
リモートセンシングにおける検量線の作成方法

【課題】照度均一状態だけでなく雲ムラ状態の画像データにも対応した検量線を作成可能とすることを提供する。
【解決手段】圃場内の作物情報を算出するリモートセンシングにおいて、圃場内の複数の区域に生育している作物からの反射光を、受光手段による撮影により前記区域毎に測定する工程と、前記圃場内の作物の作物情報を、前記区域毎に化学分析等により求める工程と、前記撮影により得た反射光の情報を説明変数、前記作物情報を目的変数とした、あらかじめ定めた重回帰式の重回帰係数を算出する工程とを含み、前記測定は、前記圃場が照度均一状態及び雲ムラ状態である両方の状態において行い、それぞれの状態での前記反射光の情報を前記説明変数に用いて検量線を作成する、という技術的手段を講じた。
【解決手段】圃場内の作物情報を算出するリモートセンシングにおいて、圃場内の複数の区域に生育している作物からの反射光を、受光手段による撮影により前記区域毎に測定する工程と、前記圃場内の作物の作物情報を、前記区域毎に化学分析等により求める工程と、前記撮影により得た反射光の情報を説明変数、前記作物情報を目的変数とした、あらかじめ定めた重回帰式の重回帰係数を算出する工程とを含み、前記測定は、前記圃場が照度均一状態及び雲ムラ状態である両方の状態において行い、それぞれの状態での前記反射光の情報を前記説明変数に用いて検量線を作成する、という技術的手段を講じた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、リモートセンシングにおいて、撮影対象の圃場に雲の影がない状態(晴天)又は圃場全体に雲の影がある状態(曇天)の、これら照度が均一と考えられる二つの状態(以下、「照度均一状態」という)だけでなく、圃場に雲の影が部分的に混在する状態(以下、「雲ムラ状態」という)でも測定可能な検量線の作成方法に関する。
【背景技術】
【0002】
従来、特許文献1に記載されているように、リモートセンシングによる圃場の撮影は、晴天時又は曇天時の照度均一状態で行われている。
【0003】
また、リモートセンシングにおいて作物情報の演算に使用する検量線は、特許文献2に記載されているように、測定対象の作物の光特性や太陽光強度等の撮影条件の違いによる影響の少ない検量線を作成するために、様々な撮影条件を説明変数に追加して検量線を作成することが考えられている。
【0004】
しかし、特許文献2に記載されている検量線の作成方法は、照度均一状態での撮影データを使用していると思われるので、前記作成方法で作成した検量線を使用して雲ムラ状態での撮影データを演算すると、測定精度が低下するおそれがある。このため、雲ムラ状態の時に撮影を行うことは望ましいことではなく、よって、撮影時間が制約を受けてしまう。したがって、雲ムラ状態は、撮影を効率よく計画的に行う場合の阻害要因となっている。
【0005】
ところで、特許文献3には、雲ムラ状態の画像データを、変換して使用することが記載されている。特許文献3によれば、湖等の水域の汚濁状態を監視する際に、予め基準となる画像データからヒストグラムを作成しておき、該ヒストグラムを使用して雲ムラ状態の画像データを変換している。
【0006】
この方法では、基準となる画像データと雲ムラ状態の画像データとが同一の撮影範囲で撮影された画像である必要があると考えられる。特許文献3のように、測定対象の変化が比較的少ない湖等の水域の定点観測においては問題とならないが、例えば圃場においては、測定対象である圃場内作物が日々生長するため、圃場内作物の生育段階毎に基準となる画像データを求めておく必要があると思われる。したがって、圃場に係るリモートセンシングにおいては効率的な方法とはいえない。
【0007】
このため、照度均一状態だけでなく雲ムラ状態で撮影した画像データであっても特別な処理をすることなく、照度均一状態で撮影した画像データと同様に使用可能とすることが望まれている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2003−009694号公報
【特許文献2】特開2008−175537号公報
【特許文献3】特開平3−154851号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は上記問題点にかんがみて、照度均一状態だけでなく雲ムラ状態で撮影した画像データでも特別な処理をすることなく、照度均一状態で撮影した画像データと同様に使用可能とすることを目的とし、照度均一状態だけでなく雲ムラ状態の画像データにも対応した検量線を作成可能とすることを技術的課題とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため本発明は、圃場内の作物情報を算出するリモートセンシングにおいて、圃場内の複数の区域に生育している作物からの反射光を、受光手段による撮影により前記区域毎に測定する工程と、前記圃場内の作物の作物情報を、前記区域毎に化学分析等により求める工程と、前記撮影により得た反射光の情報を説明変数、前記作物情報を目的変数とした、あらかじめ定めた重回帰式の重回帰係数を算出する工程とを含み、前記測定は、前記圃場が照度均一状態及び雲ムラ状態である両方の状態において行い、それぞれの状態での前記反射光の情報を前記説明変数に用いて検量線を作成する、という技術的手段を講じた。
【0011】
また、前記検量線の作成方法において、照度均一状態及び雲ムラ状態をダミー変数として用いる、という技術的手段を講じた。
【0012】
さらに、前記照度均一状態が、晴天時又は/及び曇天時であって、前記雲ムラ状態が、雲の影が撮影する圃場内に部分的に混在する状態であることを特徴とする。
【0013】
その上、測定精度を向上させるために、請求項1乃至3に記載の作成方法により作成した検量線にて作物の作物情報をリモートセンシングにおいて、圃場内に生育している作物からの反射光を、カメラによる撮影により測定する工程と、前記検量線の定数項又は/及びダミー変数の係数を0とした仮検量線に、前記撮影により得た反射光の情報を適用して、前記圃場内の一定面積の区域に生育している作物の第1の作物情報を演算する工程と、作物の葉身に光を直接照射する方法によって前記区域に生育している作物の第2の作物情報を測定する工程と、前記第1の作物情報と前記第2の作物情報との差を算出する工程とを含み、前記差を前記仮検量線の定数項の値としたものを検量線とする、という技術的手段を講じた。
【0014】
そして、本発明の請求項1乃至4に記載の検量線の作成方法で作成した検量線を使用してリモートセンシングによる作物の測定を行う、という技術的手段を講じた。
【発明の効果】
【0015】
本発明によれば、検量線作成時の多変量解析において照度均一状態だけでなく雲ムラ状態の画像データを用いるので、雲ムラ状態を考慮した検量線が作成可能である。このため、従来、撮影を行えなかった雲ムラ状態でも圃場の撮影が行えるようになり、作業を計画的に効率良く実施できるようになった。
