
リフト機構の荷重保持機構

【課題】リフト機構が降下時に急停止したときに発生する応力を低減できるリフト機構の荷重保持機構を提供すること。
【解決手段】ねじ軸4に螺合されたナット部材9を昇降するリフト機構の荷重保持機構において、モータ1からの動力によって回転駆動される円筒部材25と、円筒部材と同心状に配置された外輪24と、円筒部材と外輪の間に設けられ、円筒部材と外輪の一方向の相対回転は許可するが他方向の相対回転は禁止するワンウェイクラッチ機構23と、外輪を摩擦力で保持する電磁ブレーキ15とを備える。
【解決手段】ねじ軸4に螺合されたナット部材9を昇降するリフト機構の荷重保持機構において、モータ1からの動力によって回転駆動される円筒部材25と、円筒部材と同心状に配置された外輪24と、円筒部材と外輪の間に設けられ、円筒部材と外輪の一方向の相対回転は許可するが他方向の相対回転は禁止するワンウェイクラッチ機構23と、外輪を摩擦力で保持する電磁ブレーキ15とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はねじ軸に螺合されたナット部材を昇降するリフト機構の荷重保持機構に関する。
【背景技術】
【0002】
産業機械及び建設機械を含む作業機械には対象物(例えば、荷物)を持ち上げるためのリフト機構を備えるものがある。例えば、荷役作業に使用されるフォークリフトには、リフト機構として、フォークを昇降させるためのマストが車両前方に備えられている。この種のリフト機構は、従来、油圧シリンダを用いた油圧駆動によるものが多かった。しかし、駆動効率の向上や回生エネルギの有効的な取得等による省エネルギ化を目指し、ねじ軸及びこれに螺合されたナット部材を備えたねじ機構(例えば、ボールねじ等)と、その駆動源としての電動モータ(電動機)とを組み合わせた電動リニアアクチュエータ(電動直動アクチュエータ)を利用したリフト機構の開発が進んでいる。
【0003】
電動リニアアクチュエータを利用したリフト機構では、回生エネルギをより多く取得する観点からは、ねじ機構の逆効率(直動を回転に変換する際の機械効率)が高い方が望ましい。しかし、このように逆効率を高くすると、荷物の自重による落下の可能性が高くなる点に配慮することが必要である。
【0004】
また、油圧シリンダを用いた油圧駆動式のリニアアクチュエータでは、当該油圧シリンダに圧油を供給するための回路に設置されたバルブを開く量で荷物(リフト機構)の昇降速度をコントロールし、当該バルブを完全に閉じることで荷物を停止させていた。一方、電動リニアアクチュエータでは、電動モータのトルクで荷物の昇降速度をコントロールし、ナット部材の移動を抑制するブレーキのオン/オフで荷物を停止させている。そのため、電動モータの制御とブレーキの制御という2つの制御が必要となる。この2つの制御のタイミングがわずかにずれると、荷物が昇降されているときにブレーキが作用し急停止するなどの状態が発生し、リフト機構に衝撃荷重が作用してしまうおそれがある。
【0005】
この点を鑑み、停止状態の荷物を上昇させるとき及び上昇中の荷物を停止させるときの制御を電動モータの制御のみで実施しようとした技術がある(特許文献1,2参照)。特許文献1の技術では、電動モータの回転軸にワンウェイクラッチと呼ばれる一方向のみの回転を許容する機構を挿入し、荷物を上昇させる方向の回転は許容するが荷物を降下させる方向の回転は許容しない(回転させない)構成としている。このため、電動モータのトルクで荷物を上昇させた後に当該トルクを0にすると、荷物は自重で降下しようとするが、ワンウェイクラッチが機能するので荷物を停止できる。また、当該技術は通電時にワンウェイクラッチを解除する機構(保持器制御ソレノイド)を備えているため、荷物を降下させる際には当該解除機構に通電してワンウェイクラッチを解除すれば良い。
【0006】
特許文献2は、特許文献1と同様に回転軸にワンウェイクラッチを挿入した構成である。特許文献1と異なるのは、ワンウェイクラッチ外輪が固定されていない点であり、そのかわりにワンウェイクラッチ外輪にはブレーキディスクが取付けられている。このブレーキディスクは、ブレーキシュがばねによって常に押し付けられている。このため、ワンウェイクラッチが回転を許容する方向にしか回転することができない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010-112409号公報
【特許文献2】特開平2-21040号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記特許文献1では、荷物の降下中にワンウェイクラッチの解除機構への電源供給が断線やバッテリー切れ等で遮断されると、ワンウェイクラッチが動作してしまうので、ねじ軸に動力を伝達する軸の回転が急激に阻止される。この急停止により、ワンウェイクラッチの各部材に過大な接触応力が働くおそれがある。
【0009】
一方、上記特許文献2では、ワンウェイクラッチが作用する方向には、常にブレーキディスクによりブレーキ力が作用するため、荷物を降下させることができない。なお、ブレーキディスクのブレーキトルク以上のトルクを電動モータによって与えれば荷物を降下させることができるが、この場合には、回生エネルギを取得することができないだけでなく、必要以上のトルクを発生させなければならないため、エネルギ消費を低減する観点からは好ましくない。
【0010】
本発明の目的は、回生エネルギを有効的に取得できる機構であることを前提とし、リフト機構が降下時に急停止したときに発生する応力を低減できるリフト機構の荷重保持機構を提供することにある。
【課題を解決するための手段】
【0011】
本発明は、上記目的を達成するために、ねじ軸に螺合されたナット部材を昇降するリフト機構の荷重保持機構において、前記リフト機構の駆動源からの動力によって回転駆動される第1回転体と、前記第1回転体と同心状に配置された第2回転体と、前記第1回転体と前記第2回転体の間に設けられ、前記第1部材と前記第2部材の一方向の相対回転は許可するが他方向の相対回転は禁止するワンウェイクラッチ機構と、前記第2回転体を摩擦力で保持するブレーキとを備えるものとする。
【発明の効果】
【0012】
本発明によれば、リフト機構が降下時に急停止したときに発生する応力を低減できる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態におけるリフト機構の全体構成の側断面図。
【図2】本発明の実施の形態に係る荷重保持機構100の詳細図。
【図3】図2中のA−A断面図。
【図4】本発明の他の実施の形態に係る荷重保持機構100Aの断面図。
【図5】本発明の実施の形態に係るリフト機構を備えたフォークリフトの概略構成図。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面を用いて説明する。
図1は本発明の実施の形態におけるリフト機構の全体構成の側断面図である。この図に示すリフト機構は、電動リニアアクチュエータを利用して荷物等の対象物の昇降を行うものであり、ねじ軸4と、ねじ軸4に螺合されたナット部材9と、ねじ軸4を回転駆動するための原動機としてのモータ(電動機)1と、主にナット部材9に作用する荷重を保持するための荷重保持機構100と、リフト機構の操作装置(図示せず)を介して入力されるオペレータの操作に基づいて主にモータ1及び荷重保持機構100を制御するための制御装置200を備えている。
【0015】
モータ1はリフト機構の駆動源であり、モータ1の出力軸1aの一方(図1中の上側)には、モータ1の回転を停止させ、ナット部材9を停止させるためのブレーキ11が取り付けられている。
【0016】
また、モータ1の出力軸1aの他方(図1中の下側)には荷重保持機構100と小歯車2が取り付けられている。小歯車2には大歯車3が噛み合わされている。モータ1による動力の回転は、小歯車2から大歯車3に回転が伝達される際に互いの歯数に応じて適宜減速される。すなわち、入力側の歯車が大きいと増速し、小さいと減速される。本実施の形態では、出力側の歯車3に対して入力側の歯車2が小さいため回転は減速される。
