
リフトアクチュエータ
多様なリフトシステムに利用するための改良された電気的リフトアクチュエータであって、様々な荷重範囲にわたり互換性のある部品によってユニバーサルデザインを可能にする様々な改良点を含むものである。このユニバーサルデザインはさらに追加的な特徴および機能(例えば、ロードセル位置の改良、オペレータ検知およびオペレータペンダント内の電気信号/エアチャンネルの改良、オペレータ力検知の信頼性向上およびオペレータ力検知に対するコストの減少)を可能にする。さらに、前記ユニバーサルデザインは回転駆動アセンブリに組み合わされており、荷重検出とワイヤロープの弛み検出およびケーブルリミット検出は、非接触センサ等のような改良されたコンポーネントと技術を使用することで達成される。開示された多くの改良点はコストを削減し性能を向上させ、アクチュエータの性能や信頼性を拡張することに加えて、アクチュエータを様々な用途および荷重範囲に渡って共通な設計にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は改良されたリフトアクチュエータに関し、特に多様なリフトシステムにおいて利用するための電気リフトアクチュエータに関する。当該アクチュエータは、コストを削減し、アクチュエータ、エンドイフェクタおよびコンポーネントを様々な用途および/または荷重範囲に渡って共通な設計にすることに加えてアクチュエータの性能の向上(例えば全体的な最大能力の向上)および信頼性を向上させる。
【背景技術】
【0002】
電気リフトアクチュエータの使用はマテリアルハンドリング産業において周知である。電気リフトは特に有用で、荷重を持ちあげて運ぶパーソナルリフトデバイスに様々なリフト能力を提供するために、様々な態様で利用されている。このようなデバイスの例にはGorbel G−Force(登録商標)およびEasy Arm(登録商標)システムがある。
【0003】
さらに具体的には、本発明はバランサーまたはリフトと呼ばれるマテリアルハンドリングデバイスの分野に関する。それらのデバイスは、一端がプーリに固定されてプーリが回転するときにプーリの周りを包むように巻かれるケーブルまたはラインを備えるモータで駆動するリフトプーリ、ケーブルの他端(自由端すなわち固定されていない端)に取り付けられるであろうエンドイフェクタまたはペンダント形式のオペレータ用コントローラ、または同様の電気機械的デバイスを備える。エンドイフェクタは持ち上げられる荷重に接続されているコンポーネントを備え、プーリの回転がラインを巻き取るまたは送り出すことによってエンドイフェクタに接続されている荷重は持ち上げられ、または下ろされる。1つの動作モードで、アクチュエータはプーリにトルクを与え、持ち上げられている物の重力に正確に等しい上向きのライン力を生成し、ラインの張力はほぼ持ち上げている物の重さとバランスされている。従って、オペレータがそのものを動かすために必要な力はその物の加速度力だけである。
【0004】
この種のシステムの1つのシステム分野おいて、これらのデバイスは人間の力または動作を測定し、当該測定値に基づいてアクチュエータ(空気(圧)駆動装置または電気駆動装置)によって与えられる速度または力を変化させる。このようなデバイスの例は、米国特許第4,917,360号(発明者Yasuhiro Kojima)、米国特許第6,622,990号および米国特許第6,386,513号(発明者Kazerooni)に開示されている。米国特許第6,622,990号(発明の名称HUMAN POWER AMPLIFIER FOR LIFTING LOAD WITH SLACK PREVENTION APPARATUS、発明者Kazerooni)は2003年10月23日に発行されている。このデバイスや類似のデバイスにおいて、人間がエンドイフェクタを上方に押したときプーリは回転し、荷重を持ち上げる。そして、人間がエンドイフェクタを下方に押したときプーリは逆方向に回転し荷重を下ろす。このような操作は「フロートモード」としばしば呼ばれるものにおいて見受けられる。フロートモードではオペレータが荷重に上方または下方への力を与えることによって、システムによってアシストされた(補助された)荷重の動きが得られる。
【発明の開示】
【0005】
本明細書で開示される実施例は、従来の電気モータとリフトシステムに様々な改良を提供するように構成されている。概していえば、改良された構成によってアクチュエータ構造の標準化が容易にでき、製造に必要な部品の数は減少し、幅広いリフトシステムに用いることができる。それによって、様々な荷重リフト範囲をもつ様々なアクチュエータ間の変えるべき部品が少なくなる(共通部品が多くなる)。上記のように構成した場合には、制御(装置)の信頼性、点検整備の容易性、拡張性を向上するために、アクチュエータおよびそれに関連するユーザコントローラ(例えばオペレータコントロールペンダント)内の様々なコンポーネントの変更が必要となる。
【0006】
本明細書で開示される実施例はリフトアクチュエータであって、このリフトアクチュエータはコントローラと、電気モータと、オペレータインタフェースを備える。当該電気モータはコントローラからの制御信号に応じて動作する。また、当該電気モータは、一端がドラムに固定されているワイヤロープを巻いたり送りだしたりするドラムを回転させるためのアクチュエータを駆動させるものである。当該オペレータインタフェースはワイヤの自由端の近傍に取り付けてあり、脱着式のリフト工具を備える。また、当該オペレータインタフェースは、アクチュエータの動作を制御する信号をオペレータからコントローラへ与える。
【0007】
本発明で開示される実施例は、フレームと、荷重センサと、弛みセンサと、モータおよび減速アセンブリと、遊星歯車減速機と、ケーブルガイドと、調整可能なケーブルリミットセンサとを備える。当該フレームは、モータ、機械的減速ギアおよびドラムを回転可能に吊下げるものである。当該荷重センサは、当該フレームに取り付けられ、ワイヤロープの巻き取られていない方の端に荷重がかかるときにモータ/減速機/ドラムアセンブリの回転によって発生する荷重の検出を行う。当該弛みセンサは1つの実施例において回転アセンブリに設けられ、モータ/減速機/ドラムの方位角を検出し、当該弛みセンサからの信号に応じて弛みの存在を判定する。当該ユニバーサルモータ減速アセンブリは、アクチュエータの持ち上げ能力範囲を変更するための複数の追加的減速機に設けられる。当該遊星歯車減速機の物理的配置はワイヤローププーリ(の)ドラムに閉じ込められているような配置である。当該ケーブルガイドは、ドラムから巻き取り中または送り出し中のケーブル位置の制御を行い、巻き(張り)が適正になるように維持を行う。当該調整可能なケーブルリミットセンサは、ケーブルが巻き取られているときおよび送り出されているときにケーブルガイドの極端な軸方向移動に応答してトリガされる。当該ケーブルガイドは、ケーブルが巻き取られているときおよび送り出されているときにドラムの溝に係合し、ガイドを動かす横方向の力を与えるための複数のねじ山(凸部)を備える。当該溝はドラム上でのワイヤロープの位置決めを可能とするので、ドラム上のワイヤロープの正確な単層配置が可能になる。
【0008】
オペレータインタフェースのその他の実施例に関連して開示されるものには、ハンドルと、ピボット運動可能な(ある点を中心に回転できる)カップリングと、コイルセンサと、液晶ディスプレイと、近接非接触光学センサと、クイックディスコネクトアタッチメントがある。当該カップリングは、電気的接触およびエアチャンネルまたはコンジットを提供するのに適した平たいスリップリングを介してインタフェースをワイヤロープに取り付けるものであるが、インタフェースのロープに対する360度回転は可能である。当該コイルセンサは、可撓な線材によってコイルの中を通っているコアと結合している当該ハンドルの変位の垂直方向成分を検出する。当該液晶ディスプレイは、当該インタフェース上にあってオペレータに状態情報を表示する。当該近接非接触光学センサは、操作の間ハンドル上にオペレータの手が存在するかの感知を行う。バヨネットタイプまたはピンタイプの当該クイックディスコネクトアタッチメントはインタフェースの下部に取り付けるべき工具のためアタッチメントである。
【発明を実施するための形態】
【0009】
以下は各々の電気式リフトアクチュエータの様々な改良に関するもので、実施例として説明されている。しかし、様々な改良は、通常、他のタイプのアクチュエータまたは他の荷重ハンドリング装置にも使用または実施することができ、本明細書で開示されている電気モータまたはリフトシステムに特に限定されるものではない。図は測られることを想定しておらず、いくつかの形状に関しては明確さを向上させるために拡大して表わされている。
【0010】
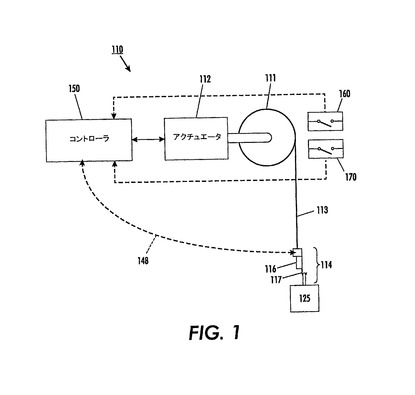
図1を参照すると、本発明の実施例が概略構成として示されており、例示的な人間パワーアンプ110内の巻き取り装置または駆動プーリおよび付随する機械的アセンブリが示されている。デバイスの上部ではアクチュエータ112によって駆動される巻き取りプーリ111が天井部、壁部、またはオーバーヘッドクレーン、オーバーヘッドアームまたは同様の構造(図示せず)に直接取り付けられている。プーリ111に巻かれているのは、一端がプーリに取り付けられ、他端が荷重を接続するために自由になっているラインまたはケーブル113である。ワイヤロープとも称されるケーブル113はプーリが回転すると荷重125を持ち上げまたは下げることができる。ライン113はいかなるタイプのライン、ワイヤ、ケーブル、ベルト、ロープ、ワイヤ・ライン、コード、より糸、ストリング、チェーンまたはその他のプーリまたはドラムが巻き取ることができ、荷重を持ち上げる力を与えることのできるものでもよい。ライン113に取り付けてあるのはエンドイフェクタ114で、ヒューマンインタフェースサブシステム(例えばハンドルまたはペンダント116)および荷重インタフェースサブシステム117を含む。本実施例においてこれらは取り外し可能なJ型フックを含むが、一組の吸着カップまたは同様の荷重把持ができるものも含んでもよい。図示していないが、吸着カップの実施例には吸着カップに負圧を供給するための空気ホースも含まれる。
【0011】
1つの実施例において、アクチュエータ112は変速機を備えた電気モータであるが、別の実施例として変速機を持たない電気式駆動によるモータとすることもできる。さらに、アクチュエータ112は空気(圧)駆動、油圧駆動あるいはその他の方式で駆動できる動力を動力とすることができる。本実施例では、変速機は、例えばギア、プーリ等のような、ラインの張力を増加または減少させる機械的デバイスである。プーリ111はドラムまたはウインチのような、アクチュエータ112が与える回転的または角度的運動をライン113が上下する垂直方向の運動に変換する任意のメカニズムによって置き換えることができる。この実施例において、アクチュエータ112は持ち上げプーリに直接的に動力を与えるが、アクチュエータ112を異なる場所に設置し、プーリにチェーンおよびスプロケットの様な代替の伝達システムを経由して動力を伝達させることもできる。アクチュエータ112は信号ケーブル(図示せず)、ワイヤハーネスまたは同様の信号伝送手段でエンドイフェクタ114から信号を受信する電気的コントローラ150に応じて動作するのが好ましい。電気信号を伝送する様々な方法が存在し、伝送手段は無線伝送を含むその他の信号伝送手段(例えばRF、光学的伝送手段、その他)にしてもよい。本発明の1つの実施例においては、コイル状の制御用配線および/または空気路が特別に成形され、コードがその形状を保つことができる特別なコイルコード148(ロープ113を囲むように輪状に巻かれたもの)でもよい。
【0012】
オペレータコントローラに加えて1つまたは複数のセンサが使用され得、システムに機能性および/または安全性を与える。例えば、コントローラ150は、弛みセンサ160のようなセンサ(例えばスイッチ等)、ケーブルリミットセンサ170、ロードセル1170(例えば図10、図11の様なもの)またはオペレータ存在検知センサ1710(図17)からの入力を受信する。
【0013】
実施例においてコントローラ150は3つの主要コンポーネントを備える。
【0014】
1.入出力可能なアナログ回路、デジタル回路および/またはコンピュータおよび一般的な周辺機器を含む制御電気回路である。この制御回路構成の機能は、様々な入力から得られた情報を処理し、アクチュエータの制御(パワーアンプを経由)のための制御信号を生成することである。
【0015】
2.制御回路からの命令信号に応答してアクチュエータに電力を送るパワーアンプ(荷重による力を示すロードセル等)である。通常、このパワーアンプは電源からの電力を受け、アクチュエータへ適切な電力を伝送する。パワーアンプによってアクチュエータ112に供給される電気的力(電流および/または電圧)は、コンピュータおよび/または制御回路において生成された制御信号によって決定される。当然であるが、リフトに必要な条件に基づいて様々なモータドライバアンプ構成が用いられる。1つの実施例において、モータドライバの組は製品番号8V1016.50−2.のB&R Automation社製のACOPOSサーボドライブが好ましい。別の実施例ではさらにこのドライブとの結合において用いられる異なるモジュールを使ってもよい。それは制御を完全にするCPU(ACOPOS 8AC140または8AC141)、I/O モジュール(8AC130.60−1)および同様の構成のようなものである。
【0016】
3.起こりうる事象の順序に応じて、システムを起動および停止させるための電気機械的または半導体リレー、スイッチ、センサから構成される論理回路である。例えば、リレーはコントローラかエンドイフェクタのどちらかに設けられた2つの押しボタンシステムによって、全体の操作を開始および停止するために使用される。リレーは電力供給がなくなった場合またはオペレータがシステムから離れたときに摩擦ブレーキ(図示せず)を作動させる。通常、用途に応じて様々な基本設計概念および細部の設計が論理回路に対して可能である。1つの実施例において論理回路はGorbel.Inc社によって製造・販売されているG−forceリフトにおいて使用されているものに類似している。
【0017】
米国特許第6,622,990号において詳細に示されているように、ヒューマンインタフェースサブシステム114は人間の手によって握られるように設計されており、人間が与えた力、すなわち人間(オペレータ)からヒューマンインタフェースサブシステム114に与えられた力を測定するように設計されている。1つの実施例において、人間が与えた力はロードセル1170(例えば図10及び図11)または以下で詳細に述べる類似した出力生成センサによって検出される。荷重センサにおいて生成される信号出力レベルは、人間によってエンドイフェクタに与えられた荷重に応じたものであり、支持されている荷重に加算され、またはそこから減じられる。
【0018】
以下で記述する荷重インタフェイスサブシステム117は、荷重との接合部として設計された取り外し可能またはカスタマイズ可能な機構で、把握、締め付け、またはその他様々なカスタマイズされた荷重把持デバイスを含む。インタフェイスサブシステムの構成は、荷重の形状および持ち上げ操作に関わるその他の要因に依存する。その他の荷重インタフェースは、フック117以外に、例えばインタフェイスサブシステムに接続される吸引カップ、様々なフック、クランプ、把持部およびそれらに類するものでもよい。重い物体を持ち上げるため、荷重インタフェイスサブシステムは複合的な(複数の)荷重インタフェース(複合的(複数の)フック、クランプ、把持部、吸引カップ、および/またはそれらの組み合わせ)からなり得る。
【0019】
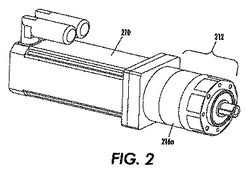
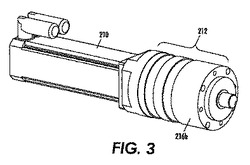
リフトシステムの構成要素を説明してきたが、ここから本発明の様々な特徴を説明する。1つの特徴はアクチュエータシステムの“ビルディングブロック構造”と呼ばれるものである。ビルディングブロック構造は図2から図6に概略的に示されており、そこで様々なビルディングブロック構造の特徴が示されている。ビルディングブロック構造において、リフトシステムの様々な構成要素(例えばアクチュエータ、ハンドル、ギア減速機等)は複数のモデルまたは複数のタイプのリフト(例えばEasyArm(登録商標)、G−Force(登録商標)等)において使用できるように構成されている。持ち上げ能力のような特性は注文毎に設定されるべきと考えられているので、当該デザインは解析され、どの構成要素が共有または共通に用いられ得るか、および注文ごとに選択されるべきものはどれか、が判定される。
【0020】
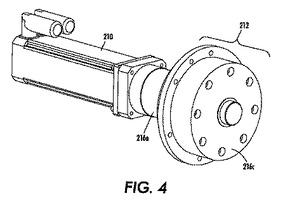
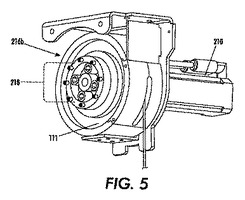
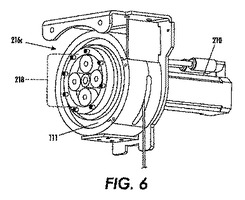
