
リング型アクチュエータ

【課題】ぬいぐるみや人形への取り付けを誰でも簡単に行うことができ、且つ、汎用性に優れたアクチュエータを提供する。
【解決手段】リング型アクチュエータ1は、ぬいぐるみ2の棒状部位20を取り巻くように取り付けられて使用される。リング型アクチュエータ1には、モータ駆動の回転部材11a,11bが設けられている。この回転部材11a,11bの回転方向及び回転量を制御することで、棒状部位20を任意の方向及び角度で屈曲させる。
【解決手段】リング型アクチュエータ1は、ぬいぐるみ2の棒状部位20を取り巻くように取り付けられて使用される。リング型アクチュエータ1には、モータ駆動の回転部材11a,11bが設けられている。この回転部材11a,11bの回転方向及び回転量を制御することで、棒状部位20を任意の方向及び角度で屈曲させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ぬいぐるみ、人形等の玩具を屈曲動作させるためのリング型アクチュエータに関する。
【背景技術】
【0002】
動物、キャラクタ等の形態を模したぬいぐるみや人形は、古くから玩具として多くの人に親しまれている。最近では、ロボティクス技術の発展に伴い、手足が動いたり顔の表情が変化したりする家庭用のぬいぐるみロボットも市販されるようになり、従来のように単なる玩具としてだけでなく、子供の教育用具やペットの代替といった新たな用途も生まれてきている。また、特許文献1〜3に述べられているように、ぬいぐるみロボットを、マン−マシンインタフェースやテレコミュニケーションツールとして利用する試みも提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−305670号公報
【特許文献2】特開2003−305669号公報
【特許文献3】特開2009−291328号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のぬいぐるみロボットにおいては、手足等の可動部位を動かすための駆動手段が内部に埋め込まれている構造が一般的であった。例えば特許文献1、2のぬいぐるみでは、モータ、遊星歯車減速機、ポテンショメータ等の機械がぬいぐるみの関節部分に埋設されている。また特許文献3では、ぬいぐるみの腕に沿って糸を通しておき、内蔵のアクチュエータで糸の巻き取り/巻出しを行うことで腕を屈曲させる構造を採用している。
【0005】
このような埋め込み構造は、ぬいぐるみや人形の外観を損なわないという利点がある一方で、ぬいぐるみや人形を解体しなければ(あるいは、ぬいぐるみを縫合したり人形を組み立てたりする前でなければ)、駆動手段の取り付けやメンテナンスを行うことができないという不利がある。また、内部に埋め込む必要から、駆動手段のサイズ、形状、構造等に物理的な制約が生じるため、個々のぬいぐるみの形に適合するように駆動手段を設計しなければならず、汎用性に欠けるという問題もある。したがって、従来は、子供や一般消費者が、所有している普通のぬいぐるみをロボットのように動かしてみたいと望んだとしても、その改造(駆動手段の埋め込み)には工学的な専門知識が必要となり、実現が容易でなかった。
【0006】
本発明はかかる実情に鑑みてなされたものであって、その目的とするところは、ぬいぐるみや人形への取り付けを誰でも簡単に行うことができ、且つ、汎用性に優れたアクチュエータを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明者らは、ぬいぐるみや人形に対して着脱自在な外付けタイプのアクチュエータを提案する。
【0008】
具体的には、本発明に係るアクチュエータは、ぬいぐるみ又は人形の棒状部位を屈曲動作させるためのリング型アクチュエータであって、前記棒状部位を取り巻くように、前記
棒状部位に対して取り付けられるリング型のアクチュエータ本体と、前記アクチュエータ本体を前記棒状部位に取り付けたときに前記棒状部位の表面に接触するように、前記アクチュエータ本体の内周に設けられた回転部材と、前記回転部材を回転させるモータと、制御部と、を有し、前記制御部が、前記モータにより前記回転部材を回転させて、前記棒状部位の表面に対し前記棒状部位の延伸方向に沿う方向の力を付与することによって、前記棒状部位を屈曲させることを特徴とするものである。
【0009】
「棒状部位」とは、ぬいぐるみや人形において、屈曲動作が可能な程度の太さ及び長さを有する部位を意味し、例えば、人又は動物を模したぬいぐるみや人形の場合は、腕、脚、首、耳、尾等が該当する。本発明のアクチュエータによれば、ぬいぐるみ等の棒状部位の周りにアクチュエータ本体を外付けするだけでよいため、誰でも簡単に取り付け/取り外しの作業を行うことができる。しかも、アクチュエータ本体が巻き付く太さであれば、どのようなぬいぐるみのどのような部位にも取り付けが可能であるため、汎用性に優れる。以下、アクチュエータが取り付けられたぬいぐるみや人形を「ロボット」と呼ぶ。
【0010】
ここで、前記アクチュエータ本体の内周に、独立に制御可能な複数の回転部材が設けられていることが好ましい。これにより、前記制御部が、回転させる回転部材を切り替えたり、あるいは回転方向(順回転/逆回転)を切り替えたりすることによって、前記棒状部位の屈曲方向を切り替えられるようになり、多様な屈曲動作を実現できるようになる。
【0011】
さらに、前記制御部が、対向する位置にある2つの回転部材を、前記棒状部位の表面に対し互いに逆方向に回転させるとよい。これにより、棒状部位の一方の面に引き方向の力、他方の面に押し方向の力が加わるため、棒状部位の屈曲動作をスムーズに行うことができる。
【0012】
前記棒状部位の屈曲を検知するセンサが前記アクチュエータ本体に設けられていることが好ましい。センサの検知結果は、例えば、モータ及び回転部材の動作の検証(動作テスト)、フィードバック制御等に利用することができる。また後述するように、ユーザが棒状部位を屈曲させるという操作を、アクチュエータに対する入力指示として利用することもできる。なお、センサ自体もアクチュエータ本体に設けられているため、ぬいぐるみに対する取り付けが容易である。
【0013】
ここで、前記センサが、前記アクチュエータ本体を前記棒状部位に取り付けたときに前記棒状部位の延伸方向に対して略平行になるように設けられたフォトリフレクタであることが好ましい。具体的には、フォトリフレクタの光軸が棒状部位の表面からやや離れ、且つ、棒状部位の延伸方向に対して略平行になるよう配置され、棒状部位が屈曲していない状態において受光量が最も小さく、棒状部位の屈曲が大きくなるほど受光量が増加するような構成である。この構成により、棒状部位に対して非接触で、棒状部位の屈曲の方向と角度を簡易的に検知することができる。