【0017】
大歯車3にはねじ軸4が固定されている。小歯車2はラジアル軸受5とモータ1の軸受によって回転可能に支持されている。大歯車3とねじ軸4が一体化されたものは、ラジアル軸受6により回転可能に支持されており、ねじ軸4の軸方向に発生する推力による反力はスラスト軸受7によって支持されている。上記の各構成によって、モータ1からねじ軸4への回転駆動力の伝達経路が構成されている。なお、上記の各軸受などは、固定部品である下部ハウジング8と上記回転駆動力の伝達経路の各回転部品との間に組み込まれている。
【0018】
ねじ軸4と、ねじ軸4にねじ対偶で装着されたナット部材9とは、ねじ機構を構成しており、両者4,9は相対的に回転することでねじ軸4の軸方向に相対的に移動する。本実施の形態におけるナット部材9は、ねじ軸4とナット部材9が転がり接触で接触しており、ねじ軸4とナット部材9の間の摩擦抵抗はすべり接触の場合に比べて大幅に小さくなっている。この転がり接触を行うねじ機構の例としては、特許文献1に示されているボールねじ機構等が挙げられる。
【0019】
ナット部材9の上面には直動出力部材10が固定されている。直動出力部材10の内部は中空になっており、これによりねじ軸4との干渉を回避している。また、本実施の形態における直動出力部材10は、図1中に一点鎖線で示した他のリニアアクチュエータの直動出力部材10Aと連結部材12を介して連結されている。ナット部材9は、連結部材12及び直動出力部材10Aによってねじ軸4の回転中心回りに回転不能に拘束されている。これによりねじ軸4を回転駆動させるとナット部材9が円筒状の上部ハウジング14内を上下方向に移動する。なお、直動出力部材10およびナット部材9の中心軸回りの回転を阻止して軸方向への移動を許容する他の構成としては、上部ハウジング14の内周面14aにキー溝を設け、当該キー溝に対応するすべりキーを直動出力部材10又はナット部材9に設ける構成等がある。
【0020】
下部ハウジング8の上には中央ハウジング13が固定されている。中央ハウジング13の上部には上部ハウジング14が固定されている。上部ハウジング14は、その内周面14aによってナット部材9およびねじ軸4が傾斜しないように支持する機能を果たしている。また、直動出力部10が上部ハウジング14を貫通する部分にはシール(図示せず)が設けられており、当該シールによってねじ軸4とナット部材9によるねじ対偶部にゴミ等の異物が侵入するのを防止している。なお、本実施の形態における荷重保持機構100は、中央ハウジング13とモータ1の間に組み込まれている。
【0021】
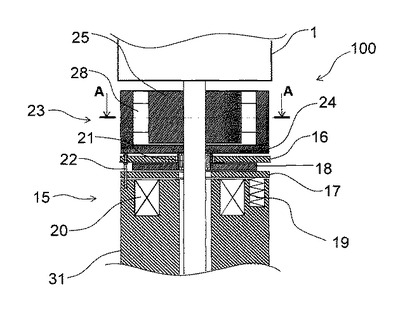
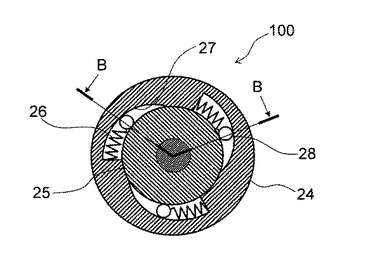
図2は、図1に示した荷重保持機構100の詳細図であり、図3中のB−B断面図である。また、図3は図2中のA−A断面図である。なお、先の図と同じ部分には同じ符号を付して説明は省略する(後の図も同様とする)。
【0022】
荷重保持機構100は、円筒部材(第1回転体)25と、外輪(第2回転体)24と、ワンウェイクラッチ機構23と、電磁ブレーキ15を備えている。
【0023】
円筒部材25は、モータ1からねじ軸4への回転駆動力の伝達経路に設置された部材であり、モータ1からの動力によって回転駆動される。本実施の形態における円筒部材25は、モータ1の出力軸1aの回転軸心と同心状に形成された円筒状の部材であり、出力軸1aの外周面上に固定されている。これにより円筒部材25は出力軸1aとともに一体に回転する。
【0024】
外輪24は、円筒部材25の外周側に出力軸1aの回転軸心(すなわち、円筒部材25の回転軸心)と同心状に配置された中空円筒状の部材である。外輪24の底面における中心部には孔が設けられており、当該孔には出力軸1aが挿入されている。また、当該孔の周囲には軸受21が設けられており、外輪24は軸受21を介して出力軸1aに対して回転可能に支持されている。また、外輪24の底面にはブレーキディスク18が連結されている。ブレーキディスク18にはモータ1の出力軸1aが挿入されており、ブレーキディスク18は外輪24と同様に軸受け21を介して出力軸1aに対して回転可能に支持されている。
【0025】
電磁ブレーキ15は、ブレーキ本体31と、ブレーキディスク18を挟んで出力軸1aの軸方向に配置された2つのブレーキパッド16,17と、ばね19と、コイル20を備えており、ブレーキディスク18とブレーキパッド16,17の間に発生する摩擦力で外輪24を保持する無励磁作動型の制動装置である。
【0026】
ブレーキ本体31は、中央ハウジング13(図1参照)に固定されている。ブレーキ本体31には、出力軸1aの軸方向と略平行に保持されたピン22が取り付けられている。ピン22は、2つのブレーキパッド16,17に挿入されている。ブレーキ本体31側のブレーキパッド17は、磁性体で形成されており、出力軸1aの軸方向に上下動可能にピン22によって支持されている。一方、外輪24側のブレーキパッド16は出力軸1aの軸方向に上下動不可能にピン22に固定されている。
【0027】
ばね19は、ブレーキパッド17をブレーキパッド18側(図2中の上方向)に付勢するためのもので、ブレーキ本体31の上面に設けた凹部内に撓んだ状態で収納されている。電磁ブレーキ15のブレーキトルクは主にばね19によって規定される。図2では簡略してばね19を1つ表記したが、電磁ブレーキ15のブレーキトルクが所望の値になるように複数のばね19が適宜設置されている。
【0028】
なお、通常のリフト動作時にブレーキディスク18が滑らない範囲でワンウェイクラッチ機構23に作用するトルクを最小とする観点からは、電磁ブレーキ15のブレーキトルクは、図1に示したリフト機構(ナット部材9)に最大積載荷重が作用するときに外輪24を静的に保持するために必要なトルクと同等とすることが好ましい。さらに、電磁ブレーキ15のブレーキトルクは、最大でも最大積載荷重が作用するときに外輪24を静的に保持するために必要なトルクの数倍程度になるように設定することが好ましい。これは、ブレーキトルクを大きくしすぎると、ブレーキディスク18が滑り始めるトルクが必要以上に大きくなってしまい、結果的にワンウェイクラッチ機構23の各部材に作用する接触力が大きくなってしまうからである。また、ブレーキトルクを大きくしすぎると、ワンウェイクラッチ23のサイズが大きくなってしまうので、この観点からもブレーキトルクを大きくしすぎることは望ましくない。
【0029】
コイル20は、ブレーキ本体31内に収納されており、通電時には電磁力を発生してブレーキパッド17を吸着する。コイル20に通電して電磁力を発生させると、ばね19の付勢力に抗してブレーキパッド17がブレーキ本体31側(コイル20側)に吸着され、ブレーキパッド17がブレーキディスク18から離間してブレーキが解除される。一方、非通電時には電磁力が発生しないので、ばね19の付勢力によってブレーキパッド17がブレーキディスク18に押し付けられ、ブレーキディスク18とブレーキパッド16,17の間に発生する摩擦力によりブレーキが作動した状態となる。これにより外輪24は電磁ブレーキ15によって保持される。すなわち、本実施の形態における電磁ブレーキ15は、通電時にブレーキ解除状態(外輪24がブレーキ本体31に対して相対回転可能な状態)となり、非通電時(電源供給遮断時など)にブレーキ作動状態(外輪24がブレーキ本体31に対して相対回転不可能な状態)となる無励磁作動型ブレーキとして機能する。
【0030】
ワンウェイクラッチ機構23は、円筒部材25と外輪24の一方向(図3中の左回り方向(以下、正転方向と称することがある))の相対回転は許容するが、他方向(図3中の右回り方向(以下、逆転方向と称することがある))の相対回転を禁止するための機構であり、円筒部材25と外輪24の間に設けられている。図3に示す例では、ワンウェイクラッチ機構として、溝部27と、ローラ(転動体)28と、ばね(付勢手段)26を備えている。また、ここでいう「正転方向」とは、リフト機構(ナット部材9)の上昇時にモータ1の出力軸1aが回転する方向とし、「逆転方向」とは、リフト機構の下降時に出力軸1aが回転する方向とする。
