
リワーク装置
【課題】加熱や吸着するための作業部と部品との位置合わせ、作業部と基板との位置合わせなどを精度よく行うことができるリワーク装置を提供する。
【解決手段】作業ユニット20では、複数の作業部21〜24が予め定められた軌道T1に沿って一体的に動作して各作業部の位置が変更されることにより作業軸A上に配置される作業部が複数の作業部から選択される。観察部30は、作業軸Aを中心に回動可能な回動機構31と、回動機構31に支持され、回動機構31の回動に伴って作業軸Aを中心とする円弧軌道T2に沿って移動して作業ポイントPを観察する方向が変更される観察部本体32とを備えている。
【解決手段】作業ユニット20では、複数の作業部21〜24が予め定められた軌道T1に沿って一体的に動作して各作業部の位置が変更されることにより作業軸A上に配置される作業部が複数の作業部から選択される。観察部30は、作業軸Aを中心に回動可能な回動機構31と、回動機構31に支持され、回動機構31の回動に伴って作業軸Aを中心とする円弧軌道T2に沿って移動して作業ポイントPを観察する方向が変更される観察部本体32とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基板上に接合された電子部品を取り外す作業及び基板上に電子部品を取り付ける作業を行うためのリワーク装置に関するものである。
【背景技術】
【0002】
従来、基板に電子部品がはんだ付けされた電子回路基板において基板から不良部品を取り外し、その部位に新しい部品を取り付けるためのリワーク装置が知られている。近年の部品は、例えば0.6mm×0.3mmのサイズや0.4mm×0.2mmのサイズなどのように非常に微小なサイズを有している。したがって、部品の取り外し作業及び取り付け作業において、部品の位置などを肉眼により正確に判別するのは困難である。
【0003】
そこで、特許文献1には、肉眼では判別できない程の小さな部品を正確に保持し、基板上における実装部品の交換作業が容易に行えることを目的としたリワーク装置が開示されている。このリワーク装置は、撮影装置を備えている。この撮影装置では、基板取付台上の基板表面の画像と、保持具先端に保持された部品の画像とをともに撮影し、これらの画像を合成する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−228131号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のリワーク装置では、保持具先端に保持される部品と基板表面との位置合わせの精度が必ずしも高くない。
【0006】
そこで、本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、加熱や吸着するための作業部と部品との位置合わせ、作業部と基板との位置合わせなどを精度よく行うことができるリワーク装置を提供することにある。
【課題を解決するための手段】
【0007】
(1)本発明は、基板上に接合材によって接合された部品を取り外す作業及び前記基板上に部品を取り付ける作業を行うリワーク装置に関するものである。前記リワーク装置は、前記基板が作業軸と交わるように前記基板を保持する基板保持部と、前記部品を吸着する吸着作業部及び前記接合材を加熱する加熱作業部を含む複数の作業部を有する作業ユニットと、前記作業軸と前記基板とが交わる作業ポイントを拡大観察する観察部と、を備えている。前記作業ユニットでは、前記複数の作業部が予め定められた軌道に沿って一体的に動作して各作業部の位置が変更されることにより前記作業軸上に配置される作業部が前記複数の作業部から選択される。前記観察部は、前記作業軸を中心に回動可能な回動機構と、前記回動機構に支持され、前記回動機構の回動に伴って前記作業軸を中心とする円弧軌道に沿って移動して前記作業ポイントを観察する方向が変更される観察部本体と、を備えている。前記作業は単一の前記作業軸上において行われる。
【0008】
この構成では、部品の取り外し作業及び取り付け作業において、吸着作業部により部品を吸着して部品の配置及び移動を行うことができ、また、加熱作業部によりはんだなどの接合材を加熱溶融させて部品を基板上に接合し、又は部品を基板から取り外すことができる。また、作業ユニットでは、前記複数の作業部が予め定められた軌道に沿って一体的に動作して各作業部の位置が変更されることにより前記作業軸上に配置される作業部を前記複数の作業部から選択可能であるので、各作業の作業性に優れ、しかも複数の異なる作業工程(吸着工程、加熱工程など)を単一の装置により実現できる。
【0009】
また、この構成では、観察部によって作業ポイントを拡大観察しながら微小部品のリワーク作業を行うことができる。しかも、この観察部の観察部本体は、回動機構の回動に伴って前記円弧軌道に沿って移動して作業ポイントを観察する方向が変更される。すなわち、観察部本体を前記円弧軌道上の異なる位置に配置することができ、これらの位置において作業ポイントをそれぞれ観察することによって作業ポイントを異なった方向から観察できる。したがって、この構成では、加熱や吸着するための作業部と部品との位置合わせ、作業部と基板との位置合わせなどを精度よく行うことができる。
【0010】
(2)前記リワーク装置において、前記観察部本体は、前記作業ポイントを斜め上方から観察可能な姿勢で前記回動機構に支持されており、前記回動機構の回動に伴って斜め上方からの観察姿勢を維持しつつ前記円弧軌道に沿って移動して前記作業ポイントを観察する方向が変更されるのが好ましい。
【0011】
この構成では、観察部本体は、回動機構の回動に伴って斜め上方からの観察を維持しつつ前記円弧軌道に沿って移動するので、例えば水平方向に作業ポイントを観察する場合に比べて作業ポイントに位置する部品、基板、作業部及び接合材をより立体的に観察することができる。これにより、位置合わせの精度をより高めることができる。また、斜め上方からの観察であるので、基板上に供給される接合材の量や形状、部品が基板上に接合された後の接合材の形状(フィレット)などの接合材の状態を立体的に正確に判別することができる。
【0012】
(3)前記リワーク装置において、前記観察部は、前記観察部本体が前記作業ポイントを観察するときの水平方向に対する傾斜角度を変更可能な傾斜角度調節機構をさらに備えているのが好ましい。
【0013】
この構成では、傾斜角度の変更に伴って作業ポイントを観察する角度を変更することができる。
【0014】
(4)前記リワーク装置において、前記作業ユニットは、前記作業軸に平行な支軸と、前記支軸を中心に回動可能に前記支軸に支持されたユニット本体とをさらに有し、前記複数の作業部は、前記支軸を中心とする周方向に沿って互いに間隔をあけて配置された状態で前記ユニット本体に支持されており、前記ユニット本体の回動に伴って前記支軸を中心とする円軌道に沿って一体的に動作するのが好ましい。
【0015】
この構成では、ユニット本体を回動させることにより作業軸上に配置する作業部を選択できるので、例えば複数の作業部が一方向に直線状に配列され、この一方向の直線軌道に沿って複数の作業部を一体的に動作させる場合に比べて、複数の作業部を配置するのに必要なスペースが前記一方向に大きくなるのを抑制でき、コンパクト化を図ることができる。また、作業ユニットが作業軸と平行な支軸を中心に回動する構造であるので、この作業ユニットにその周方向に沿って複数の作業部を支持させれば、各作業部は、作業ユニットの回動時に必ず作業軸を通過する構成にすることができる。
【0016】
(5)前記リワーク装置において、前記作業ユニットは、前記作業軸上に配置される作業部の位置を前記作業軸方向に微調整する微調整機構をさらに有しているのが好ましい。この構成では、各作業部の位置をより精度よく調整できる。
【0017】
(6)前記リワーク装置において、前記基板上に取り付けるための部品が載置される部品テーブルをさらに備え、前記部品テーブルは、前記作業軸と交わる作業位置と、前記作業軸とは交わらない退避位置との間を移動可能であり、かつ前記作業位置において前記作業軸を中心に少なくとも90°回動可能であるのが好ましい。
【0018】
この構成では、退避位置において部品テーブル上に部品が載置され、この部品が作業位置において吸着作業部によって吸着される。この作業位置では、部品が吸着される前に、作業軸を中心に部品テーブルを少なくとも90°の範囲で回動させることができるので、吸着時の部品の向きを所望の向きに予め調節できる。
【0019】
(7)前記リワーク装置において、前記作業軸を通る光軸を有するレーザーポインタをさらに備えているのが好ましい。この構成では、レーザーポインタによっておおまかな作業軸を目視できるので、予め手作業によっておおまかな位置調整が可能となり、作業性がさらに向上する。
【0020】
(8)前記リワーク装置において、前記基板保持部に保持された前記基板を補助的に加熱するための補助加熱機構をさらに備えているのが好ましい。この構成では、補助加熱機構をさらに備えているので、加熱に要する時間を短縮できる。
【発明の効果】
【0021】
以上説明したように、本発明によれば、部品と基板と部品の吸着や接合材の加熱を行うための作業部とを精度よく位置合わせすることができ、しかも接合材の状態を正確に判別することができる。
【図面の簡単な説明】
【0022】
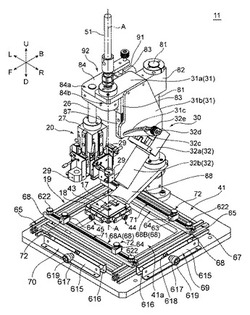
【図1】本発明の一実施形態に係るリワーク装置を斜め上方から見た状態を示す斜視図である。
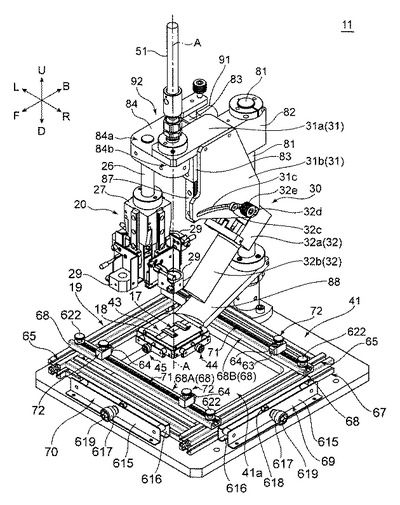
【図2】前記リワーク装置を背面側の斜め上方から見た状態を示す斜視図である。
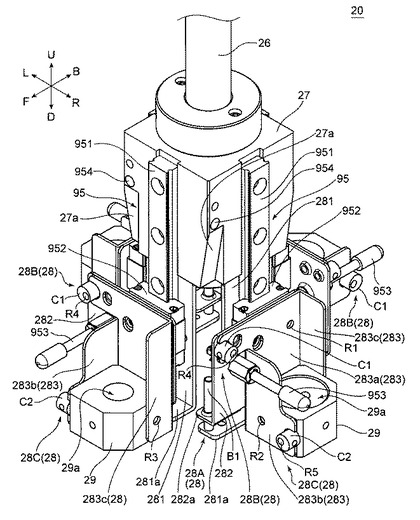
【図3】前記リワーク装置の作業ユニットを示す斜視図である。
【図4】(A)〜(E)は、前記作業ユニットの各作業部を示す図である。
【図5】前記リワーク装置の観察部の傾斜角度が調節される状態を示す側面図である。
【図6】前記リワーク装置の観察部が回動される状態を示す平面図である。
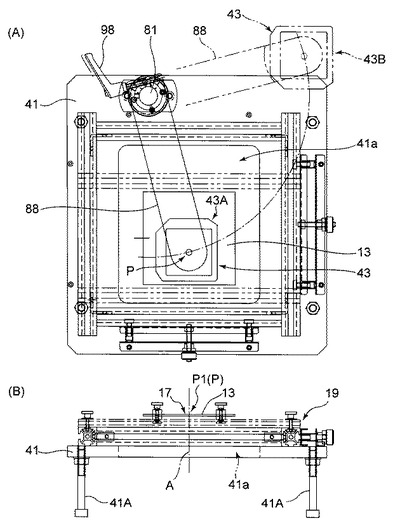
【図7】(A)は、前記リワーク装置における基板保持部と部品テーブルとを示す平面図であり、(B)は前記基板保持部と基板とを示す側面図である。
【発明を実施するための形態】
【0023】
以下、本発明の一実施形態に係るリワーク装置について図面を参照しながら詳細に説明する。
【0024】
<リワーク装置の全体構造>
図1及び図2に示すように、本実施形態に係るリワーク装置11を示す斜視図である。このリワーク装置11は、基板13(図7(B)参照)上における部品17の取り付け作業又は取り外し作業、並びに部品テーブル43上の部品17の取り出し作業(吸着作業)を作業軸A上において行う。作業軸Aは、リワーク装置11における作業の基準となる単一の基準線(仮想線)であり、本実施形態では鉛直方向に向いている。図1及び図2において、前方F、後方B、右方R、左方L、上方U及び下方Dは、図中にそれぞれ示す矢印で示す通りである。
【0025】
リワーク装置11は、ベース41と、このベース41から起立する支持部と、この支持部に平行な作業軸Aを中心に回動可能な観察部30と、前記支持部に平行な支軸26を中心に回動可能な作業ユニット20とを備えている。具体的には、前記支持部は、ベース41から起立する支柱81と、この支柱81から横方向に延びるアーム部とを含む。このアーム部は、後述する第1アーム部82と、第2アーム部84とを含む。リワーク装置11は、スライド機構92と、基板保持部19と、レーザーポインタ51と、部品テーブル43とをさらに備えている。
【0026】
ベース41は、平面視で矩形状の外形を有する板状の部材であり、中央部には上下方向に貫通する矩形状の貫通部41aが形成されている。ベース41は、各部材を安定して支持することができる大きさを有している。ベース41の下面には、複数の脚部41Aが取り付けられていてもよい(図5参照)。また、ベース41の貫通部41aの下方には、赤外線ヒータ、熱風ヒータなどの補助加熱機構53を配置して熱量を増加させてもよい(図5参照)。この補助加熱機構53は、基板保持部19に保持された基板13を補助的に加熱するためのものであり、省略することもできる。
【0027】
支柱81は、ベース41における後方Bの部位に配設されている。支柱81は、円柱形状を有し、ベース41の上面から上方に延びている。支柱81の下端は、ベース41の上面に固定されている。
【0028】
スライド機構92は、後述する作業ユニット20と観察部30とレーザーポインタ51とを一体的に上下方向に第1アーム部82に対してスライド移動させることができる。これにより、部品ピックアップ位置(上端位置)と、部品着脱位置(下端位置)とが切り換えられる。スライド機構92は、第1アーム部82と、ガイドレール87と、嵌合部86と、上下レバー91と、スライド軸93と、水平プレート94と、鉛直プレート83と、第2アーム部84とを含む。
【0029】
第1アーム部82は、支柱81の上端部に設けられており、支柱81から前方Fに延びる直方体形状を有している。この第1アーム部82は、作業ユニット20、観察部30、レーザーポインタ51などを支持する役割と、内部にスライド機構92の一部の部品を収容するケースとしての役割とを果たしている。
【0030】
ガイドレール87は、第1アーム部82の前面(前端)に固定されている。このガイドレール87は、上下方向に細長く延び、前後方向の厚みが左右方向の幅よりも小さい扁平な形状を有している。嵌合部86は、ガイドレール87に嵌合する凹部を有しており、ガイドレール87に沿って上下方向にスライド移動可能である。