【0016】
また、本発明では、太陽光等の影響を受けないように作物を直接測定した測定値を用いて検量線のバイアス分(定数項)に該当する値を求めるので、測定精度を向上させることが可能となった。
【図面の簡単な説明】
【0017】
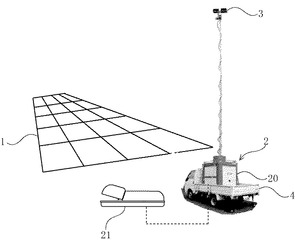
【図1】撮影状態を示した説明図である。
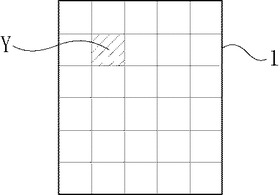
【図2】撮影した圃場の画像を、一定面積の複数の区域に分けた状態を示す図である。
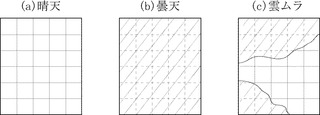
【図3】「晴天」「曇天」及び「雲ムラ」の3種類の状態を示した図である。
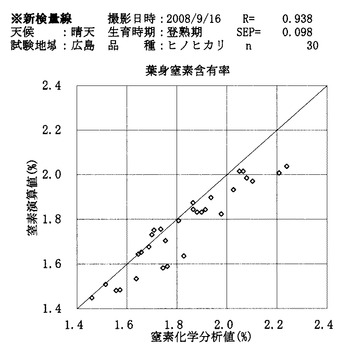
【図4】晴天時における新検量線の測定精度を示した図である。
【図5】曇天時における新検量線の測定精度を示した図である。
【図6】雲ムラ時における新検量線の測定精度を示した図である。
【図7】晴天時における旧検量線の測定精度を示した図である。
【図8】曇天時における旧検量線の測定精度を示した図である。
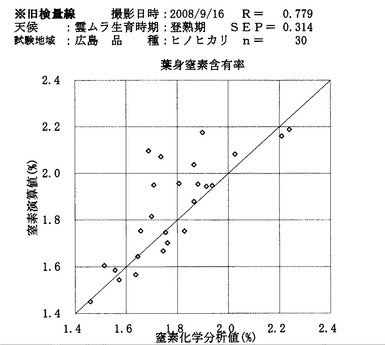
【図9】雲ムラ時における旧検量線の測定精度を示した図である。
【発明を実施するための形態】
【0018】
以下、図面を参照して本発明を実施するための最良の形態を説明する。検量線を作成するにあたり、まず、リモートセンシングによる圃場の撮影方法について説明する。ここでは圃場で生育する作物を水稲とし、測定対象が前記水稲(稲体)の葉身窒素含有率である場合を例にして説明する。
【0019】
なお、本願発明は、水稲に限定されるものではなく、陸稲や麦類等の作物の場合でも使用でき、また、測定対象は作物の窒素含有率に限定されるものではなく、収穫後に穀粒が含有するタンパク予測値等の検量線作成にも使用することができる。
【0020】
地上に設置したカメラで圃場を斜め上方から撮影するリモートセンシングに関しては、特許文献2及び特許文献3にて説明があるので、ここでは概要のみを説明する。図1は、圃場1を撮影する一例を示しており、水稲を栽培している圃場1に向けてカメラ3が所定の位置に設置されている。なお、圃場1は太陽光にさらされており、カメラ3の撮影範囲には圃場1全体が含まれている。また、カメラ3はデータ処理装置20と接続されている。該データ処理装置20は、カメラ3で撮影した画像データを処理できるものであればよく、例えば一般的なパソコンを用いることができる。
【0021】
なお、図1においては、データ処理装置20は、昇降装置2に内蔵されており、該昇降装置2はトラック4に積載されている。また、カメラ3の昇降は昇降装置2によって行われる。ところで、ここでの圃場1とは、「畔(あぜ)」で区切られた1枚の圃場であってもよいし、複数の圃場が含まれる「圃場群」であってもよい。
【0022】
符号21は、作物の葉身に光を直接照射する方法により該作物の作物情報の測定を行う、後述する携帯型の測定装置である。
【0023】
前記カメラ3はCCDを備えており、該CCDは、前記水稲からの太陽光(自然光)による反射光を該カメラ3内のレンズを介して受光する。前記CCDが受光して得た画像データ(反射光)はデータ処理装置20に送出される。カメラ3では、RGBのR(赤)信号、G(緑)信号、B(青)信号及び赤外線(又は近赤外線)の信号をそれぞれ撮影可能である。
【0024】
本発明に使用するカメラは、撮影した情報を、CCDを搭載したデジタルカメラで撮影した画像データと同様な状態にデジタル化できるものであれば、特に限定されることはない。なお、2台のカメラを用いて、1台のカメラでR信号、G信号及びB信号を、もう1台のカメラで近赤外線域(NIR)のNIR信号又は赤外線域(IR)のIR信号を取得するようにしてもよい。
【0025】
カメラ3で撮影するのは、圃場1内の稲体の太陽光による反射光である。受光して得られた反射光の情報は、撮影終了後、データ処理装置20に送出される。なお、カメラ3への圃場からの反射光は、カメラ3に近い位置の圃場からの反射光と、カメラ3から離れた位置の圃場からの反射光とで、カメラ3への入射角度が異なる。したがって、入射角度が異なることによる入射光の差異を補正することが好ましい。
【0026】
本発明では、データ処理装置20に送出された稲体の反射光の情報(画像データ)を用いて検量線の作成を行っている。圃場1内の稲体の反射光を受光して得た前記反射光の情報を、図2に示すように、一定面積の複数の区域に分けて、前記一定面積の各区域内で生育している稲体の反射光の平均値をそれぞれ求める。
【0027】
また、前記一定面積の各区域内に生育している複数の稲体から稲葉を採取し、採取した稲葉の窒素含有率をデュマ法等の化学分析により直接求め、該窒素含有率の平均値を区域毎にそれぞれ算出する。
【0028】
そして、前記一定面積の各区域において、前記反射光の平均値を説明変数、前記窒素含有率の平均値を目的変数、さらに雲による要因をダミー変数として、前記一定面積の区域毎のサンプルデータとする。
【0029】
これら圃場1内の各区域による複数のサンプルデータにより多変量解析を行って検量線を作成する。
【0030】
図2においては、圃場1を30個の区域に分けているので、圃場1を撮影した1枚の画像から30個の前記サンプルデータを求めることができる。なお、前記画像が複数の圃場を含む圃場群を撮影している場合には、各圃場を1つの区域とすることができる。
【0031】
ところで、1枚の画像から求められたサンプルデータは、基本的にダミー変数が共通となるので、雲による要因の種類毎に画像を撮影する必要がある。雲による要因は、雲がない「晴天」、雲により完全に覆われている「曇天」、そして一部分に雲の影を含む「雲ムラ」の3通りが考えられる。このため、「晴天」「曇天」及び「雲ムラ」の3種類の状態でそれぞれ撮影し、雲による要因に対応したダミー変数のサンプルデータを求める必要がある。
【0032】
ここで、図3により、本発明での「晴天」、「曇天」及び「雲ムラ」について説明する。「晴天」とは、撮影する圃場に雲による影が完全に無い状態を示し(図3(a))、「曇天」とは、撮影する圃場が完全に雲により覆われ、圃場全体が曇っている状態を示す(図3(b))。そして、「雲ムラ」とは、図3(c)に示すように、圃場の一部分に雲による影が存在し、該影と「晴天」の部分が混在している状態を示す。なお、図3中の斜線部が雲の影の部分を表している。
【0033】
次に、検量線の作成方法について具体的に説明をする。本発明の検量線の作成方法では、例えば、下記に示す重回帰式(数式1)により検量線を作成する。
【0034】
【数1】

【0035】
数式1において、Nは測定対象の窒素含有率、F0、F1、F2、F3、F4、E1、E2は重回帰係数、R1、R2、R3及びR4は各波長の反射光の情報、そして、D1、D2はダミー変数を表している。