【0031】
溝部27は、出力軸1aの半径方向(円筒部材25又は外輪24の半径方向)における幅が逆転方向に向かって縮小する溝であり、本実施の形態では互いに対向する円筒部材25の外周面と外輪24の内周面のうち外輪24の内周面に設けられている。この溝部27によって、外輪24の内周面と円筒部材25の外周面との間には逆転方向に向かって幅が縮小する間隙が形成される。また、本実施の形態における溝27は、図3に示すように外輪25の周方向に所定の間隔(120度の角度ピッチ)を介して3つ設けられている。
【0032】
ローラ28は、各溝部27に収納された転動体であり、本実施の形態では円筒状に形成されている。ばね26は、溝部27に収納された付勢手段であり、逆転方向に向かってローラ28を付勢している。これによりローラ28は、円筒部材25の外周面と外輪24の内周面(溝部27)の双方に接触した状態で保持される。
【0033】
ここでワンウェイクラッチ機構23の動作について説明する。ワンウェイクラッチ機構23を動作させる場合には、コイル20を非通電状態として電磁ブレーキ15によるブレーキ作動させる必要がある。一方、ワンウェイクラッチ機構23の動作を解除する場合には、コイル20を通電状態としてブレーキを解除する必要がある。
【0034】
まず、電磁ブレーキ15のコイル20が非通電状態の場合には、ブレーキディスク18がブレーキパッド16,17と接触することでブレーキが作動して、外輪24がブレーキ本体31(中央ハウジング13)に対して相対回転不可能な状態となる。このとき円筒部材25が逆転方向に回転すると、円筒部材25の回転に伴ってローラ28が溝部27の幅が縮小する方向に転動し、円筒部材25と外輪24の隙間にローラ28が食い込む。これにより円筒部材25の逆転方向へのそれ以上の回転が阻止される。一方、円筒部材25が正転方向に回転すると、円筒部材25の回転に伴ってローラ28が溝部27の幅が拡大する方向に転動するので、円筒部材25と外輪24の隙間にローラ28が食い込むことは無い。これにより円筒部材25は正転方向に回転可能となる。
【0035】
一方、コイル20が通電状態の場合には、ブレーキが解除され、外輪24がブレーキ本体31に対して相対回転可能な状態となる。この場合には、正転方向及び逆転方向のいずれの方向に回転させても円筒部材24は回転可能である。これは、円筒部材25を逆転方向に回転させてローラ28を円筒部材25と外輪24の隙間に食い込ませても、外輪24自体が回転可能なため、円筒部材25は外輪24と一体となって回転するからである。このように、本実施の形態に係るリフト機構では、電磁ブレーキ15を解除することで、ワンウェイクラッチ機構23の作動を解除することができる。
【0036】
図1に戻り、制御装置200は、上記のようにコイル20への通電を制御することで行われる電磁ブレーキ15の制御処理と、モータ1のトルク制御処理とを荷物の昇降に応じて実行するものであり、電磁ブレーキ15及びモータ1にそれぞれ制御信号を出力している。なお、制御装置200は、ハードウェア構成として、各種の制御プログラムを実行するための演算処理装置(例えば、CPU)、当該制御プログラムをはじめ各種データを記憶するための記憶装置(例えば、ROM、RAM)等を備えている(いずれも図示せず)。
【0037】
上記のように構成されるリフト機構の動作について、リフト(ナット部材9)の上昇及び下降のそれぞれの場合について説明する。
【0038】
まず、リフト機構の上昇時及び停止時には、制御装置200はコイル20を非通電状態にする。これにより外輪24の回転は電磁ブレーキ15により拘束されるので、ワンウェイクラッチ機構23が動作可能な状態となる。この場合、本実施の形態に係るワンウェイクラッチ機構23は、既述のようにリフトの上昇方向(正転方向)への円筒部材25の回転を許容するため、電磁ブレーキ15が作動状態のままでもモータ1のトルクを上昇させることでリフトの上昇が可能である。
【0039】
リフト機構の上昇を停止するときには、制御装置200はモータ1のトルクを0にする。このようにモータ1のトルクを0にすると、荷物の自重によりリフトは下降しようとする。しかし、ワンウェイクラッチ機構23の機能により下降方向(逆転方向)への円筒部材24の回転は許容されないため、荷物は下降することなく停止する。したがって、上昇している荷物を停止する場合には、電磁ブレーキ15を動作させつつモータ1のトルクを0にすることで可能である。
【0040】
一方、リフト機構を降下する場合にはワンウェイクラッチ機構23を解除する必要がある。そのため、制御装置200は、コイル20を通電状態にし、電磁ブレーキ15によるブレーキを解除する。これにより外輪24がブレーキ本体31に対して相対回転可能になり、リフトが下降可能な状態になる。このような状態になったら、制御装置200は、モータ1のトルクを制御することによりリフトを適切な速度で下降させる。このとき、電磁ブレーキ15による摩擦トルクは発生しないため、モータ1による回生エネルギの取得が可能になる。
【0041】
リフト機構の降下を停止する場合には、制御装置200は、まず、モータ1のトルクを制御してリフト機構の降下速度を0に保持し、その後にコイル20を非通電状態として電磁ブレーキ15を作動させる。これにより電磁ブレーキ15がリフトの停止前に作動することが回避できるので、荷重保持機構100の各構成要素に衝撃荷重を与えることなくリフトの降下を停止することができる。
【0042】
なお、リフト機構の降下を停止する場合には、上記のようにリフト機構の降下速度を0に保持することに代えて、制御装置200によって、リフト機構の降下が停止する直前に、リフト機構が上昇するようにモータ1のトルクを制御し、これによりリフト機構の移動方向が下降から上昇に変化した直後(すなわち、上昇し始めた直後)にコイル20を非通電状態として電磁ブレーキ15を作動させることが好ましい。そして、このように電磁ブレーキ15を作動させた直後に、制御装置200によってモータ1のトルクを減少させると良い。この制御では、先に説明した場合のようにモータ1の制御によりリフト機構の下降速度をほぼ0に保持する制御を行わなくても、ナット部材9が下降を始めようとする時にワンウェイクラッチ機構23が作動するため、速度がほぼ0に近い状態でリフト機構を停止することができる。つまり、ワンウェイクラッチ機構23に過大な接触応力が作用することなく停止することが可能となる。
【0043】
上記のように構成されたリフト機構では、予期せぬトラブル(例えば、断線やバッテリ切れ等)によってコイル20への通電が突然遮断された場合には、無励磁作動型の電磁ブレーキ15が作動してワンウェイクラッチ機構23が作動するので荷物の落下を防止することができる。特に本実施の形態に係る電磁ブレーキ15は、ブレーキディスク18とブレーキパッド16,17の間に発生する摩擦力によって外輪24の回転を拘束してリフト機構を急停止するので、当該摩擦力以上のトルクが作用した場合にはブレーキディスク18を滑らせることができる。このため、ワンウェイクラッチ機構23には電磁ブレーキ15のブレーキトルク以上のトルクが作用することはなく、ワンウェイクラッチ機構23に過大な接触荷重が作用することを防止できるので、ワンウェイクラッチ機構23の破損が防止できる。また、これによりワンウェイクラッチ機構23を小型化することができる。
【0044】
また、上記の構成により、電磁ブレーキ15への通電の有無でワンウェイクラッチ機構23の作動及び解除を切り替えることができるため、非通電時はブレーキ15が作動しワンウェイクラッチ状態、通電時はブレーキ15が解除されどちらの回転も許容された状態となり、片方向のみ回転が許容された状態と両方向の回転が許容された状態を切り替えることが可能となる。これにより、リフトを上昇させる時はワンウェイクラッチ状態とすることでモータトルクの制御のみでリフト動作を行えるようにし、下降させる時には両方の回転が許容された状態とすることで回生エネルギを有効取得できるようになる。