【0031】
上下レバー91は、軸部91aと、この軸部91aの一端(外端)に取り付けられ、軸部91aに直交する方向に延びる把持部91bとを有している。軸部91aは、第1アーム部82の左側面に設けられた図略の貫通孔を通じて第1アーム部82内に挿入されている。軸部91aの他端(内端)は、第1アーム部82内に配置されている。
【0032】
スライド軸93は、軸部91aとガイドレール87との間に位置し、上下方向に延びる柱状の部材である。スライド軸93の一部は、第1アーム部82の上面に設けられた貫通孔を通じて第1アーム部82内に挿入されている。そして、スライド軸93の上下動作と軸部91aの回動動作とは、例えば第1アーム部82内に設けられた図略のギアなどによって連動するように構成されている。
【0033】
水平プレート94は、水平方向に延びる板状の部材であり、スライド軸93の上端と鉛直プレート83の上端との間に架け渡されており、これらを連結している。鉛直プレート83は、鉛直方向に延びる板状の部材である。鉛直プレート83の下部は、その内面(後方Bの表面)が嵌合部86の外面(前方Fの表面)に固定されている。
【0034】
第2アーム部84は、鉛直プレート83の上部に支持されている。具体的には、第2アーム部84の後方Bの端部は、鉛直プレート83の上部における前方Fの表面に固定されている。第2アーム部84は、鉛直プレート83から前方Fに延び、前端部から右方Rに屈曲しており、平面視でL字形状を有している。第2アーム部84の屈曲部84aには、後述する作業ユニット20が取り付けられている。第2アーム部84の屈曲部84aから右方Rに延びた先端部である右端部84bには、後述する観察部30とレーザーポインタ51とが取り付けられている。
【0035】
以上のような構成を有していることにより、作業者は、把持部91bを持って軸部91aを回動させることにより、スライド軸93を上下動させ、作業ユニット20と観察部30とレーザーポインタ51とを一体的に上下方向にスライド移動させることができる。これにより、作業者は、後述する部品ピックアップ位置(上端位置)と、部品着脱位置(下端位置)とを切り換えることができる。
【0036】
<基板保持部>
基板保持部19は、基板13と作業軸Aとが交わるように基板13を保持することができる。基板保持部19は、ベースレール部67と、第1調整機構69と、第2調整機構70と、一対の支持レール部68(68A,68B)とを備えている。
【0037】
ベースレール部67は、4つのレールがベース41の貫通部41aの4つの縁に沿って矩形状に配置され、隣り合う端部同士が互いに固定されることにより一体化されたものである。貫通部41aの右方Rに配置されたレールと左方Lに配置されたレールには、上面に長手方向に沿って延びる上溝部65が形成されている。
【0038】
第1調整機構69は、ベース41に対するベースレール部67の左右方向の位置を微調整するためのものであり、第2調整機構70は、ベース41に対するベースレール部67の前後方向の位置を微調整するためのものである。
【0039】
第1調整機構69は、ベース41の上面に固定された固定部材615と、ベースレール部67の外側面に固定された可動部材616と、固定部材615と可動部材616との間の間隔を調整する調整機構とを有している。固定部材615は、L字形状の断面を有する板状の部材である。調整機構は、固定部材615と可動部材616との間に設けられ、両サイドに配置された一対の付勢部材を含む。これらの付勢部材は、例えばばねなどによって構成されており、固定部材615に対して可動部材616が離れる方向に可動部材616を付勢している。前記調整機構は、固定部材615の起立部に設けられた貫通孔に挿通された軸部材619をさらに含む。この軸部材619の外面には雄ねじが形成されている。前記調整機構は、軸部材619に螺合されたナット部材617をさらに含む。
【0040】
軸部材619の内端部(可動部材616側の端部)は、可動部材616の平板部に固定されたナット618に螺合されている。軸部材619の外端部は、固定部材615の起立部よりも外側に突出しており、この突出部分にナット部材617が螺合されている。このナット部材617を右回転又は左回転させることにより、固定部材615と可動部材616との距離が調整され、それに伴ってベース41に対するベースレール部67の左右方向の位置が微調整される。
【0041】
なお、第2調整機構70は、ベース41に対するベースレール部67の前後方向の位置を微調整する点を除き、第1調整機構69と同様の構造を有しているので、詳細な説明は省略する。第2調整機構70のナット部材617を右回転又は左回転させることにより、固定部材615と可動部材616との距離が調整され、それに伴ってベース41に対するベースレール部67の前後方向の位置が微調整される。
【0042】
支持レール部68A,68Bは、ベースレール部67に対してスライド移動可能にベースレール部67に支持されている。各支持レール68は、上面に長手方向に沿って延びる溝部71を有している。
【0043】
各支持レール68の溝部71には、この溝部71に沿って長手方向にスライド移動可能な一対の載置部72,72が設けられている。各載置部72は、上部にねじを有しており、このねじの右回転又は左回転によって、支持レール68に対して固定された状態又はスライド移動可能な状態となる。各載置部72は、内側に棒状に突出する突出部63と、突出部63に隣接する上部に設けられた板ばね部64とをさらに有している。したがって、基板保持部19は、合計4つの突出部63と、合計4つの板ばね部64とを有している。
【0044】
基板13の大きさ及び基板13上の部品17の位置に応じて各支持レール68の位置が支持レール調節ノブ622により調節され、各載置部72の位置が調節される。そして、基板13は、その周縁部が4つの突出部63上に載置されるとともに、板ばね部64によって内側に付勢される。これにより、基板13は基板保持部19に安定した状態で保持される。
【0045】
<作業ユニット>
図3に示すように、作業ユニット20は、支軸26と、ユニット本体27と、4つのヘッド装着部29と、各ヘッド装着部29の位置を微調整するための微調整機構28(28A,28B,28C)と、複数の作業ヘッドとを有している。複数の作業ヘッドは、部品17を吸着する吸着作業部としての吸着ヘッド22と、はんだを加熱する加熱作業部としての加熱ヘッド21とを含む。
【0046】
支軸26は、上下方向に延びる柱状の部材である。その上端部が第2アーム部84の屈曲部84aに固定されており、屈曲部84aから下方に延びている。支軸26の延びる方向は、作業軸Aに平行である。
【0047】
ユニット本体27は、支軸26を中心に回動可能に支軸26に支持されている。ユニット本体27は、作業軸Aにほぼ平行な4つの側面を有する角柱形状を有している。これらの側面には、ヘッドスライド機構95を介してヘッド装着部29がそれぞれ支持されている。
【0048】
4つのヘッド装着部29には、図4(A)〜(E)に示すような作業ヘッドが装着される。これらのヘッド装着部29は、支軸26を中心とする周方向に沿って互いに間隔をあけた状態でユニット本体27に支持されている。隣り合うヘッド装着部29同士は、支軸26を中心とする角度が90°となる位置に配置されている。これらのヘッド装着部29は、ユニット本体27の回動に伴って支軸26を中心とする円軌道T1(図6参照)に沿って一体的に動作する。ヘッド装着部29は、上下方向に貫通する装着孔29aを有している。各作業ヘッドは、装着孔29aに挿入される。
【0049】
各ヘッドスライド機構95は、ユニット本体27の各側面に設けられたガイドレール951と、ガイドレール951に嵌合する凹部を有する嵌合部952と、ヘッド装着部29を退避位置(上位置)において係止するためのストッパ953と、このストッパ953の先端が入り込む係止穴954とを含む。各ガイドレール951は、上下方向に延びている。嵌合部952は、ガイドレール951に沿って上下方向にスライド移動可能である。図3は、各ヘッド装着部29が作業位置(下位置)に配置されている状態を示している。
【0050】
各微調整機構28は、第1板部材281、第2板部材282、第3板部材283、ねじ部材B1及びカムC1,C2を備えている。各微調整機構28は、ヘッド装着部29の上下方向の位置を微調整する第1機構28Aと、ヘッド装着部29の水平方向の位置を微調整する第2機構28Bと、この第2機構28Bに対して直交する方向においてヘッド装着部29の水平方向の位置を微調整する第3機構28Cとを含む。各微調整機構28は、作業ヘッドの先端部の位置を作業ポイントPに正確に調整可能である。
【0051】
第1板部材281は、ユニット本体27の下面から下方に延びている。第1板部材281は、ガイドレール951の内側に隣接して配置され、ユニット本体27の対応する側面に平行な姿勢で配置された板状の部材である。第1板部材281は、その下端部において屈曲し、外側に向かって突出する突出部281aを有している。
【0052】
第2板部材282は、嵌合部952の外面に平行な姿勢でこの外面に固定されている。第2板部材282は、その下端部において屈曲し、内側に向かって突出する突出部282aを有している。第2板部材282の突出部282aは、第1板部材281の突出部281aの上方に位置しており、第1板部材281の突出部281aと上下方向に対面するように配置されている。
【0053】
第3板部材283は、第2板部材282の外側に隣接して配置されている。この第3板部材283は、第2板部材282に平行であり第2板部材282に面接触している当接部283aと、この当接部283aの両サイドから外側に突出する一対の突出片283b,283cとを有している。
【0054】
第3板部材283は、当接部283a内に位置する回動中心R1において第2板部材282に対して回動可能に第2板部材282に支持されている。一対の突出片283b,283cは、互いに所定の間隔をあけて対向配置され、作業ヘッドが作業軸A上にあるときに左右方向に平行な板状の部位であり、これらの間にはヘッド装着部29が配置されている。ヘッド装着部29は、一方の突出片283b内に位置する回動中心R2と、他方の突出片283c内に位置する回動中心R3において、第3板部材283に対して回動可能に第3板部材283に支持されている。
【0055】
ねじ部材B1は、上下方向に延びる棒状の部材であり、外面に雄ねじが形成されている。このねじ部材B1は、第2板部材282の突出部282aに設けられた貫通孔に挿通されている。この貫通孔には雌ねじが形成されている。ねじ部材B1の下端部は、第1板部材281の突出部281aの上面に固定されている。
【0056】
したがって、作業者は、ねじ部材B1を回動させることにより、第1板部材281に対して第2板部材282を上下方向に移動させることができる。これにより、第1機構28Aでは、第3板部材283を介して第2板部材282に支持されたヘッド装着部29の上下方向(作業軸A方向)の位置を微調整することができる。
【0057】
カムC1は、中心軸が偏心した円形を有しており、回動中心R4が水平方向の一方に偏心した位置にある。カムC1は、第2板部材282に回動可能に支持されている。第3板部材283の当接部283aの一部(上部)は、突出片283bを超えた位置まで延びており、この部位には、カムC1の外周面の一部を包み込むようにカムC1に嵌り込む凹部(嵌合部)が形成されている。この凹部は、カムC1の円形状の外周面よりも若干大きな内周面を有している。第3板部材283は、前述した回動中心R1とカムC1とにおいて第2板部材282に支持されている。
【0058】
したがって、作業者は、上記のように偏心したカムC1を回動中心R4において回動させることにより、回動中心R4の反対側の部位が上方又は下方に変位して第3板部材283の凹部の内周面を押圧し、第3板部材283が回動中心R1を中心に上下方向に移動する。これにより、第2機構28Bでは、ヘッド装着部29の水平方向の位置を微調整することができる。
【0059】
カムC2は、カムC1と同様に、中心軸が偏心した円形を有しており、回動中心R5が水平方向の一方に偏心した位置にある。カムC2は、ヘッド装着部29に回動可能に支持されている。第3板部材283の突出片283bの先端部には、カムC2の外周面の一部を包み込むようにカムC2に嵌り込む凹部(嵌合部)が形成されている。この凹部は、カムC2の中心軸が偏心した円形の外周面よりも若干大きな内周面を有している。ヘッド装着部29は、前述した回動中心R2,R3とカムC2とにおいて第3板部材283に支持されている。
【0060】
したがって、作業者は、上記のように偏心したカムC2を回動中心R5において回動させることにより、回動中心R5の反対側の部位が上方又は下方に変位して第3板部材283の突出片283bにおける凹部の内周面を押圧し、ヘッド装着部29が回動中心R2,R3を中心に上下方向に移動する。これにより、第3機構28Bでは、第2機構28Bに対して直交する方向においてヘッド装着部29の水平方向の位置を微調整することができる。
【0061】
ストッパ953は、第2板部材282に対して直交する方向に延びる棒状の部材であり、その長手方向において第2板部材282に対して変位可能に第2板部材282に支持されている。具体的には、ストッパ953は、第2板部材282よりも外側に突出する部位、すなわち作業者が把持する把持部位と、第2板部材282よりも内側に突出する部位とを有している。ストッパ953は、図略のばねなどの付勢部材によって第2板部材282よりも内側に付勢されている。
【0062】