このような例の1つは図2から図4に示されている。例えば図2おいてはモータ210および付随する減速機212が用いられ、当該構成要素のどちらか一方または両方は、所定の持ち上げ能力の範囲を持つ様々なアクチュエータに亘って使用され得る。この例は図3および図4に示されている。低い能力のユニットにおいて、ドラムプーリインテグラルアダプタ216aはモータ/減速機アセンブリに取り付けられている。それ以外の減速装置は使用されていない。図3および図4を参照すると、ドラムプーリインテグラルアダプタ216aの代わりに図3では代替減速手段である減速機216bが取り付けてあり、図4では追加減速手段である減速機216cが取り付けられている。追加減速装置216bはモータ210が増加した荷重負荷の持ち上げを可能にするために設計/寸法決め(例えば図5の内部遊星歯車アセンブリ218)されている。図4を参照すると、減速機216cが取り付けられており、使用される追加減速機はモータ210に異なる荷重範囲の荷重を持ち上げることができるように設計/寸法決めされている。従って、ユニバーサルモータは複数のアクチュエータ荷重範囲に亘って使用でき、その場合加えられ/変更される主要コンポーネントは追加減速機である。
【0021】
今まで説明してきたように、図示された実施例は積み重なったビルディングブロック構造のギア減速機構を使用しており、減速アセンブリ216a、216bおよび216cは荷重保持能力が異なる。なぜなら内部遊星歯車218は異なるモデル間で様々に変更できるギア比を備えているからである。一番低い持ち上げ能力に対しては、単純なアダプタが追加的減速機の代わりに用いられている。最も重い持ち上げ能力に対しては第2のまたは積み重ねられた減速機が加えられ、第2減速機の構成はリフトアクチュエータに必要な能力に応じて選択される。異なるまたは代替的な減速機(および遊星歯車)アセンブリが使用されるとき、コントローラは同様に変更されるかまたは再プログラムされるので、モータ駆動特性は適切に調整され、アセンブリの変更された減速能力およびモータの回転の方向に対応できる。
【0022】
図2から図6に図示されているアクチュエータ駆動部の構成は、特定の用途のアクチュエータユニットの大量生産(個別の注文に対応できるような大量生産)を可能にし、さらに効果的な保守・点検や低い生産量におけるコストのかからない構成を容易にすると考えられる。図5および図6にも図示してあるが、様々な実施例はドラムプーリ111内部のギア減速構造も含む。遊星歯車減速機218はワイヤロープドラムプーリ111の内部にあり、減速機をドラムと直列に並べて設置する従来のシステムと対照的に、空間、重さおよびコストを節約する。また、クレーン梁のような外部構造から吊下げられているときのアクチュエータのバランスも向上させる。ドラム内部に減速機を設けることによってユニットはコンパクトとなり、ユニットの重さはドラム材料減少の故に(わずかに)減少している。ドラムを管材から従来方式で製造することによって、材料の固形ブロックを機械加工して製造するよりも減速機のコスト(価格)を減少させることができる。例えば、1つの実施例において、ドラムはアルミニウムの合金またはその代わりにナイロンまたはそれに類した適当な機械的性質をもった高分子化合物から製造してもよい。
【0023】
リフトシステムの分野の当業者には当然であるが、ここで開示している様々な実施例の重要な特徴は、リフトシステムの重量の減少である。リフトの持ち上げ能力の実質的な増加のためには、リフトの支持構造(例えばトラス、カンチレバーアーム、トロリー等)における増加した当該能力の影響を考慮するべきである。従って持ち上げ能力の増加を可能にする一方で、この能力向上を有効に利用するために持ち上げ装置自身の重量を減少させることも必要であろう。例えば、持ち上げ能力を25kg増やすならば、この改良されたリフトを使用するためには、支持構造が増加した能力を支えられることを保証する必要があるか、または構造体に支えられている全体的な重量を減少させる必要がある。後者は本明細書で開示される実施例の様々な特徴により達成される。アクチュエータ重量の減少によって、より多くの支持構造の能力を負荷重量のために使用することが可能になる。さらに、アクチュエータ重量の減少はリフトの移動(より少ないオペレータの労力(マニュアル)またはより小さいモータ(トロリー))を容易にする。
【0024】
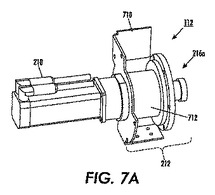
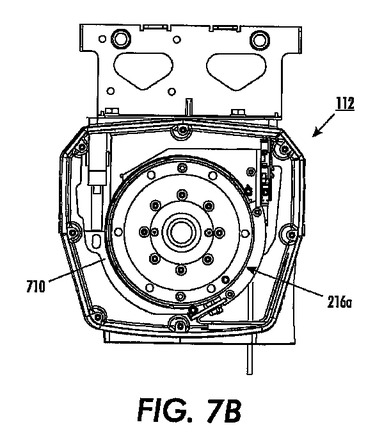
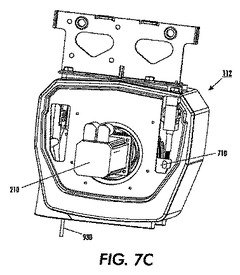
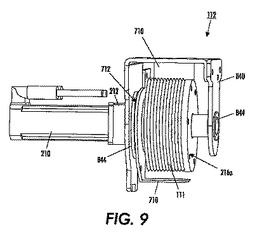
次に図7Aから図7Cまでおよび図8から図10までの構成を参照すると、アクチュエータ112の実施例の別の構成部品が示されており、アクチュエータに支持されている荷重は圧縮型ロードセルを用いて直接的に検出される。アクチュエータ112はさらにアーム710または同様の構造およびスリーブ712を含み、それらは互いに動作可能なように接続され、ドラムプーリ111と接続されている。1つの実施例において、アーム710はスリーブに取り付けられ、それによって本明細書において開示している荷重検出および弛み検出機能を実行できる面が提供(形成)され、および弛み状態中の積極的な回転停止を可能とする。例えば図9において図示されているように、スリーブ712はさらに追加減速機およびドラムプーリ111を支持し、ドラムプーリ111にはワイヤロープまたはケーブル930が巻きつけられていて、ケーブル930の一端はドラムプーリ111に取り付けられている。
【0025】
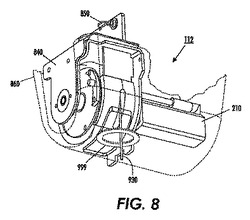
1つの実施例において、アクチュエータ112は超高分子量ポリマー摩耗リング999(ワイヤロープ930が通っているアクチュエータ下部のドーナッツ状の開口部)を使用する。摩耗リングを使用することにより従来のアクチュエータと比較して高い耐久性を得ることができる。異なる実施例において、アクチュエータの別の構成として、支持ブラケット(例えばアーム710)がアクチュエータ駆動構成要素および/またはカバーおよびハウジングに接続されている図8に示すような様式を変更することが考えられる。例えば、図10に示されている構成は、わずかに異なったアームおよびそれに関連する支持構造をアクチュエータにおいて使用している。
【0026】
アクチュエータ112はさらにセンターキャスティング840を含み、センターキャスティング840内でドラムまたはアクチュエータ駆動アセンブリの追加的減速機はベアリング844により支持されている。しかし、アクチュエータにおける荷重(アクチュエータ駆動コンポーネントの回転)を検出するためのロードセルを使用するため、ドラムプーリ111、スリーブ712、コイルコードサポートおよびアーム710を含む駆動アセンブリは、センターキャスティングに対しての回転的運動が制限的であっても可能であることが必須であると思われる。図8に示されているように、アクチュエータ112は、センターキャスティング840に接続されている支持部材850をさらに含み、それによってアクチュエータはトロリーまたはアームの様な支持構造(図示せず)から吊下げられている。また、アクチュエータ112はアクチュエータの動作部品を覆うケースまたはハウジング860(破断図として図8に示している)も含む。図示されたアクチュエータに適したハウジングの1つの実施例は、例えば米国意匠特許出願第29/256,812号において示されている。
【0027】
カバーを成型加工で製造する以外に、アクチュエータ112の更なるコスト削減は安価なカバーの使用で可能と考えられる。例えば、加工済みのシート状の金属またはプラスチックおよび所定形状の素材から製造されたカバーまたはカバー構成要素は、結果として非常に大きいコスト削減をもたらす。さらに、現在のシート形成技術によれば図8および当該意匠特許出願において部分的に示されている類の複雑な形状の形成が可能である。形成された金属カバーを使用する1つの実施例において、ゲートまたは開口部は同じように維持されるが、カバーのそれ以外の部分は形を変え、異なる材料や成型技術を使用できるようにすることもできる。
【0028】
改良された駆動部の共通設計に加えて、駆動および制御電子機器、例えば、B&Rオートメーション社が製造した製品番号8V1016.50−2のACOPOSサーボドライブのようなものは、さらに向上した入/出力能力およびプラグアンドプレイ構成要素として特徴づけられた設計改良を可能にする。アクチュエータ、ハンドル等の様々な構成要素のプラグアンドプレイ特性は、リフトに取り付けられているハンドルの種類をリフトコントローラ(図示せず)が認識することを可能とし、プログラム化された操作または入出力(I/O)を調整することを可能とする。従って、検出された構成要素は適切にそのハンドルと共に動作する。プラグアンドプレイ特性はハンドルタイプまたはアクチュエータタイプがその他のタイプへ変更されるときに機械的および電気的変更を行う必要があるという従来のリフトシステムにみられた課題を解消し、それによって時間およびコストのかかる改良を回避し、現場での変更および改良を実現可能とした。
【0029】
改良されたアクチュエータ112に付随するコントローラによって可能とされたその他の特徴は遠隔診断機能である。遠隔診断の実施例では、コントローラは通信回路装置を備え、情報はアクチュエータコントローラとその他のコンピュータデバイス(例えばワークステーション、クレーンコントローラ等)との間でネットワーク接続(LAN/WAN/Internet)を介して交換される。本発明の実施例によると、遠隔診断機能は、アクチュエータの様なリフトデバイスの遠隔設定および遠隔トラブルシューティングを可能とする。
【0030】
例えば、デトロイトにいる顧客が特定のアクチュエータに問題を抱えた場合に、アクチュエータのコントローラに遠隔地からアクセス可能(信頼できるネットワークIPアドレスまたは類似の識別子によって)か、または少なくとも遠隔地にあるコントローラからのデータをイーサネット、モデムおよび/またはインターネットを介して受信が可能である。そのことにより、チェックおよび設定変更ができ、動作の問題を解決することができる。技術者が修理地に行くまたはアクチュエータをサービス部門(部署)に送り返すという従来的な作業なしには、リフトのアフターサービスを完遂し、動作の問題の解決を現在はすることができない。そのため、遠隔診断および遠隔保守・点検・保全はシステム保守および修理コストを大幅に減少させるだろう。また、以上のことはユニットのダウンタイムを大幅に減少させるであろう。コントローラは、CANbusやその他の良く知られたデジタル通信技術のような一般的な通信プロトコルを使用でき、ログ情報および実行記録の伝送を含む基本的な診断機能が少なくとも実行・保存可能である。
【0031】
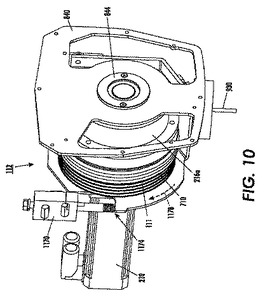
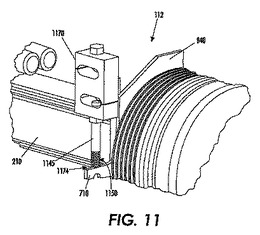
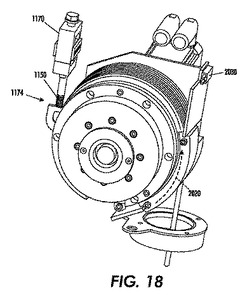
上述の通り、アクチュエータ112の構成は、駆動アセンブリがセンターキャスティング840に対して回転できるようにされている。このような構成は、更に詳しく図10及び図11に示されている圧縮ロードセル1170の使用を容易にする。従来の荷重バランスリフトにおいて、ロードセルは一般的に、荷重が加えられるまたは取り付けられるコントロールペンダントまたはエンドイフェクタの内部またはそれに付随して設置されていた。しかし、このようなシステムはより複雑な荷重センサ(張力および圧力を検出するセンサ)の使用を必要とし、荷重をコントロールするための所定のタイミングで正確なアクチュエータコントローラへの信号の返送を必要とする。また、ペンダントに設置されたロードセルの脱落があっても妥当な安全性を提供するために、さらに複雑でコストのかかるインターロック型のロードセル構成も必要とされる。ドラムセンタキャスティング840に圧縮型ロードセル1170を取り付けることにより、アーム710に与えられる回転力を検出することが可能となる。この回転力はケーブル930の自由端に吊下げられている荷重から生まれる。ロードセルがコントロールシステムに隣接して、アクチュエータ筐体内に配置してあるので、伝送経路がより短くなり、かつコントローラ150が受信する信号の品質が向上する(図1)。
【0032】
ロードセルを荷重経路外に移動することは、リフトデバイスの安全性を向上させる。なぜなら、ロードセルが壊れても荷重は落下しないからである。それ故、図10および図11において示されている構成はリフトシステムにおいてロードセルをリンクさせることなく、駆動アセンブリに隣接した場所での荷重の検出を可能にする。駆動アセンブリ(例えばドラムプーリ111、減速ギアボックス212、アダプタ/追加的減速機(216a,bまたはc)およびモータ210)において、アセンブリの構成要素はロールベアリング844上の軸回りに回転する。作動面1174はアーム710に付随しており、アーム710はスリーブ712に取り付けられており、ギア減速機212の設置面にボルトで取付けられている。圧縮型のロードセル1170は巻き上げ機のセンターキャスティング840に強固に取り付けられており、作動面1174から加えられる力を検出できる場所に設けられる。オペレータが吊下げられた荷重に手動で力を加えるとき、駆動機構は矢印1178の方向に回転し、ロードセルに加えられる力を変化させる。当該荷重が重くなれば、ロードセルによって検出される圧力は大きくなり、逆もまた然りである。図11に示されているように、力センサは小さい付勢スプリング1150をロードセルシャフト1145の端部に備え、これによってロードセルから離れているケーブルおよび/またはペンダントのデッドウエイトをバランスし、このことは後述するように弛み検出においても重要である。代替実施例において、本発明はモータの電流をコントローラおよび付随するソフトウェアによって監視することにより、ケーブルまたはそれに吊下げられたペンダントに加えられる荷重を導出することを意図している。
【0033】
リフトアクチュエータのその他の改良にはロードセル信号の調整が含まれる。ロードセル信号をこの実施例に対して有用にするための処理に加えて、ロードセル信号に対して単体の調整回路が使用され得ることがさらに本発明に含まれる。その場合、3個までまたは4個以上のロードセルが使用され得(例えば3つの異なる荷重範囲)、共通または共有の調整回路が使われ得る。当該共通な信号調整方法に代わるものは、別個の(複数の)回路を設け、異なったロードセルを制御し、ケーブルに吊下げられた、あるいは加えられた荷重に応じて生成された出力信号を処理するものである。
【0034】
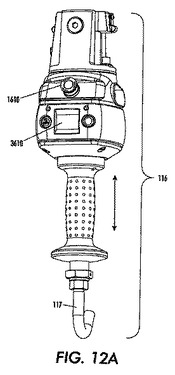
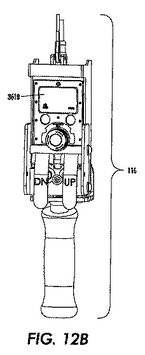
次に図12A、図12B、図13Aから図13Cおよび図14を参照する。図12Aはコントロールペンダント116においてのオペレータの意図を判定するための改良された電子機械的機構である。別の例として、図12Bに示してあるようなペンダントが本発明の装置をコントロールするために使われ得る。このようなペンダントの特徴・構造は、米国特許出願公開第2005/07872A1号(出願日2005年3月21日、出願人 M.Taylor他、米国特許出願番号第11/085764号)において開示されている。前述の両方のデバイスは様々な信号発生デバイス(視覚的、聴覚的、振動的)を使用し得、現在の操作状況またはオペレータのためのその他の情報を表示するための、液晶または類似のディスプレイ装置3610を備え得る。
【0035】
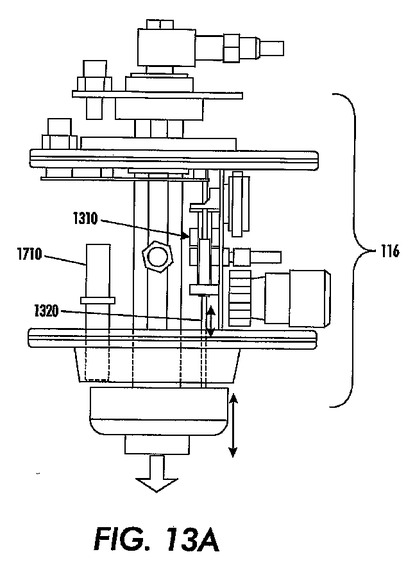
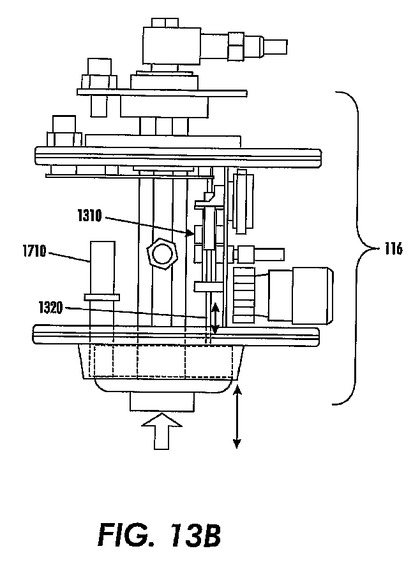
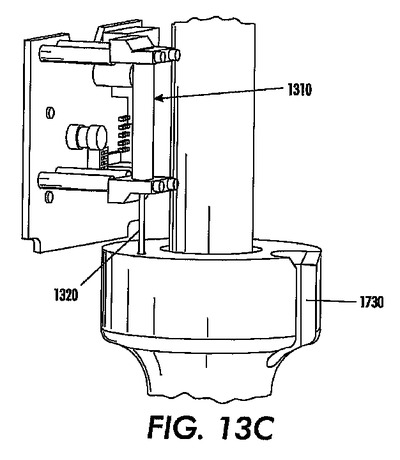
従来のLVDT(Linear Variable Displacement transducer)と比較して、図12A(図13Aから図13Cも参照)に示されている実施例において検出機構はコイル装置1310を使用する。この実施例において、当該コイルは金属ロッドまたは同様の部品からなるコアを感知し、オペレータの意図(持ち上げるまたは下ろす)を感知することに用いられる。図で示されている実施例になされる他の変形・改良は、ハンドルのスライド部分であるオペレータグリップ1716に当該コアを取り付けるための可撓な線材1320を使用することである。カスタムコイル装置を使用すると、市場入手可能なLVDTに比べて安価になる。さらに、コアをハンドルに接続する可撓な線材(例えばナイロンまたは同様のプラスチックまたは可撓な材料)を使用すると、荷重下でハンドルに限界を超えたトルクがかかる、あるいは限界を超えた回転が起きることによるコアのせん断破壊が防止され、完全な位置合わせをしていない場合のシステム障害が防止される。図13Aおよび図13Bに各々示されている上向きまたは下向きのオペレータ入力を判定するためには、LVDTまたは磁気センシングデバイスの使用も可能である。図13Aおよび図13Bに示されている実施例は、コイルに対するハンドルの各々の動き(下の長い矢印)を示している。