【0036】
窒素含有率Nは、圃場内の一定面積の区域で生育している複数の稲体からそれぞれ稲葉を採取し、それら複数の稲葉の窒素含有率を化学分析により求めて平均した値である。よって、前記窒素含有率は、前記区域におけるサンプルデータの目的変数となる。
【0037】
R1、R2、R3及びR4で表した各反射光の情報は、前記区域で生育している稲体の反射光の区域毎の平均値である。本発明では、反射光の情報として、RGB信号のR信号、G信号、B信号、そして近赤外線領域の波長であるNIR信号の4波長域の波長の反射光を測定し、これら反射光を前記区域におけるサンプルデータの説明変数に用いている。
【0038】
D1及びD2は、3通りの撮影条件により「1」又は「0」をとるダミー変数である。本実施例では、圃場を撮影した画像毎にダミー変数を設けている。雲による要因は、雲がない「晴天」、雲により完全に覆われている「曇天」、そして一部分に雲の影を含む「雲ムラ」の3通りが考えられる。そこで、天候によりダミー変数(D1及びD2)を設け、表1に示すようなダミー変数の組み合わせとした。
【0039】
【表1】
【0040】
なお、数式1の各反射光の情報(R1、R2、R3及びR4)は、対数をとることが好ましく、数式2で示すような重回帰式を用いて多変量解析を行うことが望ましい。
【0041】
【数2】
【0042】
ところで、本実施例では、ダミー変数を用いた多変量解析により検量線の作成を行っているが、検量線作成後に、圃場を撮影し、撮影して得られた画像データから作物の窒素含有率等の値を、前記検量線を使用して演算する際に、各ダミー変数に「1」又は「0」を入力する必要がある。前記画像数が少なければ、大きな問題とならないが、画像数が多い場合、画像毎に各ダミー変数に「1」又は「0」を入力する必要があるため、作業効率が悪くなるという問題が生じる。
【0043】
この問題点を解決するために本発明では、前記数式1又は2で表される検量線を実際に使用する際に、画像毎に各ダミー変数に「1」又は「0」を入力することを省略しつつ、かつ、測定精度を向上させる方法を実施している。
【0044】
前記方法について説明する。前記数式1又は2のダミー変数に、「1」又は「0」を入力しなければ、重回帰係数F0で表される定数項と重回帰係数E1及びE2で表される各定数項との総和(以下、「バイアス分」という、一次関数でいう「切片」に該当する)を計算することが困難である。このため、ダミー変数に「1」又は「0」を入力しなければ、正確なバイアス分を計算することができない。そこで、前記方法では別途バイアス分に該当する値を求める。
【0045】
前記バイアス分については、例えば、特開平10−96692に記載されているような携帯型の葉の成分測定装置(以下、「測定装置21」という)を利用して求める。測定装置21によれば、圃場内で生育している稲体の窒素含有率を容易に測定することができ、また、稲葉を直接測定して太陽光等の影響を受けずに稲体の窒素含有率を求めることができる。なお、バイアス分の求め方については、測定装置21のような装置を用いる以外にもその他の一般的に知られている手法により求めてもよい。
【0046】
次に、測定装置21を用いたバイアス分の求め方について説明する。この場合、前述の検量線の作成方法により作成した数式2からバイアス分を計算する項を取り除いた、下記に示す数式3を仮検量線として使用する。当然、数式2の代わりに数式1からバイアス分を計算する項を取り除いた数式でもよい。
【0047】
【数3】
【0048】
ここで、仮検量線(数式3)がデータ処理装置20に記憶された状態で、カメラ3により圃場1を撮影したとする。この場合、図1に示すような、圃場1内の一定面積の区域Yで生育している稲体の窒素含有率は、前記撮影によって求めた各反射光の情報のうち、区域Yの作物からの反射光の情報を前記仮検量線に代入することで演算できる。なお、この値が3.0%(以下、「第1の作物情報」という)であったとする。前記区域の形状や面積は特に限定されないが、画像データをパソコンで処理することを考慮すれば、形状は四角形とするのが好ましく、特に正方形が好ましい。また、形状を四角形とする場合、一辺の長さは8m程度が好ましい。
【0049】
次に、前記区域Yで生育している稲体の窒素含有率が、測定装置21による測定で、3.8%(以下、「第2の作物情報」という)であったとする。なお、測定装置21による測定値は、前記区域Yに生育している複数の稲体の葉を測定した平均値である。測定装置21での測定は、1つの稲体につき1枚の葉を測定すればよく、前記葉の枚数は20枚以上とすることが望ましい。より好ましくは25枚以上である。また、測定装置21での測定の代わりに化学分析を行って前記測定値(平均値)を求めてもよい。
【0050】
前記第1の作物情報はデータ処理装置20内に記憶でき、前記第2の作物情報は測定装置21に記憶されているから、この第2の作物情報をデータ処理装置20に入力して、データ処理装置20内に記憶する。前記入力方法は、自動又は手動のどちらの方法でも良い。データ処理装置20では、前記第1の作物情報と前記第2の作物情報との差を算出する。ここでは第1の作物情報を3.0%、第2の作物情報を3.8%としているので、第1の作物情報が第2の作物情報よりも0.8%低い値となっている。よって、差は+0.8%となるので、仮検量線による演算結果に対して+0.8%の補正が必要となる。そこで本実施例では、この差(+0.8%)を前記仮検量線のバイアス分(定数項)とする。したがって、前記仮検量線は、下記の数式4で示すように、
【0051】
【数4】
【0052】
となる。数式4で表される検量線は、前記バイアス分を求めるために撮影した前記圃場1内の稲体の窒素含有率を求めるのに使用することができる。したがって、区域Y以外の区域の反射光の情報(R1、R2、R3及びR4)を前記検量線(数式4)に代入することで、前記各区域の稲体の窒素含有率を簡単に求めることができる。なお、前記検量線を圃場1とは異なる圃場を撮影した画像データに用いることもできるが、測定精度が低下するおそれがある。また、圃場1は、1枚の圃場と限定されるわけではなく、複数の圃場を含む圃場群であってもよい。このようにして、圃場で栽培されている作物の作物情報(ここでは稲体の窒素含有率)を広い範囲に渡って簡単に測定することが可能となる。なお、1枚の圃場ごとに前記窒素含有率の平均値を求め、この平均値を、各圃場の窒素含有率として使用するのが一般的である。
【実施例1】
【0053】
本実施例の効果を確認するため、「晴天」、「曇天」及び「雲ムラ」の画像データを使用して作成する上記検量線(以下、「新検量線」という)と、「晴天」及び「曇天」の画像データを使用して作成する従来の検量線(以下、「旧検量線」という)とで比較を行った。
【0054】