各ヘッドスライド機構95の係止穴954は、ユニット本体27の側面に形成されている。係止穴954は、ストッパ953の上方に位置している。ユニット本体27の側面には、ストッパ953と係止穴954の間に領域に下方に向かうほど内側に位置するように傾斜する傾斜面27aが形成されている。
【0063】
したがって、作業者は、ヘッドスライド機構95のガイドレール951に沿ってヘッド装着部29を上下方向にスライド移動させることができる。そして、作業者は、部品ピックアップ作業、部品取り付け作業又は取り外し作業に使用しない作業ヘッドを上方にスライド移動させ、ストッパ953を係止穴954に嵌合させることにより、このヘッド装着部29に装着された作業ヘッドを退避位置(上位置)に退避させることができる。作業ヘッドの上方への移動時には、ストッパ953の内端部が傾斜面27aに当接しながら傾斜面27aに押圧されて内側への突出量が減少しながら係止穴954に導かれる。
【0064】
また、作業者は、部品ピックアップ作業、部品着脱作業(部品取り付け作業又は取り外し作業)に使用する作業ヘッドについては、ストッパ953の前記把持部位を持って引き動作をすることにより、ストッパ953と係止穴954との係合を解除し、ヘッド装着部29を下方にスライド移動させることにより、このヘッド装着部29に装着された作業ヘッドを作業位置(下位置)に配置することができる。
【0065】
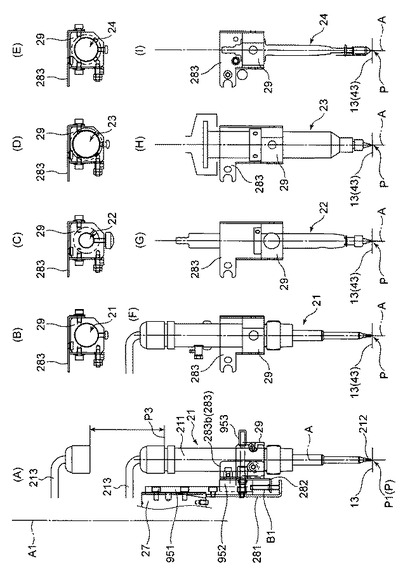
図4(A)は、加熱ヘッド21がヘッド装着部29に装着された状態を示す側面図である。図4(B)〜(E)は、ユニット本体27の4つのヘッド装着部29に装着された作業ヘッドの組合せ例を示す平面図であり、図4(F)〜(I)は、その正面図である。具体的には、図4(B),(F)は加熱ヘッド21を示し、図4(C),(G)は吸着ヘッド22を示し、図4(D),(H)ははんだ塗布ヘッド23を示し、図4(E),(I)ははんだ吸取ヘッド24を示している。各図において、作業軸Aと基板13又は部品テーブル43とが交わる部位は、各作業が行われる作業ポイントPである。
【0066】
図4(A)に示すように、加熱ヘッド21は、ヘッド装着部29の装着孔29aに挿入されて支持される柱状のヘッド本体211と、このヘッド本体211から下方に延びる加熱部212と、ヘッド本体211から上方に延びる熱源供給部213とを有している。図4(A),(B),(F)に示す加熱ヘッド21としては、例えばホットエアヘッド21、はんだこてヘッド21などを用いることができる。
【0067】
この加熱ヘッド21は、基板13に部品17を接合するはんだを溶融させるための熱源である。ホットエアヘッド21の場合、はんだ、部品17及び基板13に対して非接触の状態ではんだに熱を供給することができる。具体的には、ホットエアヘッド21の加熱部212の先端(下端)をはんだに近接する位置に配置し、この状態で熱源供給部213を通じて供給されるホットエアを加熱部212からはんだに向けて供給すればよい。はんだこてヘッド21を用いる場合には、はんだこてヘッド21の加熱部212の先端(下端)をはんだに当接する位置に配置し、この状態で熱源供給部213を通じて供給される電力により昇温された加熱部212の先端からはんだに熱を供給すればよい。なお、ホットエアヘッド21とはんだこてヘッド21とは、ヘッド本体211を共用し、先端の加熱部212のみを交換する構造を採用することもできる。
【0068】
図4(C),(G)に示す吸着ヘッド22は、先端(下端)又はその近傍に空気を吸い込む図略の吸着部を有している。吸着ヘッド22の上端部は、図略のチューブによって図5に示す吸引手段(バキューム)97に接続されている。吸引手段97を作動させることにより、吸着ヘッド22の吸着部から空気が吸い込まれるので、部品17を吸着部に吸着することができる。
【0069】
図4(D),(H)に示す塗布ヘッド23は、クリームはんだ(フラックス)を基板13や部品17に塗布するためのものである。この塗布ヘッド23の上端部は、図略のチューブによって図略のクリームはんだ供給手段に接続されている。この供給手段から塗布ヘッド23にクリームはんだを送り込むことにより、塗布ヘッド23の先端(下端)からクリームはんだが吐出される。これにより、基板13や部品17にクリームはんだを塗布することができる。
【0070】
図4(E),(I)に示すはんだ吸取ヘッド24は、基板13又は部品17に付着したはんだを吸い取るためのものである。吸取ヘッド24は、前述の吸着ヘッド22と同様に、吸引手段に接続されており、先端(下端)からはんだを吸い込むことができる。
【0071】
作業ユニット20では、これらの4つの作業ヘッド21〜24が支軸26を中心とする円軌道T1に沿って一体的に動作して各作業ヘッド部の位置が変更される。これにより作業軸A上に配置される作業ヘッドが複数の作業ヘッド21〜24から選択される。
【0072】
<観察部>
図1及び図2に示すように、観察部30は、回動機構31と、観察部本体としてのカメラ(映像撮影装置)32とを備えている。カメラ32は、回動機構31に支持されている。カメラ32は、作業ポイントPを斜め上方から観察可能な姿勢で回動機構31に支持されている。カメラ32としては、例えばマイクロスコープなどを用いることができる。カメラ32によって撮影された画像は、作業者がリアルタイムで確認できるように、例えば図略のモニターに映し出される。また、観察部30は、カメラ32が作業ポイントPを斜め上方から観察するときの水平方向に対する傾斜角度を変更可能な傾斜角度調節機構をさらに備えている。
【0073】
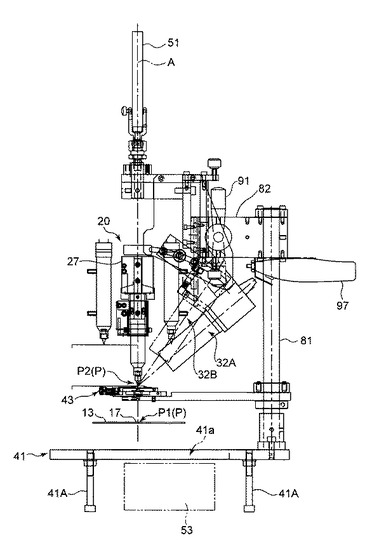
図5に示すように、観察部30は、作業軸Aと基板13又は部品テーブル43とが交わる作業ポイントPを拡大観察する。作業ポイントPは、作業軸Aと基板13とが交わる作業ポイントP1と、作業軸Aと部品テーブル43とが交わる作業ポイントP2とを含む。
【0074】
図4(A)に示すように、作業ユニット20、観察部30及びレーザーポインタ51が部品着脱位置(下位置)にあるときには、基板13に部品17が取り付け又は取り外しされるので、作業ポイントP1においてこれらの作業が行われる。一方、図5に示すように、作業ユニット20、観察部30及びレーザーポインタ51が部品ピックアップ位置(上位置)にあるときには、部品テーブル43から部品17がピックアップされるので、作業ポイントP2においてこの作業が行われる。
【0075】
回動機構31は、第2アーム部84に対して上下方向の中心軸を中心として回動可能であり、かつカメラ32を支持可能な部材である。具体的には、回動機構31は、第2アーム部84の上面に載置された水平板31aと、この水平板31aの側縁に固定され、下方に延びる鉛直板31bとを含む。水平板31aは、作業軸Aに一致する回動中心において図略のシャフトなどの支持部材を介して第2アーム部84の右端部84bに回動可能に支持されている。鉛直板31bの下端部には、作業ポイントPを中心とする円弧に沿った円弧状のスリット31cが形成されている。
【0076】
カメラ32は、鉛直板31bに固定される基端部32aと、この基端部32aから斜め下方に延びる円柱形状のカメラレンズ組品32bと、一対のガイドピン32c,32dと、止めねじ32eとを含む。このカメラレンズ組品32bは、作業ポイントPに向かって延びている。一対のガイドピン32c,32d及び止めねじ32eは、基端部32aの側部に取り付けられている。
【0077】
一対のガイドピン32c,32dは、鉛直板31bのスリット31cに挿通され、互いに間隔をあけて配置されており、スリット31cの範囲内においてスライド移動可能である。ガイドピン32c,32dは、基端部32a及びカメラレンズ組品32bを回動機構31に連結している。スリット31cは、作業ポイントPを中心とする円弧形状であるので、例えば図5に示すようにガイドピン32c,32dのスライド移動前の位置32A、スライド移動後の位置32B、及びこれらの間の位置において、カメラ32は、作業ポイントPを観察可能である。
【0078】
前記傾斜角度調節機構は、スリット31c、ガイドピン32c,32d、止めねじ32eを含む。この傾斜角度調節機構を備えていることにより、カメラ32のカメラレンズ組品32bの傾斜角度を、作業ポイントPを中心とするスリット31cの円弧軌道に沿って変更することができる。カメラ32のカメラレンズ組品32bの傾斜角度及びその変更範囲については特に限定されるものではない。具体例を挙げると、水平方向に対するカメラレンズ組品32bの傾斜角度は、10°〜80°の範囲で調整できるのが好ましく、20°〜70°の範囲で調整できるのがより好ましい。図5に示す実施形態では、前記傾斜角度が40°〜65°の範囲で調整できる場合を例示している。
【0079】
止めねじ32eは、一対のガイドピン32c,32dの間に配置されている。止めねじ32eは、スリット31cに挿通され、外面に雄ねじが形成された軸部と、この軸部の端部に螺合された雌ねじが内面に形成されたと把持部とを有している。この把持部を右回転又は左回転させることにより、一対のガイドピン32c,32dのスライド移動が規制又は規制解除され、カメラ32が回動機構31に対して固定又は固定解除される。
【0080】
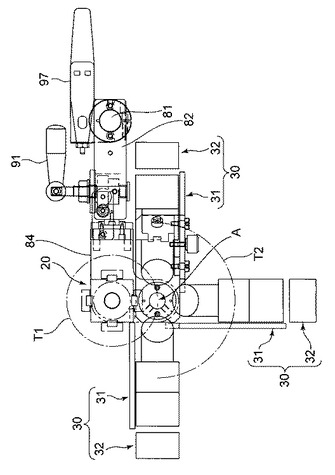
図6に示すように、回動機構31は作業軸Aを中心に回動する。カメラ32は、回動機構31の回動に伴って作業軸Aを中心とする円弧軌道T2に沿って移動して作業ポイントPを観察する方向が変更される。カメラ32は、回動機構31の回動中において斜め上方からの観察姿勢を維持する。本実施形態の回動機構31では、図6に示すように作業軸Aを中心に回動可能な角度が180°である。これにより、例えば正面、背面、側面などの広範囲から作業ポイントPを観察できる。
【0081】
レーザーポインタ51は、第2アーム部84及び回動機構31の水平板31aの上方に配置されている。レーザーポインタ51の下方に位置する第2アーム部84、水平板31aなどの部材は、レーザー光が作業ポイントPに届くように、作業軸Aに沿った貫通孔を有している。レーザーポインタ51の下端部からは作業軸Aに一致し作業ポイントPを通るレーザー光が下方に向かって出される。したがって、作業者は、このレーザー光によって作業ポイントPのおおまかな位置を目視で確認できる。
【0082】
<部品テーブル>
図1及び図2に示すように、部品テーブル43は、第3アーム部88を介して支柱81に支持されている。第3アーム部88の基端部は、支柱81を中心に回動可能に支柱81に支持されている。部品テーブル43は、作業軸Aを中心に回動可能に第3アーム部88の先端部に支持されている。第3アーム部88の基端部には、この第3アーム部88の回動の規制及び規制解除をするレバー98が設けられている。
【0083】
図7(A)に示すように、部品テーブル43は、作業軸Aと交わる作業位置43Aと、作業軸Aとは交わらない退避位置43Bとの間を移動可能である。本実施形態では、支柱81を中心とする第3アーム部88の回動範囲は約90°である。部品テーブル43の上面には、複数の新しい部品17が配列されたテープ18を載置する載置凹部が形成されている。載置凹部に載置されたテープ18は、載置凹部にまたがるように配設された一対の留め具によって位置決めされている。部品テーブル43は、作業軸Aを中心に少なくとも90°回動可能である。これにより、作業位置43Aにおいて新しい部品17を所望の向きに調節できる。
【0084】
部品テーブル43は、左右方向の位置を微調整するための微調整機構44と、前後方向の位置を微調整するための微調整機構45とを備えている。これにより、作業位置43Aにおいて、載置凹部に載置されたテープ18上の部品17を作業軸Aに正確に一致させることができる。
【0085】
<リワーク作業の流れ>
次に、上記したリワーク装置11を用いたリワーク作業の一例について説明する。
【0086】
(1)作業者は、基板保持部19に基板13をセットする。
ついで、作業者は、レーザーポインタ51によってレーザー光を照射し、作業ポイントPに対する基板13のおおまかな位置を合わせる。
【0087】
(2)作業者は、上下レバー91を操作し、第2アーム部84を部品着脱位置(下端位置)へ移動させる。
ついで、作業者は、観察部30を用いて、作業軸A上の作業ポイントPに基板13の作業対象部位(リワークポイント)があるか否か確認する。このとき、回動機構31を0°〜180°の範囲において回動させ、例えば正面、背面、側面などの3方向から観察し、ずれがある場合には、第1調整機構69及び第2調整機構70を用いて前後方向、左右方向の基板13の位置調整を行う。
次に、基板13上の部品17を取り外す作業が必要な場合には、作業者は、下記作業(3),(4)を行い、基板13上の部品17を取り外す作業が不要である場合には、作業者は、作業(3),(4)を省略し、下記作業(5)を行う。
なお、以下の作業において、微小な位置ずれを調整するとき、基板13上のランドを選択するとき等には、基板保持部19、部品テーブル43の微調整機構44,45を用いて位置を微調整する。
【0088】
(3)作業者は、作業ユニット20を回動させ、はんだこてヘッド21、ホットエアヘッド21などの加熱ヘッド21を作業軸A上に配置する。この状態では、ユニット本体27に装着された4つの作業ヘッドは、すべて退避位置(上位置)に配置されている。ついで、作業者は、加熱ヘッド21に対応するストッパ953を引いてストッパ953と係止穴954との係合を解除して加熱ヘッド21を作業位置(下位置)にスライド移動させる。
