
リモートフィールド渦電流探傷システムおよびリモートフィールド渦電流探傷方法
【課題】曲管部におけるノイズを低減して欠陥検出性能を向上できるリモートフィールド渦電流探傷システムおよびリモートフィールド渦電流探傷方法を提供する。
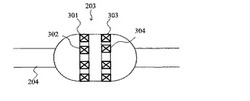
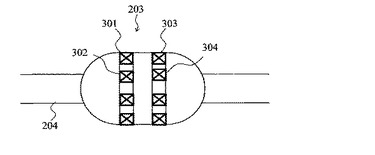
【解決手段】検出コイル203は大径の外側コイル301と小径の内側コイル302を同心軸上で2層構造とし、同構造のコイル303,304を軸方向に2列配置した構造である。2個の外側コイル301,303は相互に差動結線され、2個の内側コイル302,304も同様に差動結線されている。
欠陥が無い場合、行列Aによる変換後のX2・Y2信号はX1・Y1信号と同じになり(ステップ1)、差分演算をすると零になる(ステップ2)。一方、欠陥がある場合、行列Aによる変換後のX2・Y2信号はX1・Y1信号と同じにならず(ステップ1)、差分演算をすると(ステップ2)、X3・Y3信号が出力される。更に行列Bにより欠陥のサイズを示すX・Y信号が出力される。
【解決手段】検出コイル203は大径の外側コイル301と小径の内側コイル302を同心軸上で2層構造とし、同構造のコイル303,304を軸方向に2列配置した構造である。2個の外側コイル301,303は相互に差動結線され、2個の内側コイル302,304も同様に差動結線されている。
欠陥が無い場合、行列Aによる変換後のX2・Y2信号はX1・Y1信号と同じになり(ステップ1)、差分演算をすると零になる(ステップ2)。一方、欠陥がある場合、行列Aによる変換後のX2・Y2信号はX1・Y1信号と同じにならず(ステップ1)、差分演算をすると(ステップ2)、X3・Y3信号が出力される。更に行列Bにより欠陥のサイズを示すX・Y信号が出力される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、1つ以上の励磁コイルと2つ以上の検出コイルを有するプローブを用いたリモートフィールド渦電流探傷システムおよびリモートフィールド渦電流探傷方法に関する。
【背景技術】
【0002】
発電プラントの熱交換器には、多数の磁性伝熱管が規則的に配列されている。磁性伝熱管はU字形状で、長さ数メートルの直管部と各種曲率の曲管部をもつ。曲管部は直管を曲げ加工した部分で、各種曲率での形状変化と管自体に扁平をもつ。
【0003】
磁性伝熱管の検査方法の1つにリモートフィールド渦電流探傷方法が知られている。励磁コイルと検出コイルを離して配置するプローブ構造を特徴とする。励磁コイルと検出コイルを離して配置するため、励磁コイルによる直接磁場は検出コイルにまで届かず、磁性伝熱管に拡がった渦電流による微弱な間接磁場のみを検出できる。
【0004】
その一方で、1つの欠陥に対して、励磁コイルと検出コイルそれぞれの位置で影響を受けるため、2つの欠陥信号が探傷波形に観測される。管軸方向に複数の欠陥がある場合、探傷波形が重なりあり、強め合ったり打ち消しあったりし、複雑な波形となり、欠陥が検出しにくくなる。
【0005】
このような課題に対して、各種プローブが提案されてきた。例えば、特許文献1では、探傷すべき鋼管内に、2個の検出コイルを隣り合うように近接して配列するとともに、これを差動的に接続し、検出コイルに対して離隔した励磁コイルを鋼管内の所望の位置に配置するリモートフィールド渦電流探傷システムが提案されている。
【0006】
これにより、励磁コイルの影響による波形は差動出力が零となり、検出コイルの影響による波形のみが検出され、探傷信号が見分けやすくなる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭64−35261号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
さらに、特許文献1記載のプローブは、励磁コイルと検出コイルをフレキシブルに連結しており、これによりU字管の曲部に挿入しやすくなる。
【0009】
しかし、特許文献1記載のプローブによるリモートフィールド渦電流探傷では、U字形状管の曲部での探傷信号に曲げ形状に起因するノイズが混じり、欠陥が検出しにくくなる。
【0010】
すなわち、1つの励磁コイルと2つの検出コイルとは、管軸方向に略平行に配列されており、管直線部ではこの配置が維持されるが、曲部では曲げ形状に従って、この配置(コイル間距離や角度)が変化する。曲率が小さい(曲率半径が大きい)場合は、検出誤差と捉えることができるが、曲率が大きく(曲率半径が小さく)なるに従って、曲げ形状に起因するノイズは無視できなくなる。
【0011】