旧検量線の作成には、同一の位置から同一の圃場をカメラ3で撮影した2枚の画像を使用した。これら2枚の画像は、2008年9月16日に撮影を行った「晴天」の画像と、2008年9月18日に撮影を行った「曇天」の画像である。前記圃場を30個の区域に分け、1枚の画像から30個のサンプルデータを作成し、計60個のサンプルデータを求めた。そして、これら60個のサンプルデータと上記数式2とを用いて多変量解析(重回帰分析)により旧検量線を作成した。なお、前記サンプルデータは、上記実施形態に記載した方法により求めている。
【0055】
また、前記旧検量線のバイアス分は、上記数式3で表される式を仮検量線とし、計60個の前記サンプルデータの1つの区域について、前記仮検量線で演算した値を求め、この値と前記区域の化学分析値との差から求めた値とした。
【0056】
新検量線の作成には、前記旧検量線の作成に使用した「晴天」の画像及び「曇天」の画像に加えて、それら画像と同一の圃場を同一の位置からカメラ3で撮影した「雲ムラ」の画像を使用した。前記撮影は2008年9月18日に行った。旧検量線作成時と同様に、前記圃場を30個の区画に分け、1枚の画像から30個のサンプルデータを作成し、計90個のサンプルデータを求めた。そして、これら90個のサンプルデータと上記数式2を用いて多変量解析により新検量線を作成した。なお、前記サンプルデータは、上記実施形態に記載した方法により求めている。また、「晴天」及び「曇天」の2枚の画像から作成される計60個のサンプルデータは、前記旧検量線を作成したときに使用したものと共通である。
【0057】
前記新検量線のバイアス分は、旧検量線と同様に、上記数式3で表される式を仮検量線とし、計90個の前記サンプルデータの1つの区域について、前記仮検量線で演算した値を求め、この値と前記区域の化学分析値との差から求めた値とした。
【0058】
ところで、新検量線及び旧検量線は、目的変数を稲体の葉身窒素含有率、説明変数を前記稲体からの太陽光(自然光)の反射光とし、雲による要因である「晴天」、「曇天」及び「雲ムラ」をダミー変数として求める。また、前記圃場内の作物(稲体)の品種はヒノヒカリであり、生育時期は登熟期である。
【0059】
前記旧検量線及び前記新検量線の検証比較には、検量線作成時に使用した画像とは別の3枚の画像を使用した。これら3枚の画像は、「晴天」の画像S、「曇天」の画像D及び「雲ムラ」の画像Cからなる。これら3枚の画像S、画像D及び画像Cは、検量線作成時に使用した画像を撮影した際に、カメラ3にて撮影したものであり、前記画像と同一の圃場を同一の位置から撮影している。
【0060】
そして、画像S、画像D及び画像C毎に、検量線作成時と同様に、画像内の圃場を30個の区域に分け、該区域毎に前記旧検量線及び新検量線にて作物の葉身窒素含有率を演算し、演算して求めた値と、30個の前記区域の化学分析値とを用いて、比較を行った。その結果を、図4〜図9と、表2とに示す。
【0061】
【表2】
【0062】
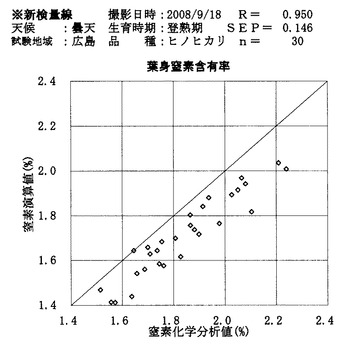
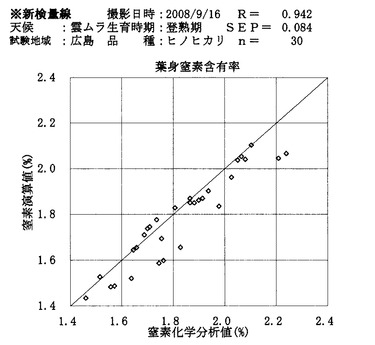
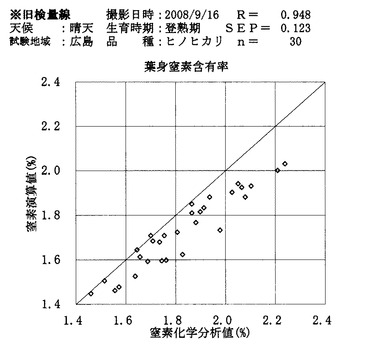
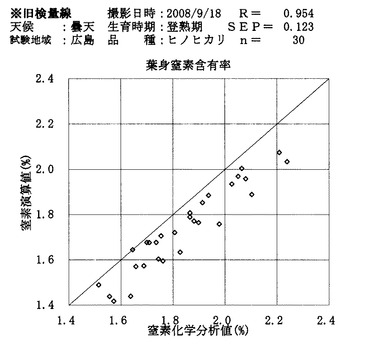
図4〜図6は、新検量線を使用した場合で、図4は晴天時、図5は曇天時、そして図6は雲ムラ時の測定精度をそれぞれ示した図である。図7〜図9は、旧検量線を使用した場合で、図7は晴天時、図8は曇天時、そして図9は雲ムラ時の測定精度をそれぞれ示した図である。図4〜図9は、それぞれ横軸に化学分析値、縦軸に演算値をとったグラフである。
【0063】
表2には、晴天時の画像S、曇天時の画像D及び雲ムラ時の画像Cについて、それぞれ旧検量線及び新検量線で演算した値と、化学分析値との相関係数及び標準誤差(SEP)が示されている。表2によれば、晴天時及び曇天時については、旧検量線と新検量線とで、大きな差異はない。しかし、雲ムラ時には、旧検量線の相関係数が0.779、標準誤差が0.314と測定精度が低下しているのに対し、新検量線の相関係数は0.942、標準誤差0.084であり、晴天時及び曇天時と同等以上の測定精度であった。このため、新検量線は、雲ムラ状態であっても十分に使用することが可能であるといえる。
【実施例2】
【0064】
本発明の検量線の作成方法においては、下記の数式5に示すように、R(赤)信号の反射光の情報、G(緑)信号の反射光の情報及びB(青)信号の反射光の情報とNIR信号の反射光の情報との比の対数をとった重回帰式としてもよい。
【0065】
【数5】
【実施例3】
【0066】
また、本発明の検量線の作成方法においては、ダミー変数を使用せずに、単に、晴天時の画像データ、曇天時の画像データ及び雲ムラ時の画像データとを混合した画像データによって多変量解析を行って検量線を作成してもよい。この場合は、数式6、7又は8の何れかを使用すればよい。
【0067】
【数6】
【0068】
【数7】
【0069】
【数8】
【0070】
数式6〜数式8の何れかを用いて検量線を作成した場合には、ダミー変数を使用していないので、作成した検量線を使用する際にダミー変数を入力する必要はない。なお、バイアス成分については、測定装置21等によって別途求めてもよい。
【産業上の利用可能性】
【0071】
本発明の検量線の作成方法は、地上からの撮影の他、気球、ラジコン飛行装置(飛行機、ヘリ)又は有人飛行機等にカメラを搭載して圃場を撮影するリモートセンシングにおいても用いることが可能である。なお、地上からの撮影とは、地面から1m〜30mの高さから圃場を見下ろすようにカメラにて撮影することであって、遠方を撮影する場合には望遠レンズを使用することが望ましい。望遠レンズを使用することで、遠方を撮影した画像分まで解析時の分解能を確保することが可能となり、より広い範囲を一度に測定することができる。
【符号の説明】
【0072】
1 圃場
2 昇降装置
3 カメラ
4 トラック
20 データ処理装置
21 測定装置
【技術分野】
【0001】
本発明は、リモートセンシングにおいて、撮影対象の圃場に雲の影がない状態(晴天)又は圃場全体に雲の影がある状態(曇天)の、これら照度が均一と考えられる二つの状態(以下、「照度均一状態」という)だけでなく、圃場に雲の影が部分的に混在する状態(以下、「雲ムラ状態」という)でも測定可能な検量線の作成方法に関する。
【背景技術】
【0002】
従来、特許文献1に記載されているように、リモートセンシングによる圃場の撮影は、晴天時又は曇天時の照度均一状態で行われている。
【0003】
また、リモートセンシングにおいて作物情報の演算に使用する検量線は、特許文献2に記載されているように、測定対象の作物の光特性や太陽光強度等の撮影条件の違いによる影響の少ない検量線を作成するために、様々な撮影条件を説明変数に追加して検量線を作成することが考えられている。
【0004】