【0045】
したがって、本実施の形態によれば、通常時にはリフト機構の降下時に回生エネルギが取得できるとともに、降下時にリフト機構が急停止する非常時にはその際に発生する応力を低減することができる。
【0046】
なお、上記の説明では、電磁ブレーキ15のブレーキトルクは、リフト機構に最大積載荷重が作用するときに外輪24を静的に保持するために必要なトルクを基準とすると、当該基準トルク以上とし、最大でも数倍程度に設定することが好ましいとした。しかし、さらに好ましくは、電磁ブレーキ15のブレーキトルクは、当該基準トルクの1.5〜2.0倍とすると良い。このように電磁ブレーキ15のブレーキトルクを設定すると、例えば、外部から加速度0.2G〜0.6G程度の振動がリフト機構に作用し、さらに電磁ブレーキ15のブレーキトルクに2割程度のばらつきがあったとしても、通常動作時にブレーキディスク18は滑らないが過大トルクが作用すると滑るという動作を実現できる。これは、電磁ブレーキ15のブレーキトルクに2割程度のばらつきがあった場合でも、ブレーキトルクは上記基準に対して最低でも1.2倍〜1.6倍のトルクを有することとなるため、加速度0.2G〜0.6Gの振動が作用してもブレーキディスクが滑ることはないからである。
【0047】
また、上記の実施の形態では、外輪24の内周面上に溝部27を設けてワンウェイクラッチ機構23を構成したが、これに代替して円筒部材25の外周面上に溝部を設けて当該機構を構成しても良い。図4は、本発明の他の実施の形態に係る荷重保持機構100Aの断面図であり、図2中のA−A断面に相当する面で荷重保持機構100Aを切断したときのものである。この図に示す荷重保持機構100Aは、円筒部材25Aと、外輪24Aを備えている。円筒部材25Aには、出力軸1aの半径方向における幅が逆転方向に向かって縮小する溝であり、円筒部材25Aの外周面に設けられた溝部27Aが設けられている。このように円筒部材25A側に溝部27Aを形成しても先に説明した実施の形態と同様にワンウェイクラッチ機構を構成することができるので、同様の効果を奏することができる。
【0048】
さらに、上記の各実施の形態では、モータ1によって円筒部材25Aを回転駆動し、外輪24Aを電磁ブレーキ15で保持する場合について説明したが、モータ1で外輪24Aを回転駆動し、円筒部材25Aを電磁ブレーキ15で保持するようにリフト機構を構成しても同様の効果を奏することができる。
【0049】
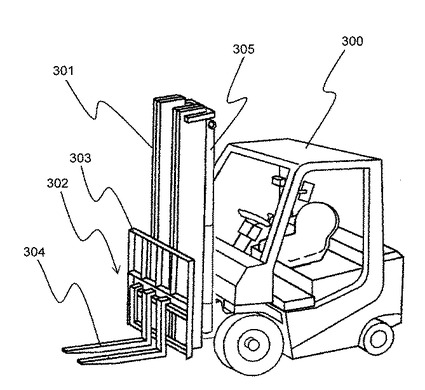
次に上記の実施の形態に係るリフト機構の適応例について説明する。図5は本発明の実施の形態に係るリフト機構を備えたフォークリフト(作業機械)の概略構成図である。この図において、フォークリフトの本体300の前方には一対のマスト301が取り付けられており、マスト301には荷物昇降部302が付設されている。荷物昇降部302は、リフトブラケット(図示せず)を介してマスト301の内枠に昇降自在に取り付けられた保持枠303と、保持枠303に取り付けられた一対のフォーク304を備えている。上記の実施の形態で説明したリフト機構305は、ねじ機構によって荷物昇降部302を昇降させるために用いられており、例えばマスト301の運転席側に設置することができる。
【0050】
なお、ここではリフト機構305の適用例としてフォークリフトを例に挙げたが、ねじ軸の回転によって昇降されるナット部材を有する電動リニアアクチュエータを備えるものであれば、本発明に係る荷重保持機構及びリフト機構はフォークリフトに限らず種々の作業機械に適用可能である。
【符号の説明】
【0051】
1…モータ、1a…モータ出力軸、2…小歯車、3…大歯車、4…ねじ軸、5…ラジアル軸受、6…ラジアル軸受、7…スラスト軸受、8…下部ハウジング、9…ナット部材、10…直動出力部、11…ブレーキ、12…連結部材、13…中央ハウジング、14…上部ハウジング、14a…内周面、15…電磁ブレーキ、16…ブレーキパッド、17…ブレーキパッド、18…ブレーキディスク、19…ばね、20…コイル、21…軸受、22…ピン、23…ワンウェイクラッチ機構、24…外輪(第2回転体)、24A…外輪(第2回転体)、25…円筒部材(第1回転体)、25A…円筒部材(第1回転体)26…付勢ばね、27…溝部、27A…溝部28…ローラ(転動体)、100…荷重保持機構、100A…荷重保持機構、200…制御装置、300…フォークリフト本体、301…マスト、302…荷物昇降部、303…保持枠、304…フォーク、305…リフト機構
【技術分野】
【0001】
本発明はねじ軸に螺合されたナット部材を昇降するリフト機構の荷重保持機構に関する。
【背景技術】
【0002】
産業機械及び建設機械を含む作業機械には対象物(例えば、荷物)を持ち上げるためのリフト機構を備えるものがある。例えば、荷役作業に使用されるフォークリフトには、リフト機構として、フォークを昇降させるためのマストが車両前方に備えられている。この種のリフト機構は、従来、油圧シリンダを用いた油圧駆動によるものが多かった。しかし、駆動効率の向上や回生エネルギの有効的な取得等による省エネルギ化を目指し、ねじ軸及びこれに螺合されたナット部材を備えたねじ機構(例えば、ボールねじ等)と、その駆動源としての電動モータ(電動機)とを組み合わせた電動リニアアクチュエータ(電動直動アクチュエータ)を利用したリフト機構の開発が進んでいる。
【0003】
電動リニアアクチュエータを利用したリフト機構では、回生エネルギをより多く取得する観点からは、ねじ機構の逆効率(直動を回転に変換する際の機械効率)が高い方が望ましい。しかし、このように逆効率を高くすると、荷物の自重による落下の可能性が高くなる点に配慮することが必要である。
【0004】
また、油圧シリンダを用いた油圧駆動式のリニアアクチュエータでは、当該油圧シリンダに圧油を供給するための回路に設置されたバルブを開く量で荷物(リフト機構)の昇降速度をコントロールし、当該バルブを完全に閉じることで荷物を停止させていた。一方、電動リニアアクチュエータでは、電動モータのトルクで荷物の昇降速度をコントロールし、ナット部材の移動を抑制するブレーキのオン/オフで荷物を停止させている。そのため、電動モータの制御とブレーキの制御という2つの制御が必要となる。この2つの制御のタイミングがわずかにずれると、荷物が昇降されているときにブレーキが作用し急停止するなどの状態が発生し、リフト機構に衝撃荷重が作用してしまうおそれがある。
【0005】
この点を鑑み、停止状態の荷物を上昇させるとき及び上昇中の荷物を停止させるときの制御を電動モータの制御のみで実施しようとした技術がある(特許文献1,2参照)。特許文献1の技術では、電動モータの回転軸にワンウェイクラッチと呼ばれる一方向のみの回転を許容する機構を挿入し、荷物を上昇させる方向の回転は許容するが荷物を降下させる方向の回転は許容しない(回転させない)構成としている。このため、電動モータのトルクで荷物を上昇させた後に当該トルクを0にすると、荷物は自重で降下しようとするが、ワンウェイクラッチが機能するので荷物を停止できる。また、当該技術は通電時にワンウェイクラッチを解除する機構(保持器制御ソレノイド)を備えているため、荷物を降下させる際には当該解除機構に通電してワンウェイクラッチを解除すれば良い。
【0006】
特許文献2は、特許文献1と同様に回転軸にワンウェイクラッチを挿入した構成である。特許文献1と異なるのは、ワンウェイクラッチ外輪が固定されていない点であり、そのかわりにワンウェイクラッチ外輪にはブレーキディスクが取付けられている。このブレーキディスクは、ブレーキシュがばねによって常に押し付けられている。このため、ワンウェイクラッチが回転を許容する方向にしか回転することができない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010-112409号公報