なお、検査対象管と同じ曲率であって無欠陥の試験管の曲管部において、予めノイズを取得し、検出信号より差分することにより、理論上、ノイズを除去できるが、差分するには走査速度や検査位置を正確に一致させる必要があり、現実的に適用困難である。
【0012】
本発明の目的は、曲管部におけるノイズを低減して欠陥検出性能を向上できるリモートフィールド渦電流探傷システムおよびリモートフィールド渦電流探傷方法を提供することである。
【課題を解決するための手段】
【0013】
(1)上記目的を達成するために、本発明は、少なくとも1つの励磁コイルと、前記励磁コイルから離れた位置に配置され、近接して配列される第1検出コイルと第2コイルとを含む検出コイルとを有するプローブと、前記プローブが磁性管内を走査するときの前記第1検出コイルと第2コイルの出力電圧を位相検波して探傷信号を得る演算処理装置とを備えたリモートフィールド渦電流探傷システムにおいて、前記第1検出コイルは、第1内側検出コイルと、この第1内側検出コイルの同心軸上でこの第1内側検出コイルの外側に配置される第1外側検出コイルを有し、前記第2検出コイルは、第2内側検出コイルと、この第2内側検出コイルの同心軸上でこの第2内側検出コイルの外側に配置される第2外側検出コイルを有し、前記第1外側検出コイルと第2外側検出コイルは相互に差動結線され、前記第1内側検出コイルと第2内側検出コイルは相互に差動結線されているものとする。
【0014】
第1外側検出コイルと第2外側検出コイルとの差動出力と、第1内側検出コイルと第2内側検出コイルとの差動出力の間に、内外間差が生じる。被検出部に欠陥が無い場合には、管の曲率一定ならばこの内外間差は一定であるが、被検出部に欠陥がある場合には、この内外間差が変化する。この変化を探傷信号として検出することにより、欠陥を検出できる。
【0015】
(2)上記(1)において、好ましくは、 前記演算処理装置は、被検出部に欠陥が無い場合に前記第1外側検出コイルと第2外側検出コイルとの差動出力である第1信号と前記第1内側検出コイルと第2内側検出コイルとの差動出力である第2信号とが同じになるように、前記第1信号および前記第2信号のうち少なくとも一方を調整する第1機能部と、前記第1機能部で調整された第1信号と第2信号とを比較し差を求める第2機能部と、前記第2機能部で得られた信号を欠陥のサイズをもとめるように修正する第3機能部とを有するものとする。
【0016】
被検出部に欠陥が無い場合、第1機能部による演算後の第1信号と第2信号とが同じになり、第2機能部による演算結果は、零になる。一方、被検出部に欠陥がある場合、第1機能部による演算後の第1信号と第2信号とが同じにならず、第2機能部による演算結果が出力され、第3機能部により欠陥のサイズを示す探傷信号が出力される。
【0017】
これにより、より明瞭な探傷信号を検出することができ、曲管部における欠陥検出性能を向上できる。
【0018】
(3)上記(1)において、好ましくは、U字形状の磁性管の曲部を探傷対象とするものとする。
【0019】
(4)上記目的を達成するために、本発明は、少なくとも1つの励磁コイルと、前記励磁コイルから離れた位置に配置され、近接して配列される第1検出コイルと第2コイルとを含む検出コイルとを有するプローブに磁性管内を走査させ、前記第1検出コイルと第2コイルの出力電圧を位相検波して探傷信号を得るリモートフィールド渦電流探傷方法において、前記第1検出コイルは、第1内側検出コイルと、この第1内側検出コイルの同心軸上でこの第1内側検出コイルの外側に配置される第1外側検出コイルを有し、前記第2検出コイルは、第2内側検出コイルと、この第2内側検出コイルの同心軸上でこの第2内側検出コイルの外側に配置される第2外側検出コイルを有し、前記第1外側検出コイルと第2外側検出コイルは相互に差動結線され、前記第1内側検出コイルと第2内側検出コイルは相互に差動結線されており、被検出部に欠陥が無い場合に前記第1外側検出コイルと第2外側検出コイルとの差動出力である第1信号と前記第1内側検出コイルと第2内側検出コイルとの差動出力である第2信号とが同じになるように、前記第1信号および前記第2信号のうち少なくとも一方を調整する第1ステップと、前記第1ステップで調整された第1信号と第2信号とを比較し差を求める第2ステップと、前記第2ステップで得られた信号を欠陥のサイズをもとめるように修正する第3ステップとを備えるものとする。
【発明の効果】
【0020】
本発明によれば、曲管部におけるノイズを低減して欠陥検出性能を向上できる。
【図面の簡単な説明】
【0021】
【図1】リモートフィールド渦電流探傷システムの全体構成図である。
【図2】プローブの概略構成図である。
【図3】検出コイルの概略構成図である。
【図4】演算処理装置の機能ブロック図である。