【0036】
ハンドルを介したオペレータ入力を感知するための他の装置は、例えば米国特許第6,386,513号(出願人Kazerooni、発明の名称「HUMAN POWER AMPLIFIER FOR LIFTING LOAD WITH SLACK PREVENTION APPARATUS」、公開日2002年5月14日)およびPCT国際公開公報第WO2005092954号(発明の名称「ELECTRONIC LIFT INTERFACE USING LINER VARIABLE DIFFERENTIAL TRANSDUCERS」公開日2005年10月16日)に記載されている。1つの実施例において、コントロールペンダントは、例えば出願中の米国意匠特許出願第29/256,811号において図示されているものに類似のものであり得る。
【0037】
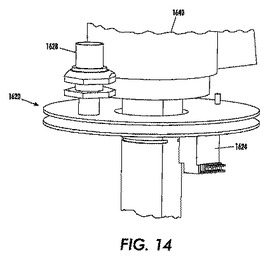
改良されたコントロールペンダントの他の実施例は、図14に示されている。ここでスリップリングは、コイルセンサ1320やパワースイッチ1610の出力、または電気コネクタ1624に存在する当該出力に関連する電気信号の、アクチュエータ112への正確性と信頼性のある伝送を、コネクタ1628に接続されたコントロールコイルケーブルを通して可能とするように構成されている。この構成は平たいスリップリングアセンブリ1620をコントロールハンドルに用い、ワイヤロープとコントロールコイルコードケーブルに無関係な360度の連続的な回転を可能とする。カスタムスリップリングは、回転するハンドルからコントロールコイルコードケーブルへ電気信号を通す。カスタムスリップリングアセンブリは、特に空気(圧縮空気および/または減圧空気)またはその他の加圧された流体がインレット1640から入って、当該カスタムスリップリングアセンブリの中央を通過することが可能なように構成されている。このことによって、オペレータはエンド工具(エンドイフェクタ)へエアパワー(空気力)を送り込み、当該エンドイフェクタを連続的な360度回転させることが可能である。
【0038】
スリップリングコンタクトは公知である。しかし、無制限な回転を容易にする統合された電気的および気体的コンジットの構成は、従来のリフト技術において使用されておらず、本改良されたペンダント構成の特徴である。エアコンジットは加圧された流体(例えば圧縮空気、減圧空気、油圧)をペンダントに付随する工具に移送することが可能であることが好ましい。改良された構成はペンダントの中の許容できる「ヘッドルーム」を適切なコストでさらに調整または減少させる。
【0039】
図13Aから図13Cを参照すると、ペンダント構成のその他の実施例が示されている。この場合、オペレータの存在(ハンドルの上の手)を誘電型、または好ましくは反射型光電子センサ1710を使用して感知する。1つの実施例において、センサ1710はチューブ状(筒状)の光電子センサ(金属、12mm、PNP)であり、オペレータの手が存在することを示す反射光を検出したときセンサ上の表示灯が切り替わる。様々な別なタイプのデッドマンスイッチが知られているが、それらの多くは堅いグリップまたはオペレータグリップ1716の握る部分が長いことが必要である。このような構成はオペレータを疲労させ、かつ混乱させてしまう。図13Aから図13Cまでに示されている構成は、巻き上げ機のオペレータのコントロールハンドルに接している手を検出する手段としての光電子センサである。これによって、ユーザ側の判断は必要なくなり、ユーザがユニットのオンオフの手段としてスイッチを使用すること避けることができる。手が接しているとき、当該センサはコントローラに信号を伝送するので、巻き上げ機を上方および下方に操作することができる。オペレータの手を検知するためのその他のセンサまたはスイッチは、公知の構成に類似した機械式のローラスイッチ、タッチセンサ、誘電型光学センサおよび膜センサを含む。上述したことで理解できるように、ペンダントボディ内でのセンサの設置場所は破損または意図に反する動作を避ける場所が好ましいが、ペンダントハンドルは隙間・開口部・切欠1730(これを通してオペレータの手の存在を検知できる)を備えなくてはならない。
【0040】
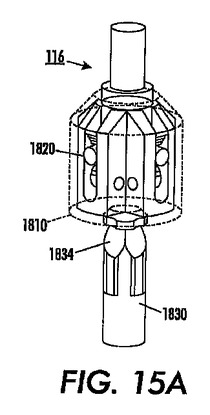
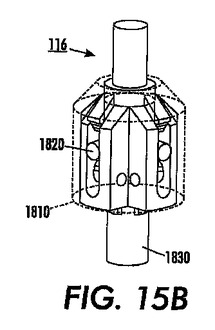
アクチュエータおよびコントロールペンダントの様々な使用において、現場では荷重インタフェースを交換または変更することが必要な場合もある。例えば、フックの代わりに、スレッドコネクタまたはそれに類したものを利用して荷重を持ち上げる必要があることもある。図15A及び図15Bを参照すると、そこに示されている構成はペンダントまたはエンドイフェクタ116の下にあるクイックディスコネクト(取り外しが簡単な)アダプタを含んでおり、そこにおいてオペレータはカラー1810を上にスライドさせることによってロックピン1820を内方に移動させ、工具取り付け軸1830を解放することによってエンドイフェクタを迅速に変更・交換することができる。その他の工具は、取り付け軸を取り付け穴にスライド係合させることによって、迅速および簡単に取り付けることができる。取り付け軸がスライドするとロックピンは内方に移動し、スライドが完了するとロックピンはシャンクにある溝1834を拘束し安全にロックされる。エンドイフェクタ変更・交換にはどんな工具も必要としない。
【0041】
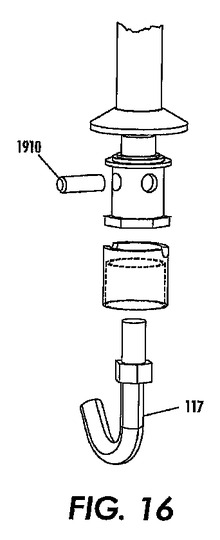
公知の溝連結技術が用いられ得ることや、工具を取り外すためにオペレータにピン1910(図16)の物理的な取り外しを必要とするその他の実施例が、本明細書に示されている様々な実施例の範囲に含まれていることを当業者は当然理解するだろう。
【0042】
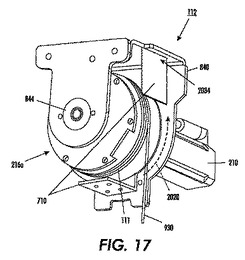
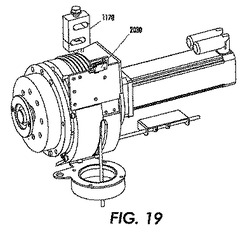
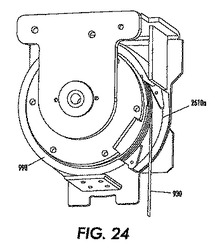
図17から図21を参照すると、改良されたケーブル弛み検出能力を備える本発明の実施例の特徴が示されている。改良された荷重検出に関して上記説明において示唆されているアクチュエータの実施例は、特に図17から図21に示されており、それはケーブルの弛みをドラム、ギア減速機およびモータ(駆動アセンブリ)の回転(たとえ逆方向回転でも)を用いて検出するものである。この構成において主駆動アセンブリ(ドラムプーリ111、ギアボックス(図示せず)およびモータ210)はロールベアリング844の軸上で回転する。作動板またはアーム710はスリーブに組みつけられ、スリーブは主ギアボックスの取り付け面にボルト付されていて、これらは駆動アセンブリとともに回転する。オペレータがワイヤロープ930に接続されているコントロールハンドルまたはその他の適切な工具以外のすべての重量を取り除いたときに弛みが誘発される。弛みが生じたとき、圧縮バネ1150(図11)によって補助されて、当該駆動アセンブリは反時計回り(矢印2020)に回転する。顧客による使用工具の変更を容易にするために、バネ力の調整のための機構は必要である。圧縮バネ1150はロードセル1170と作動板の面1174との間に設けられ、ロードセルに設置された荷重ピンまたはシャフトの同軸上にある。駆動アセンブリが無荷重または弛みのある状況で回転するとき、巻き取り機の主支持フレームに設けられたマイクロスイッチ2030は、当該作動板(図24)の存在を感知する。この感知はマイクロスイッチ2030が符号2034において作動板(図24)に接することで行われる。マイクロスイッチが作動すると、マイクロスイッチはコントローラ(図示せず)に信号を伝送し、その信号によってソフトウェアは巻き上げ機に上方に巻き上げることのみを可能にさせる。ユーザの安全のために、一度弛みが検知されたら、コントローラは巻き上げ機に下方にさらにワイヤロープを送り出させない。
【0043】
上述のことから理解できるように、荷重検出または弛み検出のための回転駆動アセンブリの使用は、荷重検出デバイスに任意のトルク荷重の監視、およびそれによるすべての荷重の検出を可能とし、ワイヤロープおよびコイルコード/エアホース両方が監視される。換言すれば、荷重センサには圧縮荷重がかかり、それが荷重の重さの直接の結果である。荷重が持ち上げられまたは下ろされるとき、コイルコード、エアホース、およびワイヤロープによる荷重保持の(依存)割合は変化するが、合計した荷重は変わらない。ワイヤロープおよびコイルコードアセンブリ全体は回転駆動アセンブリに支持されているので、ロードセルはそれらの全体の重さを常に感知しており、荷重の高さ位置の変化は荷重検出やフロートモード操作に影響を及ぼさない。内在的で有害な影響(例えばフロートモードにおけるバネ力およびコイルコードの重さの影響)は設置時の調整によって打ち消される。
【0044】
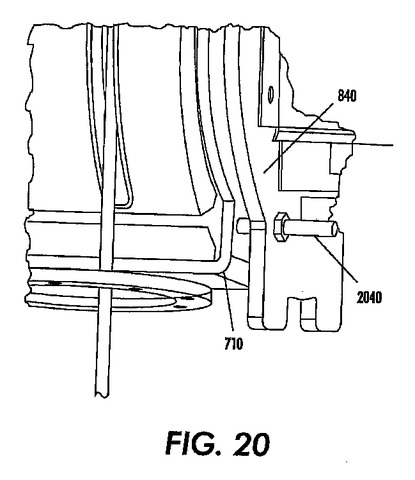
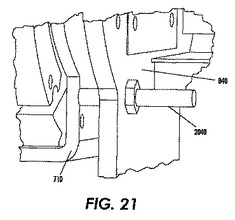
その他の実施例においては弛み状態を判定するためにモータの電流を監視するソフトウェアを利用する弛み検出を行ってもよい。しかし、このような方法は信頼できないという不安が残る可能性がある。機械的な接触スイッチ(ローラスイッチまたはそれに類したもの)に代えて、非接触近接センサ2040が板710の回転の検出に使われ得る。このような実施例は例えば図20および図21において示されており、弛み状態を判定するために板710の回転を検出することにセンサ2040が採用されている。
【0045】
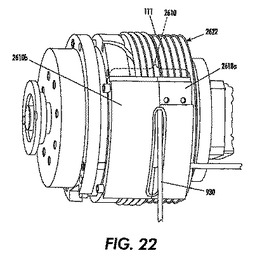
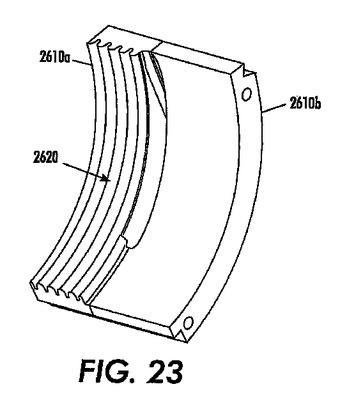
改良されたアクチュエータ112の様々なその他の特徴を以下で説明する。この特徴はドラムプーリおよびワイヤロープ(ケーブル)ガイド装置を含む。図22から図29を参照すると、改良された構成はツーピースのアセンブリ2610(2610a、2610b等)を使用している。そのアセンブリはワイヤロープまたはその他の持ち上げ媒体の周りにクランプ固定または組付けられていて、ドラムカバー998(図25)によるレールの上を前後にスライドする。アセンブリ2610のスライド移動はアセンブリの半分の部分にある凸部2620によって誘導され、符号2610aはワイヤロープドラムプーリ111の外溝2622内を動く。
【0046】
ロープ930の近傍に取り付けられているアセンブリ2610はスライドゲートまたは開口部を形成し(有し)、ワイヤロープ930はそこを通って、図24に示されているようにドラムから離れる(ほどかれていく)。このようなデバイスは、ケーブルおよびドラムを保護する役割に加えて、ドラム溝の側部の摩耗を防止し、ワイヤロープがドラムプーリにきつく(しっかりと)拘束されるように保ち、望まれない弛みの発生を防止する。換言すれば、ワイヤロープの横向きの力はゲートによって取り去られ、ケーブルはドラム表面を摩耗させない。なぜなら、(ゲート)入口において、ドラム溝に対するアラインメントは、すべての場合にほぼ完璧だからである。ゲート2610aの凸部の大きな荷重を受ける部分は大きな横向きの力を生み、それら力はドラムの多くの溝に分散される。なぜなら、横向きの力はワイヤロープがほぼ外にでて、ドラムの溝とゲートとのかみ合わせがゲートの凸部の最大数のときにのみ起こり得るからである。ゲートの当該半分をドラムに固定すると、ワイヤロープを交換するときにワイヤやドラムの位置関係が維持できる。
【0047】
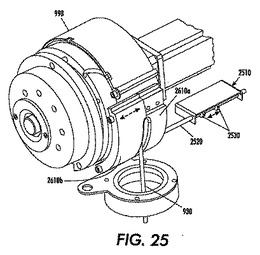
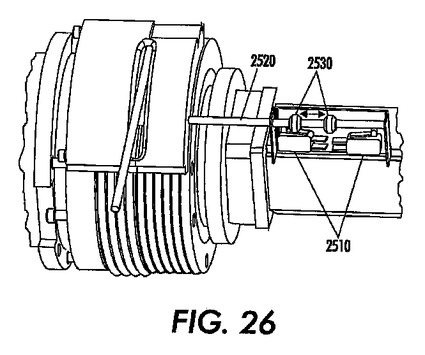
本実施例の他の特徴は図24から図29に具体的に示されていて、スライドゲート2610はケーブル送り出しの上限および下限の表示器として使うことができる。図25から図28において破線矢印で示されているように、ワイヤロープの巻き取りおよび送り出し時においてゲートはドラムプーリの回転によって前後にスライドする。図25および図26に示されているリミットスイッチ2510を追加する(設ける)と、例えばゲート2610の動きをロッド2520または同様の部材を介して、送り出し移動のリミットの確認に使用することが可能になる。以下で説明されるように、上記構成はシステム変更やワイヤロープの交換等の影響を受けないリミットスイッチの設定を可能にする。実際、ワイヤロープの最大送り出しに対するリミットスイッチは、新しいロープを取り付けるためによける必要があるが、ワイヤロープ交換のために取り外す必要があるのは、ワイヤロープの支持されている端近傍のゲート側面2610bのみである。ワイヤロープドラムプーリを前後に動かすためには、従来のボールスクリュ駆動機構が使われるか、もしくはドラムプーリの1つの溝を介してアイドル滑車を駆動させる機構が使われるような現在多くのGorbel社のアクチュエータで使われているものが用いられるだろう。
【0048】
図25および図26を特に参照すると、上で示したようなマイクロスイッチ2510を用いたリミット検知システムが示されている。図示された実施例は、ロッド2520で構成されている。ロッド2520は溝の切られたゲート(ゲート2610a)の動きによって前後に動く。ロッド上に設けられている2つの調整可能なシリンダ2530は所望の位置に移動し、そこに固定することが可能である(例えば固定ナットまたはそれに類したものによって)。ゲートが上限リミットおよび下限リミットの位置にあるときに、これらのシリンダはマイクロスイッチ2510に接する。ワイヤロープガイドまたはゲート機構が前後にスライドし、シリンダがセンサ2510に検知されると、信号はコントローラに送られ、ユニットの上限または下限の移動リミットのどちらかに到達したと判断される。移動リミットが検知されると、当該ソフトウェアは巻き上げ機に検知された目標物と逆方向の動作のみを可能とする(例えば上限が検知されたならば、巻き上げ機は下方にのみ動作する)。当該リミットはシリンダを動かすことによって調節できる。
【0049】
マイクロスイッチ機構は、その単純さという長所の故に好ましいと考えられる。しかし、センサを起動させるために必要な接触による力が不要で、構成要素の摩耗が防止できる、磁気非接触型センサの様な他の検出システムを使用してもよい。例えば、図27から図29に示されているように、磁気センサ3410は固定されたワイヤロープドラムカバー998に固定され得る。当該センサは、ワイヤロープガイド機構2610に設けられた2つの磁気目標物3420および3422に沿って移動可能に、ドラムプーリに接続されている。当該センサ目標物3420、3422は、一方がN極が向けられた磁石であり、他方はS極が向けられた磁石であり、前述したのと同様の移動リミット信号の提供に適している。その他の置換可能な移動リミットセンサとしては光学的またはその他の非接触型のセンサでもよいし、従来の機械的なセンサおよびスイッチでもよい。
【0050】
本明細書で開示されている様々な特徴や機能は、プログラムコードによるコントロールの下で作動するのに適したコントローラまたは同様の処理システムを使用して実行されるのが好ましい。1つの実施例は広範囲な特徴および機能のために予めロードされた性能を備えたコントローラ150(図1)を使用しており、1つまたは複数の特徴および機能はその後与えるコントローラへの命令または信号によってのみ実行可能になる。このように、アクチュエータ112(コントローラ150を含む)の汎用的な性質はさらに拡張できる。この全てのソフトウェア機能が予めロードされ、顧客が要求し、支払いをしたもののみが利用できる仕組みは、本発明が意図しているようなコンポーネントの互換性を高めると考えられる。このようなプロセスは、現場においてアクチュエータが取り付けられた後の機能の加増を可能にし、例えば顧客の要望または用途が変わった時にそのアクチュエータは追加的に特徴または機能を得ることができる。プラグアンドプレイコンポーネントが後でアクチュエータに取り付けられた場合において、そのアクチュエータは前述されたコンポーネントを認識するだけではなく、プログラム制御を変更し、新しく導入されたコンポーネントの使用を容易にすることも可能である。これらの改良は、特別なソフトウェアの変更および継続的なサポートの必要性を減らすもしくは無くしつつ、顧客の要求に応じたアクチュエータの迅速なカスタマイズを可能にする。
【0051】