ついで、作業者は、観察部30を用いて、加熱ヘッド21の先端の位置と、作業対象の部品17の位置とを確認しながら、各微調整機構28を用いて加熱ヘッド21の位置を微調整する。はんだこてヘッド21を用いる場合には、その先端を作業対象の部品17に当接させる。ホットエアヘッド21を用いる場合には、その先端を作業対象の部品17に近接させる。これにより、加熱ヘッド21の熱により部品17と基板13とを接合するはんだが溶融する。はんだが溶融すると、そのはんだの表面張力により部品17が加熱ヘッド21の先端に付着するので、この状態で加熱ヘッド21を上昇させることにより部品17を基板13から取り外すことができる。
【0089】
(4)作業者は、作業ユニット20を回動させ、吸取ヘッド24を作業軸A上に配置する。ついで、作業者は、吸取ヘッド24に対応するストッパ953を引いてストッパ953と係止穴954との係合を解除して吸取ヘッド24を作業位置(下位置)にスライド移動させる。
ついで、作業者は、観察部30を用いて、吸取ヘッド24の先端の位置と、部品17が取り外された領域のランドの位置とを確認しながら、各微調整機構28を用いて吸取ヘッド24の先端をランドに当接させる。そして、ランドに残存しているはんだを吸取ヘッド24によって吸い取って基板13上から除去する。
【0090】
(5)作業者は、作業ユニット20を回動させ、塗布ヘッド23を作業軸A上に配置する。ついで、作業者は、観察部30を用いて、塗布ヘッド23の先端の位置と、ランドの位置とを確認しながら、各微調整機構28を用いて塗布ヘッド23の位置を調整した後、ランドにクリームはんだを塗布する。
【0091】
(6)作業者は、上下レバー91を操作し、第2アーム部84を部品ピックアップ位置(上端位置)へ移動させる。ついで、作業者は、第3アーム部88を回動させ、部品テーブル43を作業位置43Aに配置する。
ついで、作業者は、観察部30を用いて、作業軸A上に対象の部品17(ピックアップポイント)があるか否かを確認する。このとき、回動機構31を0°〜180°の範囲において回動させ、例えば正面、背面、側面などの3方向から観察し、これらの位置関係にずれがある場合には、微調整機構44,45を用いて、部品テーブル43の前後方向及び左右方向の位置調整を行う。
【0092】
(7)作業者は、作業ユニット20を回動させ、吸着ヘッド22を作業軸A上に配置する。ついで、作業者は、観察部30を用いて、吸着ヘッド22の先端(吸着部)の位置と、テープ18上の新しい部品17の位置とを確認しながら、各微調整機構28を用いて吸着ヘッド22の位置を調整した後、吸着ヘッド22により部品17を吸着する。このように部品17を吸着した状態で、各微調整機構28を用いて吸着ヘッド22を上方に少し上昇させる。
【0093】
(8)作業者は、第3アーム部88を回動させ、部品テーブル43を退避位置43Bに配置する。ついで、作業者は、上下レバー91を操作し、第2アーム部84を部品着脱位置(下端位置)へ移動させる。
ついで、作業者は、観察部30を用いて、吸着ヘッド22に吸着された部品17の位置と、ランドの位置とを確認しながら、各微調整機構28を用いてこれらの位置を合わせ、各微調整機構28を用いて吸着ヘッド22を下方に少し下降させることによりランドに部品17を配置する。
【0094】
(9)作業者は、作業ユニット20を回動させ、加熱ヘッド21を作業軸A上に配置する。前述と同様にして加熱ヘッド21と部品17との位置を調整した後、加熱ヘッド21の熱によりはんだを溶融させ、部品17を基板13にはんだ付けする。なお、加熱ヘッド21による加熱工程では、前述した補助加熱機構53を併用してもよい。
【0095】
<実施形態の概要>
以上の実施形態をまとめると次のようになる。
【0096】
本実施形態では、部品の取り外し作業及び取り付け作業において、吸着ヘッド22により部品17を吸着して部品17の配置及び移動を行うことができ、また、加熱ヘッド21によりはんだなどの接合材を加熱溶融させて部品17を基板13上に接合し、又は部品17を基板13から取り外すことができる。また、作業ユニット20では、前記複数の作業ヘッドが予め定められた軌道に沿って一体的に動作して各作業ヘッドの位置が変更されることにより前記作業軸A上に配置される作業ヘッドを前記複数の作業ヘッドから選択可能であるので、各作業の作業性に優れ、しかも複数の異なる作業工程(吸着工程、加熱工程など)を単一の装置により実現できる。
【0097】
また、本実施形態では、観察部30によって作業ポイントPを拡大観察しながら微小部品17のリワーク作業を行うことができる。しかも、この観察部30の観察部本体32は、回動機構31の回動に伴って前記円弧軌道T2に沿って移動して作業ポイントPを観察する方向が変更される。すなわち、観察部本体32を前記円弧軌道T2上の異なる位置に配置することができ、これらの位置において作業ポイントPをそれぞれ観察することによって作業ポイントPを異なった方向から観察できる。したがって、この構成では、部品17、基板13及び作業ヘッドの位置を精度よく合わせることができる。
【0098】
また、本実施形態では、観察部本体32は、回動機構31の回動に伴って斜め上方からの観察を維持しつつ前記円弧軌道T2に沿って移動するので、例えば水平方向に作業ポイントPを観察する場合に比べて作業ポイントPに位置する部品17、基板13、作業ヘッド及び接合材をより立体的に観察することができる。これにより、位置合わせの精度をより高めることができる。また、斜め上方からの観察であるので、基板13上に供給される接合材の量や形状、部品17が基板13上に接合された後の接合材の形状(フィレット)などの接合材の状態を立体的に正確に判別することができる。
【0099】
また、本実施形態では、リワーク装置11において、観察部30は、観察部本体32が作業ポイントPを観察するときの水平方向に対する傾斜角度を変更可能な傾斜角度調節機構をさらに備えているので、傾斜角度の変更に伴って作業ポイントを観察する角度を変更することができる。
【0100】
また、本実施形態では、ユニット本体27を回動させることにより作業軸A上に配置する作業ヘッドを選択できるので、例えば複数の作業ヘッドが一方向に直線状に配列され、この一方向の直線軌道に沿って複数の作業ヘッドを一体的に動作させる場合に比べて、複数の作業ヘッドを配置するのに必要なスペースが前記一方向に大きくなるのを抑制でき、コンパクト化を図ることができる。また、作業ユニット20が作業軸Aと平行な支軸を中心に回動する構造であるので、この作業ユニット20にその周方向に沿って複数の作業ヘッドを支持させれば、円軌道T1上を移動する各作業ヘッドは、作業ユニット20の回動時に必ず作業軸Aを通過する。
【0101】
また、本実施形態では、回動機構31の回動可能な角度が180°であることにより、例えば正面、背面、側面などの広範囲から作業ポイントPを観察できるので、死角となる領域が少なくなり、基板13上に部品17を接合する接合材の状態をさらに正確に判別することができる。
【0102】
また、本実施形態では、作業ユニット20は、前記作業軸A上に配置される作業ヘッドの位置を前記作業軸A方向に微調整する微調整機構を有しているので、各作業ヘッドの位置をより精度よく調整できる。
【0103】
また、本実施形態では、退避位置において部品テーブル上に部品が載置され、この部品17が作業位置において吸着ヘッド22によって吸着される。この作業位置では、部品17が吸着される前に、作業軸Aを中心に部品テーブル43を少なくとも90°の範囲で回動させることができるので、吸着時の部品17の向きを所望の向きに予め調節できる。
【0104】
また、本実施形態では、レーザーポインタ51によっておおまかな作業軸Aの位置を目視できるので、予め手作業によっておおまかな位置調整が可能となり、作業性がさらに向上する。
【0105】
また、本実施形態では、補助加熱機構53をさらに備えているので、加熱に要する時間を短縮できるので作業のスピードアップが図れ、また、リワーク範囲を広げることができる。
【0106】
本実施形態の他の利点としては、次の項目が挙げられる。
【0107】
前記作業ユニット20が円軌道T1に沿って一体的に動作する構成の場合、前記回動機構31における前記作業軸Aを中心に回動可能な最大角度を180°又はこれより大きくすることが可能になる。例えば、複数の作業ヘッドが前記一方向に直線状に配列されている構成の場合には、この直線軌道が邪魔になるので回動機構の回動可能な最大角度を180°未満にせざるを得ない。
【0108】
回動機構31の回動可能な最大角度が180°又はこれより大きいことにより、例えば正面、背面、側面などの広範囲から作業ポイントPを観察できるので、死角となる領域が少なくなり、基板13上に部品17を接合する接合材の状態をさらに正確に判別することができる。
【0109】
また、本実施形態では、一連の作業を行う各作業ヘッドが支軸を中心にユニット本体27に取り付けられており、作業軸Aの位置に移動させることができるコンパクトな構造を有しており、また、本実施形態では、各作業ヘッドはヘッド装着部29に固定されているわけではなく、適宜組み合わせを変えることができる。また、市販の工具をヘッド装着部29に取り付けることもできる。
【0110】
本実施形態では、カメラは1台であるが、作業軸Aを中心に0°〜180°の範囲において回転観察可能であり、部品ピックアップポイント、作業ポイントでの前後方向及び左右方向の位置確認が容易である。これにより、各作業のスピードアップが可能になる。
【0111】
以上、本発明の実施形態に係る表面処理装置について説明したが、本発明は、前記実施形態に限定されるものではなく、その趣旨を逸脱しない範囲で種々変更、改良等が可能である。
【0112】
前記実施形態では、作業ユニットが支軸を中心に回動する構成を例示したが、これに限定されない。作業ユニットは、例えば複数の作業ヘッドが一方向に直線状に配列され、この一方向の直線軌道に沿って複数の作業ヘッドを一体的に動作させるような構成であってもよい。
【0113】
前記実施形態では、観察部本体が作業ポイントを斜め上方から観察する場合を例示したが、これに限定されない。例えば、観察部本体が作業ポイントを水平方向に観察するような形態であってもよい。
【0114】
前記実施形態では、単一のスライド機構92によって作業ユニット20と観察部30とレーザーポインタ51とが一体的に上下方向にスライド移動する場合を例示したが、これに限定されない。作業ユニット20、観察部30及びレーザーポインタ51は、別々のスライド機構によって上下方向に移動する形態であってもよい。また、作業軸Aと基板13とが交わる作業ポイントP1と、作業軸Aと部品テーブル43とが交わる作業ポイントP2とが同じ位置にある場合には、スライド機構92を省略して作業ユニット20、観察部30及びレーザーポインタ51が上下方向に移動しない形態であってもよい。
【0115】
前記実施形態では、部品テーブル43を備えている場合を例示したが、この部品テーブル43は、必ずしもリワーク装置11に含まれていなくてもよい。
【0116】
前記実施形態では、観察部30の回動機構31が0〜180°の範囲で回動する場合を例示したが、円弧軌道上の複数箇所において観察できればよいので、回動機構31の回動範囲は、180°未満(例えば0〜90°の範囲など)であってもよい。
【符号の説明】
【0117】
11 リワーク装置
13 基板
17 部品
19 基板保持部
20 作業ユニット
26 支軸
27 ユニット本体
28 微調整機構
30 観察部
31 回動機構
32 観察部本体
41 ベース
43 部品テーブル
51 レーザーポインタ
53 補助加熱機構
A 作業軸
P 作業ポイント
【技術分野】
【0001】
本発明は、基板上に接合された電子部品を取り外す作業及び基板上に電子部品を取り付ける作業を行うためのリワーク装置に関するものである。
【背景技術】
【0002】
従来、基板に電子部品がはんだ付けされた電子回路基板において基板から不良部品を取り外し、その部位に新しい部品を取り付けるためのリワーク装置が知られている。近年の部品は、例えば0.6mm×0.3mmのサイズや0.4mm×0.2mmのサイズなどのように非常に微小なサイズを有している。したがって、部品の取り外し作業及び取り付け作業において、部品の位置などを肉眼により正確に判別するのは困難である。
【0003】
そこで、特許文献1には、肉眼では判別できない程の小さな部品を正確に保持し、基板上における実装部品の交換作業が容易に行えることを目的としたリワーク装置が開示されている。このリワーク装置は、撮影装置を備えている。この撮影装置では、基板取付台上の基板表面の画像と、保持具先端に保持された部品の画像とをともに撮影し、これらの画像を合成する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−228131号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のリワーク装置では、保持具先端に保持される部品と基板表面との位置合わせの精度が必ずしも高くない。
【0006】
そこで、本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、加熱や吸着するための作業部と部品との位置合わせ、作業部と基板との位置合わせなどを精度よく行うことができるリワーク装置を提供することにある。
【課題を解決するための手段】
【0007】