【図5A】検査対象管の概略図である。
【図5B】従来技術による探傷結果である。
【図5C】本実施形態による探傷結果である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態を図面を用いて説明する。
【0023】
〜構成〜
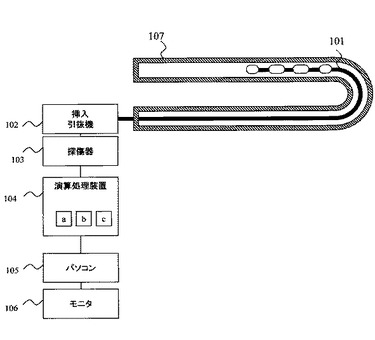
図1は、リモートフィールド渦電流探傷システムの全体構成図である。リモートフィールド渦電流探傷システムは、プローブ101、挿入引抜機102、探傷器103、演算処理装置104、パソコン105、モニタ106により構成され、検査対象管107を探傷する。
【0024】
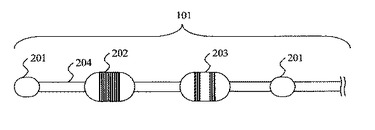
図2は、プローブ101の概略構成図である。プローブ101は、ガイド201、励磁コイル202、検出コイル203を可撓性のチューブ204で接続した構造である。ガイド201は滑らかな形状の部材である。励磁コイル202は導線を単層巻きした構造である。
【0025】
検出コイル203は本実施形態の特徴的な構成である。図3は、検出コイル203の概略構成図である。検出コイル203は大径の外側コイル301と小径の内側コイル302を同心軸上で2層構造とし、同構造のコイル303,304を軸方向に2列配置した構造である。2個の外側コイル301,303は相互に差動結線され、2個の内側コイル302,304も同様に差動結線されている。
【0026】
チューブ204は可撓性と大きな引張強度を持ち、座屈しにくい硬質材である。電気的には、プローブ101の励磁コイル202と検出コイル203の外側コイル301,303と内側コイル302,304はケーブルを介して探傷器103に接続される。探傷器103は演算処理装置104を介してパソコン105やモニタ106に接続される。
【0027】
プローブ101は、挿入引抜機102により検査対象管内の開始位置まで挿入され、励磁コイル301に電圧が印加された状態で、挿入引抜機102よりプローブ入口側から引き抜きかれる。その際、探傷器103は、検出コイル203の出力電圧を入力し、位相検波して探傷信号を取得する。探傷信号は1つの出力電圧に対して同相信号(X)と異相信号(Y)をもち、演算処理装置104に送られる。演算処理装置104は下記の演算処理をおこない、パソコン105は、その結果をモニタ106に表示する。
【0028】
〜制御〜
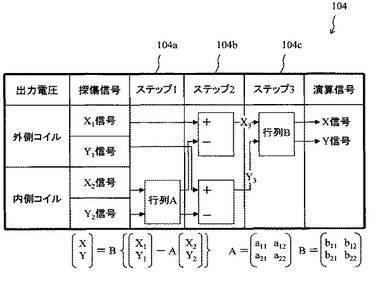
つぎに、演算処理装置104による演算処理について説明する。図4は、演算処理装置104の機能ブロック図である。演算処理装置104は第1機能部104aと第2機能部104bと第3機能部104cとを有している。
【0029】
プローブ101から得られる探傷信号は4つある。外側コイル301と外側コイル303との差動出力であるX1信号およびY1信号と、内側コイル302と内側コイル304との差動出力であるX2信号およびY2信号である。それぞれの探傷信号は同時刻或いは同位置での値である。
【0030】
第1機能部104aは、X2信号とY2信号を行列A(要素a11、a12、a21、a22)により行列変換する(ステップ1)。行列Aは、被検出部に欠陥が無い場合のX2信号とY2信号をX1信号とY1信号と同じになるように探傷前に予め設定されている。校正試験から設定することもできるし、特定の数値を入力することもできる。校正試験から設定する場合、検査対象管と同じ曲率であって無欠陥の試験管の曲管部において、X1信号およびY1信号とX2信号およびY2信号を取得し、上記条件を満たす行列Aを設定する。ここで、行列Aは曲率ごとに設定される。
【0031】
なお、X1信号とY1信号を行列変換して、X2信号とY2信号と同じになるように調整しても良い。
【0032】
第2機能部104bは、X1信号およびY1信号と、行列Aによる変換後のX2信号およびY2信号との差分演算を行なう(ステップ2)。
【0033】
被検出部に欠陥が無い場合、行列Aによる変換後のX2信号およびY2信号はX1信号とY1信号と同じになり(ステップ1)、差分演算をすると、零になる(ステップ2)。一方、被検出部に欠陥がある場合、行列Aによる変換後のX2信号およびY2信号はX1信号とY1信号と同じにならず(ステップ1)、差分演算をすると(ステップ2)、零にならず、X3信号およびY3信号が出力される。
【0034】
第3機能部104cは、X3信号とY3信号を行列B(要素b11、b12、b21、b22)により行列変換する(ステップ3)。行列Bは、X3信号とY3信号を欠陥のサイズを示すX信号とY信号に修正するように探傷前に予め設定されている。行列Aの条件の下、模擬欠陥(例えばφ1mm穴)付与の試験管で探傷して、X信号及びY信号が目的の振幅となるように行列Bの要素を設定する。行列Bは行列Aに対応して設定される。