図12Aに戻ると、オペレータコントロールペンダントすなわちエンドイフェクタ116のさらなる改良が示されている。図示した実施例において、ペンダント116には、簡単に利用できる情報をユーザへ示すことができる通信手段としての液晶ディスプレイ(以下LCDという)3610または同様の表示装置が取り付けられている。LCDに表示される情報は、システムの状態(すなわちシステムが使用できる状態か否か)等の基本的情報、荷重の様な高度なまたは追加的な情報、システム使用法および保守・点検情報(終了したサイクル数およびシステム保守・点検表示)や、プログラムモードにおいては、どの特徴が現在プログラムされているか(例えば仮想限界)のような高度なアドバイスおよびフィードバックが含まれる。
【0052】
LCDを使用することによって、別の情報をインストーラ(ユーザおよび保守スタッフ)に提供することができる。また、LCDに代えて従来的な発光ダイオード(以下LEDという)およびその他のものがアクチュエータの状態情報をオペレータに伝えるために使われ得る。
【0053】
さらに他の実施例において、例えば図25に示しているように、ワイヤロープは常にドラムプーリ111と、ドラムカバー998と、スライドゲート2610との間でしっかりと束縛されている。従って、アクチュエータのどこにも、ワイヤロープにおいても弛んだ部分を生じさせるような空間・隙間は存在しない。従って、支持端の滑落を抑制している限り、ワイヤロープに加わる圧力荷重もアクチュエータ112の弛みの生成または弛みの蓄積を生じさせない。実際には、プーリからワイヤロープが送り出され、当該アクチュエータまたはドラムハウジングから出る手前において、アクチュエータの内部で当該ゲートから出る手前でワイヤロープのごく一部が自由となっている可能性が高い。さらに径の大きいワイヤロープ(例えば直径0.25インチ(0.635センチ)のワイヤロープが良い。細い直径のロープより軸方向強さがあるからである。)は短い距離で非拘束になっているロープにおける輪(弛み)生成の可能性を減少させる。当業者はロープの直径がアクチュエータの荷重限界量の関数であり、0.025インチ(0.0635センチ)よりも小さくも大きくもなり得ることを理解するだろう。
【0054】
追加機能が電流制御において提供される場合、システムは起動中に1つまたは複数のハードウェア認識プロセスを実行し、得られた情報を特定の機能に対して比較する。このような情報を使用することで、システムは動作不能なサブシステム、または認識できないサブシステム、例えばハンドルが認識できないことまたはオペレータの存在検知が動作不能であることの様な問題を発見した場合に表示できる警告メッセージを生成する。
【0055】
ここで述べられた様々な実施例を対象とする共通設計において、本発明はソースコードプログラムの毎回の変更ではなく、柔軟な構成のセットアップのためのリアルタイムI/O(入出力)ポートを使用する。このようなシステムはユーザにコントローラ内のプログラムされた機能へのアクセスを可能とし、さらに迅速に特定の用途のユニットのI/Oを構築できる。アプリケーション設定の容易さおよび柔軟性のさらなる単純化を提供するソフトウェアインタフェースを設けても良い。
【0056】
開示してきた様々な特性およびその他の特徴、機能、またはそれらの代わりになるものは、多くのその他のシステムまたはアプリケーションに適宜に組み込まれると考えられる。また、様々な今後当業者によって行われるであろう現時点では予期されない代替、変形、または改良は特許請求の範囲に包含される。
【図面の簡単な説明】
【0057】
【図1】図1は本発明の実施例の概略図である。
【図2】図2は開示された実施例の様々な共通の設計特徴に従ったアクチュエータ駆動アセンブリの代替実施例(例えば異なった荷重支持能力)の図である。
【図3】図3は開示された実施例の様々な共通の設計特徴に従ったアクチュエータ駆動アセンブリの代替実施例(例えば異なった荷重支持能力)の図である。
【図4】図4は開示された実施例の様々な共通の設計特徴に従ったアクチュエータ駆動アセンブリの代替実施例(例えば異なった荷重支持能力)の図である。
【図5】図5は異なった荷重支持能力を有する代替実施例を示した遊星歯車アセンブリの典型例の図である。
【図6】図6は異なった荷重支持能力を有する代替実施例を示した遊星歯車アセンブリの典型例の図である。
【図7A】図7Aは開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図7B】図7Bは開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図7C】図7Cは開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図8】図8は開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図9】図9は開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図10】図10は開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図11】図11は開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図12A】図12Aは開示された発明に従って使用されているオペレータインタフェースデバイスの代替実施例の図である。
【図12B】図12Bは開示された発明に従って使用されているオペレータインタフェースデバイスの代替実施例の図である。
【図13A】図13Aは図12Aに示されているオペレータインタフェースデバイスの構成部品と動作例の図である。
【図13B】図13Bは図12Aに示されているオペレータインタフェースデバイスの構成部品と動作例の図である。
【図13C】図13Cは図12Aに示されているオペレータインタフェースデバイスの構成部品と動作例の図である。
【図14】図14は図12Aのオペレータインタフェースデバイスへの電気信号および気体(流体)の伝送に適したスリップリングアセンブリをの図である。
【図15A】図15Aは図12Aおよび図12Bのオペレータインタフェースデバイスの代替実施例の詳細図である。
【図15B】図15Bは図12Aおよび図12Bのオペレータインタフェースデバイスの代替実施例の詳細図である。
【図16】図16は図12Aと図12Bのオペレータインタフェースデバイスの代替実施例の詳細図である。
【図17】図17は本発明の特徴に従った潜在するワイヤロープの弛み状態を検出をする本発明の実施例の詳細図である。
【図18】図18は本発明の特徴に従った潜在するワイヤロープの弛み状態を検出をする本発明の実施例の詳細図である。
【図19】図19は本発明の特徴に従った潜在するワイヤロープの弛み状態を検出をする本発明の実施例の詳細図である。
【図20】図20は開示された発明において使用される他の弛み検出の実施例を示した図である。
【図21】図21は開示された発明において使用される他の弛み検出の実施例を示した図である。
【図22】図22は本発明の特徴に従った弛み防止を含む改良されたケーブル管理およびドラムカバーの特徴を示す詳細な図である。
【図23】図23は本発明の特徴に従った弛み防止を含む改良されたケーブル管理およびドラムカバーの特徴を示す詳細な図である。
【図24】図24は本発明の特徴に従った弛み防止を含む改良されたケーブル管理およびドラムカバーの特徴を示す詳細な図である。
【図25】図25は実施例の図であって、図22及び図23のケーブルゲートコンポーネントがケーブル移動リミットの検知に使用されている。
【図26】図26は実施例の図であって、図22及び図23のケーブルゲートコンポーネントがケーブル移動リミットの検知に使用されている。
【図27】図27は図22および図23のゲートを使用したケーブルの移動リミット検知の代替実施例の図である。
【図28】図28は図22および図23のゲートを使用したケーブルの移動リミット検知の代替実施例の図である。
【図29】図29は図22および図23のゲートを使用したケーブルの移動リミット検知の代替実施例の図である。
【技術分野】
【0001】
本発明は改良されたリフトアクチュエータに関し、特に多様なリフトシステムにおいて利用するための電気リフトアクチュエータに関する。当該アクチュエータは、コストを削減し、アクチュエータ、エンドイフェクタおよびコンポーネントを様々な用途および/または荷重範囲に渡って共通な設計にすることに加えてアクチュエータの性能の向上(例えば全体的な最大能力の向上)および信頼性を向上させる。
【背景技術】
【0002】
電気リフトアクチュエータの使用はマテリアルハンドリング産業において周知である。電気リフトは特に有用で、荷重を持ちあげて運ぶパーソナルリフトデバイスに様々なリフト能力を提供するために、様々な態様で利用されている。このようなデバイスの例にはGorbel G−Force(登録商標)およびEasy Arm(登録商標)システムがある。
【0003】
さらに具体的には、本発明はバランサーまたはリフトと呼ばれるマテリアルハンドリングデバイスの分野に関する。それらのデバイスは、一端がプーリに固定されてプーリが回転するときにプーリの周りを包むように巻かれるケーブルまたはラインを備えるモータで駆動するリフトプーリ、ケーブルの他端(自由端すなわち固定されていない端)に取り付けられるであろうエンドイフェクタまたはペンダント形式のオペレータ用コントローラ、または同様の電気機械的デバイスを備える。エンドイフェクタは持ち上げられる荷重に接続されているコンポーネントを備え、プーリの回転がラインを巻き取るまたは送り出すことによってエンドイフェクタに接続されている荷重は持ち上げられ、または下ろされる。1つの動作モードで、アクチュエータはプーリにトルクを与え、持ち上げられている物の重力に正確に等しい上向きのライン力を生成し、ラインの張力はほぼ持ち上げている物の重さとバランスされている。従って、オペレータがそのものを動かすために必要な力はその物の加速度力だけである。
【0004】
この種のシステムの1つのシステム分野おいて、これらのデバイスは人間の力または動作を測定し、当該測定値に基づいてアクチュエータ(空気(圧)駆動装置または電気駆動装置)によって与えられる速度または力を変化させる。このようなデバイスの例は、米国特許第4,917,360号(発明者Yasuhiro Kojima)、米国特許第6,622,990号および米国特許第6,386,513号(発明者Kazerooni)に開示されている。米国特許第6,622,990号(発明の名称HUMAN POWER AMPLIFIER FOR LIFTING LOAD WITH SLACK PREVENTION APPARATUS、発明者Kazerooni)は2003年10月23日に発行されている。このデバイスや類似のデバイスにおいて、人間がエンドイフェクタを上方に押したときプーリは回転し、荷重を持ち上げる。そして、人間がエンドイフェクタを下方に押したときプーリは逆方向に回転し荷重を下ろす。このような操作は「フロートモード」としばしば呼ばれるものにおいて見受けられる。フロートモードではオペレータが荷重に上方または下方への力を与えることによって、システムによってアシストされた(補助された)荷重の動きが得られる。
【発明の開示】
【0005】
本明細書で開示される実施例は、従来の電気モータとリフトシステムに様々な改良を提供するように構成されている。概していえば、改良された構成によってアクチュエータ構造の標準化が容易にでき、製造に必要な部品の数は減少し、幅広いリフトシステムに用いることができる。それによって、様々な荷重リフト範囲をもつ様々なアクチュエータ間の変えるべき部品が少なくなる(共通部品が多くなる)。上記のように構成した場合には、制御(装置)の信頼性、点検整備の容易性、拡張性を向上するために、アクチュエータおよびそれに関連するユーザコントローラ(例えばオペレータコントロールペンダント)内の様々なコンポーネントの変更が必要となる。
【0006】
本明細書で開示される実施例はリフトアクチュエータであって、このリフトアクチュエータはコントローラと、電気モータと、オペレータインタフェースを備える。当該電気モータはコントローラからの制御信号に応じて動作する。また、当該電気モータは、一端がドラムに固定されているワイヤロープを巻いたり送りだしたりするドラムを回転させるためのアクチュエータを駆動させるものである。当該オペレータインタフェースはワイヤの自由端の近傍に取り付けてあり、脱着式のリフト工具を備える。また、当該オペレータインタフェースは、アクチュエータの動作を制御する信号をオペレータからコントローラへ与える。
【0007】
本発明で開示される実施例は、フレームと、荷重センサと、弛みセンサと、モータおよび減速アセンブリと、遊星歯車減速機と、ケーブルガイドと、調整可能なケーブルリミットセンサとを備える。当該フレームは、モータ、機械的減速ギアおよびドラムを回転可能に吊下げるものである。当該荷重センサは、当該フレームに取り付けられ、ワイヤロープの巻き取られていない方の端に荷重がかかるときにモータ/減速機/ドラムアセンブリの回転によって発生する荷重の検出を行う。当該弛みセンサは1つの実施例において回転アセンブリに設けられ、モータ/減速機/ドラムの方位角を検出し、当該弛みセンサからの信号に応じて弛みの存在を判定する。当該ユニバーサルモータ減速アセンブリは、アクチュエータの持ち上げ能力範囲を変更するための複数の追加的減速機に設けられる。当該遊星歯車減速機の物理的配置はワイヤローププーリ(の)ドラムに閉じ込められているような配置である。当該ケーブルガイドは、ドラムから巻き取り中または送り出し中のケーブル位置の制御を行い、巻き(張り)が適正になるように維持を行う。当該調整可能なケーブルリミットセンサは、ケーブルが巻き取られているときおよび送り出されているときにケーブルガイドの極端な軸方向移動に応答してトリガされる。当該ケーブルガイドは、ケーブルが巻き取られているときおよび送り出されているときにドラムの溝に係合し、ガイドを動かす横方向の力を与えるための複数のねじ山(凸部)を備える。当該溝はドラム上でのワイヤロープの位置決めを可能とするので、ドラム上のワイヤロープの正確な単層配置が可能になる。
【0008】
オペレータインタフェースのその他の実施例に関連して開示されるものには、ハンドルと、ピボット運動可能な(ある点を中心に回転できる)カップリングと、コイルセンサと、液晶ディスプレイと、近接非接触光学センサと、クイックディスコネクトアタッチメントがある。当該カップリングは、電気的接触およびエアチャンネルまたはコンジットを提供するのに適した平たいスリップリングを介してインタフェースをワイヤロープに取り付けるものであるが、インタフェースのロープに対する360度回転は可能である。当該コイルセンサは、可撓な線材によってコイルの中を通っているコアと結合している当該ハンドルの変位の垂直方向成分を検出する。当該液晶ディスプレイは、当該インタフェース上にあってオペレータに状態情報を表示する。当該近接非接触光学センサは、操作の間ハンドル上にオペレータの手が存在するかの感知を行う。バヨネットタイプまたはピンタイプの当該クイックディスコネクトアタッチメントはインタフェースの下部に取り付けるべき工具のためアタッチメントである。
【発明を実施するための形態】
【0009】
以下は各々の電気式リフトアクチュエータの様々な改良に関するもので、実施例として説明されている。しかし、様々な改良は、通常、他のタイプのアクチュエータまたは他の荷重ハンドリング装置にも使用または実施することができ、本明細書で開示されている電気モータまたはリフトシステムに特に限定されるものではない。図は測られることを想定しておらず、いくつかの形状に関しては明確さを向上させるために拡大して表わされている。
【0010】
図1を参照すると、本発明の実施例が概略構成として示されており、例示的な人間パワーアンプ110内の巻き取り装置または駆動プーリおよび付随する機械的アセンブリが示されている。デバイスの上部ではアクチュエータ112によって駆動される巻き取りプーリ111が天井部、壁部、またはオーバーヘッドクレーン、オーバーヘッドアームまたは同様の構造(図示せず)に直接取り付けられている。プーリ111に巻かれているのは、一端がプーリに取り付けられ、他端が荷重を接続するために自由になっているラインまたはケーブル113である。ワイヤロープとも称されるケーブル113はプーリが回転すると荷重125を持ち上げまたは下げることができる。ライン113はいかなるタイプのライン、ワイヤ、ケーブル、ベルト、ロープ、ワイヤ・ライン、コード、より糸、ストリング、チェーンまたはその他のプーリまたはドラムが巻き取ることができ、荷重を持ち上げる力を与えることのできるものでもよい。ライン113に取り付けてあるのはエンドイフェクタ114で、ヒューマンインタフェースサブシステム(例えばハンドルまたはペンダント116)および荷重インタフェースサブシステム117を含む。本実施例においてこれらは取り外し可能なJ型フックを含むが、一組の吸着カップまたは同様の荷重把持ができるものも含んでもよい。図示していないが、吸着カップの実施例には吸着カップに負圧を供給するための空気ホースも含まれる。