【特許文献2】特開平2-21040号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記特許文献1では、荷物の降下中にワンウェイクラッチの解除機構への電源供給が断線やバッテリー切れ等で遮断されると、ワンウェイクラッチが動作してしまうので、ねじ軸に動力を伝達する軸の回転が急激に阻止される。この急停止により、ワンウェイクラッチの各部材に過大な接触応力が働くおそれがある。
【0009】
一方、上記特許文献2では、ワンウェイクラッチが作用する方向には、常にブレーキディスクによりブレーキ力が作用するため、荷物を降下させることができない。なお、ブレーキディスクのブレーキトルク以上のトルクを電動モータによって与えれば荷物を降下させることができるが、この場合には、回生エネルギを取得することができないだけでなく、必要以上のトルクを発生させなければならないため、エネルギ消費を低減する観点からは好ましくない。
【0010】
本発明の目的は、回生エネルギを有効的に取得できる機構であることを前提とし、リフト機構が降下時に急停止したときに発生する応力を低減できるリフト機構の荷重保持機構を提供することにある。
【課題を解決するための手段】
【0011】
本発明は、上記目的を達成するために、ねじ軸に螺合されたナット部材を昇降するリフト機構の荷重保持機構において、前記リフト機構の駆動源からの動力によって回転駆動される第1回転体と、前記第1回転体と同心状に配置された第2回転体と、前記第1回転体と前記第2回転体の間に設けられ、前記第1部材と前記第2部材の一方向の相対回転は許可するが他方向の相対回転は禁止するワンウェイクラッチ機構と、前記第2回転体を摩擦力で保持するブレーキとを備えるものとする。
【発明の効果】
【0012】
本発明によれば、リフト機構が降下時に急停止したときに発生する応力を低減できる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態におけるリフト機構の全体構成の側断面図。
【図2】本発明の実施の形態に係る荷重保持機構100の詳細図。
【図3】図2中のA−A断面図。
【図4】本発明の他の実施の形態に係る荷重保持機構100Aの断面図。
【図5】本発明の実施の形態に係るリフト機構を備えたフォークリフトの概略構成図。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面を用いて説明する。
図1は本発明の実施の形態におけるリフト機構の全体構成の側断面図である。この図に示すリフト機構は、電動リニアアクチュエータを利用して荷物等の対象物の昇降を行うものであり、ねじ軸4と、ねじ軸4に螺合されたナット部材9と、ねじ軸4を回転駆動するための原動機としてのモータ(電動機)1と、主にナット部材9に作用する荷重を保持するための荷重保持機構100と、リフト機構の操作装置(図示せず)を介して入力されるオペレータの操作に基づいて主にモータ1及び荷重保持機構100を制御するための制御装置200を備えている。
【0015】
モータ1はリフト機構の駆動源であり、モータ1の出力軸1aの一方(図1中の上側)には、モータ1の回転を停止させ、ナット部材9を停止させるためのブレーキ11が取り付けられている。
【0016】
また、モータ1の出力軸1aの他方(図1中の下側)には荷重保持機構100と小歯車2が取り付けられている。小歯車2には大歯車3が噛み合わされている。モータ1による動力の回転は、小歯車2から大歯車3に回転が伝達される際に互いの歯数に応じて適宜減速される。すなわち、入力側の歯車が大きいと増速し、小さいと減速される。本実施の形態では、出力側の歯車3に対して入力側の歯車2が小さいため回転は減速される。
【0017】
大歯車3にはねじ軸4が固定されている。小歯車2はラジアル軸受5とモータ1の軸受によって回転可能に支持されている。大歯車3とねじ軸4が一体化されたものは、ラジアル軸受6により回転可能に支持されており、ねじ軸4の軸方向に発生する推力による反力はスラスト軸受7によって支持されている。上記の各構成によって、モータ1からねじ軸4への回転駆動力の伝達経路が構成されている。なお、上記の各軸受などは、固定部品である下部ハウジング8と上記回転駆動力の伝達経路の各回転部品との間に組み込まれている。
【0018】
ねじ軸4と、ねじ軸4にねじ対偶で装着されたナット部材9とは、ねじ機構を構成しており、両者4,9は相対的に回転することでねじ軸4の軸方向に相対的に移動する。本実施の形態におけるナット部材9は、ねじ軸4とナット部材9が転がり接触で接触しており、ねじ軸4とナット部材9の間の摩擦抵抗はすべり接触の場合に比べて大幅に小さくなっている。この転がり接触を行うねじ機構の例としては、特許文献1に示されているボールねじ機構等が挙げられる。
【0019】
ナット部材9の上面には直動出力部材10が固定されている。直動出力部材10の内部は中空になっており、これによりねじ軸4との干渉を回避している。また、本実施の形態における直動出力部材10は、図1中に一点鎖線で示した他のリニアアクチュエータの直動出力部材10Aと連結部材12を介して連結されている。ナット部材9は、連結部材12及び直動出力部材10Aによってねじ軸4の回転中心回りに回転不能に拘束されている。これによりねじ軸4を回転駆動させるとナット部材9が円筒状の上部ハウジング14内を上下方向に移動する。なお、直動出力部材10およびナット部材9の中心軸回りの回転を阻止して軸方向への移動を許容する他の構成としては、上部ハウジング14の内周面14aにキー溝を設け、当該キー溝に対応するすべりキーを直動出力部材10又はナット部材9に設ける構成等がある。
【0020】
下部ハウジング8の上には中央ハウジング13が固定されている。中央ハウジング13の上部には上部ハウジング14が固定されている。上部ハウジング14は、その内周面14aによってナット部材9およびねじ軸4が傾斜しないように支持する機能を果たしている。また、直動出力部10が上部ハウジング14を貫通する部分にはシール(図示せず)が設けられており、当該シールによってねじ軸4とナット部材9によるねじ対偶部にゴミ等の異物が侵入するのを防止している。なお、本実施の形態における荷重保持機構100は、中央ハウジング13とモータ1の間に組み込まれている。
【0021】
図2は、図1に示した荷重保持機構100の詳細図であり、図3中のB−B断面図である。また、図3は図2中のA−A断面図である。なお、先の図と同じ部分には同じ符号を付して説明は省略する(後の図も同様とする)。
【0022】
荷重保持機構100は、円筒部材(第1回転体)25と、外輪(第2回転体)24と、ワンウェイクラッチ機構23と、電磁ブレーキ15を備えている。
【0023】
円筒部材25は、モータ1からねじ軸4への回転駆動力の伝達経路に設置された部材であり、モータ1からの動力によって回転駆動される。本実施の形態における円筒部材25は、モータ1の出力軸1aの回転軸心と同心状に形成された円筒状の部材であり、出力軸1aの外周面上に固定されている。これにより円筒部材25は出力軸1aとともに一体に回転する。
【0024】
外輪24は、円筒部材25の外周側に出力軸1aの回転軸心(すなわち、円筒部材25の回転軸心)と同心状に配置された中空円筒状の部材である。外輪24の底面における中心部には孔が設けられており、当該孔には出力軸1aが挿入されている。また、当該孔の周囲には軸受21が設けられており、外輪24は軸受21を介して出力軸1aに対して回転可能に支持されている。また、外輪24の底面にはブレーキディスク18が連結されている。ブレーキディスク18にはモータ1の出力軸1aが挿入されており、ブレーキディスク18は外輪24と同様に軸受け21を介して出力軸1aに対して回転可能に支持されている。
【0025】