【0035】
被検出部に欠陥が無い場合、X3信号とY3信号は零であり、行列Bによる変換後のX信号およびY信号も零になる(ステップ3)。一方、被検出部に欠陥がある場合、行列Bにより、欠陥のサイズを示すX信号とY信号が出力される(ステップ3)。
【0036】
〜効果〜
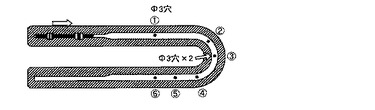
本実施形態の効果を具体例を用いて説明する。図5Aは検査対象管の概略図であり、曲率45mmの磁性伝熱管で、複数個のφ3mm貫通穴が付与されている。なお、No.3の欠陥は、裏と表の2箇所の穴が付与されている。
【0037】
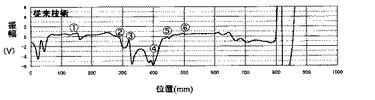
図5Bは、従来技術(励磁コイル1つ,検出コイル2つ)によるY信号の探傷結果である。従来技術においては、曲管部における欠陥検出性能が良くないという課題があった。たとえば、曲管部であるNo.2〜4の欠陥における探傷信号は特に、不明瞭である。
【0038】
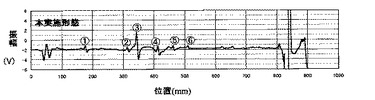
図5Cは、本実施形態(励磁コイル1つ,検出コイル2×2)による探傷結果である。行列Aの要素a11=a22=1.8、a12=a21=0とし、行列Bの要素b11=b22=10.3、b12=b21=0として、励磁周波数f=1kHzでのY信号の探傷結果を示す。曲管部での曲げ形状ノイズは低減され、φ3mm貫通穴からの探傷信号が明瞭に検出される。特に、No.3の欠陥では、振幅が他の欠陥より大きくなっている。これにより曲管部における欠陥検出性能を向上できる。
【符号の説明】
【0039】
101 プローブ
102 挿入引抜機
103 探傷器
104 演算処理装置
104a 第1機能部
104b 第2機能部
104c 第3機能部
105 パソコン
106 モニタ
107 検査対象管
201 ガイド
202 励磁コイル
203 検出コイル
204 可撓性チューブ
301 外側コイル(第1外側検出コイル)
302 内側コイル(第1内側検出コイル)
303 外側コイル(第2外側検出コイル)
304 内側コイル(第2内側検出コイル)
【技術分野】
【0001】
本発明は、1つ以上の励磁コイルと2つ以上の検出コイルを有するプローブを用いたリモートフィールド渦電流探傷システムおよびリモートフィールド渦電流探傷方法に関する。
【背景技術】
【0002】
発電プラントの熱交換器には、多数の磁性伝熱管が規則的に配列されている。磁性伝熱管はU字形状で、長さ数メートルの直管部と各種曲率の曲管部をもつ。曲管部は直管を曲げ加工した部分で、各種曲率での形状変化と管自体に扁平をもつ。
【0003】
磁性伝熱管の検査方法の1つにリモートフィールド渦電流探傷方法が知られている。励磁コイルと検出コイルを離して配置するプローブ構造を特徴とする。励磁コイルと検出コイルを離して配置するため、励磁コイルによる直接磁場は検出コイルにまで届かず、磁性伝熱管に拡がった渦電流による微弱な間接磁場のみを検出できる。
【0004】
その一方で、1つの欠陥に対して、励磁コイルと検出コイルそれぞれの位置で影響を受けるため、2つの欠陥信号が探傷波形に観測される。管軸方向に複数の欠陥がある場合、探傷波形が重なりあり、強め合ったり打ち消しあったりし、複雑な波形となり、欠陥が検出しにくくなる。
【0005】
このような課題に対して、各種プローブが提案されてきた。例えば、特許文献1では、探傷すべき鋼管内に、2個の検出コイルを隣り合うように近接して配列するとともに、これを差動的に接続し、検出コイルに対して離隔した励磁コイルを鋼管内の所望の位置に配置するリモートフィールド渦電流探傷システムが提案されている。
【0006】
これにより、励磁コイルの影響による波形は差動出力が零となり、検出コイルの影響による波形のみが検出され、探傷信号が見分けやすくなる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭64−35261号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
さらに、特許文献1記載のプローブは、励磁コイルと検出コイルをフレキシブルに連結しており、これによりU字管の曲部に挿入しやすくなる。
【0009】
しかし、特許文献1記載のプローブによるリモートフィールド渦電流探傷では、U字形状管の曲部での探傷信号に曲げ形状に起因するノイズが混じり、欠陥が検出しにくくなる。
【0010】