【0014】
前記制御部は、前記センサにより前記棒状部位の屈曲を検知した場合に、前記検知した屈曲動作と同じ動作を前記回転部材で実現するために必要な前記モータの駆動量を計算し、駆動データとして記憶する手段と、前記記憶した駆動データに基づいて前記モータを駆動することにより、前記検知した屈曲動作と同じ動作を前記棒状部位に再現させる手段と、を有することが好ましい。この構成によれば、ユーザが棒状部位を好きな方向及び角度で屈曲させるだけで、その屈曲動作がアクチュエータに記憶され、アクチュエータの制御によって同じ屈曲動作が再現される。これにより、誰でも、簡単かつ直観的な方法で、アクチュエータに対する入力指示、つまりはロボットに対する動作の教示を行うことができるようになる。
【0015】
さらに、第2のリング型アクチュエータと無線通信を行うための無線通信部が前記アクチュエータ本体に設けられており、前記制御部は、前記記憶した駆動データを前記無線通信部により前記第2のリング型アクチュエータに対して送信することにより、自身が取り付けられた前記棒状部位と同じ動作を前記第2のリング型アクチュエータが取り付けられた第2の棒状部位に再現させる手段と、前記無線通信部により前記第2のリング型アクチュエータから駆動データを受信した場合に、前記受信した駆動データに基づいて前記モータを駆動することにより、前記第2の棒状部位と同じ動作を前記棒状部位に再現させる手段と、を有することが好ましい。この構成によれば、複数のアクチュエータの動作、つまりは複数のロボット(あるいは1つロボットにおける複数の部位)の動きを簡単に同期させることができる。この機能は、例えば、ロボットの連係動作や、遠隔操作、ロボットを利用したテレコミュニケーションなどに利用可能である。
【発明の効果】
【0016】
本発明によれば、ぬいぐるみや人形への取り付けを誰でも簡単に行うことができ、且つ、汎用性に優れたアクチュエータを提供することが可能である。
【図面の簡単な説明】
【0017】
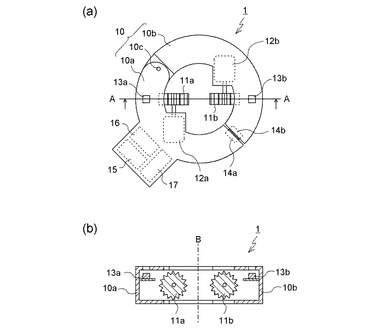
【図1】図1は、本発明の実施形態に係るリング型アクチュエータの構成を示しており、(a)は軸方向から見た平面図、(b)は(a)のA−A断面図である。
【図2】図2は、取り付け手順を説明するための図である。
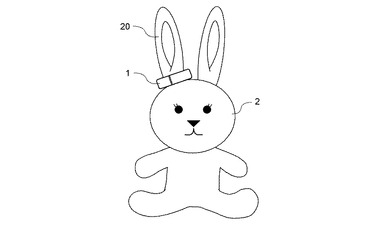
【図3】図3は、リング型アクチュエータを取り付けたぬいぐるみの例を示す図である。
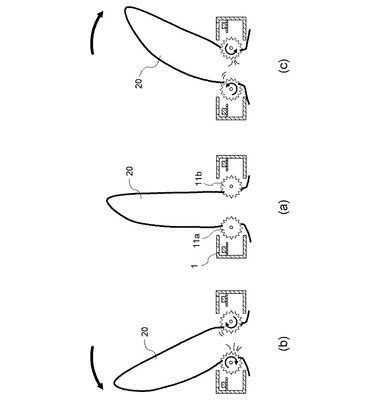
【図4】図4は、リング型アクチュエータの動作について説明するための図である。
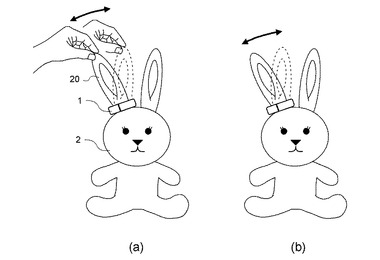
【図5】図5は、屈曲動作の登録・再現機能を説明するための図であり、(a)は屈曲動作を登録する様子、(b)は登録した動作を再現する様子を示している。
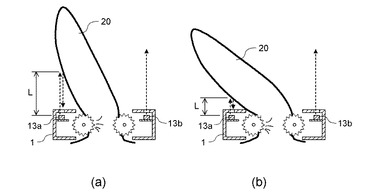
【図6】図6は、フォトリフレクタによる屈曲動作の検知について説明するための図である。
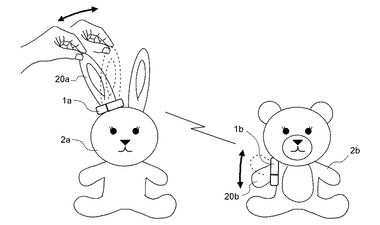
【図7】図7は、リング型アクチュエータの同期機能を説明するための図である。
【発明を実施するための形態】
【0018】
以下、図面を参照して、本発明に係るリング型アクチュエータの好適な実施の形態について詳しく説明する。本発明者らが提案するリング型アクチュエータは、ぬいぐるみや人形の腕、脚、首、耳、尾、胴といった棒状部位を屈曲動作させるものであり、駆動手段を持たない通常のぬいぐるみや人形を簡易的にロボット化するためのものである。このリング型アクチュエータは、例えば、玩具や、子供にロボティクスを学ばせるための教育用具、身の回りの物を利用したコミュニケーションツール等に好適に利用できる。
【0019】
(リング型アクチュエータの構成)
図1は、本発明の実施形態に係るリング型アクチュエータの構成を示しており、(a)は軸方向から見た平面図、(b)は(a)のA−A断面図である。
【0020】
リング型アクチュエータ1の本体10は、ぬいぐるみや人形の棒状部位を挿入するための内周空間が形成されたリング型(ドーナツ型)の形状を呈している。より詳しくは、アクチュエータ本体10は、略半円筒形状の2つのケース部材10a,10bから構成され、これらのケース部材10a,10bはピン10cにより連結され、ピン10cを中心にして開閉可能な構造となっている。ケース部材10a,10bの開放側の先端には、ケース部材10a,10を閉じるためのマグネット14a,14bが設けられている。ケース部材10a,10bの材料としては、樹脂や金属を好適に用いることができる。なお、使用時の安全性を考慮して、アクチュエータ本体10の外面をエラストマや布等の柔軟性を有する材料で覆うことも好ましい。
【0021】
ケース部材10aには、回転部材11a、モータ12a、及びフォトリフレクタ13aが内蔵されている。もう一方のケース部材10bにも同様に、回転部材11b、モータ12b、及びフォトリフレクタ13bが内蔵されている。回転部材11aと11bは対をなすものであり、アクチュエータ本体10の中心軸Bを挟んで対向するように設けられている。また、フォトリフレクタ13a,13bは、回転部材11a,11bに対して径方向外側に配置されている。フォトリフレクタ13a,13bの向きは、その光軸(検知方向)がアクチュエータ本体10の中心軸Bに対して略平行になるように設定されている。なお、ケース部材10a,10bにはフォトリフレクタ13a,13bの光を透過するための孔が設けられている。
【0022】
モータ12a,12bとしては、小型のDCモータを好適に用いることができる。回転部材11a,11bは、モータ12a,12bの回転軸に固定される円盤状の部材であり、ぬいぐるみ等の表面との間に摩擦を生じるものであれば、その形状、材料は問わない。本実施形態では、樹脂で作製されたギア状の回転部材11a,11bを用いている。フォトリフレクタ13a,13bは、発光部としての赤外線LEDと受光部としてのフォトセンサを有しており、発光部から照射した光の反射光を受光部で検出することにより、対象物との距離を計測可能なセンサである。
【0023】