(1)本発明は、基板上に接合材によって接合された部品を取り外す作業及び前記基板上に部品を取り付ける作業を行うリワーク装置に関するものである。前記リワーク装置は、前記基板が作業軸と交わるように前記基板を保持する基板保持部と、前記部品を吸着する吸着作業部及び前記接合材を加熱する加熱作業部を含む複数の作業部を有する作業ユニットと、前記作業軸と前記基板とが交わる作業ポイントを拡大観察する観察部と、を備えている。前記作業ユニットでは、前記複数の作業部が予め定められた軌道に沿って一体的に動作して各作業部の位置が変更されることにより前記作業軸上に配置される作業部が前記複数の作業部から選択される。前記観察部は、前記作業軸を中心に回動可能な回動機構と、前記回動機構に支持され、前記回動機構の回動に伴って前記作業軸を中心とする円弧軌道に沿って移動して前記作業ポイントを観察する方向が変更される観察部本体と、を備えている。前記作業は単一の前記作業軸上において行われる。
【0008】
この構成では、部品の取り外し作業及び取り付け作業において、吸着作業部により部品を吸着して部品の配置及び移動を行うことができ、また、加熱作業部によりはんだなどの接合材を加熱溶融させて部品を基板上に接合し、又は部品を基板から取り外すことができる。また、作業ユニットでは、前記複数の作業部が予め定められた軌道に沿って一体的に動作して各作業部の位置が変更されることにより前記作業軸上に配置される作業部を前記複数の作業部から選択可能であるので、各作業の作業性に優れ、しかも複数の異なる作業工程(吸着工程、加熱工程など)を単一の装置により実現できる。
【0009】
また、この構成では、観察部によって作業ポイントを拡大観察しながら微小部品のリワーク作業を行うことができる。しかも、この観察部の観察部本体は、回動機構の回動に伴って前記円弧軌道に沿って移動して作業ポイントを観察する方向が変更される。すなわち、観察部本体を前記円弧軌道上の異なる位置に配置することができ、これらの位置において作業ポイントをそれぞれ観察することによって作業ポイントを異なった方向から観察できる。したがって、この構成では、加熱や吸着するための作業部と部品との位置合わせ、作業部と基板との位置合わせなどを精度よく行うことができる。
【0010】
(2)前記リワーク装置において、前記観察部本体は、前記作業ポイントを斜め上方から観察可能な姿勢で前記回動機構に支持されており、前記回動機構の回動に伴って斜め上方からの観察姿勢を維持しつつ前記円弧軌道に沿って移動して前記作業ポイントを観察する方向が変更されるのが好ましい。
【0011】
この構成では、観察部本体は、回動機構の回動に伴って斜め上方からの観察を維持しつつ前記円弧軌道に沿って移動するので、例えば水平方向に作業ポイントを観察する場合に比べて作業ポイントに位置する部品、基板、作業部及び接合材をより立体的に観察することができる。これにより、位置合わせの精度をより高めることができる。また、斜め上方からの観察であるので、基板上に供給される接合材の量や形状、部品が基板上に接合された後の接合材の形状(フィレット)などの接合材の状態を立体的に正確に判別することができる。
【0012】
(3)前記リワーク装置において、前記観察部は、前記観察部本体が前記作業ポイントを観察するときの水平方向に対する傾斜角度を変更可能な傾斜角度調節機構をさらに備えているのが好ましい。
【0013】
この構成では、傾斜角度の変更に伴って作業ポイントを観察する角度を変更することができる。
【0014】
(4)前記リワーク装置において、前記作業ユニットは、前記作業軸に平行な支軸と、前記支軸を中心に回動可能に前記支軸に支持されたユニット本体とをさらに有し、前記複数の作業部は、前記支軸を中心とする周方向に沿って互いに間隔をあけて配置された状態で前記ユニット本体に支持されており、前記ユニット本体の回動に伴って前記支軸を中心とする円軌道に沿って一体的に動作するのが好ましい。
【0015】
この構成では、ユニット本体を回動させることにより作業軸上に配置する作業部を選択できるので、例えば複数の作業部が一方向に直線状に配列され、この一方向の直線軌道に沿って複数の作業部を一体的に動作させる場合に比べて、複数の作業部を配置するのに必要なスペースが前記一方向に大きくなるのを抑制でき、コンパクト化を図ることができる。また、作業ユニットが作業軸と平行な支軸を中心に回動する構造であるので、この作業ユニットにその周方向に沿って複数の作業部を支持させれば、各作業部は、作業ユニットの回動時に必ず作業軸を通過する構成にすることができる。
【0016】
(5)前記リワーク装置において、前記作業ユニットは、前記作業軸上に配置される作業部の位置を前記作業軸方向に微調整する微調整機構をさらに有しているのが好ましい。この構成では、各作業部の位置をより精度よく調整できる。
【0017】
(6)前記リワーク装置において、前記基板上に取り付けるための部品が載置される部品テーブルをさらに備え、前記部品テーブルは、前記作業軸と交わる作業位置と、前記作業軸とは交わらない退避位置との間を移動可能であり、かつ前記作業位置において前記作業軸を中心に少なくとも90°回動可能であるのが好ましい。
【0018】
この構成では、退避位置において部品テーブル上に部品が載置され、この部品が作業位置において吸着作業部によって吸着される。この作業位置では、部品が吸着される前に、作業軸を中心に部品テーブルを少なくとも90°の範囲で回動させることができるので、吸着時の部品の向きを所望の向きに予め調節できる。
【0019】
(7)前記リワーク装置において、前記作業軸を通る光軸を有するレーザーポインタをさらに備えているのが好ましい。この構成では、レーザーポインタによっておおまかな作業軸を目視できるので、予め手作業によっておおまかな位置調整が可能となり、作業性がさらに向上する。
【0020】
(8)前記リワーク装置において、前記基板保持部に保持された前記基板を補助的に加熱するための補助加熱機構をさらに備えているのが好ましい。この構成では、補助加熱機構をさらに備えているので、加熱に要する時間を短縮できる。
【発明の効果】
【0021】
以上説明したように、本発明によれば、部品と基板と部品の吸着や接合材の加熱を行うための作業部とを精度よく位置合わせすることができ、しかも接合材の状態を正確に判別することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態に係るリワーク装置を斜め上方から見た状態を示す斜視図である。
【図2】前記リワーク装置を背面側の斜め上方から見た状態を示す斜視図である。
【図3】前記リワーク装置の作業ユニットを示す斜視図である。
【図4】(A)〜(E)は、前記作業ユニットの各作業部を示す図である。
【図5】前記リワーク装置の観察部の傾斜角度が調節される状態を示す側面図である。
【図6】前記リワーク装置の観察部が回動される状態を示す平面図である。
【図7】(A)は、前記リワーク装置における基板保持部と部品テーブルとを示す平面図であり、(B)は前記基板保持部と基板とを示す側面図である。
【発明を実施するための形態】
【0023】
以下、本発明の一実施形態に係るリワーク装置について図面を参照しながら詳細に説明する。
【0024】
<リワーク装置の全体構造>
図1及び図2に示すように、本実施形態に係るリワーク装置11を示す斜視図である。このリワーク装置11は、基板13(図7(B)参照)上における部品17の取り付け作業又は取り外し作業、並びに部品テーブル43上の部品17の取り出し作業(吸着作業)を作業軸A上において行う。作業軸Aは、リワーク装置11における作業の基準となる単一の基準線(仮想線)であり、本実施形態では鉛直方向に向いている。図1及び図2において、前方F、後方B、右方R、左方L、上方U及び下方Dは、図中にそれぞれ示す矢印で示す通りである。
【0025】
リワーク装置11は、ベース41と、このベース41から起立する支持部と、この支持部に平行な作業軸Aを中心に回動可能な観察部30と、前記支持部に平行な支軸26を中心に回動可能な作業ユニット20とを備えている。具体的には、前記支持部は、ベース41から起立する支柱81と、この支柱81から横方向に延びるアーム部とを含む。このアーム部は、後述する第1アーム部82と、第2アーム部84とを含む。リワーク装置11は、スライド機構92と、基板保持部19と、レーザーポインタ51と、部品テーブル43とをさらに備えている。
【0026】
ベース41は、平面視で矩形状の外形を有する板状の部材であり、中央部には上下方向に貫通する矩形状の貫通部41aが形成されている。ベース41は、各部材を安定して支持することができる大きさを有している。ベース41の下面には、複数の脚部41Aが取り付けられていてもよい(図5参照)。また、ベース41の貫通部41aの下方には、赤外線ヒータ、熱風ヒータなどの補助加熱機構53を配置して熱量を増加させてもよい(図5参照)。この補助加熱機構53は、基板保持部19に保持された基板13を補助的に加熱するためのものであり、省略することもできる。
【0027】
支柱81は、ベース41における後方Bの部位に配設されている。支柱81は、円柱形状を有し、ベース41の上面から上方に延びている。支柱81の下端は、ベース41の上面に固定されている。
【0028】
スライド機構92は、後述する作業ユニット20と観察部30とレーザーポインタ51とを一体的に上下方向に第1アーム部82に対してスライド移動させることができる。これにより、部品ピックアップ位置(上端位置)と、部品着脱位置(下端位置)とが切り換えられる。スライド機構92は、第1アーム部82と、ガイドレール87と、嵌合部86と、上下レバー91と、スライド軸93と、水平プレート94と、鉛直プレート83と、第2アーム部84とを含む。
【0029】
第1アーム部82は、支柱81の上端部に設けられており、支柱81から前方Fに延びる直方体形状を有している。この第1アーム部82は、作業ユニット20、観察部30、レーザーポインタ51などを支持する役割と、内部にスライド機構92の一部の部品を収容するケースとしての役割とを果たしている。
【0030】
ガイドレール87は、第1アーム部82の前面(前端)に固定されている。このガイドレール87は、上下方向に細長く延び、前後方向の厚みが左右方向の幅よりも小さい扁平な形状を有している。嵌合部86は、ガイドレール87に嵌合する凹部を有しており、ガイドレール87に沿って上下方向にスライド移動可能である。
【0031】
上下レバー91は、軸部91aと、この軸部91aの一端(外端)に取り付けられ、軸部91aに直交する方向に延びる把持部91bとを有している。軸部91aは、第1アーム部82の左側面に設けられた図略の貫通孔を通じて第1アーム部82内に挿入されている。軸部91aの他端(内端)は、第1アーム部82内に配置されている。
【0032】
スライド軸93は、軸部91aとガイドレール87との間に位置し、上下方向に延びる柱状の部材である。スライド軸93の一部は、第1アーム部82の上面に設けられた貫通孔を通じて第1アーム部82内に挿入されている。そして、スライド軸93の上下動作と軸部91aの回動動作とは、例えば第1アーム部82内に設けられた図略のギアなどによって連動するように構成されている。
【0033】
水平プレート94は、水平方向に延びる板状の部材であり、スライド軸93の上端と鉛直プレート83の上端との間に架け渡されており、これらを連結している。鉛直プレート83は、鉛直方向に延びる板状の部材である。鉛直プレート83の下部は、その内面(後方Bの表面)が嵌合部86の外面(前方Fの表面)に固定されている。
【0034】
第2アーム部84は、鉛直プレート83の上部に支持されている。具体的には、第2アーム部84の後方Bの端部は、鉛直プレート83の上部における前方Fの表面に固定されている。第2アーム部84は、鉛直プレート83から前方Fに延び、前端部から右方Rに屈曲しており、平面視でL字形状を有している。第2アーム部84の屈曲部84aには、後述する作業ユニット20が取り付けられている。第2アーム部84の屈曲部84aから右方Rに延びた先端部である右端部84bには、後述する観察部30とレーザーポインタ51とが取り付けられている。
【0035】
以上のような構成を有していることにより、作業者は、把持部91bを持って軸部91aを回動させることにより、スライド軸93を上下動させ、作業ユニット20と観察部30とレーザーポインタ51とを一体的に上下方向にスライド移動させることができる。これにより、作業者は、後述する部品ピックアップ位置(上端位置)と、部品着脱位置(下端位置)とを切り換えることができる。
【0036】
<基板保持部>
基板保持部19は、基板13と作業軸Aとが交わるように基板13を保持することができる。基板保持部19は、ベースレール部67と、第1調整機構69と、第2調整機構70と、一対の支持レール部68(68A,68B)とを備えている。
【0037】
ベースレール部67は、4つのレールがベース41の貫通部41aの4つの縁に沿って矩形状に配置され、隣り合う端部同士が互いに固定されることにより一体化されたものである。貫通部41aの右方Rに配置されたレールと左方Lに配置されたレールには、上面に長手方向に沿って延びる上溝部65が形成されている。
【0038】
第1調整機構69は、ベース41に対するベースレール部67の左右方向の位置を微調整するためのものであり、第2調整機構70は、ベース41に対するベースレール部67の前後方向の位置を微調整するためのものである。
【0039】
第1調整機構69は、ベース41の上面に固定された固定部材615と、ベースレール部67の外側面に固定された可動部材616と、固定部材615と可動部材616との間の間隔を調整する調整機構とを有している。固定部材615は、L字形状の断面を有する板状の部材である。調整機構は、固定部材615と可動部材616との間に設けられ、両サイドに配置された一対の付勢部材を含む。これらの付勢部材は、例えばばねなどによって構成されており、固定部材615に対して可動部材616が離れる方向に可動部材616を付勢している。前記調整機構は、固定部材615の起立部に設けられた貫通孔に挿通された軸部材619をさらに含む。この軸部材619の外面には雄ねじが形成されている。前記調整機構は、軸部材619に螺合されたナット部材617をさらに含む。