すなわち、1つの励磁コイルと2つの検出コイルとは、管軸方向に略平行に配列されており、管直線部ではこの配置が維持されるが、曲部では曲げ形状に従って、この配置(コイル間距離や角度)が変化する。曲率が小さい(曲率半径が大きい)場合は、検出誤差と捉えることができるが、曲率が大きく(曲率半径が小さく)なるに従って、曲げ形状に起因するノイズは無視できなくなる。
【0011】
なお、検査対象管と同じ曲率であって無欠陥の試験管の曲管部において、予めノイズを取得し、検出信号より差分することにより、理論上、ノイズを除去できるが、差分するには走査速度や検査位置を正確に一致させる必要があり、現実的に適用困難である。
【0012】
本発明の目的は、曲管部におけるノイズを低減して欠陥検出性能を向上できるリモートフィールド渦電流探傷システムおよびリモートフィールド渦電流探傷方法を提供することである。
【課題を解決するための手段】
【0013】
(1)上記目的を達成するために、本発明は、少なくとも1つの励磁コイルと、前記励磁コイルから離れた位置に配置され、近接して配列される第1検出コイルと第2コイルとを含む検出コイルとを有するプローブと、前記プローブが磁性管内を走査するときの前記第1検出コイルと第2コイルの出力電圧を位相検波して探傷信号を得る演算処理装置とを備えたリモートフィールド渦電流探傷システムにおいて、前記第1検出コイルは、第1内側検出コイルと、この第1内側検出コイルの同心軸上でこの第1内側検出コイルの外側に配置される第1外側検出コイルを有し、前記第2検出コイルは、第2内側検出コイルと、この第2内側検出コイルの同心軸上でこの第2内側検出コイルの外側に配置される第2外側検出コイルを有し、前記第1外側検出コイルと第2外側検出コイルは相互に差動結線され、前記第1内側検出コイルと第2内側検出コイルは相互に差動結線されているものとする。
【0014】
第1外側検出コイルと第2外側検出コイルとの差動出力と、第1内側検出コイルと第2内側検出コイルとの差動出力の間に、内外間差が生じる。被検出部に欠陥が無い場合には、管の曲率一定ならばこの内外間差は一定であるが、被検出部に欠陥がある場合には、この内外間差が変化する。この変化を探傷信号として検出することにより、欠陥を検出できる。
【0015】
(2)上記(1)において、好ましくは、 前記演算処理装置は、被検出部に欠陥が無い場合に前記第1外側検出コイルと第2外側検出コイルとの差動出力である第1信号と前記第1内側検出コイルと第2内側検出コイルとの差動出力である第2信号とが同じになるように、前記第1信号および前記第2信号のうち少なくとも一方を調整する第1機能部と、前記第1機能部で調整された第1信号と第2信号とを比較し差を求める第2機能部と、前記第2機能部で得られた信号を欠陥のサイズをもとめるように修正する第3機能部とを有するものとする。
【0016】
被検出部に欠陥が無い場合、第1機能部による演算後の第1信号と第2信号とが同じになり、第2機能部による演算結果は、零になる。一方、被検出部に欠陥がある場合、第1機能部による演算後の第1信号と第2信号とが同じにならず、第2機能部による演算結果が出力され、第3機能部により欠陥のサイズを示す探傷信号が出力される。
【0017】
これにより、より明瞭な探傷信号を検出することができ、曲管部における欠陥検出性能を向上できる。
【0018】
(3)上記(1)において、好ましくは、U字形状の磁性管の曲部を探傷対象とするものとする。
【0019】
(4)上記目的を達成するために、本発明は、少なくとも1つの励磁コイルと、前記励磁コイルから離れた位置に配置され、近接して配列される第1検出コイルと第2コイルとを含む検出コイルとを有するプローブに磁性管内を走査させ、前記第1検出コイルと第2コイルの出力電圧を位相検波して探傷信号を得るリモートフィールド渦電流探傷方法において、前記第1検出コイルは、第1内側検出コイルと、この第1内側検出コイルの同心軸上でこの第1内側検出コイルの外側に配置される第1外側検出コイルを有し、前記第2検出コイルは、第2内側検出コイルと、この第2内側検出コイルの同心軸上でこの第2内側検出コイルの外側に配置される第2外側検出コイルを有し、前記第1外側検出コイルと第2外側検出コイルは相互に差動結線され、前記第1内側検出コイルと第2内側検出コイルは相互に差動結線されており、被検出部に欠陥が無い場合に前記第1外側検出コイルと第2外側検出コイルとの差動出力である第1信号と前記第1内側検出コイルと第2内側検出コイルとの差動出力である第2信号とが同じになるように、前記第1信号および前記第2信号のうち少なくとも一方を調整する第1ステップと、前記第1ステップで調整された第1信号と第2信号とを比較し差を求める第2ステップと、前記第2ステップで得られた信号を欠陥のサイズをもとめるように修正する第3ステップとを備えるものとする。