【0011】
1つの実施例において、アクチュエータ112は変速機を備えた電気モータであるが、別の実施例として変速機を持たない電気式駆動によるモータとすることもできる。さらに、アクチュエータ112は空気(圧)駆動、油圧駆動あるいはその他の方式で駆動できる動力を動力とすることができる。本実施例では、変速機は、例えばギア、プーリ等のような、ラインの張力を増加または減少させる機械的デバイスである。プーリ111はドラムまたはウインチのような、アクチュエータ112が与える回転的または角度的運動をライン113が上下する垂直方向の運動に変換する任意のメカニズムによって置き換えることができる。この実施例において、アクチュエータ112は持ち上げプーリに直接的に動力を与えるが、アクチュエータ112を異なる場所に設置し、プーリにチェーンおよびスプロケットの様な代替の伝達システムを経由して動力を伝達させることもできる。アクチュエータ112は信号ケーブル(図示せず)、ワイヤハーネスまたは同様の信号伝送手段でエンドイフェクタ114から信号を受信する電気的コントローラ150に応じて動作するのが好ましい。電気信号を伝送する様々な方法が存在し、伝送手段は無線伝送を含むその他の信号伝送手段(例えばRF、光学的伝送手段、その他)にしてもよい。本発明の1つの実施例においては、コイル状の制御用配線および/または空気路が特別に成形され、コードがその形状を保つことができる特別なコイルコード148(ロープ113を囲むように輪状に巻かれたもの)でもよい。
【0012】
オペレータコントローラに加えて1つまたは複数のセンサが使用され得、システムに機能性および/または安全性を与える。例えば、コントローラ150は、弛みセンサ160のようなセンサ(例えばスイッチ等)、ケーブルリミットセンサ170、ロードセル1170(例えば図10、図11の様なもの)またはオペレータ存在検知センサ1710(図17)からの入力を受信する。
【0013】
実施例においてコントローラ150は3つの主要コンポーネントを備える。
【0014】
1.入出力可能なアナログ回路、デジタル回路および/またはコンピュータおよび一般的な周辺機器を含む制御電気回路である。この制御回路構成の機能は、様々な入力から得られた情報を処理し、アクチュエータの制御(パワーアンプを経由)のための制御信号を生成することである。
【0015】
2.制御回路からの命令信号に応答してアクチュエータに電力を送るパワーアンプ(荷重による力を示すロードセル等)である。通常、このパワーアンプは電源からの電力を受け、アクチュエータへ適切な電力を伝送する。パワーアンプによってアクチュエータ112に供給される電気的力(電流および/または電圧)は、コンピュータおよび/または制御回路において生成された制御信号によって決定される。当然であるが、リフトに必要な条件に基づいて様々なモータドライバアンプ構成が用いられる。1つの実施例において、モータドライバの組は製品番号8V1016.50−2.のB&R Automation社製のACOPOSサーボドライブが好ましい。別の実施例ではさらにこのドライブとの結合において用いられる異なるモジュールを使ってもよい。それは制御を完全にするCPU(ACOPOS 8AC140または8AC141)、I/O モジュール(8AC130.60−1)および同様の構成のようなものである。
【0016】
3.起こりうる事象の順序に応じて、システムを起動および停止させるための電気機械的または半導体リレー、スイッチ、センサから構成される論理回路である。例えば、リレーはコントローラかエンドイフェクタのどちらかに設けられた2つの押しボタンシステムによって、全体の操作を開始および停止するために使用される。リレーは電力供給がなくなった場合またはオペレータがシステムから離れたときに摩擦ブレーキ(図示せず)を作動させる。通常、用途に応じて様々な基本設計概念および細部の設計が論理回路に対して可能である。1つの実施例において論理回路はGorbel.Inc社によって製造・販売されているG−forceリフトにおいて使用されているものに類似している。
【0017】
米国特許第6,622,990号において詳細に示されているように、ヒューマンインタフェースサブシステム114は人間の手によって握られるように設計されており、人間が与えた力、すなわち人間(オペレータ)からヒューマンインタフェースサブシステム114に与えられた力を測定するように設計されている。1つの実施例において、人間が与えた力はロードセル1170(例えば図10及び図11)または以下で詳細に述べる類似した出力生成センサによって検出される。荷重センサにおいて生成される信号出力レベルは、人間によってエンドイフェクタに与えられた荷重に応じたものであり、支持されている荷重に加算され、またはそこから減じられる。
【0018】
以下で記述する荷重インタフェイスサブシステム117は、荷重との接合部として設計された取り外し可能またはカスタマイズ可能な機構で、把握、締め付け、またはその他様々なカスタマイズされた荷重把持デバイスを含む。インタフェイスサブシステムの構成は、荷重の形状および持ち上げ操作に関わるその他の要因に依存する。その他の荷重インタフェースは、フック117以外に、例えばインタフェイスサブシステムに接続される吸引カップ、様々なフック、クランプ、把持部およびそれらに類するものでもよい。重い物体を持ち上げるため、荷重インタフェイスサブシステムは複合的な(複数の)荷重インタフェース(複合的(複数の)フック、クランプ、把持部、吸引カップ、および/またはそれらの組み合わせ)からなり得る。
【0019】
リフトシステムの構成要素を説明してきたが、ここから本発明の様々な特徴を説明する。1つの特徴はアクチュエータシステムの“ビルディングブロック構造”と呼ばれるものである。ビルディングブロック構造は図2から図6に概略的に示されており、そこで様々なビルディングブロック構造の特徴が示されている。ビルディングブロック構造において、リフトシステムの様々な構成要素(例えばアクチュエータ、ハンドル、ギア減速機等)は複数のモデルまたは複数のタイプのリフト(例えばEasyArm(登録商標)、G−Force(登録商標)等)において使用できるように構成されている。持ち上げ能力のような特性は注文毎に設定されるべきと考えられているので、当該デザインは解析され、どの構成要素が共有または共通に用いられ得るか、および注文ごとに選択されるべきものはどれか、が判定される。
【0020】
このような例の1つは図2から図4に示されている。例えば図2おいてはモータ210および付随する減速機212が用いられ、当該構成要素のどちらか一方または両方は、所定の持ち上げ能力の範囲を持つ様々なアクチュエータに亘って使用され得る。この例は図3および図4に示されている。低い能力のユニットにおいて、ドラムプーリインテグラルアダプタ216aはモータ/減速機アセンブリに取り付けられている。それ以外の減速装置は使用されていない。図3および図4を参照すると、ドラムプーリインテグラルアダプタ216aの代わりに図3では代替減速手段である減速機216bが取り付けてあり、図4では追加減速手段である減速機216cが取り付けられている。追加減速装置216bはモータ210が増加した荷重負荷の持ち上げを可能にするために設計/寸法決め(例えば図5の内部遊星歯車アセンブリ218)されている。図4を参照すると、減速機216cが取り付けられており、使用される追加減速機はモータ210に異なる荷重範囲の荷重を持ち上げることができるように設計/寸法決めされている。従って、ユニバーサルモータは複数のアクチュエータ荷重範囲に亘って使用でき、その場合加えられ/変更される主要コンポーネントは追加減速機である。
【0021】
今まで説明してきたように、図示された実施例は積み重なったビルディングブロック構造のギア減速機構を使用しており、減速アセンブリ216a、216bおよび216cは荷重保持能力が異なる。なぜなら内部遊星歯車218は異なるモデル間で様々に変更できるギア比を備えているからである。一番低い持ち上げ能力に対しては、単純なアダプタが追加的減速機の代わりに用いられている。最も重い持ち上げ能力に対しては第2のまたは積み重ねられた減速機が加えられ、第2減速機の構成はリフトアクチュエータに必要な能力に応じて選択される。異なるまたは代替的な減速機(および遊星歯車)アセンブリが使用されるとき、コントローラは同様に変更されるかまたは再プログラムされるので、モータ駆動特性は適切に調整され、アセンブリの変更された減速能力およびモータの回転の方向に対応できる。
【0022】
図2から図6に図示されているアクチュエータ駆動部の構成は、特定の用途のアクチュエータユニットの大量生産(個別の注文に対応できるような大量生産)を可能にし、さらに効果的な保守・点検や低い生産量におけるコストのかからない構成を容易にすると考えられる。図5および図6にも図示してあるが、様々な実施例はドラムプーリ111内部のギア減速構造も含む。遊星歯車減速機218はワイヤロープドラムプーリ111の内部にあり、減速機をドラムと直列に並べて設置する従来のシステムと対照的に、空間、重さおよびコストを節約する。また、クレーン梁のような外部構造から吊下げられているときのアクチュエータのバランスも向上させる。ドラム内部に減速機を設けることによってユニットはコンパクトとなり、ユニットの重さはドラム材料減少の故に(わずかに)減少している。ドラムを管材から従来方式で製造することによって、材料の固形ブロックを機械加工して製造するよりも減速機のコスト(価格)を減少させることができる。例えば、1つの実施例において、ドラムはアルミニウムの合金またはその代わりにナイロンまたはそれに類した適当な機械的性質をもった高分子化合物から製造してもよい。
【0023】
リフトシステムの分野の当業者には当然であるが、ここで開示している様々な実施例の重要な特徴は、リフトシステムの重量の減少である。リフトの持ち上げ能力の実質的な増加のためには、リフトの支持構造(例えばトラス、カンチレバーアーム、トロリー等)における増加した当該能力の影響を考慮するべきである。従って持ち上げ能力の増加を可能にする一方で、この能力向上を有効に利用するために持ち上げ装置自身の重量を減少させることも必要であろう。例えば、持ち上げ能力を25kg増やすならば、この改良されたリフトを使用するためには、支持構造が増加した能力を支えられることを保証する必要があるか、または構造体に支えられている全体的な重量を減少させる必要がある。後者は本明細書で開示される実施例の様々な特徴により達成される。アクチュエータ重量の減少によって、より多くの支持構造の能力を負荷重量のために使用することが可能になる。さらに、アクチュエータ重量の減少はリフトの移動(より少ないオペレータの労力(マニュアル)またはより小さいモータ(トロリー))を容易にする。
【0024】
次に図7Aから図7Cまでおよび図8から図10までの構成を参照すると、アクチュエータ112の実施例の別の構成部品が示されており、アクチュエータに支持されている荷重は圧縮型ロードセルを用いて直接的に検出される。アクチュエータ112はさらにアーム710または同様の構造およびスリーブ712を含み、それらは互いに動作可能なように接続され、ドラムプーリ111と接続されている。1つの実施例において、アーム710はスリーブに取り付けられ、それによって本明細書において開示している荷重検出および弛み検出機能を実行できる面が提供(形成)され、および弛み状態中の積極的な回転停止を可能とする。例えば図9において図示されているように、スリーブ712はさらに追加減速機およびドラムプーリ111を支持し、ドラムプーリ111にはワイヤロープまたはケーブル930が巻きつけられていて、ケーブル930の一端はドラムプーリ111に取り付けられている。
【0025】
1つの実施例において、アクチュエータ112は超高分子量ポリマー摩耗リング999(ワイヤロープ930が通っているアクチュエータ下部のドーナッツ状の開口部)を使用する。摩耗リングを使用することにより従来のアクチュエータと比較して高い耐久性を得ることができる。異なる実施例において、アクチュエータの別の構成として、支持ブラケット(例えばアーム710)がアクチュエータ駆動構成要素および/またはカバーおよびハウジングに接続されている図8に示すような様式を変更することが考えられる。例えば、図10に示されている構成は、わずかに異なったアームおよびそれに関連する支持構造をアクチュエータにおいて使用している。
【0026】
アクチュエータ112はさらにセンターキャスティング840を含み、センターキャスティング840内でドラムまたはアクチュエータ駆動アセンブリの追加的減速機はベアリング844により支持されている。しかし、アクチュエータにおける荷重(アクチュエータ駆動コンポーネントの回転)を検出するためのロードセルを使用するため、ドラムプーリ111、スリーブ712、コイルコードサポートおよびアーム710を含む駆動アセンブリは、センターキャスティングに対しての回転的運動が制限的であっても可能であることが必須であると思われる。図8に示されているように、アクチュエータ112は、センターキャスティング840に接続されている支持部材850をさらに含み、それによってアクチュエータはトロリーまたはアームの様な支持構造(図示せず)から吊下げられている。また、アクチュエータ112はアクチュエータの動作部品を覆うケースまたはハウジング860(破断図として図8に示している)も含む。図示されたアクチュエータに適したハウジングの1つの実施例は、例えば米国意匠特許出願第29/256,812号において示されている。
【0027】
カバーを成型加工で製造する以外に、アクチュエータ112の更なるコスト削減は安価なカバーの使用で可能と考えられる。例えば、加工済みのシート状の金属またはプラスチックおよび所定形状の素材から製造されたカバーまたはカバー構成要素は、結果として非常に大きいコスト削減をもたらす。さらに、現在のシート形成技術によれば図8および当該意匠特許出願において部分的に示されている類の複雑な形状の形成が可能である。形成された金属カバーを使用する1つの実施例において、ゲートまたは開口部は同じように維持されるが、カバーのそれ以外の部分は形を変え、異なる材料や成型技術を使用できるようにすることもできる。
【0028】
改良された駆動部の共通設計に加えて、駆動および制御電子機器、例えば、B&Rオートメーション社が製造した製品番号8V1016.50−2のACOPOSサーボドライブのようなものは、さらに向上した入/出力能力およびプラグアンドプレイ構成要素として特徴づけられた設計改良を可能にする。アクチュエータ、ハンドル等の様々な構成要素のプラグアンドプレイ特性は、リフトに取り付けられているハンドルの種類をリフトコントローラ(図示せず)が認識することを可能とし、プログラム化された操作または入出力(I/O)を調整することを可能とする。従って、検出された構成要素は適切にそのハンドルと共に動作する。プラグアンドプレイ特性はハンドルタイプまたはアクチュエータタイプがその他のタイプへ変更されるときに機械的および電気的変更を行う必要があるという従来のリフトシステムにみられた課題を解消し、それによって時間およびコストのかかる改良を回避し、現場での変更および改良を実現可能とした。
【0029】
改良されたアクチュエータ112に付随するコントローラによって可能とされたその他の特徴は遠隔診断機能である。遠隔診断の実施例では、コントローラは通信回路装置を備え、情報はアクチュエータコントローラとその他のコンピュータデバイス(例えばワークステーション、クレーンコントローラ等)との間でネットワーク接続(LAN/WAN/Internet)を介して交換される。本発明の実施例によると、遠隔診断機能は、アクチュエータの様なリフトデバイスの遠隔設定および遠隔トラブルシューティングを可能とする。
【0030】
例えば、デトロイトにいる顧客が特定のアクチュエータに問題を抱えた場合に、アクチュエータのコントローラに遠隔地からアクセス可能(信頼できるネットワークIPアドレスまたは類似の識別子によって)か、または少なくとも遠隔地にあるコントローラからのデータをイーサネット、モデムおよび/またはインターネットを介して受信が可能である。そのことにより、チェックおよび設定変更ができ、動作の問題を解決することができる。技術者が修理地に行くまたはアクチュエータをサービス部門(部署)に送り返すという従来的な作業なしには、リフトのアフターサービスを完遂し、動作の問題の解決を現在はすることができない。そのため、遠隔診断および遠隔保守・点検・保全はシステム保守および修理コストを大幅に減少させるだろう。また、以上のことはユニットのダウンタイムを大幅に減少させるであろう。コントローラは、CANbusやその他の良く知られたデジタル通信技術のような一般的な通信プロトコルを使用でき、ログ情報および実行記録の伝送を含む基本的な診断機能が少なくとも実行・保存可能である。
【0031】