しかし、特許文献2に記載されている検量線の作成方法は、照度均一状態での撮影データを使用していると思われるので、前記作成方法で作成した検量線を使用して雲ムラ状態での撮影データを演算すると、測定精度が低下するおそれがある。このため、雲ムラ状態の時に撮影を行うことは望ましいことではなく、よって、撮影時間が制約を受けてしまう。したがって、雲ムラ状態は、撮影を効率よく計画的に行う場合の阻害要因となっている。
【0005】
ところで、特許文献3には、雲ムラ状態の画像データを、変換して使用することが記載されている。特許文献3によれば、湖等の水域の汚濁状態を監視する際に、予め基準となる画像データからヒストグラムを作成しておき、該ヒストグラムを使用して雲ムラ状態の画像データを変換している。
【0006】
この方法では、基準となる画像データと雲ムラ状態の画像データとが同一の撮影範囲で撮影された画像である必要があると考えられる。特許文献3のように、測定対象の変化が比較的少ない湖等の水域の定点観測においては問題とならないが、例えば圃場においては、測定対象である圃場内作物が日々生長するため、圃場内作物の生育段階毎に基準となる画像データを求めておく必要があると思われる。したがって、圃場に係るリモートセンシングにおいては効率的な方法とはいえない。
【0007】
このため、照度均一状態だけでなく雲ムラ状態で撮影した画像データであっても特別な処理をすることなく、照度均一状態で撮影した画像データと同様に使用可能とすることが望まれている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2003−009694号公報
【特許文献2】特開2008−175537号公報
【特許文献3】特開平3−154851号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は上記問題点にかんがみて、照度均一状態だけでなく雲ムラ状態で撮影した画像データでも特別な処理をすることなく、照度均一状態で撮影した画像データと同様に使用可能とすることを目的とし、照度均一状態だけでなく雲ムラ状態の画像データにも対応した検量線を作成可能とすることを技術的課題とする。
【課題を解決するための手段】
【0010】
上記課題を解決するため本発明は、圃場内の作物情報を算出するリモートセンシングにおいて、圃場内の複数の区域に生育している作物からの反射光を、受光手段による撮影により前記区域毎に測定する工程と、前記圃場内の作物の作物情報を、前記区域毎に化学分析等により求める工程と、前記撮影により得た反射光の情報を説明変数、前記作物情報を目的変数とした、あらかじめ定めた重回帰式の重回帰係数を算出する工程とを含み、前記測定は、前記圃場が照度均一状態及び雲ムラ状態である両方の状態において行い、それぞれの状態での前記反射光の情報を前記説明変数に用いて検量線を作成する、という技術的手段を講じた。
【0011】
また、前記検量線の作成方法において、照度均一状態及び雲ムラ状態をダミー変数として用いる、という技術的手段を講じた。
【0012】
さらに、前記照度均一状態が、晴天時又は/及び曇天時であって、前記雲ムラ状態が、雲の影が撮影する圃場内に部分的に混在する状態であることを特徴とする。
【0013】
その上、測定精度を向上させるために、請求項1乃至3に記載の作成方法により作成した検量線にて作物の作物情報をリモートセンシングにおいて、圃場内に生育している作物からの反射光を、カメラによる撮影により測定する工程と、前記検量線の定数項又は/及びダミー変数の係数を0とした仮検量線に、前記撮影により得た反射光の情報を適用して、前記圃場内の一定面積の区域に生育している作物の第1の作物情報を演算する工程と、作物の葉身に光を直接照射する方法によって前記区域に生育している作物の第2の作物情報を測定する工程と、前記第1の作物情報と前記第2の作物情報との差を算出する工程とを含み、前記差を前記仮検量線の定数項の値としたものを検量線とする、という技術的手段を講じた。
【0014】
そして、本発明の請求項1乃至4に記載の検量線の作成方法で作成した検量線を使用してリモートセンシングによる作物の測定を行う、という技術的手段を講じた。
【発明の効果】
【0015】
本発明によれば、検量線作成時の多変量解析において照度均一状態だけでなく雲ムラ状態の画像データを用いるので、雲ムラ状態を考慮した検量線が作成可能である。このため、従来、撮影を行えなかった雲ムラ状態でも圃場の撮影が行えるようになり、作業を計画的に効率良く実施できるようになった。
【0016】
また、本発明では、太陽光等の影響を受けないように作物を直接測定した測定値を用いて検量線のバイアス分(定数項)に該当する値を求めるので、測定精度を向上させることが可能となった。
【図面の簡単な説明】
【0017】
【図1】撮影状態を示した説明図である。
【図2】撮影した圃場の画像を、一定面積の複数の区域に分けた状態を示す図である。
【図3】「晴天」「曇天」及び「雲ムラ」の3種類の状態を示した図である。
【図4】晴天時における新検量線の測定精度を示した図である。
【図5】曇天時における新検量線の測定精度を示した図である。
【図6】雲ムラ時における新検量線の測定精度を示した図である。
【図7】晴天時における旧検量線の測定精度を示した図である。
【図8】曇天時における旧検量線の測定精度を示した図である。
【図9】雲ムラ時における旧検量線の測定精度を示した図である。
【発明を実施するための形態】
【0018】
以下、図面を参照して本発明を実施するための最良の形態を説明する。検量線を作成するにあたり、まず、リモートセンシングによる圃場の撮影方法について説明する。ここでは圃場で生育する作物を水稲とし、測定対象が前記水稲(稲体)の葉身窒素含有率である場合を例にして説明する。
【0019】
なお、本願発明は、水稲に限定されるものではなく、陸稲や麦類等の作物の場合でも使用でき、また、測定対象は作物の窒素含有率に限定されるものではなく、収穫後に穀粒が含有するタンパク予測値等の検量線作成にも使用することができる。
【0020】
地上に設置したカメラで圃場を斜め上方から撮影するリモートセンシングに関しては、特許文献2及び特許文献3にて説明があるので、ここでは概要のみを説明する。図1は、圃場1を撮影する一例を示しており、水稲を栽培している圃場1に向けてカメラ3が所定の位置に設置されている。なお、圃場1は太陽光にさらされており、カメラ3の撮影範囲には圃場1全体が含まれている。また、カメラ3はデータ処理装置20と接続されている。該データ処理装置20は、カメラ3で撮影した画像データを処理できるものであればよく、例えば一般的なパソコンを用いることができる。
【0021】
なお、図1においては、データ処理装置20は、昇降装置2に内蔵されており、該昇降装置2はトラック4に積載されている。また、カメラ3の昇降は昇降装置2によって行われる。ところで、ここでの圃場1とは、「畔(あぜ)」で区切られた1枚の圃場であってもよいし、複数の圃場が含まれる「圃場群」であってもよい。
【0022】
符号21は、作物の葉身に光を直接照射する方法により該作物の作物情報の測定を行う、後述する携帯型の測定装置である。
【0023】