【発明の効果】
【0020】
本発明によれば、曲管部におけるノイズを低減して欠陥検出性能を向上できる。
【図面の簡単な説明】
【0021】
【図1】リモートフィールド渦電流探傷システムの全体構成図である。
【図2】プローブの概略構成図である。
【図3】検出コイルの概略構成図である。
【図4】演算処理装置の機能ブロック図である。
【図5A】検査対象管の概略図である。
【図5B】従来技術による探傷結果である。
【図5C】本実施形態による探傷結果である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態を図面を用いて説明する。
【0023】
〜構成〜
図1は、リモートフィールド渦電流探傷システムの全体構成図である。リモートフィールド渦電流探傷システムは、プローブ101、挿入引抜機102、探傷器103、演算処理装置104、パソコン105、モニタ106により構成され、検査対象管107を探傷する。
【0024】
図2は、プローブ101の概略構成図である。プローブ101は、ガイド201、励磁コイル202、検出コイル203を可撓性のチューブ204で接続した構造である。ガイド201は滑らかな形状の部材である。励磁コイル202は導線を単層巻きした構造である。
【0025】
検出コイル203は本実施形態の特徴的な構成である。図3は、検出コイル203の概略構成図である。検出コイル203は大径の外側コイル301と小径の内側コイル302を同心軸上で2層構造とし、同構造のコイル303,304を軸方向に2列配置した構造である。2個の外側コイル301,303は相互に差動結線され、2個の内側コイル302,304も同様に差動結線されている。
【0026】
チューブ204は可撓性と大きな引張強度を持ち、座屈しにくい硬質材である。電気的には、プローブ101の励磁コイル202と検出コイル203の外側コイル301,303と内側コイル302,304はケーブルを介して探傷器103に接続される。探傷器103は演算処理装置104を介してパソコン105やモニタ106に接続される。
【0027】
プローブ101は、挿入引抜機102により検査対象管内の開始位置まで挿入され、励磁コイル301に電圧が印加された状態で、挿入引抜機102よりプローブ入口側から引き抜きかれる。その際、探傷器103は、検出コイル203の出力電圧を入力し、位相検波して探傷信号を取得する。探傷信号は1つの出力電圧に対して同相信号(X)と異相信号(Y)をもち、演算処理装置104に送られる。演算処理装置104は下記の演算処理をおこない、パソコン105は、その結果をモニタ106に表示する。
【0028】
〜制御〜
つぎに、演算処理装置104による演算処理について説明する。図4は、演算処理装置104の機能ブロック図である。演算処理装置104は第1機能部104aと第2機能部104bと第3機能部104cとを有している。
【0029】
プローブ101から得られる探傷信号は4つある。外側コイル301と外側コイル303との差動出力であるX1信号およびY1信号と、内側コイル302と内側コイル304との差動出力であるX2信号およびY2信号である。それぞれの探傷信号は同時刻或いは同位置での値である。
【0030】
第1機能部104aは、X2信号とY2信号を行列A(要素a11、a12、a21、a22)により行列変換する(ステップ1)。行列Aは、被検出部に欠陥が無い場合のX2信号とY2信号をX1信号とY1信号と同じになるように探傷前に予め設定されている。校正試験から設定することもできるし、特定の数値を入力することもできる。校正試験から設定する場合、検査対象管と同じ曲率であって無欠陥の試験管の曲管部において、X1信号およびY1信号とX2信号およびY2信号を取得し、上記条件を満たす行列Aを設定する。ここで、行列Aは曲率ごとに設定される。
【0031】
なお、X1信号とY1信号を行列変換して、X2信号とY2信号と同じになるように調整しても良い。
【0032】
第2機能部104bは、X1信号およびY1信号と、行列Aによる変換後のX2信号およびY2信号との差分演算を行なう(ステップ2)。
【0033】
被検出部に欠陥が無い場合、行列Aによる変換後のX2信号およびY2信号はX1信号とY1信号と同じになり(ステップ1)、差分演算をすると、零になる(ステップ2)。一方、被検出部に欠陥がある場合、行列Aによる変換後のX2信号およびY2信号はX1信号とY1信号と同じにならず(ステップ1)、差分演算をすると(ステップ2)、零にならず、X3信号およびY3信号が出力される。
【0034】