ケース部材10aには、略直方体形状のボックスが設けられており、その中に、マイクロコントローラ15、無線通信部16、バッテリ17が内蔵されている。モータ12a,12b及びフォトリフレクタ13a,13bの制御及び電力供給はここで行われる。本実施形態では、マイクロコントローラ15としてArduino Pro mini、無線通信部16としてZigBeeを用いる。またバッテリ17には、Li−Poバッテリを用いる。
【0024】
なお、図1で示した構成は、本発明の一つの具体例にすぎない。例えば、回転部材の数は2つに限らず、1つでもよいし、3つ以上設けてもよい。回転部材が多くなれば、それだけきめ細やかな(多方向の)屈曲動作を実現できる。複数の回転部材を用いる場合は、アクチュエータ本体10の内周に等間隔に配置することが好ましい。また、本実施形態では連続回転するDCモータを採用したが、これを位置制御可能なサーボモータに置き換えても同様の動作が実現できる。
【0025】
(取り付け方法)
次に、図2及び図3を参照して、リング型アクチュエータ1の取り付け方法について説明する。図2は、取り付け手順を説明するための図であり、図3は、リング型アクチュエータ1を取り付けたぬいぐるみの例を示す図である。
【0026】
取り付け時には、まず図2の上段に示すように、ケース部材10a,10bを外側に引っ張りマグネット14a,14bを引き離す。そうすると、ケース部材10a,10bがピン10cを軸にして回動し、大きく開放する。その状態でぬいぐるみ2の棒状部位20を間に挟んで、ケース部材10a,10bを閉じる。するとマグネット14aと14bが吸着し、リング型アクチュエータ1が棒状部位20を取り巻くように装着される。このとき2つの回転部材11a,11bが棒状部位20の表面に接触(食い込む)ことで、リング型アクチュエータ1の姿勢が安定する。なお、リング型アクチュエータ1をぬいぐるみ2から取り外す場合は、ケース部材10a,10bを外側に引っ張って開放するだけでよい。このように、本実施形態のリング型アクチュエータ1は、特別な工具を使わずとも、誰でも簡単にぬいぐるみ2への取り付け/取り外しが可能である。
【0027】
図3は、ウサギのぬいぐるみ2の棒状部位(右耳)20の付け根にリング型アクチュエ
ータ1を取り付けた例を示している。リング型アクチュエータ1は、アクチュエータ本体の内周空間よりも細く、且つ、回転部材11aと11bの間隔よりも太い部分であれば、どのような棒状部位にも取り付けが可能である。図3のぬいぐるみ2で言えば、耳の他、腕、脚、尾といった部位に取り付けることができる。また棒状部位の付け根でなく、途中部分に取り付けることもできる。なお、図3から分かるように、このリング型アクチュエータ1は、ぬいぐるみ2のアクセサリのようにも見える。そこで例えば、リボン型にするなどアクチュエータ本体のデザインや色を凝ったものにすれば、玩具としてのユニークさを高めることもできる。
【0028】
(屈曲動作)
次に、図4を参照して、リング型アクチュエータ1の動作について説明する。
【0029】
図4(a)は、回転部材11a,11bが回転していない状態を示している。ぬいぐるみ2の棒状部位20は、2つの回転部材11a,11bに挟持されており、いずれの方向にも屈曲していない中立の状態にある。このとき、棒状部位20の延伸方向とリング型アクチュエータ1の軸方向とは略平行になる。
【0030】
図4(b)は、回転部材11a,11bを図の時計回りに回転させたときの状態を示している。このとき、回転部材11aからは、棒状部位20の表面に対し、延伸方向下向きの力が付与され、他方の回転部材11bからは、棒状部位20の表面に対し、延伸方向上向きの力が付与される。そのため、回転部材11aの側では棒状部位20の表面を下向きに引っ張る力が、その反対側では棒状部位20の表面を上向きに押し出す力が作用し、その結果、棒状部位20が回転部材11aの側に屈曲する(倒れる)。
【0031】
図4(c)は、回転部材11a,11bを図の反時計回りに回転させたときの状態を示している。図4(b)の場合とは逆に、回転部材11aの側では棒状部位20を上向きに押し出す力が作用し、回転部材11bの側では棒状部位20を下向きに引っ張る力が作用するため、棒状部位20は回転部材11bの側に屈曲する。
【0032】
このように、回転部材11a,11bの回転方向を切り替えることで、棒状部位20の屈曲方向を制御することができる。また、回転部材11a,11bの回転量を制御することにより、棒状部位20の屈曲角度を調整することもできる。
【0033】
例えば、回転部材11a,11bの回転方向や回転量を定義したプログラムをマイクロコントローラ15のメモリにプリセットしておけば、リング型アクチュエータ1をぬいぐるみ2に取り付けるだけで、所望の屈曲動作を行わせることができる。さらに本実施形態のリング型アクチュエータ1は、屈曲動作を簡単に登録・再現できるようにする機能と、マスタ−スレーブロボットのように、複数のリング型アクチュエータ1を同期して動作させる機能も備える。これらの機能について、以下に説明する。
【0034】
(屈曲動作の登録・再現)
図5は、屈曲動作の登録・再現機能を説明するための図であり、(a)は屈曲動作を登録する様子、(b)は登録した動作を再現する様子を示している。
【0035】
屈曲動作を登録するための操作は、図5(a)に示すように、リング型アクチュエータ1が取り付けられた棒状部位20を所望の方向・角度に屈曲させるだけでよい。これにより、棒状部位20の動きがマイクロコントローラ15に記憶され、その後は、図5(b)のようにマイクロコントローラ15の制御により登録した動作を繰り返し実行することが可能となる。
【0036】
図6を参照して、屈曲動作の登録の仕組みについて詳しく説明する。図6(a)に示すように、ユーザが棒状部位20を図の左側に屈曲させると、フォトリフレクタ13aから照射された赤外光が棒状部位20の左側の表面にて散乱・反射され、その一部がフォトリフレクタ13aのフォトセンサで受光される。これにより、フォトリフレクタ13aから棒状部位20の表面までの距離Lを測定できる。このとき、もう一方のフォトリフレクタ13bでは何も検知されない。したがって、フォトリフレクタ13aと13bの検知結果を比較することで、棒状部位20の屈曲方向を推定することができる。
【0037】
図6(b)は、棒状部位20の屈曲角度を大きくした場合の例である。屈曲角度が大きくなるほど、フォトリフレクタ13aから棒状部位20の表面までの距離Lが小さくなることが分かる。したがって、フォトリフレクタ13aで検知された距離Lに基づいて、棒状部位20の屈曲角度も推定することができる。
【0038】