前記カメラ3はCCDを備えており、該CCDは、前記水稲からの太陽光(自然光)による反射光を該カメラ3内のレンズを介して受光する。前記CCDが受光して得た画像データ(反射光)はデータ処理装置20に送出される。カメラ3では、RGBのR(赤)信号、G(緑)信号、B(青)信号及び赤外線(又は近赤外線)の信号をそれぞれ撮影可能である。
【0024】
本発明に使用するカメラは、撮影した情報を、CCDを搭載したデジタルカメラで撮影した画像データと同様な状態にデジタル化できるものであれば、特に限定されることはない。なお、2台のカメラを用いて、1台のカメラでR信号、G信号及びB信号を、もう1台のカメラで近赤外線域(NIR)のNIR信号又は赤外線域(IR)のIR信号を取得するようにしてもよい。
【0025】
カメラ3で撮影するのは、圃場1内の稲体の太陽光による反射光である。受光して得られた反射光の情報は、撮影終了後、データ処理装置20に送出される。なお、カメラ3への圃場からの反射光は、カメラ3に近い位置の圃場からの反射光と、カメラ3から離れた位置の圃場からの反射光とで、カメラ3への入射角度が異なる。したがって、入射角度が異なることによる入射光の差異を補正することが好ましい。
【0026】
本発明では、データ処理装置20に送出された稲体の反射光の情報(画像データ)を用いて検量線の作成を行っている。圃場1内の稲体の反射光を受光して得た前記反射光の情報を、図2に示すように、一定面積の複数の区域に分けて、前記一定面積の各区域内で生育している稲体の反射光の平均値をそれぞれ求める。
【0027】
また、前記一定面積の各区域内に生育している複数の稲体から稲葉を採取し、採取した稲葉の窒素含有率をデュマ法等の化学分析により直接求め、該窒素含有率の平均値を区域毎にそれぞれ算出する。
【0028】
そして、前記一定面積の各区域において、前記反射光の平均値を説明変数、前記窒素含有率の平均値を目的変数、さらに雲による要因をダミー変数として、前記一定面積の区域毎のサンプルデータとする。
【0029】
これら圃場1内の各区域による複数のサンプルデータにより多変量解析を行って検量線を作成する。
【0030】
図2においては、圃場1を30個の区域に分けているので、圃場1を撮影した1枚の画像から30個の前記サンプルデータを求めることができる。なお、前記画像が複数の圃場を含む圃場群を撮影している場合には、各圃場を1つの区域とすることができる。
【0031】
ところで、1枚の画像から求められたサンプルデータは、基本的にダミー変数が共通となるので、雲による要因の種類毎に画像を撮影する必要がある。雲による要因は、雲がない「晴天」、雲により完全に覆われている「曇天」、そして一部分に雲の影を含む「雲ムラ」の3通りが考えられる。このため、「晴天」「曇天」及び「雲ムラ」の3種類の状態でそれぞれ撮影し、雲による要因に対応したダミー変数のサンプルデータを求める必要がある。
【0032】
ここで、図3により、本発明での「晴天」、「曇天」及び「雲ムラ」について説明する。「晴天」とは、撮影する圃場に雲による影が完全に無い状態を示し(図3(a))、「曇天」とは、撮影する圃場が完全に雲により覆われ、圃場全体が曇っている状態を示す(図3(b))。そして、「雲ムラ」とは、図3(c)に示すように、圃場の一部分に雲による影が存在し、該影と「晴天」の部分が混在している状態を示す。なお、図3中の斜線部が雲の影の部分を表している。
【0033】
次に、検量線の作成方法について具体的に説明をする。本発明の検量線の作成方法では、例えば、下記に示す重回帰式(数式1)により検量線を作成する。
【0034】
【数1】
【0035】
数式1において、Nは測定対象の窒素含有率、F0、F1、F2、F3、F4、E1、E2は重回帰係数、R1、R2、R3及びR4は各波長の反射光の情報、そして、D1、D2はダミー変数を表している。
【0036】
窒素含有率Nは、圃場内の一定面積の区域で生育している複数の稲体からそれぞれ稲葉を採取し、それら複数の稲葉の窒素含有率を化学分析により求めて平均した値である。よって、前記窒素含有率は、前記区域におけるサンプルデータの目的変数となる。
【0037】
R1、R2、R3及びR4で表した各反射光の情報は、前記区域で生育している稲体の反射光の区域毎の平均値である。本発明では、反射光の情報として、RGB信号のR信号、G信号、B信号、そして近赤外線領域の波長であるNIR信号の4波長域の波長の反射光を測定し、これら反射光を前記区域におけるサンプルデータの説明変数に用いている。
【0038】
D1及びD2は、3通りの撮影条件により「1」又は「0」をとるダミー変数である。本実施例では、圃場を撮影した画像毎にダミー変数を設けている。雲による要因は、雲がない「晴天」、雲により完全に覆われている「曇天」、そして一部分に雲の影を含む「雲ムラ」の3通りが考えられる。そこで、天候によりダミー変数(D1及びD2)を設け、表1に示すようなダミー変数の組み合わせとした。
【0039】
【表1】
【0040】
なお、数式1の各反射光の情報(R1、R2、R3及びR4)は、対数をとることが好ましく、数式2で示すような重回帰式を用いて多変量解析を行うことが望ましい。
【0041】
【数2】
【0042】
ところで、本実施例では、ダミー変数を用いた多変量解析により検量線の作成を行っているが、検量線作成後に、圃場を撮影し、撮影して得られた画像データから作物の窒素含有率等の値を、前記検量線を使用して演算する際に、各ダミー変数に「1」又は「0」を入力する必要がある。前記画像数が少なければ、大きな問題とならないが、画像数が多い場合、画像毎に各ダミー変数に「1」又は「0」を入力する必要があるため、作業効率が悪くなるという問題が生じる。
【0043】
この問題点を解決するために本発明では、前記数式1又は2で表される検量線を実際に使用する際に、画像毎に各ダミー変数に「1」又は「0」を入力することを省略しつつ、かつ、測定精度を向上させる方法を実施している。
【0044】
前記方法について説明する。前記数式1又は2のダミー変数に、「1」又は「0」を入力しなければ、重回帰係数F0で表される定数項と重回帰係数E1及びE2で表される各定数項との総和(以下、「バイアス分」という、一次関数でいう「切片」に該当する)を計算することが困難である。このため、ダミー変数に「1」又は「0」を入力しなければ、正確なバイアス分を計算することができない。そこで、前記方法では別途バイアス分に該当する値を求める。
【0045】
前記バイアス分については、例えば、特開平10−96692に記載されているような携帯型の葉の成分測定装置(以下、「測定装置21」という)を利用して求める。測定装置21によれば、圃場内で生育している稲体の窒素含有率を容易に測定することができ、また、稲葉を直接測定して太陽光等の影響を受けずに稲体の窒素含有率を求めることができる。なお、バイアス分の求め方については、測定装置21のような装置を用いる以外にもその他の一般的に知られている手法により求めてもよい。
【0046】