上述の通り、アクチュエータ112の構成は、駆動アセンブリがセンターキャスティング840に対して回転できるようにされている。このような構成は、更に詳しく図10及び図11に示されている圧縮ロードセル1170の使用を容易にする。従来の荷重バランスリフトにおいて、ロードセルは一般的に、荷重が加えられるまたは取り付けられるコントロールペンダントまたはエンドイフェクタの内部またはそれに付随して設置されていた。しかし、このようなシステムはより複雑な荷重センサ(張力および圧力を検出するセンサ)の使用を必要とし、荷重をコントロールするための所定のタイミングで正確なアクチュエータコントローラへの信号の返送を必要とする。また、ペンダントに設置されたロードセルの脱落があっても妥当な安全性を提供するために、さらに複雑でコストのかかるインターロック型のロードセル構成も必要とされる。ドラムセンタキャスティング840に圧縮型ロードセル1170を取り付けることにより、アーム710に与えられる回転力を検出することが可能となる。この回転力はケーブル930の自由端に吊下げられている荷重から生まれる。ロードセルがコントロールシステムに隣接して、アクチュエータ筐体内に配置してあるので、伝送経路がより短くなり、かつコントローラ150が受信する信号の品質が向上する(図1)。
【0032】
ロードセルを荷重経路外に移動することは、リフトデバイスの安全性を向上させる。なぜなら、ロードセルが壊れても荷重は落下しないからである。それ故、図10および図11において示されている構成はリフトシステムにおいてロードセルをリンクさせることなく、駆動アセンブリに隣接した場所での荷重の検出を可能にする。駆動アセンブリ(例えばドラムプーリ111、減速ギアボックス212、アダプタ/追加的減速機(216a,bまたはc)およびモータ210)において、アセンブリの構成要素はロールベアリング844上の軸回りに回転する。作動面1174はアーム710に付随しており、アーム710はスリーブ712に取り付けられており、ギア減速機212の設置面にボルトで取付けられている。圧縮型のロードセル1170は巻き上げ機のセンターキャスティング840に強固に取り付けられており、作動面1174から加えられる力を検出できる場所に設けられる。オペレータが吊下げられた荷重に手動で力を加えるとき、駆動機構は矢印1178の方向に回転し、ロードセルに加えられる力を変化させる。当該荷重が重くなれば、ロードセルによって検出される圧力は大きくなり、逆もまた然りである。図11に示されているように、力センサは小さい付勢スプリング1150をロードセルシャフト1145の端部に備え、これによってロードセルから離れているケーブルおよび/またはペンダントのデッドウエイトをバランスし、このことは後述するように弛み検出においても重要である。代替実施例において、本発明はモータの電流をコントローラおよび付随するソフトウェアによって監視することにより、ケーブルまたはそれに吊下げられたペンダントに加えられる荷重を導出することを意図している。
【0033】
リフトアクチュエータのその他の改良にはロードセル信号の調整が含まれる。ロードセル信号をこの実施例に対して有用にするための処理に加えて、ロードセル信号に対して単体の調整回路が使用され得ることがさらに本発明に含まれる。その場合、3個までまたは4個以上のロードセルが使用され得(例えば3つの異なる荷重範囲)、共通または共有の調整回路が使われ得る。当該共通な信号調整方法に代わるものは、別個の(複数の)回路を設け、異なったロードセルを制御し、ケーブルに吊下げられた、あるいは加えられた荷重に応じて生成された出力信号を処理するものである。
【0034】
次に図12A、図12B、図13Aから図13Cおよび図14を参照する。図12Aはコントロールペンダント116においてのオペレータの意図を判定するための改良された電子機械的機構である。別の例として、図12Bに示してあるようなペンダントが本発明の装置をコントロールするために使われ得る。このようなペンダントの特徴・構造は、米国特許出願公開第2005/07872A1号(出願日2005年3月21日、出願人 M.Taylor他、米国特許出願番号第11/085764号)において開示されている。前述の両方のデバイスは様々な信号発生デバイス(視覚的、聴覚的、振動的)を使用し得、現在の操作状況またはオペレータのためのその他の情報を表示するための、液晶または類似のディスプレイ装置3610を備え得る。
【0035】
従来のLVDT(Linear Variable Displacement transducer)と比較して、図12A(図13Aから図13Cも参照)に示されている実施例において検出機構はコイル装置1310を使用する。この実施例において、当該コイルは金属ロッドまたは同様の部品からなるコアを感知し、オペレータの意図(持ち上げるまたは下ろす)を感知することに用いられる。図で示されている実施例になされる他の変形・改良は、ハンドルのスライド部分であるオペレータグリップ1716に当該コアを取り付けるための可撓な線材1320を使用することである。カスタムコイル装置を使用すると、市場入手可能なLVDTに比べて安価になる。さらに、コアをハンドルに接続する可撓な線材(例えばナイロンまたは同様のプラスチックまたは可撓な材料)を使用すると、荷重下でハンドルに限界を超えたトルクがかかる、あるいは限界を超えた回転が起きることによるコアのせん断破壊が防止され、完全な位置合わせをしていない場合のシステム障害が防止される。図13Aおよび図13Bに各々示されている上向きまたは下向きのオペレータ入力を判定するためには、LVDTまたは磁気センシングデバイスの使用も可能である。図13Aおよび図13Bに示されている実施例は、コイルに対するハンドルの各々の動き(下の長い矢印)を示している。
【0036】
ハンドルを介したオペレータ入力を感知するための他の装置は、例えば米国特許第6,386,513号(出願人Kazerooni、発明の名称「HUMAN POWER AMPLIFIER FOR LIFTING LOAD WITH SLACK PREVENTION APPARATUS」、公開日2002年5月14日)およびPCT国際公開公報第WO2005092954号(発明の名称「ELECTRONIC LIFT INTERFACE USING LINER VARIABLE DIFFERENTIAL TRANSDUCERS」公開日2005年10月16日)に記載されている。1つの実施例において、コントロールペンダントは、例えば出願中の米国意匠特許出願第29/256,811号において図示されているものに類似のものであり得る。
【0037】
改良されたコントロールペンダントの他の実施例は、図14に示されている。ここでスリップリングは、コイルセンサ1320やパワースイッチ1610の出力、または電気コネクタ1624に存在する当該出力に関連する電気信号の、アクチュエータ112への正確性と信頼性のある伝送を、コネクタ1628に接続されたコントロールコイルケーブルを通して可能とするように構成されている。この構成は平たいスリップリングアセンブリ1620をコントロールハンドルに用い、ワイヤロープとコントロールコイルコードケーブルに無関係な360度の連続的な回転を可能とする。カスタムスリップリングは、回転するハンドルからコントロールコイルコードケーブルへ電気信号を通す。カスタムスリップリングアセンブリは、特に空気(圧縮空気および/または減圧空気)またはその他の加圧された流体がインレット1640から入って、当該カスタムスリップリングアセンブリの中央を通過することが可能なように構成されている。このことによって、オペレータはエンド工具(エンドイフェクタ)へエアパワー(空気力)を送り込み、当該エンドイフェクタを連続的な360度回転させることが可能である。
【0038】
スリップリングコンタクトは公知である。しかし、無制限な回転を容易にする統合された電気的および気体的コンジットの構成は、従来のリフト技術において使用されておらず、本改良されたペンダント構成の特徴である。エアコンジットは加圧された流体(例えば圧縮空気、減圧空気、油圧)をペンダントに付随する工具に移送することが可能であることが好ましい。改良された構成はペンダントの中の許容できる「ヘッドルーム」を適切なコストでさらに調整または減少させる。
【0039】
図13Aから図13Cを参照すると、ペンダント構成のその他の実施例が示されている。この場合、オペレータの存在(ハンドルの上の手)を誘電型、または好ましくは反射型光電子センサ1710を使用して感知する。1つの実施例において、センサ1710はチューブ状(筒状)の光電子センサ(金属、12mm、PNP)であり、オペレータの手が存在することを示す反射光を検出したときセンサ上の表示灯が切り替わる。様々な別なタイプのデッドマンスイッチが知られているが、それらの多くは堅いグリップまたはオペレータグリップ1716の握る部分が長いことが必要である。このような構成はオペレータを疲労させ、かつ混乱させてしまう。図13Aから図13Cまでに示されている構成は、巻き上げ機のオペレータのコントロールハンドルに接している手を検出する手段としての光電子センサである。これによって、ユーザ側の判断は必要なくなり、ユーザがユニットのオンオフの手段としてスイッチを使用すること避けることができる。手が接しているとき、当該センサはコントローラに信号を伝送するので、巻き上げ機を上方および下方に操作することができる。オペレータの手を検知するためのその他のセンサまたはスイッチは、公知の構成に類似した機械式のローラスイッチ、タッチセンサ、誘電型光学センサおよび膜センサを含む。上述したことで理解できるように、ペンダントボディ内でのセンサの設置場所は破損または意図に反する動作を避ける場所が好ましいが、ペンダントハンドルは隙間・開口部・切欠1730(これを通してオペレータの手の存在を検知できる)を備えなくてはならない。
【0040】
アクチュエータおよびコントロールペンダントの様々な使用において、現場では荷重インタフェースを交換または変更することが必要な場合もある。例えば、フックの代わりに、スレッドコネクタまたはそれに類したものを利用して荷重を持ち上げる必要があることもある。図15A及び図15Bを参照すると、そこに示されている構成はペンダントまたはエンドイフェクタ116の下にあるクイックディスコネクト(取り外しが簡単な)アダプタを含んでおり、そこにおいてオペレータはカラー1810を上にスライドさせることによってロックピン1820を内方に移動させ、工具取り付け軸1830を解放することによってエンドイフェクタを迅速に変更・交換することができる。その他の工具は、取り付け軸を取り付け穴にスライド係合させることによって、迅速および簡単に取り付けることができる。取り付け軸がスライドするとロックピンは内方に移動し、スライドが完了するとロックピンはシャンクにある溝1834を拘束し安全にロックされる。エンドイフェクタ変更・交換にはどんな工具も必要としない。
【0041】
公知の溝連結技術が用いられ得ることや、工具を取り外すためにオペレータにピン1910(図16)の物理的な取り外しを必要とするその他の実施例が、本明細書に示されている様々な実施例の範囲に含まれていることを当業者は当然理解するだろう。
【0042】
図17から図21を参照すると、改良されたケーブル弛み検出能力を備える本発明の実施例の特徴が示されている。改良された荷重検出に関して上記説明において示唆されているアクチュエータの実施例は、特に図17から図21に示されており、それはケーブルの弛みをドラム、ギア減速機およびモータ(駆動アセンブリ)の回転(たとえ逆方向回転でも)を用いて検出するものである。この構成において主駆動アセンブリ(ドラムプーリ111、ギアボックス(図示せず)およびモータ210)はロールベアリング844の軸上で回転する。作動板またはアーム710はスリーブに組みつけられ、スリーブは主ギアボックスの取り付け面にボルト付されていて、これらは駆動アセンブリとともに回転する。オペレータがワイヤロープ930に接続されているコントロールハンドルまたはその他の適切な工具以外のすべての重量を取り除いたときに弛みが誘発される。弛みが生じたとき、圧縮バネ1150(図11)によって補助されて、当該駆動アセンブリは反時計回り(矢印2020)に回転する。顧客による使用工具の変更を容易にするために、バネ力の調整のための機構は必要である。圧縮バネ1150はロードセル1170と作動板の面1174との間に設けられ、ロードセルに設置された荷重ピンまたはシャフトの同軸上にある。駆動アセンブリが無荷重または弛みのある状況で回転するとき、巻き取り機の主支持フレームに設けられたマイクロスイッチ2030は、当該作動板(図24)の存在を感知する。この感知はマイクロスイッチ2030が符号2034において作動板(図24)に接することで行われる。マイクロスイッチが作動すると、マイクロスイッチはコントローラ(図示せず)に信号を伝送し、その信号によってソフトウェアは巻き上げ機に上方に巻き上げることのみを可能にさせる。ユーザの安全のために、一度弛みが検知されたら、コントローラは巻き上げ機に下方にさらにワイヤロープを送り出させない。
【0043】
上述のことから理解できるように、荷重検出または弛み検出のための回転駆動アセンブリの使用は、荷重検出デバイスに任意のトルク荷重の監視、およびそれによるすべての荷重の検出を可能とし、ワイヤロープおよびコイルコード/エアホース両方が監視される。換言すれば、荷重センサには圧縮荷重がかかり、それが荷重の重さの直接の結果である。荷重が持ち上げられまたは下ろされるとき、コイルコード、エアホース、およびワイヤロープによる荷重保持の(依存)割合は変化するが、合計した荷重は変わらない。ワイヤロープおよびコイルコードアセンブリ全体は回転駆動アセンブリに支持されているので、ロードセルはそれらの全体の重さを常に感知しており、荷重の高さ位置の変化は荷重検出やフロートモード操作に影響を及ぼさない。内在的で有害な影響(例えばフロートモードにおけるバネ力およびコイルコードの重さの影響)は設置時の調整によって打ち消される。
【0044】
その他の実施例においては弛み状態を判定するためにモータの電流を監視するソフトウェアを利用する弛み検出を行ってもよい。しかし、このような方法は信頼できないという不安が残る可能性がある。機械的な接触スイッチ(ローラスイッチまたはそれに類したもの)に代えて、非接触近接センサ2040が板710の回転の検出に使われ得る。このような実施例は例えば図20および図21において示されており、弛み状態を判定するために板710の回転を検出することにセンサ2040が採用されている。
【0045】
改良されたアクチュエータ112の様々なその他の特徴を以下で説明する。この特徴はドラムプーリおよびワイヤロープ(ケーブル)ガイド装置を含む。図22から図29を参照すると、改良された構成はツーピースのアセンブリ2610(2610a、2610b等)を使用している。そのアセンブリはワイヤロープまたはその他の持ち上げ媒体の周りにクランプ固定または組付けられていて、ドラムカバー998(図25)によるレールの上を前後にスライドする。アセンブリ2610のスライド移動はアセンブリの半分の部分にある凸部2620によって誘導され、符号2610aはワイヤロープドラムプーリ111の外溝2622内を動く。
【0046】
ロープ930の近傍に取り付けられているアセンブリ2610はスライドゲートまたは開口部を形成し(有し)、ワイヤロープ930はそこを通って、図24に示されているようにドラムから離れる(ほどかれていく)。このようなデバイスは、ケーブルおよびドラムを保護する役割に加えて、ドラム溝の側部の摩耗を防止し、ワイヤロープがドラムプーリにきつく(しっかりと)拘束されるように保ち、望まれない弛みの発生を防止する。換言すれば、ワイヤロープの横向きの力はゲートによって取り去られ、ケーブルはドラム表面を摩耗させない。なぜなら、(ゲート)入口において、ドラム溝に対するアラインメントは、すべての場合にほぼ完璧だからである。ゲート2610aの凸部の大きな荷重を受ける部分は大きな横向きの力を生み、それら力はドラムの多くの溝に分散される。なぜなら、横向きの力はワイヤロープがほぼ外にでて、ドラムの溝とゲートとのかみ合わせがゲートの凸部の最大数のときにのみ起こり得るからである。ゲートの当該半分をドラムに固定すると、ワイヤロープを交換するときにワイヤやドラムの位置関係が維持できる。
【0047】
本実施例の他の特徴は図24から図29に具体的に示されていて、スライドゲート2610はケーブル送り出しの上限および下限の表示器として使うことができる。図25から図28において破線矢印で示されているように、ワイヤロープの巻き取りおよび送り出し時においてゲートはドラムプーリの回転によって前後にスライドする。図25および図26に示されているリミットスイッチ2510を追加する(設ける)と、例えばゲート2610の動きをロッド2520または同様の部材を介して、送り出し移動のリミットの確認に使用することが可能になる。以下で説明されるように、上記構成はシステム変更やワイヤロープの交換等の影響を受けないリミットスイッチの設定を可能にする。実際、ワイヤロープの最大送り出しに対するリミットスイッチは、新しいロープを取り付けるためによける必要があるが、ワイヤロープ交換のために取り外す必要があるのは、ワイヤロープの支持されている端近傍のゲート側面2610bのみである。ワイヤロープドラムプーリを前後に動かすためには、従来のボールスクリュ駆動機構が使われるか、もしくはドラムプーリの1つの溝を介してアイドル滑車を駆動させる機構が使われるような現在多くのGorbel社のアクチュエータで使われているものが用いられるだろう。