【0040】
軸部材619の内端部(可動部材616側の端部)は、可動部材616の平板部に固定されたナット618に螺合されている。軸部材619の外端部は、固定部材615の起立部よりも外側に突出しており、この突出部分にナット部材617が螺合されている。このナット部材617を右回転又は左回転させることにより、固定部材615と可動部材616との距離が調整され、それに伴ってベース41に対するベースレール部67の左右方向の位置が微調整される。
【0041】
なお、第2調整機構70は、ベース41に対するベースレール部67の前後方向の位置を微調整する点を除き、第1調整機構69と同様の構造を有しているので、詳細な説明は省略する。第2調整機構70のナット部材617を右回転又は左回転させることにより、固定部材615と可動部材616との距離が調整され、それに伴ってベース41に対するベースレール部67の前後方向の位置が微調整される。
【0042】
支持レール部68A,68Bは、ベースレール部67に対してスライド移動可能にベースレール部67に支持されている。各支持レール68は、上面に長手方向に沿って延びる溝部71を有している。
【0043】
各支持レール68の溝部71には、この溝部71に沿って長手方向にスライド移動可能な一対の載置部72,72が設けられている。各載置部72は、上部にねじを有しており、このねじの右回転又は左回転によって、支持レール68に対して固定された状態又はスライド移動可能な状態となる。各載置部72は、内側に棒状に突出する突出部63と、突出部63に隣接する上部に設けられた板ばね部64とをさらに有している。したがって、基板保持部19は、合計4つの突出部63と、合計4つの板ばね部64とを有している。
【0044】
基板13の大きさ及び基板13上の部品17の位置に応じて各支持レール68の位置が支持レール調節ノブ622により調節され、各載置部72の位置が調節される。そして、基板13は、その周縁部が4つの突出部63上に載置されるとともに、板ばね部64によって内側に付勢される。これにより、基板13は基板保持部19に安定した状態で保持される。
【0045】
<作業ユニット>
図3に示すように、作業ユニット20は、支軸26と、ユニット本体27と、4つのヘッド装着部29と、各ヘッド装着部29の位置を微調整するための微調整機構28(28A,28B,28C)と、複数の作業ヘッドとを有している。複数の作業ヘッドは、部品17を吸着する吸着作業部としての吸着ヘッド22と、はんだを加熱する加熱作業部としての加熱ヘッド21とを含む。
【0046】
支軸26は、上下方向に延びる柱状の部材である。その上端部が第2アーム部84の屈曲部84aに固定されており、屈曲部84aから下方に延びている。支軸26の延びる方向は、作業軸Aに平行である。
【0047】
ユニット本体27は、支軸26を中心に回動可能に支軸26に支持されている。ユニット本体27は、作業軸Aにほぼ平行な4つの側面を有する角柱形状を有している。これらの側面には、ヘッドスライド機構95を介してヘッド装着部29がそれぞれ支持されている。
【0048】
4つのヘッド装着部29には、図4(A)〜(E)に示すような作業ヘッドが装着される。これらのヘッド装着部29は、支軸26を中心とする周方向に沿って互いに間隔をあけた状態でユニット本体27に支持されている。隣り合うヘッド装着部29同士は、支軸26を中心とする角度が90°となる位置に配置されている。これらのヘッド装着部29は、ユニット本体27の回動に伴って支軸26を中心とする円軌道T1(図6参照)に沿って一体的に動作する。ヘッド装着部29は、上下方向に貫通する装着孔29aを有している。各作業ヘッドは、装着孔29aに挿入される。
【0049】
各ヘッドスライド機構95は、ユニット本体27の各側面に設けられたガイドレール951と、ガイドレール951に嵌合する凹部を有する嵌合部952と、ヘッド装着部29を退避位置(上位置)において係止するためのストッパ953と、このストッパ953の先端が入り込む係止穴954とを含む。各ガイドレール951は、上下方向に延びている。嵌合部952は、ガイドレール951に沿って上下方向にスライド移動可能である。図3は、各ヘッド装着部29が作業位置(下位置)に配置されている状態を示している。
【0050】
各微調整機構28は、第1板部材281、第2板部材282、第3板部材283、ねじ部材B1及びカムC1,C2を備えている。各微調整機構28は、ヘッド装着部29の上下方向の位置を微調整する第1機構28Aと、ヘッド装着部29の水平方向の位置を微調整する第2機構28Bと、この第2機構28Bに対して直交する方向においてヘッド装着部29の水平方向の位置を微調整する第3機構28Cとを含む。各微調整機構28は、作業ヘッドの先端部の位置を作業ポイントPに正確に調整可能である。
【0051】
第1板部材281は、ユニット本体27の下面から下方に延びている。第1板部材281は、ガイドレール951の内側に隣接して配置され、ユニット本体27の対応する側面に平行な姿勢で配置された板状の部材である。第1板部材281は、その下端部において屈曲し、外側に向かって突出する突出部281aを有している。
【0052】
第2板部材282は、嵌合部952の外面に平行な姿勢でこの外面に固定されている。第2板部材282は、その下端部において屈曲し、内側に向かって突出する突出部282aを有している。第2板部材282の突出部282aは、第1板部材281の突出部281aの上方に位置しており、第1板部材281の突出部281aと上下方向に対面するように配置されている。
【0053】
第3板部材283は、第2板部材282の外側に隣接して配置されている。この第3板部材283は、第2板部材282に平行であり第2板部材282に面接触している当接部283aと、この当接部283aの両サイドから外側に突出する一対の突出片283b,283cとを有している。
【0054】
第3板部材283は、当接部283a内に位置する回動中心R1において第2板部材282に対して回動可能に第2板部材282に支持されている。一対の突出片283b,283cは、互いに所定の間隔をあけて対向配置され、作業ヘッドが作業軸A上にあるときに左右方向に平行な板状の部位であり、これらの間にはヘッド装着部29が配置されている。ヘッド装着部29は、一方の突出片283b内に位置する回動中心R2と、他方の突出片283c内に位置する回動中心R3において、第3板部材283に対して回動可能に第3板部材283に支持されている。
【0055】
ねじ部材B1は、上下方向に延びる棒状の部材であり、外面に雄ねじが形成されている。このねじ部材B1は、第2板部材282の突出部282aに設けられた貫通孔に挿通されている。この貫通孔には雌ねじが形成されている。ねじ部材B1の下端部は、第1板部材281の突出部281aの上面に固定されている。
【0056】
したがって、作業者は、ねじ部材B1を回動させることにより、第1板部材281に対して第2板部材282を上下方向に移動させることができる。これにより、第1機構28Aでは、第3板部材283を介して第2板部材282に支持されたヘッド装着部29の上下方向(作業軸A方向)の位置を微調整することができる。
【0057】
カムC1は、中心軸が偏心した円形を有しており、回動中心R4が水平方向の一方に偏心した位置にある。カムC1は、第2板部材282に回動可能に支持されている。第3板部材283の当接部283aの一部(上部)は、突出片283bを超えた位置まで延びており、この部位には、カムC1の外周面の一部を包み込むようにカムC1に嵌り込む凹部(嵌合部)が形成されている。この凹部は、カムC1の円形状の外周面よりも若干大きな内周面を有している。第3板部材283は、前述した回動中心R1とカムC1とにおいて第2板部材282に支持されている。
【0058】
したがって、作業者は、上記のように偏心したカムC1を回動中心R4において回動させることにより、回動中心R4の反対側の部位が上方又は下方に変位して第3板部材283の凹部の内周面を押圧し、第3板部材283が回動中心R1を中心に上下方向に移動する。これにより、第2機構28Bでは、ヘッド装着部29の水平方向の位置を微調整することができる。
【0059】
カムC2は、カムC1と同様に、中心軸が偏心した円形を有しており、回動中心R5が水平方向の一方に偏心した位置にある。カムC2は、ヘッド装着部29に回動可能に支持されている。第3板部材283の突出片283bの先端部には、カムC2の外周面の一部を包み込むようにカムC2に嵌り込む凹部(嵌合部)が形成されている。この凹部は、カムC2の中心軸が偏心した円形の外周面よりも若干大きな内周面を有している。ヘッド装着部29は、前述した回動中心R2,R3とカムC2とにおいて第3板部材283に支持されている。
【0060】
したがって、作業者は、上記のように偏心したカムC2を回動中心R5において回動させることにより、回動中心R5の反対側の部位が上方又は下方に変位して第3板部材283の突出片283bにおける凹部の内周面を押圧し、ヘッド装着部29が回動中心R2,R3を中心に上下方向に移動する。これにより、第3機構28Bでは、第2機構28Bに対して直交する方向においてヘッド装着部29の水平方向の位置を微調整することができる。
【0061】
ストッパ953は、第2板部材282に対して直交する方向に延びる棒状の部材であり、その長手方向において第2板部材282に対して変位可能に第2板部材282に支持されている。具体的には、ストッパ953は、第2板部材282よりも外側に突出する部位、すなわち作業者が把持する把持部位と、第2板部材282よりも内側に突出する部位とを有している。ストッパ953は、図略のばねなどの付勢部材によって第2板部材282よりも内側に付勢されている。
【0062】
各ヘッドスライド機構95の係止穴954は、ユニット本体27の側面に形成されている。係止穴954は、ストッパ953の上方に位置している。ユニット本体27の側面には、ストッパ953と係止穴954の間に領域に下方に向かうほど内側に位置するように傾斜する傾斜面27aが形成されている。
【0063】
したがって、作業者は、ヘッドスライド機構95のガイドレール951に沿ってヘッド装着部29を上下方向にスライド移動させることができる。そして、作業者は、部品ピックアップ作業、部品取り付け作業又は取り外し作業に使用しない作業ヘッドを上方にスライド移動させ、ストッパ953を係止穴954に嵌合させることにより、このヘッド装着部29に装着された作業ヘッドを退避位置(上位置)に退避させることができる。作業ヘッドの上方への移動時には、ストッパ953の内端部が傾斜面27aに当接しながら傾斜面27aに押圧されて内側への突出量が減少しながら係止穴954に導かれる。
【0064】
また、作業者は、部品ピックアップ作業、部品着脱作業(部品取り付け作業又は取り外し作業)に使用する作業ヘッドについては、ストッパ953の前記把持部位を持って引き動作をすることにより、ストッパ953と係止穴954との係合を解除し、ヘッド装着部29を下方にスライド移動させることにより、このヘッド装着部29に装着された作業ヘッドを作業位置(下位置)に配置することができる。
【0065】
図4(A)は、加熱ヘッド21がヘッド装着部29に装着された状態を示す側面図である。図4(B)〜(E)は、ユニット本体27の4つのヘッド装着部29に装着された作業ヘッドの組合せ例を示す平面図であり、図4(F)〜(I)は、その正面図である。具体的には、図4(B),(F)は加熱ヘッド21を示し、図4(C),(G)は吸着ヘッド22を示し、図4(D),(H)ははんだ塗布ヘッド23を示し、図4(E),(I)ははんだ吸取ヘッド24を示している。各図において、作業軸Aと基板13又は部品テーブル43とが交わる部位は、各作業が行われる作業ポイントPである。
【0066】
図4(A)に示すように、加熱ヘッド21は、ヘッド装着部29の装着孔29aに挿入されて支持される柱状のヘッド本体211と、このヘッド本体211から下方に延びる加熱部212と、ヘッド本体211から上方に延びる熱源供給部213とを有している。図4(A),(B),(F)に示す加熱ヘッド21としては、例えばホットエアヘッド21、はんだこてヘッド21などを用いることができる。
【0067】
この加熱ヘッド21は、基板13に部品17を接合するはんだを溶融させるための熱源である。ホットエアヘッド21の場合、はんだ、部品17及び基板13に対して非接触の状態ではんだに熱を供給することができる。具体的には、ホットエアヘッド21の加熱部212の先端(下端)をはんだに近接する位置に配置し、この状態で熱源供給部213を通じて供給されるホットエアを加熱部212からはんだに向けて供給すればよい。はんだこてヘッド21を用いる場合には、はんだこてヘッド21の加熱部212の先端(下端)をはんだに当接する位置に配置し、この状態で熱源供給部213を通じて供給される電力により昇温された加熱部212の先端からはんだに熱を供給すればよい。なお、ホットエアヘッド21とはんだこてヘッド21とは、ヘッド本体211を共用し、先端の加熱部212のみを交換する構造を採用することもできる。
【0068】
図4(C),(G)に示す吸着ヘッド22は、先端(下端)又はその近傍に空気を吸い込む図略の吸着部を有している。吸着ヘッド22の上端部は、図略のチューブによって図5に示す吸引手段(バキューム)97に接続されている。吸引手段97を作動させることにより、吸着ヘッド22の吸着部から空気が吸い込まれるので、部品17を吸着部に吸着することができる。
【0069】