次に、測定装置21を用いたバイアス分の求め方について説明する。この場合、前述の検量線の作成方法により作成した数式2からバイアス分を計算する項を取り除いた、下記に示す数式3を仮検量線として使用する。当然、数式2の代わりに数式1からバイアス分を計算する項を取り除いた数式でもよい。
【0047】
【数3】
【0048】
ここで、仮検量線(数式3)がデータ処理装置20に記憶された状態で、カメラ3により圃場1を撮影したとする。この場合、図1に示すような、圃場1内の一定面積の区域Yで生育している稲体の窒素含有率は、前記撮影によって求めた各反射光の情報のうち、区域Yの作物からの反射光の情報を前記仮検量線に代入することで演算できる。なお、この値が3.0%(以下、「第1の作物情報」という)であったとする。前記区域の形状や面積は特に限定されないが、画像データをパソコンで処理することを考慮すれば、形状は四角形とするのが好ましく、特に正方形が好ましい。また、形状を四角形とする場合、一辺の長さは8m程度が好ましい。
【0049】
次に、前記区域Yで生育している稲体の窒素含有率が、測定装置21による測定で、3.8%(以下、「第2の作物情報」という)であったとする。なお、測定装置21による測定値は、前記区域Yに生育している複数の稲体の葉を測定した平均値である。測定装置21での測定は、1つの稲体につき1枚の葉を測定すればよく、前記葉の枚数は20枚以上とすることが望ましい。より好ましくは25枚以上である。また、測定装置21での測定の代わりに化学分析を行って前記測定値(平均値)を求めてもよい。
【0050】
前記第1の作物情報はデータ処理装置20内に記憶でき、前記第2の作物情報は測定装置21に記憶されているから、この第2の作物情報をデータ処理装置20に入力して、データ処理装置20内に記憶する。前記入力方法は、自動又は手動のどちらの方法でも良い。データ処理装置20では、前記第1の作物情報と前記第2の作物情報との差を算出する。ここでは第1の作物情報を3.0%、第2の作物情報を3.8%としているので、第1の作物情報が第2の作物情報よりも0.8%低い値となっている。よって、差は+0.8%となるので、仮検量線による演算結果に対して+0.8%の補正が必要となる。そこで本実施例では、この差(+0.8%)を前記仮検量線のバイアス分(定数項)とする。したがって、前記仮検量線は、下記の数式4で示すように、
【0051】
【数4】
【0052】
となる。数式4で表される検量線は、前記バイアス分を求めるために撮影した前記圃場1内の稲体の窒素含有率を求めるのに使用することができる。したがって、区域Y以外の区域の反射光の情報(R1、R2、R3及びR4)を前記検量線(数式4)に代入することで、前記各区域の稲体の窒素含有率を簡単に求めることができる。なお、前記検量線を圃場1とは異なる圃場を撮影した画像データに用いることもできるが、測定精度が低下するおそれがある。また、圃場1は、1枚の圃場と限定されるわけではなく、複数の圃場を含む圃場群であってもよい。このようにして、圃場で栽培されている作物の作物情報(ここでは稲体の窒素含有率)を広い範囲に渡って簡単に測定することが可能となる。なお、1枚の圃場ごとに前記窒素含有率の平均値を求め、この平均値を、各圃場の窒素含有率として使用するのが一般的である。
【実施例1】
【0053】
本実施例の効果を確認するため、「晴天」、「曇天」及び「雲ムラ」の画像データを使用して作成する上記検量線(以下、「新検量線」という)と、「晴天」及び「曇天」の画像データを使用して作成する従来の検量線(以下、「旧検量線」という)とで比較を行った。
【0054】
旧検量線の作成には、同一の位置から同一の圃場をカメラ3で撮影した2枚の画像を使用した。これら2枚の画像は、2008年9月16日に撮影を行った「晴天」の画像と、2008年9月18日に撮影を行った「曇天」の画像である。前記圃場を30個の区域に分け、1枚の画像から30個のサンプルデータを作成し、計60個のサンプルデータを求めた。そして、これら60個のサンプルデータと上記数式2とを用いて多変量解析(重回帰分析)により旧検量線を作成した。なお、前記サンプルデータは、上記実施形態に記載した方法により求めている。
【0055】
また、前記旧検量線のバイアス分は、上記数式3で表される式を仮検量線とし、計60個の前記サンプルデータの1つの区域について、前記仮検量線で演算した値を求め、この値と前記区域の化学分析値との差から求めた値とした。
【0056】
新検量線の作成には、前記旧検量線の作成に使用した「晴天」の画像及び「曇天」の画像に加えて、それら画像と同一の圃場を同一の位置からカメラ3で撮影した「雲ムラ」の画像を使用した。前記撮影は2008年9月18日に行った。旧検量線作成時と同様に、前記圃場を30個の区画に分け、1枚の画像から30個のサンプルデータを作成し、計90個のサンプルデータを求めた。そして、これら90個のサンプルデータと上記数式2を用いて多変量解析により新検量線を作成した。なお、前記サンプルデータは、上記実施形態に記載した方法により求めている。また、「晴天」及び「曇天」の2枚の画像から作成される計60個のサンプルデータは、前記旧検量線を作成したときに使用したものと共通である。
【0057】
前記新検量線のバイアス分は、旧検量線と同様に、上記数式3で表される式を仮検量線とし、計90個の前記サンプルデータの1つの区域について、前記仮検量線で演算した値を求め、この値と前記区域の化学分析値との差から求めた値とした。
【0058】
ところで、新検量線及び旧検量線は、目的変数を稲体の葉身窒素含有率、説明変数を前記稲体からの太陽光(自然光)の反射光とし、雲による要因である「晴天」、「曇天」及び「雲ムラ」をダミー変数として求める。また、前記圃場内の作物(稲体)の品種はヒノヒカリであり、生育時期は登熟期である。
【0059】
前記旧検量線及び前記新検量線の検証比較には、検量線作成時に使用した画像とは別の3枚の画像を使用した。これら3枚の画像は、「晴天」の画像S、「曇天」の画像D及び「雲ムラ」の画像Cからなる。これら3枚の画像S、画像D及び画像Cは、検量線作成時に使用した画像を撮影した際に、カメラ3にて撮影したものであり、前記画像と同一の圃場を同一の位置から撮影している。
【0060】
そして、画像S、画像D及び画像C毎に、検量線作成時と同様に、画像内の圃場を30個の区域に分け、該区域毎に前記旧検量線及び新検量線にて作物の葉身窒素含有率を演算し、演算して求めた値と、30個の前記区域の化学分析値とを用いて、比較を行った。その結果を、図4〜図9と、表2とに示す。
【0061】
【表2】
【0062】
図4〜図6は、新検量線を使用した場合で、図4は晴天時、図5は曇天時、そして図6は雲ムラ時の測定精度をそれぞれ示した図である。図7〜図9は、旧検量線を使用した場合で、図7は晴天時、図8は曇天時、そして図9は雲ムラ時の測定精度をそれぞれ示した図である。図4〜図9は、それぞれ横軸に化学分析値、縦軸に演算値をとったグラフである。
【0063】