第3機能部104cは、X3信号とY3信号を行列B(要素b11、b12、b21、b22)により行列変換する(ステップ3)。行列Bは、X3信号とY3信号を欠陥のサイズを示すX信号とY信号に修正するように探傷前に予め設定されている。行列Aの条件の下、模擬欠陥(例えばφ1mm穴)付与の試験管で探傷して、X信号及びY信号が目的の振幅となるように行列Bの要素を設定する。行列Bは行列Aに対応して設定される。
【0035】
被検出部に欠陥が無い場合、X3信号とY3信号は零であり、行列Bによる変換後のX信号およびY信号も零になる(ステップ3)。一方、被検出部に欠陥がある場合、行列Bにより、欠陥のサイズを示すX信号とY信号が出力される(ステップ3)。
【0036】
〜効果〜
本実施形態の効果を具体例を用いて説明する。図5Aは検査対象管の概略図であり、曲率45mmの磁性伝熱管で、複数個のφ3mm貫通穴が付与されている。なお、No.3の欠陥は、裏と表の2箇所の穴が付与されている。
【0037】
図5Bは、従来技術(励磁コイル1つ,検出コイル2つ)によるY信号の探傷結果である。従来技術においては、曲管部における欠陥検出性能が良くないという課題があった。たとえば、曲管部であるNo.2〜4の欠陥における探傷信号は特に、不明瞭である。
【0038】
図5Cは、本実施形態(励磁コイル1つ,検出コイル2×2)による探傷結果である。行列Aの要素a11=a22=1.8、a12=a21=0とし、行列Bの要素b11=b22=10.3、b12=b21=0として、励磁周波数f=1kHzでのY信号の探傷結果を示す。曲管部での曲げ形状ノイズは低減され、φ3mm貫通穴からの探傷信号が明瞭に検出される。特に、No.3の欠陥では、振幅が他の欠陥より大きくなっている。これにより曲管部における欠陥検出性能を向上できる。
【符号の説明】
【0039】
101 プローブ
102 挿入引抜機
103 探傷器
104 演算処理装置
104a 第1機能部
104b 第2機能部
104c 第3機能部
105 パソコン
106 モニタ
107 検査対象管
201 ガイド
202 励磁コイル
203 検出コイル
204 可撓性チューブ
301 外側コイル(第1外側検出コイル)
302 内側コイル(第1内側検出コイル)
303 外側コイル(第2外側検出コイル)
304 内側コイル(第2内側検出コイル)
【特許請求の範囲】
【請求項1】
少なくとも1つの励磁コイルと、
前記励磁コイルから離れた位置に配置され、近接して配列される第1検出コイルと第2コイルとを含む検出コイルと
を有するプローブと、
前記プローブが磁性管内を走査するときの前記第1検出コイルと第2コイルの出力電圧を位相検波して探傷信号を得る演算処理装置と
を備えたリモートフィールド渦電流探傷システムにおいて、
前記第1検出コイルは、第1内側検出コイルと、この第1内側検出コイルの同心軸上でこの第1内側検出コイルの外側に配置される第1外側検出コイルを有し、
前記第2検出コイルは、第2内側検出コイルと、この第2内側検出コイルの同心軸上でこの第2内側検出コイルの外側に配置される第2外側検出コイルを有し、
前記第1外側検出コイルと第2外側検出コイルは相互に差動結線され、
前記第1内側検出コイルと第2内側検出コイルは相互に差動結線されている
ことを特徴とするリモートフィールド渦電流探傷システム。
【請求項2】
請求項1記載のリモートフィールド渦電流探傷システムにおいて、
前記演算処理装置は、
被検出部に欠陥が無い場合に前記第1外側検出コイルと第2外側検出コイルとの差動出力である第1信号と前記第1内側検出コイルと第2内側検出コイルとの差動出力である第2信号とが同じになるように、前記第1信号および前記第2信号のうち少なくとも一方を調整する第1機能部と、
前記第1機能部で調整された第1信号と第2信号とを比較し差を求める第2機能部と、
前記第2機能部で得られた信号を欠陥のサイズをもとめるように修正する第3機能部と
を有することを特徴とするリモートフィールド渦電流探傷システム。
【請求項3】
請求項1記載のリモートフィールド渦電流探傷システムは、
U字形状の磁性管の曲部を探傷対象とする
ことを特徴とするリモートフィールド渦電流探傷システム。
【請求項4】
少なくとも1つの励磁コイルと、前記励磁コイルから離れた位置に配置され、近接して配列される第1検出コイルと第2コイルとを含む検出コイルとを有するプローブに磁性管内を走査させ、前記第1検出コイルと第2コイルの出力電圧を位相検波して探傷信号を得るリモートフィールド渦電流探傷方法において、
前記第1検出コイルは、第1内側検出コイルと、この第1内側検出コイルの同心軸上でこの第1内側検出コイルの外側に配置される第1外側検出コイルを有し、
前記第2検出コイルは、第2内側検出コイルと、この第2内側検出コイルの同心軸上でこの第2内側検出コイルの外側に配置される第2外側検出コイルを有し、