図4(D),(H)に示す塗布ヘッド23は、クリームはんだ(フラックス)を基板13や部品17に塗布するためのものである。この塗布ヘッド23の上端部は、図略のチューブによって図略のクリームはんだ供給手段に接続されている。この供給手段から塗布ヘッド23にクリームはんだを送り込むことにより、塗布ヘッド23の先端(下端)からクリームはんだが吐出される。これにより、基板13や部品17にクリームはんだを塗布することができる。
【0070】
図4(E),(I)に示すはんだ吸取ヘッド24は、基板13又は部品17に付着したはんだを吸い取るためのものである。吸取ヘッド24は、前述の吸着ヘッド22と同様に、吸引手段に接続されており、先端(下端)からはんだを吸い込むことができる。
【0071】
作業ユニット20では、これらの4つの作業ヘッド21〜24が支軸26を中心とする円軌道T1に沿って一体的に動作して各作業ヘッド部の位置が変更される。これにより作業軸A上に配置される作業ヘッドが複数の作業ヘッド21〜24から選択される。
【0072】
<観察部>
図1及び図2に示すように、観察部30は、回動機構31と、観察部本体としてのカメラ(映像撮影装置)32とを備えている。カメラ32は、回動機構31に支持されている。カメラ32は、作業ポイントPを斜め上方から観察可能な姿勢で回動機構31に支持されている。カメラ32としては、例えばマイクロスコープなどを用いることができる。カメラ32によって撮影された画像は、作業者がリアルタイムで確認できるように、例えば図略のモニターに映し出される。また、観察部30は、カメラ32が作業ポイントPを斜め上方から観察するときの水平方向に対する傾斜角度を変更可能な傾斜角度調節機構をさらに備えている。
【0073】
図5に示すように、観察部30は、作業軸Aと基板13又は部品テーブル43とが交わる作業ポイントPを拡大観察する。作業ポイントPは、作業軸Aと基板13とが交わる作業ポイントP1と、作業軸Aと部品テーブル43とが交わる作業ポイントP2とを含む。
【0074】
図4(A)に示すように、作業ユニット20、観察部30及びレーザーポインタ51が部品着脱位置(下位置)にあるときには、基板13に部品17が取り付け又は取り外しされるので、作業ポイントP1においてこれらの作業が行われる。一方、図5に示すように、作業ユニット20、観察部30及びレーザーポインタ51が部品ピックアップ位置(上位置)にあるときには、部品テーブル43から部品17がピックアップされるので、作業ポイントP2においてこの作業が行われる。
【0075】
回動機構31は、第2アーム部84に対して上下方向の中心軸を中心として回動可能であり、かつカメラ32を支持可能な部材である。具体的には、回動機構31は、第2アーム部84の上面に載置された水平板31aと、この水平板31aの側縁に固定され、下方に延びる鉛直板31bとを含む。水平板31aは、作業軸Aに一致する回動中心において図略のシャフトなどの支持部材を介して第2アーム部84の右端部84bに回動可能に支持されている。鉛直板31bの下端部には、作業ポイントPを中心とする円弧に沿った円弧状のスリット31cが形成されている。
【0076】
カメラ32は、鉛直板31bに固定される基端部32aと、この基端部32aから斜め下方に延びる円柱形状のカメラレンズ組品32bと、一対のガイドピン32c,32dと、止めねじ32eとを含む。このカメラレンズ組品32bは、作業ポイントPに向かって延びている。一対のガイドピン32c,32d及び止めねじ32eは、基端部32aの側部に取り付けられている。
【0077】
一対のガイドピン32c,32dは、鉛直板31bのスリット31cに挿通され、互いに間隔をあけて配置されており、スリット31cの範囲内においてスライド移動可能である。ガイドピン32c,32dは、基端部32a及びカメラレンズ組品32bを回動機構31に連結している。スリット31cは、作業ポイントPを中心とする円弧形状であるので、例えば図5に示すようにガイドピン32c,32dのスライド移動前の位置32A、スライド移動後の位置32B、及びこれらの間の位置において、カメラ32は、作業ポイントPを観察可能である。
【0078】
前記傾斜角度調節機構は、スリット31c、ガイドピン32c,32d、止めねじ32eを含む。この傾斜角度調節機構を備えていることにより、カメラ32のカメラレンズ組品32bの傾斜角度を、作業ポイントPを中心とするスリット31cの円弧軌道に沿って変更することができる。カメラ32のカメラレンズ組品32bの傾斜角度及びその変更範囲については特に限定されるものではない。具体例を挙げると、水平方向に対するカメラレンズ組品32bの傾斜角度は、10°〜80°の範囲で調整できるのが好ましく、20°〜70°の範囲で調整できるのがより好ましい。図5に示す実施形態では、前記傾斜角度が40°〜65°の範囲で調整できる場合を例示している。
【0079】
止めねじ32eは、一対のガイドピン32c,32dの間に配置されている。止めねじ32eは、スリット31cに挿通され、外面に雄ねじが形成された軸部と、この軸部の端部に螺合された雌ねじが内面に形成されたと把持部とを有している。この把持部を右回転又は左回転させることにより、一対のガイドピン32c,32dのスライド移動が規制又は規制解除され、カメラ32が回動機構31に対して固定又は固定解除される。
【0080】
図6に示すように、回動機構31は作業軸Aを中心に回動する。カメラ32は、回動機構31の回動に伴って作業軸Aを中心とする円弧軌道T2に沿って移動して作業ポイントPを観察する方向が変更される。カメラ32は、回動機構31の回動中において斜め上方からの観察姿勢を維持する。本実施形態の回動機構31では、図6に示すように作業軸Aを中心に回動可能な角度が180°である。これにより、例えば正面、背面、側面などの広範囲から作業ポイントPを観察できる。
【0081】
レーザーポインタ51は、第2アーム部84及び回動機構31の水平板31aの上方に配置されている。レーザーポインタ51の下方に位置する第2アーム部84、水平板31aなどの部材は、レーザー光が作業ポイントPに届くように、作業軸Aに沿った貫通孔を有している。レーザーポインタ51の下端部からは作業軸Aに一致し作業ポイントPを通るレーザー光が下方に向かって出される。したがって、作業者は、このレーザー光によって作業ポイントPのおおまかな位置を目視で確認できる。
【0082】
<部品テーブル>
図1及び図2に示すように、部品テーブル43は、第3アーム部88を介して支柱81に支持されている。第3アーム部88の基端部は、支柱81を中心に回動可能に支柱81に支持されている。部品テーブル43は、作業軸Aを中心に回動可能に第3アーム部88の先端部に支持されている。第3アーム部88の基端部には、この第3アーム部88の回動の規制及び規制解除をするレバー98が設けられている。
【0083】
図7(A)に示すように、部品テーブル43は、作業軸Aと交わる作業位置43Aと、作業軸Aとは交わらない退避位置43Bとの間を移動可能である。本実施形態では、支柱81を中心とする第3アーム部88の回動範囲は約90°である。部品テーブル43の上面には、複数の新しい部品17が配列されたテープ18を載置する載置凹部が形成されている。載置凹部に載置されたテープ18は、載置凹部にまたがるように配設された一対の留め具によって位置決めされている。部品テーブル43は、作業軸Aを中心に少なくとも90°回動可能である。これにより、作業位置43Aにおいて新しい部品17を所望の向きに調節できる。
【0084】
部品テーブル43は、左右方向の位置を微調整するための微調整機構44と、前後方向の位置を微調整するための微調整機構45とを備えている。これにより、作業位置43Aにおいて、載置凹部に載置されたテープ18上の部品17を作業軸Aに正確に一致させることができる。
【0085】
<リワーク作業の流れ>
次に、上記したリワーク装置11を用いたリワーク作業の一例について説明する。
【0086】
(1)作業者は、基板保持部19に基板13をセットする。
ついで、作業者は、レーザーポインタ51によってレーザー光を照射し、作業ポイントPに対する基板13のおおまかな位置を合わせる。
【0087】
(2)作業者は、上下レバー91を操作し、第2アーム部84を部品着脱位置(下端位置)へ移動させる。
ついで、作業者は、観察部30を用いて、作業軸A上の作業ポイントPに基板13の作業対象部位(リワークポイント)があるか否か確認する。このとき、回動機構31を0°〜180°の範囲において回動させ、例えば正面、背面、側面などの3方向から観察し、ずれがある場合には、第1調整機構69及び第2調整機構70を用いて前後方向、左右方向の基板13の位置調整を行う。
次に、基板13上の部品17を取り外す作業が必要な場合には、作業者は、下記作業(3),(4)を行い、基板13上の部品17を取り外す作業が不要である場合には、作業者は、作業(3),(4)を省略し、下記作業(5)を行う。
なお、以下の作業において、微小な位置ずれを調整するとき、基板13上のランドを選択するとき等には、基板保持部19、部品テーブル43の微調整機構44,45を用いて位置を微調整する。
【0088】
(3)作業者は、作業ユニット20を回動させ、はんだこてヘッド21、ホットエアヘッド21などの加熱ヘッド21を作業軸A上に配置する。この状態では、ユニット本体27に装着された4つの作業ヘッドは、すべて退避位置(上位置)に配置されている。ついで、作業者は、加熱ヘッド21に対応するストッパ953を引いてストッパ953と係止穴954との係合を解除して加熱ヘッド21を作業位置(下位置)にスライド移動させる。
ついで、作業者は、観察部30を用いて、加熱ヘッド21の先端の位置と、作業対象の部品17の位置とを確認しながら、各微調整機構28を用いて加熱ヘッド21の位置を微調整する。はんだこてヘッド21を用いる場合には、その先端を作業対象の部品17に当接させる。ホットエアヘッド21を用いる場合には、その先端を作業対象の部品17に近接させる。これにより、加熱ヘッド21の熱により部品17と基板13とを接合するはんだが溶融する。はんだが溶融すると、そのはんだの表面張力により部品17が加熱ヘッド21の先端に付着するので、この状態で加熱ヘッド21を上昇させることにより部品17を基板13から取り外すことができる。
【0089】
(4)作業者は、作業ユニット20を回動させ、吸取ヘッド24を作業軸A上に配置する。ついで、作業者は、吸取ヘッド24に対応するストッパ953を引いてストッパ953と係止穴954との係合を解除して吸取ヘッド24を作業位置(下位置)にスライド移動させる。
ついで、作業者は、観察部30を用いて、吸取ヘッド24の先端の位置と、部品17が取り外された領域のランドの位置とを確認しながら、各微調整機構28を用いて吸取ヘッド24の先端をランドに当接させる。そして、ランドに残存しているはんだを吸取ヘッド24によって吸い取って基板13上から除去する。
【0090】
(5)作業者は、作業ユニット20を回動させ、塗布ヘッド23を作業軸A上に配置する。ついで、作業者は、観察部30を用いて、塗布ヘッド23の先端の位置と、ランドの位置とを確認しながら、各微調整機構28を用いて塗布ヘッド23の位置を調整した後、ランドにクリームはんだを塗布する。
【0091】
(6)作業者は、上下レバー91を操作し、第2アーム部84を部品ピックアップ位置(上端位置)へ移動させる。ついで、作業者は、第3アーム部88を回動させ、部品テーブル43を作業位置43Aに配置する。
ついで、作業者は、観察部30を用いて、作業軸A上に対象の部品17(ピックアップポイント)があるか否かを確認する。このとき、回動機構31を0°〜180°の範囲において回動させ、例えば正面、背面、側面などの3方向から観察し、これらの位置関係にずれがある場合には、微調整機構44,45を用いて、部品テーブル43の前後方向及び左右方向の位置調整を行う。
【0092】
(7)作業者は、作業ユニット20を回動させ、吸着ヘッド22を作業軸A上に配置する。ついで、作業者は、観察部30を用いて、吸着ヘッド22の先端(吸着部)の位置と、テープ18上の新しい部品17の位置とを確認しながら、各微調整機構28を用いて吸着ヘッド22の位置を調整した後、吸着ヘッド22により部品17を吸着する。このように部品17を吸着した状態で、各微調整機構28を用いて吸着ヘッド22を上方に少し上昇させる。
【0093】
(8)作業者は、第3アーム部88を回動させ、部品テーブル43を退避位置43Bに配置する。ついで、作業者は、上下レバー91を操作し、第2アーム部84を部品着脱位置(下端位置)へ移動させる。
ついで、作業者は、観察部30を用いて、吸着ヘッド22に吸着された部品17の位置と、ランドの位置とを確認しながら、各微調整機構28を用いてこれらの位置を合わせ、各微調整機構28を用いて吸着ヘッド22を下方に少し下降させることによりランドに部品17を配置する。
【0094】
(9)作業者は、作業ユニット20を回動させ、加熱ヘッド21を作業軸A上に配置する。前述と同様にして加熱ヘッド21と部品17との位置を調整した後、加熱ヘッド21の熱によりはんだを溶融させ、部品17を基板13にはんだ付けする。なお、加熱ヘッド21による加熱工程では、前述した補助加熱機構53を併用してもよい。
【0095】
<実施形態の概要>
以上の実施形態をまとめると次のようになる。
【0096】
本実施形態では、部品の取り外し作業及び取り付け作業において、吸着ヘッド22により部品17を吸着して部品17の配置及び移動を行うことができ、また、加熱ヘッド21によりはんだなどの接合材を加熱溶融させて部品17を基板13上に接合し、又は部品17を基板13から取り外すことができる。また、作業ユニット20では、前記複数の作業ヘッドが予め定められた軌道に沿って一体的に動作して各作業ヘッドの位置が変更されることにより前記作業軸A上に配置される作業ヘッドを前記複数の作業ヘッドから選択可能であるので、各作業の作業性に優れ、しかも複数の異なる作業工程(吸着工程、加熱工程など)を単一の装置により実現できる。