表2には、晴天時の画像S、曇天時の画像D及び雲ムラ時の画像Cについて、それぞれ旧検量線及び新検量線で演算した値と、化学分析値との相関係数及び標準誤差(SEP)が示されている。表2によれば、晴天時及び曇天時については、旧検量線と新検量線とで、大きな差異はない。しかし、雲ムラ時には、旧検量線の相関係数が0.779、標準誤差が0.314と測定精度が低下しているのに対し、新検量線の相関係数は0.942、標準誤差0.084であり、晴天時及び曇天時と同等以上の測定精度であった。このため、新検量線は、雲ムラ状態であっても十分に使用することが可能であるといえる。
【実施例2】
【0064】
本発明の検量線の作成方法においては、下記の数式5に示すように、R(赤)信号の反射光の情報、G(緑)信号の反射光の情報及びB(青)信号の反射光の情報とNIR信号の反射光の情報との比の対数をとった重回帰式としてもよい。
【0065】
【数5】
【実施例3】
【0066】
また、本発明の検量線の作成方法においては、ダミー変数を使用せずに、単に、晴天時の画像データ、曇天時の画像データ及び雲ムラ時の画像データとを混合した画像データによって多変量解析を行って検量線を作成してもよい。この場合は、数式6、7又は8の何れかを使用すればよい。
【0067】
【数6】
【0068】
【数7】
【0069】
【数8】
【0070】
数式6〜数式8の何れかを用いて検量線を作成した場合には、ダミー変数を使用していないので、作成した検量線を使用する際にダミー変数を入力する必要はない。なお、バイアス成分については、測定装置21等によって別途求めてもよい。
【産業上の利用可能性】
【0071】
本発明の検量線の作成方法は、地上からの撮影の他、気球、ラジコン飛行装置(飛行機、ヘリ)又は有人飛行機等にカメラを搭載して圃場を撮影するリモートセンシングにおいても用いることが可能である。なお、地上からの撮影とは、地面から1m〜30mの高さから圃場を見下ろすようにカメラにて撮影することであって、遠方を撮影する場合には望遠レンズを使用することが望ましい。望遠レンズを使用することで、遠方を撮影した画像分まで解析時の分解能を確保することが可能となり、より広い範囲を一度に測定することができる。
【符号の説明】
【0072】
1 圃場
2 昇降装置
3 カメラ
4 トラック
20 データ処理装置
21 測定装置
【特許請求の範囲】
【請求項1】
圃場内の作物情報を算出するリモートセンシングにおいて、
圃場内の複数の区域に生育している作物からの反射光を、受光手段による撮影により前記区域毎に測定する工程と、
前記圃場内の作物の作物情報を、前記区域毎に化学分析等により求める工程と、
前記撮影により得た反射光の情報を説明変数、前記作物情報を目的変数とした、あらかじめ定めた重回帰式の重回帰係数を算出する工程とを含み、
前記測定は、前記圃場が照度均一状態及び雲ムラ状態である両方の状態において行い、それぞれの状態での前記反射光の情報を前記説明変数に用いることを特徴とする検量線の作成方法。
【請求項2】
請求項1に記載の検量線の作成方法において、照度均一状態及び雲ムラ状態をダミー変数として用いることを特徴とする検量線の作成方法。
【請求項3】
前記照度均一状態が、晴天時又は/及び曇天時であって、前記雲ムラ状態が、雲の影が撮影する圃場内に部分的に混在する状態であることを特徴とする請求項1又は2に記載の検量線の作成方法。
【請求項4】
請求項1乃至3に記載の作成方法により作成した検量線にて作物の作物情報を演算するリモートセンシングにおいて、
圃場内に生育している作物からの反射光を、カメラによる撮影により測定する工程と、
前記検量線の定数項又は/及びダミー変数の係数を0とした仮検量線に、前記撮影により得た反射光の情報を適用して、前記圃場内の一定面積の区域に生育している作物の第1の作物情報を演算する工程と、
作物の葉身に光を直接照射する方法によって前記区域に生育している作物の第2の作物情報を測定する工程と、
前記第1の作物情報と前記第2の作物情報との差を算出する工程とを含み、
前記差を前記仮検量線の定数項の値としたものを検量線とすることを特徴とする検量線の作成方法。
【請求項5】
請求項1乃至4に記載の検量線の作成方法で作成した検量線を使用することを特徴とするリモートセンシングによる作物の測定方法。
【請求項1】
圃場内の作物情報を算出するリモートセンシングにおいて、
圃場内の複数の区域に生育している作物からの反射光を、受光手段による撮影により前記区域毎に測定する工程と、
前記圃場内の作物の作物情報を、前記区域毎に化学分析等により求める工程と、
前記撮影により得た反射光の情報を説明変数、前記作物情報を目的変数とした、あらかじめ定めた重回帰式の重回帰係数を算出する工程とを含み、
前記測定は、前記圃場が照度均一状態及び雲ムラ状態である両方の状態において行い、それぞれの状態での前記反射光の情報を前記説明変数に用いることを特徴とする検量線の作成方法。
【請求項2】
請求項1に記載の検量線の作成方法において、照度均一状態及び雲ムラ状態をダミー変数として用いることを特徴とする検量線の作成方法。
【請求項3】
前記照度均一状態が、晴天時又は/及び曇天時であって、前記雲ムラ状態が、雲の影が撮影する圃場内に部分的に混在する状態であることを特徴とする請求項1又は2に記載の検量線の作成方法。
【請求項4】
請求項1乃至3に記載の作成方法により作成した検量線にて作物の作物情報を演算するリモートセンシングにおいて、
圃場内に生育している作物からの反射光を、カメラによる撮影により測定する工程と、
前記検量線の定数項又は/及びダミー変数の係数を0とした仮検量線に、前記撮影により得た反射光の情報を適用して、前記圃場内の一定面積の区域に生育している作物の第1の作物情報を演算する工程と、
作物の葉身に光を直接照射する方法によって前記区域に生育している作物の第2の作物情報を測定する工程と、
前記第1の作物情報と前記第2の作物情報との差を算出する工程とを含み、
前記差を前記仮検量線の定数項の値としたものを検量線とすることを特徴とする検量線の作成方法。
【請求項5】
請求項1乃至4に記載の検量線の作成方法で作成した検量線を使用することを特徴とするリモートセンシングによる作物の測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−27600(P2011−27600A)
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願番号】特願2009−174793(P2009−174793)
【出願日】平成21年7月27日(2009.7.27)
【出願人】(000001812)株式会社サタケ (223)
【Fターム(参考)】
【公開日】平成23年2月10日(2011.2.10)
【国際特許分類】
【出願日】平成21年7月27日(2009.7.27)
【出願人】(000001812)株式会社サタケ (223)
【Fターム(参考)】
[ Back to top ]