前記第1外側検出コイルと第2外側検出コイルは相互に差動結線され、
前記第1内側検出コイルと第2内側検出コイルは相互に差動結線されており、
被検出部に欠陥が無い場合に前記第1外側検出コイルと第2外側検出コイルとの差動出力である第1信号と前記第1内側検出コイルと第2内側検出コイルとの差動出力である第2信号とが同じになるように、前記第1信号および前記第2信号のうち少なくとも一方を調整する第1ステップと、
前記第1ステップで調整された第1信号と第2信号とを比較し差を求める第2ステップと、
前記第2ステップで得られた信号を欠陥のサイズをもとめるように修正する第3ステップと
を備えることを特徴とするリモートフィールド渦電流探傷方法。
【請求項1】
少なくとも1つの励磁コイルと、
前記励磁コイルから離れた位置に配置され、近接して配列される第1検出コイルと第2コイルとを含む検出コイルと
を有するプローブと、
前記プローブが磁性管内を走査するときの前記第1検出コイルと第2コイルの出力電圧を位相検波して探傷信号を得る演算処理装置と
を備えたリモートフィールド渦電流探傷システムにおいて、
前記第1検出コイルは、第1内側検出コイルと、この第1内側検出コイルの同心軸上でこの第1内側検出コイルの外側に配置される第1外側検出コイルを有し、
前記第2検出コイルは、第2内側検出コイルと、この第2内側検出コイルの同心軸上でこの第2内側検出コイルの外側に配置される第2外側検出コイルを有し、
前記第1外側検出コイルと第2外側検出コイルは相互に差動結線され、
前記第1内側検出コイルと第2内側検出コイルは相互に差動結線されている
ことを特徴とするリモートフィールド渦電流探傷システム。
【請求項2】
請求項1記載のリモートフィールド渦電流探傷システムにおいて、
前記演算処理装置は、
被検出部に欠陥が無い場合に前記第1外側検出コイルと第2外側検出コイルとの差動出力である第1信号と前記第1内側検出コイルと第2内側検出コイルとの差動出力である第2信号とが同じになるように、前記第1信号および前記第2信号のうち少なくとも一方を調整する第1機能部と、
前記第1機能部で調整された第1信号と第2信号とを比較し差を求める第2機能部と、
前記第2機能部で得られた信号を欠陥のサイズをもとめるように修正する第3機能部と
を有することを特徴とするリモートフィールド渦電流探傷システム。
【請求項3】
請求項1記載のリモートフィールド渦電流探傷システムは、
U字形状の磁性管の曲部を探傷対象とする
ことを特徴とするリモートフィールド渦電流探傷システム。
【請求項4】
少なくとも1つの励磁コイルと、前記励磁コイルから離れた位置に配置され、近接して配列される第1検出コイルと第2コイルとを含む検出コイルとを有するプローブに磁性管内を走査させ、前記第1検出コイルと第2コイルの出力電圧を位相検波して探傷信号を得るリモートフィールド渦電流探傷方法において、
前記第1検出コイルは、第1内側検出コイルと、この第1内側検出コイルの同心軸上でこの第1内側検出コイルの外側に配置される第1外側検出コイルを有し、
前記第2検出コイルは、第2内側検出コイルと、この第2内側検出コイルの同心軸上でこの第2内側検出コイルの外側に配置される第2外側検出コイルを有し、
前記第1外側検出コイルと第2外側検出コイルは相互に差動結線され、
前記第1内側検出コイルと第2内側検出コイルは相互に差動結線されており、
被検出部に欠陥が無い場合に前記第1外側検出コイルと第2外側検出コイルとの差動出力である第1信号と前記第1内側検出コイルと第2内側検出コイルとの差動出力である第2信号とが同じになるように、前記第1信号および前記第2信号のうち少なくとも一方を調整する第1ステップと、
前記第1ステップで調整された第1信号と第2信号とを比較し差を求める第2ステップと、
前記第2ステップで得られた信号を欠陥のサイズをもとめるように修正する第3ステップと
を備えることを特徴とするリモートフィールド渦電流探傷方法。
【図1】


【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【公開番号】特開2013−113787(P2013−113787A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−262333(P2011−262333)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(390010973)日立交通テクノロジー株式会社 (20)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(390010973)日立交通テクノロジー株式会社 (20)
【Fターム(参考)】
[ Back to top ]