マイクロコントローラ15は、図5(a)のような登録操作が行われている間、一定の時間間隔でフォトリフレクタ13a,13bの出力を取り込み、棒状部位20の屈曲方向と屈曲角度を計算する。そして、その屈曲動作と同じ動作を回転部材11a,11bの回転で実現するために必要なモータ12a,12bの駆動量を計算し、駆動データとしてメモリ内に記憶する。動作を再現(再生)する際は、マイクロコントローラ15はメモリから駆動データを読み出し、それに基づいてモータ12a,12bを駆動する。このような仕組みによれば、誰でも、簡単かつ直観的な方法で、アクチュエータに対する入力指示、つまりはロボットに対する動作の教示を行うことができるようになる。
【0039】
このとき、マイクロコントローラ15が、フォトリフレクタ13a,13bの出力を用いて、モータ12a,12bの駆動をフィードバック制御することもできる。すなわち、マイクロコントローラ15が、モータ駆動時もフォトリフレクタ13a,13bの検知結果を監視することで、予定していた屈曲角度と実際の屈曲角度とのずれを検知し、そのずれを補正するようにモータの12a,12bの駆動量(回転部材11a,11bの回転量)を調整するのである。これにより、屈曲動作の再現精度を高めることができる。
【0040】
(複数のロボットの同期)
次に、複数のリング型アクチュエータ1を同期させる機能について説明する。
【0041】
図7に示すように、2つのぬいぐるみ2a,2bを用意し、それぞれにリング型アクチュエータ1a,1bを取り付ける。そして、一方のぬいぐるみ2aの棒状部位20aをユーザが屈曲させると、リング型アクチュエータ1aのマイクロコントローラ15がその動作に対応する駆動データを生成し、無線通信部16により駆動データをもう一方のリング型アクチュエータ1bに送信する。なお、駆動データの生成方法については、図6で説明したものと同様である。
【0042】
リング型アクチュエータ1bは、駆動データを受信すると、そのデータに基づいて自身のモータ12a,12bを駆動し、回転部材11a,11bを回転させる。これにより、ぬいぐるみ2bの棒状部位20b(クマの右腕)が、ぬいぐるみ2aの棒状部位20a(ウサギの右耳)と同じように動作する。この仕組みを利用すると、ユーザは複数のロボット(リング型アクチュエータが取り付けられたぬいぐるみ)の動きを同期させることができる。図7では、リング型アクチュエータ1aと1bがアドホックで通信する例を示したが、無線のアクセスポイントや広域ネットワークを経由させることで、ロボットの遠隔操作や、ロボットを利用したテレコミュニケーションなどを実現することも可能である。
【0043】
(本実施形態の利点)
本実施形態のリング型アクチュエータ1によれば、次のような利点がある。
【0044】
まず、ぬいぐるみ等の棒状部位20の周りにアクチュエータ本体10を外付けするだけでよいため、誰でも簡単に取り付け/取り外しの作業を行うことができる。また、ぬいぐるみ等の改造も必要なく、ぬいぐるみ等を損傷する心配もない。しかも、アクチュエータ本体10が巻き付く太さであれば、どのようなぬいぐるみのどのような部位にも取り付けが可能であるため汎用性に優れ、身の回りにある様々な物に取り付けが可能である。
【0045】
また、複数の回転部材11a,11bが設けられているため、回転させる回転部材11a,11bを切り替えたり、あるいは回転方向(順回転/逆回転)を切り替えたりすることによって、棒状部位の屈曲方向を切り替えられるようになり、多様な屈曲動作を実現できるようになる。しかも、対向位置にある2つの回転部材11a,11bを棒状部位の表面に対し互いに逆方向に回転させることとしたので、棒状部位の一方の面に引き方向の力、他方の面に押方向の力が加わるため、棒状部位の屈曲動作をスムーズに行うことができる。
【符号の説明】
【0046】
1,1a,1b:リング型アクチュエータ
10:アクチュエータ本体
10a,10b:ケース部材
10c:ピン
11a,11b:回転部材
12a,12b:モータ
13a,13b:フォトリフレクタ
14a,14b:マグネット
15:マイクロコントローラ
16:無線通信部
17:バッテリ
20,20a,20b:棒状部位
【技術分野】
【0001】
本発明は、ぬいぐるみ、人形等の玩具を屈曲動作させるためのリング型アクチュエータに関する。
【背景技術】
【0002】
動物、キャラクタ等の形態を模したぬいぐるみや人形は、古くから玩具として多くの人に親しまれている。最近では、ロボティクス技術の発展に伴い、手足が動いたり顔の表情が変化したりする家庭用のぬいぐるみロボットも市販されるようになり、従来のように単なる玩具としてだけでなく、子供の教育用具やペットの代替といった新たな用途も生まれてきている。また、特許文献1〜3に述べられているように、ぬいぐるみロボットを、マン−マシンインタフェースやテレコミュニケーションツールとして利用する試みも提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−305670号公報
【特許文献2】特開2003−305669号公報
【特許文献3】特開2009−291328号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のぬいぐるみロボットにおいては、手足等の可動部位を動かすための駆動手段が内部に埋め込まれている構造が一般的であった。例えば特許文献1、2のぬいぐるみでは、モータ、遊星歯車減速機、ポテンショメータ等の機械がぬいぐるみの関節部分に埋設されている。また特許文献3では、ぬいぐるみの腕に沿って糸を通しておき、内蔵のアクチュエータで糸の巻き取り/巻出しを行うことで腕を屈曲させる構造を採用している。
【0005】
このような埋め込み構造は、ぬいぐるみや人形の外観を損なわないという利点がある一方で、ぬいぐるみや人形を解体しなければ(あるいは、ぬいぐるみを縫合したり人形を組み立てたりする前でなければ)、駆動手段の取り付けやメンテナンスを行うことができないという不利がある。また、内部に埋め込む必要から、駆動手段のサイズ、形状、構造等に物理的な制約が生じるため、個々のぬいぐるみの形に適合するように駆動手段を設計しなければならず、汎用性に欠けるという問題もある。したがって、従来は、子供や一般消費者が、所有している普通のぬいぐるみをロボットのように動かしてみたいと望んだとしても、その改造(駆動手段の埋め込み)には工学的な専門知識が必要となり、実現が容易でなかった。
【0006】
本発明はかかる実情に鑑みてなされたものであって、その目的とするところは、ぬいぐるみや人形への取り付けを誰でも簡単に行うことができ、且つ、汎用性に優れたアクチュエータを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明者らは、ぬいぐるみや人形に対して着脱自在な外付けタイプのアクチュエータを提案する。