電磁ブレーキ15は、ブレーキ本体31と、ブレーキディスク18を挟んで出力軸1aの軸方向に配置された2つのブレーキパッド16,17と、ばね19と、コイル20を備えており、ブレーキディスク18とブレーキパッド16,17の間に発生する摩擦力で外輪24を保持する無励磁作動型の制動装置である。
【0026】
ブレーキ本体31は、中央ハウジング13(図1参照)に固定されている。ブレーキ本体31には、出力軸1aの軸方向と略平行に保持されたピン22が取り付けられている。ピン22は、2つのブレーキパッド16,17に挿入されている。ブレーキ本体31側のブレーキパッド17は、磁性体で形成されており、出力軸1aの軸方向に上下動可能にピン22によって支持されている。一方、外輪24側のブレーキパッド16は出力軸1aの軸方向に上下動不可能にピン22に固定されている。
【0027】
ばね19は、ブレーキパッド17をブレーキパッド18側(図2中の上方向)に付勢するためのもので、ブレーキ本体31の上面に設けた凹部内に撓んだ状態で収納されている。電磁ブレーキ15のブレーキトルクは主にばね19によって規定される。図2では簡略してばね19を1つ表記したが、電磁ブレーキ15のブレーキトルクが所望の値になるように複数のばね19が適宜設置されている。
【0028】
なお、通常のリフト動作時にブレーキディスク18が滑らない範囲でワンウェイクラッチ機構23に作用するトルクを最小とする観点からは、電磁ブレーキ15のブレーキトルクは、図1に示したリフト機構(ナット部材9)に最大積載荷重が作用するときに外輪24を静的に保持するために必要なトルクと同等とすることが好ましい。さらに、電磁ブレーキ15のブレーキトルクは、最大でも最大積載荷重が作用するときに外輪24を静的に保持するために必要なトルクの数倍程度になるように設定することが好ましい。これは、ブレーキトルクを大きくしすぎると、ブレーキディスク18が滑り始めるトルクが必要以上に大きくなってしまい、結果的にワンウェイクラッチ機構23の各部材に作用する接触力が大きくなってしまうからである。また、ブレーキトルクを大きくしすぎると、ワンウェイクラッチ23のサイズが大きくなってしまうので、この観点からもブレーキトルクを大きくしすぎることは望ましくない。
【0029】
コイル20は、ブレーキ本体31内に収納されており、通電時には電磁力を発生してブレーキパッド17を吸着する。コイル20に通電して電磁力を発生させると、ばね19の付勢力に抗してブレーキパッド17がブレーキ本体31側(コイル20側)に吸着され、ブレーキパッド17がブレーキディスク18から離間してブレーキが解除される。一方、非通電時には電磁力が発生しないので、ばね19の付勢力によってブレーキパッド17がブレーキディスク18に押し付けられ、ブレーキディスク18とブレーキパッド16,17の間に発生する摩擦力によりブレーキが作動した状態となる。これにより外輪24は電磁ブレーキ15によって保持される。すなわち、本実施の形態における電磁ブレーキ15は、通電時にブレーキ解除状態(外輪24がブレーキ本体31に対して相対回転可能な状態)となり、非通電時(電源供給遮断時など)にブレーキ作動状態(外輪24がブレーキ本体31に対して相対回転不可能な状態)となる無励磁作動型ブレーキとして機能する。
【0030】
ワンウェイクラッチ機構23は、円筒部材25と外輪24の一方向(図3中の左回り方向(以下、正転方向と称することがある))の相対回転は許容するが、他方向(図3中の右回り方向(以下、逆転方向と称することがある))の相対回転を禁止するための機構であり、円筒部材25と外輪24の間に設けられている。図3に示す例では、ワンウェイクラッチ機構として、溝部27と、ローラ(転動体)28と、ばね(付勢手段)26を備えている。また、ここでいう「正転方向」とは、リフト機構(ナット部材9)の上昇時にモータ1の出力軸1aが回転する方向とし、「逆転方向」とは、リフト機構の下降時に出力軸1aが回転する方向とする。
【0031】
溝部27は、出力軸1aの半径方向(円筒部材25又は外輪24の半径方向)における幅が逆転方向に向かって縮小する溝であり、本実施の形態では互いに対向する円筒部材25の外周面と外輪24の内周面のうち外輪24の内周面に設けられている。この溝部27によって、外輪24の内周面と円筒部材25の外周面との間には逆転方向に向かって幅が縮小する間隙が形成される。また、本実施の形態における溝27は、図3に示すように外輪25の周方向に所定の間隔(120度の角度ピッチ)を介して3つ設けられている。
【0032】
ローラ28は、各溝部27に収納された転動体であり、本実施の形態では円筒状に形成されている。ばね26は、溝部27に収納された付勢手段であり、逆転方向に向かってローラ28を付勢している。これによりローラ28は、円筒部材25の外周面と外輪24の内周面(溝部27)の双方に接触した状態で保持される。
【0033】
ここでワンウェイクラッチ機構23の動作について説明する。ワンウェイクラッチ機構23を動作させる場合には、コイル20を非通電状態として電磁ブレーキ15によるブレーキ作動させる必要がある。一方、ワンウェイクラッチ機構23の動作を解除する場合には、コイル20を通電状態としてブレーキを解除する必要がある。
【0034】
まず、電磁ブレーキ15のコイル20が非通電状態の場合には、ブレーキディスク18がブレーキパッド16,17と接触することでブレーキが作動して、外輪24がブレーキ本体31(中央ハウジング13)に対して相対回転不可能な状態となる。このとき円筒部材25が逆転方向に回転すると、円筒部材25の回転に伴ってローラ28が溝部27の幅が縮小する方向に転動し、円筒部材25と外輪24の隙間にローラ28が食い込む。これにより円筒部材25の逆転方向へのそれ以上の回転が阻止される。一方、円筒部材25が正転方向に回転すると、円筒部材25の回転に伴ってローラ28が溝部27の幅が拡大する方向に転動するので、円筒部材25と外輪24の隙間にローラ28が食い込むことは無い。これにより円筒部材25は正転方向に回転可能となる。
【0035】
一方、コイル20が通電状態の場合には、ブレーキが解除され、外輪24がブレーキ本体31に対して相対回転可能な状態となる。この場合には、正転方向及び逆転方向のいずれの方向に回転させても円筒部材24は回転可能である。これは、円筒部材25を逆転方向に回転させてローラ28を円筒部材25と外輪24の隙間に食い込ませても、外輪24自体が回転可能なため、円筒部材25は外輪24と一体となって回転するからである。このように、本実施の形態に係るリフト機構では、電磁ブレーキ15を解除することで、ワンウェイクラッチ機構23の作動を解除することができる。
【0036】
図1に戻り、制御装置200は、上記のようにコイル20への通電を制御することで行われる電磁ブレーキ15の制御処理と、モータ1のトルク制御処理とを荷物の昇降に応じて実行するものであり、電磁ブレーキ15及びモータ1にそれぞれ制御信号を出力している。なお、制御装置200は、ハードウェア構成として、各種の制御プログラムを実行するための演算処理装置(例えば、CPU)、当該制御プログラムをはじめ各種データを記憶するための記憶装置(例えば、ROM、RAM)等を備えている(いずれも図示せず)。
【0037】
上記のように構成されるリフト機構の動作について、リフト(ナット部材9)の上昇及び下降のそれぞれの場合について説明する。
【0038】
まず、リフト機構の上昇時及び停止時には、制御装置200はコイル20を非通電状態にする。これにより外輪24の回転は電磁ブレーキ15により拘束されるので、ワンウェイクラッチ機構23が動作可能な状態となる。この場合、本実施の形態に係るワンウェイクラッチ機構23は、既述のようにリフトの上昇方向(正転方向)への円筒部材25の回転を許容するため、電磁ブレーキ15が作動状態のままでもモータ1のトルクを上昇させることでリフトの上昇が可能である。
【0039】