【0048】
図25および図26を特に参照すると、上で示したようなマイクロスイッチ2510を用いたリミット検知システムが示されている。図示された実施例は、ロッド2520で構成されている。ロッド2520は溝の切られたゲート(ゲート2610a)の動きによって前後に動く。ロッド上に設けられている2つの調整可能なシリンダ2530は所望の位置に移動し、そこに固定することが可能である(例えば固定ナットまたはそれに類したものによって)。ゲートが上限リミットおよび下限リミットの位置にあるときに、これらのシリンダはマイクロスイッチ2510に接する。ワイヤロープガイドまたはゲート機構が前後にスライドし、シリンダがセンサ2510に検知されると、信号はコントローラに送られ、ユニットの上限または下限の移動リミットのどちらかに到達したと判断される。移動リミットが検知されると、当該ソフトウェアは巻き上げ機に検知された目標物と逆方向の動作のみを可能とする(例えば上限が検知されたならば、巻き上げ機は下方にのみ動作する)。当該リミットはシリンダを動かすことによって調節できる。
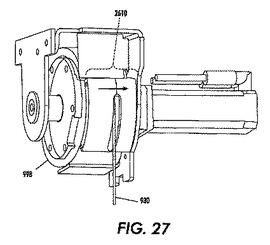
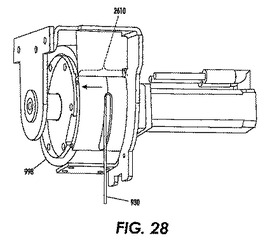
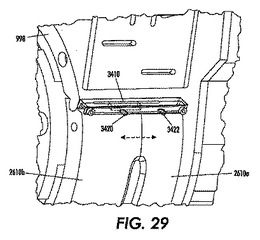
【0049】
マイクロスイッチ機構は、その単純さという長所の故に好ましいと考えられる。しかし、センサを起動させるために必要な接触による力が不要で、構成要素の摩耗が防止できる、磁気非接触型センサの様な他の検出システムを使用してもよい。例えば、図27から図29に示されているように、磁気センサ3410は固定されたワイヤロープドラムカバー998に固定され得る。当該センサは、ワイヤロープガイド機構2610に設けられた2つの磁気目標物3420および3422に沿って移動可能に、ドラムプーリに接続されている。当該センサ目標物3420、3422は、一方がN極が向けられた磁石であり、他方はS極が向けられた磁石であり、前述したのと同様の移動リミット信号の提供に適している。その他の置換可能な移動リミットセンサとしては光学的またはその他の非接触型のセンサでもよいし、従来の機械的なセンサおよびスイッチでもよい。
【0050】
本明細書で開示されている様々な特徴や機能は、プログラムコードによるコントロールの下で作動するのに適したコントローラまたは同様の処理システムを使用して実行されるのが好ましい。1つの実施例は広範囲な特徴および機能のために予めロードされた性能を備えたコントローラ150(図1)を使用しており、1つまたは複数の特徴および機能はその後与えるコントローラへの命令または信号によってのみ実行可能になる。このように、アクチュエータ112(コントローラ150を含む)の汎用的な性質はさらに拡張できる。この全てのソフトウェア機能が予めロードされ、顧客が要求し、支払いをしたもののみが利用できる仕組みは、本発明が意図しているようなコンポーネントの互換性を高めると考えられる。このようなプロセスは、現場においてアクチュエータが取り付けられた後の機能の加増を可能にし、例えば顧客の要望または用途が変わった時にそのアクチュエータは追加的に特徴または機能を得ることができる。プラグアンドプレイコンポーネントが後でアクチュエータに取り付けられた場合において、そのアクチュエータは前述されたコンポーネントを認識するだけではなく、プログラム制御を変更し、新しく導入されたコンポーネントの使用を容易にすることも可能である。これらの改良は、特別なソフトウェアの変更および継続的なサポートの必要性を減らすもしくは無くしつつ、顧客の要求に応じたアクチュエータの迅速なカスタマイズを可能にする。
【0051】
図12Aに戻ると、オペレータコントロールペンダントすなわちエンドイフェクタ116のさらなる改良が示されている。図示した実施例において、ペンダント116には、簡単に利用できる情報をユーザへ示すことができる通信手段としての液晶ディスプレイ(以下LCDという)3610または同様の表示装置が取り付けられている。LCDに表示される情報は、システムの状態(すなわちシステムが使用できる状態か否か)等の基本的情報、荷重の様な高度なまたは追加的な情報、システム使用法および保守・点検情報(終了したサイクル数およびシステム保守・点検表示)や、プログラムモードにおいては、どの特徴が現在プログラムされているか(例えば仮想限界)のような高度なアドバイスおよびフィードバックが含まれる。
【0052】
LCDを使用することによって、別の情報をインストーラ(ユーザおよび保守スタッフ)に提供することができる。また、LCDに代えて従来的な発光ダイオード(以下LEDという)およびその他のものがアクチュエータの状態情報をオペレータに伝えるために使われ得る。
【0053】
さらに他の実施例において、例えば図25に示しているように、ワイヤロープは常にドラムプーリ111と、ドラムカバー998と、スライドゲート2610との間でしっかりと束縛されている。従って、アクチュエータのどこにも、ワイヤロープにおいても弛んだ部分を生じさせるような空間・隙間は存在しない。従って、支持端の滑落を抑制している限り、ワイヤロープに加わる圧力荷重もアクチュエータ112の弛みの生成または弛みの蓄積を生じさせない。実際には、プーリからワイヤロープが送り出され、当該アクチュエータまたはドラムハウジングから出る手前において、アクチュエータの内部で当該ゲートから出る手前でワイヤロープのごく一部が自由となっている可能性が高い。さらに径の大きいワイヤロープ(例えば直径0.25インチ(0.635センチ)のワイヤロープが良い。細い直径のロープより軸方向強さがあるからである。)は短い距離で非拘束になっているロープにおける輪(弛み)生成の可能性を減少させる。当業者はロープの直径がアクチュエータの荷重限界量の関数であり、0.025インチ(0.0635センチ)よりも小さくも大きくもなり得ることを理解するだろう。
【0054】
追加機能が電流制御において提供される場合、システムは起動中に1つまたは複数のハードウェア認識プロセスを実行し、得られた情報を特定の機能に対して比較する。このような情報を使用することで、システムは動作不能なサブシステム、または認識できないサブシステム、例えばハンドルが認識できないことまたはオペレータの存在検知が動作不能であることの様な問題を発見した場合に表示できる警告メッセージを生成する。
【0055】
ここで述べられた様々な実施例を対象とする共通設計において、本発明はソースコードプログラムの毎回の変更ではなく、柔軟な構成のセットアップのためのリアルタイムI/O(入出力)ポートを使用する。このようなシステムはユーザにコントローラ内のプログラムされた機能へのアクセスを可能とし、さらに迅速に特定の用途のユニットのI/Oを構築できる。アプリケーション設定の容易さおよび柔軟性のさらなる単純化を提供するソフトウェアインタフェースを設けても良い。
【0056】
開示してきた様々な特性およびその他の特徴、機能、またはそれらの代わりになるものは、多くのその他のシステムまたはアプリケーションに適宜に組み込まれると考えられる。また、様々な今後当業者によって行われるであろう現時点では予期されない代替、変形、または改良は特許請求の範囲に包含される。
【図面の簡単な説明】
【0057】
【図1】図1は本発明の実施例の概略図である。
【図2】図2は開示された実施例の様々な共通の設計特徴に従ったアクチュエータ駆動アセンブリの代替実施例(例えば異なった荷重支持能力)の図である。
【図3】図3は開示された実施例の様々な共通の設計特徴に従ったアクチュエータ駆動アセンブリの代替実施例(例えば異なった荷重支持能力)の図である。
【図4】図4は開示された実施例の様々な共通の設計特徴に従ったアクチュエータ駆動アセンブリの代替実施例(例えば異なった荷重支持能力)の図である。
【図5】図5は異なった荷重支持能力を有する代替実施例を示した遊星歯車アセンブリの典型例の図である。
【図6】図6は異なった荷重支持能力を有する代替実施例を示した遊星歯車アセンブリの典型例の図である。
【図7A】図7Aは開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図7B】図7Bは開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図7C】図7Cは開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図8】図8は開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図9】図9は開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図10】図10は開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図11】図11は開示された実施例の特徴として使用される改良された荷重検出システムの図であり、この構成はロードセルを使用して吊下げられた構造に対する駆動アセンブリの回転によって加えられた荷重を検知する。
【図12A】図12Aは開示された発明に従って使用されているオペレータインタフェースデバイスの代替実施例の図である。
【図12B】図12Bは開示された発明に従って使用されているオペレータインタフェースデバイスの代替実施例の図である。
【図13A】図13Aは図12Aに示されているオペレータインタフェースデバイスの構成部品と動作例の図である。
【図13B】図13Bは図12Aに示されているオペレータインタフェースデバイスの構成部品と動作例の図である。
【図13C】図13Cは図12Aに示されているオペレータインタフェースデバイスの構成部品と動作例の図である。
【図14】図14は図12Aのオペレータインタフェースデバイスへの電気信号および気体(流体)の伝送に適したスリップリングアセンブリをの図である。
【図15A】図15Aは図12Aおよび図12Bのオペレータインタフェースデバイスの代替実施例の詳細図である。
【図15B】図15Bは図12Aおよび図12Bのオペレータインタフェースデバイスの代替実施例の詳細図である。
【図16】図16は図12Aと図12Bのオペレータインタフェースデバイスの代替実施例の詳細図である。
【図17】図17は本発明の特徴に従った潜在するワイヤロープの弛み状態を検出をする本発明の実施例の詳細図である。
【図18】図18は本発明の特徴に従った潜在するワイヤロープの弛み状態を検出をする本発明の実施例の詳細図である。
【図19】図19は本発明の特徴に従った潜在するワイヤロープの弛み状態を検出をする本発明の実施例の詳細図である。
【図20】図20は開示された発明において使用される他の弛み検出の実施例を示した図である。
【図21】図21は開示された発明において使用される他の弛み検出の実施例を示した図である。
【図22】図22は本発明の特徴に従った弛み防止を含む改良されたケーブル管理およびドラムカバーの特徴を示す詳細な図である。
【図23】図23は本発明の特徴に従った弛み防止を含む改良されたケーブル管理およびドラムカバーの特徴を示す詳細な図である。
【図24】図24は本発明の特徴に従った弛み防止を含む改良されたケーブル管理およびドラムカバーの特徴を示す詳細な図である。
【図25】図25は実施例の図であって、図22及び図23のケーブルゲートコンポーネントがケーブル移動リミットの検知に使用されている。
【図26】図26は実施例の図であって、図22及び図23のケーブルゲートコンポーネントがケーブル移動リミットの検知に使用されている。
【図27】図27は図22および図23のゲートを使用したケーブルの移動リミット検知の代替実施例の図である。
【図28】図28は図22および図23のゲートを使用したケーブルの移動リミット検知の代替実施例の図である。
【図29】図29は図22および図23のゲートを使用したケーブルの移動リミット検知の代替実施例の図である。
【特許請求の範囲】
【請求項1】
コントローラと、アクチュエータと、荷重インタフェースと、を備えたリフトシステムであって、
前記アクチュエータは、前記コントローラに応答し、ケーブルを取り付けたプーリを備え、前記ケーブルは自由端部において荷重を支持するために前記プーリに1層にまかれ、前記プーリはモータおよび付随する変速機によって駆動され、前記モータは少なくとも2つの荷重範囲での使用に適し、前記変速機はアクチュエータの荷重持ち上げ能力を決定するビルディングブロック構造のギア減速装置構造を備え、
前記荷重インタフェースは、前記ケーブルの前記端部に操作可能に接続されていて、ユーザコントローラを含み、前記コントローラへ伝送される信号を生成し、前記信号に応じて前記コントローラが前記アクチュエータに吊下げられた荷重を持ち上げたり下したりする動作を前記アクチュエータにさせることを特徴とするリフトシステム。
【請求項2】
請求項1に記載のリフトシステムであって、前記変速機のギア減速機として使用される遊星歯車減速機をさらに備えることを特徴とするリフトシステム。
【請求項3】
請求項1に記載のリフトシステムであって、圧縮式荷重センサをさらに備え、前記センサは前記アクチュエータと動作可能に接続され、前記センサはケーブルにかかる荷重に応じて前記アクチュエータの要素からかかる圧縮荷重を検知することを特徴とするリフトシステム。
【請求項4】
請求項3に記載のリフトシステムであって、前記アクチュエータの要素がアームをからなり、前記アームが前記プーリ、モータおよび変速機に付随するアームであって、前記アームが荷重に応じて回転方向に移動することを特徴とするリフトシステム。
【請求項5】
請求項1に記載のリフトシステムであって、前記コントローラに接続されている通信回路をさらに備え、前記通信回路は前記コントローラに遠隔コンピュータとの通信を可能とすることを特徴とするリフトシステム。
【請求項6】
請求項5に記載のリフトシステムあって、前記遠隔コンピュータとの前記通信は遠隔診断情報の伝送を含むことを特徴とするリフトシステム。
【請求項7】
請求項1に記載のリフトシステムであって、前記アクチュエータがスライドゲートをさらに備え、前記ケーブルの自由端が前記プーリから離れる際に前記スライドゲートを通ることを特徴とするリフトシステム。
【請求項8】
請求項7に記載のリフトシステムであって、前記スライドゲートが前記プーリと動作可能に付随していて、前記プーリが回転し前記ケーブルが巻き取られまたは送り出されるときの整合が維持されることを特徴とするリフトシステム。
【請求項9】
請求項8記載のリフトシステムであって、前記ゲートが前記プーリの回転に応じて前記プーリを前記プーリの長手方向に横切るように移動し、前記ゲートの位置を検知して前記プーリからのケーブルの送り量を判定することに適した少なくとも1つの移動センサをさらに備えるリフトシステム。
【請求項10】
請求項9に記載のリフトシステムであって、リフトシステムが移動リミットに至ったときに前記少なくとも1つの移動センサが信号を生成することを特徴とするリフトシステム。
【請求項11】
コントローラと、アクチュエータと、荷重インタフェースと、ロードセルと、を備えたリフトシステムであって、
前記アクチュエータは、前記コントローラに応答し、前記アクチュエータはケーブルを取り付けたプーリを備え、前記ケーブルの自由端部において荷重を支持し、前記プーリはモータおよび付随する変速機によって駆動され、
前記荷重インタフェースは、前記ケーブルの前記端部に操作可能に接続されていて、ユーザコントロール含み、前記コントローラへ伝送される信号を生成し、前記コントローラが前記信号に応じて前記アクチュエータに吊下げられた荷重を持ち上げたり下したりする動作を前記アクチュエータにさせ、
前記ロードセルは、ケーブルにかかる荷重に応答して圧縮力のみを検出するのに適し、前記コントローラに伝送される荷重信号を生成し、前記コントローラが前記アクチュエータに前記荷重信号に応じた動作をさせることを特徴とするリフトシステム。
【請求項12】
コントローラと、アクチュエータと、荷重インタフェースと、ロードセルと、を備えたリフトシステムであって、
前記アクチュエータは、前記コントローラに応答し、前記アクチュエータはケーブルを取り付けたプーリを備え、前記ケーブルの自由端において荷重を支持し、前記プーリはモータおよび付随する変速機によって駆動され、
前記荷重インタフェースは、前記ケーブルの前記端部に操作可能に接続されていて、ユーザコントローラを含み、前記コントローラへ伝送される信号を生成し、前記信号に応じて前記コントローラが前記アクチュエータに吊下げられた荷重を持ち上げたり下したりする動作を前記アクチュエータにさせ、少なくとも1つのユーザコントローラがコアの相対的な動きの検知のためのコイルを使用して信号を生成し、前記コアはスライドするハンドルに可撓な部品を用いて接続されており、