【0008】
具体的には、本発明に係るアクチュエータは、ぬいぐるみ又は人形の棒状部位を屈曲動作させるためのリング型アクチュエータであって、前記棒状部位を取り巻くように、前記
棒状部位に対して取り付けられるリング型のアクチュエータ本体と、前記アクチュエータ本体を前記棒状部位に取り付けたときに前記棒状部位の表面に接触するように、前記アクチュエータ本体の内周に設けられた回転部材と、前記回転部材を回転させるモータと、制御部と、を有し、前記制御部が、前記モータにより前記回転部材を回転させて、前記棒状部位の表面に対し前記棒状部位の延伸方向に沿う方向の力を付与することによって、前記棒状部位を屈曲させることを特徴とするものである。
【0009】
「棒状部位」とは、ぬいぐるみや人形において、屈曲動作が可能な程度の太さ及び長さを有する部位を意味し、例えば、人又は動物を模したぬいぐるみや人形の場合は、腕、脚、首、耳、尾等が該当する。本発明のアクチュエータによれば、ぬいぐるみ等の棒状部位の周りにアクチュエータ本体を外付けするだけでよいため、誰でも簡単に取り付け/取り外しの作業を行うことができる。しかも、アクチュエータ本体が巻き付く太さであれば、どのようなぬいぐるみのどのような部位にも取り付けが可能であるため、汎用性に優れる。以下、アクチュエータが取り付けられたぬいぐるみや人形を「ロボット」と呼ぶ。
【0010】
ここで、前記アクチュエータ本体の内周に、独立に制御可能な複数の回転部材が設けられていることが好ましい。これにより、前記制御部が、回転させる回転部材を切り替えたり、あるいは回転方向(順回転/逆回転)を切り替えたりすることによって、前記棒状部位の屈曲方向を切り替えられるようになり、多様な屈曲動作を実現できるようになる。
【0011】
さらに、前記制御部が、対向する位置にある2つの回転部材を、前記棒状部位の表面に対し互いに逆方向に回転させるとよい。これにより、棒状部位の一方の面に引き方向の力、他方の面に押し方向の力が加わるため、棒状部位の屈曲動作をスムーズに行うことができる。
【0012】
前記棒状部位の屈曲を検知するセンサが前記アクチュエータ本体に設けられていることが好ましい。センサの検知結果は、例えば、モータ及び回転部材の動作の検証(動作テスト)、フィードバック制御等に利用することができる。また後述するように、ユーザが棒状部位を屈曲させるという操作を、アクチュエータに対する入力指示として利用することもできる。なお、センサ自体もアクチュエータ本体に設けられているため、ぬいぐるみに対する取り付けが容易である。
【0013】
ここで、前記センサが、前記アクチュエータ本体を前記棒状部位に取り付けたときに前記棒状部位の延伸方向に対して略平行になるように設けられたフォトリフレクタであることが好ましい。具体的には、フォトリフレクタの光軸が棒状部位の表面からやや離れ、且つ、棒状部位の延伸方向に対して略平行になるよう配置され、棒状部位が屈曲していない状態において受光量が最も小さく、棒状部位の屈曲が大きくなるほど受光量が増加するような構成である。この構成により、棒状部位に対して非接触で、棒状部位の屈曲の方向と角度を簡易的に検知することができる。
【0014】
前記制御部は、前記センサにより前記棒状部位の屈曲を検知した場合に、前記検知した屈曲動作と同じ動作を前記回転部材で実現するために必要な前記モータの駆動量を計算し、駆動データとして記憶する手段と、前記記憶した駆動データに基づいて前記モータを駆動することにより、前記検知した屈曲動作と同じ動作を前記棒状部位に再現させる手段と、を有することが好ましい。この構成によれば、ユーザが棒状部位を好きな方向及び角度で屈曲させるだけで、その屈曲動作がアクチュエータに記憶され、アクチュエータの制御によって同じ屈曲動作が再現される。これにより、誰でも、簡単かつ直観的な方法で、アクチュエータに対する入力指示、つまりはロボットに対する動作の教示を行うことができるようになる。
【0015】
さらに、第2のリング型アクチュエータと無線通信を行うための無線通信部が前記アクチュエータ本体に設けられており、前記制御部は、前記記憶した駆動データを前記無線通信部により前記第2のリング型アクチュエータに対して送信することにより、自身が取り付けられた前記棒状部位と同じ動作を前記第2のリング型アクチュエータが取り付けられた第2の棒状部位に再現させる手段と、前記無線通信部により前記第2のリング型アクチュエータから駆動データを受信した場合に、前記受信した駆動データに基づいて前記モータを駆動することにより、前記第2の棒状部位と同じ動作を前記棒状部位に再現させる手段と、を有することが好ましい。この構成によれば、複数のアクチュエータの動作、つまりは複数のロボット(あるいは1つロボットにおける複数の部位)の動きを簡単に同期させることができる。この機能は、例えば、ロボットの連係動作や、遠隔操作、ロボットを利用したテレコミュニケーションなどに利用可能である。
【発明の効果】
【0016】
本発明によれば、ぬいぐるみや人形への取り付けを誰でも簡単に行うことができ、且つ、汎用性に優れたアクチュエータを提供することが可能である。
【図面の簡単な説明】
【0017】
【図1】図1は、本発明の実施形態に係るリング型アクチュエータの構成を示しており、(a)は軸方向から見た平面図、(b)は(a)のA−A断面図である。
【図2】図2は、取り付け手順を説明するための図である。
【図3】図3は、リング型アクチュエータを取り付けたぬいぐるみの例を示す図である。
【図4】図4は、リング型アクチュエータの動作について説明するための図である。
【図5】図5は、屈曲動作の登録・再現機能を説明するための図であり、(a)は屈曲動作を登録する様子、(b)は登録した動作を再現する様子を示している。
【図6】図6は、フォトリフレクタによる屈曲動作の検知について説明するための図である。
【図7】図7は、リング型アクチュエータの同期機能を説明するための図である。
【発明を実施するための形態】
【0018】
以下、図面を参照して、本発明に係るリング型アクチュエータの好適な実施の形態について詳しく説明する。本発明者らが提案するリング型アクチュエータは、ぬいぐるみや人形の腕、脚、首、耳、尾、胴といった棒状部位を屈曲動作させるものであり、駆動手段を持たない通常のぬいぐるみや人形を簡易的にロボット化するためのものである。このリング型アクチュエータは、例えば、玩具や、子供にロボティクスを学ばせるための教育用具、身の回りの物を利用したコミュニケーションツール等に好適に利用できる。
【0019】