リフト機構の上昇を停止するときには、制御装置200はモータ1のトルクを0にする。このようにモータ1のトルクを0にすると、荷物の自重によりリフトは下降しようとする。しかし、ワンウェイクラッチ機構23の機能により下降方向(逆転方向)への円筒部材24の回転は許容されないため、荷物は下降することなく停止する。したがって、上昇している荷物を停止する場合には、電磁ブレーキ15を動作させつつモータ1のトルクを0にすることで可能である。
【0040】
一方、リフト機構を降下する場合にはワンウェイクラッチ機構23を解除する必要がある。そのため、制御装置200は、コイル20を通電状態にし、電磁ブレーキ15によるブレーキを解除する。これにより外輪24がブレーキ本体31に対して相対回転可能になり、リフトが下降可能な状態になる。このような状態になったら、制御装置200は、モータ1のトルクを制御することによりリフトを適切な速度で下降させる。このとき、電磁ブレーキ15による摩擦トルクは発生しないため、モータ1による回生エネルギの取得が可能になる。
【0041】
リフト機構の降下を停止する場合には、制御装置200は、まず、モータ1のトルクを制御してリフト機構の降下速度を0に保持し、その後にコイル20を非通電状態として電磁ブレーキ15を作動させる。これにより電磁ブレーキ15がリフトの停止前に作動することが回避できるので、荷重保持機構100の各構成要素に衝撃荷重を与えることなくリフトの降下を停止することができる。
【0042】
なお、リフト機構の降下を停止する場合には、上記のようにリフト機構の降下速度を0に保持することに代えて、制御装置200によって、リフト機構の降下が停止する直前に、リフト機構が上昇するようにモータ1のトルクを制御し、これによりリフト機構の移動方向が下降から上昇に変化した直後(すなわち、上昇し始めた直後)にコイル20を非通電状態として電磁ブレーキ15を作動させることが好ましい。そして、このように電磁ブレーキ15を作動させた直後に、制御装置200によってモータ1のトルクを減少させると良い。この制御では、先に説明した場合のようにモータ1の制御によりリフト機構の下降速度をほぼ0に保持する制御を行わなくても、ナット部材9が下降を始めようとする時にワンウェイクラッチ機構23が作動するため、速度がほぼ0に近い状態でリフト機構を停止することができる。つまり、ワンウェイクラッチ機構23に過大な接触応力が作用することなく停止することが可能となる。
【0043】
上記のように構成されたリフト機構では、予期せぬトラブル(例えば、断線やバッテリ切れ等)によってコイル20への通電が突然遮断された場合には、無励磁作動型の電磁ブレーキ15が作動してワンウェイクラッチ機構23が作動するので荷物の落下を防止することができる。特に本実施の形態に係る電磁ブレーキ15は、ブレーキディスク18とブレーキパッド16,17の間に発生する摩擦力によって外輪24の回転を拘束してリフト機構を急停止するので、当該摩擦力以上のトルクが作用した場合にはブレーキディスク18を滑らせることができる。このため、ワンウェイクラッチ機構23には電磁ブレーキ15のブレーキトルク以上のトルクが作用することはなく、ワンウェイクラッチ機構23に過大な接触荷重が作用することを防止できるので、ワンウェイクラッチ機構23の破損が防止できる。また、これによりワンウェイクラッチ機構23を小型化することができる。
【0044】
また、上記の構成により、電磁ブレーキ15への通電の有無でワンウェイクラッチ機構23の作動及び解除を切り替えることができるため、非通電時はブレーキ15が作動しワンウェイクラッチ状態、通電時はブレーキ15が解除されどちらの回転も許容された状態となり、片方向のみ回転が許容された状態と両方向の回転が許容された状態を切り替えることが可能となる。これにより、リフトを上昇させる時はワンウェイクラッチ状態とすることでモータトルクの制御のみでリフト動作を行えるようにし、下降させる時には両方の回転が許容された状態とすることで回生エネルギを有効取得できるようになる。
【0045】
したがって、本実施の形態によれば、通常時にはリフト機構の降下時に回生エネルギが取得できるとともに、降下時にリフト機構が急停止する非常時にはその際に発生する応力を低減することができる。
【0046】
なお、上記の説明では、電磁ブレーキ15のブレーキトルクは、リフト機構に最大積載荷重が作用するときに外輪24を静的に保持するために必要なトルクを基準とすると、当該基準トルク以上とし、最大でも数倍程度に設定することが好ましいとした。しかし、さらに好ましくは、電磁ブレーキ15のブレーキトルクは、当該基準トルクの1.5〜2.0倍とすると良い。このように電磁ブレーキ15のブレーキトルクを設定すると、例えば、外部から加速度0.2G〜0.6G程度の振動がリフト機構に作用し、さらに電磁ブレーキ15のブレーキトルクに2割程度のばらつきがあったとしても、通常動作時にブレーキディスク18は滑らないが過大トルクが作用すると滑るという動作を実現できる。これは、電磁ブレーキ15のブレーキトルクに2割程度のばらつきがあった場合でも、ブレーキトルクは上記基準に対して最低でも1.2倍〜1.6倍のトルクを有することとなるため、加速度0.2G〜0.6Gの振動が作用してもブレーキディスクが滑ることはないからである。
【0047】
また、上記の実施の形態では、外輪24の内周面上に溝部27を設けてワンウェイクラッチ機構23を構成したが、これに代替して円筒部材25の外周面上に溝部を設けて当該機構を構成しても良い。図4は、本発明の他の実施の形態に係る荷重保持機構100Aの断面図であり、図2中のA−A断面に相当する面で荷重保持機構100Aを切断したときのものである。この図に示す荷重保持機構100Aは、円筒部材25Aと、外輪24Aを備えている。円筒部材25Aには、出力軸1aの半径方向における幅が逆転方向に向かって縮小する溝であり、円筒部材25Aの外周面に設けられた溝部27Aが設けられている。このように円筒部材25A側に溝部27Aを形成しても先に説明した実施の形態と同様にワンウェイクラッチ機構を構成することができるので、同様の効果を奏することができる。
【0048】
さらに、上記の各実施の形態では、モータ1によって円筒部材25Aを回転駆動し、外輪24Aを電磁ブレーキ15で保持する場合について説明したが、モータ1で外輪24Aを回転駆動し、円筒部材25Aを電磁ブレーキ15で保持するようにリフト機構を構成しても同様の効果を奏することができる。
【0049】
次に上記の実施の形態に係るリフト機構の適応例について説明する。図5は本発明の実施の形態に係るリフト機構を備えたフォークリフト(作業機械)の概略構成図である。この図において、フォークリフトの本体300の前方には一対のマスト301が取り付けられており、マスト301には荷物昇降部302が付設されている。荷物昇降部302は、リフトブラケット(図示せず)を介してマスト301の内枠に昇降自在に取り付けられた保持枠303と、保持枠303に取り付けられた一対のフォーク304を備えている。上記の実施の形態で説明したリフト機構305は、ねじ機構によって荷物昇降部302を昇降させるために用いられており、例えばマスト301の運転席側に設置することができる。
【0050】
なお、ここではリフト機構305の適用例としてフォークリフトを例に挙げたが、ねじ軸の回転によって昇降されるナット部材を有する電動リニアアクチュエータを備えるものであれば、本発明に係る荷重保持機構及びリフト機構はフォークリフトに限らず種々の作業機械に適用可能である。
【符号の説明】
【0051】
1…モータ、1a…モータ出力軸、2…小歯車、3…大歯車、4…ねじ軸、5…ラジアル軸受、6…ラジアル軸受、7…スラスト軸受、8…下部ハウジング、9…ナット部材、10…直動出力部、11…ブレーキ、12…連結部材、13…中央ハウジング、14…上部ハウジング、14a…内周面、15…電磁ブレーキ、16…ブレーキパッド、17…ブレーキパッド、18…ブレーキディスク、19…ばね、20…コイル、21…軸受、22…ピン、23…ワンウェイクラッチ機構、24…外輪(第2回転体)、24A…外輪(第2回転体)、25…円筒部材(第1回転体)、25A…円筒部材(第1回転体)26…付勢ばね、27…溝部、27A…溝部28…ローラ(転動体)、100…荷重保持機構、100A…荷重保持機構、200…制御装置、300…フォークリフト本体、301…マスト、302…荷物昇降部、303…保持枠、304…フォーク、305…リフト機構