【0097】
また、本実施形態では、観察部30によって作業ポイントPを拡大観察しながら微小部品17のリワーク作業を行うことができる。しかも、この観察部30の観察部本体32は、回動機構31の回動に伴って前記円弧軌道T2に沿って移動して作業ポイントPを観察する方向が変更される。すなわち、観察部本体32を前記円弧軌道T2上の異なる位置に配置することができ、これらの位置において作業ポイントPをそれぞれ観察することによって作業ポイントPを異なった方向から観察できる。したがって、この構成では、部品17、基板13及び作業ヘッドの位置を精度よく合わせることができる。
【0098】
また、本実施形態では、観察部本体32は、回動機構31の回動に伴って斜め上方からの観察を維持しつつ前記円弧軌道T2に沿って移動するので、例えば水平方向に作業ポイントPを観察する場合に比べて作業ポイントPに位置する部品17、基板13、作業ヘッド及び接合材をより立体的に観察することができる。これにより、位置合わせの精度をより高めることができる。また、斜め上方からの観察であるので、基板13上に供給される接合材の量や形状、部品17が基板13上に接合された後の接合材の形状(フィレット)などの接合材の状態を立体的に正確に判別することができる。
【0099】
また、本実施形態では、リワーク装置11において、観察部30は、観察部本体32が作業ポイントPを観察するときの水平方向に対する傾斜角度を変更可能な傾斜角度調節機構をさらに備えているので、傾斜角度の変更に伴って作業ポイントを観察する角度を変更することができる。
【0100】
また、本実施形態では、ユニット本体27を回動させることにより作業軸A上に配置する作業ヘッドを選択できるので、例えば複数の作業ヘッドが一方向に直線状に配列され、この一方向の直線軌道に沿って複数の作業ヘッドを一体的に動作させる場合に比べて、複数の作業ヘッドを配置するのに必要なスペースが前記一方向に大きくなるのを抑制でき、コンパクト化を図ることができる。また、作業ユニット20が作業軸Aと平行な支軸を中心に回動する構造であるので、この作業ユニット20にその周方向に沿って複数の作業ヘッドを支持させれば、円軌道T1上を移動する各作業ヘッドは、作業ユニット20の回動時に必ず作業軸Aを通過する。
【0101】
また、本実施形態では、回動機構31の回動可能な角度が180°であることにより、例えば正面、背面、側面などの広範囲から作業ポイントPを観察できるので、死角となる領域が少なくなり、基板13上に部品17を接合する接合材の状態をさらに正確に判別することができる。
【0102】
また、本実施形態では、作業ユニット20は、前記作業軸A上に配置される作業ヘッドの位置を前記作業軸A方向に微調整する微調整機構を有しているので、各作業ヘッドの位置をより精度よく調整できる。
【0103】
また、本実施形態では、退避位置において部品テーブル上に部品が載置され、この部品17が作業位置において吸着ヘッド22によって吸着される。この作業位置では、部品17が吸着される前に、作業軸Aを中心に部品テーブル43を少なくとも90°の範囲で回動させることができるので、吸着時の部品17の向きを所望の向きに予め調節できる。
【0104】
また、本実施形態では、レーザーポインタ51によっておおまかな作業軸Aの位置を目視できるので、予め手作業によっておおまかな位置調整が可能となり、作業性がさらに向上する。
【0105】
また、本実施形態では、補助加熱機構53をさらに備えているので、加熱に要する時間を短縮できるので作業のスピードアップが図れ、また、リワーク範囲を広げることができる。
【0106】
本実施形態の他の利点としては、次の項目が挙げられる。
【0107】
前記作業ユニット20が円軌道T1に沿って一体的に動作する構成の場合、前記回動機構31における前記作業軸Aを中心に回動可能な最大角度を180°又はこれより大きくすることが可能になる。例えば、複数の作業ヘッドが前記一方向に直線状に配列されている構成の場合には、この直線軌道が邪魔になるので回動機構の回動可能な最大角度を180°未満にせざるを得ない。
【0108】
回動機構31の回動可能な最大角度が180°又はこれより大きいことにより、例えば正面、背面、側面などの広範囲から作業ポイントPを観察できるので、死角となる領域が少なくなり、基板13上に部品17を接合する接合材の状態をさらに正確に判別することができる。
【0109】
また、本実施形態では、一連の作業を行う各作業ヘッドが支軸を中心にユニット本体27に取り付けられており、作業軸Aの位置に移動させることができるコンパクトな構造を有しており、また、本実施形態では、各作業ヘッドはヘッド装着部29に固定されているわけではなく、適宜組み合わせを変えることができる。また、市販の工具をヘッド装着部29に取り付けることもできる。
【0110】
本実施形態では、カメラは1台であるが、作業軸Aを中心に0°〜180°の範囲において回転観察可能であり、部品ピックアップポイント、作業ポイントでの前後方向及び左右方向の位置確認が容易である。これにより、各作業のスピードアップが可能になる。
【0111】
以上、本発明の実施形態に係る表面処理装置について説明したが、本発明は、前記実施形態に限定されるものではなく、その趣旨を逸脱しない範囲で種々変更、改良等が可能である。
【0112】
前記実施形態では、作業ユニットが支軸を中心に回動する構成を例示したが、これに限定されない。作業ユニットは、例えば複数の作業ヘッドが一方向に直線状に配列され、この一方向の直線軌道に沿って複数の作業ヘッドを一体的に動作させるような構成であってもよい。
【0113】
前記実施形態では、観察部本体が作業ポイントを斜め上方から観察する場合を例示したが、これに限定されない。例えば、観察部本体が作業ポイントを水平方向に観察するような形態であってもよい。
【0114】
前記実施形態では、単一のスライド機構92によって作業ユニット20と観察部30とレーザーポインタ51とが一体的に上下方向にスライド移動する場合を例示したが、これに限定されない。作業ユニット20、観察部30及びレーザーポインタ51は、別々のスライド機構によって上下方向に移動する形態であってもよい。また、作業軸Aと基板13とが交わる作業ポイントP1と、作業軸Aと部品テーブル43とが交わる作業ポイントP2とが同じ位置にある場合には、スライド機構92を省略して作業ユニット20、観察部30及びレーザーポインタ51が上下方向に移動しない形態であってもよい。
【0115】
前記実施形態では、部品テーブル43を備えている場合を例示したが、この部品テーブル43は、必ずしもリワーク装置11に含まれていなくてもよい。
【0116】
前記実施形態では、観察部30の回動機構31が0〜180°の範囲で回動する場合を例示したが、円弧軌道上の複数箇所において観察できればよいので、回動機構31の回動範囲は、180°未満(例えば0〜90°の範囲など)であってもよい。
【符号の説明】
【0117】
11 リワーク装置
13 基板
17 部品
19 基板保持部
20 作業ユニット
26 支軸
27 ユニット本体
28 微調整機構
30 観察部
31 回動機構
32 観察部本体
41 ベース
43 部品テーブル
51 レーザーポインタ
53 補助加熱機構
A 作業軸
P 作業ポイント
【特許請求の範囲】
【請求項1】
基板上に接合材によって接合された部品を取り外す作業及び前記基板上に部品を取り付ける作業を行うリワーク装置であって、
前記基板が作業軸と交わるように前記基板を保持する基板保持部と、
前記部品を吸着する吸着作業部及び前記接合材を加熱する加熱作業部を含む複数の作業部を有する作業ユニットと、
前記作業軸と前記基板とが交わる作業ポイントを拡大観察する観察部と、を備え、
前記作業ユニットでは、前記複数の作業部が予め定められた軌道に沿って一体的に動作して各作業部の位置が変更されることにより前記作業軸上に配置される作業部が前記複数の作業部から選択され、
前記観察部は、前記作業軸を中心に回動可能な回動機構と、前記回動機構に支持され、前記回動機構の回動に伴って前記作業軸を中心とする円弧軌道に沿って移動して前記作業ポイントを観察する方向が変更される観察部本体と、を備え、
前記作業を単一の前記作業軸上において行うリワーク装置。
【請求項2】
前記観察部本体は、前記作業ポイントを斜め上方から観察可能な姿勢で前記回動機構に支持されており、前記回動機構の回動に伴って斜め上方からの観察姿勢を維持しつつ前記円弧軌道に沿って移動して前記作業ポイントを観察する方向が変更される、請求項1に記載のリワーク装置。
【請求項3】
前記観察部は、前記観察部本体が前記作業ポイントを観察するときの水平方向に対する傾斜角度を変更可能な傾斜角度調節機構をさらに備えている、請求項1に記載のリワーク装置。
【請求項4】
前記作業ユニットは、前記作業軸に平行な支軸と、前記支軸を中心に回動可能に前記支軸に支持されたユニット本体とをさらに有し、
前記複数の作業部は、前記支軸を中心とする周方向に沿って互いに間隔をあけて配置された状態で前記ユニット本体に支持されており、前記ユニット本体の回動に伴って前記支軸を中心とする円軌道に沿って一体的に動作する、請求項1〜3のいずれか1項に記載のリワーク装置。
【請求項5】
前記作業ユニットは、前記作業軸上に配置される作業部の位置を前記作業軸方向に微調整する微調整機構をさらに有している、請求項1〜4のいずれか1項に記載のリワーク装置。
【請求項6】
前記基板上に取り付けるための部品が載置される部品テーブルをさらに備え、
前記部品テーブルは、前記作業軸と交わる作業位置と、前記作業軸とは交わらない退避位置との間を移動可能であり、かつ前記作業位置において前記作業軸を中心に少なくとも90°回動可能である、請求項1〜5のいずれか1項に記載のリワーク装置。
【請求項7】
前記作業軸を通る光軸を有するレーザーポインタをさらに備えている、請求項1〜6のいずれか1項に記載のリワーク装置。
【請求項8】
前記基板保持部に保持された前記基板を補助的に加熱するための補助加熱機構をさらに備えている、請求項1〜7のいずれか1項に記載のリワーク装置。
【請求項1】
基板上に接合材によって接合された部品を取り外す作業及び前記基板上に部品を取り付ける作業を行うリワーク装置であって、
前記基板が作業軸と交わるように前記基板を保持する基板保持部と、
前記部品を吸着する吸着作業部及び前記接合材を加熱する加熱作業部を含む複数の作業部を有する作業ユニットと、
前記作業軸と前記基板とが交わる作業ポイントを拡大観察する観察部と、を備え、
前記作業ユニットでは、前記複数の作業部が予め定められた軌道に沿って一体的に動作して各作業部の位置が変更されることにより前記作業軸上に配置される作業部が前記複数の作業部から選択され、
前記観察部は、前記作業軸を中心に回動可能な回動機構と、前記回動機構に支持され、前記回動機構の回動に伴って前記作業軸を中心とする円弧軌道に沿って移動して前記作業ポイントを観察する方向が変更される観察部本体と、を備え、
前記作業を単一の前記作業軸上において行うリワーク装置。
【請求項2】
前記観察部本体は、前記作業ポイントを斜め上方から観察可能な姿勢で前記回動機構に支持されており、前記回動機構の回動に伴って斜め上方からの観察姿勢を維持しつつ前記円弧軌道に沿って移動して前記作業ポイントを観察する方向が変更される、請求項1に記載のリワーク装置。
【請求項3】
前記観察部は、前記観察部本体が前記作業ポイントを観察するときの水平方向に対する傾斜角度を変更可能な傾斜角度調節機構をさらに備えている、請求項1に記載のリワーク装置。
【請求項4】
前記作業ユニットは、前記作業軸に平行な支軸と、前記支軸を中心に回動可能に前記支軸に支持されたユニット本体とをさらに有し、
前記複数の作業部は、前記支軸を中心とする周方向に沿って互いに間隔をあけて配置された状態で前記ユニット本体に支持されており、前記ユニット本体の回動に伴って前記支軸を中心とする円軌道に沿って一体的に動作する、請求項1〜3のいずれか1項に記載のリワーク装置。
【請求項5】
前記作業ユニットは、前記作業軸上に配置される作業部の位置を前記作業軸方向に微調整する微調整機構をさらに有している、請求項1〜4のいずれか1項に記載のリワーク装置。
【請求項6】
前記基板上に取り付けるための部品が載置される部品テーブルをさらに備え、
前記部品テーブルは、前記作業軸と交わる作業位置と、前記作業軸とは交わらない退避位置との間を移動可能であり、かつ前記作業位置において前記作業軸を中心に少なくとも90°回動可能である、請求項1〜5のいずれか1項に記載のリワーク装置。
【請求項7】
前記作業軸を通る光軸を有するレーザーポインタをさらに備えている、請求項1〜6のいずれか1項に記載のリワーク装置。
【請求項8】
前記基板保持部に保持された前記基板を補助的に加熱するための補助加熱機構をさらに備えている、請求項1〜7のいずれか1項に記載のリワーク装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−248650(P2012−248650A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−118682(P2011−118682)
【出願日】平成23年5月27日(2011.5.27)
【出願人】(000234339)白光株式会社 (19)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月27日(2011.5.27)
【出願人】(000234339)白光株式会社 (19)
【Fターム(参考)】
[ Back to top ]