(リング型アクチュエータの構成)
図1は、本発明の実施形態に係るリング型アクチュエータの構成を示しており、(a)は軸方向から見た平面図、(b)は(a)のA−A断面図である。
【0020】
リング型アクチュエータ1の本体10は、ぬいぐるみや人形の棒状部位を挿入するための内周空間が形成されたリング型(ドーナツ型)の形状を呈している。より詳しくは、アクチュエータ本体10は、略半円筒形状の2つのケース部材10a,10bから構成され、これらのケース部材10a,10bはピン10cにより連結され、ピン10cを中心にして開閉可能な構造となっている。ケース部材10a,10bの開放側の先端には、ケース部材10a,10を閉じるためのマグネット14a,14bが設けられている。ケース部材10a,10bの材料としては、樹脂や金属を好適に用いることができる。なお、使用時の安全性を考慮して、アクチュエータ本体10の外面をエラストマや布等の柔軟性を有する材料で覆うことも好ましい。
【0021】
ケース部材10aには、回転部材11a、モータ12a、及びフォトリフレクタ13aが内蔵されている。もう一方のケース部材10bにも同様に、回転部材11b、モータ12b、及びフォトリフレクタ13bが内蔵されている。回転部材11aと11bは対をなすものであり、アクチュエータ本体10の中心軸Bを挟んで対向するように設けられている。また、フォトリフレクタ13a,13bは、回転部材11a,11bに対して径方向外側に配置されている。フォトリフレクタ13a,13bの向きは、その光軸(検知方向)がアクチュエータ本体10の中心軸Bに対して略平行になるように設定されている。なお、ケース部材10a,10bにはフォトリフレクタ13a,13bの光を透過するための孔が設けられている。
【0022】
モータ12a,12bとしては、小型のDCモータを好適に用いることができる。回転部材11a,11bは、モータ12a,12bの回転軸に固定される円盤状の部材であり、ぬいぐるみ等の表面との間に摩擦を生じるものであれば、その形状、材料は問わない。本実施形態では、樹脂で作製されたギア状の回転部材11a,11bを用いている。フォトリフレクタ13a,13bは、発光部としての赤外線LEDと受光部としてのフォトセンサを有しており、発光部から照射した光の反射光を受光部で検出することにより、対象物との距離を計測可能なセンサである。
【0023】
ケース部材10aには、略直方体形状のボックスが設けられており、その中に、マイクロコントローラ15、無線通信部16、バッテリ17が内蔵されている。モータ12a,12b及びフォトリフレクタ13a,13bの制御及び電力供給はここで行われる。本実施形態では、マイクロコントローラ15としてArduino Pro mini、無線通信部16としてZigBeeを用いる。またバッテリ17には、Li−Poバッテリを用いる。
【0024】
なお、図1で示した構成は、本発明の一つの具体例にすぎない。例えば、回転部材の数は2つに限らず、1つでもよいし、3つ以上設けてもよい。回転部材が多くなれば、それだけきめ細やかな(多方向の)屈曲動作を実現できる。複数の回転部材を用いる場合は、アクチュエータ本体10の内周に等間隔に配置することが好ましい。また、本実施形態では連続回転するDCモータを採用したが、これを位置制御可能なサーボモータに置き換えても同様の動作が実現できる。
【0025】
(取り付け方法)
次に、図2及び図3を参照して、リング型アクチュエータ1の取り付け方法について説明する。図2は、取り付け手順を説明するための図であり、図3は、リング型アクチュエータ1を取り付けたぬいぐるみの例を示す図である。
【0026】
取り付け時には、まず図2の上段に示すように、ケース部材10a,10bを外側に引っ張りマグネット14a,14bを引き離す。そうすると、ケース部材10a,10bがピン10cを軸にして回動し、大きく開放する。その状態でぬいぐるみ2の棒状部位20を間に挟んで、ケース部材10a,10bを閉じる。するとマグネット14aと14bが吸着し、リング型アクチュエータ1が棒状部位20を取り巻くように装着される。このとき2つの回転部材11a,11bが棒状部位20の表面に接触(食い込む)ことで、リング型アクチュエータ1の姿勢が安定する。なお、リング型アクチュエータ1をぬいぐるみ2から取り外す場合は、ケース部材10a,10bを外側に引っ張って開放するだけでよい。このように、本実施形態のリング型アクチュエータ1は、特別な工具を使わずとも、誰でも簡単にぬいぐるみ2への取り付け/取り外しが可能である。
【0027】
図3は、ウサギのぬいぐるみ2の棒状部位(右耳)20の付け根にリング型アクチュエ
ータ1を取り付けた例を示している。リング型アクチュエータ1は、アクチュエータ本体の内周空間よりも細く、且つ、回転部材11aと11bの間隔よりも太い部分であれば、どのような棒状部位にも取り付けが可能である。図3のぬいぐるみ2で言えば、耳の他、腕、脚、尾といった部位に取り付けることができる。また棒状部位の付け根でなく、途中部分に取り付けることもできる。なお、図3から分かるように、このリング型アクチュエータ1は、ぬいぐるみ2のアクセサリのようにも見える。そこで例えば、リボン型にするなどアクチュエータ本体のデザインや色を凝ったものにすれば、玩具としてのユニークさを高めることもできる。
【0028】
(屈曲動作)
次に、図4を参照して、リング型アクチュエータ1の動作について説明する。
【0029】
図4(a)は、回転部材11a,11bが回転していない状態を示している。ぬいぐるみ2の棒状部位20は、2つの回転部材11a,11bに挟持されており、いずれの方向にも屈曲していない中立の状態にある。このとき、棒状部位20の延伸方向とリング型アクチュエータ1の軸方向とは略平行になる。
【0030】
図4(b)は、回転部材11a,11bを図の時計回りに回転させたときの状態を示している。このとき、回転部材11aからは、棒状部位20の表面に対し、延伸方向下向きの力が付与され、他方の回転部材11bからは、棒状部位20の表面に対し、延伸方向上向きの力が付与される。そのため、回転部材11aの側では棒状部位20の表面を下向きに引っ張る力が、その反対側では棒状部位20の表面を上向きに押し出す力が作用し、その結果、棒状部位20が回転部材11aの側に屈曲する(倒れる)。
【0031】
図4(c)は、回転部材11a,11bを図の反時計回りに回転させたときの状態を示している。図4(b)の場合とは逆に、回転部材11aの側では棒状部位20を上向きに押し出す力が作用し、回転部材11bの側では棒状部位20を下向きに引っ張る力が作用するため、棒状部位20は回転部材11bの側に屈曲する。