【特許請求の範囲】
【請求項1】
ねじ軸に螺合されたナット部材を昇降するリフト機構の荷重保持機構において、
前記リフト機構の駆動源からの動力によって回転駆動される第1回転体と、
前記第1回転体と同心状に配置された第2回転体と、
前記第1回転体と前記第2回転体の間に設けられ、前記第1回転体と前記第2回転体の一方向の相対回転は許可するが他方向の相対回転は禁止するワンウェイクラッチ機構と、
前記第2回転体を摩擦力で保持するブレーキとを備えることを特徴とするリフト機構の荷重保持機構。
【請求項2】
請求項1に記載のリフト機構の荷重保持機構において、
前記ブレーキのブレーキトルクは、前記リフト機構に最大積載荷重が作用するときに前記第2回転体を静的に保持するために必要なトルク以上に設定されていることを特徴とするリフト機構の荷重保持機構
【請求項3】
請求項1又は2に記載のリフト機構の荷重保持機構において、
前記リフト機構の上昇時には前記ブレーキを作動させ、前記リフト機構の降下時には前記ブレーキを解除する制御装置をさらに備えることを特徴とするリフト機構の荷重保持機構。
【請求項4】
請求項3に記載のリフト機構の荷重保持機構において、
前記制御装置は、前記リフト機構の降下を停止するとき、前記駆動源のトルクを制御して前記リフト機構の降下速度をゼロにした後に前記ブレーキを作動させることを特徴とするリフト機構の荷重保持機構。
【請求項5】
請求項4に記載のリフト機構の荷重保持機構において、
前記制御装置は、前記リフト機構の降下を停止するとき、
前記リフト機構の降下が停止する直前に、前記リフト機構が上昇するように前記駆動源のトルクを制御し、
前記リフト機構の移動方向が下降から上昇に変化した直後に前記ブレーキを作動させることを特徴とするリフト機構の荷重保持機構。
【請求項6】
請求項2に記載のリフト機構の荷重保持機構において、
前記ブレーキのブレーキトルクは、前記リフト機構に最大積載荷重が作用するときに前記第2回転体を静的に保持するために必要なトルクの1.5〜2.0倍であることを特徴とするリフト機構の荷重保持機構。
【請求項7】
請求項1から6のいずれかに記載のリフト機構の荷重保持機構において、
前記ブレーキは、非通電時に前記第2回転体を保持する電磁ブレーキ無励磁作動型の電磁ブレーキであることを特徴とするリフト機構の荷重保持機構
【請求項8】
請求項1から7のいずれかに記載のリフト機構の荷重保持機構において、
前記ワンウェイクラッチ機構は、
前記第1回転体及び前記第2回転体のいずれか一方に設けられた溝部と、
前記溝部に収納された転動体と、
前記転動体を付勢する付勢手段とを有し、
前記第1回転体又は前記第2回転体の半径方向における前記溝部の幅は、前記他方向に向かって縮小し、
前記付勢手段は、前記他方向に向かって前記転動体を付勢することを特徴とするリフト機構の荷重保持機構。
【請求項9】
ねじ軸と、
当該ねじ軸に螺合され、前記ねじ軸が回転されることで昇降されるナット部材と、
前記ねじ軸を回転駆動するための原動機と、
前記原動機からの動力によって回転駆動される第1回転体と、
前記第1回転体と同心状に配置された第2回転体と、
前記第1回転体と前記第2回転体の間に設けられ、前記第1部材と前記第2部材の一方向の相対回転は許可するが他方向の相対回転は禁止するワンウェイクラッチ機構と、
前記第2回転体を摩擦力で保持するブレーキとを備えることを特徴とするリフト機構。
【請求項10】
請求項9に記載のリフト機構を備えることを特徴とする作業機械。
【請求項1】
ねじ軸に螺合されたナット部材を昇降するリフト機構の荷重保持機構において、
前記リフト機構の駆動源からの動力によって回転駆動される第1回転体と、
前記第1回転体と同心状に配置された第2回転体と、
前記第1回転体と前記第2回転体の間に設けられ、前記第1回転体と前記第2回転体の一方向の相対回転は許可するが他方向の相対回転は禁止するワンウェイクラッチ機構と、
前記第2回転体を摩擦力で保持するブレーキとを備えることを特徴とするリフト機構の荷重保持機構。
【請求項2】
請求項1に記載のリフト機構の荷重保持機構において、
前記ブレーキのブレーキトルクは、前記リフト機構に最大積載荷重が作用するときに前記第2回転体を静的に保持するために必要なトルク以上に設定されていることを特徴とするリフト機構の荷重保持機構
【請求項3】
請求項1又は2に記載のリフト機構の荷重保持機構において、
前記リフト機構の上昇時には前記ブレーキを作動させ、前記リフト機構の降下時には前記ブレーキを解除する制御装置をさらに備えることを特徴とするリフト機構の荷重保持機構。
【請求項4】
請求項3に記載のリフト機構の荷重保持機構において、
前記制御装置は、前記リフト機構の降下を停止するとき、前記駆動源のトルクを制御して前記リフト機構の降下速度をゼロにした後に前記ブレーキを作動させることを特徴とするリフト機構の荷重保持機構。
【請求項5】
請求項4に記載のリフト機構の荷重保持機構において、
前記制御装置は、前記リフト機構の降下を停止するとき、
前記リフト機構の降下が停止する直前に、前記リフト機構が上昇するように前記駆動源のトルクを制御し、
前記リフト機構の移動方向が下降から上昇に変化した直後に前記ブレーキを作動させることを特徴とするリフト機構の荷重保持機構。
【請求項6】
請求項2に記載のリフト機構の荷重保持機構において、
前記ブレーキのブレーキトルクは、前記リフト機構に最大積載荷重が作用するときに前記第2回転体を静的に保持するために必要なトルクの1.5〜2.0倍であることを特徴とするリフト機構の荷重保持機構。
【請求項7】
請求項1から6のいずれかに記載のリフト機構の荷重保持機構において、
前記ブレーキは、非通電時に前記第2回転体を保持する電磁ブレーキ無励磁作動型の電磁ブレーキであることを特徴とするリフト機構の荷重保持機構
【請求項8】
請求項1から7のいずれかに記載のリフト機構の荷重保持機構において、
前記ワンウェイクラッチ機構は、
前記第1回転体及び前記第2回転体のいずれか一方に設けられた溝部と、
前記溝部に収納された転動体と、
前記転動体を付勢する付勢手段とを有し、
前記第1回転体又は前記第2回転体の半径方向における前記溝部の幅は、前記他方向に向かって縮小し、
前記付勢手段は、前記他方向に向かって前記転動体を付勢することを特徴とするリフト機構の荷重保持機構。
【請求項9】
ねじ軸と、
当該ねじ軸に螺合され、前記ねじ軸が回転されることで昇降されるナット部材と、
前記ねじ軸を回転駆動するための原動機と、
前記原動機からの動力によって回転駆動される第1回転体と、
前記第1回転体と同心状に配置された第2回転体と、
前記第1回転体と前記第2回転体の間に設けられ、前記第1部材と前記第2部材の一方向の相対回転は許可するが他方向の相対回転は禁止するワンウェイクラッチ機構と、
前記第2回転体を摩擦力で保持するブレーキとを備えることを特徴とするリフト機構。
【請求項10】
請求項9に記載のリフト機構を備えることを特徴とする作業機械。
【図1】



【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−57328(P2013−57328A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−194441(P2011−194441)
【出願日】平成23年9月6日(2011.9.6)
【出願人】(000005522)日立建機株式会社 (2,611)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月6日(2011.9.6)
【出願人】(000005522)日立建機株式会社 (2,611)
【Fターム(参考)】
[ Back to top ]