前記ロードセルは圧縮力のみを検出するのに適し、前記コントローラに伝送される荷重信号を生成し、前記コントローラが前記アクチュエータに前記荷重信号に応じた動作をさせることを特徴とするリフトシステム。
【請求項13】
請求項12に記載のリフトシステムであって、電気信号を伝送する回転可能なスリップリングアセンブリと、前記アセンブリを通過する圧縮流体とをさらに備えることを特徴とするリフトシステム。
【請求項14】
請求項12に記載のリフトシステムであって、前記ハンドル上のオペレータの手の存在を検知するのに適した反射式光電センサをさらに備えることを特徴とするリフトシステム。
【請求項15】
請求項12に記載のリフトシステムであって、前記荷重インタフェースは液晶ディスプレイを備え、前記液晶ディスプレイは前記コントローラから伝送された情報を表示することを特徴とするリフトシステム。
【請求項16】
コントローラと、アクチュエータと、荷重インタフェースと、を備えたリフトシステムであって、
前記アクチュエータは前記コントローラに応答し、前記アクチュエータはケーブルを取り付けたプーリを備え、前記ケーブルの自由端部において荷重を支持し、前記プーリはモータおよび付随する変速機によって駆動され、前記アクチュエータは動作可能に前記プーリに設けられたスライドするガイドをさらに備え、前記スライドするガイドは前記プーリが回転し前記ケーブルが巻き取られるときまたは送り出されるときの整合を維持し、
前記荷重インタフェースは、前記ケーブルの前記端部に操作可能に接続されていて、ユーザコントローラを含み、前記コントローラへ伝送される信号を生成し、前記コントローラが前記信号に応じて前記アクチュエータに吊下げられた荷重を持ち上げたり下したりする動作を前記アクチュエータにさせることを特徴とするリフトシステム。
【請求項17】
請求項16に記載のリフトシステムであって、前記ガイドはプーリの回転に応じて前記プーリを前記プーリの長手方向に横切るように移動し、前記ガイドの位置を検知することに適した少なくとも1つの移動センサ前をさらに備え、前記プーリから送り出されたケーブルの量を示すことを特徴とするリフトシステム。
【請求項18】
請求項17に記載のリフトシステムであって、前記リフトシステムが移動リミットに達したときに前記少なくとも1つの移動センサが信号を生成することを特徴とするリフトシステム。
【請求項19】
コントローラと、電気モータと、オペレータインタフェースと、フレームと、荷重センサと、弛みセンサと、ユニバーサルなモータおよび減速機アセンブリと、遊星歯車減速装置と、ケーブルガイドと、ケーブルリミットセンサと、を備えたリフトアクチュエータであって、
前記電気モータはアクチュエータを駆動させるためのものであって、コントローラからの制御信号に応じて作動し、ワイヤロープが巻かれているドラムを駆動し、
前記オペレータインタフェースは、前記ワイヤロープの自由端の近傍に設けられた取り外し可能な持ち上げ具を備え、オペレータから前記コントローラへの信号を与えてアクチュエータの動作を制御し、
前記フレームは、前記モータ、減速装置およびドラムを備えた駆動アセンブリ全体を回転可能に支持するためのものであって、
前記荷重センサは、前記フレームに設けられ、前記ワイヤロープの自由端に荷重がかかったときに、駆動アセンブリ全体の回転による荷重を検出し、
前記弛みセンサは、前記駆動アセンブリ全体の方位角または回転角を検出し、弛み状態の存在を前記弛みセンサからの信号に応じて判定するためのものであり、
前記ユニバーサルモータ減速アセンブリは、前記アクチュエータの能力範囲を変更するための複数の追加的減速機の一に設けられ、
前記遊星歯車減速機は、前記減速機の遊星歯車構成が前記ローププーリドラムにほぼ収容されており、
前記ケーブルガイドは、前記ドラムに巻き取られるまたは送り出されるときの前記ケーブルの位置を制御し、
前記ケーブルリミットセンサは、前記ケーブルが巻き取られるときまたは送り出されるときの前記ケーブルガイドの横方向移動に応じてトリガされ、
前記ケーブルガイドは、前記ドラム上の溝とかみ合う複数のスレッドを備えて、前記ケーブルが巻き取られるときまたは送りだされるときに前記ガイドを動かす横方向の力を与えることを特徴とするリフトアクチュエータ。
【請求項20】
ハンドルと、ピボット運動可能なカップリングと、スリップリングと、コイルセンサと、液晶ディスプレイと、非接触型の近接センサと、を備える請求項19に記載のリフトアクチュエータであって、
前記カップリングは、前記ロープに前記インタフェースを取り付けるためのものであるが、前記ロープに対しての360度回転を可能とするカップリングであり、
前記スリップリングは、電気的接触およびエアチャンネルまたはコンジットを提供するのに適した平たいスリップリングであり、
前記コイルセンサは、前記ハンドルに与えられた変位の垂直方向成分を検出するためのもので、前記ハンドルは前記コイルの中を通っているコアと可撓な線材によって結合されており、
前記液晶ディスプレイは、オペレータに状態情報を表示するために前記インタフェース上に設けられ、
前記近接非接触センサは、オペレータの手が操縦中に前記ハンドルの上に存在することを検知することを特徴とするリフトアクチュエータ。
【請求項1】
コントローラと、アクチュエータと、荷重インタフェースと、を備えたリフトシステムであって、
前記アクチュエータは、前記コントローラに応答し、ケーブルを取り付けたプーリを備え、前記ケーブルは自由端部において荷重を支持するために前記プーリに1層にまかれ、前記プーリはモータおよび付随する変速機によって駆動され、前記モータは少なくとも2つの荷重範囲での使用に適し、前記変速機はアクチュエータの荷重持ち上げ能力を決定するビルディングブロック構造のギア減速装置構造を備え、
前記荷重インタフェースは、前記ケーブルの前記端部に操作可能に接続されていて、ユーザコントローラを含み、前記コントローラへ伝送される信号を生成し、前記信号に応じて前記コントローラが前記アクチュエータに吊下げられた荷重を持ち上げたり下したりする動作を前記アクチュエータにさせることを特徴とするリフトシステム。
【請求項2】
請求項1に記載のリフトシステムであって、前記変速機のギア減速機として使用される遊星歯車減速機をさらに備えることを特徴とするリフトシステム。
【請求項3】
請求項1に記載のリフトシステムであって、圧縮式荷重センサをさらに備え、前記センサは前記アクチュエータと動作可能に接続され、前記センサはケーブルにかかる荷重に応じて前記アクチュエータの要素からかかる圧縮荷重を検知することを特徴とするリフトシステム。
【請求項4】
請求項3に記載のリフトシステムであって、前記アクチュエータの要素がアームをからなり、前記アームが前記プーリ、モータおよび変速機に付随するアームであって、前記アームが荷重に応じて回転方向に移動することを特徴とするリフトシステム。
【請求項5】
請求項1に記載のリフトシステムであって、前記コントローラに接続されている通信回路をさらに備え、前記通信回路は前記コントローラに遠隔コンピュータとの通信を可能とすることを特徴とするリフトシステム。
【請求項6】
請求項5に記載のリフトシステムあって、前記遠隔コンピュータとの前記通信は遠隔診断情報の伝送を含むことを特徴とするリフトシステム。
【請求項7】
請求項1に記載のリフトシステムであって、前記アクチュエータがスライドゲートをさらに備え、前記ケーブルの自由端が前記プーリから離れる際に前記スライドゲートを通ることを特徴とするリフトシステム。
【請求項8】
請求項7に記載のリフトシステムであって、前記スライドゲートが前記プーリと動作可能に付随していて、前記プーリが回転し前記ケーブルが巻き取られまたは送り出されるときの整合が維持されることを特徴とするリフトシステム。
【請求項9】
請求項8記載のリフトシステムであって、前記ゲートが前記プーリの回転に応じて前記プーリを前記プーリの長手方向に横切るように移動し、前記ゲートの位置を検知して前記プーリからのケーブルの送り量を判定することに適した少なくとも1つの移動センサをさらに備えるリフトシステム。
【請求項10】
請求項9に記載のリフトシステムであって、リフトシステムが移動リミットに至ったときに前記少なくとも1つの移動センサが信号を生成することを特徴とするリフトシステム。
【請求項11】
コントローラと、アクチュエータと、荷重インタフェースと、ロードセルと、を備えたリフトシステムであって、
前記アクチュエータは、前記コントローラに応答し、前記アクチュエータはケーブルを取り付けたプーリを備え、前記ケーブルの自由端部において荷重を支持し、前記プーリはモータおよび付随する変速機によって駆動され、
前記荷重インタフェースは、前記ケーブルの前記端部に操作可能に接続されていて、ユーザコントロール含み、前記コントローラへ伝送される信号を生成し、前記コントローラが前記信号に応じて前記アクチュエータに吊下げられた荷重を持ち上げたり下したりする動作を前記アクチュエータにさせ、
前記ロードセルは、ケーブルにかかる荷重に応答して圧縮力のみを検出するのに適し、前記コントローラに伝送される荷重信号を生成し、前記コントローラが前記アクチュエータに前記荷重信号に応じた動作をさせることを特徴とするリフトシステム。
【請求項12】
コントローラと、アクチュエータと、荷重インタフェースと、ロードセルと、を備えたリフトシステムであって、
前記アクチュエータは、前記コントローラに応答し、前記アクチュエータはケーブルを取り付けたプーリを備え、前記ケーブルの自由端において荷重を支持し、前記プーリはモータおよび付随する変速機によって駆動され、
前記荷重インタフェースは、前記ケーブルの前記端部に操作可能に接続されていて、ユーザコントローラを含み、前記コントローラへ伝送される信号を生成し、前記信号に応じて前記コントローラが前記アクチュエータに吊下げられた荷重を持ち上げたり下したりする動作を前記アクチュエータにさせ、少なくとも1つのユーザコントローラがコアの相対的な動きの検知のためのコイルを使用して信号を生成し、前記コアはスライドするハンドルに可撓な部品を用いて接続されており、
前記ロードセルは圧縮力のみを検出するのに適し、前記コントローラに伝送される荷重信号を生成し、前記コントローラが前記アクチュエータに前記荷重信号に応じた動作をさせることを特徴とするリフトシステム。
【請求項13】
請求項12に記載のリフトシステムであって、電気信号を伝送する回転可能なスリップリングアセンブリと、前記アセンブリを通過する圧縮流体とをさらに備えることを特徴とするリフトシステム。
【請求項14】
請求項12に記載のリフトシステムであって、前記ハンドル上のオペレータの手の存在を検知するのに適した反射式光電センサをさらに備えることを特徴とするリフトシステム。
【請求項15】
請求項12に記載のリフトシステムであって、前記荷重インタフェースは液晶ディスプレイを備え、前記液晶ディスプレイは前記コントローラから伝送された情報を表示することを特徴とするリフトシステム。
【請求項16】
コントローラと、アクチュエータと、荷重インタフェースと、を備えたリフトシステムであって、
前記アクチュエータは前記コントローラに応答し、前記アクチュエータはケーブルを取り付けたプーリを備え、前記ケーブルの自由端部において荷重を支持し、前記プーリはモータおよび付随する変速機によって駆動され、前記アクチュエータは動作可能に前記プーリに設けられたスライドするガイドをさらに備え、前記スライドするガイドは前記プーリが回転し前記ケーブルが巻き取られるときまたは送り出されるときの整合を維持し、
前記荷重インタフェースは、前記ケーブルの前記端部に操作可能に接続されていて、ユーザコントローラを含み、前記コントローラへ伝送される信号を生成し、前記コントローラが前記信号に応じて前記アクチュエータに吊下げられた荷重を持ち上げたり下したりする動作を前記アクチュエータにさせることを特徴とするリフトシステム。
【請求項17】
請求項16に記載のリフトシステムであって、前記ガイドはプーリの回転に応じて前記プーリを前記プーリの長手方向に横切るように移動し、前記ガイドの位置を検知することに適した少なくとも1つの移動センサ前をさらに備え、前記プーリから送り出されたケーブルの量を示すことを特徴とするリフトシステム。
【請求項18】
請求項17に記載のリフトシステムであって、前記リフトシステムが移動リミットに達したときに前記少なくとも1つの移動センサが信号を生成することを特徴とするリフトシステム。
【請求項19】
コントローラと、電気モータと、オペレータインタフェースと、フレームと、荷重センサと、弛みセンサと、ユニバーサルなモータおよび減速機アセンブリと、遊星歯車減速装置と、ケーブルガイドと、ケーブルリミットセンサと、を備えたリフトアクチュエータであって、
前記電気モータはアクチュエータを駆動させるためのものであって、コントローラからの制御信号に応じて作動し、ワイヤロープが巻かれているドラムを駆動し、
前記オペレータインタフェースは、前記ワイヤロープの自由端の近傍に設けられた取り外し可能な持ち上げ具を備え、オペレータから前記コントローラへの信号を与えてアクチュエータの動作を制御し、
前記フレームは、前記モータ、減速装置およびドラムを備えた駆動アセンブリ全体を回転可能に支持するためのものであって、
前記荷重センサは、前記フレームに設けられ、前記ワイヤロープの自由端に荷重がかかったときに、駆動アセンブリ全体の回転による荷重を検出し、
前記弛みセンサは、前記駆動アセンブリ全体の方位角または回転角を検出し、弛み状態の存在を前記弛みセンサからの信号に応じて判定するためのものであり、
前記ユニバーサルモータ減速アセンブリは、前記アクチュエータの能力範囲を変更するための複数の追加的減速機の一に設けられ、
前記遊星歯車減速機は、前記減速機の遊星歯車構成が前記ローププーリドラムにほぼ収容されており、
前記ケーブルガイドは、前記ドラムに巻き取られるまたは送り出されるときの前記ケーブルの位置を制御し、
前記ケーブルリミットセンサは、前記ケーブルが巻き取られるときまたは送り出されるときの前記ケーブルガイドの横方向移動に応じてトリガされ、
前記ケーブルガイドは、前記ドラム上の溝とかみ合う複数のスレッドを備えて、前記ケーブルが巻き取られるときまたは送りだされるときに前記ガイドを動かす横方向の力を与えることを特徴とするリフトアクチュエータ。
【請求項20】
ハンドルと、ピボット運動可能なカップリングと、スリップリングと、コイルセンサと、液晶ディスプレイと、非接触型の近接センサと、を備える請求項19に記載のリフトアクチュエータであって、
前記カップリングは、前記ロープに前記インタフェースを取り付けるためのものであるが、前記ロープに対しての360度回転を可能とするカップリングであり、
前記スリップリングは、電気的接触およびエアチャンネルまたはコンジットを提供するのに適した平たいスリップリングであり、
前記コイルセンサは、前記ハンドルに与えられた変位の垂直方向成分を検出するためのもので、前記ハンドルは前記コイルの中を通っているコアと可撓な線材によって結合されており、
前記液晶ディスプレイは、オペレータに状態情報を表示するために前記インタフェース上に設けられ、
前記近接非接触センサは、オペレータの手が操縦中に前記ハンドルの上に存在することを検知することを特徴とするリフトアクチュエータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図13A】
【図13B】
【図13C】
【図14】
【図15A】
【図15B】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図13A】
【図13B】
【図13C】
【図14】
【図15A】
【図15B】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公表番号】特表2009−523684(P2009−523684A)
【公表日】平成21年6月25日(2009.6.25)
【国際特許分類】
【出願番号】特願2008−551351(P2008−551351)
【出願日】平成19年1月17日(2007.1.17)
【国際出願番号】PCT/US2007/001220
【国際公開番号】WO2007/084553
【国際公開日】平成19年7月26日(2007.7.26)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
【出願人】(508214961)ゴーベル インコーポレイテッド (1)
【公表日】平成21年6月25日(2009.6.25)
【国際特許分類】
【出願日】平成19年1月17日(2007.1.17)
【国際出願番号】PCT/US2007/001220
【国際公開番号】WO2007/084553
【国際公開日】平成19年7月26日(2007.7.26)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
【出願人】(508214961)ゴーベル インコーポレイテッド (1)
[ Back to top ]