【0032】
このように、回転部材11a,11bの回転方向を切り替えることで、棒状部位20の屈曲方向を制御することができる。また、回転部材11a,11bの回転量を制御することにより、棒状部位20の屈曲角度を調整することもできる。
【0033】
例えば、回転部材11a,11bの回転方向や回転量を定義したプログラムをマイクロコントローラ15のメモリにプリセットしておけば、リング型アクチュエータ1をぬいぐるみ2に取り付けるだけで、所望の屈曲動作を行わせることができる。さらに本実施形態のリング型アクチュエータ1は、屈曲動作を簡単に登録・再現できるようにする機能と、マスタ−スレーブロボットのように、複数のリング型アクチュエータ1を同期して動作させる機能も備える。これらの機能について、以下に説明する。
【0034】
(屈曲動作の登録・再現)
図5は、屈曲動作の登録・再現機能を説明するための図であり、(a)は屈曲動作を登録する様子、(b)は登録した動作を再現する様子を示している。
【0035】
屈曲動作を登録するための操作は、図5(a)に示すように、リング型アクチュエータ1が取り付けられた棒状部位20を所望の方向・角度に屈曲させるだけでよい。これにより、棒状部位20の動きがマイクロコントローラ15に記憶され、その後は、図5(b)のようにマイクロコントローラ15の制御により登録した動作を繰り返し実行することが可能となる。
【0036】
図6を参照して、屈曲動作の登録の仕組みについて詳しく説明する。図6(a)に示すように、ユーザが棒状部位20を図の左側に屈曲させると、フォトリフレクタ13aから照射された赤外光が棒状部位20の左側の表面にて散乱・反射され、その一部がフォトリフレクタ13aのフォトセンサで受光される。これにより、フォトリフレクタ13aから棒状部位20の表面までの距離Lを測定できる。このとき、もう一方のフォトリフレクタ13bでは何も検知されない。したがって、フォトリフレクタ13aと13bの検知結果を比較することで、棒状部位20の屈曲方向を推定することができる。
【0037】
図6(b)は、棒状部位20の屈曲角度を大きくした場合の例である。屈曲角度が大きくなるほど、フォトリフレクタ13aから棒状部位20の表面までの距離Lが小さくなることが分かる。したがって、フォトリフレクタ13aで検知された距離Lに基づいて、棒状部位20の屈曲角度も推定することができる。
【0038】
マイクロコントローラ15は、図5(a)のような登録操作が行われている間、一定の時間間隔でフォトリフレクタ13a,13bの出力を取り込み、棒状部位20の屈曲方向と屈曲角度を計算する。そして、その屈曲動作と同じ動作を回転部材11a,11bの回転で実現するために必要なモータ12a,12bの駆動量を計算し、駆動データとしてメモリ内に記憶する。動作を再現(再生)する際は、マイクロコントローラ15はメモリから駆動データを読み出し、それに基づいてモータ12a,12bを駆動する。このような仕組みによれば、誰でも、簡単かつ直観的な方法で、アクチュエータに対する入力指示、つまりはロボットに対する動作の教示を行うことができるようになる。
【0039】
このとき、マイクロコントローラ15が、フォトリフレクタ13a,13bの出力を用いて、モータ12a,12bの駆動をフィードバック制御することもできる。すなわち、マイクロコントローラ15が、モータ駆動時もフォトリフレクタ13a,13bの検知結果を監視することで、予定していた屈曲角度と実際の屈曲角度とのずれを検知し、そのずれを補正するようにモータの12a,12bの駆動量(回転部材11a,11bの回転量)を調整するのである。これにより、屈曲動作の再現精度を高めることができる。
【0040】
(複数のロボットの同期)
次に、複数のリング型アクチュエータ1を同期させる機能について説明する。
【0041】
図7に示すように、2つのぬいぐるみ2a,2bを用意し、それぞれにリング型アクチュエータ1a,1bを取り付ける。そして、一方のぬいぐるみ2aの棒状部位20aをユーザが屈曲させると、リング型アクチュエータ1aのマイクロコントローラ15がその動作に対応する駆動データを生成し、無線通信部16により駆動データをもう一方のリング型アクチュエータ1bに送信する。なお、駆動データの生成方法については、図6で説明したものと同様である。
【0042】
リング型アクチュエータ1bは、駆動データを受信すると、そのデータに基づいて自身のモータ12a,12bを駆動し、回転部材11a,11bを回転させる。これにより、ぬいぐるみ2bの棒状部位20b(クマの右腕)が、ぬいぐるみ2aの棒状部位20a(ウサギの右耳)と同じように動作する。この仕組みを利用すると、ユーザは複数のロボット(リング型アクチュエータが取り付けられたぬいぐるみ)の動きを同期させることができる。図7では、リング型アクチュエータ1aと1bがアドホックで通信する例を示したが、無線のアクセスポイントや広域ネットワークを経由させることで、ロボットの遠隔操作や、ロボットを利用したテレコミュニケーションなどを実現することも可能である。
【0043】
(本実施形態の利点)
本実施形態のリング型アクチュエータ1によれば、次のような利点がある。
【0044】
まず、ぬいぐるみ等の棒状部位20の周りにアクチュエータ本体10を外付けするだけでよいため、誰でも簡単に取り付け/取り外しの作業を行うことができる。また、ぬいぐるみ等の改造も必要なく、ぬいぐるみ等を損傷する心配もない。しかも、アクチュエータ本体10が巻き付く太さであれば、どのようなぬいぐるみのどのような部位にも取り付けが可能であるため汎用性に優れ、身の回りにある様々な物に取り付けが可能である。
【0045】
また、複数の回転部材11a,11bが設けられているため、回転させる回転部材11a,11bを切り替えたり、あるいは回転方向(順回転/逆回転)を切り替えたりすることによって、棒状部位の屈曲方向を切り替えられるようになり、多様な屈曲動作を実現できるようになる。しかも、対向位置にある2つの回転部材11a,11bを棒状部位の表面に対し互いに逆方向に回転させることとしたので、棒状部位の一方の面に引き方向の力、他方の面に押方向の力が加わるため、棒状部位の屈曲動作をスムーズに行うことができる。
【符号の説明】
【0046】
1,1a,1b:リング型アクチュエータ
10:アクチュエータ本体
10a,10b:ケース部材
10c:ピン
11a,11b:回転部材
12a,12b:モータ
13a,13b:フォトリフレクタ
14a,14b:マグネット
15:マイクロコントローラ
16:無線通信部
17:バッテリ
20,20a,20b:棒状部位
【特許請求の範囲】
【請求項1】
