
【図6】リバースシンクロ機構の一具体例を示す断面図である。
【図7】図6のリバースシンクロ機構のスプラインが当接した状態を示す図である。
【符号の説明】
10:手動変速機
12:カウンタ軸(第1軸)
14:出力軸(第2軸)
16:アイドル軸(第3軸)
28a:第5速用歯車(遊動歯車)
28b:第5速用歯車(固定歯車)
36:シンクロ機構(リバースシンクロ機構)
37:シフトレバー
38:リバース用アイドル歯車
40a,40b:リバース用歯車
80:駆動モータ(回転駆動手段)
82:回転速度センサ(回転検出手段)
ステップS1:回転駆動工程
ステップS2:切換工程
ステップS5:判定工程
【特許請求の範囲】
【請求項1】 互いに平行な第1軸および第2軸と、該第1軸および第2軸と平行な第3軸まわりに回転可能に配設され、シフトレバーがリバース位置へ操作されることにより、該第1軸および第2軸にそれぞれ設けられた一対のリバース用歯車と噛み合わされて該第1軸および該第2軸を同じ方向へ回転させるリバース用アイドル歯車と、前記第1軸に相対回転可能に設けられた遊動歯車と、前記第2軸に一体的に設けられて一体回転させられるとともに、前記遊動歯車と噛み合わされた固定歯車と、前記遊動歯車と前記第1軸との間に設けられ、前記シフトレバーがニュートラル位置に操作された状態では該遊動歯車と該第1軸との相対回転を許容するが、該シフトレバーが該ニュートラル位置から前記リバース位置へ切換操作されると、前記リバース用アイドル歯車が前記リバース用歯車と噛み合う前に一時的に該遊動歯車と該第1軸とを係合させるリバースシンクロ機構とを有する手動変速機において、前記リバースシンクロ機構が正常に作動するか否かを検査する方法であって、前記シフトレバーがニュートラル位置に保持されている状態で、前記第1軸および第2軸の何れか一方を回転駆動手段によって回転駆動する回転駆動工程と、前記一方の軸が回転させられた状態で前記シフトレバーをリバース位置へ切り換える切換工程と、前記第1軸および第2軸の他方の回転方向を回転検出手段によって検出し、前記シフトレバーがリバース位置へ切り換えられる過程で該他方の軸が前記回転駆動手段による一方の軸の回転方向と反対方向へ回転したか否かを判断し、反対方向へ回転した場合に前記リバースシンクロ機構が正常に作動していると判定する判定工程とを有することを特徴とするリバースシンクロ機構の検査方法。
【請求項1】 互いに平行な第1軸および第2軸と、該第1軸および第2軸と平行な第3軸まわりに回転可能に配設され、シフトレバーがリバース位置へ操作されることにより、該第1軸および第2軸にそれぞれ設けられた一対のリバース用歯車と噛み合わされて該第1軸および該第2軸を同じ方向へ回転させるリバース用アイドル歯車と、前記第1軸に相対回転可能に設けられた遊動歯車と、前記第2軸に一体的に設けられて一体回転させられるとともに、前記遊動歯車と噛み合わされた固定歯車と、前記遊動歯車と前記第1軸との間に設けられ、前記シフトレバーがニュートラル位置に操作された状態では該遊動歯車と該第1軸との相対回転を許容するが、該シフトレバーが該ニュートラル位置から前記リバース位置へ切換操作されると、前記リバース用アイドル歯車が前記リバース用歯車と噛み合う前に一時的に該遊動歯車と該第1軸とを係合させるリバースシンクロ機構とを有する手動変速機において、前記リバースシンクロ機構が正常に作動するか否かを検査する方法であって、前記シフトレバーがニュートラル位置に保持されている状態で、前記第1軸および第2軸の何れか一方を回転駆動手段によって回転駆動する回転駆動工程と、前記一方の軸が回転させられた状態で前記シフトレバーをリバース位置へ切り換える切換工程と、前記第1軸および第2軸の他方の回転方向を回転検出手段によって検出し、前記シフトレバーがリバース位置へ切り換えられる過程で該他方の軸が前記回転駆動手段による一方の軸の回転方向と反対方向へ回転したか否かを判断し、反対方向へ回転した場合に前記リバースシンクロ機構が正常に作動していると判定する判定工程とを有することを特徴とするリバースシンクロ機構の検査方法。
【図7】


【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開平8−166326
【公開日】平成8年(1996)6月25日
【国際特許分類】
【出願番号】特願平6−310560
【出願日】平成6年(1994)12月14日
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(594203922)コサカ精機株式会社 (1)
【出願人】(000176958)三明電機株式会社 (37)
【公開日】平成8年(1996)6月25日
【国際特許分類】
【出願日】平成6年(1994)12月14日
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(594203922)コサカ精機株式会社 (1)
【出願人】(000176958)三明電機株式会社 (37)
[ Back to top ]