ぬいぐるみ又は人形の棒状部位を屈曲動作させるためのリング型アクチュエータであって、
前記棒状部位を取り巻くように、前記棒状部位に対して取り付けられるリング型のアクチュエータ本体と、
前記アクチュエータ本体を前記棒状部位に取り付けたときに前記棒状部位の表面に接触するように、前記アクチュエータ本体の内周に設けられた回転部材と、
前記回転部材を回転させるモータと、
制御部と、を有し、
前記制御部が、前記モータにより前記回転部材を回転させて、前記棒状部位の表面に対し前記棒状部位の延伸方向に沿う方向の力を付与することによって、前記棒状部位を屈曲させる
ことを特徴とするリング型アクチュエータ。
【請求項2】
前記アクチュエータ本体の内周に、複数の回転部材が設けられており、
前記制御部が、回転させる回転部材を切り替えることによって、前記棒状部位の屈曲方向を切り替える
ことを特徴とする請求項1に記載のリング型アクチュエータ。
【請求項3】
前記制御部が、対向する位置にある2つの回転部材を、前記棒状部位の表面に対し互いに逆方向に回転させる
ことを特徴とする請求項2に記載のリング型アクチュエータ。
【請求項4】
前記棒状部位の屈曲を検知するセンサが前記アクチュエータ本体に設けられている
ことを特徴とする請求項1〜3のうちいずれか1項に記載のリング型アクチュエータ。
【請求項5】
前記センサは、前記アクチュエータ本体を前記棒状部位に取り付けたときに前記棒状部位の延伸方向に対して略平行になるように設けられたフォトリフレクタである
ことを特徴とする請求項4に記載のリング型アクチュエータ。
【請求項6】
前記制御部は、
前記センサにより前記棒状部位の屈曲を検知した場合に、前記検知した屈曲動作と同じ動作を前記回転部材で実現するために必要な前記モータの駆動量を計算し、駆動データとして記憶する手段と、
前記記憶した駆動データに基づいて前記モータを駆動することにより、前記検知した屈曲動作と同じ動作を前記棒状部位に再現させる手段と、を有する
ことを特徴とする請求項4又は5に記載のリング型アクチュエータ。
【請求項7】
第2のリング型アクチュエータと無線通信を行うための無線通信部が前記アクチュエータ本体に設けられており、
前記制御部は、
前記記憶した駆動データを前記無線通信部により前記第2のリング型アクチュエータに対して送信することにより、自身が取り付けられた前記棒状部位と同じ動作を前記第2のリング型アクチュエータが取り付けられた第2の棒状部位に再現させる手段と、
前記無線通信部により前記第2のリング型アクチュエータから駆動データを受信した場合に、前記受信した駆動データに基づいて前記モータを駆動することにより、前記第2の棒状部位と同じ動作を前記棒状部位に再現させる手段と、を有する
ことを特徴とする請求項6に記載のリング型アクチュエータ。
【請求項1】
ぬいぐるみ又は人形の棒状部位を屈曲動作させるためのリング型アクチュエータであって、
前記棒状部位を取り巻くように、前記棒状部位に対して取り付けられるリング型のアクチュエータ本体と、
前記アクチュエータ本体を前記棒状部位に取り付けたときに前記棒状部位の表面に接触するように、前記アクチュエータ本体の内周に設けられた回転部材と、
前記回転部材を回転させるモータと、
制御部と、を有し、
前記制御部が、前記モータにより前記回転部材を回転させて、前記棒状部位の表面に対し前記棒状部位の延伸方向に沿う方向の力を付与することによって、前記棒状部位を屈曲させる
ことを特徴とするリング型アクチュエータ。
【請求項2】
前記アクチュエータ本体の内周に、複数の回転部材が設けられており、
前記制御部が、回転させる回転部材を切り替えることによって、前記棒状部位の屈曲方向を切り替える
ことを特徴とする請求項1に記載のリング型アクチュエータ。
【請求項3】
前記制御部が、対向する位置にある2つの回転部材を、前記棒状部位の表面に対し互いに逆方向に回転させる
ことを特徴とする請求項2に記載のリング型アクチュエータ。
【請求項4】
前記棒状部位の屈曲を検知するセンサが前記アクチュエータ本体に設けられている
ことを特徴とする請求項1〜3のうちいずれか1項に記載のリング型アクチュエータ。
【請求項5】
前記センサは、前記アクチュエータ本体を前記棒状部位に取り付けたときに前記棒状部位の延伸方向に対して略平行になるように設けられたフォトリフレクタである
ことを特徴とする請求項4に記載のリング型アクチュエータ。
【請求項6】
前記制御部は、
前記センサにより前記棒状部位の屈曲を検知した場合に、前記検知した屈曲動作と同じ動作を前記回転部材で実現するために必要な前記モータの駆動量を計算し、駆動データとして記憶する手段と、
前記記憶した駆動データに基づいて前記モータを駆動することにより、前記検知した屈曲動作と同じ動作を前記棒状部位に再現させる手段と、を有する
ことを特徴とする請求項4又は5に記載のリング型アクチュエータ。
【請求項7】
第2のリング型アクチュエータと無線通信を行うための無線通信部が前記アクチュエータ本体に設けられており、
前記制御部は、
前記記憶した駆動データを前記無線通信部により前記第2のリング型アクチュエータに対して送信することにより、自身が取り付けられた前記棒状部位と同じ動作を前記第2のリング型アクチュエータが取り付けられた第2の棒状部位に再現させる手段と、
前記無線通信部により前記第2のリング型アクチュエータから駆動データを受信した場合に、前記受信した駆動データに基づいて前記モータを駆動することにより、前記第2の棒状部位と同じ動作を前記棒状部位に再現させる手段と、を有する
ことを特徴とする請求項6に記載のリング型アクチュエータ。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−42916(P2013−42916A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−182496(P2011−182496)
【出願日】平成23年8月24日(2011.8.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ZIGBEE
【出願人】(503360115)独立行政法人科学技術振興機構 (1,734)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月24日(2011.8.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ZIGBEE
【出願人】(503360115)独立行政法人科学技術振興機構 (1,734)
【Fターム(参考)】
[ Back to top ]